
Underwater Depth and Temperature Sensing Based on Fiber Optic Technology for Marine and Fresh Water Applications

 , ,
, ,  ,
,  and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
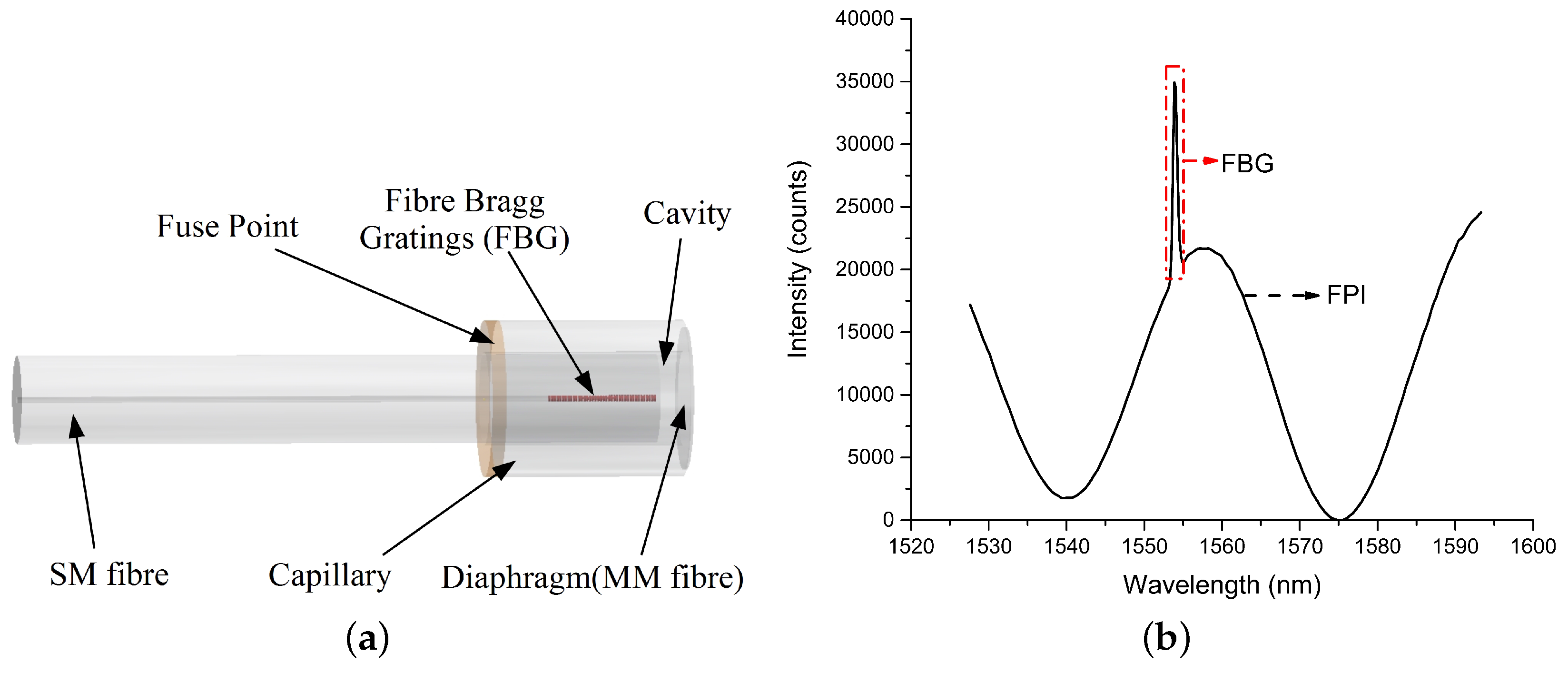
2. Sensor Design
3. Experimental Setup
