1. Introduction
Antenna pose has always played an important role in cellular network planning and optimization, from the era of the 2G network [
1] to the present day (e.g., [
2,
3]). It directly affects signal coverage, soft handover and interference between cells [
4] and indirectly affects other network performance indicators, such as quality of service [
5], and network configuration parameters, such as transmission power [
6]. Thus, determining the pose of an antenna during installation and monitoring its subsequent changes in pose are important tasks.
The pose of an antenna is typically parameterized in terms of its downtilt (or elevation) and azimuth angles (e.g., in [
4]), which are formally defined with respect to the direction of the main lobe [
7]. For the time being, there are two popular approaches to measure the antenna pose in the industry. The first method is to measure the downtilt and azimuth angles manually by a person using an inclinometer and a compass; the second one is to employ specialized sensors, such as the Antenna WASP [
8] from 3Z Telecom™, or portable measurement devices equipped with internal sensors, such as the antenna alignment tool (AAT) [
9] from Sunlight™, to facilitate the measurement process.
However, both methods have their limitations. For the manual measurement, because numerous antennas are mounted on towers that are high off the ground and electrically powered, reaching these antennas takes much effort and poses a high risk for workers. Moreover, it is difficult to guarantee the accuracy and precision of such manual measurements because of individual differences among workers. As for the second solution with sensors, on the one hand, since a single sensor unit like the WASP costs a few tens of U.S. dollars, the gross overhead becomes enormous when the total number of antennas is considered for a large mobile network; on the other hand, portable measurement devices like AAT are usually expensive, and workers still must physically access the antennas to use them.
The recent proliferation of mobile phones with various types of built-in sensors, especially cameras and inertial measurement units (IMUs), has given rise to a wide range of interesting new applications and algorithms [
10] that rely on the fusion of visual and inertial information for use in many fields: for example, object recognition [
11], 3D reconstruction [
