Location Accuracy of INS/Gravity-Integrated Navigation System on the Basis of Ocean Experiment and Simulation


Abstract
:1. Introduction
2. Principles of IGNS and Variation Characteristics of Gravity Anomaly
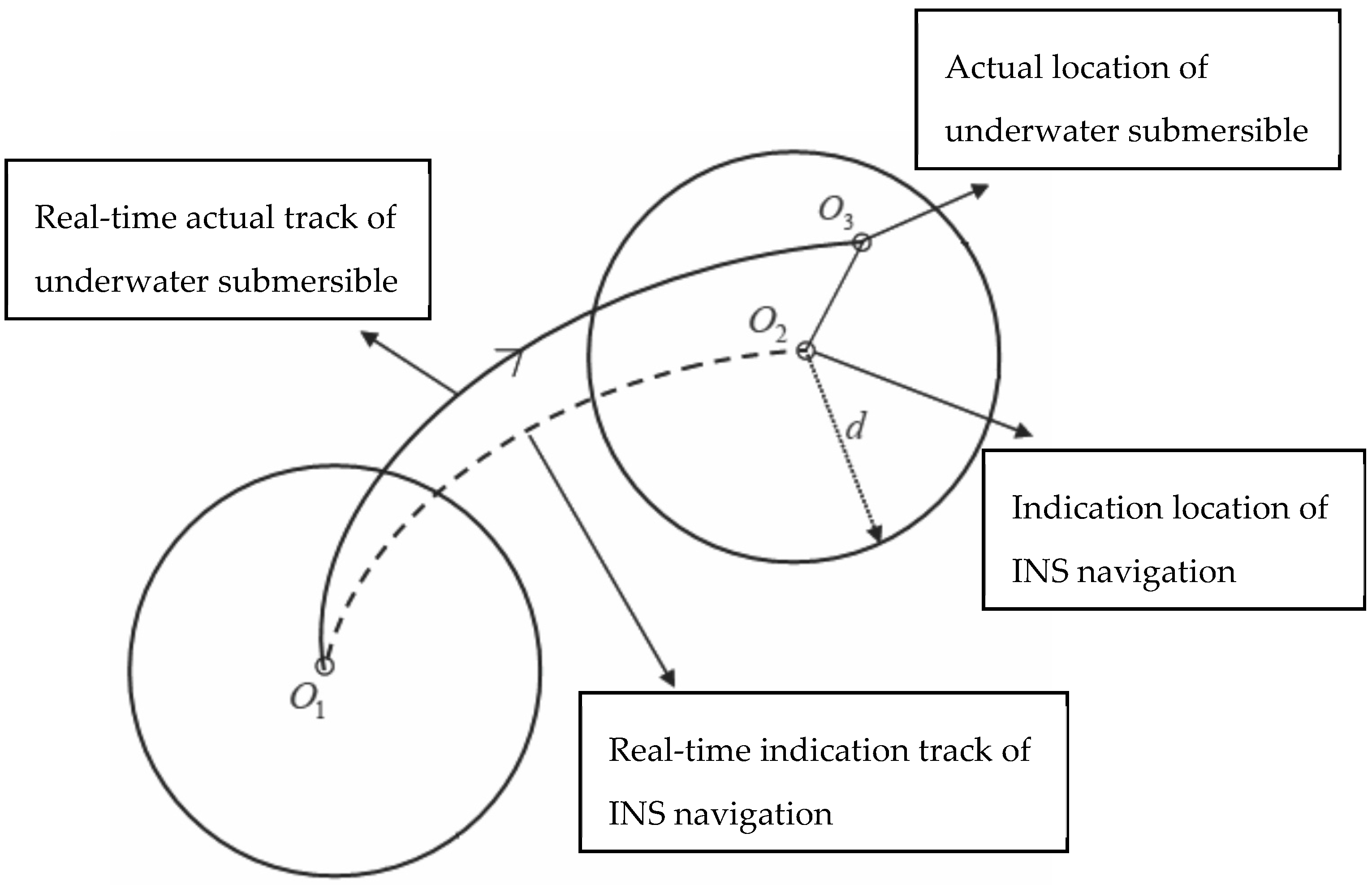
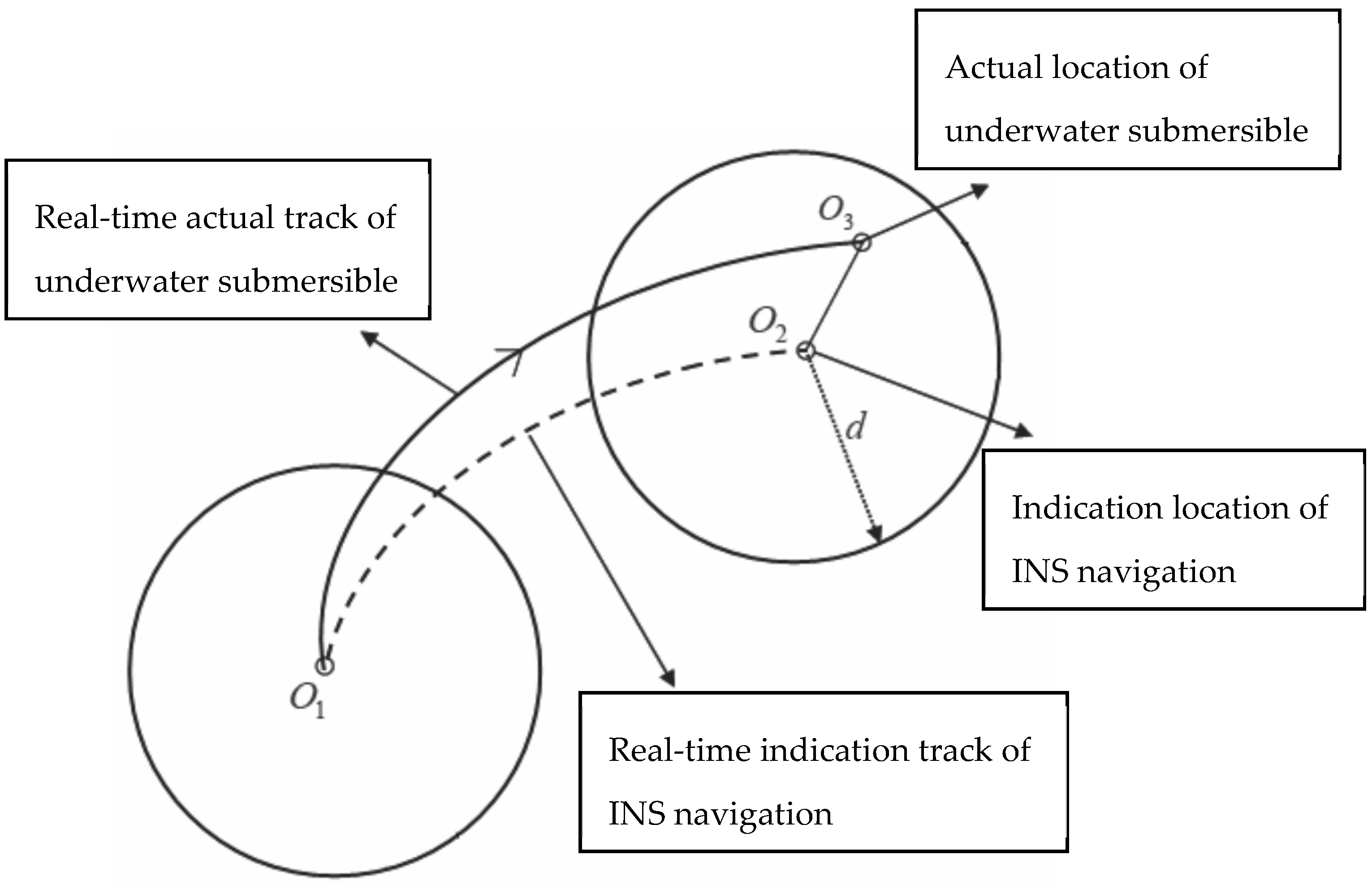
2.1. Principles of IGNS
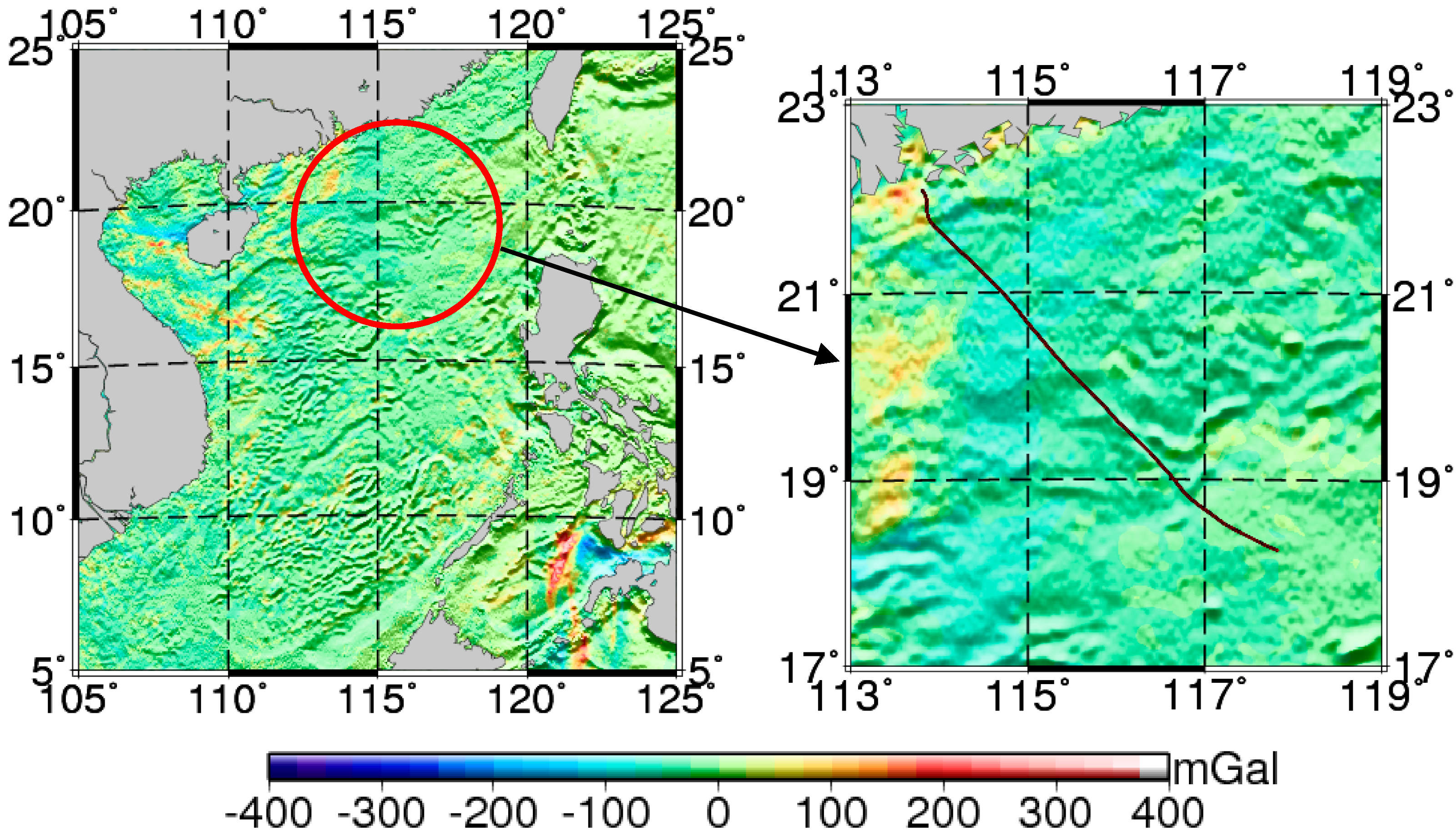
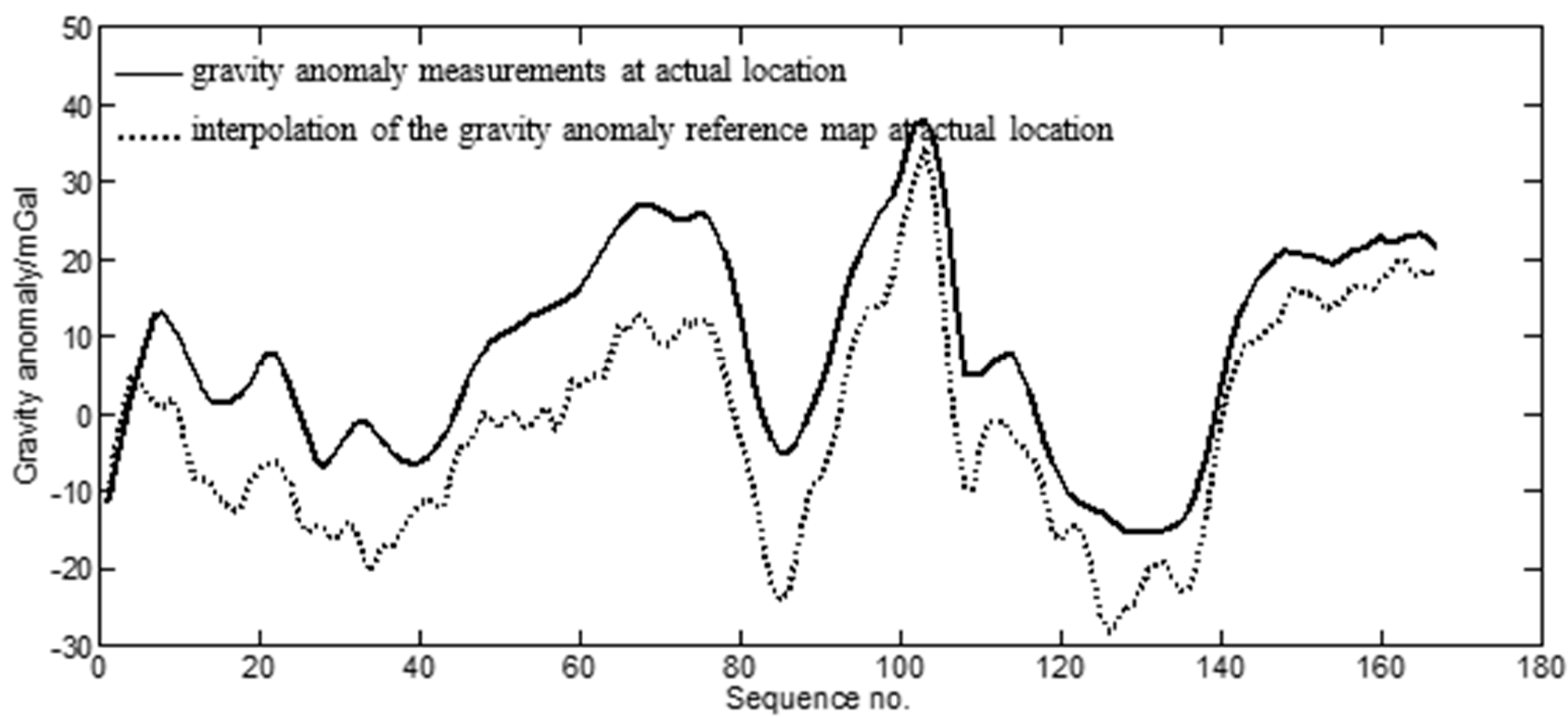
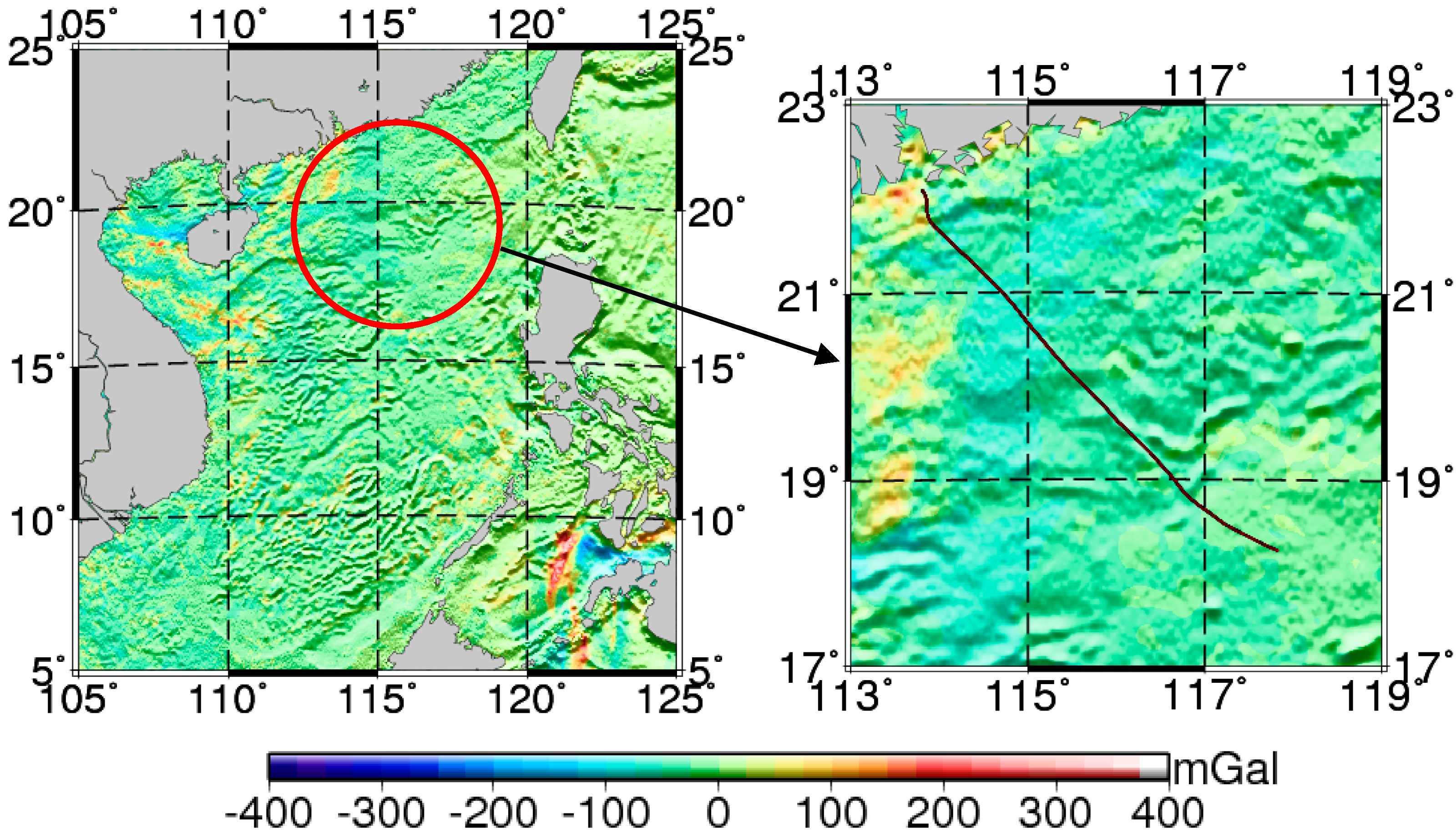
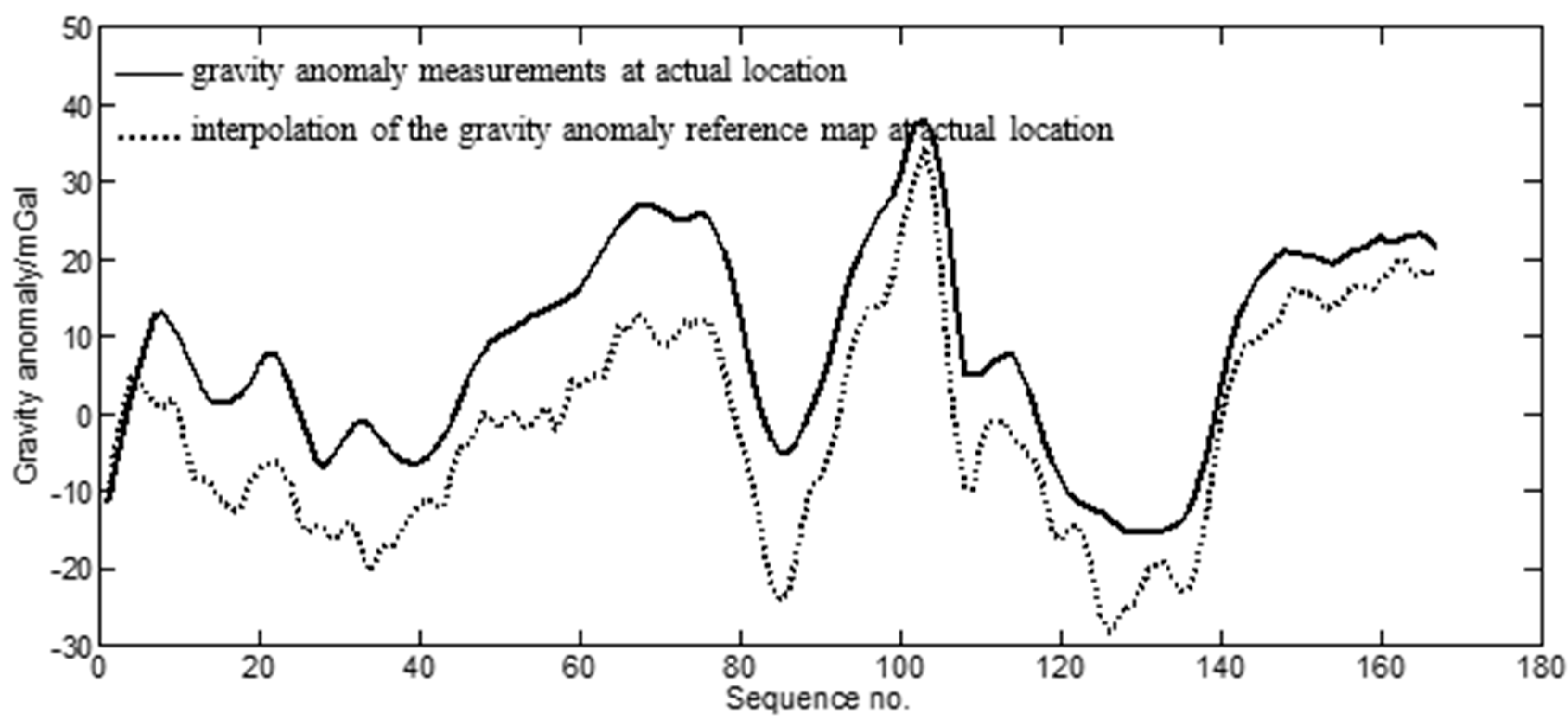
