Sensor Fusion of a Mobile Device to Control and Acquire Videos or Images of Coffee Branches and for Georeferencing Trees

 , , and
, , and
Abstract
:1. Introduction
1.1. Related Work
1.2. The Problem and the Contributions of This Investigation
2. Image Acquisition of Coffee Branches in Field Conditions with a Mobile Device
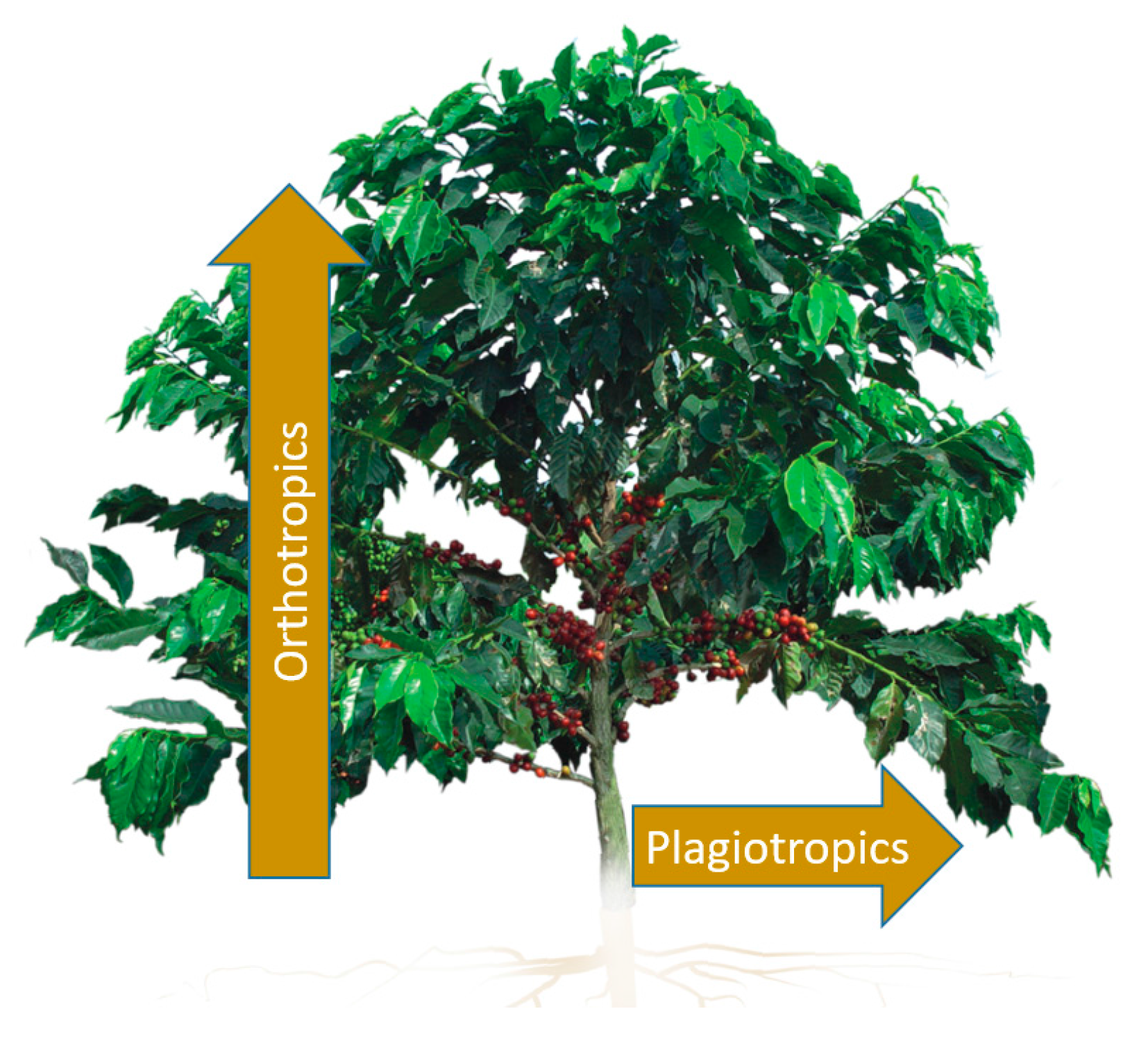
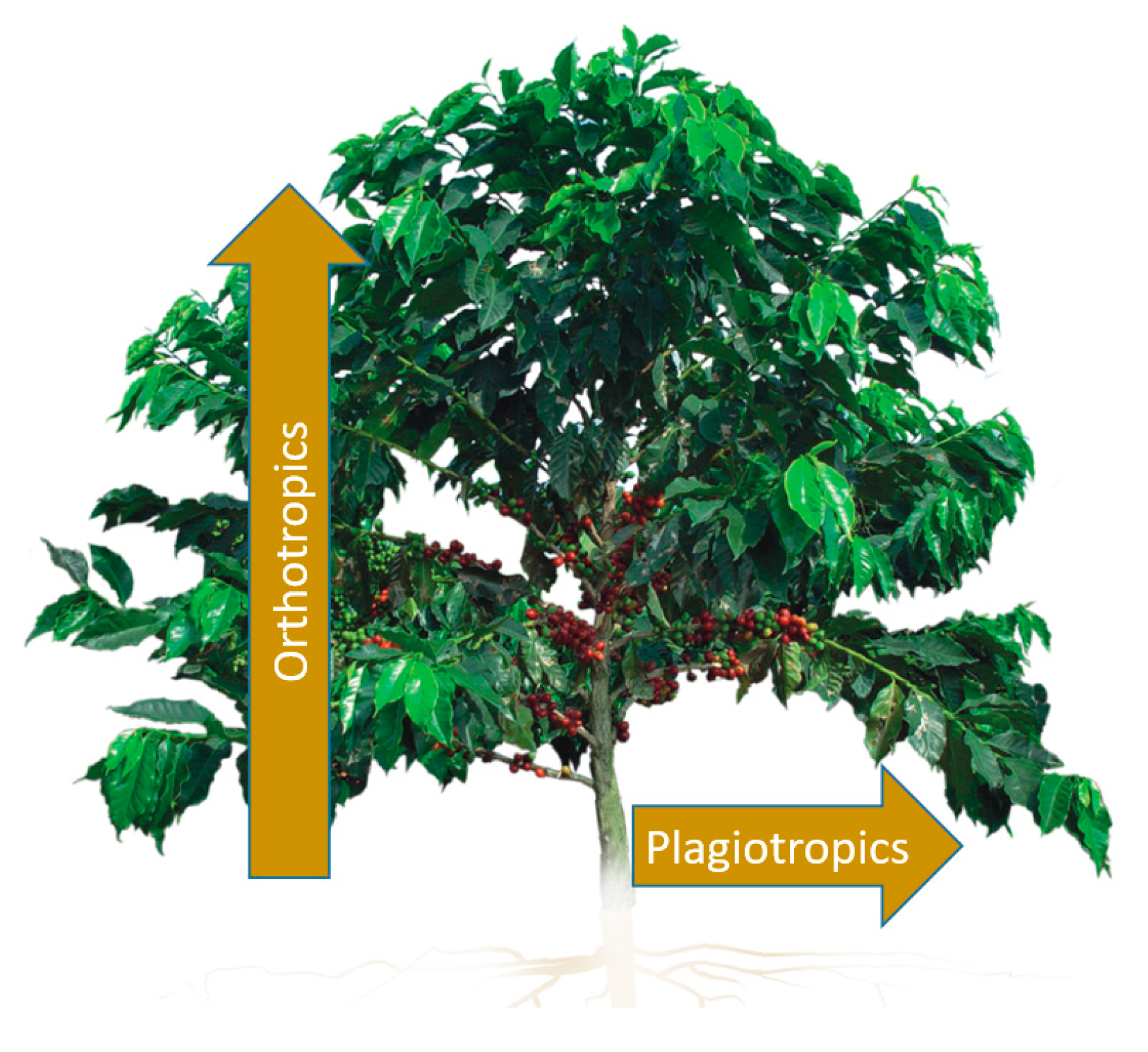
2.1. Conditions for Image Acquisition in the Field
2.2. Design Specifications for Image Acquisition
2.2.1. Camera Configuration for Images/Videos
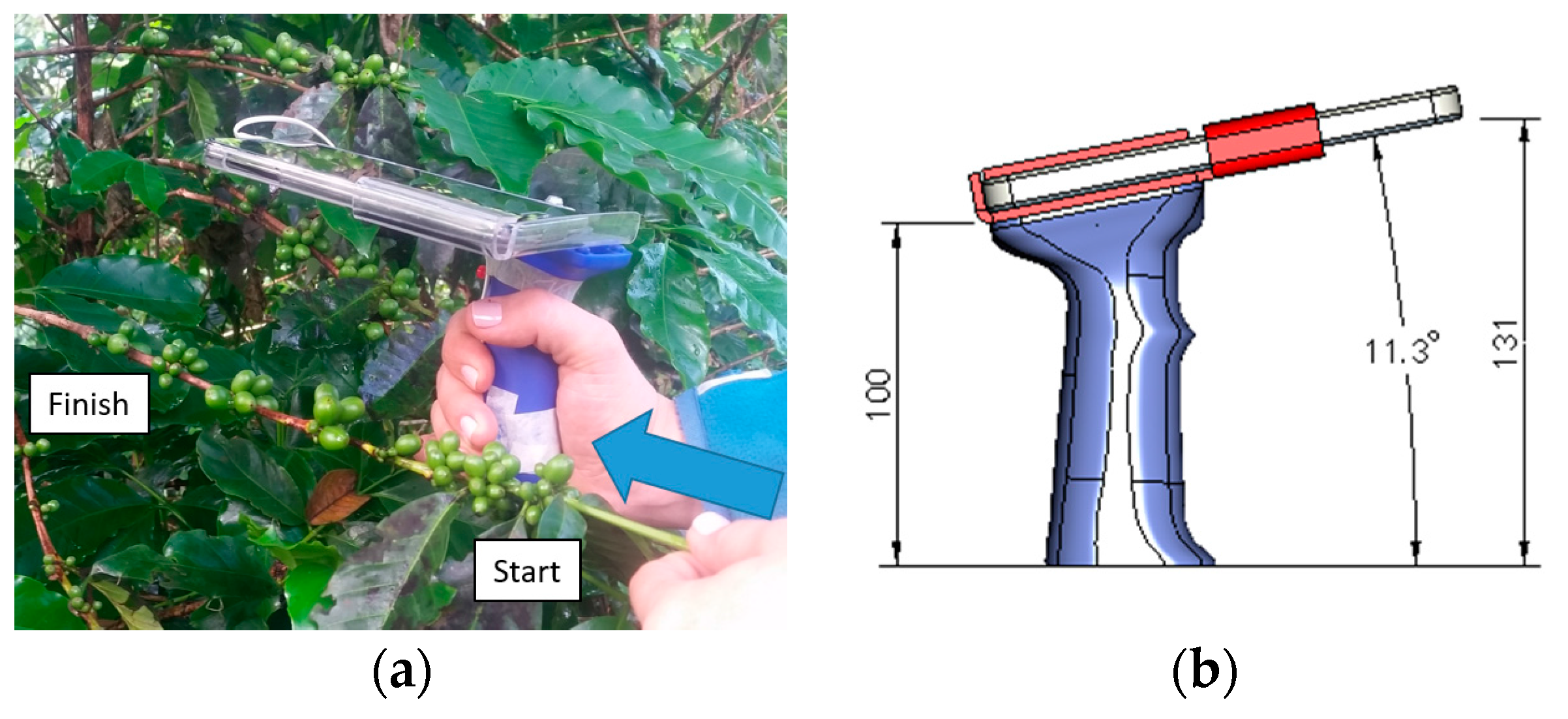
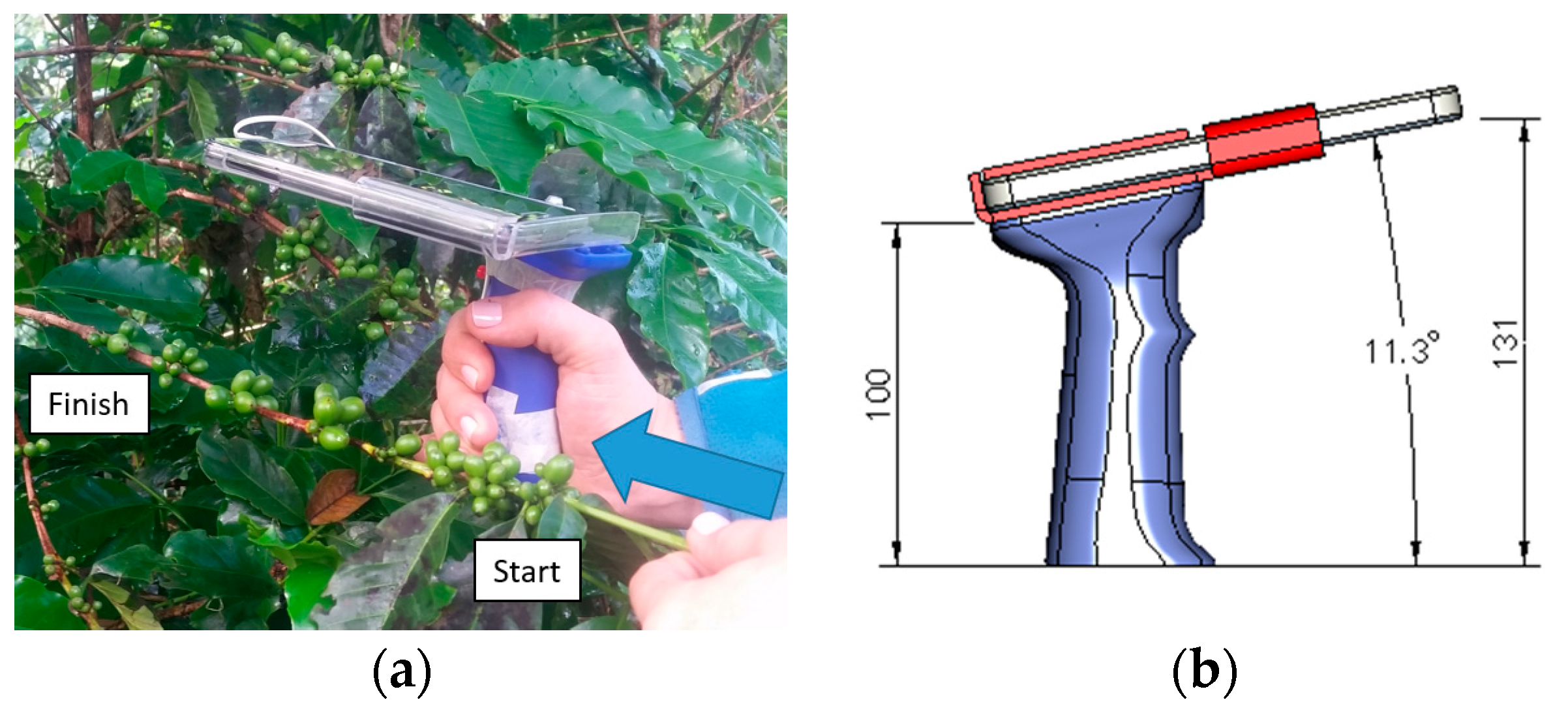
2.2.2. A Mobile Device Holder: Avoiding Image Blurriness
2.2.3. Focus Control and Image Acquisition Using a Push-Button
2.2.4. Measurement of Movement in the Acquisition of Videos/Images and Calculation of Blurriness Caused by Movement
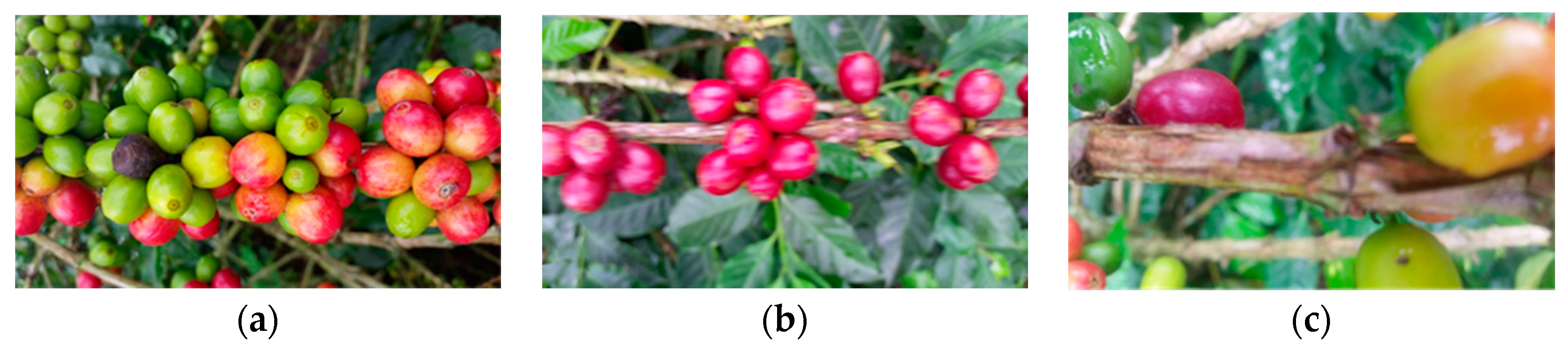
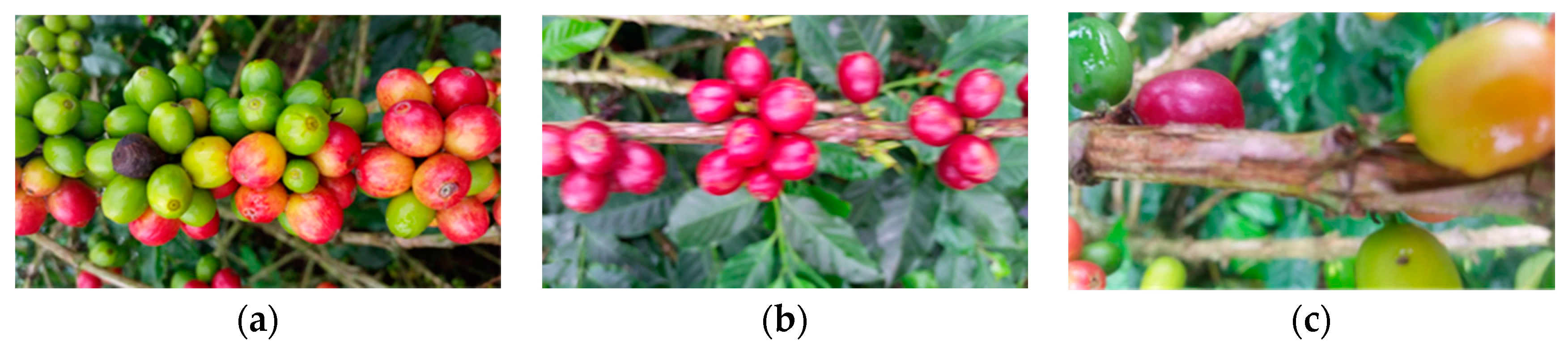
2.2.5. Types of Acquired Images
3. Inertial Navigation System (INS)
3.1. Capture and Analysis of Movement
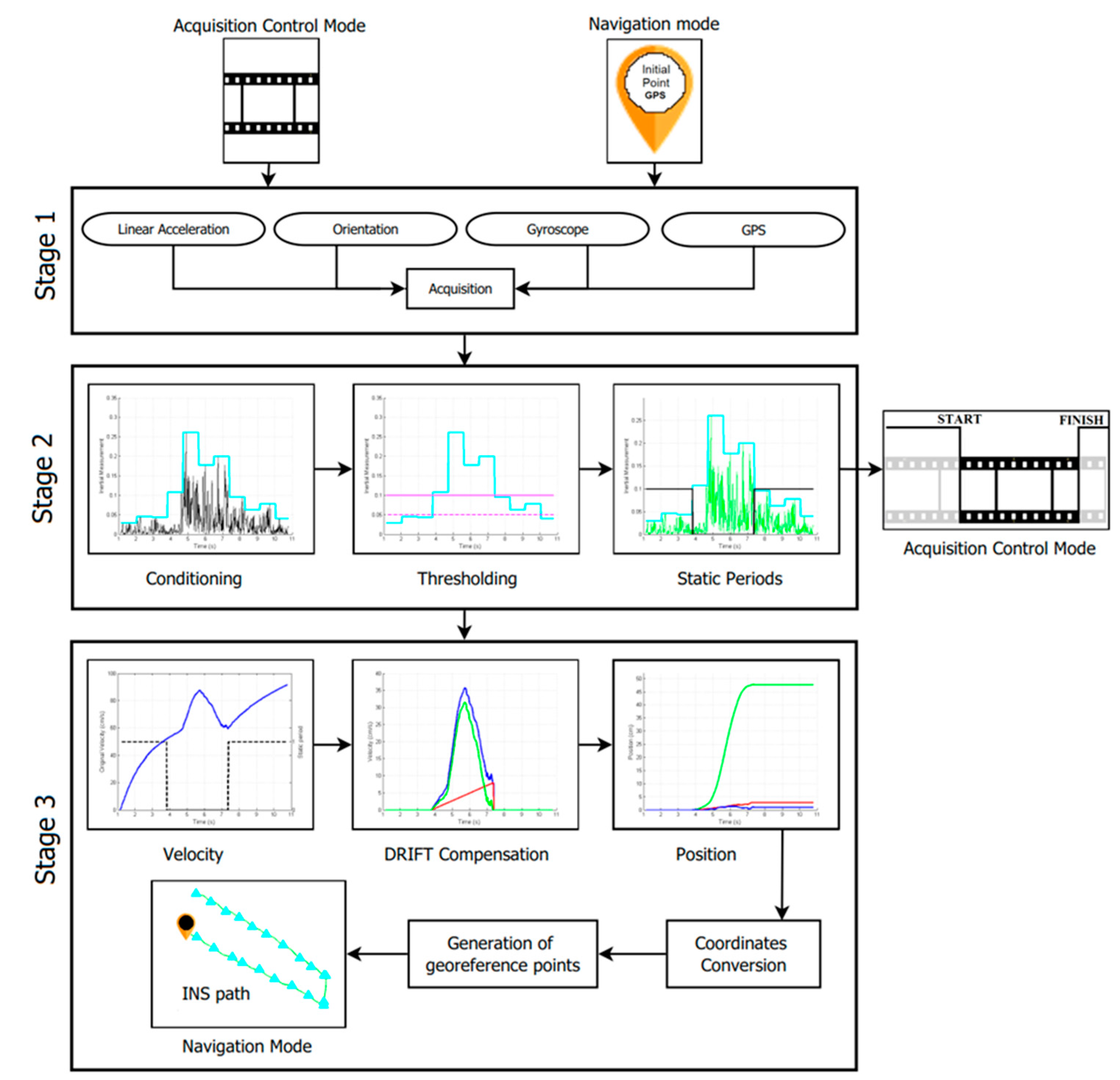
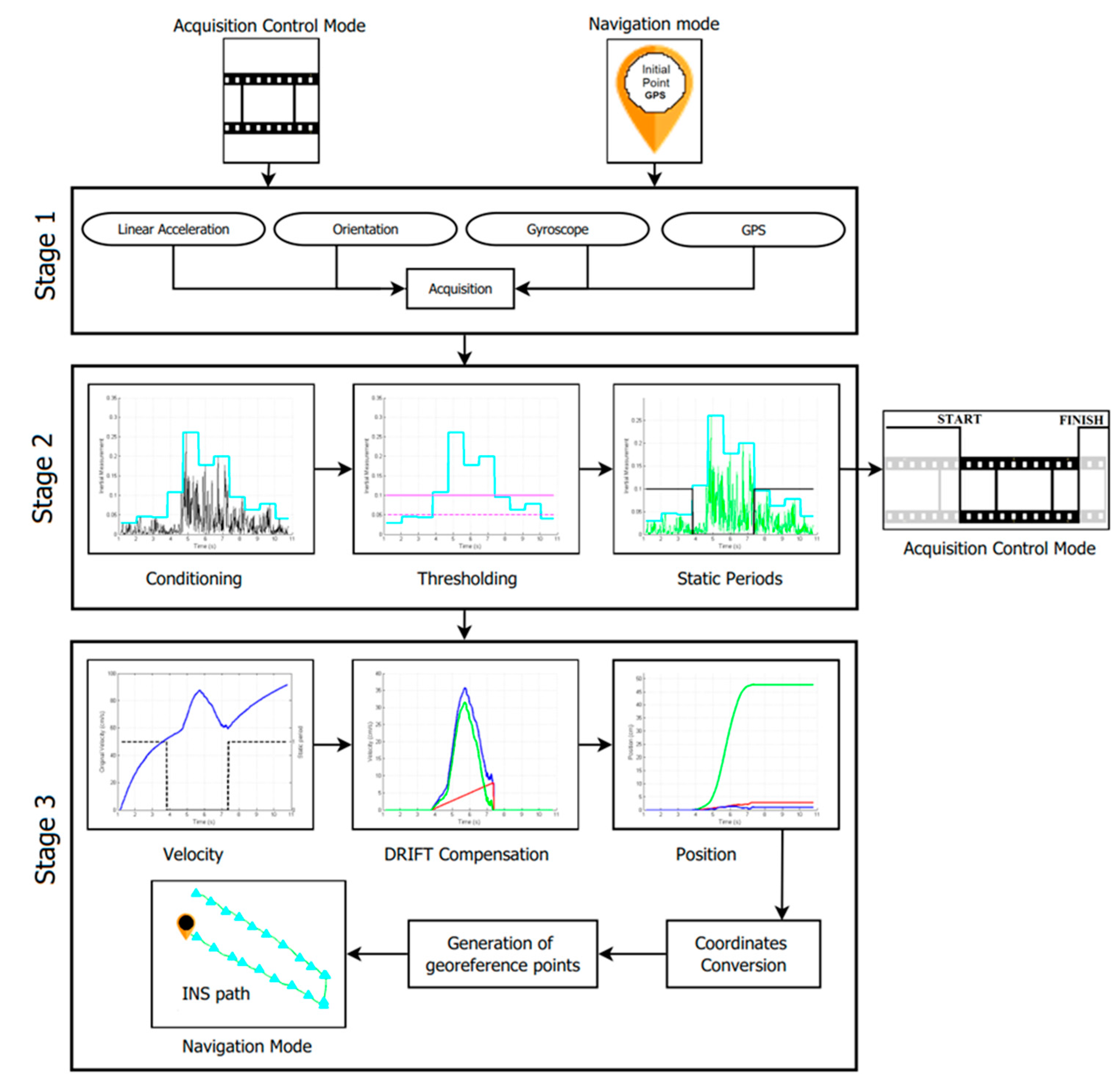
3.2. Proposed Inertial Navigation System (INS)
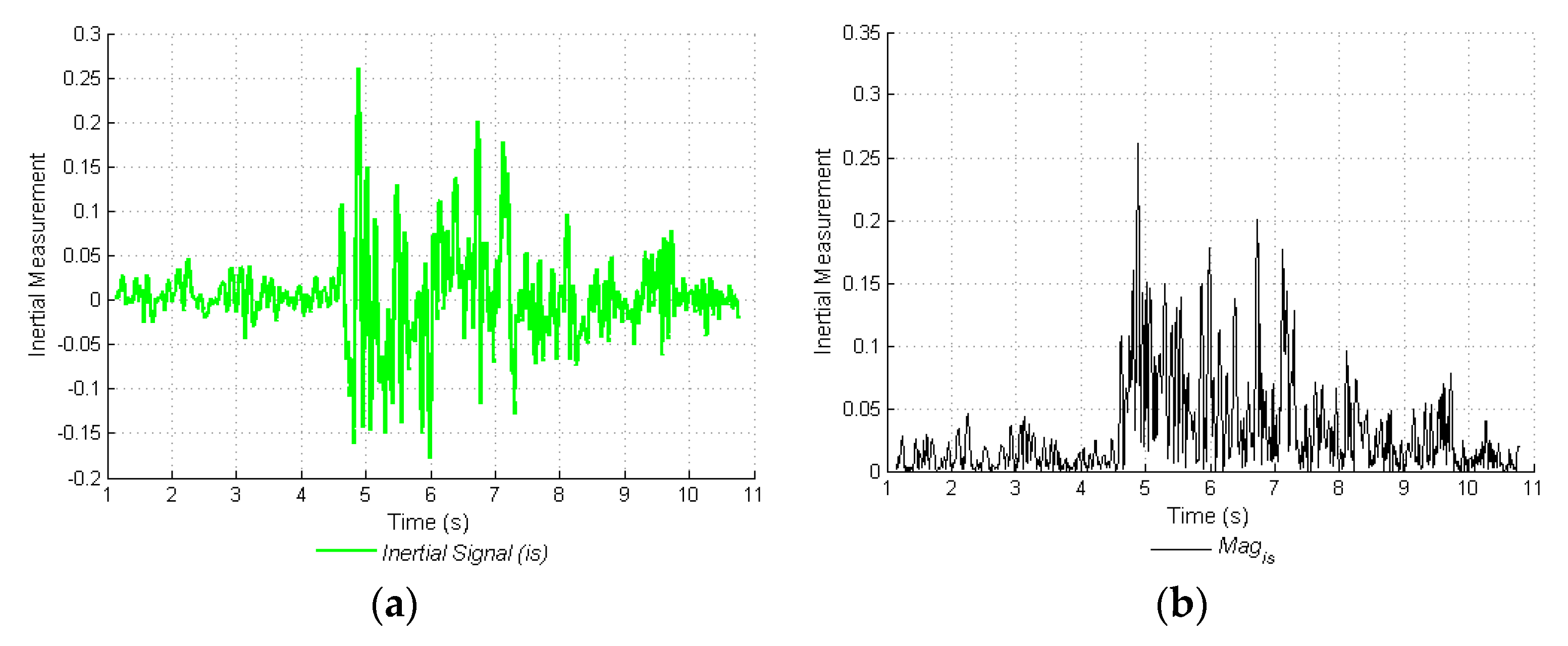
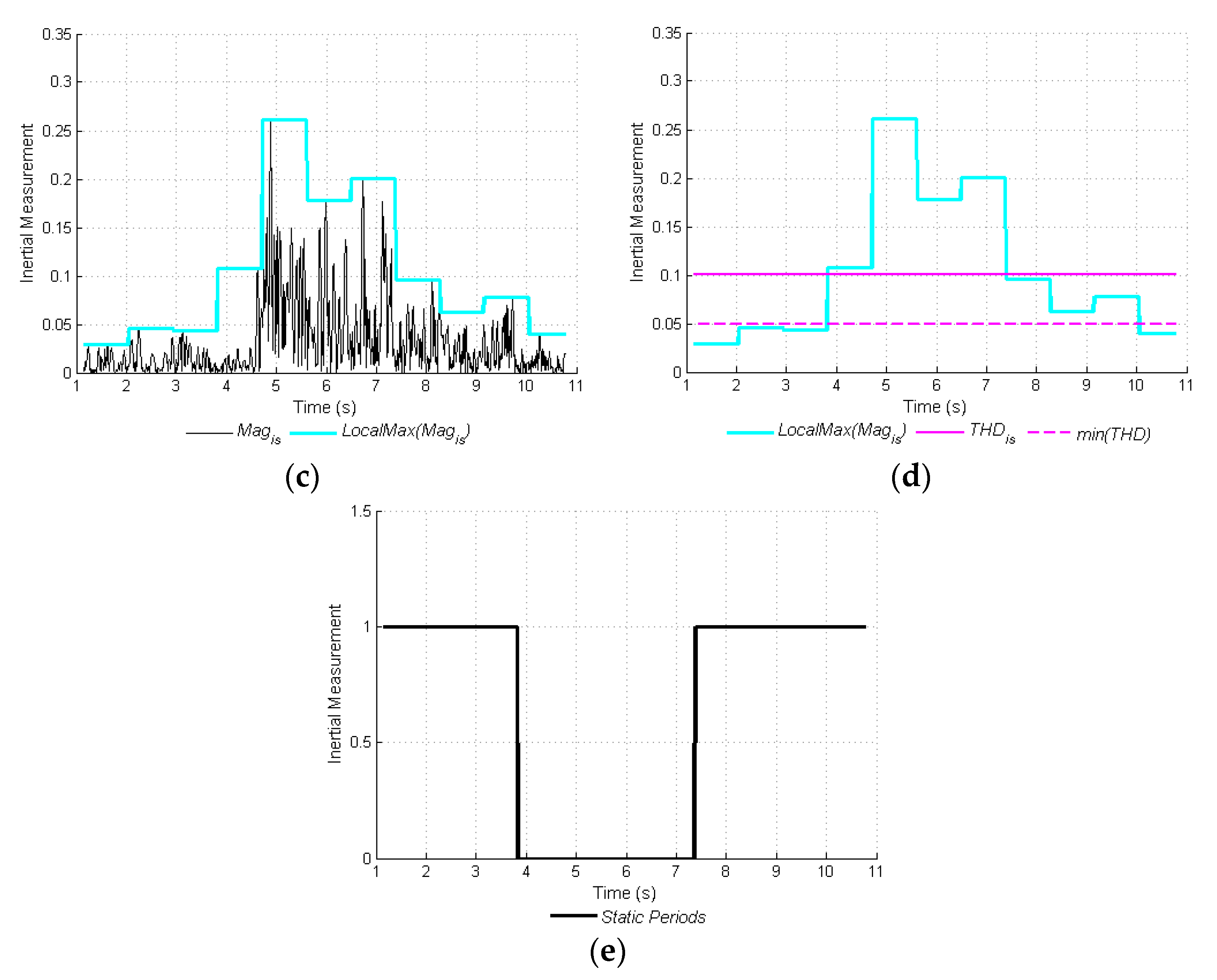
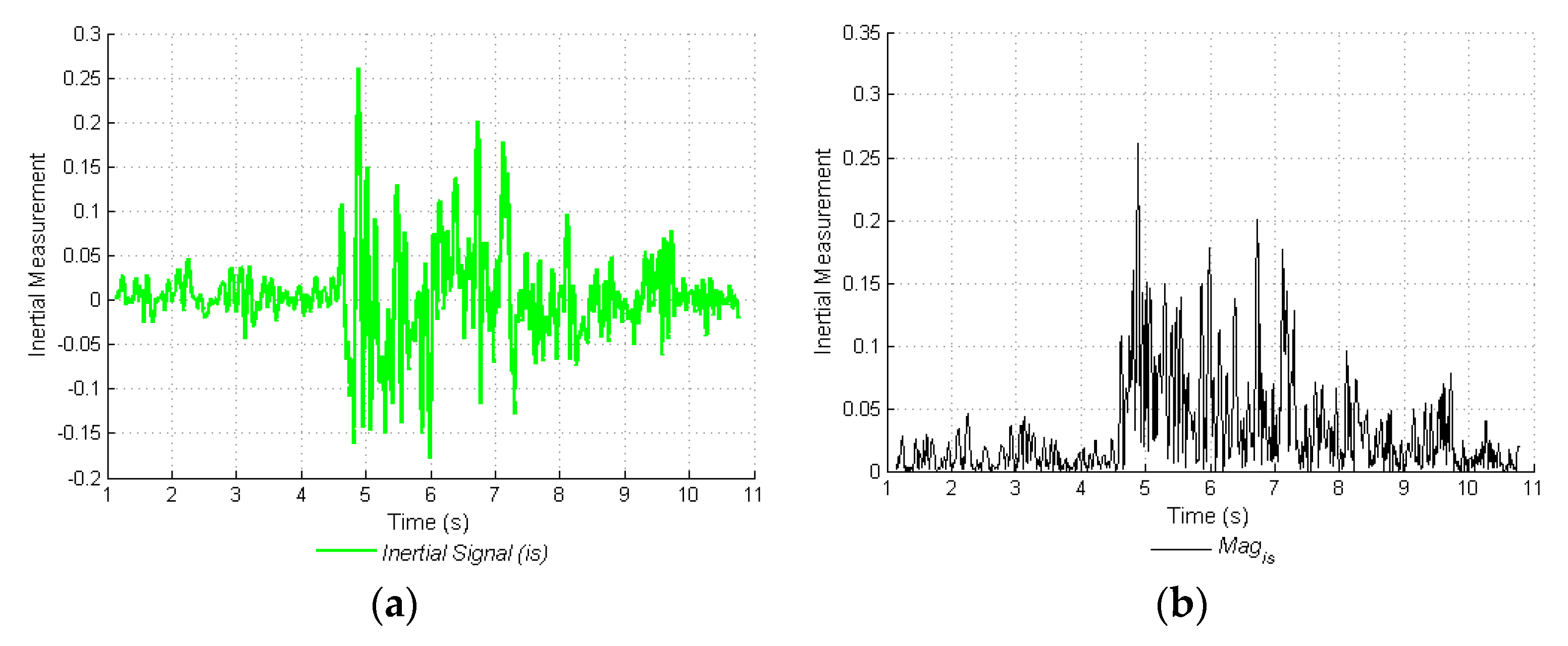
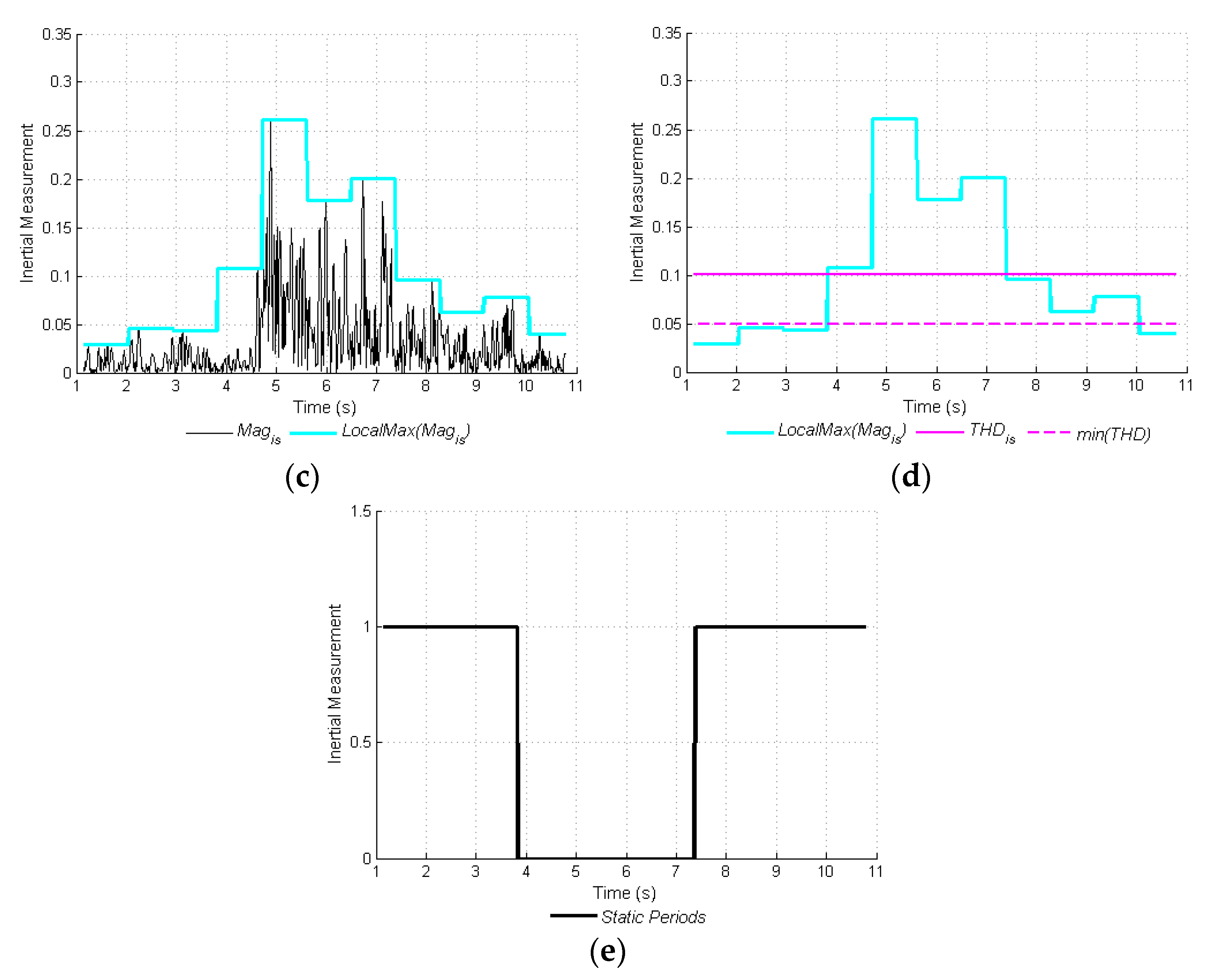
3.2.1. Acquisition and Conditioning of Signals
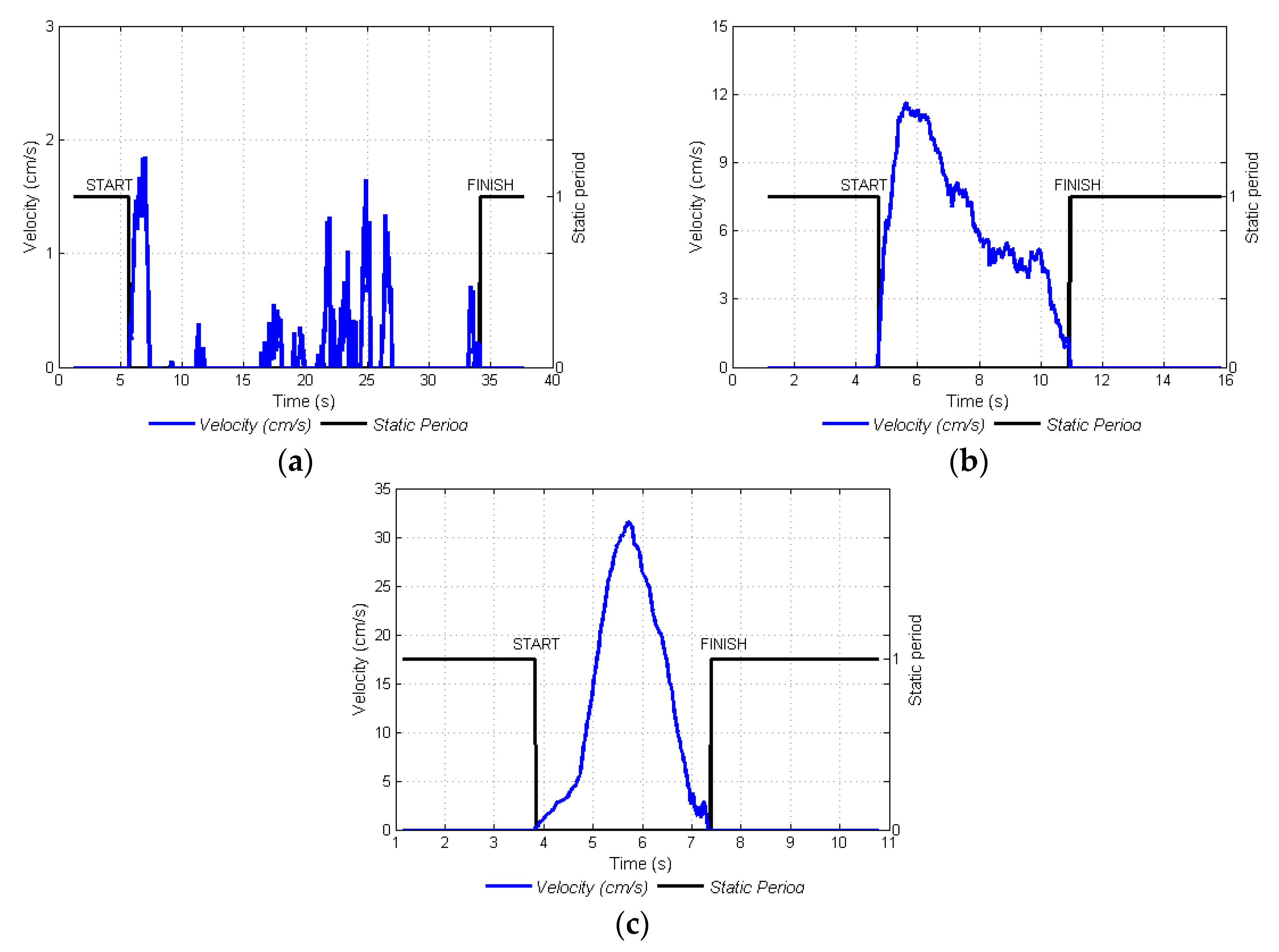
