A Damping Grid Strapdown Inertial Navigation System Based on a Kalman Filter for Ships in Polar Regions

Abstract
:1. Introduction
2. Grid SINS Mechanization
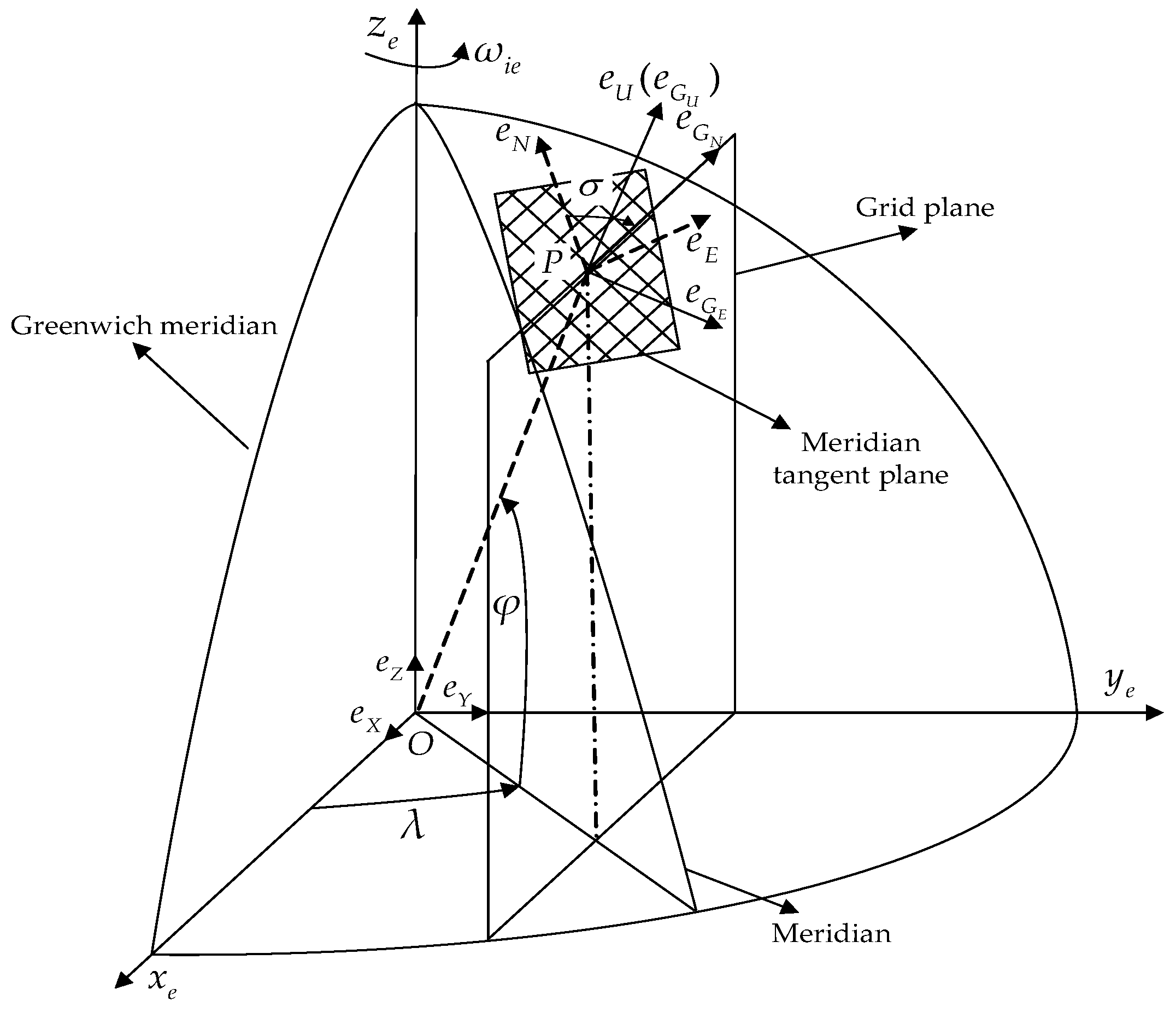
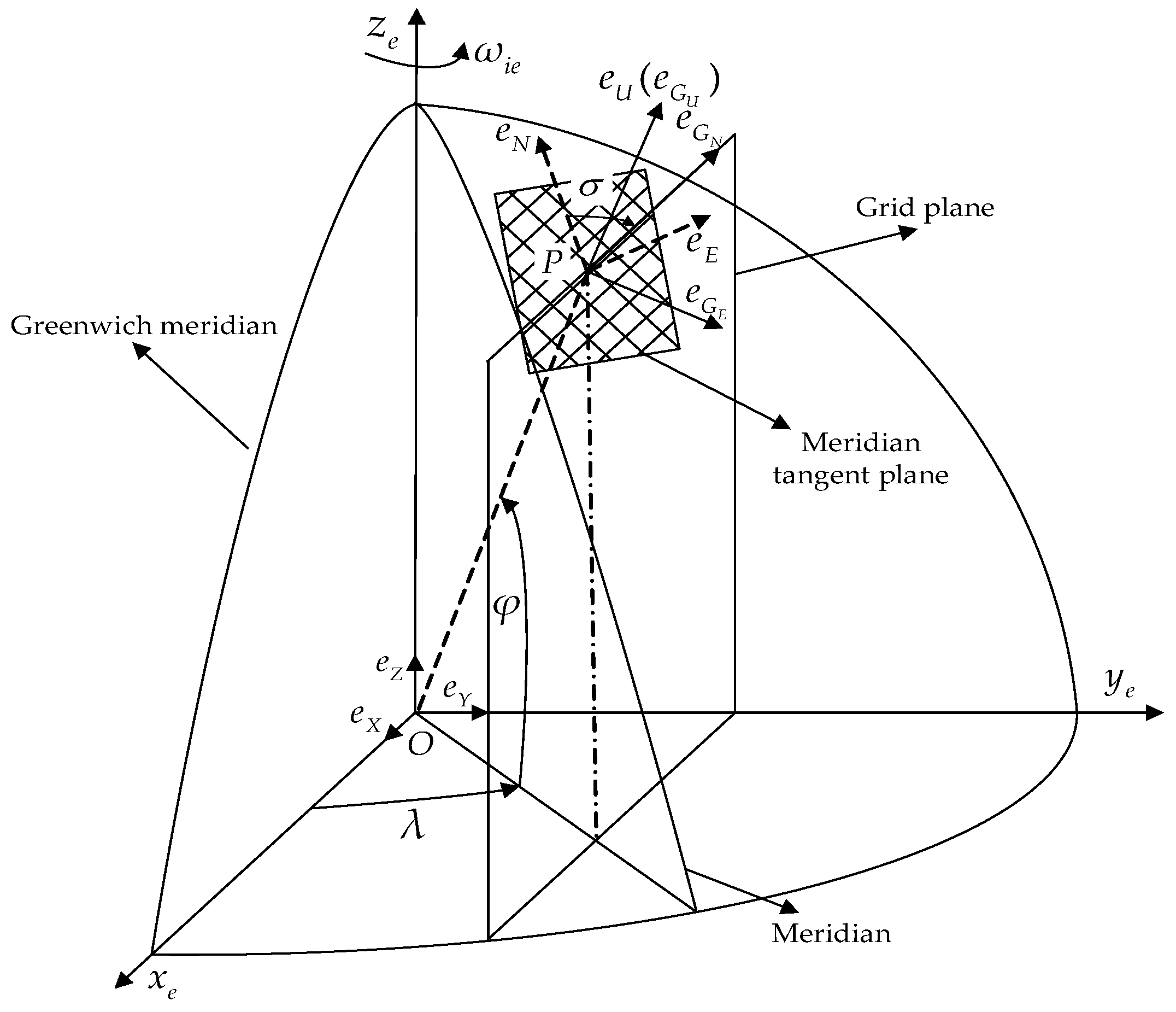
2.1. The Definitions of Common Coordinate Systems
2.2. The Transformation Relationships of Common Coordinate Systems
