1. Introduction
With rapid advances of Information and Communication Technology (ICT), aerial robots, especially UAVs, have attracted the attention of both industry and academia. Because UAVs are flexible, portable, inexpensive, and convenient to use, they have been applied to perform various tasks in the domains of transportation, agriculture, healthcare, and heavy industry [
1,
2,
3,
4,
5,
6]. Certain characteristics such as being wireless, unmanned, and remotely-operable make them appropriate for use in domains which might be dangerous or difficult for humans. There have been several research studies for the application of UAVs for the protection of powers plants, inspection of electric power, disaster rescue, and recording aerial videos for the protection of the environment [
7,
8,
9,
10]. Traditionally, wireless sensor networks have been used and one drawback is lack of moving ability for fix-installed wireless nodes [
11,
12,
13]. Although many studies have introduced mobile robots to address the problem, the locomotive capacity of these ground robots can often be limited by the terrain or obstacles of monitoring sites [
14,
15]. Therefore, more studies are integrating UAVs or other aerial robots into WSNs. These systems are called UAV-WSNs and they are well suited for remote surveillance and emergency response [
16,
17,
18,
19,
20], especially for events such as landslides, wildfire, flood, etc. In these scenarios, real-time event surveillance is the basis of the right decision. Furthermore, to some extent, real-time event detection could save lives and cost.
However, UAV-based WSNs suffer from two major limitations: (a) due to the limited on-board computational capacity and storage, WSNs based on UAVs cannot perform global optimization algorithms for desired factors such as flying trajectory, and network topology control, (b) since WSNs and UAVs are powered by batteries [
21], energy consumption is a major constraint, (c) there is a limited consideration of events priority. Therefore, we leveraged the cloud computing infrastructures to store and manipulate a large amount of data so as to undertake computational optimization for the behaviors of a WSN and UAV. Next, we provided a novel technique to minimize the energy utilized by the WSNs and UAVs to improve the duration of the data collection.
The rest of the paper is organized as follows:
Section 2 discusses the related work on WSNs, data gathering using UAVs, current challenges and problems. In
Section 3, an efficient architecture for data aggregation using a UAV-based WSN is presented. The problem description, the mathematical model and the algorithm based on the emerging event and user interests are given in
Section 4. The goal in this section is to find the optimal flying parameters and the corresponding WSN nodes and clusters. In
Section 5 we discuss the simulation results by comparing our method with other approaches. Finally, we provide our conclusions and discuss possible future work in
Section 6.
2. Related Work and Contributions
UAVs have the ability to enhance the data collection system of WSNs with improved mobility, scalability, and flexibility. Therefore, in recent years, there has been a growing research interest in combining UAVs and WSNs for data gathering [
22,
23,
24]. The related literature on the topic can be divided into two groups: (a) cloud-WSN, (b) applications of UAV-based WSN and (c) optimization of the parameters. In this paper, we focus on each of these three aspects, and they are our motivation for this paper.
Cloud-WSN: With the era of big data coming, the traditional WSN has faced many challenges, such as data storage, computing, etc., because of WSN’s limit abilities of storing and computing. So, in [
25,
26,
27] and other works, researchers have begun to integrate WSN and Cloud for dealing with these new changes, and particularly the framework of sensor-cloud is proposed. In [
27], the authors proposed a Multi-Method Data Delivery (MMDD) scheme for sensor-cloud users. This strategy incorporates four kinds of data delivery. Furthermore, in [
28], to get good communication, the multiple mobile sinks (MSs) to help with WSN’S data collection are adopted in the literature, and a time adaptive schedule algorithm (TASA) for data collection via multiple MSs is designed, with several provable properties. In [
11], the authors proposed a sensing service framework for integrating Wireless Sensor Networks and cloud infrastructure to impart climate alerts and perform climate analysis at reduced cost. It is obvious that WSN-Cloud or Sensor-Cloud is an effective way of dealing with the big data challenges; however, there are few works that focus on the WSN cloud applications and multiple emerging events.
