
High Resolution Full-Aperture ISAR Processing through Modified Doppler History Based Motion Compensation


Abstract
:1. Introduction
2. ISAR to SAR Approach
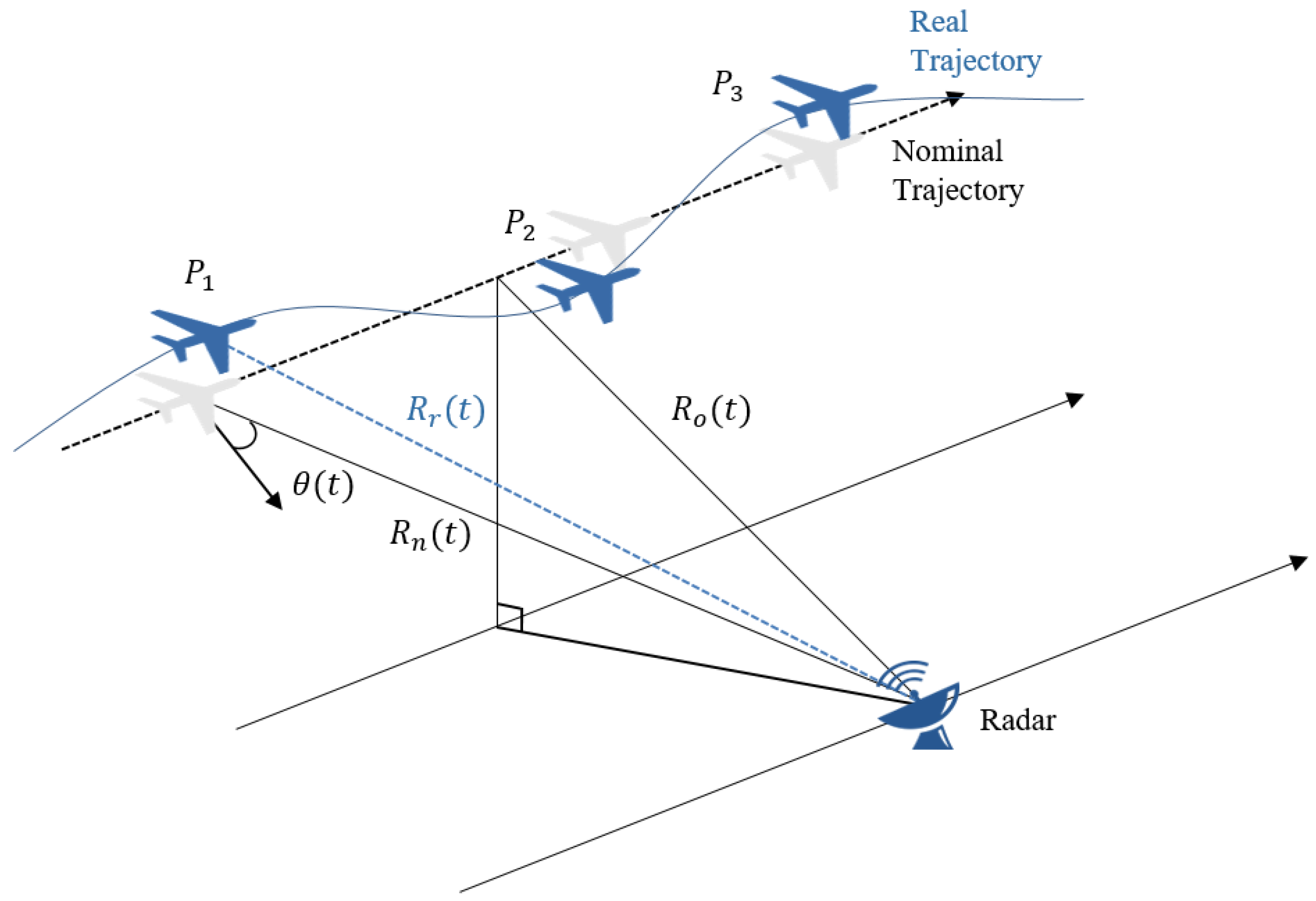
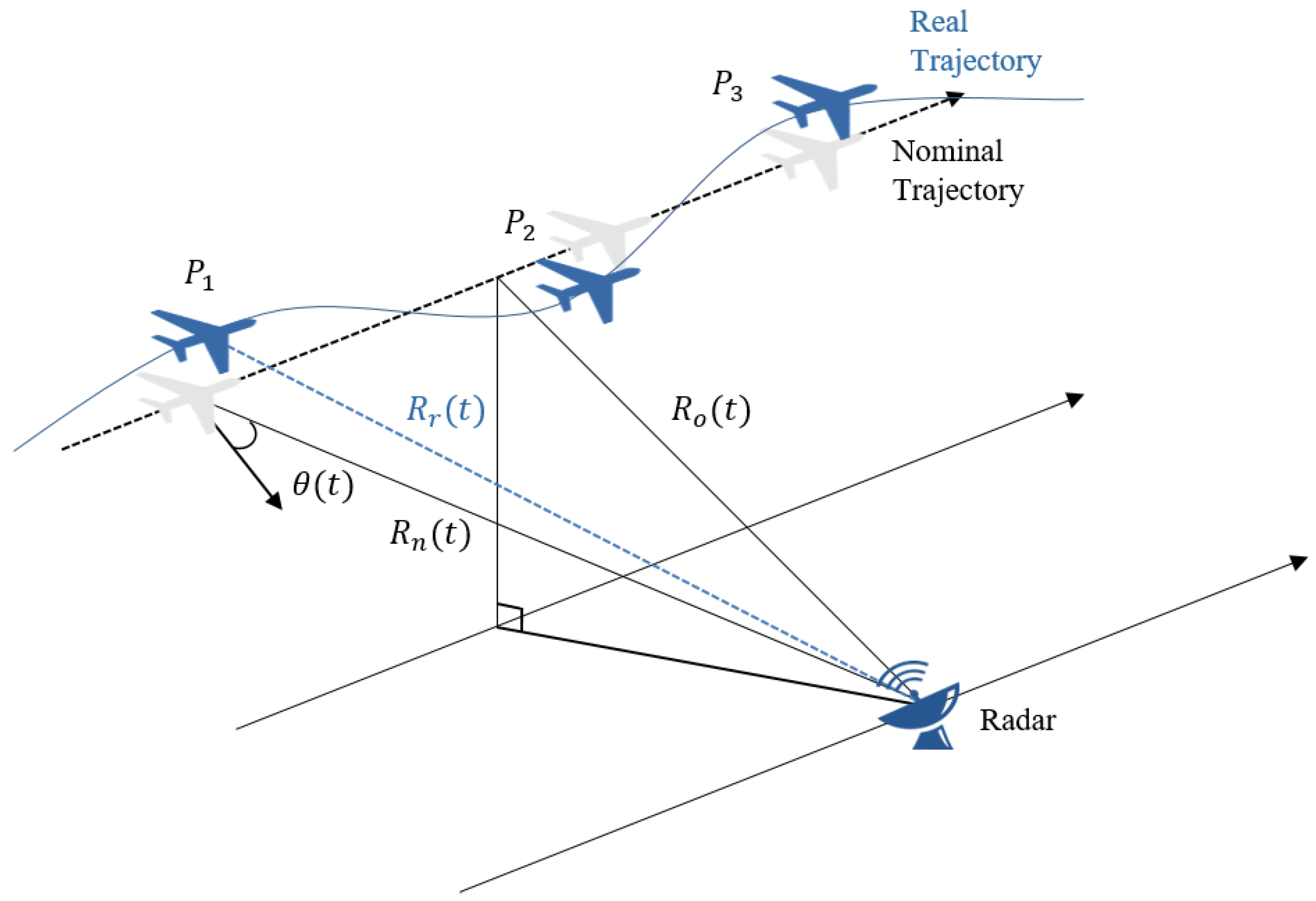
2.1. Motion Errors in ISAR Doppler History
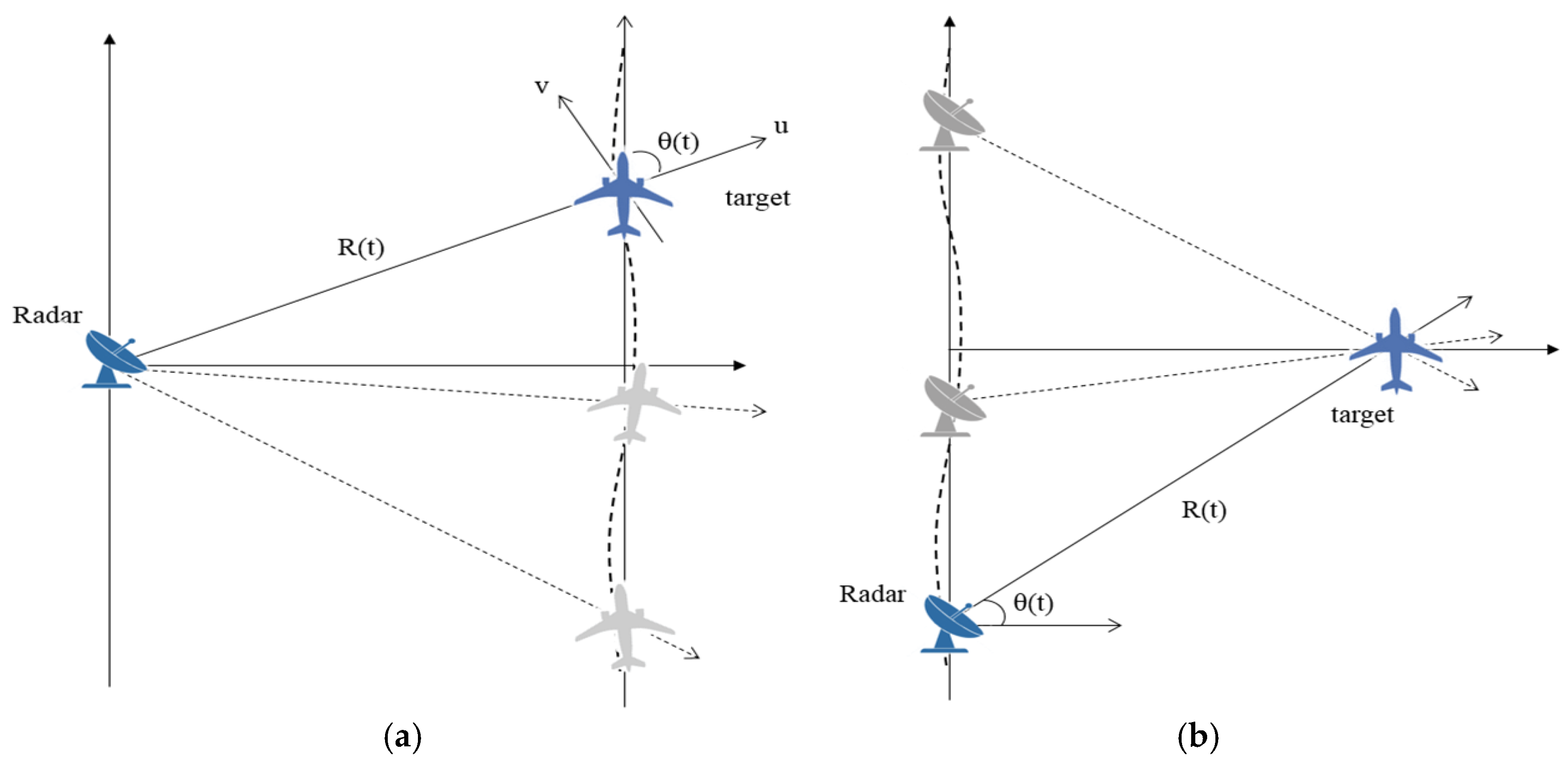
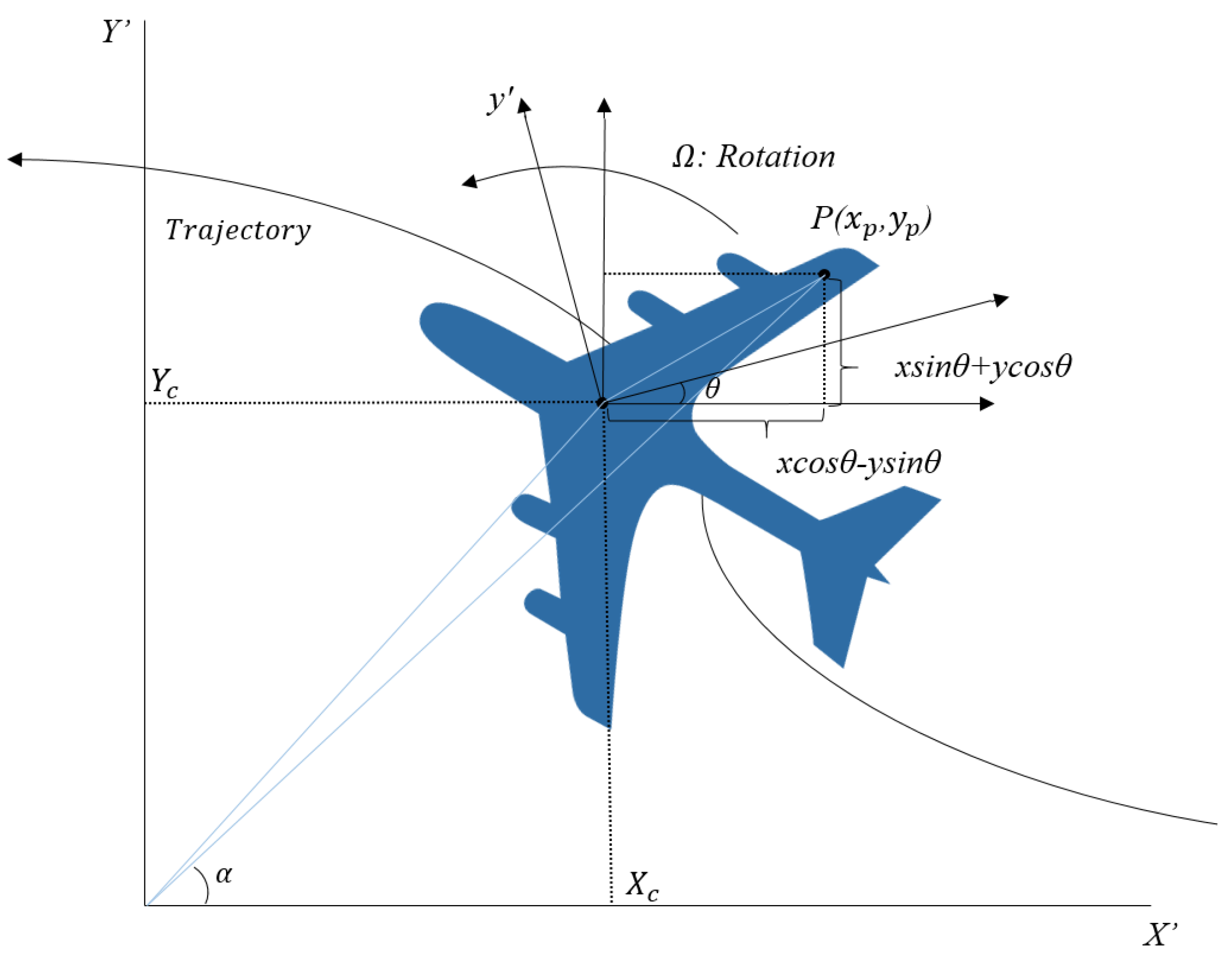
2.2. Comparison ISAR with SAR Geometry
3. ISAR-to-SAR Processing with Motion Compensation
3.1. Motion Compensation Processing
3.1.1. Range Tracking
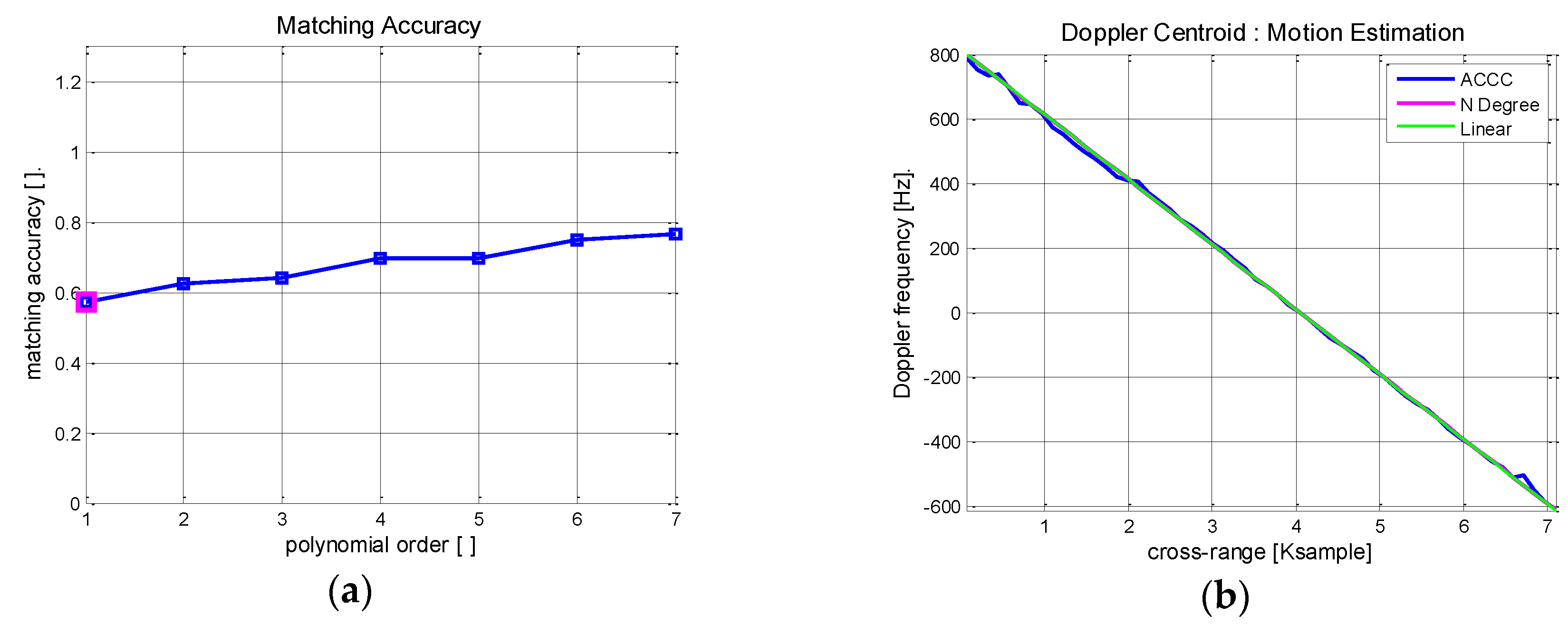
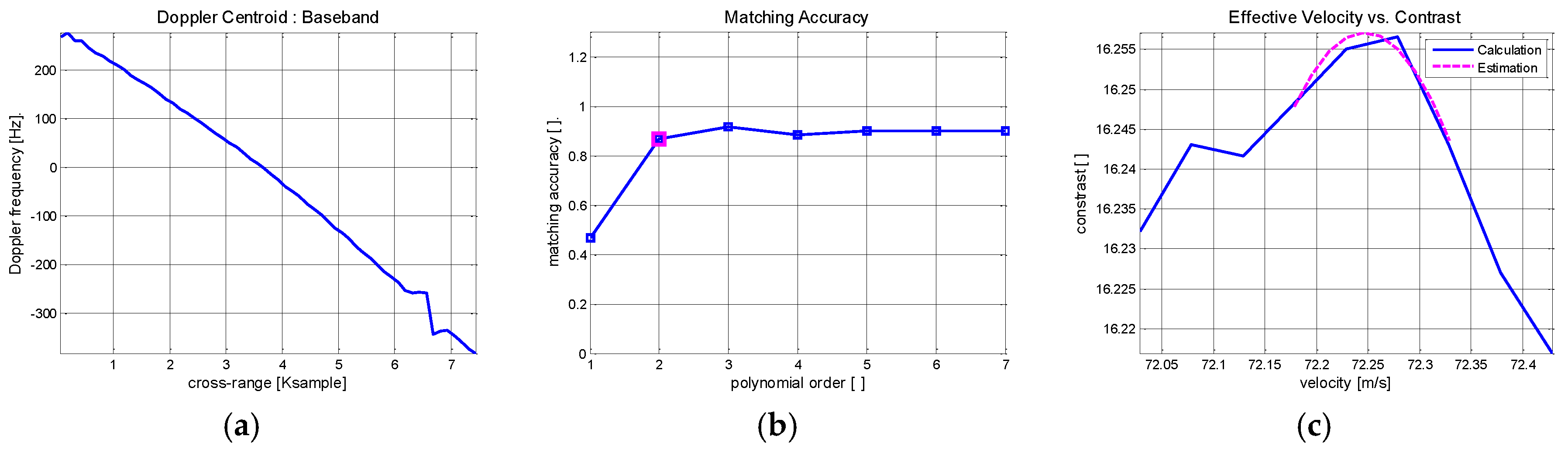
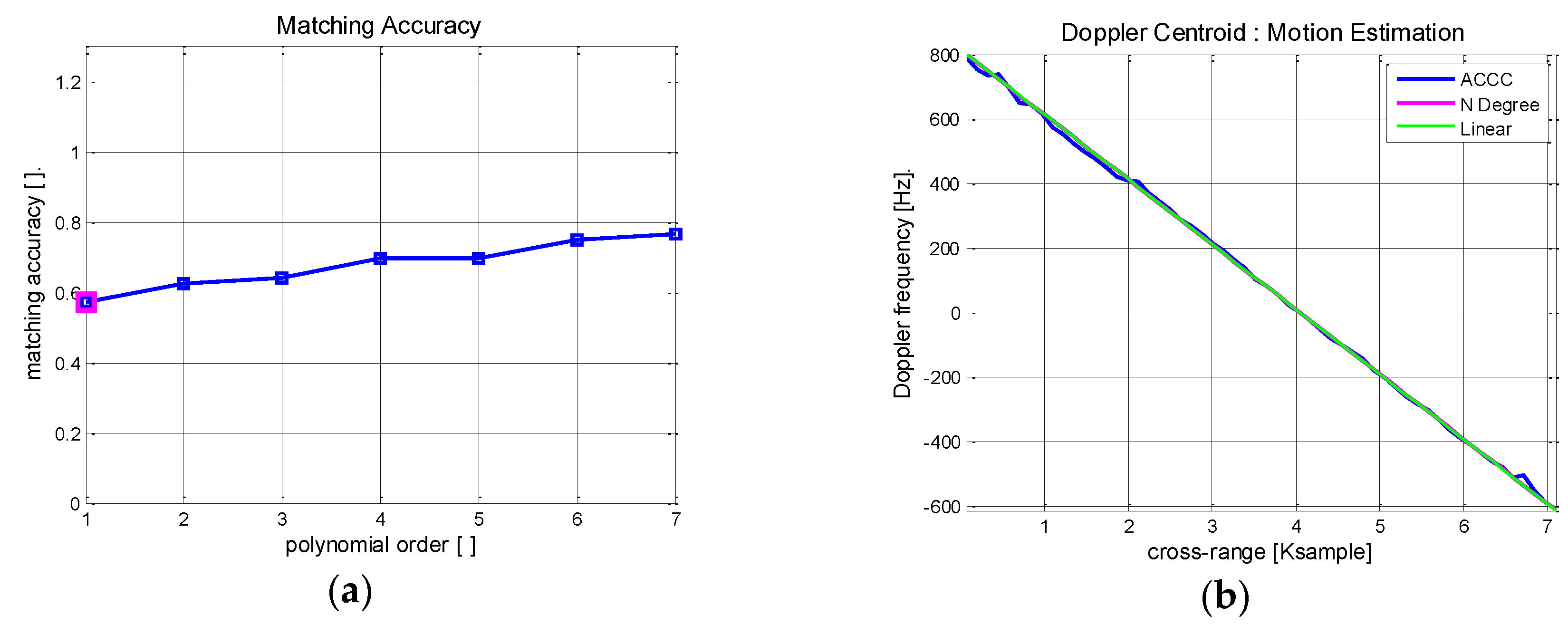
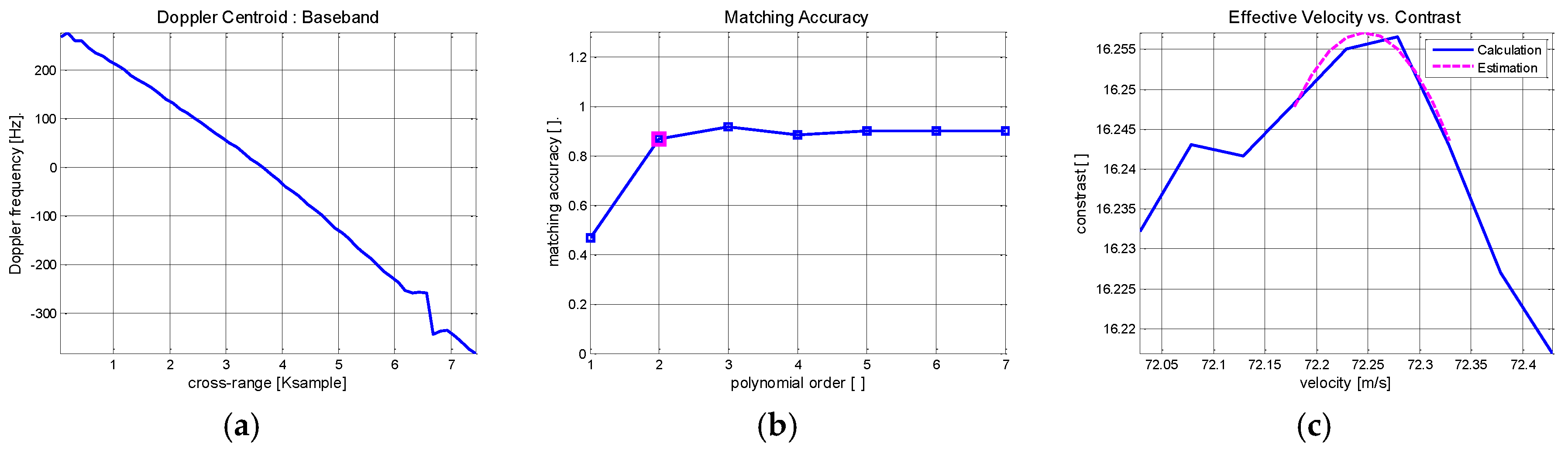
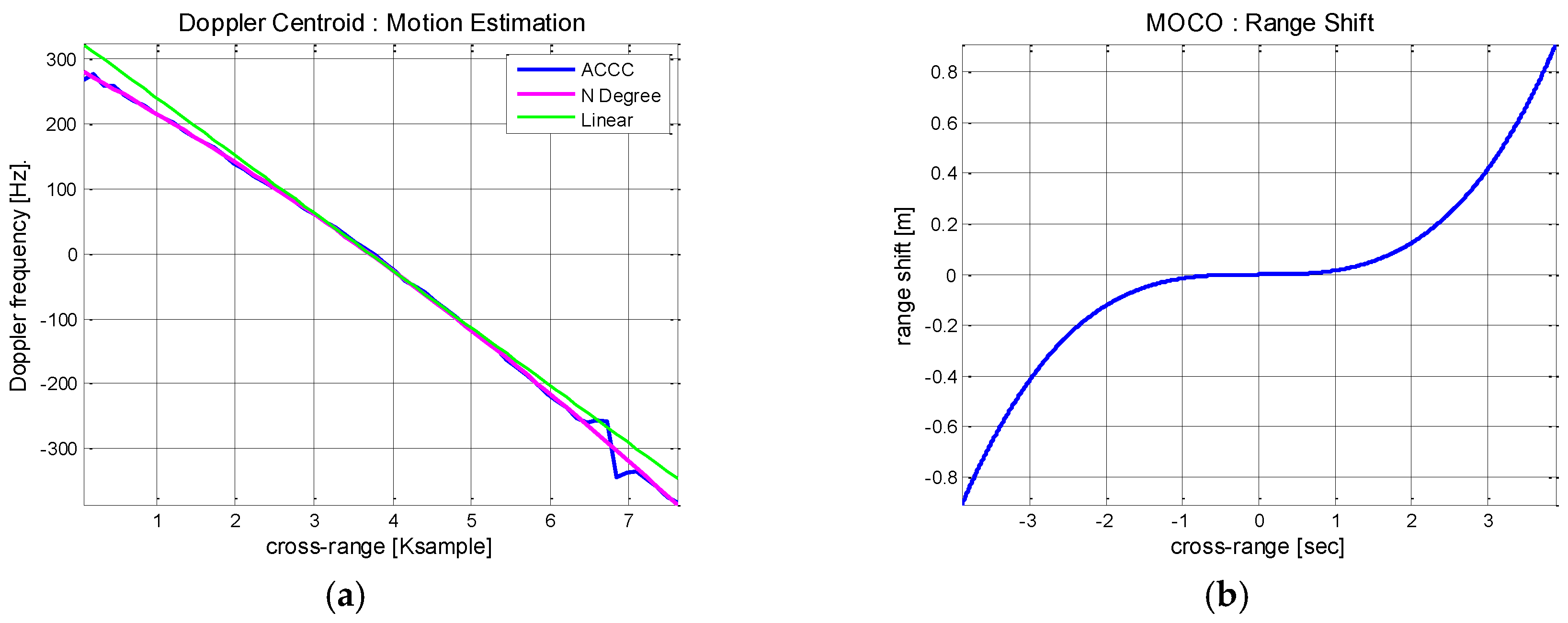
3.1.2. Doppler Centroid Estimation
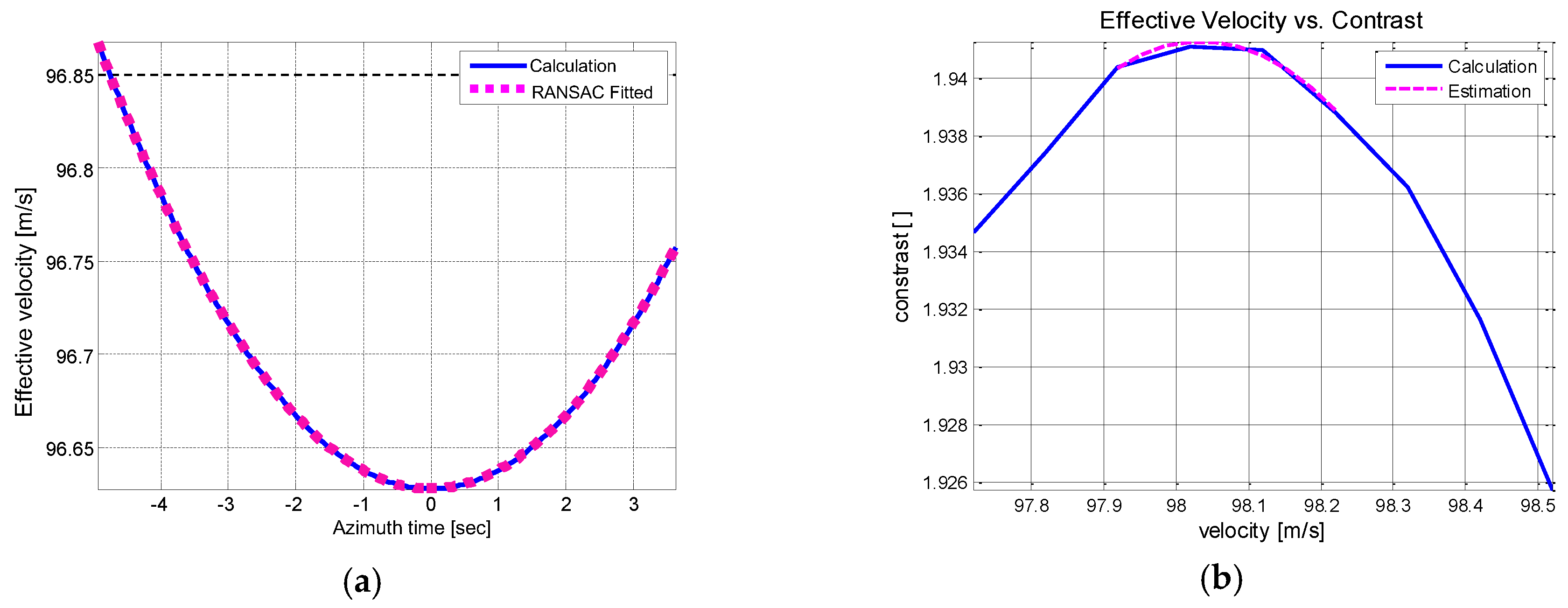
3.1.3. Effective Velocity Estimation
3.1.4. Motion Compensation Based on Doppler History
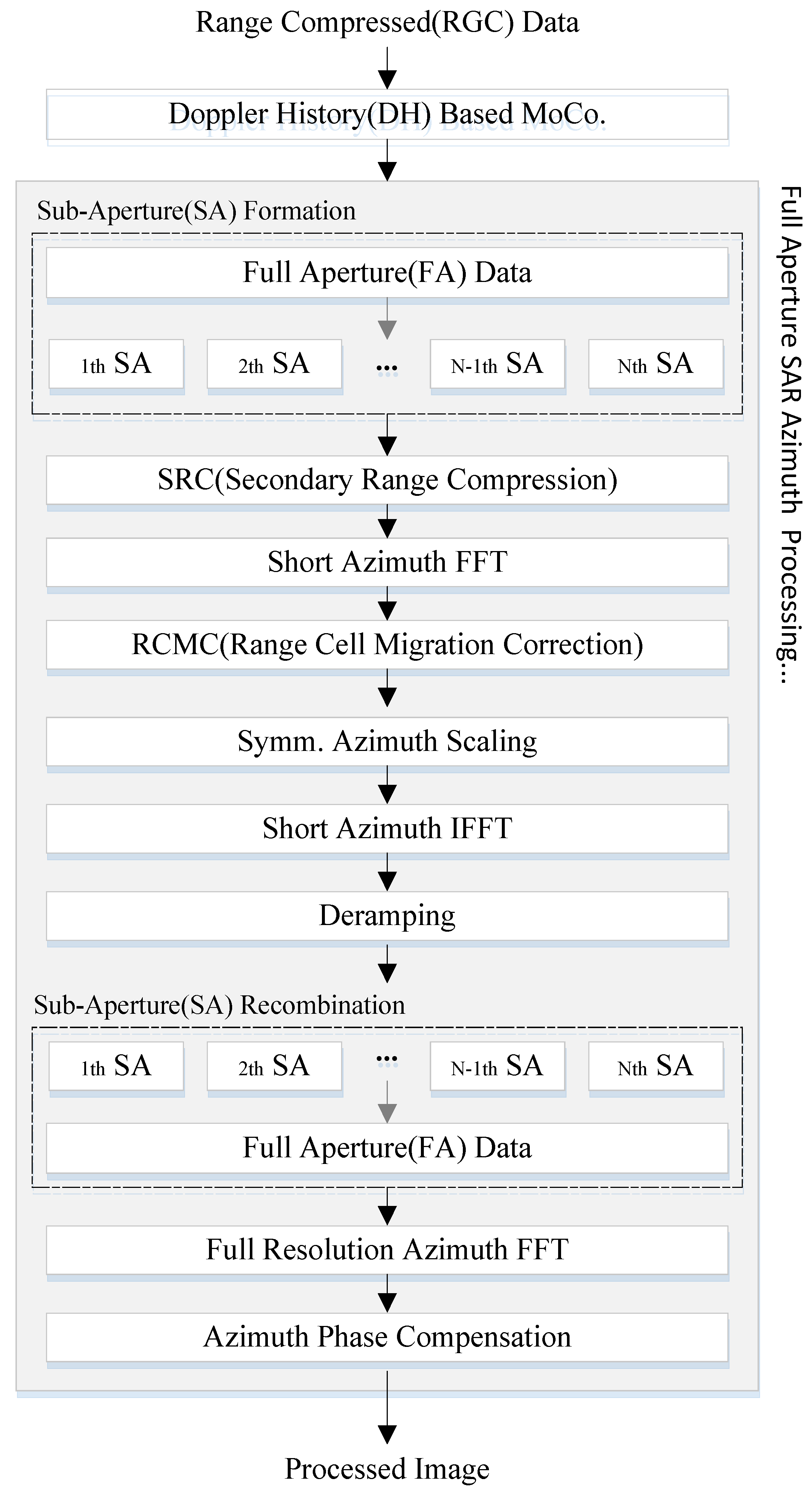
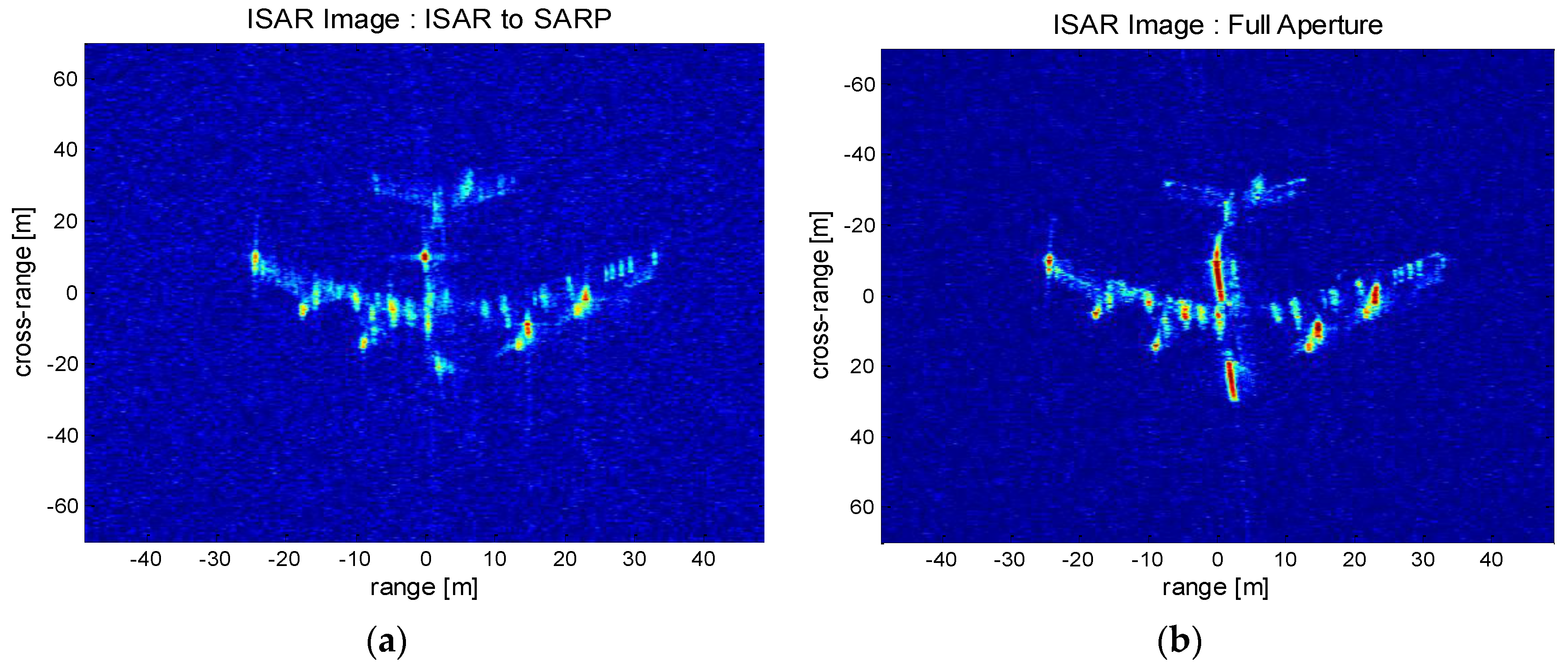
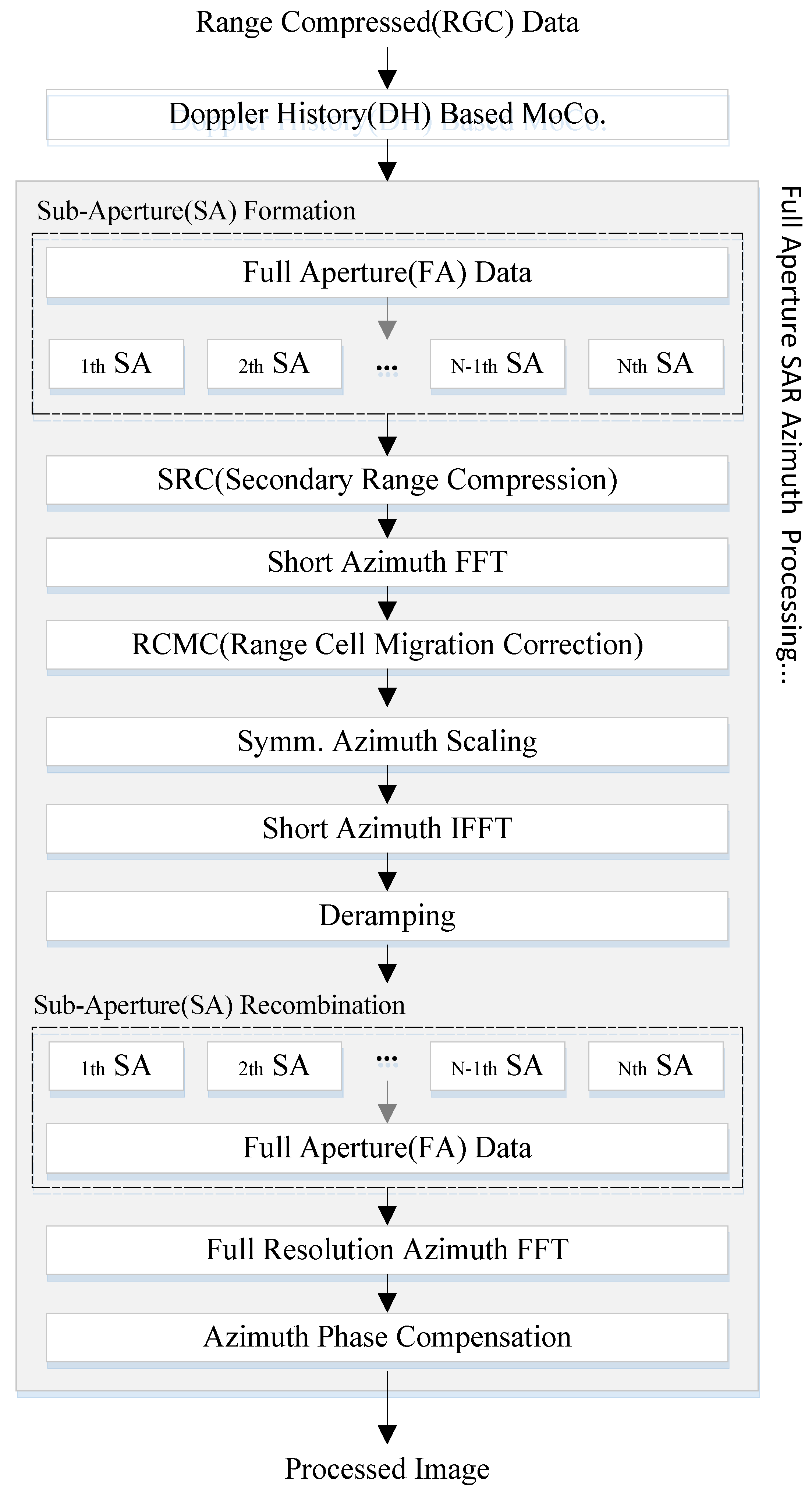
3.2. ISAR to SAR Full Aperture Processing
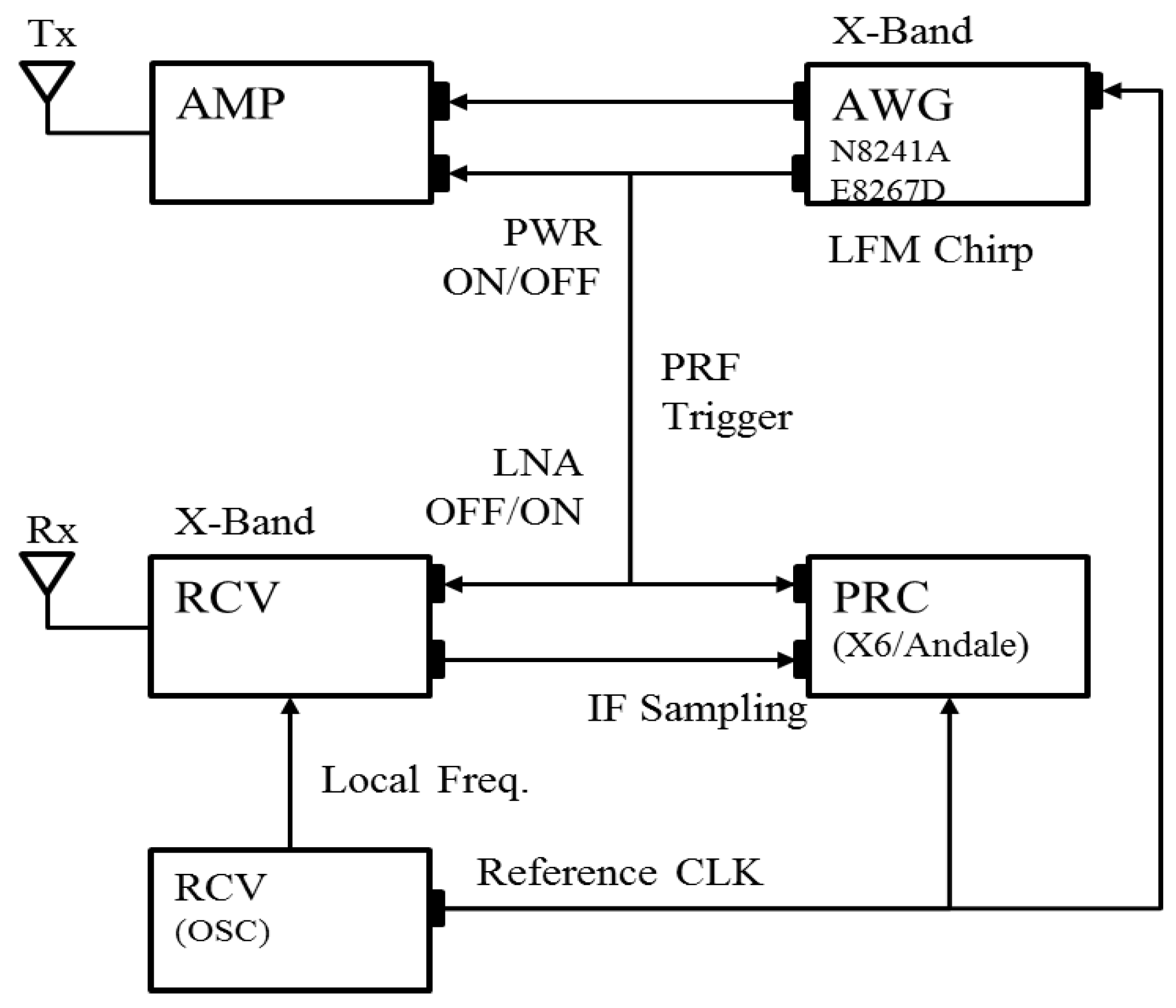
4. System Implementation and Data Acquisition
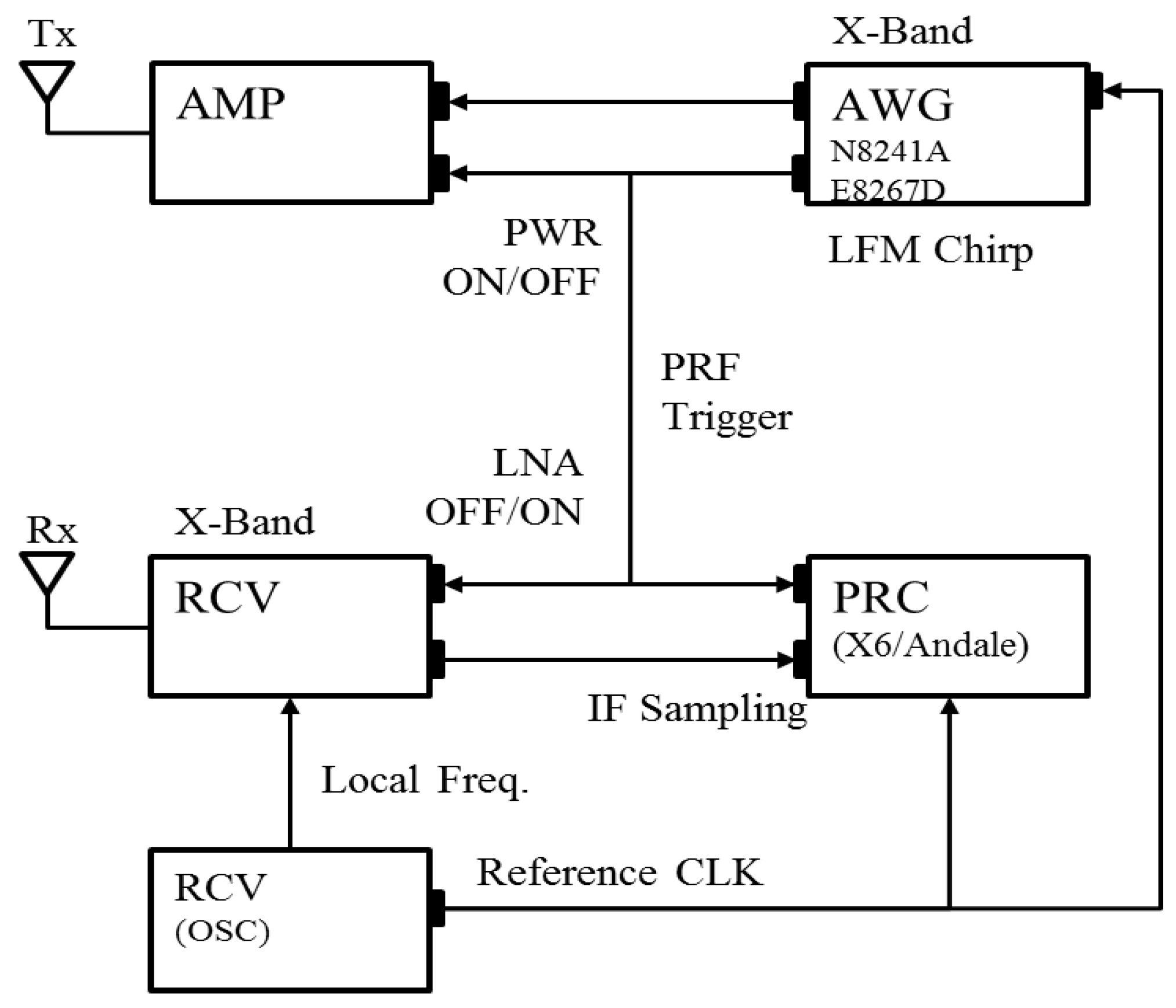
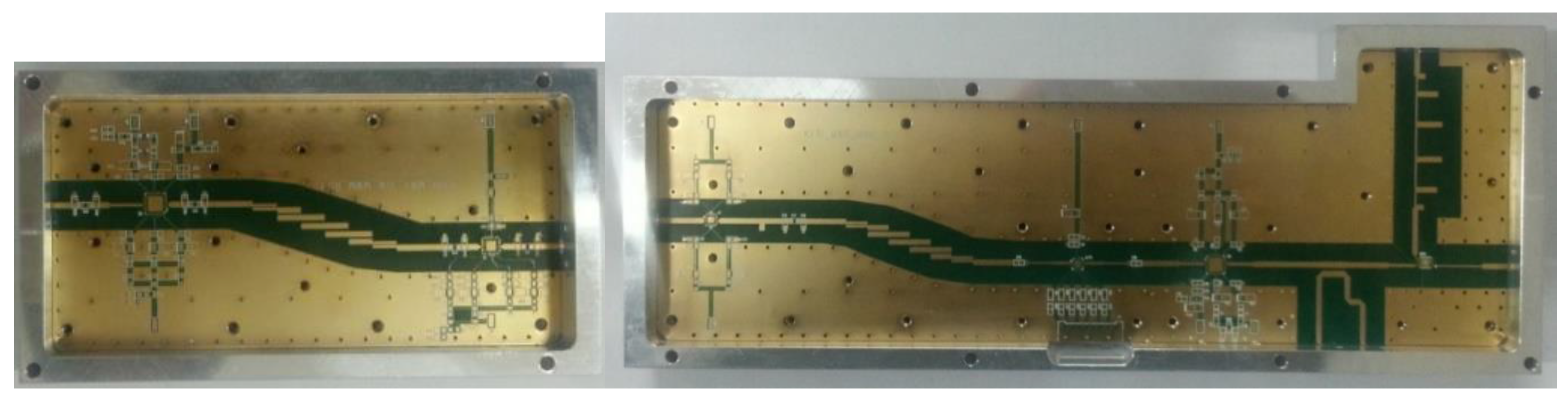
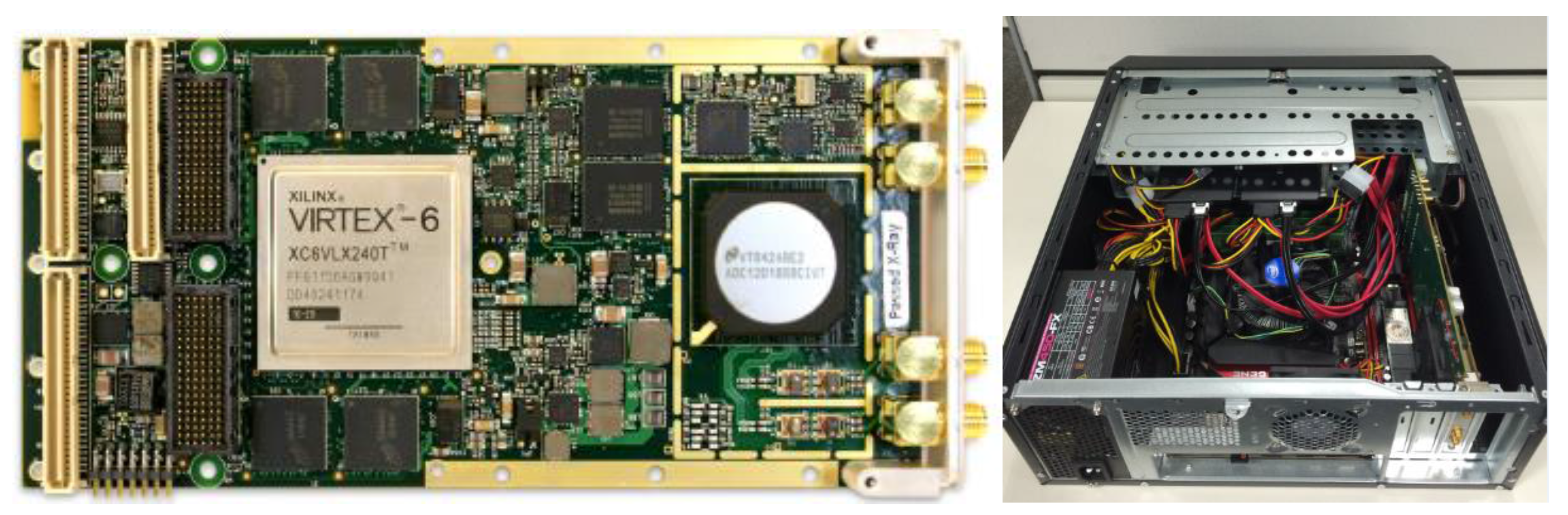
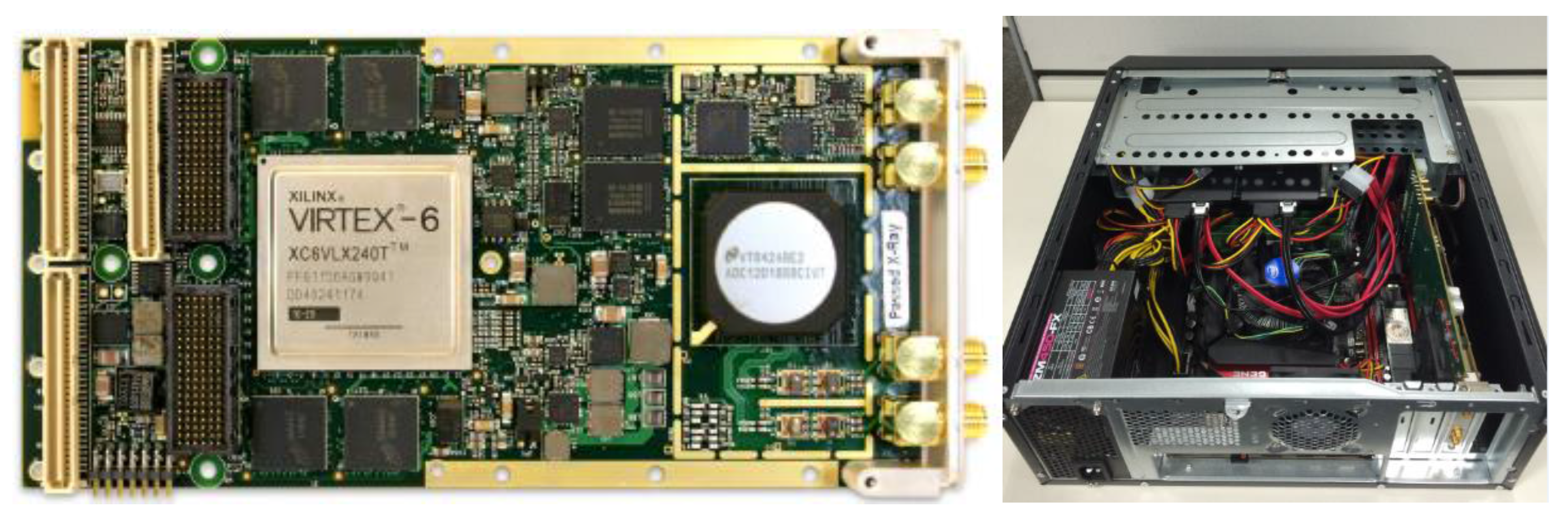
4.1. System Implementation
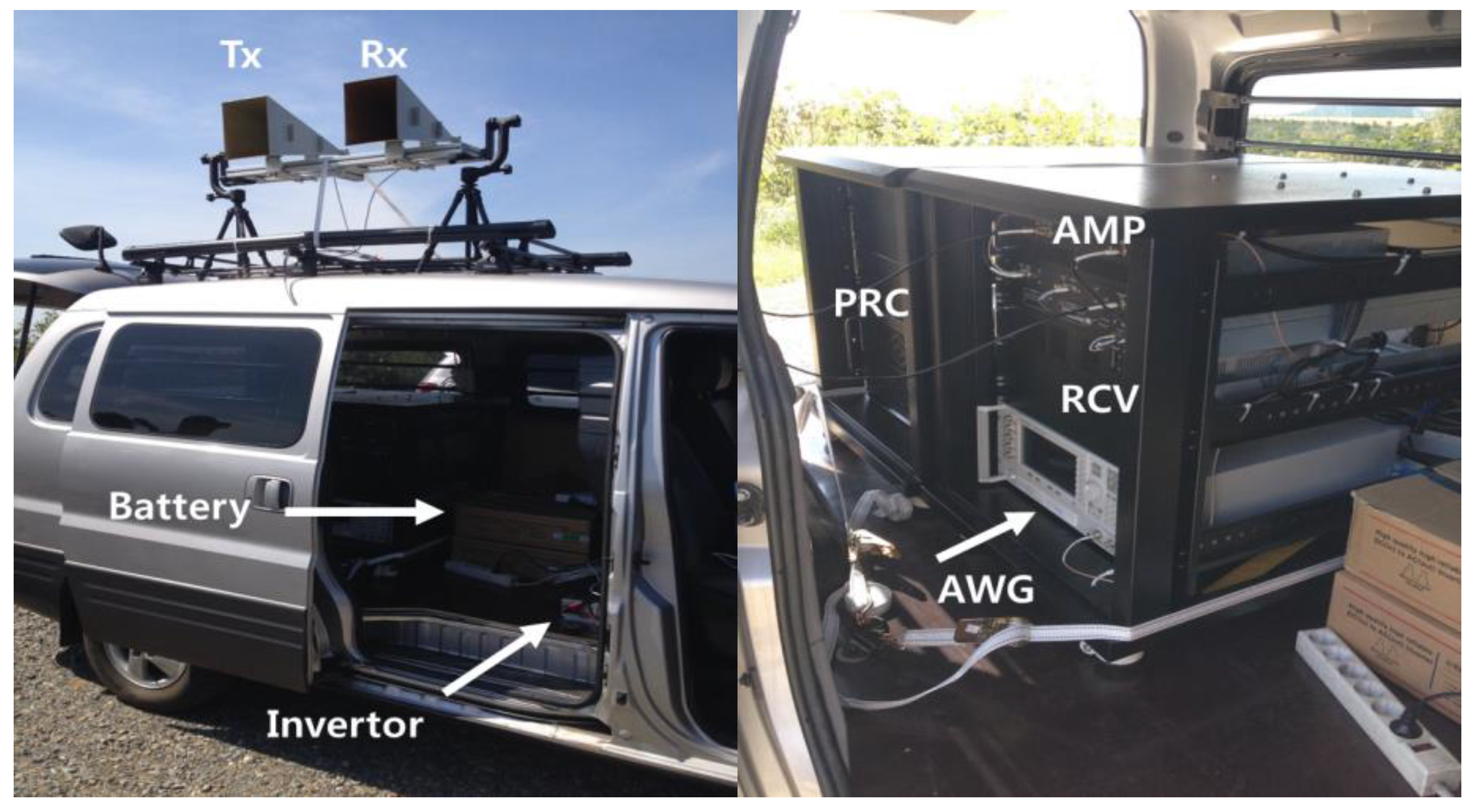