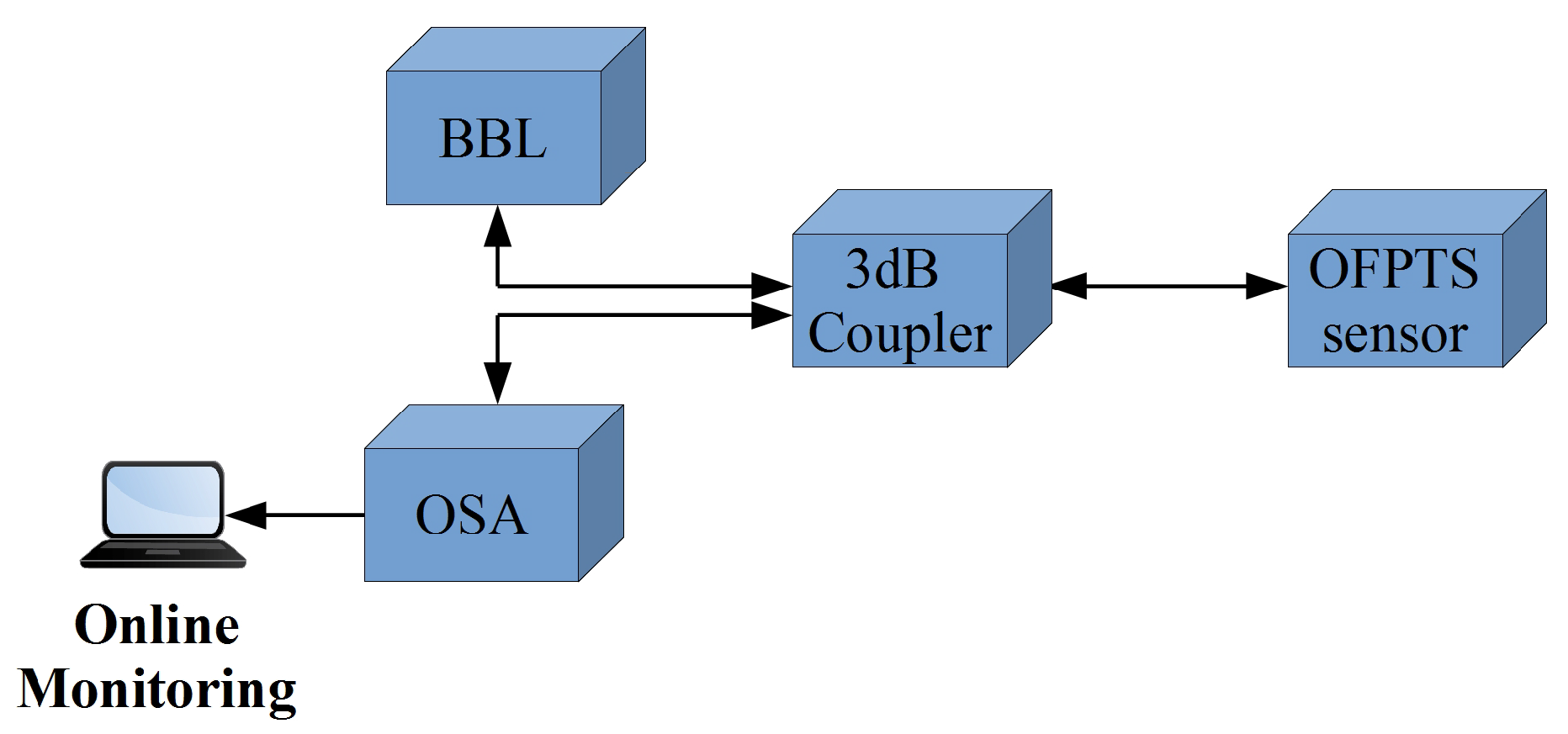
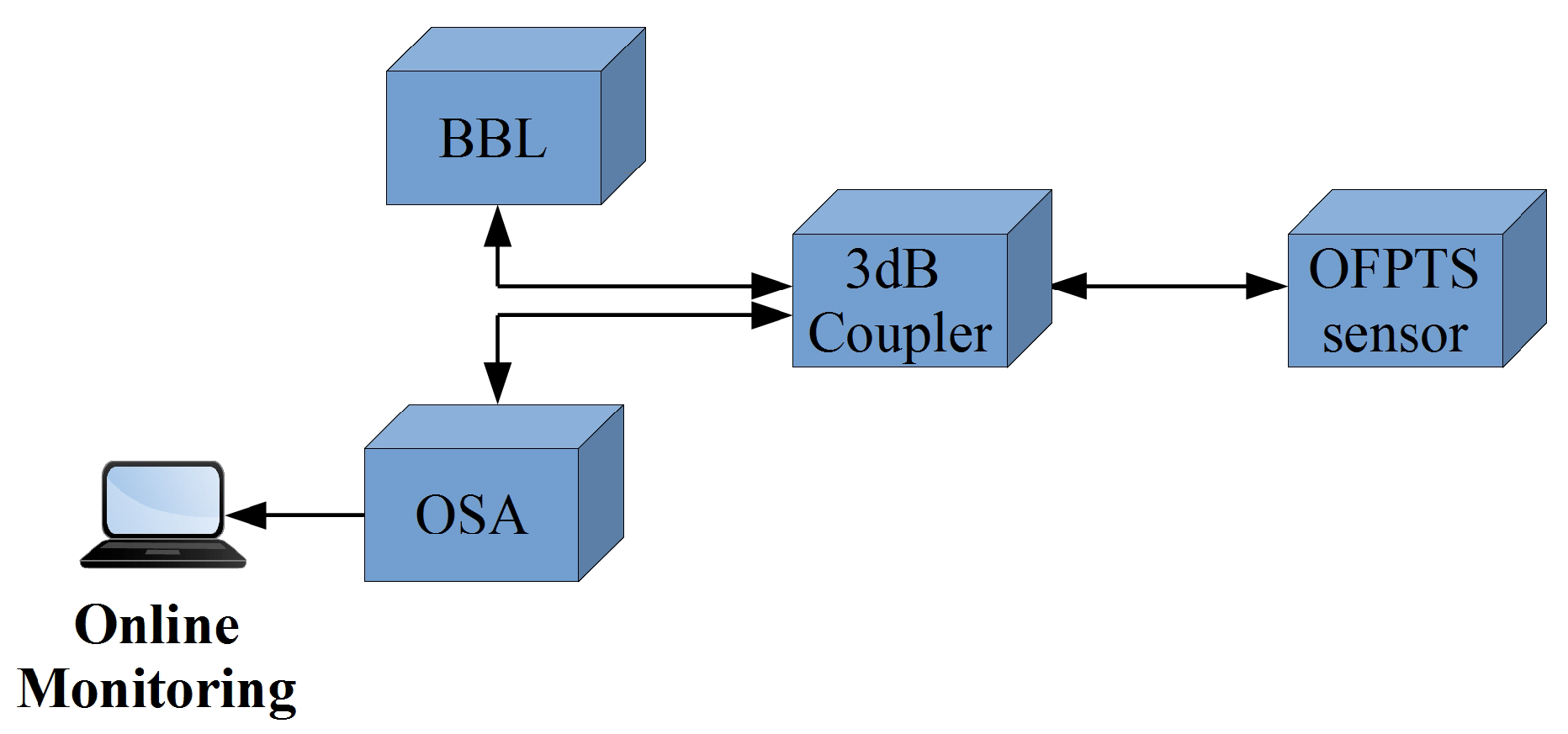
3.1. Optical Setup
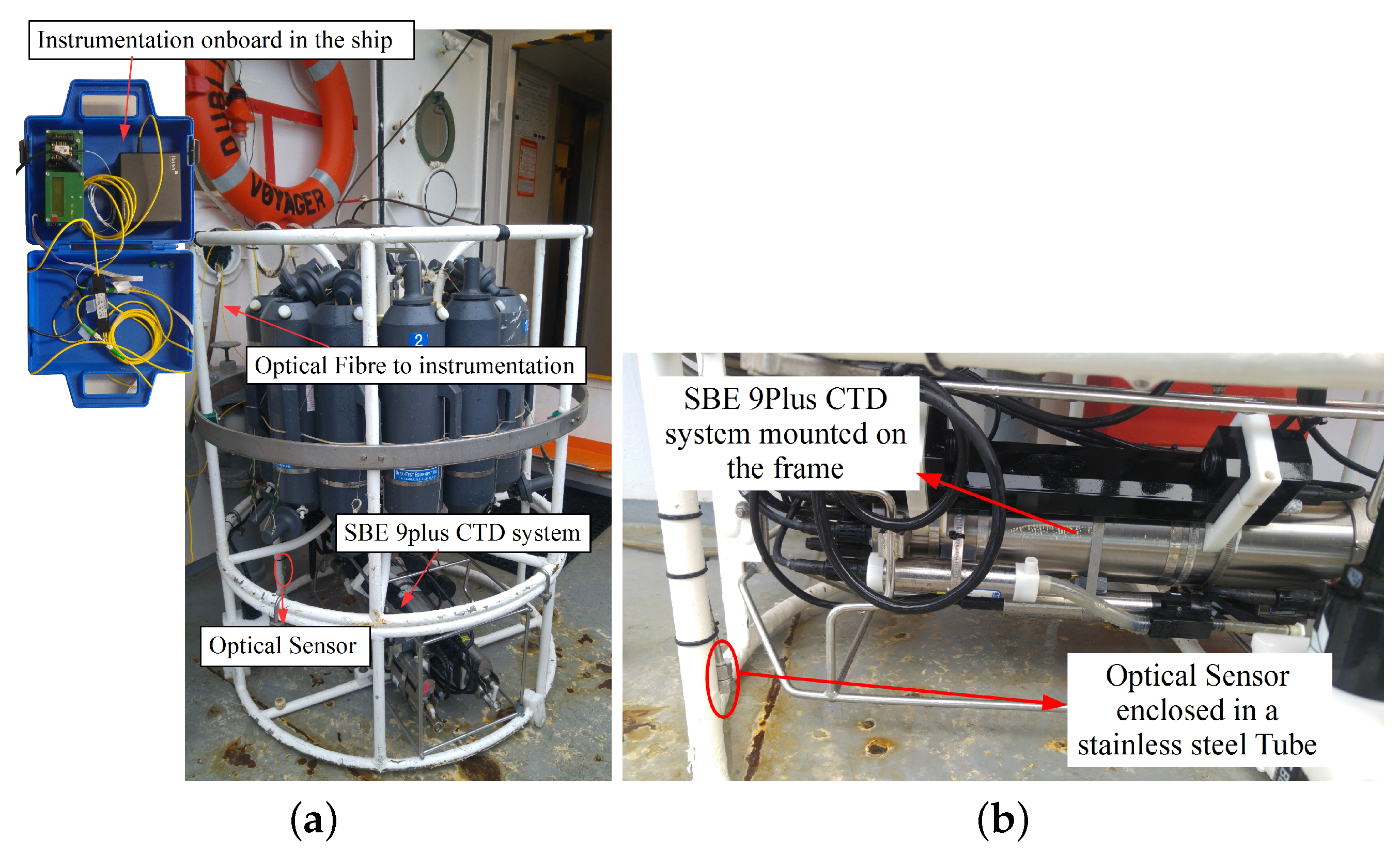
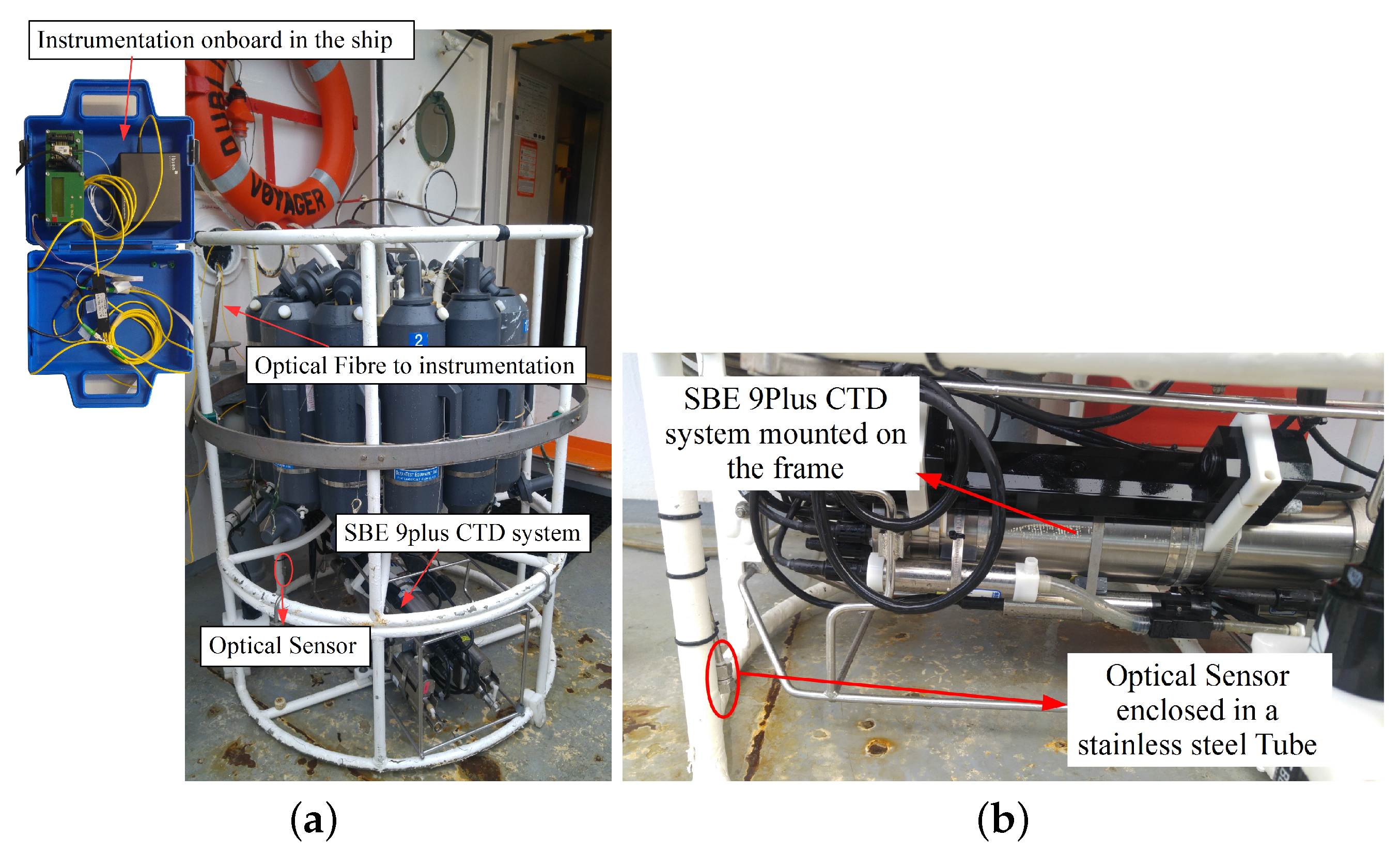
3.2. Marine Sensor Deployment in Sea Water
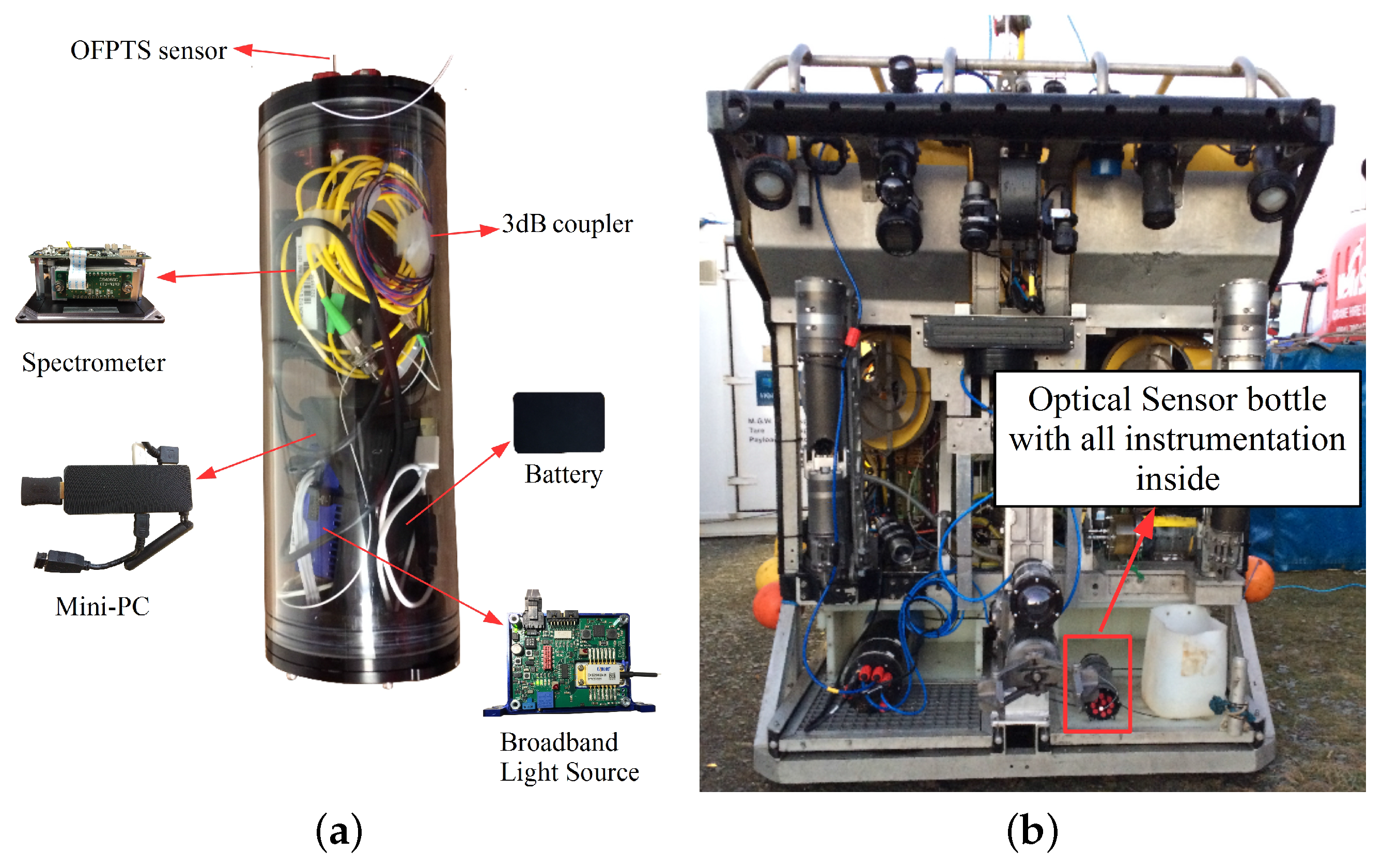
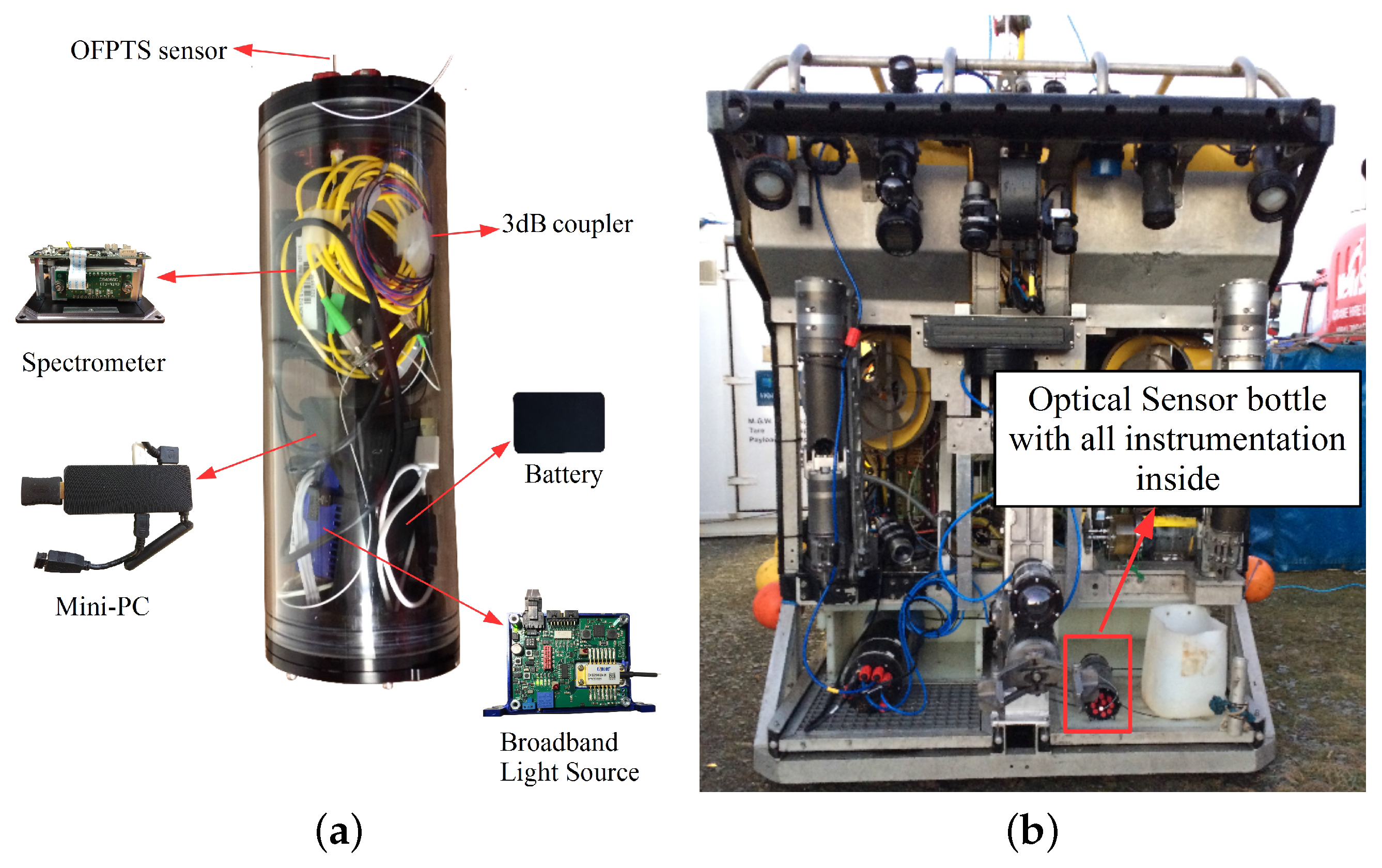
