A True-Color Sensor and Suitable Evaluation Algorithm for Plant Recognition

Abstract
:1. Introduction
- ○
- Arable land with crops like wheat or rape
- ○
- Green areas with grass and broadleaf dock or lawn/golf courses with clover
2. State of the Art
2.1. Opto-Electronic Sensors
2.2. Imaging Techniques
2.3. Plant Identification through Plant Contours without a Camera
3. Material and Methods
3.1. Materials
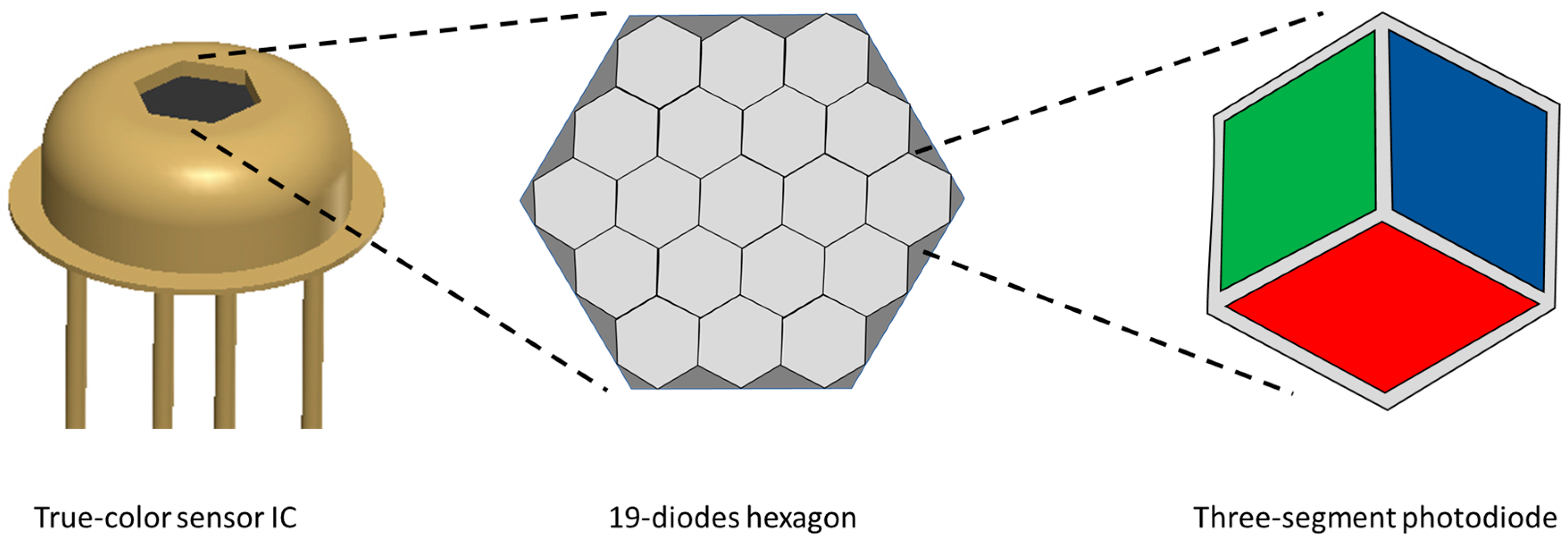
