Characterization of Signal Quality Monitoring Techniques for Multipath Detection in GNSS Applications


Abstract
:1. Introduction
2. Signal Model
3. SQM Metrics
4. Characterization and Performance Analysis
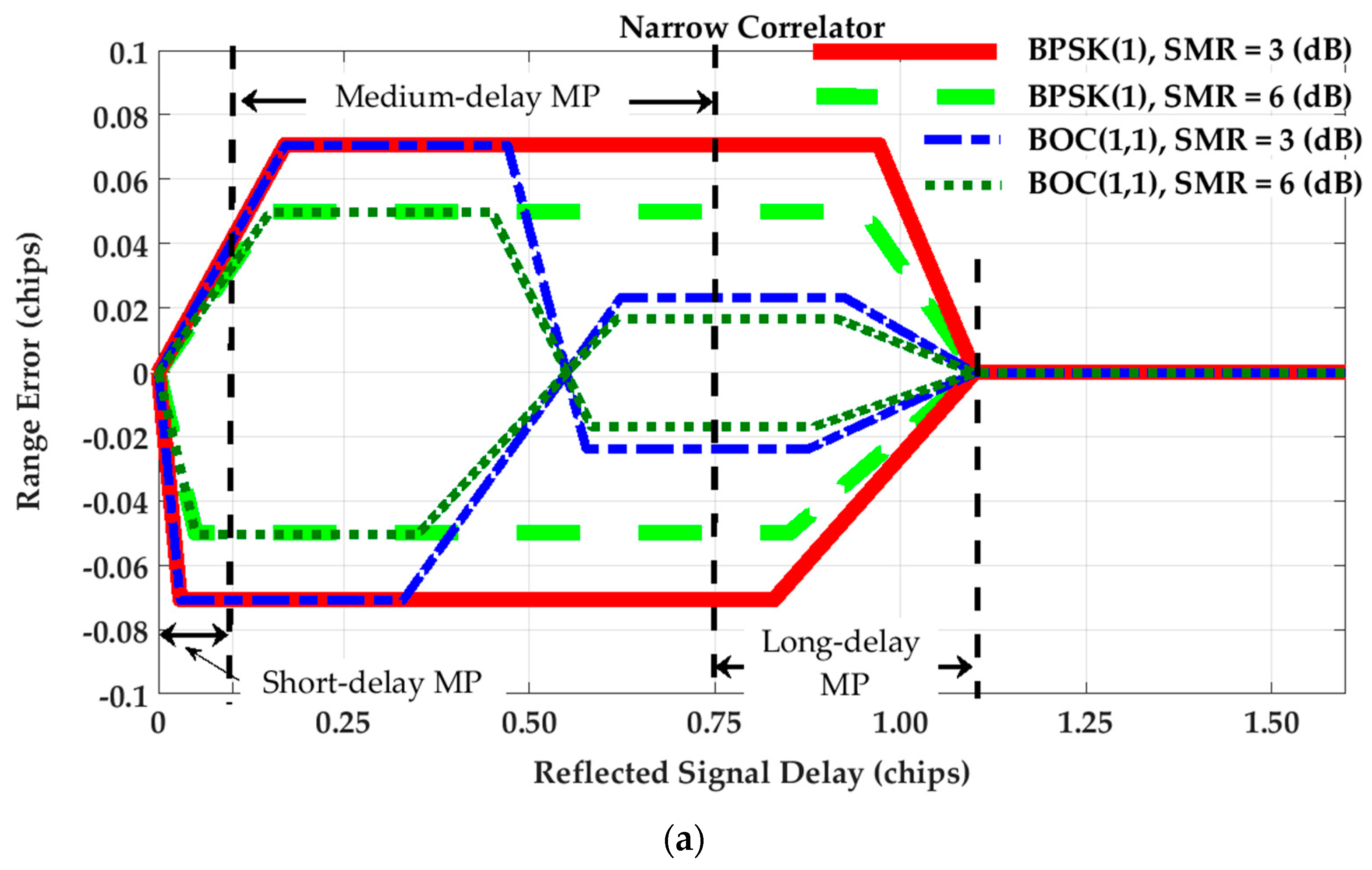
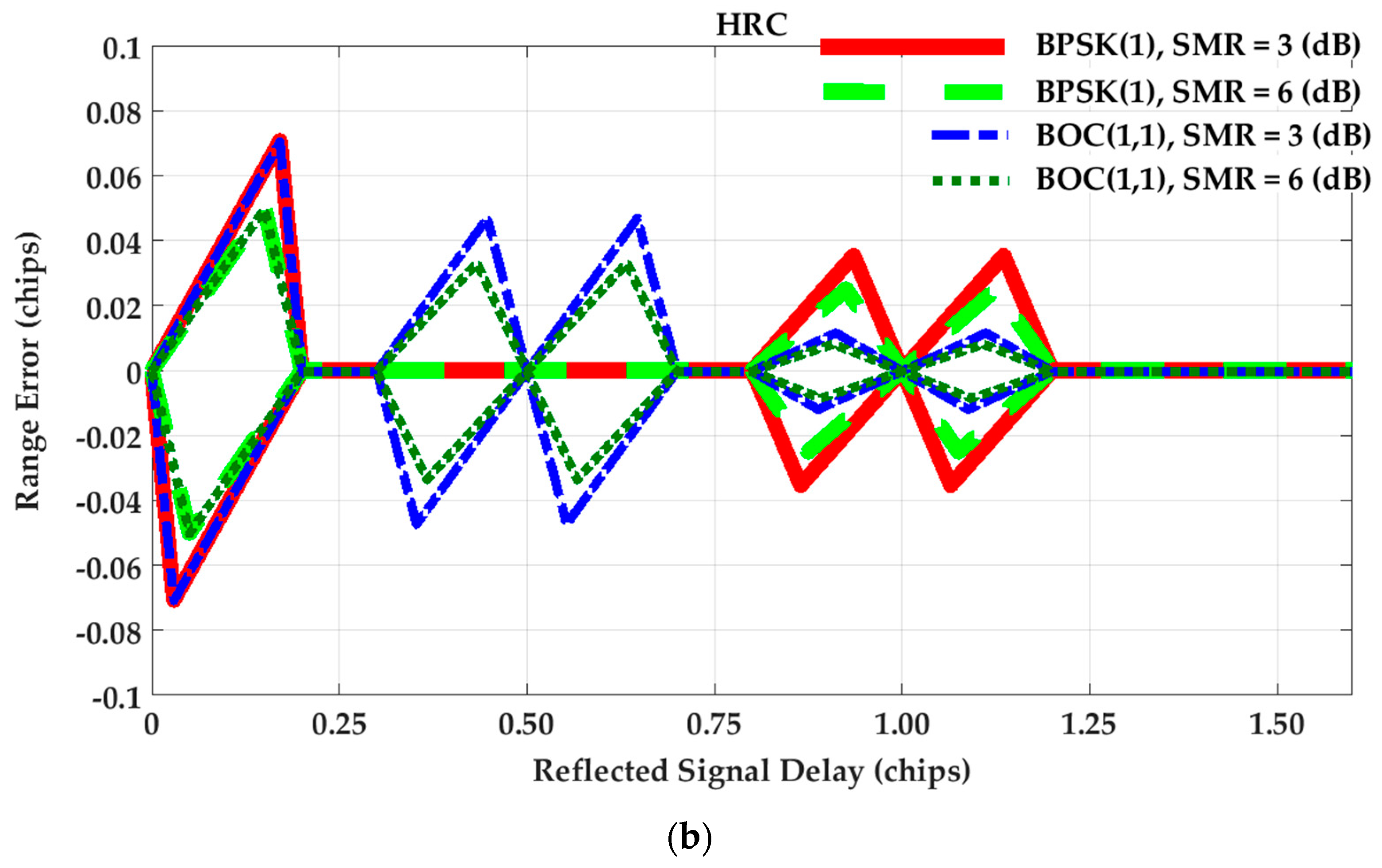
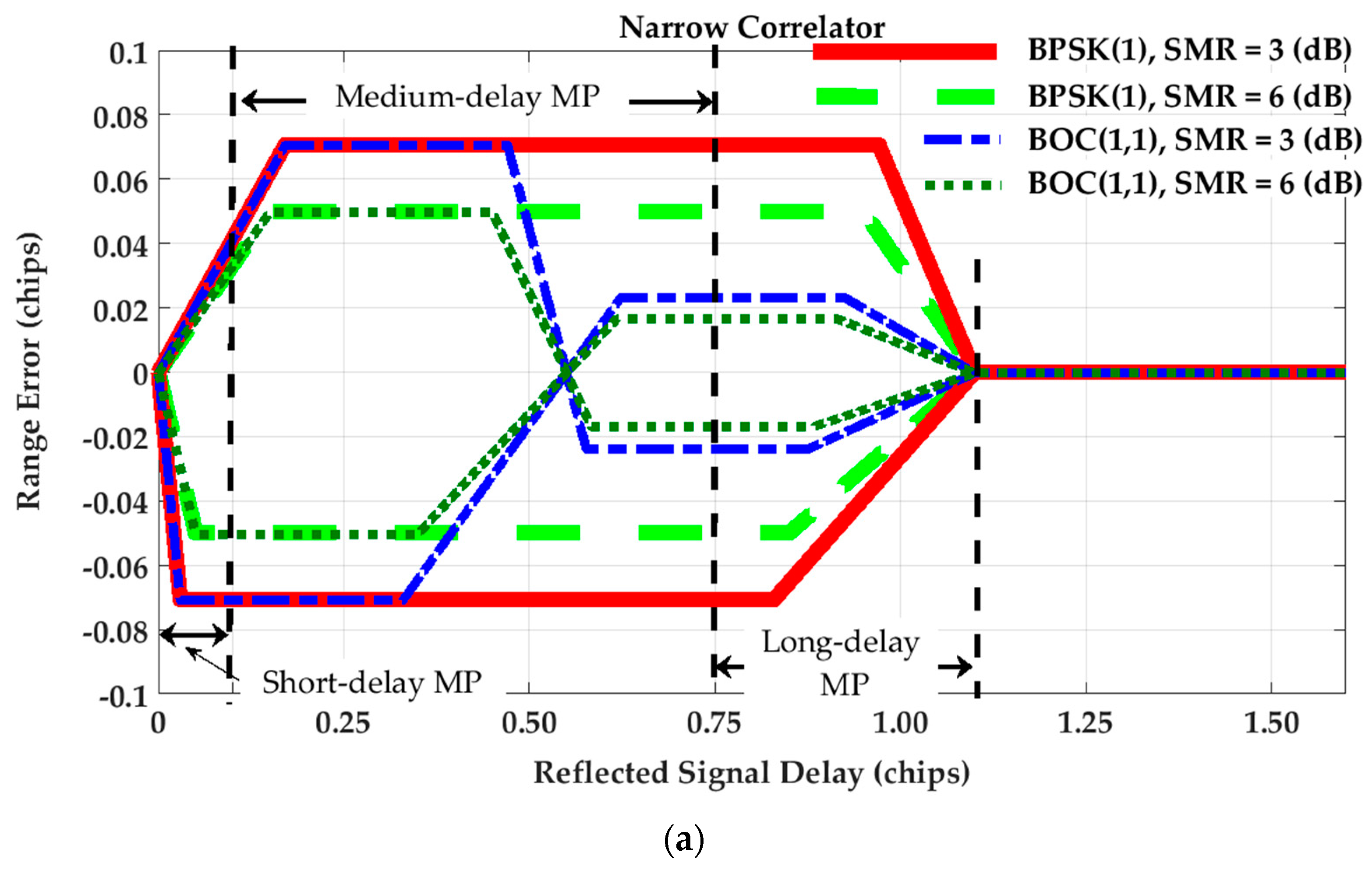
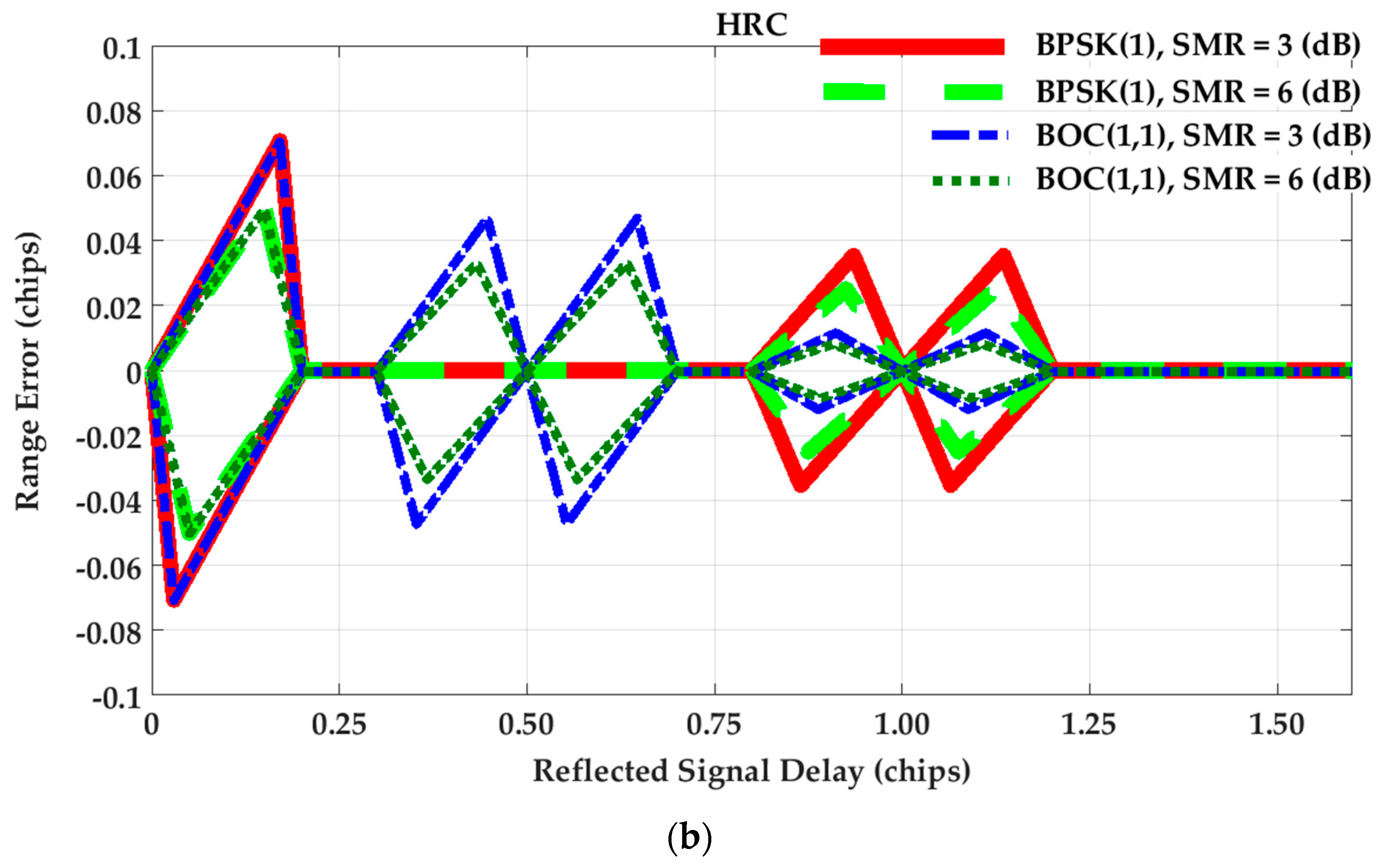
4.1. Multipath Rang Error Envelopes
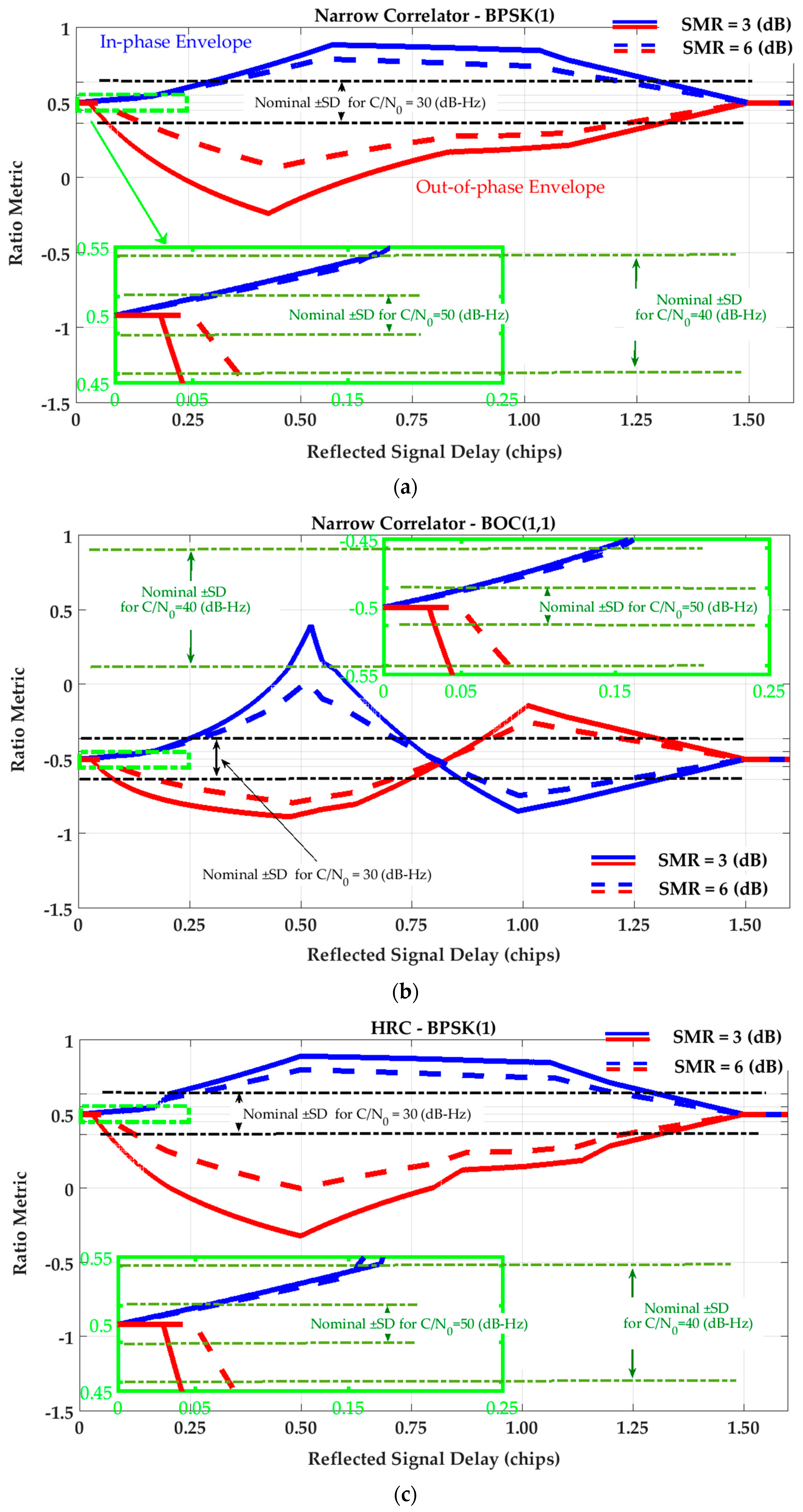
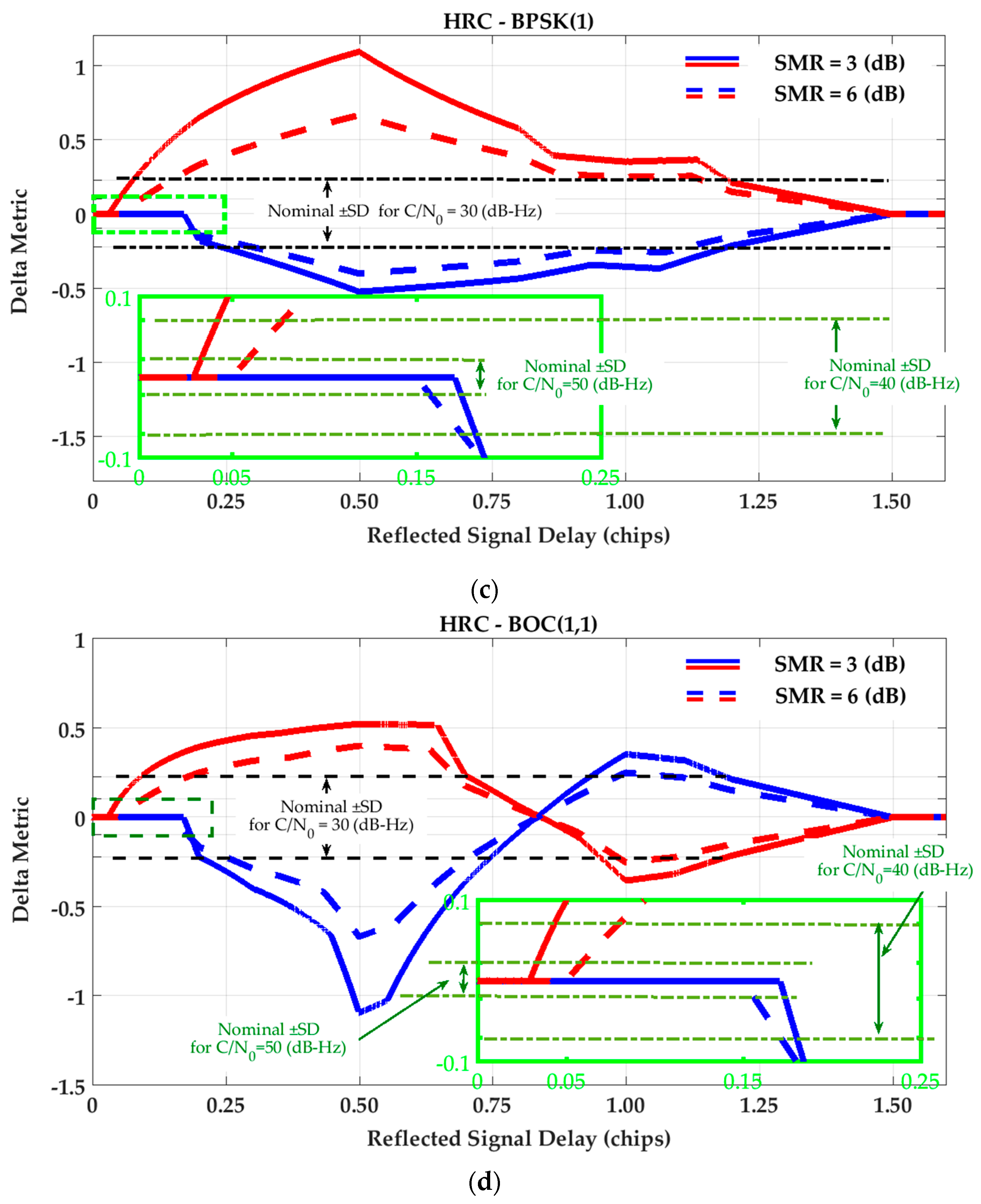
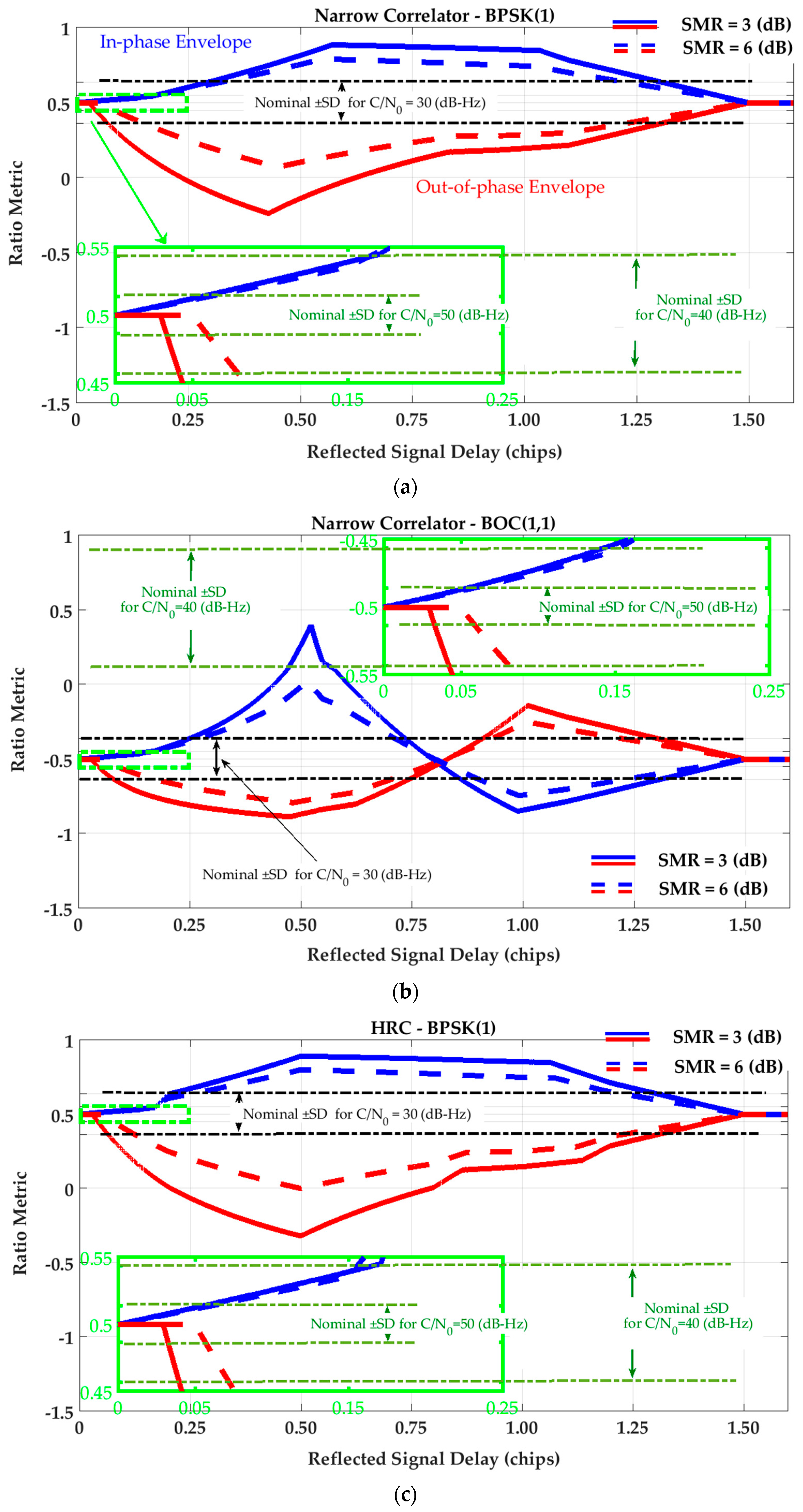
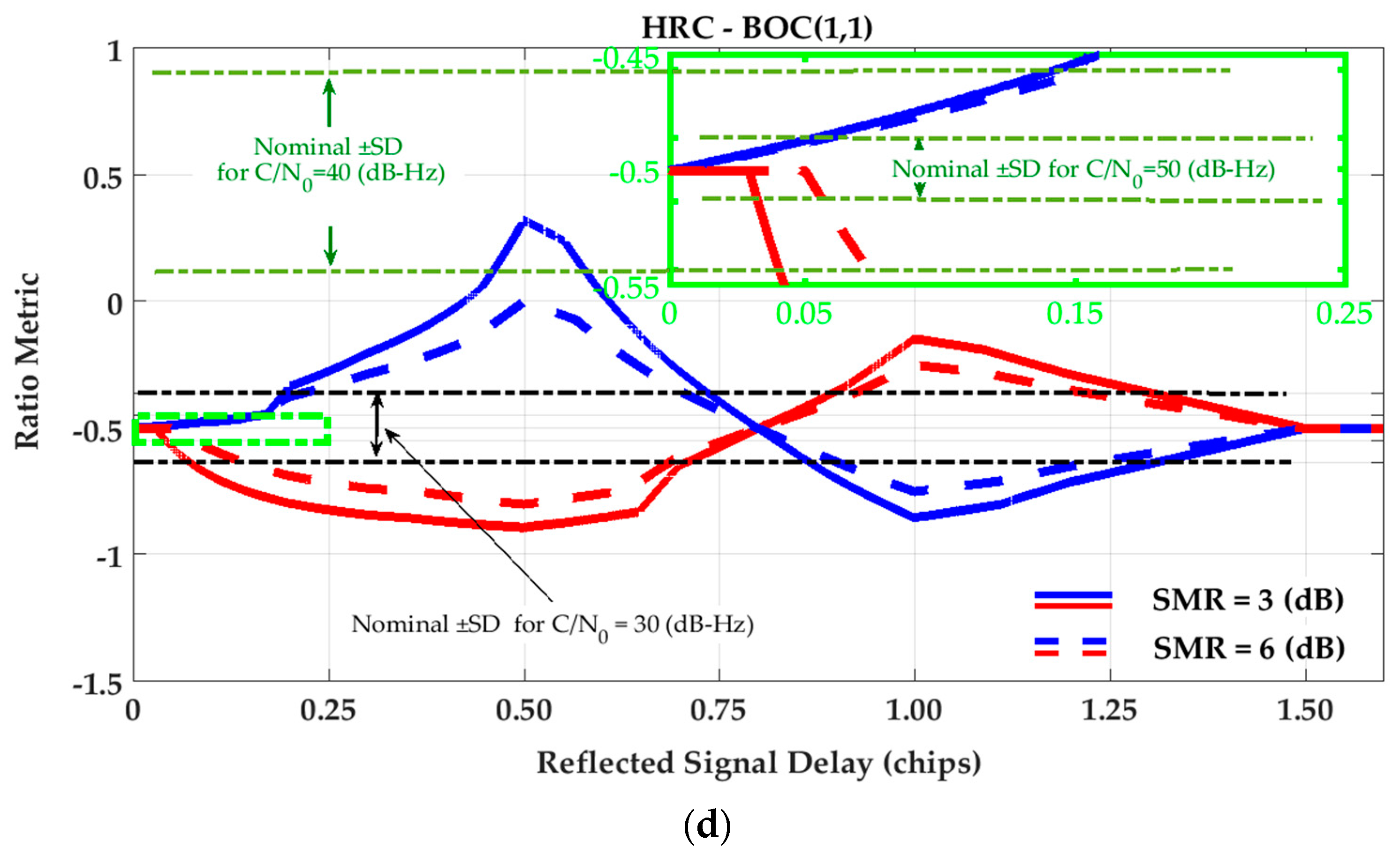
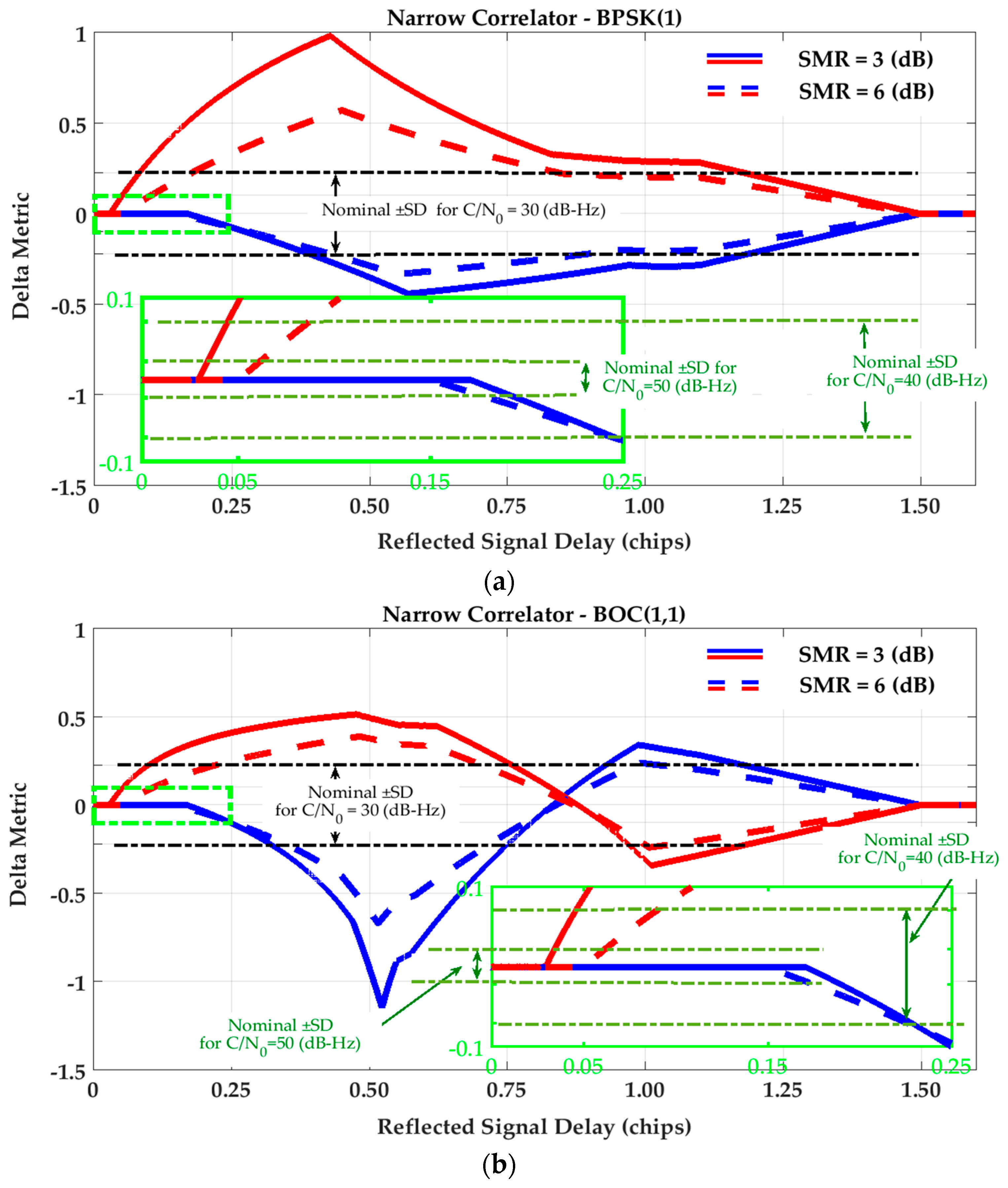
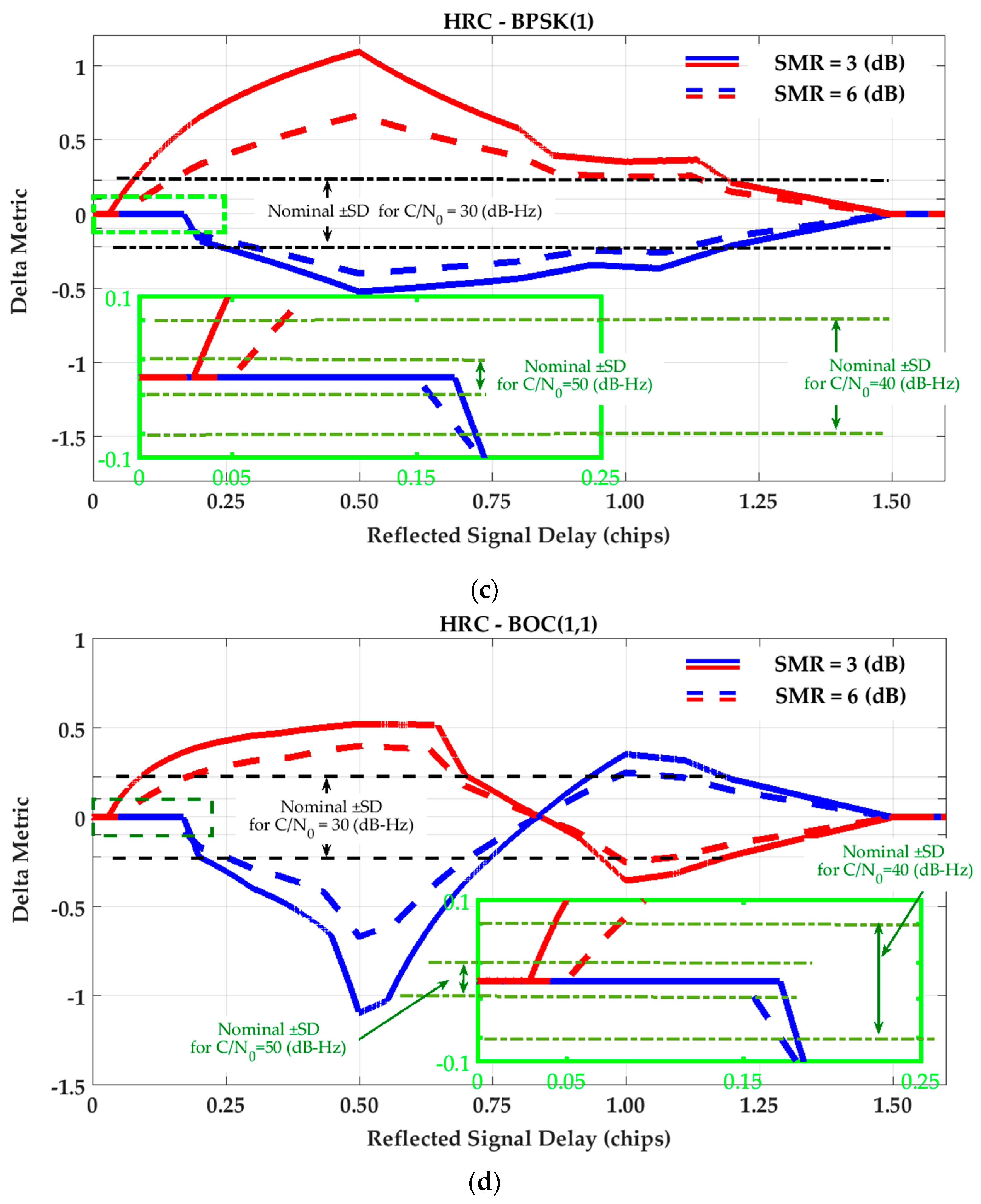
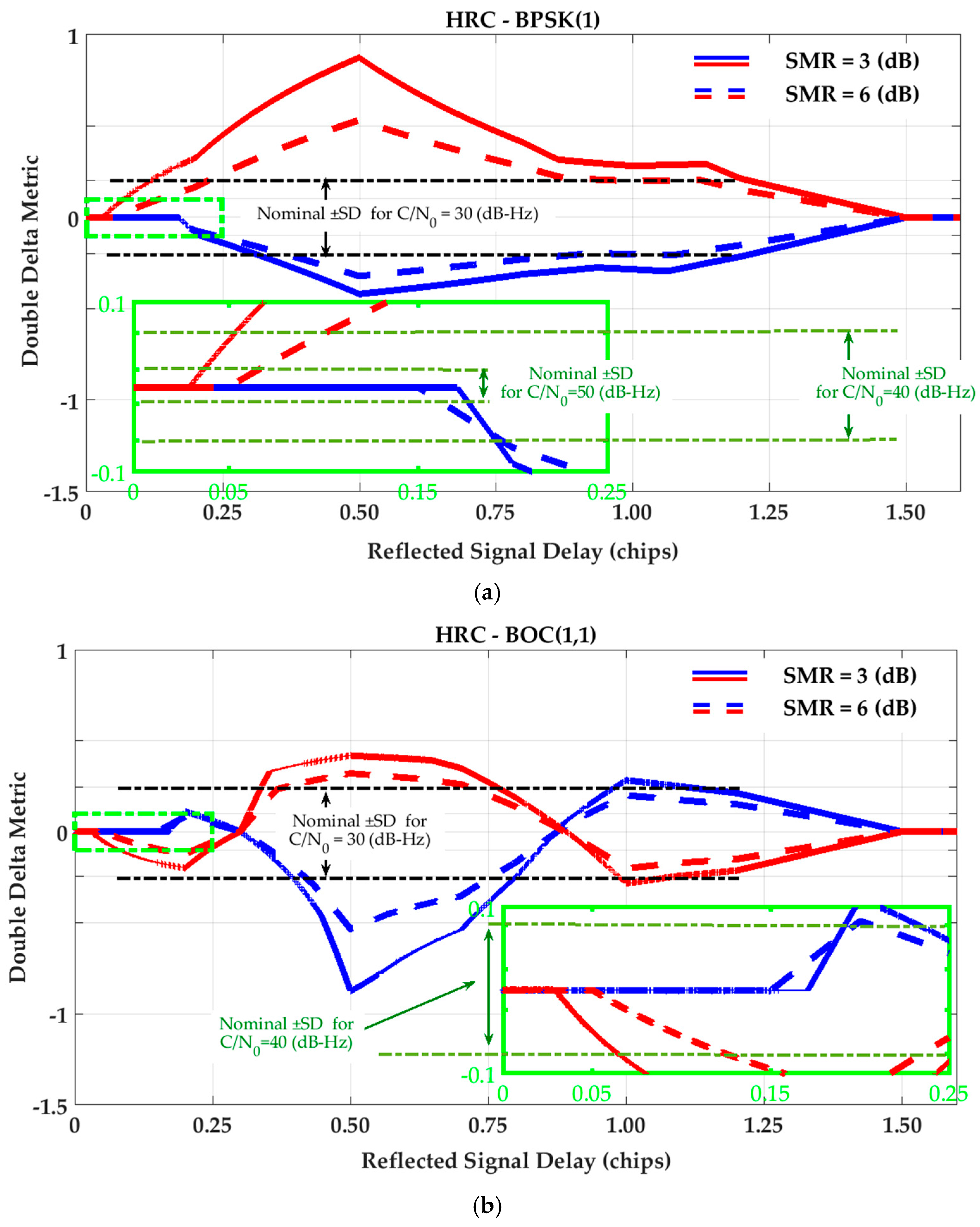
4.2. SQM Variation Profiles
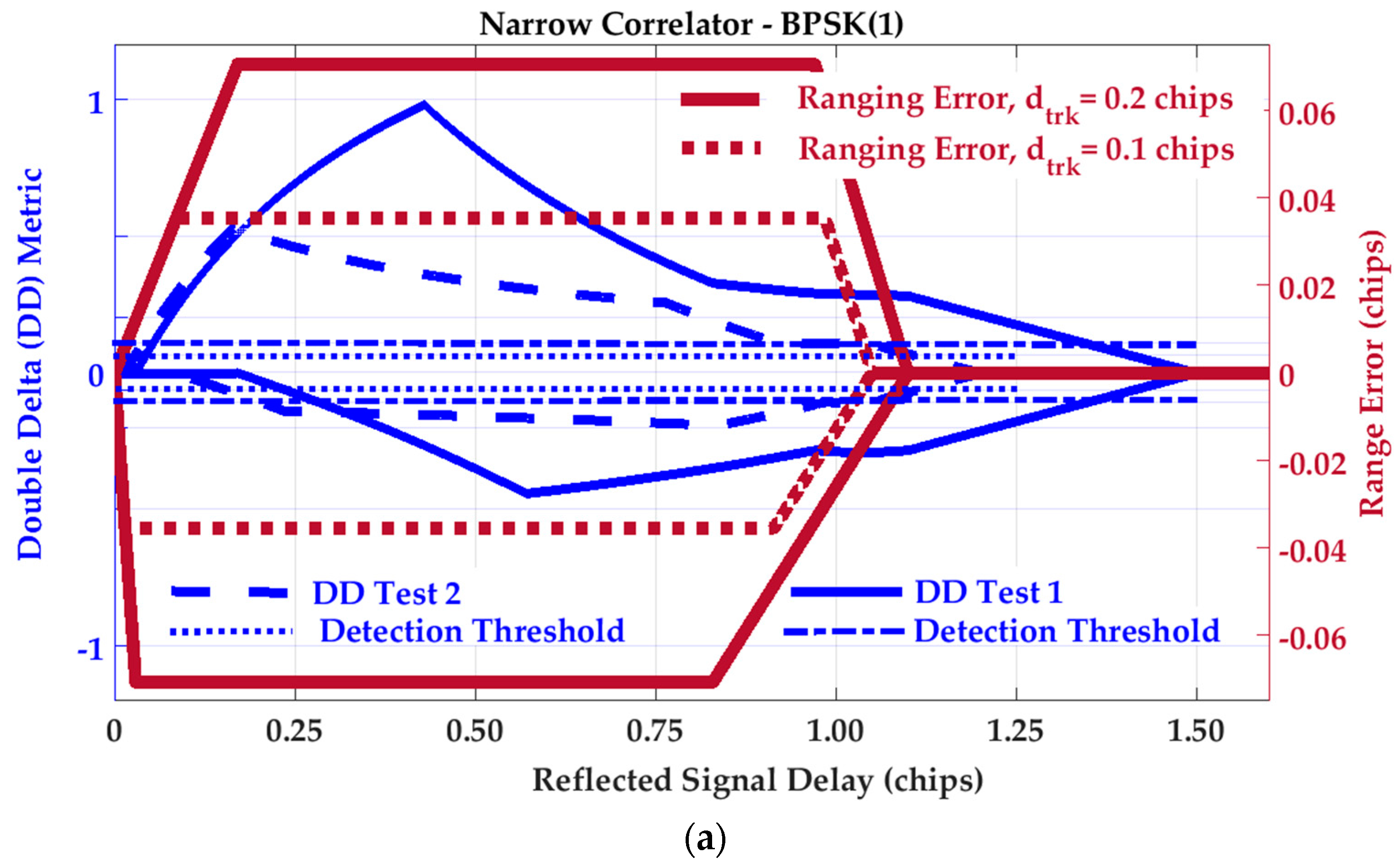
4.3. SQM Sensitivity and Effectiveness in Multipath Detection
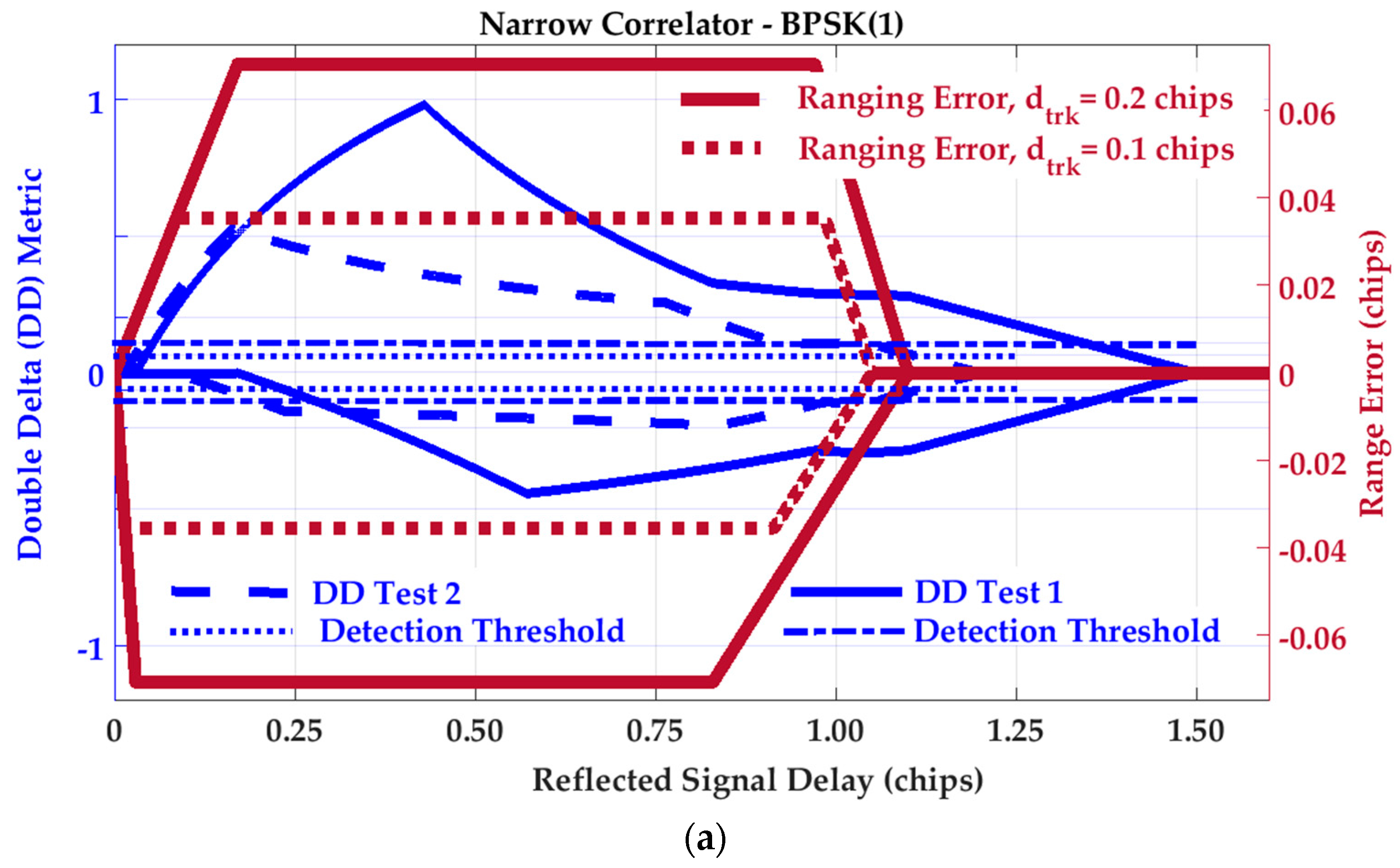
- Under NC discriminator and BPSK(1) signaling, the deviations of the SQM metrics from nominal values (SQM sensitivity) coincide with the non-zero tracking range error envelopes. This means that the SQM detection output can be exploited effectively for multipath mitigation by de-weighting (or excluding) distorted measurements (SQM effectiveness). This is true for all SQM metrics analyzed here.
