Dynamic Speed Adaptation for Path Tracking Based on Curvature Information and Speed Limits †


Abstract
:1. Introduction
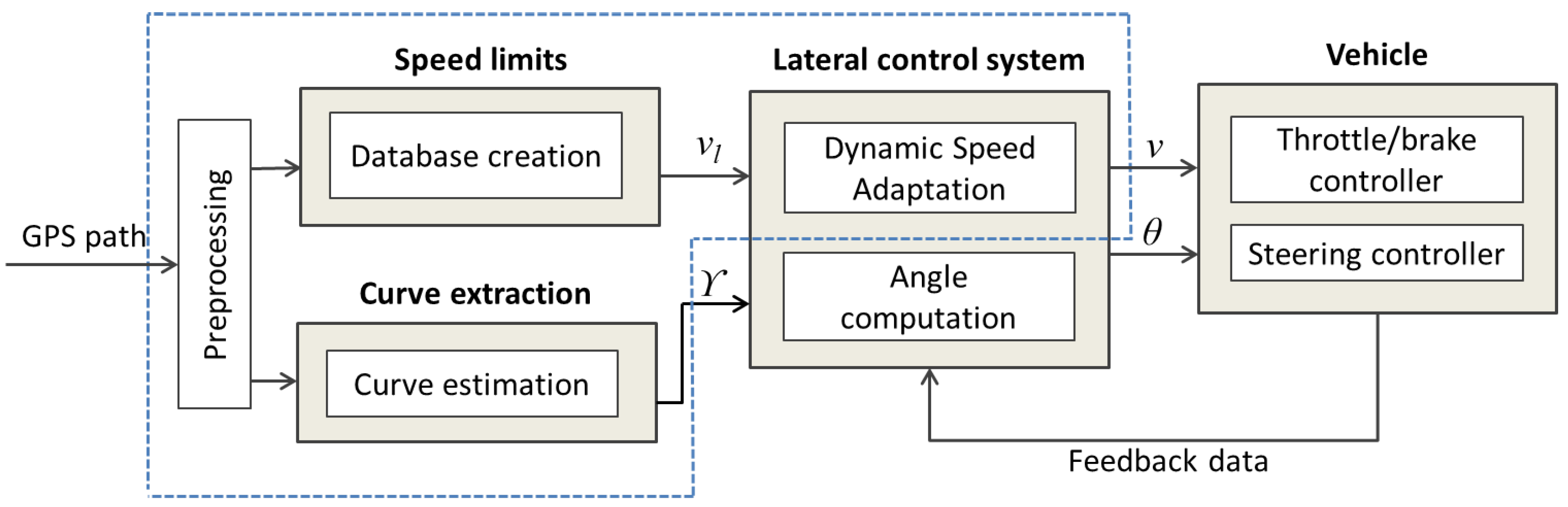
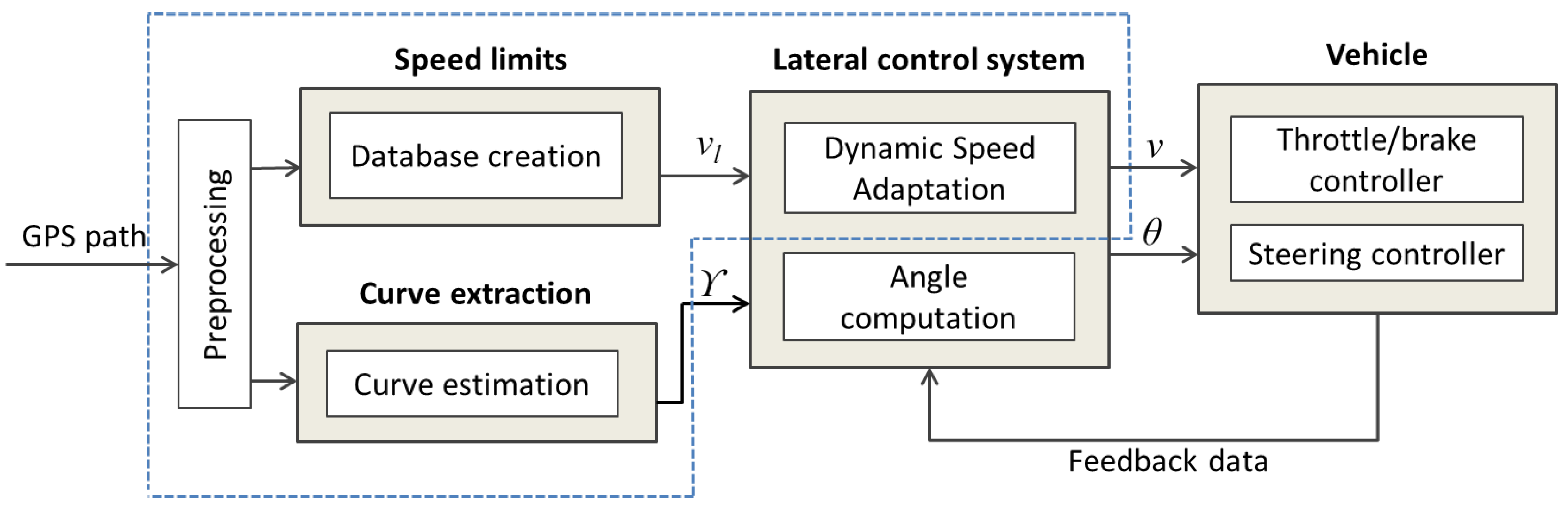
- preprocess the GPS path,
- extract position information of sharp curves and speed limit zones,
- compute the recommended speed for each sharp curve,
- obtain the speed limits for the path,
- analyze the current vehicle position in the traveled GPS path,
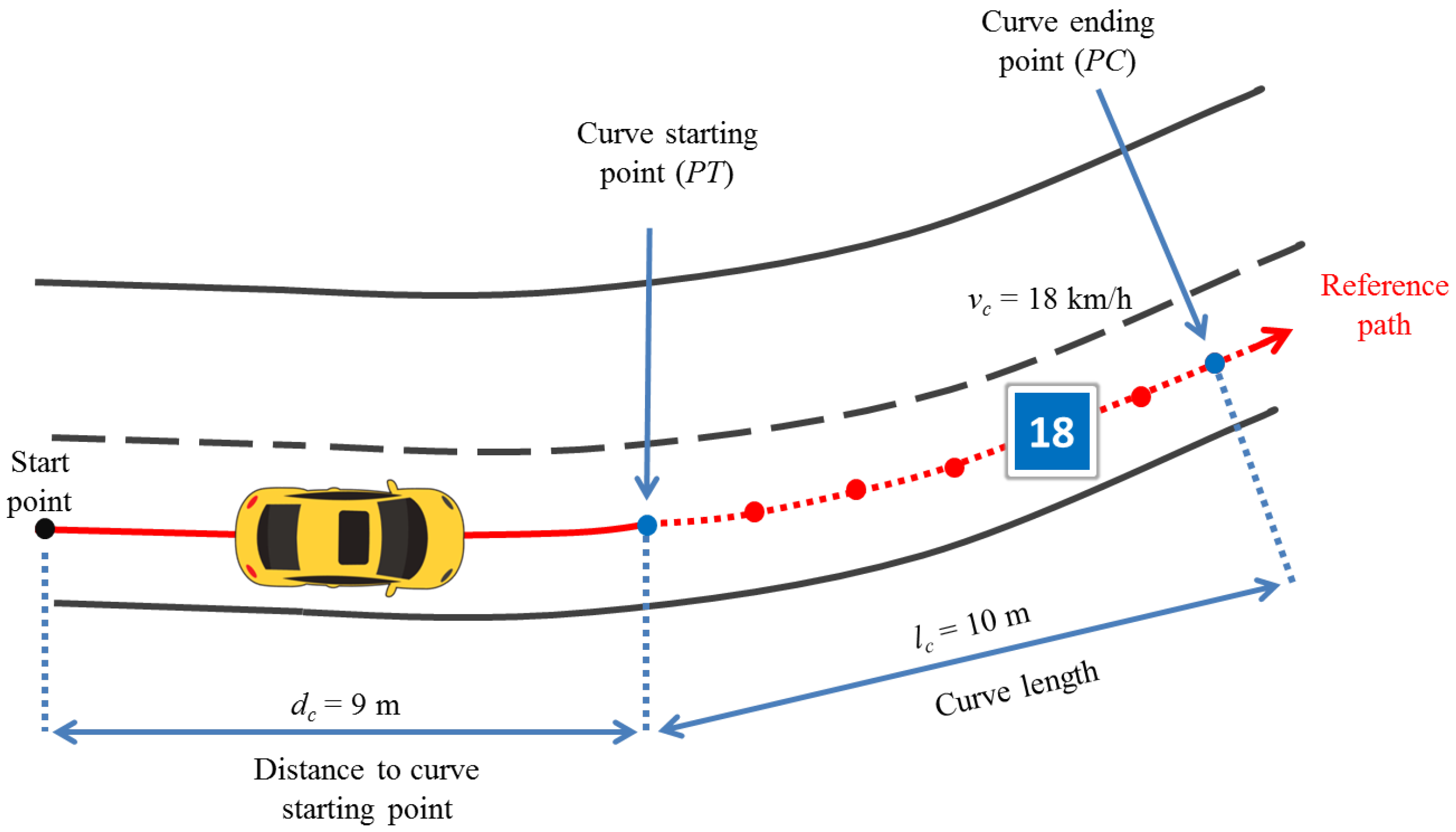
