
Sensors and Actuators on Determining Parameters for Being Considered in Selection of Elastomers for Biomimetic Hands



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
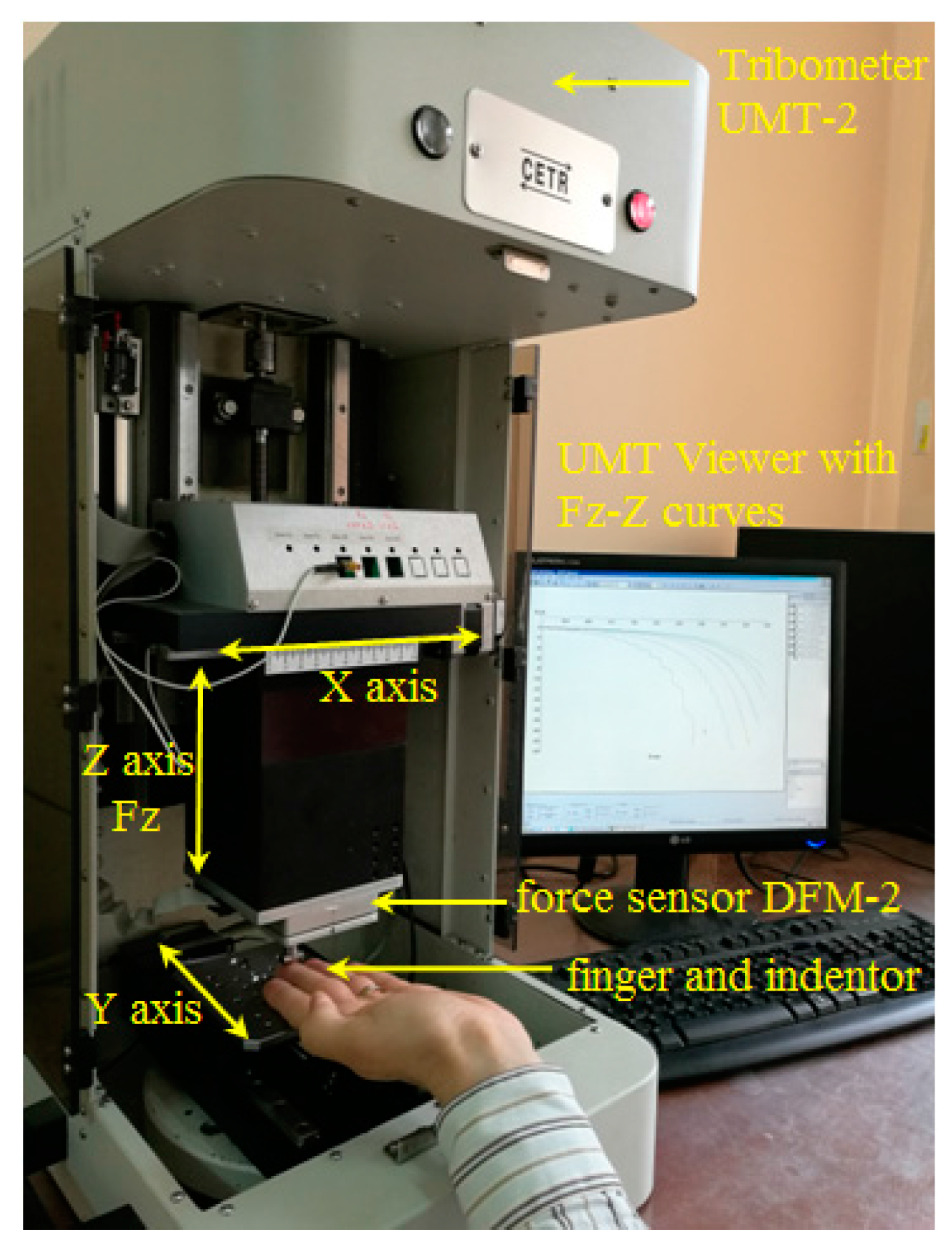