- The effectiveness of the SQM metric for a NC discriminator with BOC(1,1) modulation is less than that of BPSK(1) (mostly for path delays longer than approximately 0.5 chips) where the corresponding ranging error is about one third of that of the BPSK(1) signal. In this scenario, according to the SQM profiles, the sensitivity of the metrics is also lower, which can be justified based on the different shapes of the correlation curves.
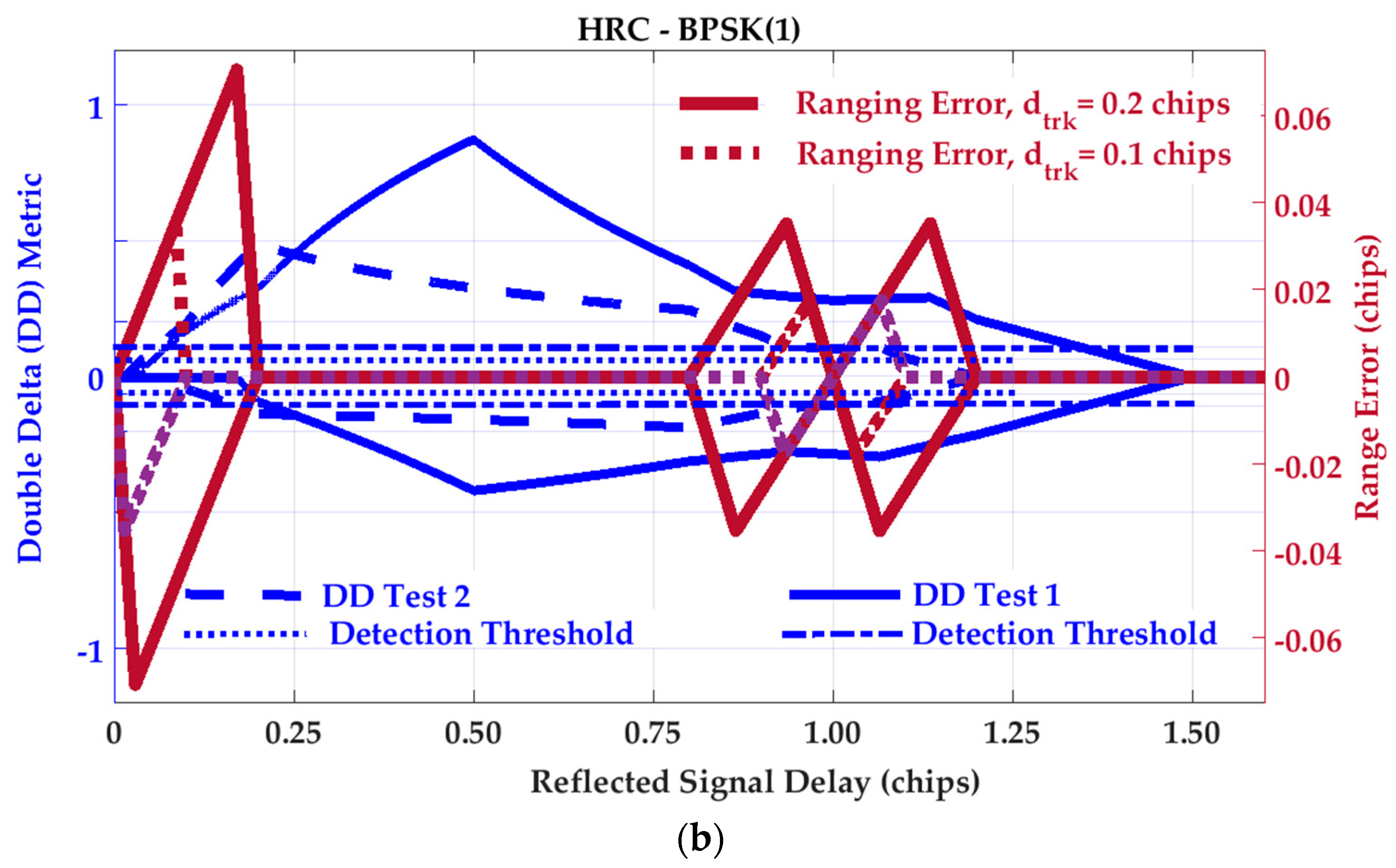
- In the case of the HRC discriminator, for BPSK(1) signaling, the SQM methods are not effective for medium-delay multipath due to negligible ranging errors. In this scenario, relying on SQM detection to de-weight or exclude measurements may even increase position errors due to geometry degradation. For BOC(1,1), the SQM can be effective for some intervals of medium-delay multipath when tracking range error envelopes take non-zero values. For long-delay multipath, comparing BPSK(1) and BOC(1,1) schemes, a lower SQM