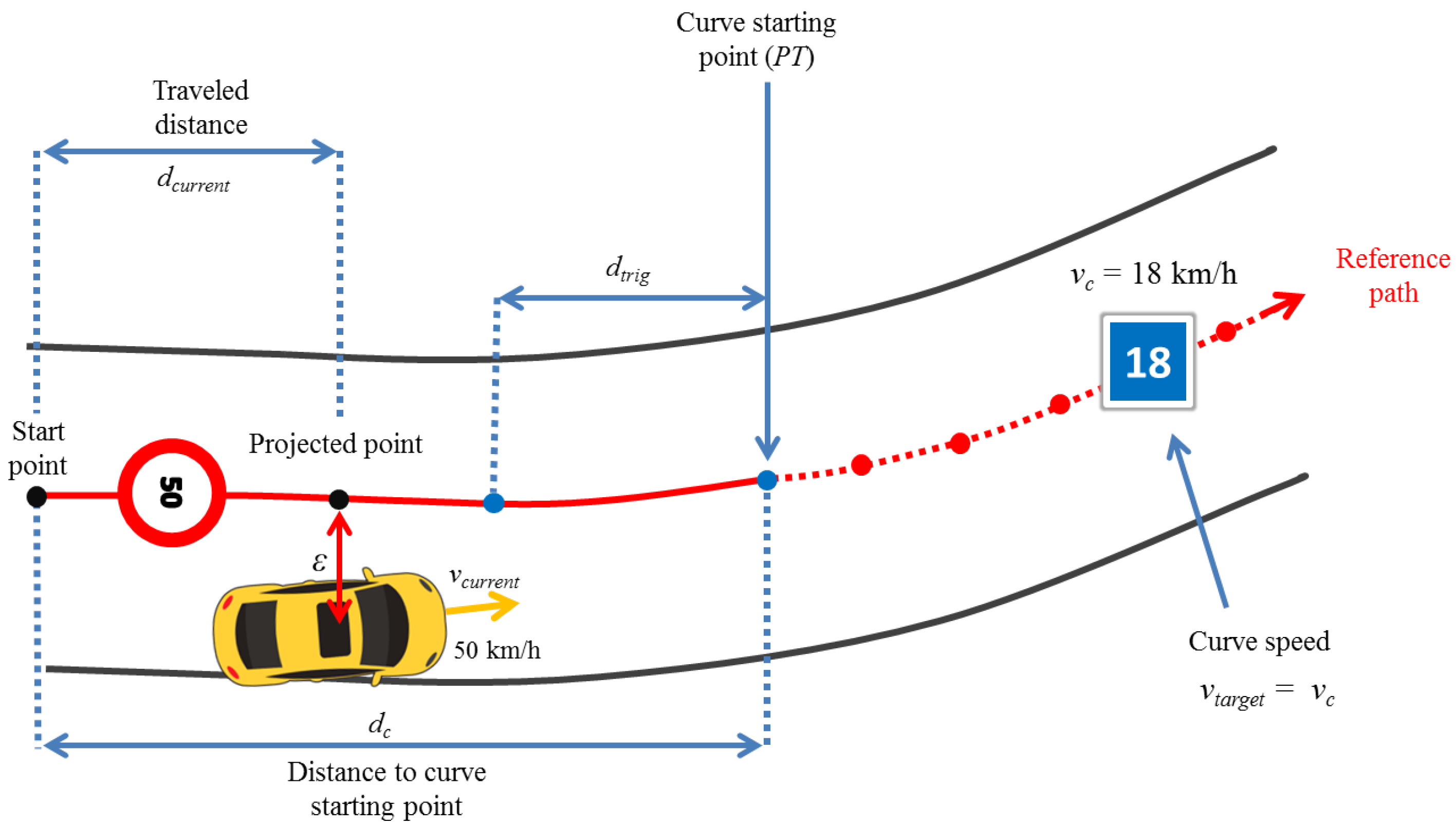
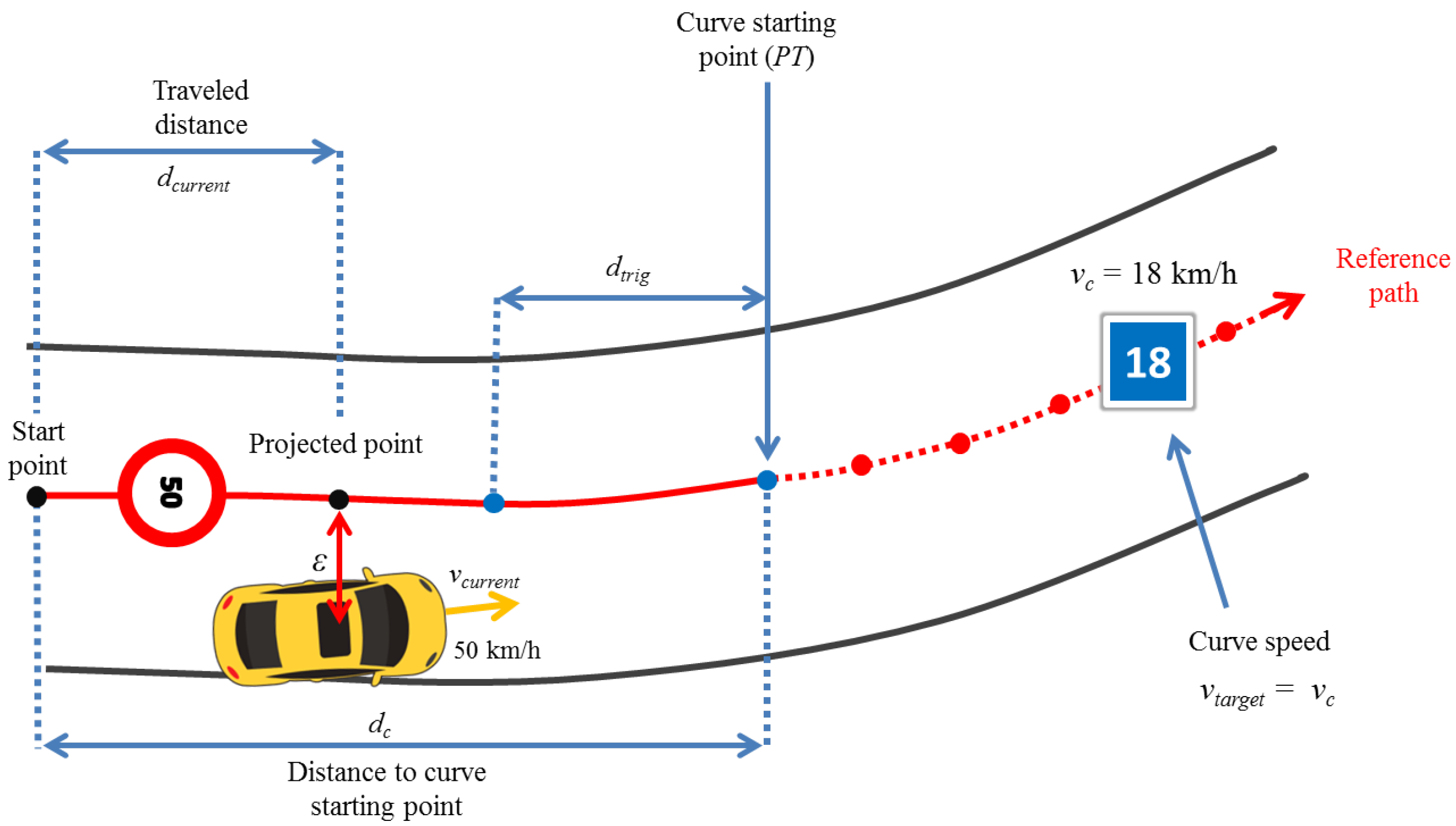
- compute the triggered distance at which the vehicle needs to start decelerating to ensure smooth speed transitions,
- adjust speed during triggered distance to respect sharp curved speed or speed limits,
- control the vehicle’s speed automatically.
2. Literature Overview
2.1. Intelligent Speed Adaptation Systems
2.2. Curve Speed Estimation
3. Steering Control Algorithms for Path Tracking
3.1. Pure Pursuit
3.2. Stanley Method
3.3. Alice Method