12,
13], tracking [
13,
14] and pose estimation [
15]. These studies have inspired us to propose a novel non-contact solution to the measurement problem of the antenna pose in the Earth frame using the camera and IMU data from mobile phones.
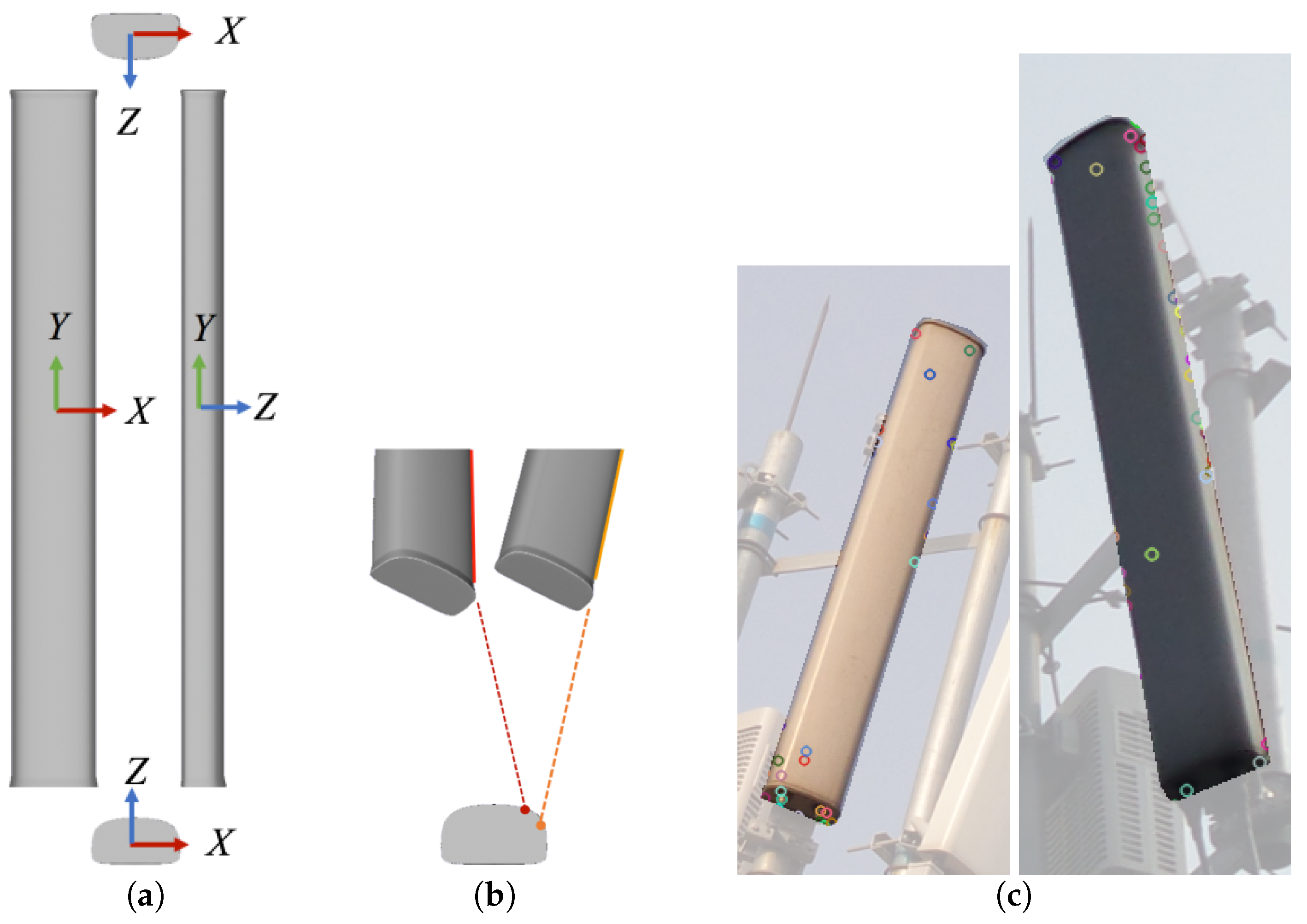
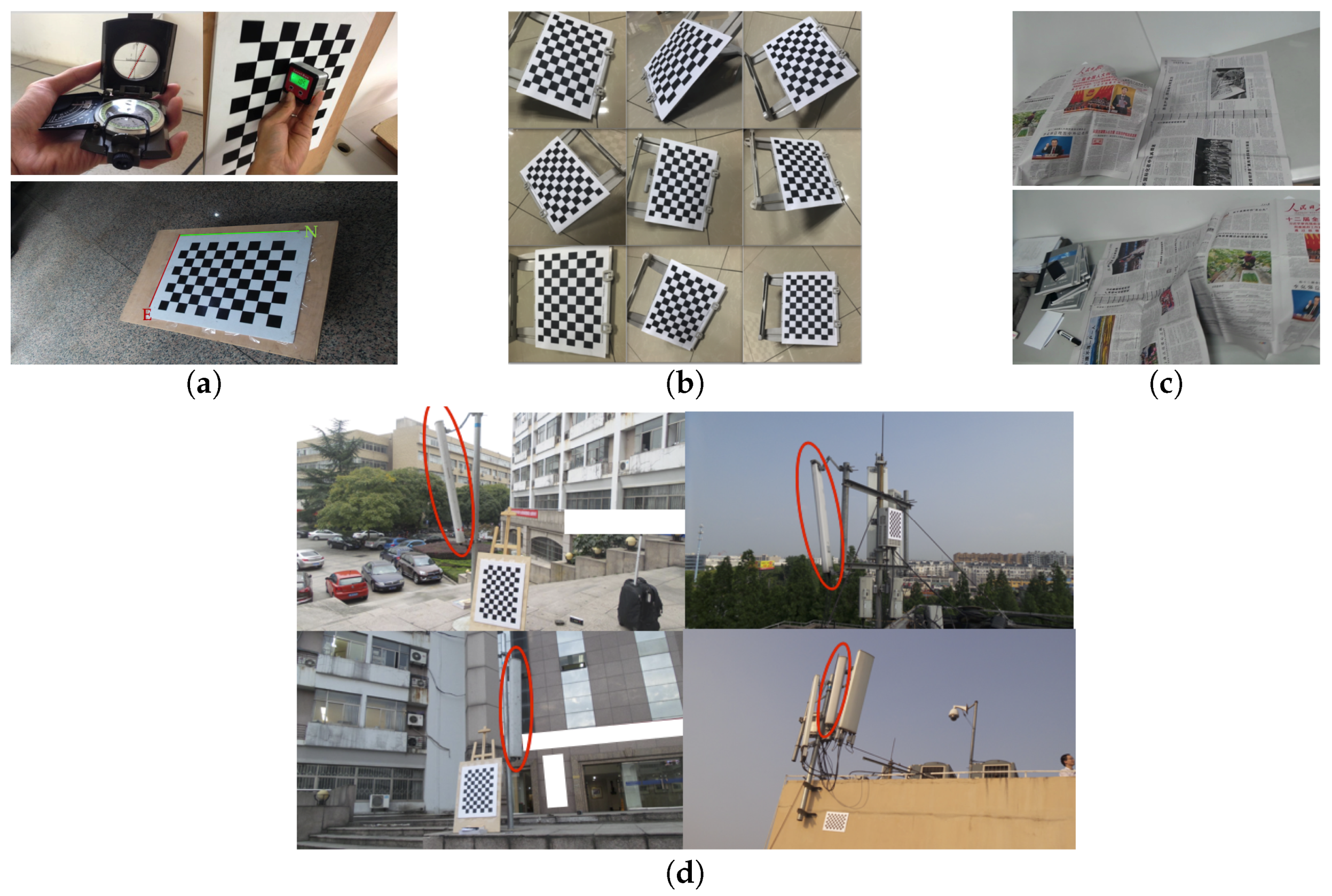
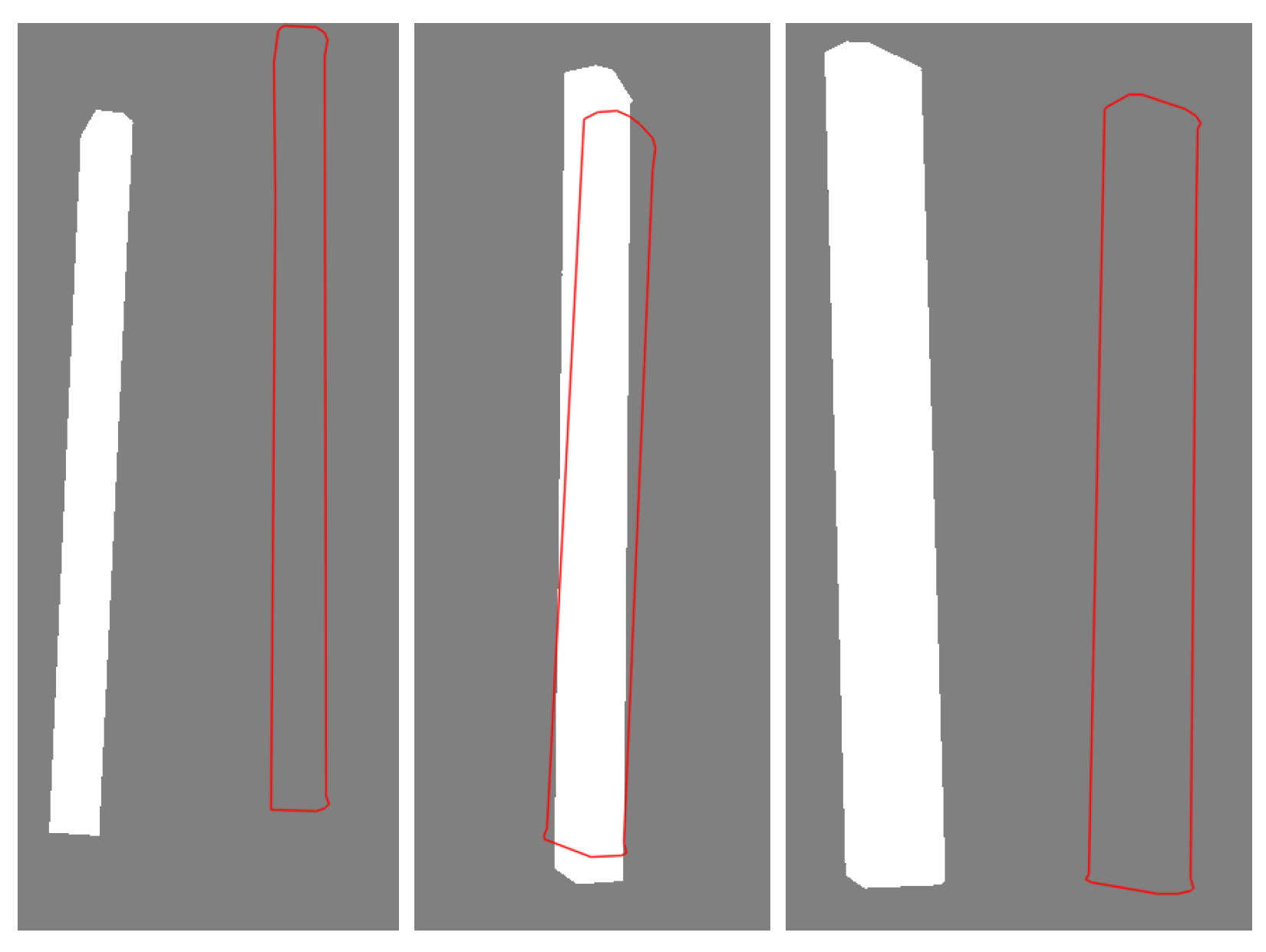
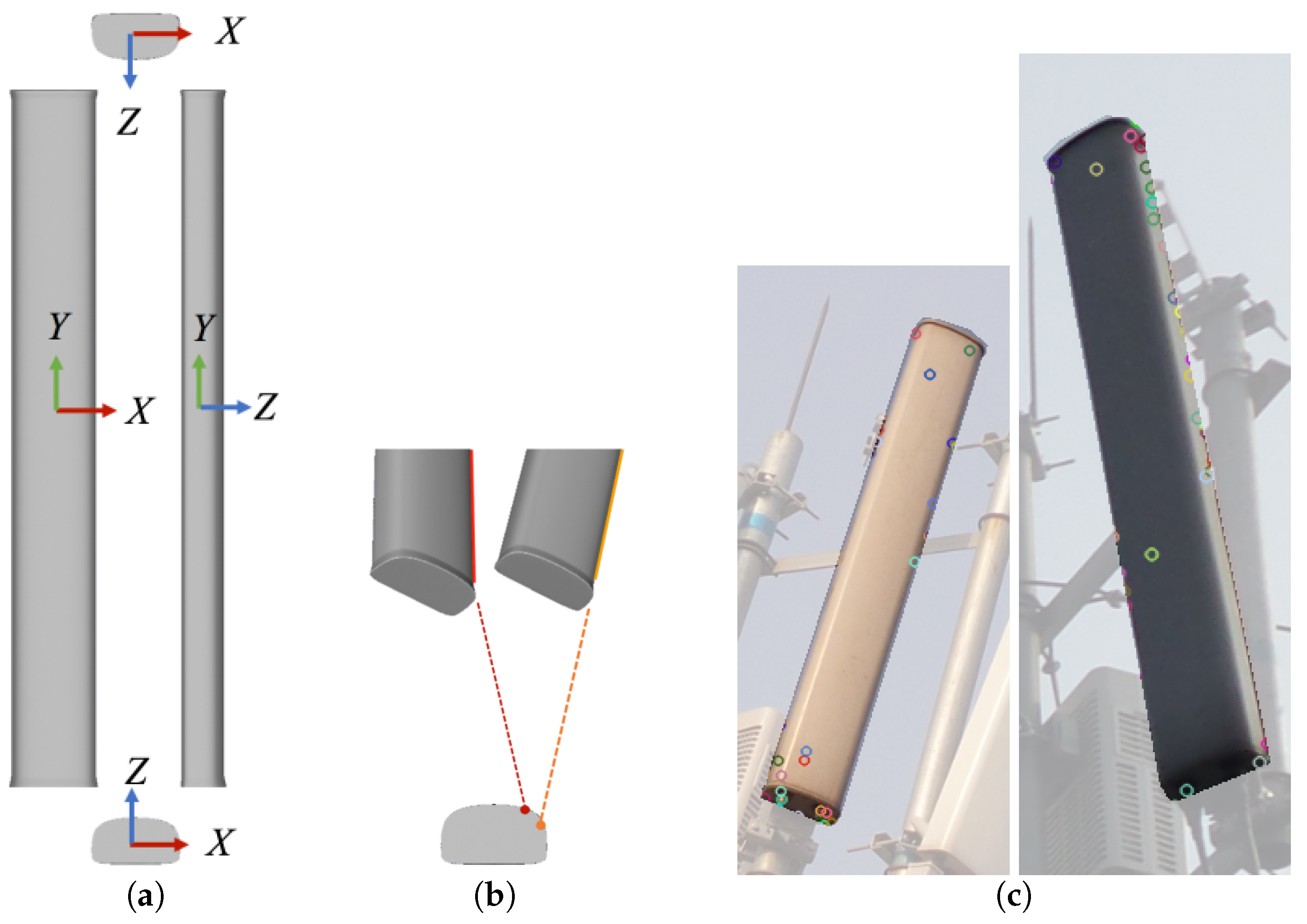
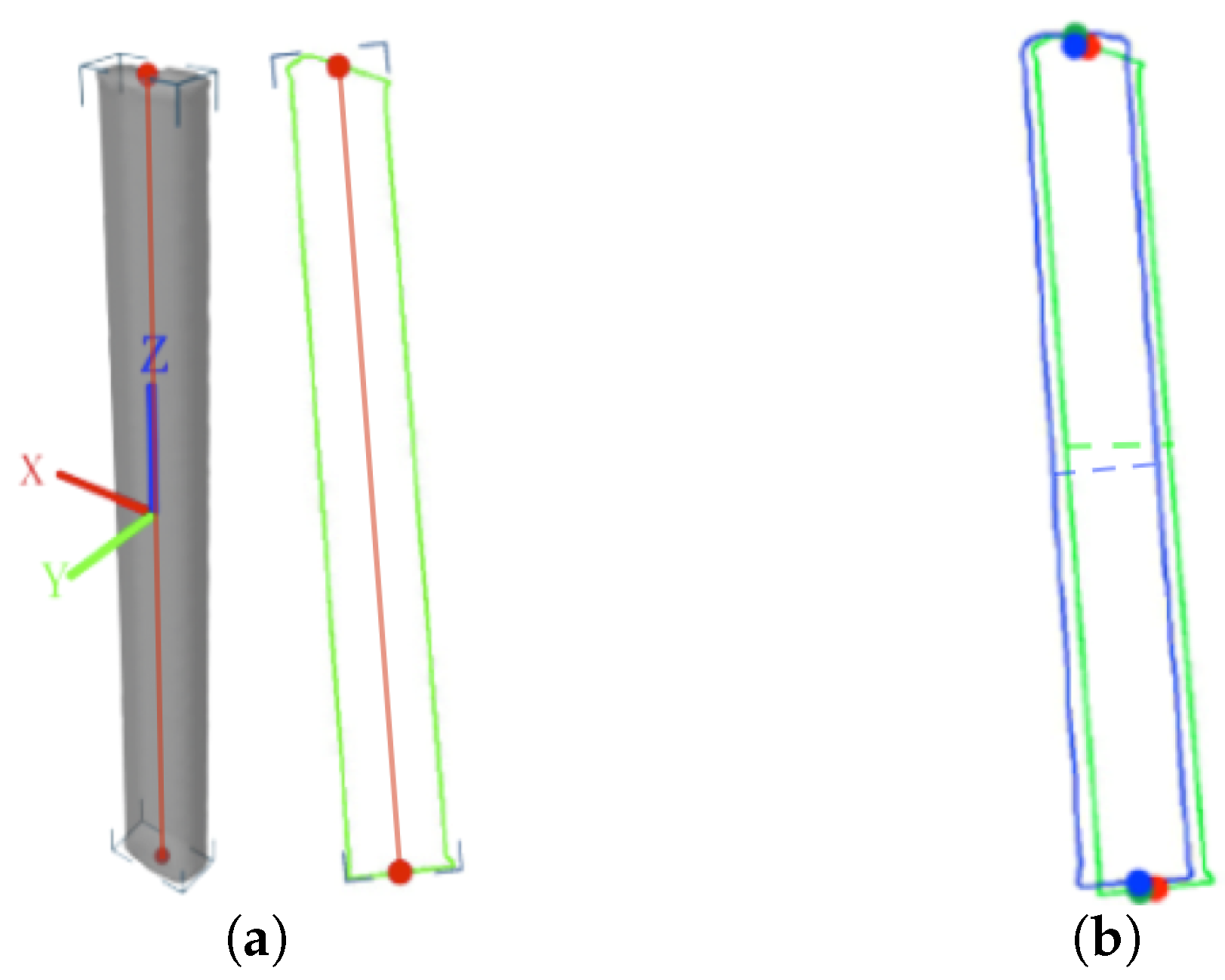
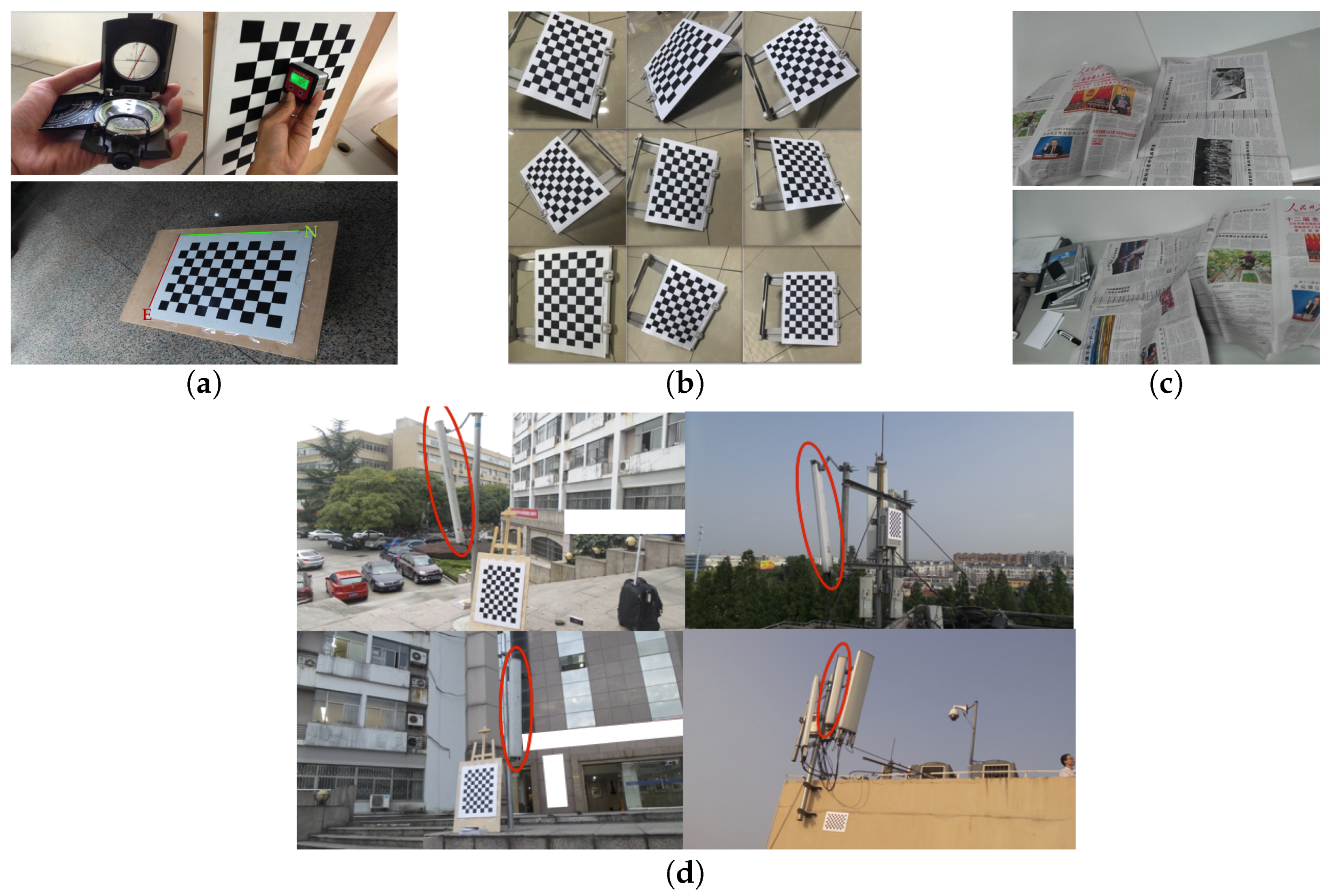
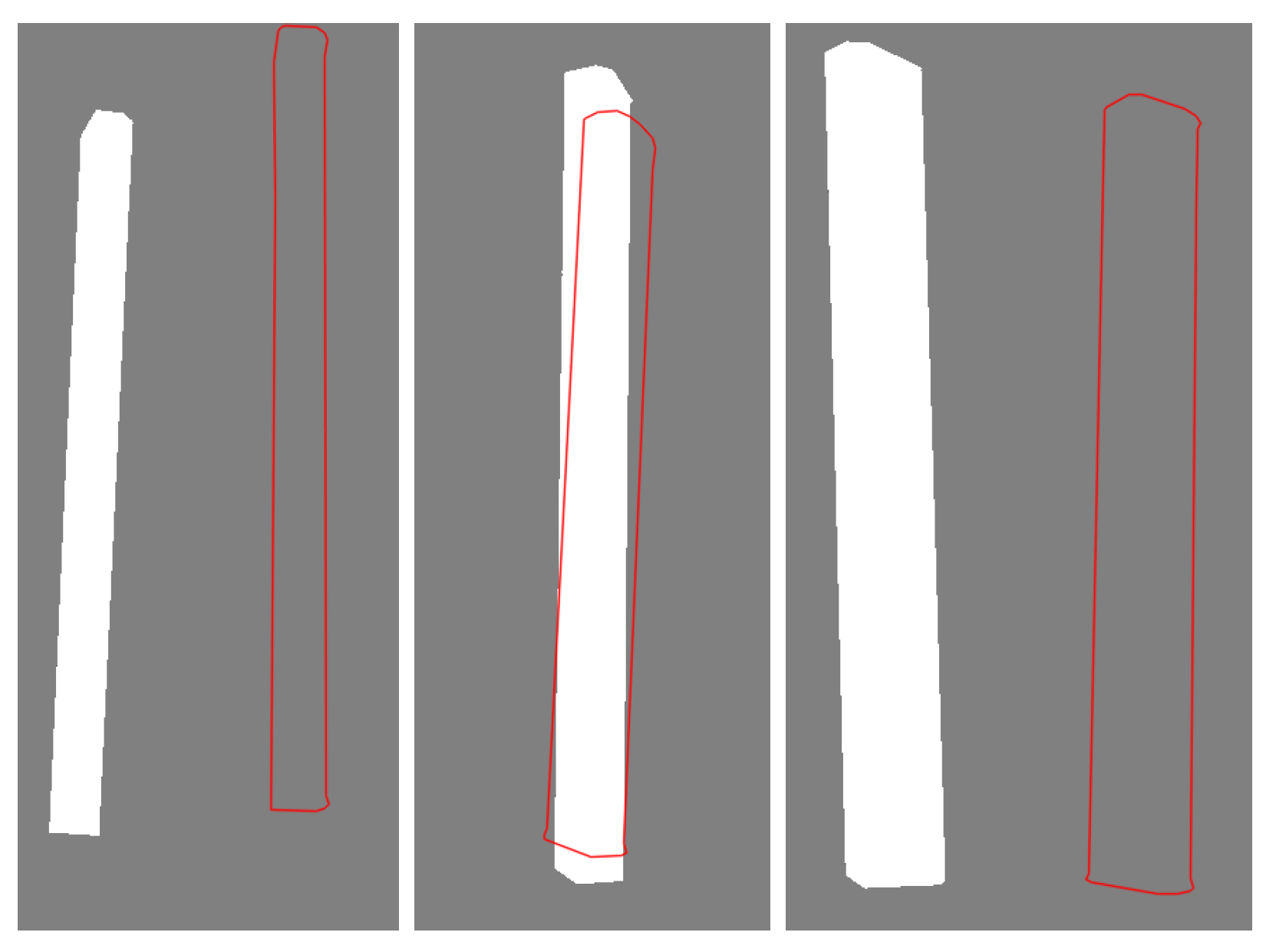
Two technical challenges arise when designing this non-contact approach. First, antennas are only sparsely textured and usually have simple shapes with smooth surfaces (see
Figure 1a), providing a few of the distinctive features and stable matches (see
Figure 1b,c) that are usually required for existing feature-based pose estimation methods. Second, the IMU sensors in mobile phones are usually ultra-low-cost (consumer-level) microelectromechanical system (MEMS) sensors with poor accuracy [
16,
17,
18]; however, accuracy is of key importance for industry applications, such as network optimization [
19].
To address these challenges, we design and develop our solution based on adequate consideration of the characteristics of antennas and the sensors in mobile phones. First, we introduce a 3D antenna model and describe the visual pose estimation problem for an antenna as a direct 2D-3D matching problem based on the outer contours of the antenna to avoid the influence from the antenna’s lack of geometric and textural features. This approach requires prior knowledge of the antenna’s 3D geometry, but this is not yet an excessive requirement because of the limited number of different antenna products that are currently in use. Second, to improve the accuracy of pose estimation, we develop a coarse-to-fine strategy for antenna pose estimation, in which we first find an approximate pose automatically by exploiting the shape characteristics of the antenna and reduce the original unconstrained candidate pose search space to a constrained one, and we then seek an optimal solution in this reduced space using global optimization techniques. Moreover, to reduce the visual-inertial fusion error of mobile phones, we also propose a new camera-IMU calibration method for accurate calculation of the relative poses between the relevant sensors.