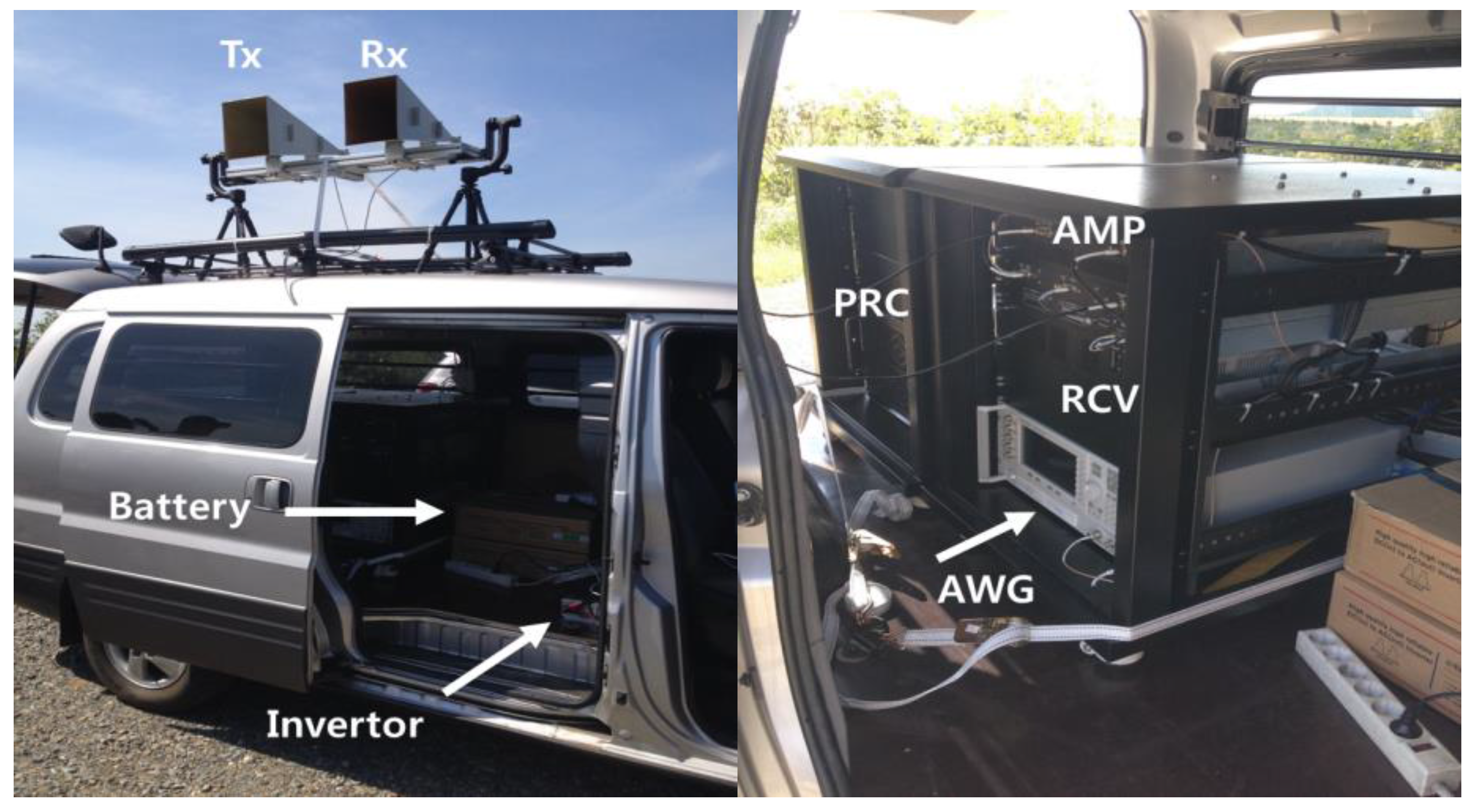
4.2. Experimental Field Work and Data Acquisition
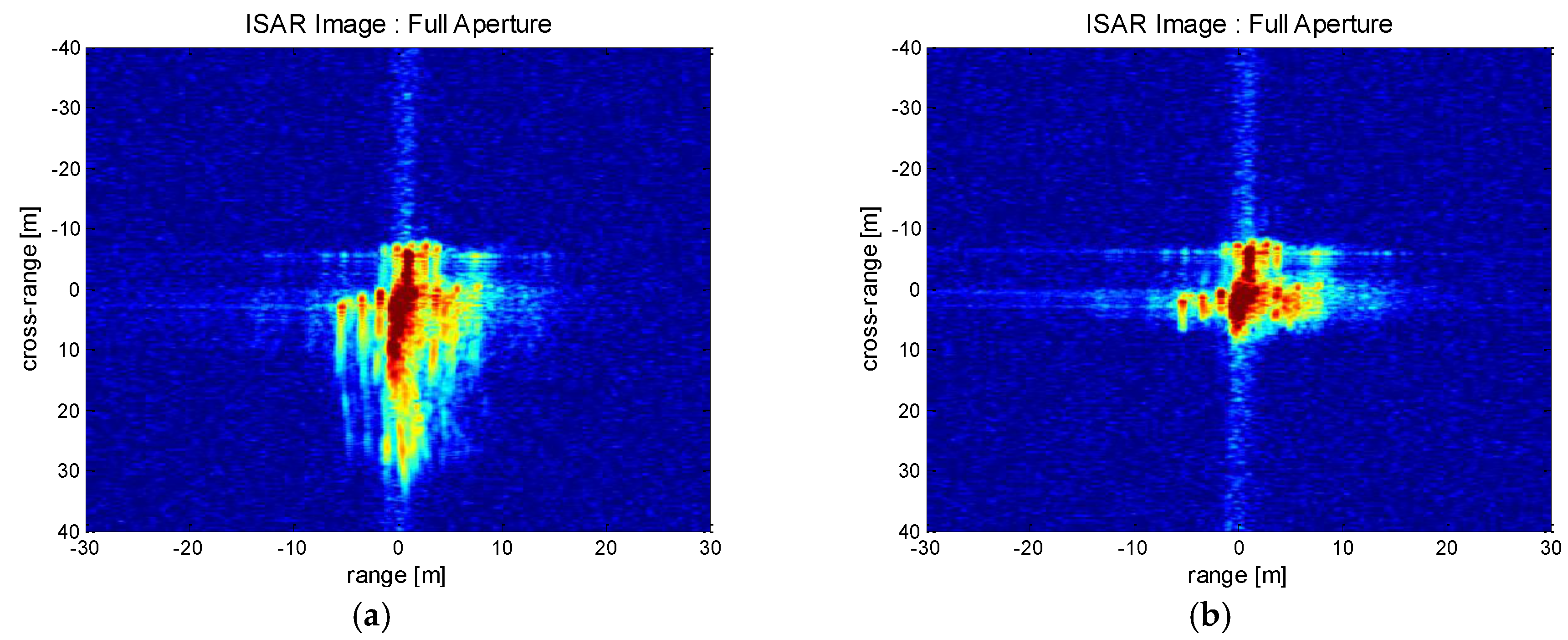
5. ISAR Experiments and Processing Results
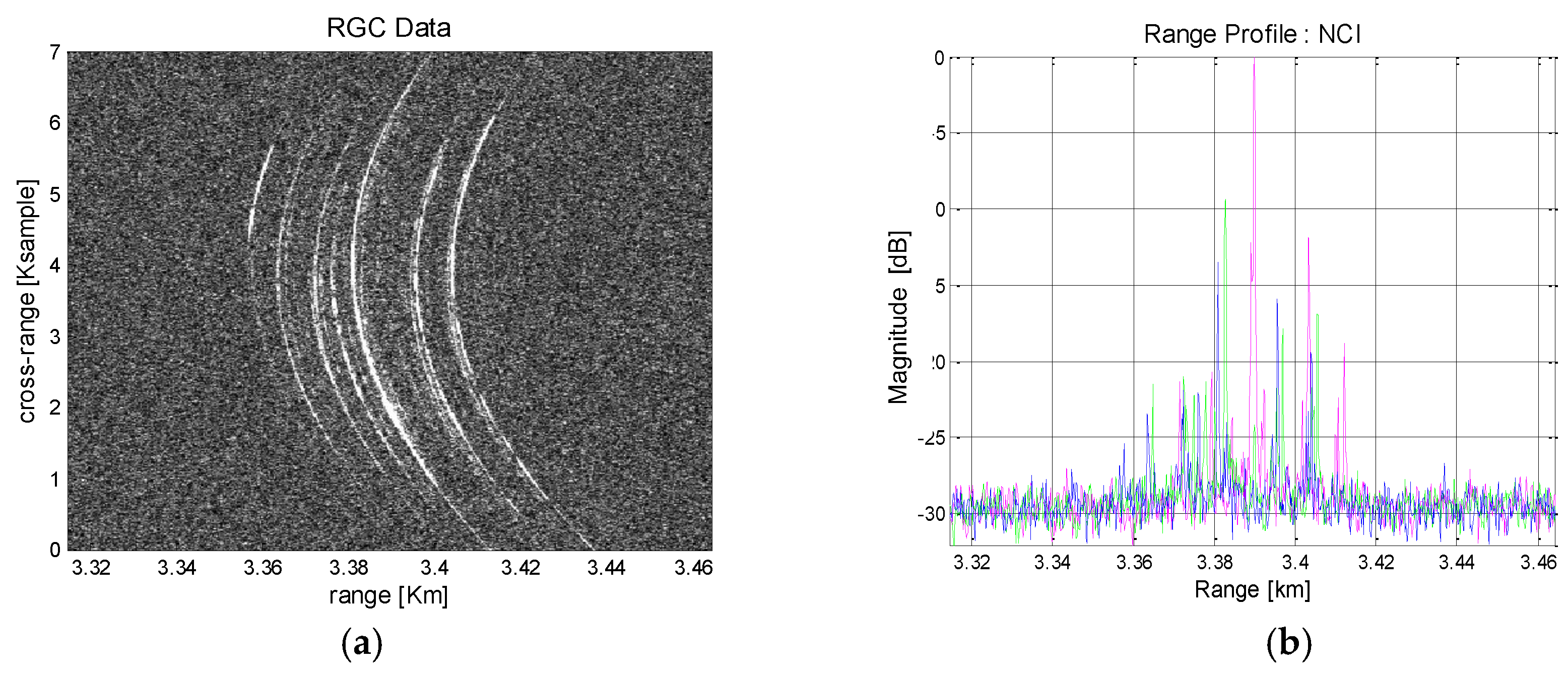
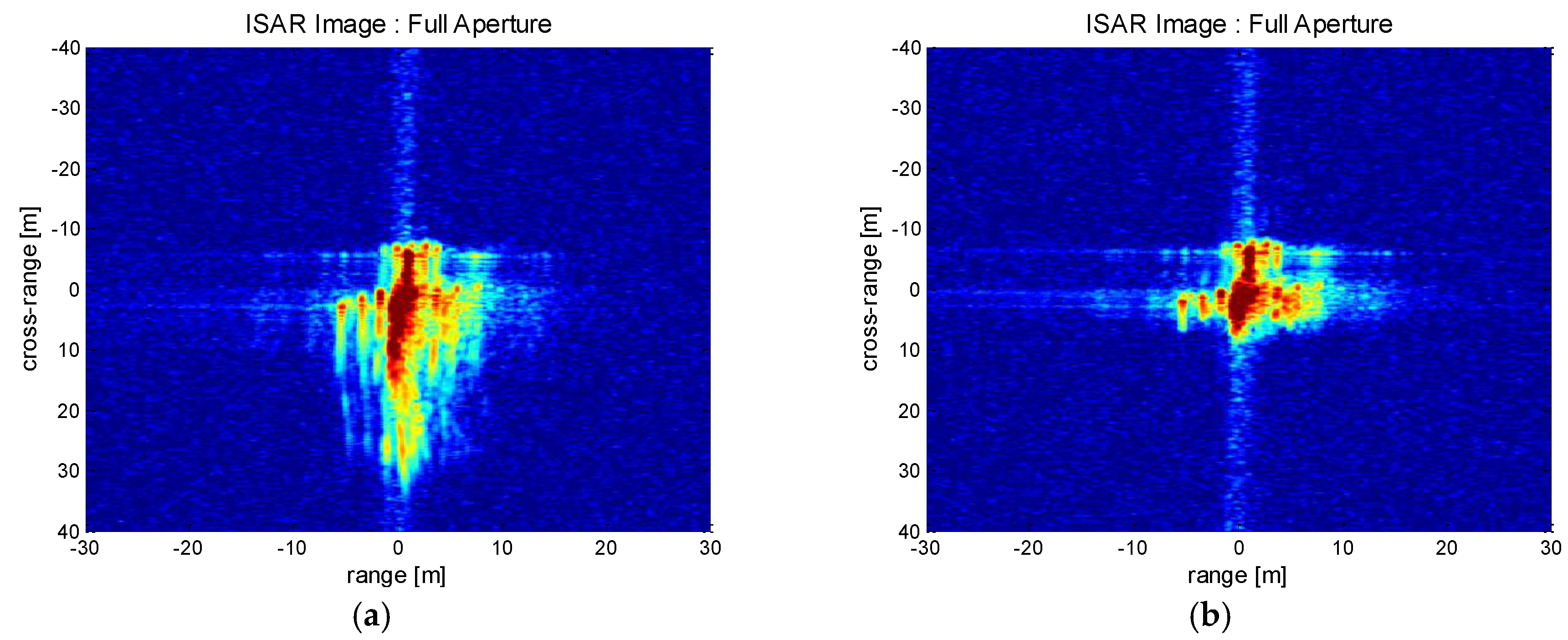
5.1. Processing Results of Boeing 747
5.2. Processing Results of Cessna 208
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- El-Kamchouchy, H.; Saada, K.; Hafez, A.E.D.S. Optimum stealthy aircraft detection using a multistatic radar. In Proceedings of the 16th International Conference on Advanced Communication Technology, Pyeongchang, Korea, 16–19 February 2014; pp. 337–342. [Google Scholar]
- Ritchie, M.; Fioranelli, F.; Griffiths, H.; Torvik, B. Micro-drone RCS analysis. In Proceedings of the 2015 IEEE Radar Conference, Johannesburg, South Africa, 27–30 October 2015; pp. 452–456. [Google Scholar]
- Perassoli, M.; Balleri, A.; Woodbridge, K. Measurements and analysis of multistatic and multimodal micro-Doppler signatures for automatic target classification. In Proceedings of the 2014 IEEE Radar Conference, Cincinnati, OH, USA, 19–23 May 2014; pp. 324–328. [Google Scholar]
- Kylmälä, J.; Salminen, V.J.; Tuohimaa, A.; Lensu, T. Search radar modification for long range ISAR target recognition. In Proceedings of the 2013 14th International Radar Symposium (IRS), Dresden, Germany, 19–21 June 2013; pp. 597–600. [Google Scholar]