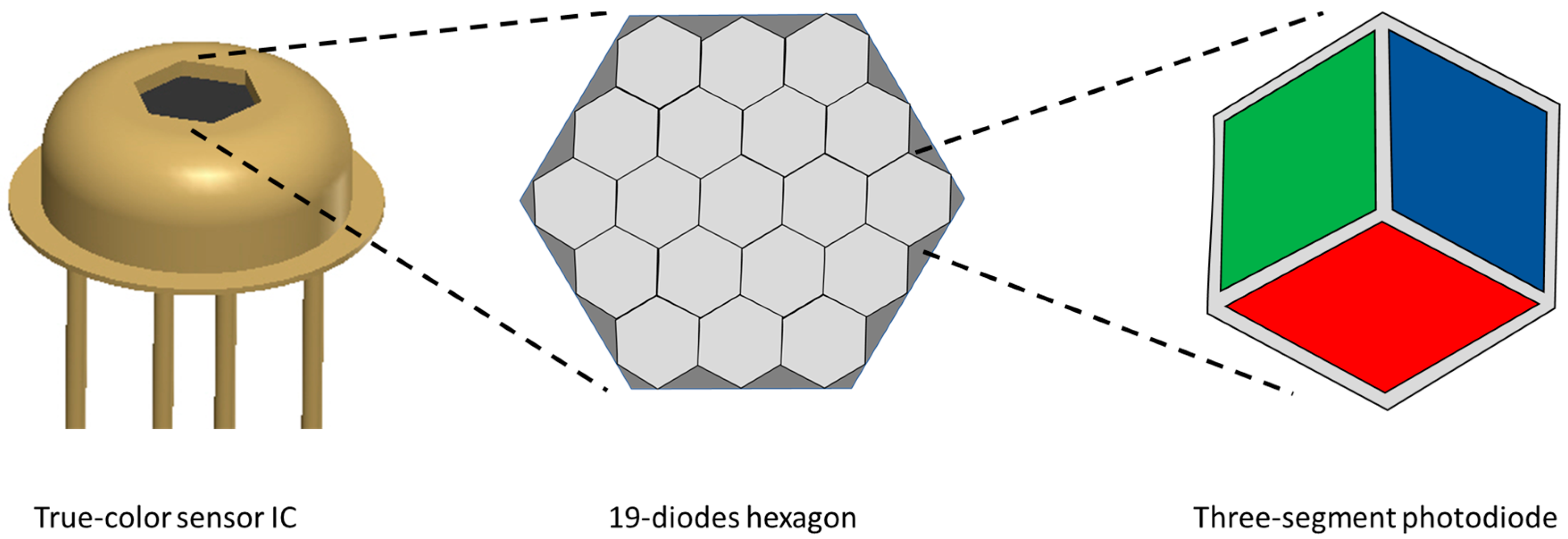
3.1.1. Sensor Technology
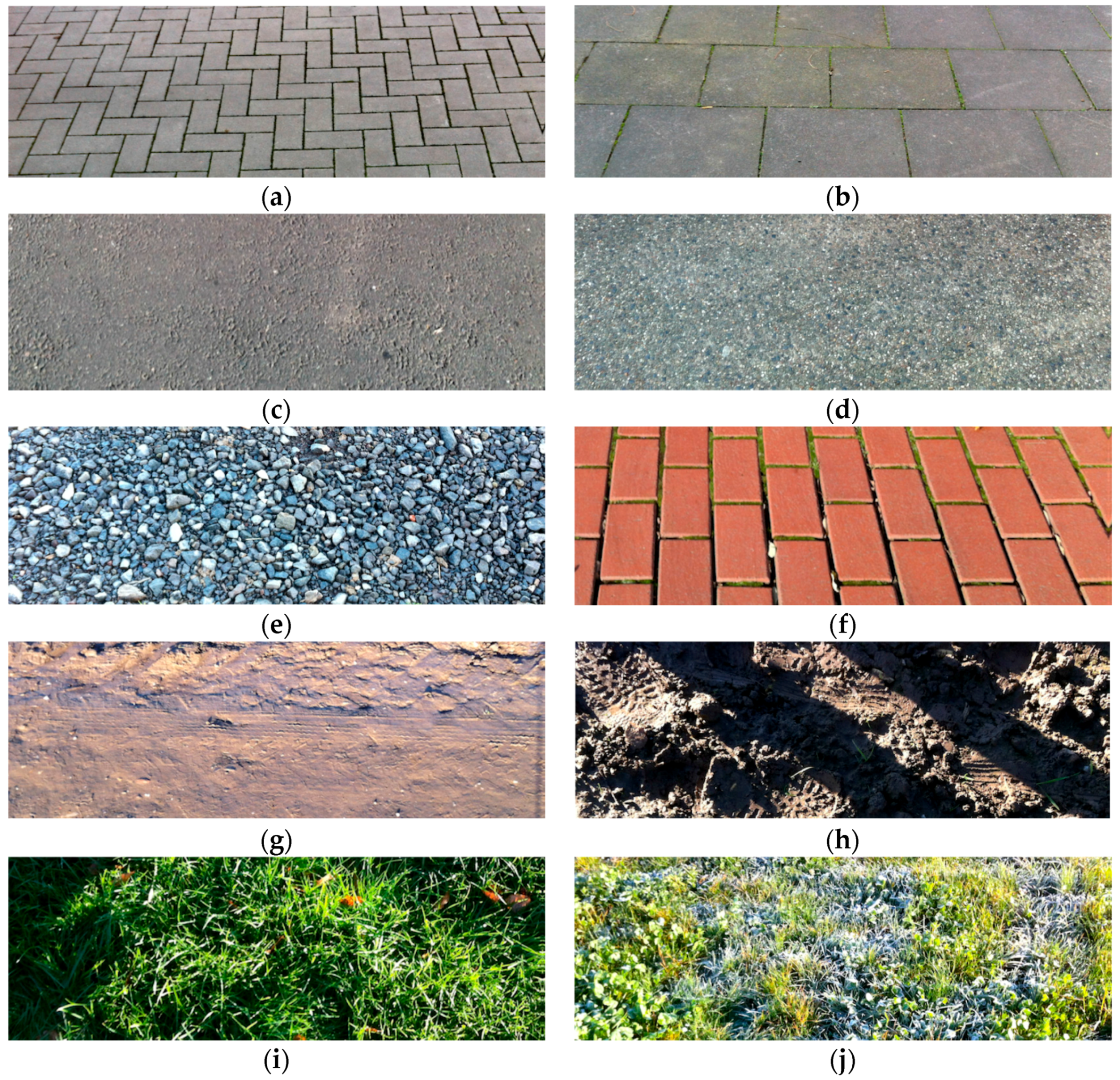
3.1.2. Objects and Backgrounds
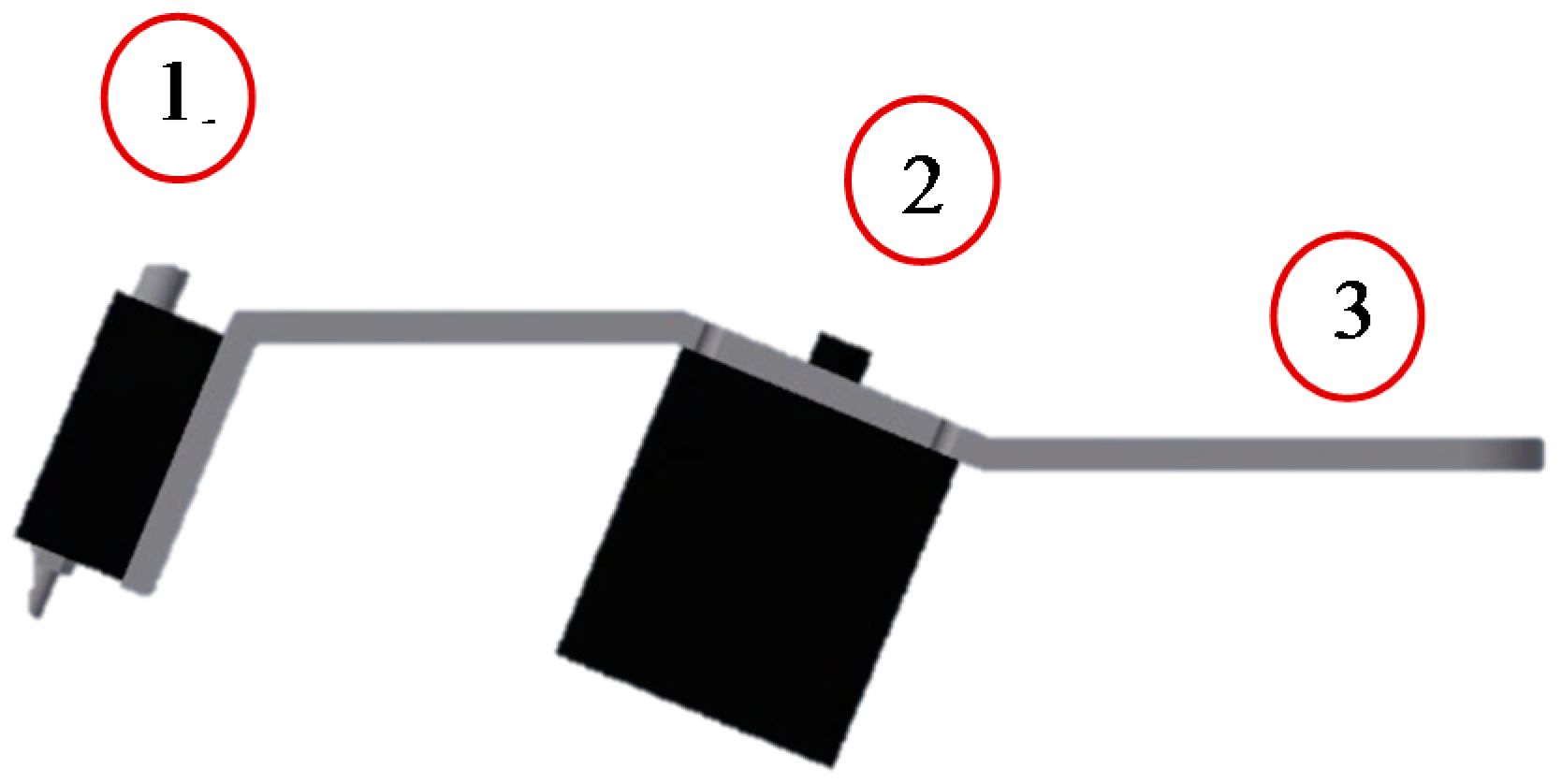
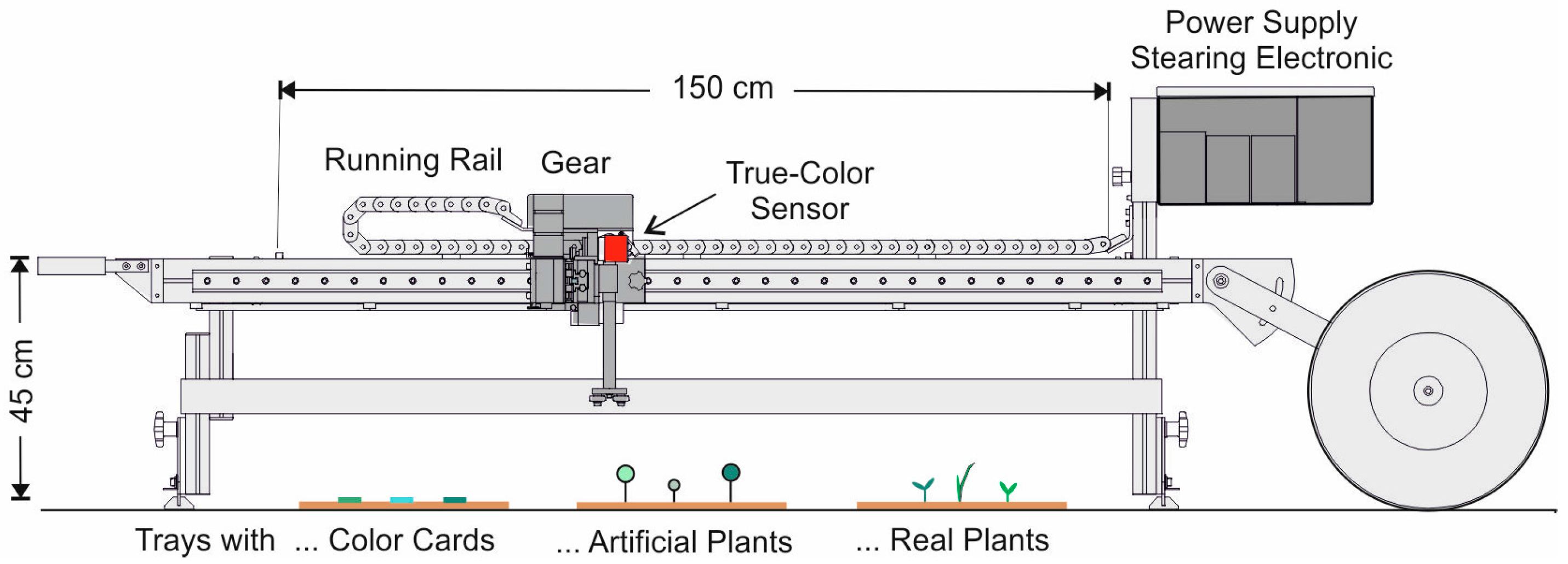
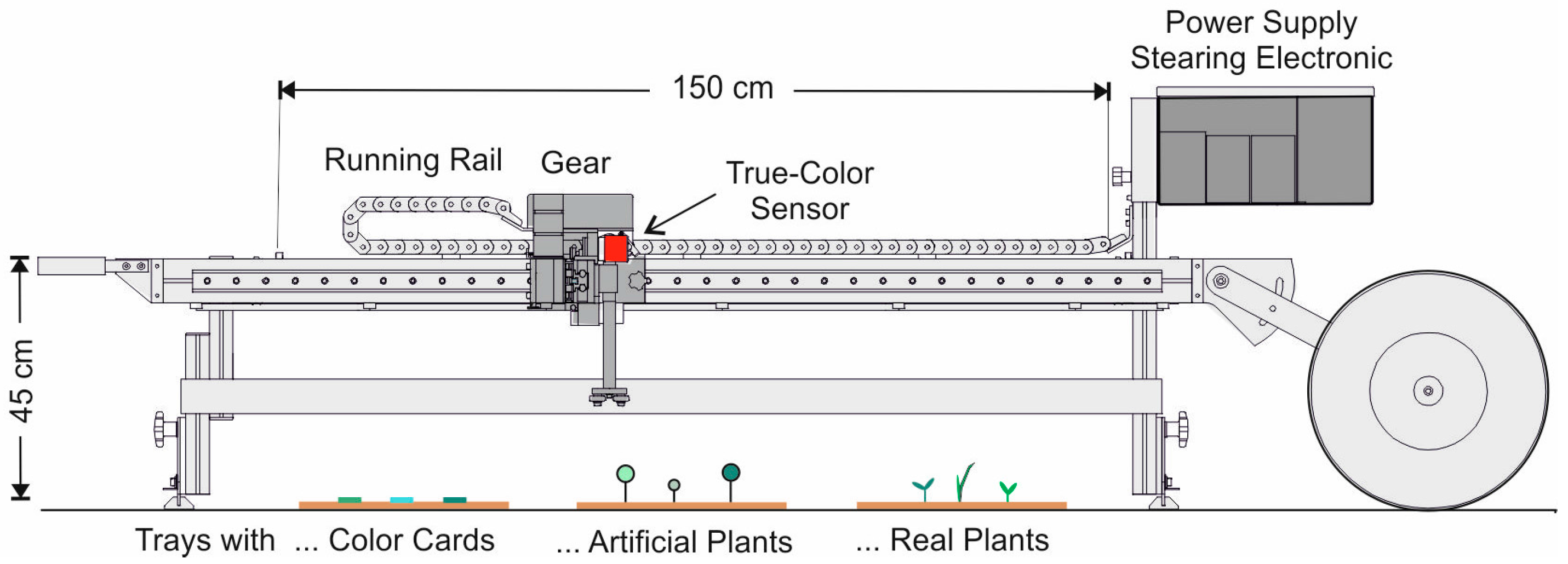
3.1.3. Test Facilities
3.2. Methods
3.2.1. Characterization of Backgrounds
3.2.2. Data Management and Processing
3.2.3. Decision Making Based on Analyzing the Color Similarity of Mixed Areas