performance is observed for BOC(1,1) where the sensitivity of the SQM metrics is less and the multipath performance of the BOC(1,1) is significantly better than that of the BPSK(1).
- For a given SMR value, a higher C/N0 value increases SQM sensitivity by reducing the nominal variance of SQM metrics and lowering the detection threshold. In all cases, lower signal to multipath ratios (SMR) result in higher SQM sensitivity as expected.
4.4. Other Practical Issues
- The SQM variation envelopes show the maximum level of SQM sensitivity under specific multipath delay and power. However, in practice due to satellite motion and other effects, there are ever-present phase variations between LOS and multipath signals which cause SQM outputs to fluctuate between in-phase and out-of-phase envelopes. This will reduce the practical sensitivity of SQM metrics during multipath detection. The same argument applies to multipath range error envelopes and SQM effectiveness.
- In the extracted SQM profiles and multipath error envelopes, the power of reflected signals is assumed to be constant for different multipath delays. In practice, the reflected power should preferably be defined as a function of the multipath relative delay and a model of practical observations.
- In the signal monitoring approach, the practical statistics of SQM metrics may deviate from the nominal values based on the actual shape of the correlation function which depends on receiver parameters such as pre-correlation bandwidth and filter characteristics. In addition, the nominal statistics provided in Table 1 are calculated based on theoretical analysis with simplified approximations and assumptions. Therefore, for a reliable detection, the metric statistics and consequently detection thresholds should be calibrated based on practical observations.
- The SQM metrics variations are affected either by C/N0 value fluctuations or correlation peak distortions. Although the C/N0 can be also considered a monitoring metric itself, its effect on SQM-based detection performance is filtered through the tuning detection threshold based on the effective C/N0 at each epoch. If the effective C/N0 is smoothed, the effect of instant changes in C/N0 values will be projected on the SQM metric.
