1. Introduction
Array signal processing has been widely used in the fields of sonar, radar, wireless communication, etc, and many excellent algorithms have been developed in the past few years. Especially the well-known multiple signal classification (MUSIC) algorithm has not only been applied in its time-reversal (TR) form to active location [
1,
2,
3,
4], but has also been widely used in direction-of-arrival (DOA) estimation (DOA is the research of passive location). In the last few years, DOA estimation became an important research branch of array signal processing [
5,
6,
7]. Especially two-dimensional (2D) direction-of-arrival (DOA) estimation with different structured arrays, such as L-shaped uniform linear arrays (ULAs) [
8,
9,
10], two-parallel ULAs [
11,
12,
13], and uniform rectangular arrays (URAs) [
14,
15,
16,
17,
18], has received much attention in past years. For URAs, the well-known multiple signal classification (MUSIC) algorithm can be used for 2D DOA estimation directly [
16]; however, its computational complexity is very high. To overcome this problem, two efficient 2D DOA estimation methods have been proposed [
17,
18]. In [
17], the reduced-dimension MUSIC algorithm was proposed, which reduced the computational complexity, and the 2D DOA estimation performance was very close to the 2D-MUSIC method. A preprocessing transformation matrix was introduced in [
18], which transformed both the complex-valued covariance matrix and the complex-valued search vector into real-valued ones, then the 2D DOA estimation problem was decoupled into two successive real-valued one-dimensional (1D) DOA estimation problems with real-valued computations only. However, only the covariance matrix was considered, which characterizes the circular Gaussian distribution in the above 2D DOA methods.
In recent years, the issue of utilizing noncircular information has been attracting increasing attention. Abeida et al. presented a theoretical analysis of the resolution of the conventional and noncircular MUSIC algorithms and proved that the noncircular MUSIC algorithm for the threshold array signal-to-noise ratios are very sensitive to the noncircularity phase separation of the sources [
19]. Pascal et al. introduced the optimal widely linear (WL) minimum variance distortionless response (MVDR) beamformer for the reception of an unknown signal of interest (SOI) corrupted by potentially second-order (SO) noncircular background noise and interference [
20]. Wan et al. [
21] proposed an algorithm that utilized the noncircular characteristic to solve the DOA estimation of coherently distributed sources. Because the covariance matrix and the elliptic covariance matrix (which is also named the complementary covariance or pseudo-covariance) are used in non-circular signals direction-finding method simultaneously, the DOA estimation performance can be improved greatly by exploiting the noncircularity information. Gan et al. studied the non-circular characteristics of the signals and proposed an automatically-paired 2D DOAs estimation method based on non-circular signals [
22]. Based on strictly non-circular signals, Steinwandt et al. proposed the high-resolution
NCstandard ESPRIT and the
NC unitary ESPRIT algorithms, which are applicable to arbitrary shift-invariant
antenna arrays and do not require a centro-symmetric array structure [
23]. In [
24], an extended rank reduction (ERARE) method was introduced for noncircular sources based on two-parallel ULAs, which made the estimation more accurate than that in [
12].
However, in modern wireless communications, a usual situation is that some users send circular signals such as quadrature phase shift keying (QPSK) signals, but others send non-circular ones such as binary phase shift keying (BPSK) signals. Therefore, the signals impinging to the array may be mixed ones. As for the mixed signals situation, a key issue is how to estimate and distinguish the circular and non-circular signals. In [
25,
26], the mixed signals situation issue has been studied, and the corresponding methods based on 1D arrays have been proposed. Gao et al. [
25] combined the observed data and their conjugate counterparts to construct two 1D DOA estimators for detecting the circular and non-circular signals, but the DOA estimation performance of the method degraded seriously in the condition of a small separating angle. Liu et al. proposed an improved algorithm in [
26], which detected the circular and non-circular signals by using the difference between the circularity of the mixed sources. However, to the best of our knowledge, few research works have reported the 2D DOA estimation problem for mixed circular and non-circular signals. In [
27], based on two-parallel uniform linear arrays (ULAs), Chen proposed an effective algorithm that combined the rank reduction method and MUSIC algorithm to form four 1D DOA estimators for solving the 2D mixed signals situation. Nevertheless, the computational complexity of the algorithm in [
27] is still high, and the theoretical performance analysis is never mentioned in this research.
In this paper, we study the 2D DOA estimation problem based on uniform rectangular arrays (URAs) using the rank-reduction-based ROOT-MUSIC method and the theoretical performance analysis of the proposed algorithm. Firstly, we establish an array model with mixed circular and noncircular sources with URAs; secondly, to avoid seeking the peak of the spectrum and reduce the computation load, a novel algorithm based on ROOT-MUSIC and the rank-reduction method is proposed to solve the 2D DOA estimation issue; finally, the theoretical error of the proposed algorithm is derived as a benchmark. Particularly, the paper mainly discusses the uncorrelated signals impinging upon the array. If we utilize some decorrelation methods such as the spatial smoothing technologies [
28,
29] or four-order cumulants-based Toeplitz matrices reconstruction (FOC-TMR) method [
13] to preprocess the correlated signals and obtain the de-correlated matrices, the proposed method can also be generalized to the case of correlated sources.
The rest of this paper is organized as follows.
Section 2 presents the array signal model. The description of the proposed algorithm is introduced in
Section 3. The theoretical error analysis of the proposed algorithm is derived in
Section 4. Finally, the simulation results are given in
Section 5, and conclusions are drawn in
Section 6.
Notations: , and represent conjugation, transpose and conjugate transpose. is the expectation operation; and stands for the diagonalization and block diagonalization operation, respectively; denotes the dimensional identity matrix; det indicates the determinant of a matrix; is the phase angle operator. Expect , , , , and representing the corresponding noise subspace; other variables have index n such as , which denote ones related to the non-circular signal. indicates a variable associated with the circular signal.
