
Diagnosis of Compound Fault Using Sparsity Promoted-Based Sparse Component Analysis


Abstract
:1. Introduction
2. Basic Theory
2.1. Sparse Component Analysis
- (1)
- Extract any column vector from the estimated mixed matrix to compose the dimensional matrix termed and get the matrix;
- (2)
- Calculate the inverse matrix of each matrix, ;
- (3)
- Decompose the observed signal vector according to the direction of the base vector, which is every column vector in the matrix, and the length of each vector is obtained. For any time t, the observed signal is formed by a linear combination of the sparse source signals, so that the source signal is decided by the next Equation:
2.2. Wavelet Modulus Maxima
- (1)
- Wavelet basis function is used to conduct n level wavelet transform to get the high-frequency wavelet coefficients at each level and obtain the wavelet modulus maxima.
- (2)
- For each level, search for their communication points and a neighborhood on the previous level.
- (3)
- Keep the maxima points in the neighborhood of the communication points while removing the modulus maxima from the neighborhood.
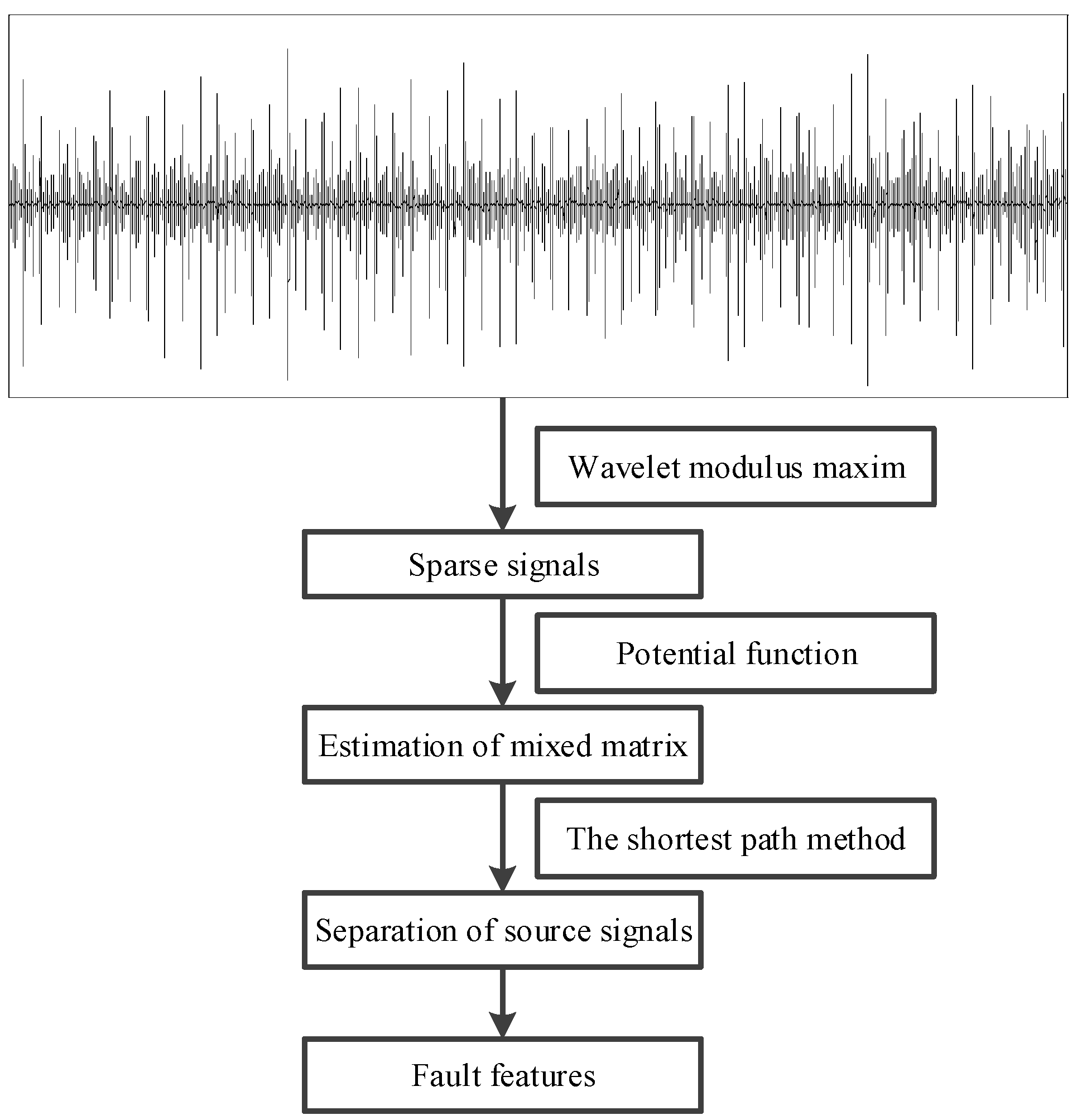
3. Separation Method by Sparsity Promoted-Based SCA
4. Application Cases
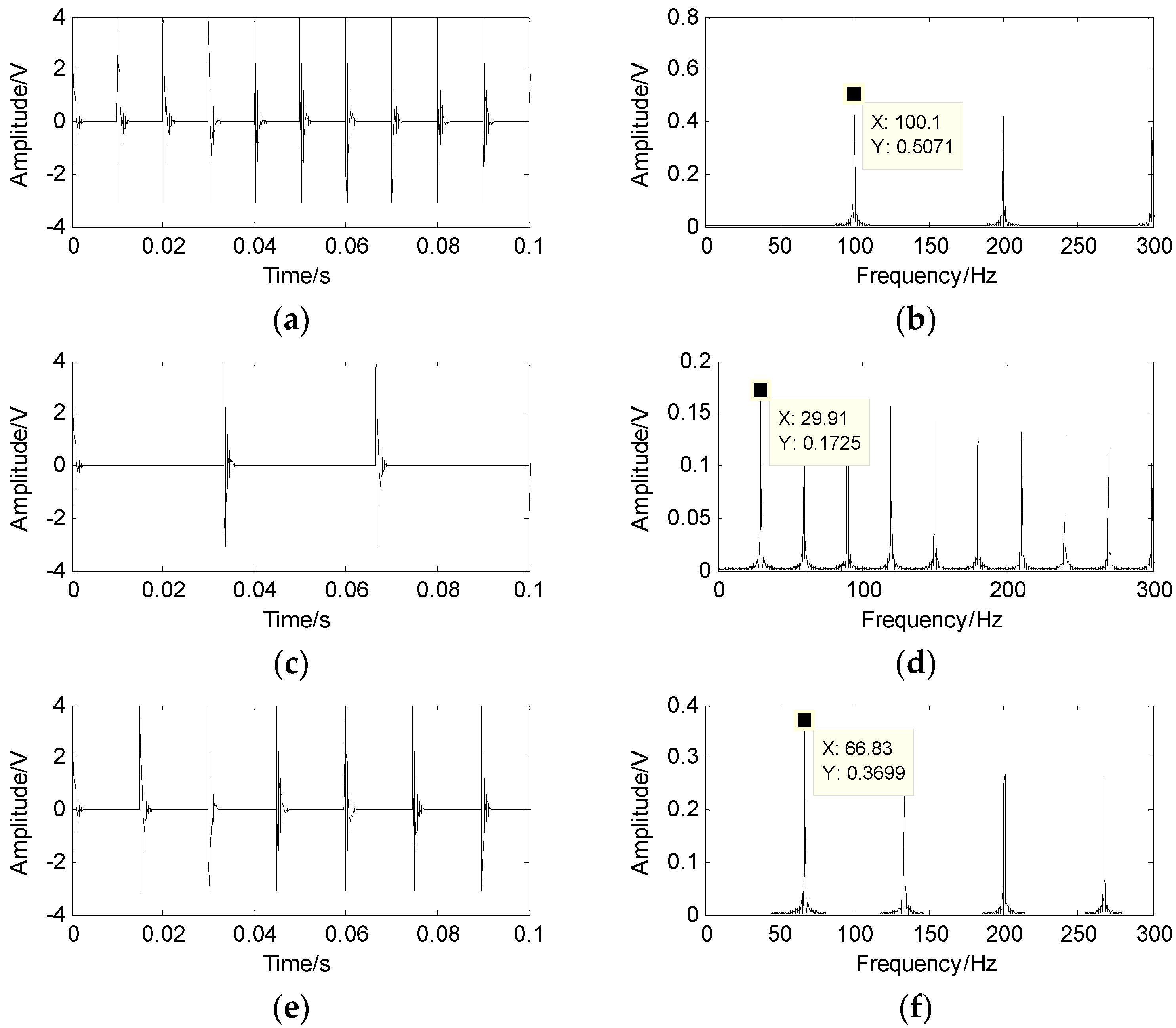
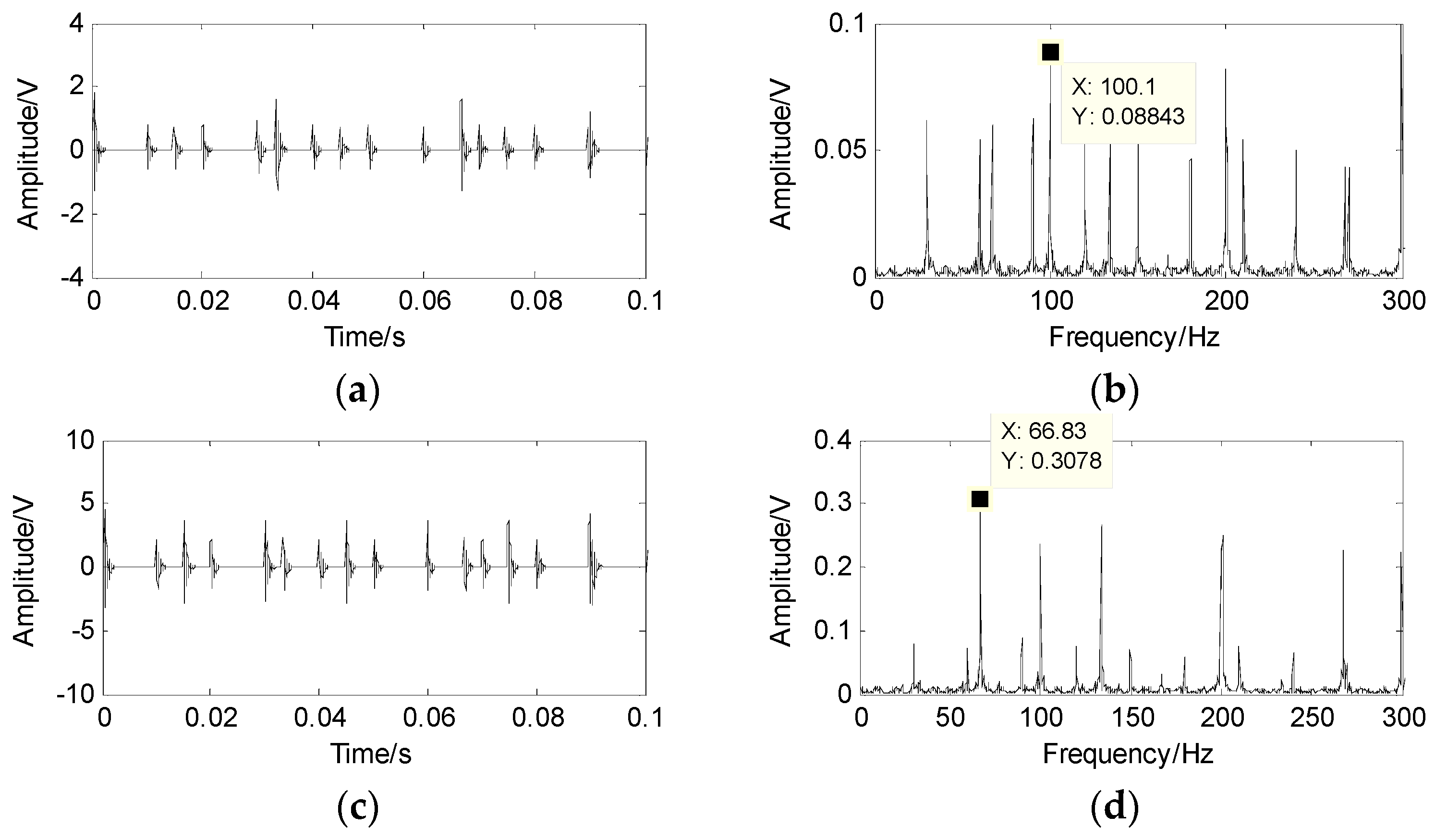
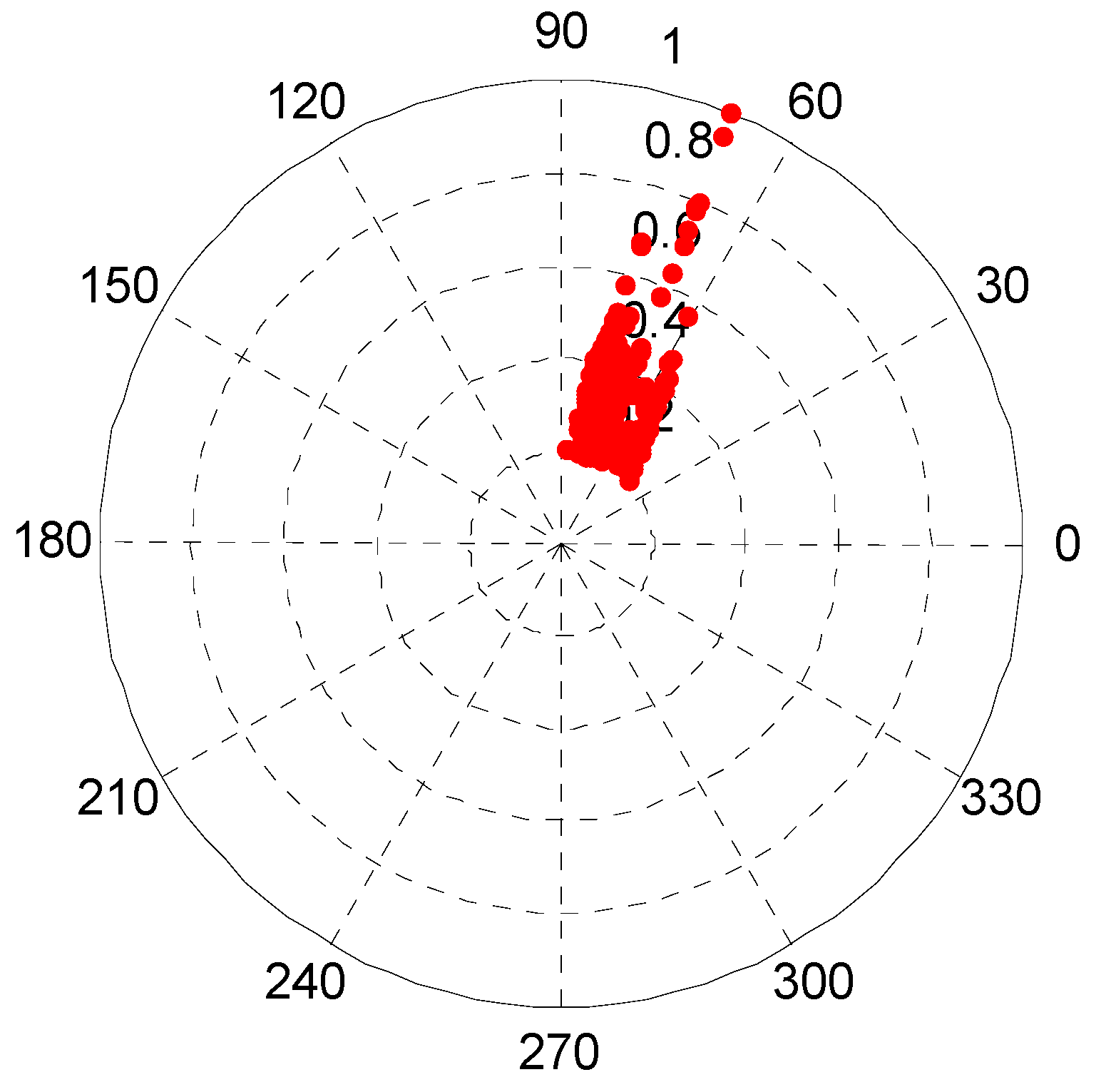
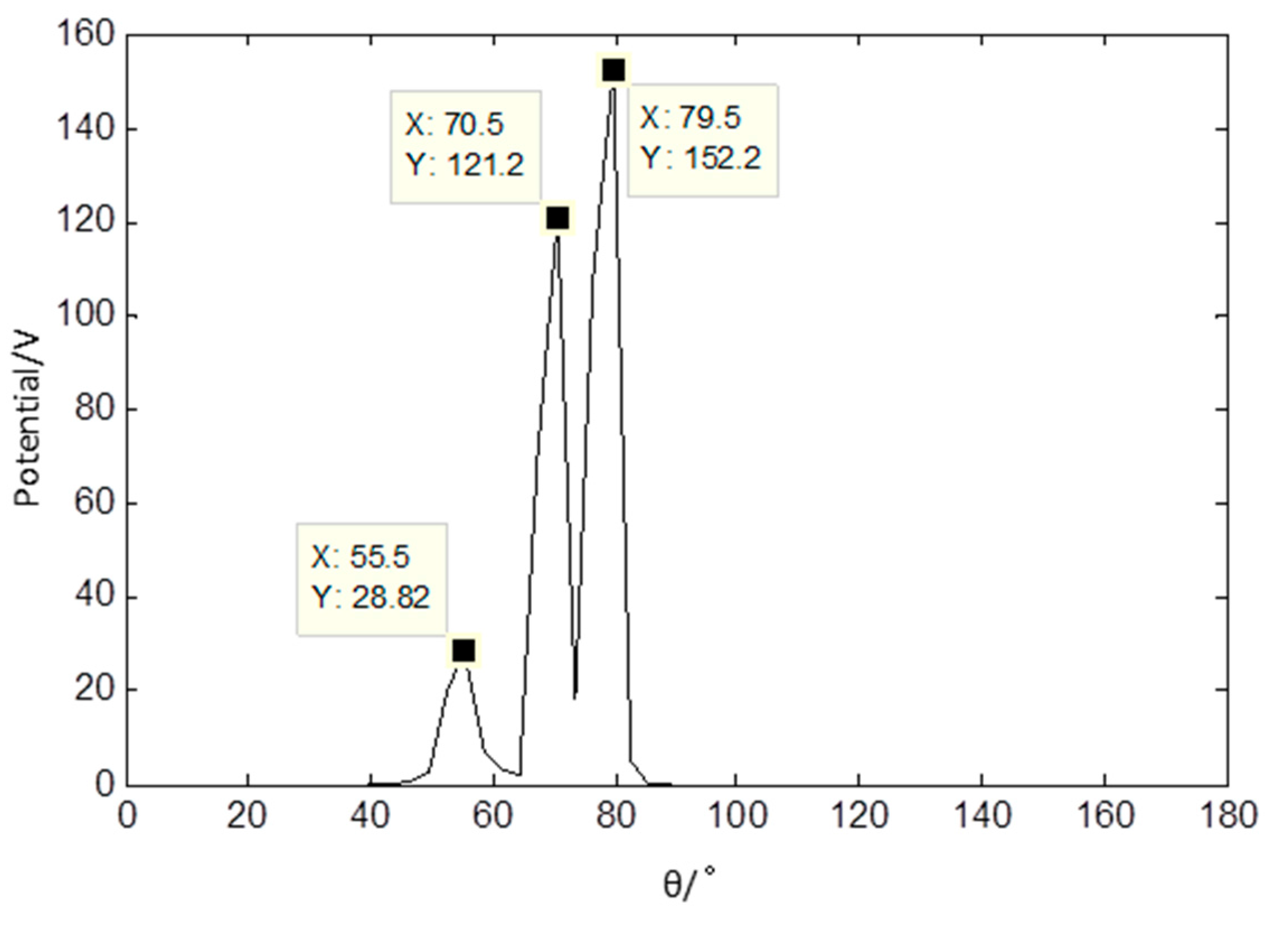
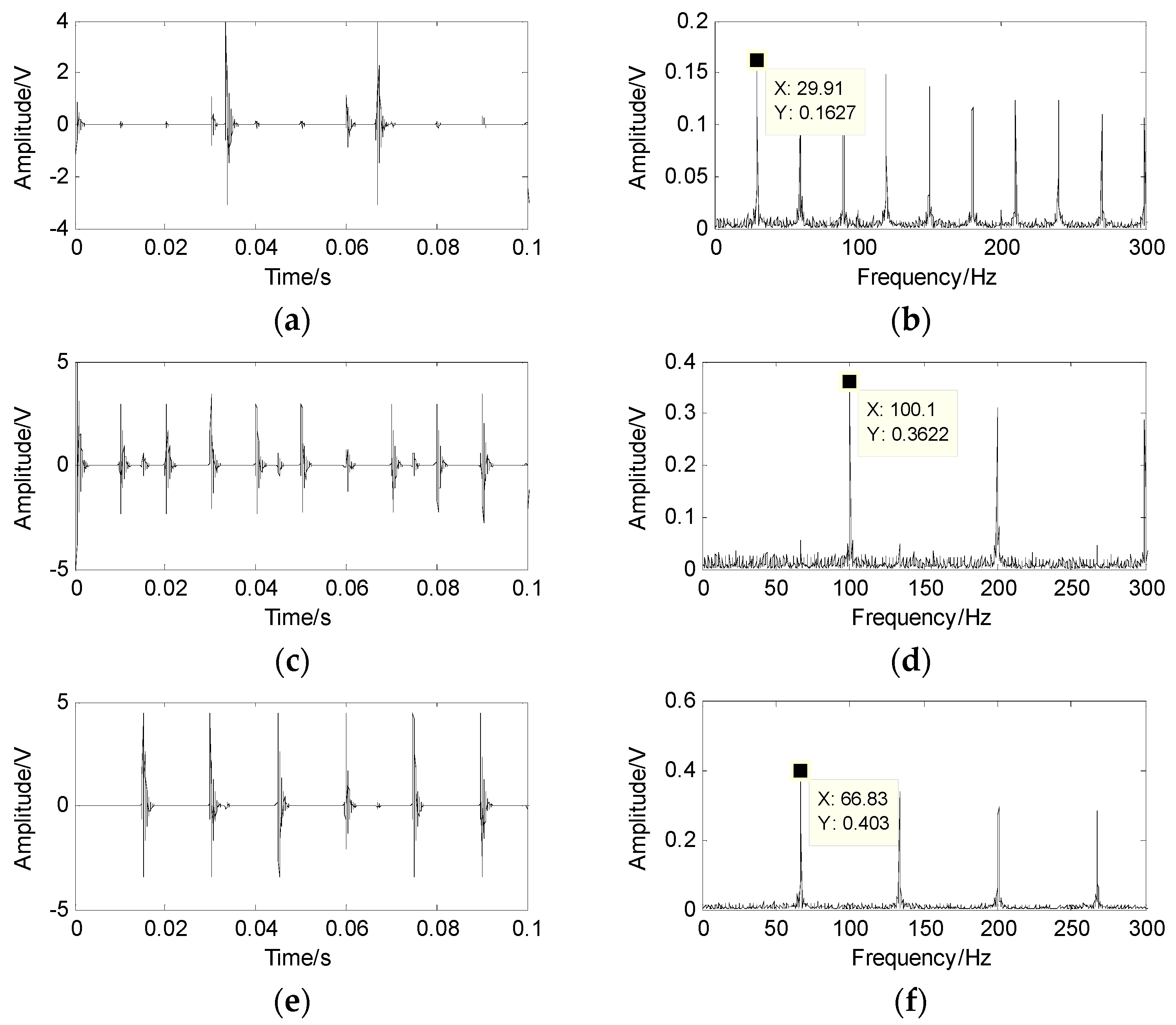
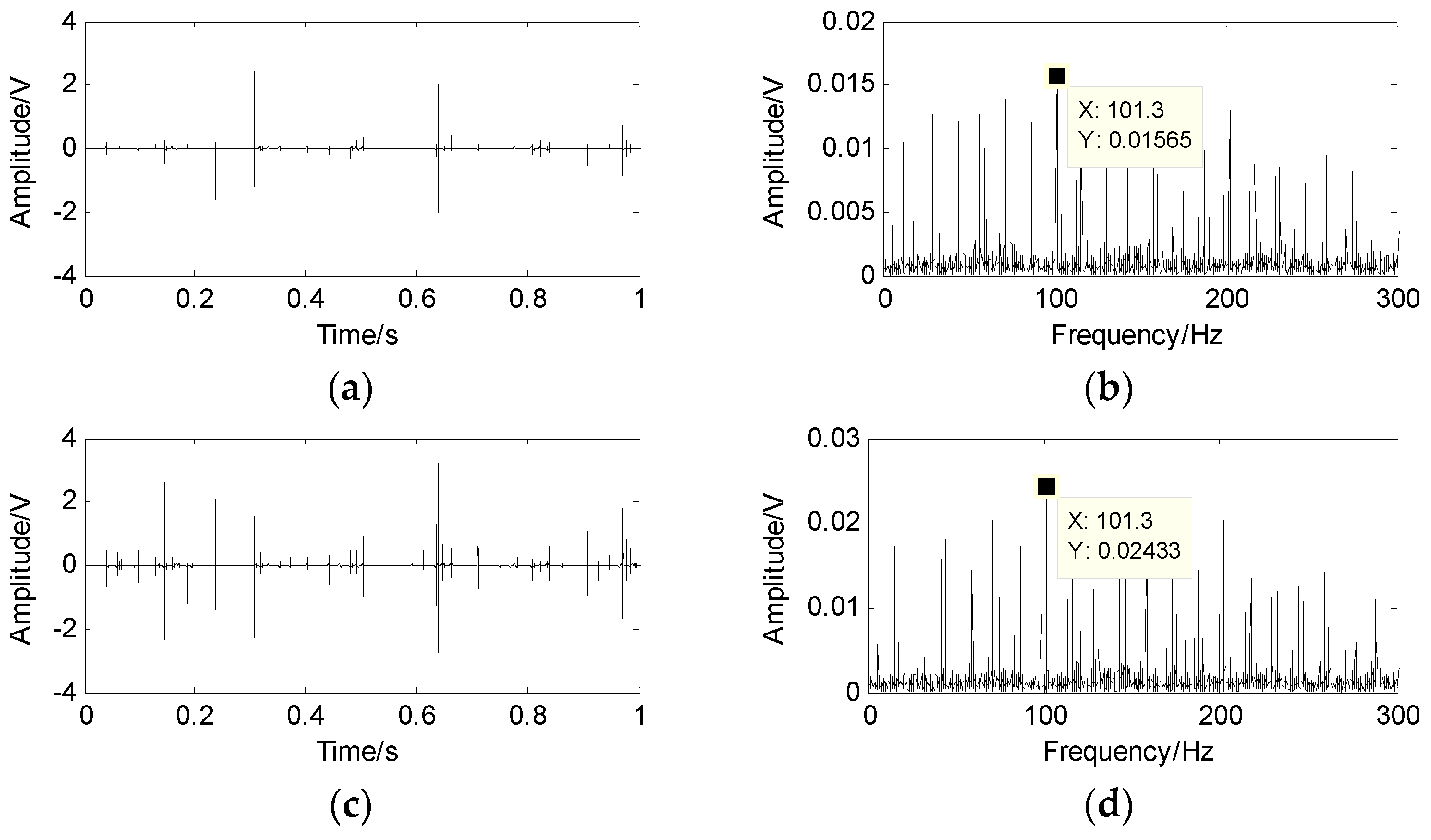
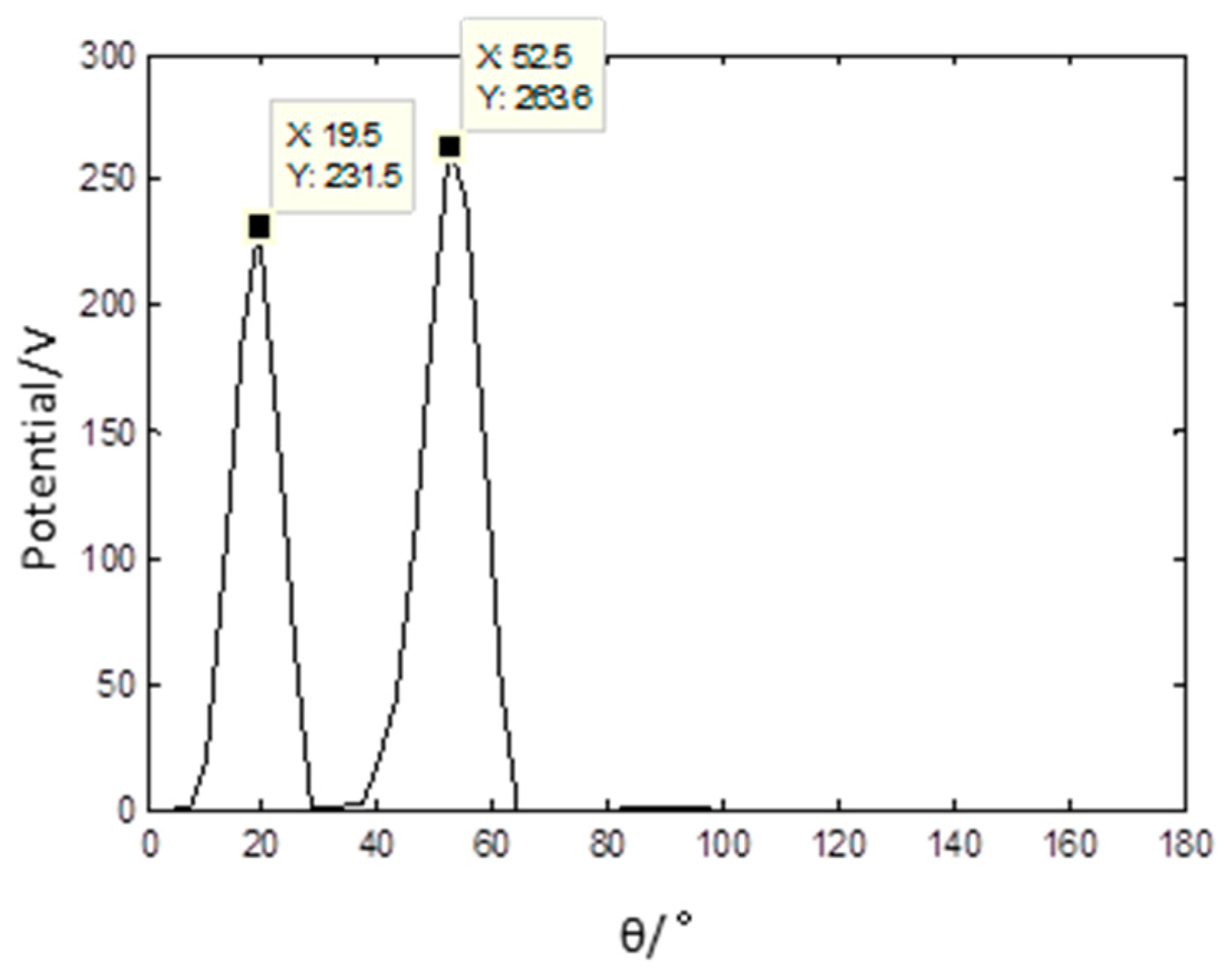
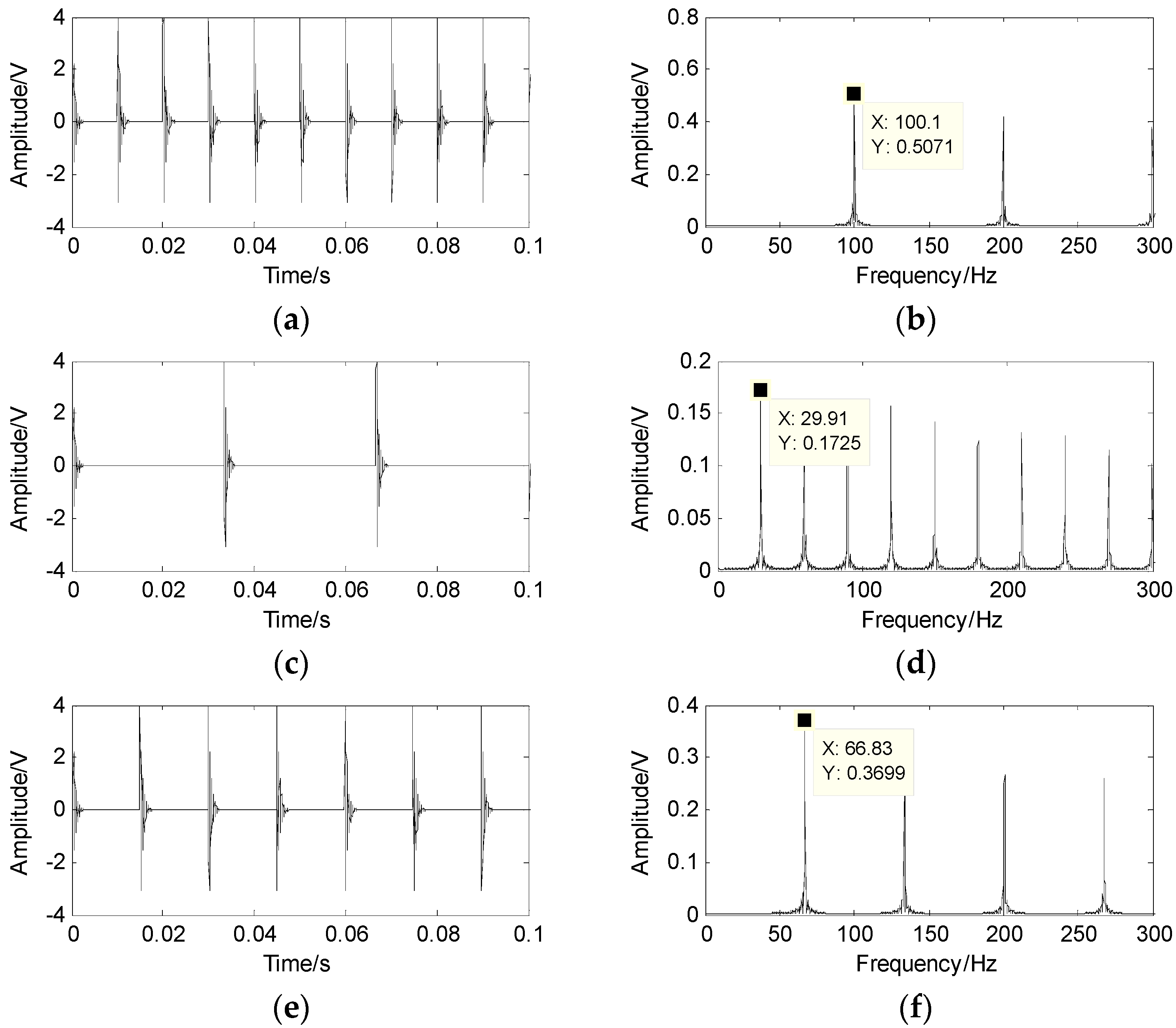
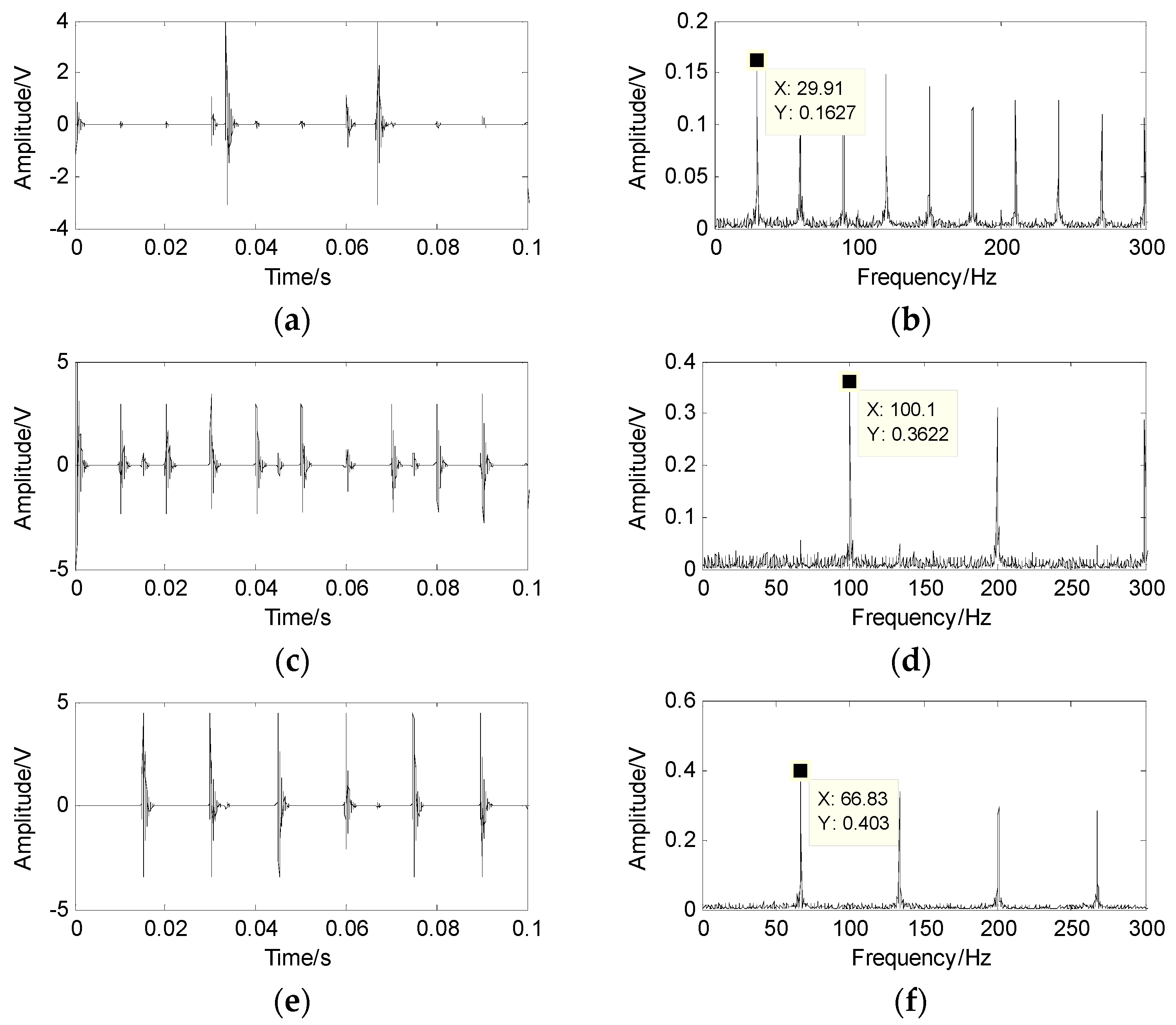
4.1. Simulation Analysis
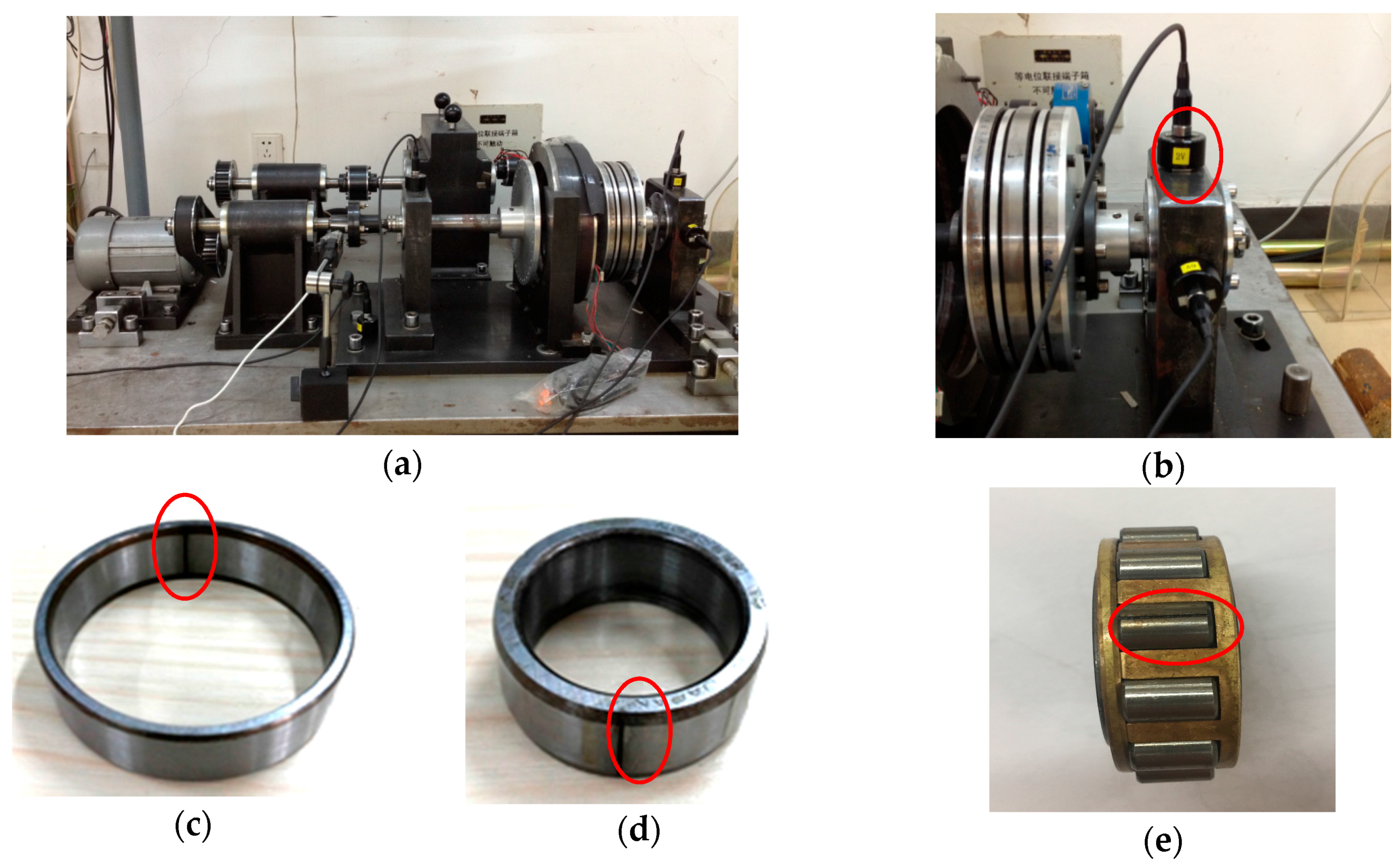
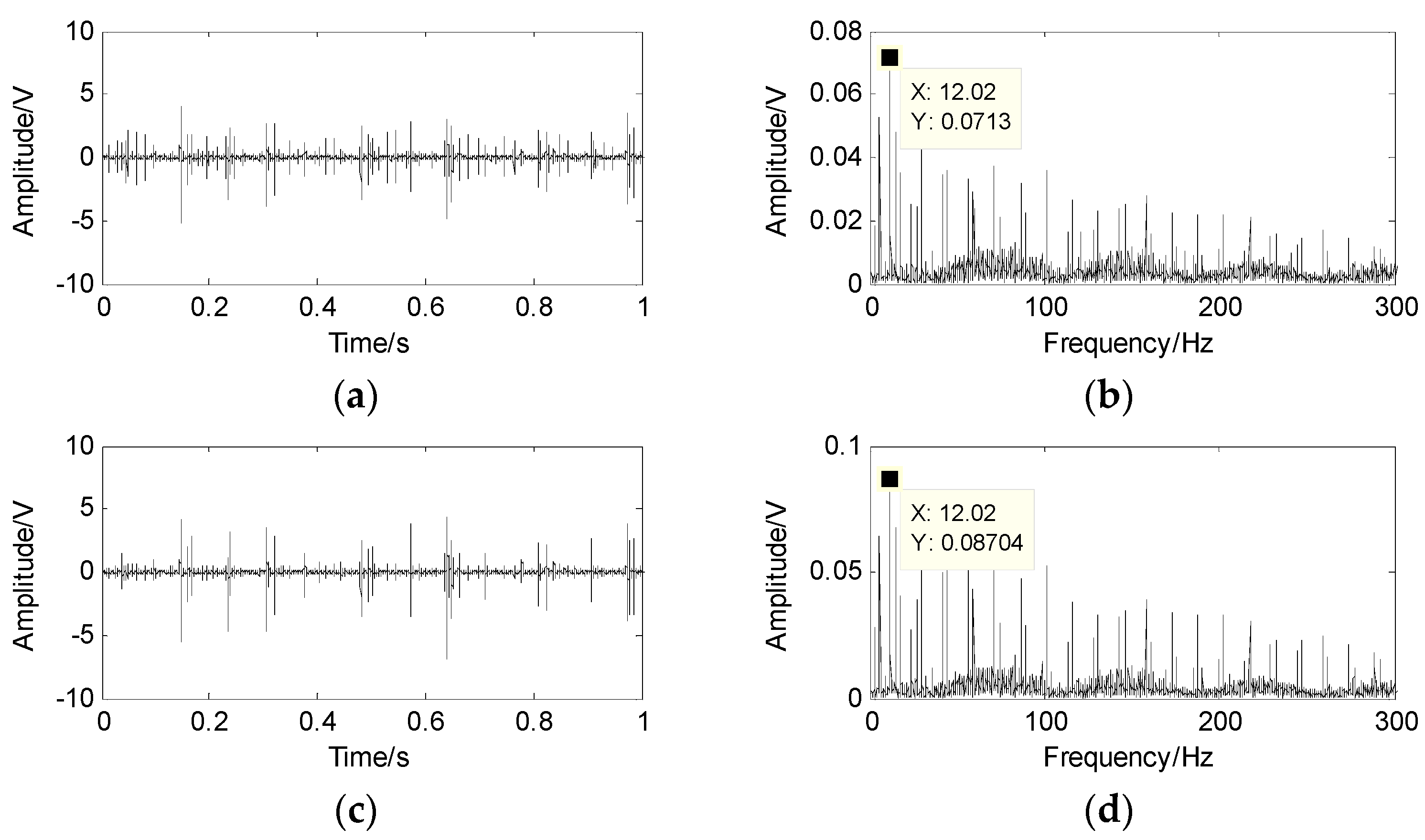
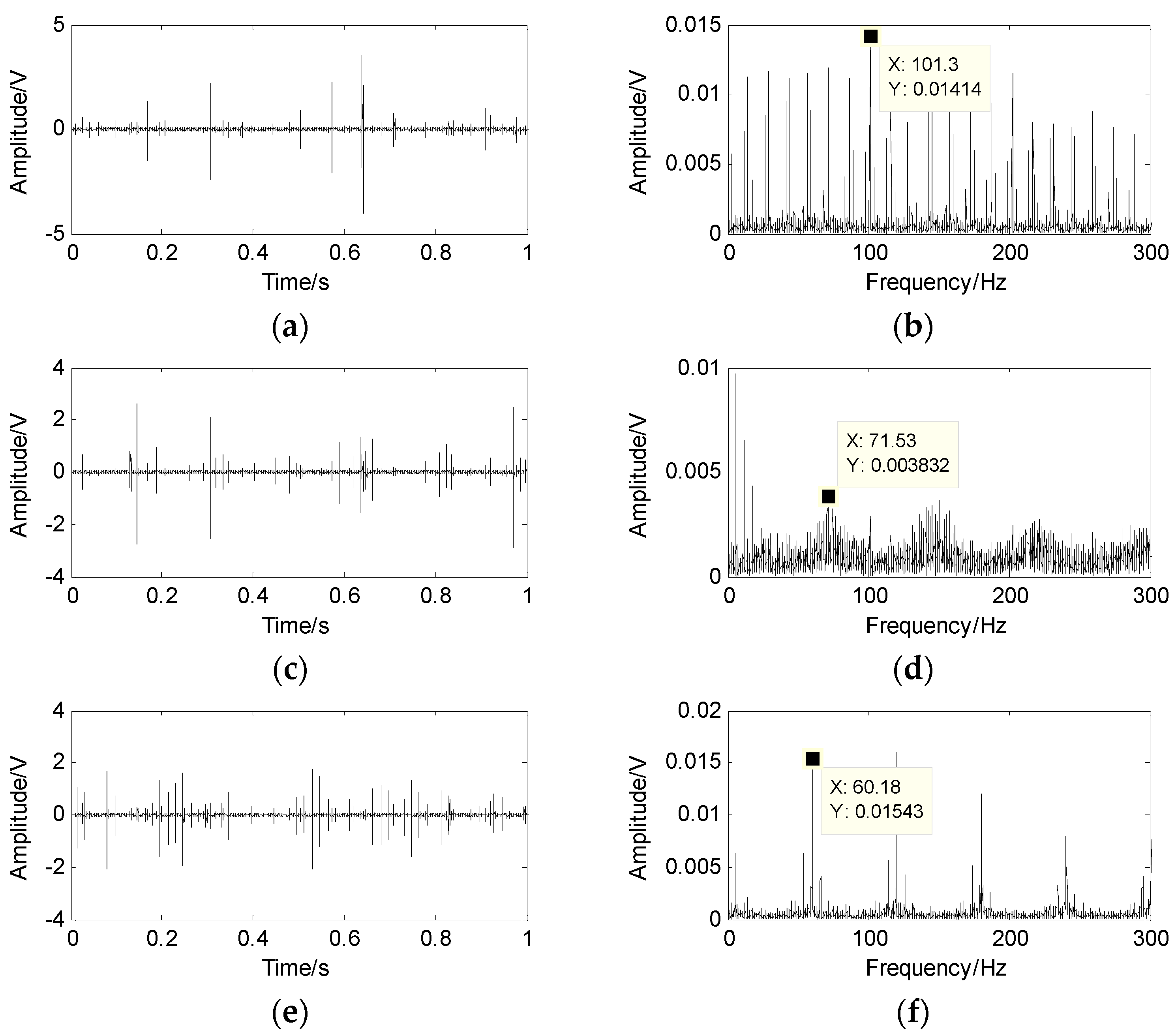
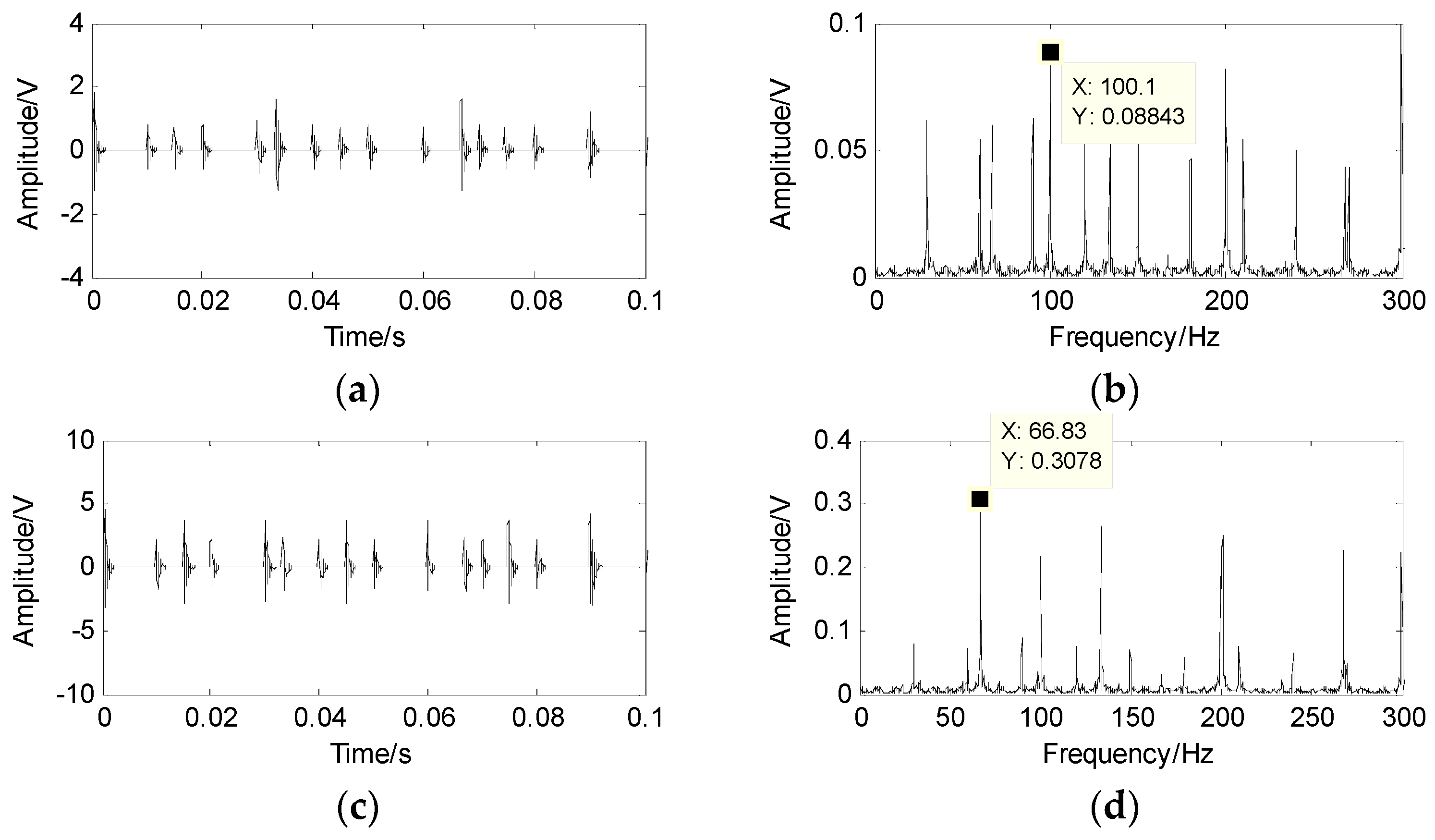
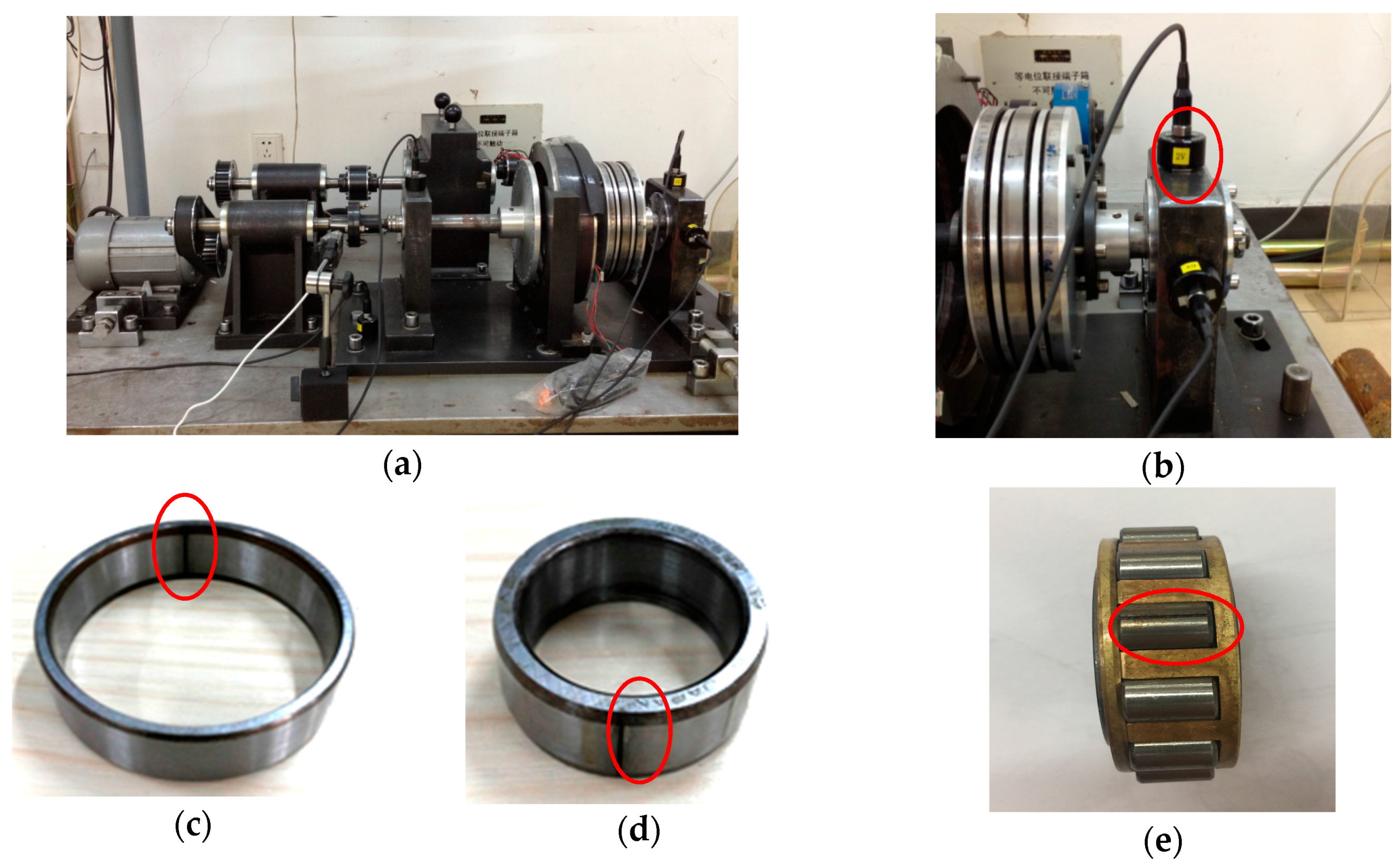
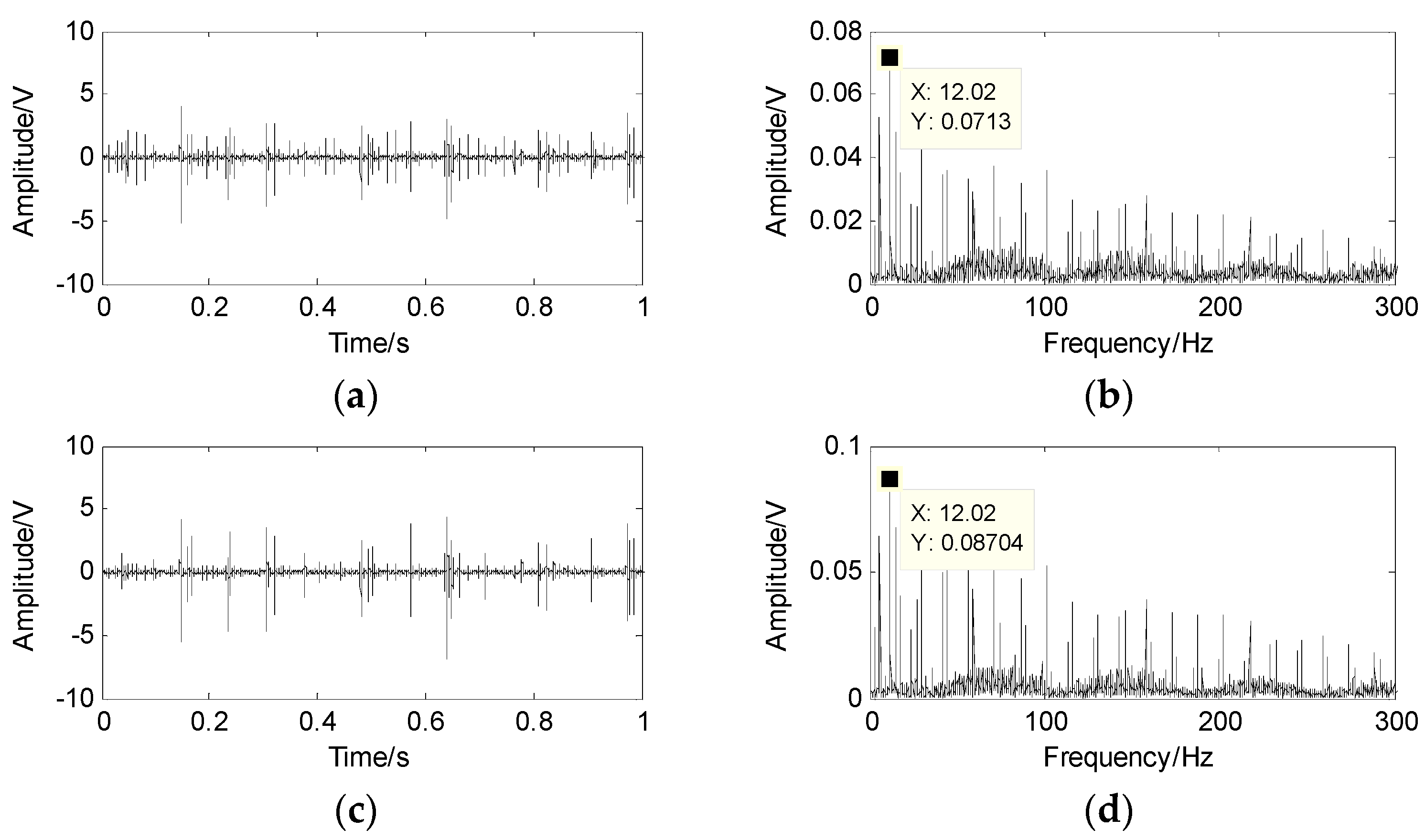
4.2. Experimental Verification and Discussion
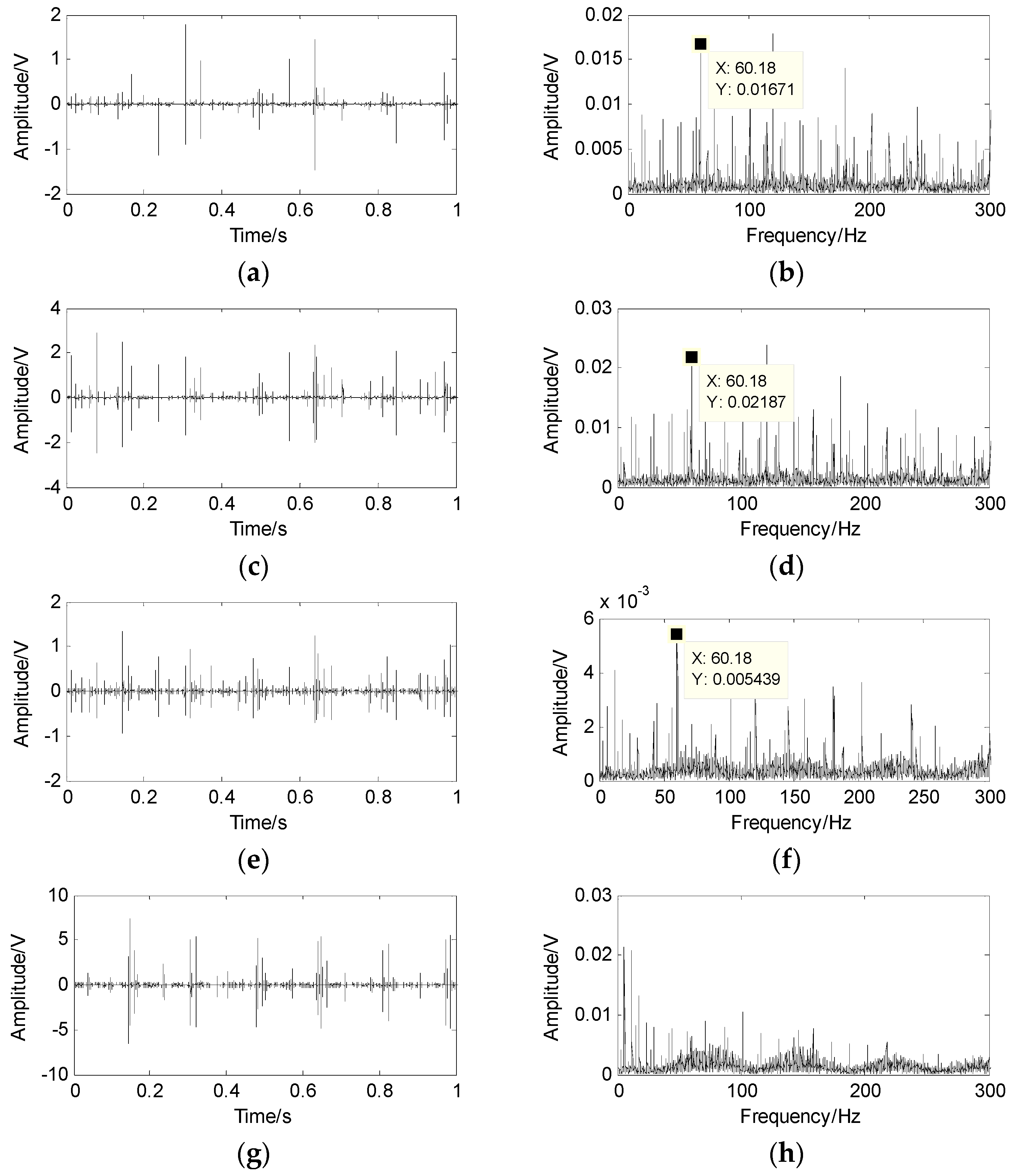
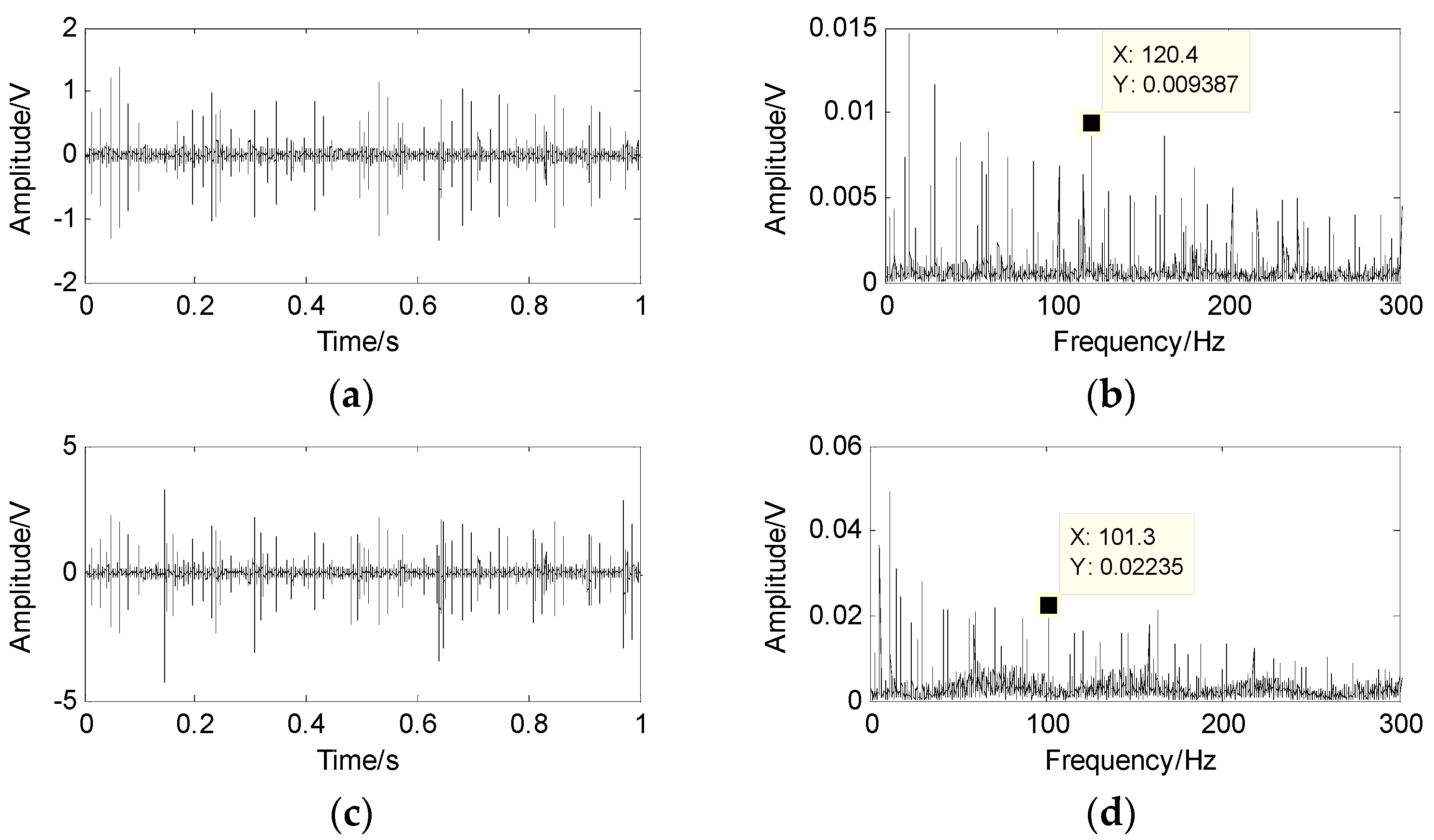
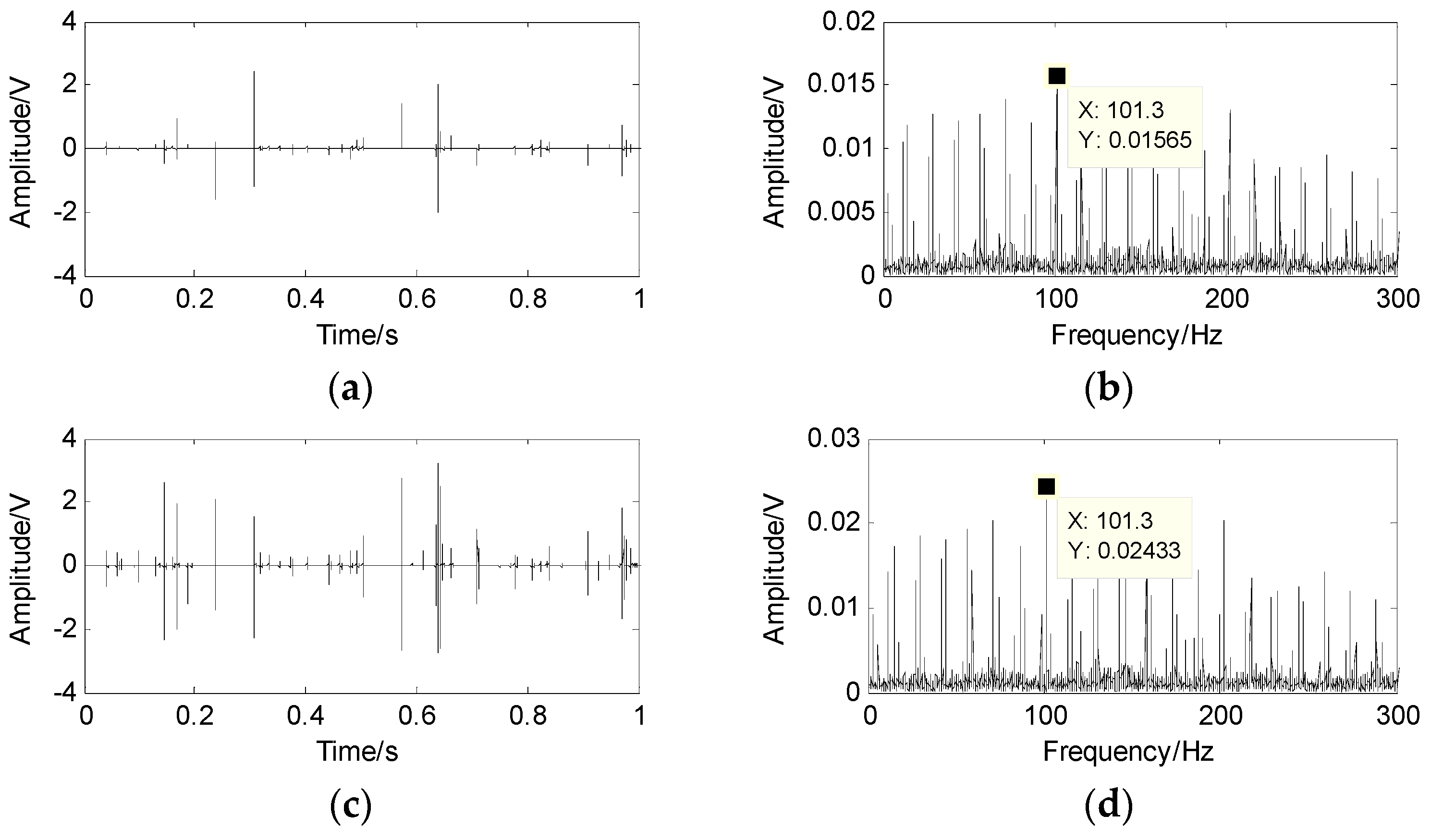
4.3. Comparison with the Traditional SCA
