Robust Multi-Frame Adaptive Optics Image Restoration Algorithm Using Maximum Likelihood Estimation with Poisson Statistics

 , ,
, ,
Abstract
:1. Introduction
2. Frame Selection Method and PSF Model
2.1. AO Image Degradation Model
2.2. Frame Selection Technique Based on Variance
| Algorithm 1 Frame selection |
|
2.3. PSF Model
3. Joint Blind Deconvolution Algorithm Based on Poisson Distribution
3.1. Estimators with Poisson Statistics
3.2. Algorithm Implementation for AO Image Restoration
| Algorithm 2 Steps for our proposed restoration algorithm |
|
4. Experimental Results
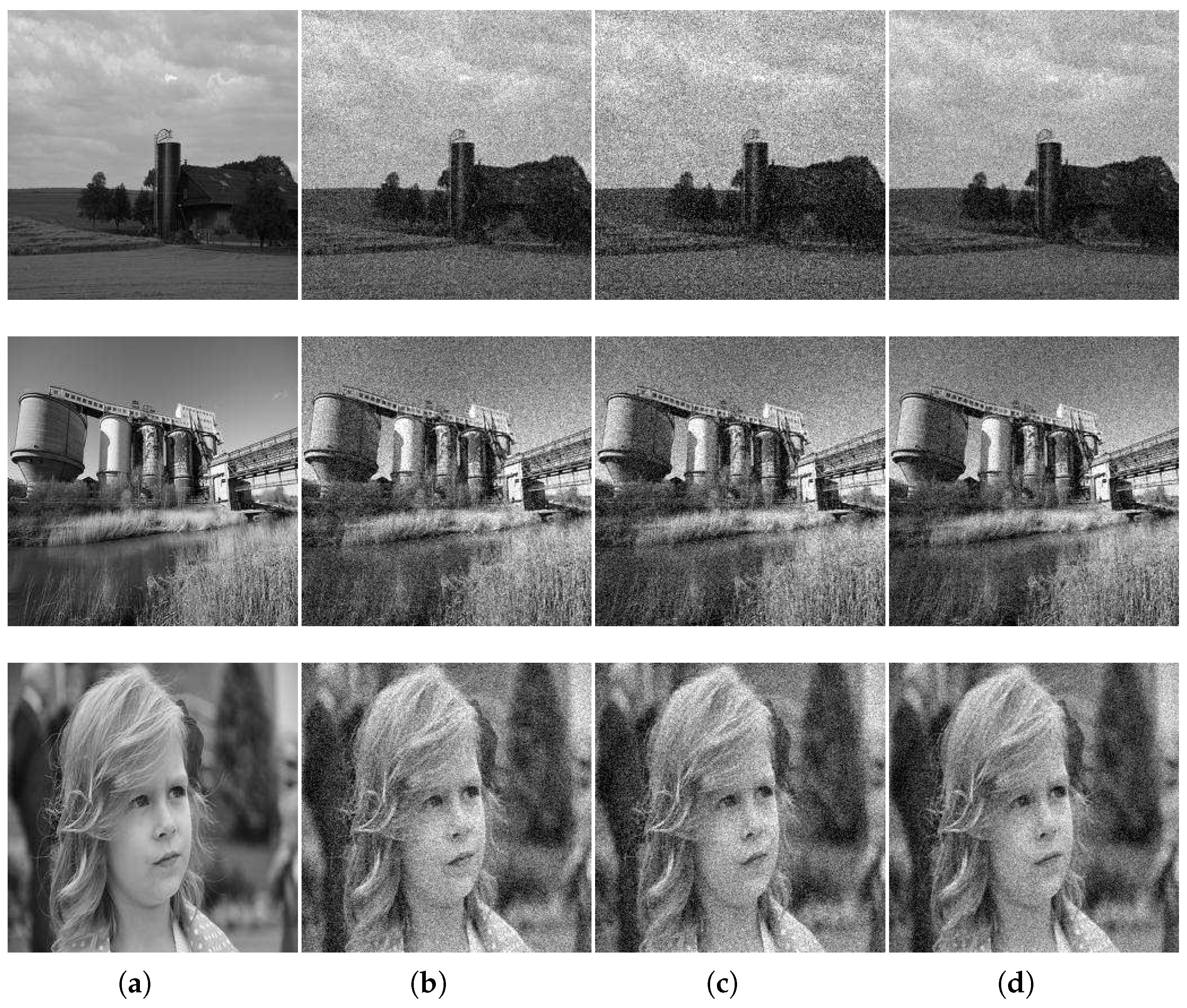
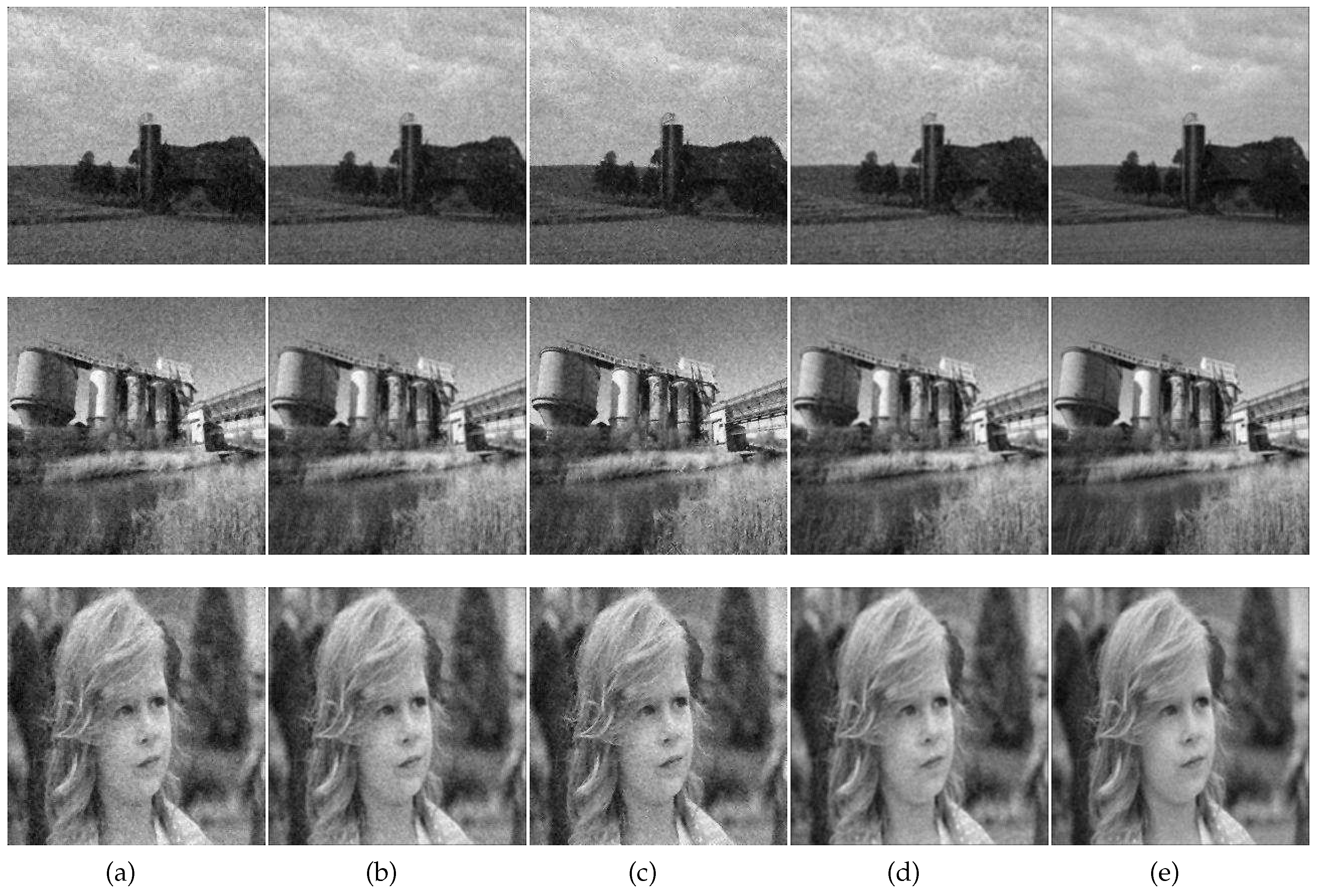
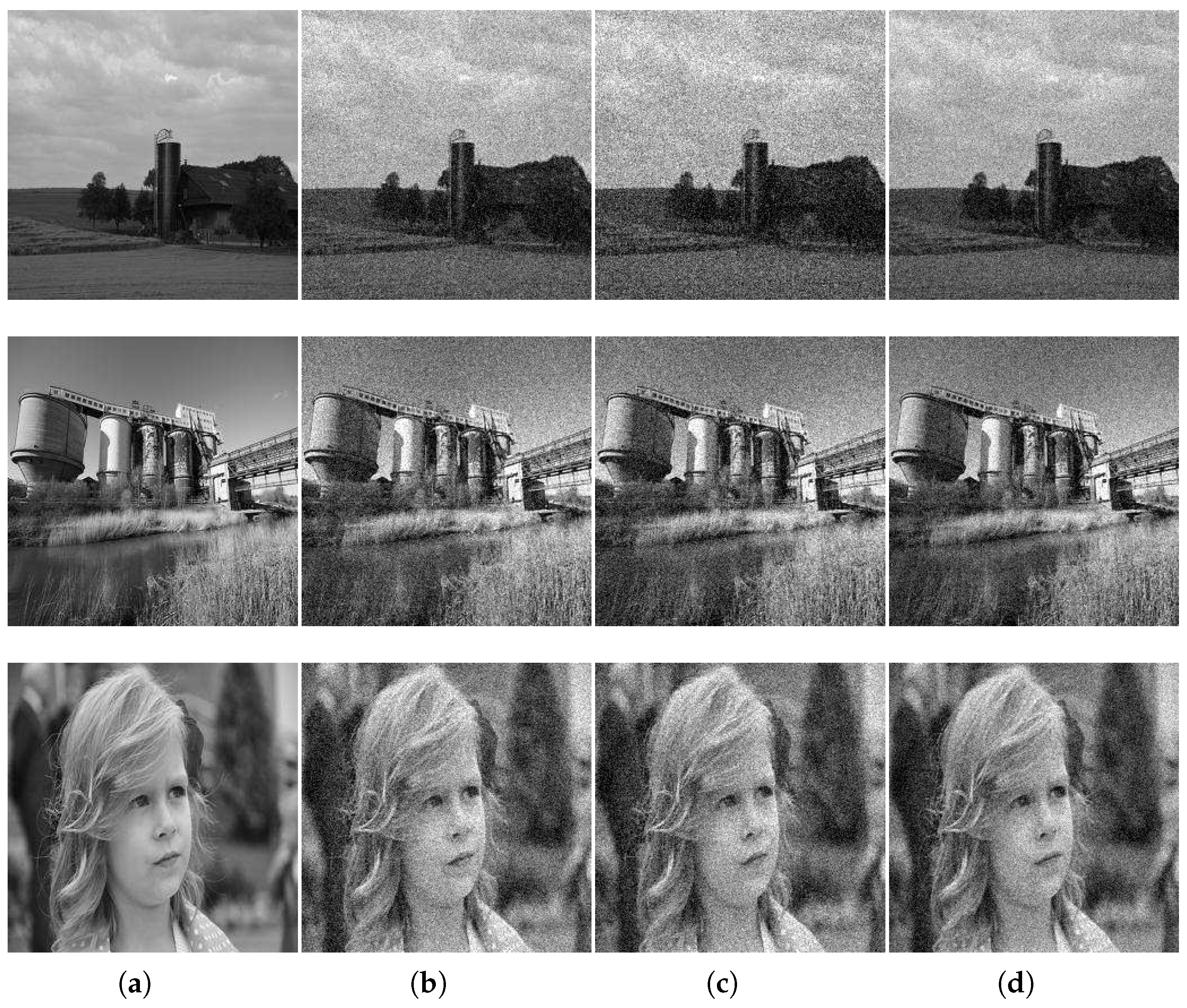
4.1. The Restoration Experiment on Simulated Images
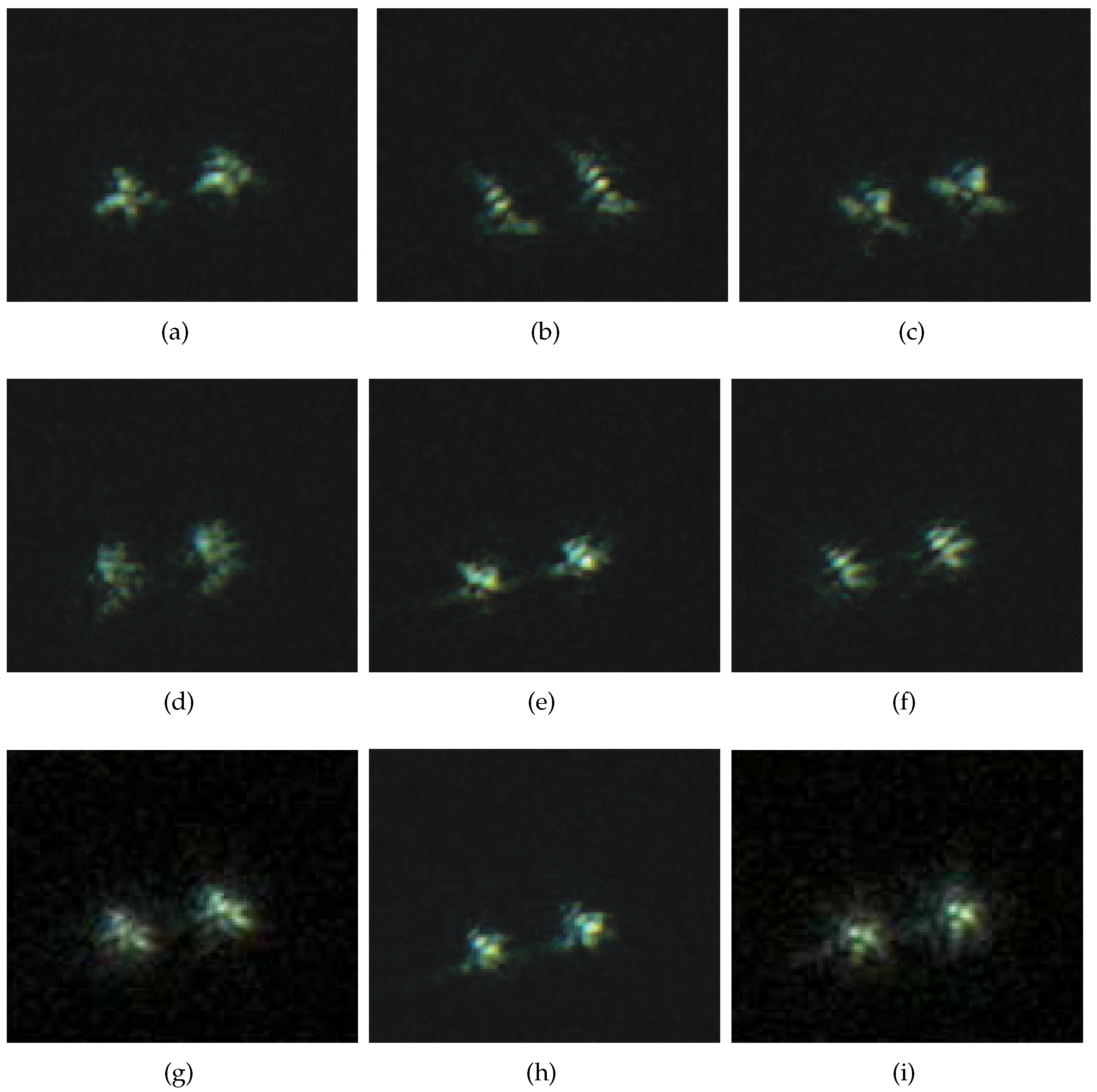
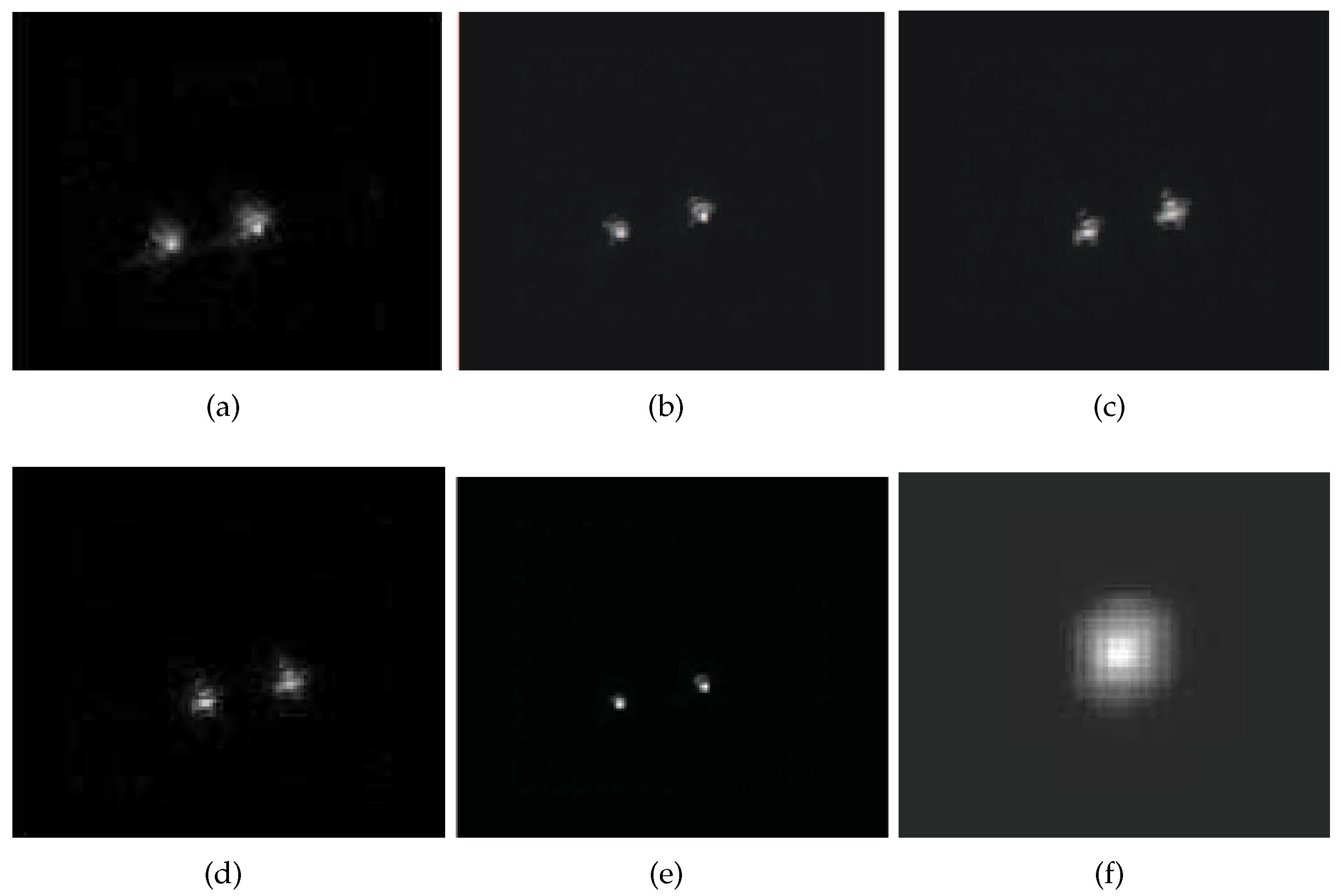
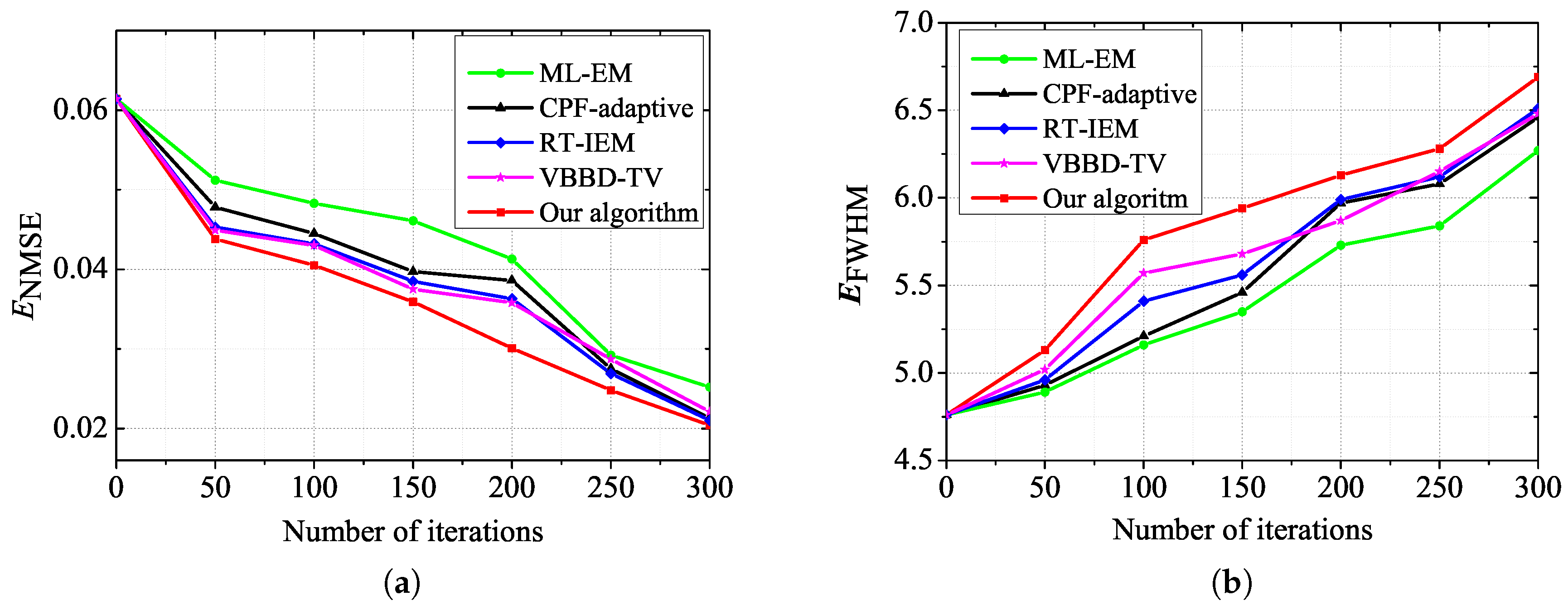
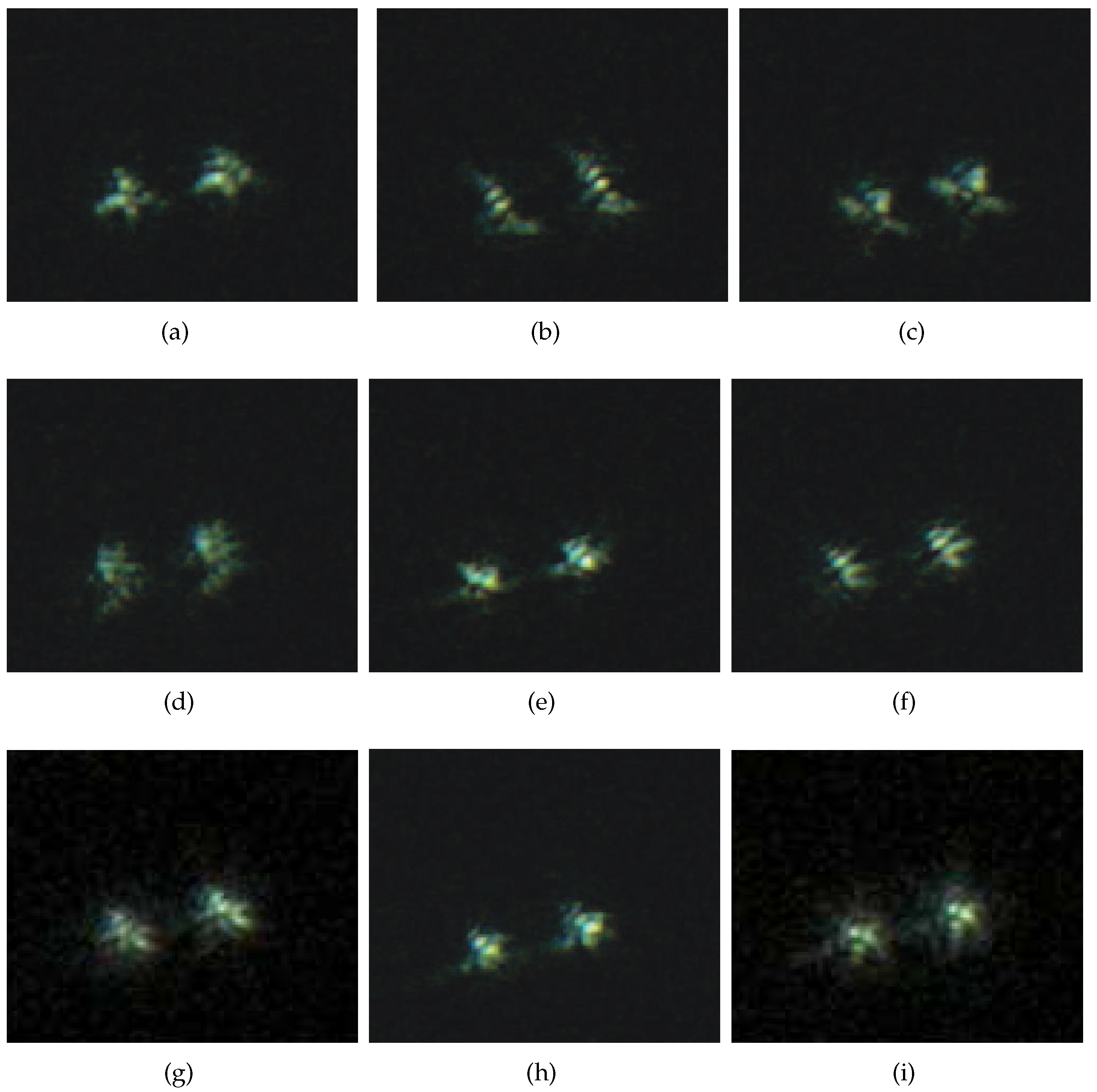
4.2. Restoration Experiments on Binary-Star AO Images
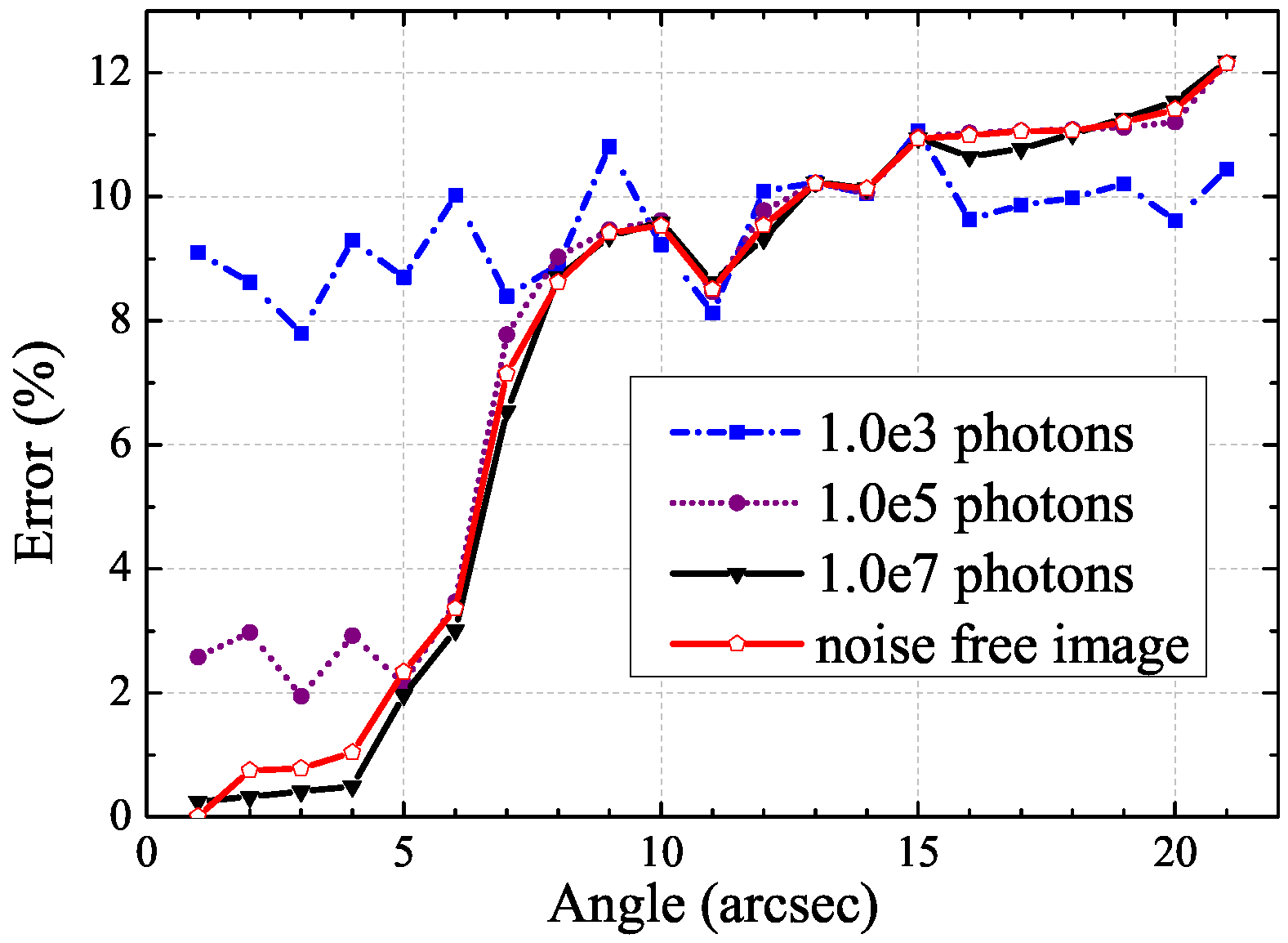
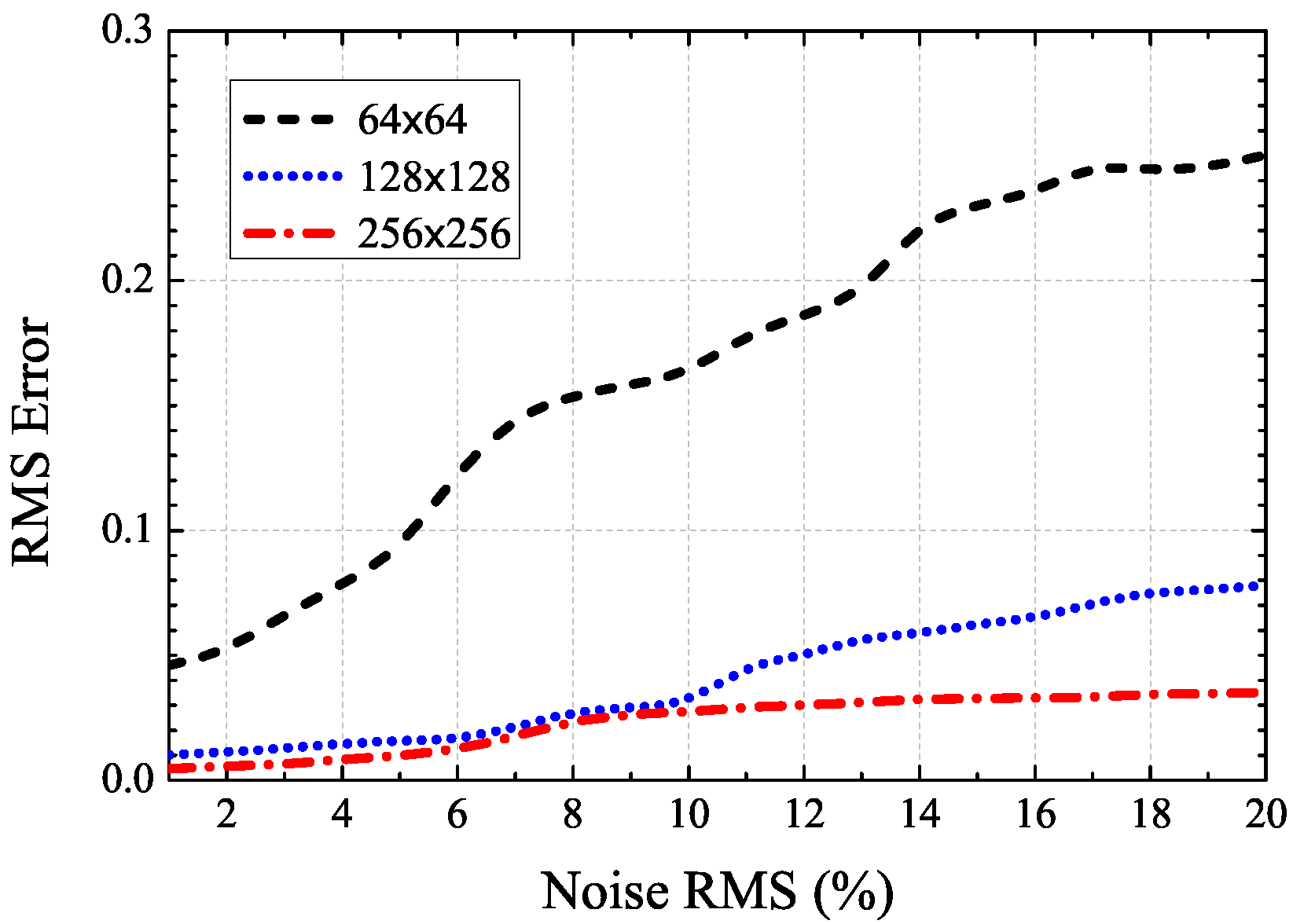
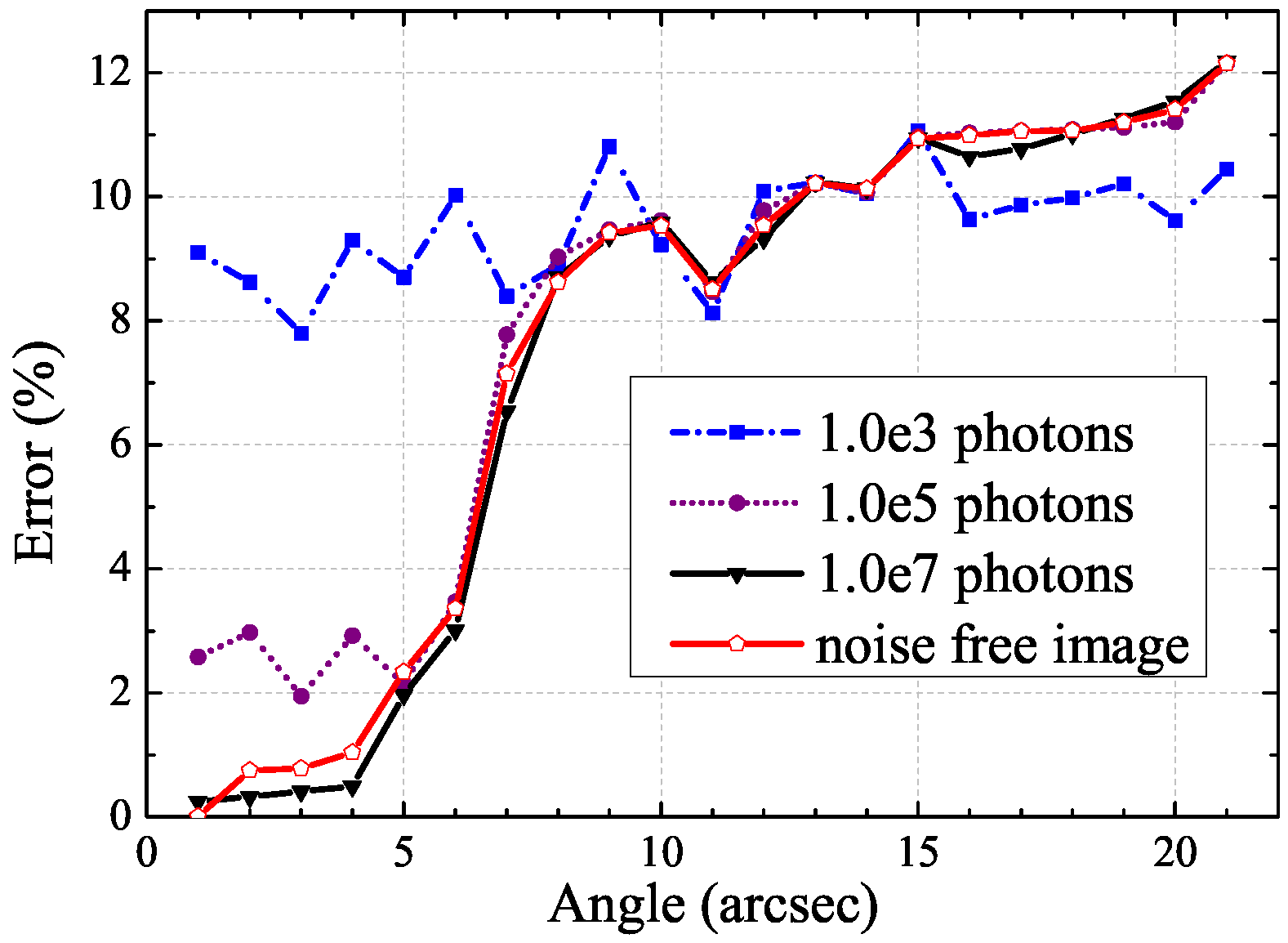