- Li, J.; Wu, R.; Chen, V.C. Robust autofocus algorithm for ISAR imaging of moving targets. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 1056–1069. [Google Scholar]
- Delisle, G.Y.; Wu, H. Moving target imaging and trajectory computation using ISAR. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 887–899. [Google Scholar] [CrossRef]
- Munoz-Ferreras, J.M.; Perez-Martinez, F. Extended envelope correlation for range bin alignment in ISAR. In Proceedings of the 2007 IET International Conference on Radar Systems, Edinburgh, UK, 5–18 October 2007; pp. 1–5. [Google Scholar]
- Junfeng, W.; Kasilingam, D. Global range alignment for ISAR. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 351–357. [Google Scholar] [CrossRef]
- Steinberg, B.D. Microwave imaging of aircraft. Proc. IEEE 1988, 76, 1578–1592. [Google Scholar] [CrossRef]
- Wahl, D.E.; Eichel, P.H.; Ghiglia, D.C.; Jakowatz, C.V. Phase gradient autofocus—a robust tool for high resolution SAR phase correction. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 827–835. [Google Scholar] [CrossRef]
- Martorella, M.; Berizzi, F.; Haywood, B. Contrast maximization based technique for 2-D ISAR autofocusing. IEE Proc. Radar Sonar Navig. 2005, 152, 253–262. [Google Scholar] [CrossRef]