2.2. Variation Characteristics of Gravity Anomaly along the Route
3. Results of Matching Location on the Basis of Ocean Experiment and Simulation
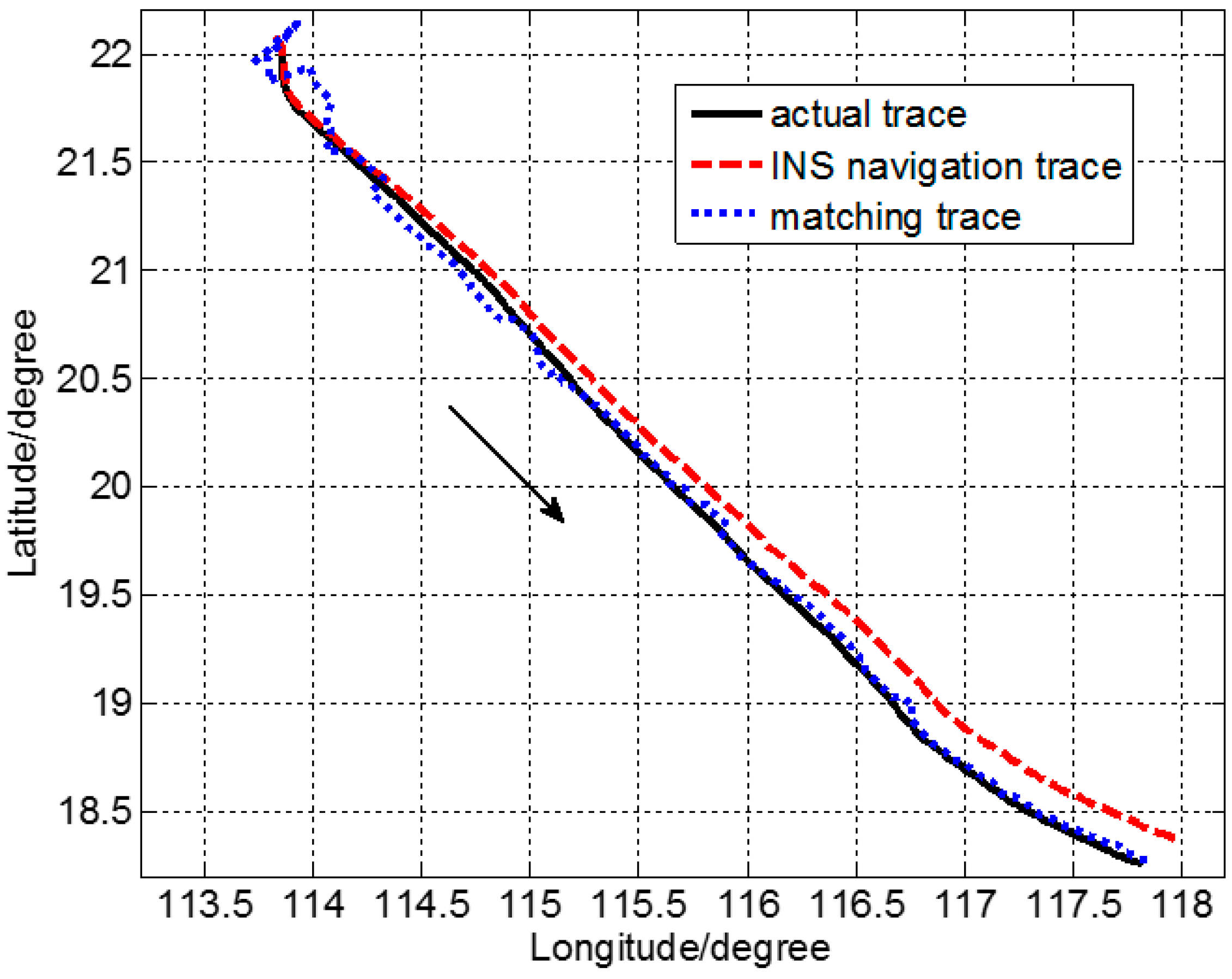
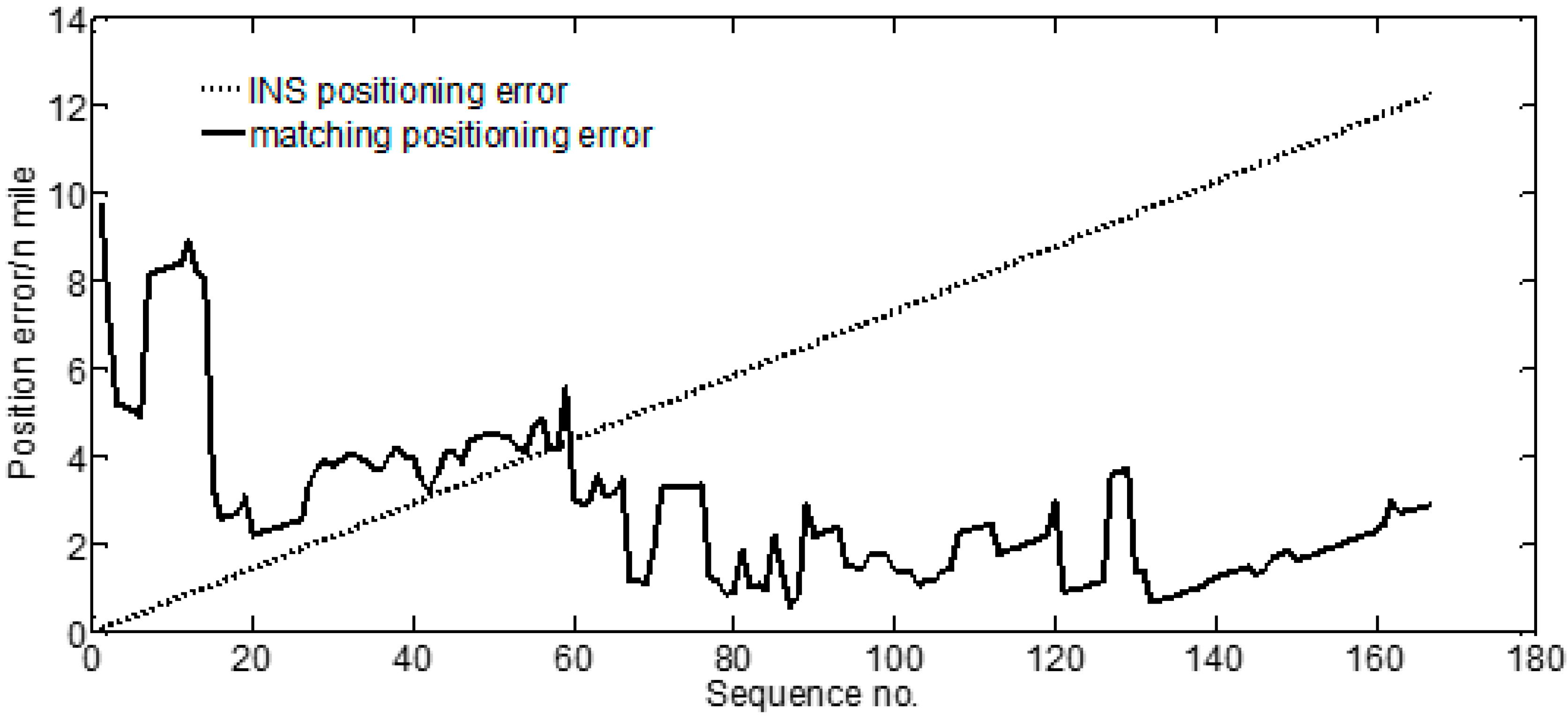
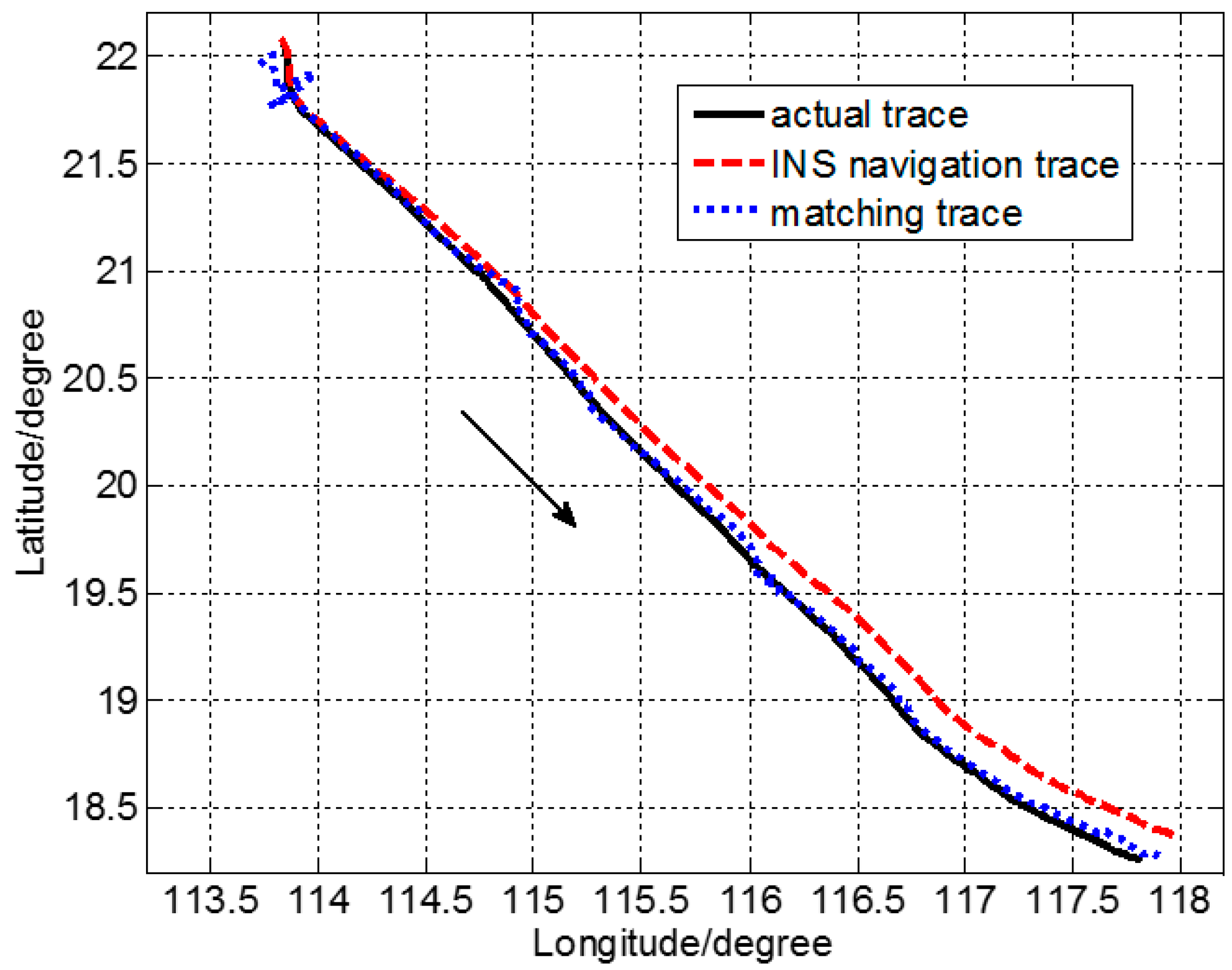
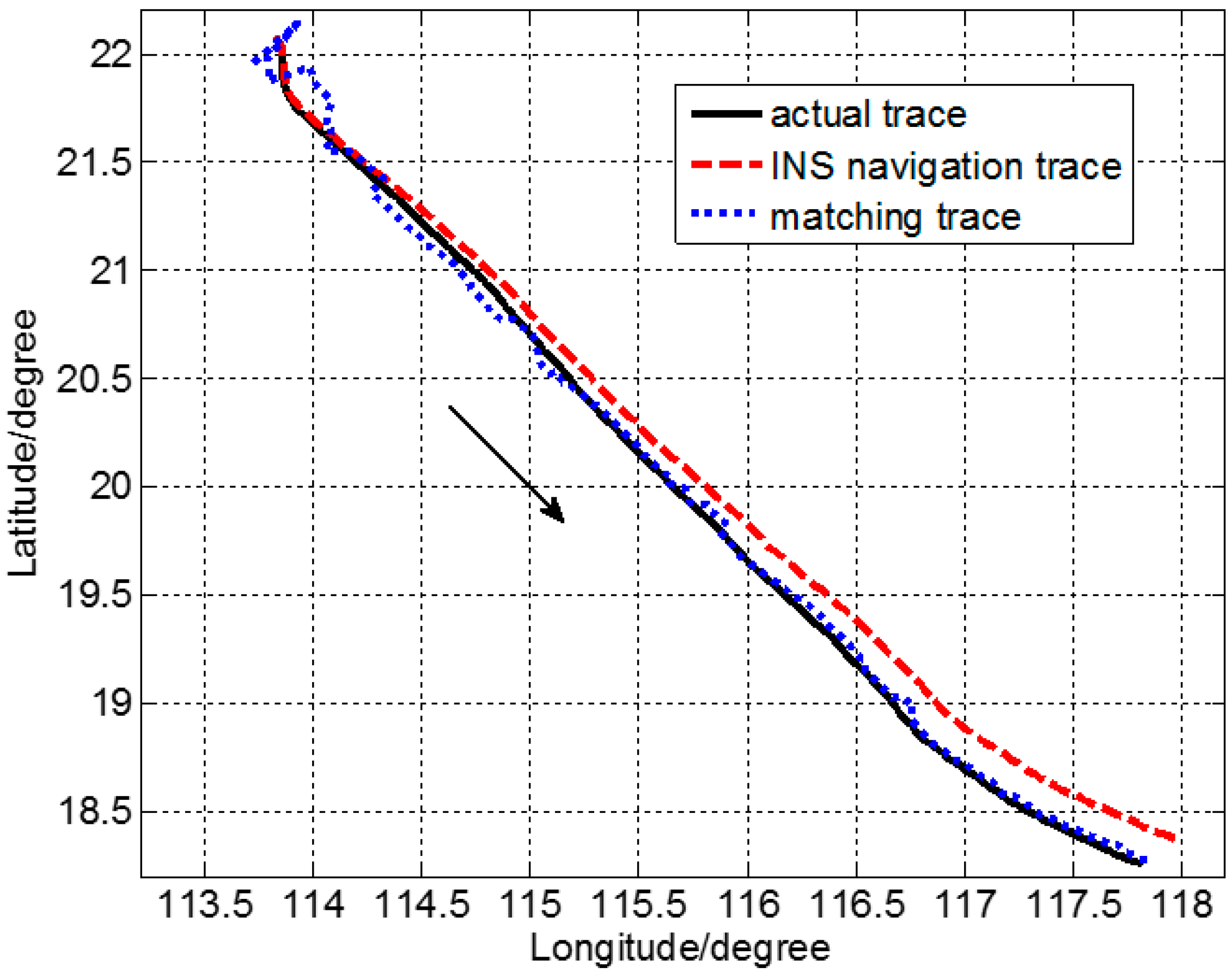
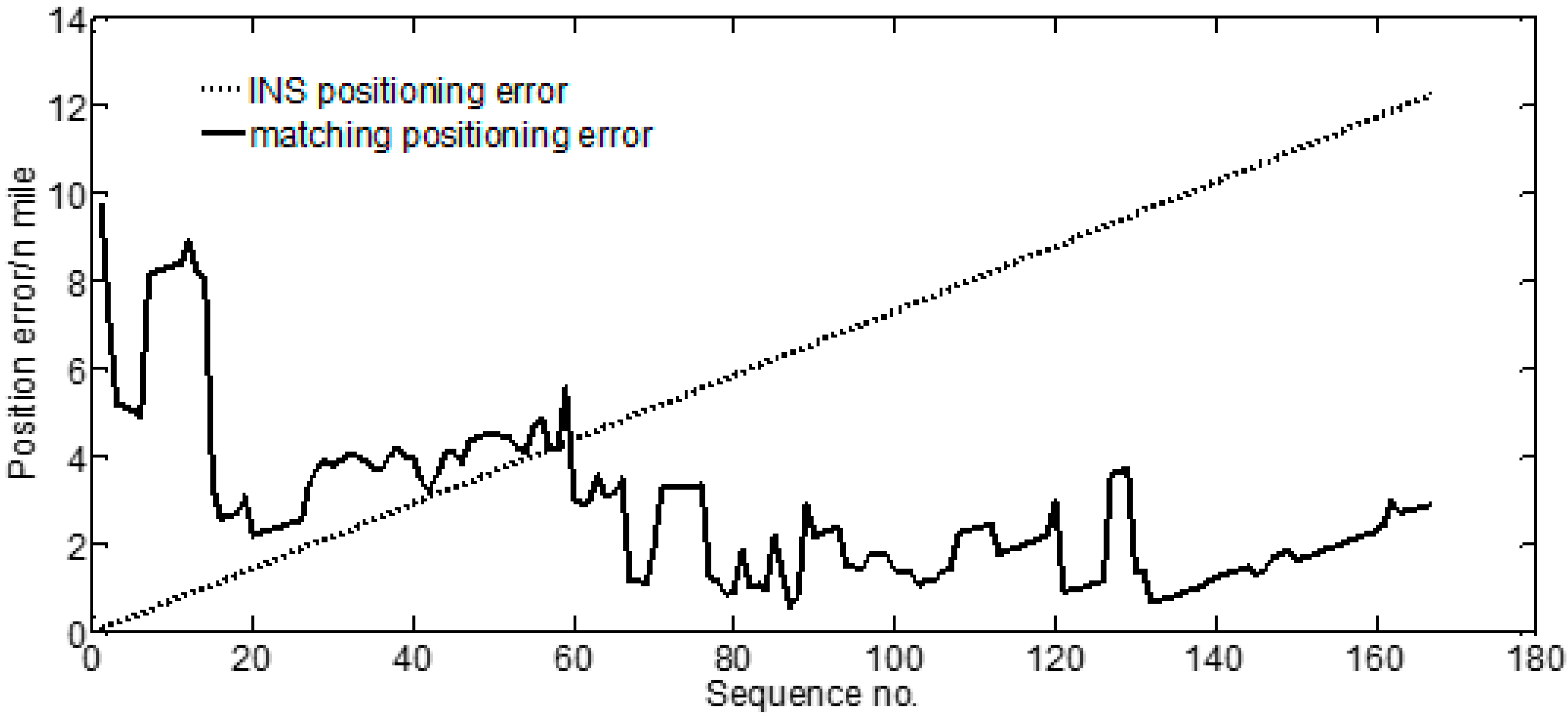
3.1. Results of Matching Location with Ocean Experiment
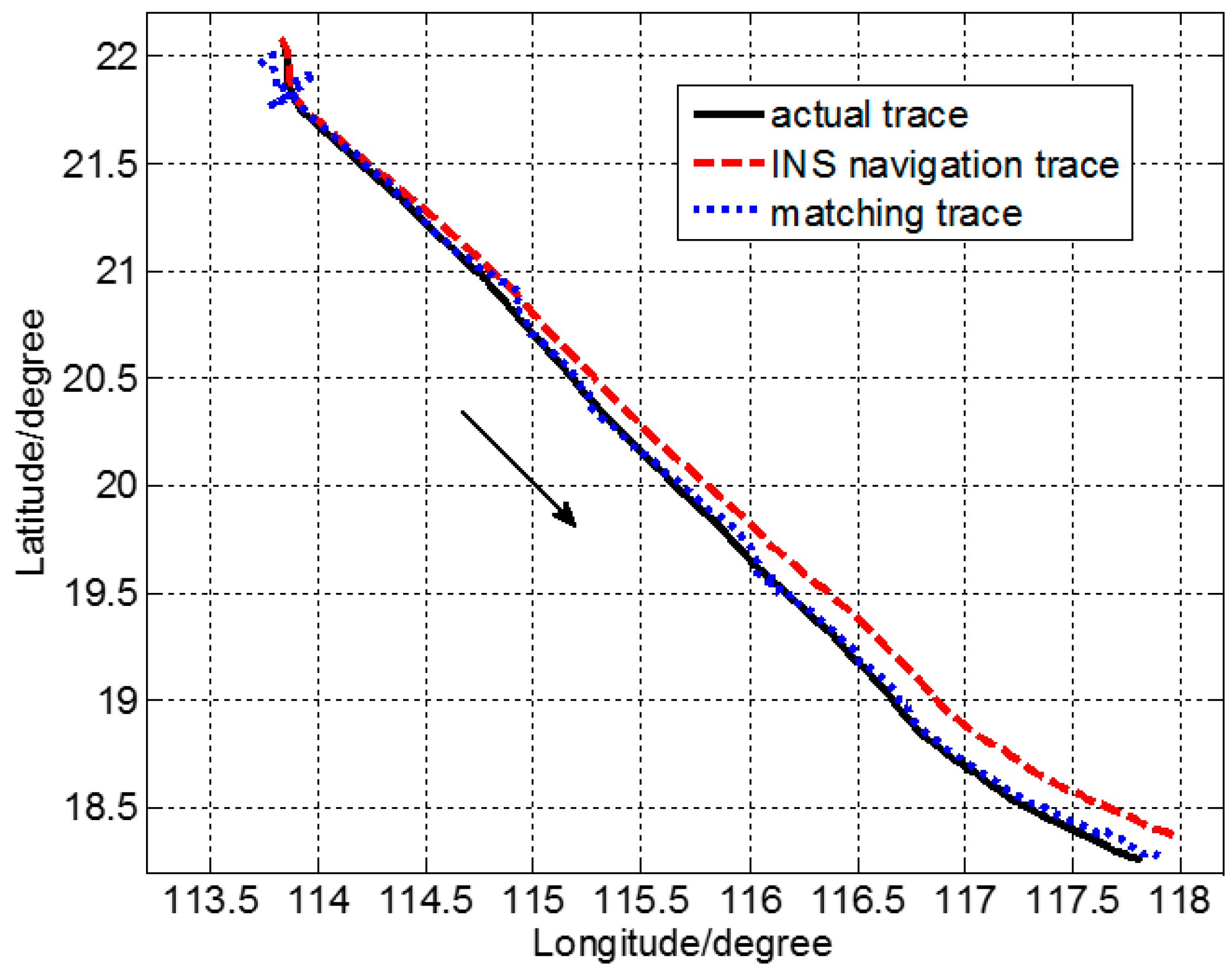