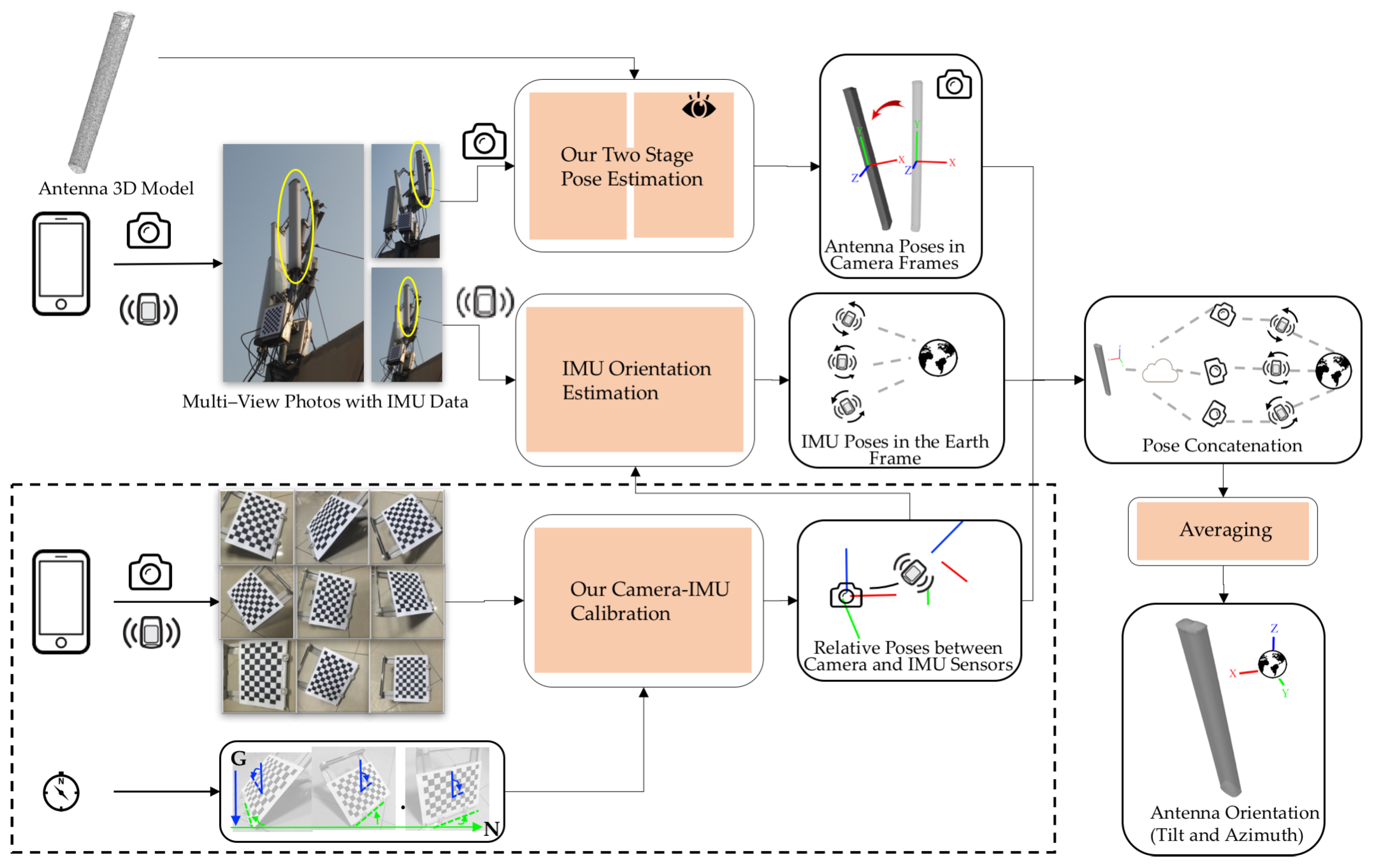
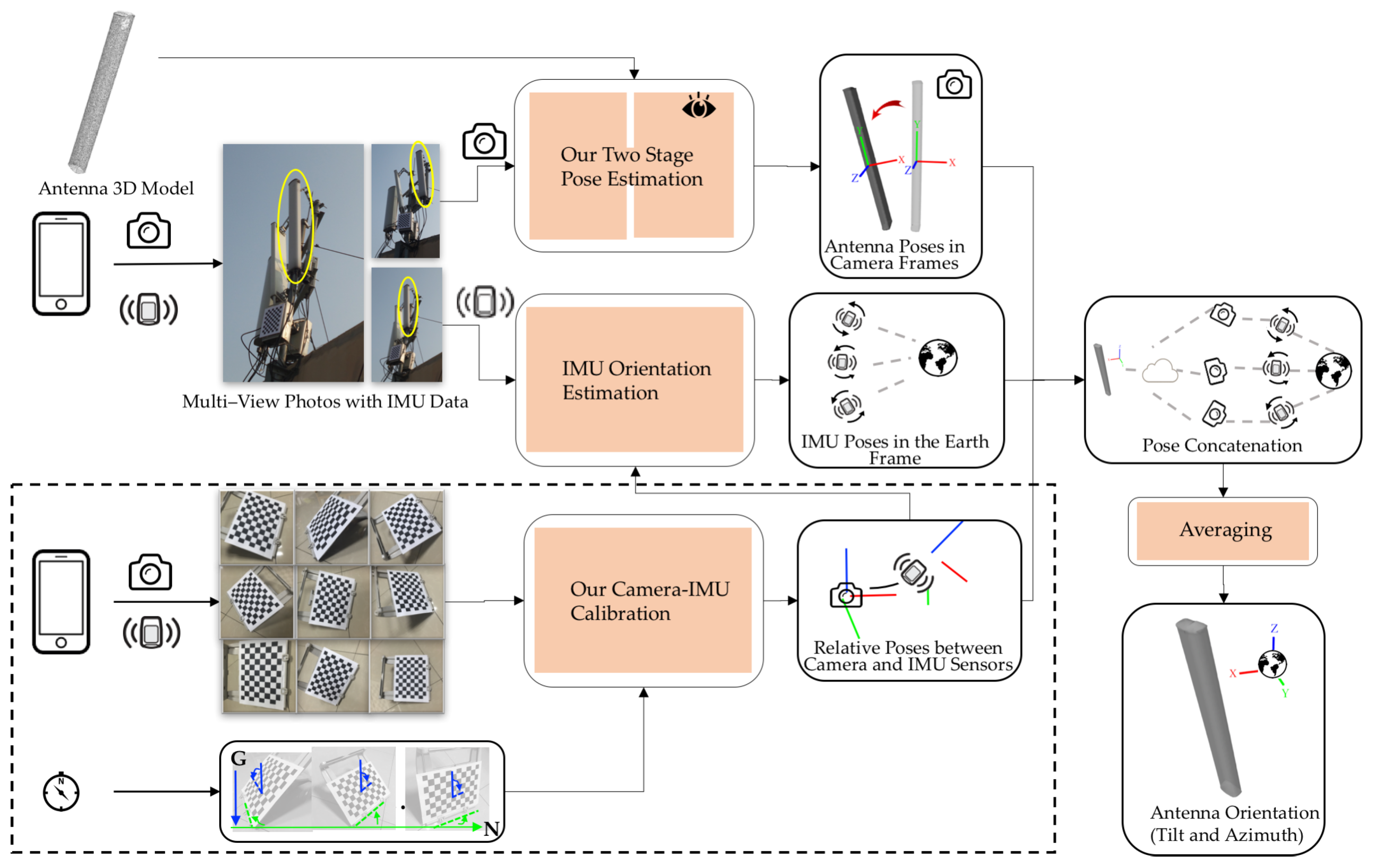
Therefore, we are able to build up a non-contact antenna pose estimation pipeline after addressing these challenging problems. The pipeline consists of three major steps: first, we capture antenna photographs remotely using a mobile phone with an IMU including the magnetometer despite the fact that an IMU is indeed composed of only inertial sensors (i.e., accelerometers and gyroscopes) in a strict way; then, we estimate the pose of the antenna relative to the camera from the images with our coarse-to-fine visual pose estimation method, and we estimate the orientation of the IMU relative to the Earth from the IMU outputs; and finally, the downtilt and azimuth angles of the antenna are calculated by concatenating the two poses with the refined transformation between the camera and the IMU as a result of our camera-IMU calibration method.
Accordingly, our major technical contributions include the following:
We present an accurate solution to the downtilt and azimuth estimation problem for antennas based on multi-view antenna images and IMU data captured by a mobile phone. To the best of our knowledge, this is the first report of a non-contact method of measuring the pose of an antenna using a mobile phone.
We enhance existing camera-IMU calibration models by introducing additional degrees of freedom (DoFs) between the accelerometer and magnetometer, and we define a new error metric based on both the downtilt and azimuth errors instead of a single unified rotational error. This enables us to propose a new camera-IMU calibration method that permits simultaneous improvement of the estimation accuracy for both the downtilt and azimuth angles, making it suitable for tasks in which both types of error are crucial.
We propose an automatic method of determining an approximate pose from multi-view antenna contours for visual pose estimation, and we also provide bounds on the search space for pose refinement, thereby converting the underlying unconstrained optimization problem to a constrained one to allow solutions to be obtained with better accuracy.
The paper proceeds with a review of related works in
Section 2. A formal formulation of the problem and an overview of our estimation approach are presented in
Section 3, and the details of the implementation are given in
Section 4 and
Section 5.
Section 6 describes evaluations of the proposed approach using both synthetic and real-world datasets.
Section 7 discusses and concludes the paper with indications of our future work.
2. Related Work
There is a vast amount of literature related to pose estimation problems, and the most important and most closely related studies are those concerning visual pose estimation and visual-inertial fusion. We will focus on techniques that specifically address visual pose estimation of rigid objects with known geometries and sparse textures, as well as techniques for camera-IMU calibration, which is a key component of visual-inertial fusion.
2.1. Visual Pose Estimation
The general problem of visual pose estimation has been a long-standing topic in computer vision (see [
20] for an early review). By adopting an antenna geometry model, we are formulating the problem as one of a 2D-3D matching in which “3D objects are observed in 2D images” [
20], the goal of which is “to estimate the relative position and orientation of a 3D object to a reference camera system” [
20].
There are two major paradigms for approaching this problem, distinguished by how correspondences are established between the model and the imagery. One is the feature-based approach, in which an image is abstracted into a small number of key-point features. The other is the direct approach, in which image intensities are used directly to determine the desired quantities.
The feature-based approach is typically the most popular solution. The core underlying idea is to compute a set of correspondences between 3D points and their 2D projections, from which the relative position and orientation between the camera and target can then be estimated using various algorithms, such as those for solving the perspective-n-point (PnP) problem [
21]. Consequently, the performance of this approach hinges on whether enough features can be detected and correctly matched. Although numerous feature detection and tracking schemes [
22,
23,
24,
25] have been developed, these methods are unsuitable for textureless objects. Recently, line features, such as the bunch of lines descriptor (BOLD) [
26], have been proposed for handling textureless objects, but on very simple shapes with too few line segments and little informative content, they are still prone to failure. Furthermore, the question of how to build stable 2D-3D correspondences is a topic that is still under investigation.
The direct pose estimation approach attempts to avoid issues of feature tracking and matching by matching model projections to 2D images as a whole. There exists a large class of methods based on template matching. Hinterstoisser et al. proposed a series of template-matching-based methods using inputs based on the distance transform [
27], dominant gradient orientations [
28] and the recently developed concept of gradient response maps (GRM) [
29]; Liu et al. [
30] used edge images and included edge orientations in templates in their fast directional chamfer matching (FDCM). GRM and FDCM are state-of-the-art template matching methods. Once an object is registered using a pre-built template, a refinement process, which is usually based on the iterative closest point (ICP) algorithm [
31], is performed to refine the object’s pose, such as in FDCM. In 2015, Imperoli and Pretto proposed the direct directional chamfer optimization (D2CO) [
32] for pose estimation, in which a non-linear optimization procedure (the Levenberg–Marquardt algorithm) is applied in the refinement stage instead of an ICP-based method, and in a comparison with four ICP-based refinement methods (including FDCM), D2CO demonstrated an advantage in terms of the correct model registration rate. The idea of optimizing the pose parameters has also been pursued in tracking [
33] and simultaneous localization and mapping (SLAM) applications [
34]. As an alternative to the template matching framework, Prisacariu and Reid [
35] introduced a level-set-based modeling method based on a cost function describing the fitness between the estimated pose and the foreground/background models, and they solved the optimization problem using a simple gradient descent approach given an initial pose. Their Pixel-Wise Posteriors for 3D tracking and segmentation (PWP3D) method has been widely used in tasks of simultaneous segmentation and pose estimation, and as a subsequent improvement to PWP3D, Zhao et al. [
36] proposed a boundary term to PWP3D (BPWP3D) , which offers finer boundary constraints for more challenging detection environments. However, these (local) optimization-based methods depend on the initial parameters and may become trapped in local optima.
Our pose estimation method predominantly belongs to the second category. By exploiting a shape prior for an antenna and matching its geometric features, we automatically find an initial pose to avoid potential human interaction and any overhead incurred for the building and matching of templates. Moreover, in the subsequent pose refinement step, we construct bounds on the pose search space to transform the original unconstrained optimization problem into a bounded one, which is then solved using global optimization techniques.
Recently, depth cameras have begun to be used for 3D pose estimation. However, current consumer-level depth cameras are not capable of detecting objects at long distances. For example, the maximum detection distance for a Kinect v2 is 4.5 m. Therefore, such approaches have limited applicability to our problem.
2.2. Camera-IMU Calibration
To relate measurements in the camera frame to the Earth frame, the relative pose between the camera and the IMU (i.e., the rigid transformation between the two frames) should be known. The process of determining this transformation is usually referred to as camera-IMU calibration [
37].
Fleps et al. [
38] classified the existing approaches into two categories: approaches that require specialized measurement setups and facilitate closed-form solutions and filter-based approaches with approximate solutions. Mair et al. [
39] categorized the approaches into three classes: methods with closed-form solutions, Kalman-filter-based methods and methods that make use of optimization techniques. Here, we offer a review from another perspective, based on the hardware configurations used in the various calibration methods, leading to two groups.
Methods in the first group rely on the gyroscope in an IMU. A prevalent practice is a filter-based approach in which the calibration parameters are integrated into the state vector of an IMU motion filter (e.g., [
40,
41] (see [
42] for an overview)) and are solved simultaneously with other motion states. However, as noted by Maxudov et al. [
43], a long state vector naturally imposes certain limitations on accuracy. Moreover, the filter-based framework is unnecessary for offline calibration; based on this insight, Fleps et al. [
38] modeled the calibration problem in a non-linear optimization framework by modeling the sensors’ trajectory. In these methods, the camera is in constant motion, and over-simplifying the model of a camera on a mobile phone by using a global-shuttered model instead of a rolling-shuttered model may cause problems, as revealed in more recent works [
44,
45].
The methods belonging to the other group considered here are also suitable for use with gyroscope-free IMUs. These methods are closely related to hand-eye calibration, or, more concretely, eye-in-hand calibration, an approach used in the robotics community in which the relative pose between the camera and a rigid rig is sought. Since it was first proposed by Shiuand Ahmad in 1989 [
46], hand-eye calibration has been largely considered a solved problem (see [
47] for a review), and recent research has mainly focused on the development of more powerful solvers [
48]. In camera-IMU calibration, the role of the “hand” is played by an accelerometer or an accelerometer-magnetometer pair. In the first complete camera-IMU calibration procedure, proposed by Lobo and colleagues [
37], the authors estimated the rigid rotation between the camera and accelerometer as a standalone step in which the rotation was estimated by having both sensors observe the vertical direction in several poses. The camera relies on an ideally vertically placed checkerboard and the accelerometer on gravity to obtain a vertical reference. Their work was released as a [
49] toolbox and is widely used. In Vandeportael’s work on a camera that knows its orientation (ORIENT-CAM) [
50], a similar idea was applied. However, since the IMU used in ORIENT-CAM consists of an accelerometer and a magnetometer, the relative rotation is estimated by aligning observations of the Earth frame from the IMU and the camera by means of a checkerboard that is ideally laid out such that it is both perfectly horizontal and perfectly northward-oriented. This method requires a carefully placed reference, as in [
37], and any error during setup directly introduces bias into the calibration results. Under the assumption of negligible camera translations during the calibration process, in their work on ego-motion [
51], Domke and Aloimonos solved for the rotation between the camera and accelerometer by relating gravity observations in IMU frames with the motion of the camera. By considering the relative rotations between different camera frames, they avoided the need for artificial references requiring a rigorous setup.
Our calibration method belongs to the second category. Unlike existing approaches, we consider the difference in precision between the two IMU sensors in a mobile phone and use a finer-grained error metric consisting of two terms, instead of a unified one (as in [
50,
51]), to reflect the resulting effect. Moreover, we do not assume perfect accelerometer-magnetometer alignment during the assembly of the sensor hardware and thus are able to decouple the accelerometer-related error and the magnetometer-related error. The reasons that we do not adopt a method of the first category are as follows: (1) the dynamic features of the gyroscope and the moving camera are nonessential to our measuring problem, in which instantaneous sensor outputs are employed; and (2) a calibration method that is independent of the gyroscope is applicable to a wider range of devices.
3. Problem Formulation and Method Overview
Our goal is to estimate the antenna pose in the Earth frame from multi-view data, which consist of multi-view images of the antenna and IMU (accelerometer and magnetometer) measurements recorded at the exact same instant as each image capture. Below, we first formally define the problem and then present an overview of our solution.
3.1. Notation and Problem Formulation
As described in the Introduction, the number of different antenna types in use is quite limited, and therefore, it is reasonable to assume a known 3D antenna geometry once we have identified the antenna type from the acquired images. Let this geometry be denoted by , and let us assume that the bounding box of the model is centered at the origin point of the object frame (OF) and that its three axes are aligned with the axes of OF, without loss of generality.