4.3. Sensitivity Analysis
- Noise root mean square (RMS) changes from one percent for the minimum value of the image to 20 percent for the maximum value for the image;
- Fifty noise realizations are calculated for each RMS noise value;
- The simulation is performed on three different sub-images varying in size: a pixels central region of the image, a pixels central region of the image, and the whole pixels image.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhang, L.; Yang, J.; Su, W.; Wang, X.; Jiang, Y.; Jiang, C.; Liu, Z. Research on blind deconvolution algorithm of multiframe turbulence-degraded images. J. Inf. Comput. Sci. 2013, 10, 3625–3634. [Google Scholar] [CrossRef]
- Cheong, H.; Chae, E.; Lee, E.; Jo, G.; Paik, J. Fast image restoration for spatially varying defocus blur of imaging sensor. Sensors 2015, 15, 880–898. [Google Scholar] [CrossRef] [PubMed]
- El-Sallam, A.; Boussaid, F. Spectral-based blind image restoration method for thin TOMBO imagers. Sensors 2008, 8, 6108–6124. [Google Scholar] [CrossRef] [PubMed]
- Christou, J.; Hege, E.; Jefferies, S.; Keller, C. Application of multiframe iterative blind deconvolution for diverse astronomical imaging. Proceedings of SPIE 2200, Amplitude and Intensity Spatial Interferometry II, Kailua Kona, HI, USA, 9 June 1994; pp. 433–444. [Google Scholar]
- Conan, J.; Mugnier, L.; Fusco, T.; Michau, V.; Rousset, G. Myopic deconvolution of adaptive optics images by use of object and point-spread function power spectra. Appl. Opt. 1998, 37, 4614–4622. [Google Scholar] [CrossRef] [PubMed]
- Kundur, D.; Hatzinakos, D. A novel blind deconvolution scheme for image restoration using recursive filtering. IEEE Trans. Signal Process. 1998, 46, 375–390. [Google Scholar] [CrossRef]
- Gerwe, D.; Lee, D.; Barchers, J. Supersampling multiframe blind deconvolution resolution enhancement of adaptive optics compensated imagery of low earth orbit satellites. Opt. Eng. 2002, 41, 2238–2251. [Google Scholar]
- Gallé, R.; Núñez, J.; Gladysz, S. Extended-object reconstruction in adaptive-optics imaging: the multiresolution approach. Astron. Astrophys. 2013, 555, A69. [Google Scholar] [CrossRef]
