
Sound Power Estimation for Beam and Plate Structures Using Polyvinylidene Fluoride Films as Sensors


Abstract
:
1. Introduction
2. Sensing Principle of PVDF Film
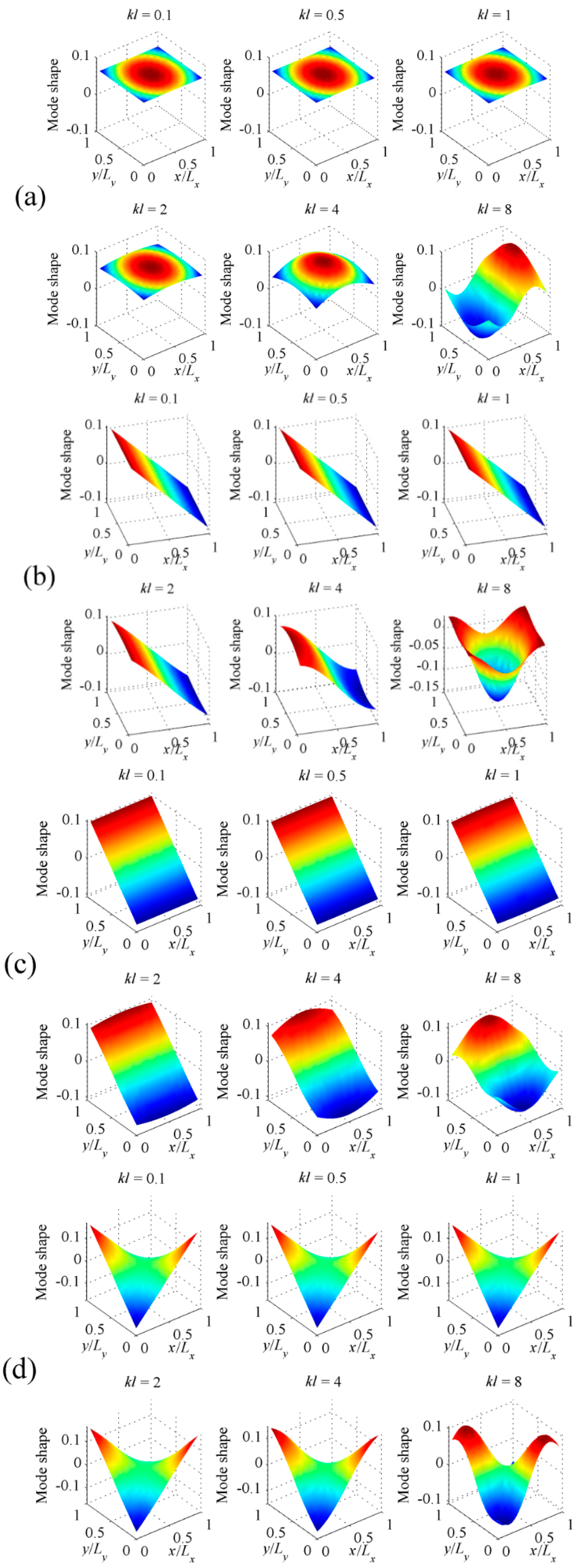