2. Problem Formulation
In this paper, we suppose that the number of signals is known or is estimated by the existing number detection technique in advance [
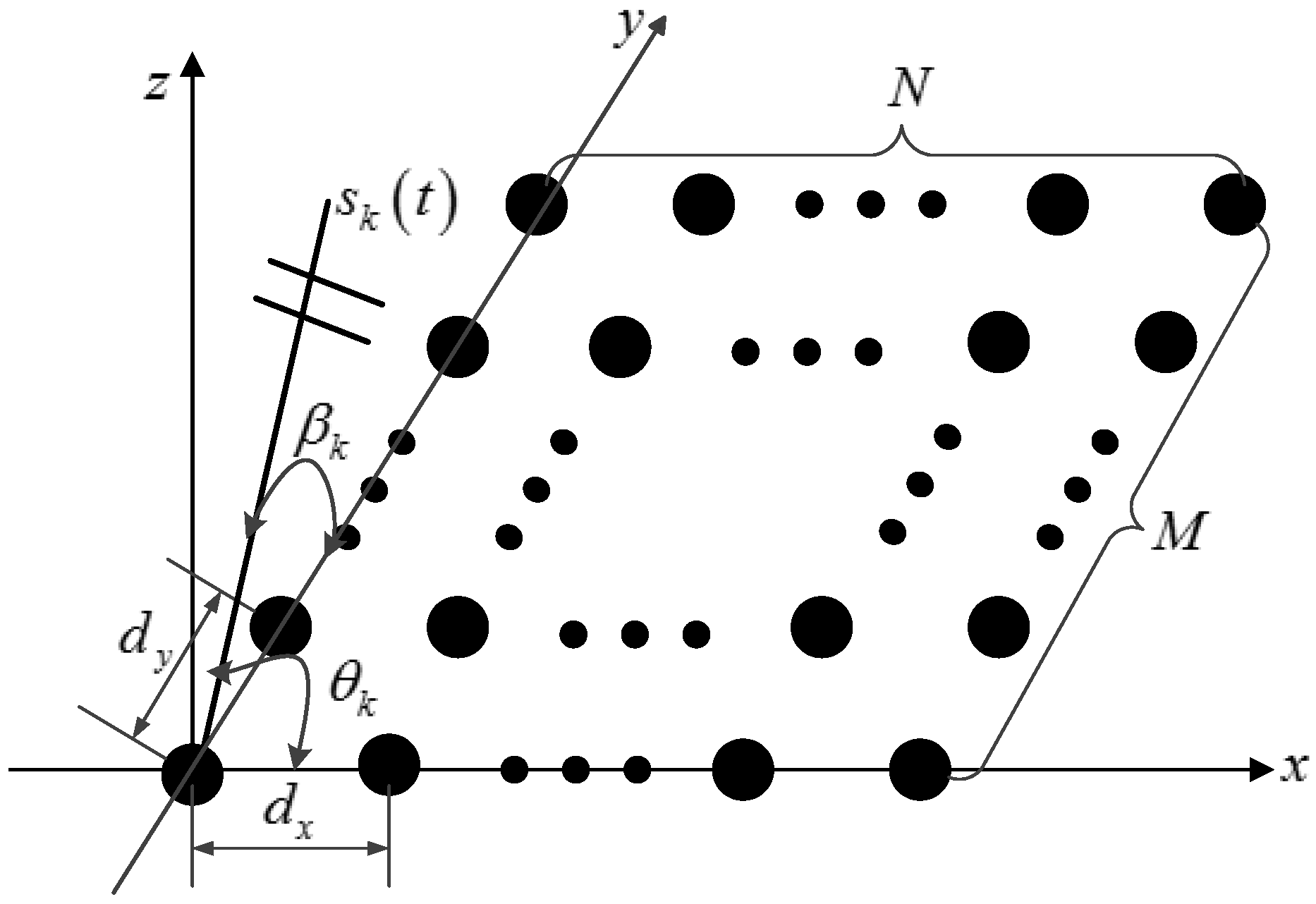
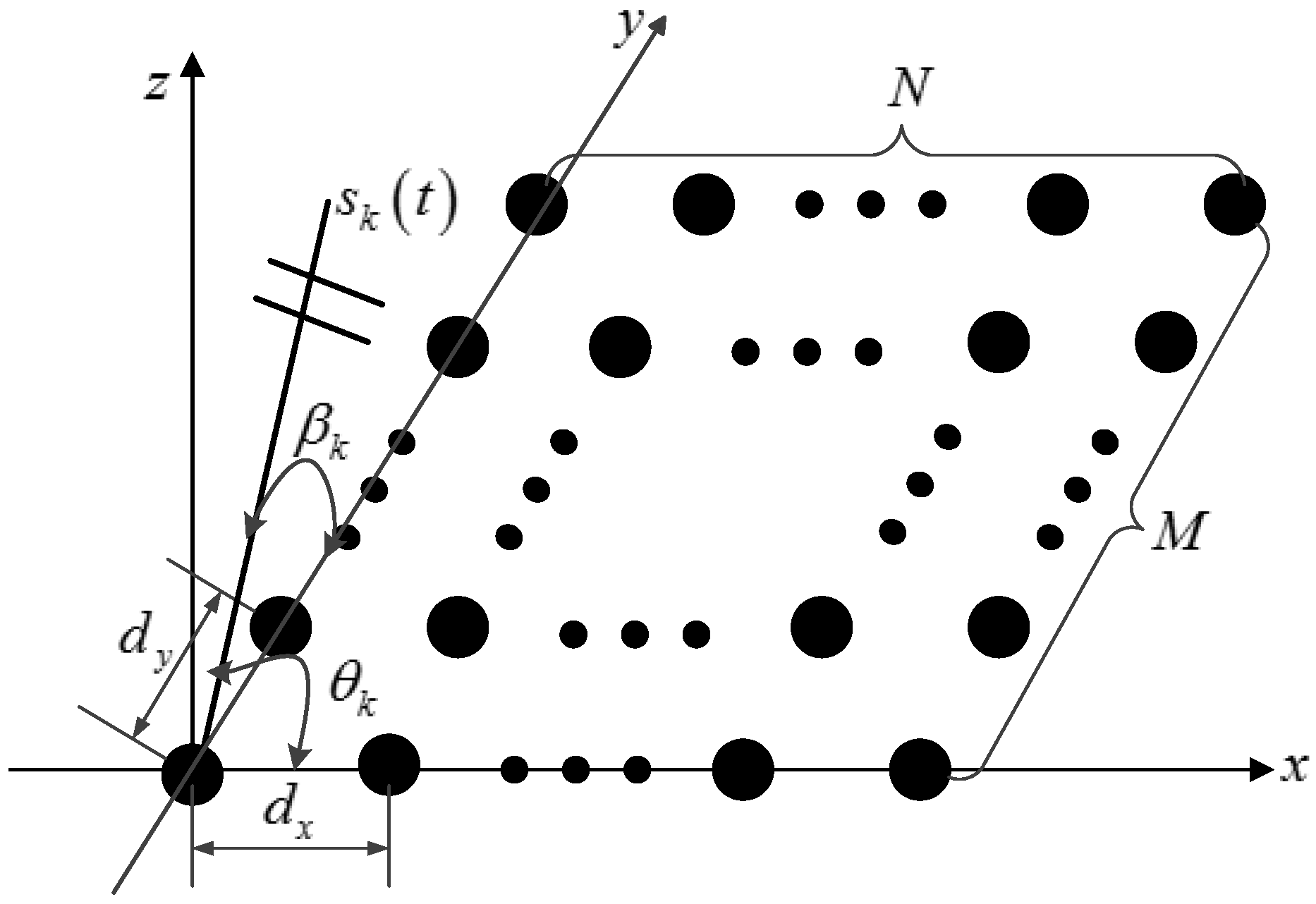
30]. As illustrated in
Figure 1, consider that
K uncorrelated far-field narrowband signals
(
k = 1, 2, ...,
K) impinging upon the array with
noncircular signals
and
circular signals
, from directions
,
, where
. The array is composed of uniform rectangular arrays (URAs) with
omnidirectional sensors spaced by
in the x-axis direction and
in the y-axis direction.
is the wavelength of the incident waves, and
=
=
. The additive noises of the URAs are circular Gaussian with zero mean and variance
, which are uncorrelated with the impinging signals. The received data vectors of the URAs at sample
t can be expressed as:
where
,
, ... ,
.
is the steering matrix with each column denoted by
,
, with
,
.
,
, is termed the steering element matrix given by
with
.
,
, ... , and
indicate the circular Gaussian noise vectors of the URAs, respectively.
is the mixed signal vector, which can be denoted as
, and we can see that there are
noncircular and
circular signals in it.
In practice, non-circularity and circularity are important properties of random variables; their concept directly comes from the geometrical interpretation of complex random variable. The signal would be called the circular source if its statistical characteristic has the rotational invariance characteristic, otherwise, it would be called the noncircular source. The work in [
31] introduces the circularity and noncircularity in detail. Based on this, we only consider the rotational invariance characteristic of the first- and second-order statistical properties of the sources. For a complex random signal
,
, we defined
,
and
as the mean, the covariance and the elliptic covariance of the signal
, respectively. If the source’s first- and second-order statistical properties are rotational invariant for an arbitrary phase