Application of UAV-WSN: WSNs have been widely applied for parameter sensing in different environments, especially for deploying emergency applications in harsh conditions. In agricultural applications, UAV-WSNs have been used for collecting ground sensor data, surveillance crops, spraying chemicals, etc. In [
16], the authors proposed a system for spraying chemicals on crops where the UAVs were responsible for spraying the chemicals, while the WSNs provided feedback and information from the ground. In [
17], a system was developed for real-time frost surveillance in vineyards. A dynamic mobile node was carried by an UAV to ensure communication between the sparse clusters located at fragmented parcels and a base station.
The flexibility of deploying UAVs have made them useful for surveillance special events. In [
18], a UAV-based WSN was applied to surveillance wildfire in forests, while in [
19], the authors, built a flight formation based on UAVs with WSNs and imaging systems. This system can fly over disaster areas such as wood fires or large traffic accidents. In these applications, for enhancing the scalability, and overcoming the drawback of the traditional WSN, UAVs play an essential role. They serve as the sink, sensing, relay nodes in the whole cloud-assisted UAV data collection system. However, these studies do not consider multiple events and the constrains of UAVs and hence lack the rigorous demands which practical applications would face.
Related optimizations: Several researchers have studied the related optimizations of UAV-WSNs. In [
29,
30,
31], to improve results, researchers experimented with optimization algorithms such particle swarm, ant colony, gradient descent to optimize the path planning of UAVs and WSNs. Other studies have focused on the communication protocol of the system. In [
32], a new protocol, consisting of the TDMA and PFS schemes, was proposed to improve the reliability of the communication of WSN-UAV systems. In [
23], the authors presented a data-centric routing protocol to support the establishment of a global gradient that only sends aggregated data from the center of the event to the data sink via multiple adjustable routes to increase the reliability. However, these works in the literature are normally based on quite specific assumptions, such as the fixed communication load, and the same priority of the sensing event. The current approaches have not considered the different parameters of WSNs, UAVs and other related constraints.
The contributions of this paper are listed as follows. We propose a cloud-assisted UAV data collection framework for distributed WSNs. The approach is based on the correlation between the area of emerging events and the WSN surveillance region. According to the event correlation matrix, the collected data clusters sequences are computed in the cloud and transmitted to the UAV. Meanwhile, based on global information including GPS position and data size of the ground WSNs, and the UAV basic parameters in terms of the flying height, position, and hovering time are calculated. The performance of our proposal is evaluated through simulation. To test our approach, we implemented a practical application in the real world.
3. Mathematical Model and Algorithm Analysis