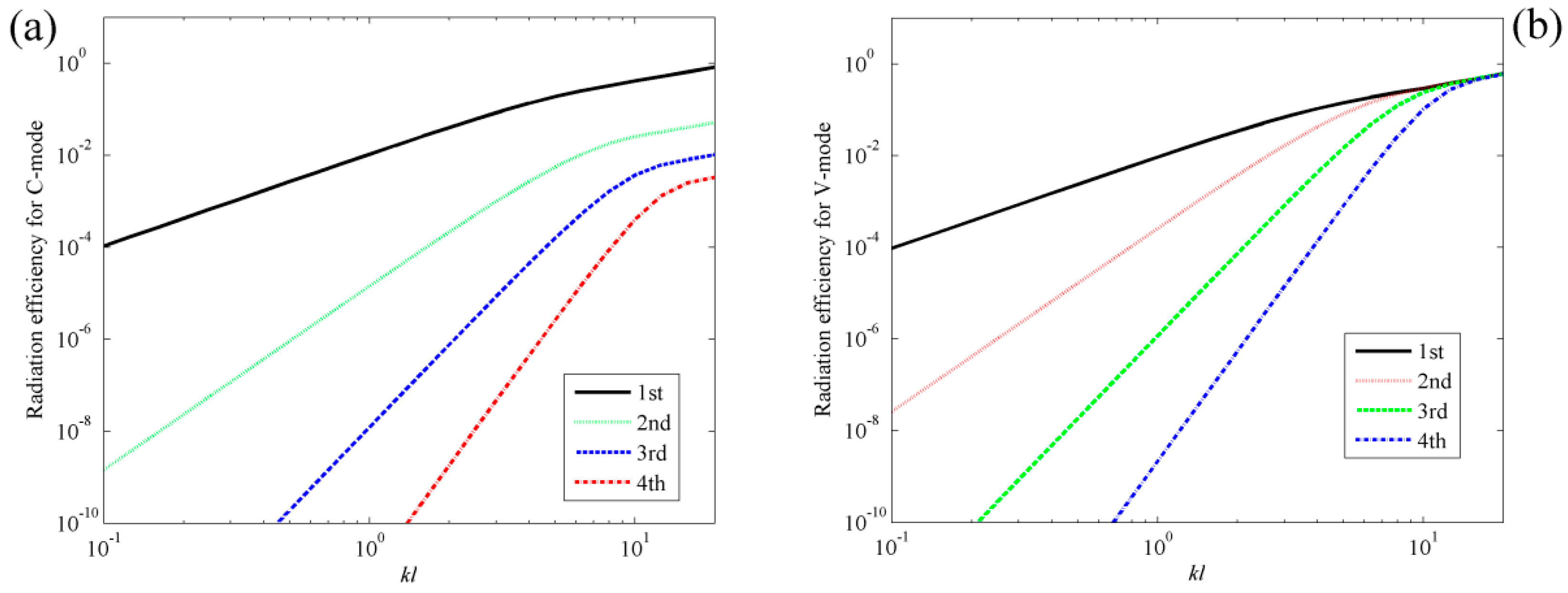
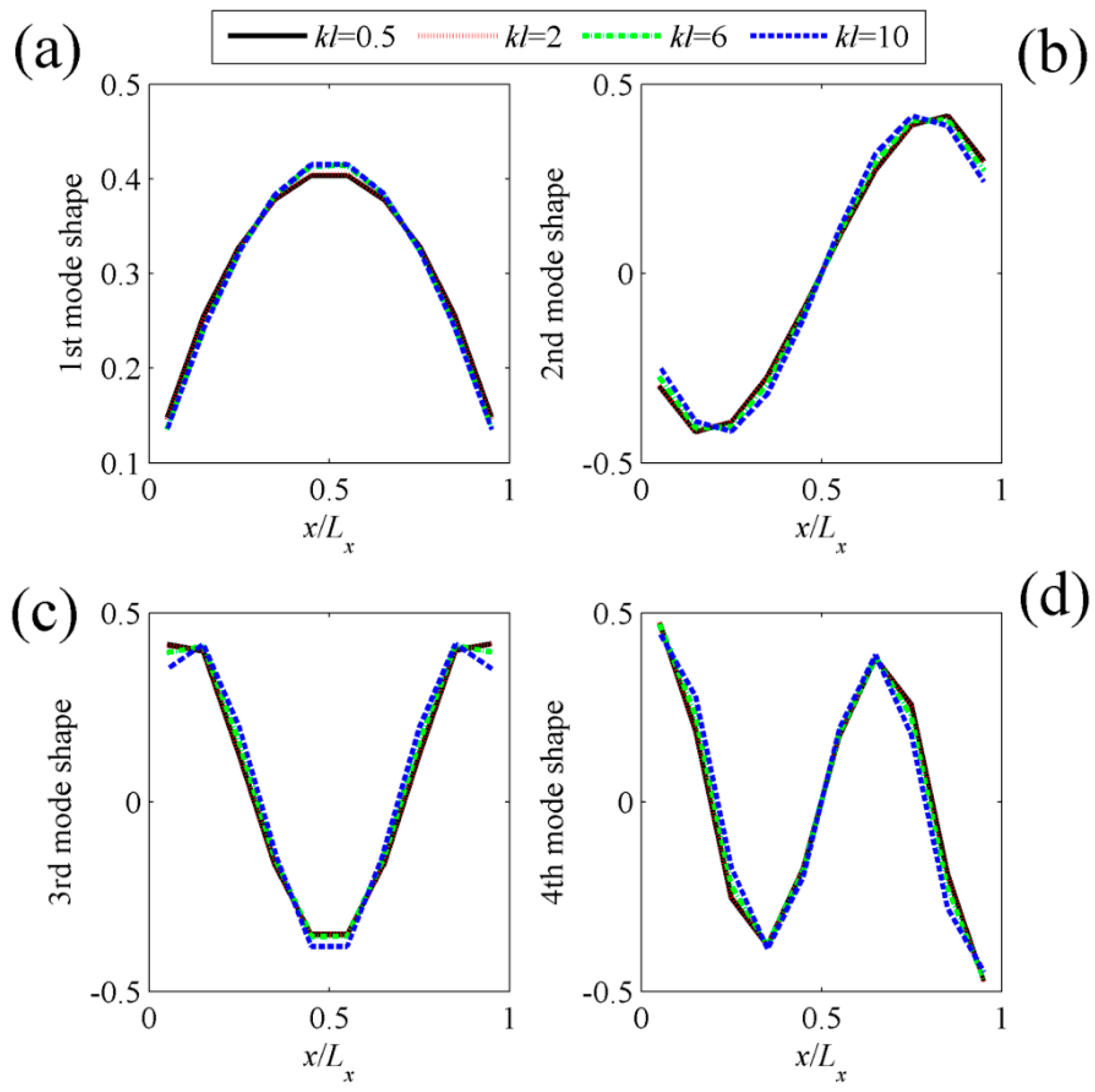
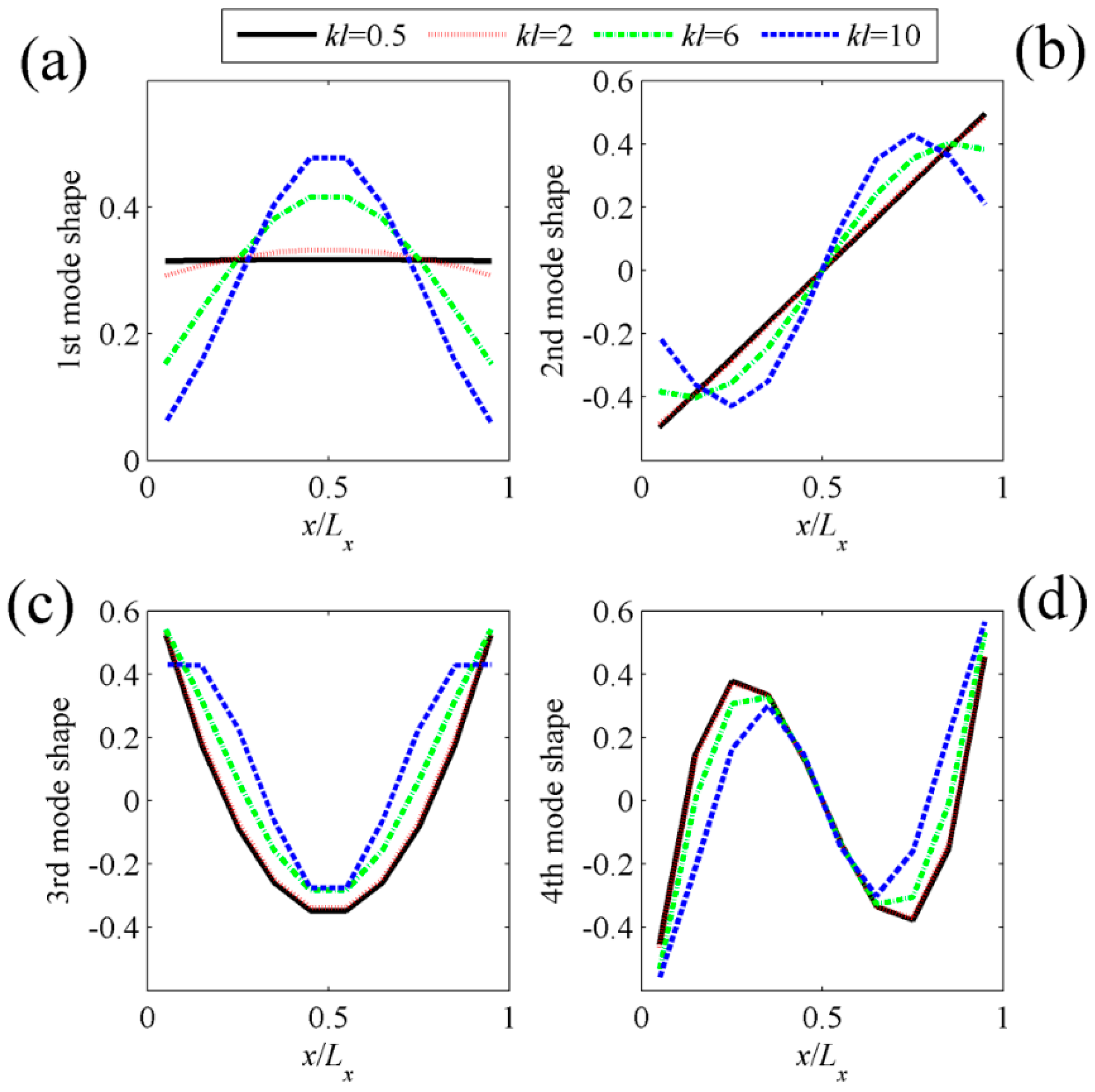
3. Radiation Modes Theory
3.1. V-Mode Approach