3.4. Lombard Method
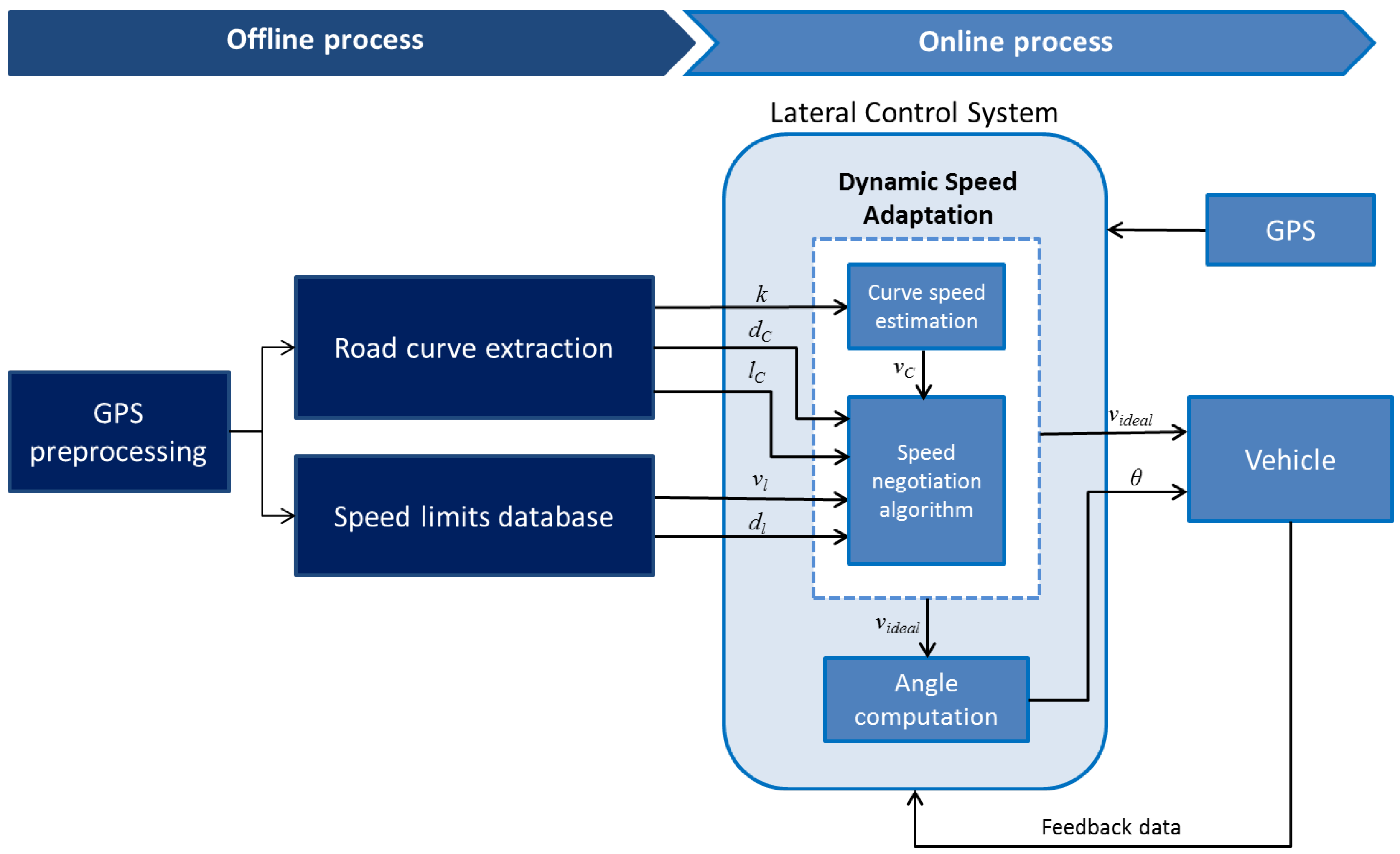
4. Dynamic Speed Adaptation
4.1. GPS Preprocessing
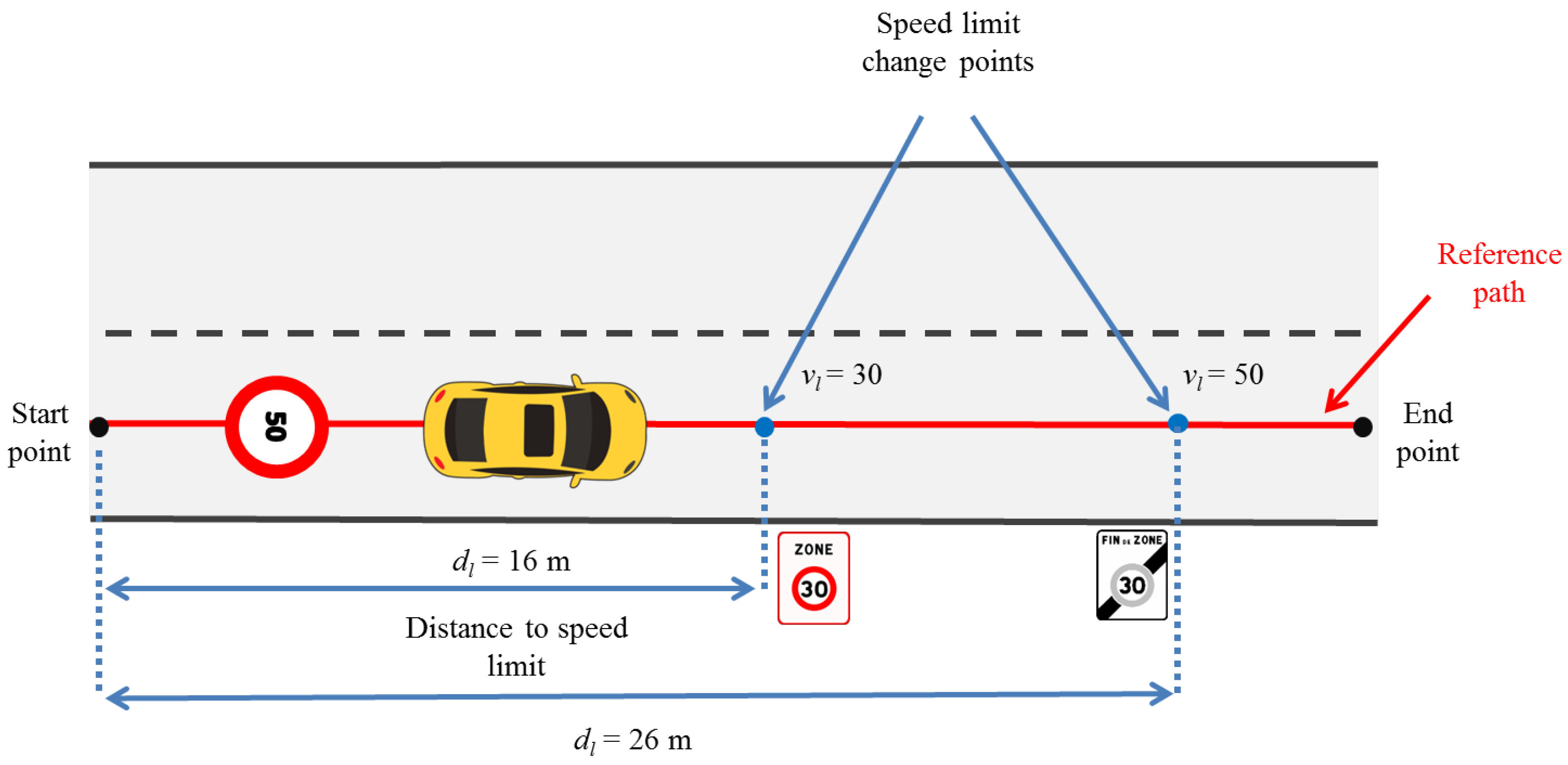
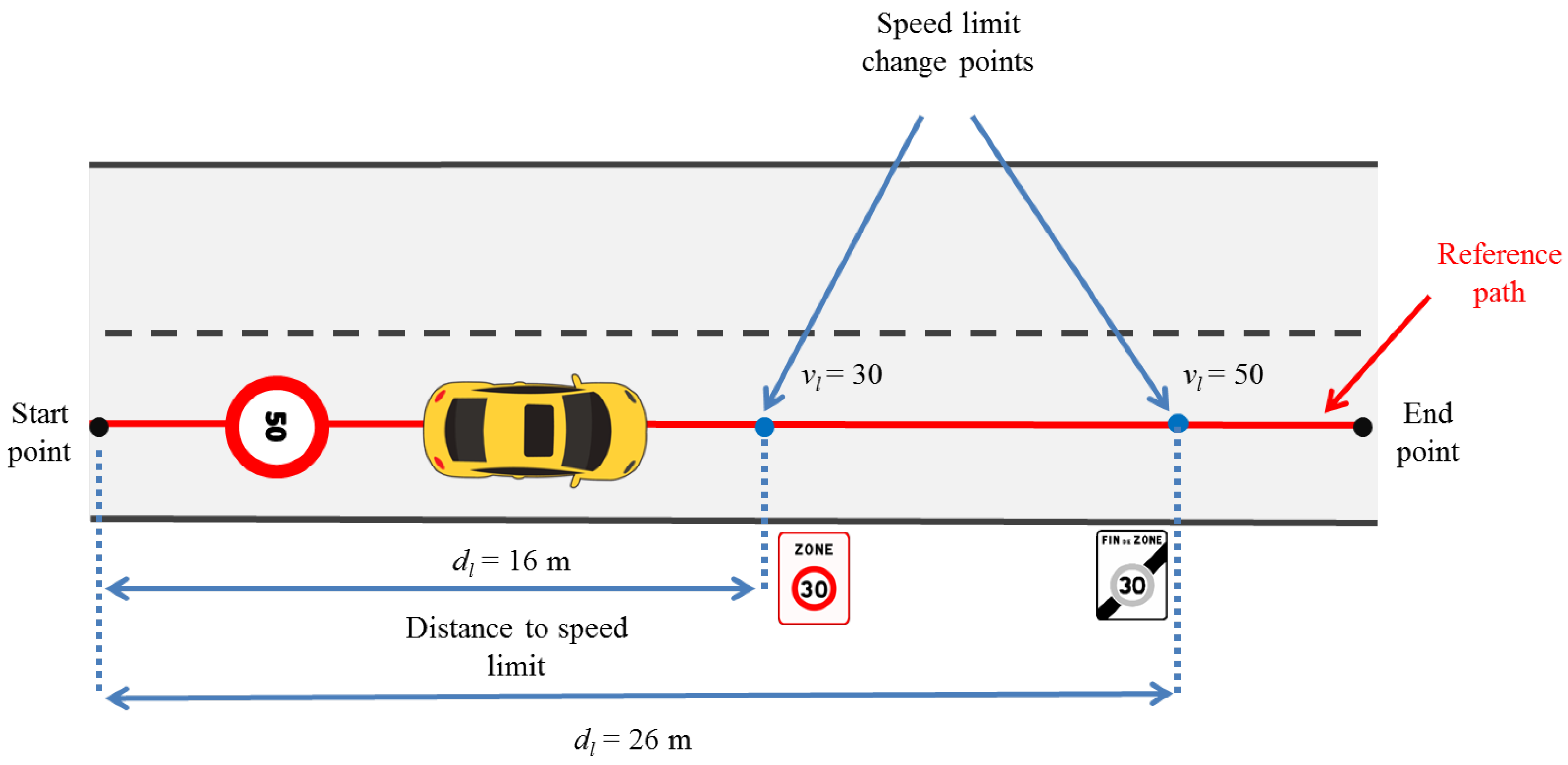
4.2. Speed Limit Database
- Define start and end points.
- Identify positions where speed limits change.
- Compute the distance () from the speed limit change point to the reference starting point in the path.
- Save the distance () for every speed limit change position identified together with its respective speed limit value ().
