Symbiotic Navigation in Multi-Robot Systems with Remote Obstacle Knowledge Sharing


Abstract
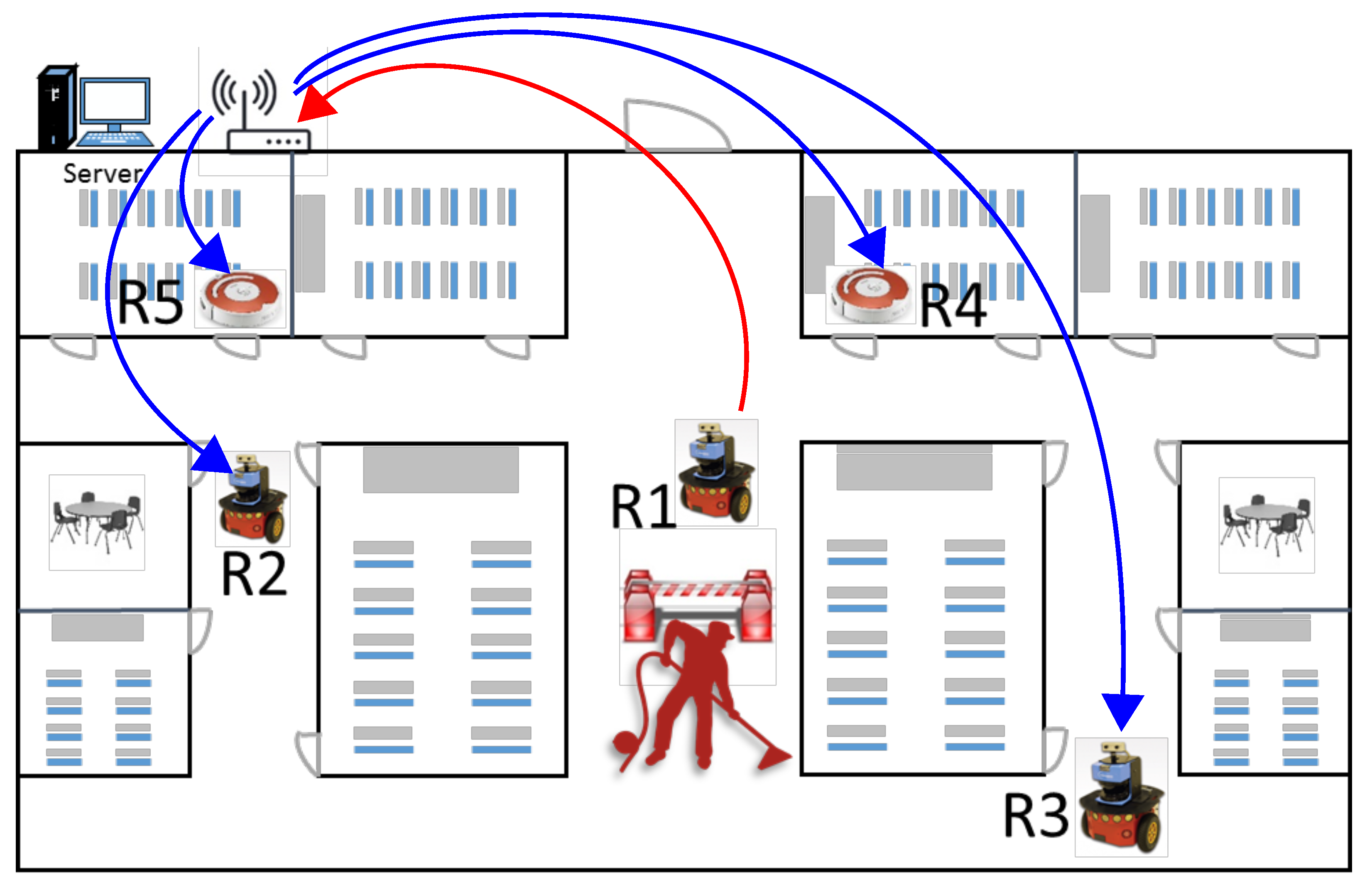
:1. Introduction
State of the Art
2. Node Representation with Obstacle Information and Path Planning
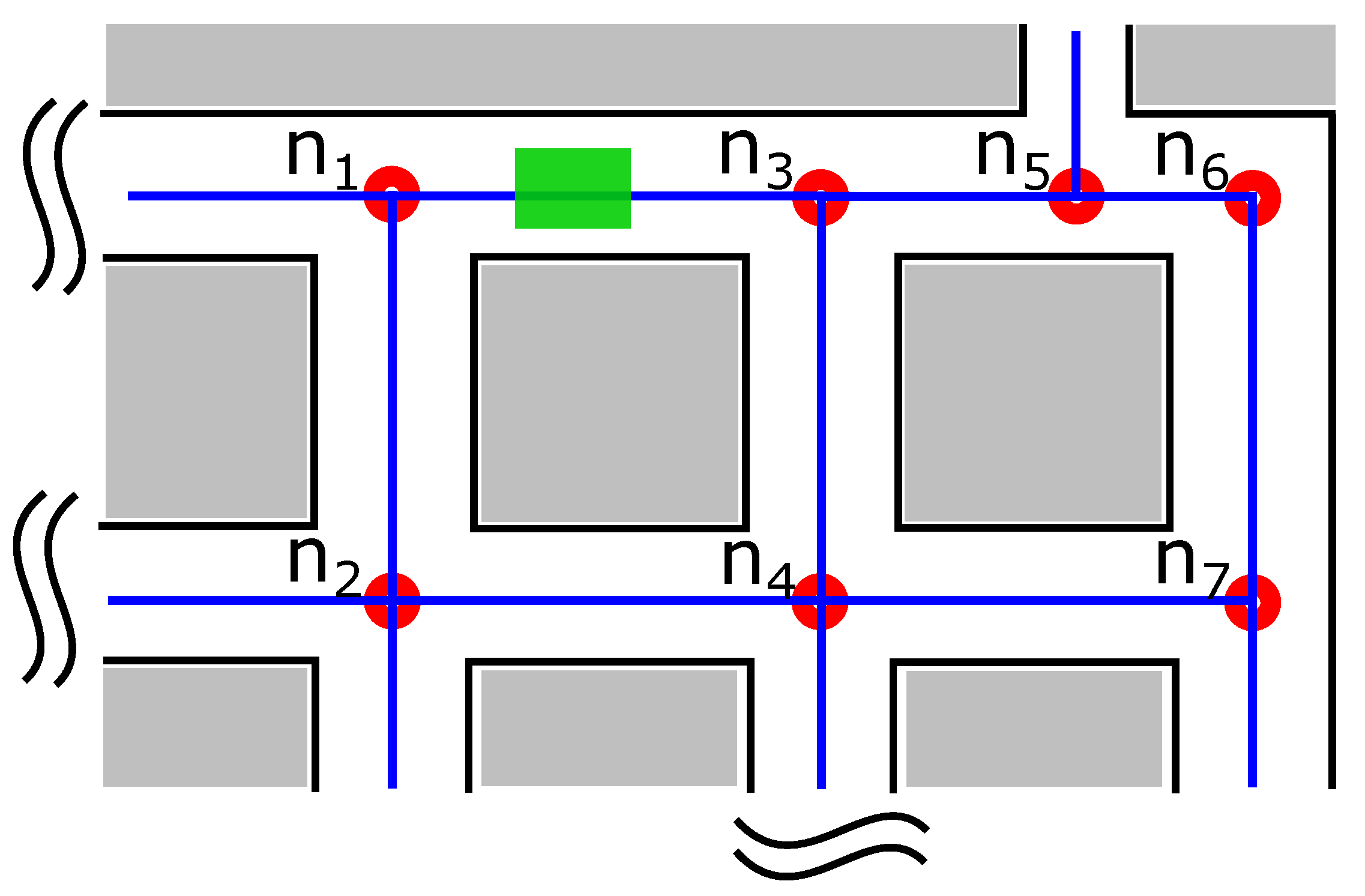
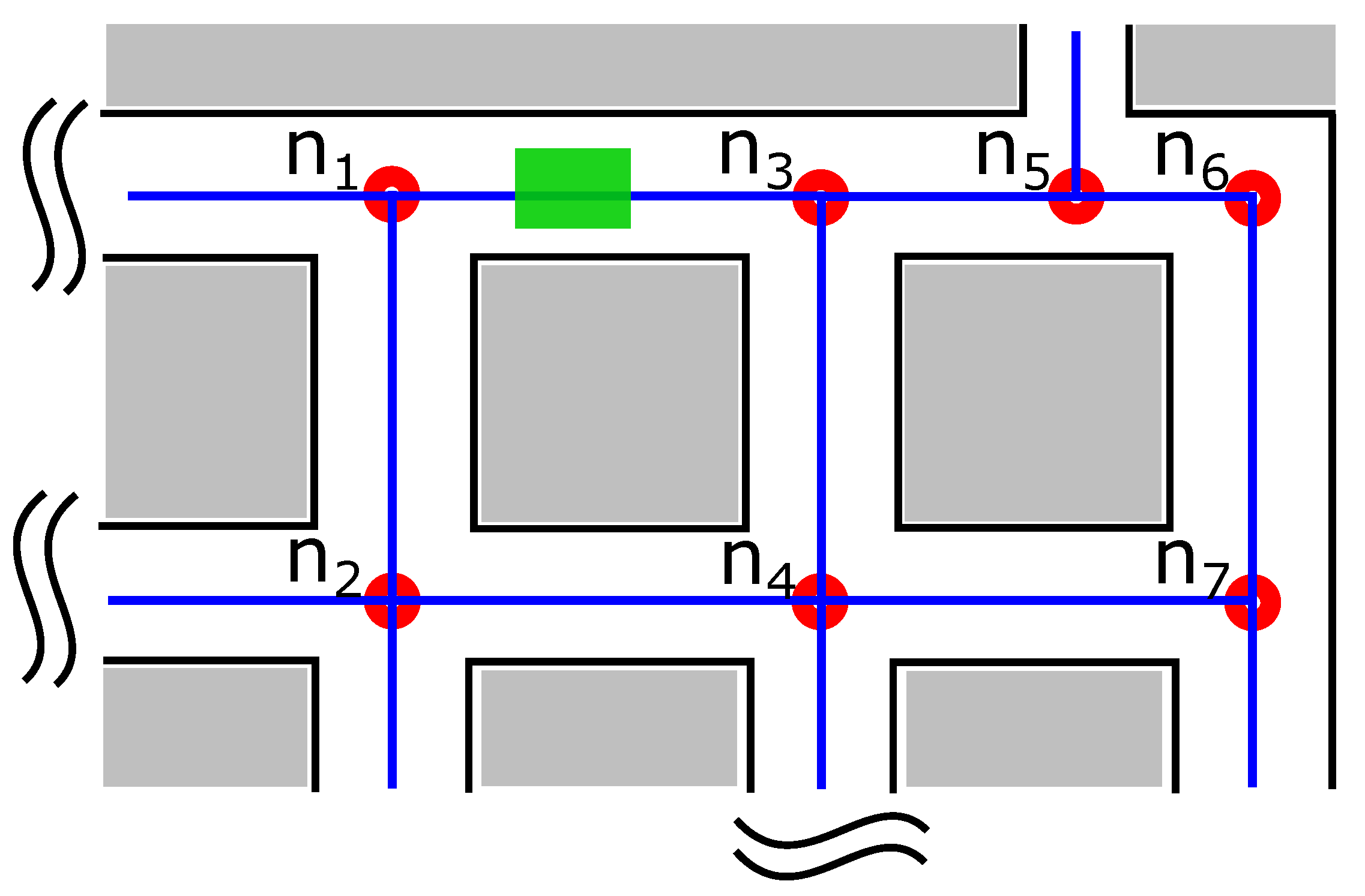
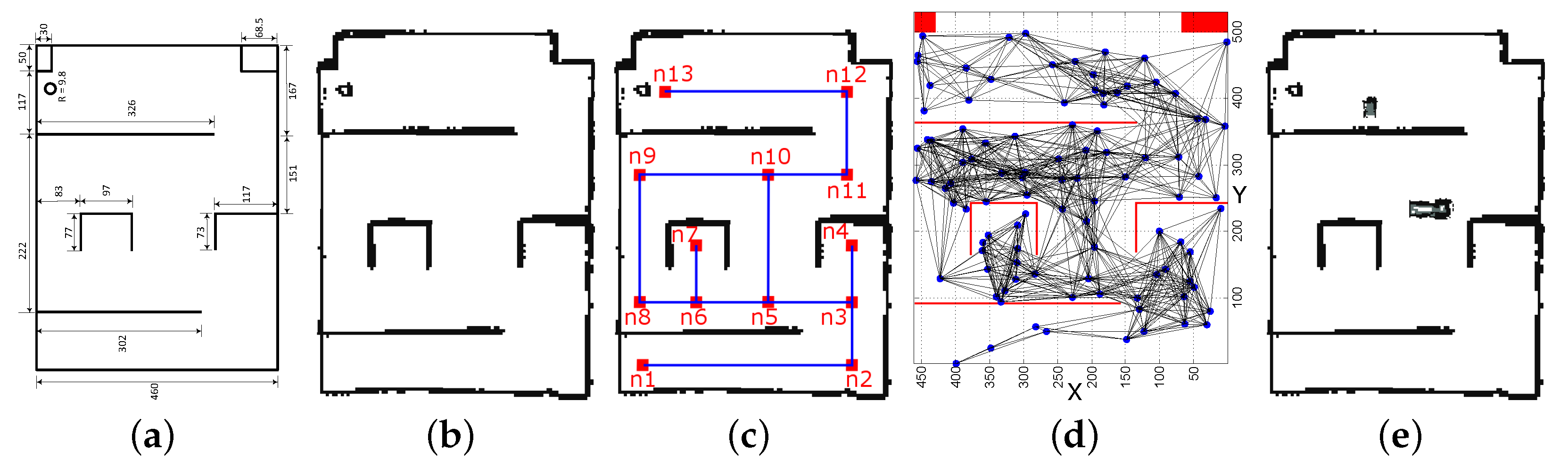
2.1. Node Map and Obstacle Information
- Correspondence Problem: Different robots may have built their maps from different starting locations. Therefore, a particular location localized by one robot (say ) might correspond to a different location for another robot (say ). Although there are techniques [42] to find the necessary translation and rotation required to