Hyperspectral and Radar Airborne Imagery over Controlled Release of Oil at Sea



Abstract
:1. Introduction
2. Experimentation at Sea
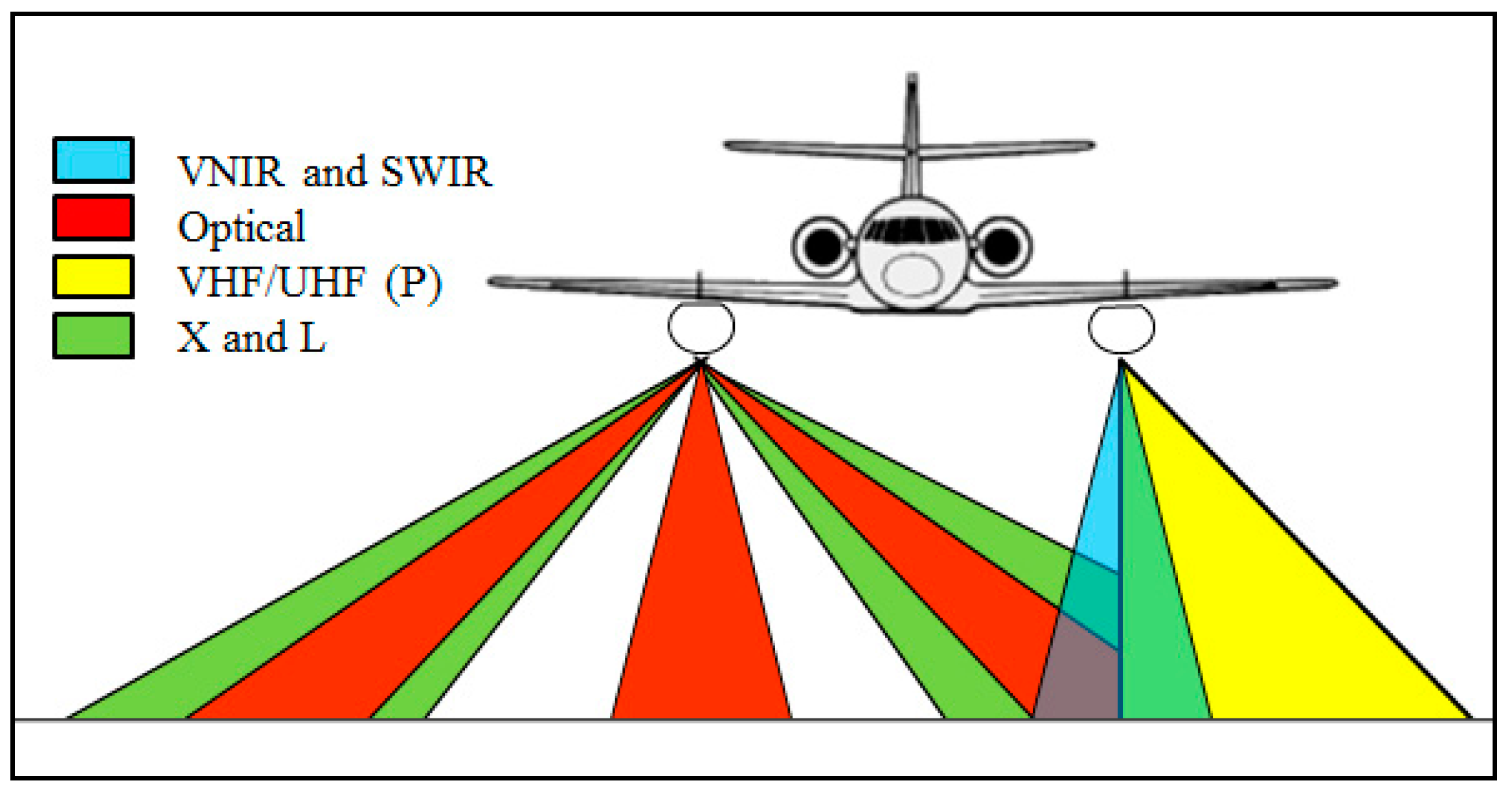
3. Airborne Campaign of Acquisition
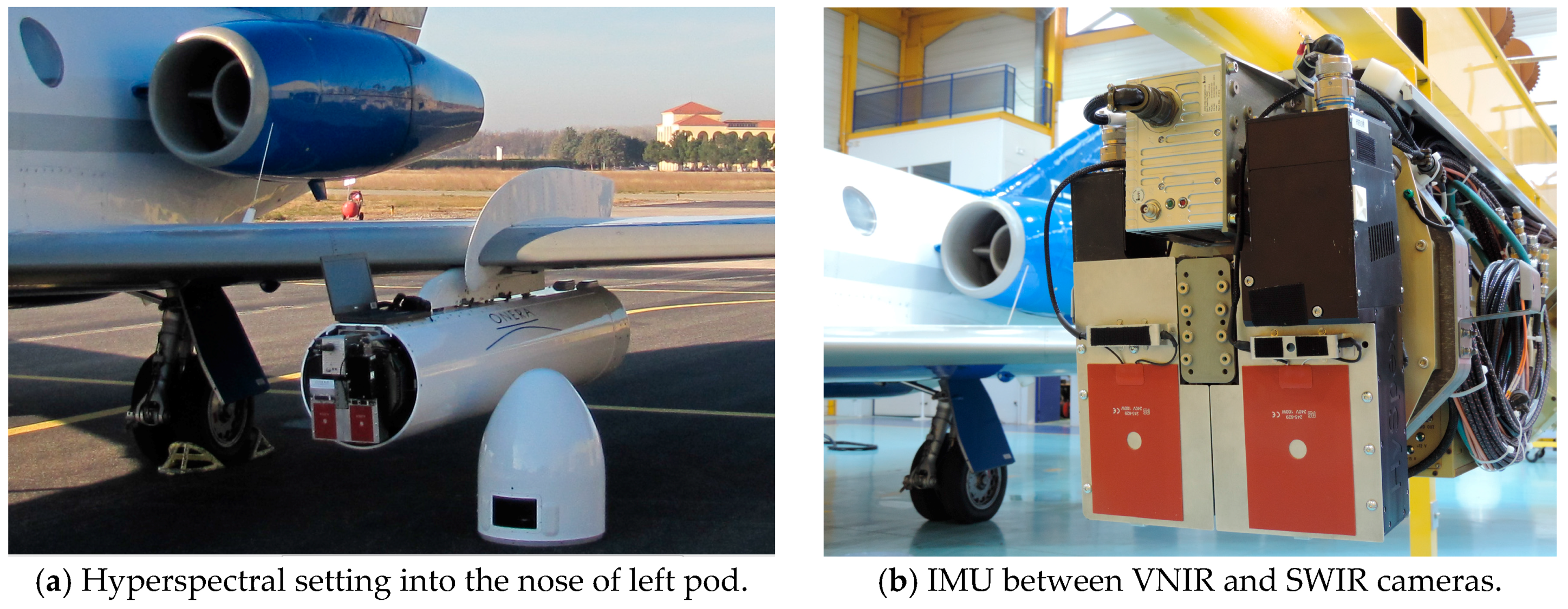
3.1. Hyperspectral Sensors
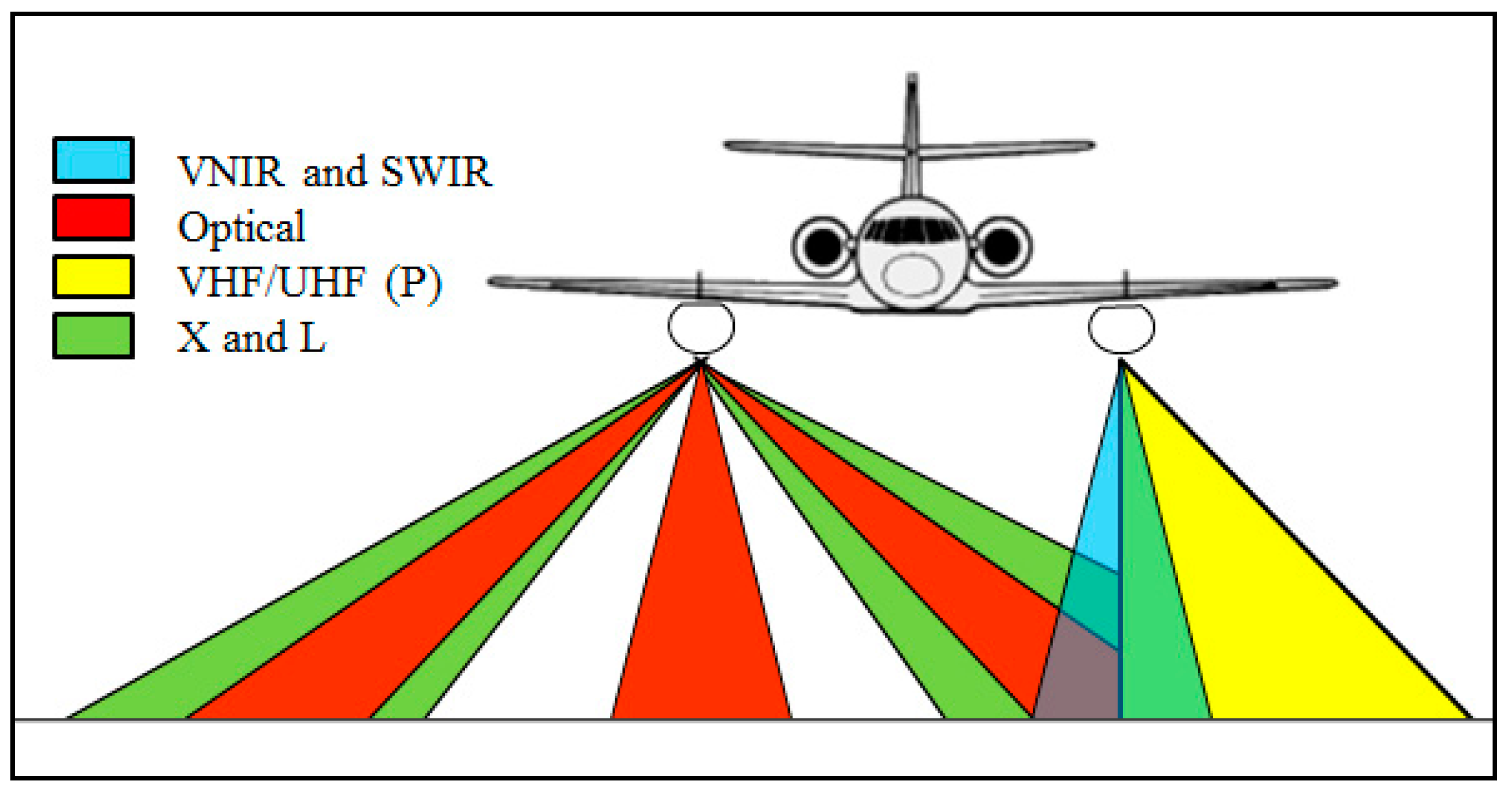
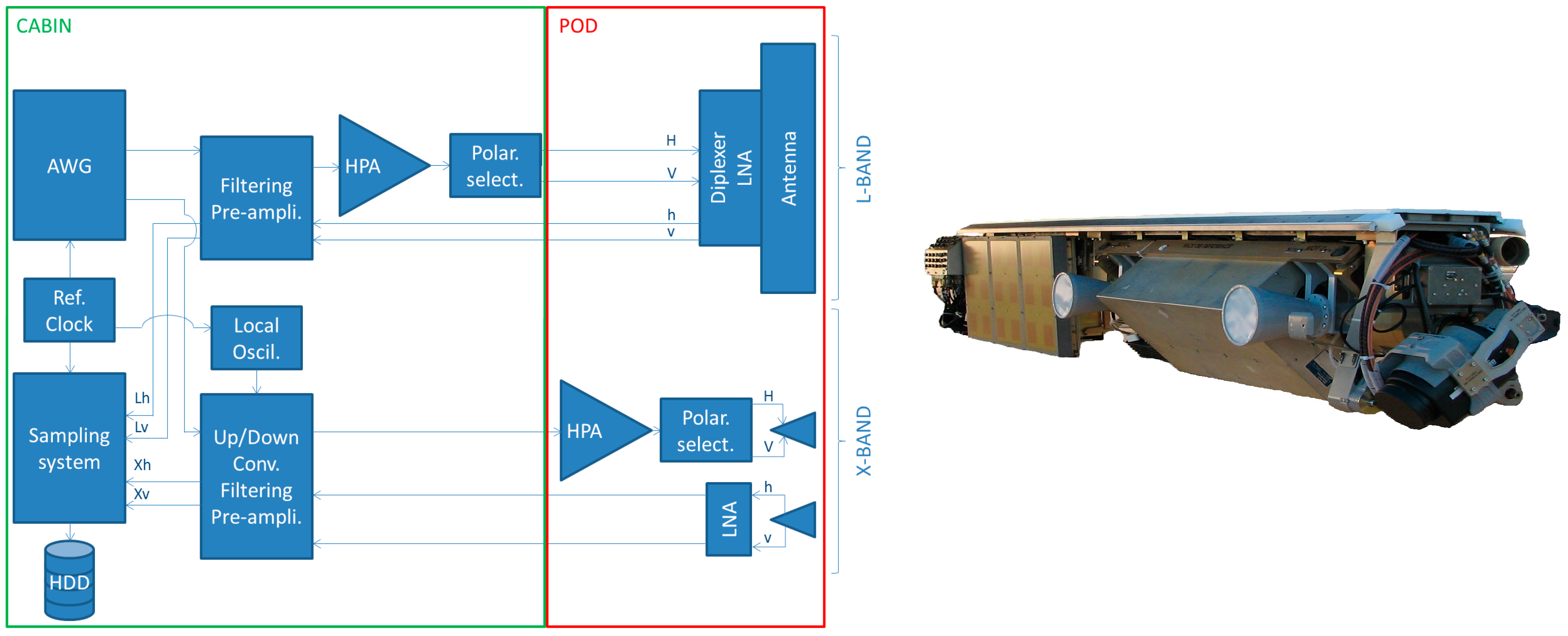
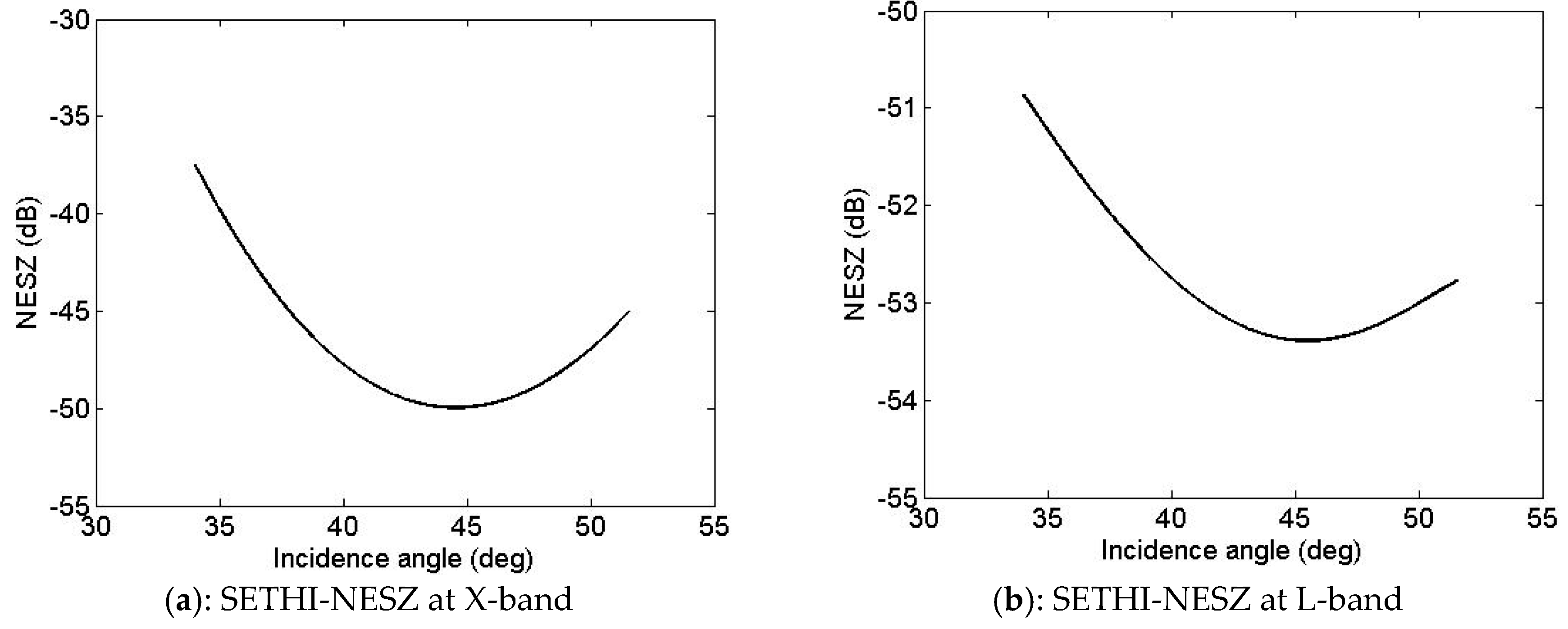
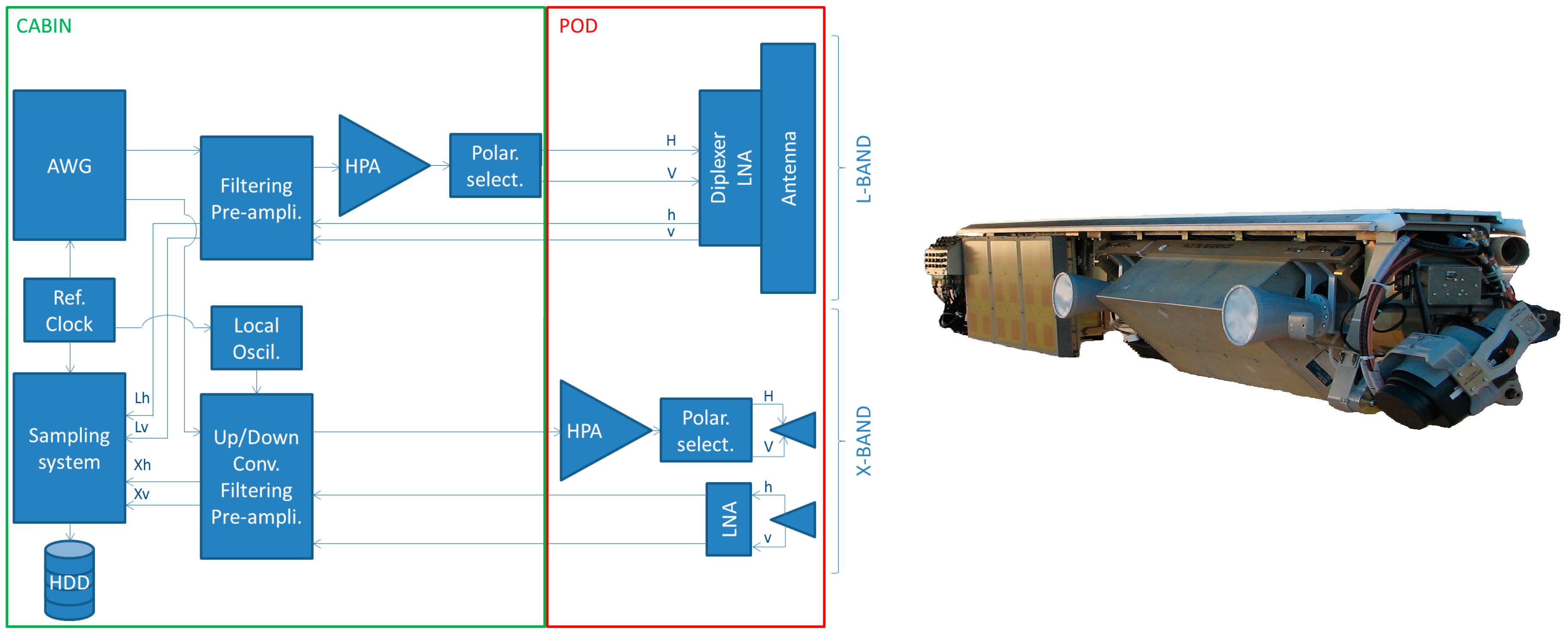
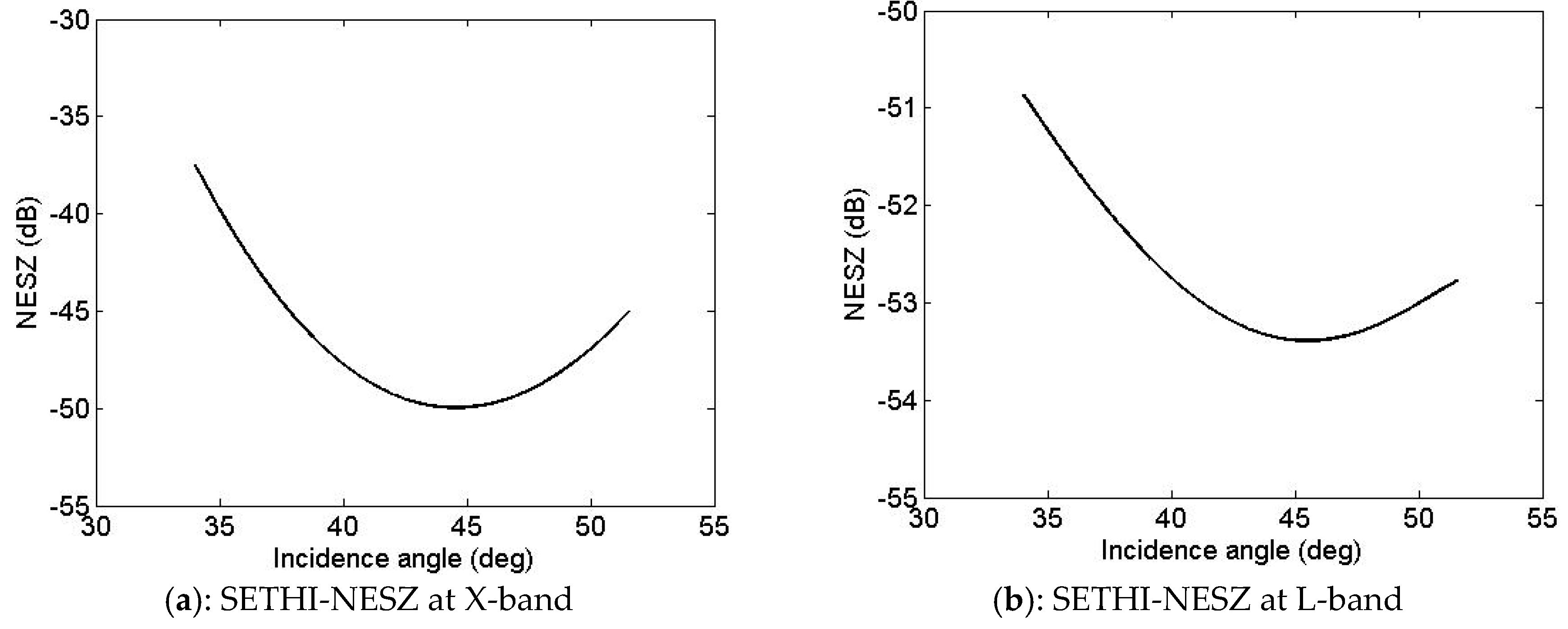
3.2. Microwave Sensors