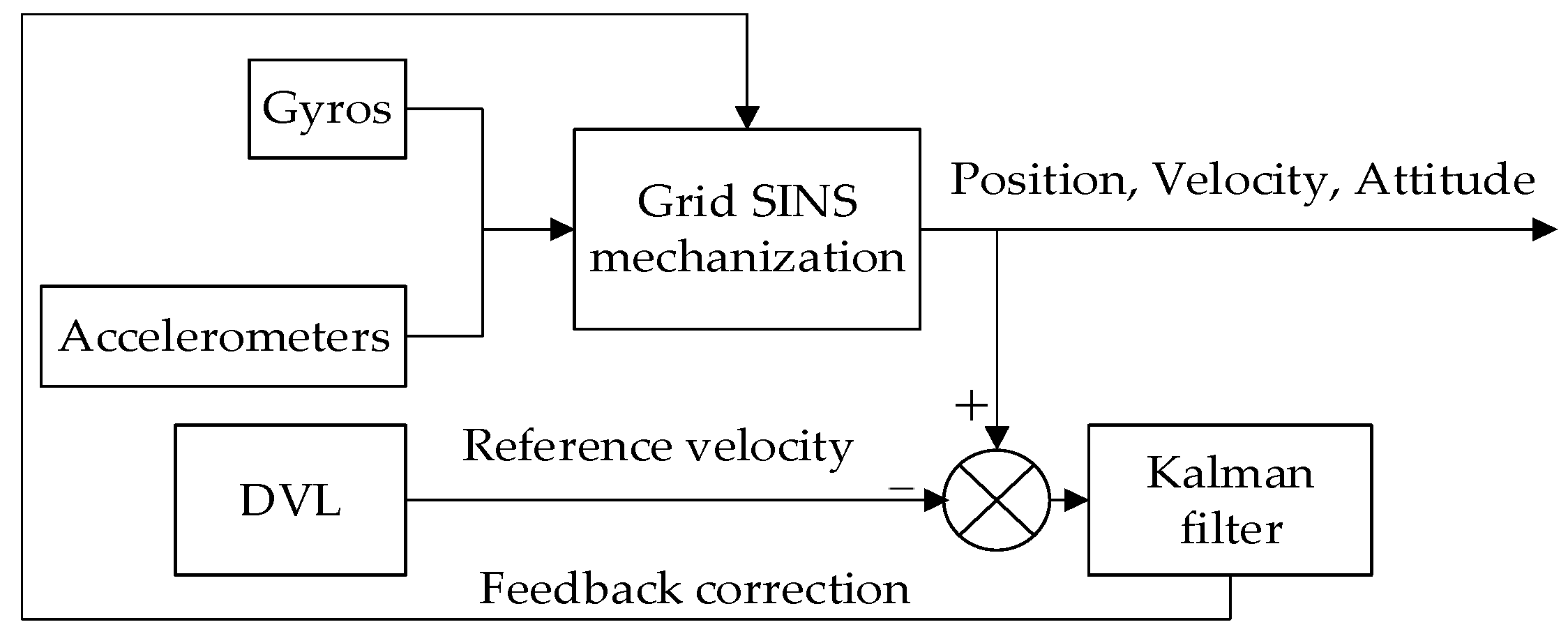
2.3. Grid SINS Mechanization
3. The KF-DGSINS Algorithm
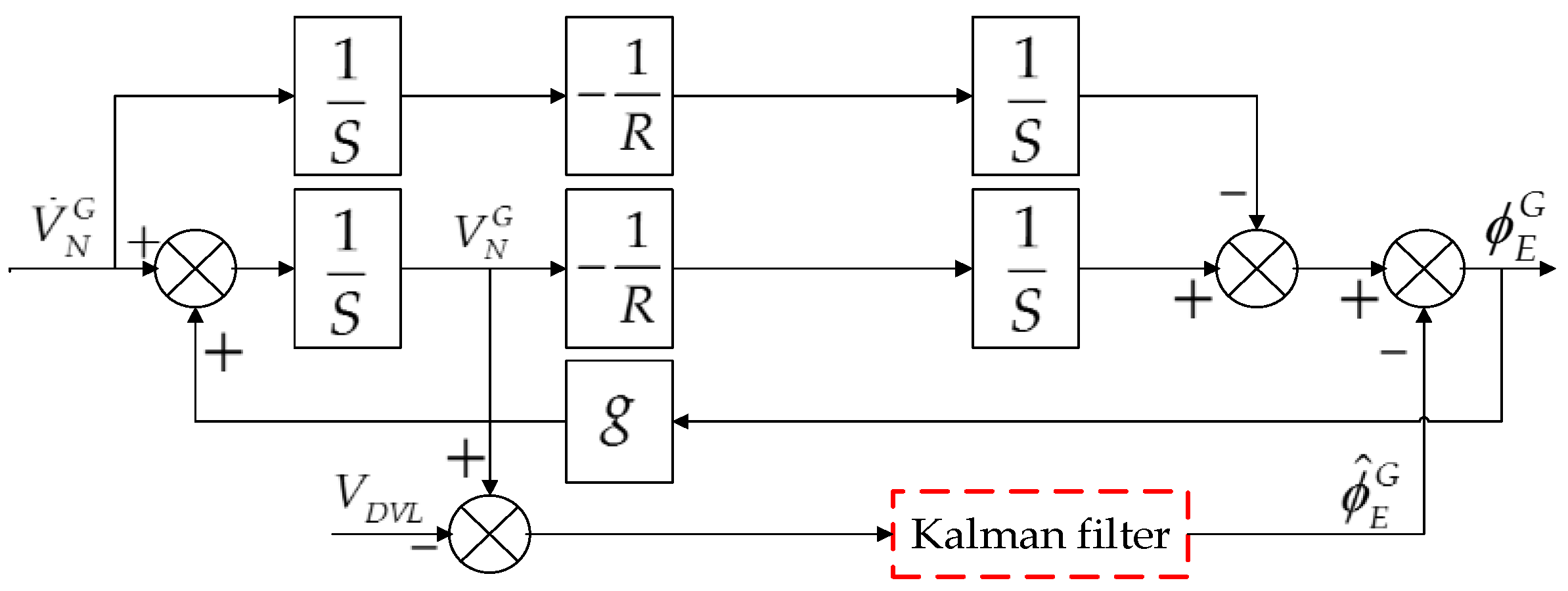
3.1. The Error Model of the Marine Grid SINS
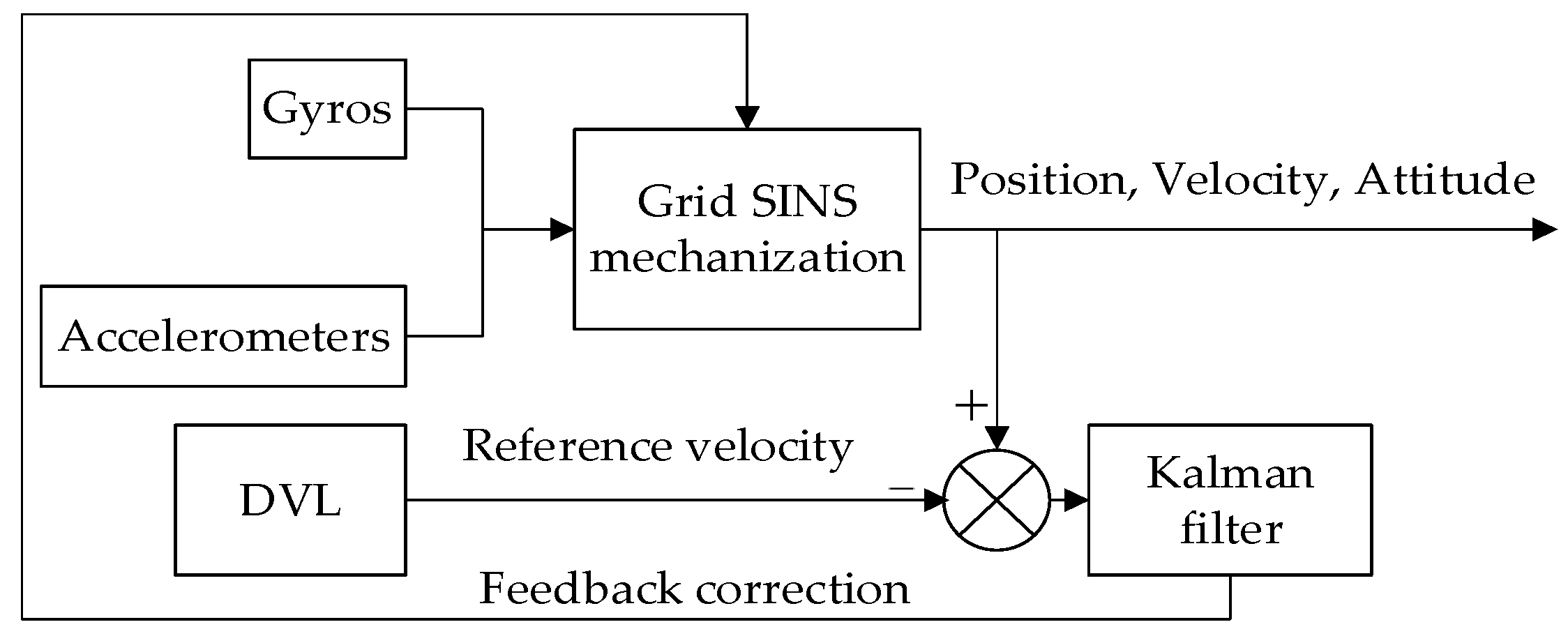
3.2. Kalman Filtering and Feedback Correction