3.2.4. Decision Making Based on Modeling
4. Results and Discussion
4.1. Database to Characterize Backgrounds
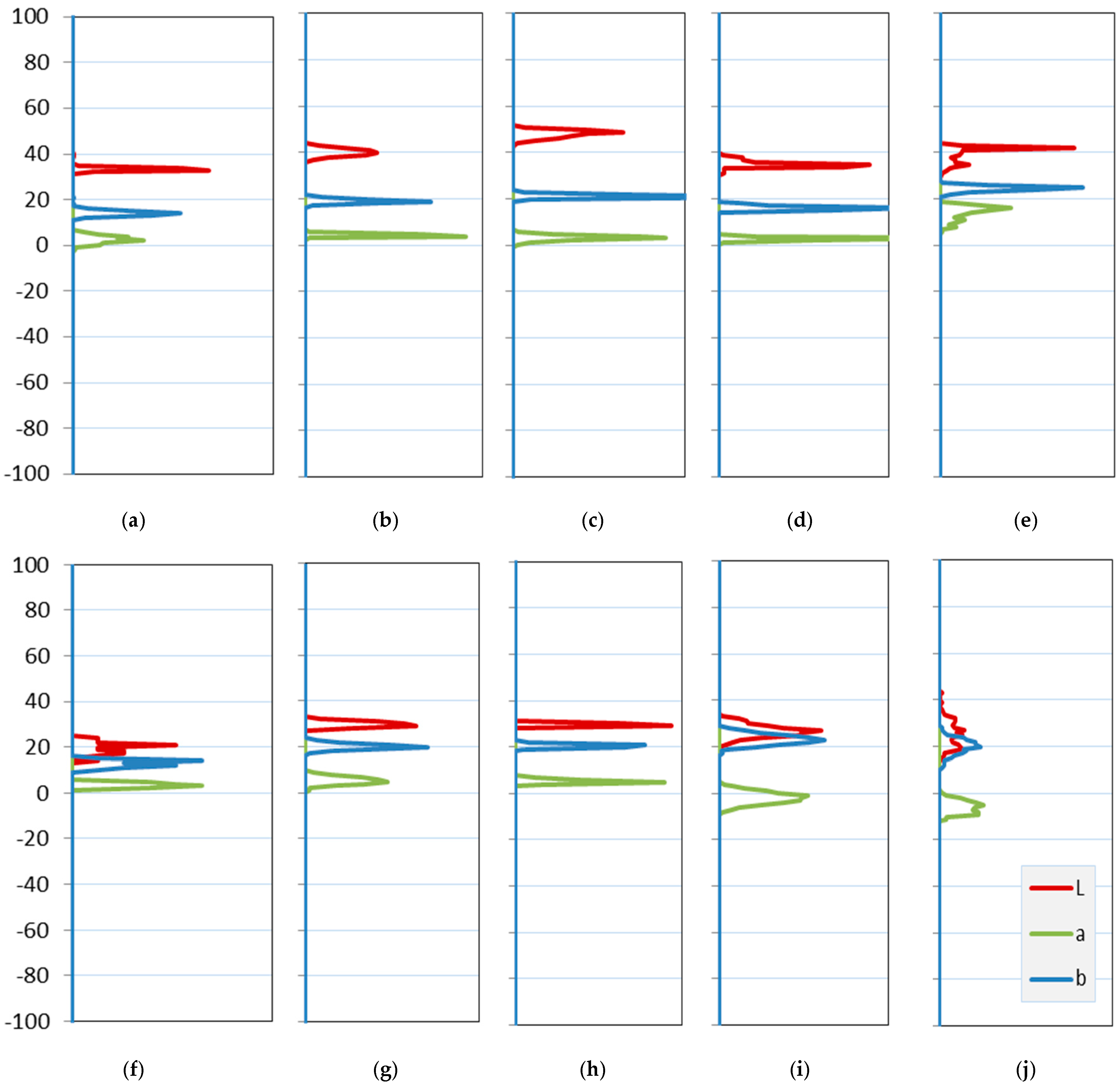
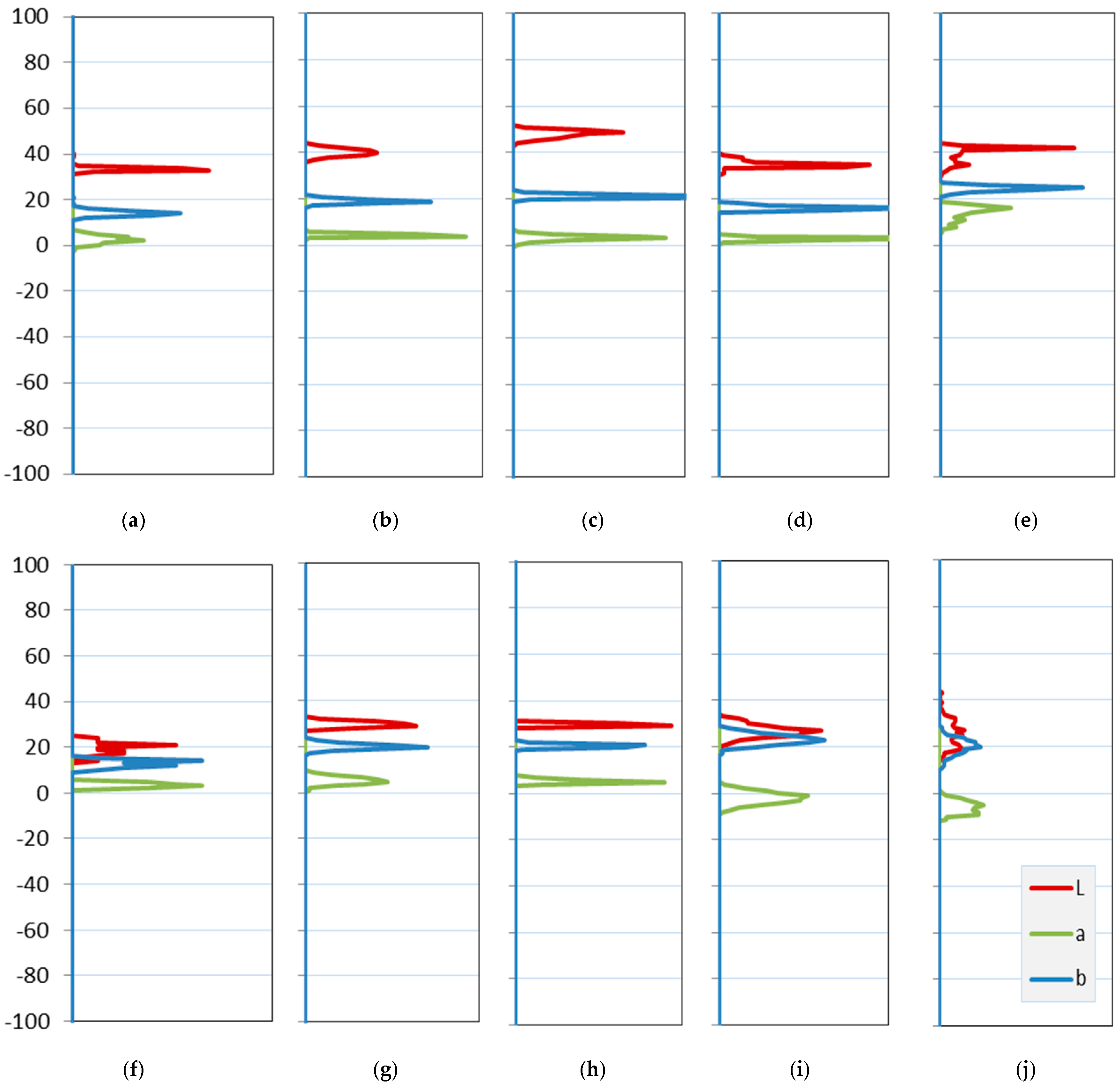
4.2. Characterization of Different Green Tones in Regard to Plant Recognition
4.3. Object Identification by Analyzing Color Similarity
4.4. Object Identification by Modeling
5. Summary and Conclusions
- Normalization and adjusting of the sensor in the field. On a place without weeds, the background properties are determined, and a threshold for discrimination will be defined.
- Selection of the mode: positive or negative detection.
- Selection and upload of the algorithms and database with reflection properties to each sensor-valve-nozzle unit.
- Running the plant recognition and differentiation process.
- Control of the sprayer valve.