4.3. Curve Speed Estimation
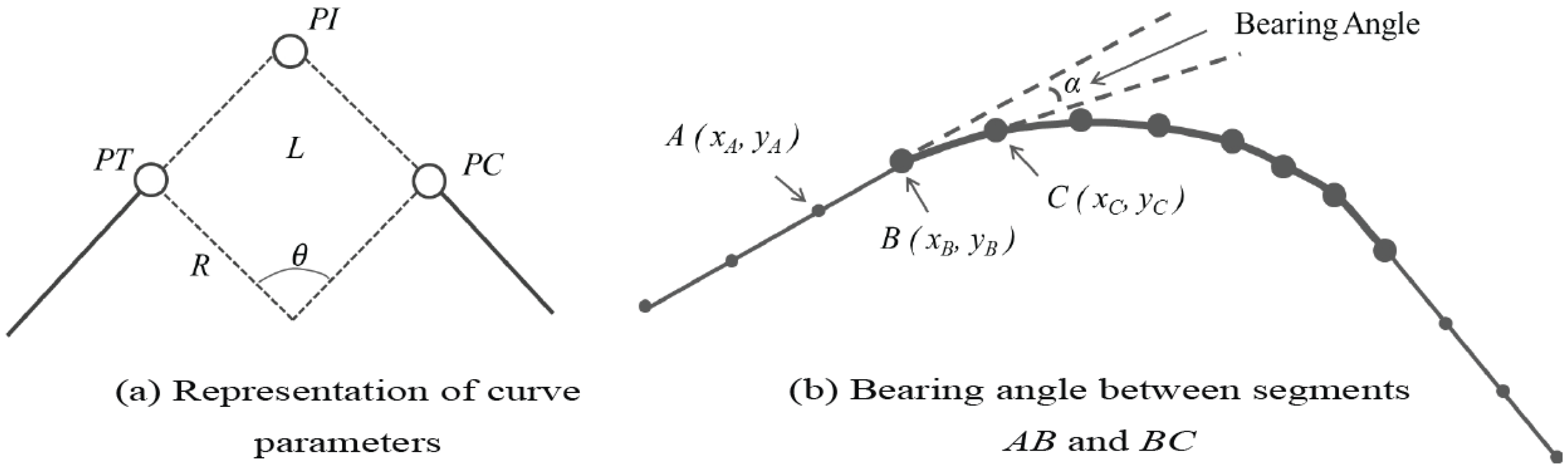
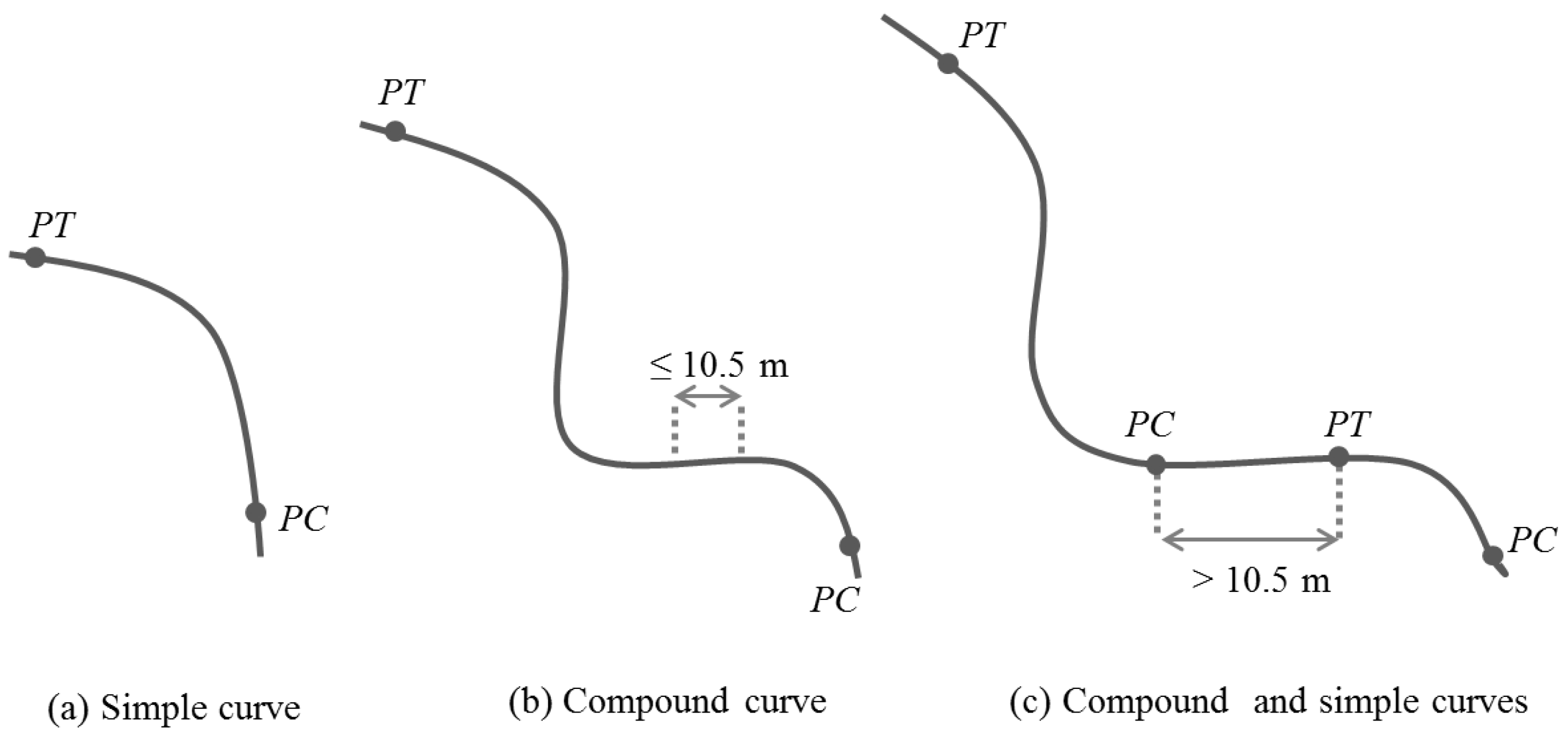
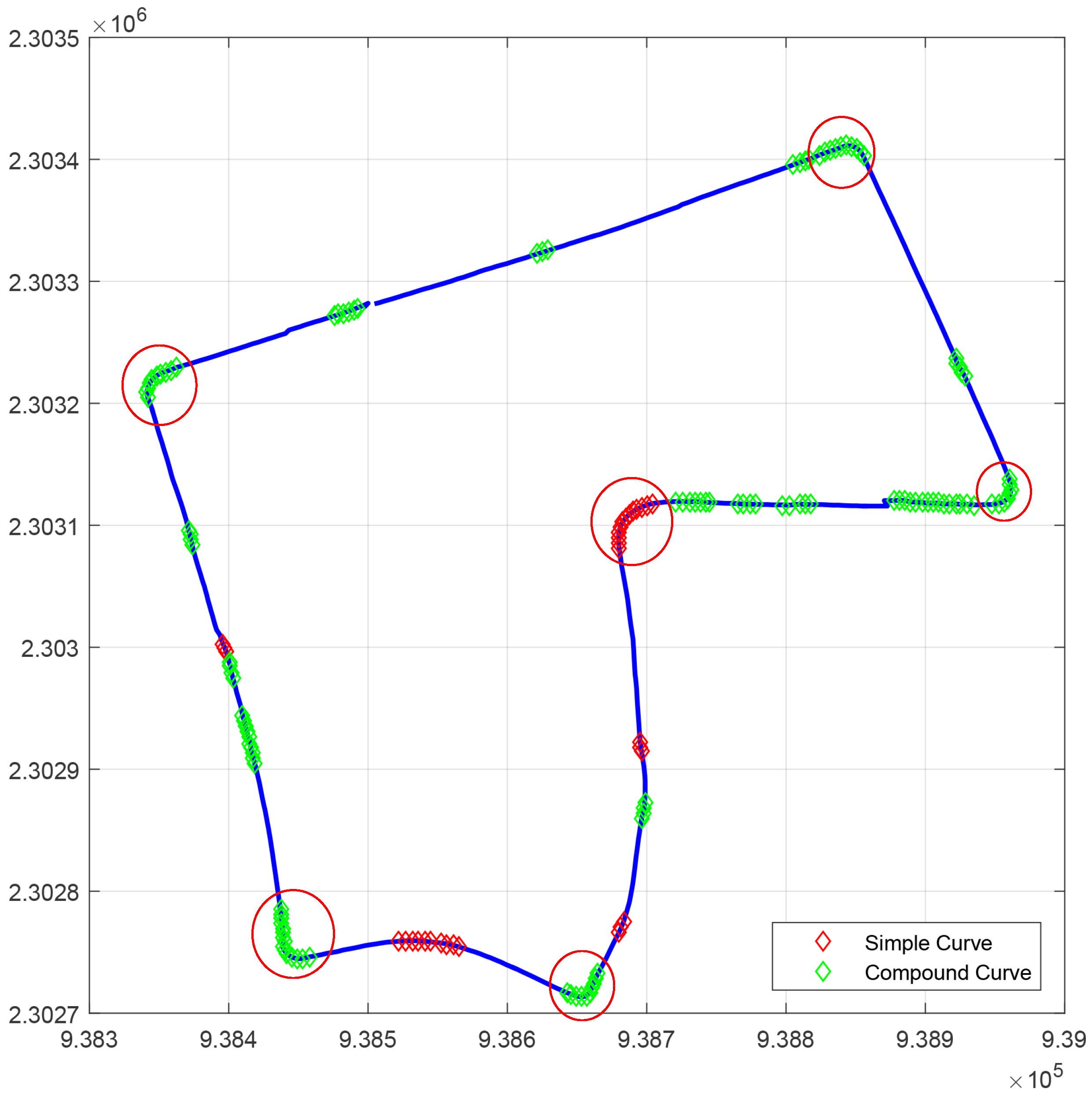
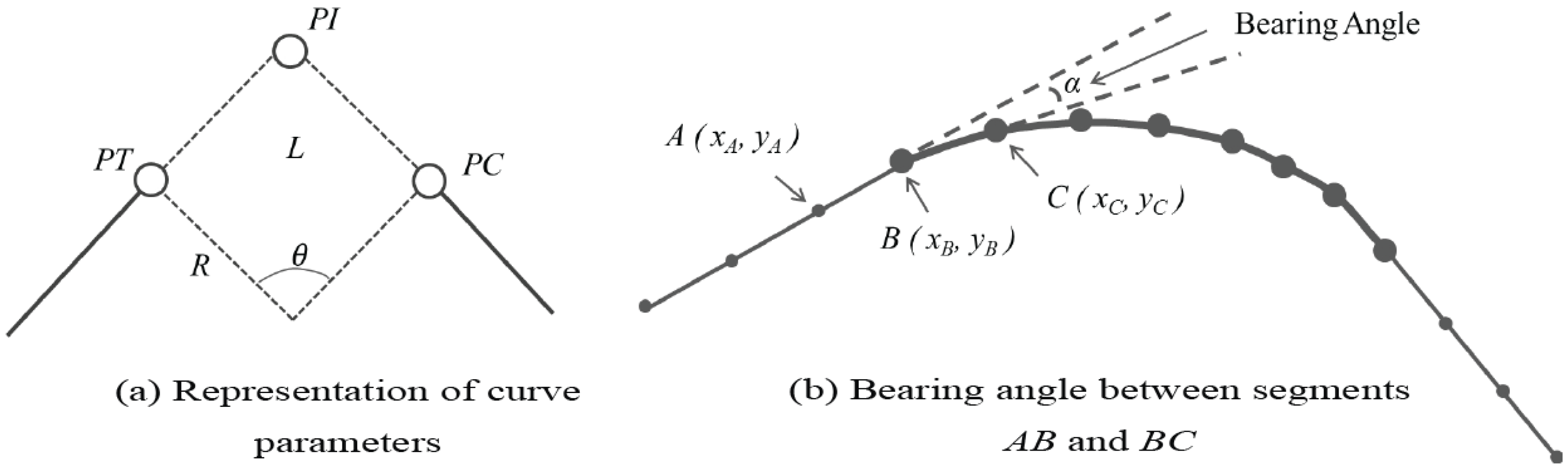
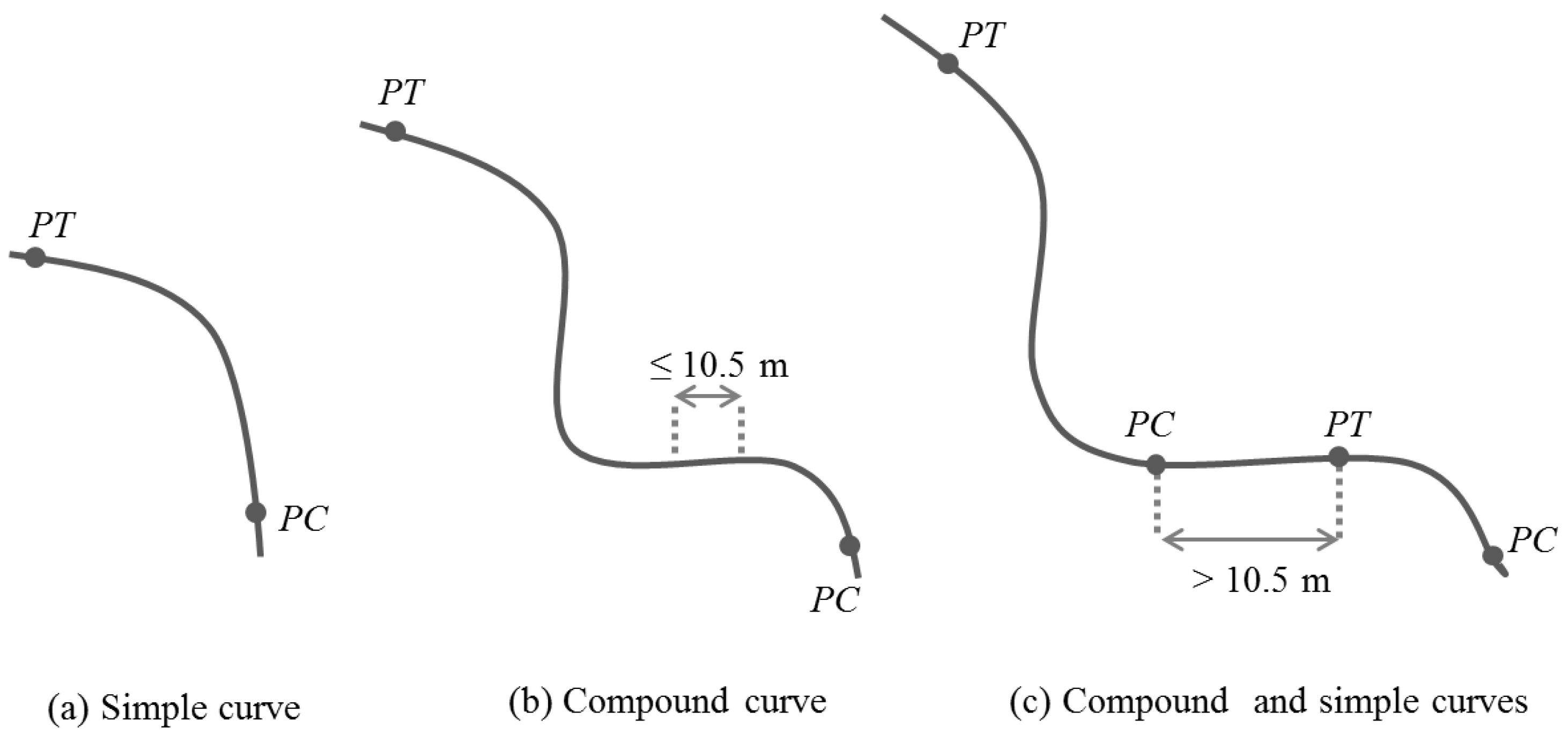
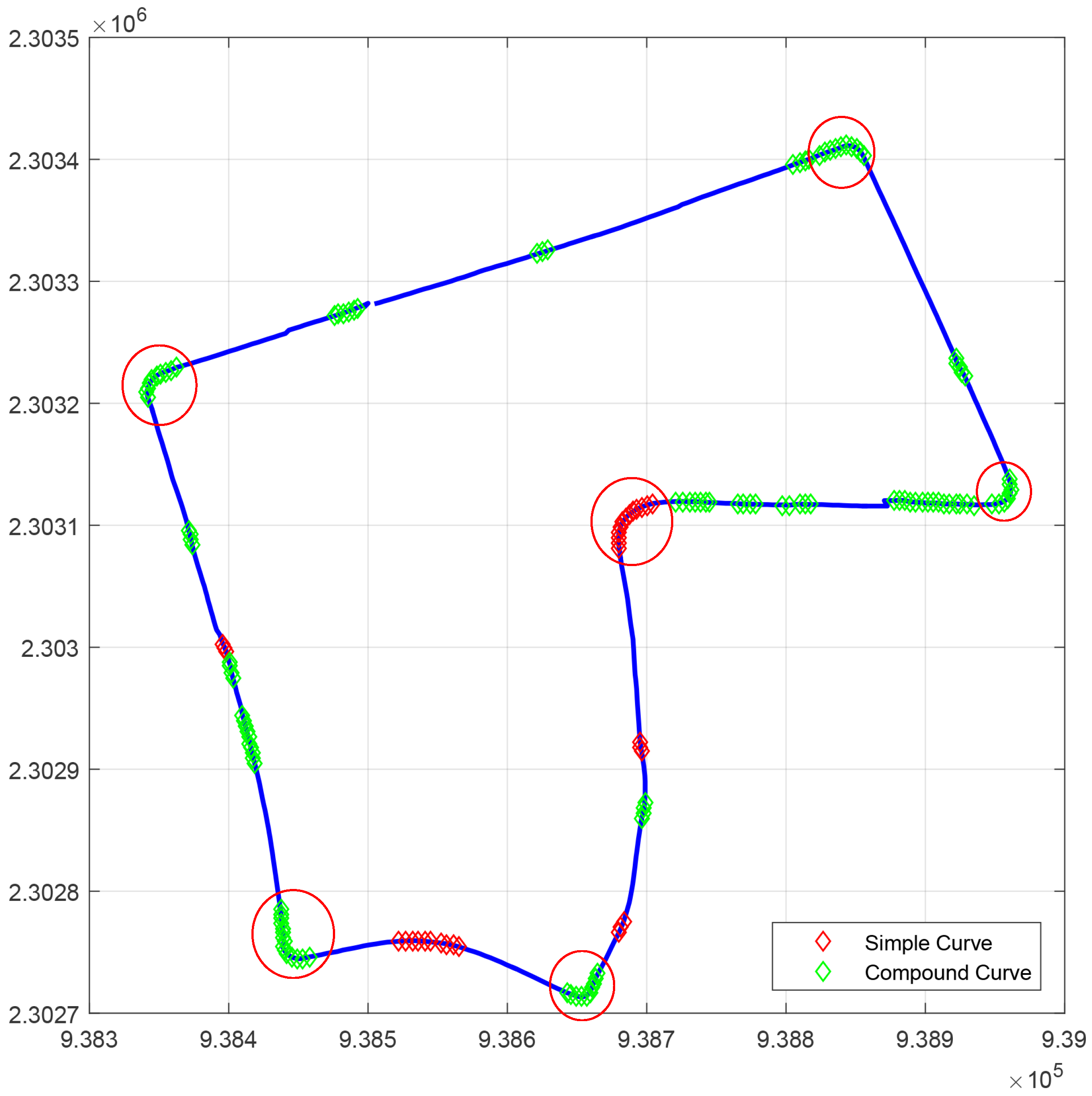