transform one robot’s localized coordinates to another robot’s map coordinates, it takes time which can cause service delays.
- Diversity of Robot Specifications: Different robots may have different types of sensors, software modules, and computation units. One robot may use a grid map while another robot may use a feature based map. Even for same type of sensors, their specifications (like accuracy, range) may vary. These differences make it difficult for the robots to utilize the directly transferred obstacle coordinates in a meaningful way.
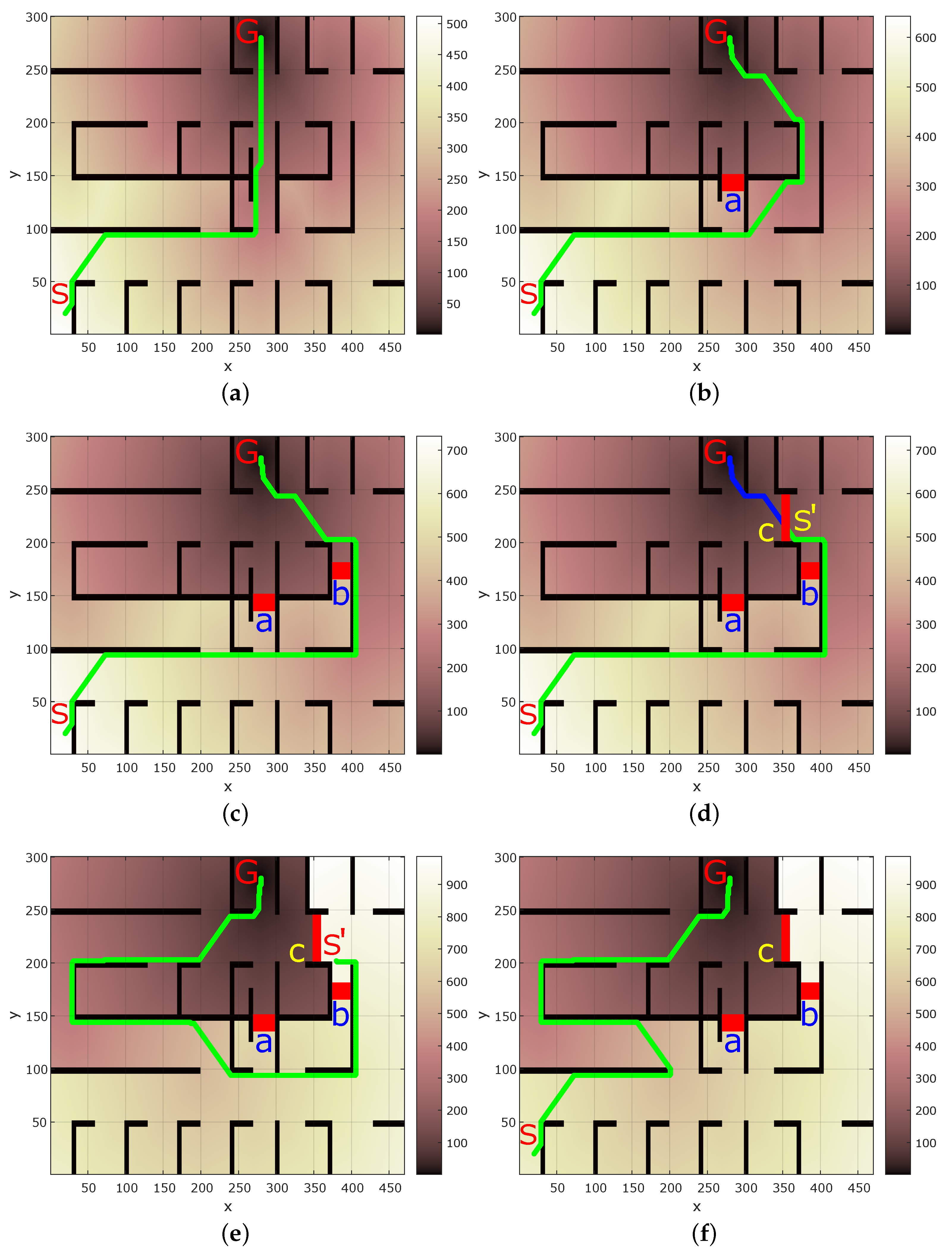
2.2. Path Planning on Node Map
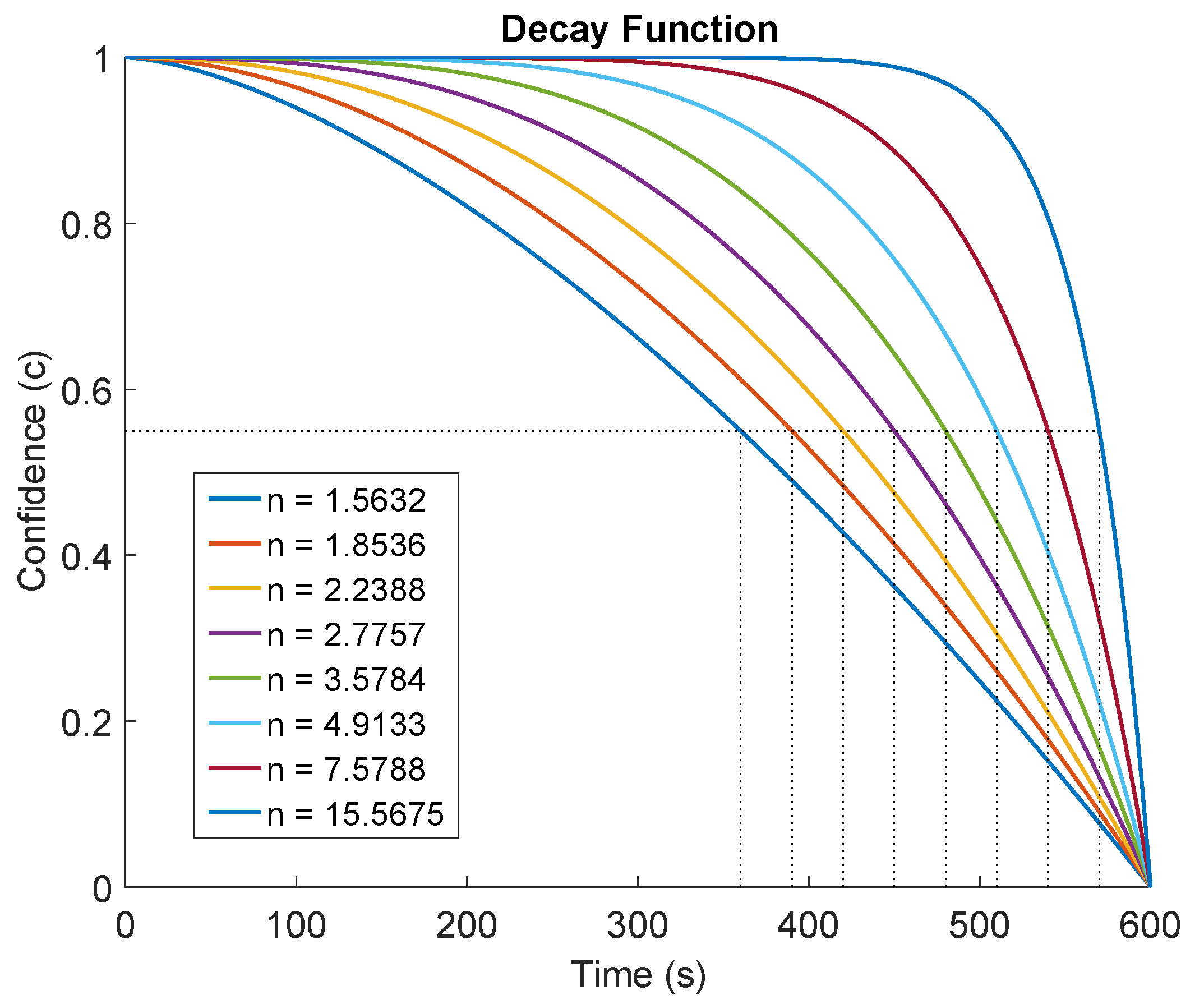
3. Obstacle Removal and Update