In this section, to illustrate our approach to data collection using UAV, we present the outline of the algorithm and a mathematical model. We also provide the theoretical analysis of the algorithm.
3.1. Outline of Our Algorithm
In the paper, we focus on emerging events surveillance in ground WSN, and use the UAV to enhance the data collection scheme.
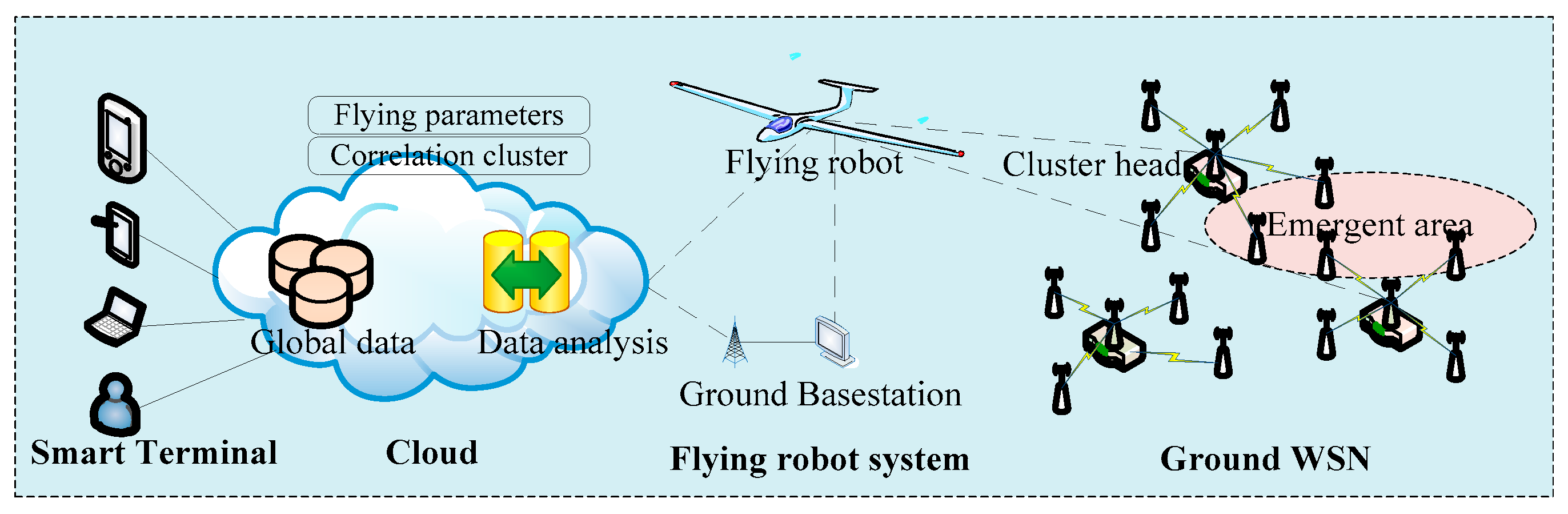
Figure 1 shows the schematic of the approach. The overall system includes a cloud computing platform, a UAV, sensor nodes and cluster heads. The process in our approach after the occurrence of specific events can be divided into two phases. The operation of the mechanism can be described by the following steps: cloud based mission planning and UAV data collection.
In the first step, if there are emerging events in the monitored area, the related and simple information is sent to the base station. Next, the cloud computing platform identifies the event-related clusters based on the position of the WSN clusters and the coverage of events. Meanwhile, the algorithm in the cloud is used to optimize the visiting sequence of clusters in the WSN. Then, the flight mission is scheduled to the UAV.
In the second phase, to save energy and shorten the flying time, optimal parameters for dynamic flying must be decided in advance. In this phase, issues such as rate of packet loss and data acquisition integrity of the wireless communication channel are addressed at the same time.
3.2. Mathematical Definitions
To better illustrate the problem and describe the algorithm, we consider the characteristics of the WSN and the UAV along with actual applications. For this, we provide the following definitions and the assumptions made in the system:
- (1)
There are a limited number of ground WSN nodes in the clusters, and the network does not contain any mobile node.
- (2)
Within each cluster, there is only one cluster head. This node always has more energy than ordinary nodes.
- (3)
Each node has its own unique identification code and GPS position.
- (4)
The whole wireless network operates on a single fixed radio channel.
- (5)
The UAV cruises at the same speed during the entire process of data collection.
We consider that there are n clusters in the ground WSN. They are denoted by the set
CN = {
c1,
c2, …,
ci, …,
cn}. Each cluster
ci has
ni sensor nodes, and each node
i has the position
Ps (
xi,
yi). Furthermore, we assume that there are
m emerging events, denoted by the set
UM = {
u1,
u2, …,
uj, …,
um}. Every event
uj has an event radius of
Ru with central coordinates
Pu (
xj,
yj) and an event priority, denoted by
Wu = {
w1,
w2, …,
wj, …,
wm}. Based on the above assumptions, we have the following definitions:
Definition 1. Event correlation coefficient: Let be the total number of nodes in cluster a; and be the number of nodes correlated with the event j. The event correlation coefficient of the cluster a, given by is the ratio of the correlated and the total number of nodes in cluster a. This is given by Equation (1): The correlation between the nodes and events is the foundation of our proposal. Let
denote the correlation between a node
Si and an event
Uj. Let the sensing and event radii be
Rs and
Ru. Let
D (
Si,
Uj) be the distance from the node
Si and the center of the event
Uj.
