
Traffic Sign Detection System for Locating Road Intersections and Roundabouts: The Chilean Case



Abstract
:1. Introduction
2. State-of-the-Art
2.1. Segmentation for ROI Generation
2.2. Recognition
2.3. Databases
3. Proposed Approach for Segmentation and Recognition of Traffic Signs at Road Intersections and Roundabouts
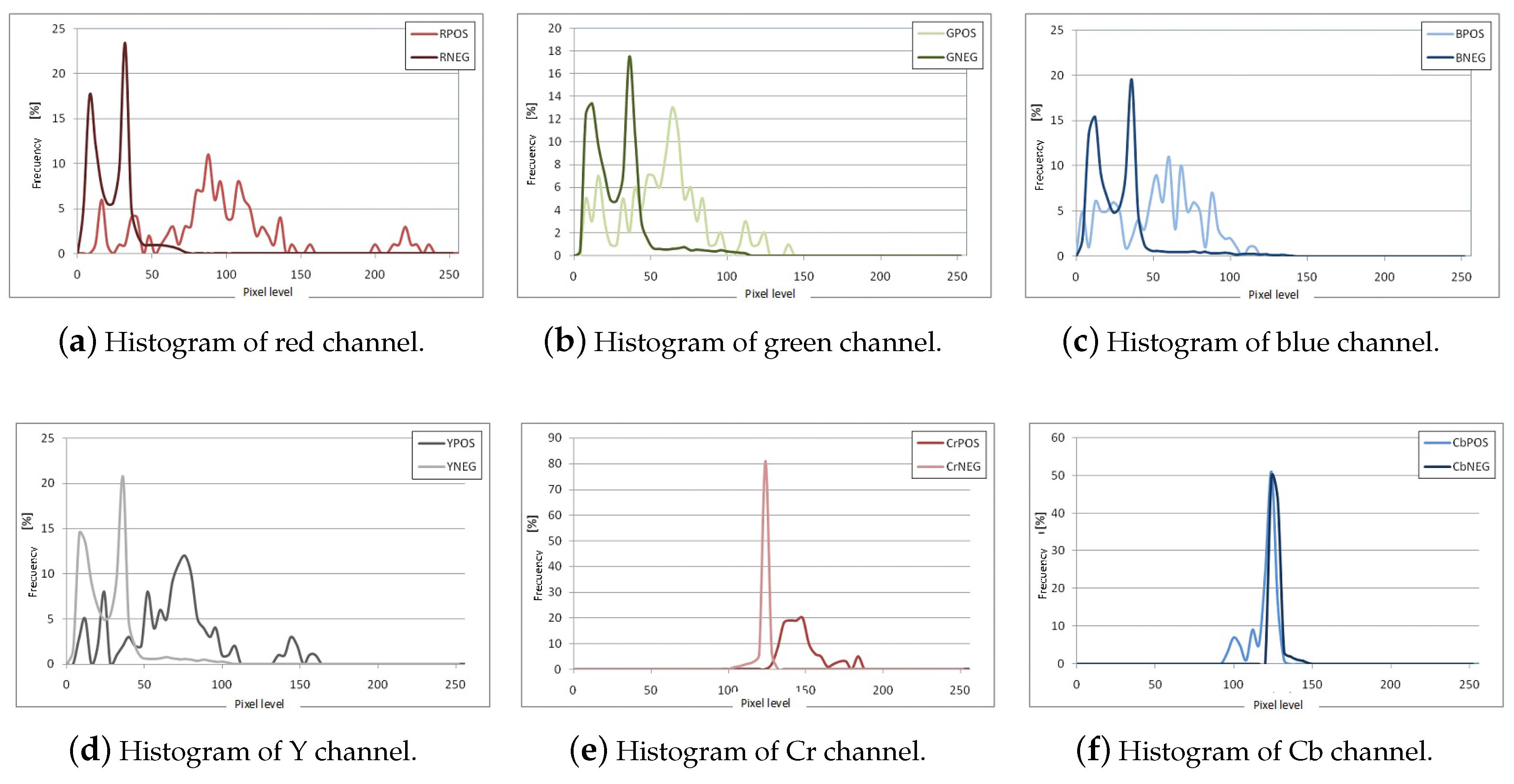
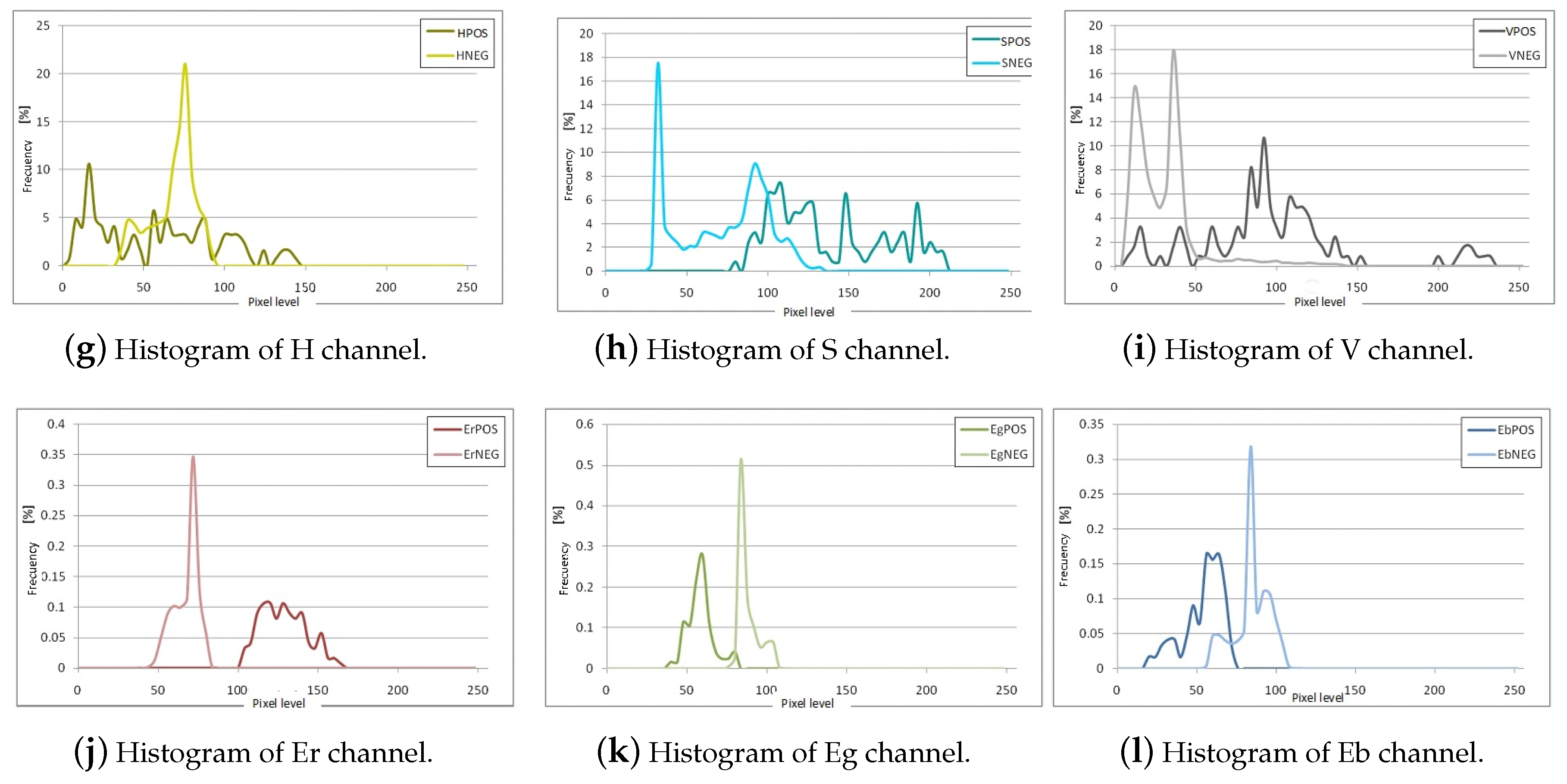
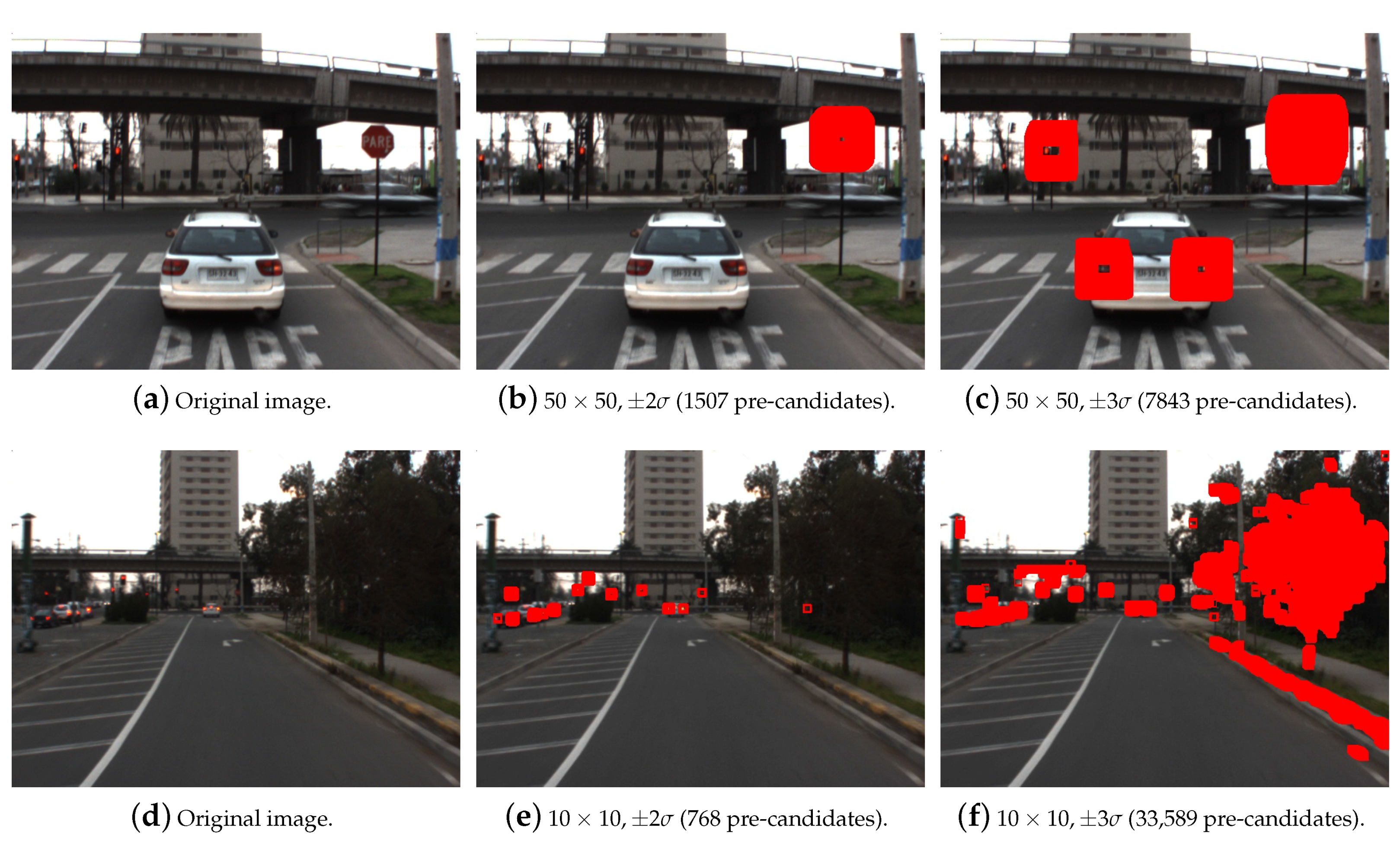
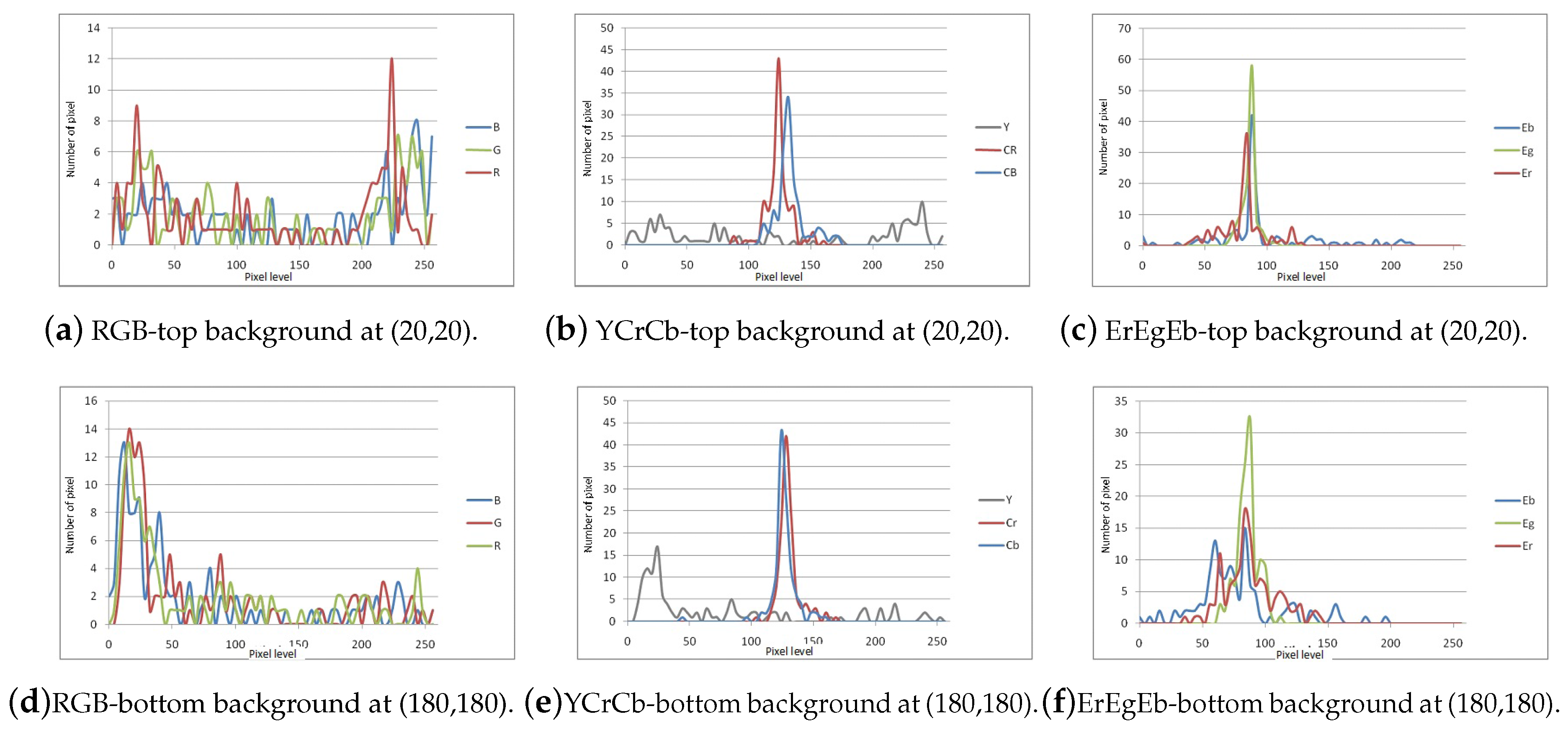
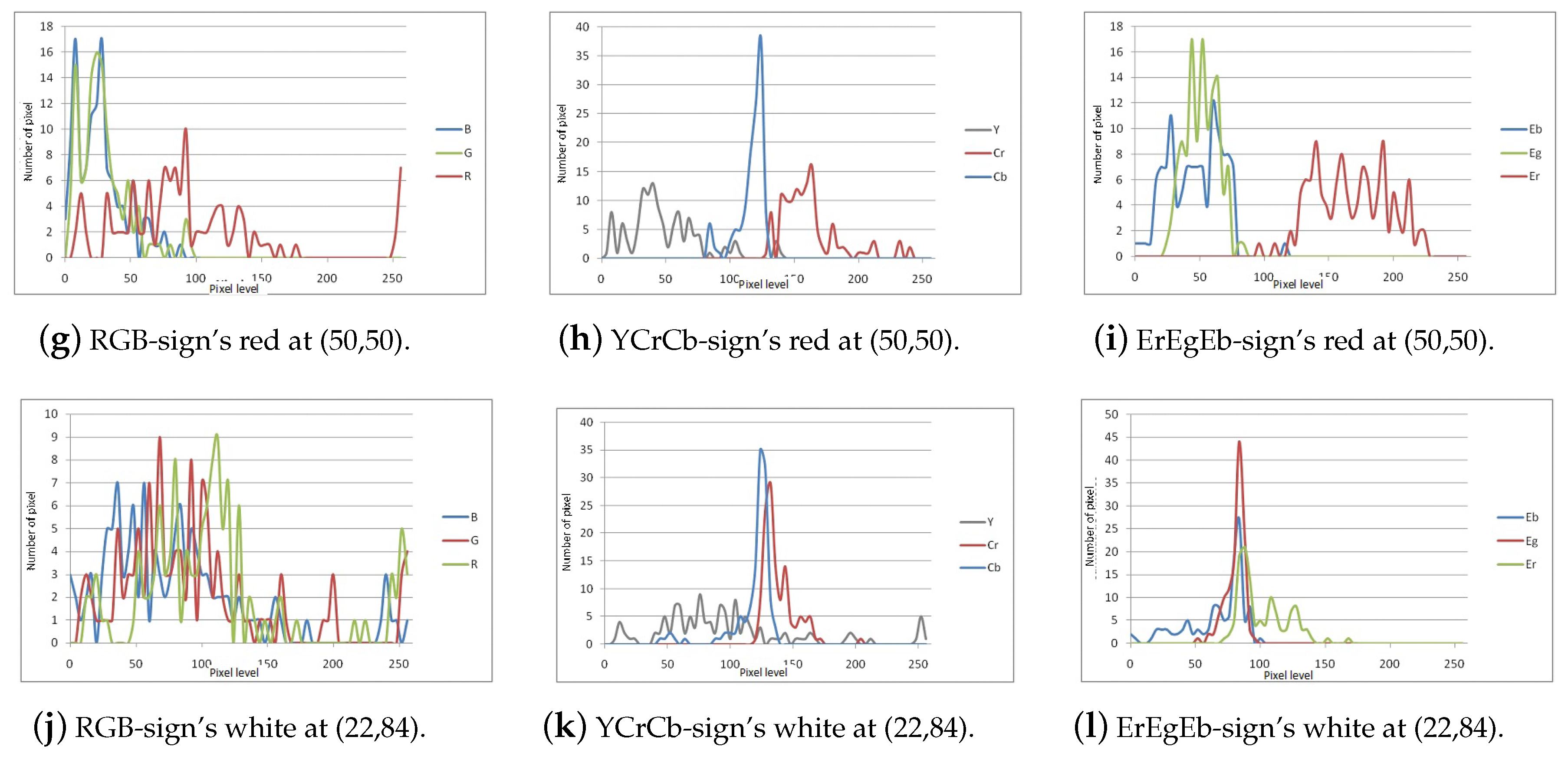
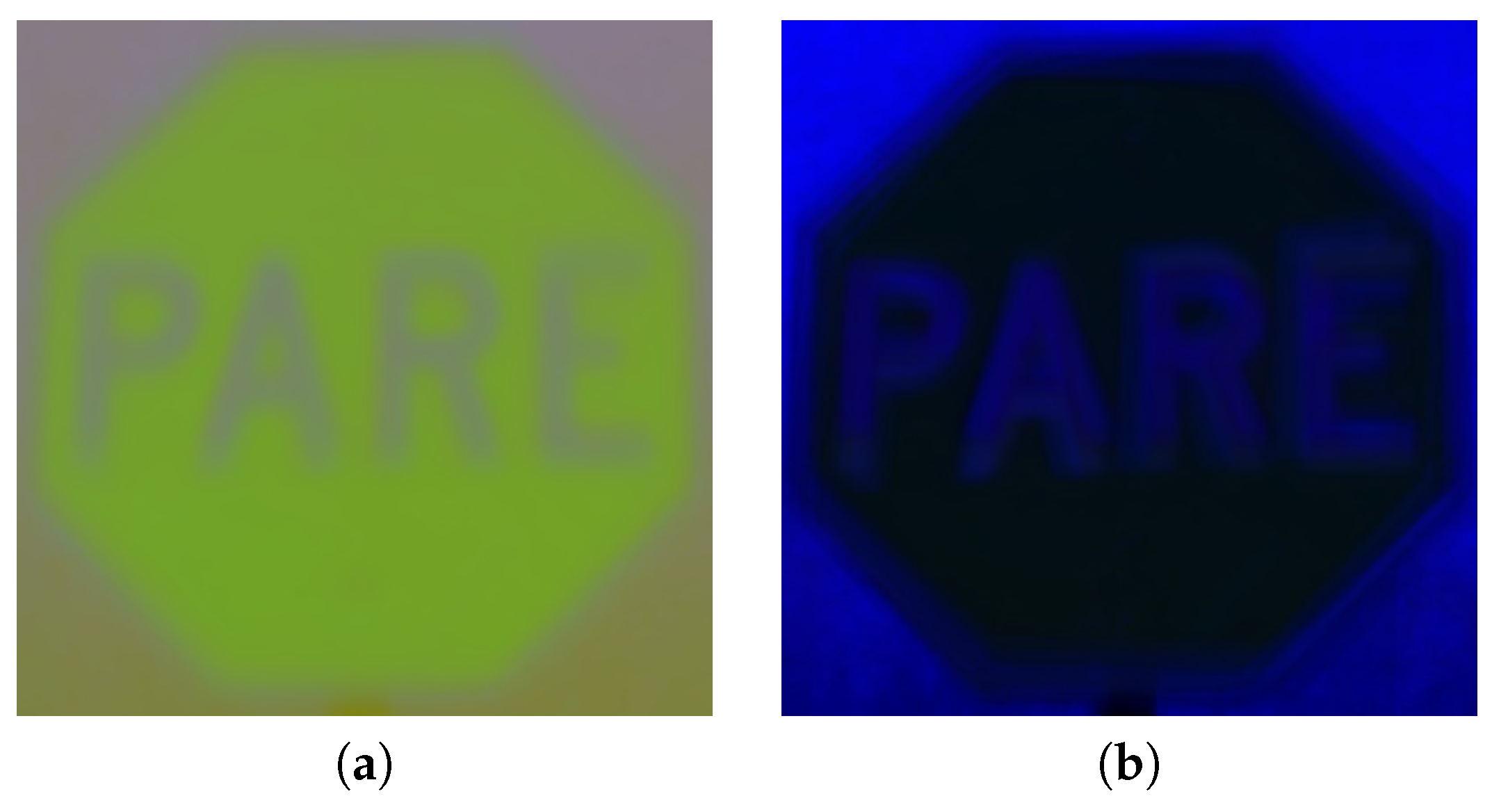
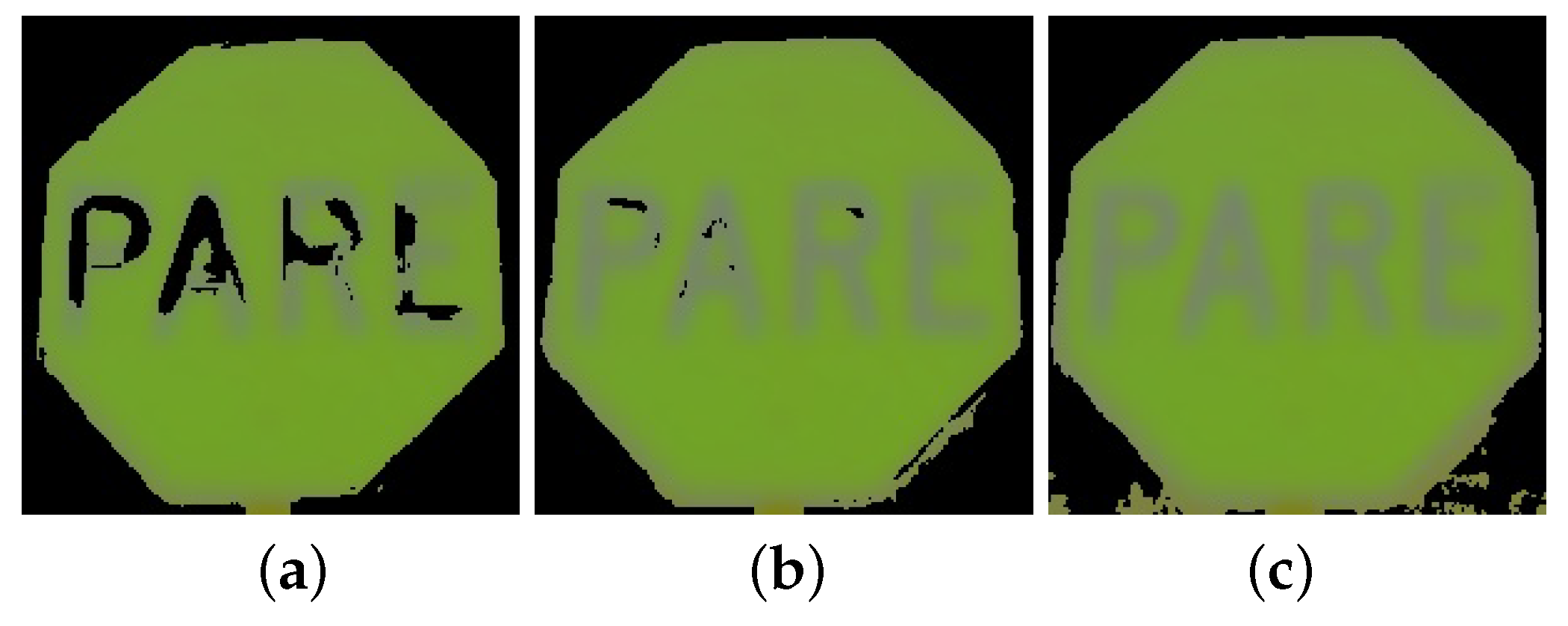