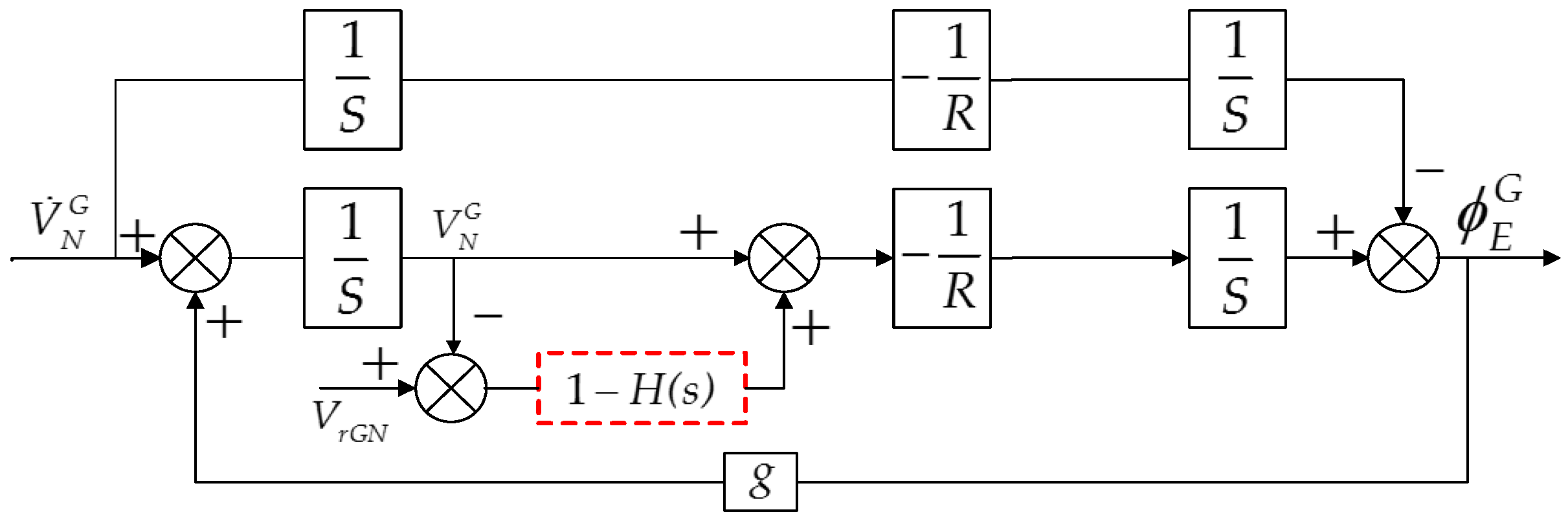
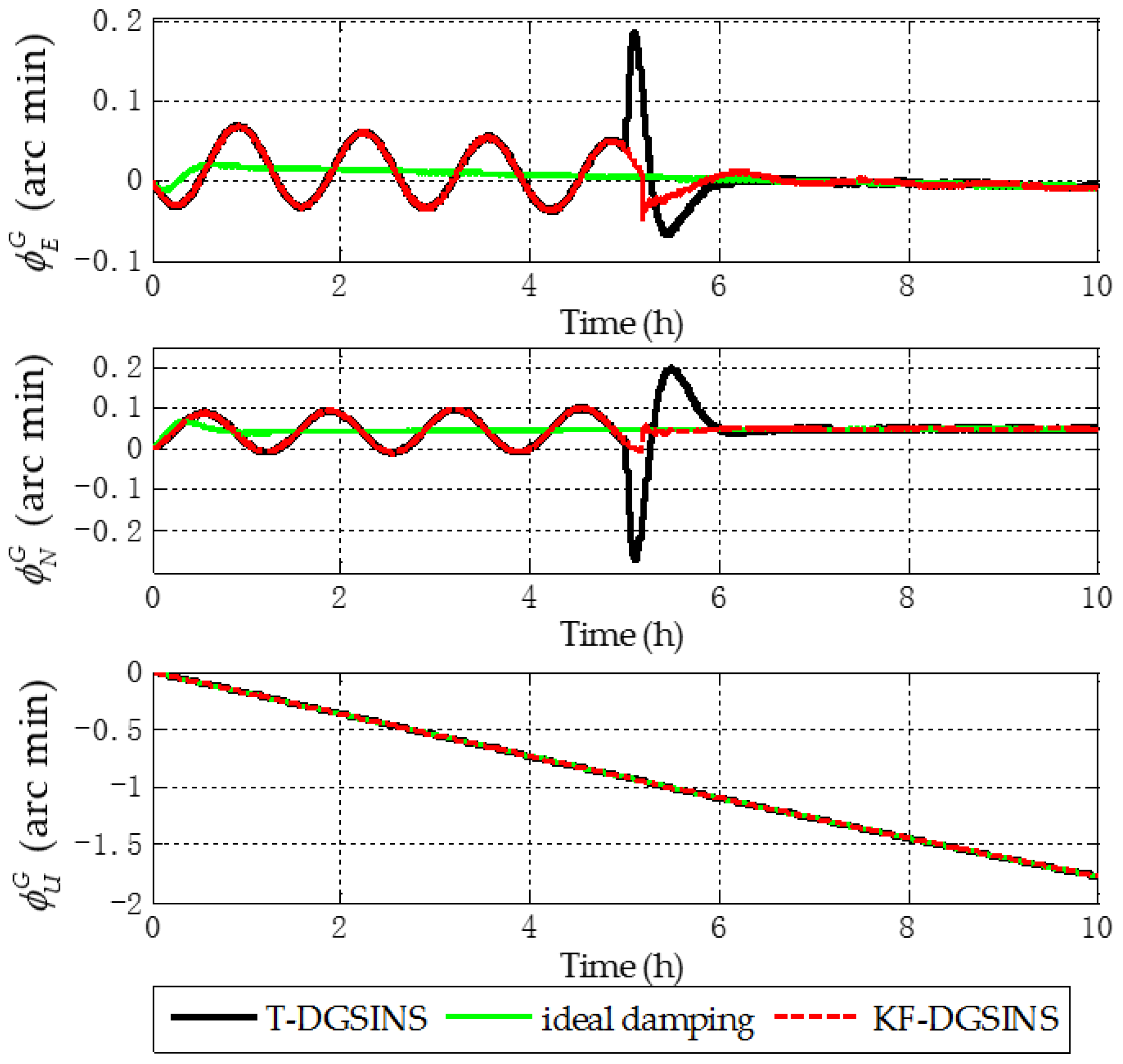
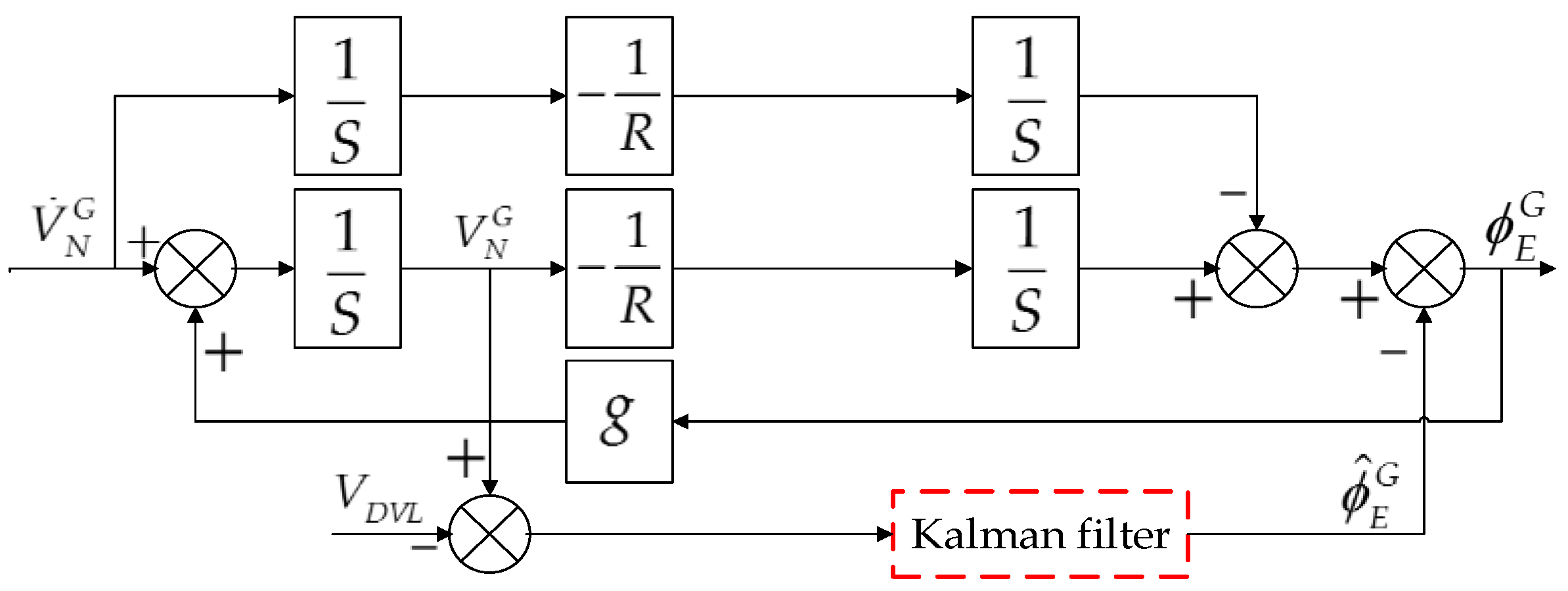
4. The T-DGSINS Algorithm
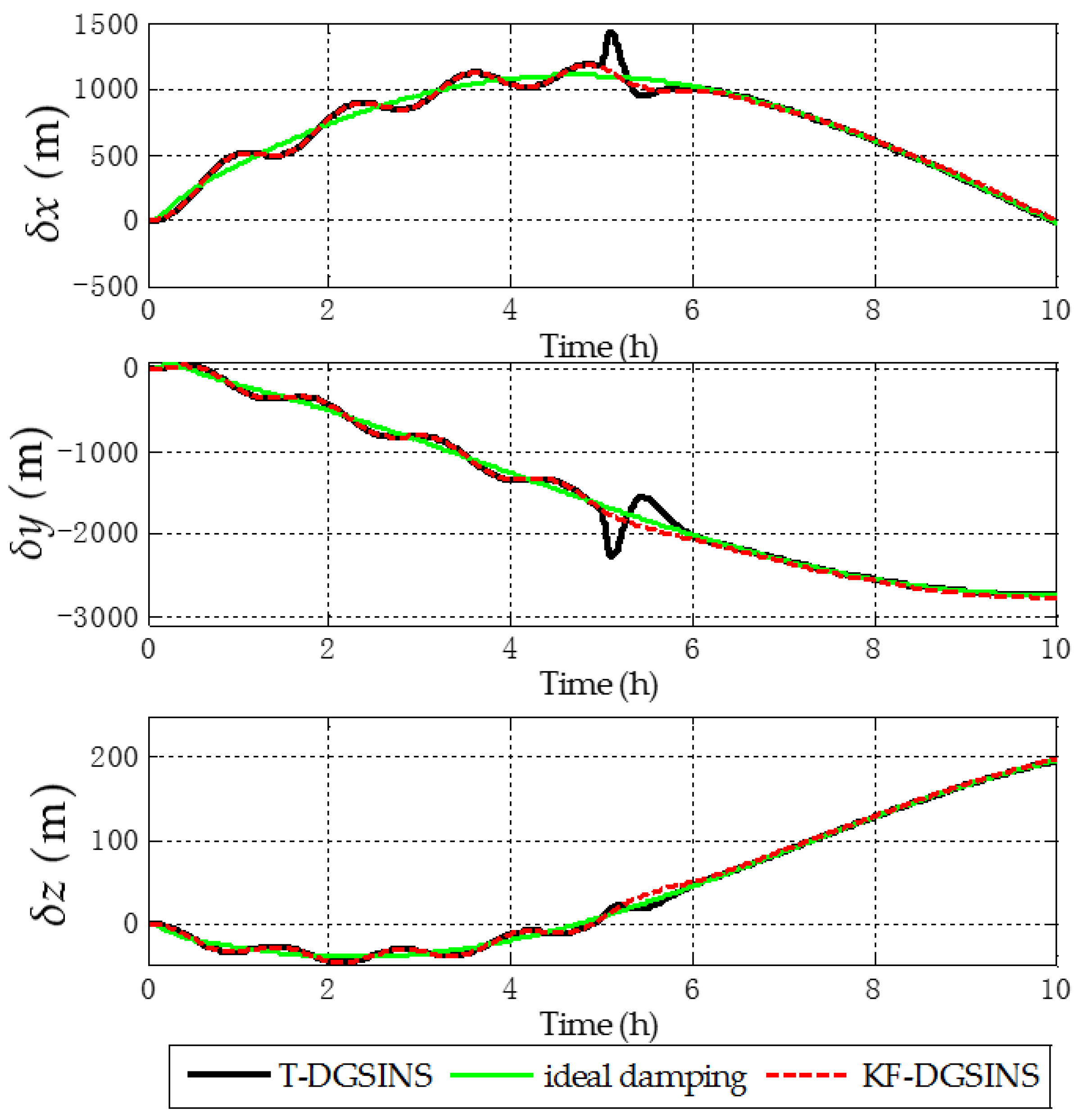
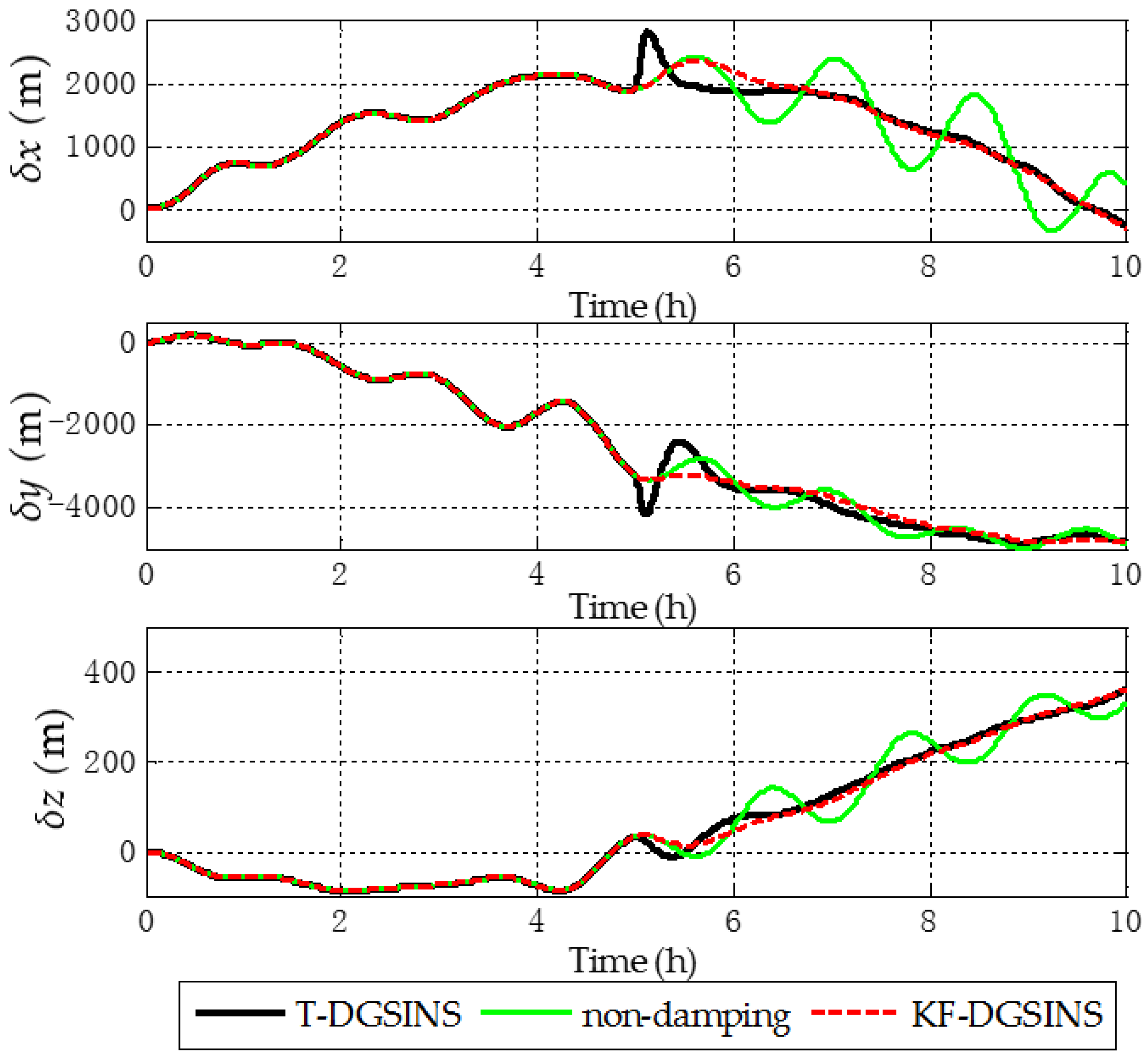
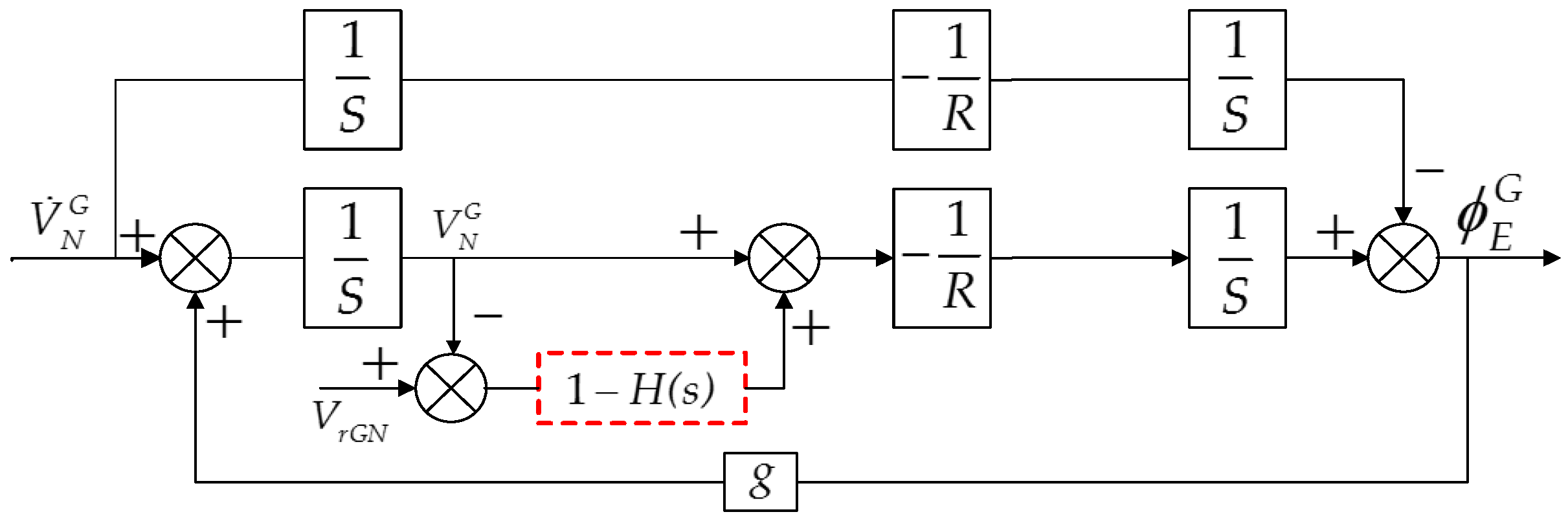
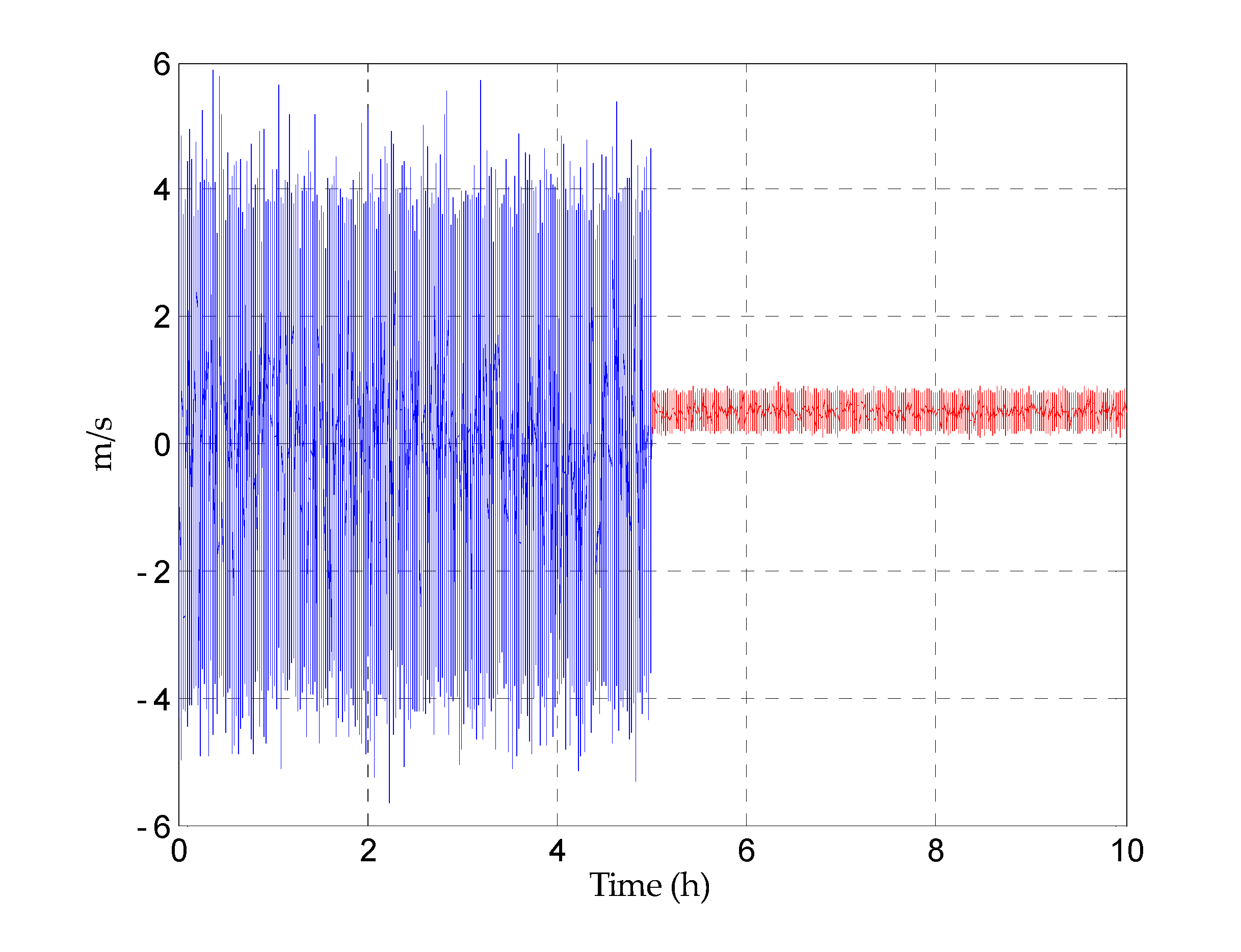
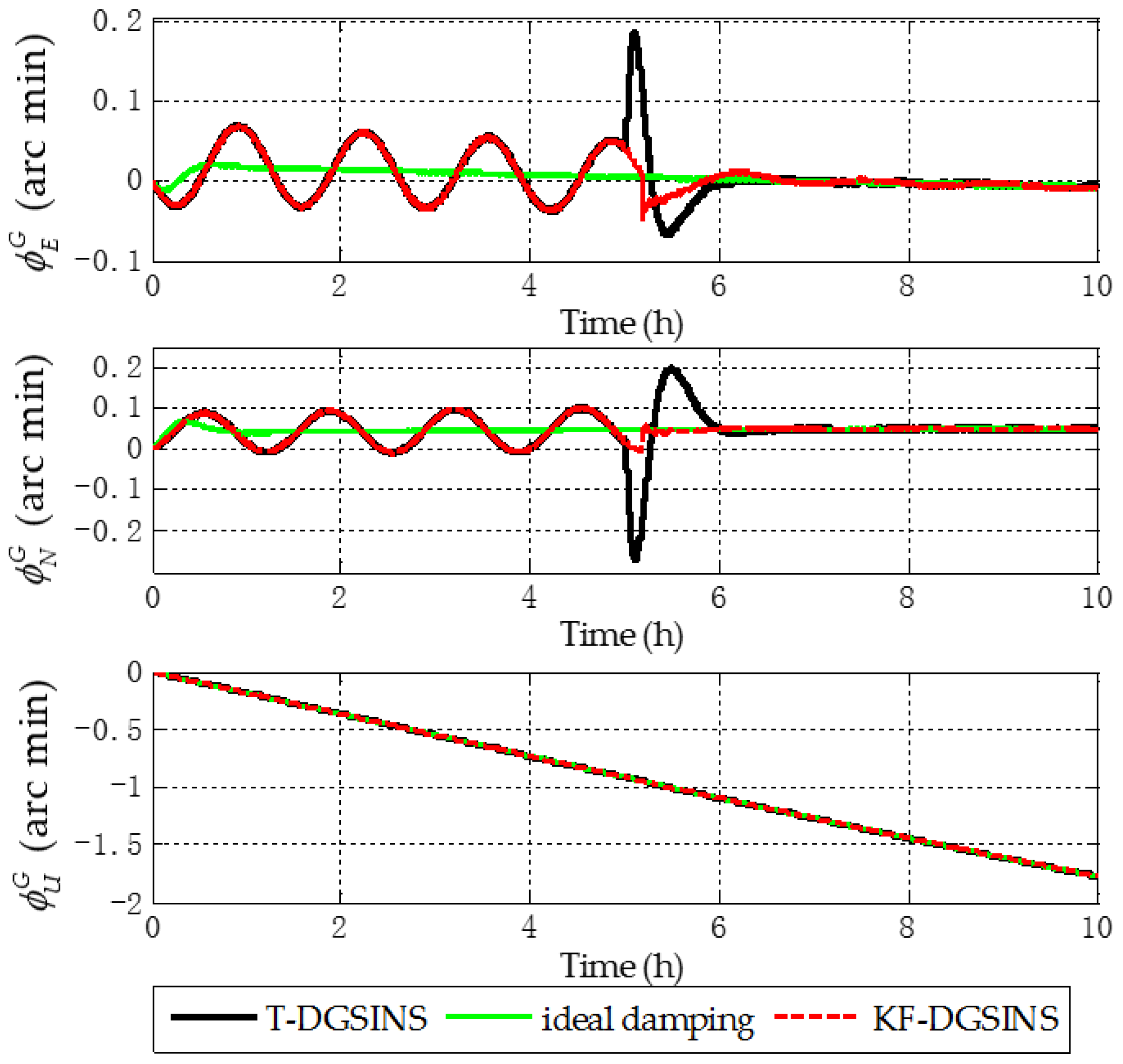