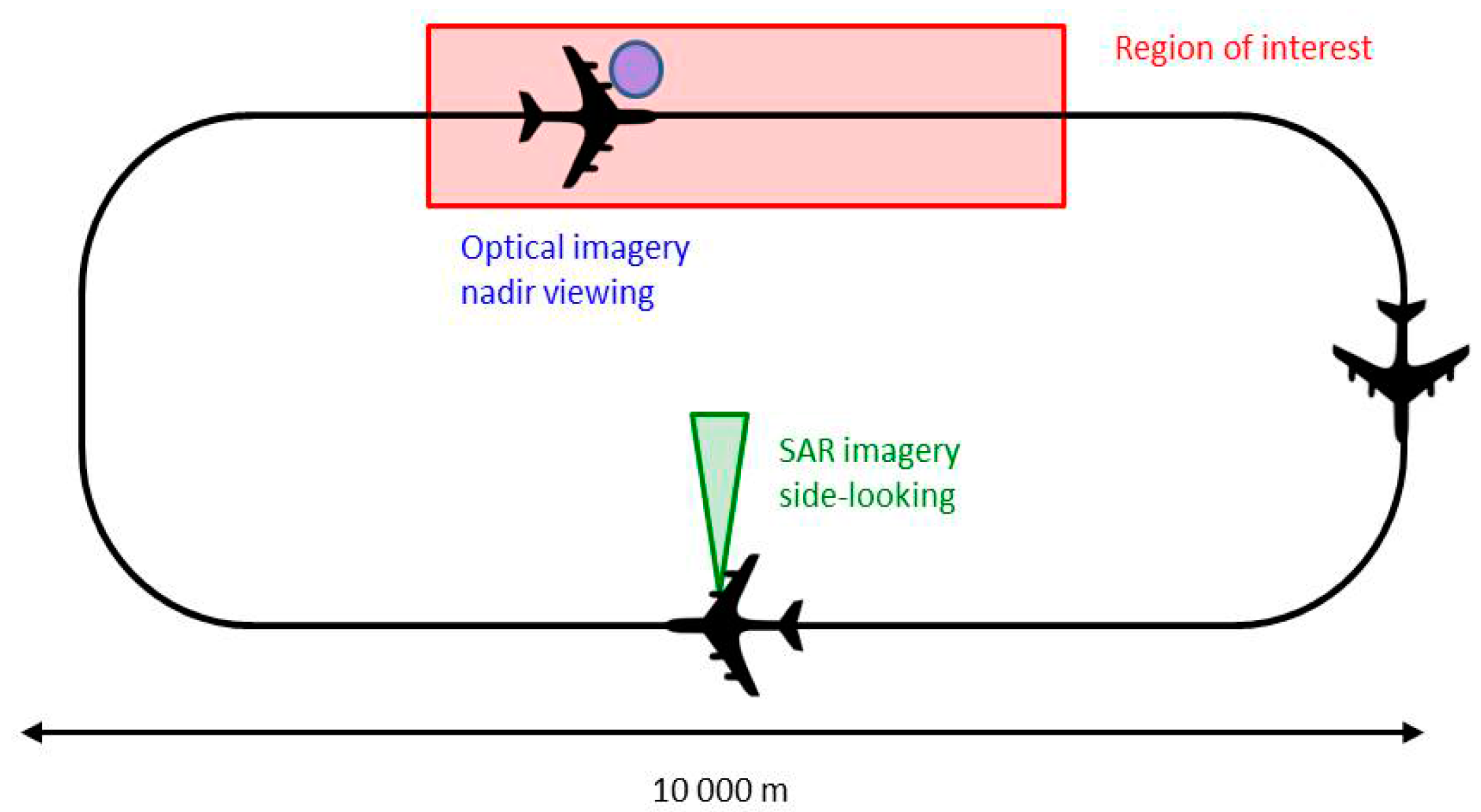
3.3. Campaign of Acquisition
4. Hyperspectral and Radar Imagery over Oil Slick
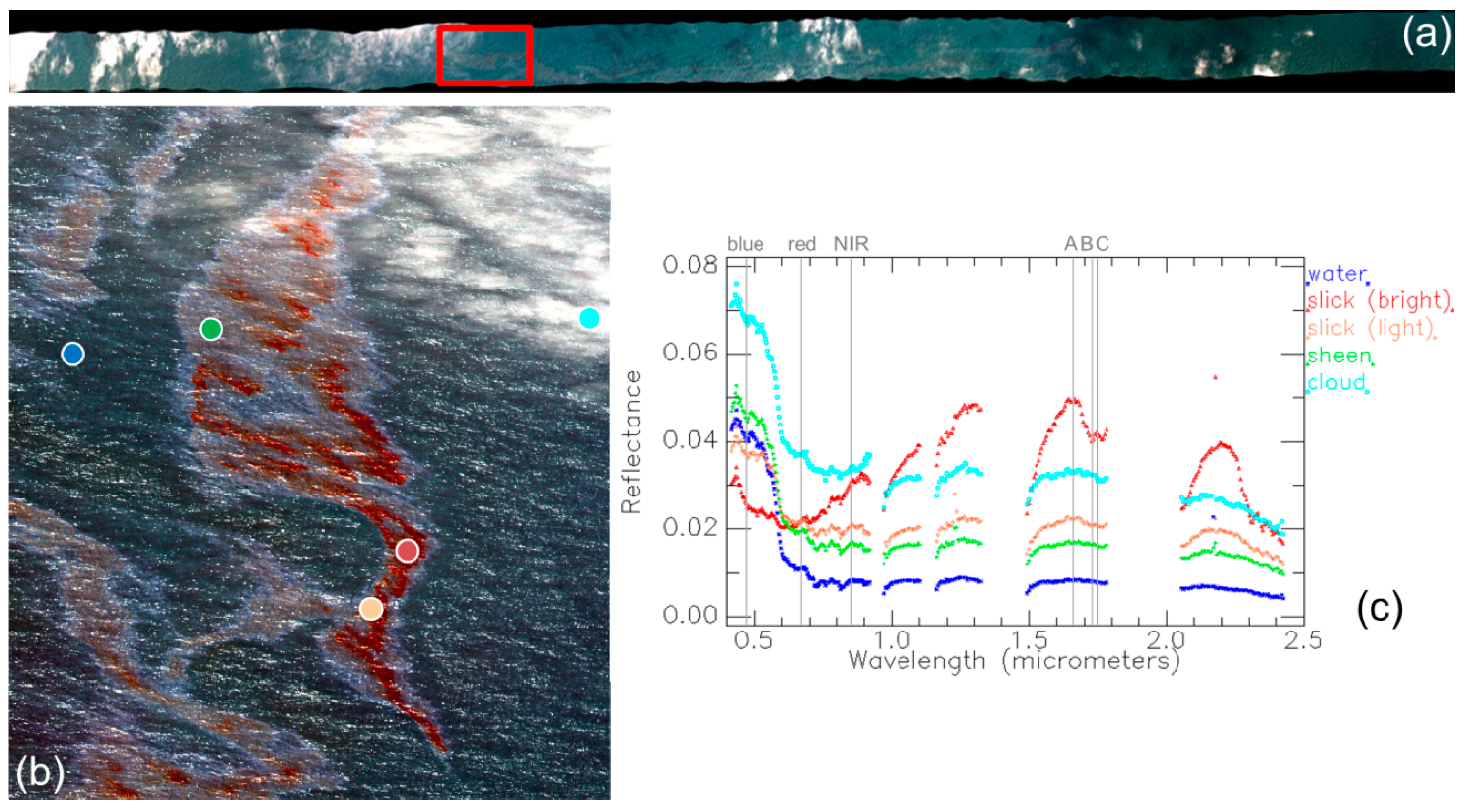
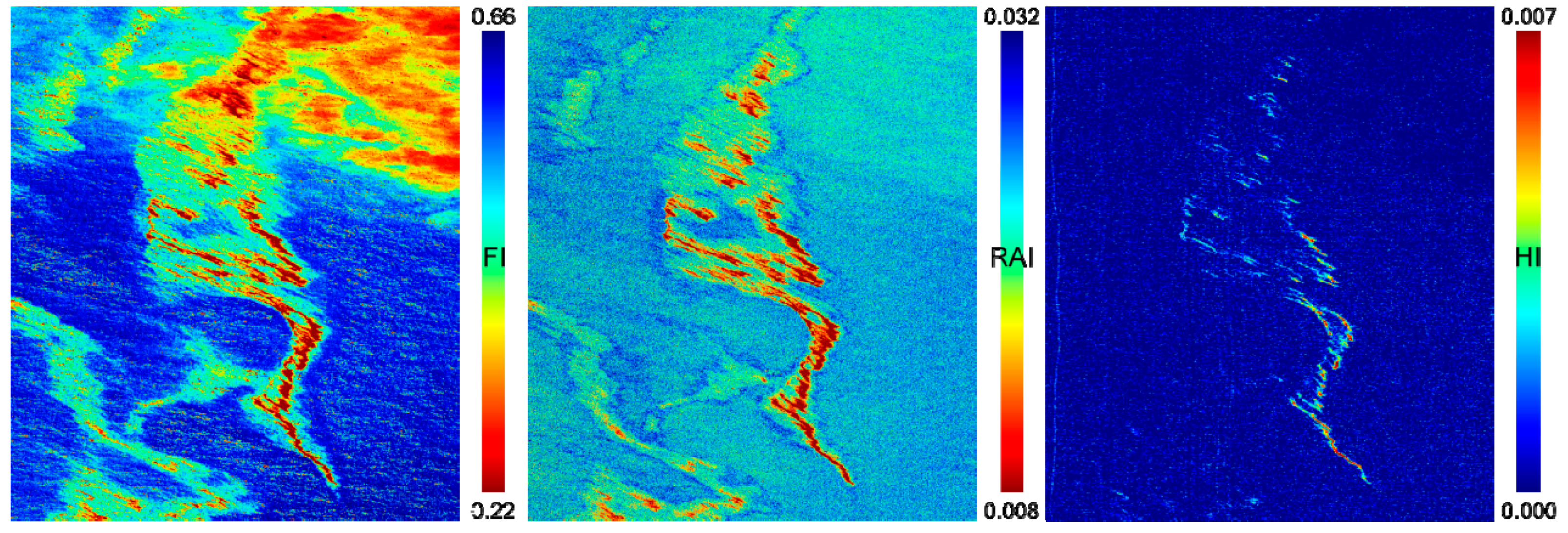
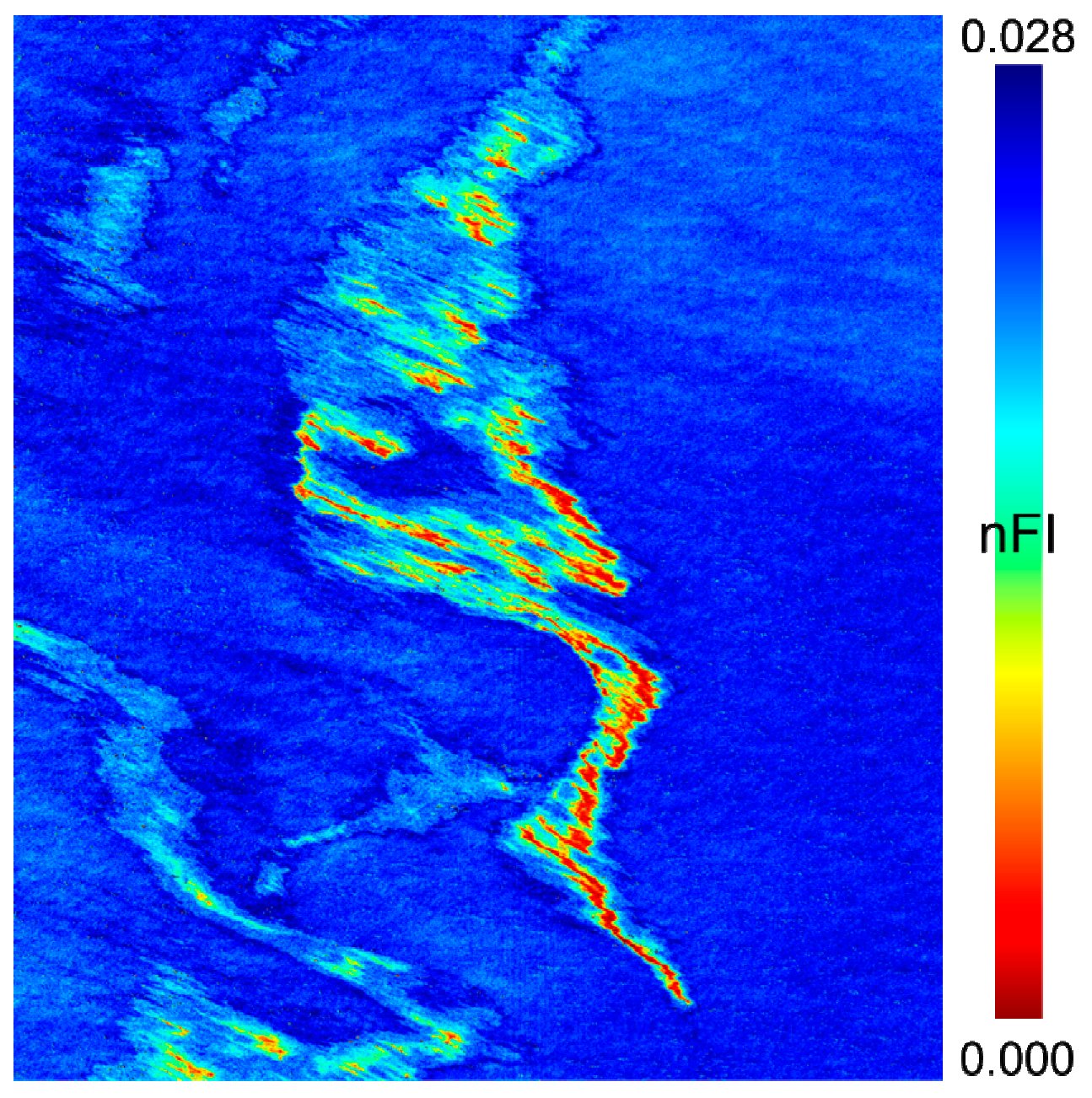
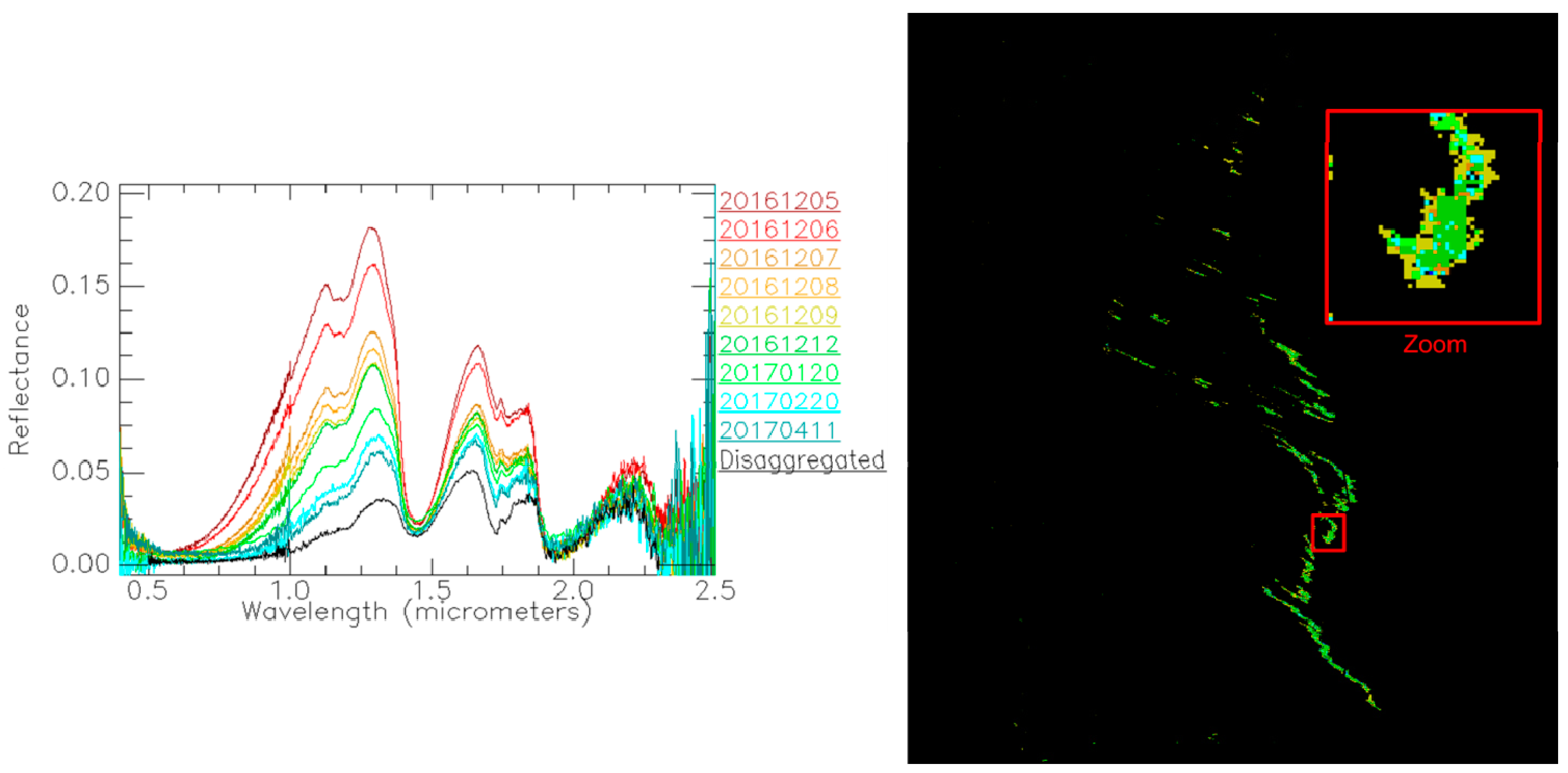
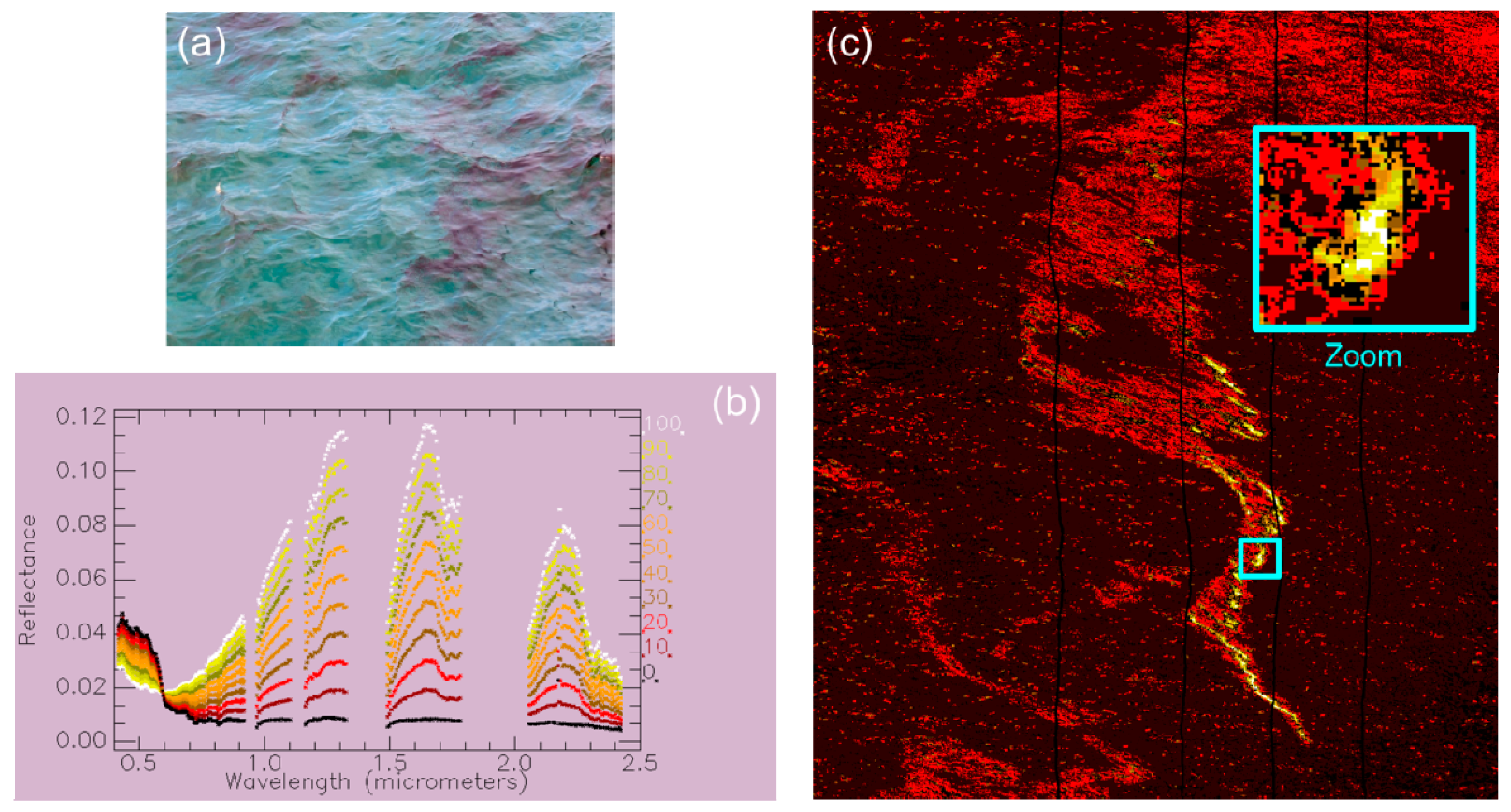
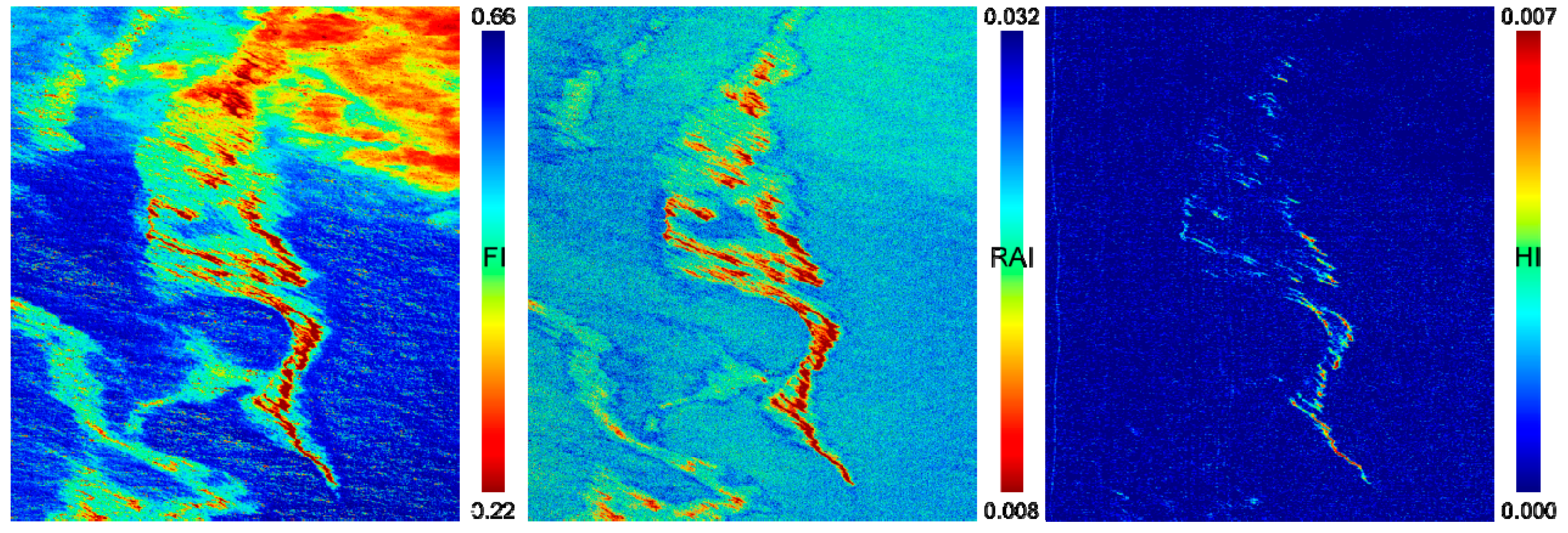
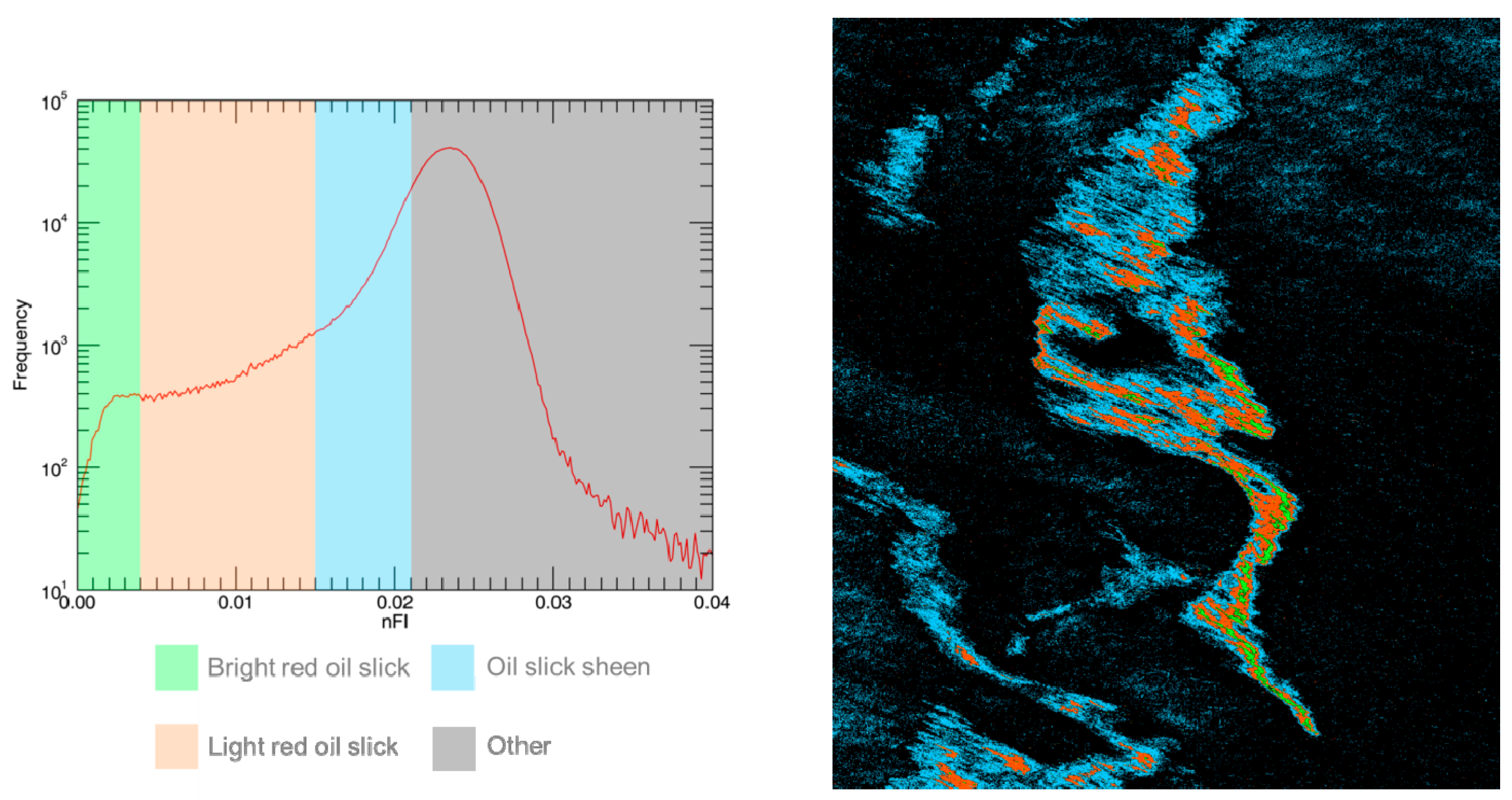
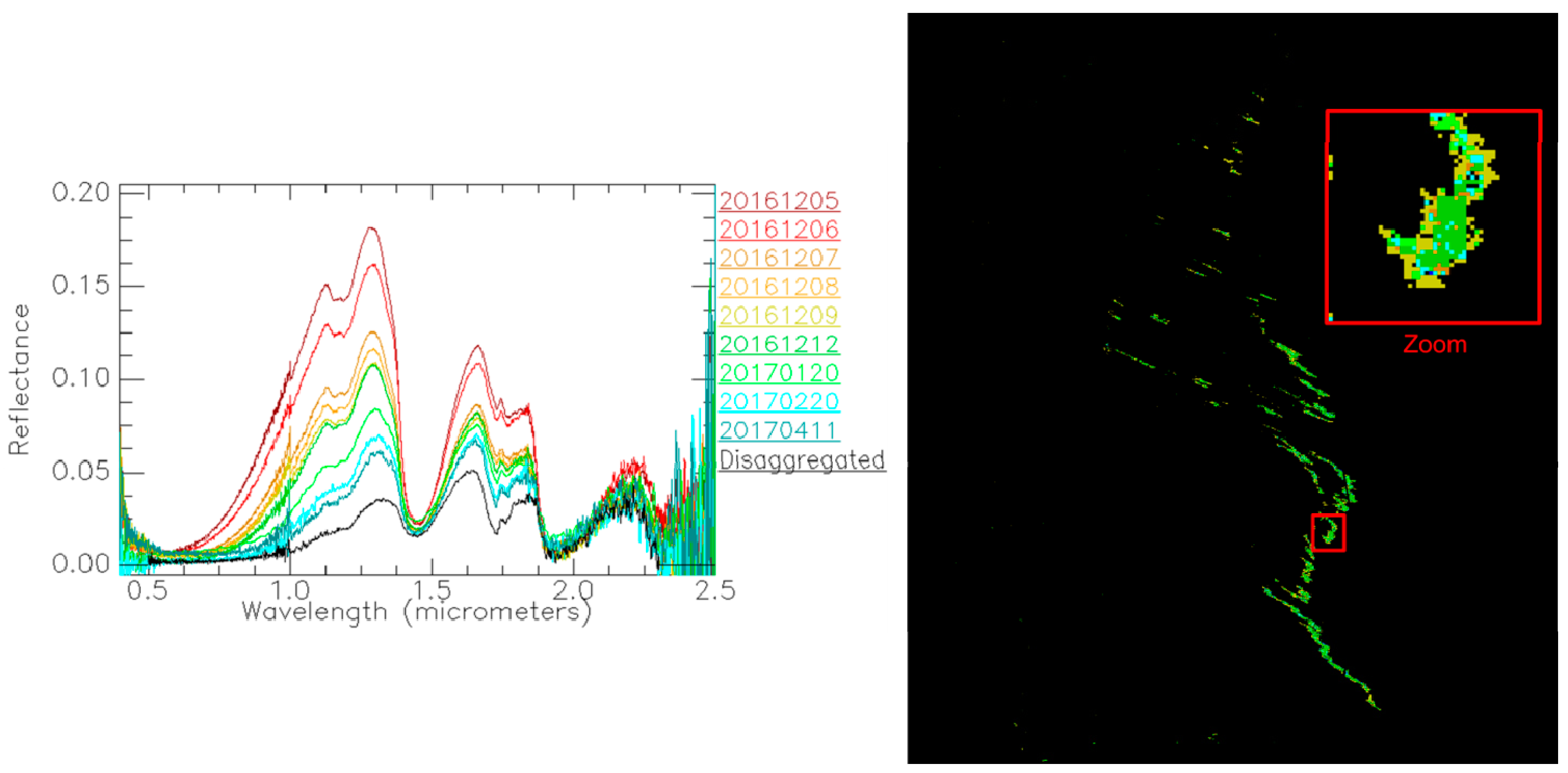
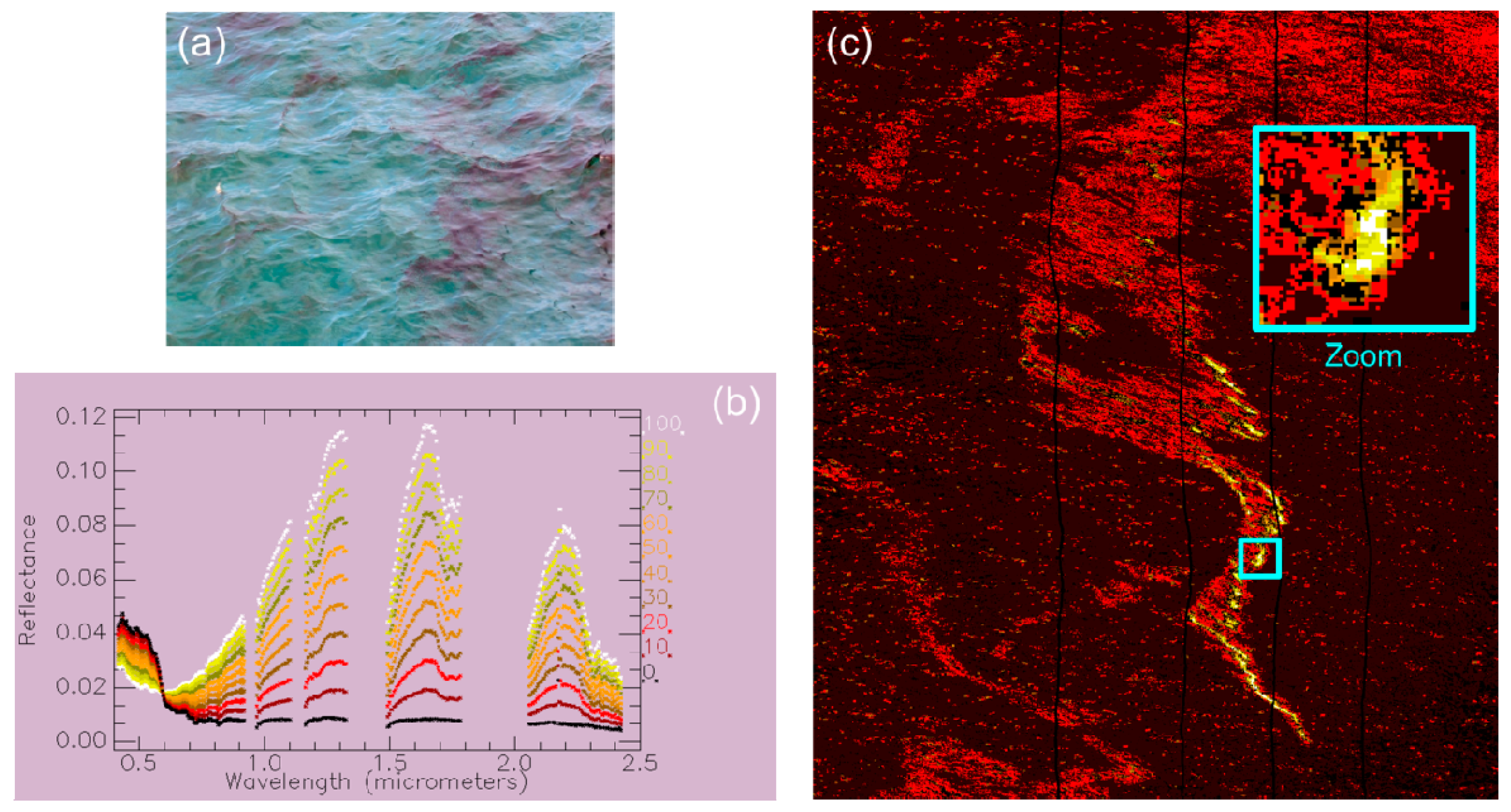
4.1. Imagery in Optical Domain