3.2. Results of Matching Location with Simulation
4. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hays, K.; Schmidt, R.; Wilson, W.; Campbell, J.A. Submarine Navigator for the 21st Century. In Proceedings of the IEEE Position Location and Navigation Symposium, Palms Springs, CA, USA, 15–18 April 2002; pp. 179–188. [Google Scholar]
- Miller, P.; Farrell, J.; Zhao, Y.; Djapic, V. Autonomous Underwater Vehicle Navigation. IEEE J. Ocean. Eng. 2010, 35, 663–678. [Google Scholar] [CrossRef]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV navigation and localization: A review. IEEE J. Ocean. Eng. 2014, 39, 131–149. [Google Scholar] [CrossRef]
- Tan, H.; Diamant, R.; Seah, W.K.G.; Waldmeyer, M. A survey of techniques and challenges in underwater localization. Ocean Eng. 2011, 38, 1663–1676. [Google Scholar] [CrossRef]
- Deng, Z.; Ge, Y.; Guan, W.; Han, K. Underwater map-matching aided inertial navigation system based on multi-geophysical information. Front. Electr. Electron. Eng. China 2010, 5, 496–500. [Google Scholar] [CrossRef]
- Boyer, F.; Lebastard, V.; Chevallereau, C.; Mintchev, S.; Stefanini, C. Underwater navigation based on passive electric sense: New perspectives for underwater docking. Int. J. Robot. Res. 2015, 34, 1228–1250. [Google Scholar] [CrossRef]
- Ren, H.; Kazanzides, P. Investigation of attitude tracking using an integrated