An RFID Indoor Positioning Algorithm Based on Bayesian Probability and K-Nearest Neighbor



Abstract
1. Introduction
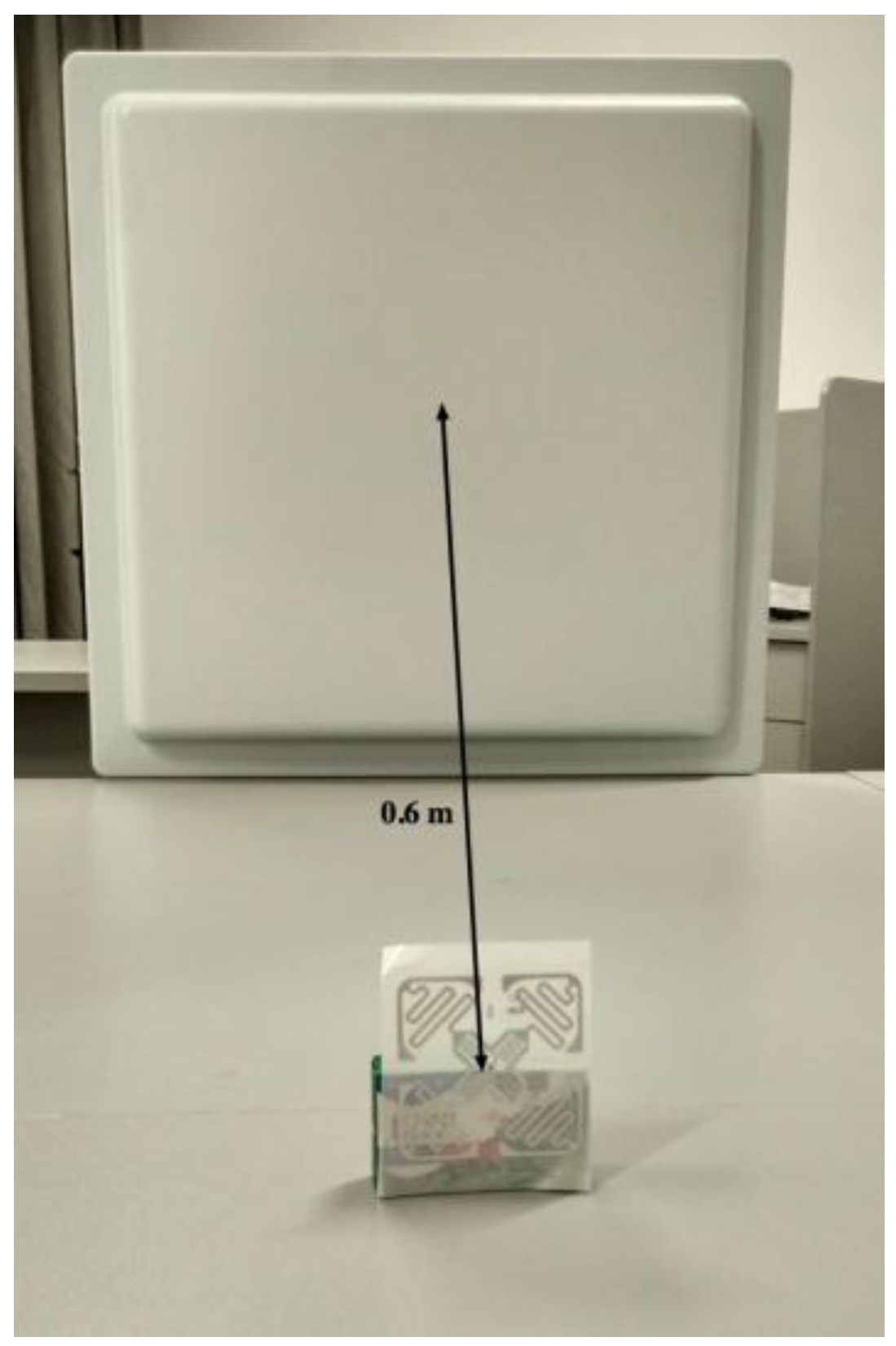
2. RFID Signal Characteristic
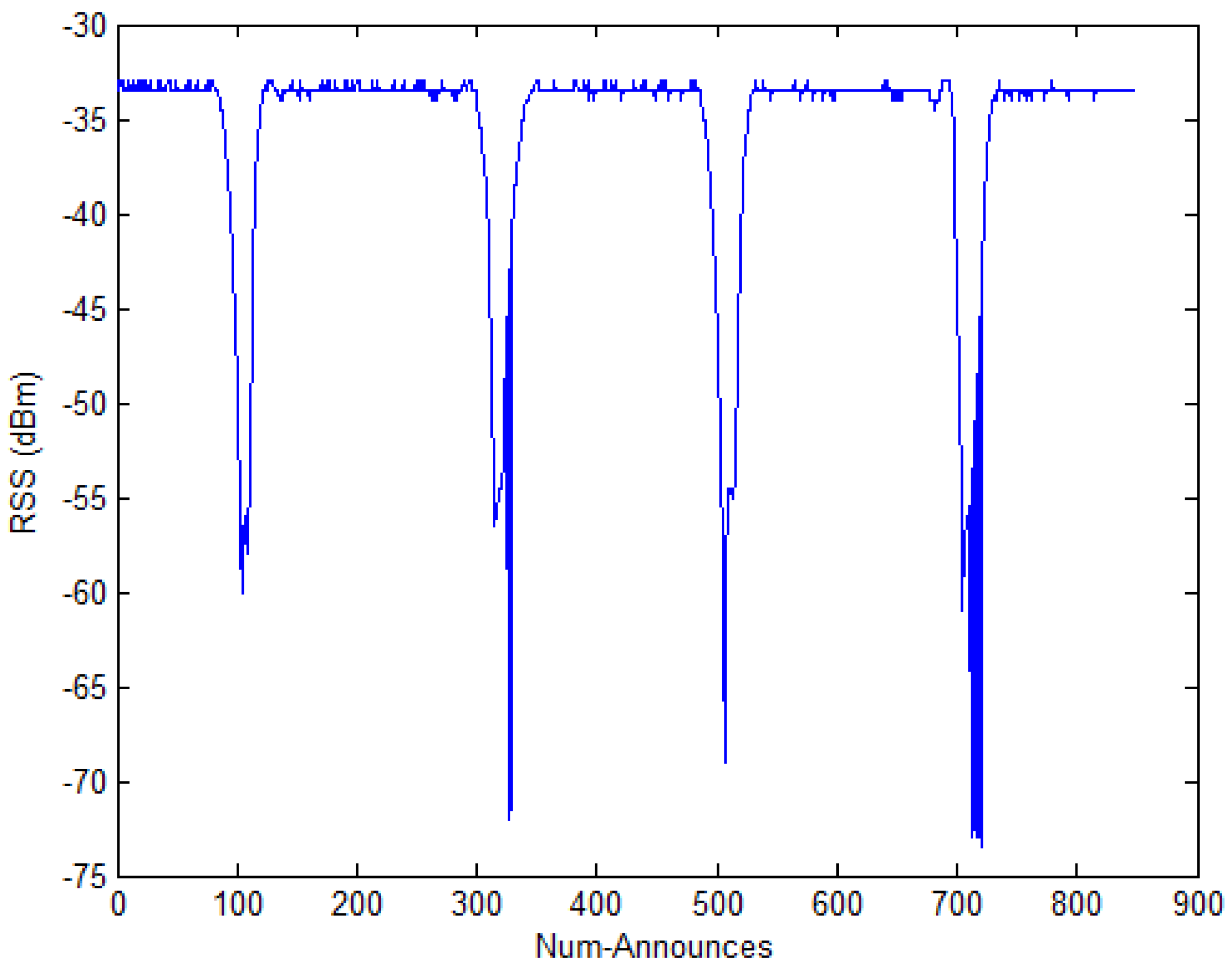
2.1. RSS
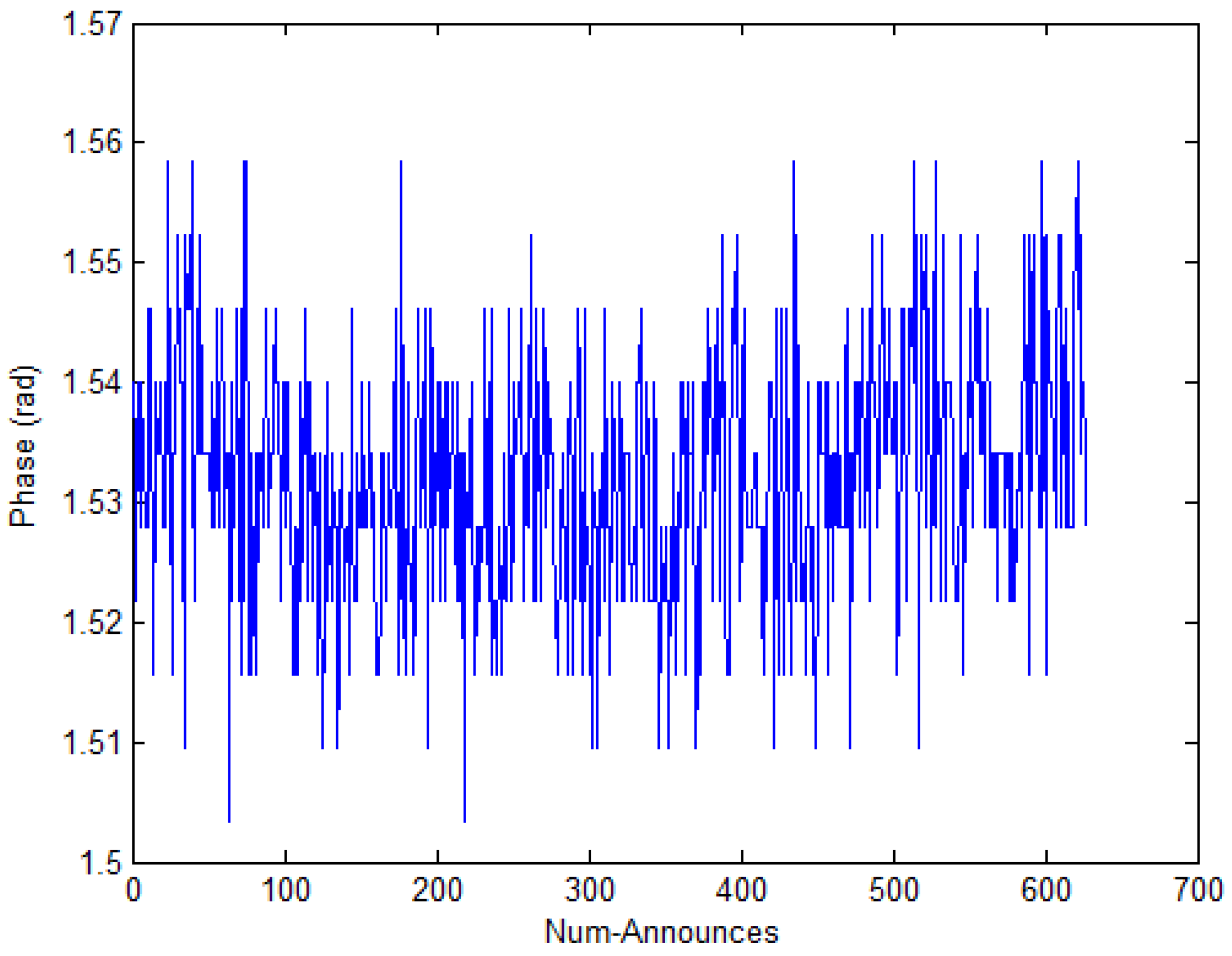