as follows:
The signal will be called the circular source. Conversely, the signal will be noncircular if the first- and second-order statistical properties are not rotational invariant.
Beyond that, reference [
32] proposes a model to describe signal sources with arbitrary second-order non-circularity. The source
is defined as follows:
where
is the rotation phase,
denotes the non-circularity coefficient and
and
represent the in-phase and quadrature components of the complex signal
, respectively. Therefore,
will represent a circular source if
, where the rotation phase
is irrelevant and undetermined. If
,
will represent a strictly non-circular signal.
Based on the above research, we defined the strictly non-circular signal as
, where
is a real signal and
is an arbitrary phase shift for the signal. Due to the phase information of circular source being irrelevant, it can be represented as
. Therefore, the mixed source signal vector can be modeled as
.
can be expressed as:
where
,
, and
is denoted as:
A new data vector
is defined by concatenating the received data vectors
,
, ... , and
as follows:
where
is the extend steering vector, and:
In order to simplify the notation, the pair of angles
and
t is omitted. In Equation (
11),
is a
matrix of noncircular signals and
is a
matrix of circular signals.
As a classical procedure for existing noncircular DOA estimation algorithms [
27,
33,
34], we can construct a new augmented data matrix
by combining the vector
and its conjugate counterpart
as follows:
The procedure can extend the array virtually and enlarge the aperture of the array antenna, and the estimating precision of DOA can be improved by utilizing the noncircularity of signals. In Equation (
14),
is a
matrix, which contains the new steering vectors of the impinging sources.
is a
matrix of signals.
where
and
are the new steering vectors of non-circular signals and circular signals, respectively.
, which is a
vector,
, which is a
matrix,
which is a
matrix of signals, and:
which is a
vector of noise.