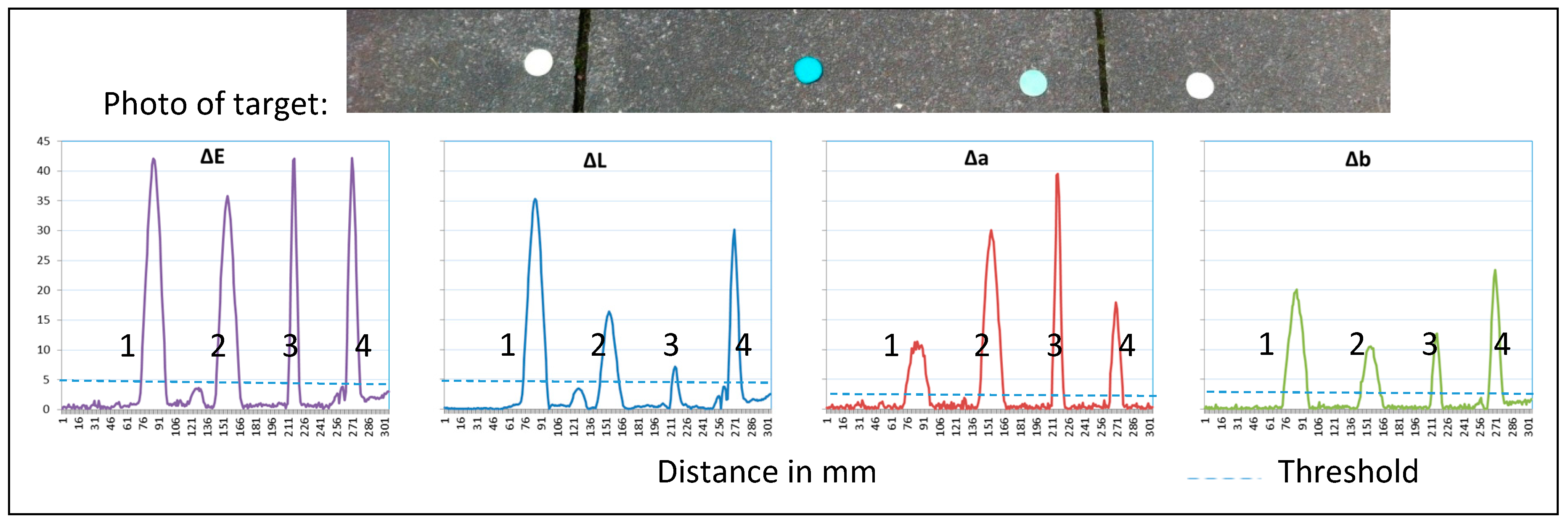
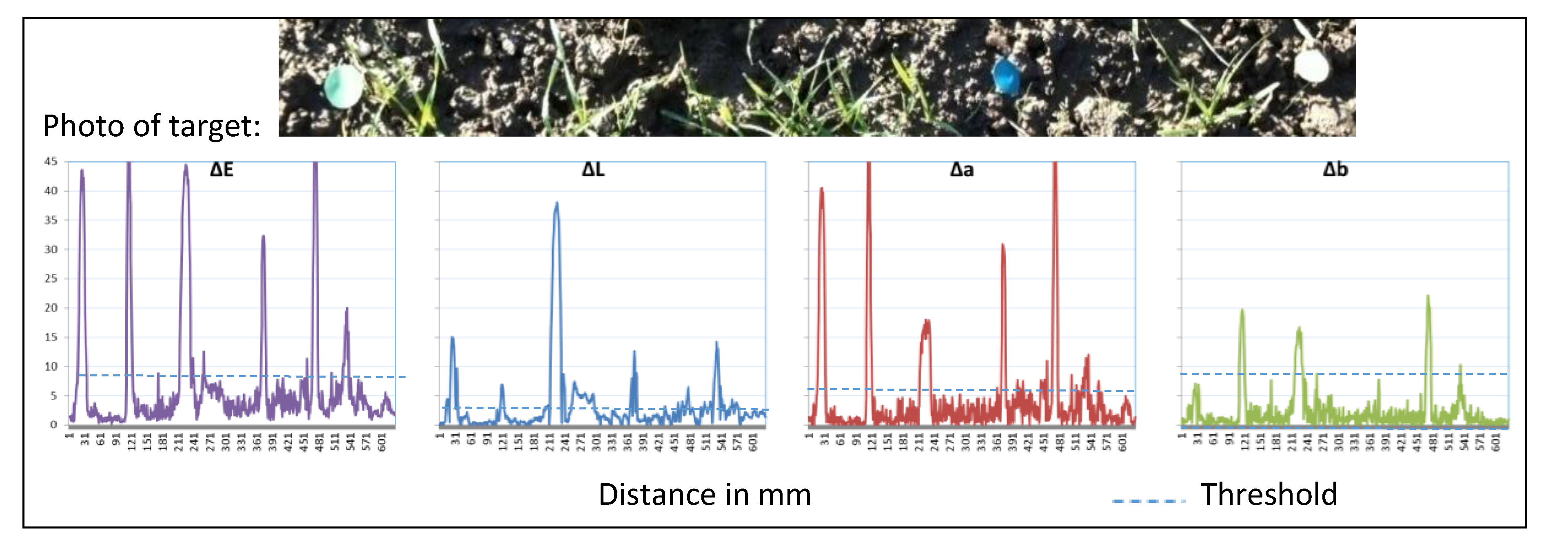
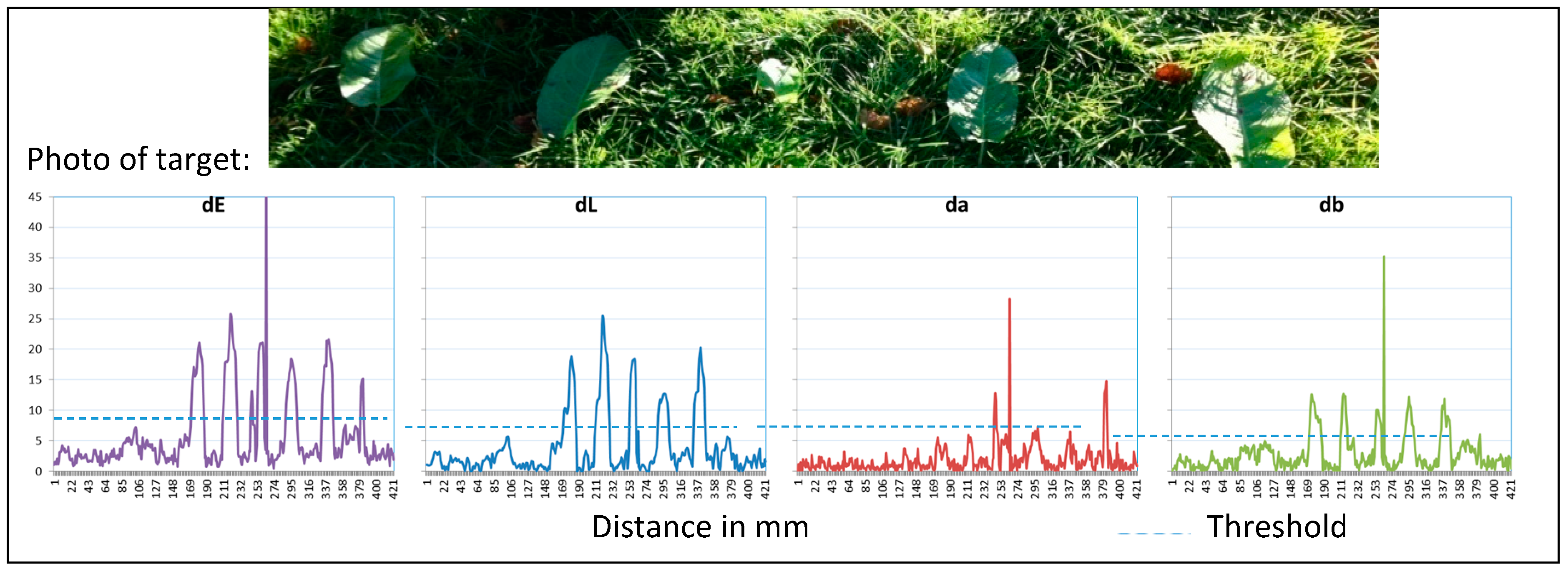
- The detection based on color similarity ΔE,
- The splitting color similarity into ΔL, Δa and Δb,
- A Virtual Channel d and
- A modeling algorithm based on statistics.