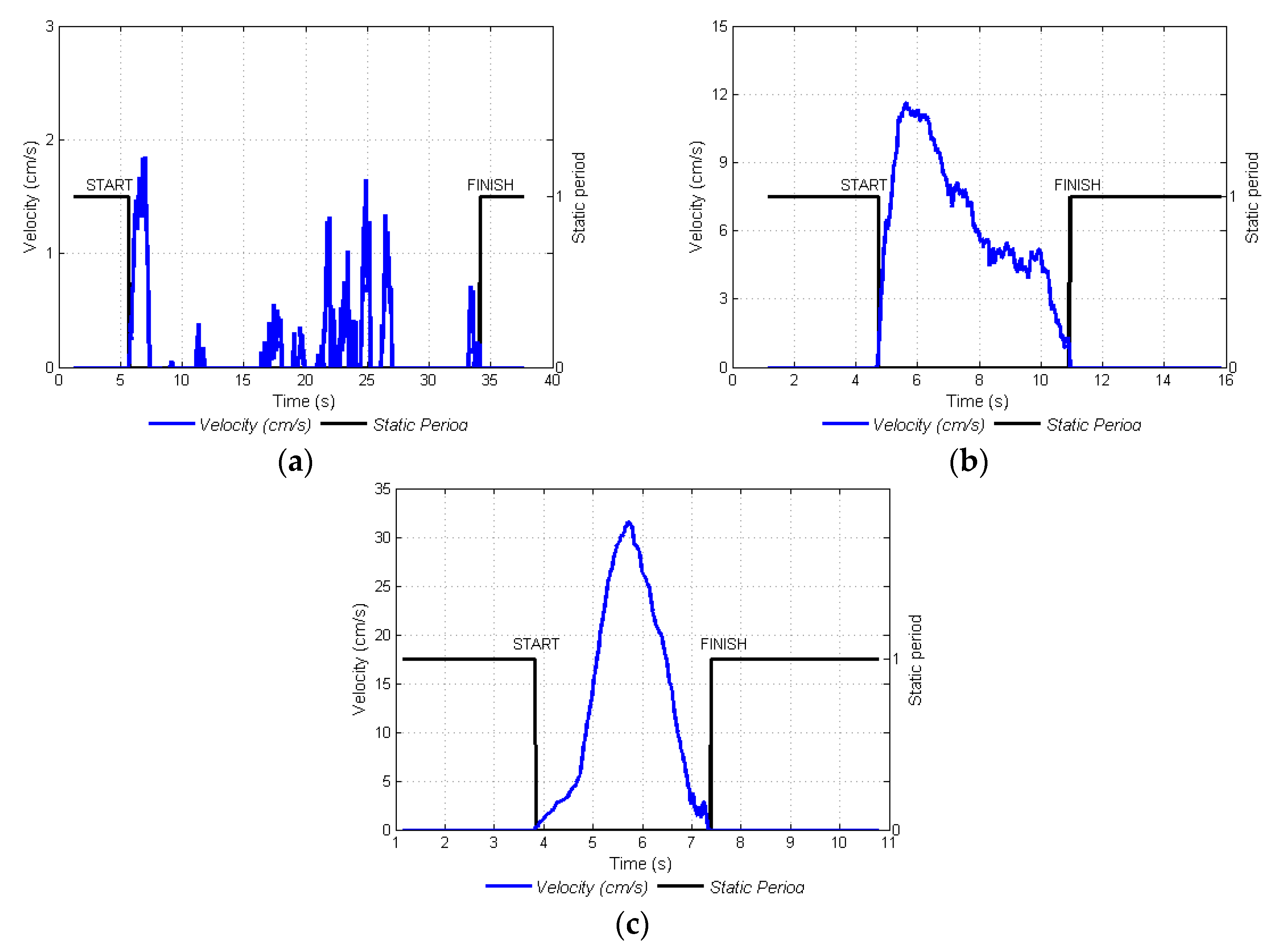
3.2.2. Static Periods
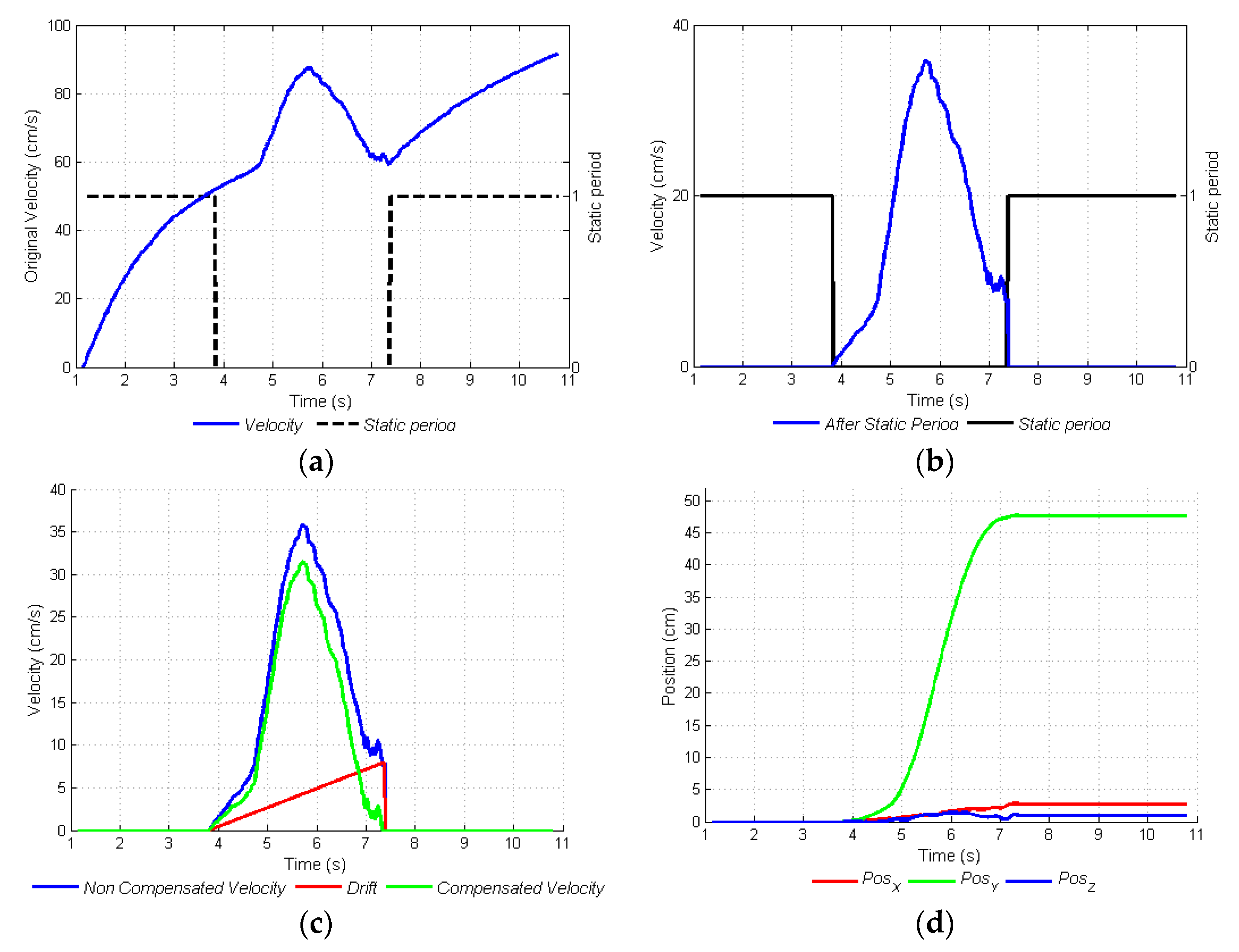
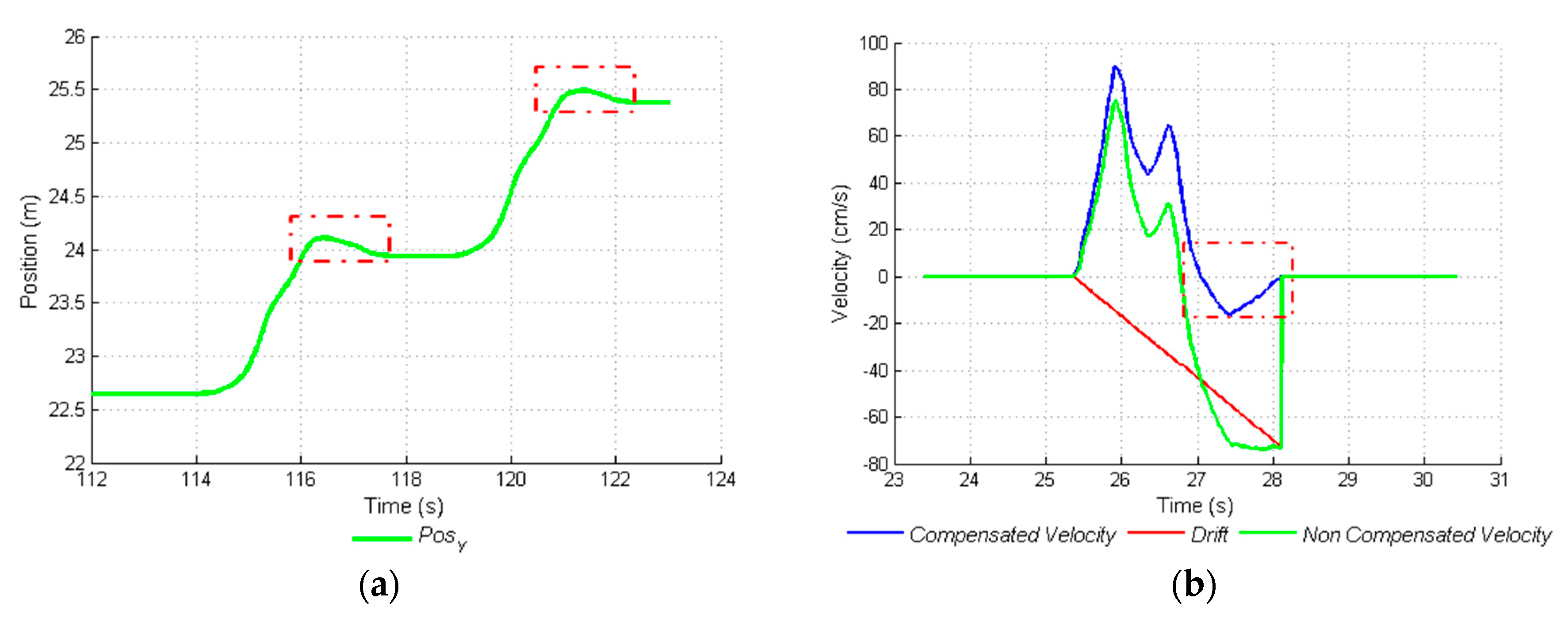
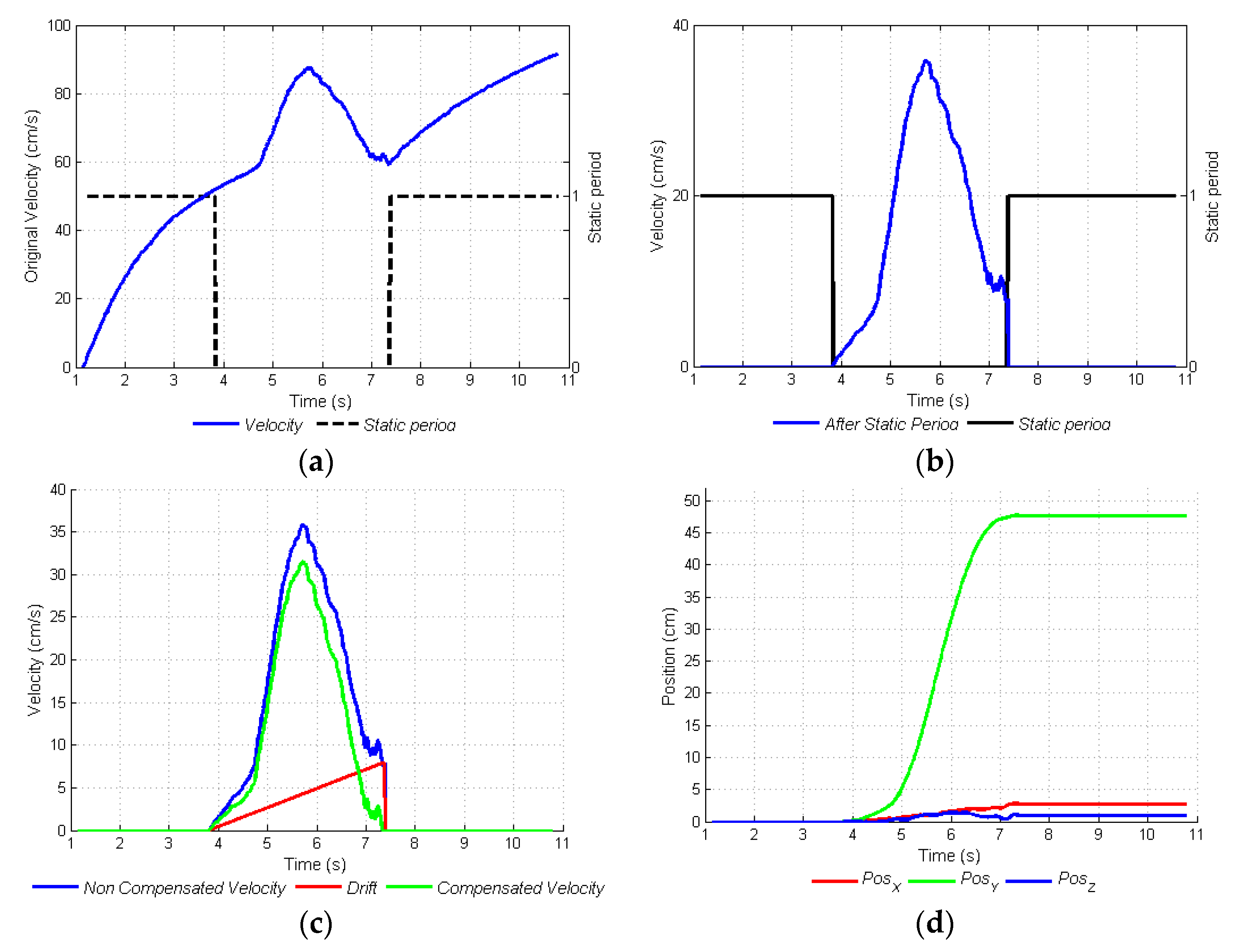
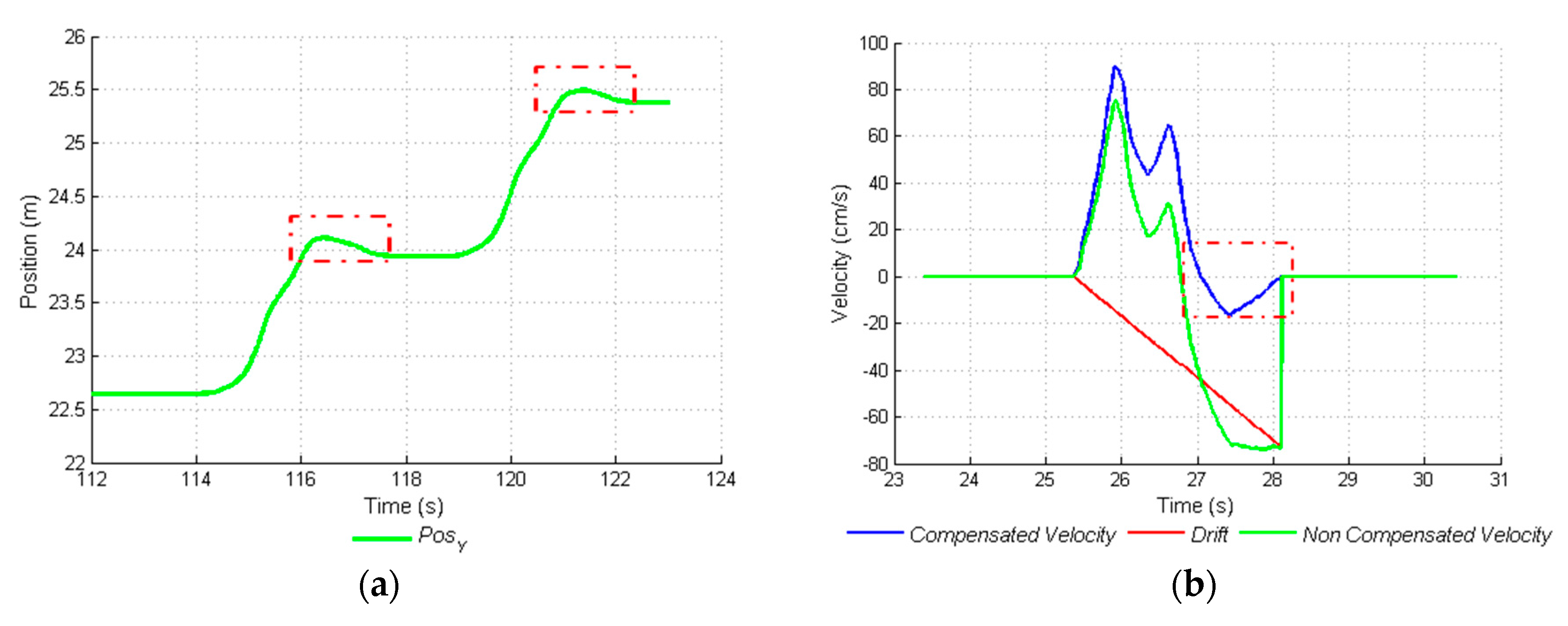
3.2.3. Velocity and Displacement, Compensation of the DRIFT
4. Results
4.1. Calibration and Evaluation of the Proposed INS in Navigation Mode (NM)
4.1.1. Calibration of Navigation Mode
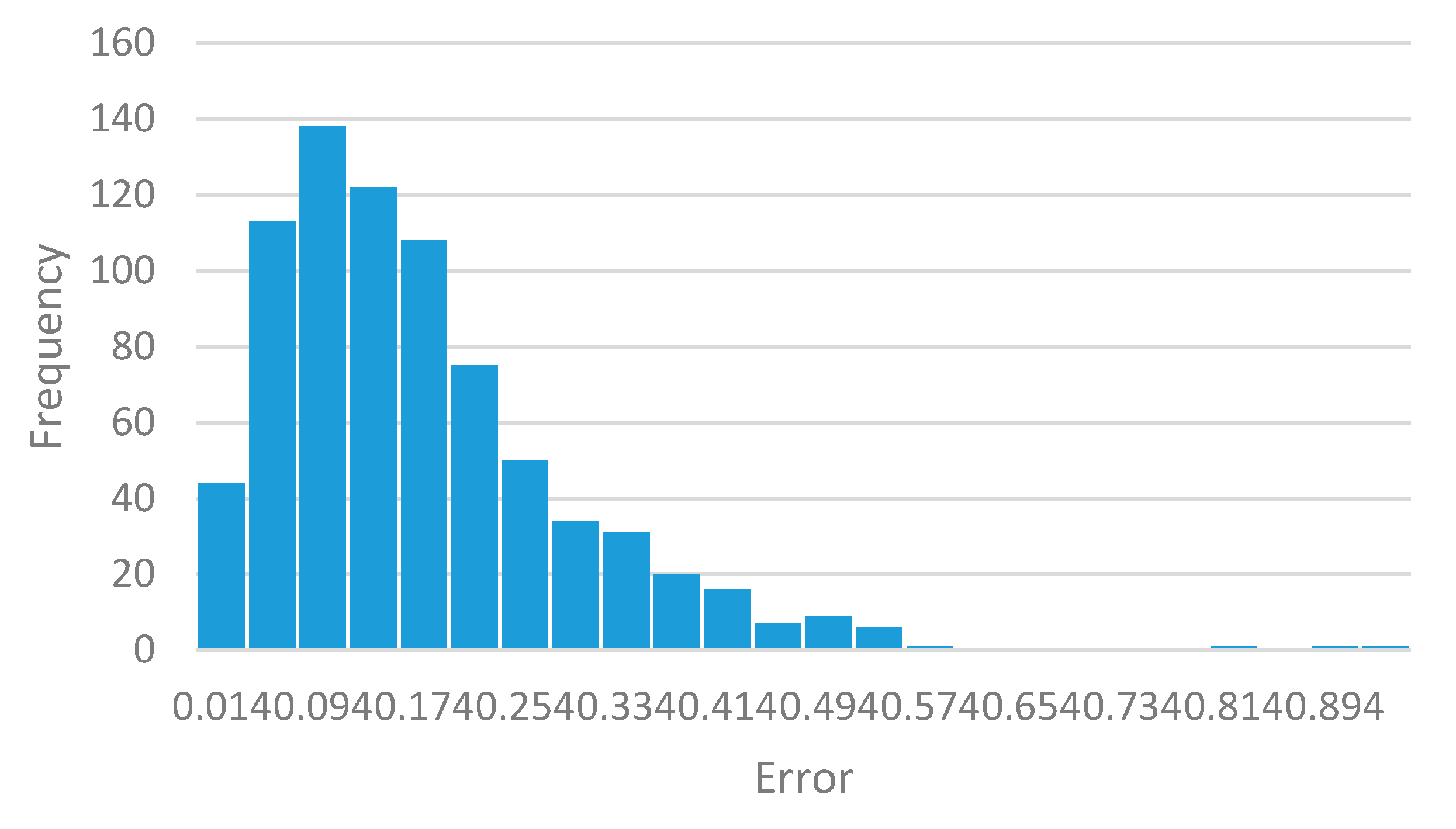
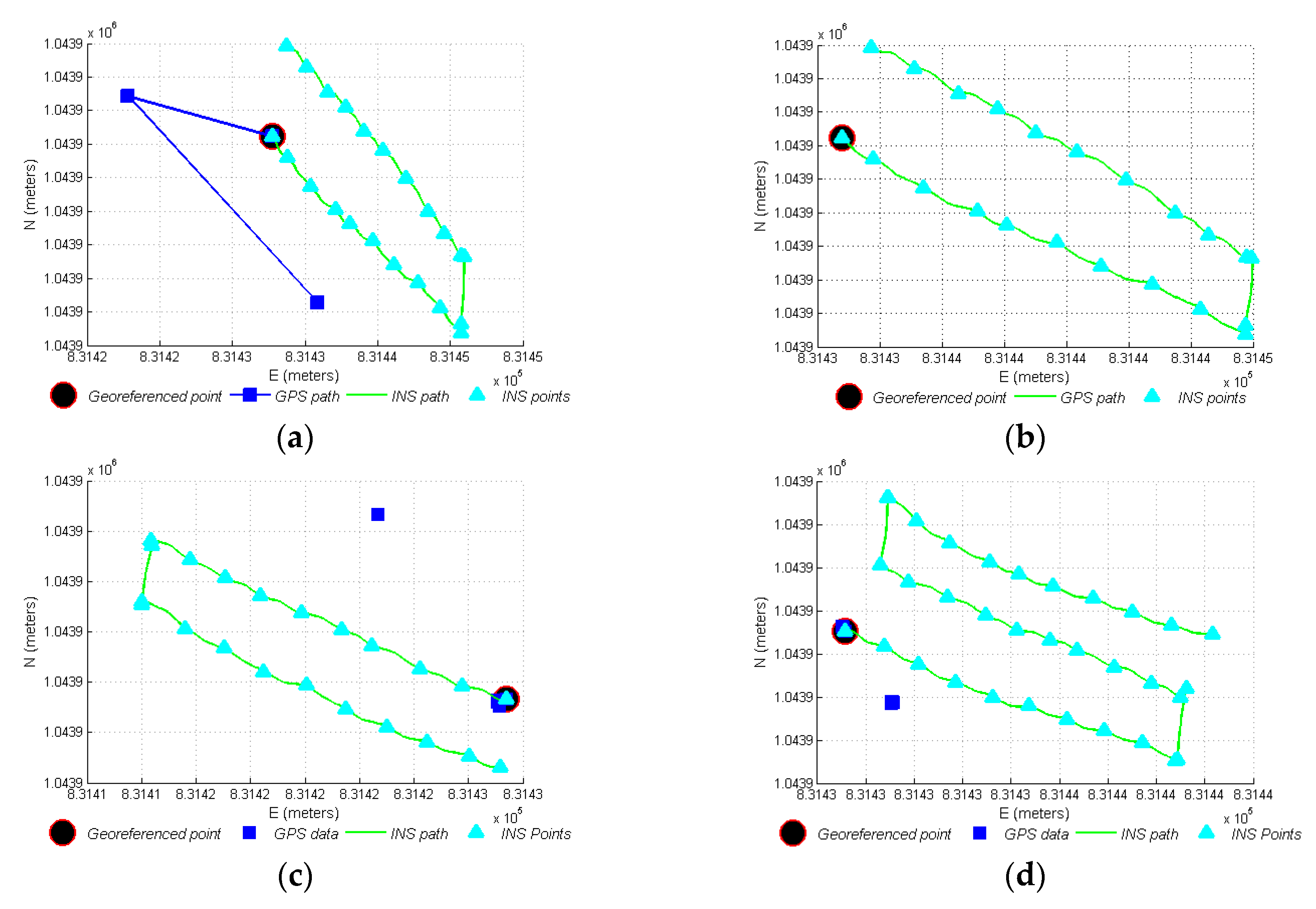
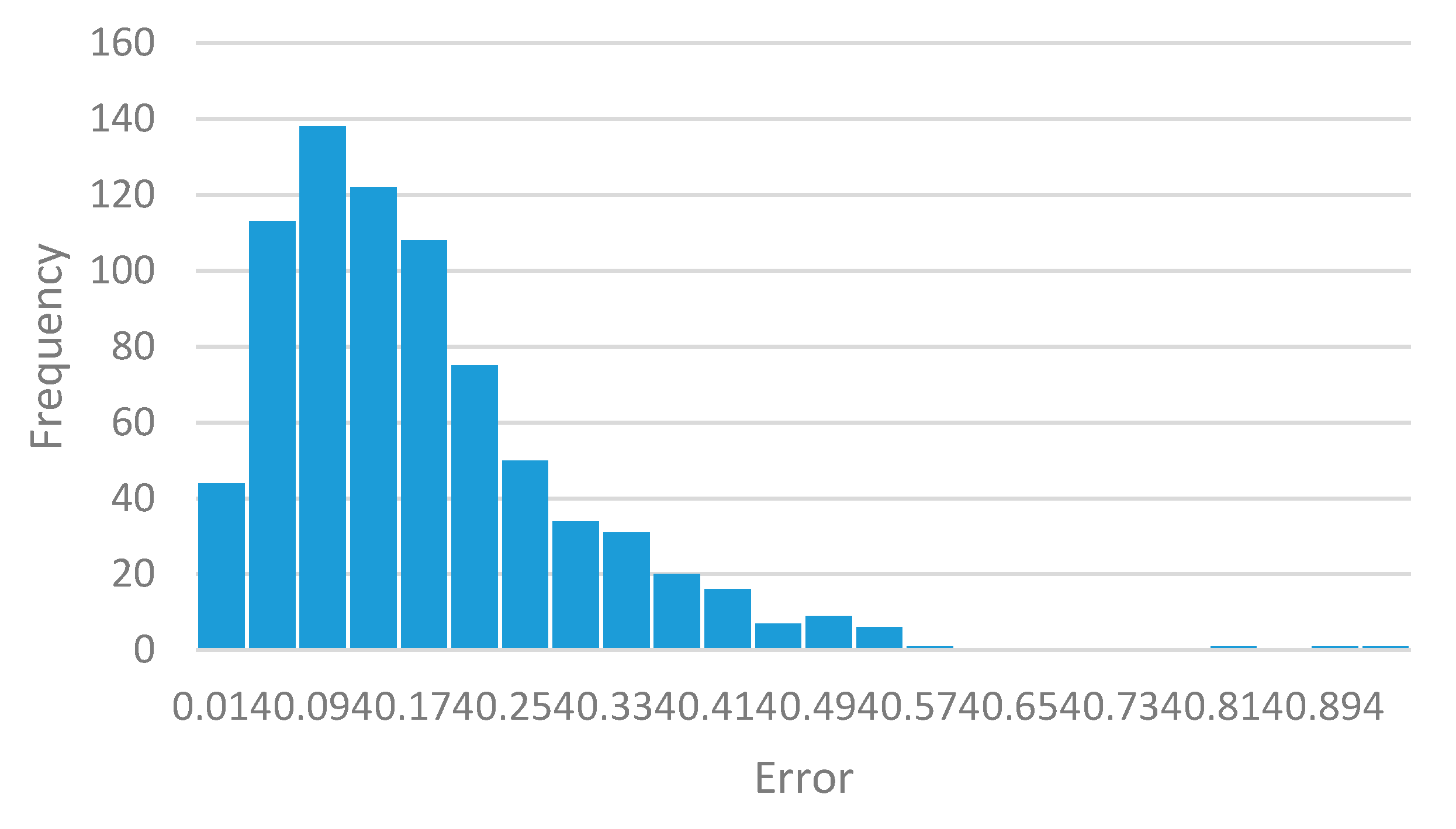
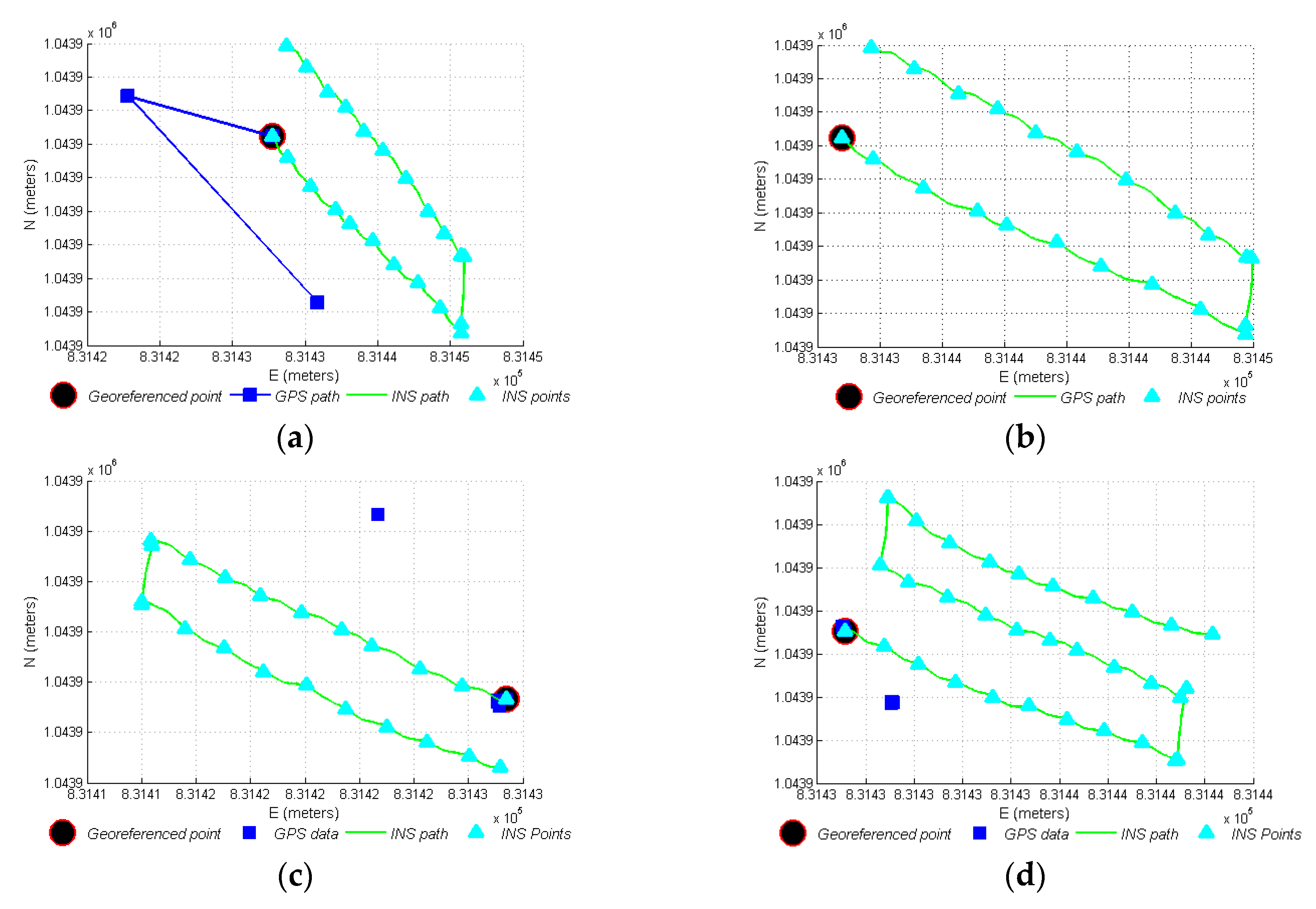
4.1.2. Evaluation of Navigation Mode
4.2. Evaluation of the Proposed INS in Image Acquisition Control Mode ACM
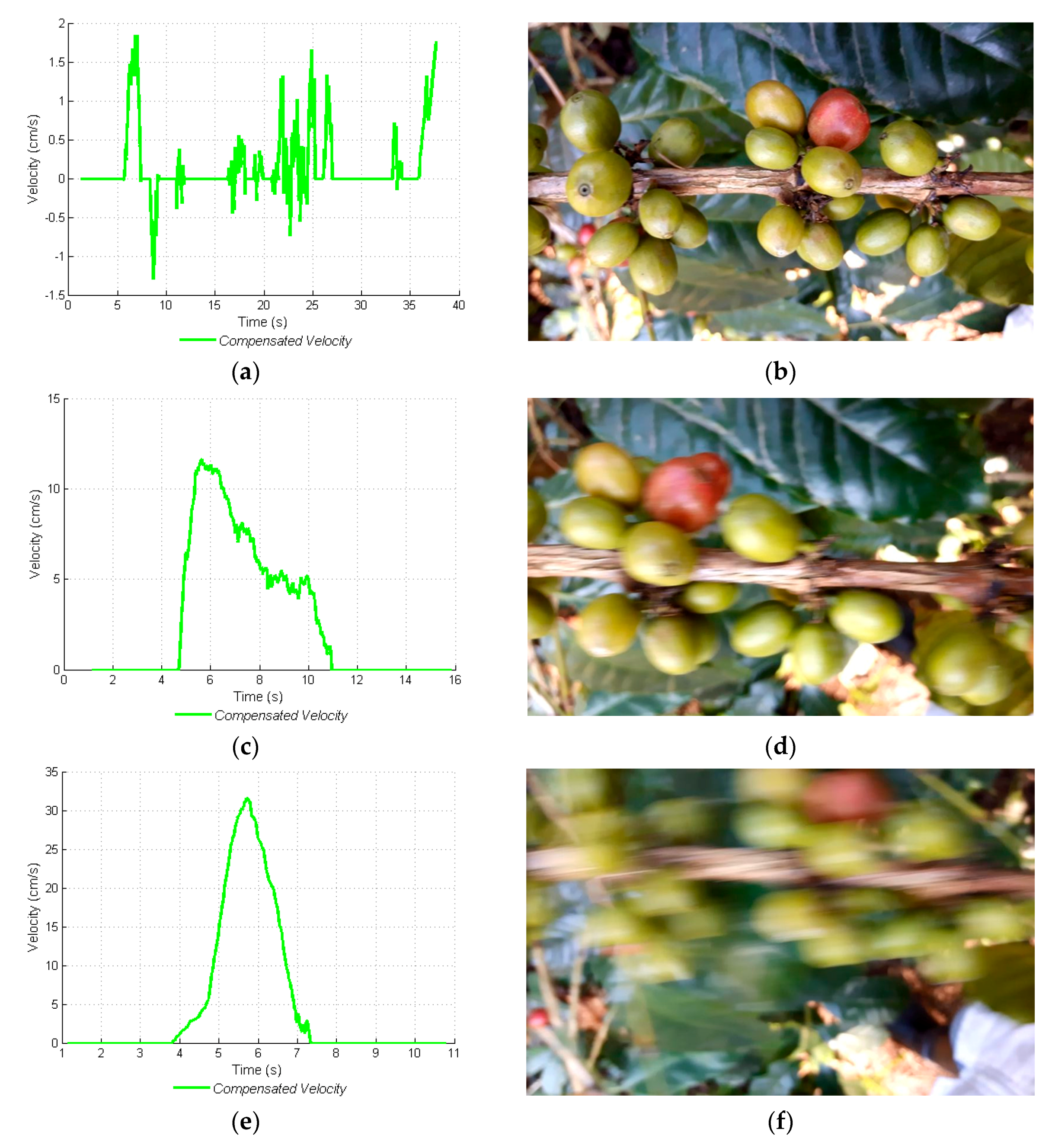
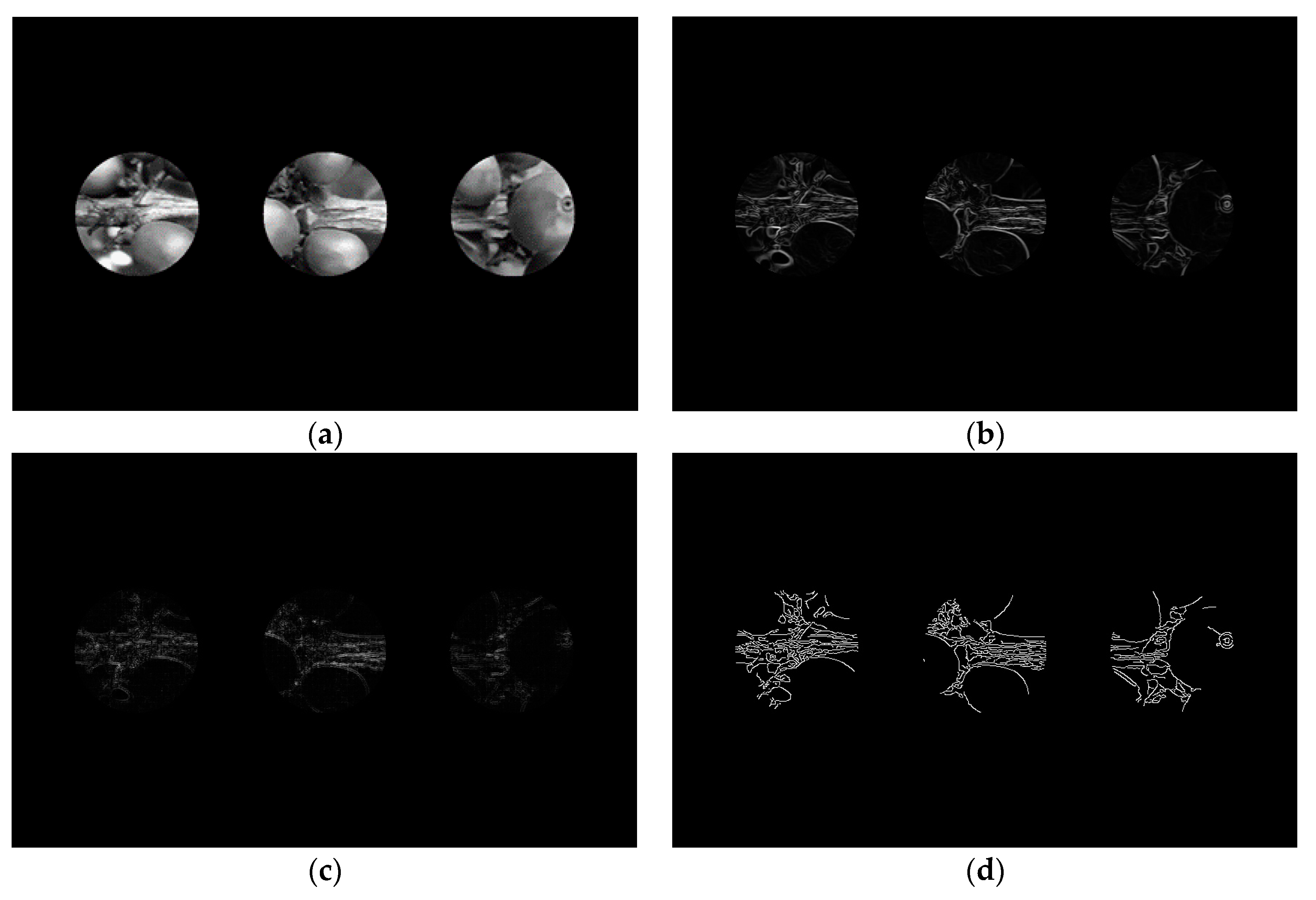
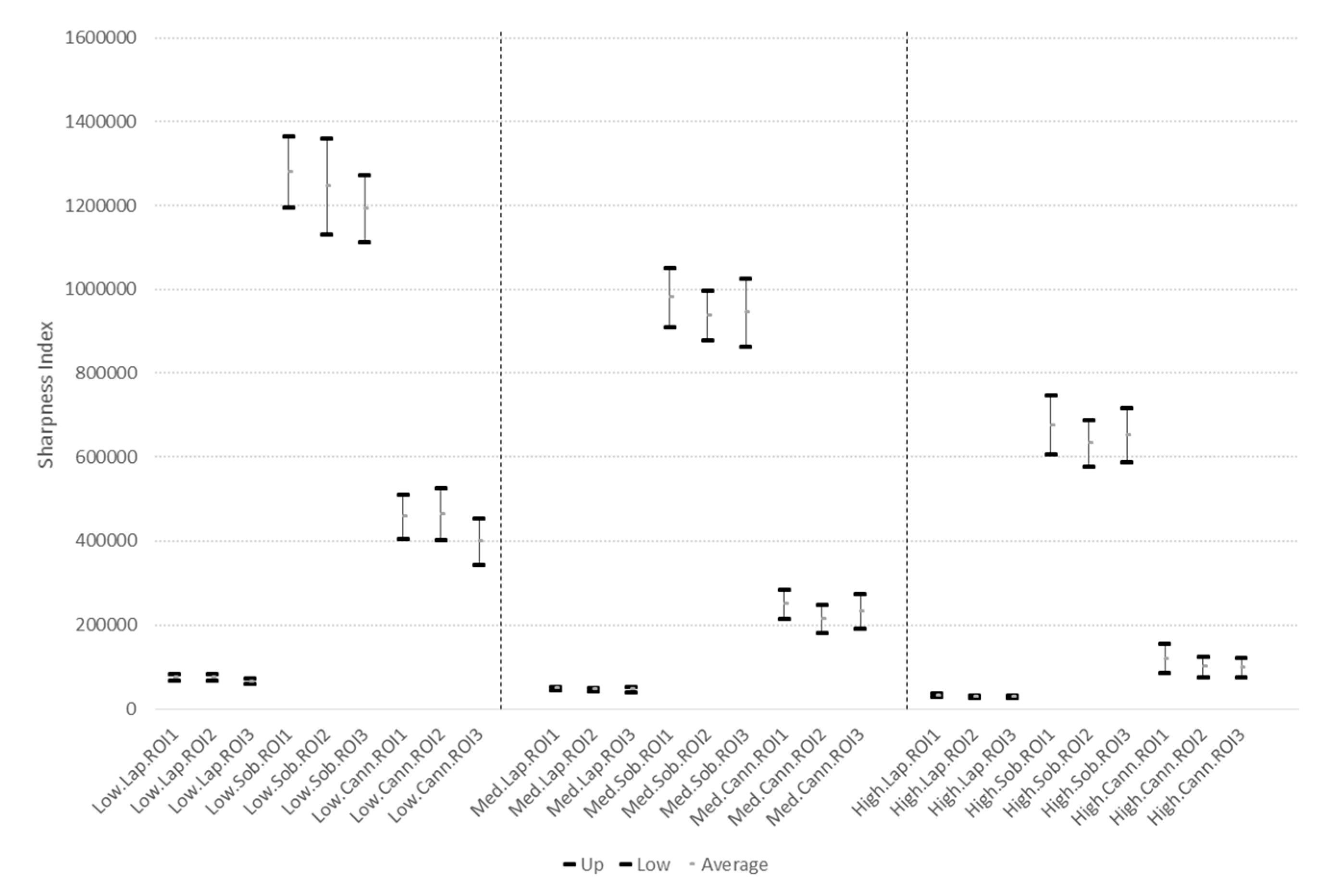
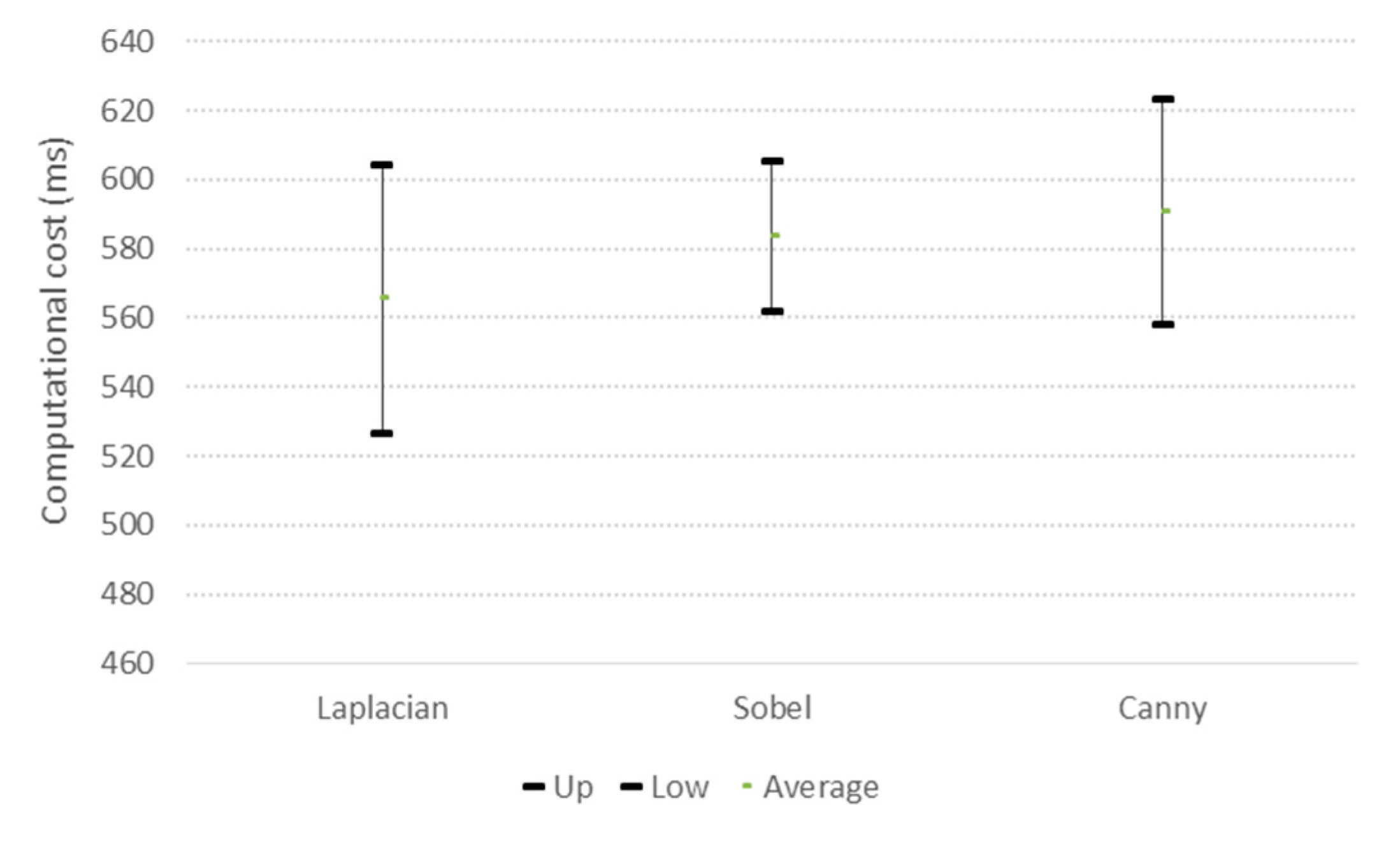
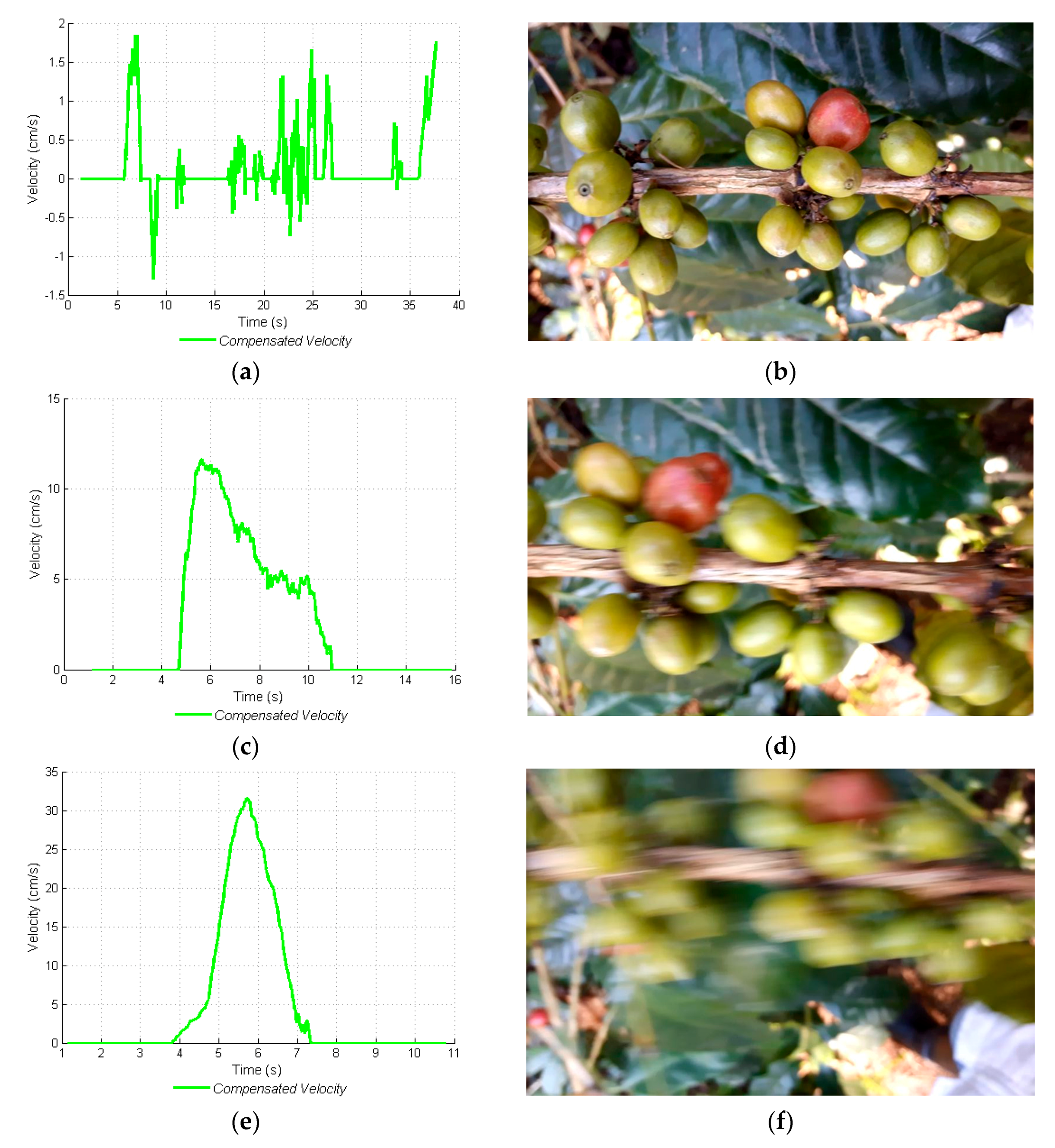
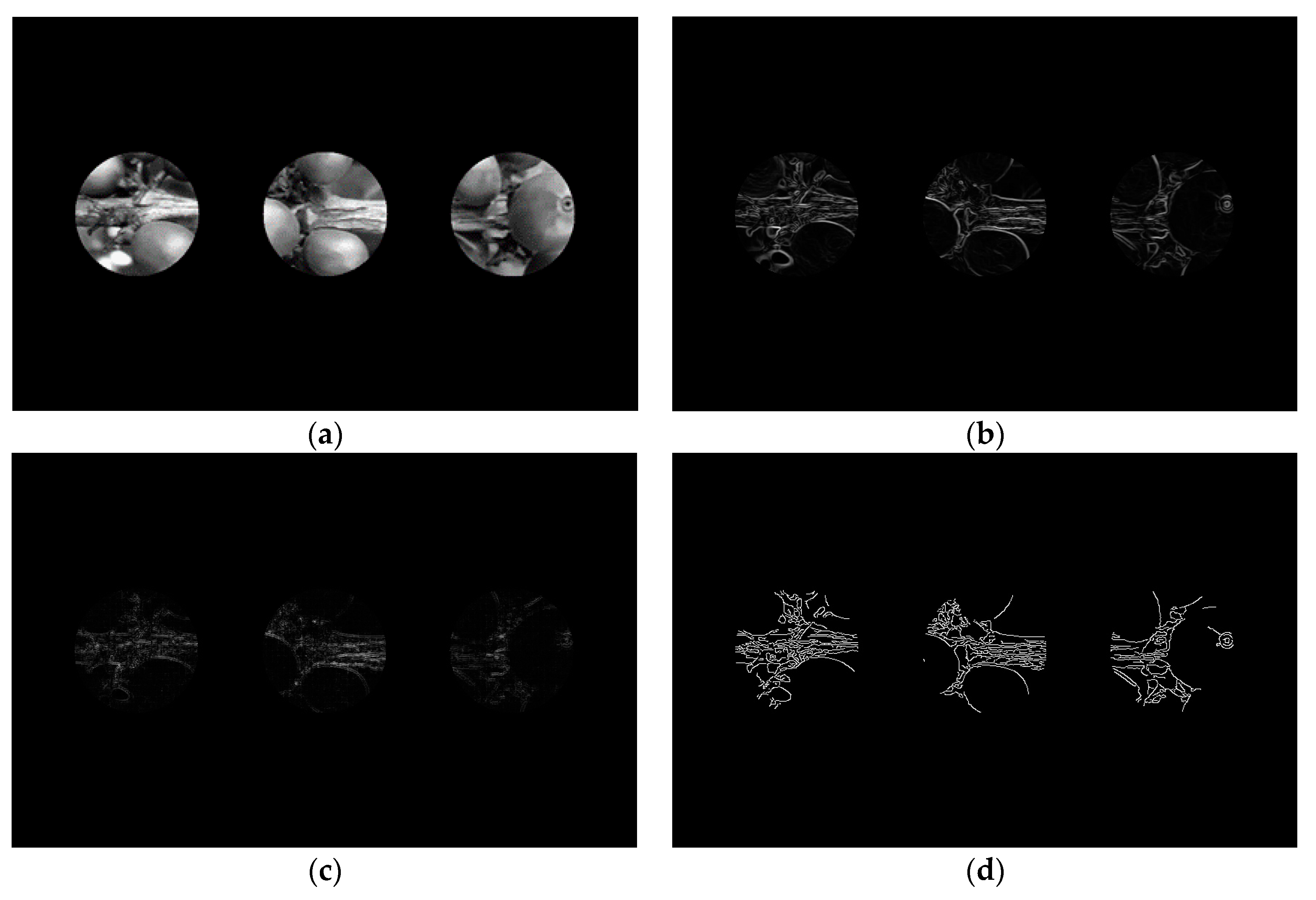
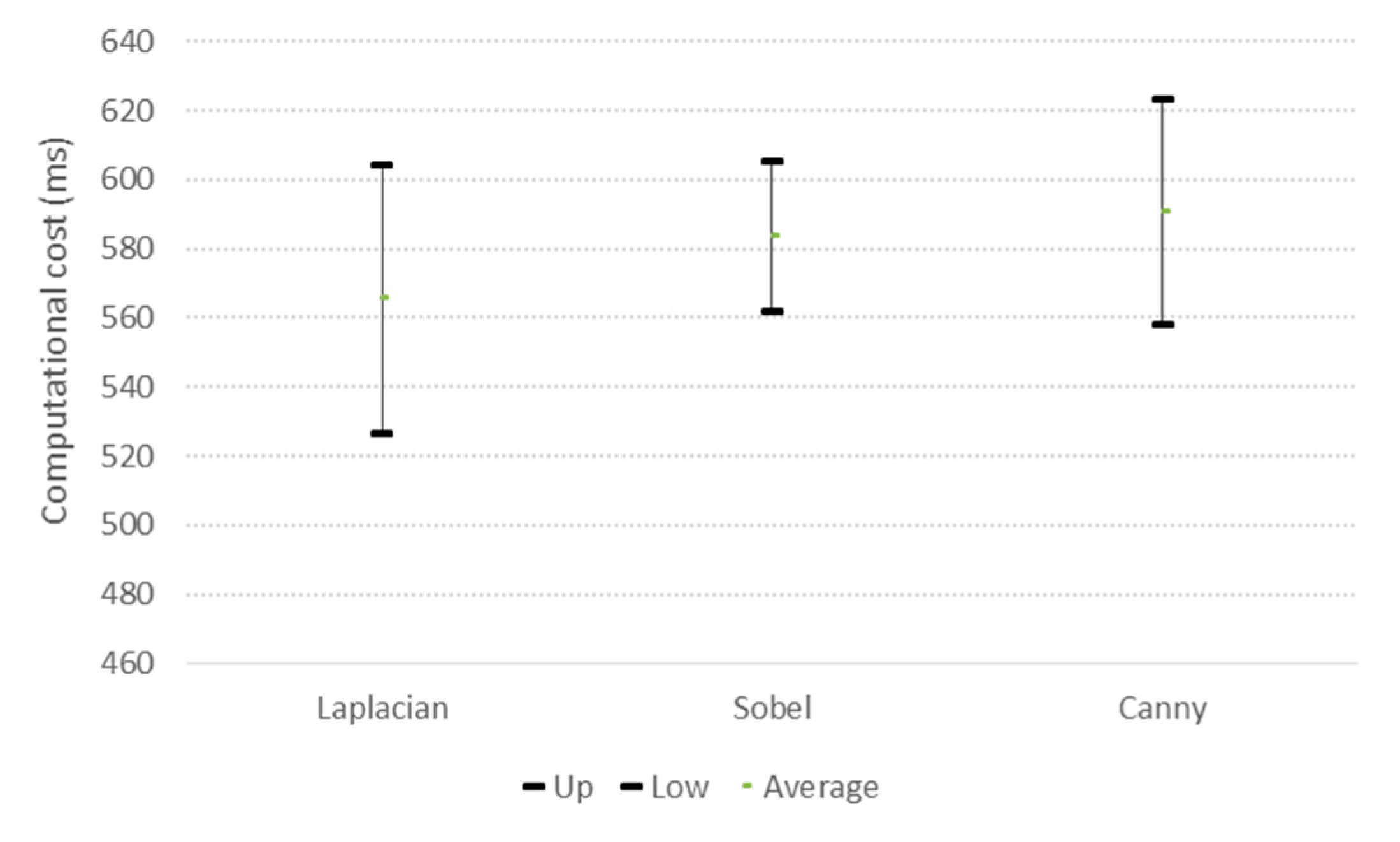
4.3. Video Acquisition and Image Analysis for Selection Video Frames
Calculation of Blurriness and Sharpness Indexes from Acquired Images at Different Velocities
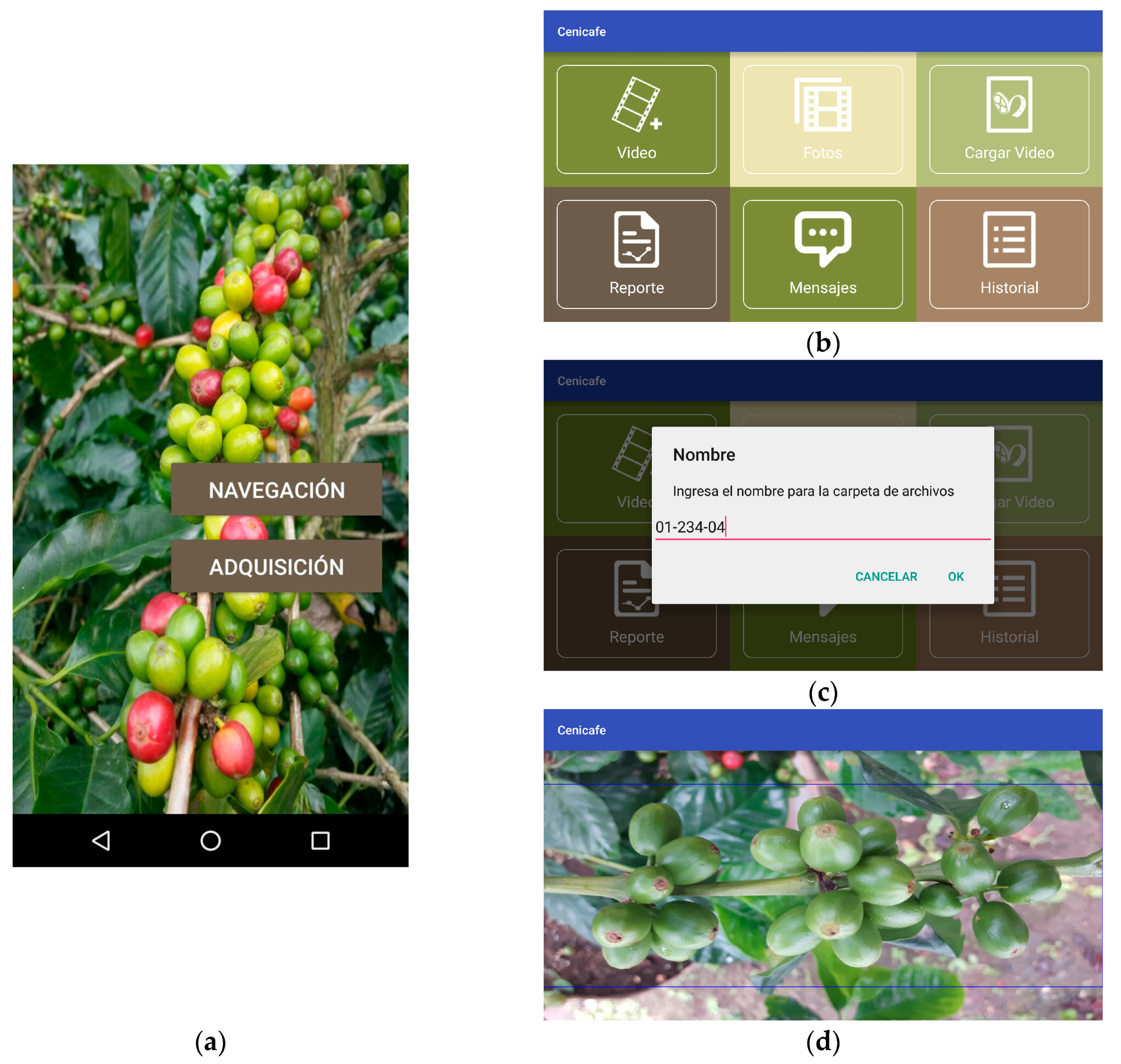
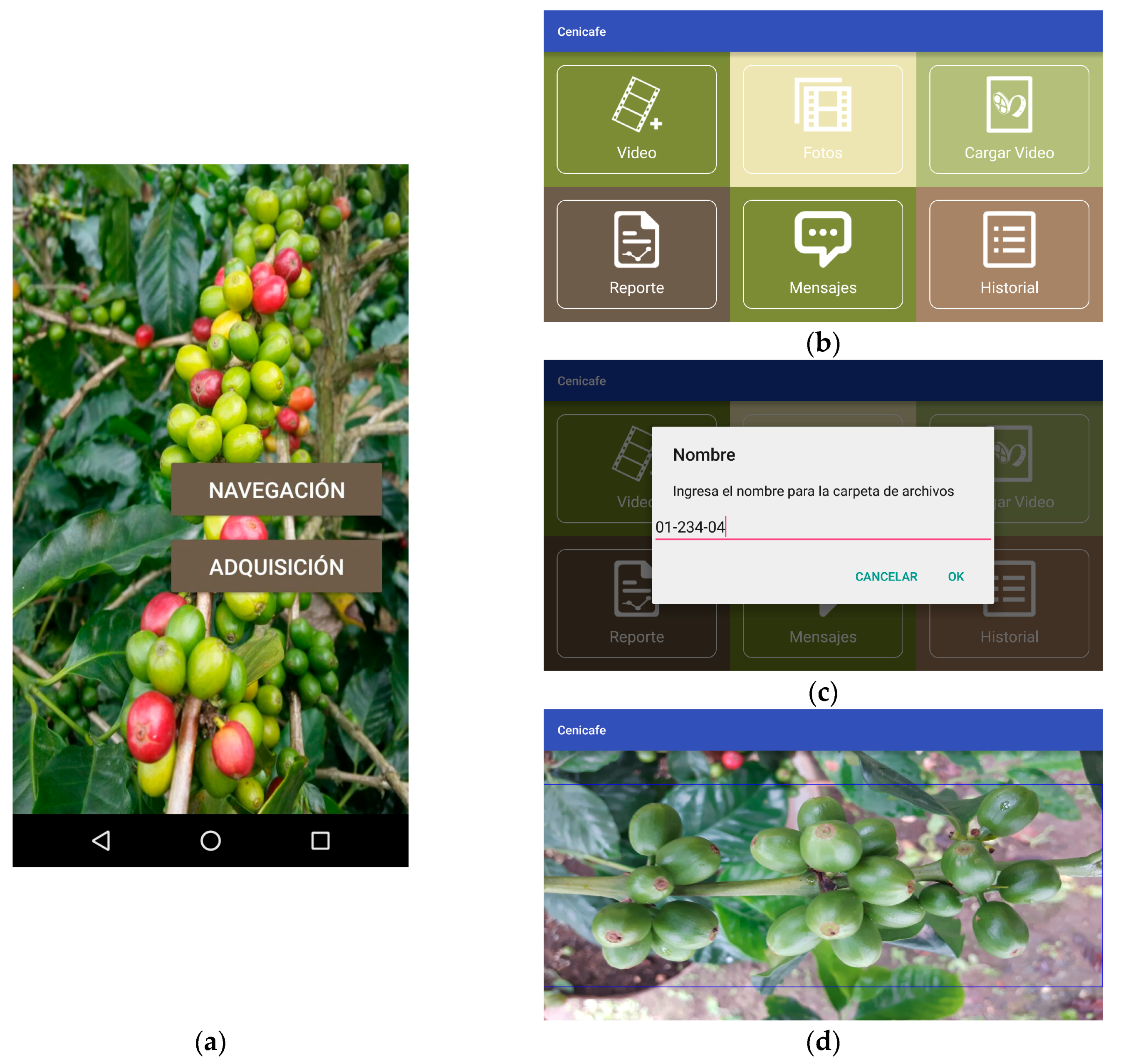
4.4. Mobile Application Interface for Navigation and Image Acquisition on Coffee Plantations