3.2. C-mode approach
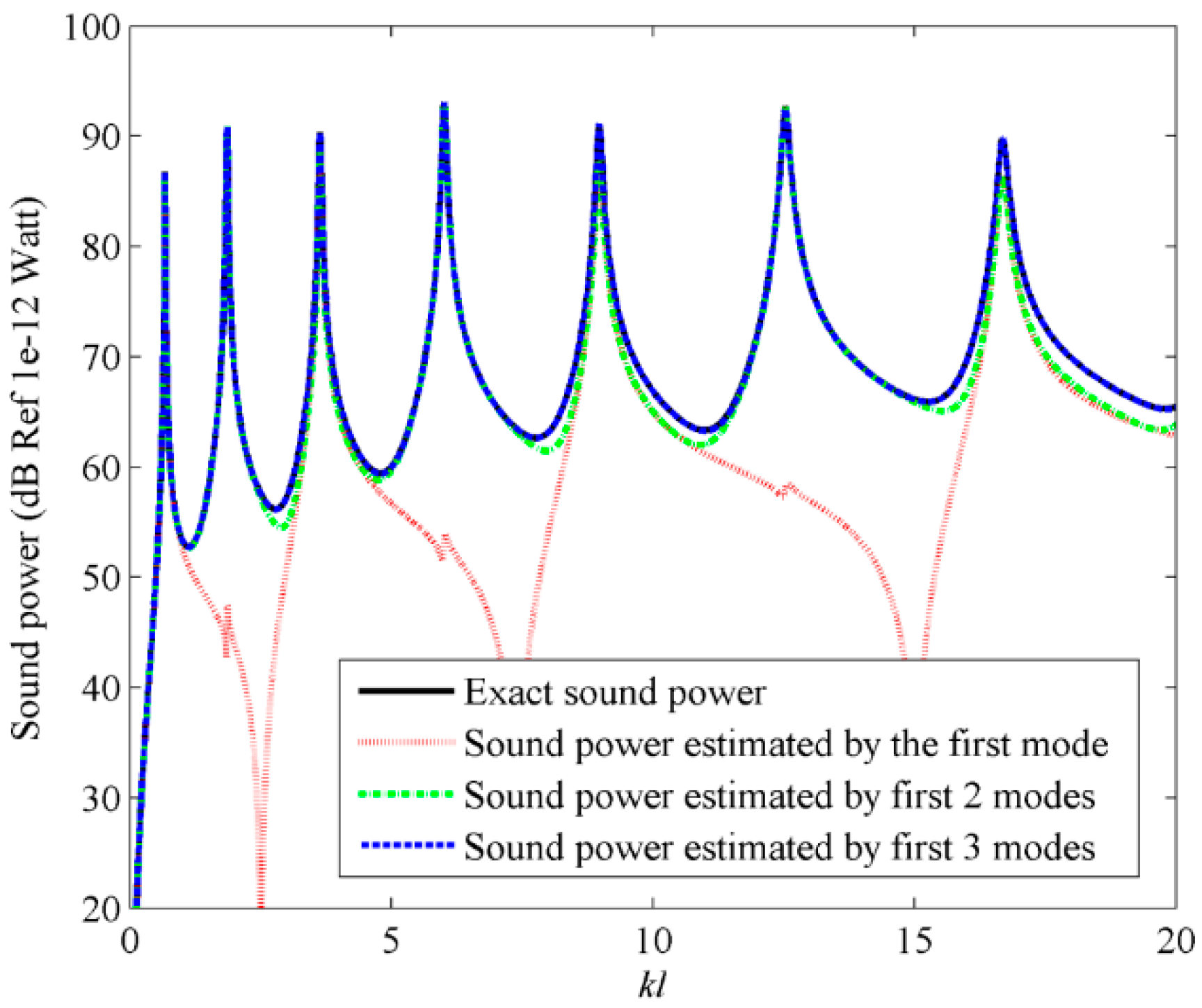
4. Numerical Calculations
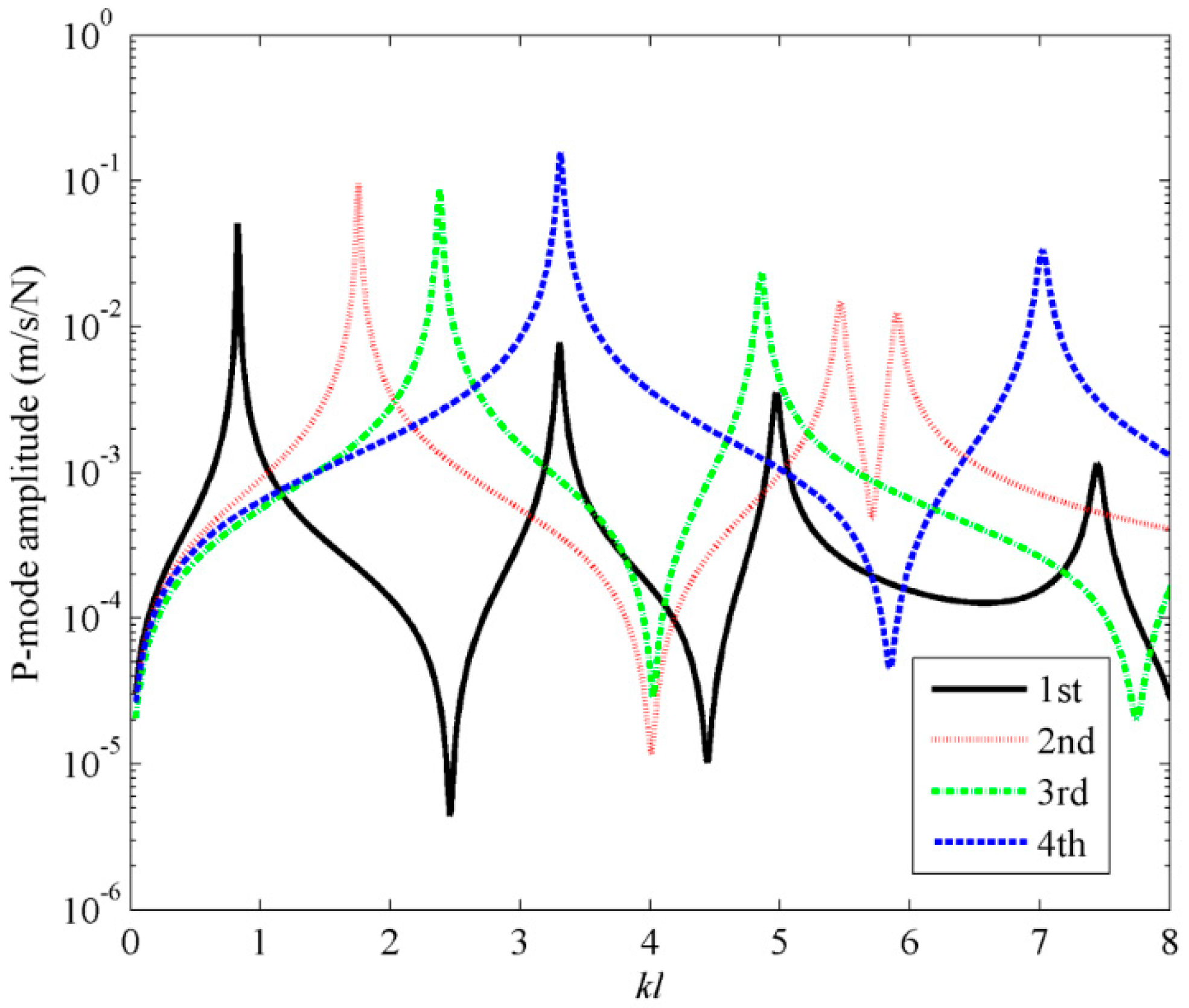
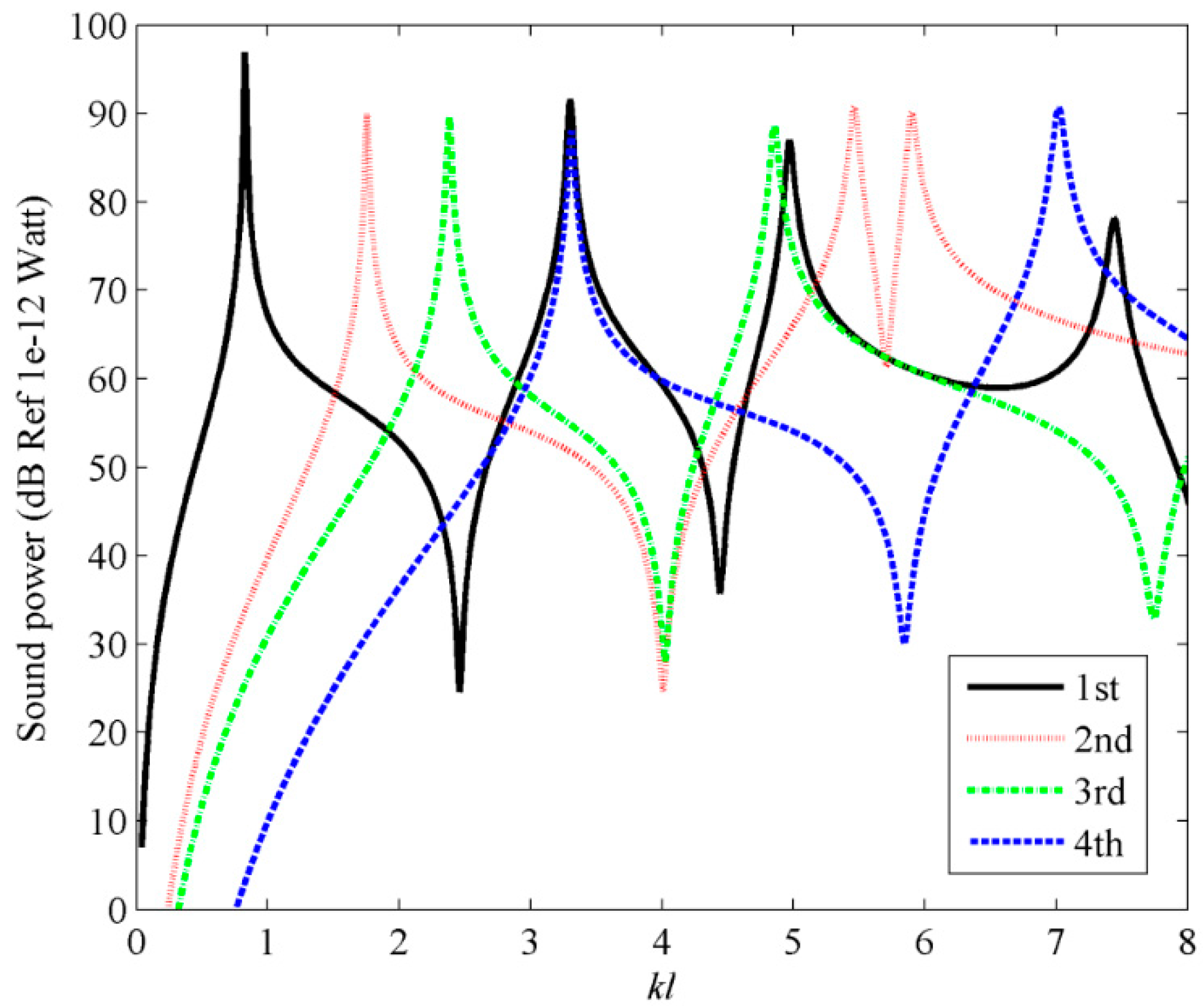
4.1. Sound Power for Beam Structure