- -
- Due to the built-in single sensor controller, actuators can be addressed and activated in real time.
- -
- A specified evaluation algorithm for plant identification, the decision model and the current calibration values have to be updated to a central computer.
- -
- Minimal differences in coloration (a- and b-channel) and reflectivity can be detected with the sensor. Coloration properties are applicable for plant identification.
- -
- The differentiation of plants in crop and weed appears to be possible by a multistage model. The procedure is as follows:
- Extraction of suspicious points by the consideration of ∆E.
- Targeted analysis of these signals by the use of the individual Channels L, a and b and
- Comparison of all four channels (including Virtual Channel d) relative to each other to decrease the influence of the object size.
- -
- The relative weed/plant coverage of the measuring spot was calculated by a mathematical model. By choosing a decision model previously, the detection quality can be increased. Depending on the background characteristics, different models are more suitable.
- -
- Plants with a size of 1–5% of the measuring spot can be recognized. Weeds in the two-leaf stage can be identified.
- -
- The detection success of the recognition system is displayed and described in field tests. Field trials on municipal areas (with models of plants), winter wheat fields (with models of plants) and grassland (with dock) are shown. In the experiment variants, objects and weeds can be recognized.
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
References
- Bundesministerium für Ernährung und Landwirtschaft. Nationaler Aktionsplan zur Nachhaltigen Anwendung von Pflanzen-Schutzmitteln. Federal Ministry for Consumer Protection, Food and Agriculture of Germany, 2013. Available online: http://www.bmel.de/SharedDocs/Downloads/Broschueren/Nationaler AktionsplanPflanzenschutz.pdf?__blob=publicationFile (accessed on 5 May 2017).
- International Institute for Sustainable Development. FAO, WHO Join Forces to Reduce Risks Posed by Pesticides. 2017. Available online: http://sdg.iisd.org/news/fao-who-join-forces-to-reduce-risks-posed-by-pesticides/ (accessed on 18 June 2017).
- Schmittmann, O.; Kam, H.; Schulze Lammers, P. Position steered sowing of sugar beet Technology and precision. In Proceedings of the 2nd International Conference on Machine Control & Guidance—MCG, Bonn, Germany, 9–11 March 2010. [Google Scholar]
- Hloben, P. Study on the Response Time of Direct Injection Systems for Variable Rate Application of Herbicides (VDI-MEG Schriftenreihe 459). Ph.D. Thesis, University of Bonn, Bonn, Germany, 2007. [Google Scholar]
- Vondricka, J. Study on the Process of Direct Nozzle Injection for Real-Time Site Specific Pesticide Application (VDI-MEG Schriftenreihe 465). Ph.D. Thesis, University of Bonn, Bonn, Germany, 2008. [Google Scholar]
- Walgenbach, M. Aufbau und Untersuchung Eines Versuchsträgers zur Direktein-Speisung an der Düse (VDI-MEG Schriftenreihe 533). Ph.D. Thesis, University of Bonn, Bonn, Germany, 2014. [Google Scholar]
- Vondricka, J.; Schulze Lammers, P. Evaluation of a carrier control valve for a direct nozzle injection system. Biosyst. Eng. 2009, 103, 43–46. [Google Scholar] [CrossRef]
- Rockwell, A.D.; Ayers, P.D. A variable rate, direct nozzle injection field sprayer. Appl. Eng. Agric. 1996, 12, 531–538. [Google Scholar] [CrossRef]
- Paice, M.E.R.; Miller, P.C.H.; Bodle, J.D. An experimental sprayer for the spatially selective application of herbicides. J. Agric. Eng. Res. 1995, 60, 107–116. [Google Scholar] [CrossRef]
- Downey, D.; Crowe, T.G.; Giles, D.K.; Slaughter, D.C. Direct Nozzle Injection of Pesticide Concentrate into Continuous Flow for Intermittent Spray Applications. Trans. ASABE 2006, 49, 865–873. [Google Scholar] [CrossRef]
- Cordeau, S.; Triolet, M.; Wayman, S.; Steinberg, C.; Guillemin, J.-P. Bioherbicides. Dead in the water? A review of the existing products for integrated weed management. Crop Prot. 2016, 87, 44–49. [Google Scholar] [CrossRef]
- Kempenaar, C.; Groeneveld, R.M.W.; Uffing, A.J.M. Evaluation of Weed IT Model 2006 MKII. Spray Volume and Dose Response Tests; Plant Research International Wageningen UR: Wageningen, The Netherlands, 2006. [Google Scholar]
- Knittel, G.; Stahli, W. Spritz- und Sprühverfahren in Pflanzenschutz und Flüssigdüngung bei Flächenkulturen; Books on Demand: Berlin, Germany, 2001. [Google Scholar]
- Biller, R. Optoelektronik zur Unkrauterkennung—Erste Erfahrungen beim Test unter simulierten Bedingungen und beim Einsatz auf Versuchsflächen Innovative Verfahren zur Unkrauterkennung. KTBL Arb. 1996, 236, 75–85. [Google Scholar]
- Gibson, P.; Power, C. Introductory Remote Sensing: Digital Image Processing and Applications; Routledge: London, UK, 2000. [Google Scholar]
- Trimble. 2017. Available online: http://www.trimble.com/agriculture/weedseeker.aspx (accessed on 24 April 2017).
- Vrindts, E.; de Baerdemaeker, J. Optical discrimination of crop, weed and soil for on-line weed detection. In Proceedings of the First European Conference on Precision Agriculture, Warwick University Conference Centre, Coventry, UK, 7–10 September 1997. [Google Scholar]
- Wartenberg, G.; Langner, H.-R.; Böttger, H.; Schmidt, H.; Ruckelshausen, A. Messsystem zur Bewertung des Unkrautvorkommens; Bornimer Agrartechnische Berichte: Potsdam, Germany, 2005. [Google Scholar]
- Hanks, J.E.; Beck, J.L. Sensor-controlled hooded sprayer for row crops. Weed Technol. 1998, 12, 308–314. [Google Scholar]
- WeedIT. 2017. Available online: www.weedit.com.au (accessed on 24 April 2017).