- Xi, L.; Guosui, L.; Ni, J. Autofocusing of ISAR images based on entropy minimization. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 1240–1252. [Google Scholar] [CrossRef]
- Wehner, D.R. High-Resolution Radar; Artech House: Boston, MA, USA, 1995. [Google Scholar]
- Xiao, D.; Su, F.; Wu, J. Multi-target ISAR imaging based on image segmentation and short-time Fourier transform. In Proceedings of the 2012 5th International Congress on Image and Signal Processing, Chongqing, China, 16–18 October 2012; pp. 1832–1836. [Google Scholar]
- Su, F.; Gao, J.; Xiao, D. Shipborne ISAR imaging based on time frequency signal analysis. In Proceedings of the 2012 5th International Congress on Image and Signal Processing, Chongqing, China, 16–18 October 2012; pp. 1575–1579. [Google Scholar]
- Gao, X.; Liu, Z.; Chen, H.; Li, X. Fourier-sparsity integrated method for complex target ISAR imagery. Sensors 2015, 15, 2723–2736. [Google Scholar] [CrossRef] [PubMed]
- Rao, W.; Li, G.; Wang, X.; Xia, X.G. Parametric sparse representation method for ISAR imaging of rotating targets. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 910–919. [Google Scholar] [CrossRef]
- Rao, W.; Li, G.; Wang, X.; Xia, X.G. Adaptive Sparse Recovery by Parametric Weighted L1 Minimization for ISAR Imaging of Uniformly Rotating Targets. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 942–952. [Google Scholar] [CrossRef]