- The blocked node . In other words, the current path is not blocked.
- where the set of nodes have already been traversed by the robot.
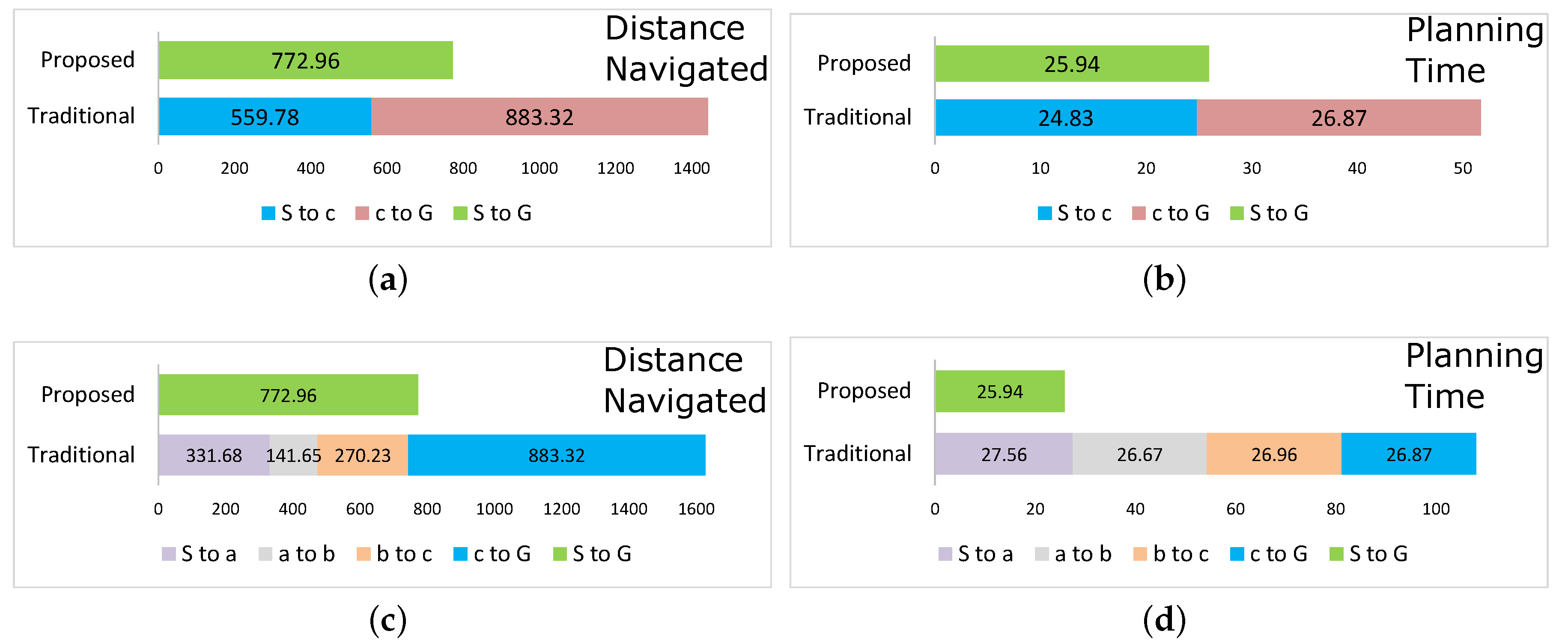
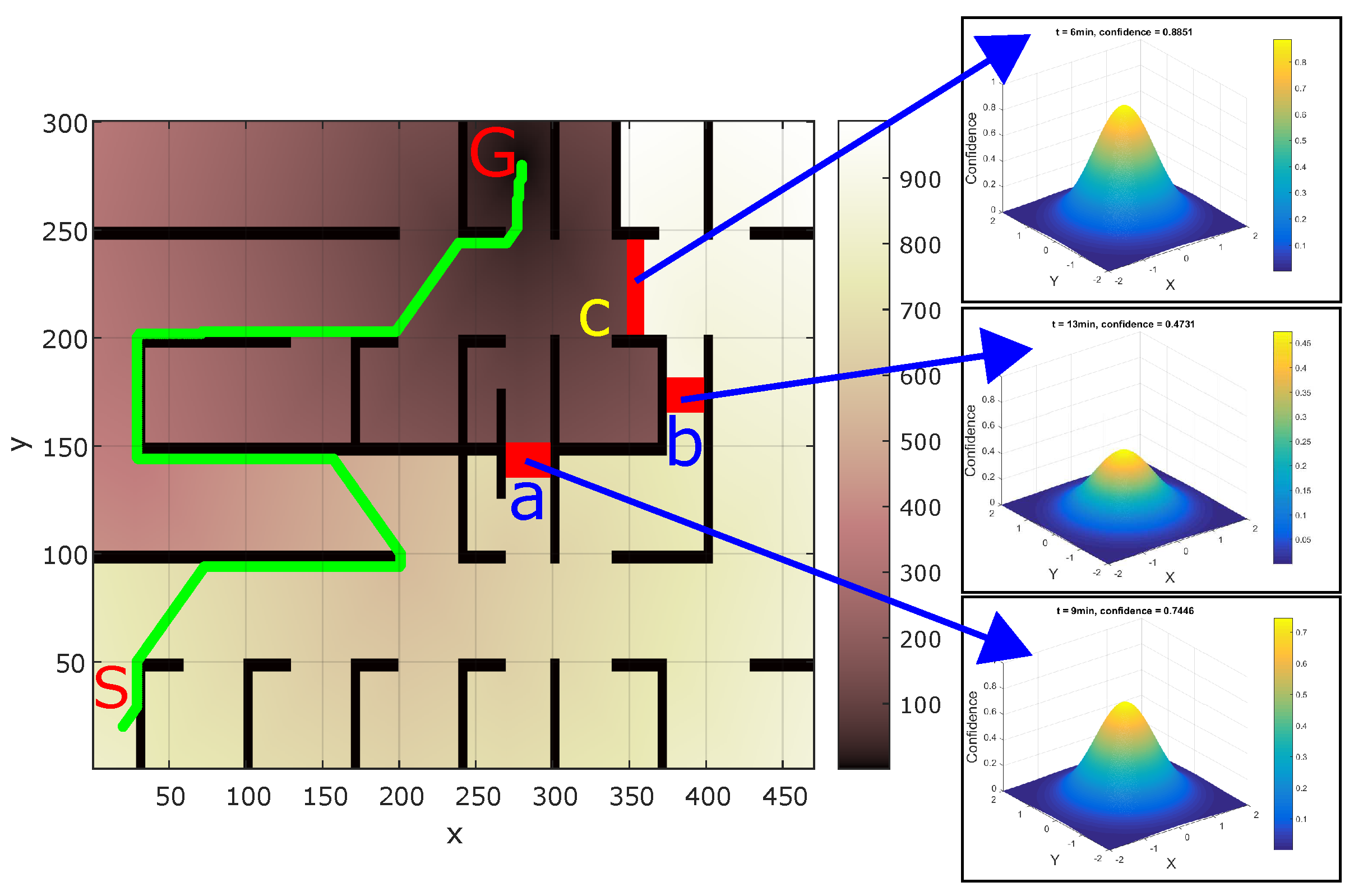
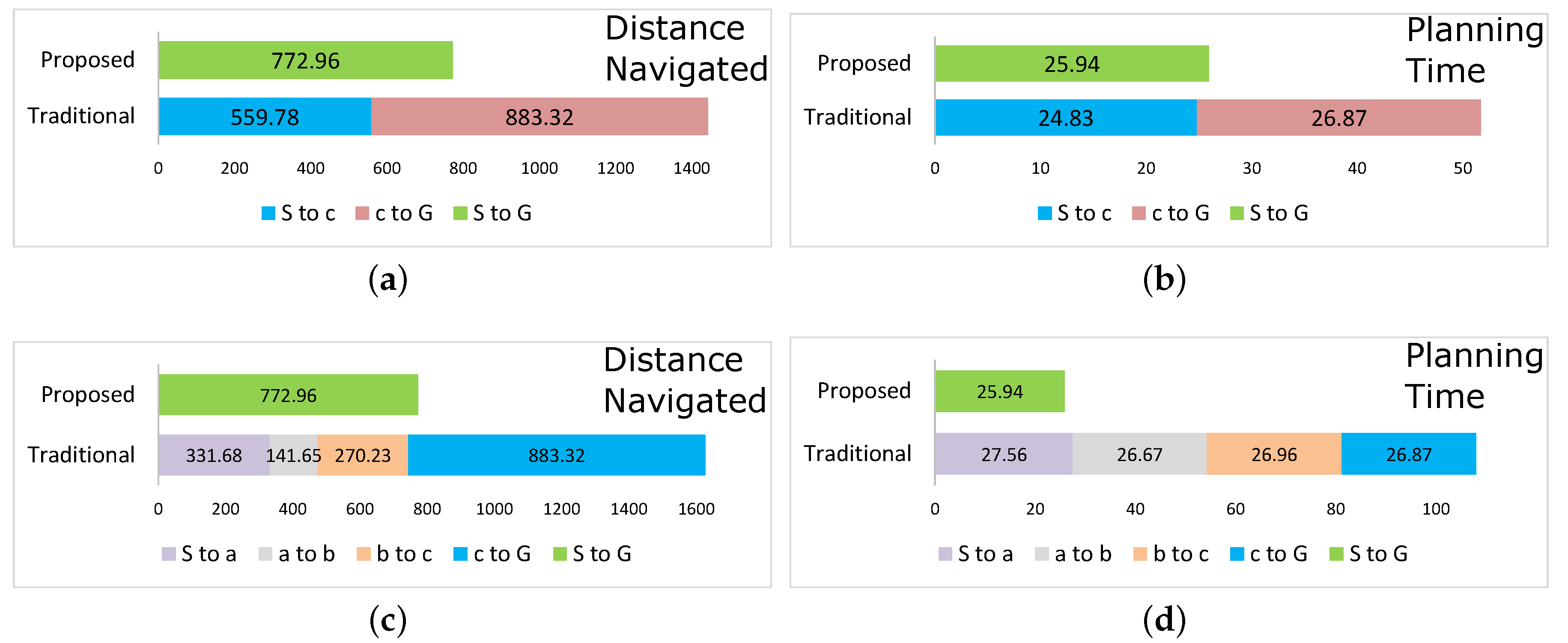
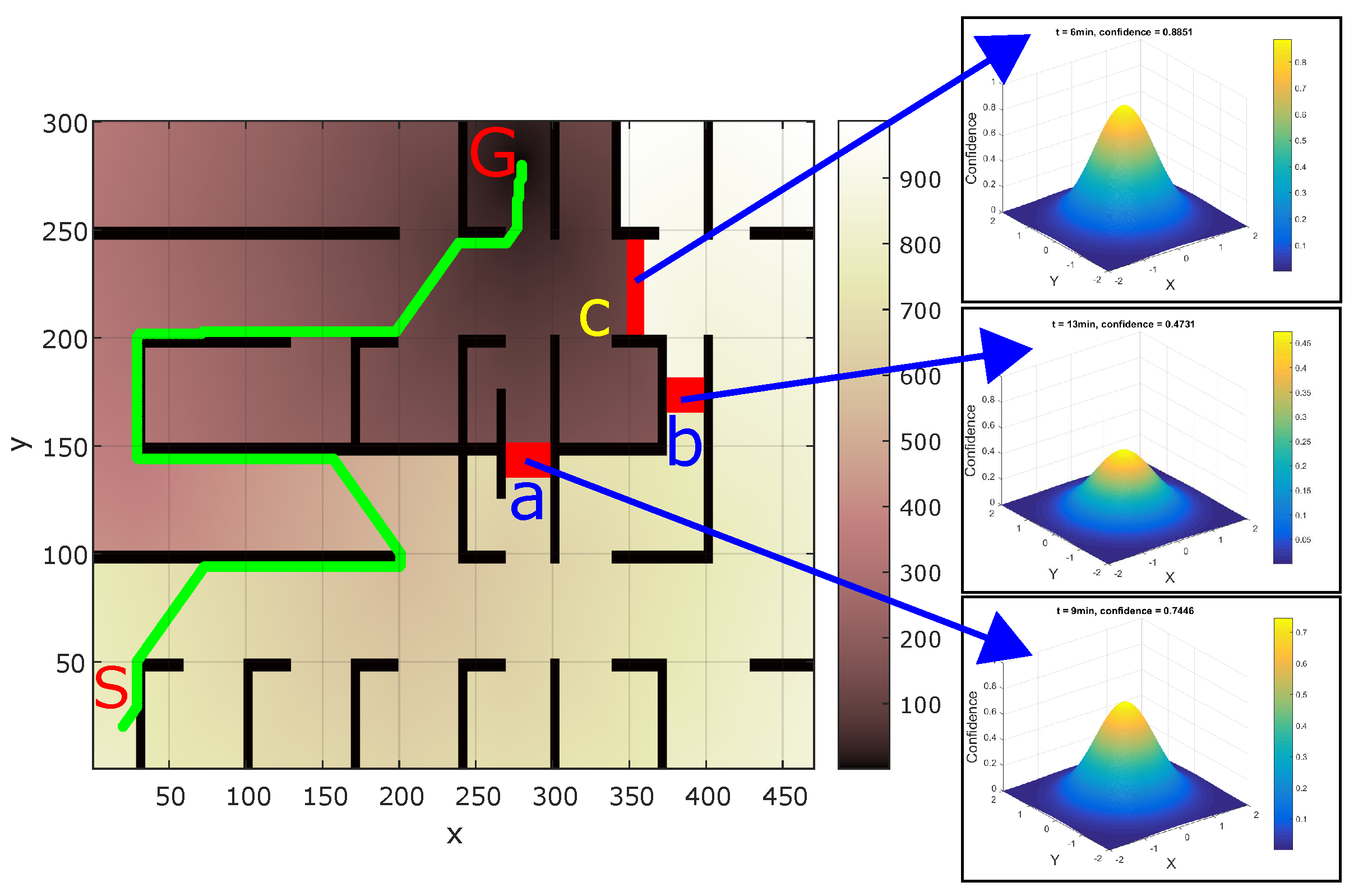
4. Results
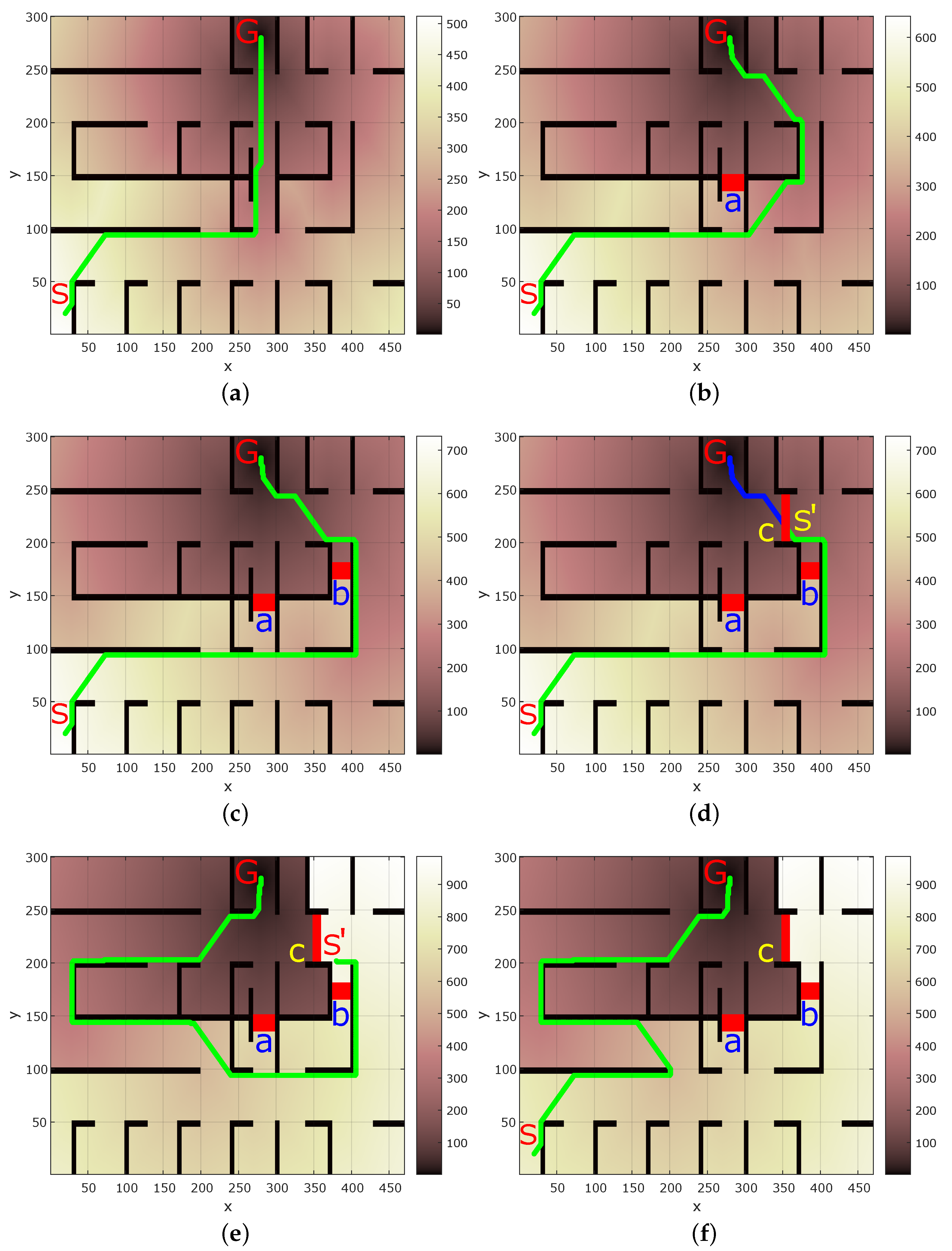
4.1. Results in Simulation Environment
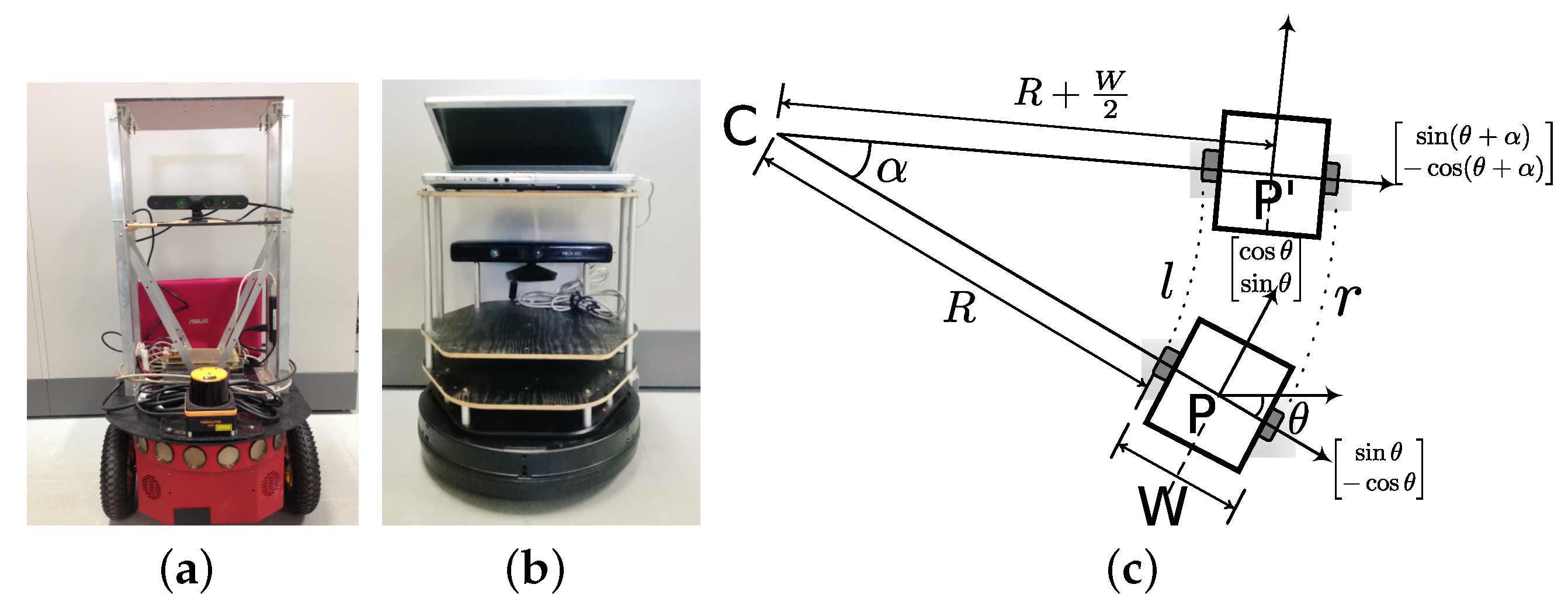
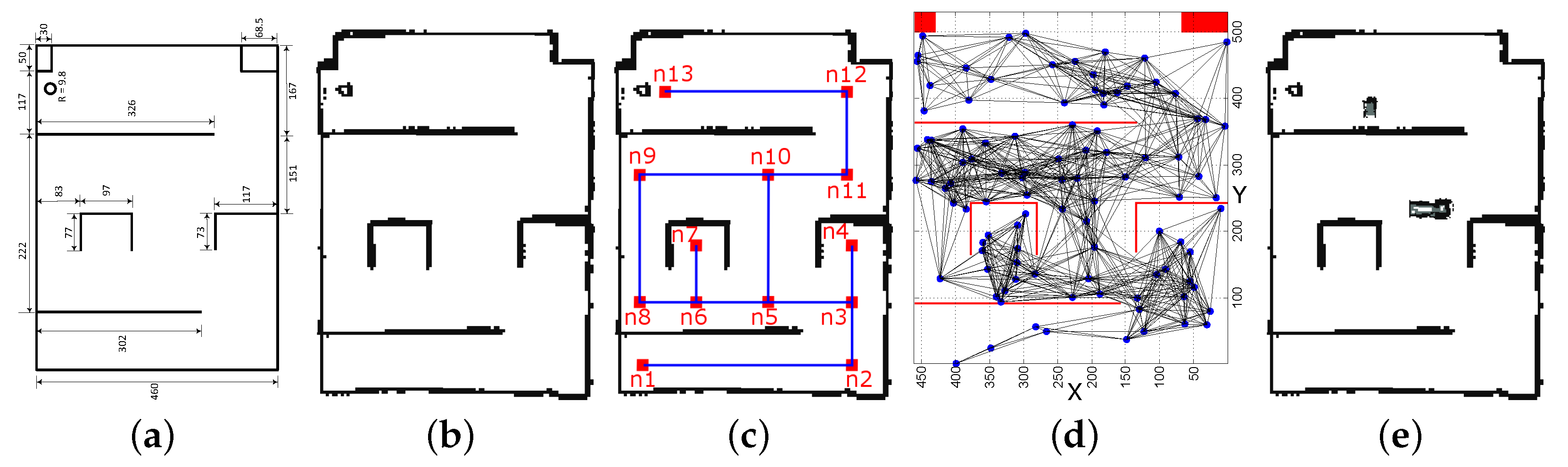
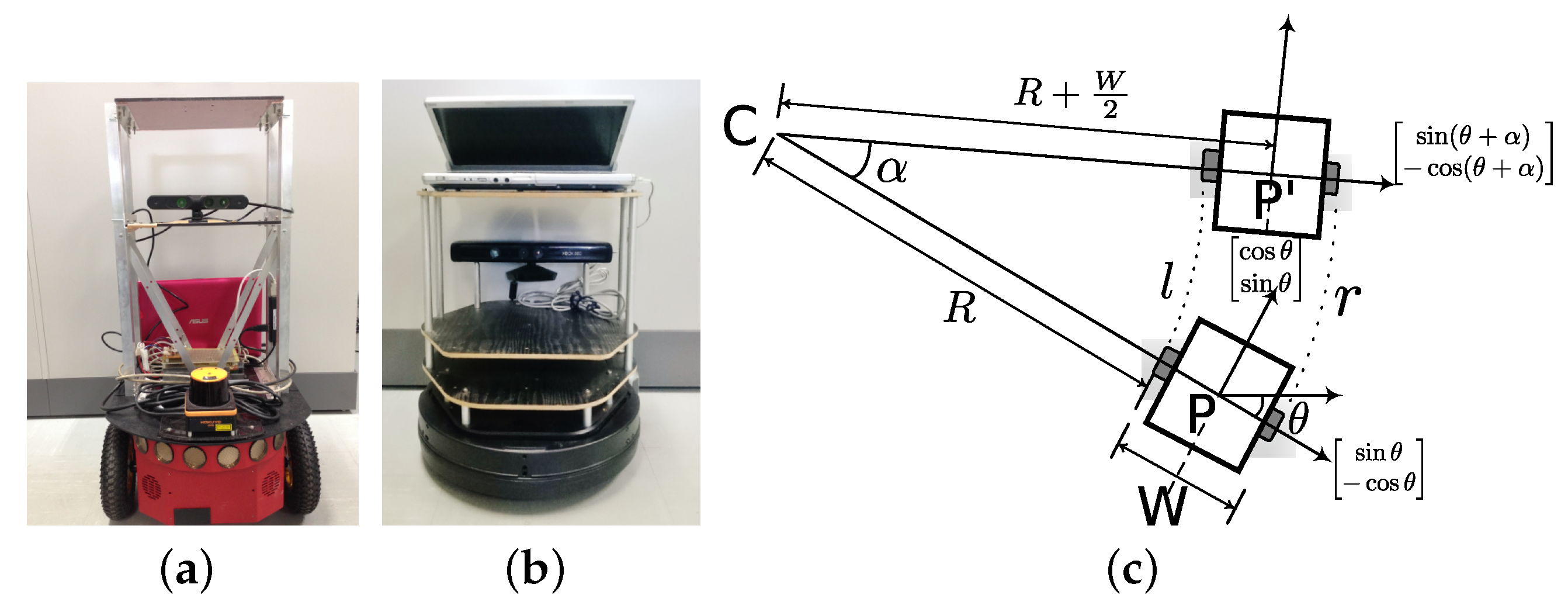
4.2. Results in Real Environment
5. Discussion
6. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| SLAM | Simultaneous Localization and Mapping |
| PRM | Probabilistic Roadmap Planner |
References