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yau, H.T.; Kuo, Y.C.; Chen, C.L.; Li, Y.C. Ball bearing test-rig research and fault diagnosis investigation. IET Sci. Meas. Technol. 2016, 10, 259–265. [Google Scholar] [CrossRef]
- Zhou, H.T.; Chen, J.; Dong, G.; Wang, H.C.; Yuan, H.D. Bearing fault recognition method based on neighborhood component analysis and coupled hidden Markov model. Mech. Syst. Signal Process. 2016, 66–67, 568–581. [Google Scholar] [CrossRef]
- Jia, F.; Lei, Y.G.; Lin, J.; Zhou, X.; Lu, N. Deep neural networks: A promising tool for fault characteristic mining and intelligent diagnosis of rotating machinery with massive data. Mech. Syst. Signal Process. 2016, 72, 303–315. [Google Scholar] [CrossRef]
- Li, C.; Sánchez, R.V.; Zurita, G.; Cerrada, M.; Cabrera, D. Fault Diagnosis for Rotating Machinery Using Vibration Measurement Deep Statistical Feature Learning. Sensors 2016, 16, 895. [Google Scholar] [CrossRef] [PubMed]
- Randall, R.B.; Antoni, J. Rolling element bearing diagnostics—A tutorial. Mech. Syst. Signal Process. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- Yan, X.; Jia, M.; Xiang, L. Compound fault diagnosis of rotating machinery based on OVMD and a 1.5-dimension envelope spectrum. Meas. Sci. Technol. 2016, 27, 075002. [Google Scholar] [CrossRef]
- Herault, J.; Jutten, C. Space or time adaptive signal processing by neural network models. Iie Trans. 1987, 151, 206–211. [Google Scholar]
- Jutten, C.; Herault, J. Blind separation of sources, Part 1: An adaptive algorithm based on neuromimetic architecture. Signal Process. 1991, 24, 1–10. [Google Scholar] [CrossRef]
- Li, H.K.; Liu, H.Y.; He, C.B. Blind Source Separation for Under-Determined Mixtures Based on Time-Frequency Analysis. Key Eng. Mater. 2016, 693, 1350–1356. [Google Scholar] [CrossRef]
- Huang, X.; Jin, X.; Fu, H. Short-Sampled Blind Source Separation of Rotating Machinery Signals Based on Spectrum Correction. Shock Vib. 2016, 2016, 1–10. [Google Scholar] [CrossRef]
- Mahvash, A.; Lakis, A.A. Independent component analysis as applied to vibration source separation and fault diagnosis. J. Vib. Control 2014, 22, 1682–1692. [Google Scholar] [CrossRef]