The covariance matrix of
is calculated by:
where
is the covariance matrix of
.
is a full-rank matrix, since the incident signals are uncorrelated with each other. Then, the eigenvalue decomposition of
is:
where the
matrix
and the
matrix
are the signal subspace and noise subspace, respectively. The
matrix
and the
matrix
are diagonal matrices, where
are the eigenvalues of
.
Remark 1. In practice, the available observed data are finite. Thus, can be approximated by:where L is the number of available data snapshots. Then, the eigenvalue decomposition of is:therefore, the noise subspace and signal subspace can be approximated by and , respectively. 3. The Proposed Algorithm
In this section, we propose a 2D DOA estimation algorithm to solve the problem of estimating and distinguishing the mixed signals that are circular and non-circular in detail. Firstly, the method for estimating the mixed sources that are circular and noncircular is proposed; secondly, the algorithm, which only detects the circular signals, is proposed; and finally, we study how to distinguish these two kinds of sources.
Because both and have the same signal subspace, orthogonal to the noise subspace spanned by the matrix , we devise estimators to obtain the 2D DOAs of noncircular and circular signals using the rank-reduction-based Root-MUSIC method.
3.1. 2D DOA Estimation for Non-Circular Sources
Because the noise subspace
is orthogonal to
(the steering vectors of non-circular signals), the following equation can be obtained directly:
Then, together with Equations (16) and (24), we can get the following equation:
Defining a vector
, which is only related to
l, where
. Therefore, we can obtain the formula
and
, then define a
matrix
(
l), which is only related to
l,
and define a
matrix:
Note that if
and
is not the true angle of the non-circular signal,
is of full rank because in this case, the column rank of
is not less than
. Then, Equation (
25) holds true only when
equals the true angle of the signal (
drops rank). Since the covariance matrix of
is obtained from a finite number of samples, the reduction of the rank of
can roughly be replaced by the minimum of the determinant of
. Therefore, we get the estimator of
about non-circular signals as follows:
Notice that
is a
order polynomial, showing that there are
pairs of conjugated roots. The estimates
signal DOAs of
can be obtained by finding the closest roots of the unit circle, which are given by:
where
are the roots closest to the unit circle. Then, we take the estimated
of non-circular source into Equation (
25) to get the estimator of
:
where:
; it means that
and:
To achieve the estimate of
, we need to solve the roots of
. Due to
being a
-order polynomial, it means there are
pairs of conjugated roots. The estimate of
can be obtained by finding the closest roots of the unit circle; in this way, we can automatically pair the closest roots
corresponding to
, respectively, and the DOAs of
are given by:
where
are the roots closest to the unit circle, respectively.
3.2. 2D DOA Estimation for Circular Sources
Because the noise subspace
is also orthogonal to
(the steering vectors of circular signals), we can get the equation as follows:
from Equation (
34), we can get:
Partitioning the noise subspace
into
, where
and
are two submatrices of the same size
, Equations (35) and (36) can be changed to:
As proven in [
27], Equations (37) and (38) are equivalent to each other; therefore, the estimator over
, which corresponds to circular signals, can obtained based on Equation (
37). Since:
Defining a vector
only related to
, where
. Therefore, we can get formula
, then defining a
matrix
(
) only related to
,
and:
Note that if
and when
is not the true angle of circular signal,
is of full rank because in this case, the column rank of
is not less than
N. Then, Equation (
37) holds true only when
equals the true angle of circular signal (
drops rank). Since the covariance matrix of
is obtained from a finite number of samples, the reduction of the rank of
can roughly be replaced by the minimum of the determinant of
. Therefore, we get the estimator of
about circular signals as follows:
Notice that
is a
order polynomial, which means that there are
pairs of conjugated roots, and the estimated
signal DOAs of
can be obtained by finding the closest roots of the unit circle, which are given by:
where
are the roots closest to the unit circle. Then, we take the estimated
of circular signals into Equation (
37) to get the estimator of
:
where:
; this means that
and:
To obtain the estimate of
, we need to solve the roots of
. According to
being a
-order polynomial, this means there are
pairs of conjugated roots. The estimate of
can be obtained by finding the closest roots of the unit circle. Therefore, we can automatically pair the closest roots
corresponding to
, respectively, and the DOAs of
are given by:
where
are the roots closest to the unit circle, respectively.
3.3. Identification of Circular and Noncircular Signals
In order to distinguish the 2D DOAs of circular and noncircular signals from the mixed signals, Equation (
34) can be changed into:
due to
, we can utilize method of noncircular to establish the estimator over
and
of circular signals as follows:
and:
This means the noncircular method can also be applied to solve circular signals. Therefore, we can achieve the 2D DOAs of both non-circular and circular sources from Equations (28)–(30) and (33) and only obtain the 2D DOAs of circular sources from Equations (42)–(44) and (47). Then, the purpose of distinguishing the circular and noncircular signals from the mixtures can be accomplished.
The proposed algorithm can be outlined as:
- Step 1:
Construct the new data vector and calculate its approximate covariance from Equations (14) and (22).
- Step 2:
Perform EVDto
and achieve the noise subspace
from Equation (
23).
- Step 3:
Estimate the K 2D DOAs of the mixed signals from Equations (28)–(30) and (33).
- Step 4:
Obtain by partitioning the matrix .
- Step 5:
Estimate the 2D DOAs of the circular signals from Equations (42)–(44) and (47).
- Step 6:
Compare the estimate achieved by Step 3 and Step 5 to distinguish the 2D DOAs of the noncircular signals and the 2D DOAs of the circular ones.