can have one of the two values: 1 or 0, which indicates whether
Si and
Uj are correlated or uncorrelated, respectively. Therefore the
of the node and the event is:
We can derive the cluster correlation coefficient
between the cluster
Ci and event
Uj, as:
Hence, we obtain the correlation matrix
between
Ci and
UM, where the rows and columns are the clusters and events, respectively. The
is mathematically written as follows:
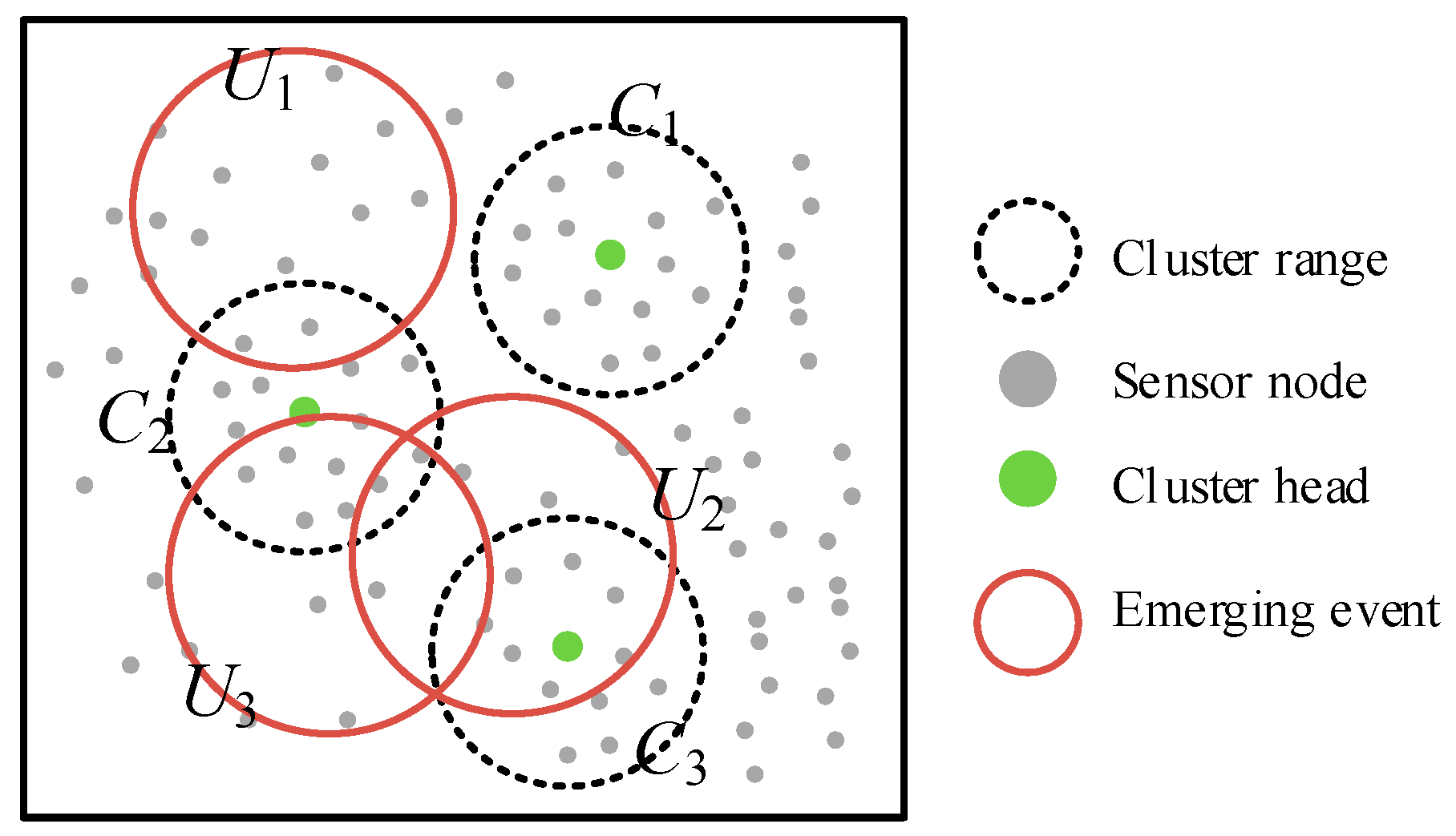
To better understand the essence of the event correlation coefficient matrix, let us consider an example shown in
Figure 2 where the surveillance network consists of three sensor clusters (
C1,
C2,
C3) and three events (
U1,
U2,
U3) are trigging the alarm. We find that two sensors in cluster
C2 could sense the event
U1, so the cluster correlation coefficient for
C2 and
U1 . In the same way, the cluster correlation coefficient
, as in cluster
C1 no sensor could detect the event
U1. So, the overall correlation matrix
.
Let Sc(f) and Sr(f), be sums of the fth column and row respectively. From this, we can obtain the following Lemmas.