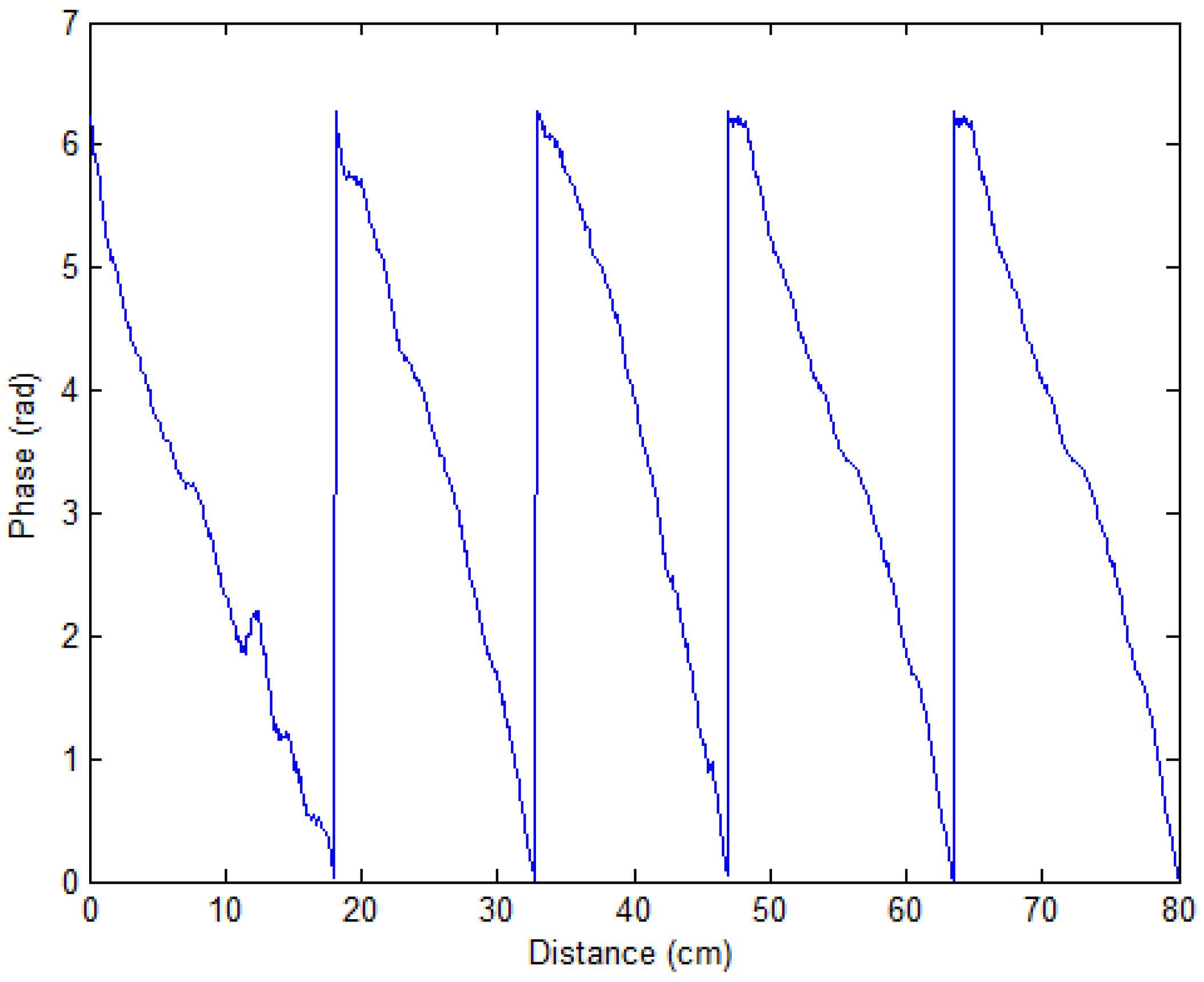
2.2. Phase
3. Bayes Theorem
- (1)
- Confirm the prior distribution of parameter .