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sumriddetchkajorn, S. How optics and photonics is simply applied in agriculture? In Proceedings of the International Conference on Photonics Solutions, Pattaya City, Thailand, 26–28 May 2013. [Google Scholar]
- Confalonieri, R.; Foi, M.; Casa, R.; Aquaro, S.; Tona, E.; Peterle, M.; Boldini, A.; De Carli, G.; Ferrari, A.; Finitto, G. Development of an App for Estimating Leaf Area Index Using a Smartphone. Trueness and Precision Determination and Comparison with Other Indirect Methods. Comput. Electron. Agric. 2013, 96, 67–74. [Google Scholar] [CrossRef]
- Viscarra Rossel, R.A.; Webster, R. Discrimination of Australian Soil Horizons and Classes from Their Visible–Near Infrared Spectra. Eur. J. Soil Sci. 2011, 62, 637–647. [Google Scholar] [CrossRef]
- Abdullahi, H.S.; Mahieddine, F.; Sheriff, R.E. Technology Impact on Agricultural Productivity: A Review of Precision Agriculture Using Unmanned Aerial Vehicles. In Wireless and Satellite Systems; Pillai, P., Hu, Y.F., Otung, I., Giambene, G., Eds.; Springer International Publishing: Bradford, UK, 2015; pp. 388–400. [Google Scholar]
- Liu, B.; Koc, A.B. SafeDriving: A Mobile Application for Tractor Rollover Detection and Emergency Reporting. Comput. Electron. Agric. 2013, 98, 117–120. [Google Scholar] [CrossRef]
- Murakami, Y. iFarm: Development of Web-Based System of Cultivation and Cost Management for Agriculture. In Proceedings of the 2014 Eighth International Conference on Complex, Intelligent and Software Intensive Systems, Fukuoka, Japan; 2014; pp. 624–627. [Google Scholar]