3.3. Marine Sensor Bottle on ROV in Fresh Water
4. Results and Discussion
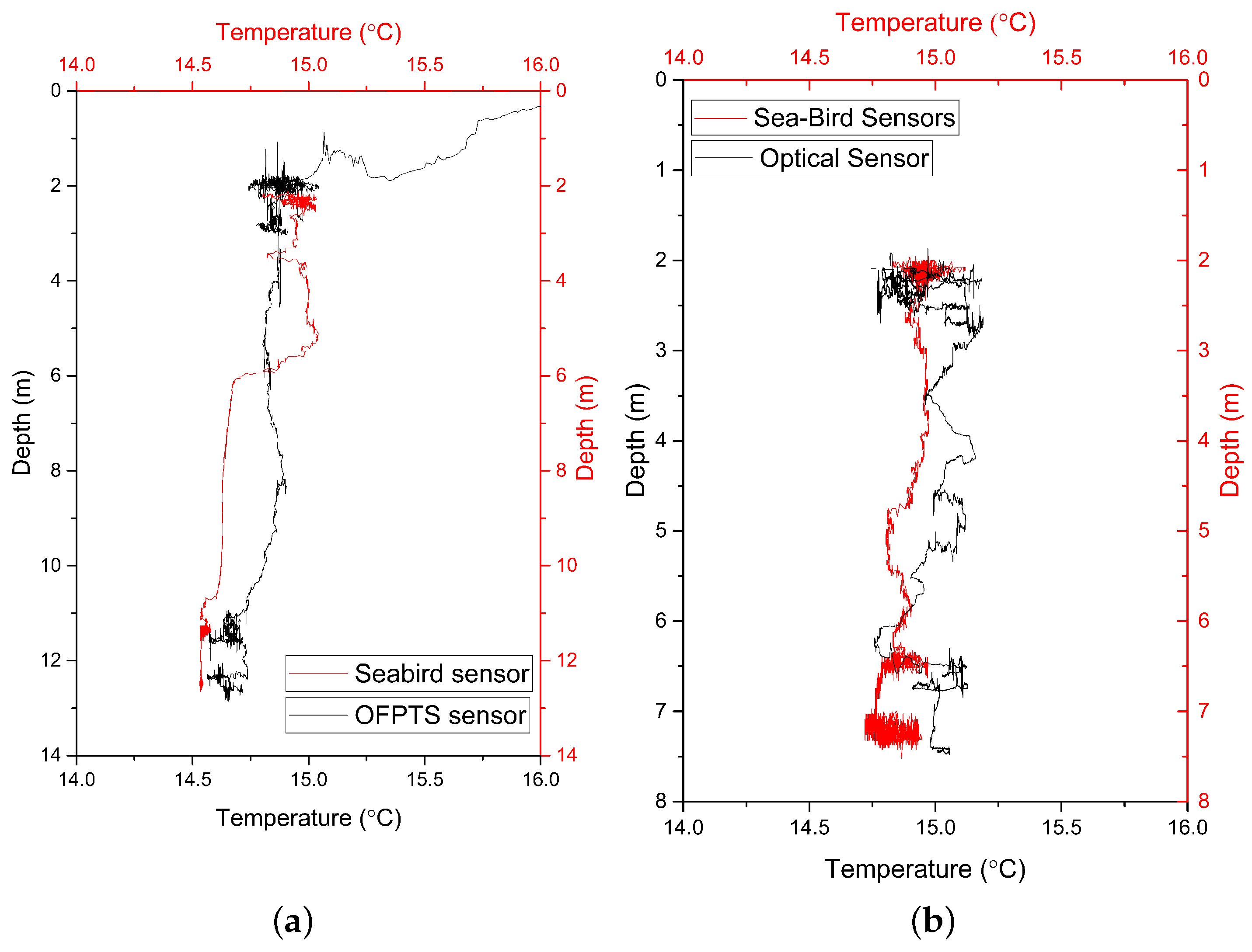
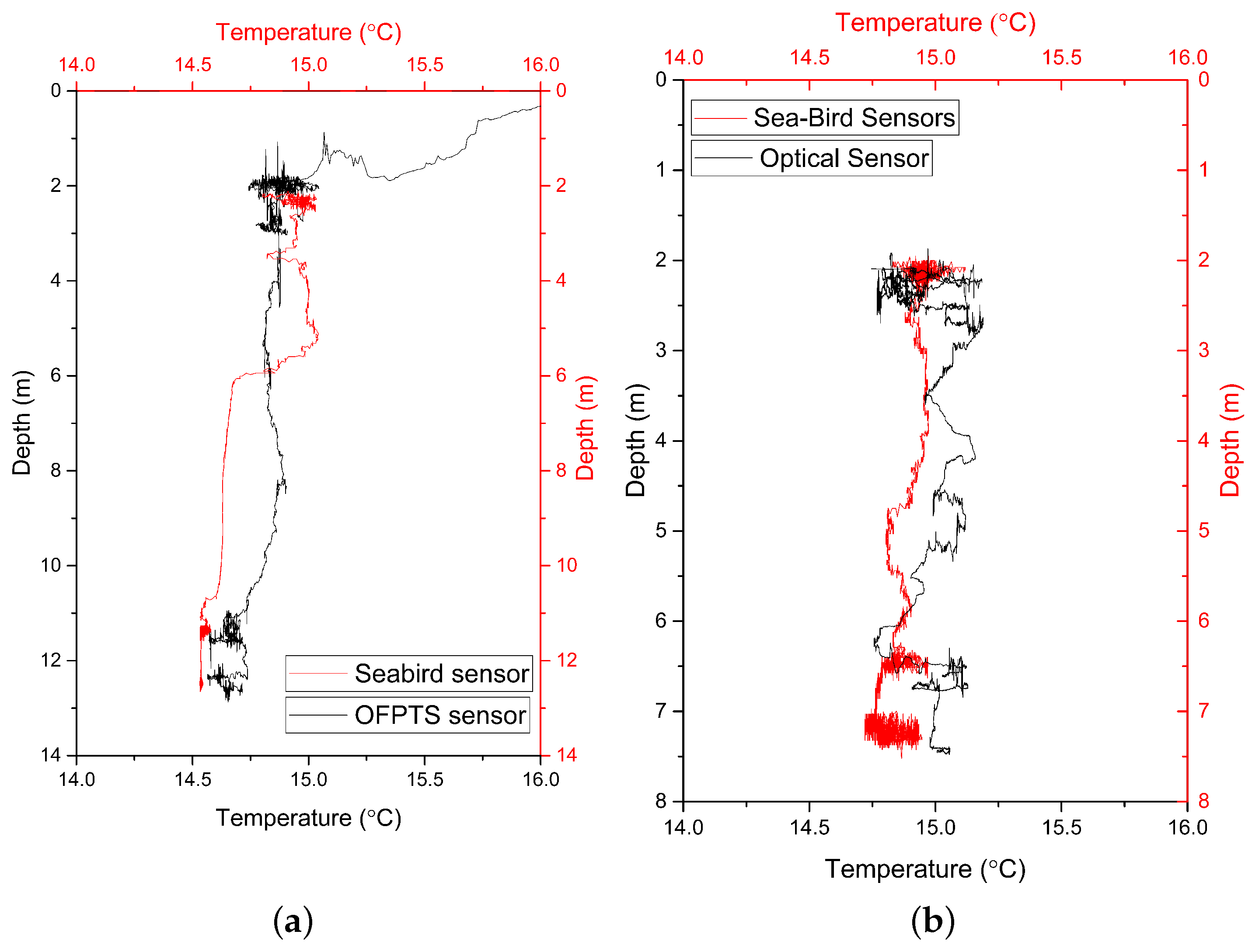
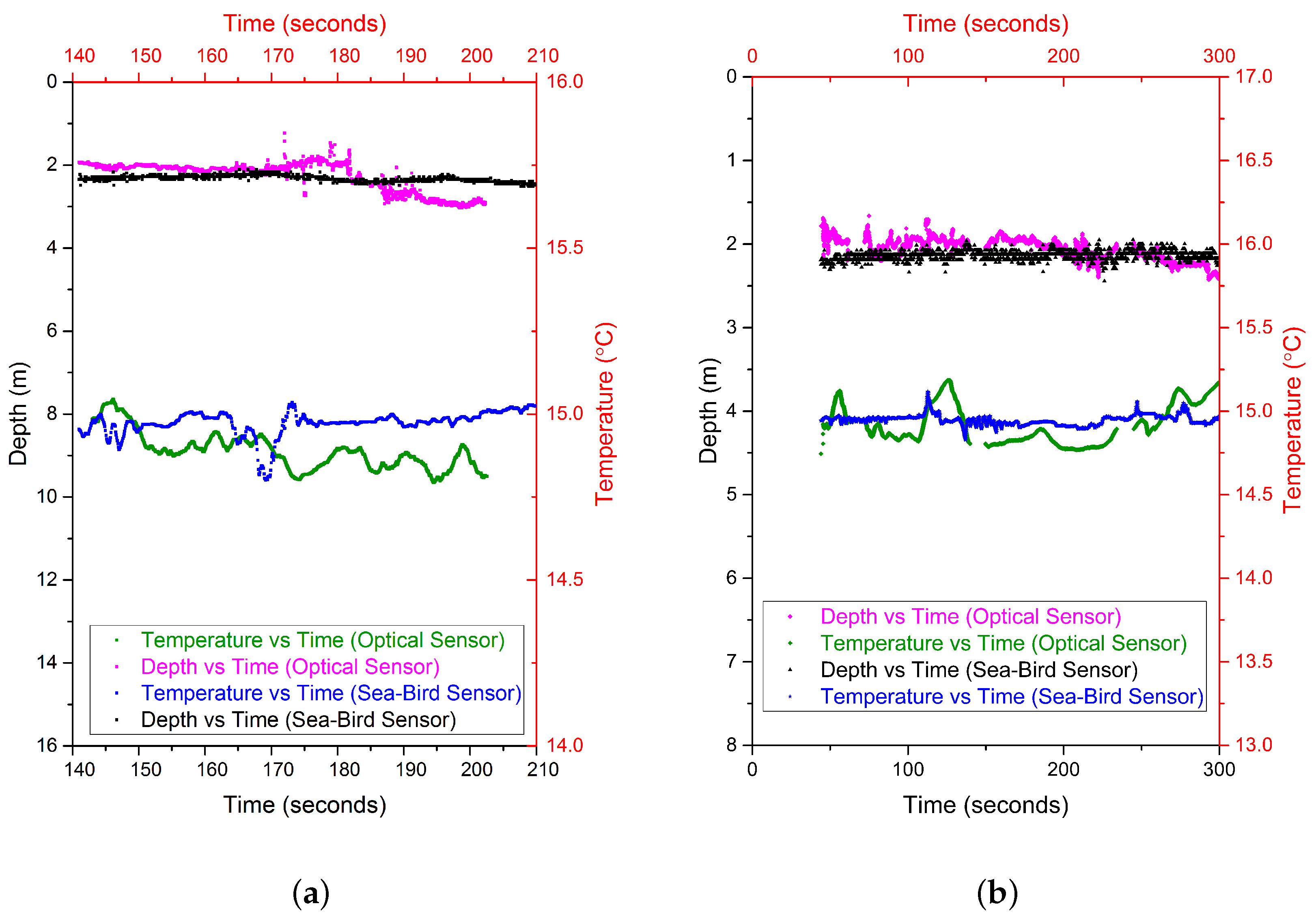
4.1. Sensor Mounted on the CTD Rosette for Sea Water Deployment