- Babacan, S.; Molina, R.; Katsaggelos, A. Variational Bayesian blind deconvolution using a total variation prior. IEEE Trans. Image Process. 2009, 18, 12–26. [Google Scholar] [CrossRef] [PubMed]
- Katsaggelos, A.; Lay, K. Maximum likelihood blur identification and image restoration using the EM algorithm. IEEE Trans. Signal Process. 1991, 39, 729–733. [Google Scholar] [CrossRef]
- Zhu, D.; Razaz, M.; Fisher, M. An adaptive algorithm for image restoration using combined penalty functions. Pattern Recognit. Lett. 2006, 27, 1336–1341. [Google Scholar] [CrossRef]
- Zhang, L.; Li, D.; Su, W.; Yang, J.; Jiang, Y. Research on Adaptive Optics Image Restoration Algorithm by Improved Expectation Maximization Method. Abstr. Appl. Anal. 2014, 2014, 781607. [Google Scholar] [CrossRef]
- Yap, K.; Guan, L. Adaptive image restoration based on hierarchical neural networks. Opt. Eng. 2000, 39, 1877–1890. [Google Scholar] [CrossRef]
- DeForest, C.; Martens, P.; Wills-Davey, M. Solar coronal structure and stray light in TRACE. Astrophys. J. 2008, 690, 1264. [Google Scholar] [CrossRef]