- Lee, J.; Kim, H.-J.; Park, G.-L.; Kwak, H.-Y.; Kim, C.M. Intelligent Ubiquitous Sensor Network for Agricultural and Livestock Farms. In Algorithms and Architectures for Parallel Processing; Xiang, Y., Cuzzocrea, A., Hobbs, M., Zhou, W., Eds.; Springer: Berlin, Germany, 2011; pp. 196–204. [Google Scholar]
- Intaravanne, Y.; Sumriddetchkajorn, S. BaiKhao (rice leaf) app: A mobile device-based applicaion in analyzing the color level of the rice leaf for nitrogen estimation. Proc. SPIE 2012, 8558. [Google Scholar] [CrossRef]
- De Bei, R.; Fuentes, S.; Gilliham, M.; Tyerman, S.; Edwards, E.; Bianchini, N.; Smith, J.; Collins, C. VitiCanopy: A Free Computer App to Estimate Canopy Vigor and Porosity for Grapevine. Sensors 2016, 16, 585. [Google Scholar] [CrossRef] [PubMed]
- Verma, U.; Rossant, F.; Bloch, I.; Orensanz, J.; Boisgontier, D. Shape-Based Segmentation of Tomatoes for Agriculture Monitoring. In Proceedings of the International Conference on Pattern Recognition Applications and Methods, Loire Valley, France, 6–8 March 2014. [Google Scholar]
- Guerrero, J.M.; Guijarro, M.; Montalvo, M.; Romeo, J.; Emmi, L.; Ribeiro, A.; Pajares, G. Automatic Expert System Based on Images for Accuracy Crop Row Detection in Maize Fields. Expert Syst. Appl. 2013, 40, 656–664. [Google Scholar] [CrossRef]