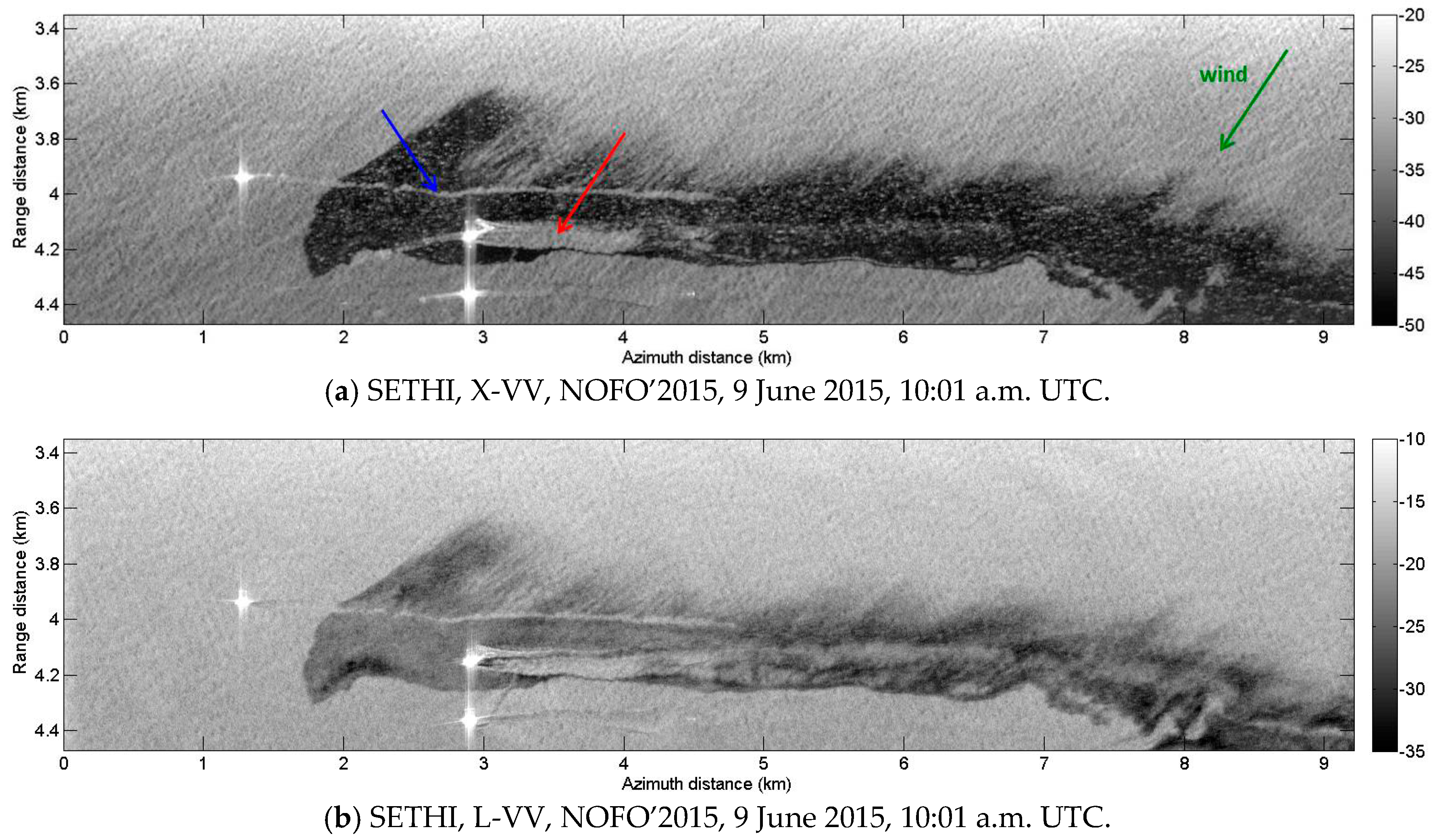
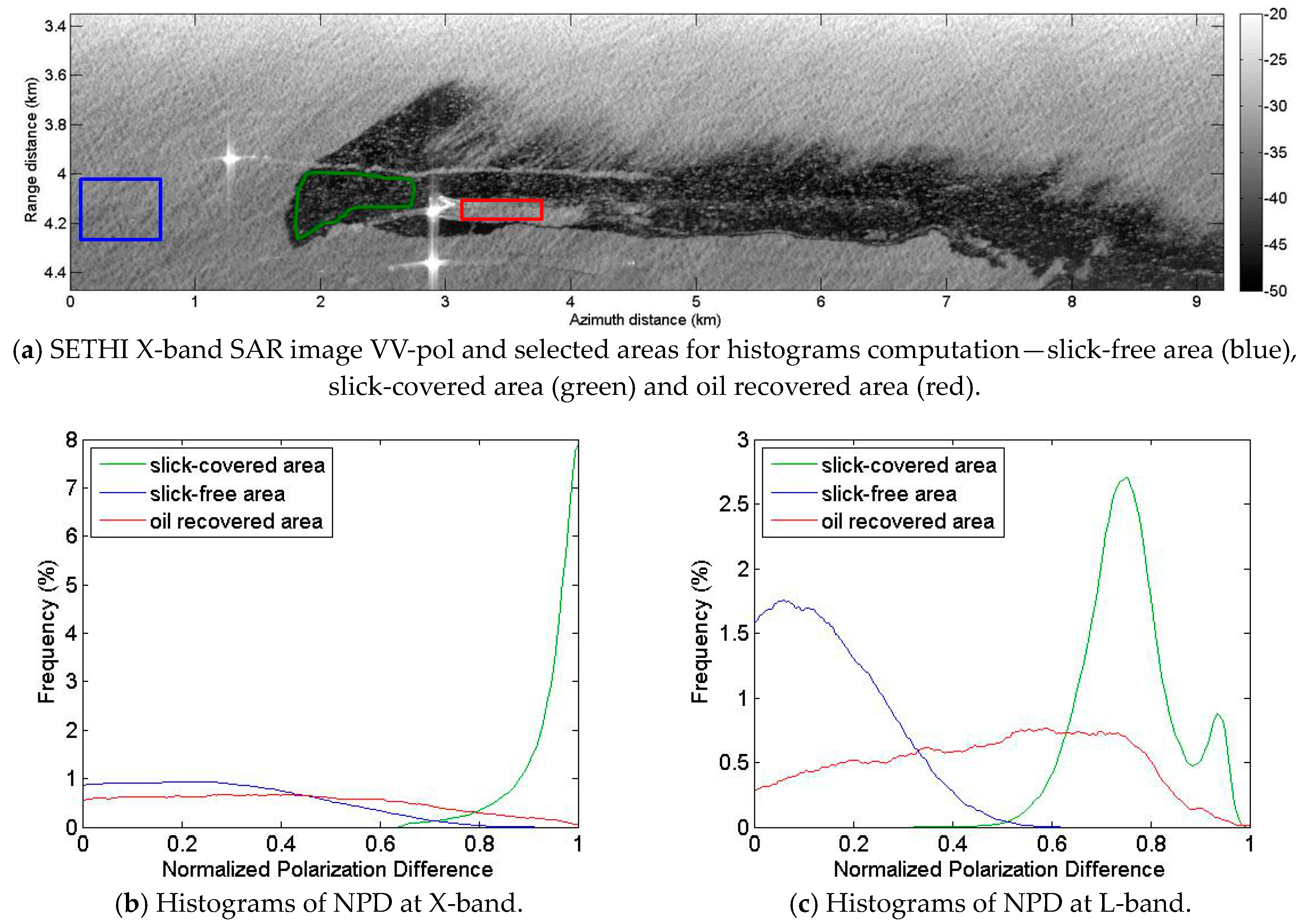
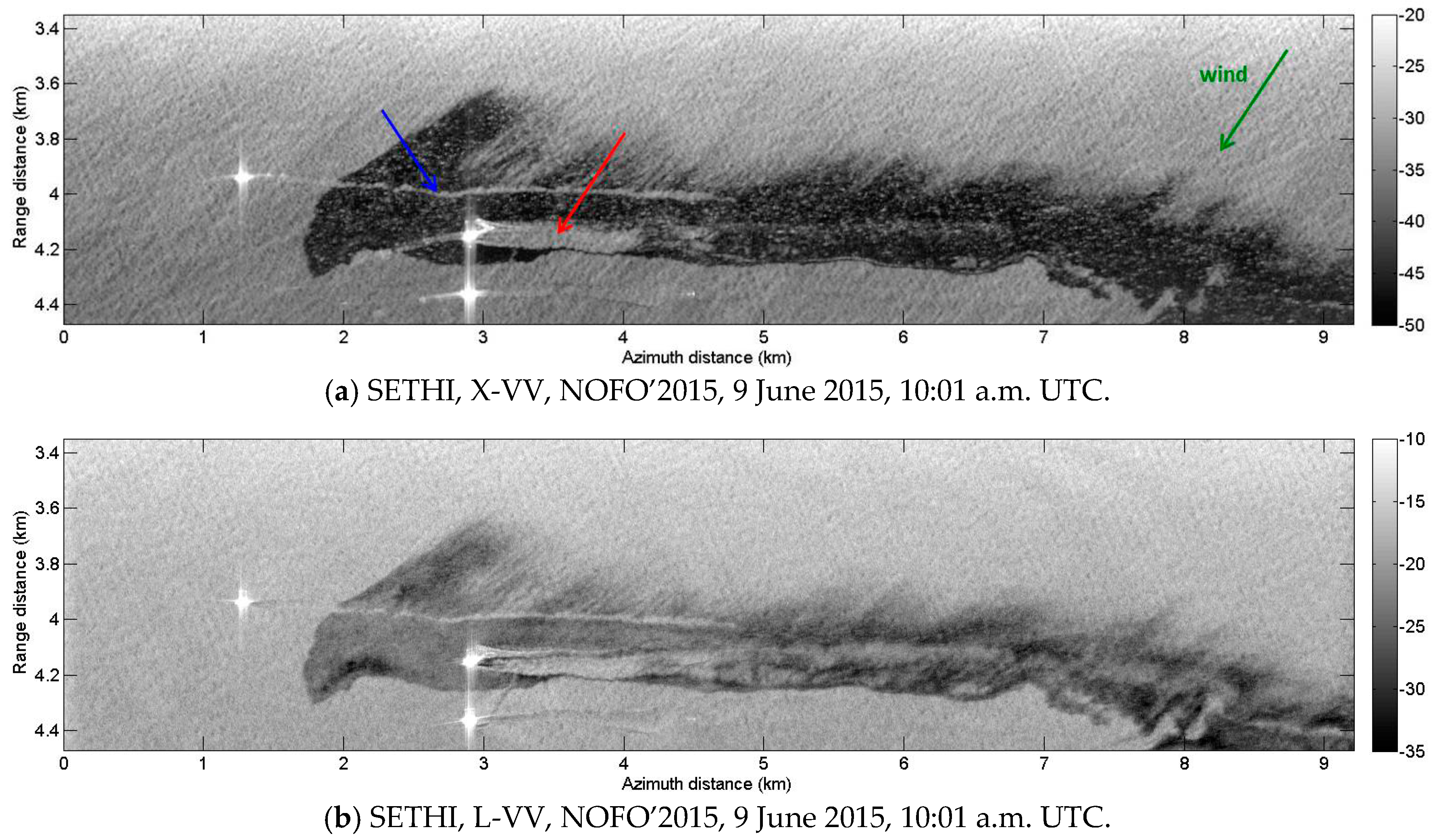
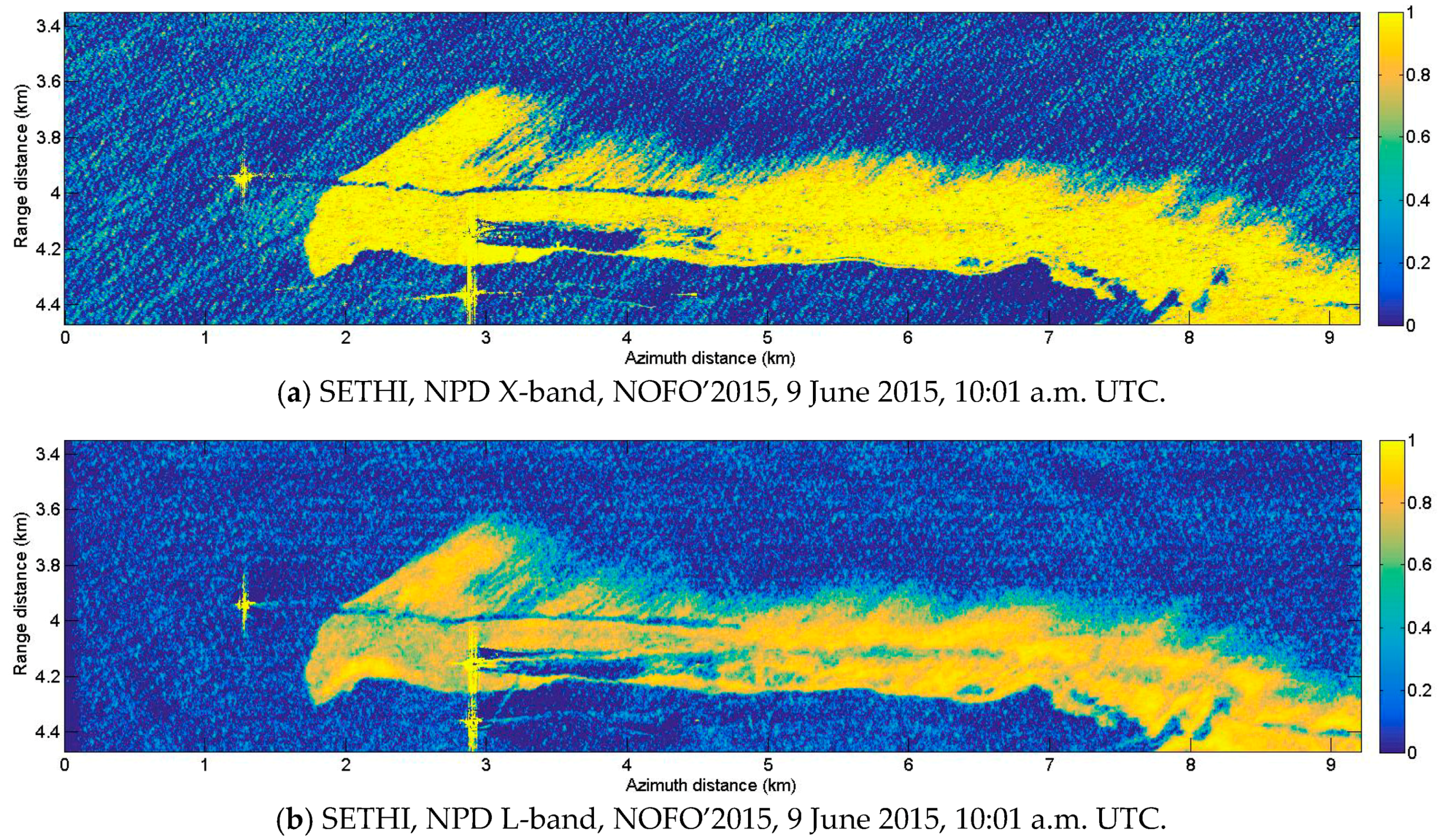
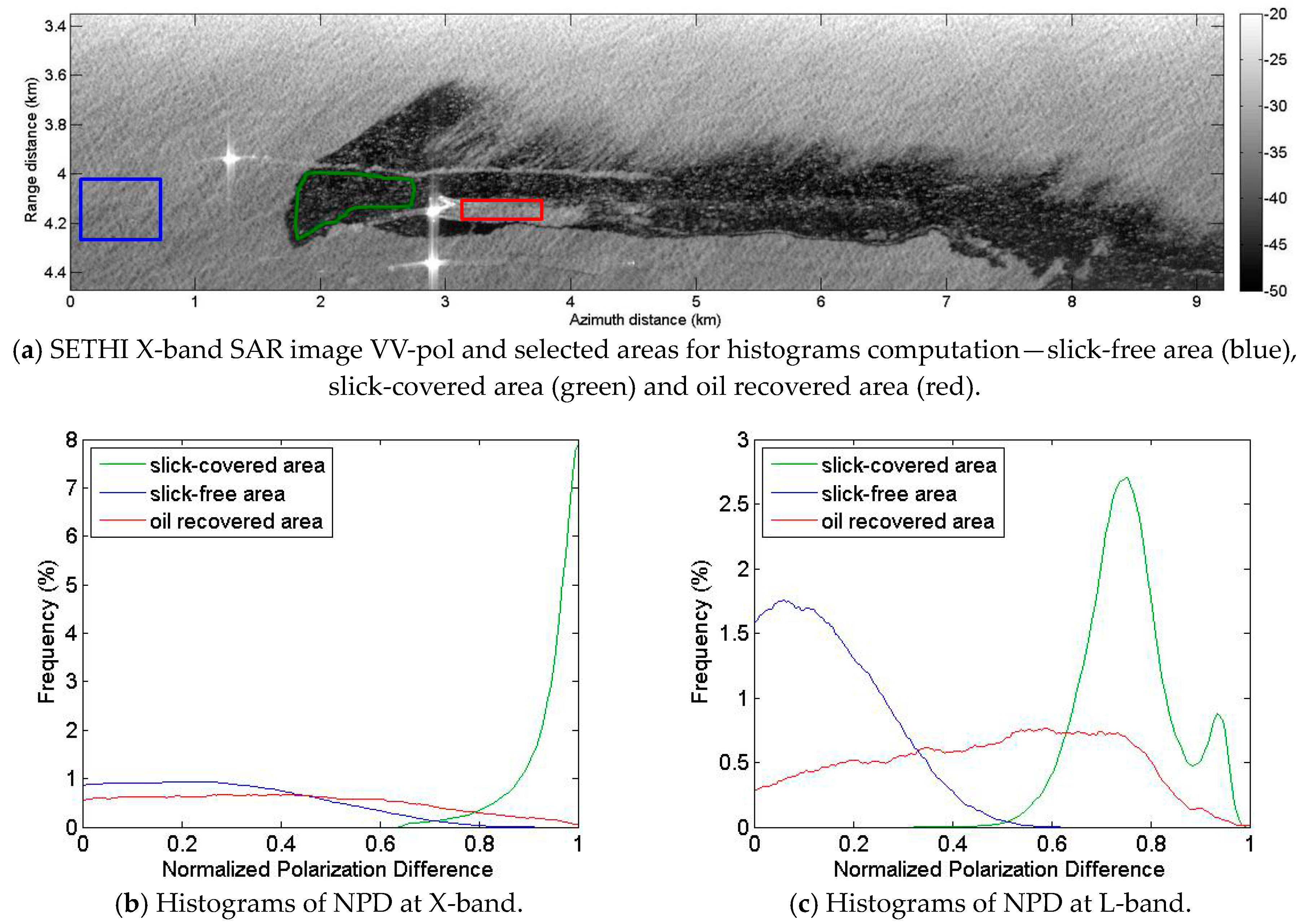
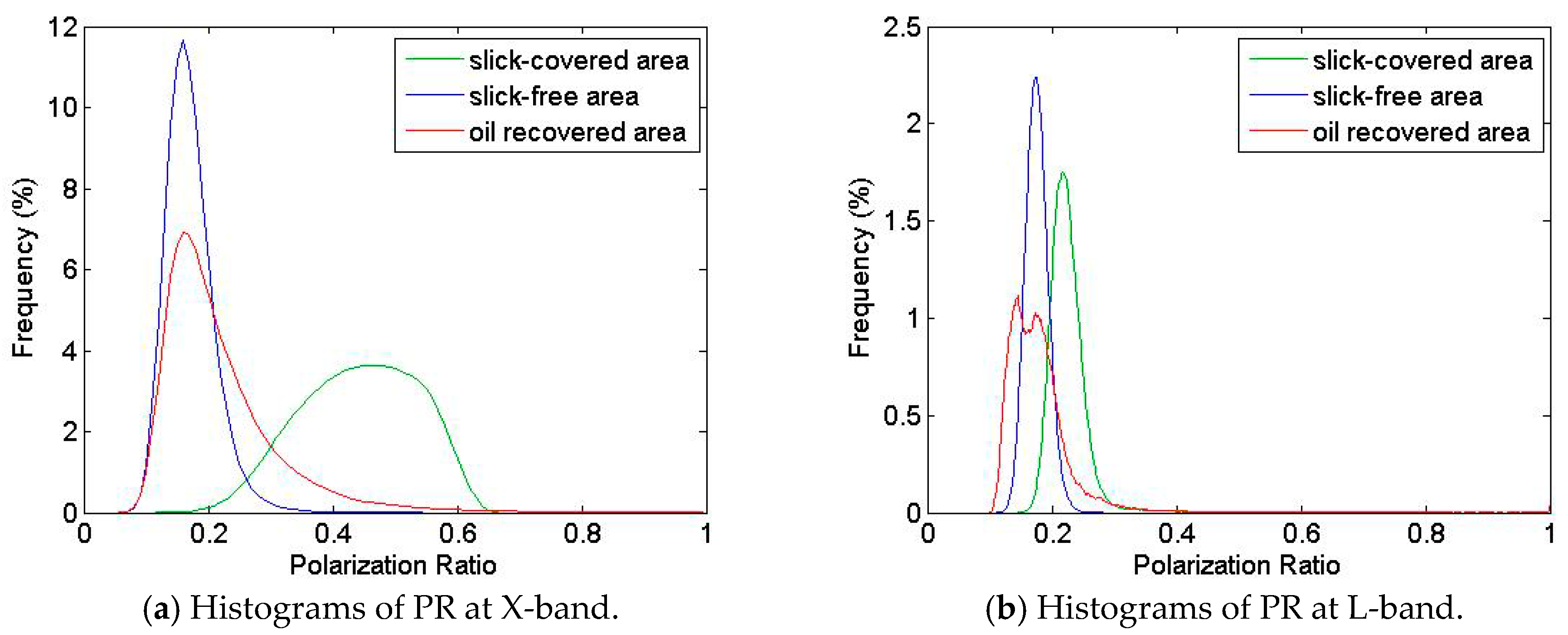
4.2. Imagery in Microwave Domain
5. Summary of Performances Assessment of Multi-Wavelength Imagery for Oil-Slick Monitoring
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fingas, M.; Brown, C. Review of oil spill remote sensing. Mar. Pollut. Bull. 2014, 83, 9–23. [Google Scholar] [CrossRef] [PubMed]