- Visser, R.; Timmermans, A.J.M. Weed-It: A new selective weed control system. In Proceedings of the SPIE 2907, Optics in Agriculture, Forestry, and Biological Processing II. 120, Boston, MA, USA, 18 November 1996. [Google Scholar]
- Holland Scientific. Crop-Cycle ACS 470 Manual. 2014. Available online: http://hollandscientific.com/wp-content/uploads/files/ACS430_Manual.pdf (accessed on 15 December 2014).
- Köller, K.H. Landtechnische Innovationen auf der Agritechnica 2015. Available online: http://www.dlg.org/aktuell_landwirtschaft.html?detail/2015dlg/1/1/7922 (accessed on 18 December 2015).
- Department of Agriculture and Rural Development, Alberta, Canada, 2013. The Detectspray Spraying System. Available online: http://www1.agric.gov.ab.ca/$department/deptdocs.nsf/all/eng7995 (accessed on 24 February 2015).
- Kluge, A. Methoden zur Automatischen Unkrauterkennung für die Prozesssteuerung von Herbizidmaßnahmen. Ph.D. Thesis, University of Stuttgart, Stuttgart, Germany, 2011. [Google Scholar]
- Feyaert, F.; Pollet, P.; van Gool, L.; Wambact, P. Vision system for weed detection using hyper-spectral imaging, structural field information and unsupervised training sample collection. In Proceedings of the British Crop Protection Conference, Brighton, UK, 15–18 November 1999; pp. 607–614. [Google Scholar]
- Choi, K.H.; Han, A.H.; Han, S.H.; Park, K.-H.; Kim, K.S.; Kim, S. Morphology-based guidance line extraction for an autonomous weeding robot in paddy fields. Comput. Electron. Agric. 2015, 113, 266–274. [Google Scholar] [CrossRef]
- Brivot, R.; Marchant, J.A. Segmentation of plants and weeds for a precision crop protection robot using infrared images. IEE Proc.-Vis. Image Signal Process. 1996, 143, 118–124. [Google Scholar] [CrossRef]
- Dammer, K.-H.; Kim, D.-S. Real-time variable-rate herbicide application for weed control in carrots. Weed Res. 2016, 56, 237–246. [Google Scholar] [CrossRef]
- Gerhards, R.; Christensen, S. Real-time weed detection, decision making and patch spraying in maize, sugarbeet, winter wheat and winter barley. Weed Res. 2003, 43, 385–392. [Google Scholar] [CrossRef]
- Gerhards, R.; Oebel, H. Practical experiences with a system for site-specific weed control in arable crops using real-time image analysis and GPS-controlled patch spraying. Weed Res. 2006, 46, 185–193. [Google Scholar] [CrossRef]
- Laursen, M.S.; Jørgensen, R.N.; Midtiby, H.S.; Jensen, K.; Christiansen, M.P.; Giselsson, T.M.; Mortensen, A.K.; Jensen, P.K. Dicotyledon Weed Quantification Algorithm for Selective Herbicide Application in Maize Crops. Sensors 2016, 16, 1848. [Google Scholar] [CrossRef] [PubMed]
- Sökefeld, M.; Gerhards, R.; Oebel, H.; Therburg, R.-D. Image acquisition for weed detection and identification by digital image analysis. In Precision Agriculture ‘07; Stafford, J.V., Ed.; Academic Publishers: Wageningen, The Netherlands, 2007; pp. 523–528. [Google Scholar]
- Sökefeld, M.; Gerhards, R.; Kühbauch, W. Teilschlagspezifische Unkrautkontrolle—Von der Unkrauterfassung bis zur Herbizidapplikation. J. Plant Dis. Prot. 2000, 17, 227–233. [Google Scholar]
- Klose, R.; Penlington, J.; Ruckelshausen, A. Usability study of 3D Time-of-Flight cameras for automatic plant phenotyping. In Proceedings of the 1st International Workshop on Computer Image Analysis in Agriculture, Potsdam, Germany, 27–28 August 2009. [Google Scholar]
- Fender, F.; Hanneken, M.; Linz, A.; Ruckelshausen, A.; Spicer, M. Messende Lichtgitter und Multispektralkameras als bildgebende Systeme zur Pflanzenerkennung. Bornimer Agrartech. Ber. 2005, 40, 7–16. [Google Scholar]
- Lee, W.S.; Alchanatis, V.; Yang, C.; Hirafuji, M.; Moshou, D.; Li, C. Sensing technologies for precision specialty crop production. Comput. Electron. Agric. 2010, 74, 2–33. [Google Scholar] [CrossRef]
- Schmittmann, O. Teilflächenspezifische Ertragsmessung von Zuckerrüben in Echtzeit unter besonderer Berücksichtigung der Einzelrübenmasse (VDI-MEG Schriftenreihe 401). Ph.D. Thesis, University of Bonn, Bonn, Germany, 2002. [Google Scholar]
- Jensen, K.; Nimz, T. Welche Genauigkeit Erreicht Man Mit Farbsensoren und Mini-Spektrometern? (2015). Available online: http://www.mazet.de/de/downloads/produkt-kunden informationen/white-paper/item/download/39_9302d1d2d74f08ece546cc7c63cf0386.html (accessed on 24 April 2017).
- Mazet. 2017. Available online: www.mazet.de (accessed on 24 April 2017).
- ISO 12647. Graphic Technology—Process Control for the Production of Half-Tone Colour Separations, Proof and Production Prints; International Organization for Standardization: Geneva, Switzerland, 2013.
- ISO 13655. Graphic Technology—Spectral Measurement and Colorimetric Computation for Graphic Arts Images; International Organization for Standardization: Geneva, Switzerland, 2009.
- EN ISO 11664-4, 1976. Colorimetry—Part 4: CIE 1976 L*a*b* Colour Space. Available online: https://de.wikipedia.org/wiki/Delta_E (accessed on 17 July 2017).