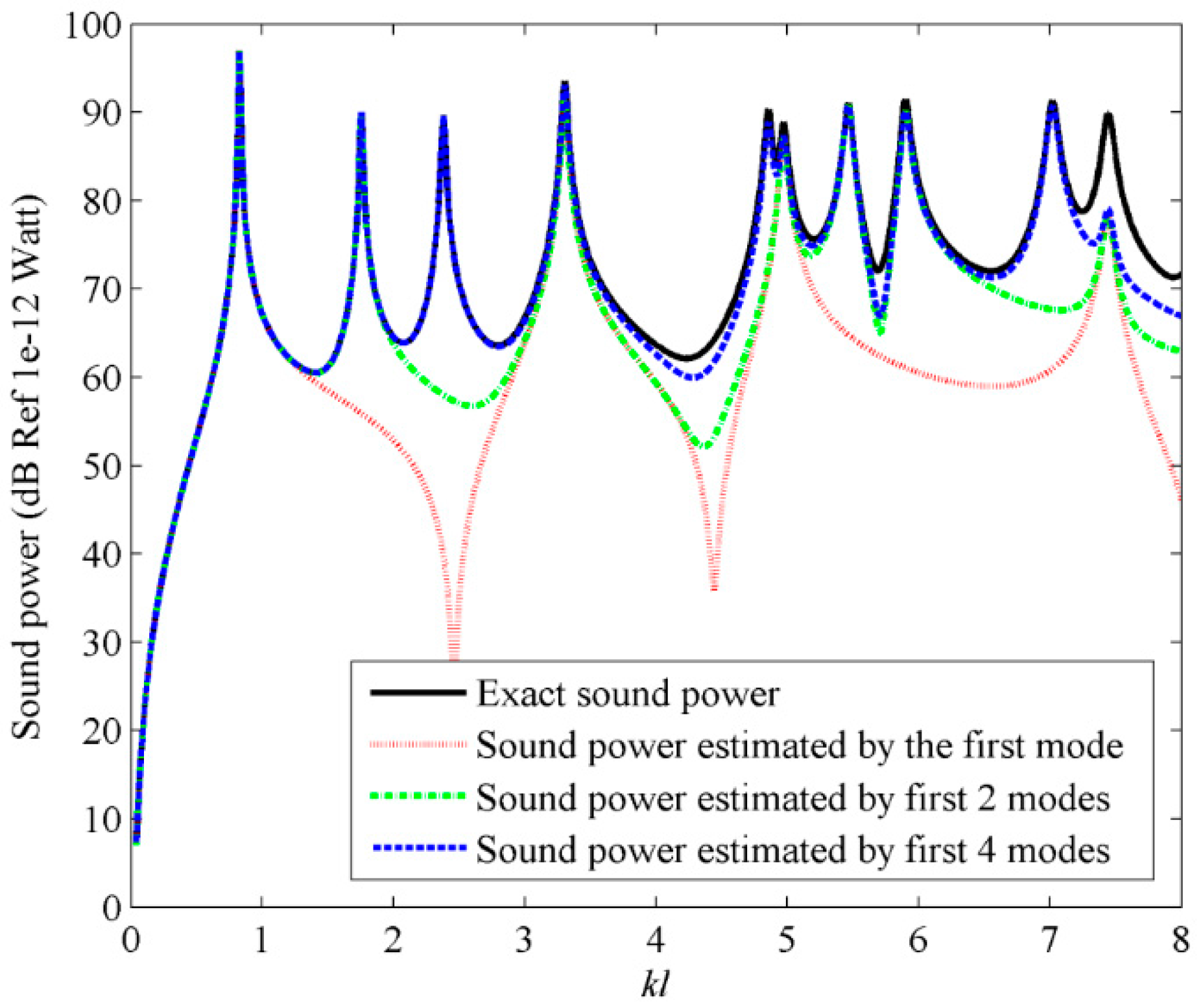
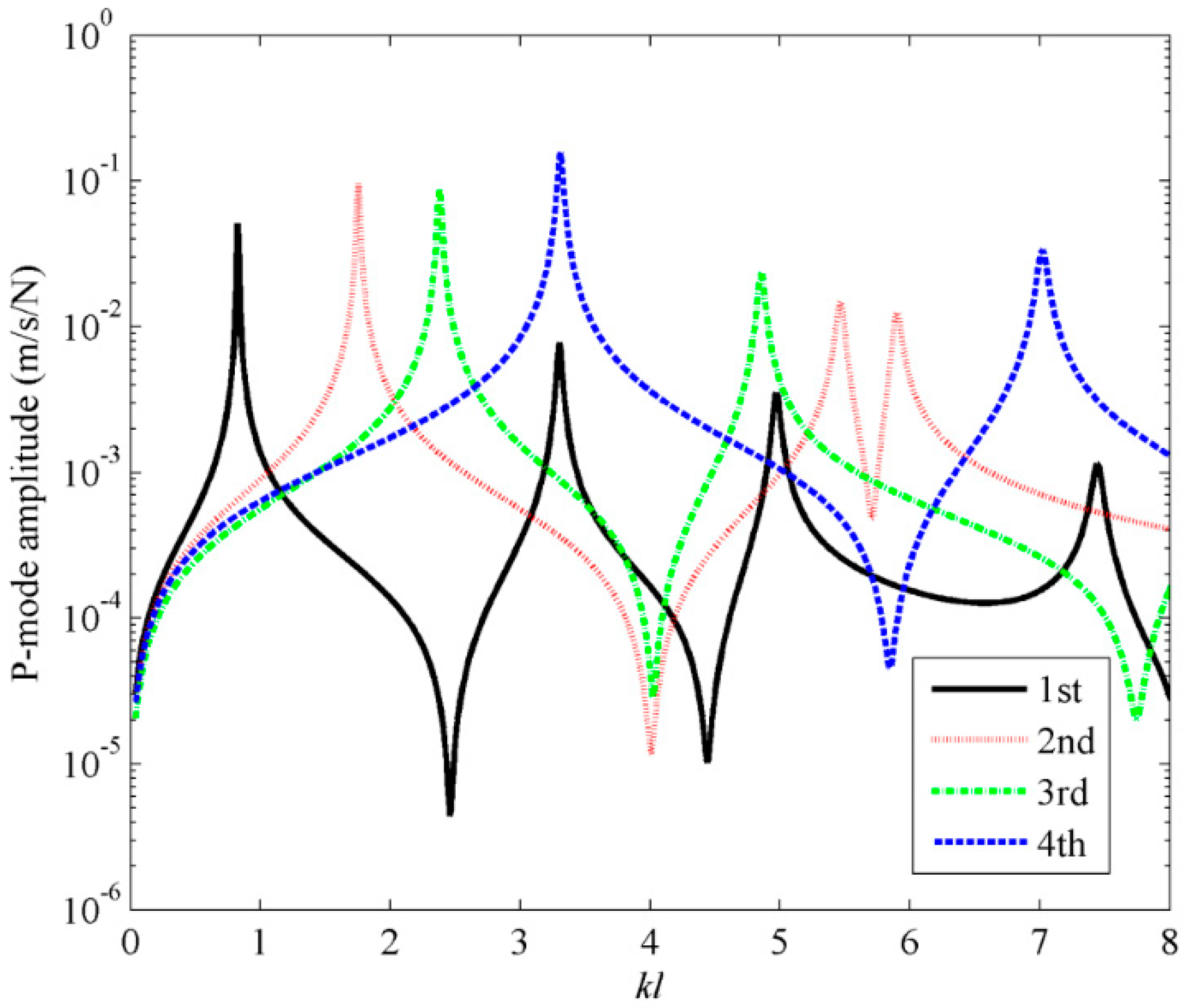
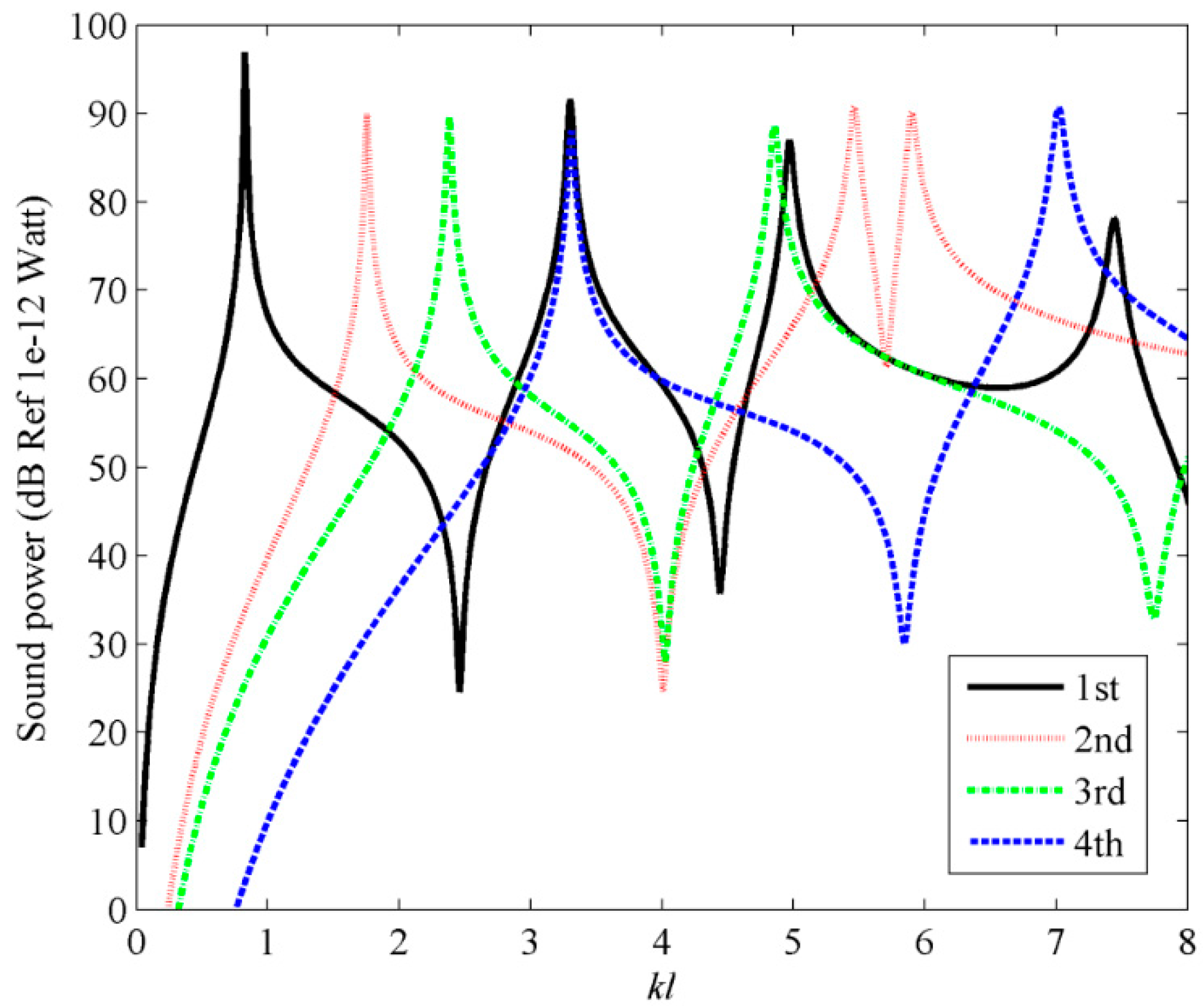
4.2. Sound Power for Plate Structure