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics (Intelligent Robotics and Autonomous Agents); The MIT Press: Cambridge, UK, 2005. [Google Scholar]
- Ravankar, A.A.; Hoshino, Y.; Ravankar, A.; Jixin, L.; Emaru, T.; Kobayashi, Y. Algorithms and a framework for indoor robot mapping in a noisy environment using clustering in spatial and Hough domains. Int. J. Adv. Robot. Syst. 2015, 12, 27. [Google Scholar] [CrossRef]
- Ravankar, A.A.; Hoshino, Y.; Emaru, T.; Kobayashi, Y. Map building from laser range sensor information using mixed data clustering and singular value decomposition in noisy environment. In Proceedings of the 2011 IEEE/SICE International Symposium on System Integration (SII), Kyoto, Japan, 20–22 December 2011; pp. 1232–1238. [Google Scholar]
- Hart, P.; Nilsson, N.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Stentz, A.; Mellon, I.C. Optimal and Efficient Path Planning for Unknown and Dynamic Environments. Int. J. Robot. Autom. 1993, 10, 89–100. [Google Scholar]
- Stentz, A. The Focussed D* Algorithm for Real-Time Replanning. In Proceedings of the International Joint Conference on Artificial Intelligence, Montreal, Canada, 20–25 August 1995; pp. 1652–1659. [Google Scholar]
- Kavraki, L.; Svestka, P.; Latombe, J.C.; Overmars, M. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Trans. Robot. Autom. 1996, 12, 566–580. [Google Scholar] [CrossRef]
- Lavalle, S.M. Rapidly-Exploring Random Trees: A New Tool for Path Planning; Technical Report; Iowa State University: Ames, IA, USA, 1998. [Google Scholar]
- LaValle, S.M.; Kuffner, J.J. Randomized Kinodynamic Planning. Int. J. Robot. Res. 2001, 20, 378–400. [Google Scholar] [CrossRef]
- Hwang, Y.; Ahuja, N. A potential field approach to path planning. IEEE Trans. Robot. Autom. 1992, 8, 23–32. [Google Scholar] [CrossRef]
- Delling, D.; Sanders, P.; Schultes, D.; Wagner, D. Engineering Route Planning Algorithms. In Algorithmics of Large and Complex Networks; Lerner, J., Wagner, D., Zweig, K., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2009; Volume 5515, pp. 117–139. [Google Scholar]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006; Available online: http://planning.cs.uiuc.edu/ (accessed on 5 July 2017).