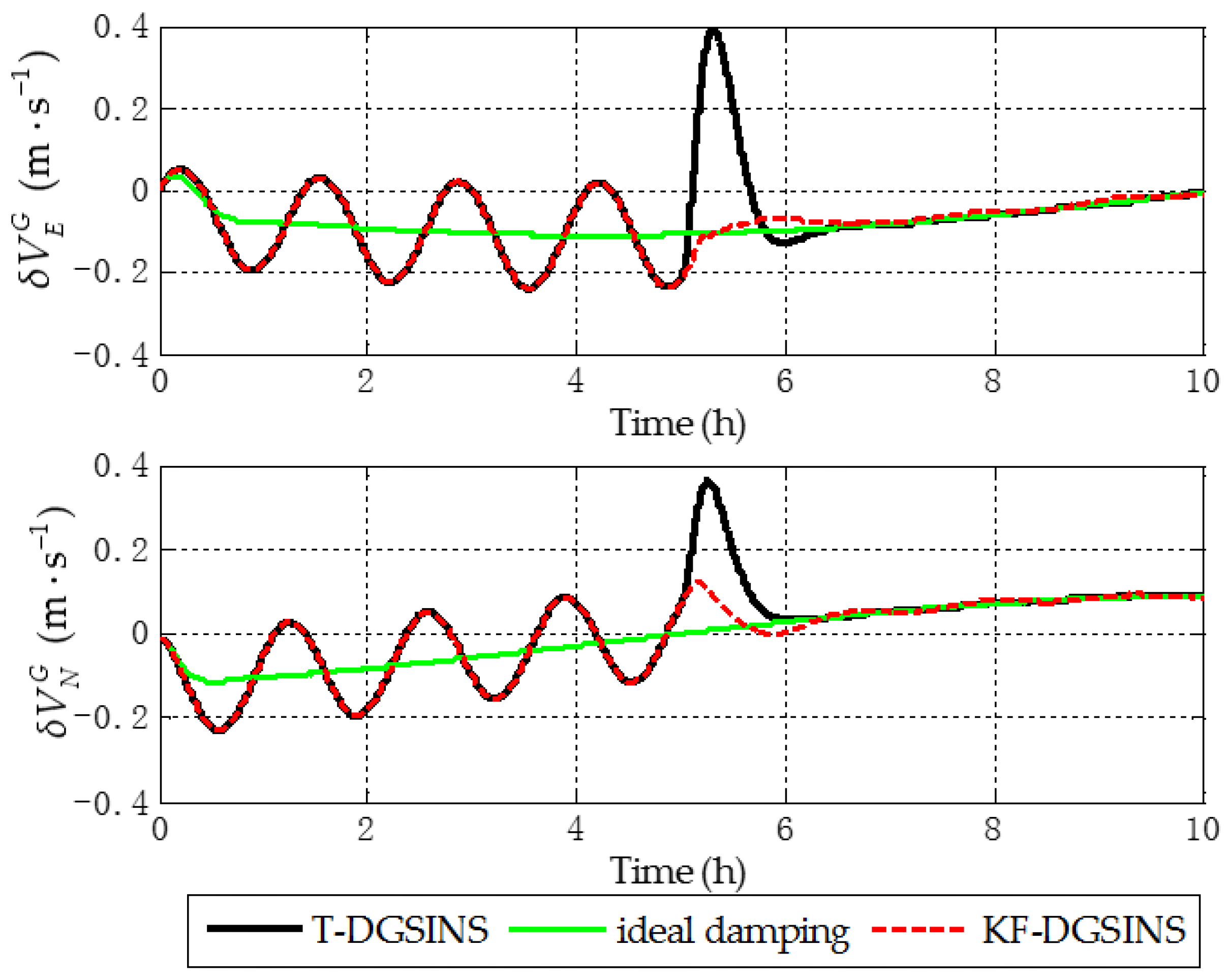
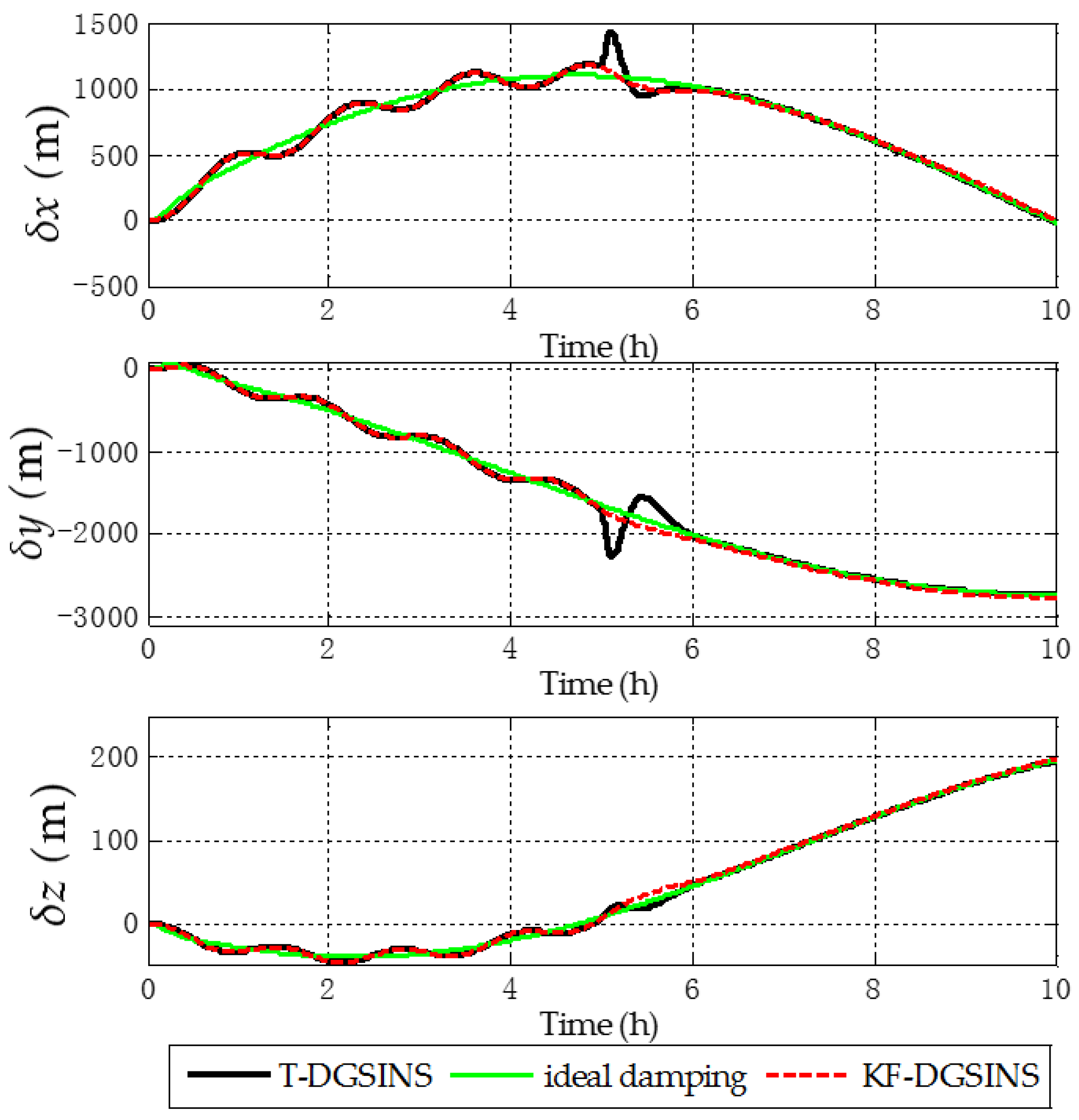
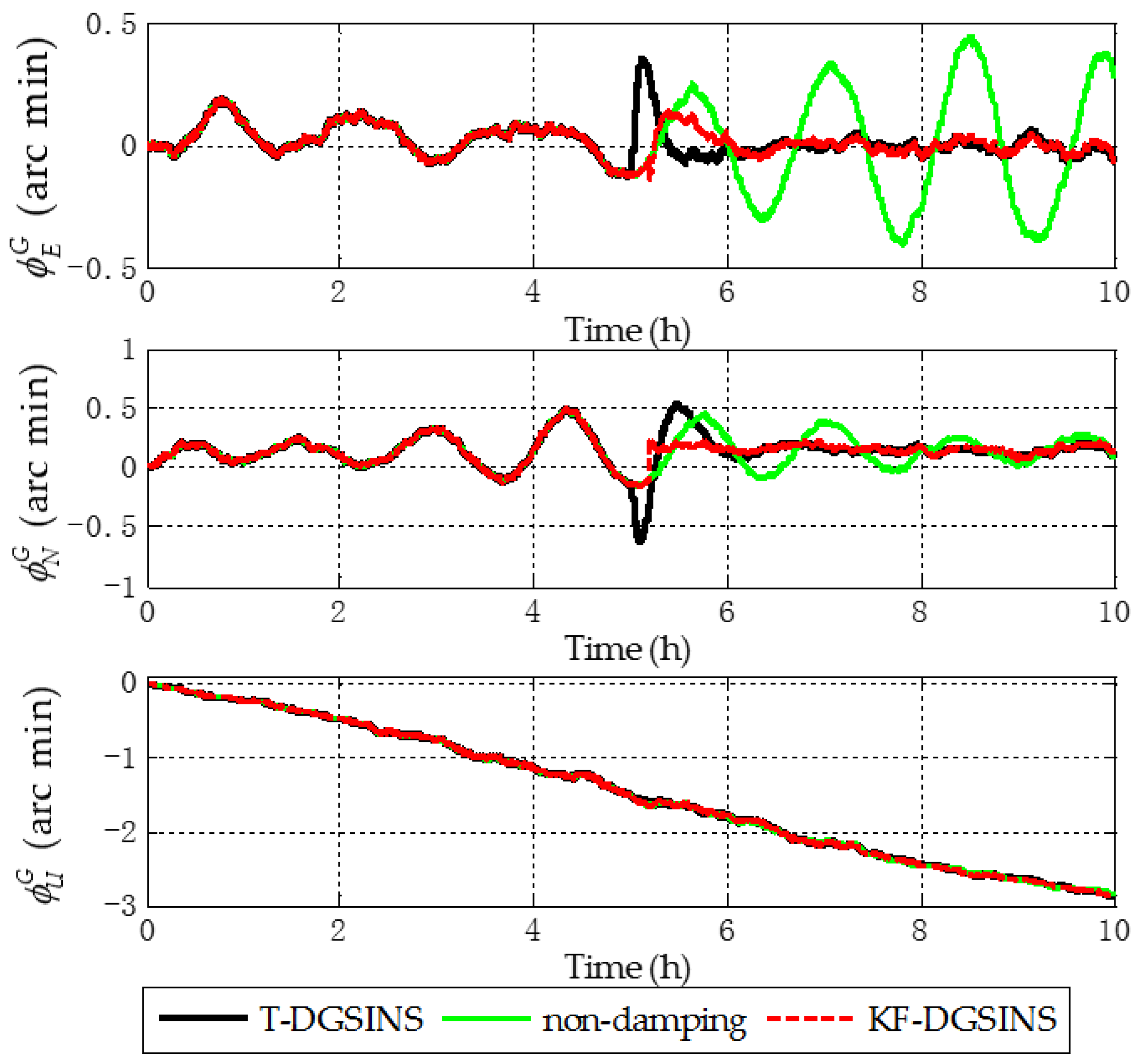
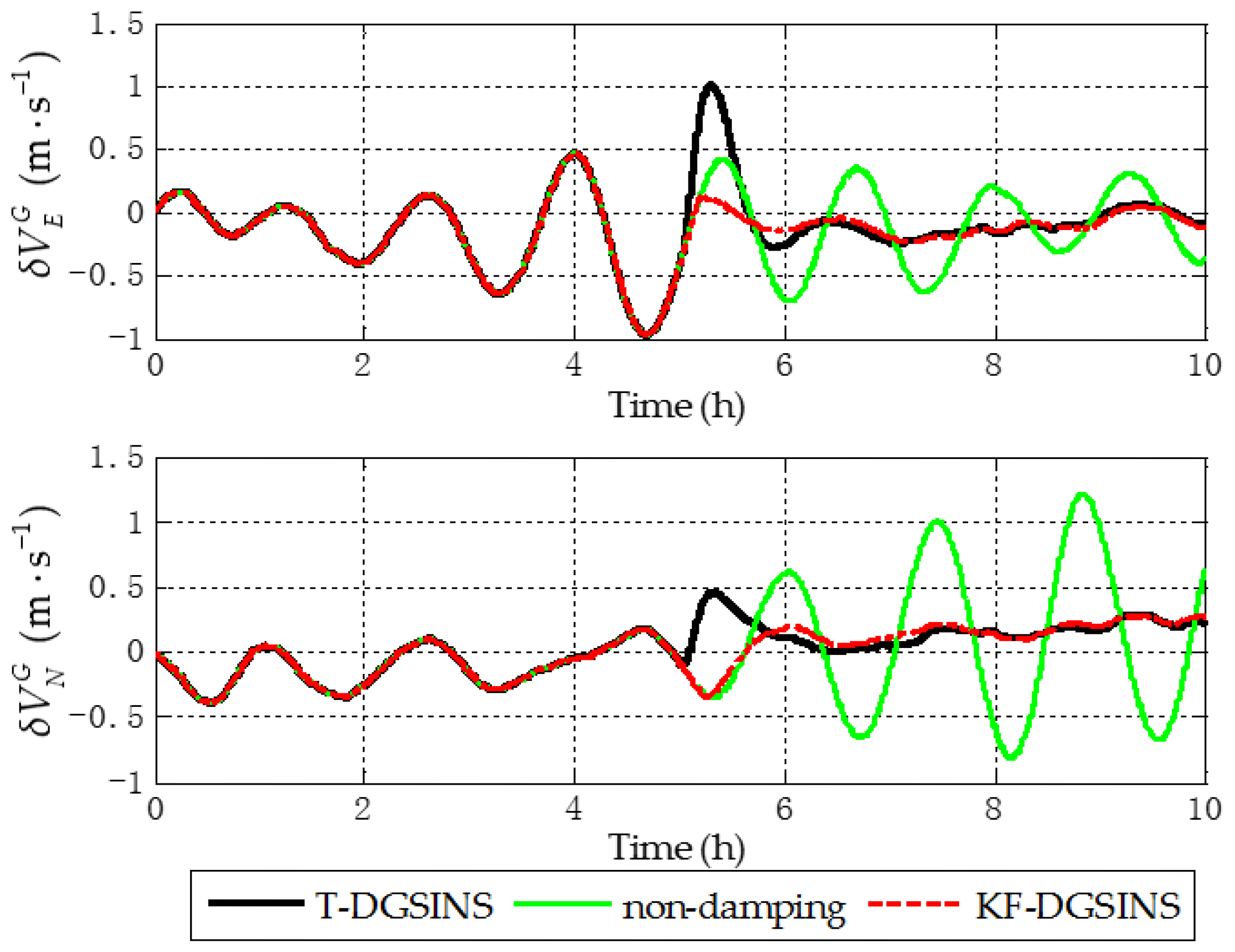
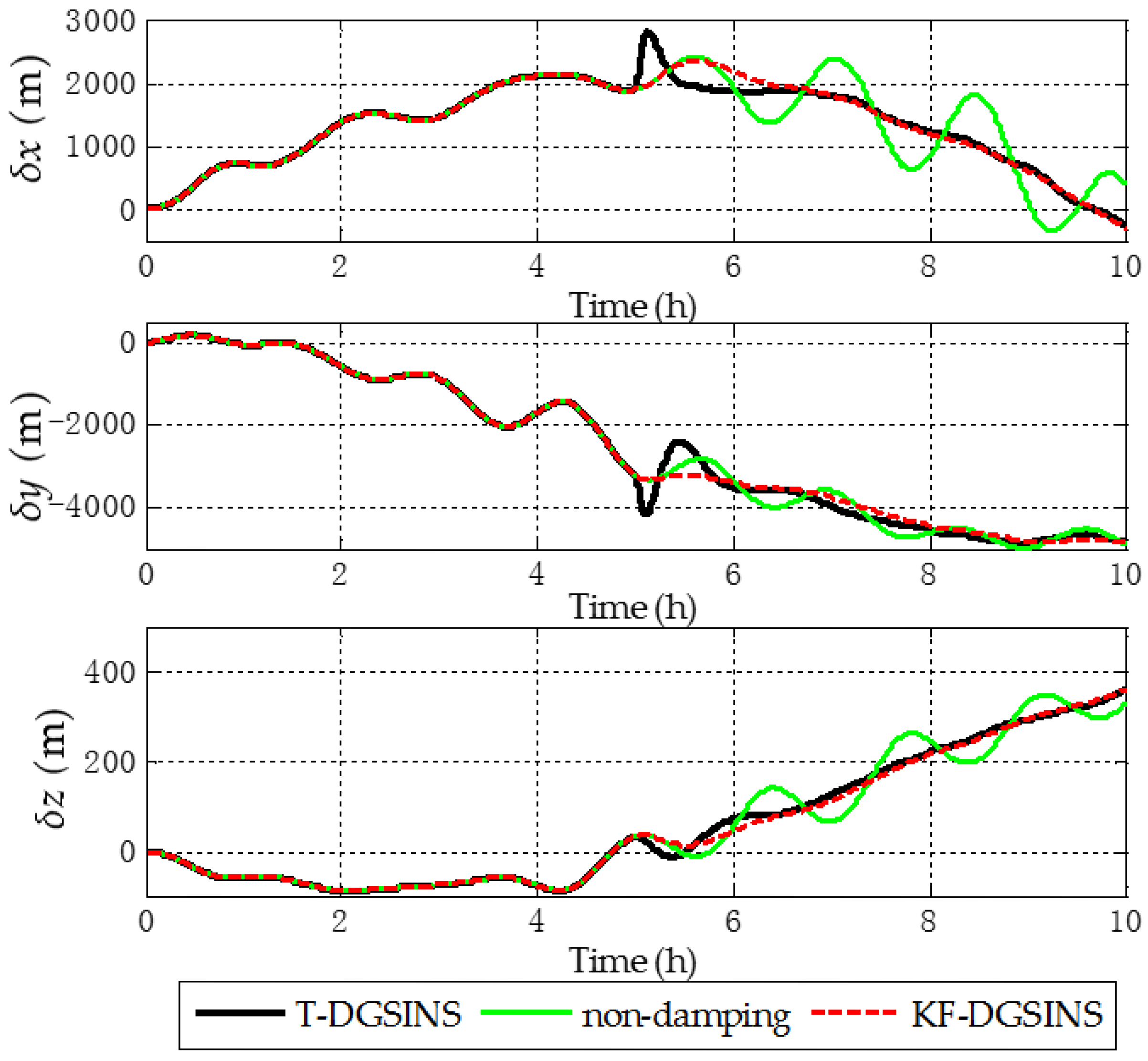
- The damping network added to the system breaks the applicability of the Schuler adjustment condition, and an equivalent step-function signal is introduced to the system when the state of the grid SINS is switched from the non-damping state to the external level damping state. Therefore, the error overshoot phenomenon exists in the state switching process, and the navigation results cannot be used for a certain period of time.