In each of the multi-view images, the antenna (treated as the foreground) is represented by a contour expressed as a list of connected points, denoted by
where
P is the number of viewpoints. Such contours can be the outputs of a procedure based on image segmentation, shape detection or human interaction during image capture; we do not discuss this procedure here. This representation discards any textural information and interior shape information for an antenna, making it generally impossible to obtain a unique pose solution from a single viewpoint. Nevertheless, we opt to simply ignore these two kinds of information because of their instability, as demonstrated in
Figure 1. Instead, contours captured from multiple viewpoints enable the determination of a unique solution.
The 3D mesh and the 2D images are related by camera projections. We model the phone camera as a pin-hole camera, which maps first from OF into the camera frame (CF) via an unknown rigid transformation and then into the image plane via a perspective function. The projective function is determined by a set of intrinsic parameters of the camera, denoted by K, which is taken to consist of known constants for a pre-calibrated camera.
In addition to the images, the other important half of the multi-view data consists of the IMU measurements, which encode the orientations of the IMU in the Earth frame (EF) when the images were captured. The directions of gravity and magnetic north at a given point on Earth define EF in that location, and the accelerometer and magnetometer sensors of the IMU respond to the gravitational force and magnetic flux, yielding their projections onto the sensor axes. We let , denote the overall IMU measurements, where denotes an accelerometer measurement and denotes a magnetometer measurement.
To ensure an accurate formulation of the problem, there are two small misalignments that we should consider. First, the accelerometer frame, denoted as
A, should ideally coincide with the magnetometer frame, denoted as
M, such that the orientation of the IMU in
EF can be determined from the outputs of these two sensors (e.g., [
52]). However, because the sensor hardware usually resides on different chipsets in a mobile phone, a small rotation may exist between the two sensor frames. Moreover, other environmental factors (especially magnetic factors) may affect the rotation of each sensor frame, thereby worsening the misalignment. Let this unknown rotation be denoted by
, which we can then use to re-align
A and
M once it is known. For convenience, we also regard
A as the overall IMU frame (
IF) when doing so will not cause confusion. Second, the frames of the camera module and IMU module in a mobile phone should also ideally be perfectly aligned, differing only by exchanges in the directions of the axes, which is also generally not true in reality. We describe the true relation as a rigid transformation
,
(or
,
), and although it is easy to obtain an approximation of the relative pose between the camera and IMU frames from the mobile phone API, finding the precise transformation requires greater effort. For the pose estimation problem, we temporarily take these two misalignments as priors.
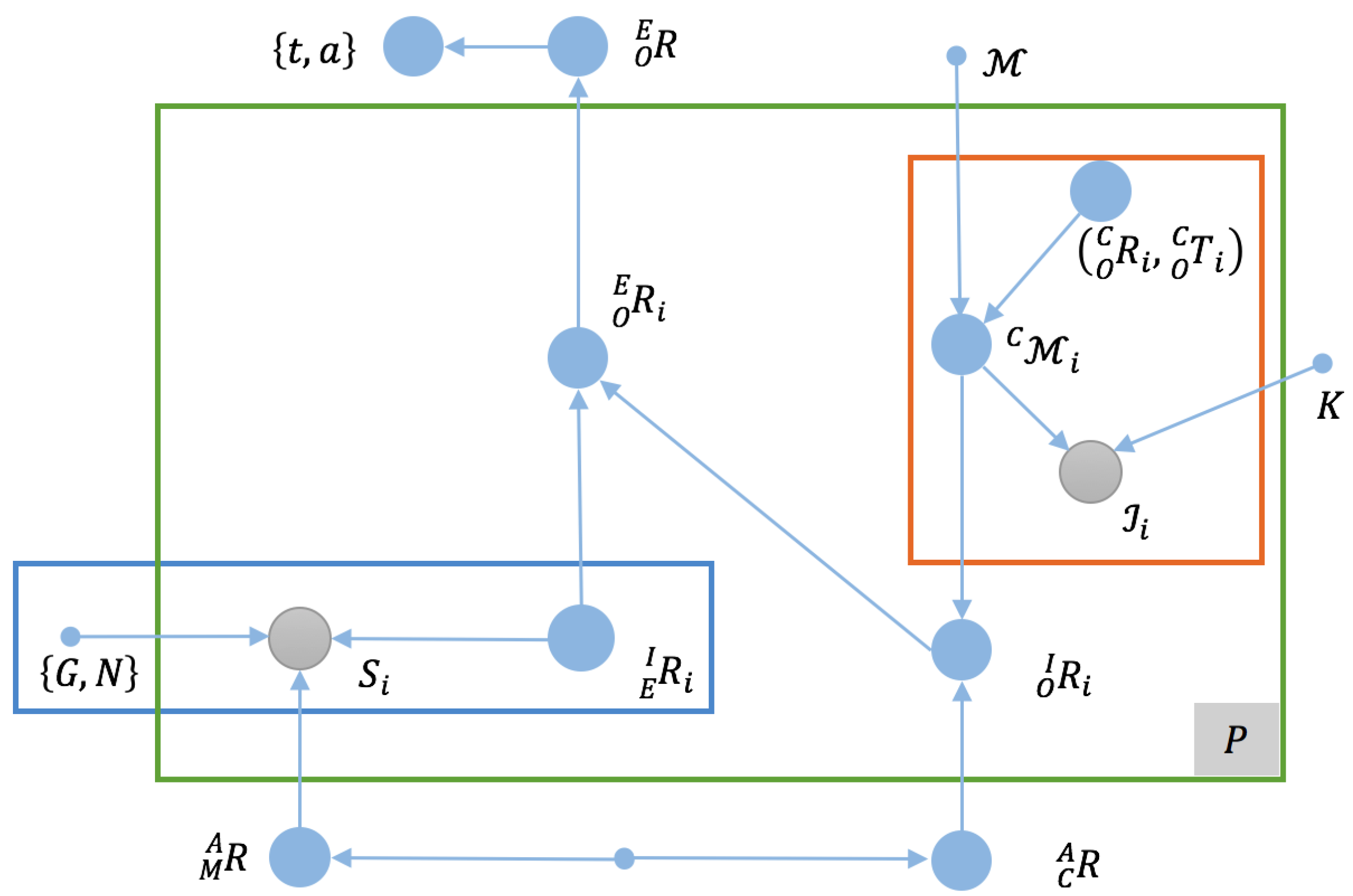
Our final goal in the estimation problem is to determine the antenna’s downtilt and azimuth angles in the Earth frame, which together represent the rotation of the antenna relative to EF, denoted by . The symbol of O represents the object coordinate frame of the antenna.
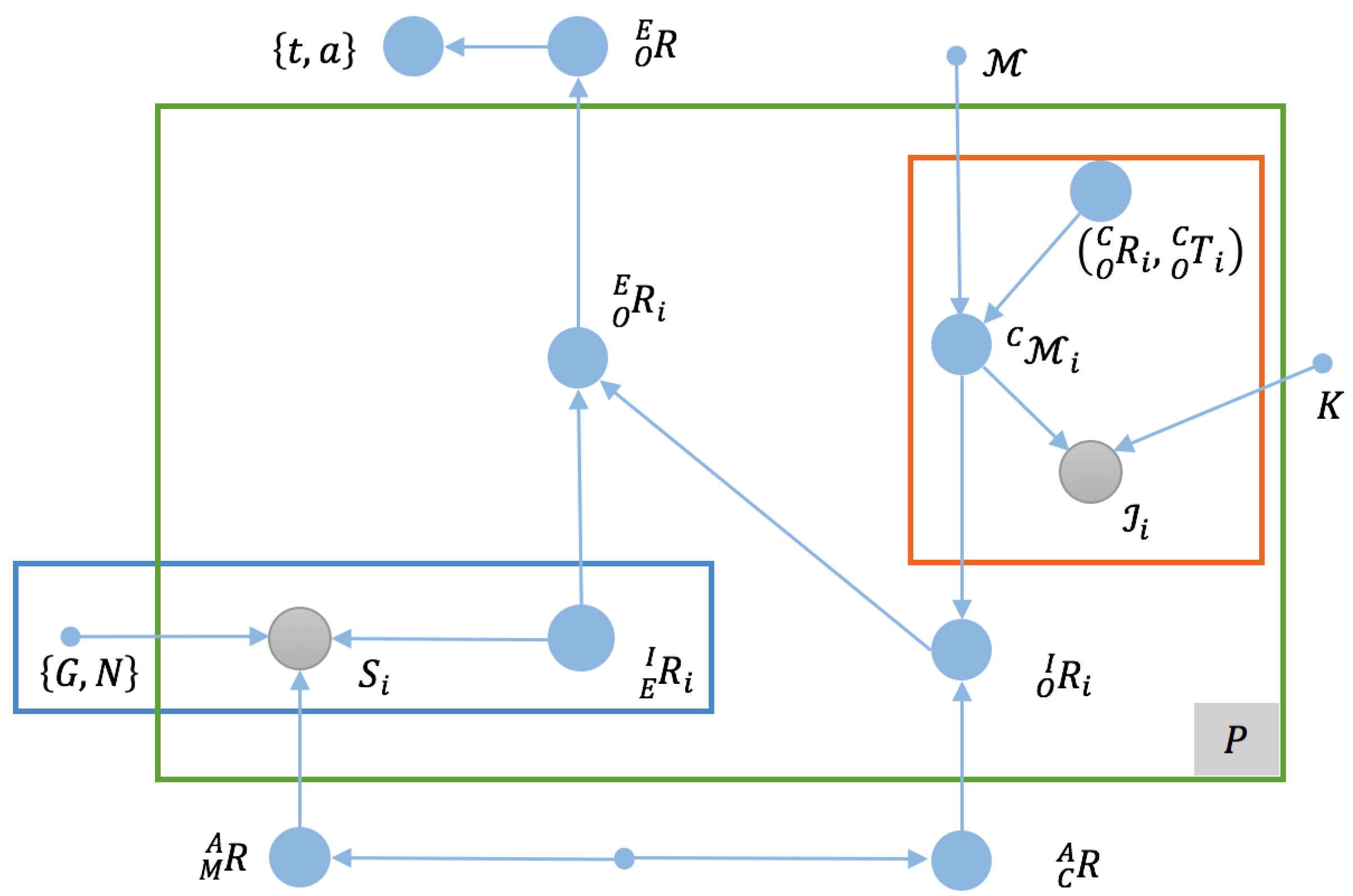
We summarize these quantities and their relationships in the graph model shown in
Figure 2. A straightforward interpretation of the graph model provides us with a formulation of an estimation problem with a conditional cost function given all priors and observations, which is:
where
is the pose to be estimated.
The two main sources of input are the camera projection process and the IMU sensing process, so we re-express Equation (
1) as follows:
where
is the projection-related error and
is the sensing-related error; the constraint Equation (
2b) models the relation between
CF and
IF and thus relates two error terms. Note that Equation (
2a) is a generic formulation of our pose estimation problem in the Earth frame, and different solutions may arise depending on the choices of
and
.
3.2. Method Overview
A direct optimization-based solution to Equation (
2a) is impractical because of its high dimensionality; therefore, we will break the problem down into smaller parts to solve it.
Referring to the original graph model presented in
Figure 2, we find that the first item in Equation (
2a), which corresponds to the red-outlined region in the upper right of the figure, describes
P model-based visual pose estimation problems, and similarly, the second item, corresponding to the blue-outlined region in the lower left of
Figure 2, describes the IMU orientation estimation problem seeking the rotation of
in
denoted by
, for which effective solutions (e.g., [
52]) are available under the assumption that we have already aligned
and
via
.
With these insights, given that
,
and
are available, using the graph model to determine
becomes a simple process of passing messages through a chain, as follows:
where
is used to fuse estimations from multiple viewpoints. Using
, we can calculate the downtilt and azimuth angles of the antenna.
In addition, we note that the priors
and
(i.e., the relative poses between the camera, accelerometer and magnetometer) are inherent to each specific mobile phone; thus, they need to be calculated only once and can then be stored for later use. To acquire the exact values of these rotations, we employ a dedicated offline camera-IMU calibration process, which will be described in
Section 4.
To summarize, our solution for antenna pose estimation in the Earth frame consists of the following four main steps:
For a given phone, we compute the relative poses between its camera and IMU sensors using an offline camera-IMU calibration procedure. Once calculated, the relative poses of the camera and IMU sensors will not change during the antenna pose estimation process.
Using the antenna model and images obtained from calibrated viewpoints, we estimate the relative pose between the antenna frame and the camera frame for each viewpoint.
We correct the IMU data using the relative rotation between the accelerometer and magnetometer from (1), and we calculate the rotation of the IMU in the Earth frame for each viewpoint using existing IMU orientation estimation techniques.
We concatenate the antenna pose in the camera frame and the IMU orientation in each viewpoint with the relative camera-IMU rotation from (1) to obtain the antenna rotation in the Earth frame; antenna poses in all viewpoints are averaged to calculate the resulting downtilt and azimuth angle.
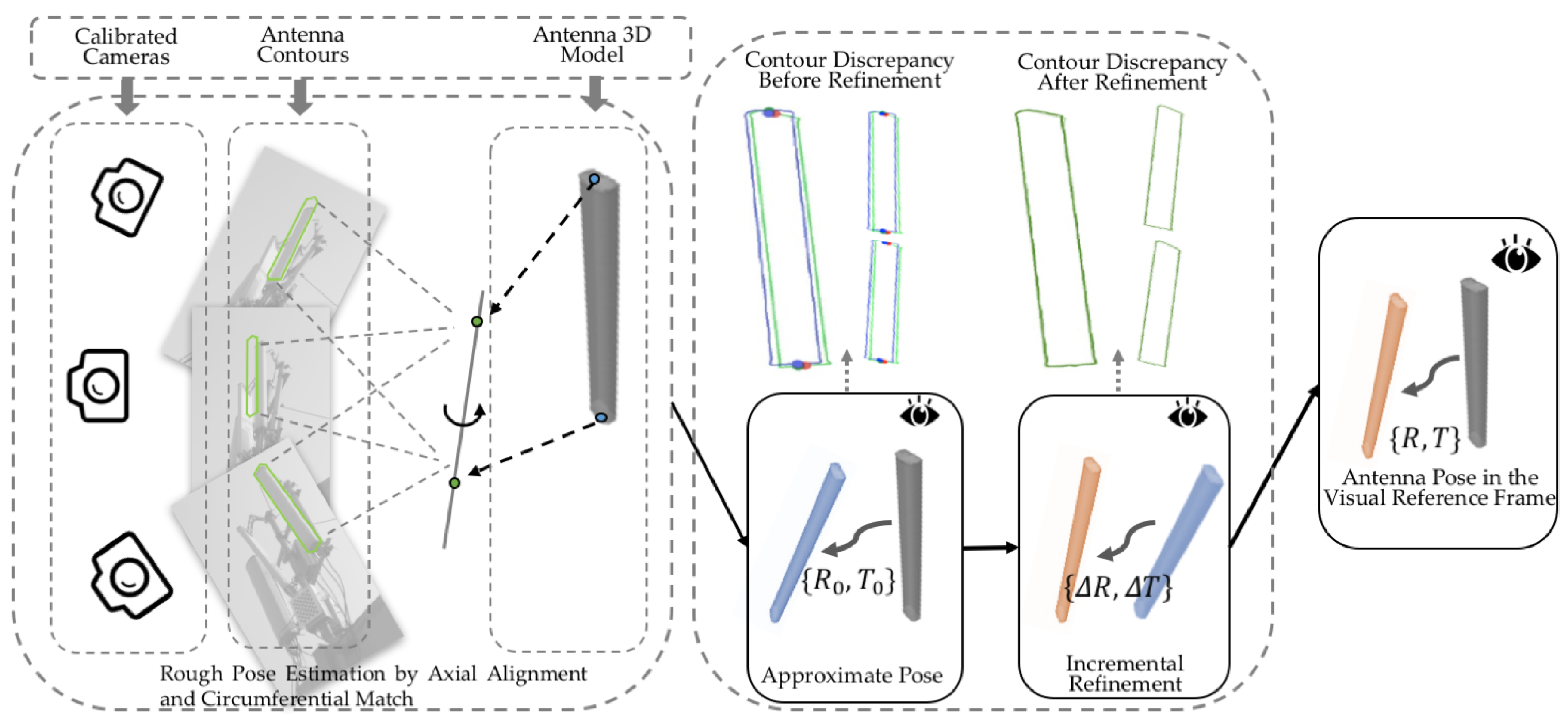
Figure 3 provides an overview of our method. The two key elements of our method are the determination of
and
in Step (1) and the estimation of
in Step (2). We describe the corresponding procedures in detail in
Section 4 and
Section 5.