- Poduval, B.; DeForest, C.; Schmelz, J.; Pathak, S. Point-spread functions for the extreme-ultraviolet channels of SDO/AIA telescopes. Astrophys. J. 2013, 765, 144. [Google Scholar] [CrossRef]
- González, A.; Delouille, V.; Jacques, L. Non-parametric PSF estimation from celestial transit solar images using blind deconvolution. J. Space Weather Space Clim. 2016, 6, 492–504. [Google Scholar] [CrossRef]
- Li, D.; Zhang, L.; Yang, J.; Su, W. Research on wavelet-based contourlet transform algorithm for adaptive optics image denoising. Opt. Int. J. Light Electron Opt. 2016, 127, 5029–5034. [Google Scholar] [CrossRef]
- Tian, Y.; Rao, C.; Wei, K. Adaptive Optics Image Restoration Based on Frame Selection and Multi-frame Blind Deconvolution. Chin. Astron. Astrophy. 2009, 33, 223–230. [Google Scholar]
- Veran, J.; Rigaut, F.; Maitre, H.; Rouan, D. Estimation of the adaptive optics long-exposure point spread function using control loop data: recent developments. Proceedings of SPIE 3126, Adaptive Optics and Applications, San Diego, CA, USA, 17 October 1997; pp. 3057–3069. [Google Scholar]