Lemma 1. Given multiple events occurring in a cluster i, we have Sr(i) >1.
Proof. For any cluster i which senses the event j, we have a cluster coefficient . We assume that there are L = {1, 2, …, l} events occurring in the cluster i. Namely, . We can obtain the sum of the cluster correlation as . Since , we get that the value of .
Definition 2. Integrity of data acquisition: Let and be the number of received and total messages, respectively, of the event j in the cluster a. ∂a (j) is the ratio of and , namely:So, the data acquisition integrity () of the event of j in WSN is given by: Definition 3. Total Flying Score: Let Fs be the total flying score. Df is the total distance flown by the aerial vehicle to gather data for an event. So, at a given moment (t), Fs is the sum of the results of multiplied by the event priority and divided by the total flying distance. Fs can be written as: 3.3. Acquisition Sequence Design
For an event-driven UAV and WSN, every flight to collect cluster data must consider the flying distance, correlation and the event priority. In other words, we should strike a balance between these factors. The goal of this work is to maximize
Fs of the WSN and can be formulated as:
We formulate the problem of UAV collecting data from WSN for emerging events as a maximization problem. In this optimization process, the event correlation matrix plays a critical role. We divide the proposal into two stages. First, according to the distance, we obtain the hierarchal relation between the node and the cluster. Next, based on the total flying score, we select the correlation clusters for the UAV. A step-wise greedy strategy is used to deal with the problem. Algorithm 1 describes the rules for designing the path of an UAV for collecting a sequence of clusters from multiple emerging events. Algorithm 1 works as follows: Initially, CN, Um, Wu, RS and Ru are empty. Then, parameters values are inserted according to the sensors, clusters and the emerging events. It iteratively computes the node event correlation and cluster event correlation using Equations (1)–(3) (see Steps 1–11). Then, from the Steps 13–18, the Total Flying Score Fs for different solutions are found according the Equations (4)–(7). Finally, the value of Fs is ordered from Max to Min.
| Algorithm 1. Based on the correlation of the flying sequence for multiple emerging events. |
| Input: Cluster contains the Sensor CN, the emerging event UM, and the event priority Wu, Rs, Ru. |
| Output: Set of ordering correlation clusters G = {g1, g2, g3, …, gk}. |
| 1: | Begin |
| 2: | for j ← 1 to m do |
| 3: | for i ← 1 to n do |
| 4: | for S ← 1 to Ci do r |
| 5: | if D(s, i, j ) < Rs + Ru |
| 6: | = 1, = 1 |
| 7: | |
| 8: | end if |
| 9: | end for |
| 10: | end for |
| 11: | end for |
| 12: | for i ← 1 to n do |
| 13: | if > 1 |
| 14: | |
| 15: | end if |
| 16: | end for |
| 17: | compute Fs using Equation (7). |
| 18: | Ordering the Fs from max to min |
| 19: | end |
3.4. Parameter Design for the UAV
In
Section 3.3, we focused on the problem of searching the correlation cluster for emerging events from the ground WSN. In this section, we deal with the parameter optimization of the UAV while considering the characters of ground WSN. This approach can be divided into the following steps: (1) the UAV obtains the correlation of the sequence of flying over the WSN clusters according to Algorithm 1. Then the UAV flies over the clusters and establishes wireless links; (2) the size of the cluster data stored by cluster head is first obtained, and the UAV computes the length of time to hover; (3) in the third step, the UAV and WSN clusters finish the data communication.
Meanwhile, for the UAV, we use
Vf to indicate the velocity of flying and
H to indicate the height of flying. The set
G = {
g1,
g2,
g3, …,
gk} indicates the ordering of the correlation clusters. The corresponding data set of the sizes of the cluster is given by
D = {
d1,
d2,
d3, …,
dk}. Then,
Ts = {
t1,
t2, …,
tk} denotes the set of stay times over the WSN cluster. It is easy to obtain the flying time
T, using the following calculations:
where,
Tf is flying time in seconds of the UAV and
Vn is the wireless transmission speed. We assume that the size of the data of every correlated node is a constant
Dc. From this, Equation (9), can be approximated as:
Furthermore, we can derive the following properties: (1) the number of correlation clusters K is given by 0 < k <= n; (2) the stay time of the UAV over the cluster is inversely proportional to its event correlation coefficient. The details of the approach are given in Algorithm 2 which describes the rules for obtaining the dynamic flying parameters of the UAV in the presence of an emerging event. UAV flies over the WSN cluster according to the correlation clusters matrix G, and collect data wirelessly, as described in Steps 2–7. Meanwhile, from Steps 8–10, it uses the Equations (9) and (10) to compute the hovering time for UAV. Finally, UAV returns to its ground base station.