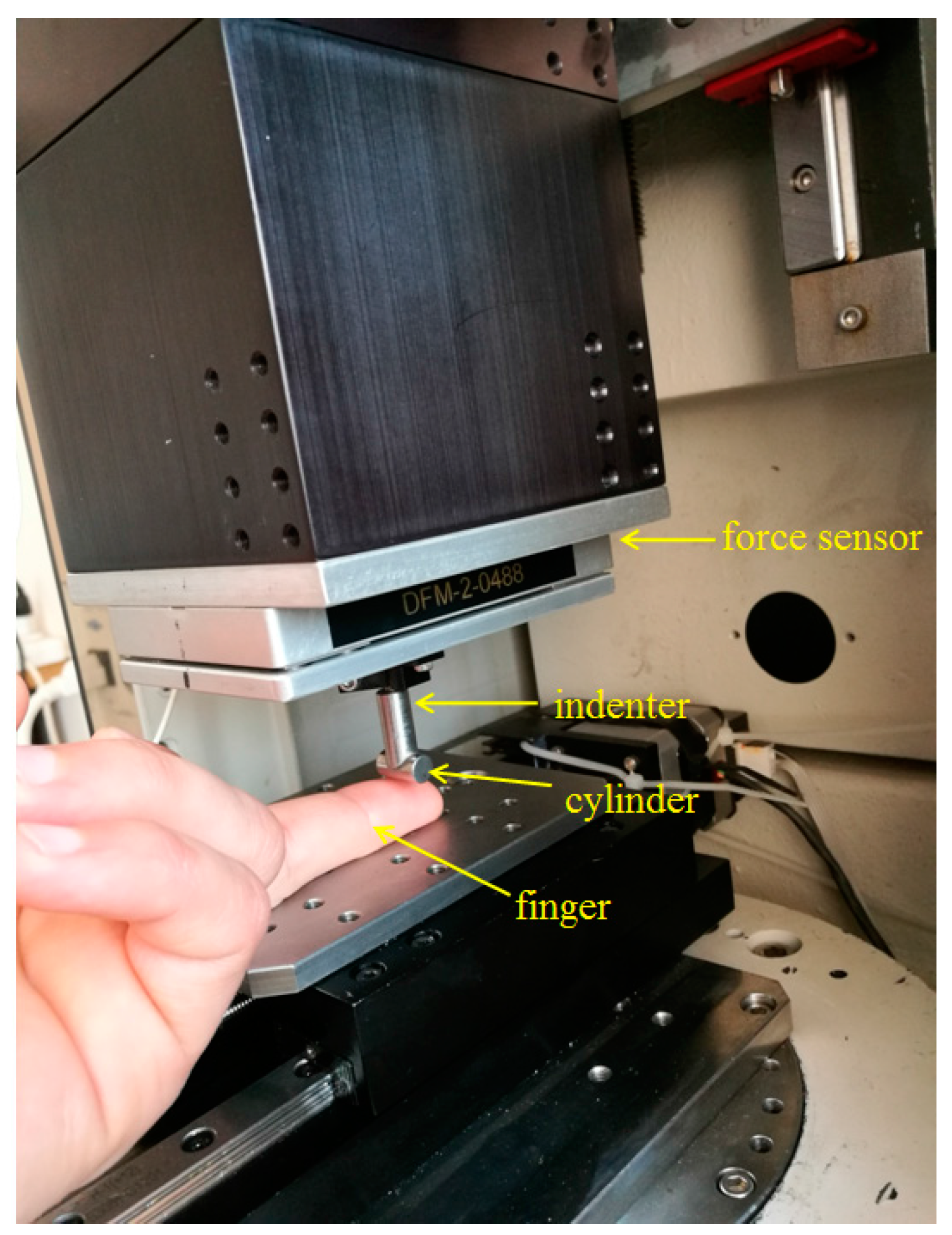
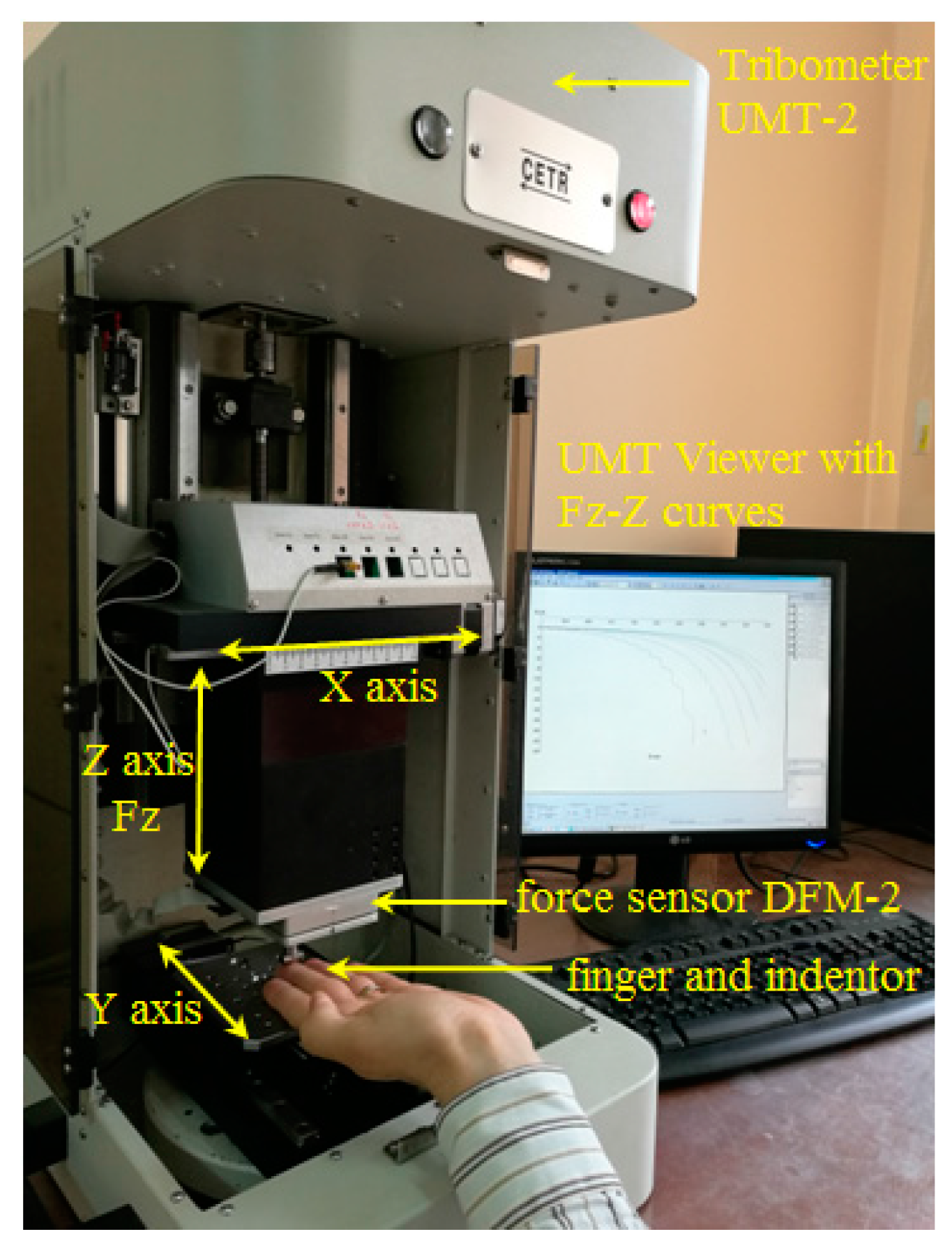
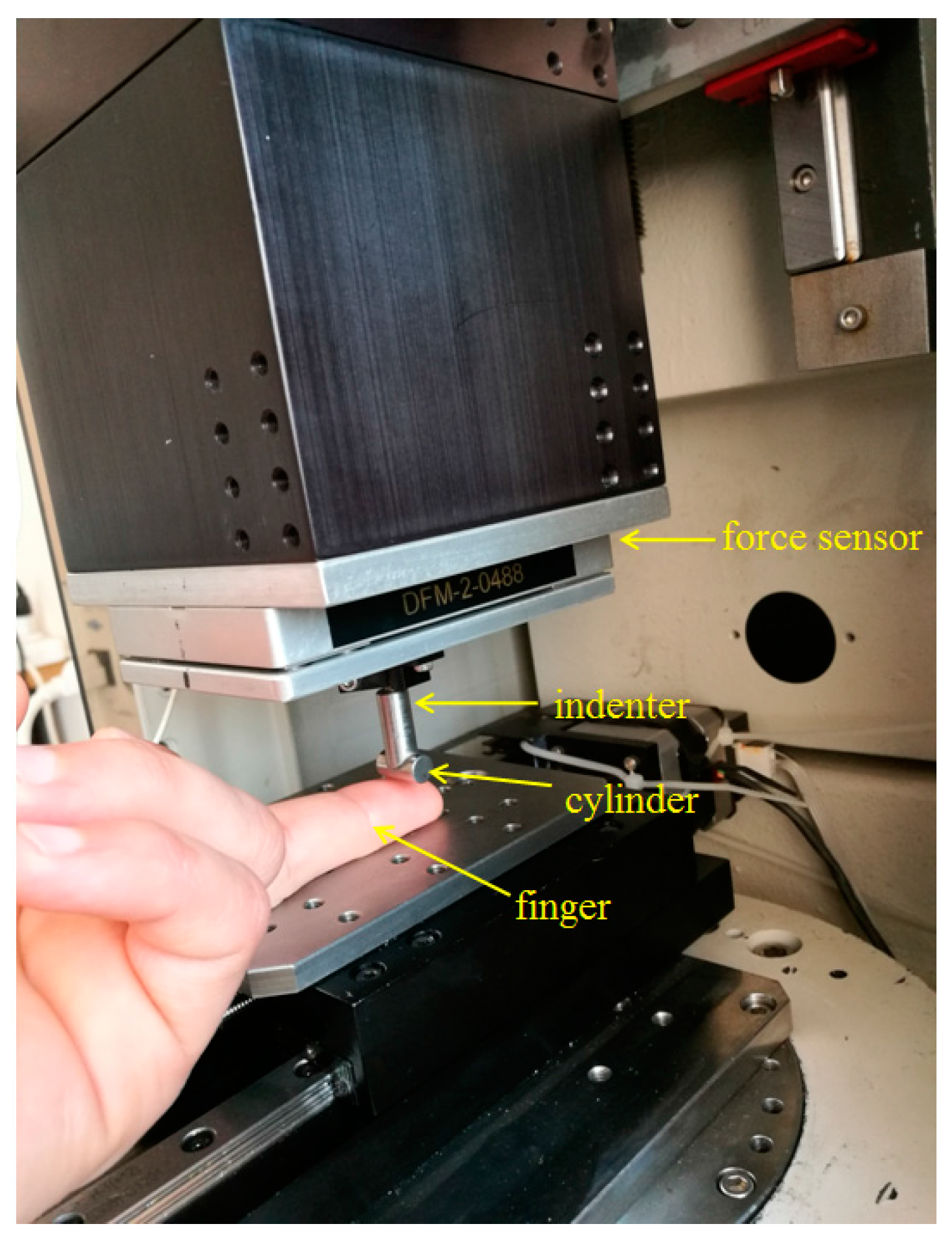
2. Experimental Investigations
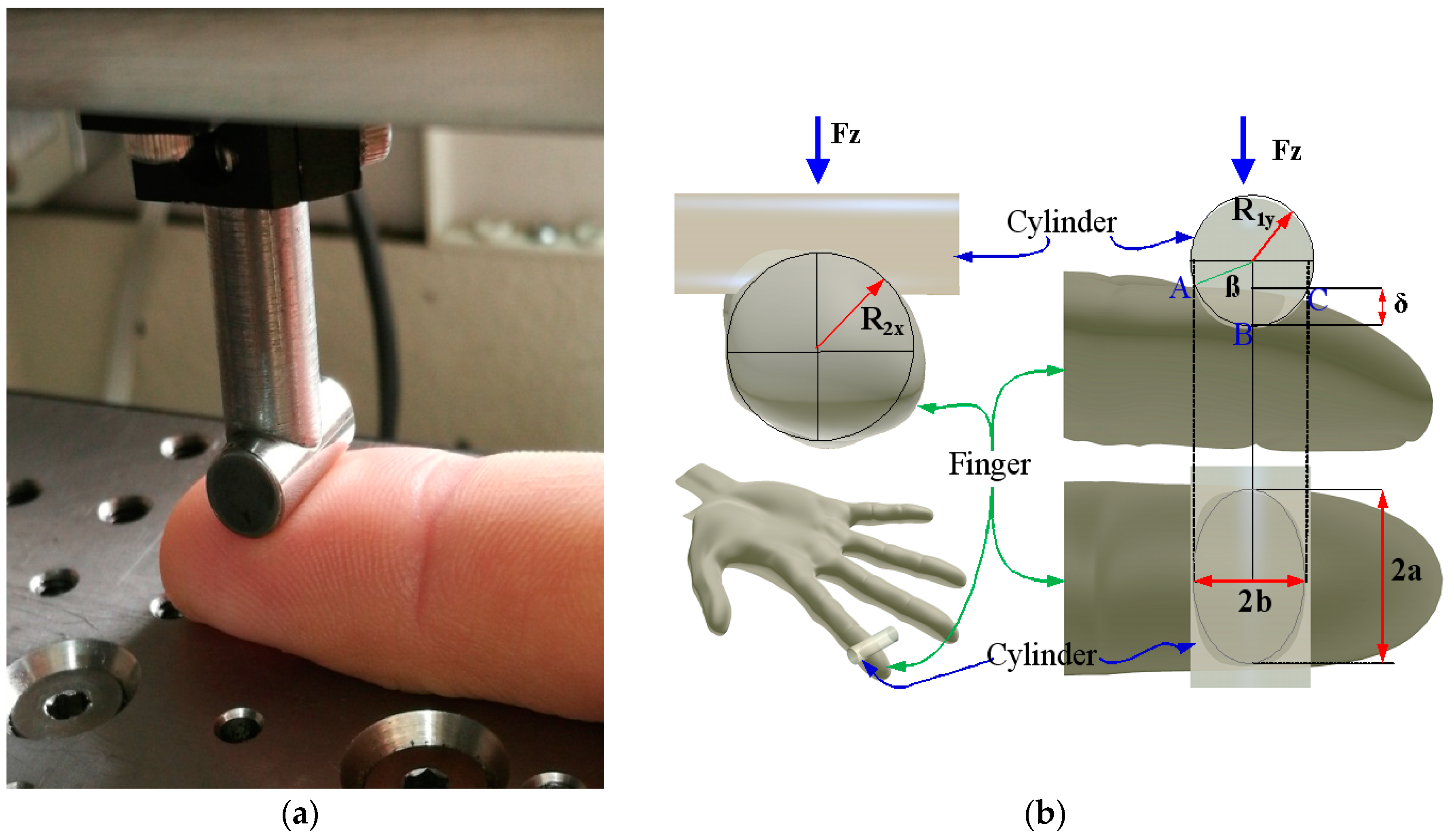