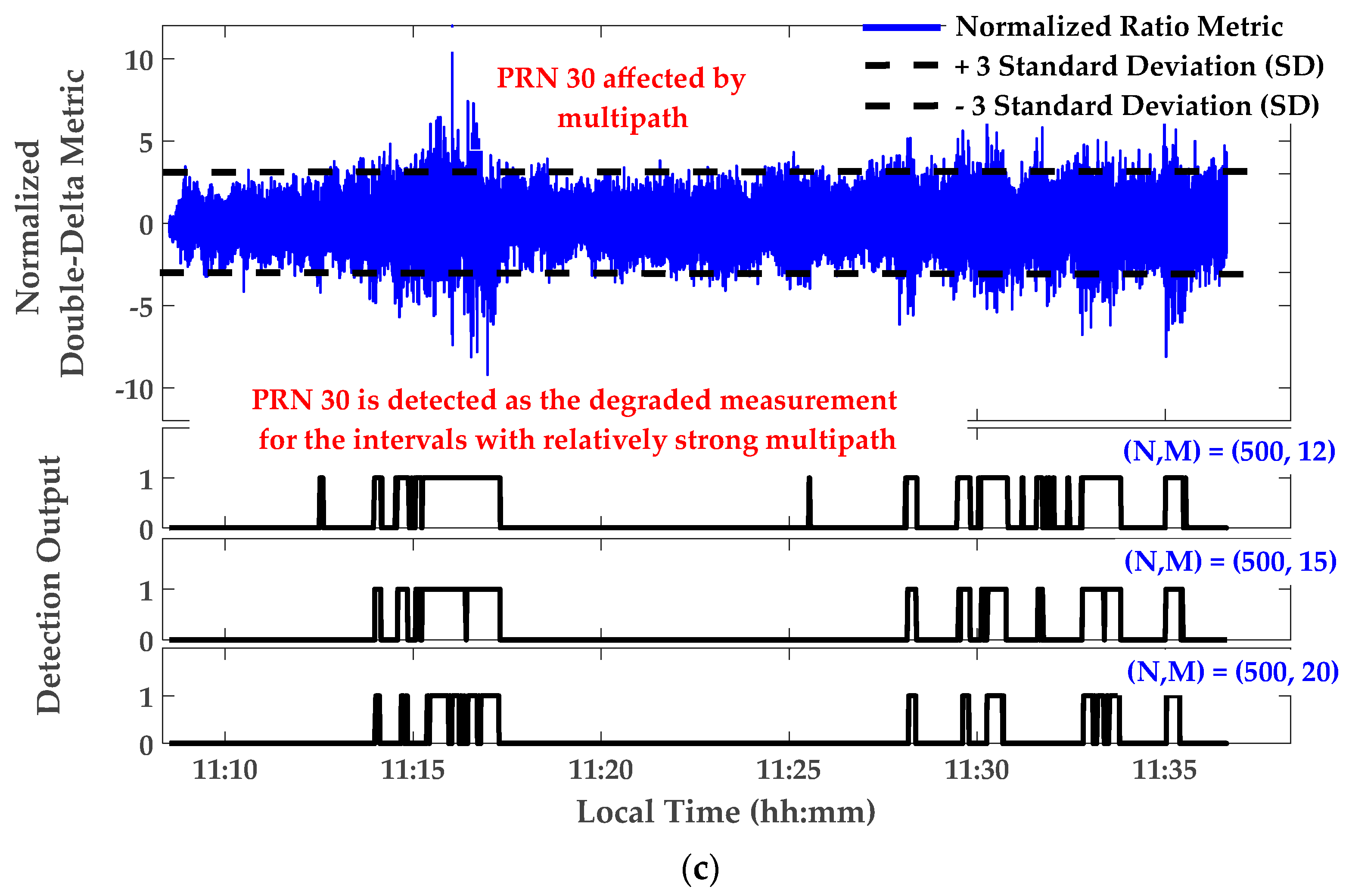
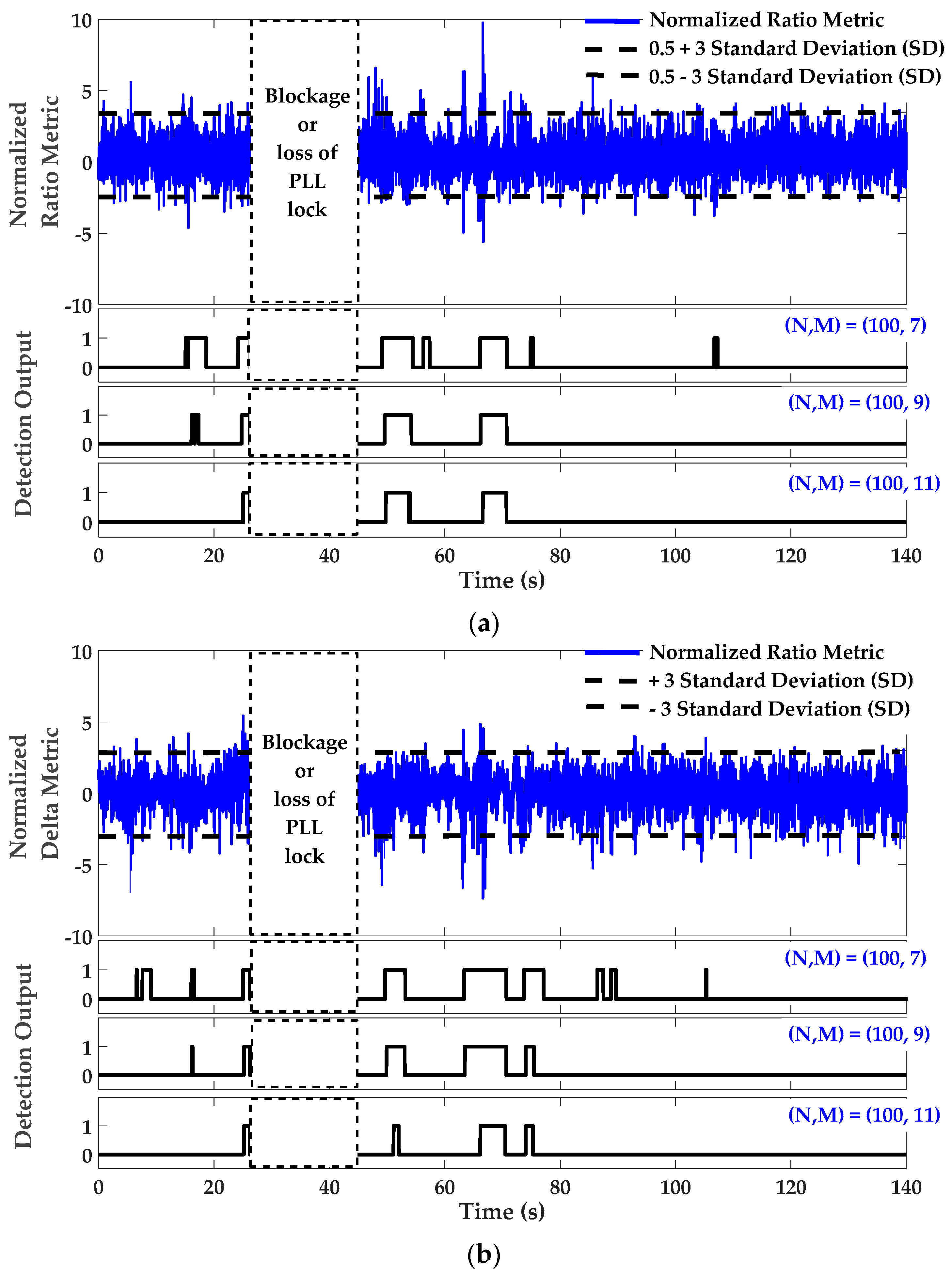
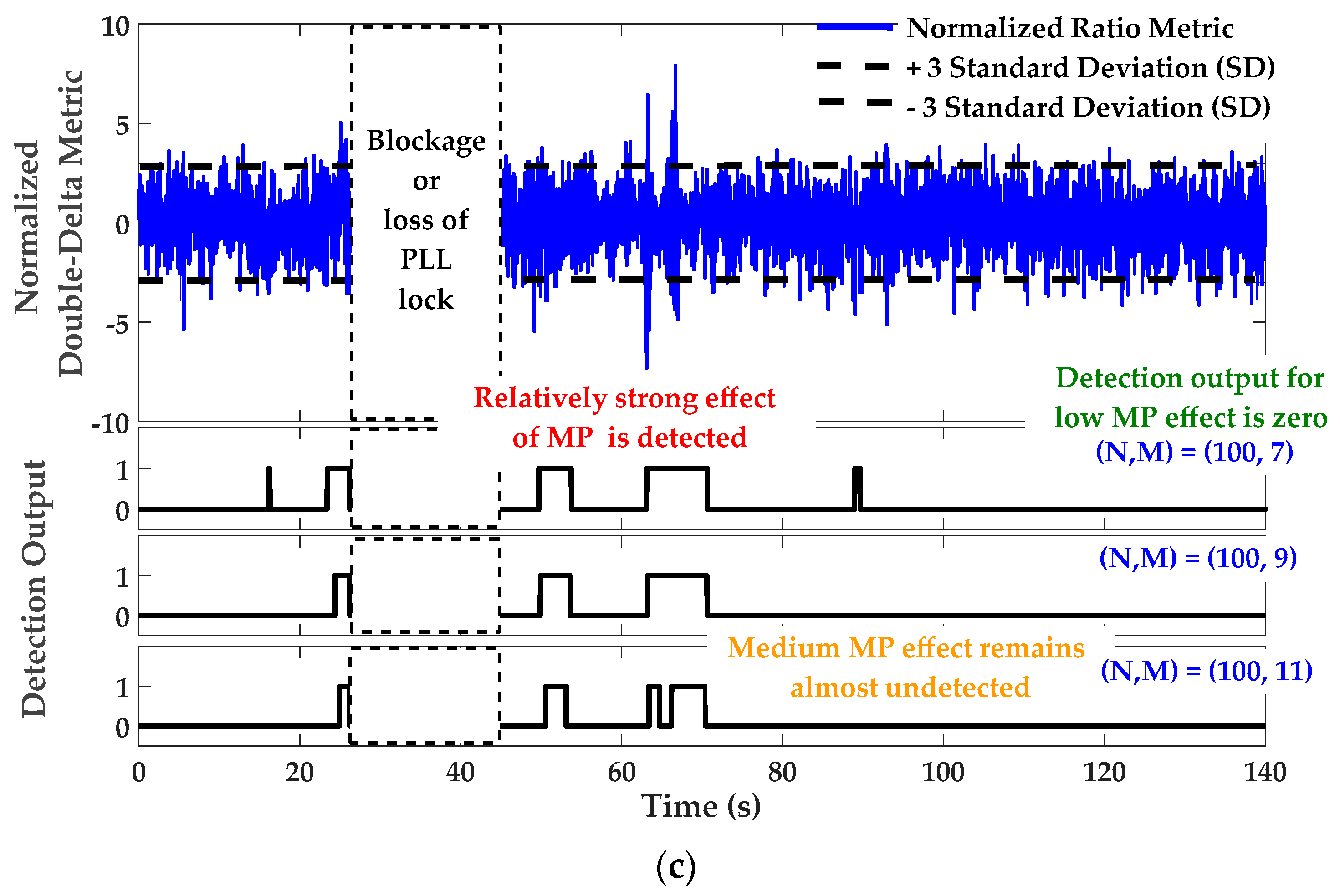
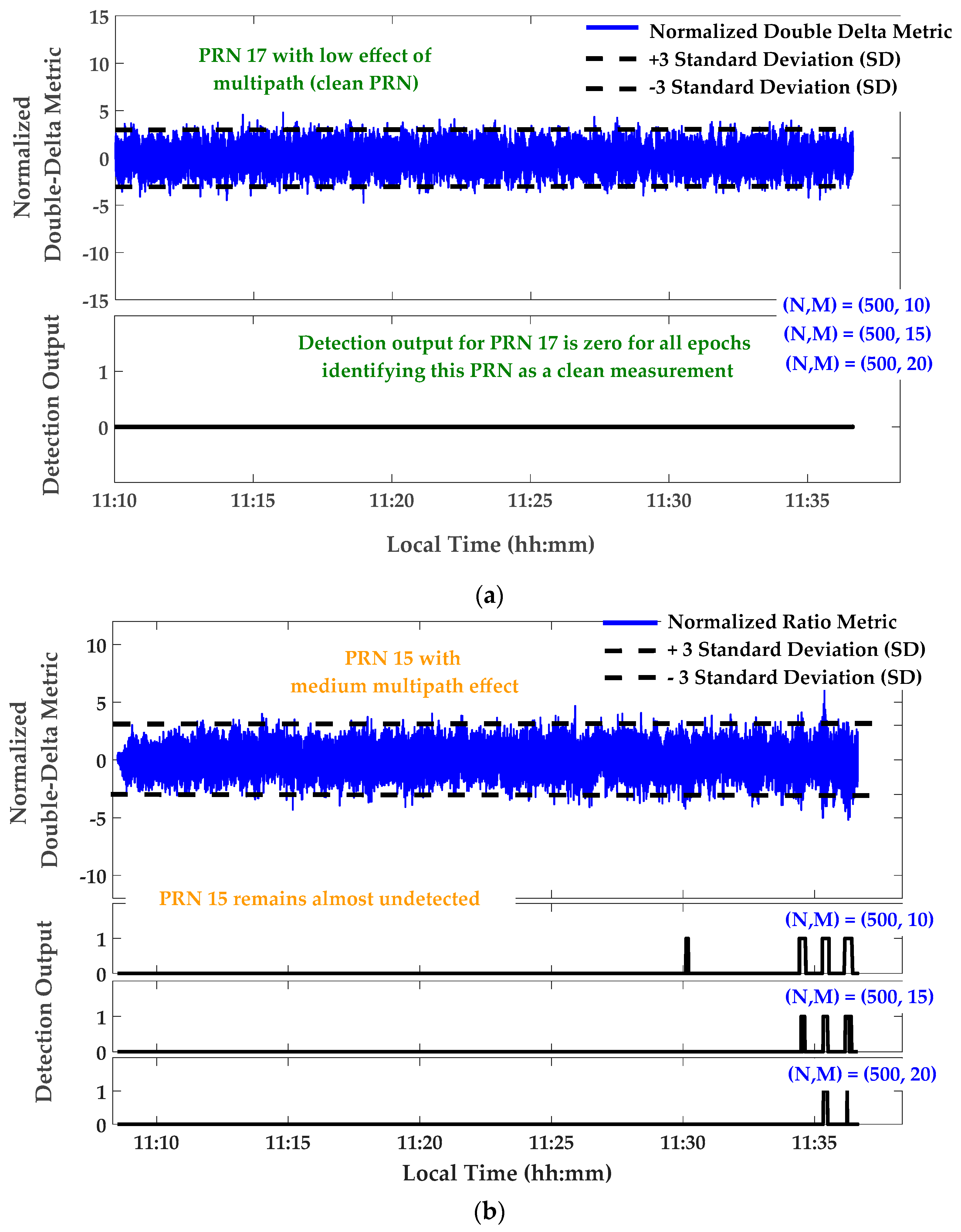
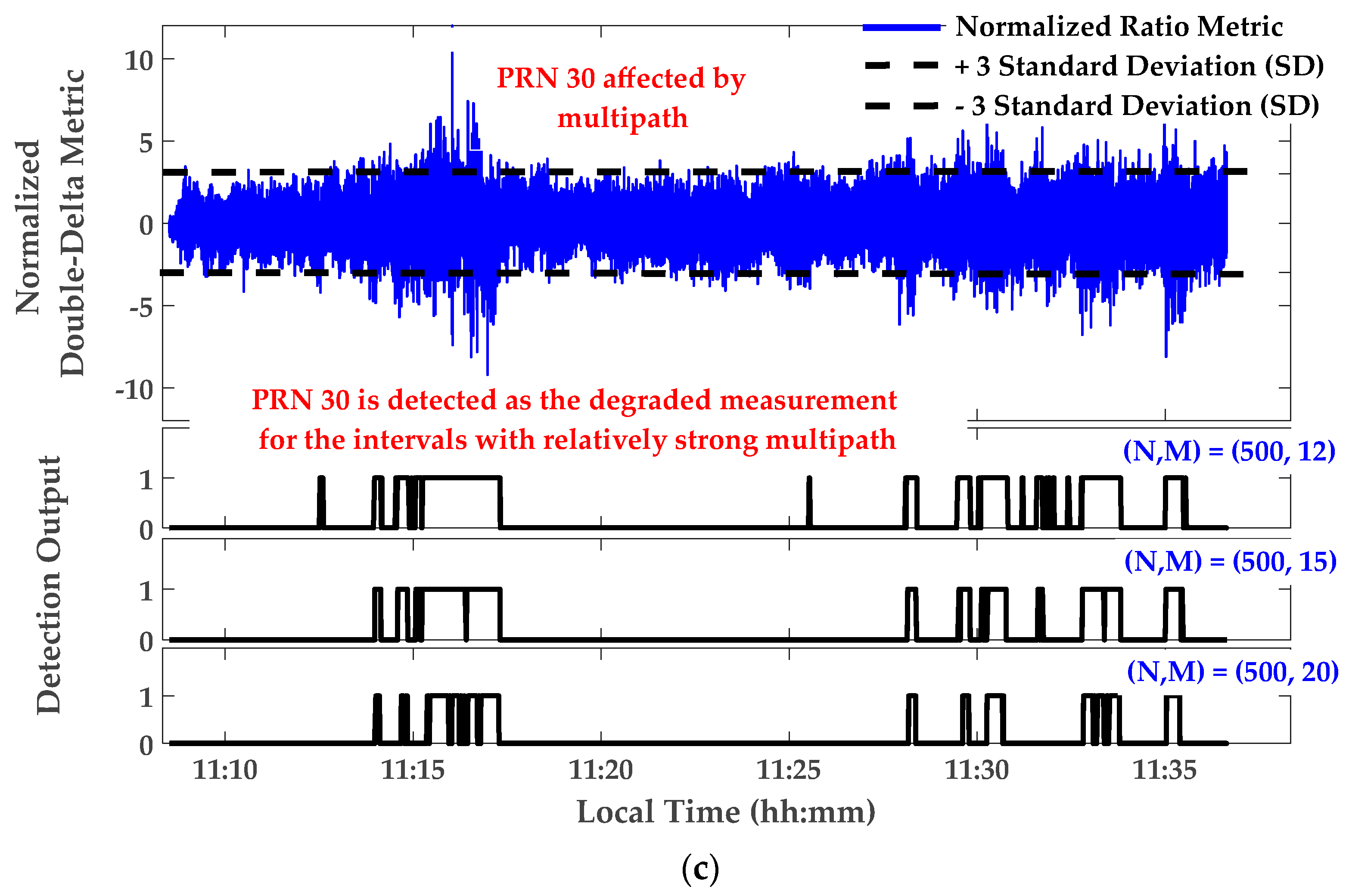
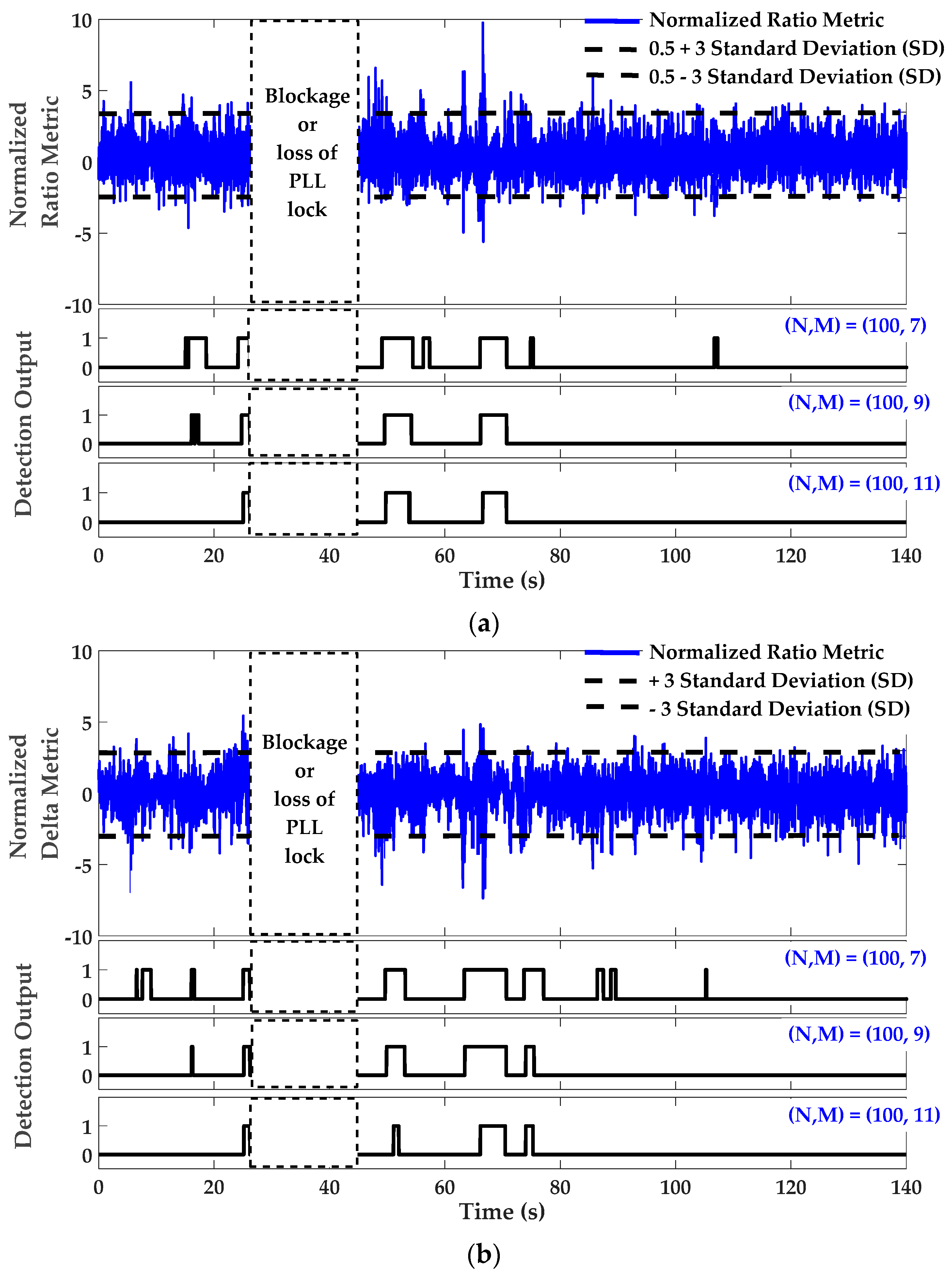
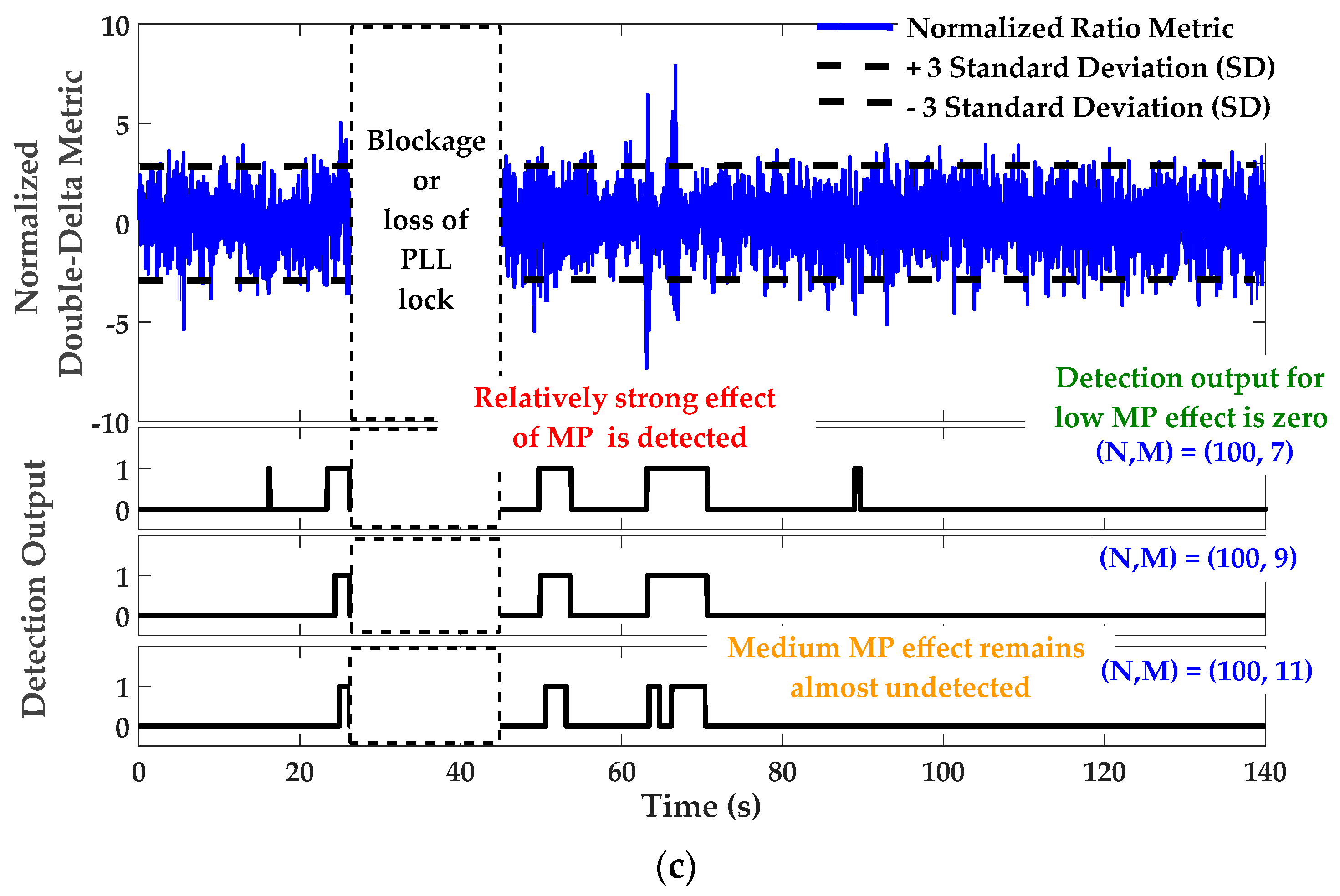
- The multipath detection process can be considered as a general maximizing procedure of the likelihood ratio by setting an appropriate detection threshold for each PRN. By setting this threshold, the SQM threshold excess can be monitored as a primary real-time indication of anomaly detection. However, to optimize detection performance and have more reliable detection (in terms of false alarm and detection probability), a filtering process should be applied at the expense of delayed decision-making. Herein, the detection procedure is defined based on a fixed interval detector called the M of N detection strategy usually used in GNSS acquisition procedures [32]. The M of N search detector takes a window of N samples and compares them to a predefined threshold. If M or more samples exceed the threshold, then the detection output will be 1 and otherwise 0. This procedure is repeated for the next window in the search pattern. With this detection strategy, the overall probability of false alarm in N trials is [32]:where is the binomial coefficient of n and N integers referring to the number of combinations of N items taken n at a time. is the false alarm probability in each trial equals to 0.27% under a normal distribution assumption for the SQM metric and 3 times the standard deviation () as the detection threshold.