- Voitsekhovich, V.; Bara, S. Effect of anisotropic imaging in off-axis adaptive astronomical systems. Astron. Astrophys. Suppl. Ser. 1999, 137, 385–389. [Google Scholar] [CrossRef]
- Fusco, T.; Conan, J.; Mugnier, L.; Michau, V.; Rousset, G. Characterization of adaptive optics point spread function for anisoplanatic imaging: Application to stellar field deconvolution. Astron. Astrophys. Suppl. Ser. 2000, 142, 149–156. [Google Scholar] [CrossRef]
- Chang, X.; Li, R.; Xiong, Y. Predicted space varying point spread function model for anisoplanatic adaptive optics imaging. Acta Opt. Sin. 2011, 12, 003. [Google Scholar] [CrossRef]
- Blanco, L.; Mugnier, L. Marginal blind deconvolution of adaptive optics retinal images. Opt. Express 2011, 19, 23227–23239. [Google Scholar] [CrossRef] [PubMed]
- Prato, M.; Camera, A.; Bonettini, S.; Bertero, M. A convergent blind deconvolution method for post-adaptive optics astronomical imaging. Inverse Prob. 2013, 29, 065017. [Google Scholar] [CrossRef]
- Hong, H.; Zhang, T.; Yu, G. Iterative multi-frame restoration algorithm of turbulence-degraded images based on Poisson model. J. Astronaut. (Chin.) 2004, 25, 649–654. [Google Scholar]
- Sheppard, D.; Hunt, B.; Marcellin, M. Iterative multiframe superresolution algorithms for atmospheric-turbulence-degraded imagery. J. Opt. Soc. Am. A 1998, 15, 978–992. [Google Scholar] [CrossRef]
- Yang, H.; Li, X.; Gong, C.; Jiang, W. Restoration of turbulence-degraded extended object using the stochastic parallel gradient descent algorithm: Numerical simulation. Opt. Express 2009, 17, 3052–3062. [Google Scholar] [CrossRef] [PubMed]
- Gabarda, S.; Cristóbal, G. Blind image quality assessment through anisotropy. J. Opt. Soc. Am. A 2007, 24, B42–B51. [Google Scholar] [CrossRef]
- Chen, B.; Cheng, C.; Guo, S.; Pu, G.; Geng, Z. Unsymmetrical multi-limit iterative blind deconvolution algorithm for adaptive optics image restoration. High Power Laser Part. Beams (Chin.) 2011, 2, 313–318. [Google Scholar] [CrossRef]
- Pixabay. Available online: https://pixabay.com/en/ (accessed on 3 November 2016).