- (2)
- Obtain the joint probability density distribution through joint probability density distribution .
- (3)
- Obtain the posterior probability of parameter .
- (4)
- Obtain the estimated value
4. Proposed Positioning Algorithm
- (1)
- Determine the prior probability: . Suppose , , we can obtain the following formula:where is the distance between and .
- (2)
- Determine the posteriori probability: , which is shown in the following formula.where is the probability of the unknown tag at position and the measured distance is , represents the distance between the unknown tag and the reader’s antenna, and represents the uncertainty variance of the measured distance. In our algorithm, four reference tags around the target tags’ position are selected, where these positions are , then we can get the value of .
- (3)
- Calculate the probability distribution function of the unknown tag’s position. According to Formulas (9)–(11), we can calculate the which represents the probability distribution function of the target tag’s location. We then get the following formula:where
5. Experiments and Results
5.1. Experimental Settings
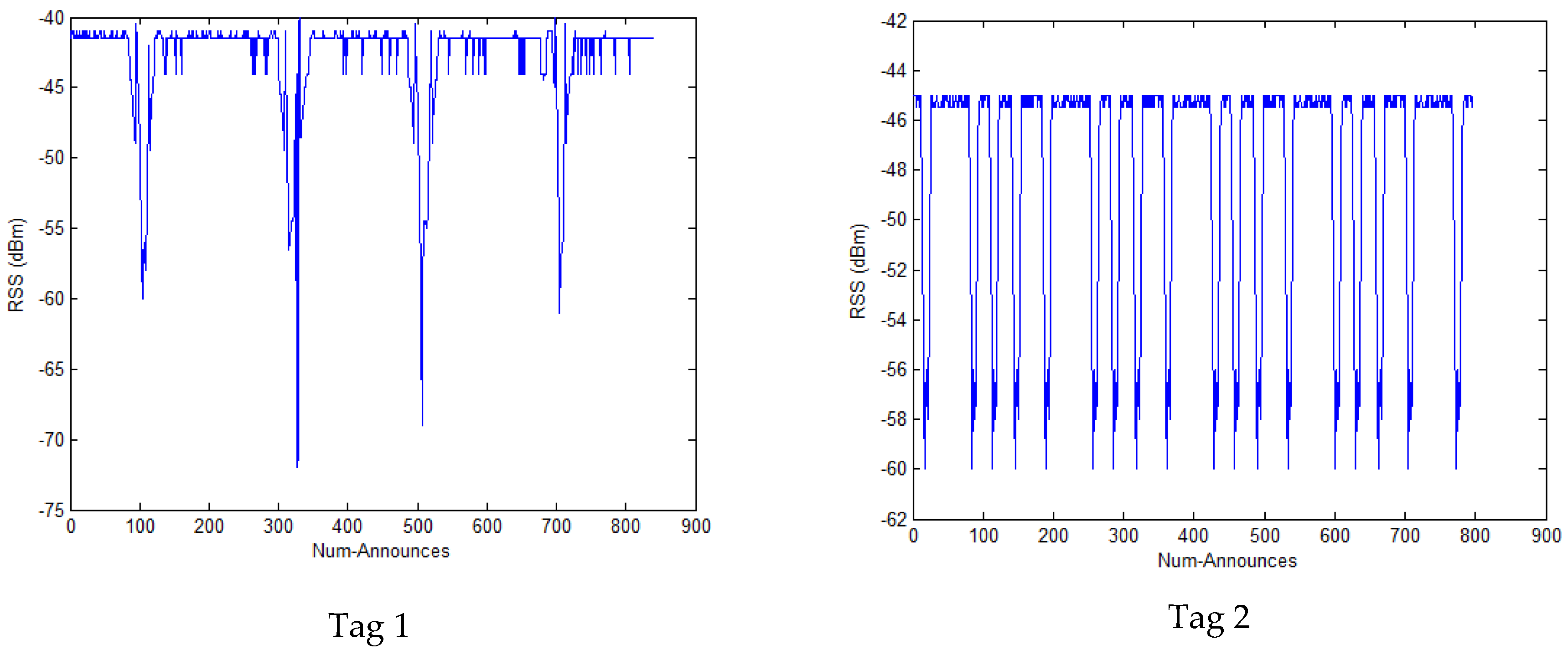
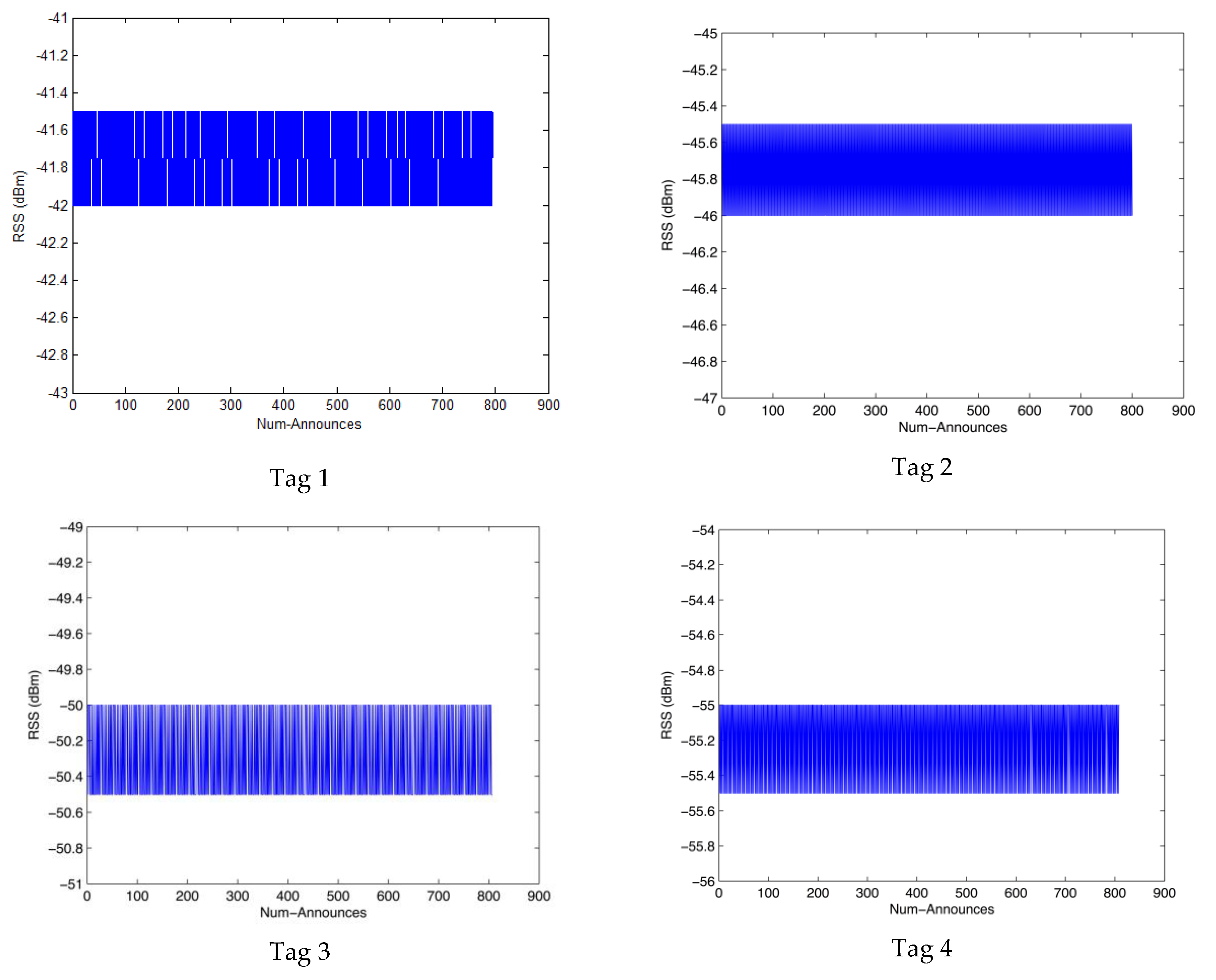
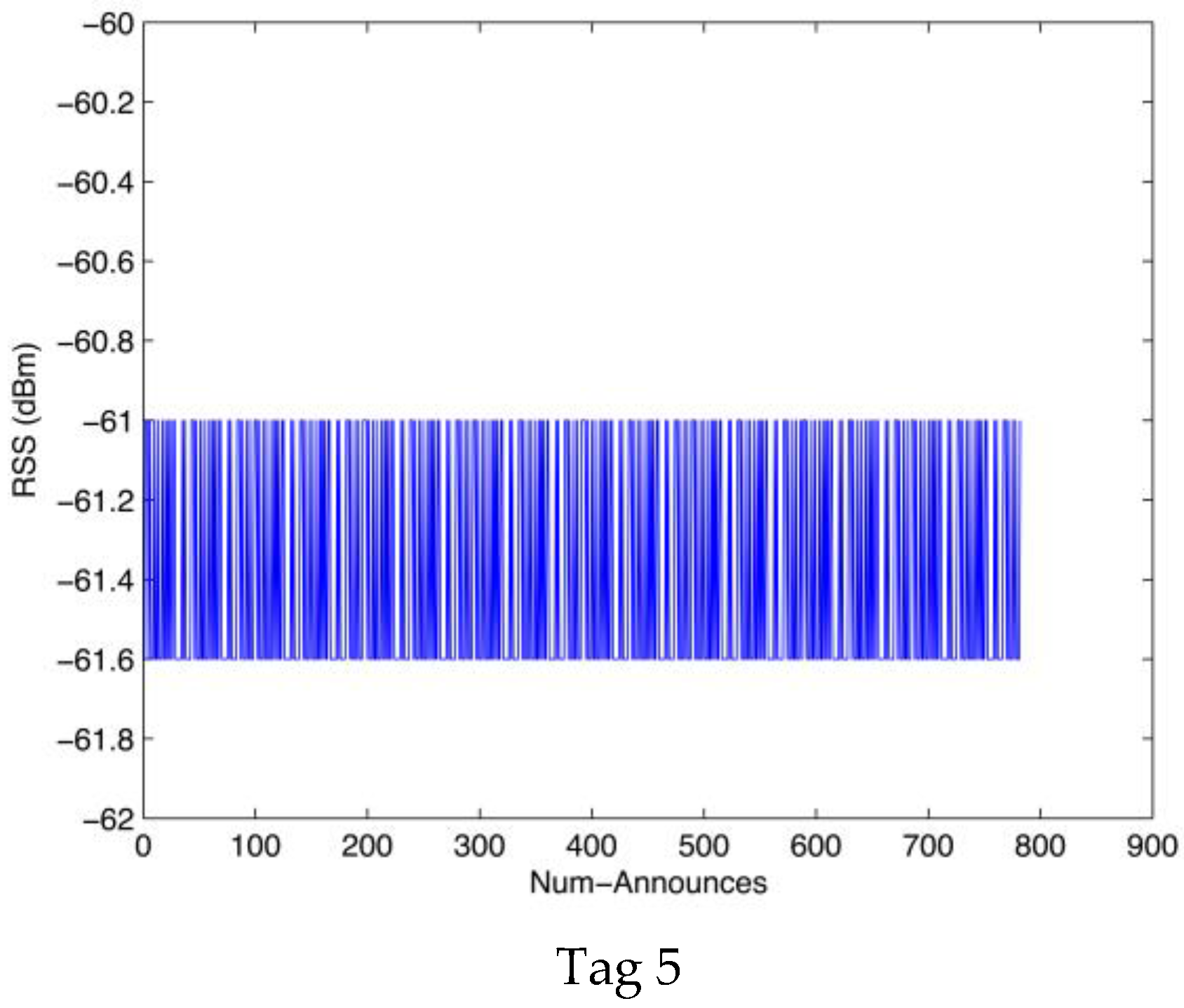
5.2. Results of the Gaussian Filter for RSS
5.3. Results of the Average Location Error
5.4. Comparisons of BKNN with Different Positioning Methods
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ijaz, F.; Yang, H.K.; Ahmad, A.W.; Lee, C. Indoor positioning: A review of indoor ultrasonic positioning systems. In Proceedings of the 15th International Conference on Advanced Communication Technology (ICACT), PyeongChang, Korea, 27–30 January 2013; pp. 1146–1150. [Google Scholar]
- Gupta, A.; Yilmaz, A. Indoor Positioning using Visual and Inertial Sensors. In Proceedings of the IEEE Sensors, Orlando, FL, USA, 30 October–3 November 2016; pp. 1–3. [Google Scholar]
- Bekkelien, A. Bluetooth Indoor Positioning; University of Geneva: Geneva, Switzerland, 2012. [Google Scholar]
- Yang, C.; Shao, H.R. WiFi-based indoor positioning. IEEE Commun. Mag. 2015, 53, 150–157. [Google Scholar] [CrossRef]
- Blankenbach, J.; Norrdine, A.; Hellmers, H. A robust and precise 3D indoor positioning system for harsh environments. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012; pp. 1–8. [Google Scholar]
- Yayan, U.; Yucel, H.; Yazici, A. A low cost ultrasonic based positioning system for the indoor navigation of mobile robots. J. Intell. Robot. Syst. 2015, 78, 541–552. [Google Scholar] [CrossRef]