- Tang, G.; Luo, G.G.; Zhang, W.; Yang, C.; Wang, H. Underdetermined blind source separation with variational mode decomposition for compound roller bearing fault signals. Sensors 2016, 16, 897. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.J.; Gao, R.X.; Yan, R.Q. Integration of EEMD and ICA for wind turbine gearbox diagnosis. Wind Energy 2014, 17, 757–773. [Google Scholar] [CrossRef]
- Gu, Q.W.; Jin, W.D.; Yu, Z.B. Blind source separation of single-channel train signal based on EEMD and ICA. Appl. Res. Comput. 2014, 31, 1551. [Google Scholar]
- Hyvärinen, A.; Oja, E. Independent component analysis: Algorithms and applications. Neural Netw. 2000, 13, 411–430. [Google Scholar] [CrossRef]
- Shimizu, S.; Hoyer, P.O.; Hyvärinen, A.; Kerminen, A. A Linear Non-Gaussian Acyclic Model for Causal Discovery. J. Mach. Learn. Res. 2006, 7, 2003–2030. [Google Scholar]
- Olshausen, B.A.; Field, D.J. Emergence of simple-cell receptive field properties by learning a sparse code for natural images. Nature 1996, 381, 607–609. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Cichocki, A. Sparse representation of images using alternating linear programming. In Proceedings of the IEEE International Symposium on Signal Processing and ITS Applications, Paris, France, 4 July 2003; Volume 1, pp. 57–60. [Google Scholar]
- Li, Y.; Cichocki, A.; Amari, S. Analysis of sparse representation and blind source separation. Neural Comput. 2004, 16, 1193–1234. [Google Scholar] [CrossRef] [PubMed]
- Georgiev, P.; Theis, F.; Cichocki, A. Sparse component analysis and blind source separation of underdetermined mixtures. IEEE Trans. Neural Netw. 2005, 16, 992–996. [Google Scholar] [CrossRef] [PubMed]
- Georgiev, P.; Theis, F.; Cichocki, A.; Bakardjian, H. Sparse Component Analysis: A New Tool for Data Mining. Date Mining in Biomedicine; Springer: Philadelphia, PA, USA, 2007. [Google Scholar]
- Bofill, P.; Zibulevsky, M. Underdetermined blind source separation using sparse representations. Signal Process. 2001, 81, 2353–2362. [Google Scholar] [CrossRef]