- Latombe, J.C. Robot Motion Planning; Kluwer Academic Publishers: Norwell, MA, USA, 1991. [Google Scholar]
- Svestka, P.; Overmars, M.H. Coordinated Path Planning for Multiple Robots; Technical Report UU-CS-1996-43; Department of Information and Computing Sciences, Utrecht University: Utrecht, The Netherlands, 1996. [Google Scholar]
- Guo, Y.; Parker, L. A distributed and optimal motion planning approach for multiple mobile robots. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (ICRA’02), Washington, DC, USA, 11–15 May 2002; Volume 3, pp. 2612–2619. [Google Scholar]
- Pinkam, N.; Bonnet, F.; Chong, N.Y. Robot collaboration in warehouse. In Proceedings of the 2016 16th International Conference on Control, Automation and Systems (ICCAS), Gyeongju, Korea, 16–19 October 2016; pp. 269–272. [Google Scholar]
- Stenzel, J.; Luensch, D. Concept of decentralized cooperative path conflict resolution for heterogeneous mobile robots. In Proceedings of the 2016 IEEE International Conference on Automation Science and Engineering (CASE), Fort Worth, TX, USA, 21–25 August 2016; pp. 715–720. [Google Scholar]
- Regev, T.; Indelman, V. Multi-robot decentralized belief space planning in unknown environments via efficient re-evaluation of impacted paths. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 5591–5598. [Google Scholar]
- Gasparetto, A.; Boscariol, P.; Lanzutti, A.; Vidoni, R. Path Planning and Trajectory Planning Algorithms: A General Overview. In Motion and Operation Planning of Robotic Systems: Background and Practical Approaches; Carbone, G., Gomez-Bravo, F., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 3–27. [Google Scholar]
- Tang, S.H.; Kamil, F.; Khaksar, W.; Zulkifli, N.; Ahmad, S.A. Robotic motion planning in unknown dynamic environments: Existing approaches and challenges. In Proceedings of the 2015 IEEE International Symposium on Robotics and Intelligent Sensors (IRIS), Langkawi, Malaysia, 18–20 October 2015; pp. 288–294. [Google Scholar]
- Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Emaru, T. Intelligent Robot Guidance in Fixed External Camera Network for Navigation in Crowded and Narrow Passages. In Proceedings of the 3rd International Electronic Conference on Sensors and Applications, 15–30 November 2016; Volume 3. [Google Scholar]
- Yi, C.; Min, H.; Luo, R. Affordance matching from the shared information in multi-robot. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015; pp. 66–71. [Google Scholar]
- Wang, R.; Veloso, M.; Seshan, S. Multi-robot information sharing for complementing limited perception: A case study of moving ball interception. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 1884–1889. [Google Scholar]
- Riddle, D.R.; Murphy, R.R.; Burke, J.L. Robot-assisted medical reachback: using shared visual information. In Proceedings of the IEEE International Workshop on Robot and Human Interactive Communication (ROMAN 2005), Nashville, TN, USA, 13–15 August 2005; pp. 635–642. [Google Scholar]
- Cai, A.; Fukuda, T.; Arai, F. Cooperation of multiple robots in cellular robotic system based on information sharing. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Tokyo, Japan, 20–20 June 1997; p. 20. [Google Scholar]
- Rokunuzzaman, M.; Umeda, T.; Sekiyama, K.; Fukuda, T. A Region of Interest (ROI) Sharing Protocol for Multirobot Cooperation With Distributed Sensing Based on Semantic Stability. IEEE Trans. Syst. Man Cybern. Syst. 2014, 44, 457–467. [Google Scholar] [CrossRef]
- Samejima, S.; Sekiyama, K. Multi-robot visual support system by adaptive ROI selection based on gestalt perception. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3471–3476. [Google Scholar]
- Özkucur, N.E.; Kurt, B.; Akın, H.L. A Collaborative Multi-robot Localization Method without Robot Identification. In RoboCup 2008: Robot Soccer World Cup XII; Iocchi, L., Matsubara, H., Weitzenfeld, A., Zhou, C., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 189–199. [Google Scholar]
- Sukop, M.; Hajduk, M.; Jánoš, R. Strategic behavior of the group of mobile robots for robosoccer (category Mirosot). In Proceedings of the 2014 23rd International Conference on Robotics in Alpe-Adria-Danube Region (RAAD), Smolenice, Slovakia, 3–5 September 2014; pp. 1–5. [Google Scholar]
- Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Emaru, T. Avoiding blind leading the blind: Uncertainty integration in virtual pheromone deposition by robots. Int. J. Adv. Robot. Syst. 2016, 13. [Google Scholar] [CrossRef]
- Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Jixin, L.; Emaru, T.; Hoshino, Y. An intelligent docking station manager for multiple mobile service robots. In Proceedings of the 2015 15th International Conference on Control, Automation and Systems (ICCAS), Busan, Korea, 13–16 October 2015; pp. 72–78. [Google Scholar]
- Miskowicz, M. Event-Based Control and Signal Processing (Embedded Systems); CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Hussain, A.M. Multisensor distributed sequential detection. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 698–708. [Google Scholar] [CrossRef]
- Yılmaz, Y.; Moustakides, G.V.; Wang, X.; Hero, A.O. Event-Based Statistical Signal Processing. In Event-Based Control and Signal Processing; CRC Press: Boca Raton, FL, USA, 2015; p. 457. [Google Scholar]
- Socas, R.; Dormido, S.; Dormido, R.; Fabregas, E. Event-Based Control Strategy for Mobile Robots in Wireless Environments. Sensors 2015, 15, 30076–30092. [Google Scholar] [CrossRef] [PubMed]
- Diaz-Cacho, M.; Delgado, E.; Barreiro, A.; Falcón, P. Basic Send-on-Delta Sampling for Signal Tracking-Error Reduction. Sensors 2017, 17, 312. [Google Scholar] [CrossRef] [PubMed]
- Miskowicz, M. Send-On-Delta Concept: An Event-Based Data Reporting Strategy. Sensors 2006, 6, 49–63. [Google Scholar] [CrossRef]
- Marín, L.; Vallés, M.; Soriano, Á.; Valera, Á.; Albertos, P. Multi Sensor Fusion Framework for Indoor-Outdoor Localization of Limited Resource Mobile Robots. Sensors 2013, 13, 14133–14160. [Google Scholar] [CrossRef] [PubMed]
- Guinaldo, M.; Fábregas, E.; Farias, G.; Dormido-Canto, S.; Chaos, D.; Sánchez, J.; Dormido, S. A Mobile Robots Experimental Environment with Event-Based Wireless Communication. Sensors 2013, 13, 9396–9413. [Google Scholar] [CrossRef] [PubMed]
- Mahmoud, M.S.; Sabih, M. Networked event-triggered control: An introduction and research trends. Int. J. Gen. Syst. 2014, 43, 810–827. [Google Scholar] [CrossRef]
- Ravankar, A.; Ravankar, A.A.; Hoshino, Y.; Emaru, T.; Kobayashi, Y. On a Hopping-points SVD and Hough Transform Based Line Detection Algorithm for Robot Localization and Mapping. Int. J. Adv. Robot. Syst. 2016, 13, 98. [Google Scholar] [CrossRef]
- Montijano, E.; Aragues, R.; Sagüés, C. Distributed Data Association in Robotic Networks With Cameras and Limited Communications. IEEE Trans. Robot. 2013, 29, 1408–1423. [Google Scholar] [CrossRef]
- Corke, P. Robotics, Vision and Control: Fundamental Algorithms in Matlab; Springer: New York, NY, USA, 2011; Volume 73. [Google Scholar] [CrossRef]
- Pioneer P3-DX Robot. Available online: http://www.mobilerobots.com/ResearchRobots/PioneerP3DX.aspx (accessed on 5 July 2017).
- TurtleBot 2 Robot. Available online: http://turtlebot.com/ (accessed on 10 May 2017).
- Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Emaru, T. SHP: Smooth Hypocycloidal Paths with Collision-Free and Decoupled Multi-Robot Path Planning. Int. J. Adv. Robot. Syst. 2016, 13, 133. [Google Scholar] [CrossRef]
- Quigley, M.; Conley, K.; Gerkey, B.P.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. Proceedings of ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009. [Google Scholar]
- Blanco, J.L.; Jimenez, J.G.; Fernandez-Madrigal, J.A. A robust, multi-hypothesis approach to matching occupancy grid maps. Robotica 2013, 31, 687–701. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Obstacle 1 | Obstacle 2 | ||||
|---|---|---|---|---|---|
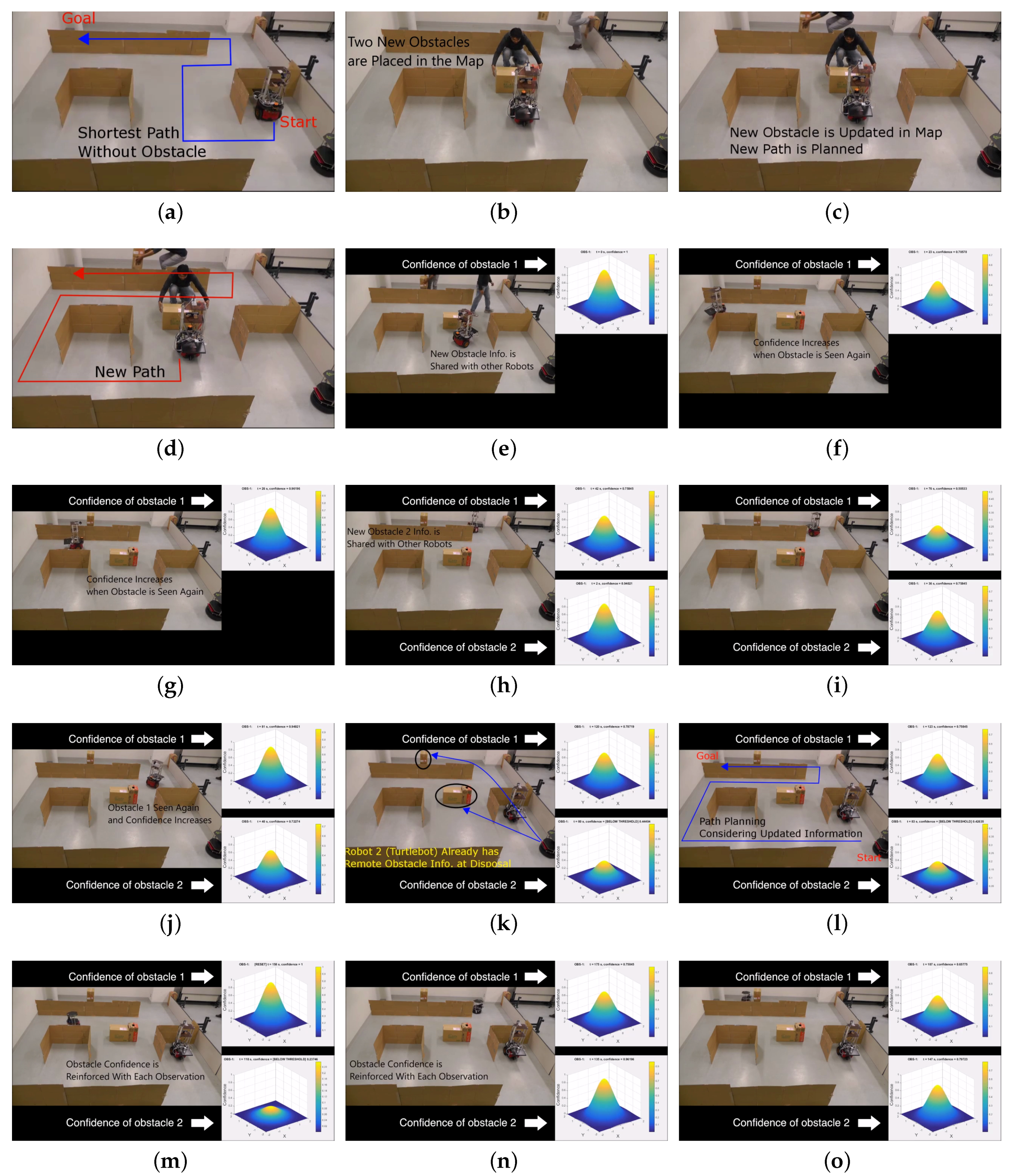
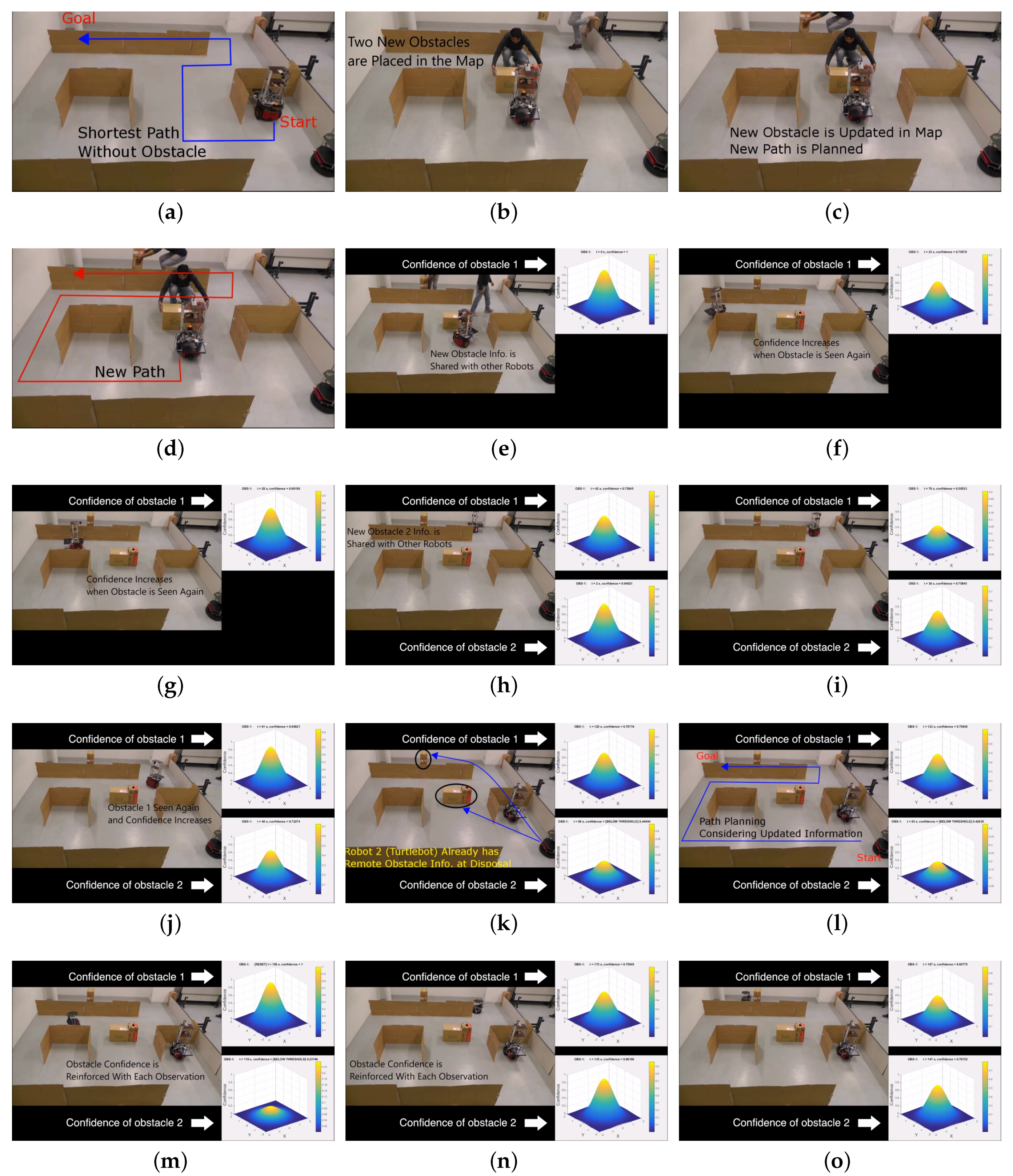
| Figure | Time (s) | Confidence | Time (s) | Confidence | Remark |
| Figure 9e | 0 | 1.00 | − | − | Obs.1 observed |
| Figure 9f | 23 | 0.70 | − | − | − |
| Figure 9g | 25 | 0.96 | − | − | Obs.1 confidence reset |
| Figure 9h | 42 | 0.75 | 2 | 0.94 | Obs.2 observed |
| Figure 9i | 76 | 0.50 | 35 | 0.75 | − |
| Figure 9j | 81 | 0.94 | 40 | 0.72 | Obs.1 confidence reset |
| Figure 9k | 120 | 0.78 | 80 | 0.44 | − |
| Figure 9l | 123 | 0.75 | 83 | 0.42 | − |
| Figure 9m | 158 | 1.00 | 118 | 0.23 | Obs.1 confidence reset |
| Figure 9n | 175 | 0.75 | 135 | 0.96 | Obs.2 confidence reset |
| Figure 9o | 187 | 0.65 | 147 | 0.79 | − |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Emaru, T. Symbiotic Navigation in Multi-Robot Systems with Remote Obstacle Knowledge Sharing. Sensors 2017, 17, 1581. https://doi.org/10.3390/s17071581
Ravankar A, Ravankar AA, Kobayashi Y, Emaru T. Symbiotic Navigation in Multi-Robot Systems with Remote Obstacle Knowledge Sharing. Sensors. 2017; 17(7):1581. https://doi.org/10.3390/s17071581
Chicago/Turabian StyleRavankar, Abhijeet, Ankit A. Ravankar, Yukinori Kobayashi, and Takanori Emaru. 2017. "Symbiotic Navigation in Multi-Robot Systems with Remote Obstacle Knowledge Sharing" Sensors 17, no. 7: 1581. https://doi.org/10.3390/s17071581
APA StyleRavankar, A., Ravankar, A. A., Kobayashi, Y., & Emaru, T. (2017). Symbiotic Navigation in Multi-Robot Systems with Remote Obstacle Knowledge Sharing. Sensors, 17(7), 1581. https://doi.org/10.3390/s17071581