Remark 2. To calculate , a computational complexity of is needed. The computational complexity of eigendecomposition operation is . The proposed method employs four 1D estimators of polynomial-rooting; therefore, the complexity for the proposed method is . While the algorithm in [27] employs several 1D spatial spectrum search procedures to obtain the 2D DOAs of signals, by defining the scanning interval of with an interval of and with an interval of , respectively, the complexity for the algorithm in [27] is . The algorithm in [16] employs two direct 2D spatial spectrum search procedures, whose complexity for the method is . Therefore, the computational complexity of the proposed method has been reduced greatly.
5. Simulation Results
In this section, simulation results are provided to demonstrate the performance of the proposed algorithm. For Simulations (1)–(3), the URAs have
rows and
columns; both
and
are half wavelength. For all simulations, we utilize BPSK and QPSK to represent the strictly non-circular signal and the circular signal, respectively, and the sources can be realized base on (7). For instance, if we take
and
, the QPSK signal
can be obtained. If we take
and
, the BPSK signal
can be acquired. The power of additive white Gaussian noise is
, and the signal-to-noise (
SNR) is defined as
. We use the root mean square error (RMSE) to evaluate the estimation performance, which is defined as:
where
is the number of Monte Carlo simulations,
K is the number of signals,
is the estimated
or
in the
m-th Monte Carlo simulation and
is the true value for either
or
of the
k-th signal.
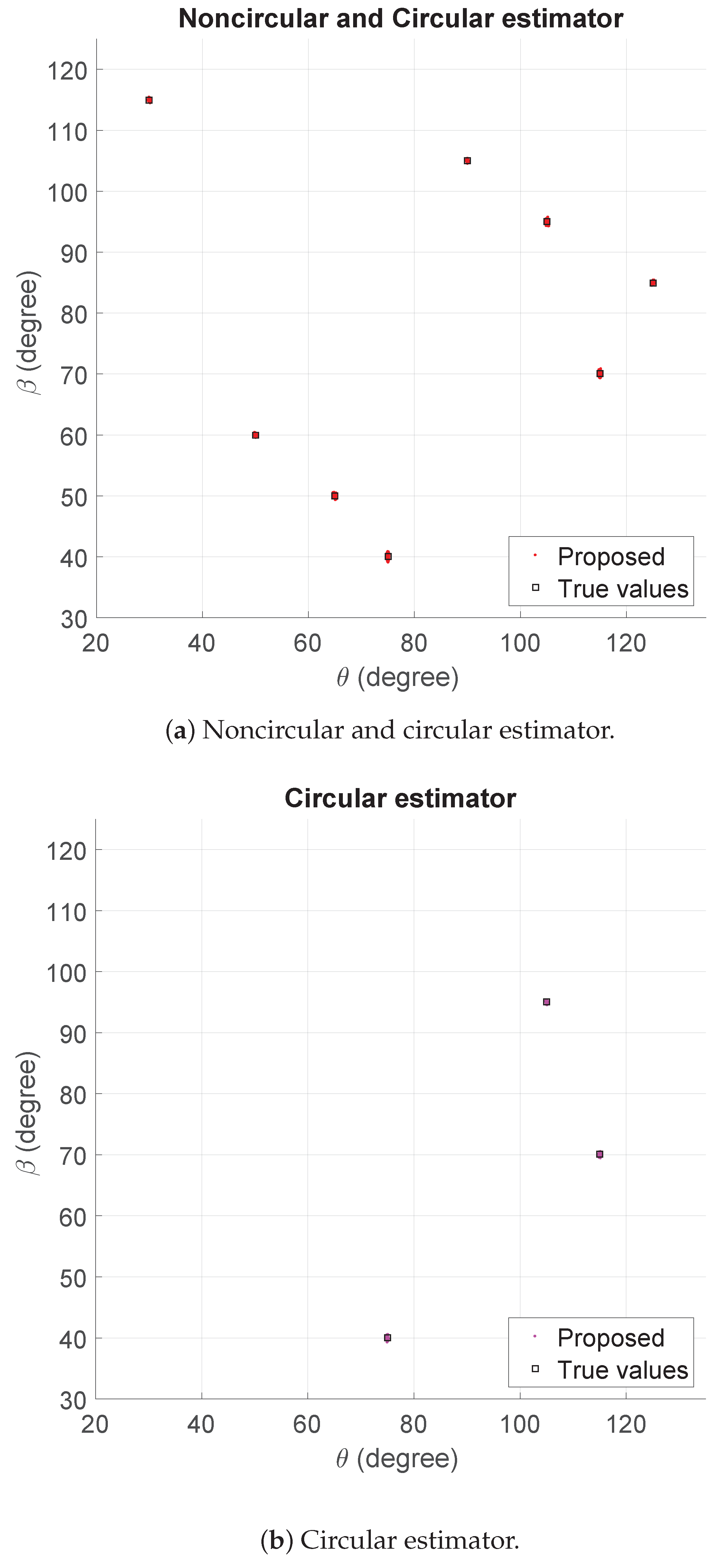
5.1. The 2D DOAs’ Scattergram of the Estimators
To demonstrate the performance of the proposed algorithm, we examine the scattergram of 2D
and
of the method. Five BPSK signals and three QPSK signals are considered here. The BPSK signals are from the directions
,
,
,
and
and the QPSK signals from
,
and
. The SNR is 10 dB, and the number of snapshots is 500.
Figure 2a,b indicates that the method can estimate and distinguish the 2D DOAs that are strictly noncircular and circular successfully.