- Zhong, Y.; Wang, X.; Zhao, L.; Feng, R.; Zhang, L.; Xu, Y. Blind spectral unmixing based on sparse component analysis for hyperspectral remote sensing imagery. ISPRS J. Photogramm. Remote Sens. 2016, 119, 49–63. [Google Scholar] [CrossRef]
- Hu, C.Z.; Yang, Q.; Yan, W. Sparse component analysis based underdetermined blind source separation for bearing fault feature extraction in wind turbine gearbox. IET Renew. Power Gener. 2017, 11, 330–337. [Google Scholar] [CrossRef]
- Theis, F.J.; Lang, E.W.; Puntonet, C.G. A geometric algorithm for overcomplete linear ICA. Neurocomputing 2002, 56, 381–398. [Google Scholar] [CrossRef]
- Cohen, A.; Daubechies, I.; Feauveau, J. Biorthogonal bases of compactly supported wavelets. Commun. Pure Appl. Math. 1992, 45, 485–560. [Google Scholar] [CrossRef]
- Qin, Y.; Mao, Y.; Tang, B. Multicomponent decomposition by wavelet modulus maxima and synchronous detection. Mech. Syst. Signal Process. 2017, 91, 57–80. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Rollers | External Diameter (mm) | Inner Diameter (mm) | Width (mm) |
|---|---|---|---|
| 10 | 47 | 20 | 14 |
| Fault Location | Fault Characteristic Frequency |