- Figueiro, T.; Saib, M.; Tortai, J.; Schiavone, P. PSF calibration patterns selection based on sensitivity analysis. Microelectron. Eng. 2013, 112, 282–286. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Parameter Value | Remarks |
|---|---|---|
| 13 cm | Atmospheric coherence length | |
| 0.72 m | Central wavelength | |
| f | 20 m | Imaging focal length |
| D | 1.03 m | Telescope aperture |
| The size for imaging CCD | 320 × 240 pixel | |
| Size of pixel in CCD | 6.7 m | |
| Imaging observation range | 0.7−0.9 m | |
| Field of view for imaging system |
| ML-EM | CPF-Adaptive | RT-IEM | VBBD-TV | Our Algorithm | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Image Names | Running Time (s) | Running Time (s) | Running Time (s) | Running Time (s) | Running Time (s) | ||||||||||
| House | 0.0034 | 0.0025 | 13.27 | 0.0030 | 13.96 | 0.0023 | 13.87 | 13.90 | |||||||
| Chemical Plant | 0.0069 | 0.0072 | 12.89 | 0.0054 | 13.04 | 0.0051 | 13.12 | 13.21 | |||||||
| The Little Girl | 0.0046 | 0.0039 | 10.54 | 0.0028 | 10.91 | 0.0021 | 10.87 | 11.08 | |||||||
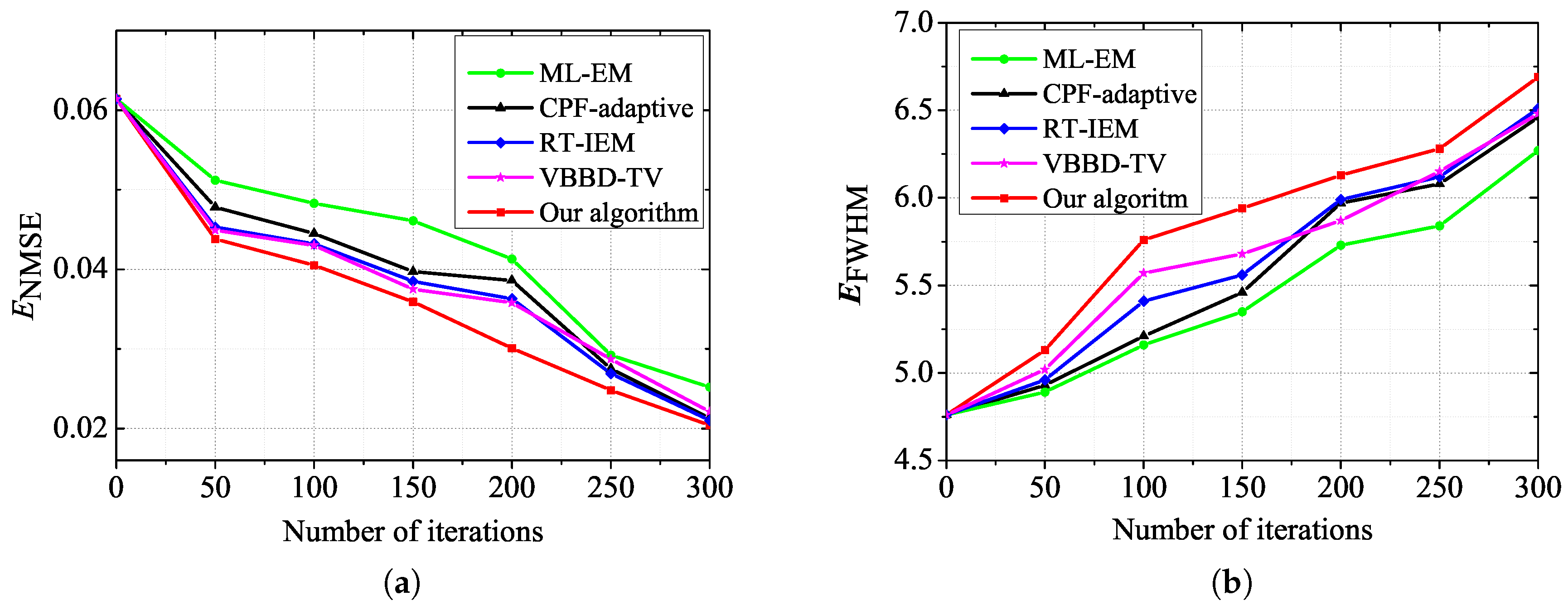
| Algorithms | (pixel) | Computation Time (s) | |
|---|---|---|---|
| ML-EM | 0.0252 | 6.27 | 9.872 |
| CPF-adaptive | 0.0213 | 6.46 | 12.196 |
| RT-IEM | 0.0210 | 6.51 | 10.983 |
| VBBD-TV | 0.0221 | 6.48 | 8.624 |
| Our algorithm | 0.0204 | 6.69 | 12.257 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, D.; Sun, C.; Yang, J.; Liu, H.; Peng, J.; Zhang, L. Robust Multi-Frame Adaptive Optics Image Restoration Algorithm Using Maximum Likelihood Estimation with Poisson Statistics. Sensors 2017, 17, 785. https://doi.org/10.3390/s17040785
Li D, Sun C, Yang J, Liu H, Peng J, Zhang L. Robust Multi-Frame Adaptive Optics Image Restoration Algorithm Using Maximum Likelihood Estimation with Poisson Statistics. Sensors. 2017; 17(4):785. https://doi.org/10.3390/s17040785
Chicago/Turabian StyleLi, Dongming, Changming Sun, Jinhua Yang, Huan Liu, Jiaqi Peng, and Lijuan Zhang. 2017. "Robust Multi-Frame Adaptive Optics Image Restoration Algorithm Using Maximum Likelihood Estimation with Poisson Statistics" Sensors 17, no. 4: 785. https://doi.org/10.3390/s17040785
APA StyleLi, D., Sun, C., Yang, J., Liu, H., Peng, J., & Zhang, L. (2017). Robust Multi-Frame Adaptive Optics Image Restoration Algorithm Using Maximum Likelihood Estimation with Poisson Statistics. Sensors, 17(4), 785. https://doi.org/10.3390/s17040785