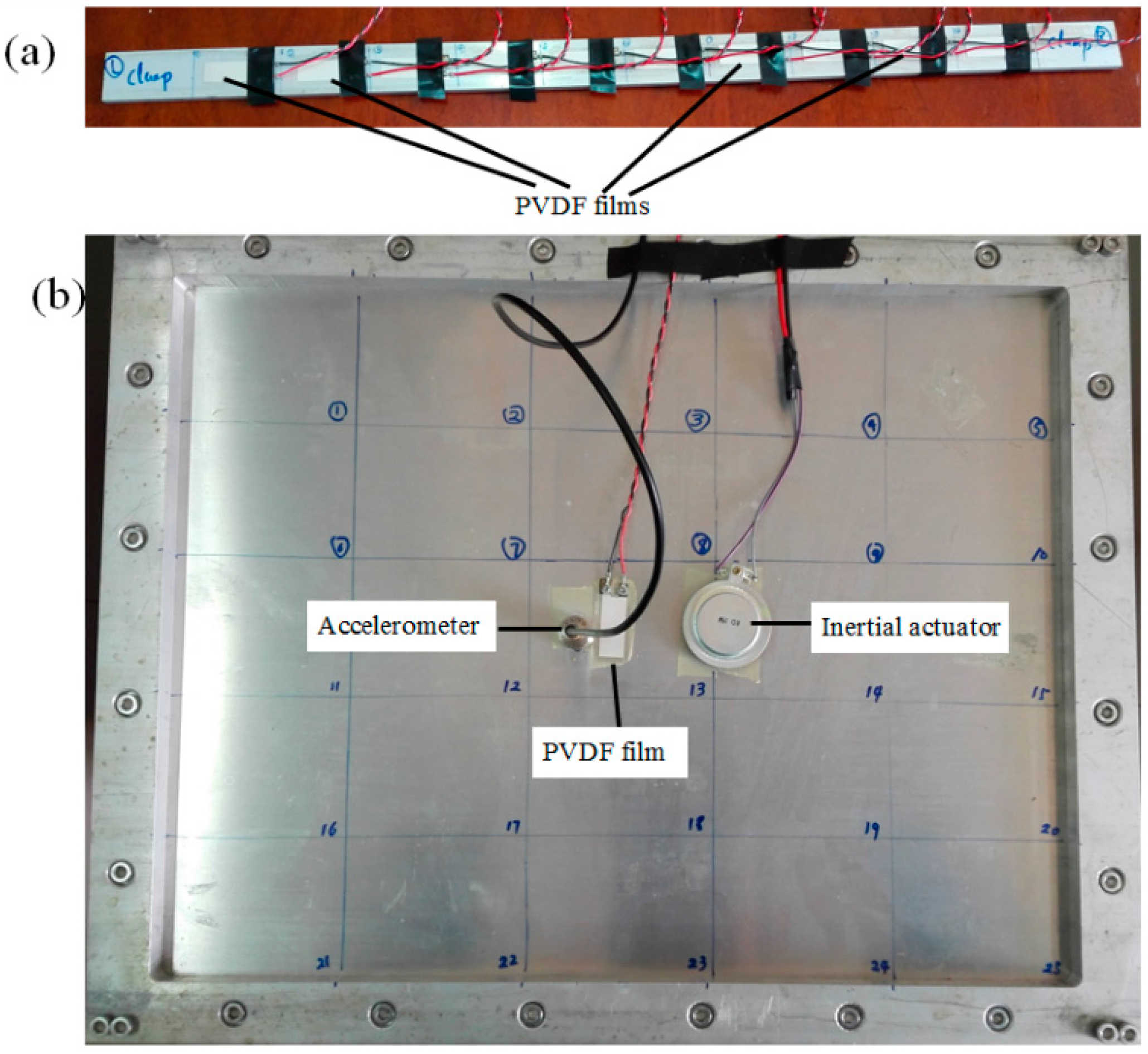
5. Experimental Investigations
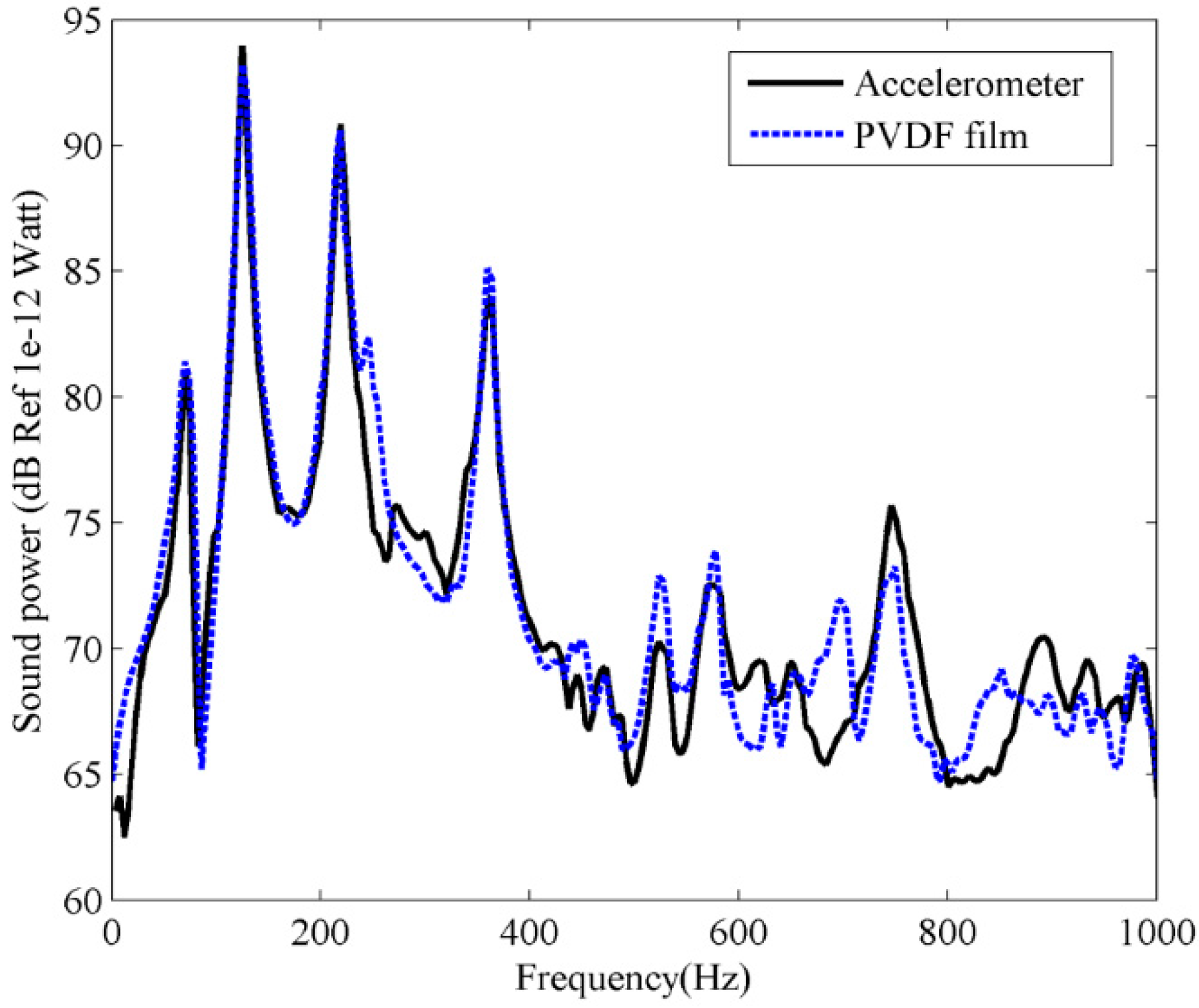
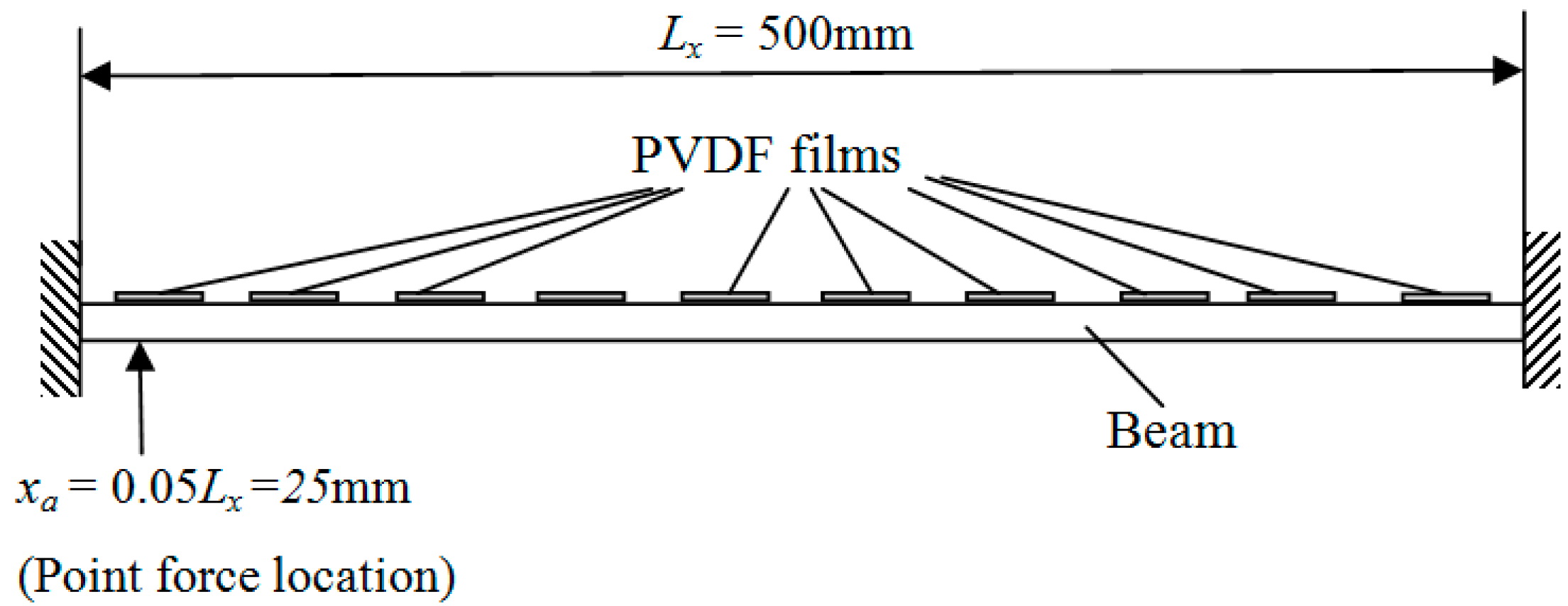
5.1. Sound Power Estimated from the Beam