- Deng, Z.-A.; Wang, G.F.; Hu, Y.; Cui, Y. Carrying Position Independent User Heading Estimation for Indoor Pedestrian Navigation with Smartphones. Sensors 2016, 16, 677. [Google Scholar] [CrossRef] [PubMed]
- Li, H. Low-cost 3d bluetooth indoor positioning with least square. Wirel. Pers. Commun. 2014, 78, 1331–1344. [Google Scholar] [CrossRef]
- Kim, H.S.; Seo, W.; Baek, K.R. Indoor positioning system using magnetic field map navigation and an encoder system. Sensors 2017, 17, 651. [Google Scholar] [CrossRef] [PubMed]
- Nascimento, H.J.; Rodrigues, E.B.; Cavalcanti, F.R.; Paiva, A.R.L. An Algorithm Based on Bayes Inference And K-nearest Neighbor for 3D WLAN Indoor Positioning. In Proceedings of the XXXIV Simposio Brasileiro De Telecomunicacoes (SBRT), Santarem, Brasil, 30 August–2 September 2016; pp. 398–402. [Google Scholar]
- Chao, C.T.; Chung, M.H.; Chiou, J.S.; Wang, C.J. A simple interface for 3d position estimation of a mobile robot with single camera. Sensors 2016, 16, 435. [Google Scholar] [CrossRef] [PubMed]
- Finkenzeller, K. RFID Handbook: Fundamentals and Applications in Contactless Smart Cards, Radio Frequency Identification and Near-Field Communication; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Zhang, J.; Tian, G.Y.; Marindra, A.M.; Sunny, A.I.; Zhao, A.B. A review of passive RFID tag antenna-based sensors and systems for structural health monitoring applications. Sensors 2017, 17, 265. [Google Scholar] [CrossRef] [PubMed]
- Martínez Pérez, M.; Vázquez González, G.; Dafonte, C. Evaluation of a Tracking System for Patients and Mixed Intravenous Medication Based on RFID Technology. Sensors 2016, 16, 2031. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.C.; Jeong, Y.S.; Park, S.O. RFID-based indoor location tracking to ensure the safety of the elderly in smart home environments. Pers. Ubiquitous Comput. 2013, 17, 1699–1707. [Google Scholar] [CrossRef]
- Mora-Mora, H.; Gilart-Iglesias, V.; Gil, D.; Sirvent-Llamas, A. A computational architecture based on RFID sensors for traceability in smart cities. Sensors 2015, 15, 13591–13626. [Google Scholar] [CrossRef] [PubMed]
- Prinsloo, J.; Malekian, R. Accurate vehicle location system using RFID, an internet of things approach. Sensors 2016, 16, 825. [Google Scholar] [CrossRef] [PubMed]
- Valero, E.; Adán, A.; Cerrada, C. Evolution of RFID applications in construction: A literature review. Sensors 2015, 15, 15988–16008. [Google Scholar] [CrossRef] [PubMed]
- Fan, H.; Wu, Q.; Lin, Y.; Zhang, J. A split-path schema-based rfid data storage model in supply chain management. Sensors 2013, 13, 5757–5776. [Google Scholar] [CrossRef] [PubMed]