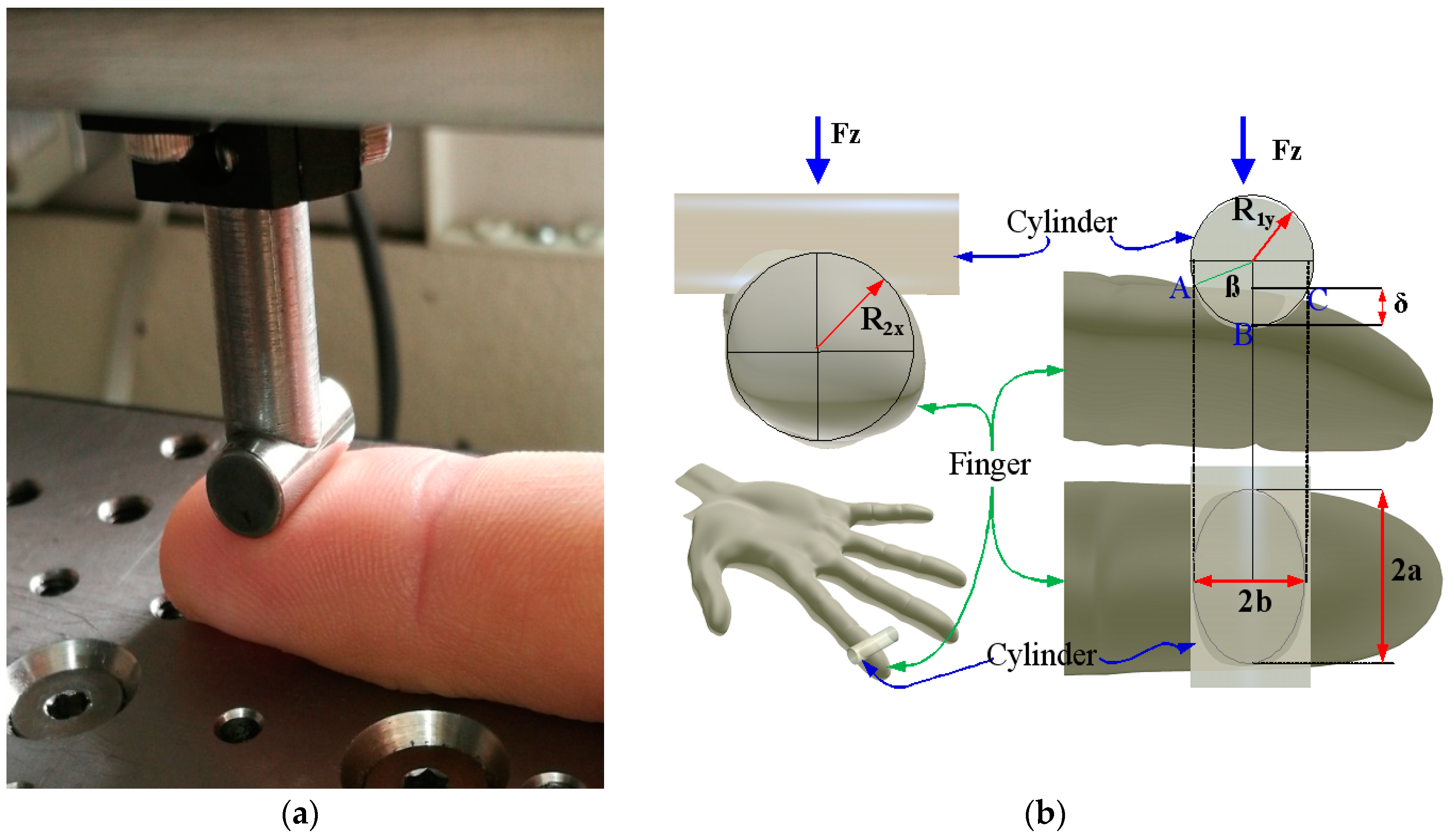
3. Determination of the Effective Young’s Modulus of the Middle Finger
4. Experimental Results
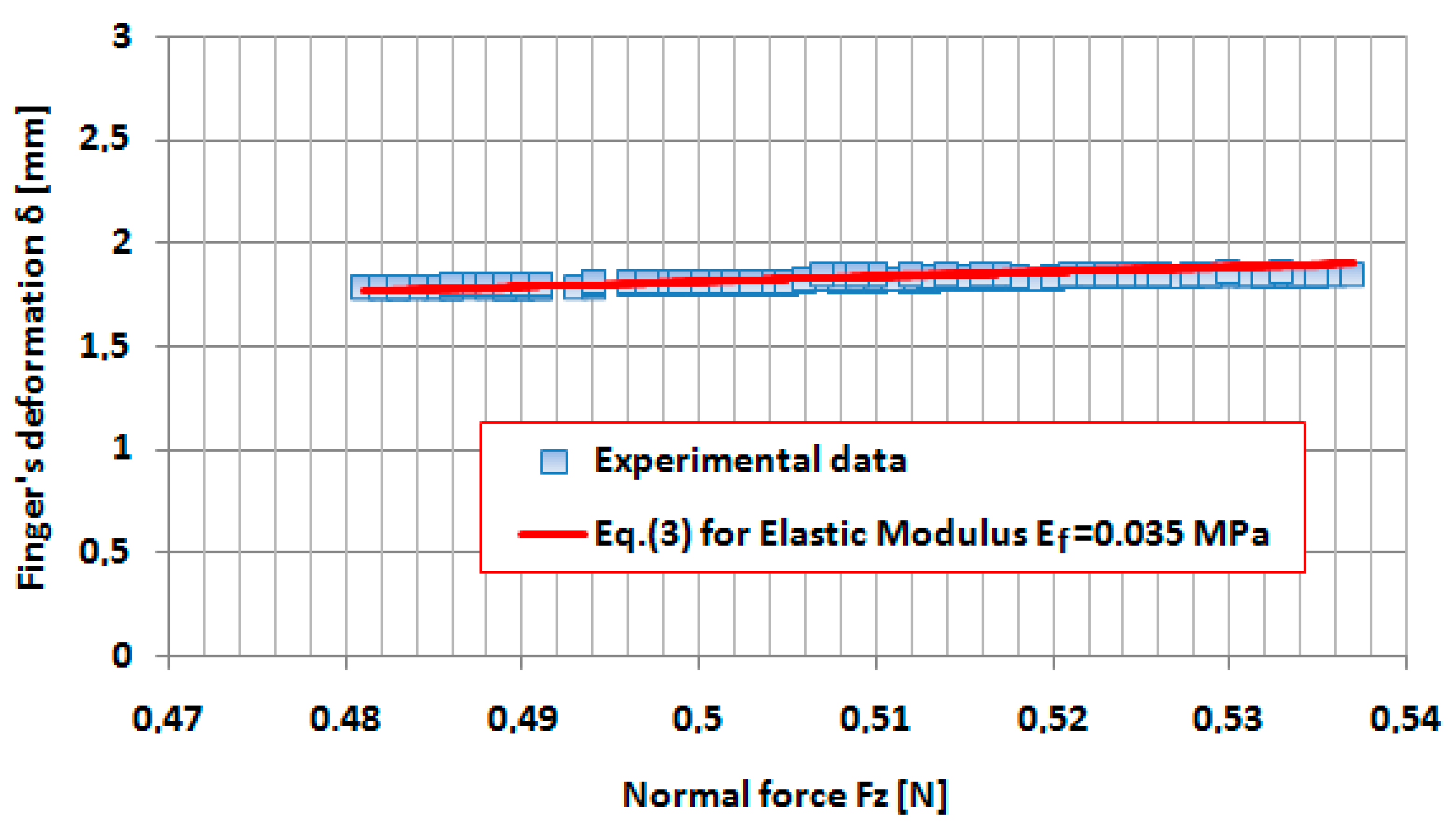
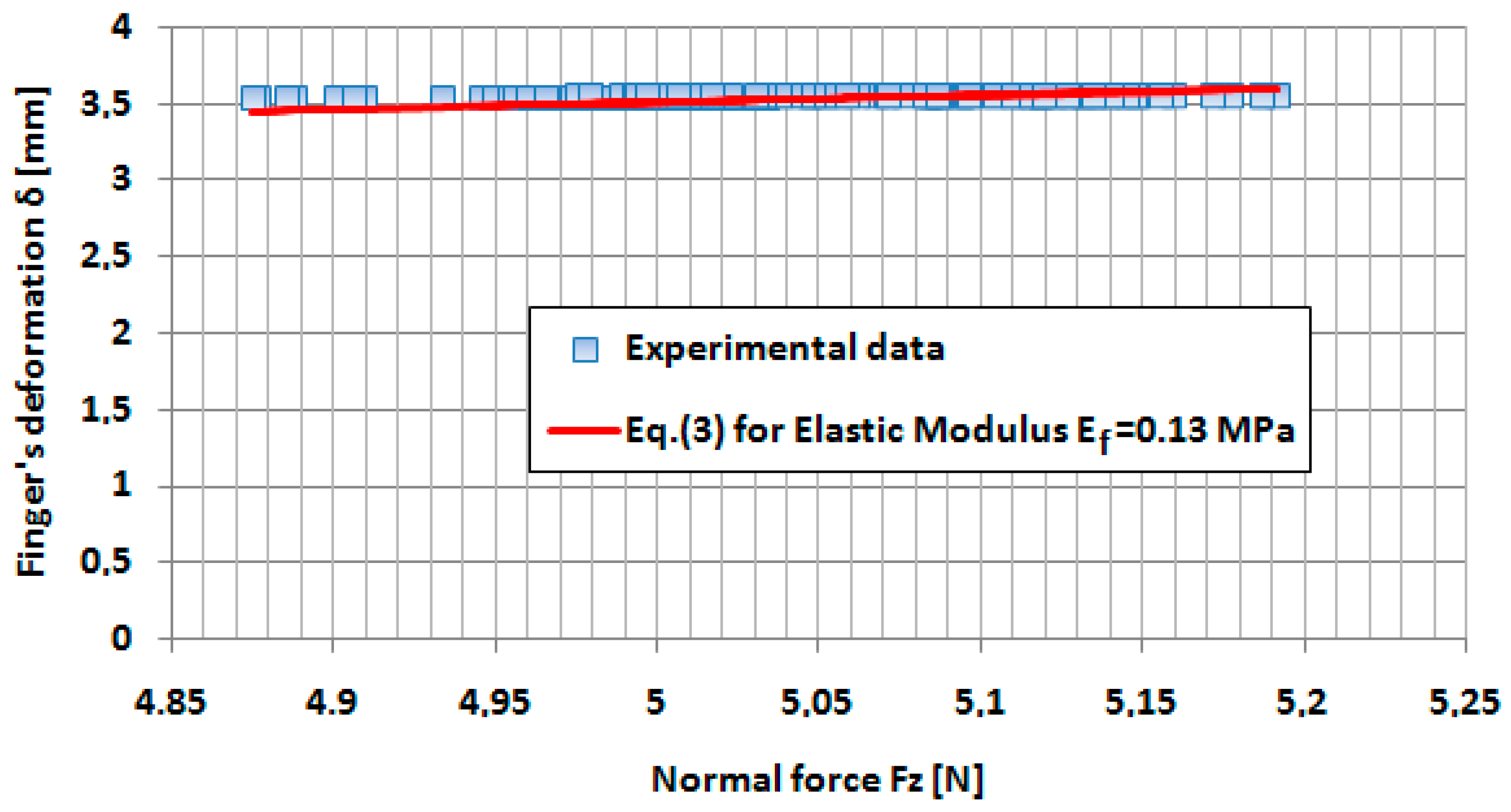