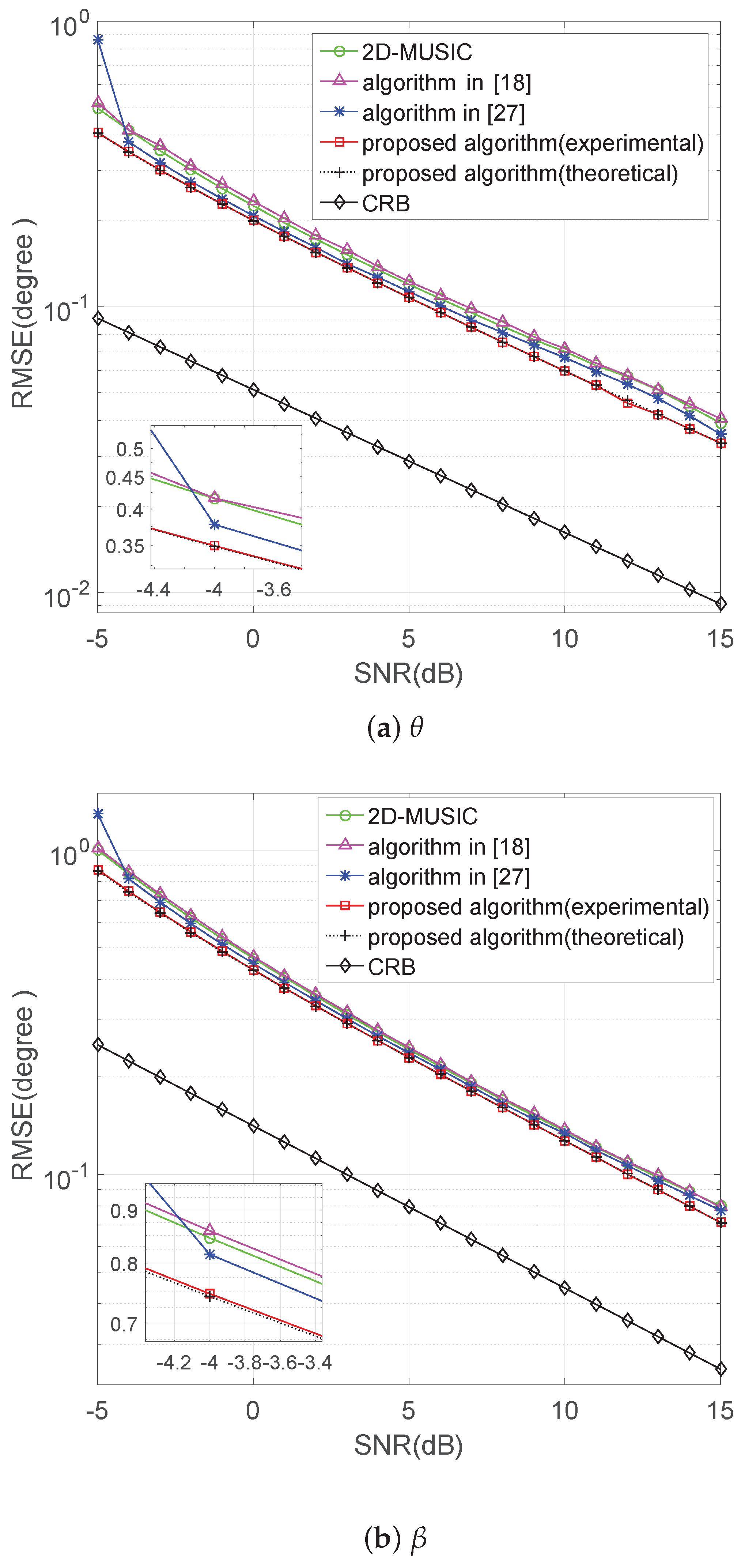
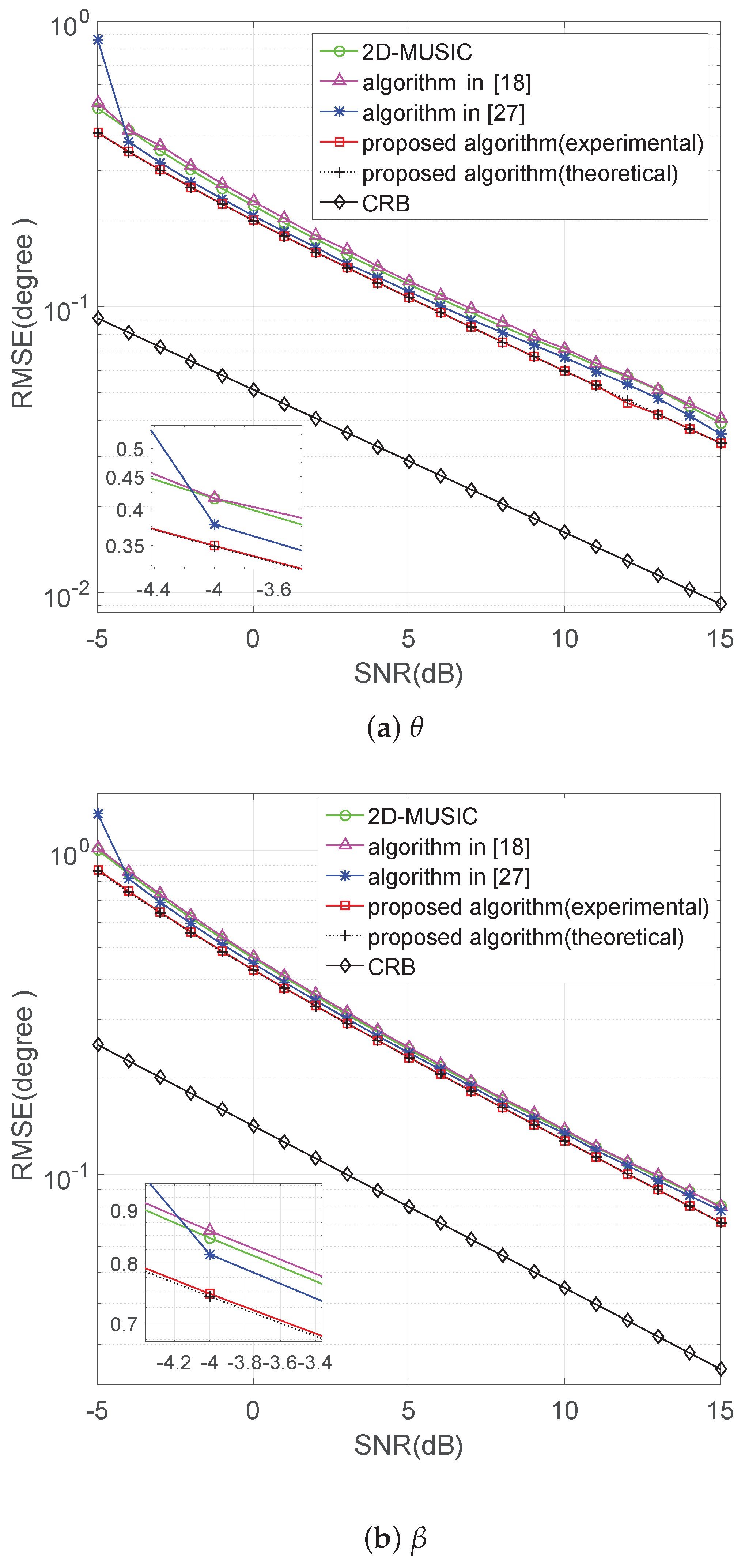
5.2. Performance versus SNR
In this part, the performance of the proposed algorithm is studied with a varying SNR from −5 dB–15 dB. The number of snapshots is 500, and the number of Monte Carlo simulations is 500. Five BPSK signals and one QPSK signal are considered. The BPSK signals are from the directions , , , and and the QPSK signals from .
The proposed algorithm in theoretical analysis and experimental results, the algorithm of 2D-MUSIC, the algorithm in [
18], the algorithm in [
27] and the deterministic CRB (Cramer–Rao bound) in [
37], are compared in terms of RMSE.