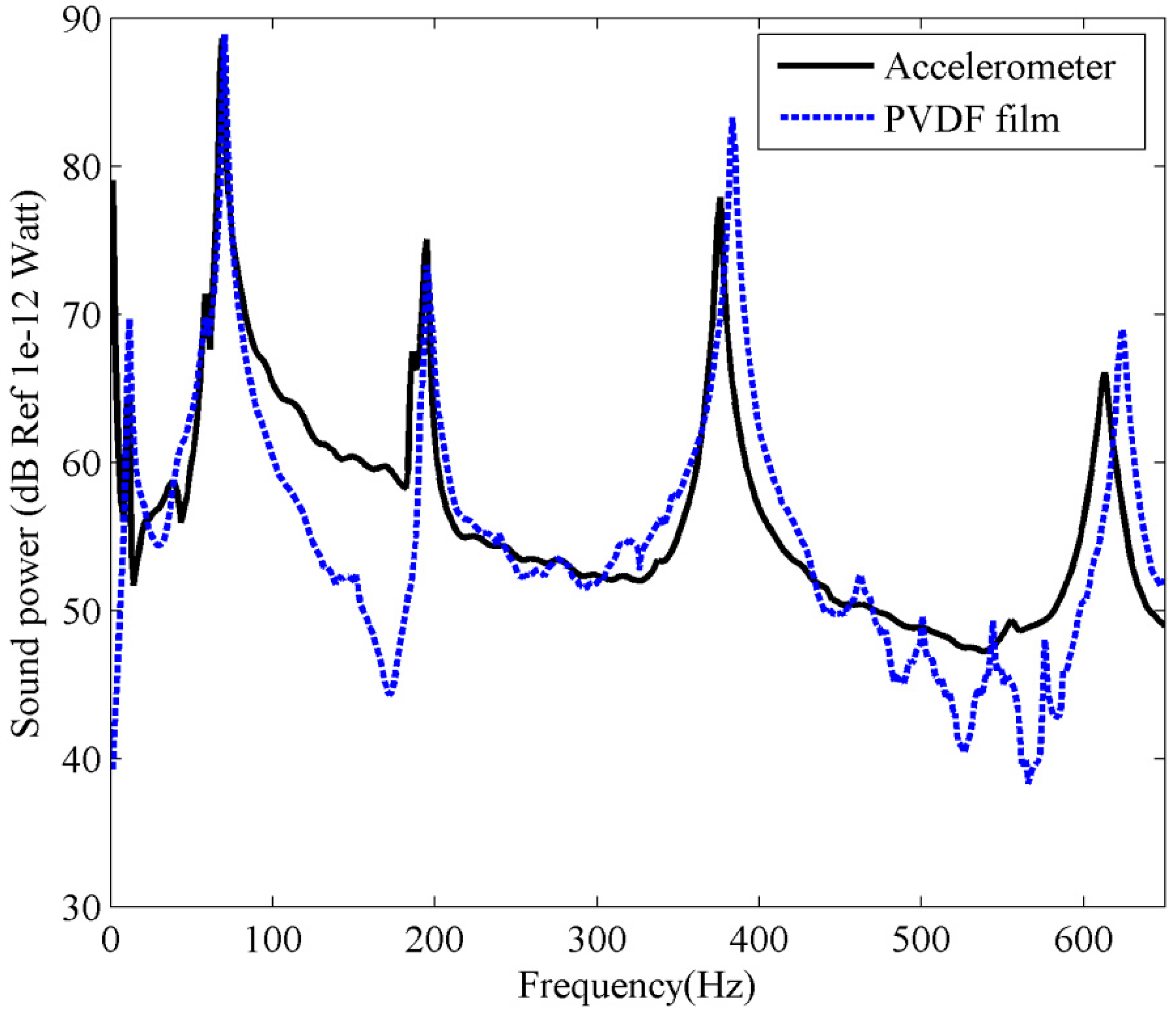
5.2. Sound Power Estimated from the Plate
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Acoustics-Determination of Sound Power Levels and Sound Energy Levels of Noise Sources Using Sound Pressure-Precision Methods for Anechoic Rooms and Hemi-Anechoic Rooms. March 2012. Available online: www.iso.org/standard/45362.html (accessed on 12 May 2017).