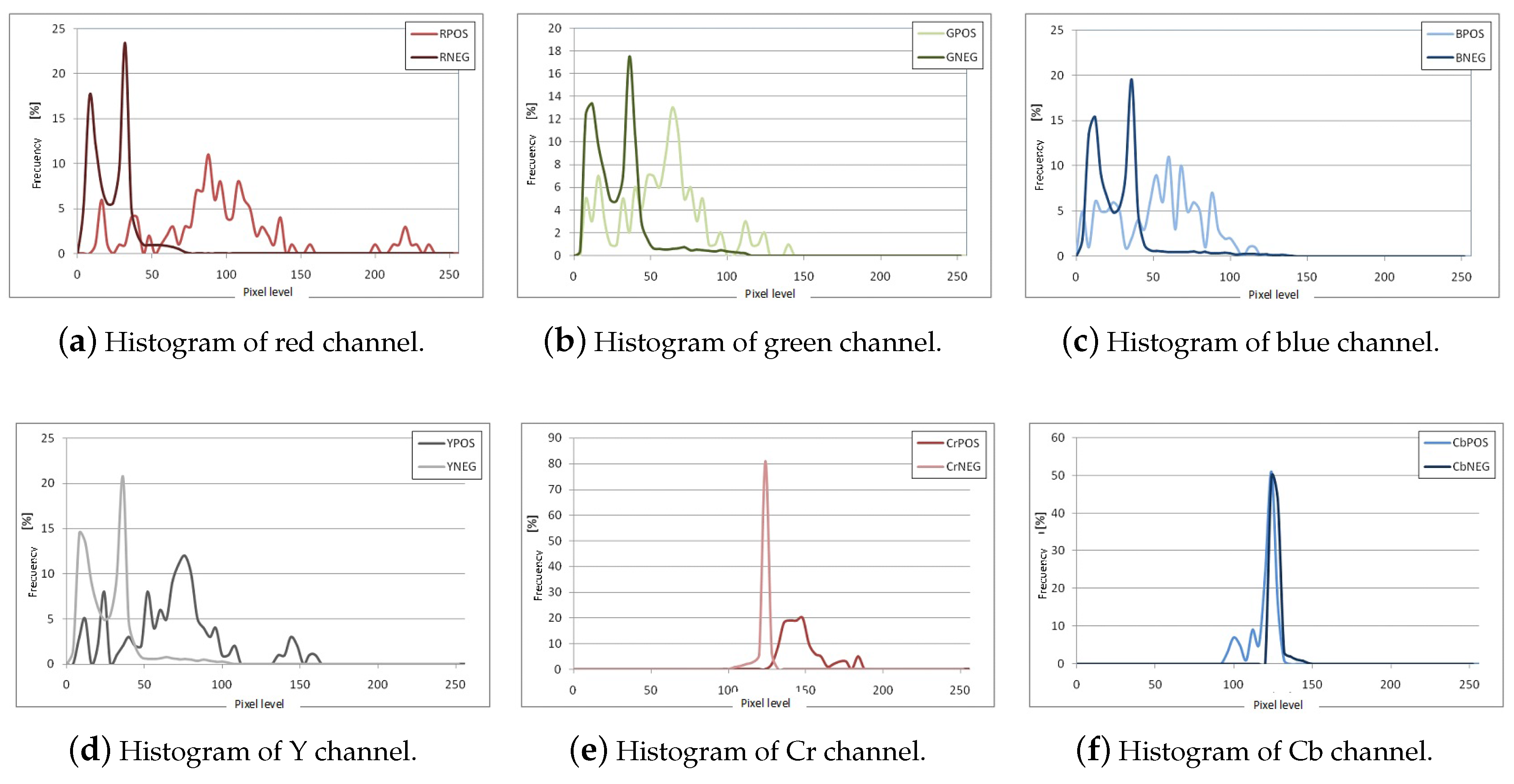
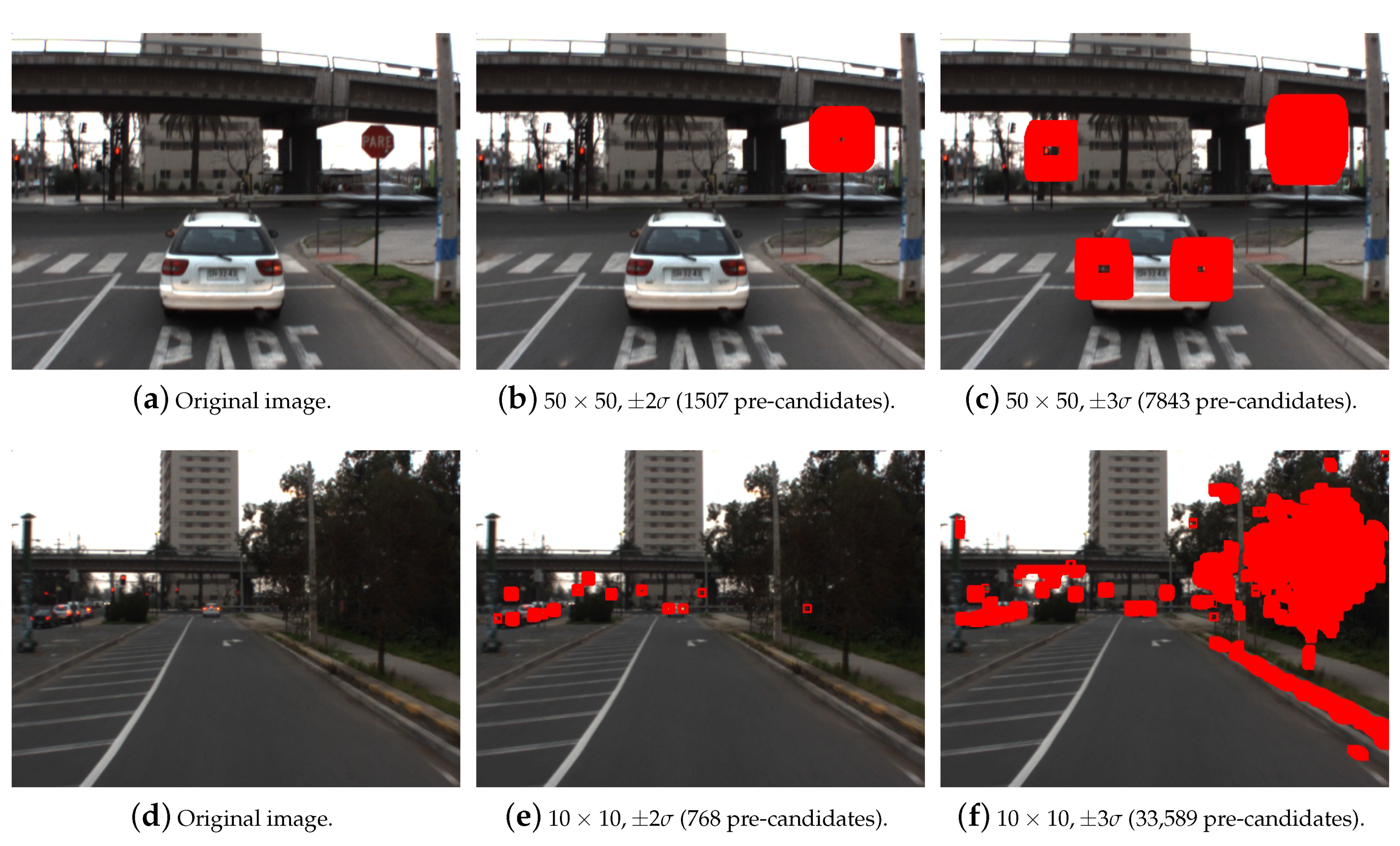
3.1. Chromaticity Filter for the Selection of ROIs
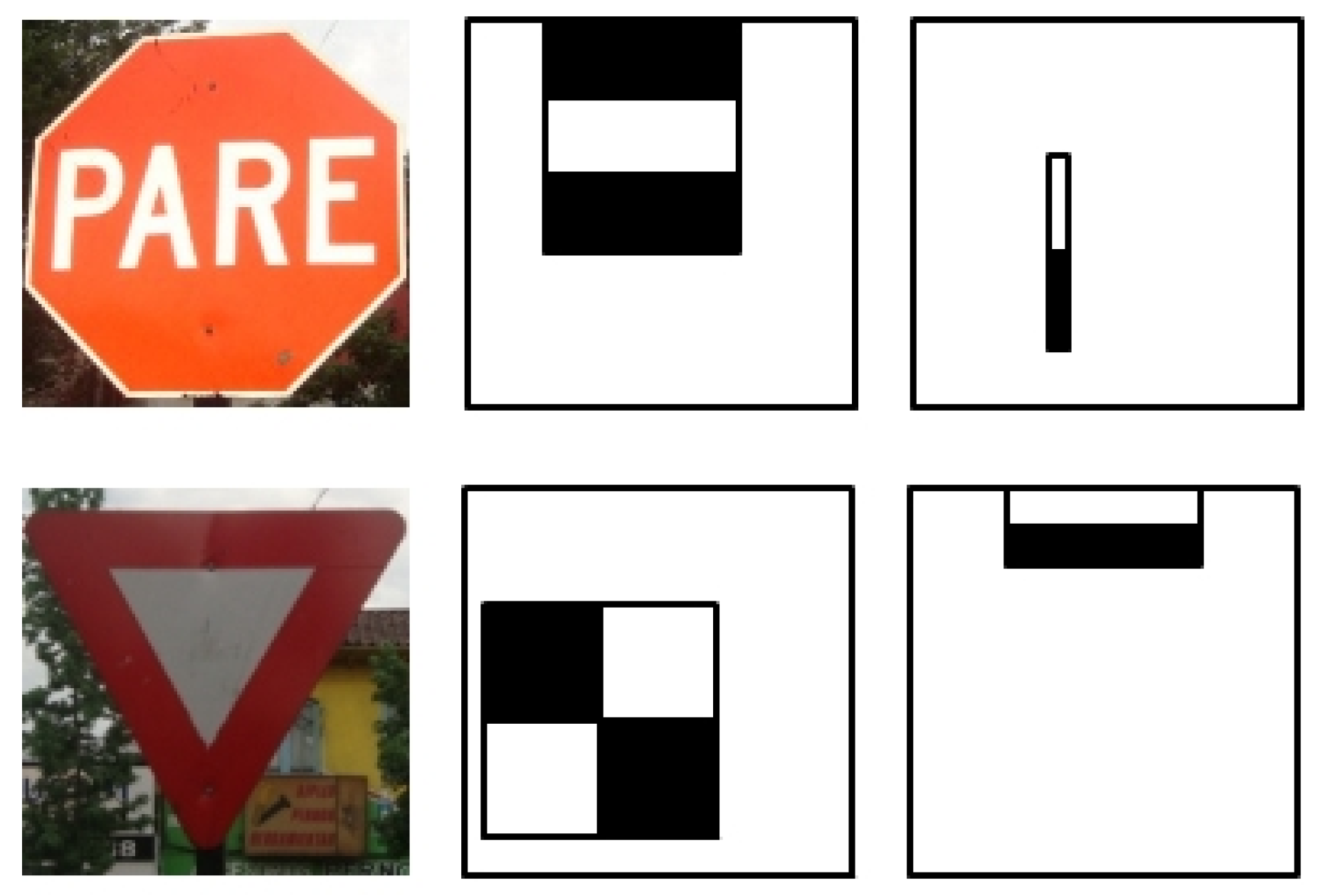
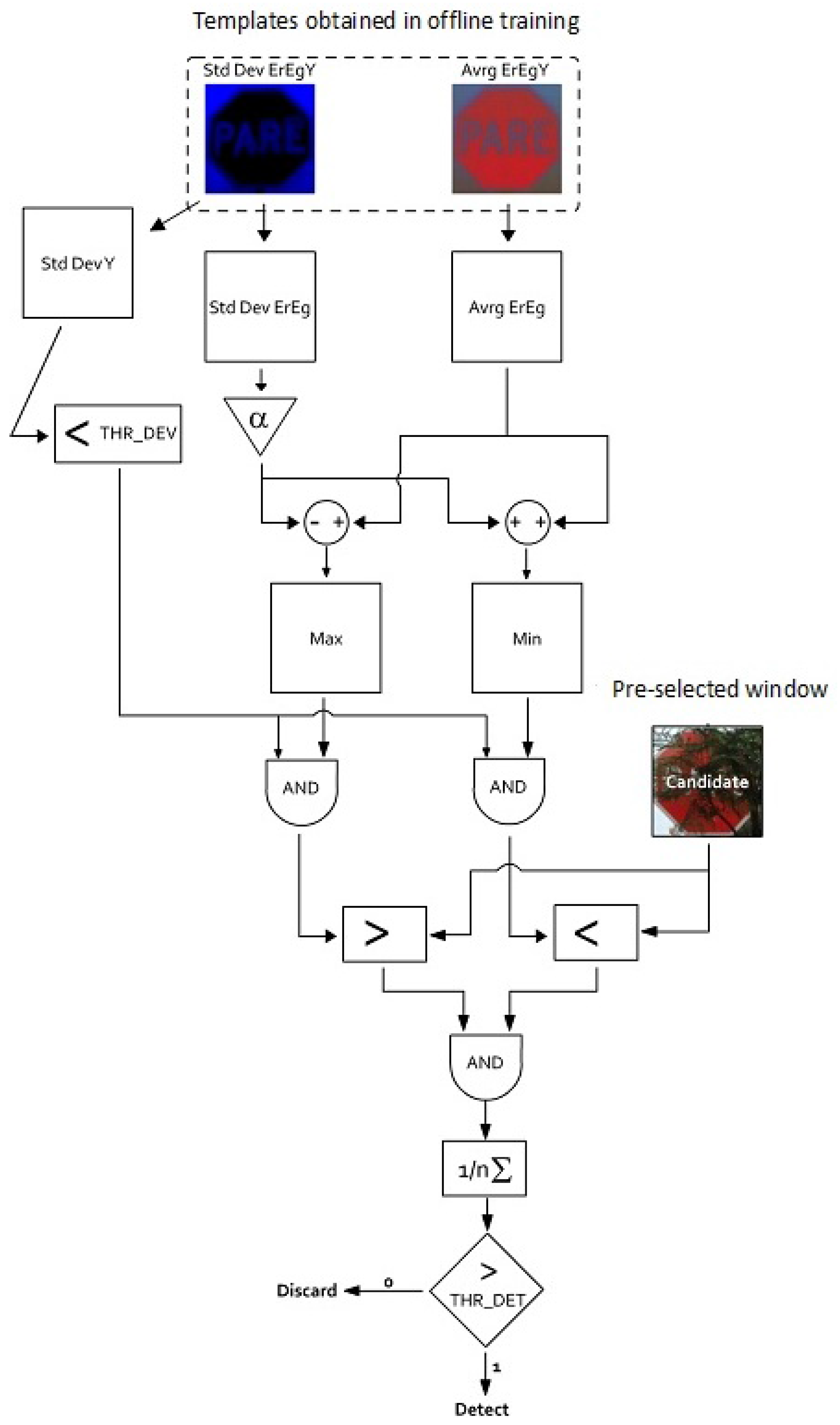
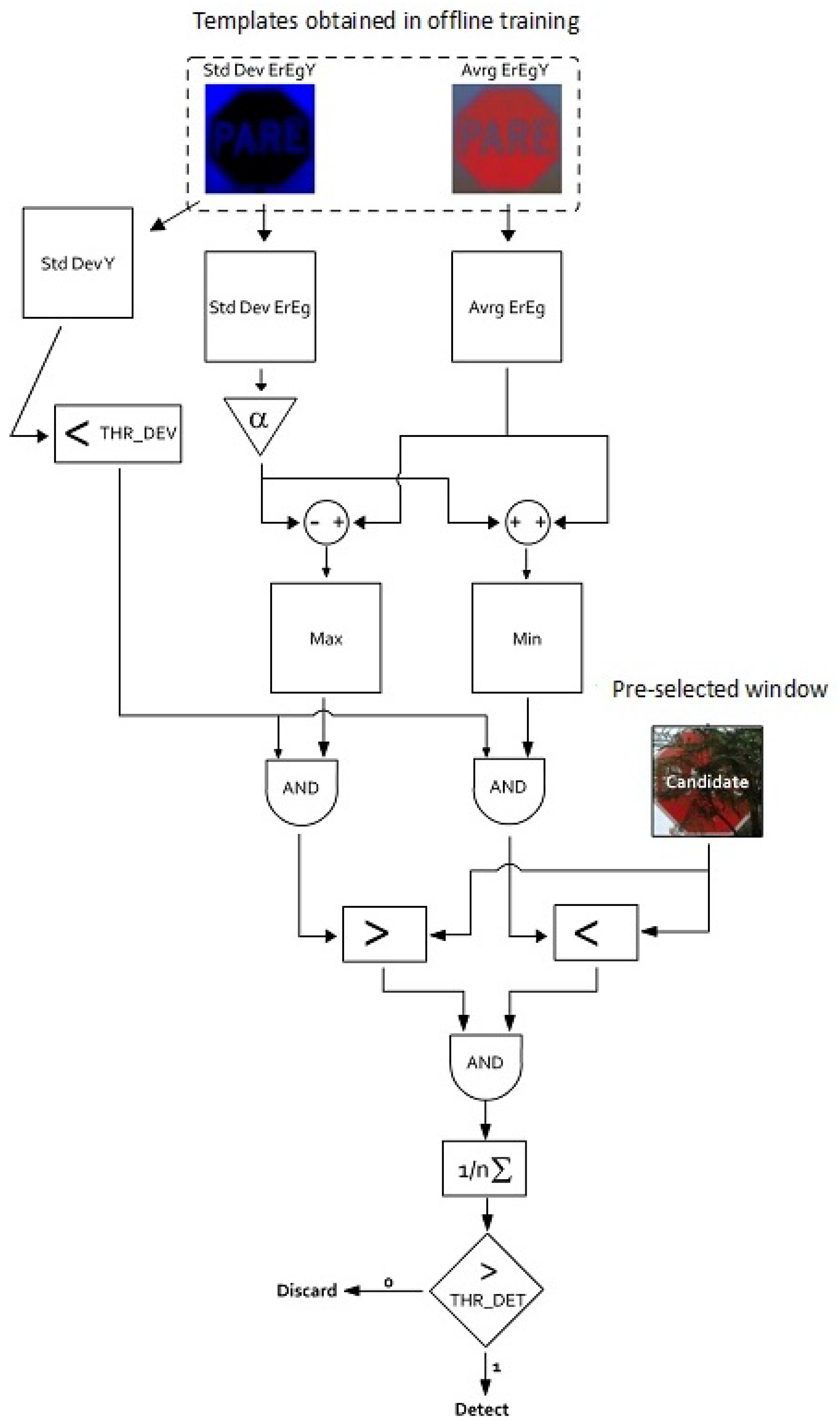
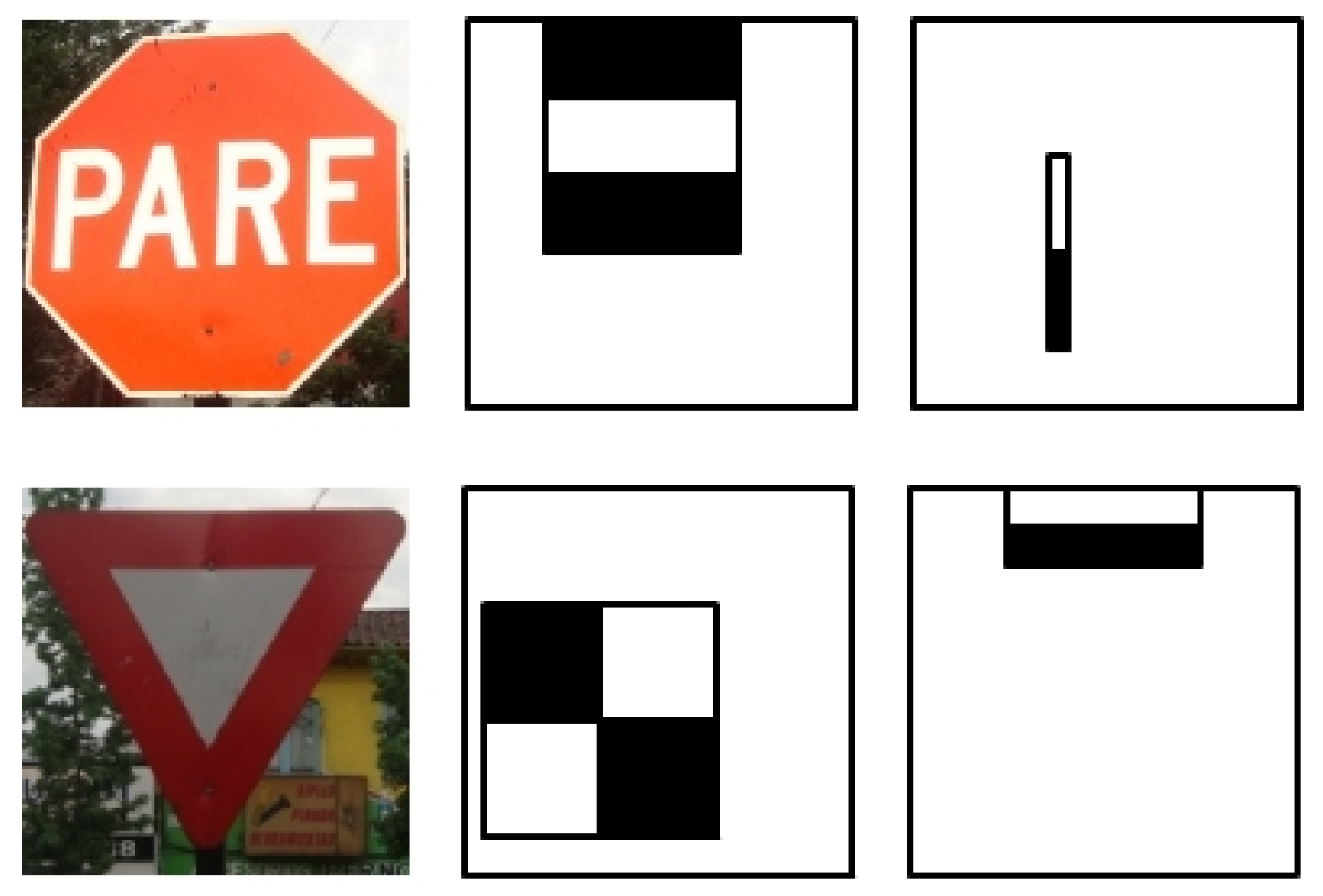
3.2. Recognition of Traffic Signs Based on Statistical Templates
- is a block or subwindow composed of pixel values ,
- is a vector with the pixel chromaticity components Er and Eb, ,
- is the object (sign) class label of subwindow I,
- : the object (sign) class label at every pixel k, in the subwindow I.