4.3.1. Sharp Curve Estimation
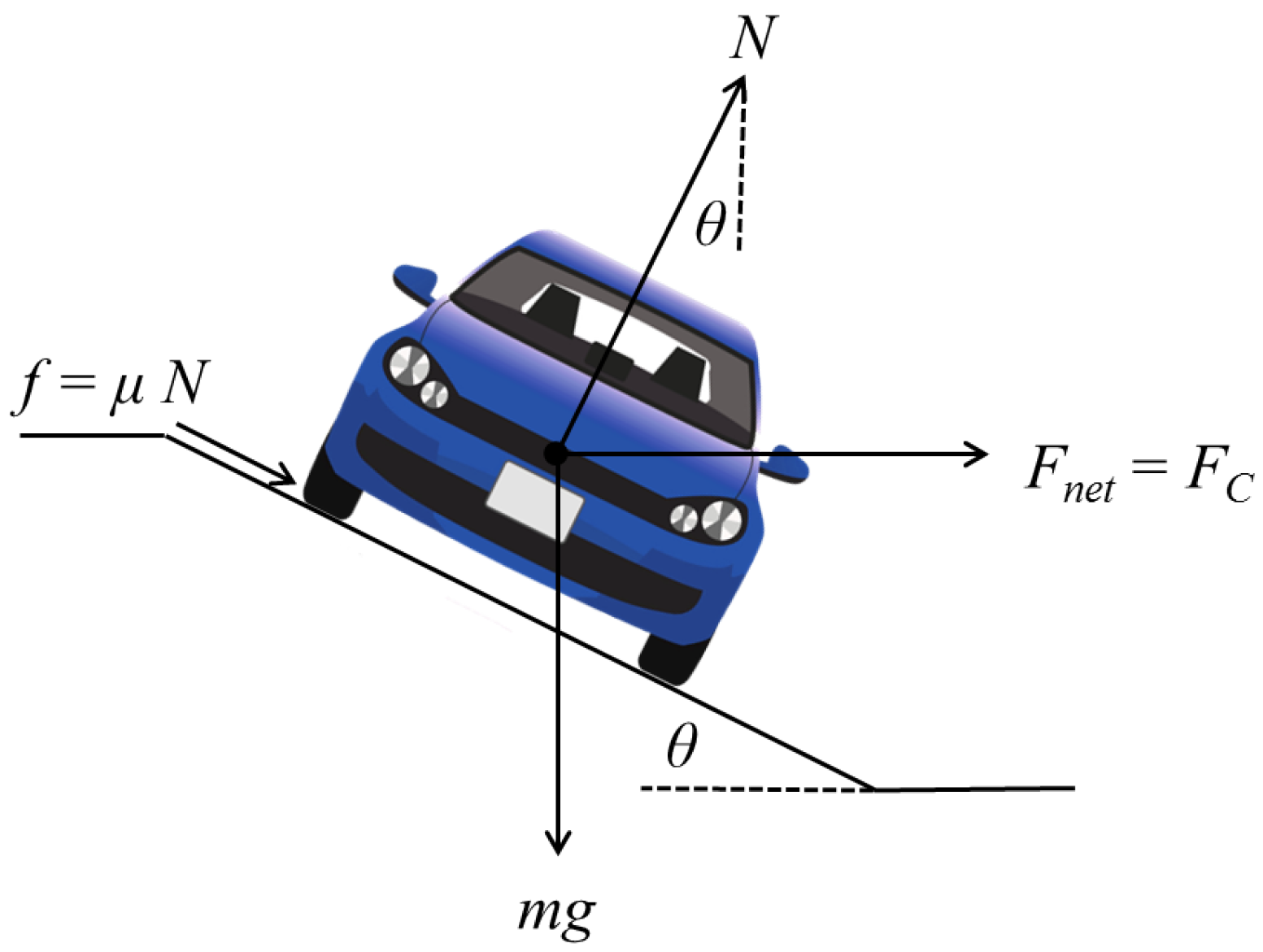
4.3.2. Speed Computation for Sharp Curves.
4.4. Speed Negotiation Algorithm
- is either the speed limit () or curve speed (),
- is the current vehicle’s speed and
- a is the deceleration value to be applied.