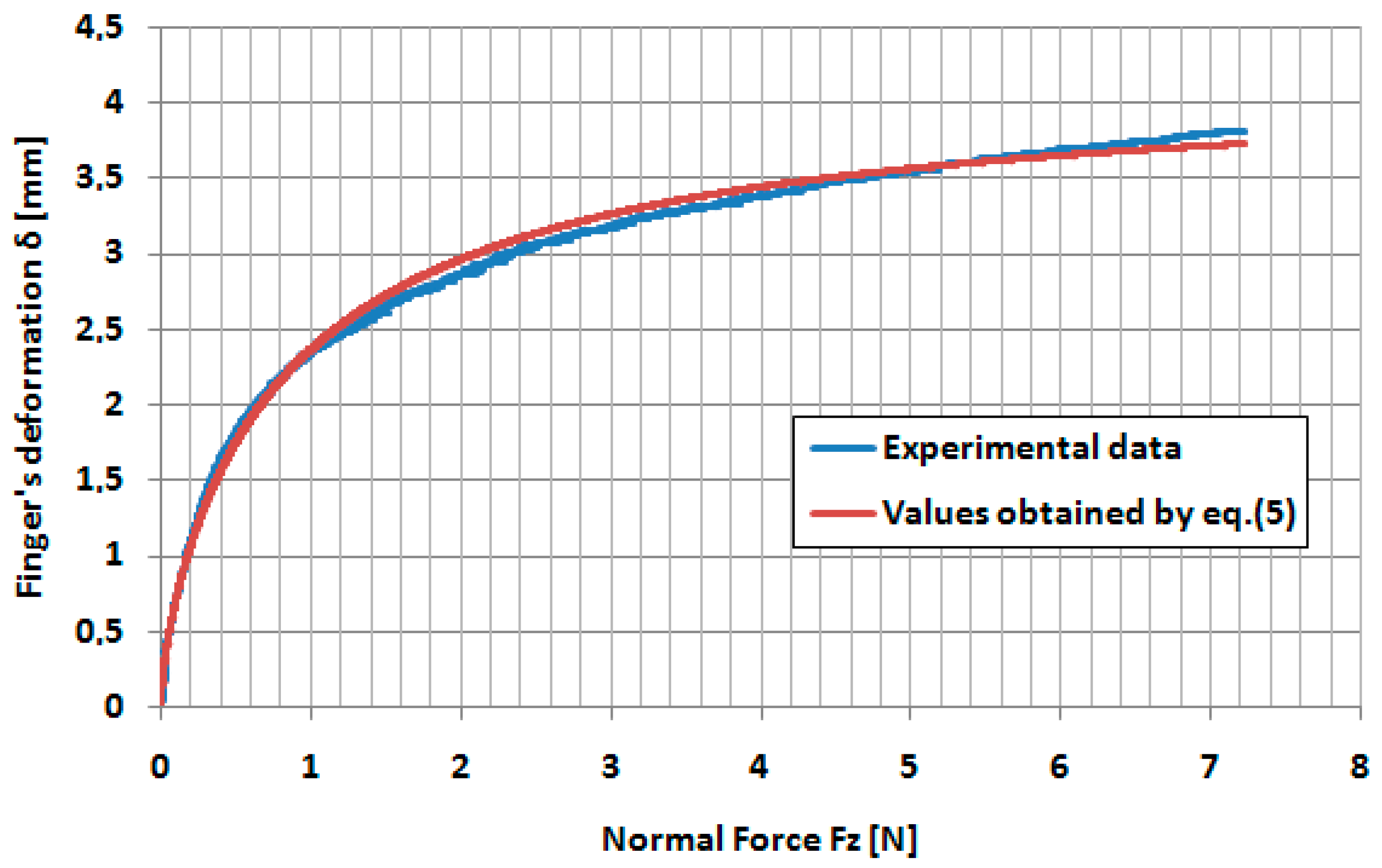
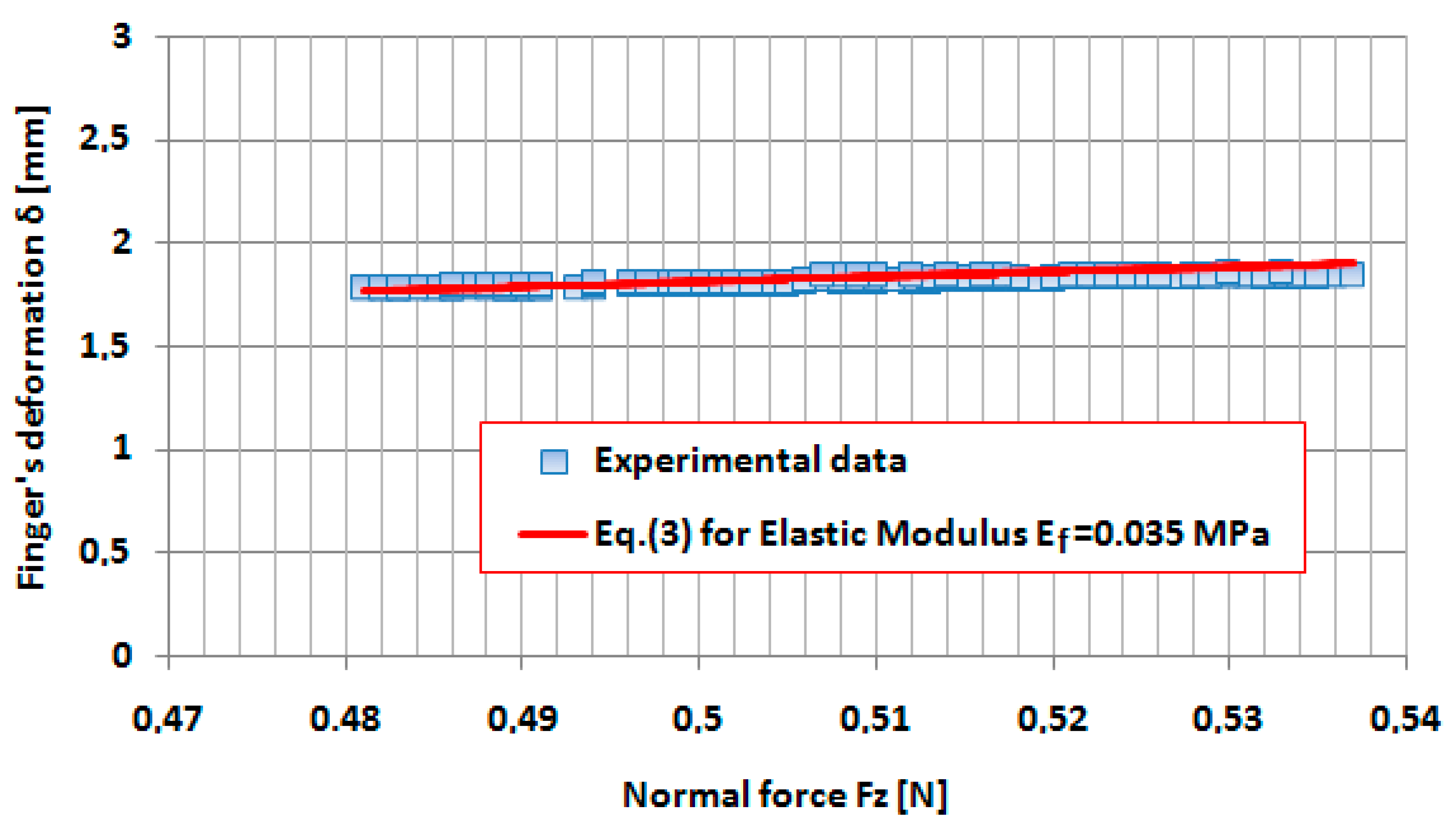
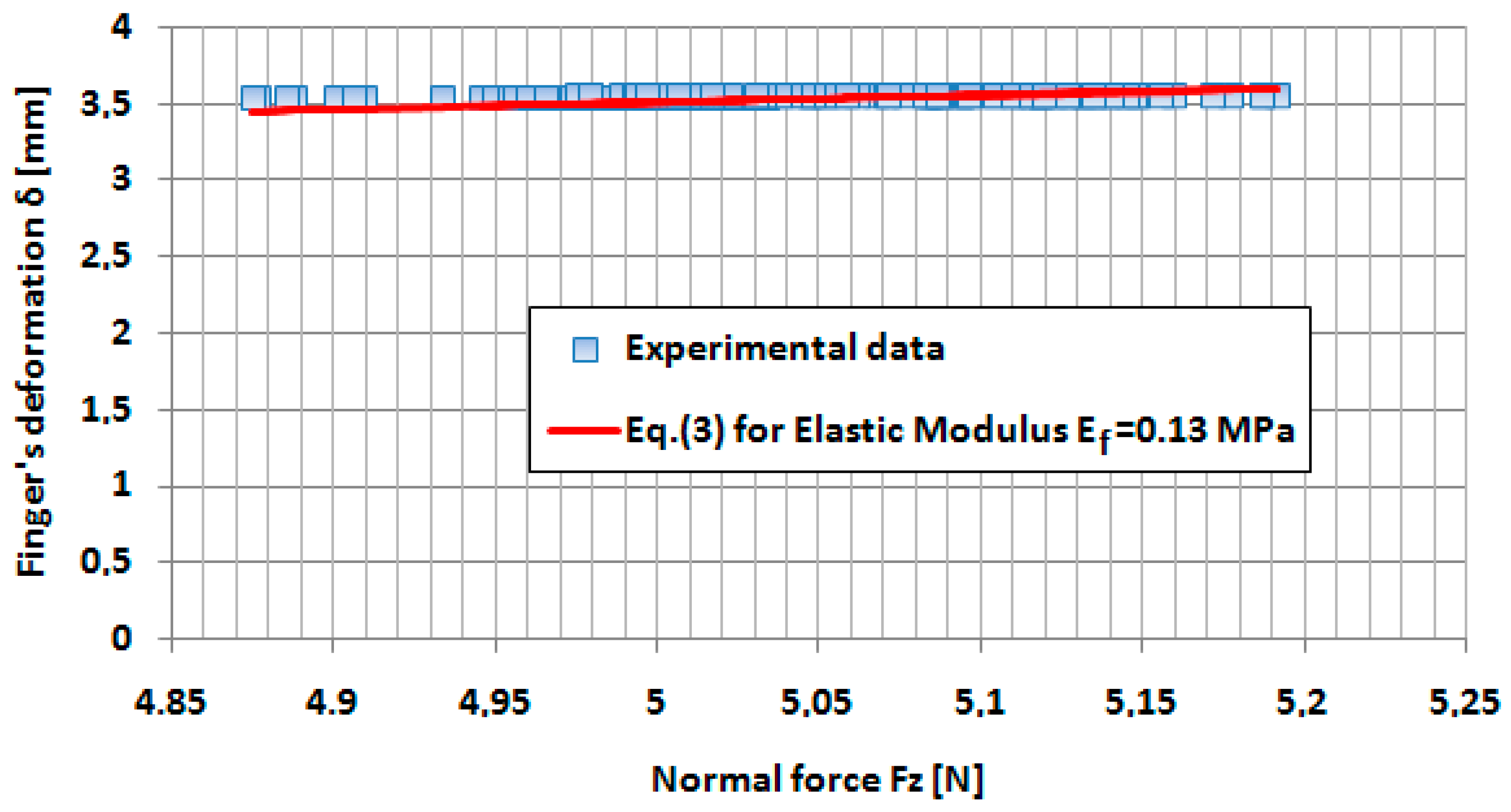
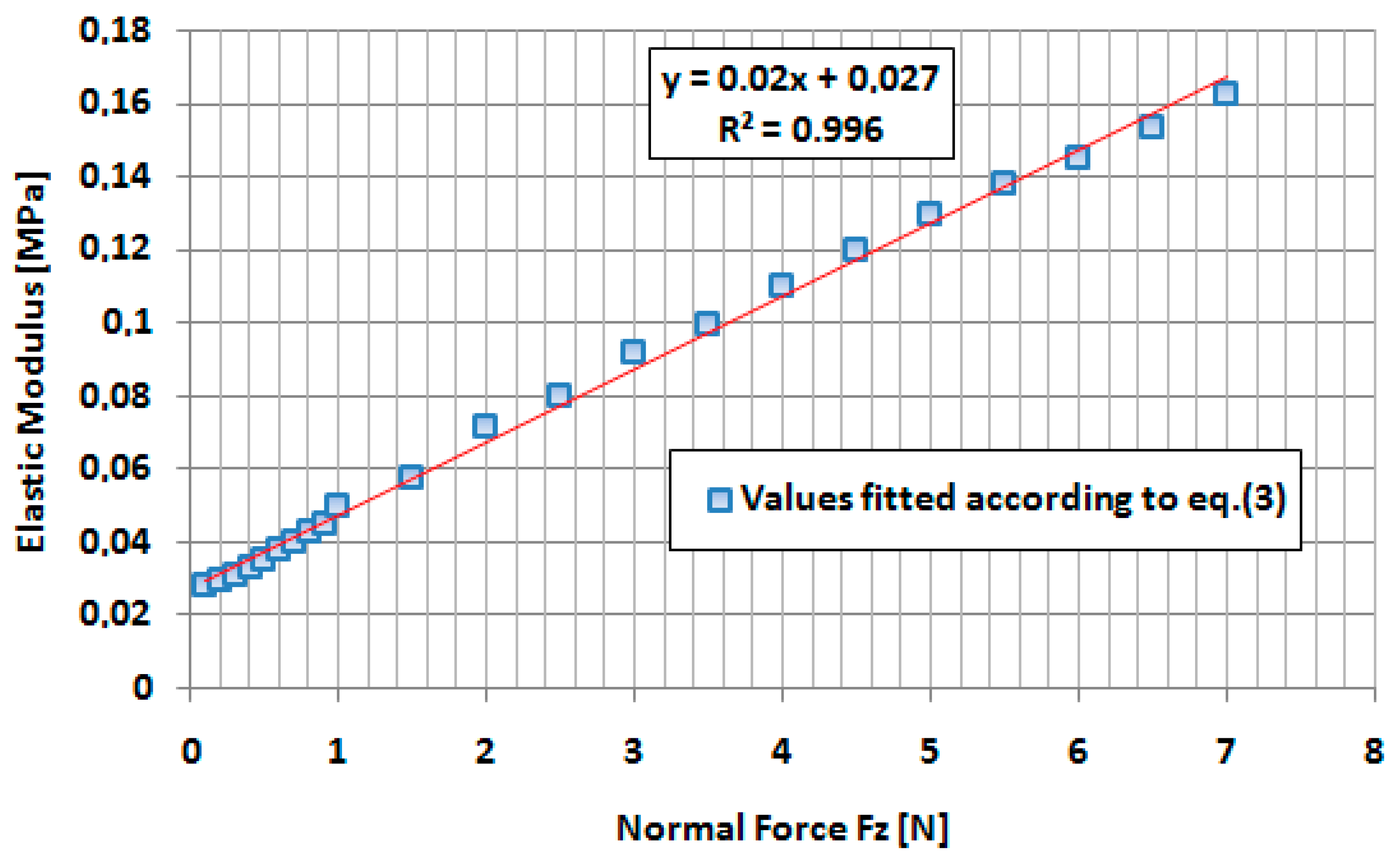
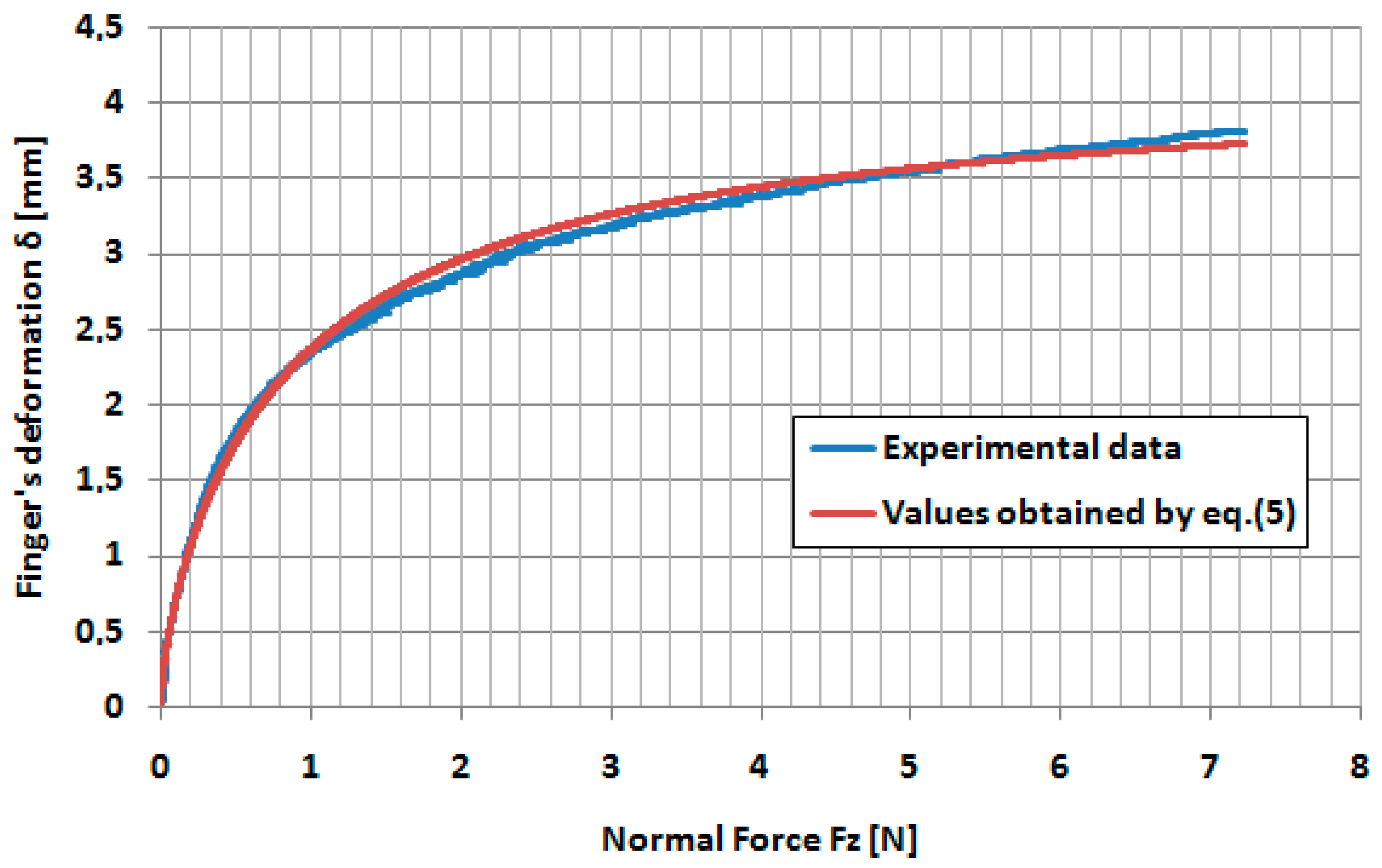