| Algorithm 1: Traffic sign recognition algorithm based on statistical templates |
| Input: : candidate image block, : pixel acceptance amplitude parameter, : background pixels discard threshold, : minimal amount of pixels threshold for detection. Output: : binary detection output. // Loading pre-trained masks LoadAverageMask(); LoadStandardDeviationMask(); // Pixel mask discarding corresponding to the background ; // Minimum and maximum accepted masks ; ; // Pixel mask accepted ; // Final decision if SumPixels()/SumPixels() then ; else ; end |
4. Testing Methodology and Experimental Results
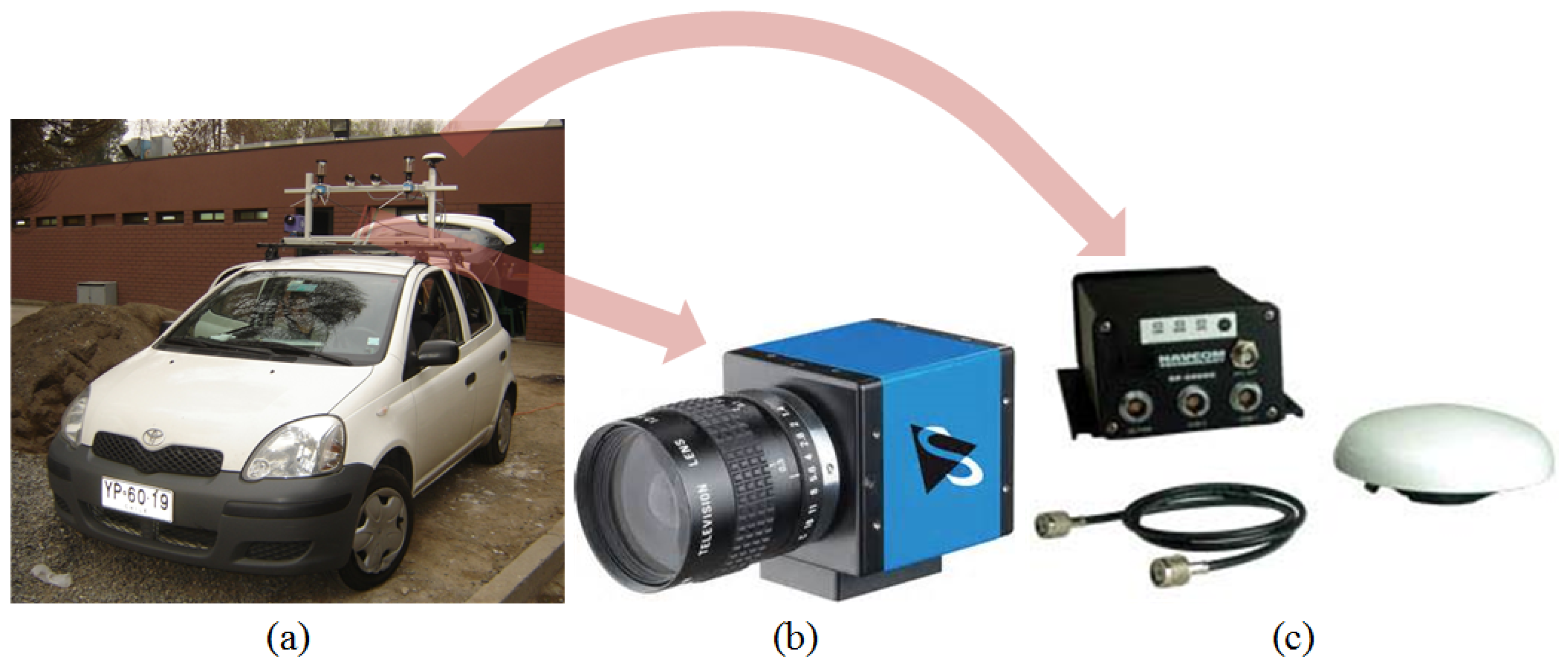