- Chai, J.; Wu, C.; Zhao, C.; Chi, H.L.; Wang, X.; Ling, B.W.K.; Teo, K.L. Reference tag supported RFID tracking using robust support vector regression and Kalman filter. Adv. Eng. Inform. 2017, 32, 1–10. [Google Scholar] [CrossRef]
- Song, X.; Li, X.; Tang, W.; Zhang, W.; Li, B. A hybrid positioning strategy for vehicles in a tunnel based on RFID and in-vehicle sensors. Sensors 2014, 14, 23095–23118. [Google Scholar] [CrossRef] [PubMed]
- Shen, B.; Zheng, Q.; Li, X.; Xu, L. A framework for mining actionable navigation patterns from in-store RFID datasets via indoor mapping. Sensors 2015, 15, 5344–5375. [Google Scholar] [CrossRef] [PubMed]
- Hsu, C.C.; Chen, J.H. A novel sensor-assisted RFID-based indoor tracking system for the elderly living alone. Sensors 2011, 11, 10094–10113. [Google Scholar] [CrossRef] [PubMed]
- Domdouzis, K.; Kumar, B.; Anumba, C. Radio-Frequency Identification (RFID) applications: A brief introduction. Adv. Eng. Inform. 2007, 21, 350–355. [Google Scholar] [CrossRef]
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. Wirel. Netw. 2004, 10, 701–710. [Google Scholar] [CrossRef]
- Han, S.; Kim, J.; Park, C.H.; Yoon, H.C.; Heo, J. Optimal detection range of RFID tag for RFID-based positioning system using the k-NN algorithm. Sensors 2009, 9, 4543–4558. [Google Scholar] [CrossRef] [PubMed]
- Benelli, G.; Bertoni, D.; Sarti, G. An analysis on the use of LF RFID for the tracking of different typologies of pebbles on beaches. In Proceedings of the 2011 IEEE International Conference on RFID-Technologies and Applications (RFID-TA), Sitges, Spain, 15–16 September 2011; pp. 426–431. [Google Scholar]
- Mi, J.; Takahashi, Y. Design of an HF-Band RFID System with Multiple Readers and Passive Tags for Indoor Mobile Robot Self-Localization. Sensors 2016, 16, 1200. [Google Scholar] [CrossRef] [PubMed]
- Own, C.M.; Lee, D.S.; Wang, T.H.; Wang, D.J.; Ting, Y.L. Performance Evaluation of UHF RFID Technologies for Real-Time Bus Recognition in the Taipei Bus Station. Sensors 2013, 13, 7797–7812. [Google Scholar] [CrossRef] [PubMed]
- Xu, C.; Law, C.L. TOA estimator for UWB backscattering RFID system with clutter suppression capability. EURASIP J. Wirel. Commun. Netw. 2010, 753129. [Google Scholar] [CrossRef]
- Zhou, J.; Zhang, H.; Mo, L. Two-dimension localization of passive RFID tags using AOA estimation. In Proceedings of the 2011 IEEE Instrumentation and Measurement Technology Conference (I2MTC), Hangzhou, China, 10–12 May 2011; pp. 1–5. [Google Scholar]