Figure 3a,b shows that the proposed method is steadily better than the other three algorithms, and the experimental values of the proposed algorithm overlap together with the theoretical error ones.
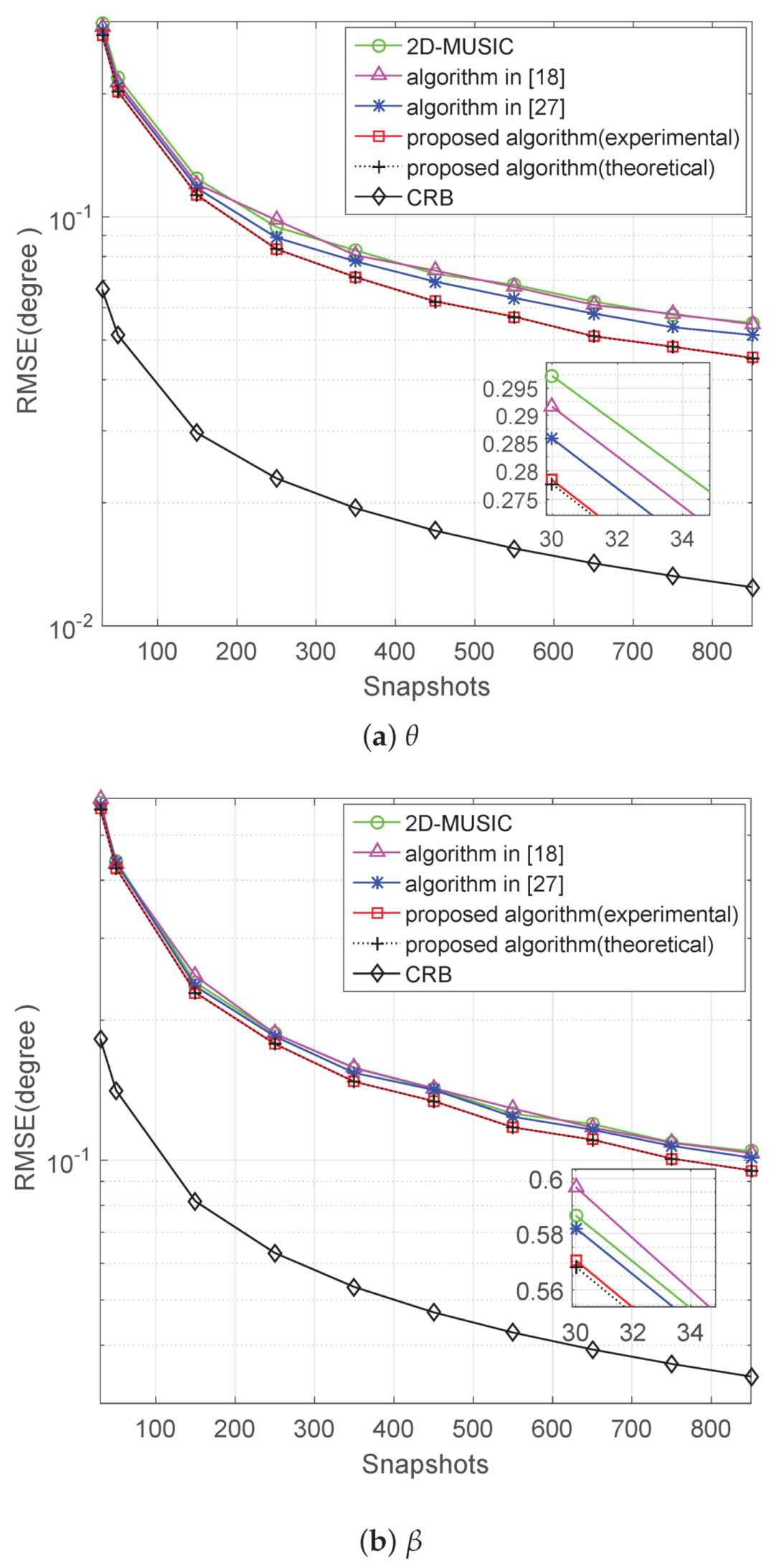
5.3. Performance versus Snapshots
We study the performance of the proposed algorithm with a varying snapshot number from 30–850. The SNR is fixed at 10 dB; the number of Monte Carlo simulations and incident signals are the same as in the second experiment. The RMSE results for angle estimation are shown in
Figure 4a,b. The proposed method is steadily better than the other three algorithms, and the experimental values of the proposed algorithm overlap together with the theoretical error ones.