- Romeo, J.; Pajares, G.; Montalvo, M.; Guerrero, J.M.; Guijarro, M.; de la Cruz, J.M. A New Expert System for Greenness Identification in Agricultural Images. Expert Syst. Appl. 2013, 40, 2275–2286. [Google Scholar] [CrossRef]
- Kurtulmuş, F.; Kavdir, İ. Detecting Corn Tassels Using Computer Vision and Support Vector Machines. Expert Syst. Appl. 2014, 41, 7390–7397. [Google Scholar] [CrossRef]
- Hunt, E.R.; Daughtry, C.S.T.; Mirsky, S.B.; Hively, W.D. Remote Sensing With Simulated Unmanned Aircraft Imagery for Precision Agriculture Applications. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4566–4571. [Google Scholar] [CrossRef]
- Patel, H.N.; Jain, R.K.; Joshi, M.V. Fruit Detection using Improved Multiple Features based Algorithm. Int. J. Comput. Appl. 2011, 13, 1–5. [Google Scholar] [CrossRef]
- Nielsen, M.; Slaughter, D.C.; Gliever, C. Vision-Based 3D Peach Tree Reconstruction for Automated Blossom Thinning. IEEE Trans. Ind. Inf. 2012, 8, 188–196. [Google Scholar] [CrossRef]
- Dey, D.; Mummert, L.; Sukthankar, R. Classification of plant structures from uncalibrated image sequences. In Proceedings of the 2012 IEEE Workshop on the Applications of Computer Vision (WACV), Auckland, New Zealand, 9–11 January 2012; pp. 329–336. [Google Scholar]
- Lati, R.N.; Filin, S.; Eizenberg, H. Estimating Plant Growth Parameters Using an Energy Minimization-Based Stereovision Model. Comput. Electron. Agric. 2013, 98, 260–271. [Google Scholar] [CrossRef]