4. Relative Poses between the Camera and IMU Sensors
In this section, our aim is to accurately determine the relative rotations between the camera, accelerometer and magnetometer to improve the accuracies of downtilt and azimuth estimation for a remote target.
We use a checkerboard to capture the data we need for calibration. The board is placed in several orientations, and for each placement, we measure the downtilt and azimuth angles and capture multi-view data in the same manner used for capturing data from an antenna. This checkerboard pose measurement step replaces the careful checkerboard setup required in [
37,
50]. Multiple groups of data are captured to provide sufficient constraints for the calibration.
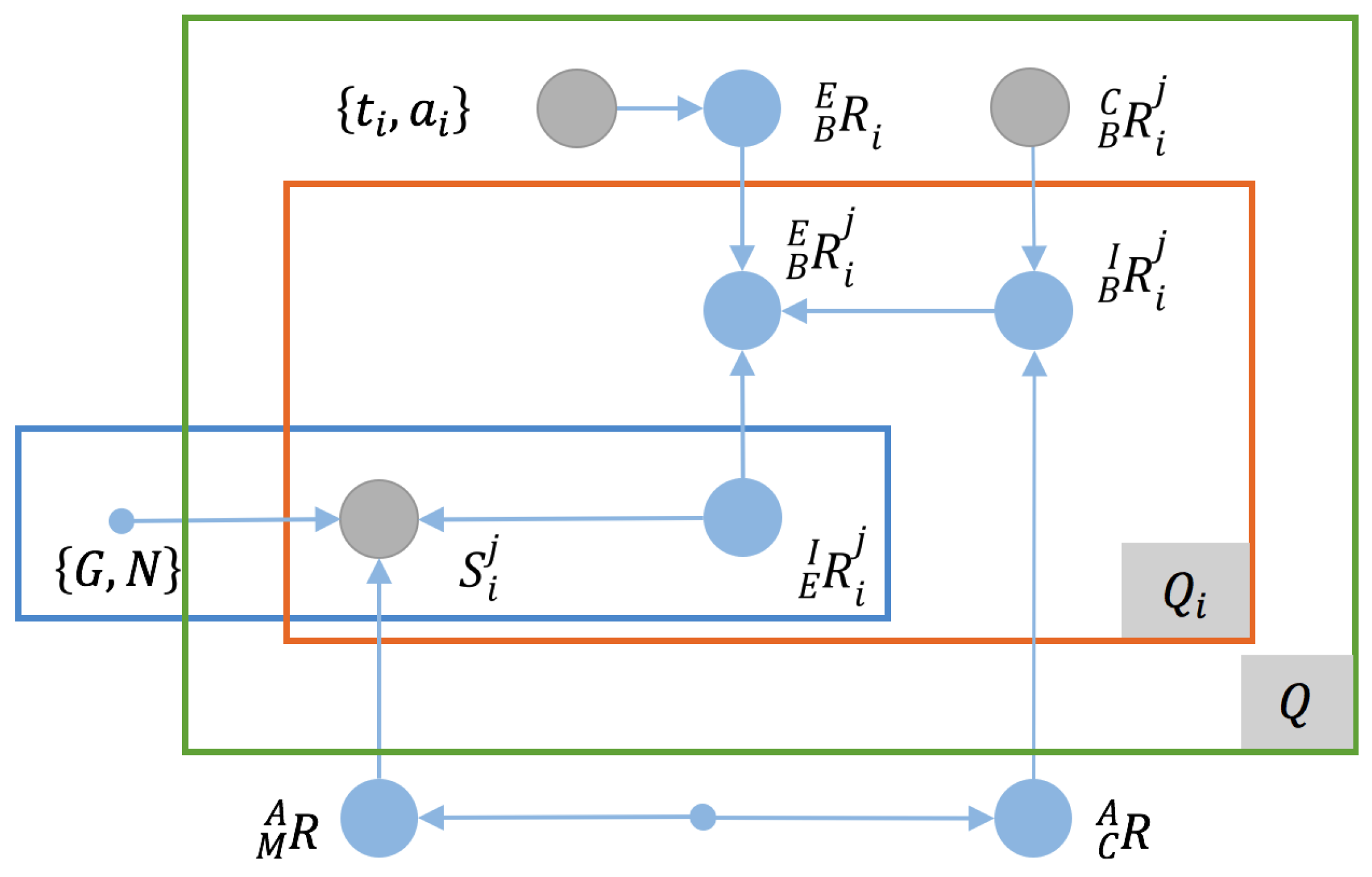
Suppose that we have a group of calibration data that consists of
Q checkerboard placements with measured downtilt and azimuth angles of
and that multi-view data have been captured from
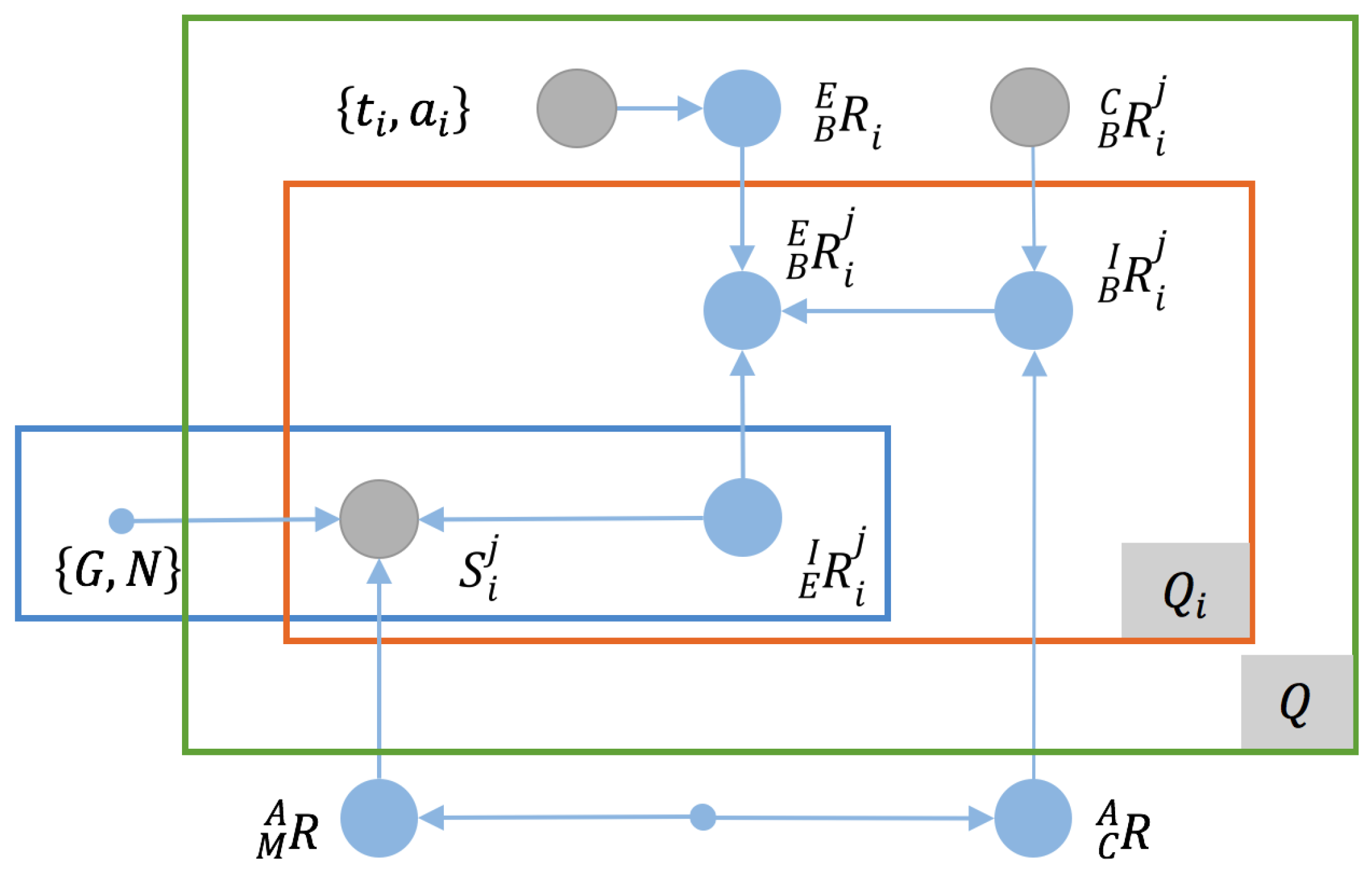
viewpoints for the
i-th checkerboard placement. Then, we can model the calibration using a graph model similar to that presented for the antenna pose estimation problem, as shown in
Figure 4.
Unlike in the case of the antenna pose estimation problem, because of the maturity of camera calibration techniques (e.g., [
53]), the relative pose between the camera and the checkerboard is considered to be known, and the downtilt and azimuth angles of the checkerboard are regarded as the ground truth. Thus, we can transform the graph model into the following optimization problem:
where
is a distance function or metric for rotations, which we will explain in detail later, and
is the IMU orientation in
EF as calculated from
, which is the
j-th frame of sensor data in the
i-th group of calibration data, with existing methods like [
52], after the accelerometer and magnetometer measurements have been aligned via
. The symbol of
B represents the coordinate frame of the checkerboard.
The functions of
and
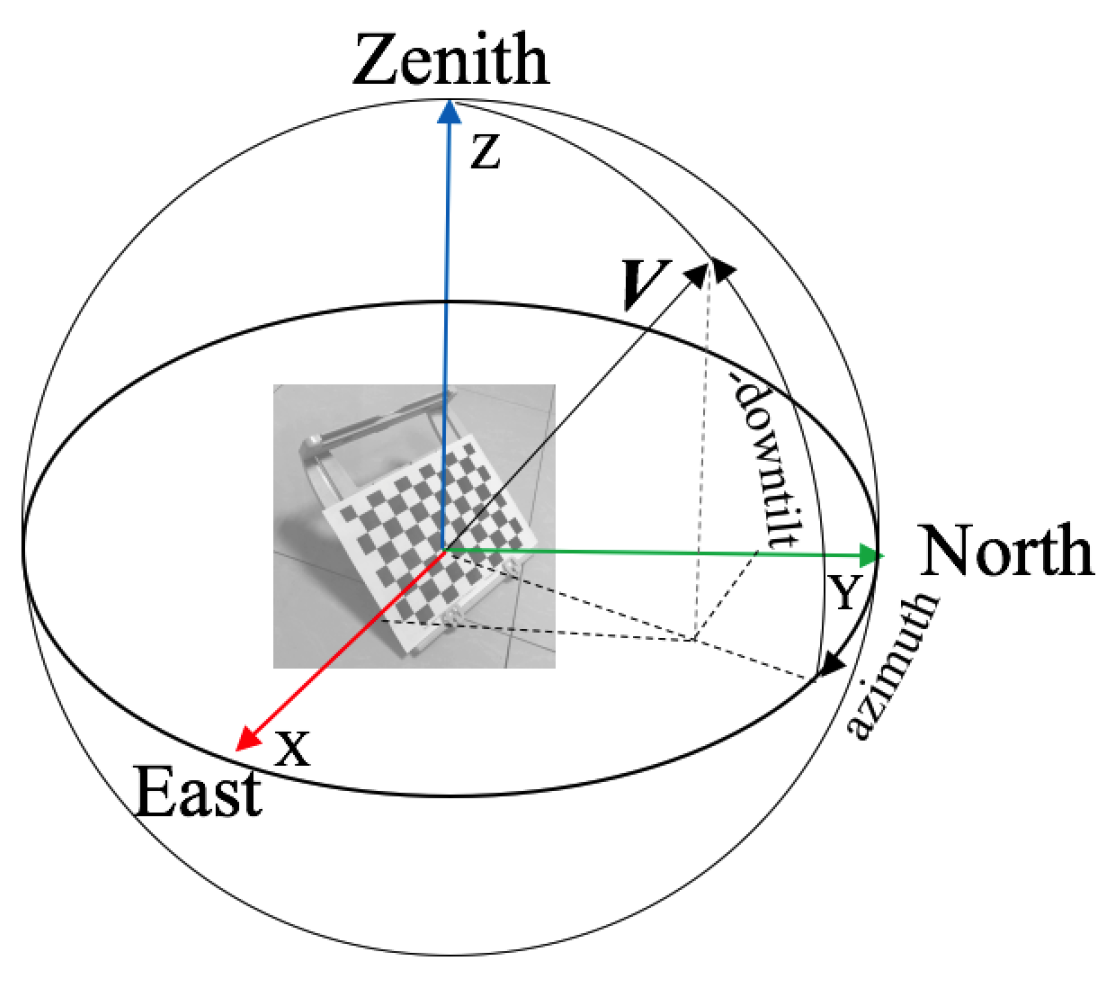
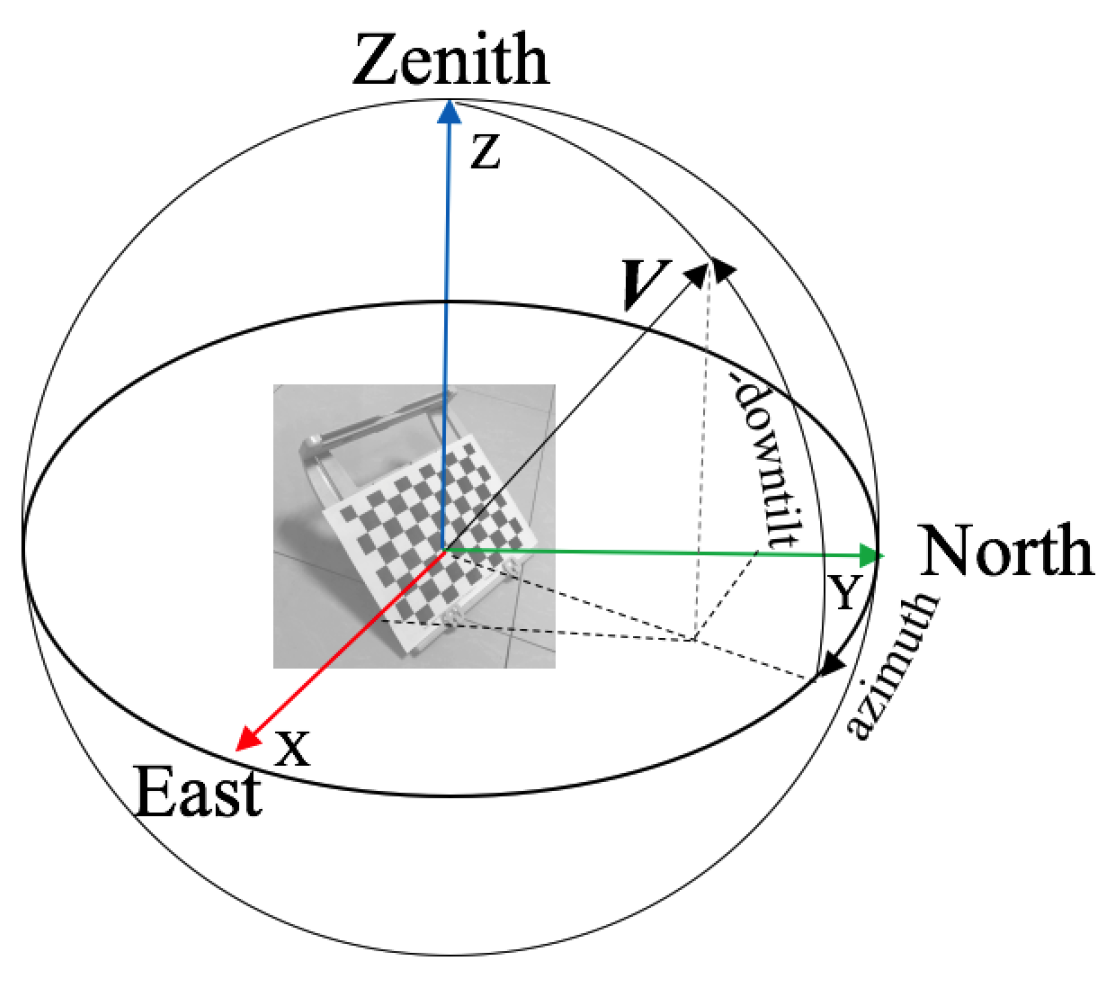
are defined for calculating the downtilt and azimuth angles of the checkerboard. In astronomy, for a vector
in
EF, its tilt and azimuth angles are defined as follows:
where
t is the tilt angle,
a is the azimuth angle and
is the
i-th component of
. For a checkerboard, we can use its edge directions, its surface normal direction or a combination thereof to describe its tilt and azimuth angles, and since most antennas are pointing downwards, we prefer to use the term downtilt instead of tilt, which are opposite from each other. To be specific, suppose that we choose a direction
v on the checkerboard to define the downtilt angle and that the rotation of the checkerboard relative to
EF is
; then, the downtilt angle of the checkerboard in
EF is defined by
. For convenience, we denote the above process by the function
, where we omit any reference to a predefined
. We can formally define the azimuth angle of the checkerboard in a similar manner and encode the process as
. An illustration is presented in
Figure 5.