- Brekke, C.; Solberg, A. Oil spill detection by satellite remote sensing. Remote Sens. Environ. 2005, 95, 1–13. [Google Scholar] [CrossRef]
- Liu, Y.; MacFadyen, A.; Ji, Z.G.; Weisberg, R.H. Monitoring and Modeling the Deepwater Horizon Oil Spill: A Record-Breaking Enterprise; Geophysical Monograph Series: Washington, MD, USA, 2013; ISBN 9781118666753. [Google Scholar]
- Leifer, I.; Lehr, W.J.; Simecek-Beatty, D.; Bradley, E.; Clark, R.; Dennison, P.; Hu, Y.; Matheson, S.; Jones, C.E.; Holt, B.; et al. State of the art satellite and airborne marine oil spill remote sensing: Application to the BP Deepwater Horizon oil spill. Remote Sens. Environ. 2012, 124, 185–209. [Google Scholar] [CrossRef]
- Jha, M.N.; Levy, J.; Gao, Y. Advances in Remote Sensing for Oil Spill Disaster Management: State-of-the-Art Sensors Technology for Oil Spill Surveillance. Sensors 2008, 8, 236–255. [Google Scholar] [CrossRef] [PubMed]
- Gade, M.; Alpers, W. Using ERS-2 SAR images for routine observation of marine pollution in European coastal waters. Sci. Total Environ. 1999, 237–238, 441–448. [Google Scholar] [CrossRef]
- Girard-Ardhuin, F.; Mercier, G.; Collard, F.; Garello, R. Operational oil-slick characterization by SAR imagery and synergistic data. IEEE J. Ocean. Eng. 2005, 30, 487–495. [Google Scholar] [CrossRef]
- Angelliaume, S.; Minchew, B.; Chataing, S.; Martineau, P.; Miegebielle, V. Multifrequency Radar Imagery and Characterization of Hazardous and Noxious Substances at Sea. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3051–3066. [Google Scholar] [CrossRef]
- Lennon, M.; Babichenko, S.; Thomas, N.; Mariette, V.; Mercier, G. Combined passive hyperspectral imagery and active fluorescence laser spectroscopy for airborne quantitative mapping of oil slicks at sea. In Proceedings of the 4th EARSEL Workshop on Imaging Spectrospcopy, Varsaw, Poland, 14–16 April 2005. [Google Scholar]
- MOS Sweeper—Egersund Group. Available online: http://www.egersundgroup.no/oilspill/mos-sweeper (accessed on 30 July 2017).