- T-DGSINS is designed based on the conditions of a single-input-single-output system (SISO), so the coupling effects of each calculating circuit cannot be solved.
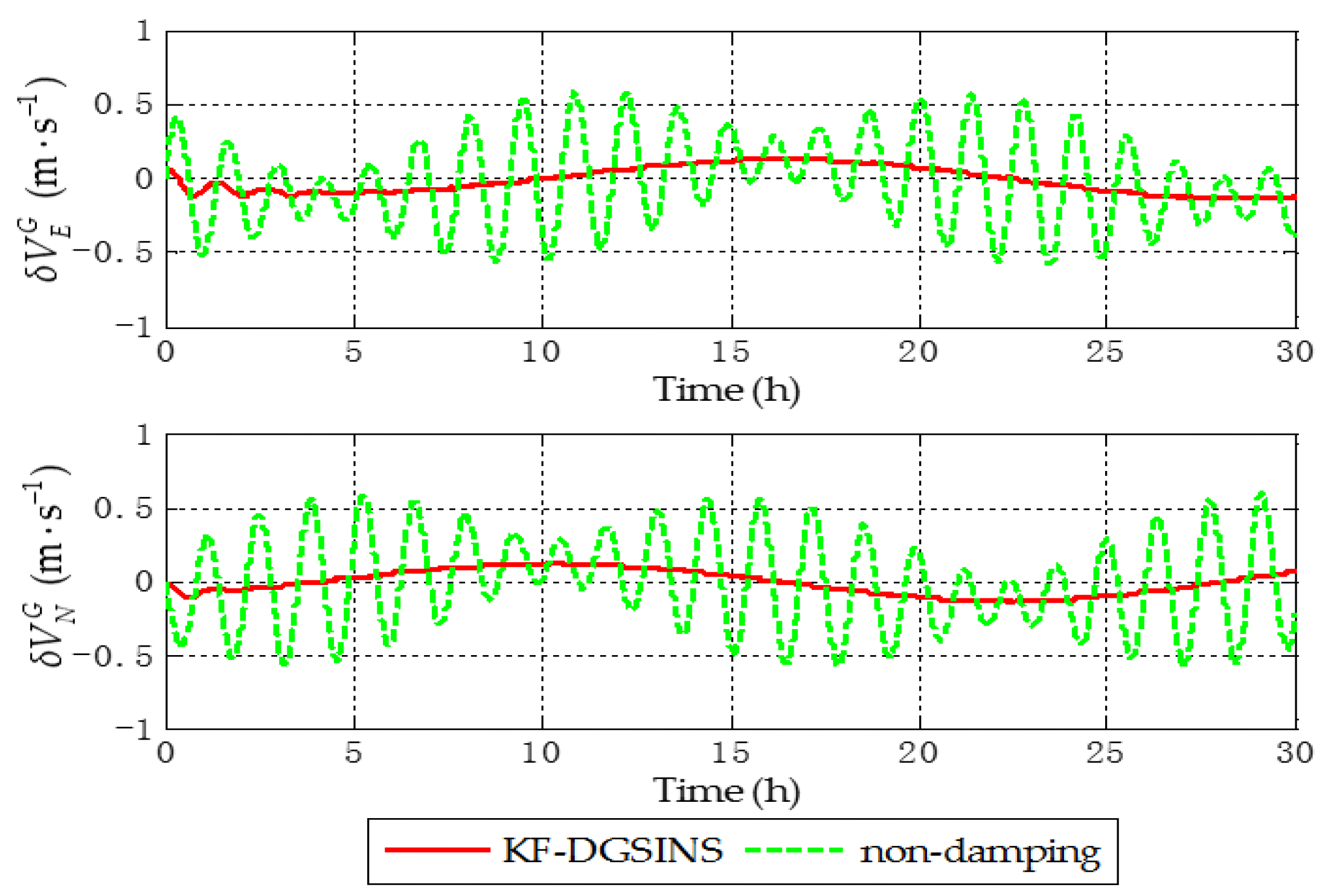
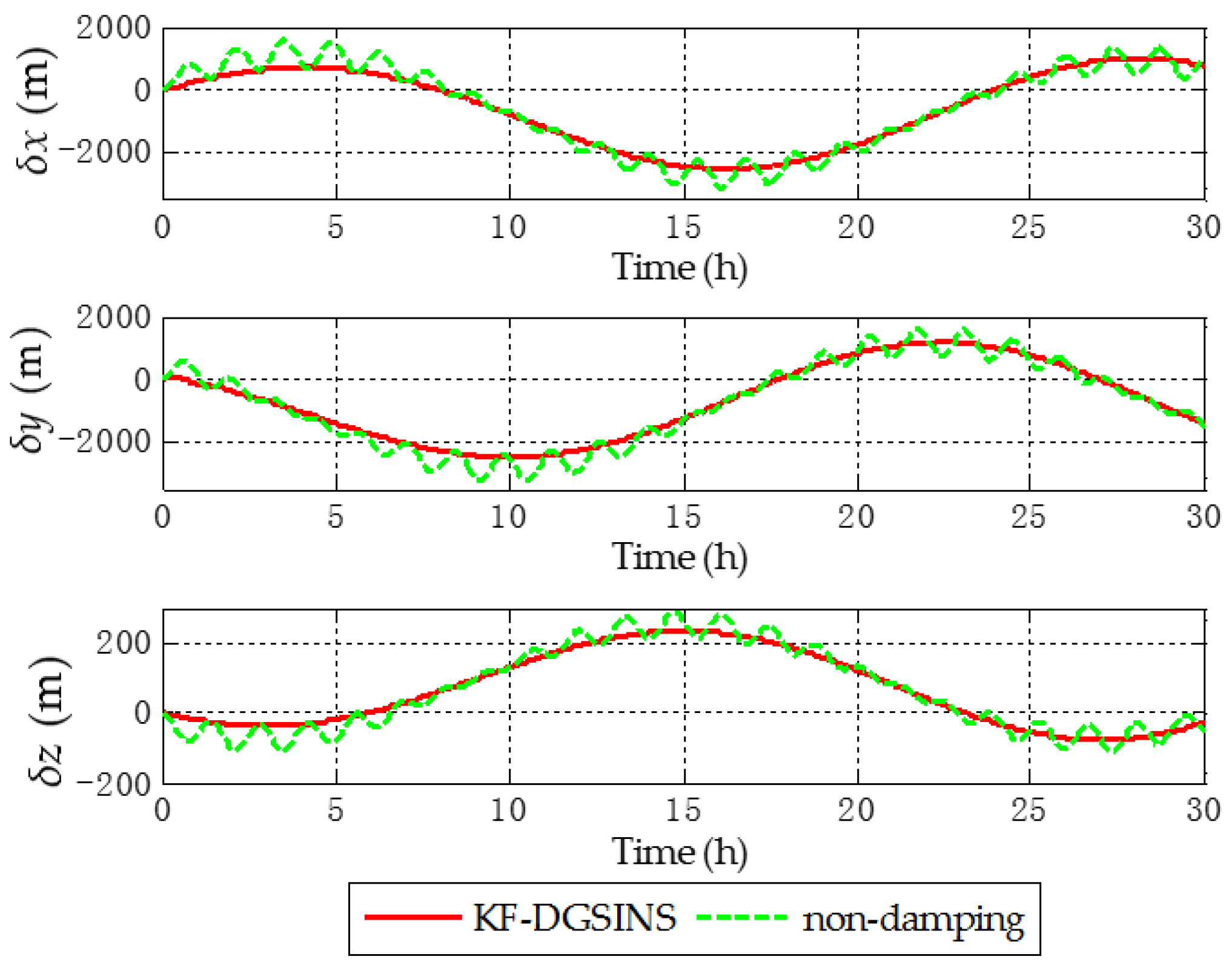
5. Simulation Results and Discussions
5.1. Simulation Results and Discussions
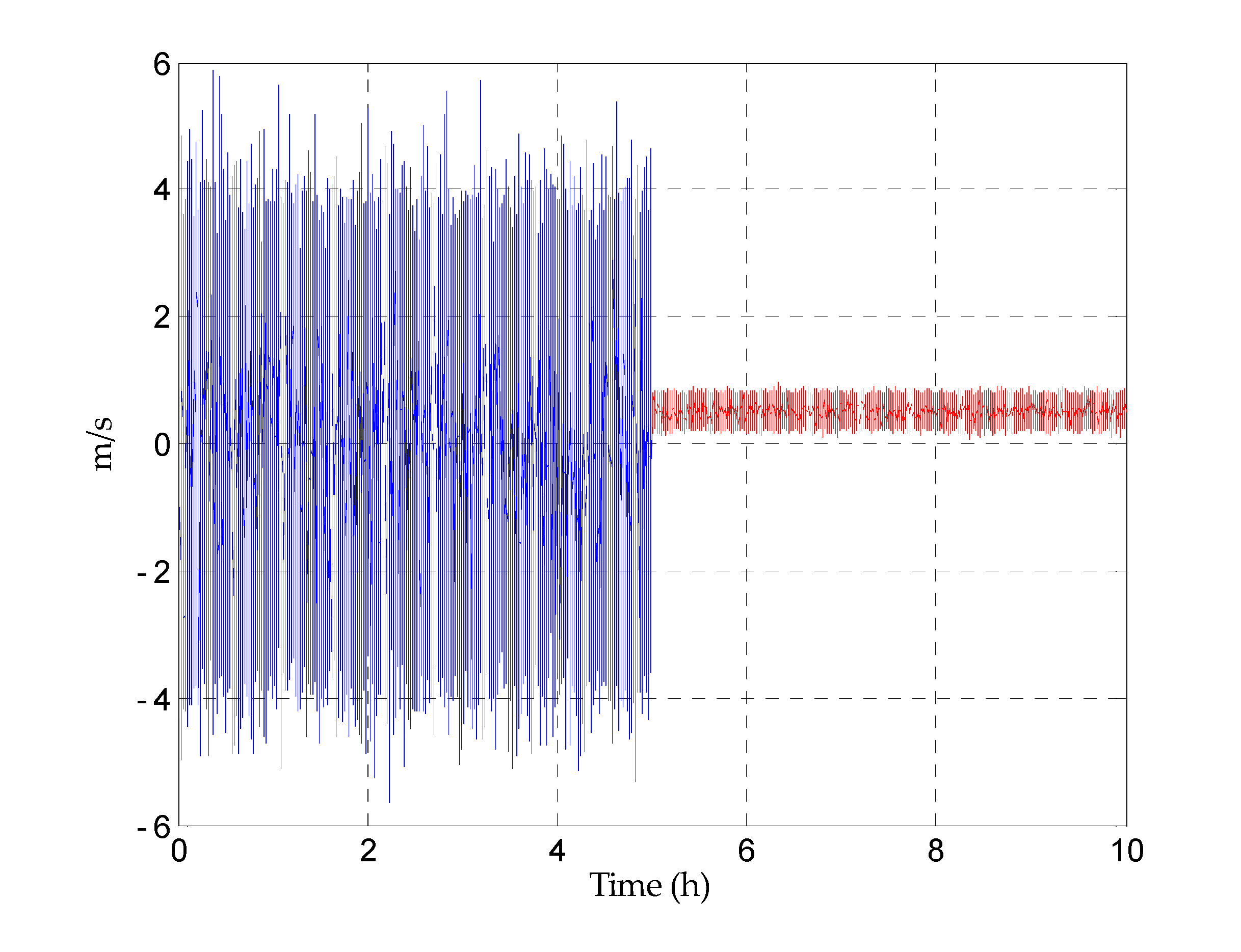
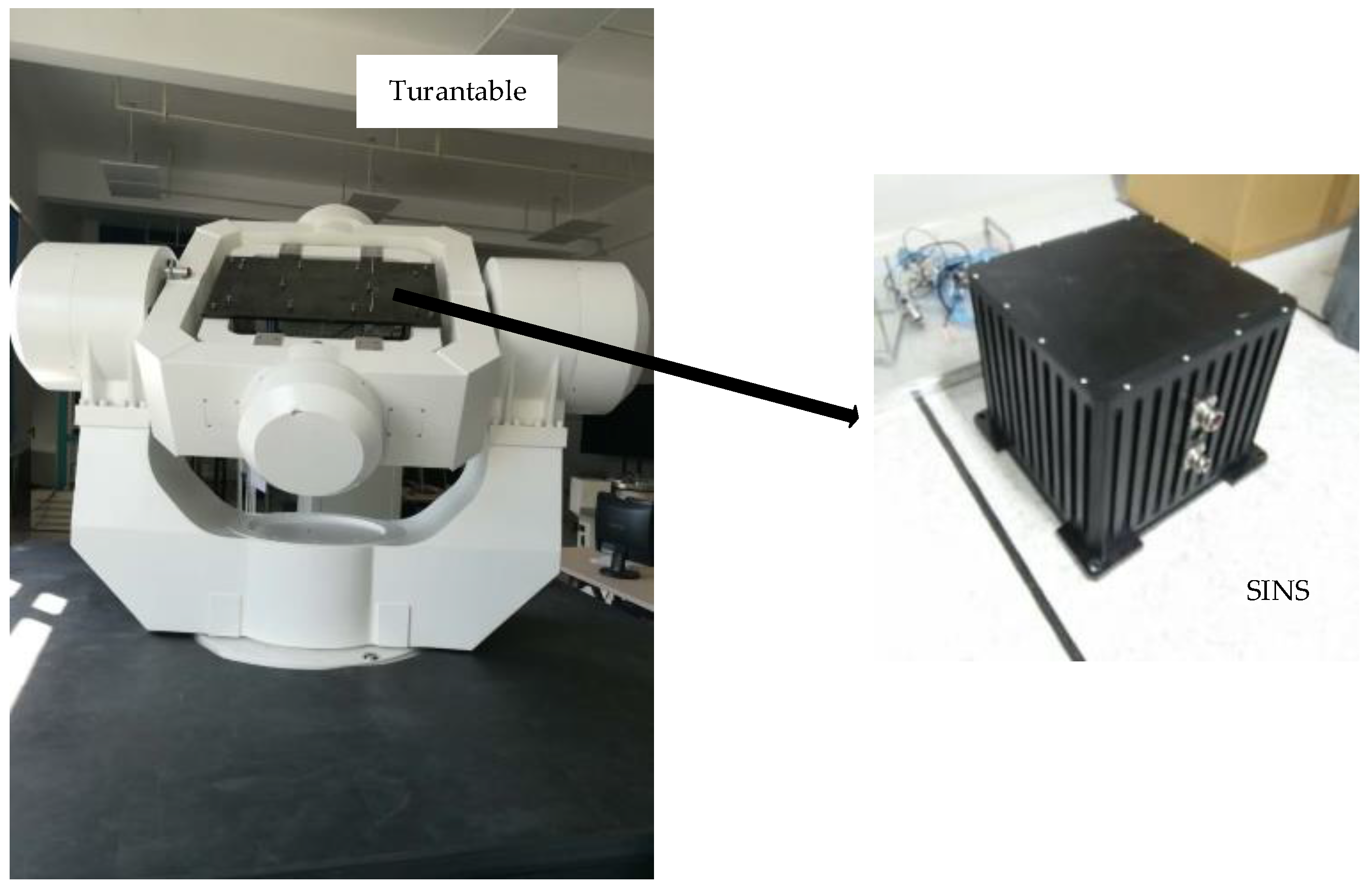
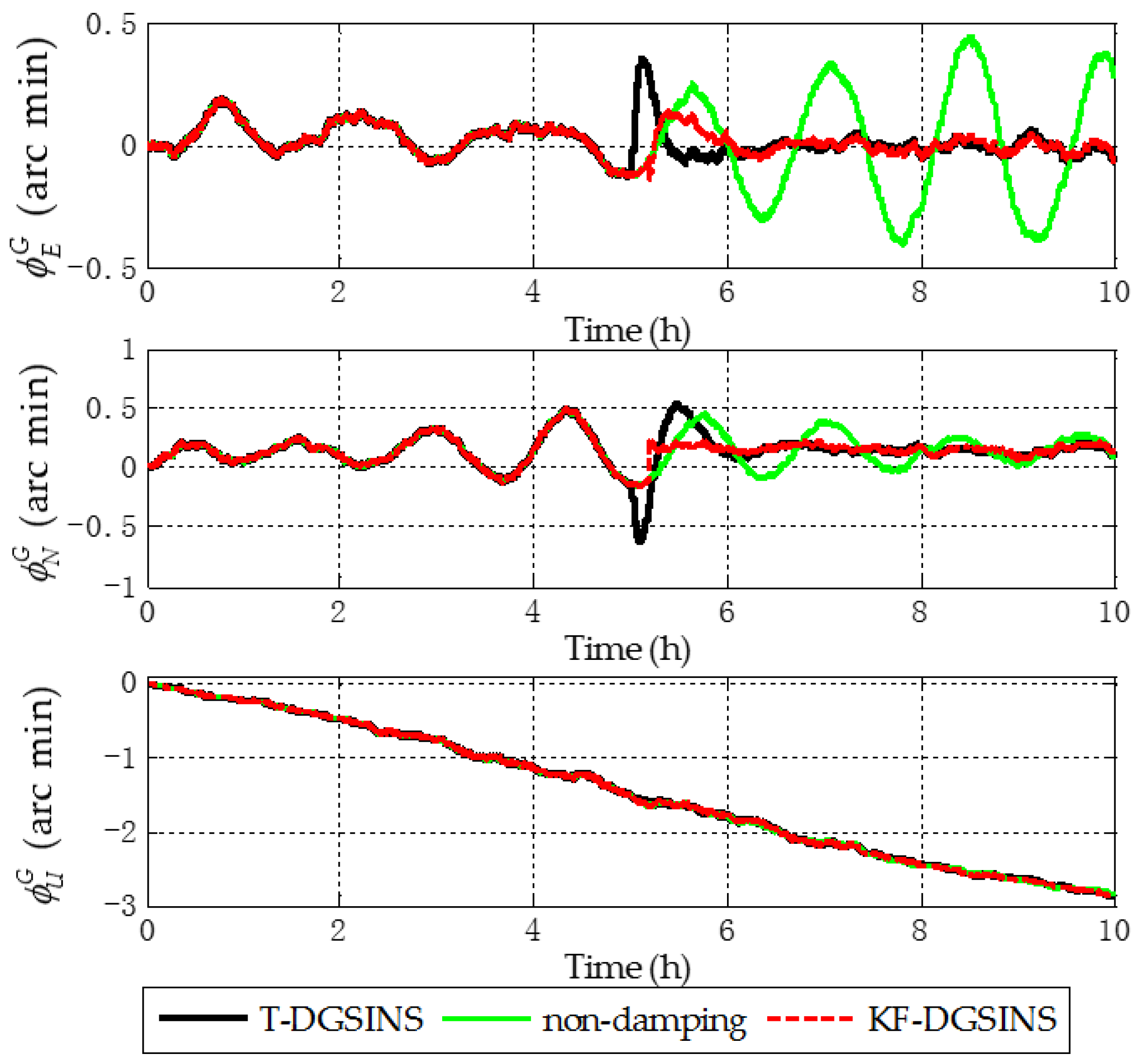
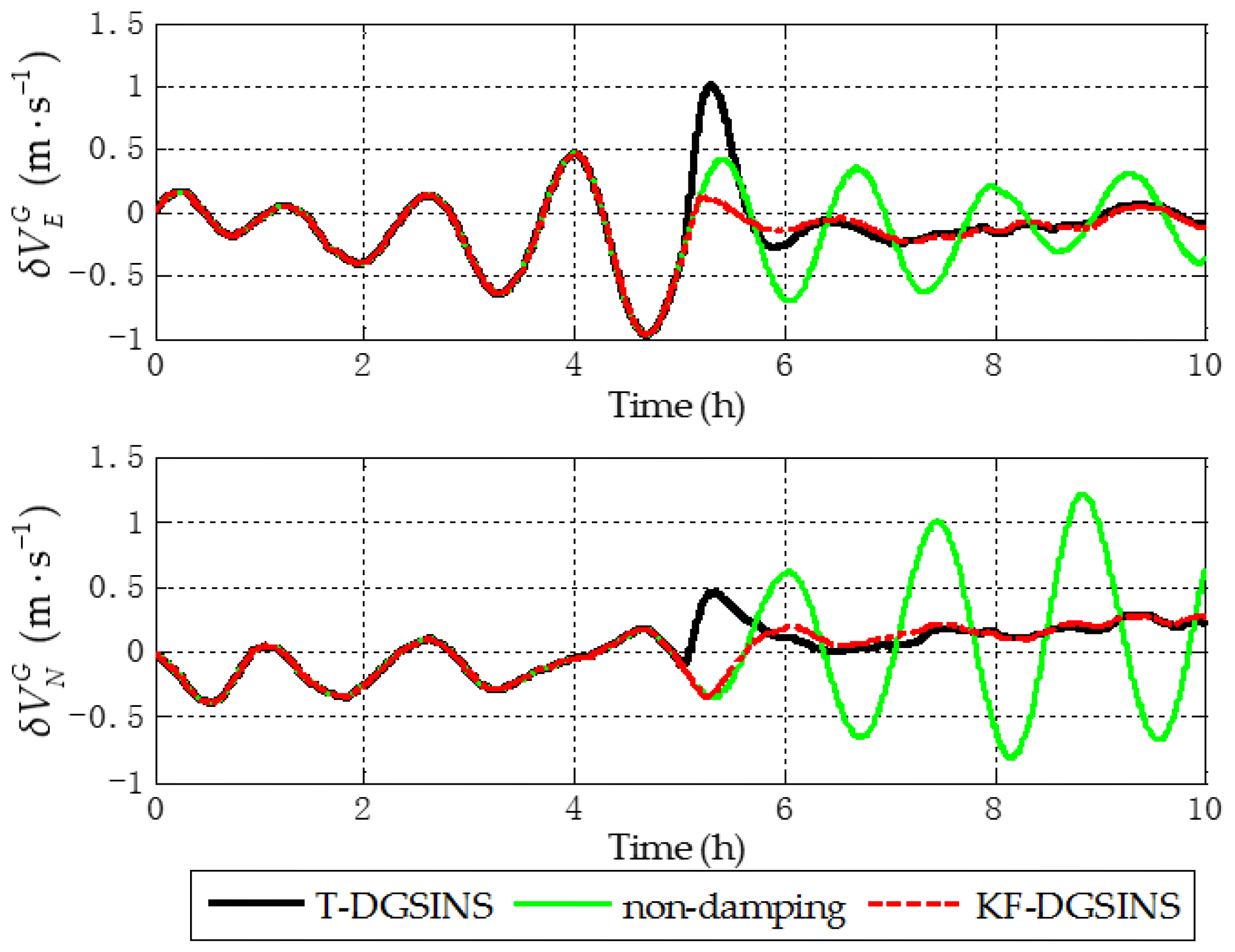
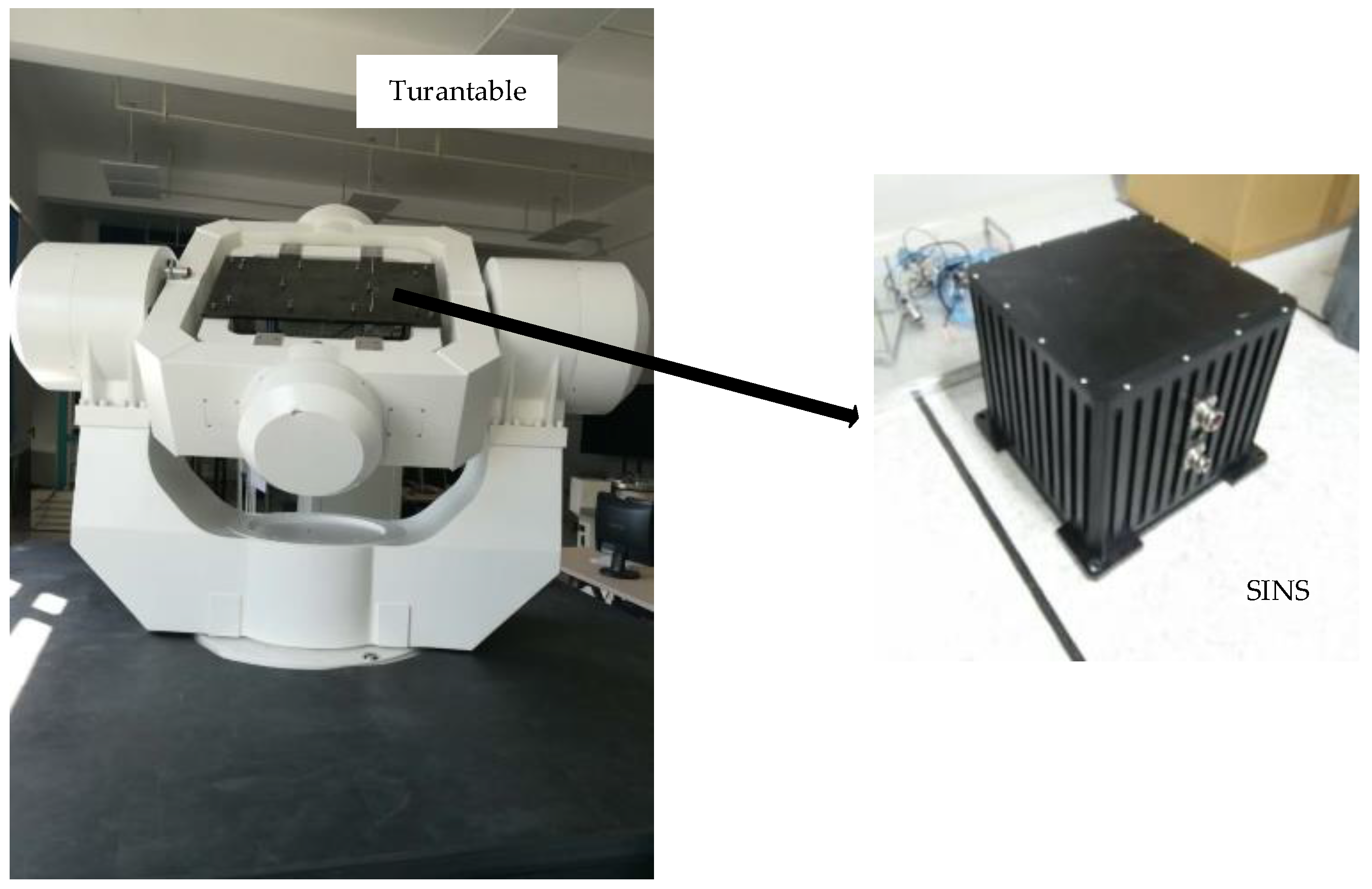
5.2. Semi-Physical Simulation Results and Discussions
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Cheng, J.H.; Wang, T.D.; Guan, D.X.; Li, M.L. Polar transfer alignment of shipborne SINS with a large misalignment angle. Meas. Sci. Technol. 2016, 27, 035101. [Google Scholar] [CrossRef]
- Li, Q.; Ben, Y.Y.; Sun, F.; Huo, L. Transversal strapdown INS and damping technology for marine in polar region. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2014; pp. 1365–1370. [Google Scholar]
- Chang, L.B.; Li, Y.; Xue, B.Y. Initial Alignment for Doppler Velocity Log aided Strapdown Inertial Navigation System with Limited Information. IEEE ASME Trans. Mechatron. 2016, 22, 329–338. [Google Scholar] [CrossRef]
- Sun, W.; Gao, Y. Fiber-based rotary strapdown inertial navigation system. Opt. Eng. 2013, 52, 076106. [Google Scholar] [CrossRef]
- Silva, F.O.; Hemerly, E.M.; Leite Filho, W.C. On the Error State Selection for Stationary SINS Alignment and Calibration Kalman Filters-Part II: Observability/Estimability Analysis. Sensors 2017, 17, 439. [Google Scholar] [CrossRef] [PubMed]
- Lyon, W.K. The Navigation of Arctic Polar Submarines. J. Navig. 1984, 37, 155–179. [Google Scholar] [CrossRef]
- Tazartes, D.A. Inertial Navigation: From Gimbaled Platforms to Strapdown Sensors. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2292–2299. [Google Scholar] [CrossRef]
- Ren, C.H.; Pan, Y.J.; He, T.; Xiong, N.X. Research and implementation of a new orientation & incline instrument used in oil and gas wells. In Proceedings of the International Conference on Electronic Measurement & Instruments, Beijing, China, 16–19 August 2009; pp. 1027–1030. [Google Scholar]
- Bekir, E. Introduction to Modern Navigation Systems; World Scientific: New Jersey, NJ, USA, 2007; pp. 1–6. [Google Scholar]