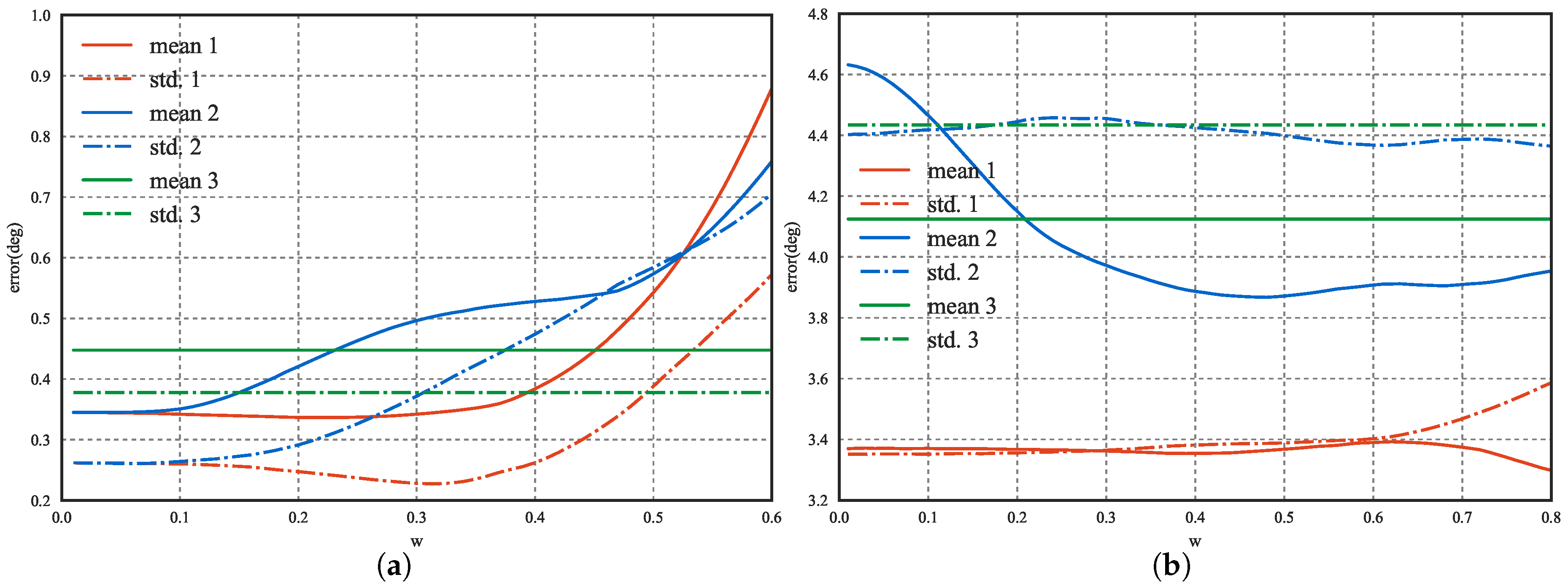
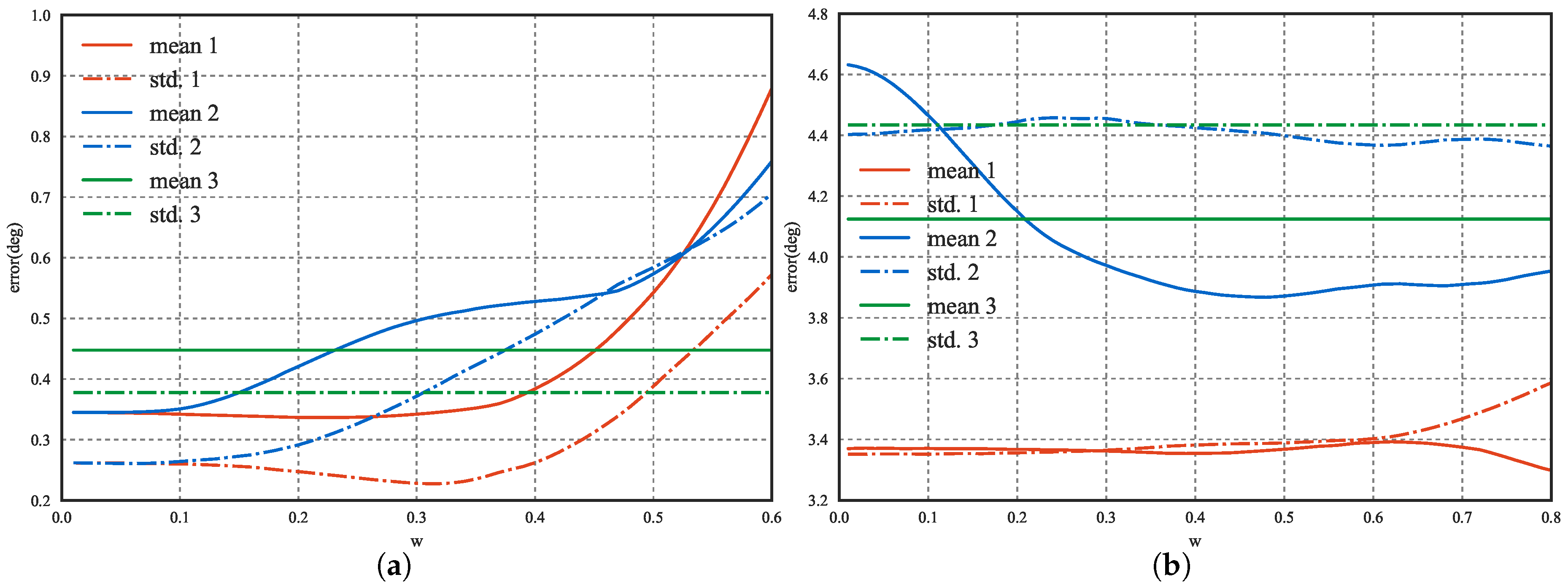
In Equation (3), the introduction of
, i.e., the relative rotation between the accelerometer and magnetometer, is a key element that differentiates our method from previous camera-IMU calibration methods. We have explained our motivations for this in
Section 1, and further evidence supporting our approach is provided by the contrasting behaviors of the downtilt and azimuth error curves with and without the additional DoFs, as shown in
Figure 6, which illustrates that it is difficult to find a balance such that both the downtilt and azimuth errors can be kept simultaneously low when
is ignored.
To complete our definition of Equation (
3), we design
to be a rotation metric defined in terms of the downtilt and azimuth angles, such that, for two orientations
and
, we have:
where
is a rotation distance function defined in terms of the downtilt and azimuth angles,
and
are two special functions for calculating the minimal differences in the downtilt and azimuth angles based on their periodicity and
w is a weighting parameter that will be explained later. A simple choice for
and
is the Euclidean distance after the transformation of the angles into the same phase.
Note that our metric is defined based on the downtilt and azimuth angles and thus has only two DoFs, meaning that it is an incomplete representation of a rotation. Although it would be easy to add another DoF to the definition, we choose not to do so to decrease the number of measurements needed during data capture.
We include the weight parameter
w in the final expansion in Equation (
4) to reduce the effect of the azimuth-related error on the overall cost. As is known from [
52], the downtilt reading of an IMU relies solely on the accelerometer output, whereas the heading (azimuth) measurement predominantly depends on the magnetometer output. However, the precision of the accelerometer in a mobile phone is typically much higher than that of the magnetometer, and the magnetic environment is highly unstable compared to the gravitational environment in practice. Hence, the scales of the errors on the two components of
are likely to be unbalanced, which may lead to non-optimal solutions for the overall calibration; by restricting
w to a value less than 0.5, we can re-balance the two types of errors.
Although we cannot determine
w analytically, we can show that the calibration accuracy is insensitive to
w when the value of
w is sufficiently low, as seen from the experimental results presented in
Figure 6. Empirically, we recommend keeping this value in the range of
.
Combining Equations (
3) and (
4), we obtain:
Equation (
5) is written in a standard least-mean-square form, and it can be effectively solved using the Levenberg–Marquardt algorithm [
54].
5. Antenna Poses Estimated from Captured Images
Considering that the scene containing the antenna is static from one viewpoint to another, if we insert a camera calibration object (e.g., a checkerboard) into the scene and employ a suitable extrinsic camera calibration technique (e.g., [
53]) or apply a structure-from-motion (SfM) technique (e.g., [
55]) to the background, we can obtain the relative poses of the camera corresponding to all viewpoints relative to a visual reference frame, meaning that the task can be formulated as a visual pose estimation problem using data from
P viewpoints. Let the viewing reference frame (
VF) be denoted by
V; let the camera frames (
CFs) be denoted by
; and let the relative poses be denoted by
. Then, we need to find only the relative pose between
O and
V instead of the original
unknowns. This process is expressed as follows:
where
describes the error on the visual pose estimation based on images acquired from
P viewpoints.
To complete our definition of Equation (
6), we define
as a contour-based distance function between the projections of the 3D antenna model and the antenna foregrounds in the real images:
where
is the projection contour of the antenna in pose
from the
i-th viewpoint of extrinsic camera parameters of
; and
is a contour-based distance function.
Our approach does not rely on any assumption regarding the form of
. Without loss of generality, we define
based on a point-to-contour distance:
where
and
are the two contours to be matched and
is the operator for calculating the shortest Euclidean distance between a point and all points on a contour:
Another way to interpret
is to treat it as an embedding function of the level set underlying a contour; for details, we refer the reader to [
56]. An efficient algorithm to compute
is given in [
57].
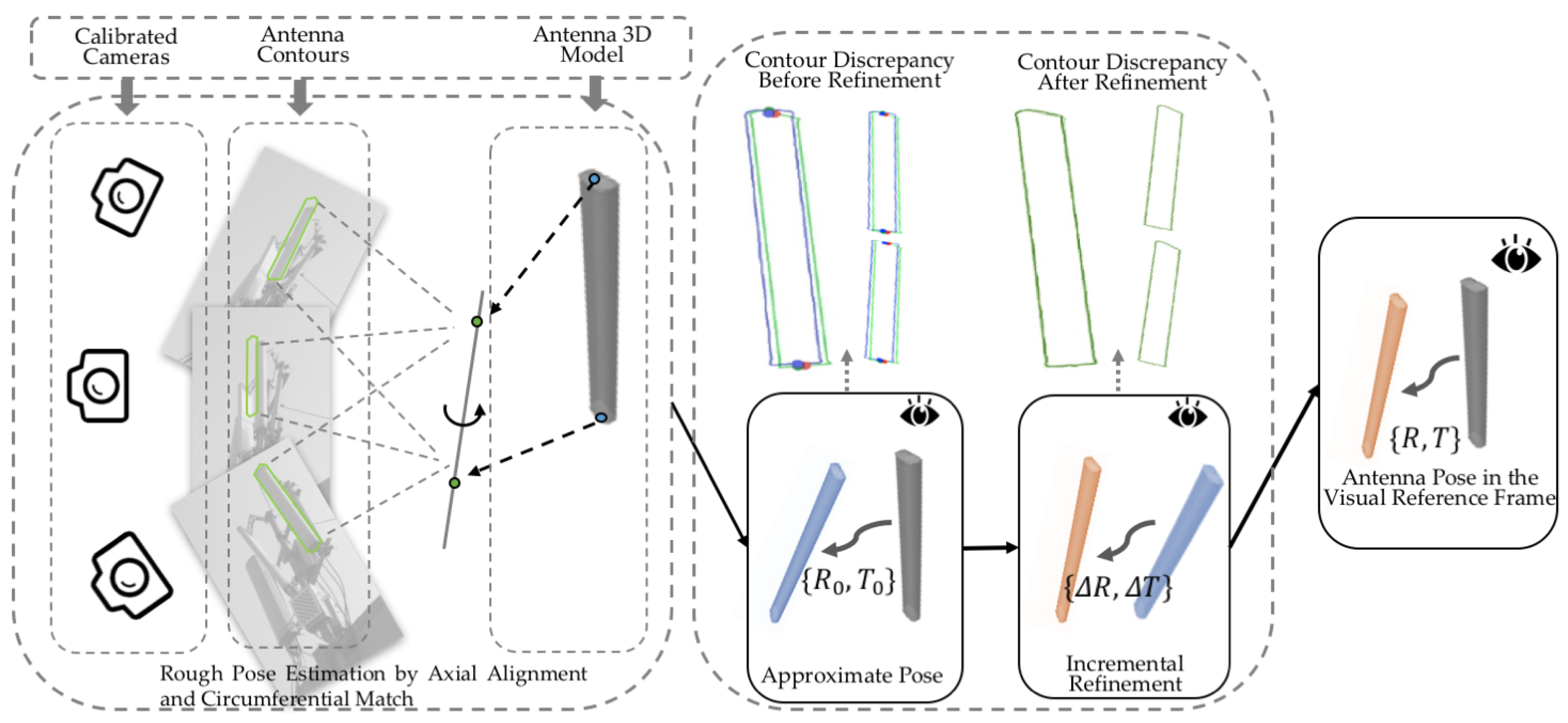
To solve Equation (
6), we adopt a coarse-to-fine strategy. First, we exploit the fact that most antennas are approximately cuboid in shape to recover an approximate pose, by aligning the 3D principal axis of the model with the 2D principal axes in the multi-view images and finding a proper rotation around the principal 3D axis. Then, based on this coarsely estimated pose, we construct bounding constraints to be applied to the pose search space, thereby allowing us to seek the optimal pose by using global optimization techniques to minimize Equation (
6). An overview of our approach is provided in
Figure 7.