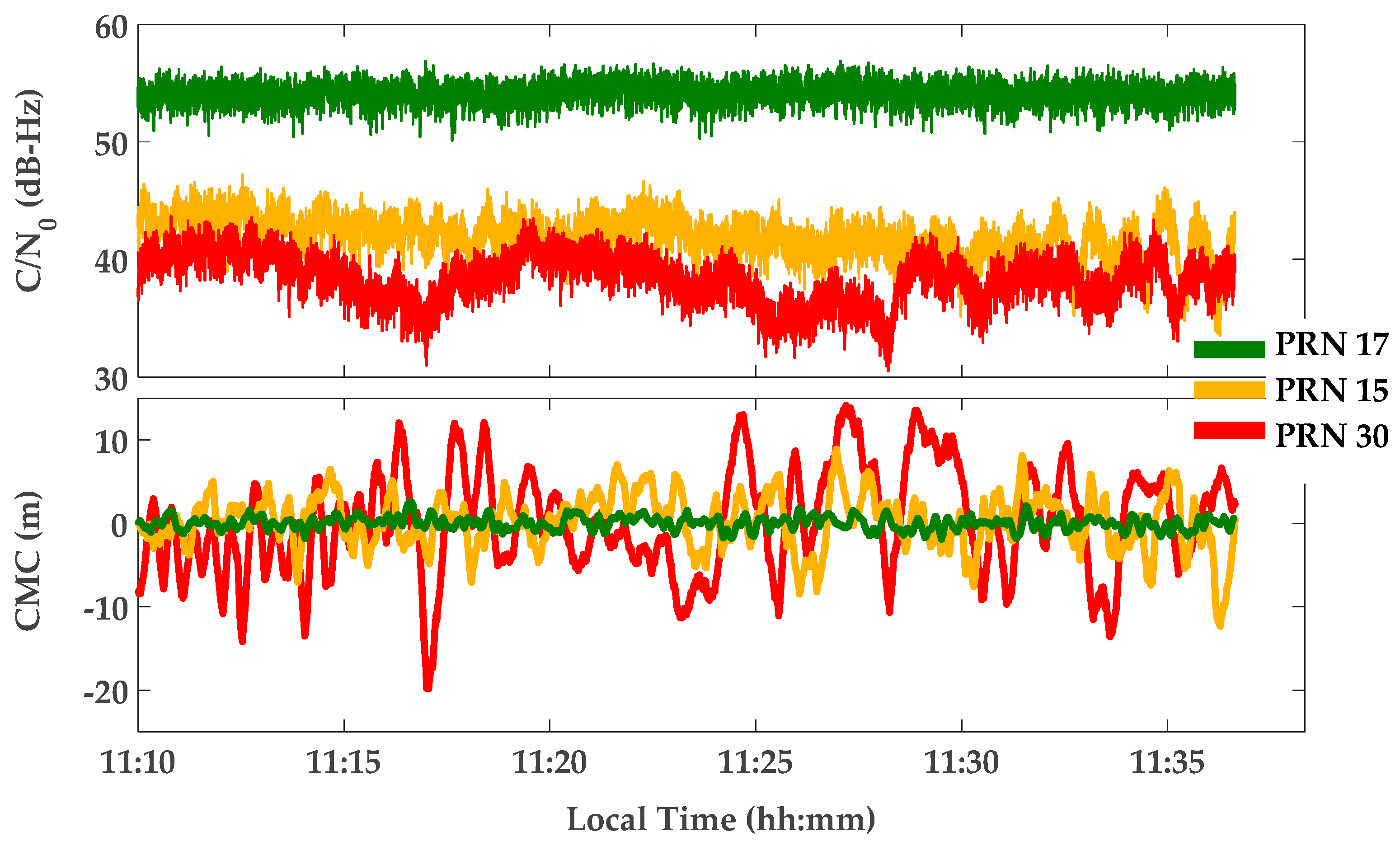
5. Field Data Analysis
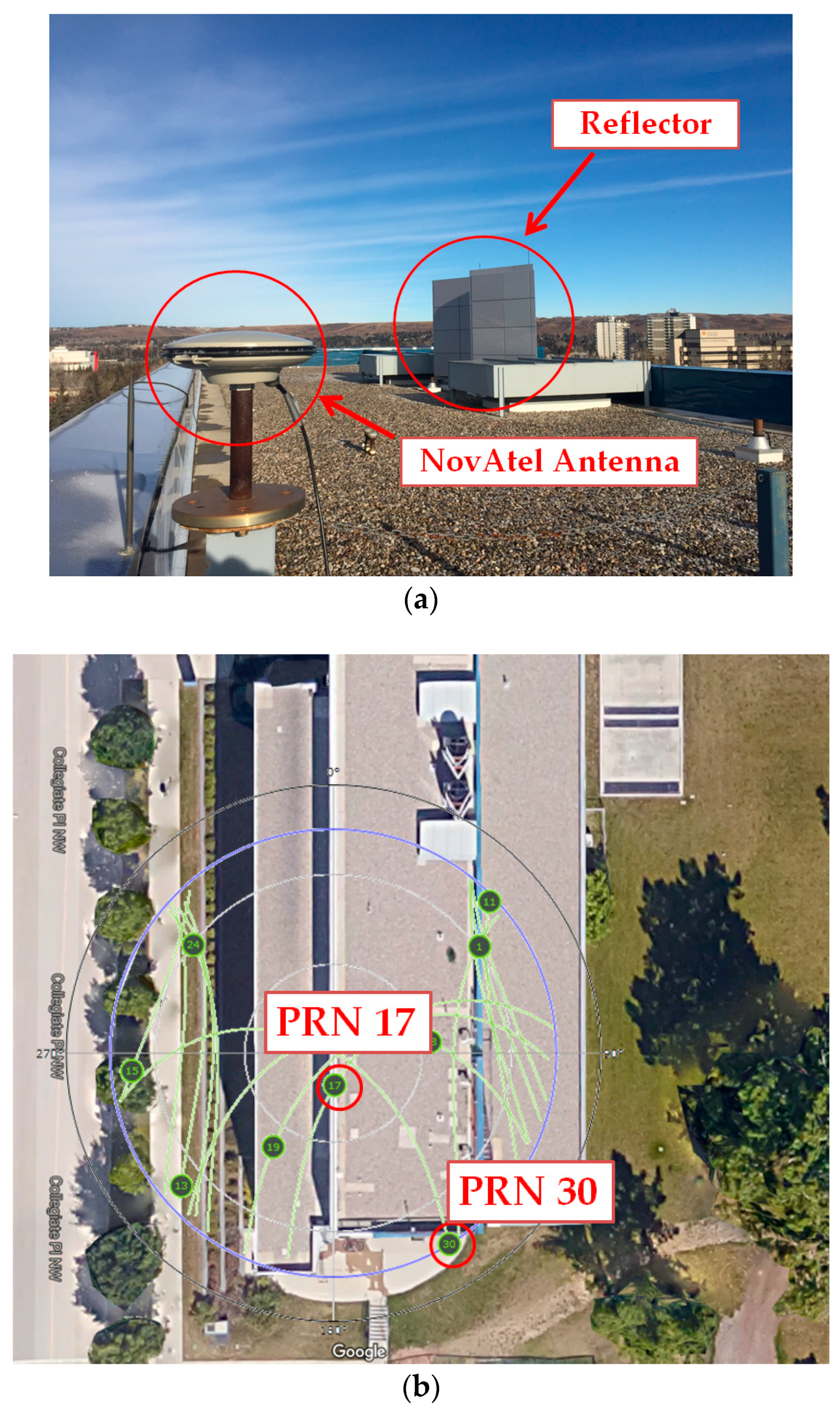
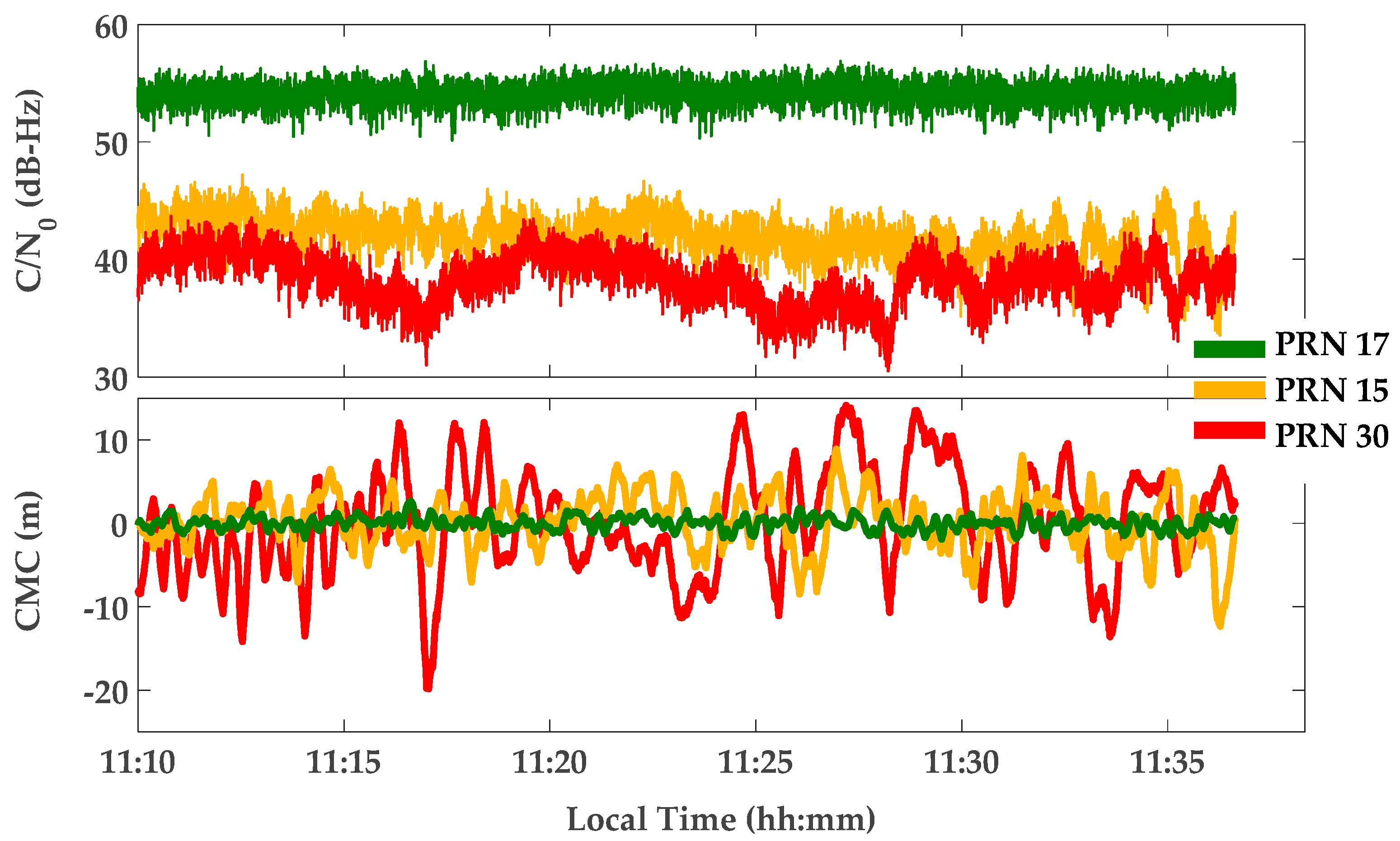
5.1. Static Test Scenario
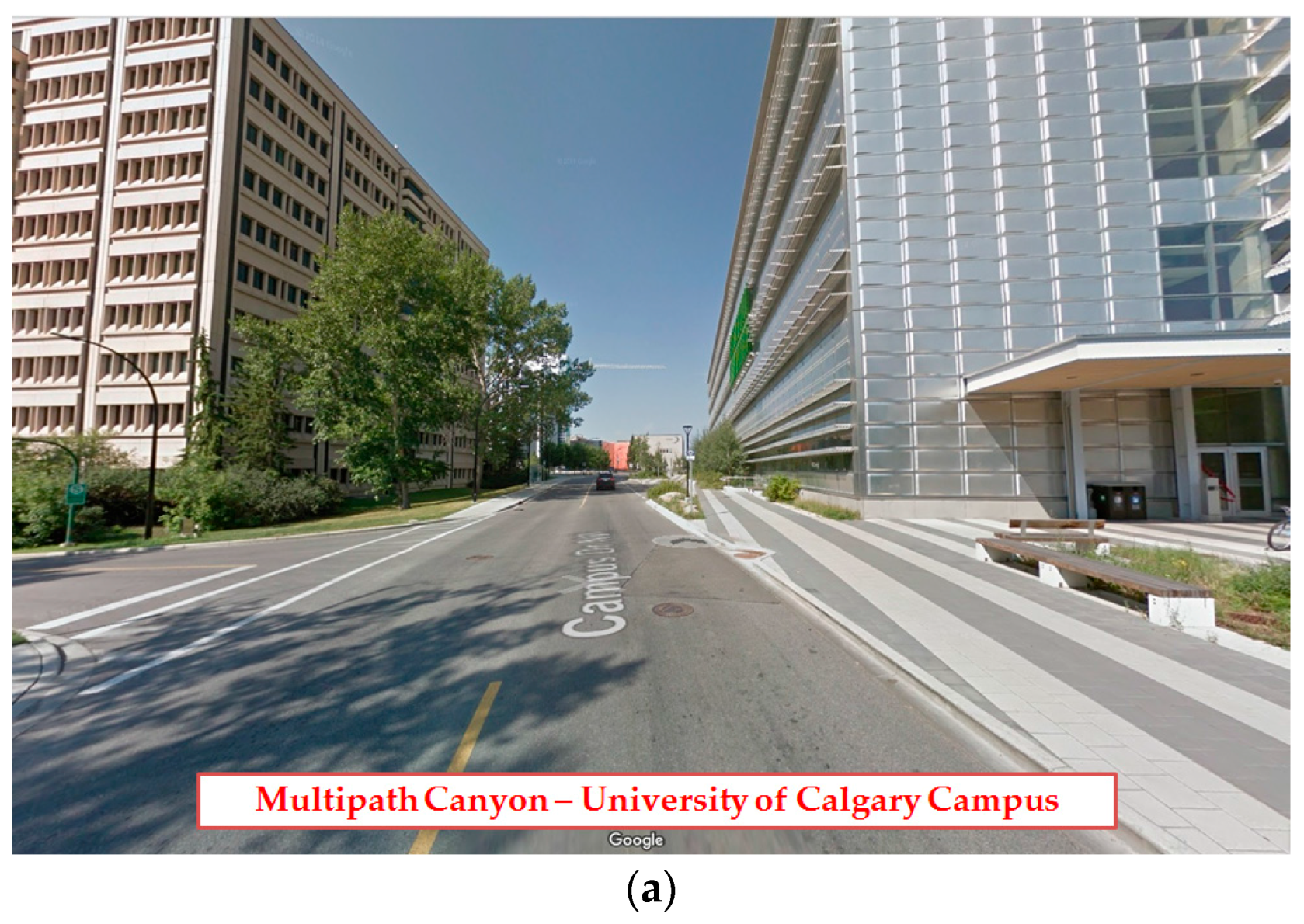
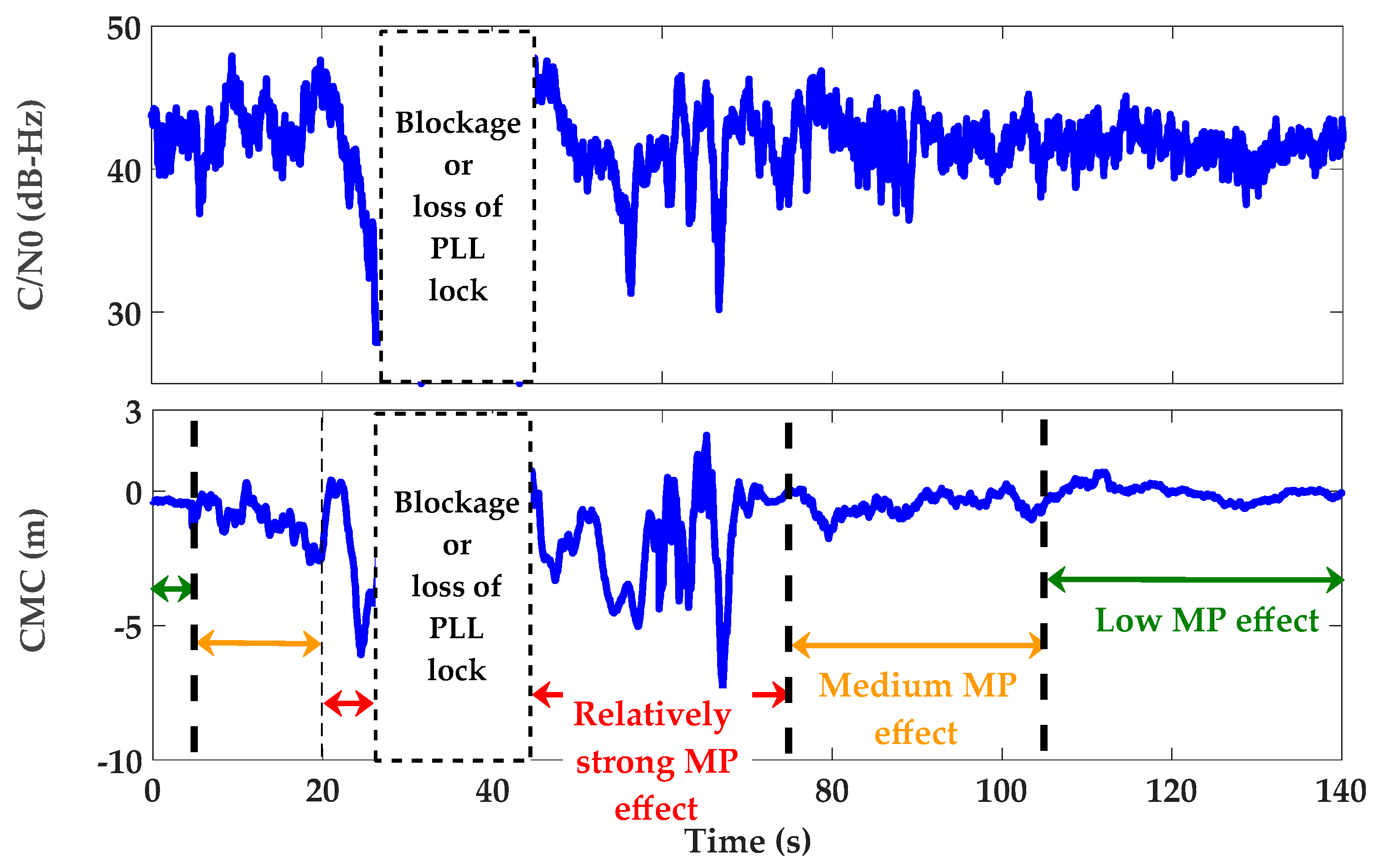
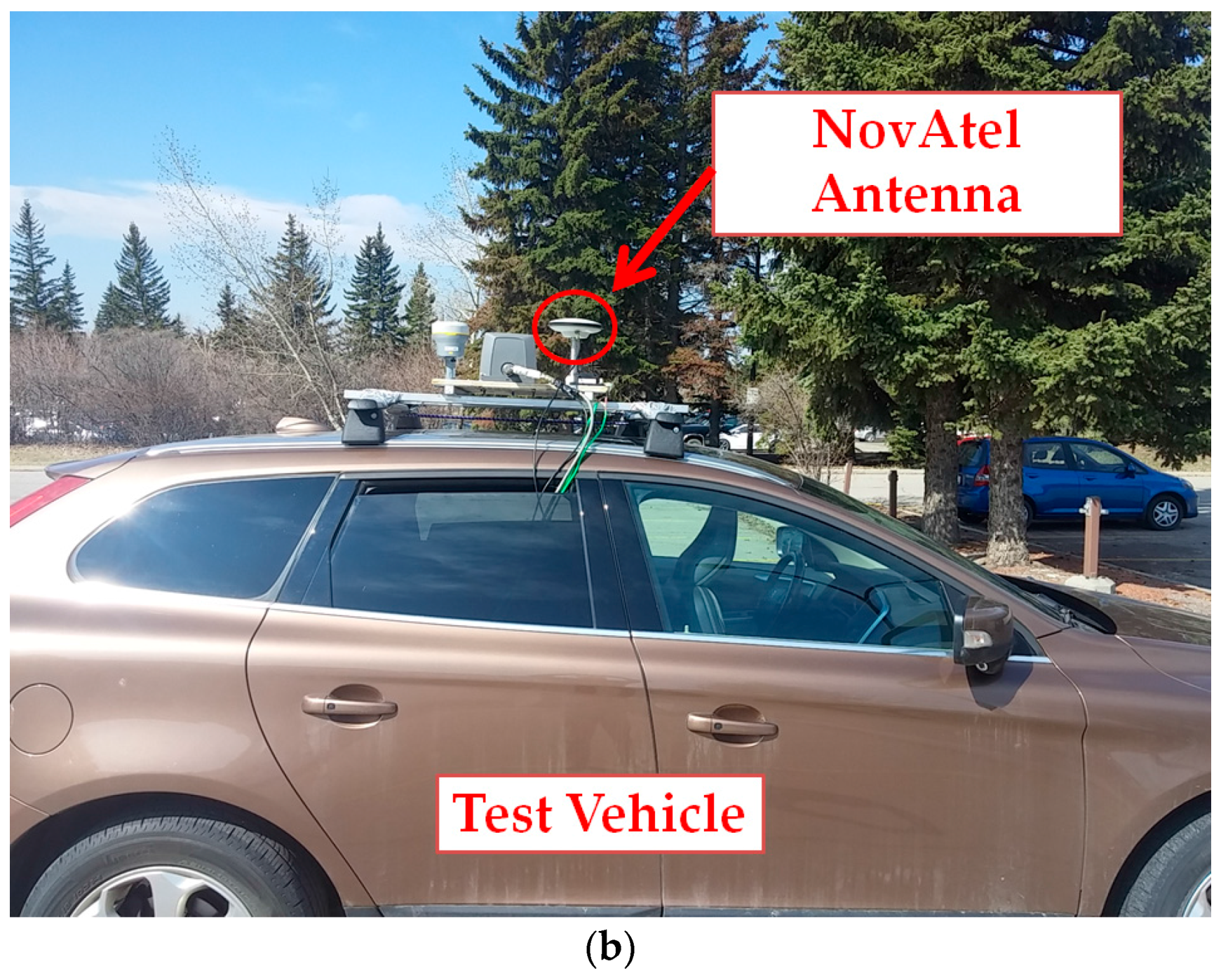
5.2. Kinematic Scenario
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
References
- Kuusniemi, H. User-Level Reliability and Quality Monitoring in Satellite-Based Personal Navigation. Ph.D. Thesis, Publication 544. Tampere University of Technology, Tampere, Finland, 2005. [Google Scholar]
- Irsigler, M.; Hein, G.W.; Eissfeller, B. Multipath Performance Analysis for Future GNSS Signals. In Proceedings of the 2004 National Technical Meeting of the Institute of Navigation (ION NTM 2004), San Diego, CA, USA, 26–28 January 2004. [Google Scholar]
- Bhuiyan, M.Z.H.; Lohan, E.S. Multipath Mitigation Techniques for Satellite-Based Positioning Applications. In Global Navigation Satellite Systems: Signal, Theory and Applications; Jin, S., Ed.; InTech: Rijeka, Croatia, 2012; pp. 405–426. [Google Scholar]
- Jiang, Z.; Groves, P.D. NLOS GPS Signal Detection Using a Dual-polarisation Antenna. GPS Solut. 2014, 18, 15–26. [Google Scholar] [CrossRef]
- Zaheri, M. Enhanced GNSS Signal Detection Performance Utilizing Polarization Diversity. Master’s Thesis, Report No. 20322. Department of Geomatics Engineering, The University of Calgary, Calgary, AB, Canada, 2011. Available online: http://plan.geomatics.ucalgary.ca (accessed on 5 July 2017).
- Kumar, R.; Petovello, M.G. Sensitivity Analysis of 3D Building Model-assisted Snapshot Positioning. In Proceedings of the 29th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2016), Portland, OR, USA, 12–16 September 2016; pp. 1285–1295. [Google Scholar]
- Hsu, L.T.; Gu, Y.; Kamijo, S. NLOS Correction/Exclusion for GNSS Measurement Using RAIM and City Building Models. Sensors 2015, 15, 17329–17349. [Google Scholar] [CrossRef] [PubMed]
- Mubarak, O.M.; Dempster, A.G. Exclusion of Multipath-affected Satellites Using Early Late Phase. J. Glob. Position Syst. 2010, 9, 145–155. [Google Scholar]
- Zair, S.; Hegarat-Mascle, S.L.; Seignez, E. Outlier Detection in GNSS Pseudo-Range/Doppler Measurements for Robust Localization. Sensors 2016, 16, 580. [Google Scholar] [CrossRef] [PubMed]
- Irsigler, M. Multipath Propagation, Mitigation and Monitoring in the Light of Galileo and the Modernized GPS. Ph.D. Thesis, Bundeswehr University, Munich, Germany, 2008. [Google Scholar]
- Fantino, M.; Molino, A.; Mulassano, P.; Nicola, M.; Rao, M. Signal Quality Monitoring: Correlation Mask Based on Ratio Test Metrics for Multipath Detection. In Proceedings of the International Global Navigation Satellite Systems Society, IGNSS Symposium, Australia, 1–3 December 2009. [Google Scholar]
- Franco-Patino, D.M.; Seco-Granados, G.; Dovis, F. Signal Quality Checks for Multipath Detection in GNSS. In Proceedings of the IEEE International Conference on Localization and GNSS (ICL-GNSS 2013), Turin, Italy, 25–27 June 2013; pp. 1–6. [Google Scholar]
- Groves, P.D.; Jiang, Z. Height Aiding, C/N0 Weighting and Consistency Checking for GNSS NLOS and Multipath Mitigation in Urban Areas. J. Navig. 2013, 66, 653–669. [Google Scholar] [CrossRef]
- Strode, P.R.; Groves, P.D. GNSS Multipath Detection Using Three-frequency Signal-to-noise Measurements. GPS Solut. 2016, 20, 399–412. [Google Scholar] [CrossRef]
- Egea-Roca, D.; Seco-Granados, G.; López-Salcedo, J.A.; Dovis, F. Signal-level Integrity and Metrics Based on the Application of Quickest Detection Theory to Multipath Detection. In Proceedings of the 28th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2015), Tampa, FL, USA, 14–18 September 2015; pp. 2926–2938. [Google Scholar]
- Egea-Roca, D.; Seco-Granados, G.; López-Salcedo, J.A. Comprehensive Overview of Quickest Detection Theory and Its Application to GNSS Threat Detection. Gyroscopy Navig. 2017, 8, 1–14. [Google Scholar] [CrossRef]
- Berardo, M.; Lo Presti, L. On the Use of a Signal Quality Index Applying at Tracking Stage Level to Assist the RAIM System of a GNSS Receiver. Sensors 2016, 16, 1029. [Google Scholar] [CrossRef] [PubMed]
- Stansell, T.; Fenton, P.; Garin, L.; Hatch, R.; Knight, J.; Rowitch, D.; Sheynblat, L.; Stratton, A.; Studenny, J.; Weill, L. BOC or MBOC? The Common GPS/Galileo Civil Signal Design: A Manufacturers Dialog, Part 1. Inside GNSS, 2006; Volume 1, Number 5. [Google Scholar]
- Van Dierendonck, A.J.; Fenton, P.C.; Ford, T. Theory and Performance of Narrow Correlator Spacing in a GPS Receiver. J. Inst. Navig. 1992, 39, 265–283. [Google Scholar] [CrossRef]
- McGraw, G.A.; Braasch, M.S. GNSS Multipath Mitigation Using Gated and High Resolution Correlator Concepts. In Proceedings of the National Technical Meeting of the Satellite Division of the Institute of Navigation, San Diego, CA, USA, 25–27 January 1999; pp. 333–342. [Google Scholar]