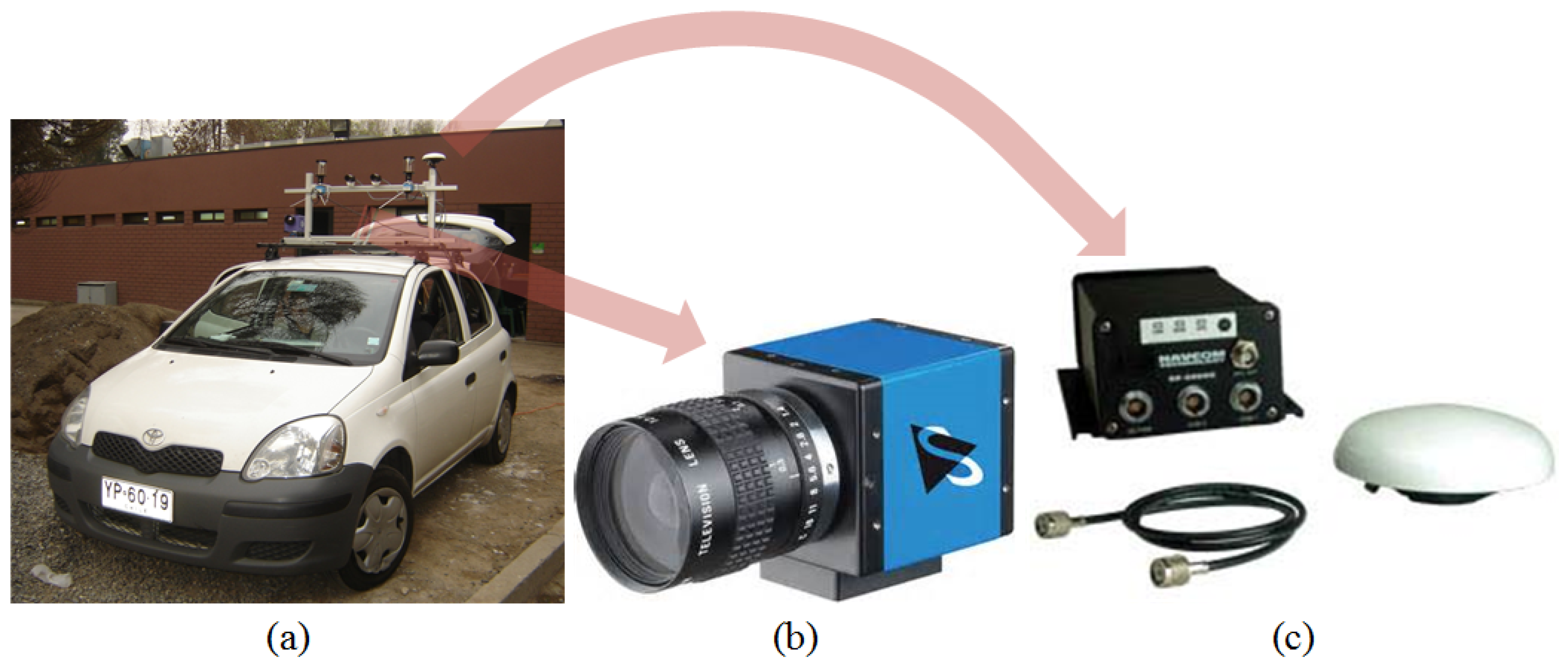
4.1. Perception and Processing Systems
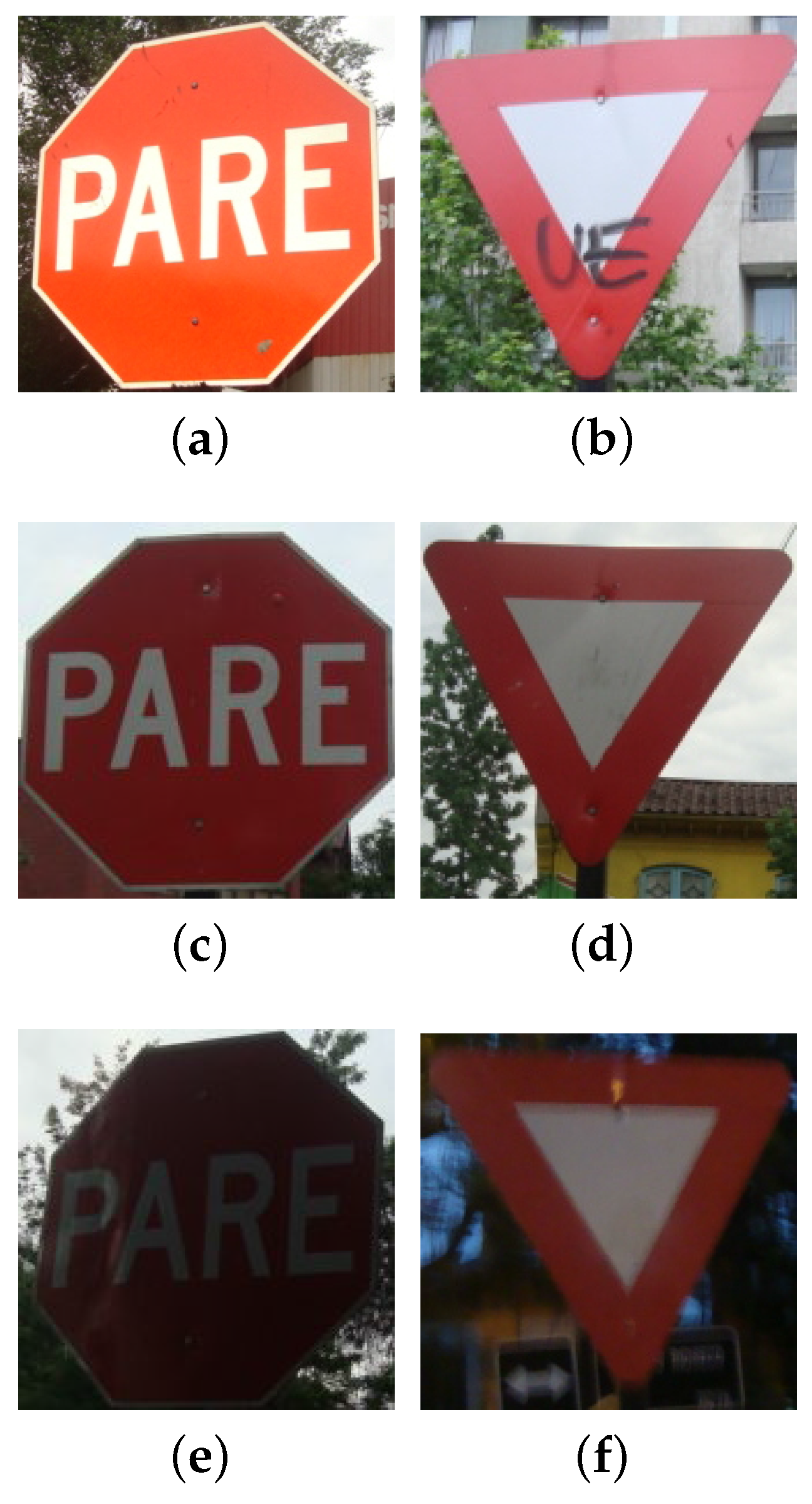
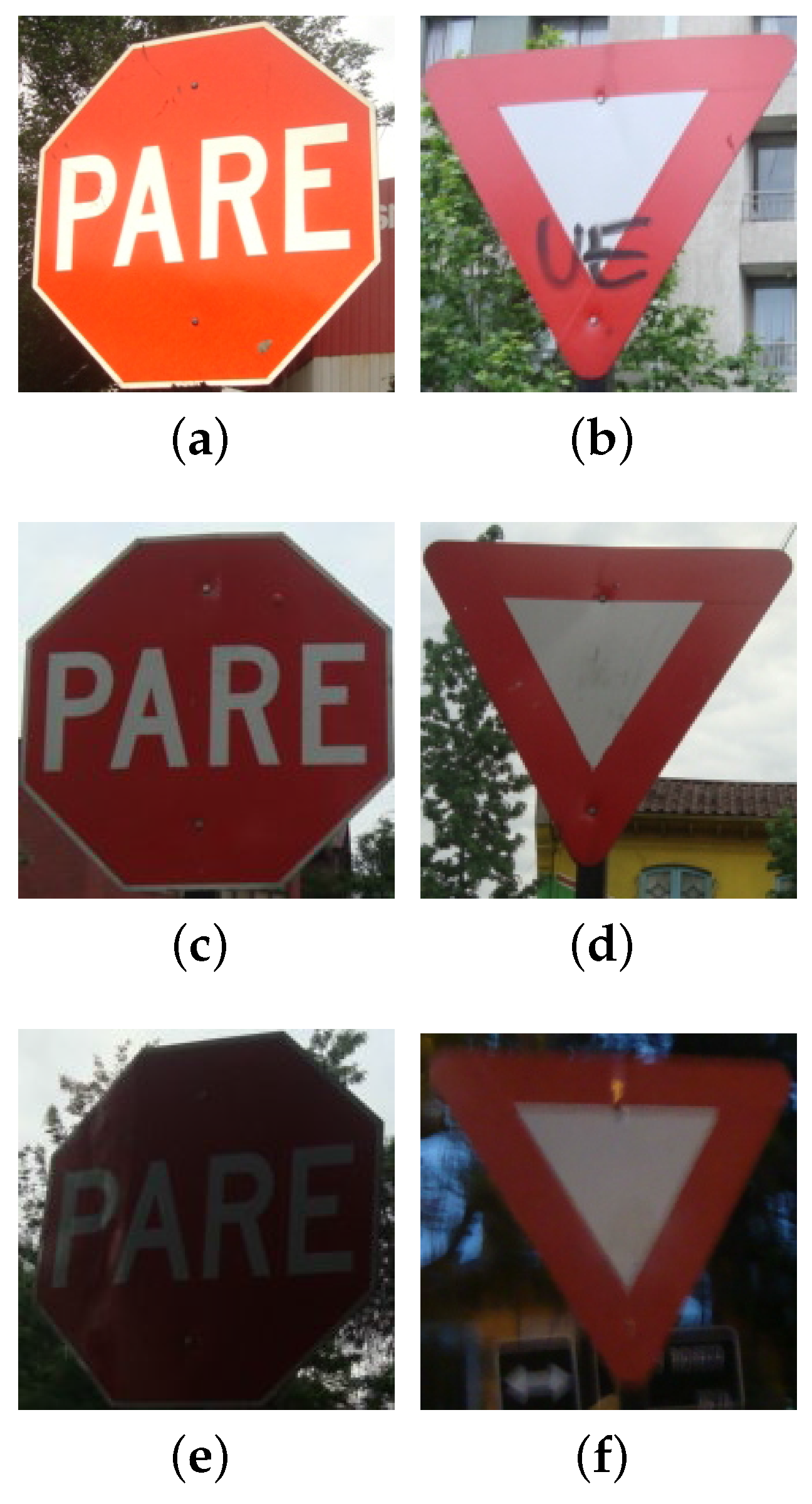
4.2. Training and Validation Dataset
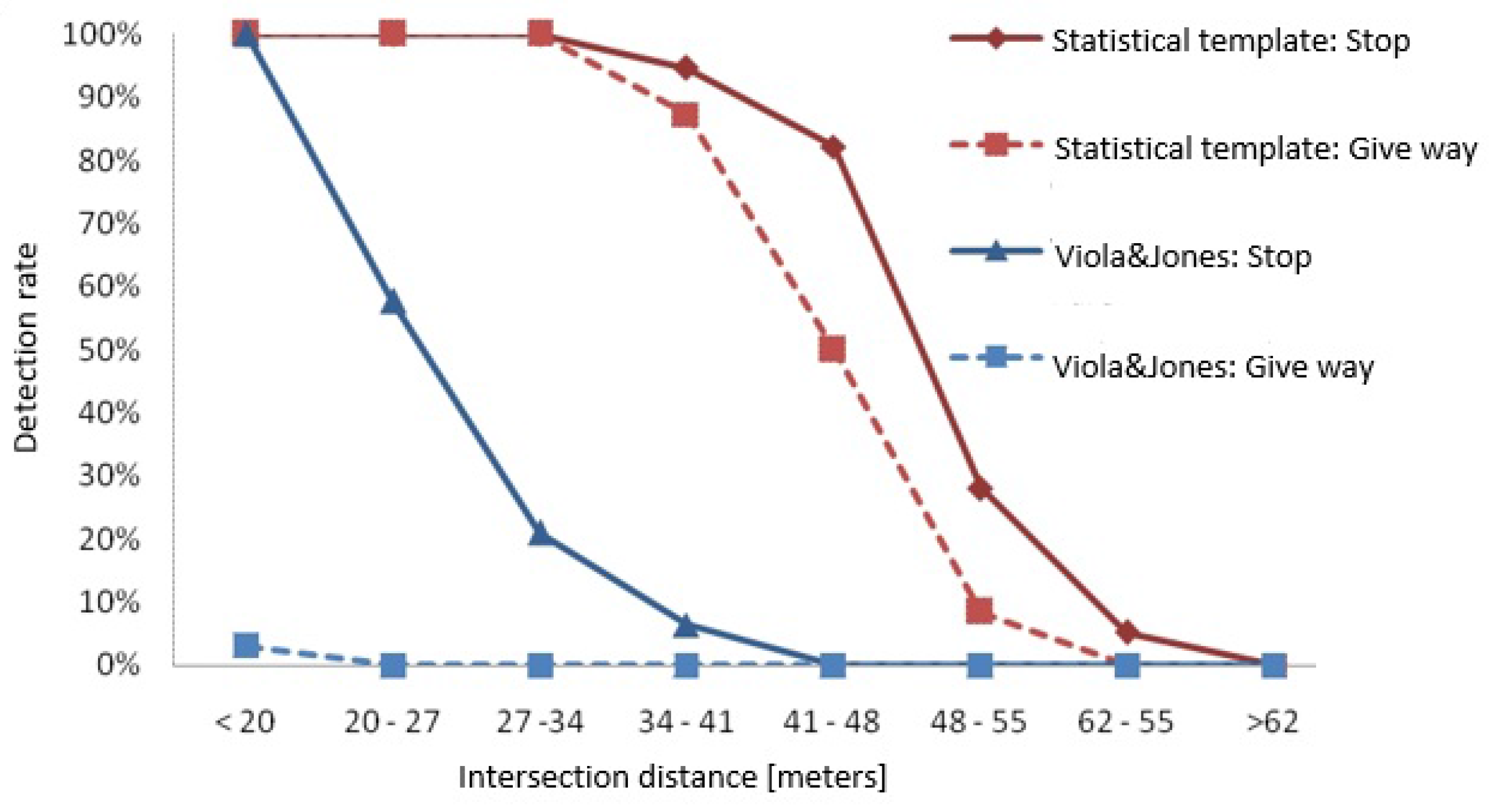
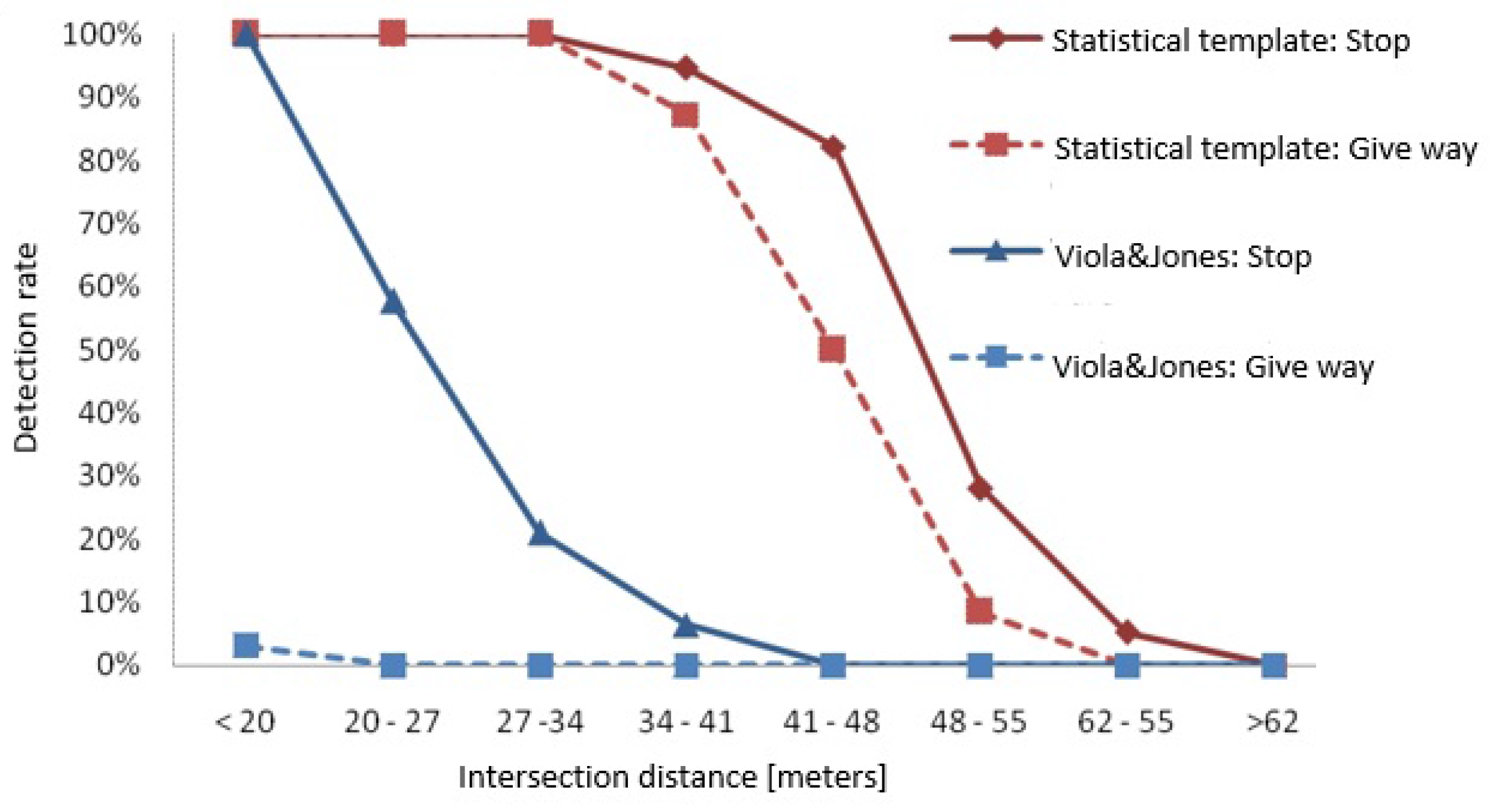
4.3. Experiments Employing the Viola–Jones Method and the Proposed Statistical Template Approach
4.3.1. Viola–Jones Method:
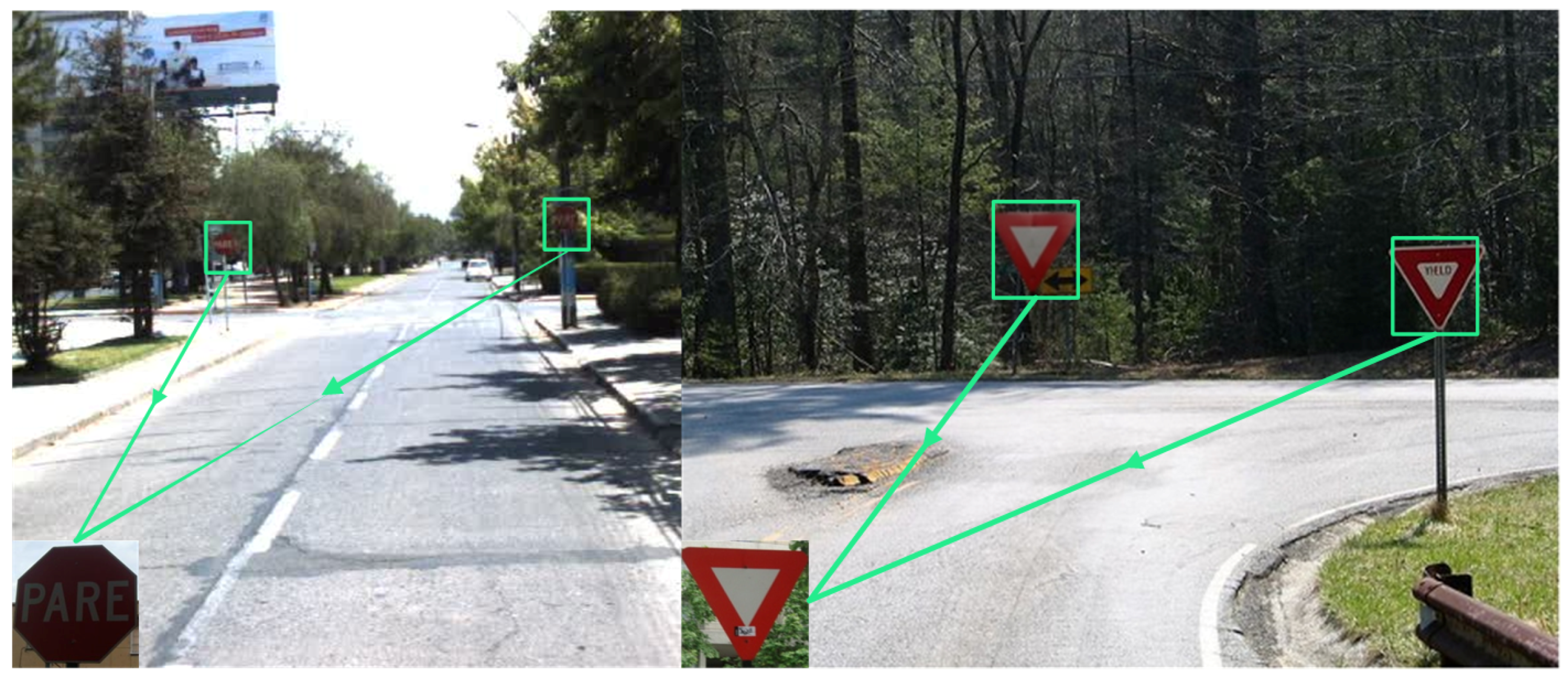
4.3.2. Statistical Template Method:
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
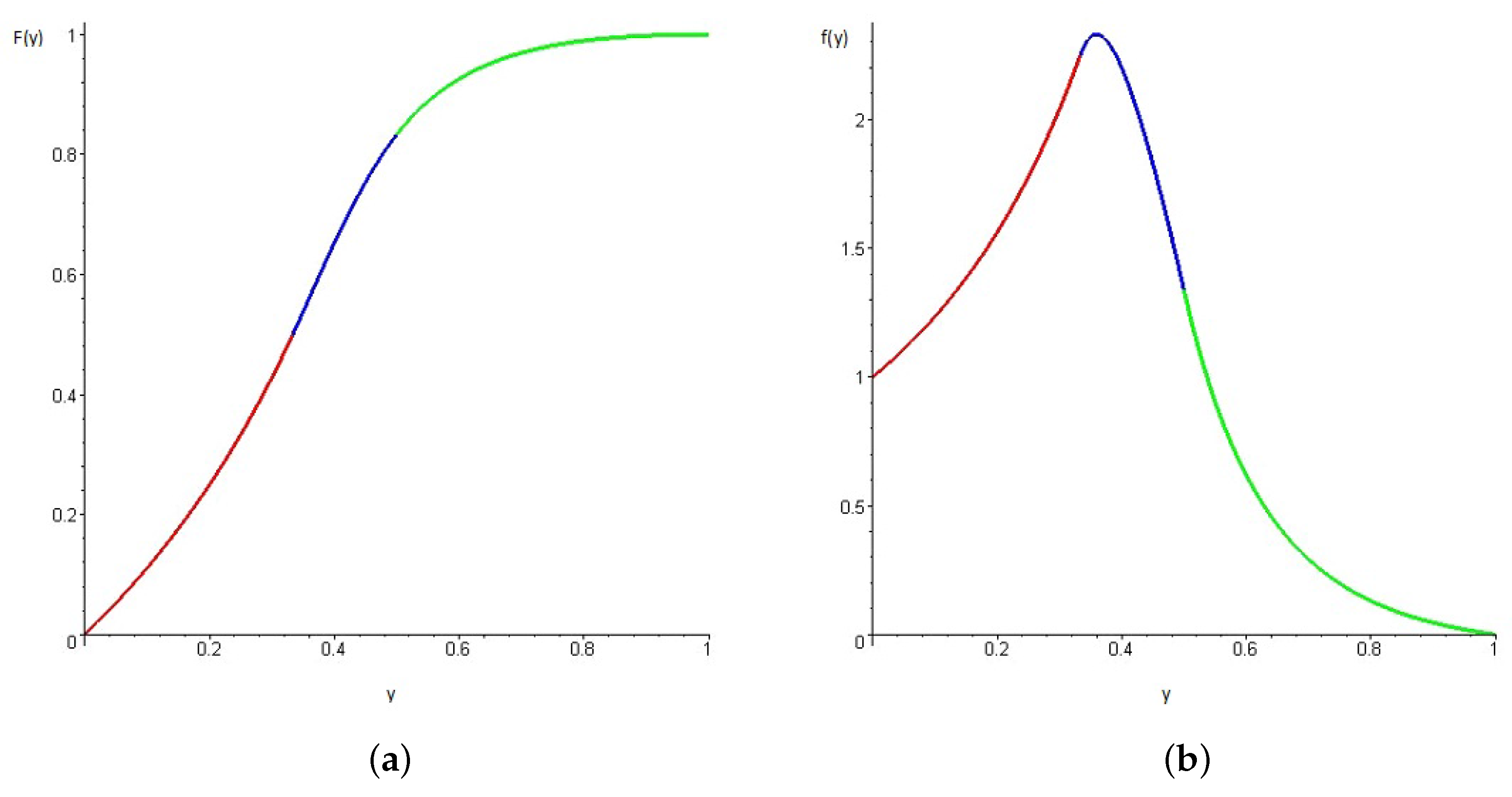
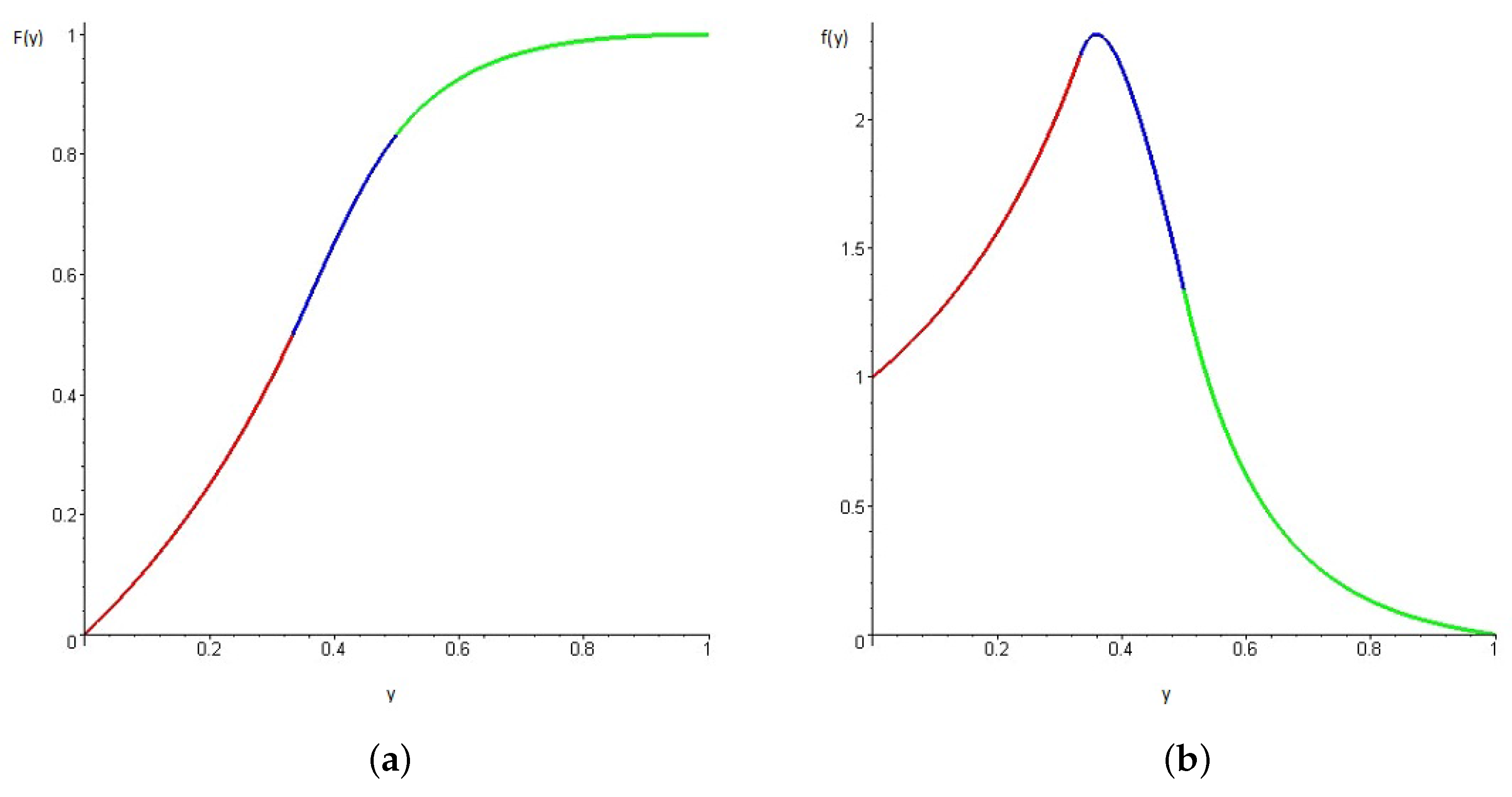
Appendix A. Deduction of the Background Probability Distribution
- Case :
- Case :
- Case :
Appendix B. Traffic Sign Detection by Using the Viola–Jones Method
References
- World Health Organization (WHO). Road Traffic Injuries. Available online: http://www.who.int/violenceinjuryprevention/roadtraffic/en/ (accessed on 24 May 2015).
- World Health Organization (WHO). La OMS y la FIA aúnan Esfuerzos Para Mejorar La Seguridad Vial. Available online: http://www.who.int/mediacentre/news/releases/2003/pr11/es/ (accessed on 24 May 2015).
- World Health Organization (WHO). Lesiones Causadas Por el Tránsito. Available online: http://www.who.int/mediacentre/factsheets/fs358/es/ (accessed on 24 May 2015).