- Li, G.; Zhang, H.; Wang, X.; Xia, X.-G. ISAR 2-D imaging of uniformly rotating targets via matching pursuit. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 1838–1846. [Google Scholar] [CrossRef]
- Lipps, R.; Kerr, D. Polar reformatting for ISAR imaging. In Proceedings of the 1998 IEEE Radar Conference, Dallas, TX, USA, 14 May 1998; pp. 275–280. [Google Scholar]
- Muñoz-Ferreras, J.M.; Pérez-Martínez, F. Non-uniform rotation rate estimation for ISAR in case of slant range migration induced by angular motion. IET Radar Sonar Navig. 2007, 1, 251–260. [Google Scholar] [CrossRef]
- Ruan, H.; Wu, Y.; Jia, X.; Ye, W. Novel ISAR imaging algorithm for maneuvering targets based on a modified keystone transform. IEEE Geosci. Remote Sens. Lett. 2014, 11, 128–132. [Google Scholar] [CrossRef]
- Chen, V.C.; Shie, Q. Joint Time-Frequency Transform for Radar Range-Doppler Imaging. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 486–499. [Google Scholar] [CrossRef]
- Bai, X.; Tao, R.; Wang, Z.; Wang, Y. ISAR imaging of a ship target based on parameter estimation of multicomponent quadratic frequency-modulated signals. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1418–1429. [Google Scholar] [CrossRef]
- Martorella, M.; Acito, N.; Berizzi, F. Statistical CLEAN technique for ISAR imaging. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3552–3560. [Google Scholar] [CrossRef]