- Jafarnia-Jahromi, A. GNSS Signal Authenticity Verification in the Presence of Structural Interference. Ph.D. Thesis, Report No. 20385. Department of Geomatics Engineering, University of Calgary, Calgary, AB, Canada, 2013. Available online: http://plan.geomatics.ucalgary.ca (accessed on 5 July 2017).
- Misra, P.; Enge, P. Global Positioning System: Signals, Measurements and Performance, 2nd ed.; Ganga-Jamuna Press: Lincoln, MA, USA, 2006. [Google Scholar]
- Pirsiavash, A.; Broumandan, A.; Lachapelle, G. Two Dimensional Signal Quality Monitoring for Spoofing Detection. In Proceedings of the ESA/ESTEC NAVITEC 2016 Conference, Noordwijk, The Netherlands, 14–16 December 2016. [Google Scholar]
- Jafarnia-Jahromi, A.; Broumandan, A.; Daneshmand, S.; Lachapelle, G.; Ioannides, R.T. Galileo Signal Authenticity Verification Using Signal Quality Monitoring Methods. In Proceedings of the IEEE International Conference on Localization and GNSS (ICL-GNSS 2016), Barcelona, Spain, 28–30 June 2016; pp. 1–8. [Google Scholar]
- Fortin, M.A. Robustness Techniques for Global Navigation Satellite Systems (GNSS) Receivers. Ph.D. Thesis, École De Technologie Supérieure, Montreal, QC, Canada, 2015. [Google Scholar]
- Mitelman, A.M.; Phelts, R.E.; Akos, D.; Pullen, S.; Enge, P. A Real-time Signal Quality Monitor for GPS Augmentation Systems. In Proceedings of the 13th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 2000), Salt Lake City, UT, USA, 19–22 September 2000; pp. 19–22. [Google Scholar]
- Phelts, R.E.; Walter, T.; Enge, P. Toward Real-time SQM for WAAS: Improved Detection Techniques. In Proceedings of the 16th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS/GNSS 2003), Portland, OR, USA, 9–12 September 2003; pp. 2739–2749. [Google Scholar]
- Mitelman, A.M. Signal Quality Monitoring for GPS Augmentation Systems. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 2004. [Google Scholar]
- Akos, D.M.; Phelts, R.E.; Pullen, S.; Enge, P. Signal Quality Monitoring- Test Results. In Proceedings of the 2000 National Technical Meeting, Institute of Navigation, San Diego, CA, USA, 26–28 January 2000; pp. 536–541. [Google Scholar]
- Irsigler, M.; Eissfeller, B. Comparison of Multipath Mitigation Techniques with Consideration of Future Signal Structures. In Proceedings of the 16th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS/GNSS 2003), Portland, OR, USA, 9–12 September 2003; pp. 2584–2592. [Google Scholar]
- Ray, J.K. Mitigation of GPS Code and Carrier Phase Multipath Effects Using a Multi-Antenna System. Ph.D. Thesis, University of Calgary, Calgary, AB, Canada, 2000. Available online: http://plan.geomatics.ucalgary.ca (accessed on 4 July 2017).
- Kaplan, E.D.; Hegarty, C.J. Understanding GPS Principles and Applications, 2nd ed.; Artch House: Norwood, MA, USA, 2006; ISBN 158-053-894-0. [Google Scholar]
- Borre, K.; Akos, D.M.; Bertelsen, N.; Rinder, P.; Jensen, S.H. A Software-Defined GPS and Galileo Receiver: A Single-Frequency Approach; Birkhaüser: Boston, MA, USA, 2007; ISBN 978-081-764-390-4. [Google Scholar]
- Parkingson, B.W.; Spilker, J.J. Global Positioning System: Theory and Applications; American Institute of Aeronautics and Astronautics Inc.: Washington, DC, USA, 1996; Volume 2. [Google Scholar]
- Braasch, M.S. Isolation of GPS Multipath and Receiver Tracking Errors. J. Inst. Navig. 1995, 41, 415–434. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SQM Metric | Definition | BPSK(1) | BOC(1,1) | ||
|---|---|---|---|---|---|
| Nominal Mean | Nominal Variance | Nominal Mean | Nominal Variance | ||
| (Single-sided or asymmetric) Ratio Metric | 0.5 | −0.5 | |||
| Delta Metric | 0 | 0 | |||
| Double Delta Metric | 0 | 0 | |||
| SQM Metric | Metric Definition | Nominal Mean | Nominal SD | Nominal SD for C/N0 = 45 (dB-Hz) |
|---|---|---|---|---|
| Double Delta Test 1 | 0 | 0.0356 | ||
| Double Delta Test 2 | 0 | 0.0218 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pirsiavash, A.; Broumandan, A.; Lachapelle, G. Characterization of Signal Quality Monitoring Techniques for Multipath Detection in GNSS Applications. Sensors 2017, 17, 1579. https://doi.org/10.3390/s17071579
Pirsiavash A, Broumandan A, Lachapelle G. Characterization of Signal Quality Monitoring Techniques for Multipath Detection in GNSS Applications. Sensors. 2017; 17(7):1579. https://doi.org/10.3390/s17071579
Chicago/Turabian StylePirsiavash, Ali, Ali Broumandan, and Gérard Lachapelle. 2017. "Characterization of Signal Quality Monitoring Techniques for Multipath Detection in GNSS Applications" Sensors 17, no. 7: 1579. https://doi.org/10.3390/s17071579
APA StylePirsiavash, A., Broumandan, A., & Lachapelle, G. (2017). Characterization of Signal Quality Monitoring Techniques for Multipath Detection in GNSS Applications. Sensors, 17(7), 1579. https://doi.org/10.3390/s17071579