5.1. Approximate Pose Estimation for Initialization
5.1.1. Axial Alignment
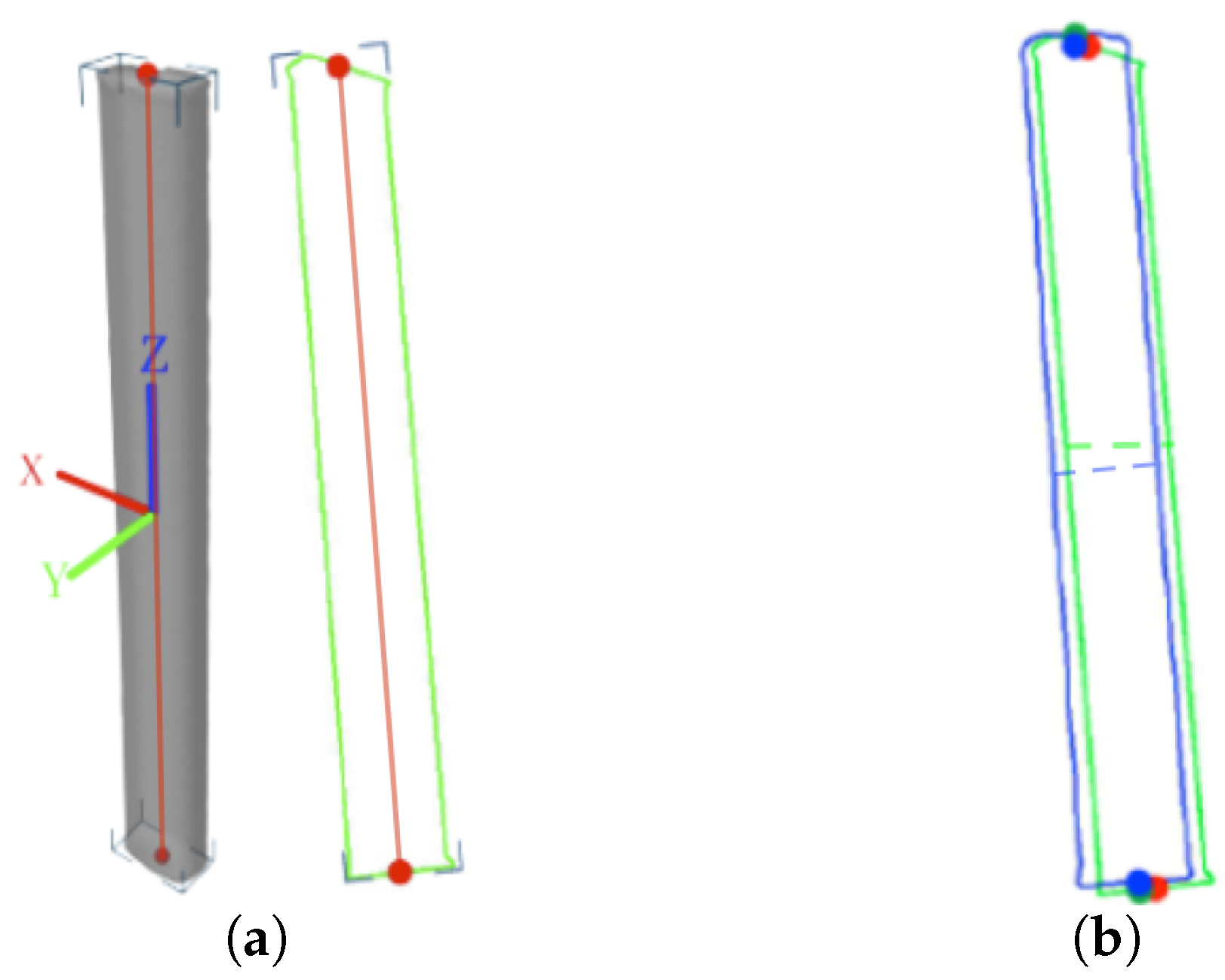
The strong axiality of the antenna shape originates from the fact that most directional antennas are approximately cuboid in shape. We use the concept of principal axes to describe the axiality of both the antenna model and the antenna projections in images. We define the 3D principal axis of the model as the 3D line segment that crosses the centroid of the model, is oriented in the direction along which the model extends the farthest and is bounded by the mesh (as illustrated in
Figure 8a); similarly, the 2D principal axis of a projection is the 2D line segment that crosses the centroid of the 2D silhouette, is oriented in the direction along which the silhouette extends the farthest and is bounded by the contour (as illustrated in
Figure 8a).
The first step of our coarse pose estimation procedure is to find a pose for which the 3D and 2D axes are aligned. First, we detect the 2D/3D principal axes from the images and the 3D model. There are many ways to achieve this, for example, by applying principal component analysis (PCA), or independent component analysis (ICA) to the contour points and the 3D model vertices, or by finding the (rotated) bounding box of the contour/model.
Once the 2D axes have been found for all viewpoints, we recover the 3D principal axis in
VF from the end points of the 2D axes using triangulation methods (e.g., [
58]). Let the recovered 3D axis be denoted by
, and let the 3D principal axis of the model be denoted by
; then, we have:
where
is the pose to be estimated. Equation (
8) is also known as the generalized Procrustes problem and can be efficiently solved analytically [
59].
5.1.2. Circumferential Match
However, the solution to Equation (
8) is not unique: from a geometric point of view,
describes only the yaw and pitch of the antenna. Let the two angles be
and
; we can write
as
. The left roll angle, which describes the rotation around
, is still undetermined.
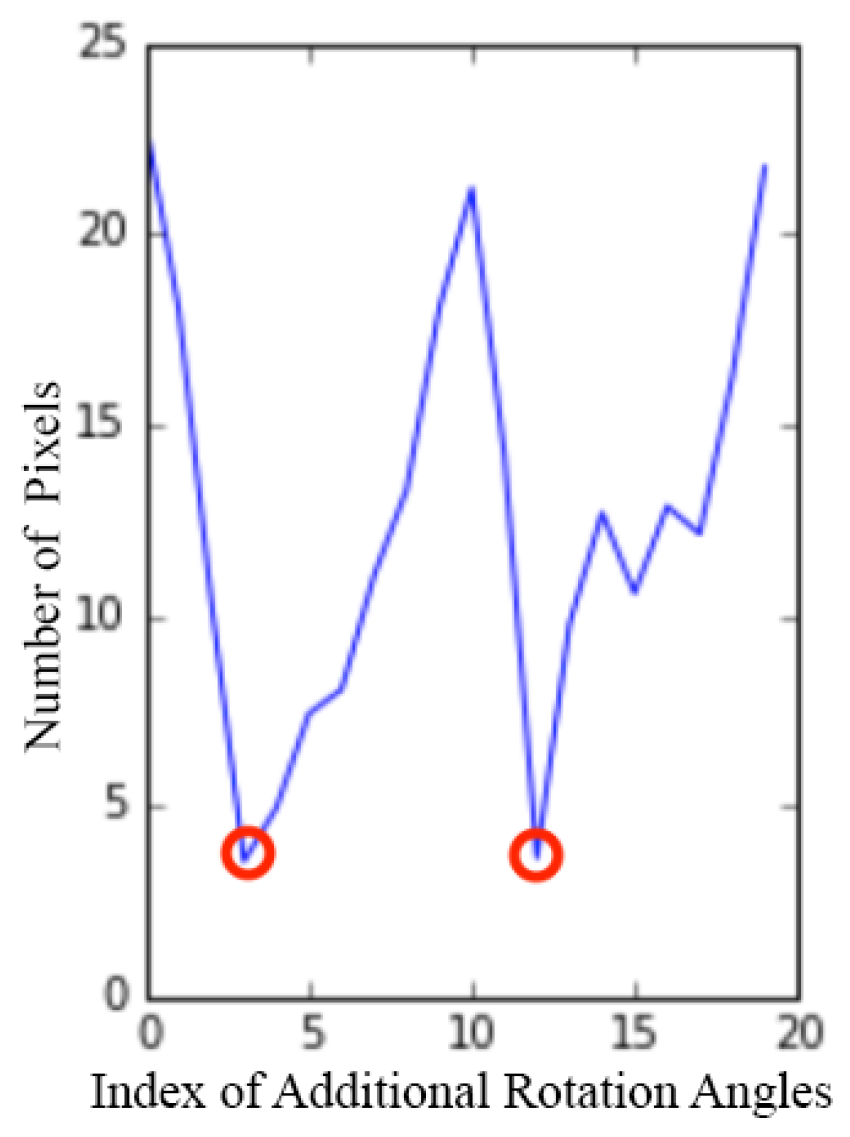
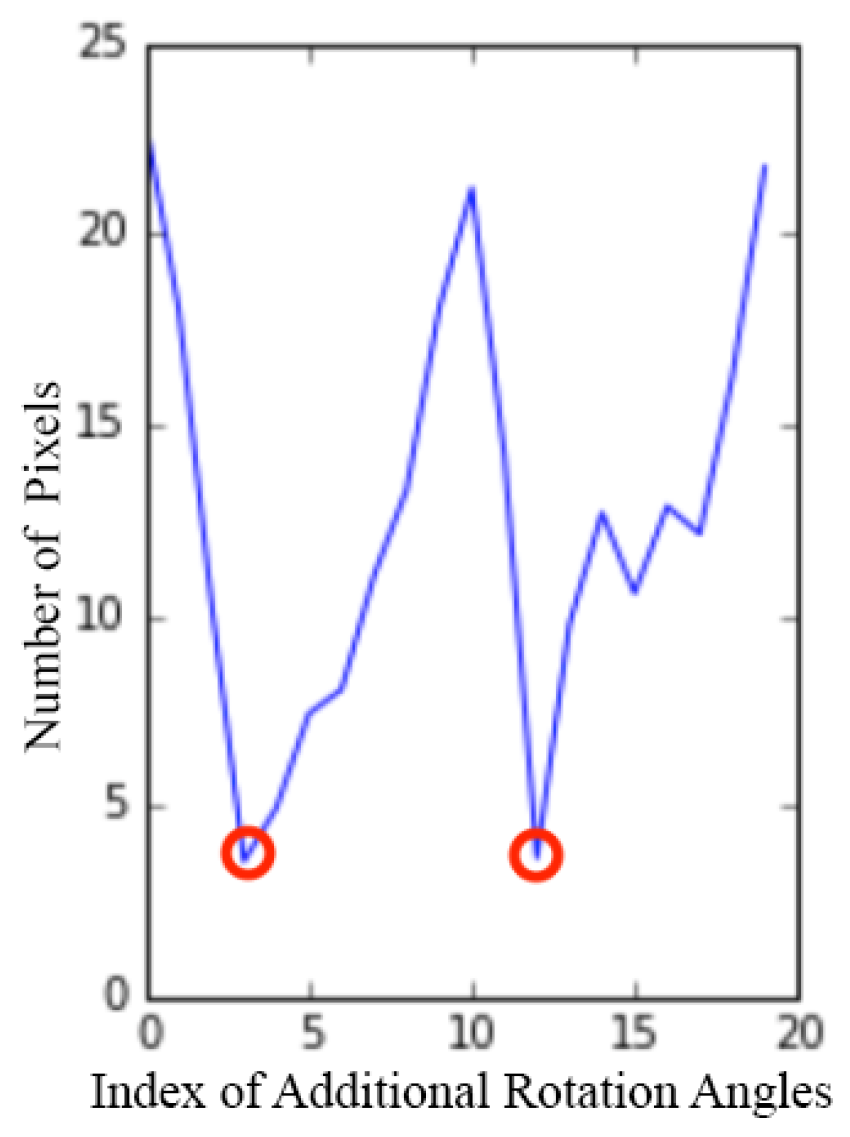
To eliminate the remaining uncertainty, we enumerate the discrete rotations of the model around
based on
to find a rotation that minimizes the difference between the widths of the antenna silhouettes at their centers in the real images and in the projections (as indicated by the dashed lines in
Figure 8b).
Figure 9 shows an example of how the width difference changes with the rotation; two minima are observed because of the symmetry of the antenna model, and we select the correct one based on prior knowledge of which side of the antenna is facing the camera.
Let the best rotation angle determined through enumeration be
, and let the additional rotation it represents be denoted by
; then, by combining
and
, we obtain the following approximate rotation:
Figure 8b shows an example of how the contours from a real image and from the antenna projection based on the recovered pose are aligned for a single viewpoint.
5.2. Pose Refinement
5.2.1. Bounds on Pose Parameters
The pose obtained above is inaccurate as a result of three factors: (1) displacements between the detected 2D/3D principal axes and their true positions; (2) potential errors in the triangulation of the 3D principal axis from the images; and (3) imprecision in the determination of the roll angle. Consequently, we wish to further refine this pose.
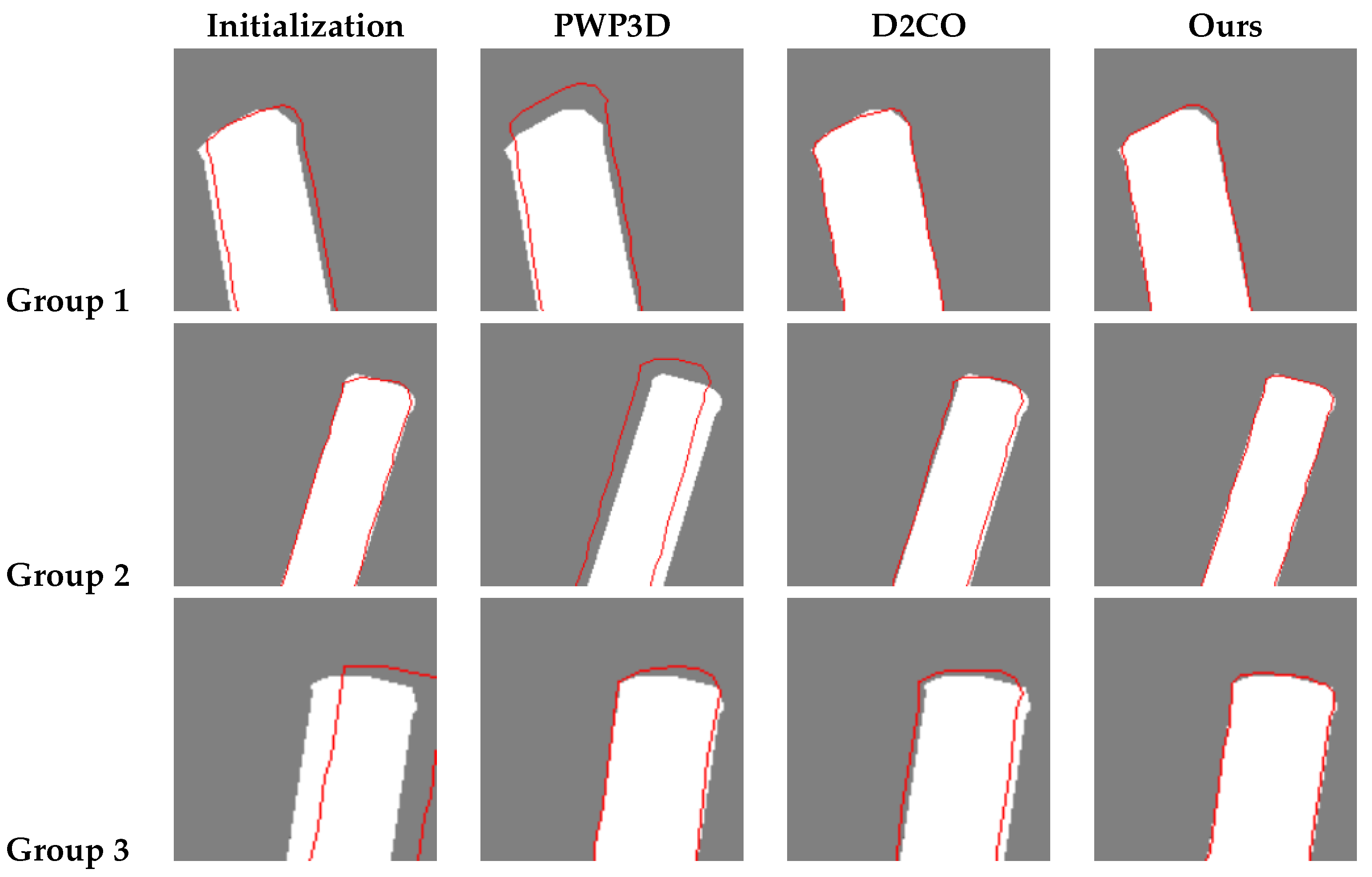
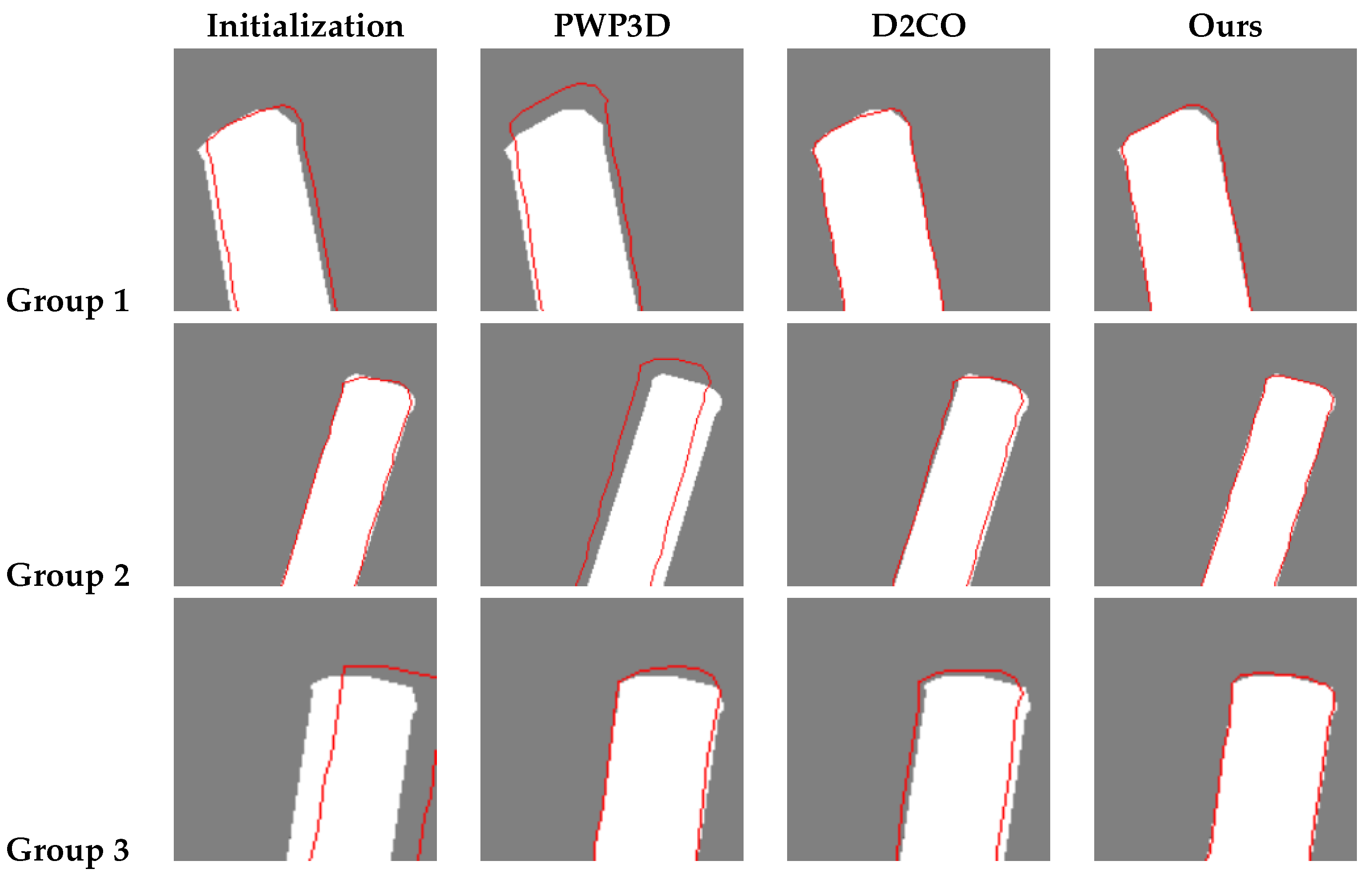
A simple approach is to treat the approximate pose as an initialization and then iterate until convergence is achieved, as done in PWP3D [
35] and D2CO [
32]. Although our approximated poses function well as initializations in most cases, they still cannot guarantee the avoidance of local minima. For higher accuracy, we attempt to find bounds on the pose search space that will allow us to use global optimization techniques to solve Equation (
6).