- Gómez-Robledo, L.; López-Ruiz, N.; Melgosa, M.; Palma, A.J.; Capitán-Vallvey, L.F.; Sánchez-Marañón, M. Using the Mobile Phone as Munsell Soil-Colour Sensor: An Experiment under Controlled Illumination Conditions. Comput. Electron. Agric. 2013, 99, 200–208. [Google Scholar] [CrossRef]
- Canagarajah, N.; Jhunjhunwala, A.; Umadikar, J.; Prashant, S. A New Personalized Agriculture Advisory System. In Proceedings of the 2013 19th European Wireless Conference (EW), Guildford, UK, 16–18 April 2013. [Google Scholar]
- Onofre Trindade, J.; Luciano, O.N.; Luís, F.C.; Rosane, M.; Castelo Branco, K.R.L.J. A Toolbox for Aerial Image Acquisition and its Application to Precision Agriculture. Google Academico. Available online: http://www.cs.cmu.edu/~mbergerm/agrobotics2012/05Trindade.pdf (accessed on 15 December 2016).
- Francisco, R.M. Global 3D Terrain Maps for Agricultural Applications; Intech: Rijeka, Criatia, 2011; pp. 227–242. [Google Scholar]
- Dabove, P.; Ghinamo, G.; Lingua, A.M. Inertial Sensors for Smartphones Navigation. SpringerPlus 2015, 4, 834. [Google Scholar] [CrossRef] [PubMed]
- Pongnumkul, S.; Chaovalit, P.; Surasvadi, N. Applications of Smartphone-Based Sensors in Agriculture: A Systematic Review of Research. J. Sens. 2015, 2015, e195308. [Google Scholar] [CrossRef]
- Ramirez, V. Establecimiento de cafetales al sol. In Manual del Cafetero Colombiano: Investigación y Tecnología Para la Sostenibilidad de la Caficultura; FNC-Cenicafe: Manizales, Colombia, 2013; pp. 28–43. [Google Scholar]