- Bouchard, K.; Fortin-Simard, D.; Gaboury, S.; Bouchard, B.; Bouzouane, A. Accurate trilateration for passive RFID localization in smart homes. Int. J. Wirel. Inf. Netw. 2014, 21, 32–47. [Google Scholar] [CrossRef]
- Soonjun, S.; Boontri, D.; Cherntanomwong, P. A novel approach of RFID based indoor localization using fingerprinting techniques. In Proceedings of the 15th Asia-Pacific Conference on Communications (APCC), Shanghai, China, 8–10 October 2009; pp. 475–478. [Google Scholar]
- Buffi, A.; Nepa, P.; Lombardini, F. A phase-based technique for localization of UHF-RFID tags moving on a conveyor belt: Performance analysis and test-case measurements. IEEE Sens. J. 2015, 15, 387–396. [Google Scholar] [CrossRef]
- Guidi, F.; Sibille, A.; Roblin, C.; Casadei, V.; Dardari, D. Analysis of UWB tag backscattering and its impact on the detection coverage. IEEE Trans. Antennas Propag. 2014, 62, 4292–4303. [Google Scholar] [CrossRef]
- Guidi, F.; Decarli, N.; Bartoletti, S.; Conti, A.; Dardari, D. Detection of multiple tags based on impulsive backscattered signals. IEEE Trans. Commun. 2014, 62, 3918–3930. [Google Scholar] [CrossRef]
- Arnitz, D.; Muehlmann, U.; Witrisal, K. UWB ranging in passive UHF RFID: Proof of concept. Electron. Lett. 2010, 46, 1401–1402. [Google Scholar] [CrossRef]
- Zhao, C.; Wu, C.; Chai, J.; Wang, X.; Yang, X.; Lee, J.M.; Kim, M.J. Decomposition-based multi-objective firefly algorithm for RFID network planning with uncertainty. Appl. Soft Comput. 2017, 55, 549–564. [Google Scholar] [CrossRef]
- Guidi, F.; Decarli, N.; Dardari, D.; Mani, F.; D'Errico, R. Passive Millimeter-Wave RFID using Backscattered Signals. In Proceedings of the 2016 IEEE Globecom Workshops (GC Wkshps), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar]
- Li, D.; Zhang, B.; Li, C. A Feature-Scaling-Based k-Nearest Neighbor Algorithm for Indoor Positioning Systems. IEEE Internet Things J. 2016, 3, 590–597. [Google Scholar] [CrossRef]
- Liang, X.; Gou, X.; Liu, Y. Fingerprint-based location positioning using improved KNN. In Proceedings of the 3rd IEEE International Conference on Network Infrastructure and Digital Content (IC-NIDC), Beijing, China, 21–23 September 2012; pp. 57–61. [Google Scholar]
- Han, K.; Cho, S.H. Advanced LANDMARC with adaptive k-nearest algorithm for RFID location system. In Proceedings of the 2nd IEEE International Conference on Network Infrastructure and Digital Content, Beijing, China, 24–26 September 2010; pp. 595–598. [Google Scholar]
- Liu, X.; Wen, M.; Qin, G.; Liu, R. LANDMARC with improved k-nearest algorithm for RFID location system. In Proceedings of the 2nd IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 14–17 October 2016; pp. 2569–2572. [Google Scholar]