- Hedman, E.L. A high-accuracy relationship between geocentric Cartesian coordinates and geodetic latitude and altitude. J. Spacecr. Rocket. 1970, 7, 993–995. [Google Scholar] [CrossRef]
- Papazoglou, M.; Tsioras, C. Intergrated SAR/GPS/INS for target geolocation improvement. J. Comput. Model. 2014, 4, 267–298. [Google Scholar]
- Andreev, A.G.; Ermakov, V.C.; Mafter, M.B.; Kokorin, V.I.; Rumyantsev, C.V. High Latitude Trials of Modern Russian Marine Compasses. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Coronado, CA, USA, 25–27 April 2006; pp. 636–644. [Google Scholar]
- Yao, Y.Q.; Xu, X.S.; Tong, J.W. Indirect transversal inertial navigation algorithm in polar region. J. Chin. Inert. Technol. 2015, 23, 29–34. [Google Scholar] [CrossRef]
- Li, Q.; Ben, Y.Y.; Yu, F.; Tan, J.B. Transversal Strapdown INS Based on Reference Ellipsoid for Vehicle in the Polar Region. IEEE Trans. Veh. Technol. 2016, 65, 7791–7795. [Google Scholar] [CrossRef]
- Tal, A.; Klein, I.; Katz, R. Inertial Navigation System/Doppler Velocity Log (INS/DVL) Fusion with Partial DVL Measurements. Sensors 2017, 17, 415. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Q.; Qin, Y.Y.; Fu, Q.W.; Yue, Y.Z. Grid mechanization in inertial navigation systems for transpolar aircraft. J. Northwest. Polytech. Univ. 2013, 31, 210–217. [Google Scholar]
- Qin, Y.Y. Inertial Navigation; National Defence Industry Press: Beijing, China, 1986; pp. 213–217. [Google Scholar]
- Klein, I.; Diamant, R. Observability Analysis of DVL/PS Aided INS for a Maneuvering AUV. Sensors 2015, 15, 26818–26837. [Google Scholar] [CrossRef] [PubMed]
- Tang, K.H.; Wang, J.L.; Li, W.L.; Wu, W.Q. A Novel INS and Doppler Sensors Calibration Method for Long Range Underwater Vehicle Navigation. Sensors 2013, 13, 14583–14600. [Google Scholar] [CrossRef] [PubMed]
- Gao, W.; Zhang, Y.; Ben, Y.Y.; Sun, Q. An automatic compensation method for states switch of strapdown inertial navigation system. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Myrtle Beach, SC, USA, 23–26 April 2012; pp. 814–817. [Google Scholar]
- Li, K.; Liu, F.; Xu, Y.F. Research on Internal Damping Algorithm of Marine Inertial Navigation System. Commun. Comput. Inf. Sci. 2011, 135, 256–261. [Google Scholar] [CrossRef]
- Huang, W.Q.; Hao, Y.L.; Cheng, J.H.; Li, G.; Fu, J.G.; Bu, X.B. Research of the inertial navigation system with variable damping coefficients horizontal damping networks. In Proceedings of the MTTS/IEEE Techno-Ocean ’04, Kobe, Japan, 9–12 November 2004; pp. 1272–1276. [Google Scholar]