- Cilas, C.; Descroix, F. Yield Estimation and Harvest Period. In Coffee: Growing, Processing, Sustainable Production; Wintgens, J.N., Ed.; Wiley-VCH Verlag GmbH: Weinheim, Germany, 2004; pp. 593–603. [Google Scholar]
- Upreti, G.; Bittenbender, H.C.; Ingamells, J.L. Rapid estimation of coffee yield. In Proceedings of the Fourteenth International Scientific Colloquium on Coffee, San Francisco, CA, USA, 14–19 July 1991; pp. 585–593. [Google Scholar]
- Arcila, J.; Farfán, F.; Moreno, A.; Salazar, L.F.; Hincapié, E. Sistemas de Producción de café en Colombia; Federación Nacional de Cafeteros de Colombia: Manizales, Colombia, 2007. [Google Scholar]
- Avendaño, J.; Ramos, P.; Prieto, F. Classification of vegetal structures present in coffee branches using computer vision. In Proceedings of the 2016 4th CIGR International Conference of Agricultural Engineering, Aarhus, Denmark, 26–29 June 2016. [Google Scholar]
- Prowald, J.B.S. Calibraaión de Acelerómetros Para la Medida de Microaceleraciones en Aplicaciones Espaciales. Ph.D. Thesis, Universidad Politecnica de Madrid, Madrid, Spain, 2000. (In Spanish). [Google Scholar]
- Hofmann-Wellenhof, B.; Kienast, G.; Lichtenegger, H. GPS in der Praxis, 3rd ed.; Springer: New York, NY, USA, 1994. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Reference | Axes |
|---|---|---|