- Sun, Y.; Gu, F. Compressive sensing of piezoelectric sensor response signal for phased array structural health monitoring. Int. J. Sens. Netw. 2017, 23, 258–264. [Google Scholar] [CrossRef]
- Nikitin, P.V.; Martinez, R.; Ramamurthy, S.; Leland, H.; Spiess, G.; Rao, K.V.S. Phase based spatial identification of UHF RFID tags. In Proceedings of the 2010 IEEE International Conference on RFID, Orlando, FL, USA, 14–16 April 2010; pp. 102–109. [Google Scholar]
- Catarinucci, L.; Colella, R.; Tarricone, L. Design, development, and performance evaluation of a compact and long-range passive UHF RFID tag. Microw. Opt. Technol. Lett. 2012, 54, 1335–1339. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Accuracy | Time Consumption | Cost | Energy Consumption | COTS Reader | |
|---|---|---|---|---|---|---|
| Positioning Methods | ||||||
| Fingerprint [10,33] | High | Low | High | Low | Yes | |
| Reference tags [25] | Normal | High | Normal | Normal | Yes | |
| AOA [31] | High | Normal | Normal | High | Yes | |
| TDOA [6] | Low | Low | Normal | Low | No | |
| Parameter | Value |
|---|---|
| Range | 3.6 m × 4.8 m |
| Numbers of reference tags | 117 |
| Numbers of target tags | 5 |
| Index | Precision | Time Consumption | Cost | Energy Consumption | COTS Reader | |
|---|---|---|---|---|---|---|
| Positioning Methods | ||||||
| LANDMARC [25] | Normal | High | Normal | Normal | Yes | |
| Fingerprint [33] | High | Low | High | Low | Yes | |
| Phase [34] | High | High | Normal | Normal | Yes | |
| IKNN [43] | High | High | Normal | Normal | Yes | |
| Proposed BKNN | High | Normal | Low | Low | Yes |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, H.; Ding, Y.; Li, P.; Wang, R.; Li, Y. An RFID Indoor Positioning Algorithm Based on Bayesian Probability and K-Nearest Neighbor. Sensors 2017, 17, 1806. https://doi.org/10.3390/s17081806
Xu H, Ding Y, Li P, Wang R, Li Y. An RFID Indoor Positioning Algorithm Based on Bayesian Probability and K-Nearest Neighbor. Sensors. 2017; 17(8):1806. https://doi.org/10.3390/s17081806
Chicago/Turabian StyleXu, He, Ye Ding, Peng Li, Ruchuan Wang, and Yizhu Li. 2017. "An RFID Indoor Positioning Algorithm Based on Bayesian Probability and K-Nearest Neighbor" Sensors 17, no. 8: 1806. https://doi.org/10.3390/s17081806
APA StyleXu, H., Ding, Y., Li, P., Wang, R., & Li, Y. (2017). An RFID Indoor Positioning Algorithm Based on Bayesian Probability and K-Nearest Neighbor. Sensors, 17(8), 1806. https://doi.org/10.3390/s17081806