| Algorithm 2. Compute the dynamic flying parameters and parameters for data transmission. |
| Input: Set of correlation clusters G = {g1, g2, g3, …, gk}, Vn, Vf, DC. |
| Output: Set of stay times over the WSN cluster Ts = {t1, t2, …, tk}. |
| 1: | Begin |
| 2: | for i ← 1 to = k do |
| 3: | UAV flies over the WSN cluster gi |
| 4: | Create a wireless link with the cluster head of the cluster gi |
| 5: | Cluster head receives the correlation information from the sensor node |
| 6: | Send the di to UAV |
| 7: | UAV receives the di, D ← di |
| 8: | ti = di/Vn // Compute the stay over cluster time |
| 9: | Ts ← ti |
| 10: | Hover ti, and Begin communication |
| 11: | Finish data transmission |
| 12: | Fly to the next cluster |
| 13: | end for |
| 14: | Fly to the ground base station |
| 15: | end |
5. Real-World Use Case
In this section, a real-world use case is presented to further explain the benefits of our proposal in a light traffic UAV-WSN. For assessing the performance of CWC in real applications, we constructed the wireless network, UAV control system and carried out an experiment to compare our approach and other traditional schemes (FCM).
Figure 6 shows a prototype platform of UAV-WSN for detecting the multiple emerging events, and this platform includes a variety of physical equipment, such as a UAV-sink node, sensor nodes, group leaders, etc. System configuration parameters are as follows. The antenna height of sensor nodes is 0.5 m; the transmission power is 1 dBm; the communication rate was 250 kbps; the node omni-directional antenna gain is 3 dBi. The wireless sensors are powered by batteries and equipped with CC2530 along with GPS module to get the position. WSN uses ZigBee as the wireless communication protocol, with a radio frequency of 2.4 GHz. The cluster heads are charged with photovoltaic panels. The UAV (a quadrotor) is controlled by an MCU stm32f103.
As mentioned above, sensor nodes are randomly placed in the surveillance area. After obtaining the communication quality index and its coordinate, the ground WSN is established. An auxiliary computer is connected to the WSN base station. As shown in
Figure 6, the UAV followed this scheduled sequence of vesting and completes the WSN data collection accordingly. The
Figure 6b also compares the flying path generated using traditional means (FMC) and our approach.
It is obvious that the cluster 3 could sense two emerging events, and the value of event correlation coefficient of cluster 3 is greater than the other clusters. So, UAV firstly collected the data of this cluster. After three rounds of experiments, we got the average assessment metrics of different criteria. The lengths flying time of CWC and traditional strategies are 5 min and 12 min respectively. Meanwhile, the collected data integrity is 99% and 45%, which is more than two times higher. Therefore, we draw the conclusion with confidence that the data communication quality between WSN and UAV is improved while the flying time and energy consumption of the whole cooperative system is obviously reduced. We make the system more efficient in terms of energy consumption and task response.
6. Conclusions
In this paper, we focus on the challenge of data collection using UAVs, optimizing the flying parameters such as altitude, flying trajectory, and the hovering time over the WSN. Based on the conditions of the ground WSN, which includes the quality of communication, and the positions of the cluster heads, we provided the related mathematical model and analyzed the properties of our method. We presented a cloud-assisted algorithm for data gathering from an emerging event. Moreover, a simulation is setup, and our proposal is verified in a real-world surveillance application. The results demonstrate that our strategy can reduce the flying time, distance, energy consumption and the latency of data collection. From the analysis of the experimental results, we show that our proposal outperforms the conventional methods.
The main constraint of this work is that we only considered the task of gathering event data in UAVs and WSNs using a single drone. In the future, we may need to consider extending our study to co-operate UAVs for more efficient data acquisition in large-scale emerging scenarios.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}