|---|---|
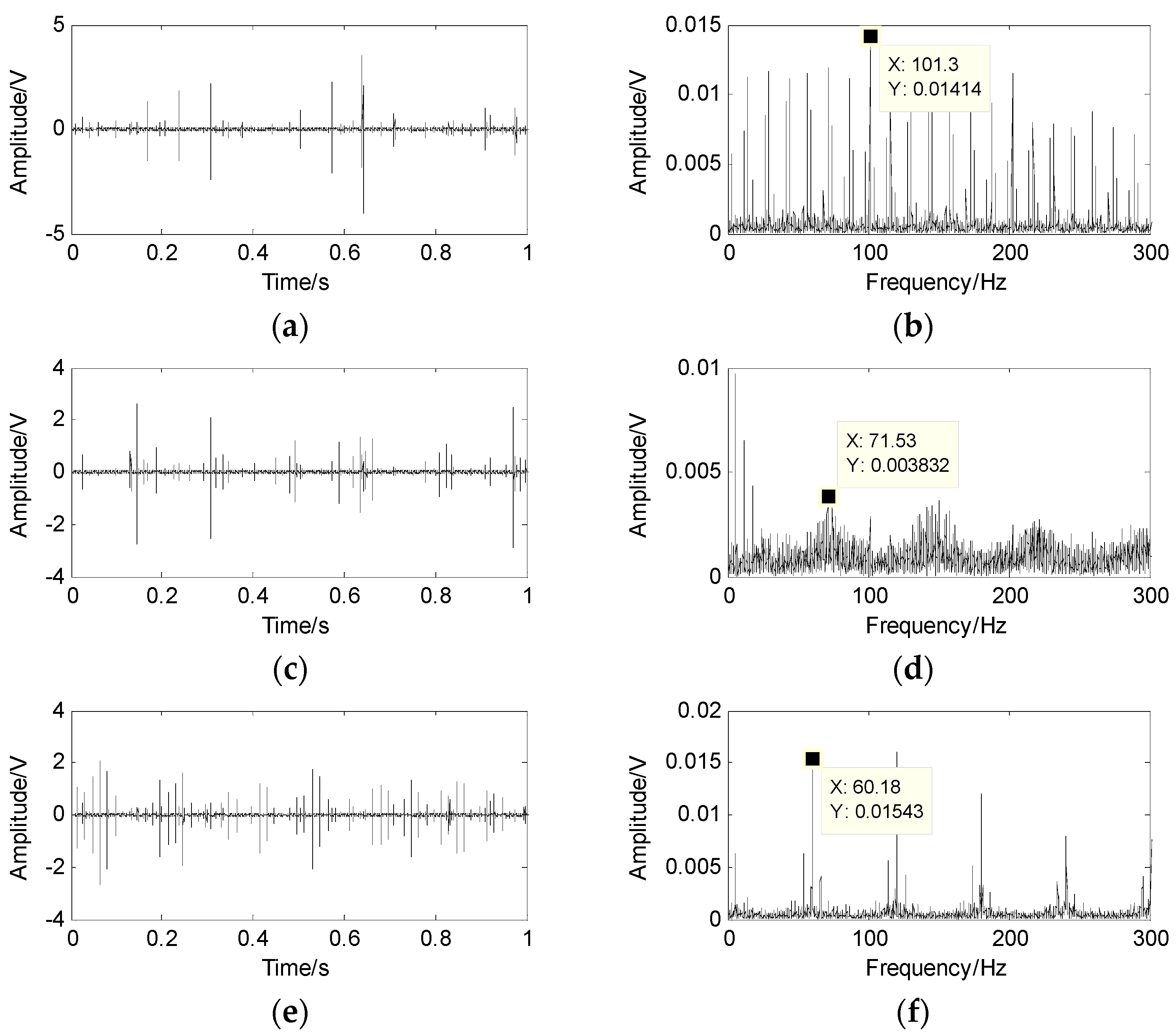
| Outer race | 60 Hz |
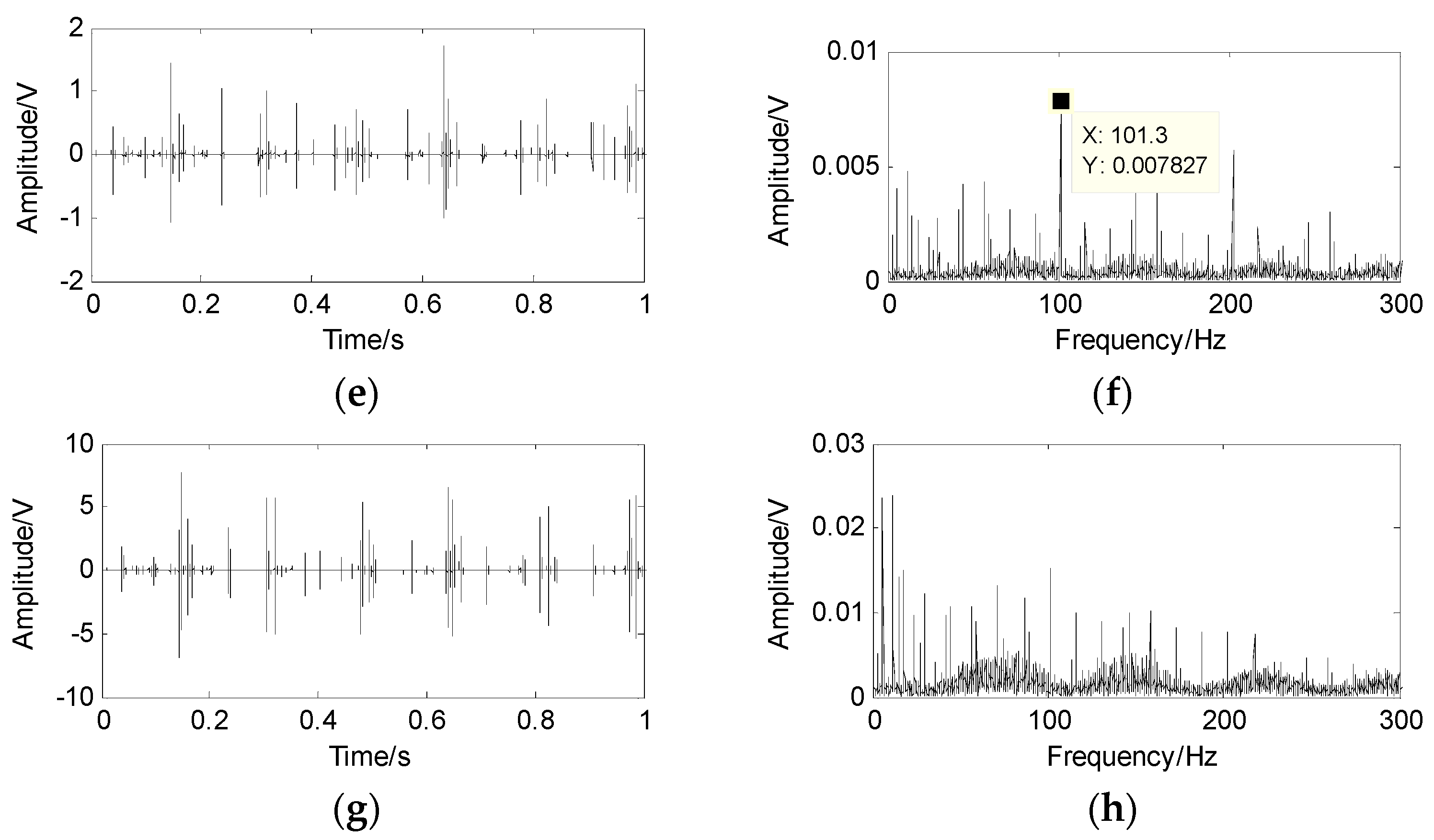
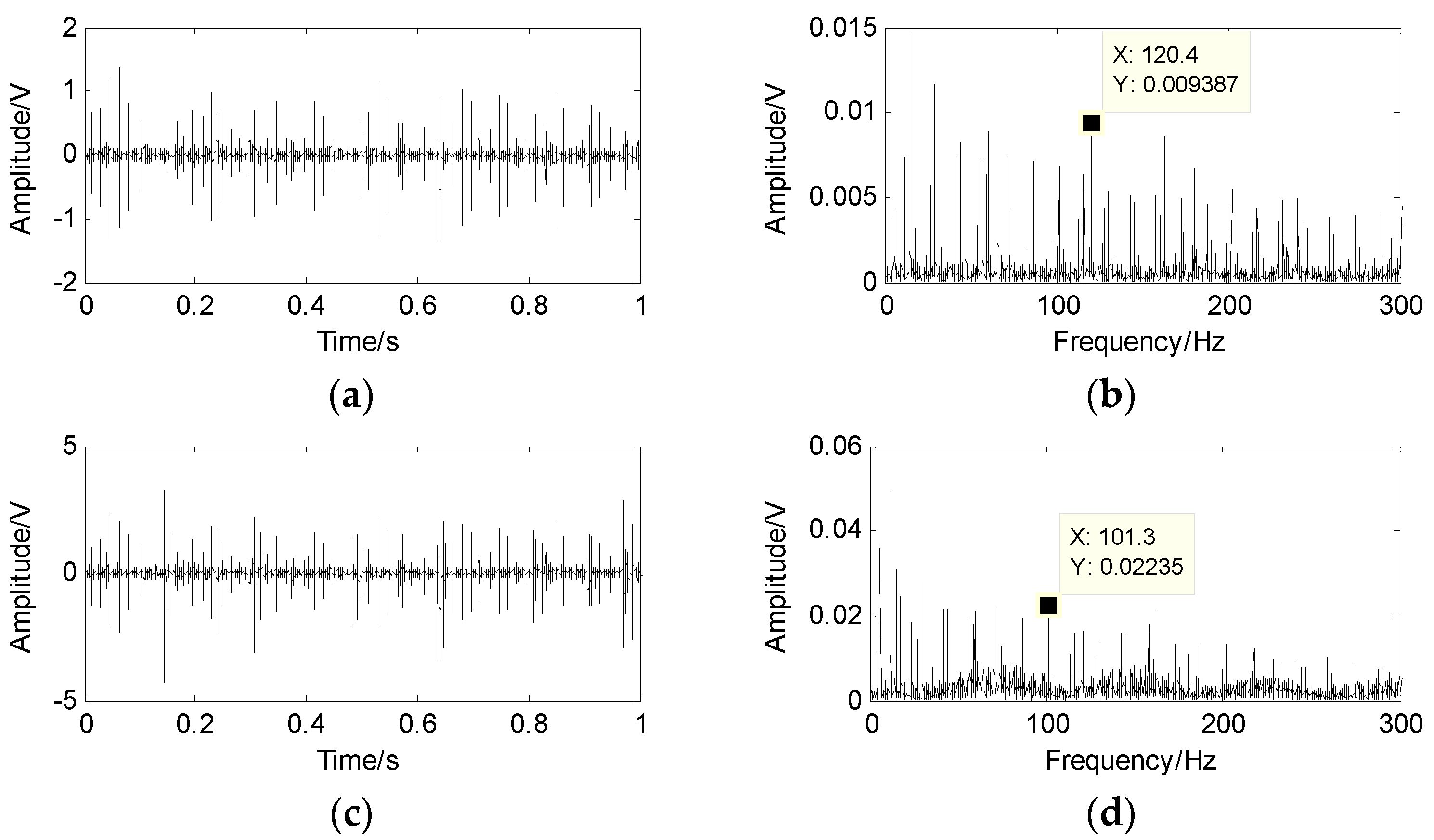
| Inner race | 101 Hz |
| Roller | 72 Hz |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, Y.; Song, L.; Ke, Y.; Wang, H.; Chen, P. Diagnosis of Compound Fault Using Sparsity Promoted-Based Sparse Component Analysis. Sensors 2017, 17, 1307. https://doi.org/10.3390/s17061307
Hao Y, Song L, Ke Y, Wang H, Chen P. Diagnosis of Compound Fault Using Sparsity Promoted-Based Sparse Component Analysis. Sensors. 2017; 17(6):1307. https://doi.org/10.3390/s17061307
Chicago/Turabian StyleHao, Yansong, Liuyang Song, Yanliang Ke, Huaqing Wang, and Peng Chen. 2017. "Diagnosis of Compound Fault Using Sparsity Promoted-Based Sparse Component Analysis" Sensors 17, no. 6: 1307. https://doi.org/10.3390/s17061307
APA StyleHao, Y., Song, L., Ke, Y., Wang, H., & Chen, P. (2017). Diagnosis of Compound Fault Using Sparsity Promoted-Based Sparse Component Analysis. Sensors, 17(6), 1307. https://doi.org/10.3390/s17061307