- Zheng, Z.C.; Yue, J. A Novel GPS/INS Loose Integrated Navigation Algorithm. Adv. Mater. Res. 2013, 823, 479–484. [Google Scholar] [CrossRef]
- Huang, D.M.; Cheng, L. Inertial Navigation System; National Defense Industrial Press: Beijing, China, 1986; pp. 108–125. [Google Scholar]
- Grammatikos, A.; Schuler, A.R.; Fegley, K.A. Damping Gimballess Inertial Navigation Systems. IEEE Trans. Aerosp. Electron. Syst. 1967, 3, 481–493. [Google Scholar] [CrossRef]
- Zhao, L.; Li, J.S.; Cheng, J.H.; Hao, Y. Damping strapdown inertial navigation system based on a Kalman filter. Meas. Sci. Technol. 2016, 27, 115102. [Google Scholar] [CrossRef]
- Sun, J.; Xu, X.; Liu, Y.; Zhang, T.; Li, Y.; Tong, J. An Adaptive Damping Network Designed for Strapdown Fiber Optic Gyrocompass System for Ships. Sensors 2017, 17, 494. [Google Scholar] [CrossRef] [PubMed]
- Zhao, L.; Wang, X.X.; Ding, J.C.; Cao, W. Overview of nonlinear filter methods applied in integrated navigation system. J. Chin. Inertial Technol. 2009, 17, 46–52. [Google Scholar] [CrossRef]
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; John Wiley & Sons: Hoboken, NJ, USA, 2006; pp. 123–145. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Outer Axis | Middle Axis | Inner Axis | Unit | |
|---|---|---|---|---|
| Location accuracy of angular position | arc sec | |||
| Maximum angular rate | °/s | |||
| Rotation rate resolution | °/s |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, W.; Fang, T.; Luo, L.; Zhao, L.; Che, F. A Damping Grid Strapdown Inertial Navigation System Based on a Kalman Filter for Ships in Polar Regions. Sensors 2017, 17, 1551. https://doi.org/10.3390/s17071551
Huang W, Fang T, Luo L, Zhao L, Che F. A Damping Grid Strapdown Inertial Navigation System Based on a Kalman Filter for Ships in Polar Regions. Sensors. 2017; 17(7):1551. https://doi.org/10.3390/s17071551
Chicago/Turabian StyleHuang, Weiquan, Tao Fang, Li Luo, Lin Zhao, and Fengzhu Che. 2017. "A Damping Grid Strapdown Inertial Navigation System Based on a Kalman Filter for Ships in Polar Regions" Sensors 17, no. 7: 1551. https://doi.org/10.3390/s17071551
APA StyleHuang, W., Fang, T., Luo, L., Zhao, L., & Che, F. (2017). A Damping Grid Strapdown Inertial Navigation System Based on a Kalman Filter for Ships in Polar Regions. Sensors, 17(7), 1551. https://doi.org/10.3390/s17071551