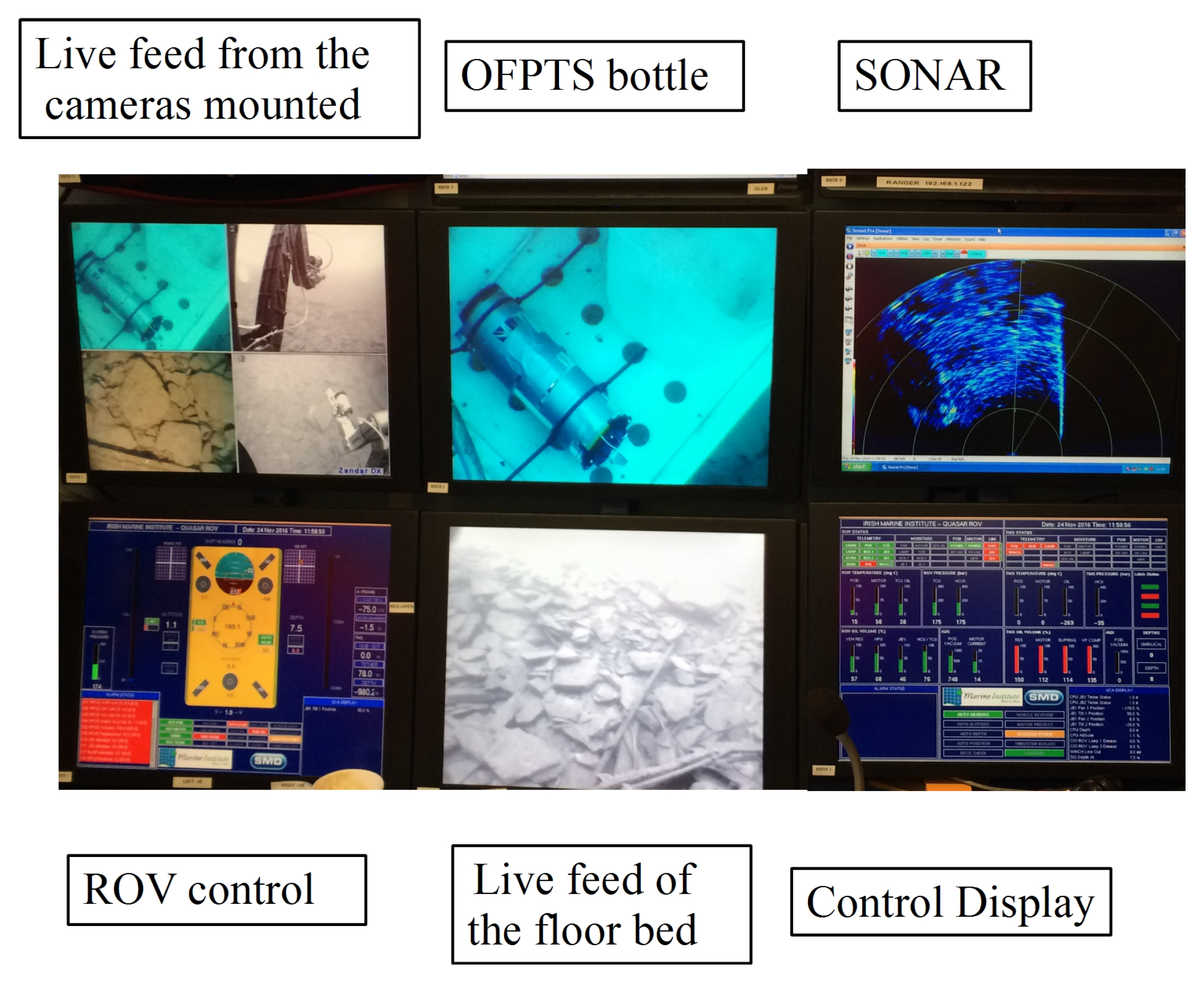
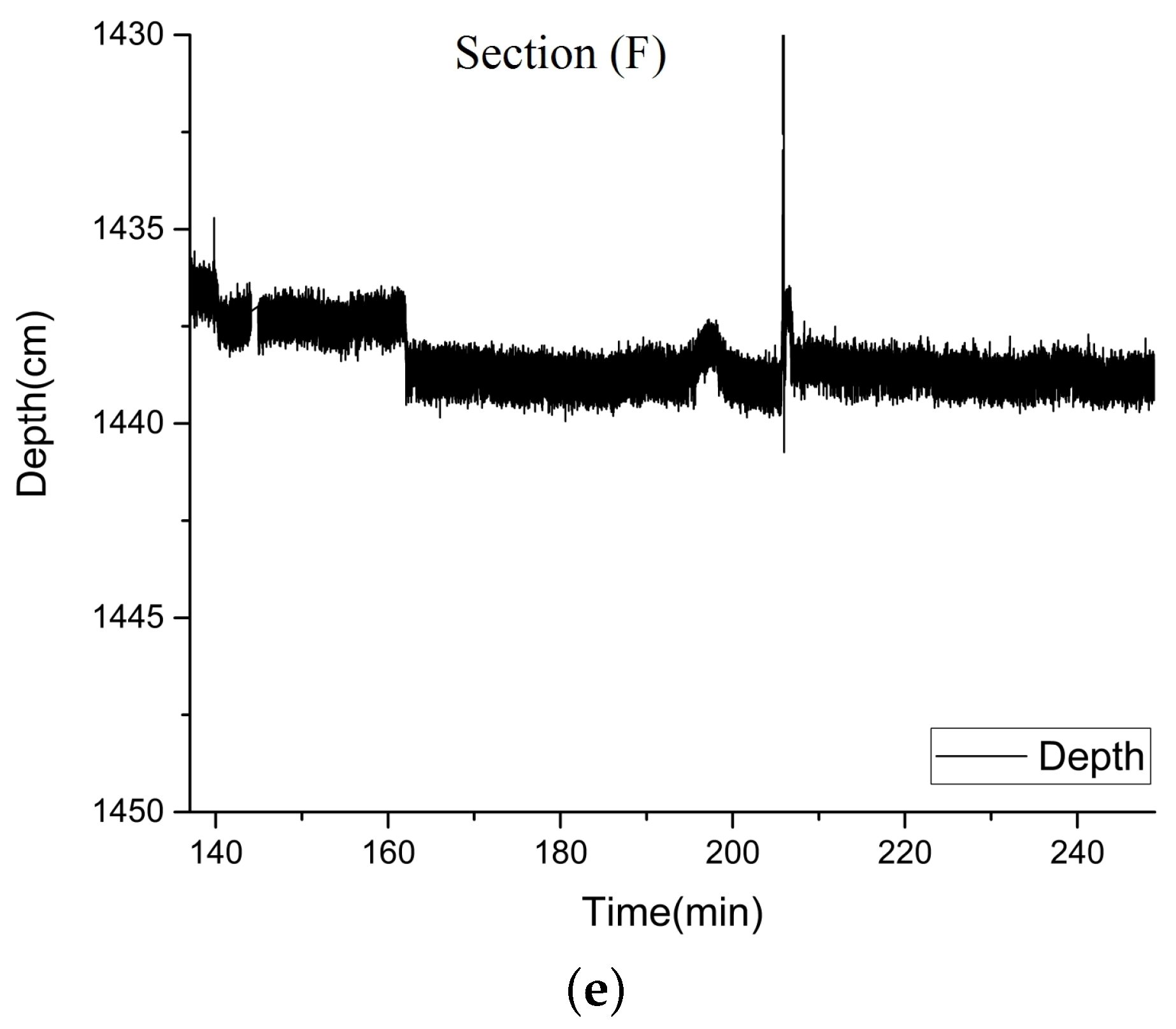
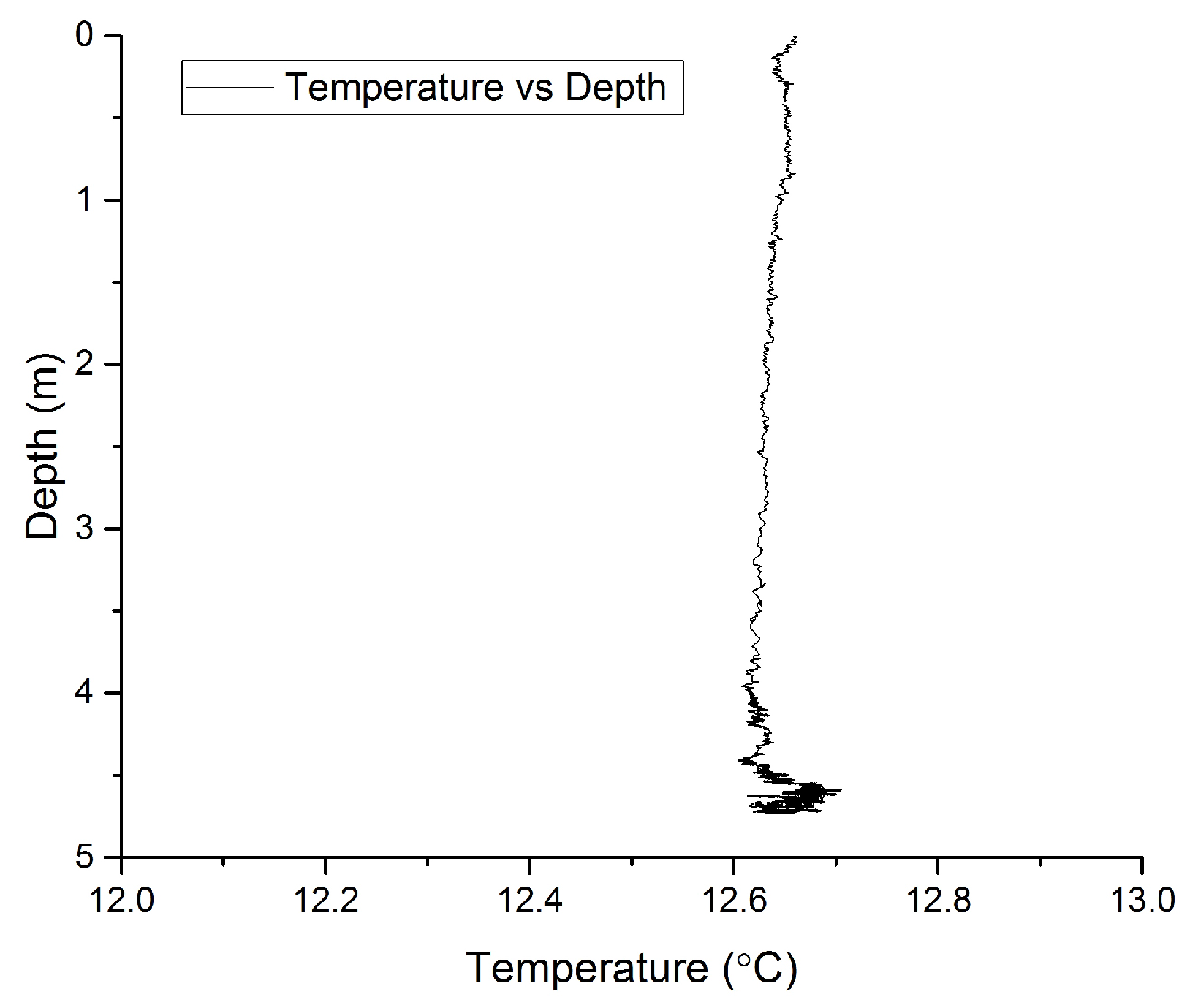
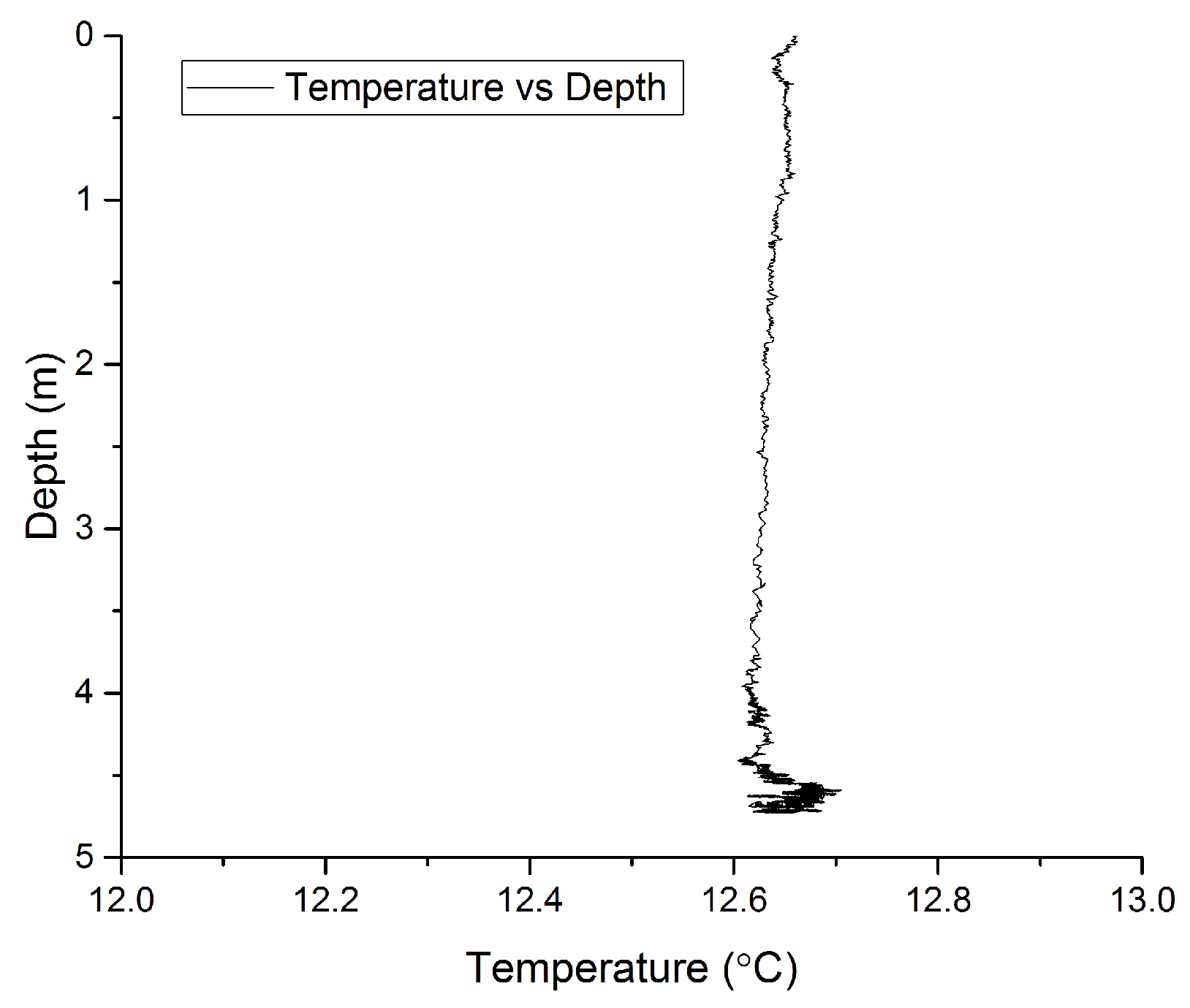
4.2. Sensor Mounted on the ROV for Fresh Water Deployment
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| AUV | Autonomous Underwater Vehicle |
| CTD | Conductivity, Temperature and Depth |
| EFPI | Extrinsic Fabry-Perot Interferometer |
| EPSPG | Enterprise Partnership Scheme PostGraduate |
| FBG | Fibre Bragg Gratings |
| GPS | Global Positioning System |
| HF | HydroFluoric Acid |
| MM | MultiMode |
| NMEA | National Marine Electronics Association |
| OFPTS | Optical Fibre Pressure and Temperature Sensor |
| OSA | Optical Spectrum Analyzer |
| ROV | Remote Operated Vehicle |
| SM | Single Mode |
References
- Ship-based Repeat Hydrography: A Strategy for a Sustained Global Programme. Available online: http://unesdoc.unesco.org/images/0018/001865/186560e.pdf (accessed on 7 March 2017).
- Sea-Level Rise and Variability–A Summary for Policy Makers. Available online: http://unesdoc.unesco.org/images/0018/001893/189369e.pdf (accessed on 7 March 2017).