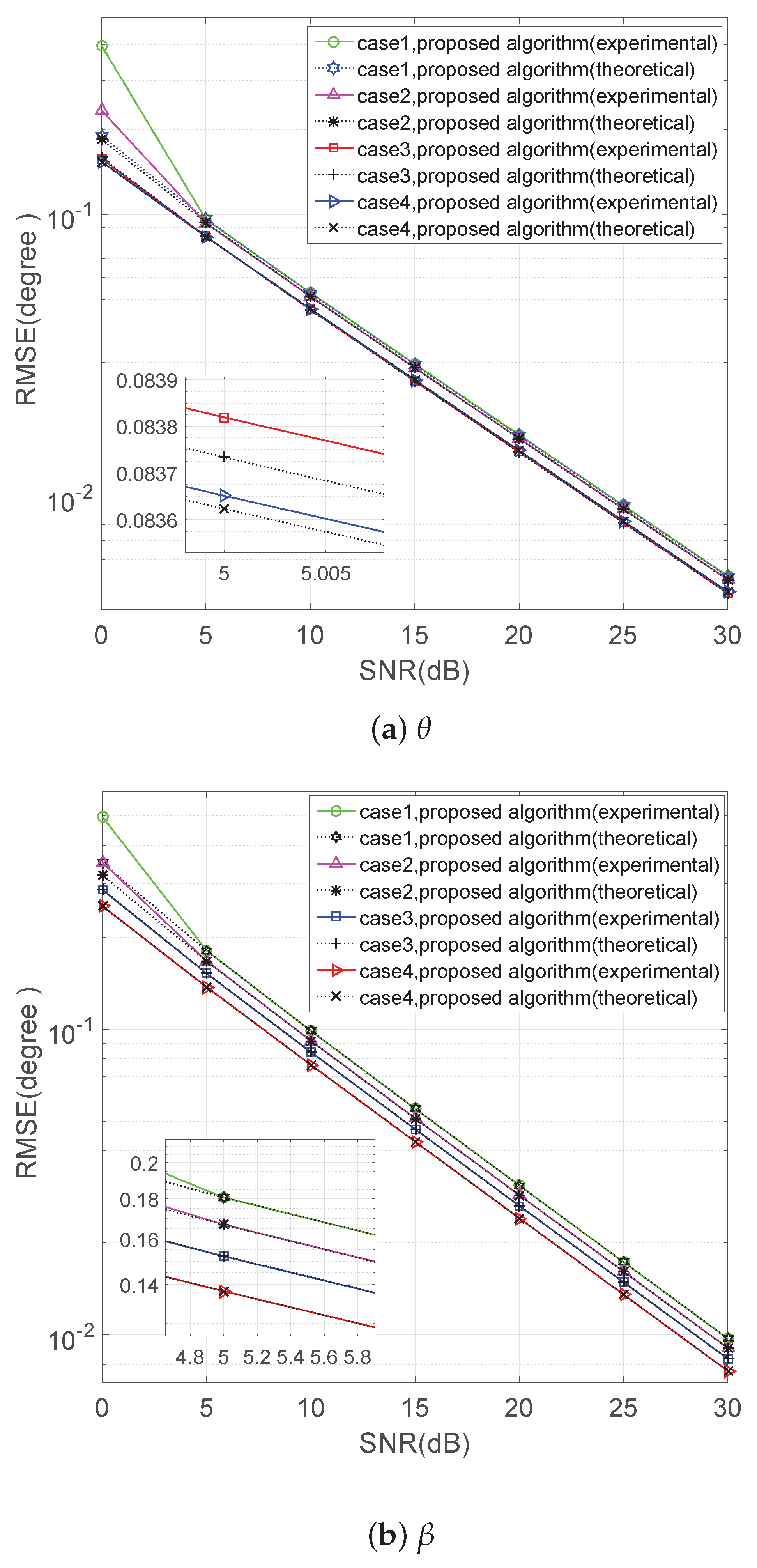
5.4. Performance versus the Number of Noncircular Mixed Signals
Finally, we consider the performance of the number of noncircular signals based on the proposed algorithm. The URAs have
rows and
columns; the SNRs vary form 0 dB–30 dB; the number of snapshots is 1200; and the number of Monte Carlo simulations is 1000. There are four uncorrelated signals from directions
,
,
and
, and the total number of sources remains unchanged. We consider cases about one, two, three and four BPSK signals, respectively. The results are shown in
Figure 5a,b.
We can see that the RMSE of the experimental values of the proposed algorithm will overlap together with the theoretical error ones in a relatively high SNR, and the 2D DOA estimation performance of the proposed method improves from Case 1 to Case 4 because the dimension of the noise subspace has been extended by the increasing number of BPSK signals.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}