- Xing, M.; Wu, R.; Li, Y.; Bao, Z. New ISAR imaging algorithm based on modified Wigner-Ville distribution. IET Radar Sonar Navig. 2009, 3, 70–80. [Google Scholar] [CrossRef]
- Zhang, L.; Si, D.S. A novel ISAR algorithm for the imaging of ship targets based on AM-LFM model. In Proceedings of the IEEE 10th International Conference Signal Process, Beijing, China, 24–28 October 2010; pp. 2147–2151. [Google Scholar]
- Wang, Y.; Jiang, Y. Inverse synthetic aperture radar imaging of maneuvering target based on the product generalized cubic phase function. IEEE Geosci. Remote Sens. Lett. 2011, 8, 958–962. [Google Scholar] [CrossRef]
- Noviello, C.; Fornaro, G.; Martorella, M.; Reale, D. A Novel approach for Motion Compensation in ISAR System. In Proceedings of the EUSAR 2014, 10th European Conference on Synthetic Aperture Radar, Berlin, Germany, 3–5 June 2014; pp. 1–4. [Google Scholar]
- Noviello, C.; Fornaro, G.; Martorella, M. Focused SAR image formation of moving targets based on Doppler parameter estimation. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3460–3470. [Google Scholar] [CrossRef]
- Guccione, P.; Cafforio, C. Motion Compensation Processing of Airborne SAR Data. In Proceedings of the IGARSS 2008, IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008; pp. 1154–1157. [Google Scholar]