4.1. Determination of the Young’s Modulus
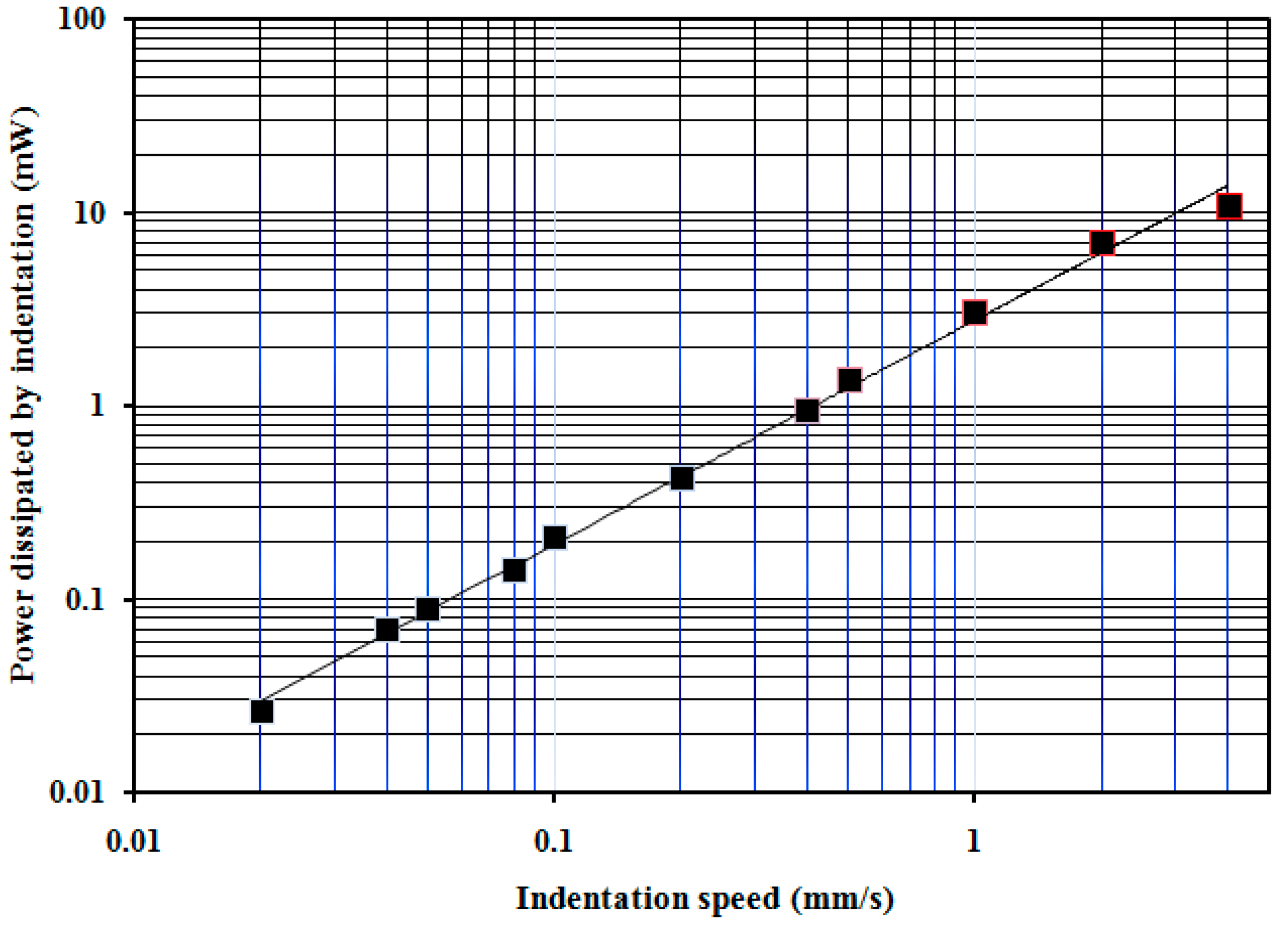
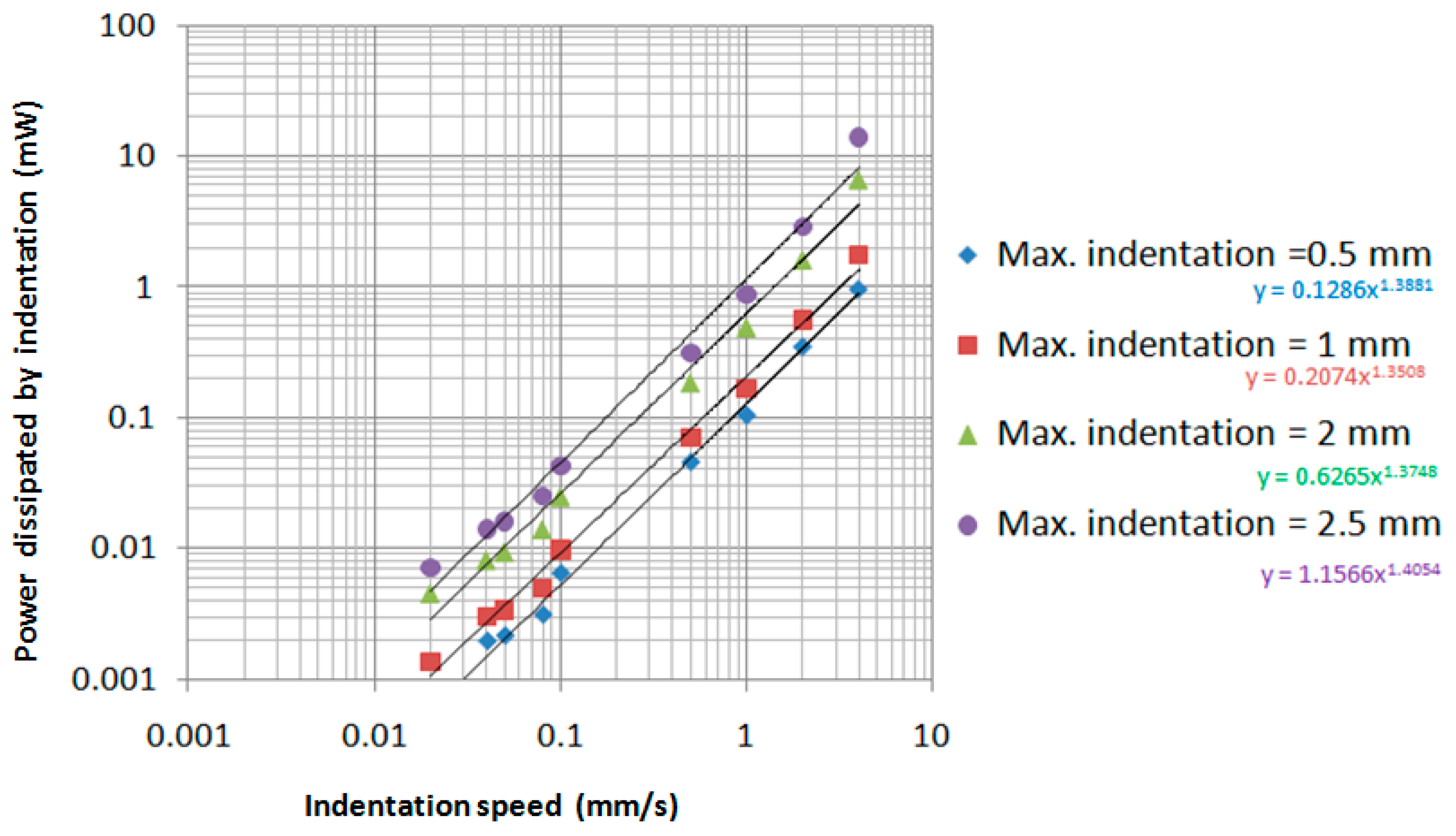
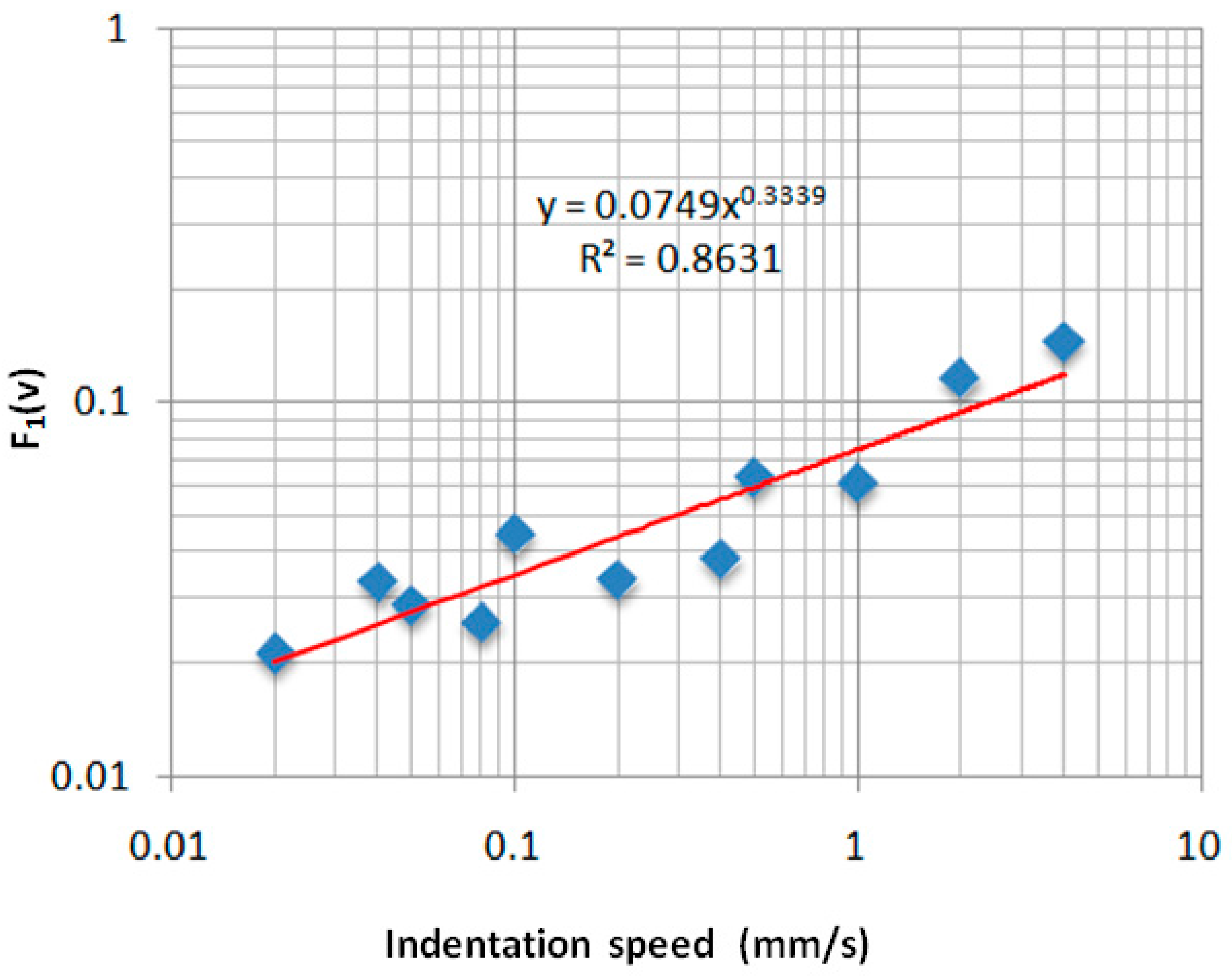