| Accelerometer | MPU6500 | 3 |
| Gyroscope | MPU6500 | 3 |
| Magnetometer | AK09911C | 3 |
| GPS | - | - |
| Constants | Linear Acceleration X | Linear Acceleration Y | Angular Velocity Y |
|---|---|---|---|
| K | 1.8 | 0.44 | 1.8 |
| min() | 0.15 | 0.15 | 0.05 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Giraldo, P.J.R.; Aguirre, Á.G.; Muñoz, C.M.; Prieto, F.A.; Oliveros, C.E. Sensor Fusion of a Mobile Device to Control and Acquire Videos or Images of Coffee Branches and for Georeferencing Trees. Sensors 2017, 17, 786. https://doi.org/10.3390/s17040786
Giraldo PJR, Aguirre ÁG, Muñoz CM, Prieto FA, Oliveros CE. Sensor Fusion of a Mobile Device to Control and Acquire Videos or Images of Coffee Branches and for Georeferencing Trees. Sensors. 2017; 17(4):786. https://doi.org/10.3390/s17040786
Chicago/Turabian StyleGiraldo, Paula Jimena Ramos, Álvaro Guerrero Aguirre, Carlos Mario Muñoz, Flavio Augusto Prieto, and Carlos Eugenio Oliveros. 2017. "Sensor Fusion of a Mobile Device to Control and Acquire Videos or Images of Coffee Branches and for Georeferencing Trees" Sensors 17, no. 4: 786. https://doi.org/10.3390/s17040786
APA StyleGiraldo, P. J. R., Aguirre, Á. G., Muñoz, C. M., Prieto, F. A., & Oliveros, C. E. (2017). Sensor Fusion of a Mobile Device to Control and Acquire Videos or Images of Coffee Branches and for Georeferencing Trees. Sensors, 17(4), 786. https://doi.org/10.3390/s17040786