| Algorithm 1: Speed negotiation pseudo-algorithm. |
 |
5. Results
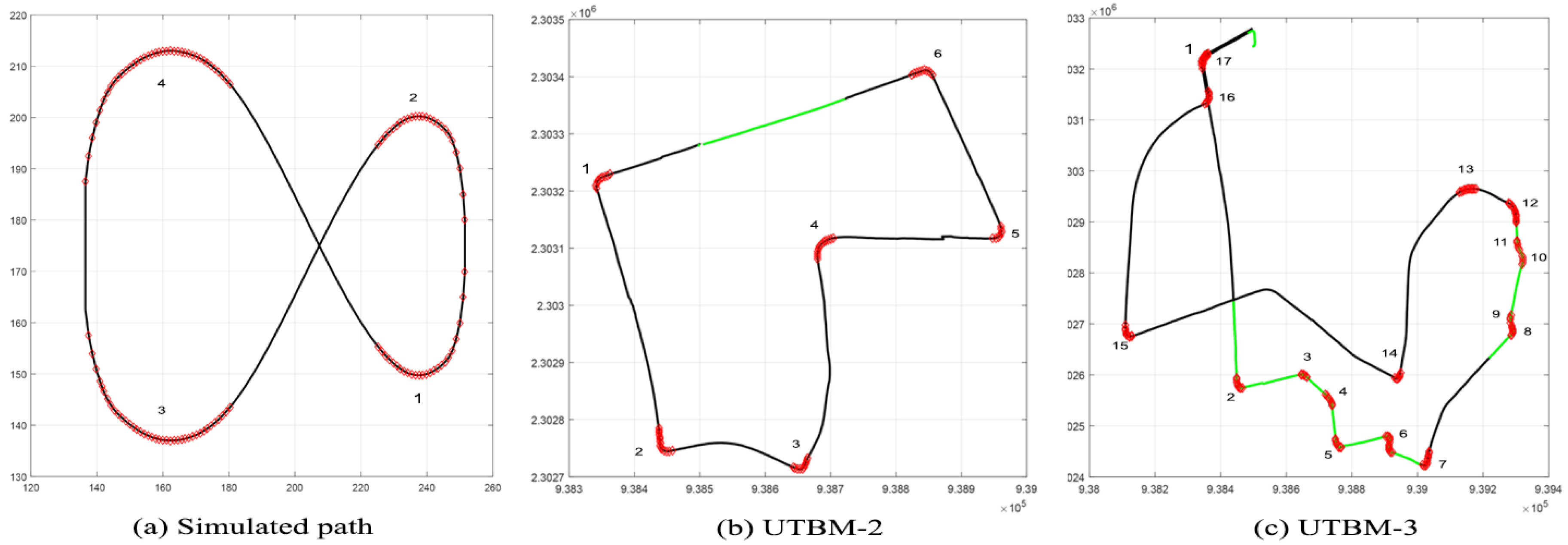
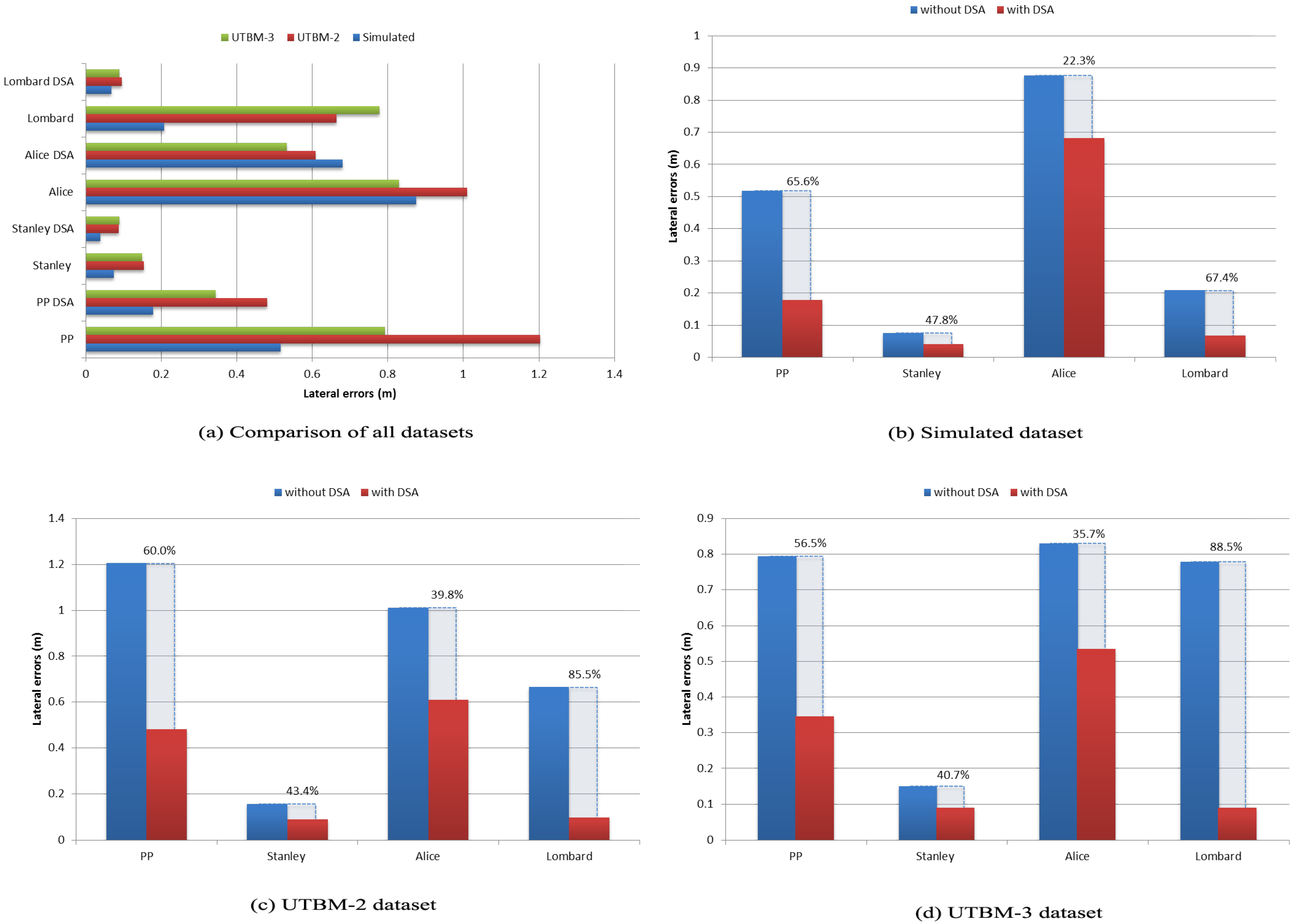
- Simulated path: This path is composed of 210 continuous points in a figure eight shape form. Its total distance is about 374 m with four sharp curves identified. Since it is a virtual path, we set the speed limit for the entire track to 50 km/h, as this is the default speed limit in urban areas in France [24].