4.2. Evaluation of the Power Loss in the Indentation Process
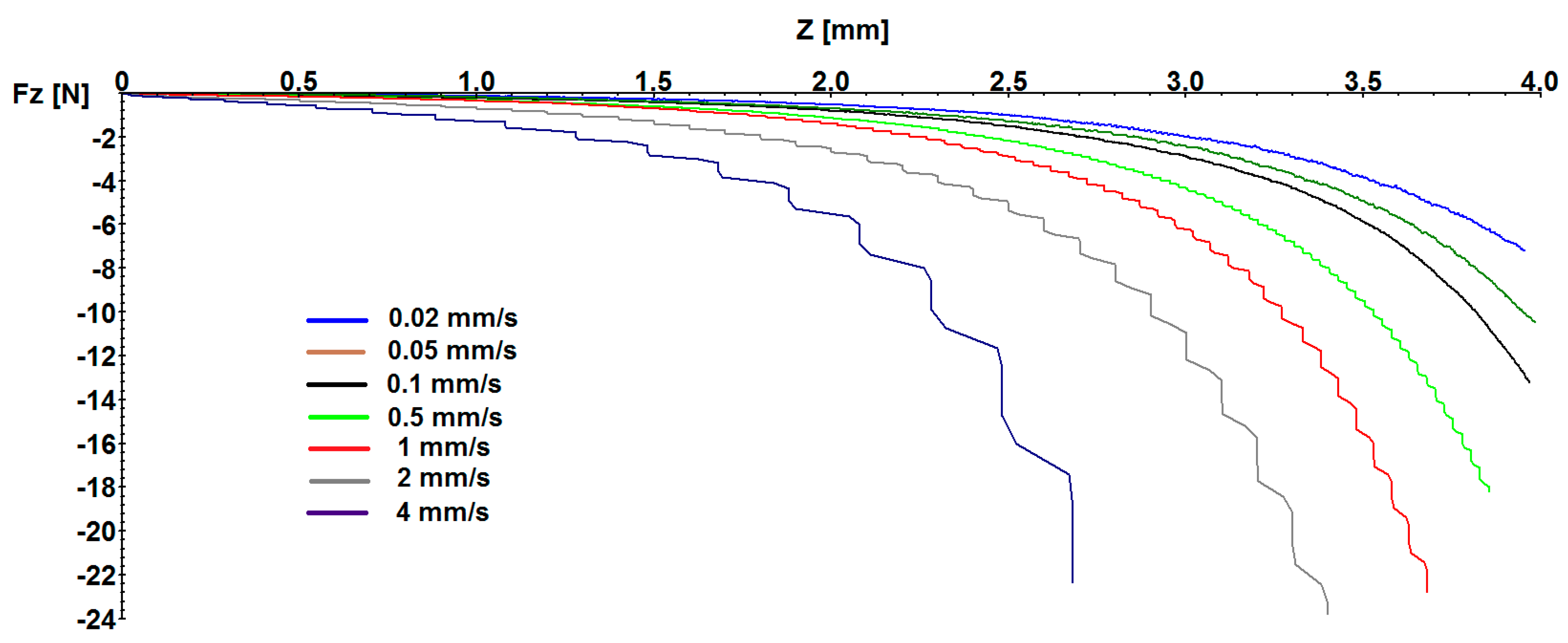
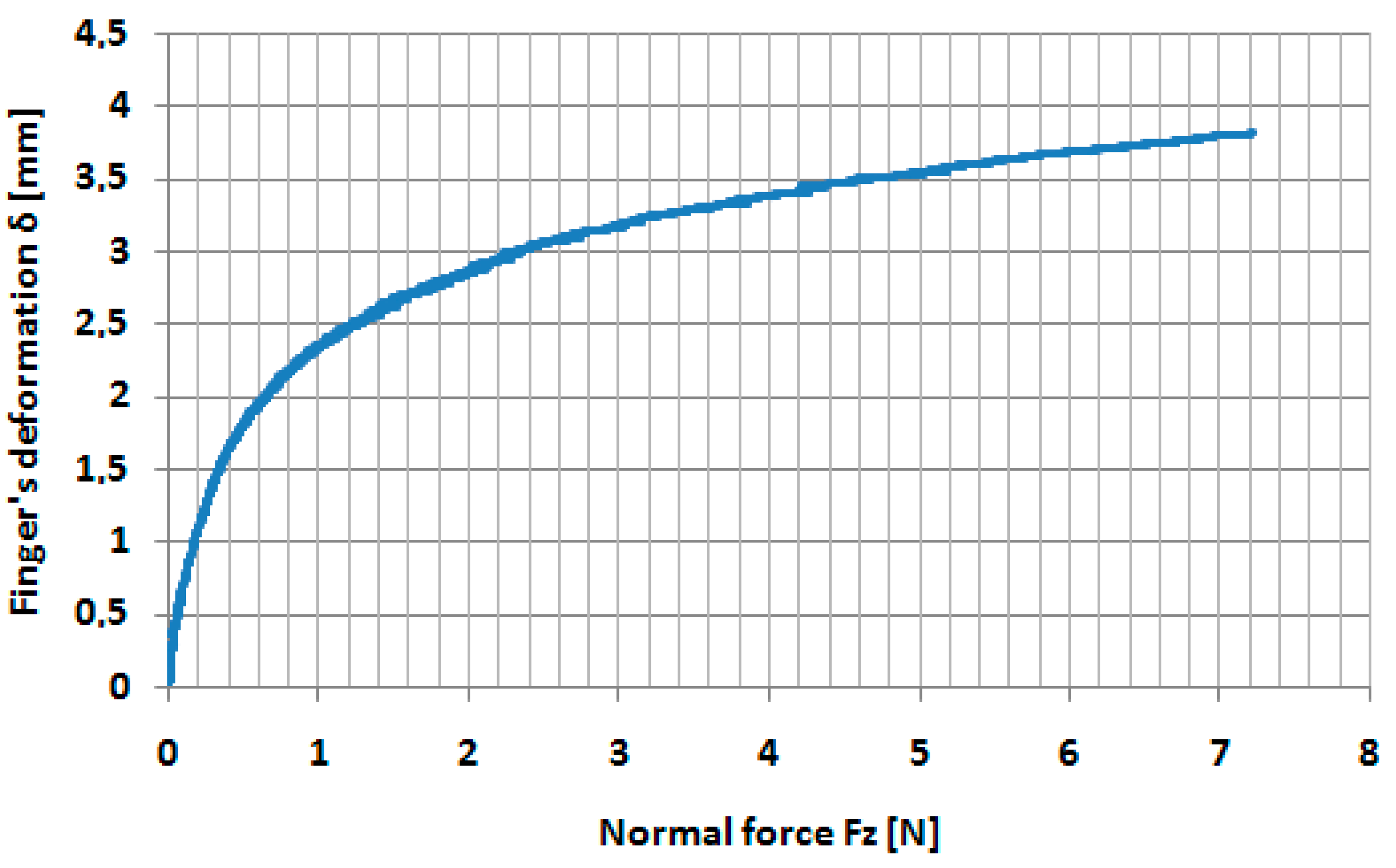
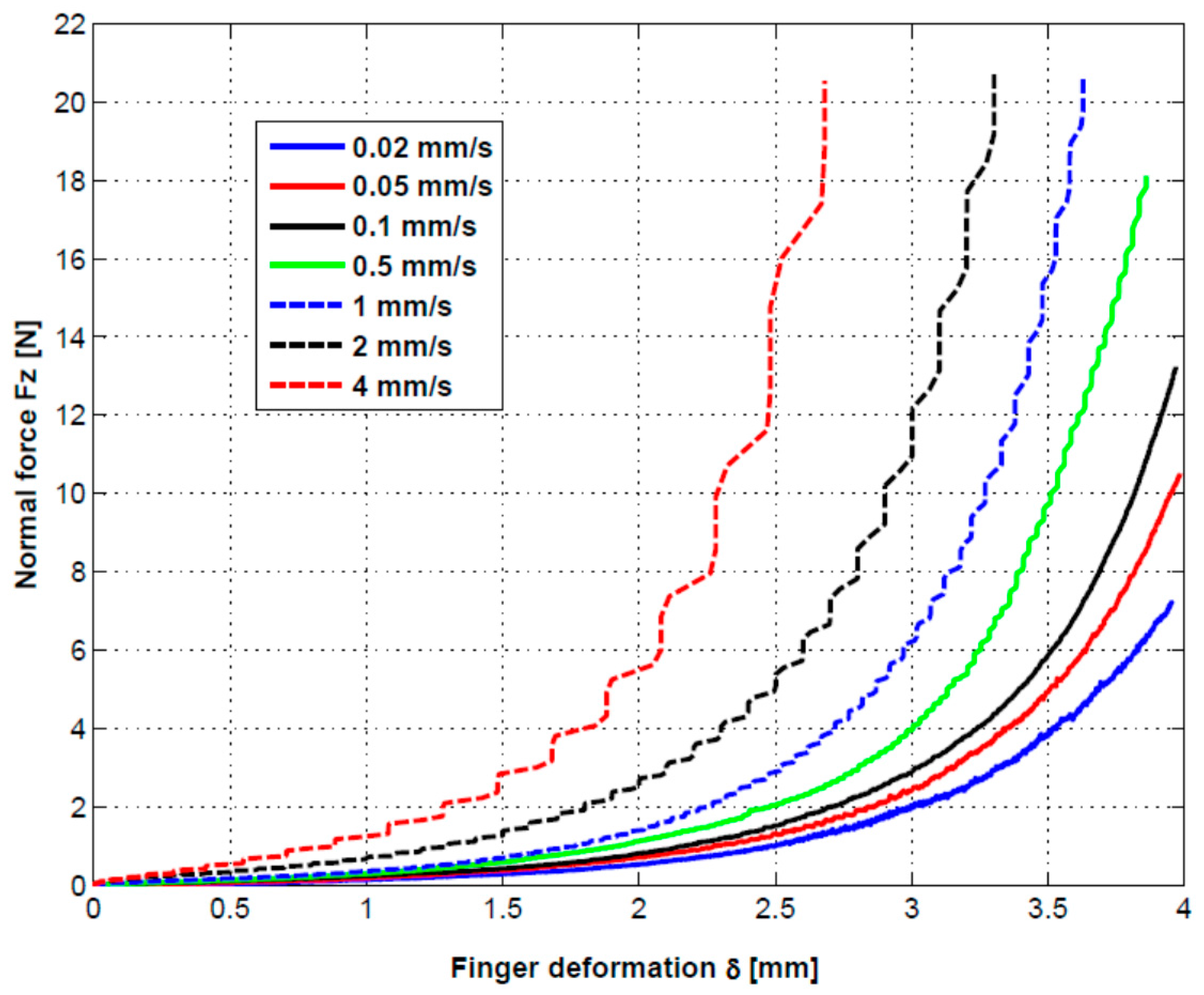
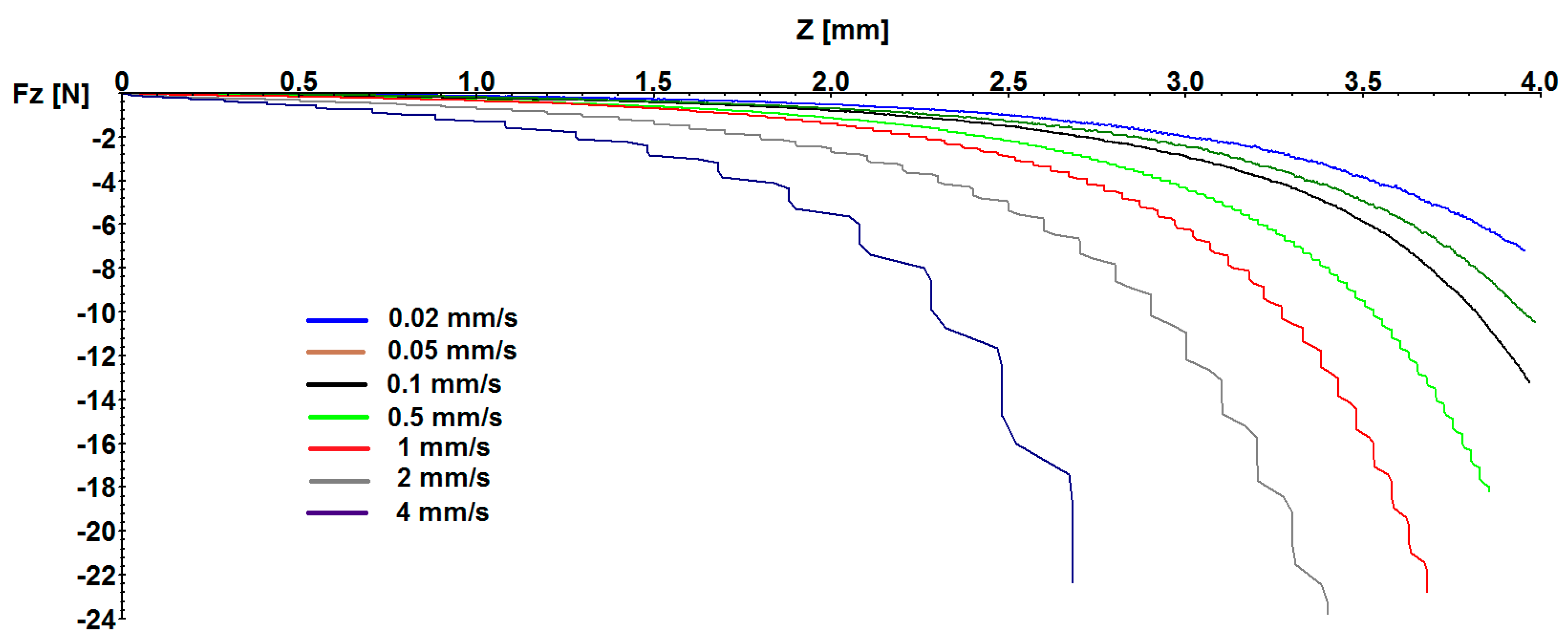