- Fraser, B. Traffic accidents scar Latin America’s roads. Lancet 2005, 366, 703–704. [Google Scholar] [CrossRef]
- Jiménez-Pinto, J.; Torres-Torriti, M. Optical Flow and Driver’s Kinematics Analysis for State of Alert Sensing. Sensors 2013, 13, 4225–4257. [Google Scholar] [CrossRef] [PubMed]
- Tapia-Espinoza, R.; Torres-Torriti, M. Robust Lane Sensing and Departure Warning under Shadows and Occlusions. Sensors 2013, 13, 3270–3298. [Google Scholar] [CrossRef] [PubMed]
- National Highway Traffic Safety Administration (NHTSA). Traffic Fatalities Up Sharply in 2015. Available online: http://www.nhtsa.gov/ (accessed on 24 May 2015).
- Mesriani Law Group. Accidents Caused by Dangerous Intersections. Available online: http://www.hg.org/article.asp?id=7652 (accessed on 24 May 2015).
- Wang, Y.; Nihan, N.L. Quantitative Analysis on Angle-Accident Risk at Signalized Intersections; Research Associate Department of Civil Engineering University of Washington: Seattle, WA, USA, 2015. [Google Scholar]
- Agencia Nacional de Tránsito del Ecuador. Estadísticas de Transporte Terrestre Y Seguridad Vial. Available online: http://www.ant.gob.ec/ (accessed on 24 May 2015).
- CONASET. Observatorio de Datos De Accidentes. Available online: https://estadconaset.mtt.gob.cl/ (accessed on 24 May 2015).
- Nie, Y.; Chen, Q.; Chen, T.; Sun, Z.; Dai, B. Camera and lidar fusion for road intersection detection. In Proceedings of the IEEE Symposium on Electrical and Electronics Engineering, Kuala Lumpur, Malaysia, 24–27 June 2012; pp. 273–276. [Google Scholar]
- Horgan, J.; Hughes, C.; McDonald, J.; Yogamani, S. Vision-Based Driver Assistance Systems: Survey, Taxonomy and Advances. In Proceedings of the IEEE 18th International Conference on Intelligent Transportation Systems (ITSC 2015), Las Palmas de Gran Canaria, Spain, 15–18 September 2015; pp. 2032–2039. [Google Scholar]
- Viola, P.; Jones, M. Rapid object detection using a boosted cascade of simple features. In Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2001), Kauai, HI, USA, 8–14 December 2001; Volume 1, pp. I-511–I-518. [Google Scholar]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; Volume 1, pp. 886–893. [Google Scholar]
- Greenhalgh, J.; Mirmehdi, M. Real-Time Detection and Recognition of Road Traffic Signs. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1498–1506. [Google Scholar] [CrossRef]
- Salti, S.; Petrelli, A.; Tombari, F.; Fioraio, N.; DiStefano, L. Traffic sign detection via interest region extraction. Pattern Recogn. 2015, 48, 1039–1049. [Google Scholar] [CrossRef]
- Li, H.; Sun, F.; Liu, L.; Wang, L. A novel traffic sign detection method via color segmentation and robust shape matching. Neurocomputing 2015, 169, 77–88. [Google Scholar] [CrossRef]
- Zaklouta, F.; Stanciulescu, B. Real-Time Traffic-Sign Recognition Using Tree Classifiers. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1507–1514. [Google Scholar] [CrossRef]
- Zaklouta, F.; Stanciulescu, B. Real-time traffic sign recognition in three stages. Robot. Auton. Syst. 2014, 62, 16–24. [Google Scholar] [CrossRef]
- Mogelmose, A.; Trivedi, M.M.; Moeslund, T.B. Vision-Based Traffic Sign Detection and Analysis for Intelligent Driver Assistance Systems: Perspectives and Survey. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1484–1497. [Google Scholar] [CrossRef]
- Carrasco, J. Advanced Driver Assistance System Based on Computer Vision Using Detection, Recognition and Tracking of Road Signs. Ph.D. Thesis, Laboratorio de Sistemas Inteligentes, Universidad Carlos III de Madrid, Madrid, Spain, 2009. [Google Scholar]
- Fleyeh, H.; Biswas, R.; Davami, E. Traffic sign detection based on AdaBoost color segmentation and SVM classification. In Proceedings of the 2013 IEEE EUROCON, Zagreb, Croatia, 1–4 July 2013; pp. 2005–2010. [Google Scholar]
- Han, Y.; Virupakshappa, K.; Oruklu, E. Robust traffic sign recognition with feature extraction and k-NN classification methods. In Proceedings of the 2015 IEEE International Conference on Electro/Information Technology (EIT), Dekalb, IL, USA, 21–23 May 2015; pp. 484–488. [Google Scholar]
- Hastie, T.; Tibshirani, R.; Friedman, J. The Elements of Statistical Learning, 2nd ed.; Springer: New York, NY, USA, 2009. [Google Scholar]
- Lillo, J.; Mora, I.; Figuera, C.; Rojo, J.L. Traffic sign segmentation and classification using statistical learning methods. Neurocomputing 2015, 1, 286–299. [Google Scholar] [CrossRef]
- Keser, T.; Kramar, G.; Nozica, D. Traffic Signs Shape Recognition Based on Contour Descriptor Analysis. In Proceedings of the IEEE International Conference on Smart Systems and Technologies (SST), Osijek, Croatia, 12–14 October 2016. [Google Scholar]
- Zhu, Z.; Liang, D.; Zhang, S.; Huang, X.; Li, B.; Hu, S. Traffic-Sign Detection and Classification in the Wild. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 27–30 June 2016. [Google Scholar]
- Huang, Z.; Yu, Y.; Gu, J. A Novel Method for Traffic Sign Recognition based on Extreme Learning Machine. In Proceedings of the IEEE 11th World Congress on Intelligent Control and Automation (WCICA), Shenyang, China, 29 June–4 July 2014; pp. 1451–1456. [Google Scholar]
- Bay, H.; Ess, A.; Tuytelaars, T.; Gool, L.V. Speeded-Up Robust Features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Lau, M.M.; Lim, K.H.; Gopalai, A.A. Malaysia Traffic Sign Recognitio on with Convolutional Neural Network. In Proceedings of the IEEE International Conference on Digital Signal Processing (DSP), Singapore, 21–24 July 2015; pp. 1006–1010. [Google Scholar]
- Perez-Perez, S.E.; Gonzalez-Reyna, S.E.; Ledesma-Orozco, S.E.; Avina-Cervantes, J.G. Principal component analysis for speed limit Traffic Sign Recognition. In Proceedings of the 2013 IEEE International Autumn Meeting on Power Electronics and Computing (ROPEC), Morelia, Mexico, 13–15 November 2013; pp. 1–5. [Google Scholar]
- Jung, S.; Lee, U.; Jung, J.; Shim, D.H. Real-time Traffic Sign Recognition system with deep convolutional neural network. In Proceedings of the Ubiquitous Robots and Ambient Intelligence (URAI), Xian, China, 19–22 August 2016. [Google Scholar]
- Zeng, Y.; Xu, X.; Shen, D.; Fang, Y.; Xiao, Z. Traffic Sign Recognition Using Kernel Extreme Learning Machines With Deep Perceptual Features. IEEE Trans. Intell. Transp. Syst. 2016, PP, 1–7. [Google Scholar] [CrossRef]
- Li, C.; Yang, C. The research on traffic sign recognition based on deep learning. In Proceedings of the 2016 16th IEEE International Symposium on Communications and Information Technologies (ISCIT), Qingdao, China, 26–28 September 2016; pp. 156–161. [Google Scholar]
- Nguyen, B.T.; Shim, J.; Kim, J.K. Fast Traffic Sign Detection under Challenging Conditions. In Proceedings of the 2014 International Conference on Audio, Language and Image Processing (ICALIP), Shanghai, China, 7–9 July 2014; pp. 749–752. [Google Scholar]
- Convention on Road Signs and Signals. Available online: http://www.unece.org/fileadmin/DAM/trans/conventn/signalse.pdf (accessed on 24 May 2015).
- Flores, M.; Armingol, M.; Escalera de la, A. New probability models for face detection and tracking in color images. In Proceedings of the 2007 IEEE International Symposium on Intelligent Signal Processing (WISP 2007), Alcala de Henares, Spain, 3–5 October 2007; pp. 1–6. [Google Scholar]
- Jain, A.K.; Li, S.Z. Handbook of Face Recognition; Springer-Verlag Inc.: Secaucus, NJ, USA, 2005; p. 117. [Google Scholar]
- Viola, P.; Jones, M. Robust real-time face detection. In Proceedings of the Eighth IEEE International Conference on Computer Vision (ICCV 2001), Vancouver, BC, Canada, 7–14 July 2001. [Google Scholar]
- Duda, R.; Hart, P.; Stork, D. Pattern Classification; Wiley: New York, NY, USA, 2001; p. 42. [Google Scholar]
- Casella, G.; Berger, R. Statistical Inference; Duxbury: Pacific Grove, CA, USA, 2002; p. 207. [Google Scholar]
- Heston, T.F. Standardizing predictive values in diagnostic imaging research. J. Magn. Reson. Imaging 2011, 2, 506–507. [Google Scholar] [CrossRef] [PubMed]
- Robotics and Automation Laboratory, School of Engineering, Pontificia Universidad Católica de Chile. Available online: http://ral.ing.puc.cl/datasets/intersection/index.htm (accessed on 24 May 2015).
- Viola, P.A.; Jones, M.J.; Snow, D. Detecting pedestrians using patterns of motion and appearance. Int. J. Comput. Vis. 2005, 63, 153–161. [Google Scholar] [CrossRef]
- Flores, M. Sistema Avanzado de Asistencia a la Conducción Mediante Visión por Computador para la Detección de la Somnolencia. Ph.D. Thesis, Laboratorio de Sistemas Inteligentes, Universidad Carlos III de Madrid, Madrid, Spain, 2009. [Google Scholar]
- Houben, S.; Stallkamp, J.; Salmen, J.; Schlipsing, M.; Igel, C. Detection of Traffic Signs in Real-World Images: The German Traffic Sign Detection Benchmark. In Proceedings of the IEEE International Joint Conference on Neural Networks (IJCNN), Dallas, TX, USA, 4–9 August 2013; pp. 205–216. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distance to the Intersection [mt] | Yield % | Stop % |
|---|---|---|
| >62 | ||
| 62–55 | ||
| 55–48 | ||
| 48–41 | ||
| 41–34 | ||
| 34–27 | ||
| 27–20 | ||
| <20 |
| Method | Yield | Stop |
|---|---|---|
| Viola–Jones | 0.006 | 0.0 |
| Statistical template | 0.036 | 0.069 |
| Distance to the Intersection [mt] | Yield % | Stop % |
|---|---|---|
| >62 | ||
| 62–55 | ||
| 55–48 | ||
| 48–41 | ||
| 41–34 | ||
| 34–27 | ||
| 27–20 | ||
| <20 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Villalón-Sepúlveda, G.; Torres-Torriti, M.; Flores-Calero, M. Traffic Sign Detection System for Locating Road Intersections and Roundabouts: The Chilean Case. Sensors 2017, 17, 1207. https://doi.org/10.3390/s17061207
Villalón-Sepúlveda G, Torres-Torriti M, Flores-Calero M. Traffic Sign Detection System for Locating Road Intersections and Roundabouts: The Chilean Case. Sensors. 2017; 17(6):1207. https://doi.org/10.3390/s17061207
Chicago/Turabian StyleVillalón-Sepúlveda, Gabriel, Miguel Torres-Torriti, and Marco Flores-Calero. 2017. "Traffic Sign Detection System for Locating Road Intersections and Roundabouts: The Chilean Case" Sensors 17, no. 6: 1207. https://doi.org/10.3390/s17061207
APA StyleVillalón-Sepúlveda, G., Torres-Torriti, M., & Flores-Calero, M. (2017). Traffic Sign Detection System for Locating Road Intersections and Roundabouts: The Chilean Case. Sensors, 17(6), 1207. https://doi.org/10.3390/s17061207