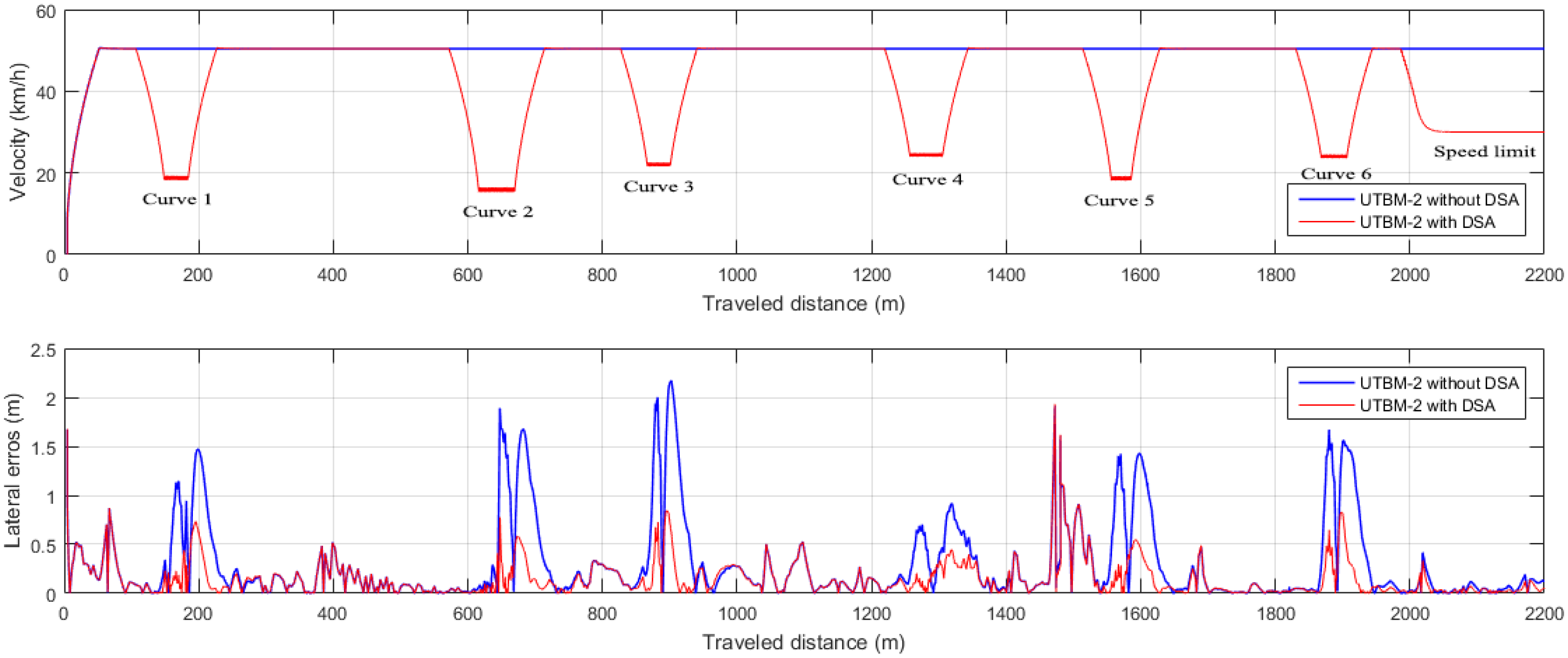
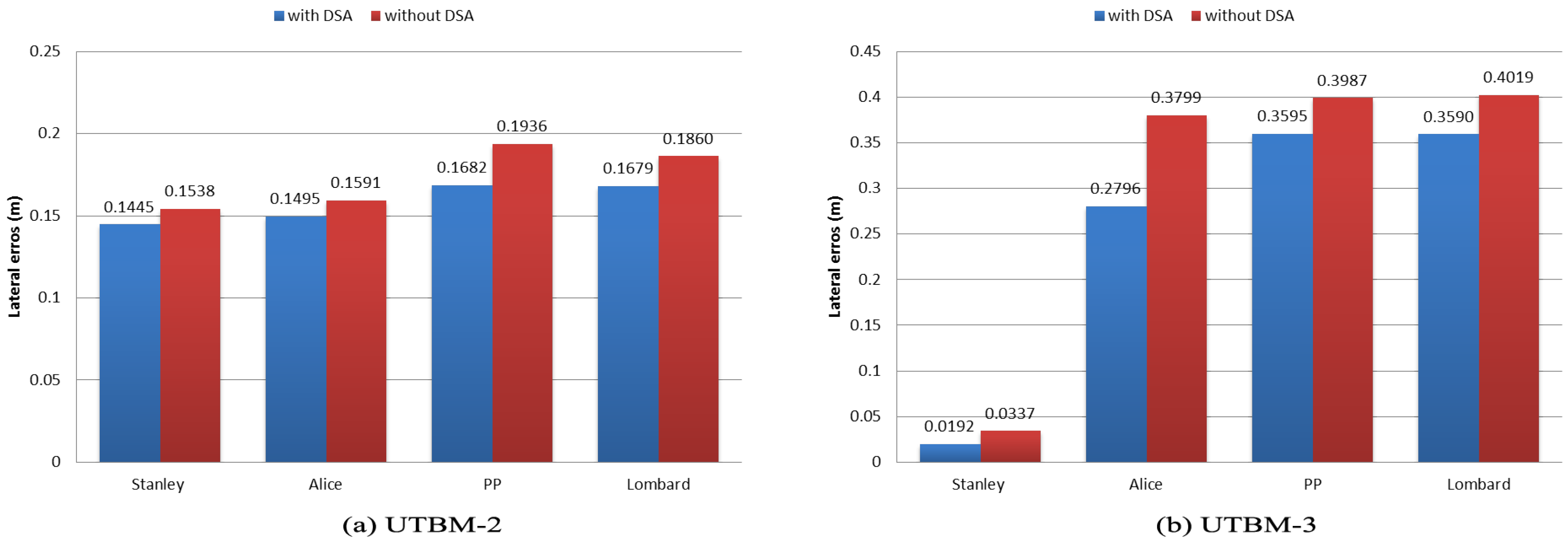
- UTBM-2 dataset: The traveled path contains 541 points after the preprocessing step performed as described in Section 4.1. The distance of this track is about 2.2 km with detected speed limits of 30 km/h in school zones. Six sharp curves were identified with different geometric characteristics.
- UTBM-3 dataset: This path is the longest one with a distance of about 4.5 km. It is represented by 1136 points after the preprocessing step. The number of sharp curves (dangerous curves) detected was 17. The speed limits for this path are 30 km/h in residential areas and 50 km/h otherwise.
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Vehicle Safety, Deliverable 4.8 u of the EC FP7 Project DaCoTA. 2012. Available online: http://www.dacota-project.eu/ (accessed on 14 March 2017).
- Carsten, O.M.; Tate, F. Intelligent speed adaptation: Accident savings and cost–benefit analysis. Accid. Anal. Prev. 2005, 37, 407–416. [Google Scholar] [CrossRef] [PubMed]
- Driscoll, R.; Page, Y.; Lassarre, S.; Ehrlich, J. LAVIA–an evaluation of the potential safety benefits of the French intelligent speed adaptation project. Annu. Proc. Assoc. Adv. Automot. Med. 2007, 51, 485–505. [Google Scholar] [PubMed]
- Vlassenroot, S.; Broekx, S.; De Mol, J.; Panis, L.I.; Brijs, T.; Wets, G. Driving with intelligent speed adaptation: Final results of the Belgian ISA-trial. Trans. Res. Part A Policy Pract. 2007, 41, 267–279. [Google Scholar] [CrossRef]
- Lai, F.; Carsten, O.; Tate, F. How much benefit does Intelligent Speed Adaptation deliver: An analysis of its potential contribution to safety and environment. Accid. Anal. Prev. 2012, 48, 63–72. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Chitturi, M.; Bill, A.; Noyce, D. Automated identification and extraction of horizontal curve information from geographic information system roadway maps. Transp. Res. Rec. J. Transp. Res. Board 2012, 2291, 80–92. [Google Scholar] [CrossRef]
- Hans, Z.; Souleyrette, R.; Bogenreif, C. Horizontal Curve Identification and Evaluation; Technical Report; Iowa State University: Ames, IA, USA, 2012. [Google Scholar]
- Neuman, T.R.; Glennon, J.C.; Saag, J.B. Accident Analyses for Highway Curves; Number 923; National Academy of Sciences: Washington, DC, USA, 1983. [Google Scholar]
- Glaser, S.; Nouveliere, L.; Lusetti, B. Speed limitation based on an advanced curve warning system. Pronceedings of the 2007 IEEE Intelligent Vehicles Symposium, Istanbul, Turkey, 13–15 June 2007; pp. 686–691. [Google Scholar]
- Lee, J.W.; Prabhuswamy, S. A Unified Framework of Adaptive Cruise Control for Speed Limit Follower and Curve Speed Control Function; Technical Report; SAE Technical Paper: Detroit, MI, USA, 2013. [Google Scholar]
- Park, M.; Lee, S.; Han, W. Development of steering control system for autonomous vehicle using geometry-based path tracking algorithm. ETRI J. 2015, 37, 617–625. [Google Scholar] [CrossRef]
- Thrun, S.; Montemerlo, M.; Dahlkamp, H.; Stavens, D.; Aron, A.; Diebel, J.; Fong, P.; Gale, J.; Halpenny, M.; Hoffmann, G.; et al. Stanley: The robot that won the DARPA Grand Challenge. J. Field Robot. 2006, 23, 661–692. [Google Scholar] [CrossRef]
- Alonso, I.P.; Llorca, D.F.; Gavilán, M.; Pardo, S.Á.; García-Garrido, M.Á.; Vlacic, L.; Sotelo, M.Á. Accurate global localization using visual odometry and digital maps on urban environments. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1535–1545. [Google Scholar] [CrossRef]
- Gruyer, D.; Belaroussi, R.; Revilloud, M. Map-aided localization with lateral perception. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium, Ypsilanti, MI, USA, 8–11 June 2014; pp. 674–680. [Google Scholar]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; University of North Carolina at Chapel Hill: Chapel Hill, NC, USA, 1995. [Google Scholar]
- Wang, S.; Deng, Z.; Yin, G. An Accurate GPS-IMU/DR Data Fusion Method for Driverless Car Based on a Set of Predictive Models and Grid Constraints. Sensors 2016, 16, 280. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Hu, Z.; Uchimura, K. Precise curvature estimation by cooperating with digital road map. In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 859–864. [Google Scholar]
- Varhelyi, A. Dynamic speed adaptation in adverse conditions: A system proposal. IATSS Res. 2002, 26, 52–59. [Google Scholar] [CrossRef]
- Agerholm, N.; Waagepetersen, R.; Tradisauskas, N.; Harms, L.; Lahrmann, H. Preliminary results from the Danish intelligent speed adaptation project pay as you speed. IET Intell. Transp. Syst. 2008, 2, 143–153. [Google Scholar] [CrossRef]
- Tradišauskas, N.; Juhl, J.; Lahrmann, H.; Jensen, C.S. Map matching for intelligent speed adaptation. IET Intell. Transp. Syst. 2009, 3, 57–66. [Google Scholar] [CrossRef]
- Young, K.L.; Regan, M.A.; Triggs, T.J.; Jontof-Hutter, K.; Newstead, S. Intelligent speed adaptation—Effects and acceptance by young inexperienced drivers. Accid. Anal. Prev. 2010, 42, 935–943. [Google Scholar] [CrossRef] [PubMed]
- Walker, G.H.; Stanton, N.A.; Young, M.S. The ironies of vehicle feedback in car design. Ergonomics 2006, 49, 161–179. [Google Scholar] [CrossRef] [PubMed]
- Spichkova, M.; Simic, M.; Schmidt, H.; Cheng, J.; Dong, X.; Gui, Y.; Liang, Y.; Ling, P.; Yin, Z. Formal models for intelligent speed validation and adaptation. Procedia Comput. Sci. 2016, 96, 1609–1618. [Google Scholar] [CrossRef]
- French Government, Code de la Route. Article R413-1, R413-2, R413-3, R413-4. 2001. Available online: https://www.legifrance.gouv.fr (accessed on 04 April 2017).