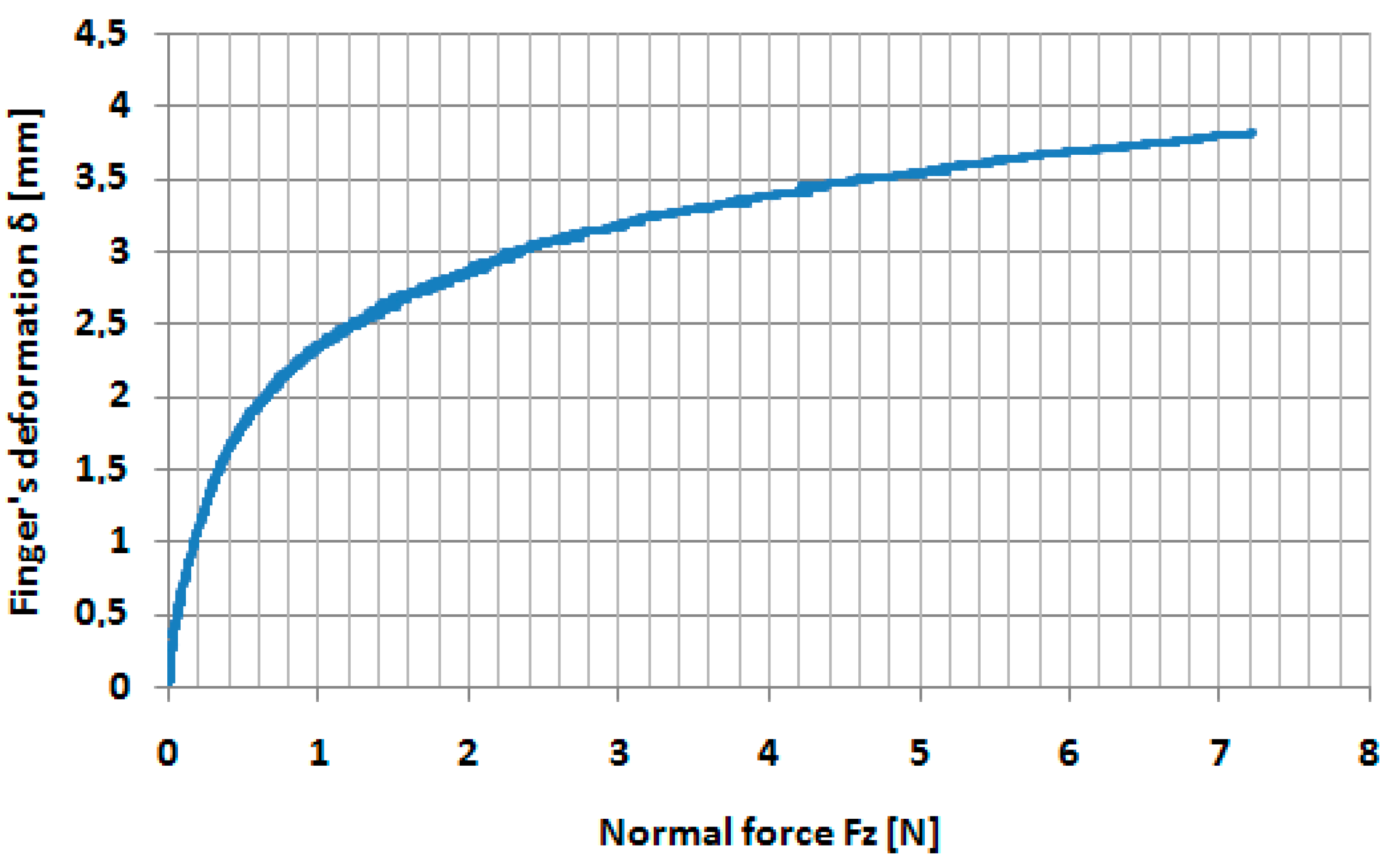
- By increasing of the indentation depth, the indentation force Fz has a continual increase. It is a normal process as a result of the compression of the finger’s tissue.