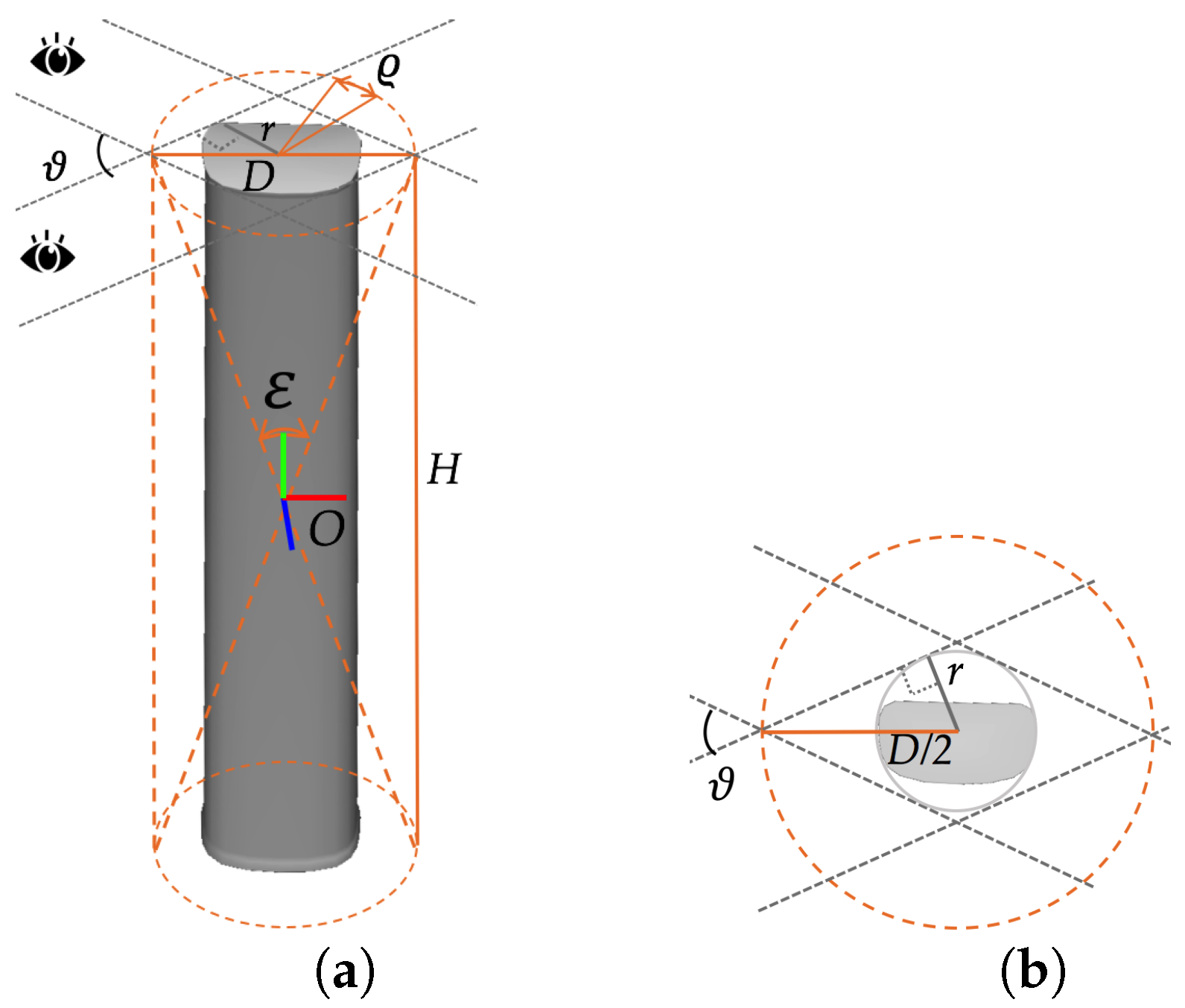
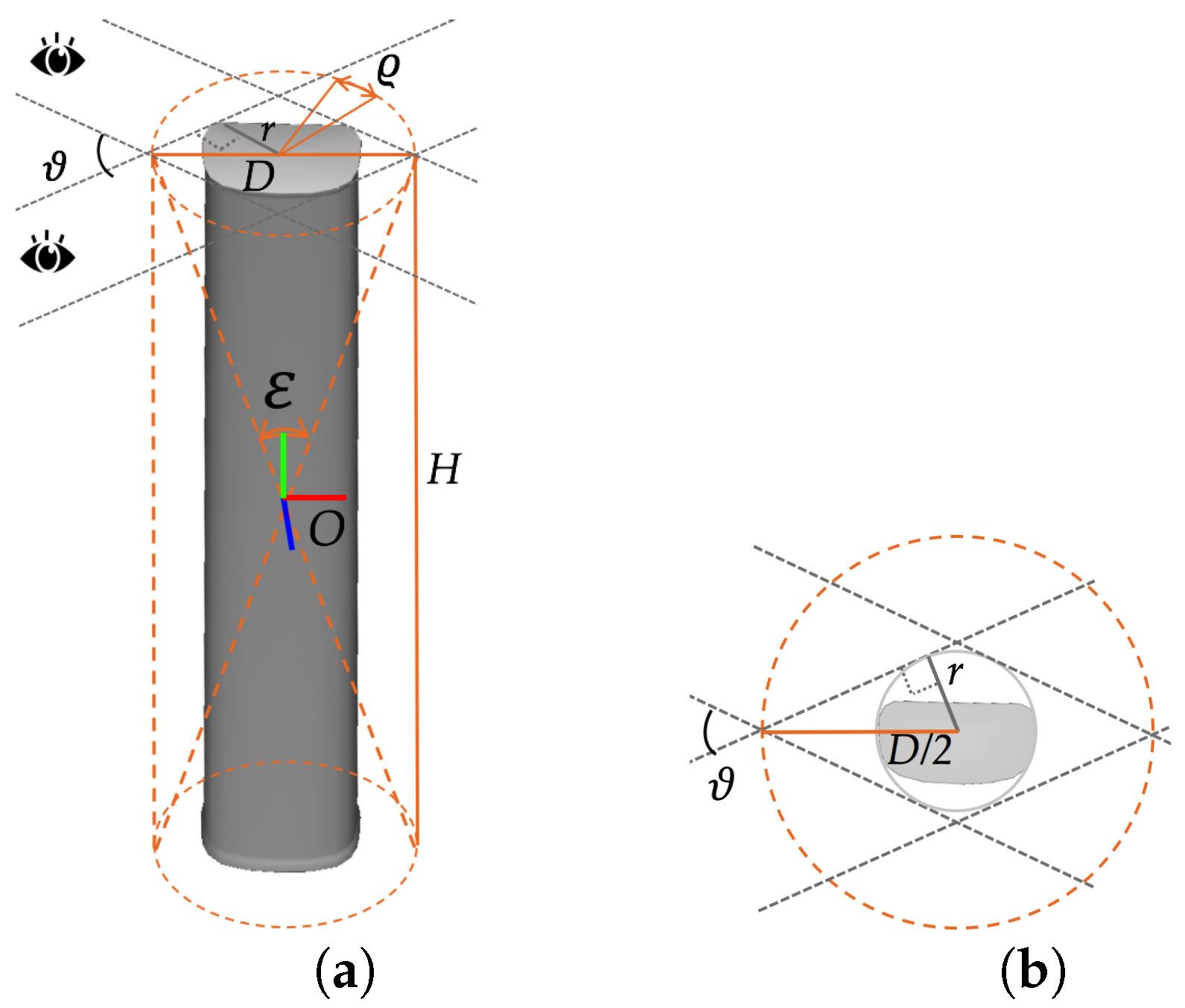
We first concentrate on the rotational component of the pose. The first two sources of imprecision are predominantly related to the yaw and pitch of the antenna. We observe that the projection of the 3D principal axis based on the approximate pose never falls out of the area enclosed by the two long side edges of the antenna silhouette for each viewpoint, which means that the recovered 3D principal axis always lies within the double cone enclosing the visual hull of the antenna suggested by contours from multi-view images, as indicated in
Figure 10a. Let the viewing angle between the two most distant viewpoints be denoted by
, and let the radius of the bounding cylinder of the antenna be denoted by
r; then, the diameter
D of the cone is
(see
Figure 10b), and the opening angle
of the cone is
, where
H is the height of the antenna (see
Figure 10a). In this way, we can obtain bounding constraints on the refinements to the yaw and pitch. In practice, we have found that the approximate rotation is usually much closer to the true value than these bounds would suggest, so we scale the bounds by an empirical factor
to further shrink the search space.
Regarding the last source of inaccuracy, i.e., that affecting the roll angle, we already have a natural bound, namely the granularity used when enumerating the roll angle in
Section 5.1.2, which we let be denoted by
.
To summarize, the bounded search space for the refined rotation is:
where
,
and
describe the difference between the approximate rotation and the real value.
Regarding the translation of the model, it can be similarly observed that the projection of the center of the model always falls within the antenna foreground in the image and is usually not far from its true position. This means that in
OF, the true translation is confined to the cylinder formed by the top and bottom of the double cone found above (see
Figure 10a), yielding bounds of
on translations in
OF based on
. Moreover, for reasons similar to those motivating the introduction of the scale factor
, we also introduce an empirical factor
for the translation along the principal axis. Finally, in
VF, we have the following bounded translation space:
where the vector
describes the difference between the approximate translation and the real value.
5.2.2. Refinement via Constraint-Based Optimization
To summarize, the optimization defined in Equation (
7) is now rewritten as:
The constraints expressed in Equation (
9) are simple box-shaped boundary constraints, which enable us to search for the refined pose in a reduced space by seeking global convergence using algorithms such as the dividing rectangles (DIRECT) algorithm [
60]. Typically, another round of local optimization (we use constrained optimization by linear approximations (COBYLA) [
61]) is then performed to also ensure local optimality.
5.2.3. Validation of the Effectiveness of the Bounds Applied for Pose Refinement
In
Table 1, we present the statistics of the estimation error with respect to the ground truth based on the refinement results obtained using the Broyden–Fletcher–Goldfarb–Shanno (BFGS) algorithm [
62] and COBYLA as solvers for Equation (
9) on an antenna dataset named AntennaL, which consists of 65 groups of data (described in detail in
Section 6.1). Both solvers seek a local optimum, but the latter is a solver that can take advantage of bounding constraints, whereas the former is not. A comparison reveals that COBYLA yields far better estimates of both the downtilt error and the azimuth error, although there are cases in which the azimuth error is greater than the maximum tolerance allowed in the industry (15 degrees).
7. Discussion and Conclusions
The focus of our study is the development of a novel non-contact solution for estimating antenna tilt and azimuth angles using a mobile phone as the measuring device. The two key points of our pipeline are the newly proposed camera-IMU calibration method for mobile phones and the coarse-to-fine visual pose estimation method.
The major difference between our camera-IMU calibration method and the state-of-the-art [
37,
50,
51] is the inclusion of additional DoFs between the accelerometer frame and the magnetometer frame, which allows for decoupling of the accelerometer-related error and the magnetometer-related error and therefore leads to good performance on both tilt and azimuth estimation tasks simultaneously.
The crucial distinction between our visual pose estimation method and existing ones is the coarse-to-fine strategy we adopt. With this strategy, we avoid any manual pose initialization and more importantly are able to refine the approximate pose as a constrained optimization problem for higher accuracy compared with the state-of-the-art [
32,
35]. Besides, our method is based on multi-view contours instead of stable visual feature, which makes it very suitable for pose estimation of the textureless and simple-shaped antennas.
The major limitation of our work is the excessive computational resource consumption of the global optimization step of the pose refinement procedure. In the future, we will attempt to alleviate this problem by adding simple user interactions and/or developing more heuristic strategies for search space reduction.
We are also aware of the influence of hand shakes on accelerometer outputs if no tripod is used. According to our experience, a simple mean filter applied on the accelerometer data can effectively reduce the impact provided the shakes are slight; nevertheless, we intend to exploit methods used in image stabilization to fundamentally address the issue. Another related problem is the simple strategy for fusion of pose measurements from multiple viewpoints: though the present method of averaging works well in most cases, it may fail to generate the optimal results when outliers exist, as indicated by the relatively large error in the last row of
Table 4. To overcome this problem, we have two working directions in the future: one is to adopt more powerful fusion methods, and the other is to integrate information from more sensors for an effective quality metric for pose measurements.
At last, we note that, aside from mobile telecommunications, our method can also be useful in areas such as the space field [
64], indoor navigation [
65], unmanned aerial vehicles [
66], and so on.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}