- Cleret, J.; Chauvin, P.; Bernard, G.; Dupre, G.; Floris, O. Méthode de sélection des virages à signaler et niveau de signalisation à implanter. In Guide Pratique, Conseil Général de la Seine-Maritime; DocPlayer.fr: Normandie, France, 2001. (In French) [Google Scholar]
- Lehtonen, E.; Lappi, O.; Koirikivi, I.; Summala, H. Effect of driving experience on anticipatory look-ahead fixations in real curve driving. Accid. Anal. Prev. 2014, 70, 195–208. [Google Scholar] [CrossRef] [PubMed]
- Zhang, D.; Xiao, Q.; Wang, J.; Li, K. Driver curve speed model and its application to ACC speed control in curved roads. Int. J. Automot. Technol. 2013, 14, 241–247. [Google Scholar] [CrossRef]
- Eidehall, A.; Pohl, J.; Gustafsson, F. Joint road geometry estimation and vehicle tracking. Control Eng. Pract. 2007, 15, 1484–1494. [Google Scholar] [CrossRef]
- Lundquist, C.; Schon, T.B. Road geometry estimation and vehicle tracking using a single track model. In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 144–149. [Google Scholar]
- Lundquist, C.; Schön, T.B. Joint ego-motion and road geometry estimation. Inf. Fusion 2011, 12, 253–263. [Google Scholar] [CrossRef]
- Gámez Serna, C.; Lombard, A.; Ruichek, Y.; Abbas-Turki, A. Gps-Based Curve Estimation for an Adaptive Pure Pursuit Algorithm. In Proceedings of the Mexican International Conference on Artificial Intelligence, Cancún, Mexico, 23–29 October 2016; Springer: Berlin, Germany, 2016. [Google Scholar]
- Bonneson, J.; Pratt, M.; Miles, J. Evaluation of Alternative Procedures for Setting Curve Advisory Speed. Transp. Res. Record J. Transp. Res. Board 2009, 2122, 9–16. [Google Scholar] [CrossRef]
- Chowdhury, M.A.; Warren, D.L.; Bissell, H.; Taori, S. Are the criteria for setting advisory speeds on curves still relevant? Inst. Transp. Eng. ITE J. 1998, 68, 32. [Google Scholar]
- Huth, V.; Biral, F.; Martín, Ó.; Lot, R. Comparison of two warning concepts of an intelligent Curve Warning system for motorcyclists in a simulator study. Accid. Anal. Prev. 2012, 44, 118–125. [Google Scholar] [CrossRef] [PubMed]
- Snider, J.M. Automatic Steering Methods for Autonomous Automobile Path Tracking; Technical Report CMU-RITR-09-08; Robotics Institute Carnegie Mellon University: Pittsburgh, PA, USA, 2009. [Google Scholar]
- Linderoth, M.; Soltesz, K.; Murray, R.M. Nonlinear lateral control strategy for nonholonomic vehicles. In Proceedings of the 2008 American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 3219–3224. [Google Scholar]
- Lombard, A.; Hao, X.; Abbas-Turki, A.; El Moudni, A.; Galland, S.; Yasar, A.-U.-H. Lateral Control of an Unmaned Car Using GNSS Positionning in the Context of Connected Vehicles. Procedia Comput. Sci. 2016, 98, 148–155. [Google Scholar] [CrossRef]
- Szepe, T.; Assal, S.F. Pure Pursuit Trajectory Tracking Approach: Comparison and Experimental Validation. Int. J. Robot. Autom. 2012, 27, 355. [Google Scholar] [CrossRef]
- Liu, R.; Duan, J. A path tracking algorithm of intelligent vehicle by preview strategy. In Proceedings of the 2013 32nd Chinese Control Conference (CCC), Xi’an, China, 26–28 July 2013; pp. 5630–5635. [Google Scholar]
- Takasu, T.; Yasuda, A. Evaluation of RTK-GPS performance with low-cost single-frequency GPS receivers. In Proceedings of the 2008 International Symposium on GPS/GNSS, Tokyo, Japan, 11–14 November 2008; pp. 852–861. [Google Scholar]
- Haklay, M.; Weber, P. OpenStreetMap: User-generated street maps. IEEE Pervasive Comput. 2008, 7, 12–18. [Google Scholar] [CrossRef]
- Kannan, S.; Thangavelu, A.; Kalivaradhan, R. An intelligent driver assistance system (i-das) for vehicle safety modelling using ontology approach. Int. J. Ubicomp 2010, 1, 15–29. [Google Scholar] [CrossRef]
- AASHTO (American Association of State Highway and Transportation Officials). A Policy on Geometric Design of Highways and Streets, 5th ed.; American Association of State Highway and Transportation Officials: Washington, DC, USA, 2004. [Google Scholar]
- Maurya, A.K.; Bokare, P.S. Study of deceleration behaviour of different vehicle types. Int. J. Traffic Transp. Eng. 2012, 2, 253–270. [Google Scholar] [CrossRef]
- Qiao, Y.; Cappelle, C.; Ruichek, Y. Place recognition based visual localization using LBP feature and SVM. In Proceedings of the 14th Mexican International Conference on Artificial Intelligence, Cuernavaca, Mexico, 25–31 October 2015; Springer: Berlin, Germany, 2015; pp. 393–404. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Stanley | Stanley DSA | Alice | Alice DSA | PP | PP DSA | Lombard | Lombard DSA |
|---|---|---|---|---|---|---|---|---|
| UTBM-2 | 0.0182 | 0.0158 | 0.0452 | 0.0416 | 0.1005 | 0.0554 | 0.0845 | 0.0550 |
| UTBM-3 | 0.0210 | 0.0112 | 0.2840 | 0.1934 | 0.3346 | 0.2823 | 0.3374 | 0.2817 |
| Average | 0.0196 | 0.0135 | 0.1646 | 0.1175 | 0.2175 | 0.1688 | 0.2109 | 0.1683 |
| Curve | Stanley | Stanley DSA | Alice | Alice DSA | PP | PP DSA | Lombard | Lombard DSA |
|---|---|---|---|---|---|---|---|---|
| 1 | 0.0599 | 0.0388 | 0.7637 | 0.6249 | 0.1935 | 0.2257 | 0.1854 | 0.0613 |
| 2 | 0.0762 | 0.0302 | 0.8286 | 0.6128 | 0.7972 | 0.0603 | 0.1752 | 0.04807 |
| 3 | 0.1029 | 0.0508 | 1.2195 | 0.9323 | 0.4351 | 0.2239 | 0.2223 | 0.09659 |
| 4 | 0.0493 | 0.0315 | 0.5757 | 0.4726 | 0.2107 | 0.1204 | 0.1531 | 0.04335 |
| Average | 0.0721 | 0.0378 | 0.8469 | 0.6607 | 0.4091 | 0.1576 | 0.1840 | 0.06233 |
| Curve | Stanley | Stanley DSA | Alice | Alice DSA | PP | PP DSA | Lombard | Lombard DSA |
|---|---|---|---|---|---|---|---|---|
| 1 | 0.0722 | 0.0288 | 0.5747 | 0.3308 | 0.8657 | 0.2451 | 0.4231 | 0.0552 |
| 2 | 0.0743 | 0.0245 | 0.6572 | 0.4945 | 0.7135 | 0.2372 | 0.5050 | 0.0589 |
| 3 | 0.2586 | 0.1797 | 1.2132 | 0.7815 | 1.5847 | 0.6940 | 0.9028 | 0.1292 |
| 4 | 0.0574 | 0.0265 | 0.5724 | 0.2591 | 0.5528 | 0.2396 | 0.2616 | 0.0382 |
| 5 | 0.1214 | 0.0449 | 1.0485 | 0.5650 | 1.0909 | 0.3627 | 0.5347 | 0.0751 |
| 6 | 0.1001 | 0.0441 | 0.9109 | 0.4528 | 1.4346 | 0.7075 | 0.7563 | 0.0687 |
| Average | 0.114 | 0.0581 | 0.8295 | 0.4807 | 1.0404 | 0.4143 | 0.5639 | 0.0709 |
| Curve | Stanley | Stanley DSA | Alice | Alice DSA | PP | PP DSA | Lombard | Lombard DSA |
|---|---|---|---|---|---|---|---|---|
| 1 | 0.0763 | 0.0328 | 0.6984 | 0.3589 | 0.5012 | 0.2007 | 0.4840 | 0.0574 |
| 2 | 0.0910 | 0.0311 | 0.7711 | 0.4342 | 0.5934 | 0.1141 | 0.5959 | 0.0530 |
| 3 | 0.0545 | 0.0258 | 0.3409 | 0.2619 | 0.4462 | 0.1409 | 0.4498 | 0.0337 |
| 4 | 0.0421 | 0.0196 | 0.3409 | 0.1912 | 0.4056 | 0.0975 | 0.3857 | 0.0218 |
| 5 | 0.0893 | 0.0296 | 0.7401 | 0.4422 | 0.6162 | 0.0948 | 0.6225 | 0.0519 |
| 6 | 0.4570 | 0.4209 | 1.4465 | 1.0717 | 1.3936 | 1.3865 | 1.4099 | 0.2663 |
| 7 | 0.1697 | 0.1054 | 1.0596 | 0.6294 | 0.8554 | 0.565 | 0.8769 | 0.0835 |
| 8 | 0.1781 | 0.0705 | 1.1031 | 0.7269 | 0.9603 | 0.3007 | 0.9640 | 0.0818 |
| 9 | 0.0718 | 0.0297 | 0.3765 | 0.3331 | 1.1918 | 0.3802 | 1.2084 | 0.0523 |
| 10 | 0.0753 | 0.0278 | 0.5634 | 0.3694 | 1.0366 | 0.1566 | 1.0426 | 0.0488 |
| 11 | 0.0344 | 0.0183 | 0.2441 | 0.1671 | 0.5754 | 0.4024 | 0.5825 | 0.0240 |
| 12 | 0.0472 | 0.0247 | 0.4376 | 0.2123 | 0.2039 | 0.1248 | 0.2053 | 0.0306 |
| 13 | 0.0209 | 0.0193 | 0.2167 | 0.0885 | 0.1104 | 0.1312 | 0.1101 | 0.0145 |
| 14 | 0.1573 | 0.0669 | 0.9394 | 0.6268 | 0.9873 | 0.1431 | 0.9973 | 0.0613 |
| 15 | 0.1027 | 0.0389 | 0.9034 | 0.4698 | 0.5558 | 0.2250 | 0.5589 | 0.0651 |
| 16 | 0.1171 | 0.0424 | 0.7964 | 0.4465 | 0.9738 | 0.3490 | 0.8710 | 0.0706 |
| 17 | 0.1505 | 0.0615 | 0.5531 | 0.6594 | 0.934 | 0.2574 | 0.8212 | 0.0813 |
| Average | 0.1138 | 0.0627 | 0.6783 | 0.4405 | 0.7259 | 0.2982 | 0.7168 | 0.0646 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gámez Serna, C.; Ruichek, Y. Dynamic Speed Adaptation for Path Tracking Based on Curvature Information and Speed Limits. Sensors 2017, 17, 1383. https://doi.org/10.3390/s17061383
Gámez Serna C, Ruichek Y. Dynamic Speed Adaptation for Path Tracking Based on Curvature Information and Speed Limits. Sensors. 2017; 17(6):1383. https://doi.org/10.3390/s17061383
Chicago/Turabian StyleGámez Serna, Citlalli, and Yassine Ruichek. 2017. "Dynamic Speed Adaptation for Path Tracking Based on Curvature Information and Speed Limits" Sensors 17, no. 6: 1383. https://doi.org/10.3390/s17061383
APA StyleGámez Serna, C., & Ruichek, Y. (2017). Dynamic Speed Adaptation for Path Tracking Based on Curvature Information and Speed Limits. Sensors, 17(6), 1383. https://doi.org/10.3390/s17061383