- Meier, U.; Bleiholder, H.; Buhr, L.; Feller, C.; Hack, H.; Heß, M.; Lancashire, P.D.; Schnock, U.; Stau, R.; van den Boom, T.; et al. The BBCH system to coding the phenological growth stages of plants—History and publications. J. Kulturpflanzen 2009, 61, 41–52. [Google Scholar]
- Van Evert, F.K.; Samsom, J.; Polder, G.; Vijn, M.; van Dooren, H.-J.; Lamaker, A. A robot to detect and control broad-leaved dock (Rumex obtusifolius L.) in grassland. J. Field Robot. 2011, 28, 264–277. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ∆E | Evaluation Categories |
|---|---|
| 0.0...0.5 | no to almost no difference |
| 0.5...1.0 | difference may be noticeable to the trained eye |
| 1.0...2.0 | weak perceptible color difference |
| 2.0...4.0 | perceived color difference |
| 4.0...5.0 | substantial difference in color, which is rarely tolerated |
| above 5.0 | high difference defined as a different color |
| L | a | b | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ø | σ | Ø − σ | Ø + σ | Ø | σ | Ø − σ | Ø + σ | Ø | σ | Ø − σ | Ø + σ | |
| Anthropogenic Backgrounds | ||||||||||||
| Grey paving stones | 18.69 | 0.62 | 18.07 | 19.31 | 2.80 | 1.00 | 1.80 | 3.80 | 20.81 | 0.54 | 20.27 | 21.35 |
| Asphalt | 12.91 | 0.34 | 12.57 | 13.25 | 2.16 | 1.71 | 0.45 | 3.87 | 13.53 | 1.12 | 12.41 | 14.65 |
| Gravel | 7.44 | 1.05 | 6.39 | 8.49 | 3.15 | 1.00 | 2.15 | 4.15 | 12.24 | 1.46 | 10.78 | 13.70 |
| Stone steps | 13.55 | 0.50 | 14.05 | 14.05 | 2.34 | 0.52 | 1.82 | 2.86 | 15.44 | 0.76 | 14.68 | 16.20 |
| Fine chippings | 15.55 | 0.55 | 15.00 | 16.10 | 3.90 | 0.50 | 3.40 | 4.40 | 18.52 | 0.84 | 17.68 | 19.36 |
| Red paving stones | 15.28 | 1.28 | 14.00 | 16.56 | 13.61 | 2.89 | 10.72 | 16.50 | 24.12 | 0.91 | 23.21 | 25.03 |
| Sandy path | 11.45 | 0.41 | 11.04 | 11.86 | 4.90 | 1.62 | 3.28 | 6.52 | 19.72 | 1.18 | 18.54 | 20.90 |
| Natural Backgrounds | ||||||||||||
| Arable land | 11.32 | 0.13 | 11.19 | 11.45 | 4.81 | 0.70 | 4.11 | 5.51 | 20.10 | 0.47 | 19.93 | 20.57 |
| Grassland | 10.35 | 0.96 | 9.39 | 11.31 | −2.37 | 2.40 | −4.77 | 0.03 | 22.74 | 2.06 | 20.68 | 24.80 |
| Grassland with dew | 9.80 | 2.23 | 7.57 | 12.03 | −6.32 | 2.54 | −8.86 | −3.78 | 19.47 | 3.32 | 16.15 | 22.79 |
| Green 1 | Green 2 | Green 3 | Green 4 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
 |  |  |  | |||||||||
| L | a | b | L | a | b | L | a | b | L | a | b | |
| Median | 44.78 | −15.21 | 44.47 | 40.45 | −26.27 | 51.75 | 33.95 | −49.86 | 33.39 | 29.16 | −61.65 | −4.33 |
| Mean | 44.80 | −15.24 | 44.39 | 40.45 | −26.18 | 51.80 | 33.95 | −49.95 | 33.54 | 29.15 | −61.51 | −4.22 |
| Minimum | 44.71 | −14.85 | 43.79 | 40.39 | −16.83 | 50.82 | 32.95 | −49.61 | 32.95 | 28.98 | −63.01 | −3.25 |
| Maximum | 44.84 | −15.73 | 44.69 | 40.55 | −25.60 | 52.91 | 34.47 | −50.53 | 34.47 | 29.32 | −60.35 | −4.96 |
| Green 1 | Green 2 | Green 3 | Green 4 | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| L | a | b | d | L | a | b | d | L | a | b | d | L | a | b | d | |
| Gray pavings | 2.5 | 7.1 | 3.5 | 3.0 | 3.6 | 7.7 | 8.5 | 7.1 | 5.9 | 3.6 | 16.4 | 5.2 | 9.2 | 5.7 | 6.8 | 12.2 |
| Asphalt cover | 1.2 | 11.5 | 4.6 | 4.4 | 1.8 | 10.3 | 8.4 | 7.7 | 2.9 | 5.0 | 13.3 | 5.9 | 4.2 | 6.8 | 12.8 | 12.3 |
| Gravel | 2.9 | 7.0 | 5.4 | 3.5 | 3.7 | 7.6 | 9.0 | 6.9 | 5.0 | 3.6 | 14.1 | 5.3 | 6.4 | 5.6 | 15.9 | 11.0 |
| Flagged floor | 1.8 | 4.6 | 3.6 | 3.4 | 2.5 | 6.1 | 7.8 | 7.1 | 3.8 | 2.8 | 12.7 | 5.3 | 5.4 | 5.0 | 9.8 | 11.6 |
| Concrete | 2.1 | 4.1 | 4.3 | 2.5 | 2.9 | 5.7 | 8.8 | 6.6 | 4.5 | 2.6 | 15.9 | 4.8 | 6.5 | 4.8 | 8.8 | 10.9 |
| Red pavings | 4.5 | 18.0 | 5.9 | 5.6 | 5.7 | 15.4 | 10.9 | 8.6 | 8.4 | 9.2 | 26.2 | 6.7 | 11.7 | 10.0 | 7.3 | 13.4 |
| Sandy path | 1.4 | 9.5 | 5.9 | 4.9 | 2.0 | 9.1 | 10.2 | 8.2 | 3.1 | 4.6 | 19.8 | 6.3 | 4.2 | 6.4 | 9.8 | 13.5 |
| Field | 0.5 | 4.9 | 3.1 | 2.5 | 1.0 | 6.2 | 8.1 | 6.6 | 1.8 | 3.0 | 15.0 | 4.8 | 2.6 | 5.1 | 6.7 | 8.0 |
| Grassland | 2.9 | 21.0 | 10.8 | 8.8 | 3.7 | 15.2 | 14.3 | 11.5 | 5.3 | 7.0 | 33.6 | 8.9 | 6.9 | 8.5 | 11.9 | 20.4 |
| Grassland+dew | 6.5 | 31.8 | 14.4 | 15.2 | 7.8 | 18.9 | 16.8 | 15.6 | 10.4 | 7.9 | 34.8 | 12.7 | 13.3 | 9.4 | 18.8 | 25.2 |
| Spot diameter 5 cm (~20 cm2) | ...10 cm (~80 cm2) | |||||||||||||||
| 0–3.0 | less: | 0.6 | cm2 | less: | 2.4 | cm2 | plant shape size | |||||||||
| 3.1–5.0 | 1 | cm2 | 4 | cm2 | ||||||||||||
| 5.1–7.5 | 1.5 | cm2 | 6 | cm2 | ||||||||||||
| 7.6–10 | 2 | cm2 | 8 | cm2 | ||||||||||||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schmittmann, O.; Schulze Lammers, P. A True-Color Sensor and Suitable Evaluation Algorithm for Plant Recognition. Sensors 2017, 17, 1823. https://doi.org/10.3390/s17081823
Schmittmann O, Schulze Lammers P. A True-Color Sensor and Suitable Evaluation Algorithm for Plant Recognition. Sensors. 2017; 17(8):1823. https://doi.org/10.3390/s17081823
Chicago/Turabian StyleSchmittmann, Oliver, and Peter Schulze Lammers. 2017. "A True-Color Sensor and Suitable Evaluation Algorithm for Plant Recognition" Sensors 17, no. 8: 1823. https://doi.org/10.3390/s17081823
APA StyleSchmittmann, O., & Schulze Lammers, P. (2017). A True-Color Sensor and Suitable Evaluation Algorithm for Plant Recognition. Sensors, 17(8), 1823. https://doi.org/10.3390/s17081823