- Noviello, C.; Fornaro, G.; Braca, P.; Martorella, M. ISAR motion compensation based on a new Doppler parameters estimation procedure. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 2445–2448. [Google Scholar]
- Mittermayer, J.; Moreira, A. Spotlight SAR Data Processing Using the Frequency Scaling Algorithm. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2198–2214. [Google Scholar] [CrossRef]
- Cumming, I.; Neo, Y.; Wong, F. Interpretations of the omega-k algorithm and comparisons with other algorithms. Geosci. Remote Sens. Symp. 2003, 3, 1455–1458. [Google Scholar]
- Sack, M.; Itol, M.R.; Cumming, I.G. Application of Efficient Linear FM Matched Filtering Algorithms to SAR Processing. Commun. Radar Signal Process. 1985, 132, 45–57. [Google Scholar] [CrossRef]
- Ausherman, D.A.; Kozma, A.; Walker, J.L.; Jones, H.M.; Poggio, E.C. Developments in radar imaging. IEEE Trans. Aerosp. Electron. Syst. 1984, 20, 363–399. [Google Scholar] [CrossRef]
- Moreira, A.; Mittermayer, J.; Scheiber, R. Extended chirp scaling algorithm for air- and spaceborne SAR data processing in stripmap and ScanSAR imaging modes. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1123–1136. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Units |
|---|---|---|
| Centre frequency | X-band (9.66) | GHz |