- Skrunes, S.; Brekke, C.; Jones, C.E.; Holt, B. A Multisensor Comparison of Experimental Oil Spills in Polarimetric SAR for High Wind Conditions. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4948–4961. [Google Scholar] [CrossRef]
- Baque, R.; Ruault du Plessis, O.; Dreuillet, P.; Frederic, Y.M. SETHI and RAMSES-NG—Flexible multi-spectral airborne remote sensing research platforms. In Proceedings of the International Conference on Radar, Guangzhou, China, 10–13 October 2016. [Google Scholar]
- Souchon, J.P.; Thom, C.; Meynard, C.; Martin, O.; Pierrot-Deseilligny, M. The IGN CAMv2 System. Photogramm. Rec. 2010, 25, 402–421. [Google Scholar] [CrossRef]
- HySpex Hyperspectral Cameras—Norsk Elektro Optikk. Available online: http://www.hyspex.no/products/ (accessed on 30 July 2017).
- Miesch, C.; Poutier, L.; Achard, V.; Briottet, X.; Lenot, X.; Boucher, Y. Direct and inverse radiative transfer solutions for visible and near-infrared hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1552–1562. [Google Scholar] [CrossRef]
- Berk, A.; Anderson, G.P.; Bernstein, L.S.; Acharya, P.K.; Dothe, H.; Matthew, M.W.; Adler-Golden, S.M.; Chetwynd, J.H.; Richtsmeier, S.C.; Pukall, B.; et al. MODTRAN4 radiative transfer modeling for atmospheric correction. In Proceedings of the SPIE Conference Optical Spectroscopic Techniques and Instrumentation for Atmospheric and Space Research III, Denver, CO, USA, 18 July 1999; Volume 3756. [Google Scholar]
- Hajnsek, I.; Pottier, E.; Cloude, S.R. Inversion of surface parameters from polarimetric SAR. IEEE Trans. Geosci. Remote Sens. 2003, 41, 727–744. [Google Scholar] [CrossRef]
- Andreoli, G.; Bulgarelli, B.; Hosgood, B.; Tarchi, D. Hyperspectral Analysis of Oil and Oil-Impacted Soils for Remote Sensing Purposes; European Commission Joint Research Centre: Luxembourg, 2007; p. 36. [Google Scholar]
- Clark, R.; Swayze, G.A.; Leifer, I.; Livo, K.E.; Lundeem, S. A Method for Quantitative Mapping of Thick Oil Spills Using Imaging Spectroscopy; United States Geological Survey: Reston, WV, USA, 2010. [Google Scholar]
- Brigot, G.; Colin-Koeniguer, E.; Plyer, A.; Janez, F. Adaptation and Evaluation of an Optical Flow Method Applied to Coregistration of Forest Remote Sensing Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 2923–2939. [Google Scholar] [CrossRef]
- Cloutis, E. Spectral Reflectance Properties of Hydrocarbons: Remote-Sensing Implications. Science 1989, 245, 165–168. [Google Scholar] [CrossRef] [PubMed]
- Lennon, M.; Mariette, V.; Coat, A.; Verbeque, V.; Mouge, P.; Borstad, G.A.; Willis, P.; Kerr, R.; Alvarez, M. Detection and mapping of the November 2002 Prestige tanker oil spill in Galicia, Spain, with the airborne multispectral CASI sensor. In Proceedings of the 3rd EARSEL workshop on Imaging Spectroscopy, Herrsching, Germany, 13–16 May 2003. [Google Scholar]
- Kühn, F.; Oppermann, K.; Hoerig, B. Hydrocarbon Index—An algorithm for hyperspectral detection of hydrocarbons. Int. J. Remote Sens. 2004, 25, 2467–2473. [Google Scholar] [CrossRef]
- Chang, C.I. An information-theoretic approach to spectral variability, similarity, and discrimination for hyperspectral image analysis. IEEE Trans. Inf. Theory 2000, 46, 1927–1932. [Google Scholar] [CrossRef]
- Wismann, V.; Gade, M.; Alpers, W.; Huhnerfuss, H. Radar signatures of marine mineral oil spills measured by an airborne multi-frequency radar. Int. J. Remote. Sens. 1998, 19, 3607–3623. [Google Scholar] [CrossRef]
- Gade, M.; Alpers, W.; Hühnerfuss, H.; Wismann, V.; Lange, P. On the reduction of the radar backscatter by oceanic surface films: Scatterometer measurements and their theoretical interpretation. Remote Sens. Environ. 1998, 66, 52–70. [Google Scholar] [CrossRef]
- Gade, M.; Alpers, W.; Hühnerfuss, H.; Masuko, H.; Kobayashi, T. Imaging of biogenic and anthropogenic ocean surface films by the multifrequency/multipolarization SIR-C/X-SAR. J. Geophys. Res. 1998, 103, 18851–18866. [Google Scholar] [CrossRef]
- Kudryavtsev, V.; Chapron, B.; Myasoedov, A.G.; Collard, F.; Johannessen, J.A. On Dual Co-Polarized SAR Measurements of the Ocean Surface. IEEE Geosci. Remote Sens. Lett. 2013, 10, 761–765. [Google Scholar] [CrossRef]
- Hansen, M.W.; Kudryavtsev, V.; Chapron, B.; Brekke, C.; Johannessen, J.A. Wave Breaking in Slicks: Impacts on C-Band Quad-Polarized SAR Measurements. IEEE J Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4929–4940. [Google Scholar] [CrossRef]
- Guerin, C.A.; Soriano, G.; Chapron, B. The weighted curvature approximation in scattering from sea surfaces. Waves Random Complex Media 2010, 20, 364–384. [Google Scholar] [CrossRef]
- Hühnerfuss, H.; Alpers, W.; Dannhauer, H.; Gade, M.; Lange, P.A.; Neumann, V.; Wismann, V. Natural and man-made sea slicks in the North Sea investigated by a helicopter-borne 5-frequency radar scatterometer. Int. J. Remote Sens. 1996, 17, 1567–1582. [Google Scholar] [CrossRef]
- Minchew, B. Determining the mixing of oil and seawater using polarimetric synthetic aperture radar. Geophys. Res. Lett. 2012, 39, L16607. [Google Scholar] [CrossRef]
- Holt, B. SAR imaging of the ocean surface. In Synthetic Aperture Radar (SAR) Marine User’s Manual; Jackson, C.R., Apel, J.R., Eds.; NOAA: Silver Spring, MD, USA, 2004; pp. 263–275. [Google Scholar]
- Latini, D.; Frate, F.D.; Jones, C.E. Multi-frequency and polarimetric quantitative analysis of the Gulf of Mexico oil spill event comparing different SAR systems. Remote Sens. Environ. 2016, 183, 26–42. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Time (UTC) | Wind Speed at 10 m (m·s−1) | Wind Direction (from-deg) | Significant Wave Height (m) |
|---|---|---|---|---|
| 9 June 2015 | 06:00 | 5 | 250 | 1 |
| 09:00 | 5 | 250 | 1 | |
| 12:00 | 7 | 250 | 1 |
| Optical Sensors | HySpex VNIR1600 | HySpex SWIR320m-e | Panchromatic CamV2 |
|---|---|---|---|
| Number of pixels | 1600 | 320 | 7256 × 5462 |
| Field of view | 17° | 14° | 27° |
| Spectral domain | 0.4–1.0 µm | 1.0–2.5 µm | 0.4–0.8 µm |
| Spectral sampling | 3.6 nm | 6 nm | - |
| Ground sampling distance (across and along track) at 9000 ft | 0.51 × 1.03 m | 2.06 × 2.06 m | 0.17 × 0.17 m |
| Radar Sensors | SAR X-Band | SAR L-Band |
|---|---|---|
| Carrier frequency | 9.75 GHz | 1.325 GHz |
| Bandwidth/Slant range resolution | 300 MHz/0.5 m | 150 MHz/1 m |
| Pulse Repetition Frequency (PRF) | 5000 Hz | 5000 Hz |
| Pulse duration | 20 µs | 20 µs |
| Sampling frequency | 800 MHz | 800 MHz |
| Run | Time (UTC) | Sensor | Flight Heading (deg) | Viewing Direction (deg) |
|---|---|---|---|---|
| 1 | 09:32 | HS VNIR + SWIR | 288° | Nadir |
| 2 | 09:34 | HS VNIR + SWIR | 290° | Nadir |
| 3 | 09:37 | PolSAR X + L | 108° | 198° |
| 4 | 09:43 | HS VNIR + SWIR | 292° | Nadir |
| 5 | 09:46 | PolSAR X + L | 113° | 203° |
| 6 | 09:52 | HS VNIR + SWIR | 294° | Nadir |
| 7 | 09:55 | PolSAR X + L | 113° | 203 |
| 8 | 10:01 | PolSAR X + L | 293° | 023° |
| 9 | 10:08 | HS VNIR + SWIR | 298° | Nadir |
| 10 | 10:12 | HS VNIR + SWIR | 116° | Nadir |
| 11 | 10:17 | HS VNIR + SWIR | 293° | Nadir |
| 12 | 10:20 | PolSAR X + L | 108° | 198° |
| 13 | 10:24 | HS VNIR + SWIR | 286° | Nadir |
| 14 | 10:27 | PolSAR X + L | 107° | 197° |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Angelliaume, S.; Ceamanos, X.; Viallefont-Robinet, F.; Baqué, R.; Déliot, P.; Miegebielle, V. Hyperspectral and Radar Airborne Imagery over Controlled Release of Oil at Sea. Sensors 2017, 17, 1772. https://doi.org/10.3390/s17081772
Angelliaume S, Ceamanos X, Viallefont-Robinet F, Baqué R, Déliot P, Miegebielle V. Hyperspectral and Radar Airborne Imagery over Controlled Release of Oil at Sea. Sensors. 2017; 17(8):1772. https://doi.org/10.3390/s17081772
Chicago/Turabian StyleAngelliaume, Sébastien, Xavier Ceamanos, Françoise Viallefont-Robinet, Rémi Baqué, Philippe Déliot, and Véronique Miegebielle. 2017. "Hyperspectral and Radar Airborne Imagery over Controlled Release of Oil at Sea" Sensors 17, no. 8: 1772. https://doi.org/10.3390/s17081772
APA StyleAngelliaume, S., Ceamanos, X., Viallefont-Robinet, F., Baqué, R., Déliot, P., & Miegebielle, V. (2017). Hyperspectral and Radar Airborne Imagery over Controlled Release of Oil at Sea. Sensors, 17(8), 1772. https://doi.org/10.3390/s17081772