- Hasall, J.R.; Zaveri, K. Acoustic Noise Measurements; Bruel & Kjaer: Nærum, Denmark, 1988; ISBN 8788355302. [Google Scholar]
- Borgiotti, G.V. The power radiated by a vibrating body in an acoustic fluid and its determination from boundary measurements. J. Acoust. Soc. Am. 1990, 88, 1884–1893. [Google Scholar] [CrossRef]
- Elliott, S.J.; Johnson, M.E. Radiation modes and the active control of sound power. J. Acoust. Soc. Am. 1993, 94, 2194–2204. [Google Scholar] [CrossRef]
- Cunefare, K.A.; Currey, M.N. On the exterior acoustic radiation modes of structures. J. Acoust. Soc. Am. 1994, 96, 2302–2312. [Google Scholar] [CrossRef]
- Pasqual, A.M.; Arruda, J.R.F.; Herzog, P. Application of acoustic radiation modes in the directivity control by a spherical loudspeaker array. Acta Acust. United Acust. 2010, 96, 32–42. [Google Scholar] [CrossRef]
- Chanpheng, T.; Yamada, H.; Miyata, T.; Katsuchi, H. Application of radiation modes to the problem of low-frequency noise from a highway bridge. Appl. Acoust. 2004, 65, 109–123. [Google Scholar] [CrossRef]
- Tao, J.; Qiu, X. Sensor number requirements for sound power prediction using two different mode decomposition methods. Appl. Acoust. 2009, 70, 646–651. [Google Scholar] [CrossRef]
- Bai, M.R.; Tsao, M. Estimation of sound power of baffled planar sources using radiation matrices. J. Acoust. Soc. Am. 2002, 112, 876–883. [Google Scholar] [CrossRef] [PubMed]
- Ji, L.; Bolton, J.S. Sound power radiation from a vibrating structure in terms of structure-dependent radiation modes. J. Sound Vib. 2015, 335, 245–260. [Google Scholar] [CrossRef]
- Ji, L.; Bolton, J.S. Coupling mechanism analysis of structural modes and sound radiations of a tire tread band based on the S-mode technique. Appl. Acoust. 2015, 99, 161–170. [Google Scholar] [CrossRef]
- Yamaguchi, Z.; Bolton, J.S.; Sakagami, K. Reduction of sound radiation by using force radiation modes. Appl. Acoust. 2011, 72, 420–427. [Google Scholar] [CrossRef]
- Lu, W.; Wu, H.; Jiang, W.; Zhang, Y. A method to compute the radiated sound power based on mapped acoustic radiation modes. J. Acoust. Soc. Am. 2014, 135, 679–692. [Google Scholar] [CrossRef]
- Chen, R.-L.; Wang, B.-T. The use of polyvinylidene fluoride films as sensors for the experimental modal analysis of structures. Smart Mater. Struct. 2004, 13, 791–799. [Google Scholar] [CrossRef]
- Oliveira, E.L.; Maia, N.M.M.; Marto, A.G. Modal characterization of composite flat plate models using piezoelectric transducers. Mech. Syst. Sign. Proc. 2016, 79, 16–29. [Google Scholar] [CrossRef]
- Chuang, K.-C.; Ma, C.-C.; Liou, H.-C. Experimental investigation of the cross-sensitivity and size effects of polyvinylidene fluoride film sensors on modal testing. Sensors 2012, 12, 16641–16659. [Google Scholar] [CrossRef] [PubMed]
- Luo, M.; Liu, D.; Luo, H. Real-time deflection monitoring for milling of a thin-walled workpiece by using PVDF thin-film sensors with a cantilevered beam as a case study. Sensors 2016, 16, 1470. [Google Scholar] [CrossRef] [PubMed]
- Lee, C.K.; Moon, F.C. Modal sensors/actuators. J. Appl. Mech. 1990, 57, 434–441. [Google Scholar] [CrossRef]
- Porn, S.; Nasser, H.; Coelho, R.F.; Belouettar, S.; Deraemaeker, A. Level set based structural optimization of distributed piezoelectric modal sensors for plate structures. Int. J. Solids Struct. 2016, 80, 348–358. [Google Scholar] [CrossRef]
- Mao, Q. Design of piezoelectric modal sensor for non-uniform Euler–Bernoulli beams with rectangular cross-section by using differential transformation method. Mech. Syst. Sign. Proc. 2012, 33, 142–154. [Google Scholar] [CrossRef]
- Mao, Q.; Pietrzko, S. Measurements of local volume displacement using a piezoelectric array. Acta Acust. United Acust. 2006, 92, 556–566. [Google Scholar]
- Preumont, A.; Francois, A.; Dubru, S. Piezoelectric array sensing for real-time, broadband sound radiation measurement. J. Vib. Acoust. 1999, 121, 446–452. [Google Scholar] [CrossRef]
- Tanaka, N.; Sanada, T. Modal control of a rectangular plate using smart sensors and smart actuators. Smart Mater. Struct. 2007, 16, 36–46. [Google Scholar] [CrossRef]
- Trindade, M.A.; Pagani, C.C.; Oliveira, L.P.R. Semi-modal active vibration control of plates using discrete piezoelectric modal filters. J. Sound Vib. 2015, 351, 17–28. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | PVDF Film |
|---|---|
| Length Px (mm) | 30 |
| Width Py (mm) | 12 |
| Thickness(mm) | 28 × 10−3 |
| Desity (Kg/m3) | 1.78 × 103 |
| Poisson’s ratio | 0.28 |
| Young’s modulus (N/m2) | 2–4 × 109 |
| Piezo Strain Constant d31 (m/V) | 23 × 10−12 |
| Maximum Operating Voltage (V/µm) | 750 |
| Relative permittivity ε/ε0 | 12 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, Q.; Zhong, H. Sound Power Estimation for Beam and Plate Structures Using Polyvinylidene Fluoride Films as Sensors. Sensors 2017, 17, 1111. https://doi.org/10.3390/s17051111
Mao Q, Zhong H. Sound Power Estimation for Beam and Plate Structures Using Polyvinylidene Fluoride Films as Sensors. Sensors. 2017; 17(5):1111. https://doi.org/10.3390/s17051111
Chicago/Turabian StyleMao, Qibo, and Haibing Zhong. 2017. "Sound Power Estimation for Beam and Plate Structures Using Polyvinylidene Fluoride Films as Sensors" Sensors 17, no. 5: 1111. https://doi.org/10.3390/s17051111
APA StyleMao, Q., & Zhong, H. (2017). Sound Power Estimation for Beam and Plate Structures Using Polyvinylidene Fluoride Films as Sensors. Sensors, 17(5), 1111. https://doi.org/10.3390/s17051111