- Oldfield, S. Pressure or depth? In Proceedings of the OCEANS’94, Brest, France, 13–16 September 1994; Volume 2, pp. II/372–II/376. [Google Scholar]
- Aravamudhan, S.; Bhat, S.; Bethala, B.; Bhansali, S.; Langebrake, L. MEMS based Conductivity-Temperature-Depth (CTD) Sensor for Harsh Oceanic Environment. In Proceedings of the OCEANS 2005, Washington, WA, USA, 17–23 September 2005; Volume 2, pp. 1785–1789. [Google Scholar]
- Hooker, S.K.; Boyd, I.L. Salinity sensors on seals: Use of marine predators to carry CTD data loggers. Deep Sea Res. Part I Oceanogr. Res. Pap. 2003, 50, 927–939. [Google Scholar] [CrossRef]
- Boehlert, G.W.; Costa, D.P.; Crocker, D.E.; Green, P.; O’Brien, T.; Levitus, S.; Le Boeuf, B.J. Autonomous pinniped enviromental samplers: Using instrumented animals as oceanographic data collectors. J. Atmos. Ocean. Technol. 2001, 18, 1882–1893. [Google Scholar] [CrossRef]
- Broadbent, H.A.; Ivanov, S.Z.; Fries, D.P. A miniature, low cost CTD system for coastal salinity measurements. Meas. Sci. Technol. 2007, 18, 3295–3302. [Google Scholar] [CrossRef]
- Houston, M.; Paros, J. High accuracy pressure instrumentation for underwater applications. In Proceedings of the 1998 International Symposium on Underwater Technology, Tokyo, Japan, 15–17 April 1998; pp. 307–311. [Google Scholar]
- Mohan, A.; Malshe, A.; Aravamudhan, S.; Bhansali, S. Piezoresistive MEMS pressure sensor and packaging for harsh oceanic environment. In Proceedings of the 54th Electronic Components and Technology Conference (IEEE Cat. No. 04CH37546), Las Vegas, NV, USA, 1–4 June 2004; Volume 1, pp. 948–950. [Google Scholar]
- Aravamudhan, S.; Bhansali, S. Reinforced piezoresistive pressure sensor for ocean depth measurements. Sens. Actuators A Phys. 2008, 142, 111–117. [Google Scholar] [CrossRef]
- Sea-Bird Scientific SBE9 Plus Manual. Available online: http://www.seabird.com/sites/default/files/ocuments/9plus_018.pdf (accessed on 7 September 2016).
- Ocean Seven 316 Plus CTD for Oceanography. Available online: http://www.idronaut.it/cms/view/products/multiparameter-ctds/environmental-ctds/ocean-even-316iplusi/s300 (accessed on 7 March 2017).
- Valeport Ltd. miniCTD Data Sheet. Available online: http://www.valeport.co.uk/Portals/0/Docs/Datasheets/Valeport-miniCTD.pdf (accessed on 7 March 2017).
- Kersey, A.D. Optical fiber sensors for permanent downwell monitoring applications in the oil and gas industry. IEICE Trans. Electron. 2000, 83, 400–404. [Google Scholar]
- Willsch, R.; Ecke, W.; Bartelt, H. Optical fiber grating sensor networks and their application in electric power facilities, aerospace and geotechnical engineering. In Proceedings of the 15th Optical Fiber Sensors Conference Technical Digest. OFS 2002 (Cat. No.02EX533), Portland, OR, USA, 6–10 May 2002; Volume 1, pp. 49–54. [Google Scholar]
- Grattan, K.; Sun, T. Fiber optic sensor technology: An overview. Sens. Actuators A Phys. 2000, 82, 40–61. [Google Scholar] [CrossRef]
- Crescentini, M.; Bennati, M.; Tartagni, M. Design of integrated and autonomous conductivity–temperature–depth (CTD) sensors. AEU Int. J. Electron. Commun. 2012, 66, 630–635. [Google Scholar] [CrossRef]
- Van Haren, H.; Gostiaux, L. Characterizing turbulent overturns in CTD-data. Dyn. Atmos. Oceans 2014, 66, 58–76. [Google Scholar] [CrossRef]
- Lin, C.M.; Liu, Y.C.; Liu, W.F.; Fu, M.Y.; Sheng, H.J.; Bor, S.S.; Tien, C.L. High-sensitivity simultaneous pressure and temperature sensor using a superstructure fiber grating. IEEE Sens. J. 2006, 6, 691–696. [Google Scholar] [CrossRef]
- Yu, Q.; Zhou, X. Pressure sensor based on the fiber-optic extrinsic Fabry-Perot interferometer. Photonic Sens. 2011, 1, 72–83. [Google Scholar] [CrossRef]
- Bae, H.; Yu, M. Miniature Fabry-Perot pressure sensor created by using UV-molding process with an optical fiber based mold. Opt. Express 2012, 20, 14573–14583. [Google Scholar] [CrossRef] [PubMed]
- Pevec, S.; Donlagic, D. Miniature all-fiber Fabry–Perot sensor for simultaneous measurement of pressure and temperature. Appl. Opt. 2012, 51, 4536–4541. [Google Scholar] [CrossRef] [PubMed]
- Bremer, K.; Lewis, E.; Moss, B.; Leen, G.; Lochmann, S.; Mueller, I. Conception and preliminary evaluation of an optical fibre sensor for simultaneous measurement of pressure and temperature. J. Phys. Conf. Ser. 2009, 178, 012016. [Google Scholar] [CrossRef]
- Pinet, E.; Cibula, E.; Donlagic, D. Ultra-miniature all-glass Fabry-Perot pressure sensor manufactured at the tip of a multimode optical fiber. Fiber Opt. Sens. Appl. 2007, 6770, 67700U–67700U-8. [Google Scholar]
- Giovanni, D. Flat and Corrugated Diaphragm Design Handbook; CRC Press: Boca Raton, FL, USA, 1982; Volume 11. [Google Scholar]
- Rao, Y.J. In-fibre Bragg grating sensors. Meas. Sci. Technol. 1997, 8, 355. [Google Scholar] [CrossRef]
- FBGS Technologies GMBH DTG TECHNOLOGIES. Available online: http://www.fbgs.com/technology/dtg-technology/ (accessed on 30 September 2016).
- Poeggel, S.; Duraibabu, D.; Lacraz, A.; Kalli, K.; Tosi, D.; Leen, G.; Lewis, E. Femtosecond-Laser-Based Inscription Technique for Post-Fiber-Bragg Grating Inscription in an Extrinsic Fabry–Perot Interferometer Pressure Sensor. IEEE Sens. J. 2016, 16, 3396–3402. [Google Scholar] [CrossRef]
- Duraibabu, D.B.; Poeggel, S.; Omerdic, E.; Capocci, R.; Lewis, E.; Newe, T.; Leen, G.; Toal, D.; Dooly, G. An Optical Fibre Depth (Pressure) Sensor for Remote Operated Vehicles in Underwater Applications. Sensors 2017, 17, 406. [Google Scholar] [CrossRef] [PubMed]
- Steele, J.H.; Thorpe, S.A.; Turekian, K.K. Measurement Techniques, Sensors and Platforms–A Derivative of Encyclopedia of Ocean Sciences, 2nd ed.; Elsevier: Amsterdam, The Netherlands, 2009. [Google Scholar]



© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duraibabu, D.B.; Leen, G.; Toal, D.; Newe, T.; Lewis, E.; Dooly, G. Underwater Depth and Temperature Sensing Based on Fiber Optic Technology for Marine and Fresh Water Applications. Sensors 2017, 17, 1228. https://doi.org/10.3390/s17061228
Duraibabu DB, Leen G, Toal D, Newe T, Lewis E, Dooly G. Underwater Depth and Temperature Sensing Based on Fiber Optic Technology for Marine and Fresh Water Applications. Sensors. 2017; 17(6):1228. https://doi.org/10.3390/s17061228
Chicago/Turabian StyleDuraibabu, Dinesh Babu, Gabriel Leen, Daniel Toal, Thomas Newe, Elfed Lewis, and Gerard Dooly. 2017. "Underwater Depth and Temperature Sensing Based on Fiber Optic Technology for Marine and Fresh Water Applications" Sensors 17, no. 6: 1228. https://doi.org/10.3390/s17061228
APA StyleDuraibabu, D. B., Leen, G., Toal, D., Newe, T., Lewis, E., & Dooly, G. (2017). Underwater Depth and Temperature Sensing Based on Fiber Optic Technology for Marine and Fresh Water Applications. Sensors, 17(6), 1228. https://doi.org/10.3390/s17061228