| Pulse width | 20 | μs |
| Bandwidth | 500 | MHz |
| PRF | <1000 | Hz |
| Tx power | 40 | dBm |
| Receiver chain gain | 70 | dB |
| Aircraft Model | Target Range | Target Velocity | Exposure Time | Doppler Bandwidth | Elevation Angle |
|---|---|---|---|---|---|
| Boeing 747 | 3.38 km | 352 km/h | 8.61 s | 1453 Hz | ≈40° |
| Cessna 208 | 3.51 km | 259 km/h | 7.78 s | 690 Hz | ≈20° |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, J.-H.; Lee, K.-W.; Lee, W.-K.; Jung, C.-H. High Resolution Full-Aperture ISAR Processing through Modified Doppler History Based Motion Compensation. Sensors 2017, 17, 1234. https://doi.org/10.3390/s17061234
Song J-H, Lee K-W, Lee W-K, Jung C-H. High Resolution Full-Aperture ISAR Processing through Modified Doppler History Based Motion Compensation. Sensors. 2017; 17(6):1234. https://doi.org/10.3390/s17061234
Chicago/Turabian StyleSong, Jung-Hwan, Kee-Woong Lee, Woo-Kyung Lee, and Chul-Ho Jung. 2017. "High Resolution Full-Aperture ISAR Processing through Modified Doppler History Based Motion Compensation" Sensors 17, no. 6: 1234. https://doi.org/10.3390/s17061234
APA StyleSong, J.-H., Lee, K.-W., Lee, W.-K., & Jung, C.-H. (2017). High Resolution Full-Aperture ISAR Processing through Modified Doppler History Based Motion Compensation. Sensors, 17(6), 1234. https://doi.org/10.3390/s17061234