- By increasing of the indentation speed, for some indentation depth, the indentation forces have important increases as result of a complex damping effect caused by the resistance of the finger’s tissue to have a fast response corresponding to the speed of the indentation.
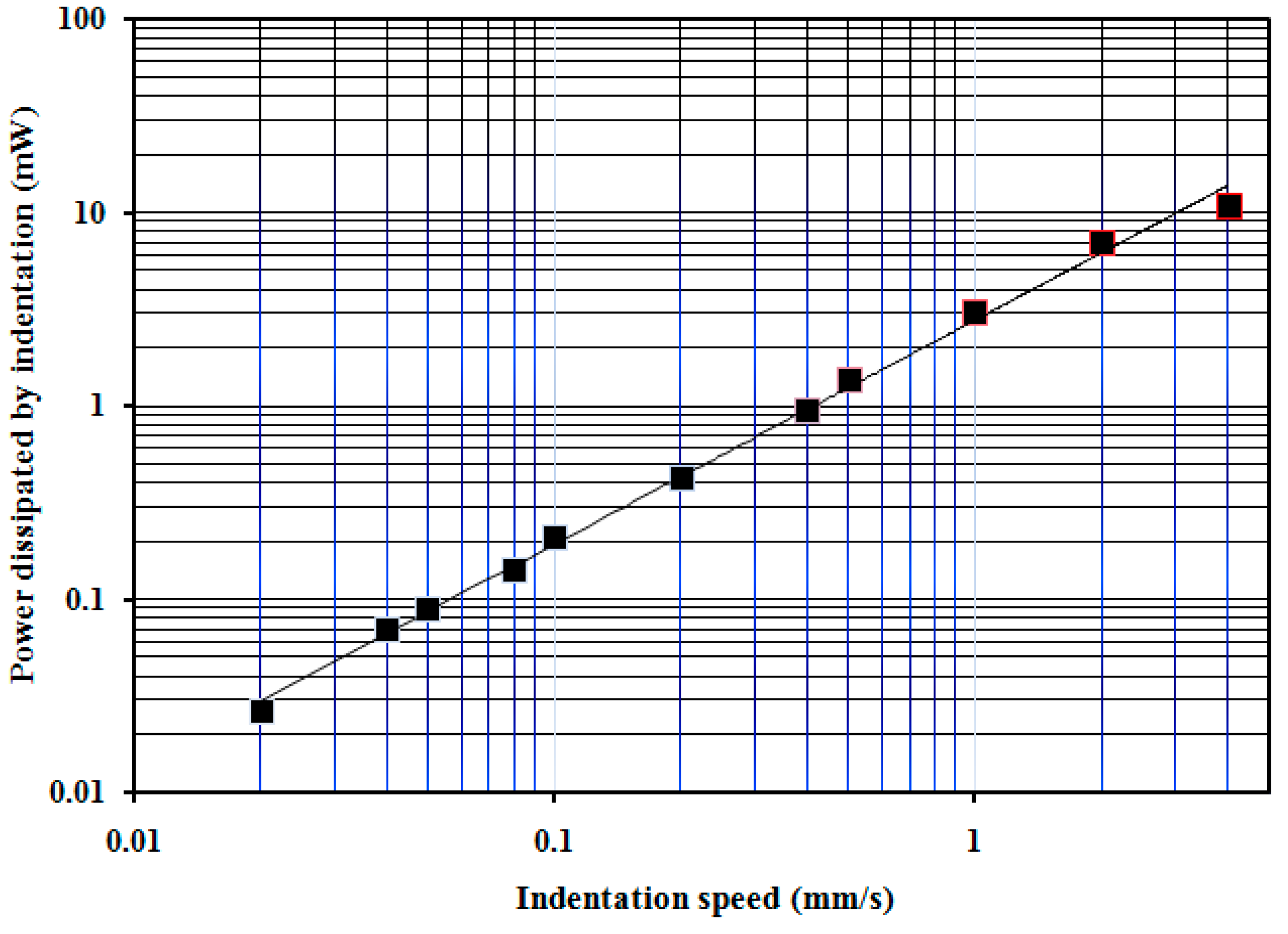
- The damping process is a complex one and depends on both the indentation depth and the indentation speed. It is clear that the power loss dissipated in the finger tissue increases with increasing of the indentation speed.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Controzzi, M.; D’Alonzo, M.; Peccia, C.; Oddo, C.M.; Carrozza, M.C.; Cipriani, C. Bioinspired fingertip for anthropomorphic robotic hands. Appl. Bionics Biomech. 2014, 11, 25–38. [Google Scholar] [CrossRef]
- Kwiatkowska, M.; Franklin, S.E.; Hendriks, C.P.; Kwiatkowski, K. Friction and deformation behaviour of human skin. Wear 2009, 267, 1264–1273. [Google Scholar] [CrossRef]
- Derler, S.; Gerhardt, L.-C.; Lenz, A.; Bertaux, E.; Hadad, M. Friction of human skin against smooth and rough glass as a function of the contact pressure. Tribol. Int. 2009, 42, 1565–1574. [Google Scholar] [CrossRef]
- Derler, S.; Rotaru, G.-M. Stick–slip phenomena in the friction of human skin. Wear 2013, 301, 324–329. [Google Scholar] [CrossRef]
- Tomlinson, S.E. Understanding the Friction between Human Fingers and Contacting Surfaces. Ph.D. Thesis, The University of Sheffield, Sheffield, UK, 2009. [Google Scholar]
- Tomlinson, S.E.; Lewis, R.; Carre, M.J.; Franklin, S.E. Human finger friction in contacts with ridged surfaces. Wear 2013, 301, 330–337. [Google Scholar] [CrossRef]
- Zhang, M.; Mo, J.L; Xu, J.Y.; Zhang, X.; Wang, D.W.; Zhou, Z.R. The Effect of Changing Fingerprinting Directions on Finger Friction. Tribol. Lett. 2017, 65, 60. [Google Scholar] [CrossRef]
- Liu, X. Understanding the Effect of Skin Mechanical Properties on the Friction of Human Finger-Pads. Ph.D. Thesis, Department of Mechanical Engineering, University of Sheffield, Sheffield, UK, 2013. [Google Scholar]
- Oliver, W.C.; Pharr, G.M. An improved technique for determining hardness and elastic modulus using load and displacement sensing indentation experiments. J. Mater. Res. 1992, 7, 1564–1583. [Google Scholar] [CrossRef]
- Han, H.Y.; Shimada, A.; Kawamura, S. Analysis of friction on human fingers and design of artificial fingers. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996; pp. 3061–3066. [Google Scholar]
- Kuilenburg, J.; Masen, M.; Heide, E. Contact modelling of human skin: What value to use for the modulus of elasticity? Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2013, 227, 349–361. [Google Scholar] [CrossRef]
- Morales Hurtado, M. Mimicking the Tribo-Mechanical Performance of Human Skin: A Scale—Dependent Approch Based on Poly (Vinyl Alcohol) Hydrogel. Ph.D. Thesis, University of Twente, Enschede, The Netherlands, 2016. [Google Scholar]
- Zahouani, H.; Boyer, G.; Pailler-Mattei, C.; Tkaya, M.; Vargiolu, R. Effect of human ageing on skin rheology and tribology. Wear 2011, 271, 2364–2369. [Google Scholar] [CrossRef]
- Derler, S.; Gerhardt, L.-C. Tribology of Skin: Review and Analysis of Experimental Results for the Friction Coefficient of Human Skin. Tribol. Lett. 2012, 45, 1–27. [Google Scholar] [CrossRef]
- Barnea, A.; Oprisan, C.; Olaru, D. Prehension of the Small Cylindrical Objects by the Human Fingers. Friction and Adherence Processes. Appl. Mech. Mater. Adv. Concepts Mech. Eng. I 2014, 658, 721–727. [Google Scholar] [CrossRef]
- Barnea, A.; Rusu, M.A.; Oprisan, C.; Olaru, D. Friction between cylindrical objects and Prehension elastomer fingers. Romanian Rev. Precis. Mech. Opt. Mech. 2015, 48, 219–223. [Google Scholar]
- Oprişan, C.; Cârlescu, V.; Barnea, A.; Prisacaru, G.; Olaru, D.; Plesu, G. Experimental determination of the Young’s modulus for the fingers with application in prehension systems for small cylindrical objects. IOP Conf. Ser. Mater. Sci. Eng. 2016, 147, 012058. [Google Scholar] [CrossRef]
- Pascovici, M.; Cicone, T.; Marian, V. Squeeze process under impact, in highly compressible porous layers, imbibed with liquids. Tribol. Int. 2009, 42, 1433–1438. [Google Scholar] [CrossRef]

© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cârlescu, V.; Olaru, D.N.; Prisăcaru, G.; Oprişan, C.; Machado, J. Sensors and Actuators on Determining Parameters for Being Considered in Selection of Elastomers for Biomimetic Hands. Sensors 2017, 17, 1190. https://doi.org/10.3390/s17061190
Cârlescu V, Olaru DN, Prisăcaru G, Oprişan C, Machado J. Sensors and Actuators on Determining Parameters for Being Considered in Selection of Elastomers for Biomimetic Hands. Sensors. 2017; 17(6):1190. https://doi.org/10.3390/s17061190
Chicago/Turabian StyleCârlescu, Vlad, Dumitru N. Olaru, Gheorghe Prisăcaru, Cezar Oprişan, and José Machado. 2017. "Sensors and Actuators on Determining Parameters for Being Considered in Selection of Elastomers for Biomimetic Hands" Sensors 17, no. 6: 1190. https://doi.org/10.3390/s17061190
APA StyleCârlescu, V., Olaru, D. N., Prisăcaru, G., Oprişan, C., & Machado, J. (2017). Sensors and Actuators on Determining Parameters for Being Considered in Selection of Elastomers for Biomimetic Hands. Sensors, 17(6), 1190. https://doi.org/10.3390/s17061190