inertial and magnetic navigation system for hand-held surgical instruments. IEEE/ASME Trans. Mechatron. 2012, 17, 210–217. [Google Scholar] [CrossRef]
- Wang, F.; Wen, X.; Sheng, D. Observability Analysis and Simulation of Passive Gravity Navigation System. JCP 2013, 8, 248–255. [Google Scholar] [CrossRef]
- Moryl, J.; Rice, H.; Shinners, S. The Universal Gravity Module for Enhanced Submarine Navigation. In Proceedings of the IEEE Position Location and Navigation Symposium 1998, Palm Springs, CA, USA, 20–23 April 1998; pp. 324–331. [Google Scholar]
- Rice, H.; Kelmenson, S.; Mendelsohn, L. Geophysical Navigation Technologies and Applications. In Proceedings of the IEEE/ION Position Location and Navigation Symposium 2004, Monterey, CA, USA, 26–29 April 2004; pp. 618–624. [Google Scholar]
- Tong, Y.; Bian, S.; Jiang, D.; Xiang, C. A new integrated gravity matching algorithm based on approximated local gravity map. Chin. J. Geophys. 2012, 55, 2917–2924. [Google Scholar]
- Xu, Z.; Yan, L.; Ning, S.; Zou, H. Situation and development of marine gravity aided navigation system. Prog. Geophys. 2007, 22, 104–111. [Google Scholar]
- Lee, J.; Kwon, J.H.; Yu, M. Performance Evaluation and Requirements Assessment for Gravity Gradient Referenced Navigation. Sensors 2015, 15, 16833–16847. [Google Scholar] [CrossRef] [PubMed]
- Masiero, A.; Vettore, A. Improved Feature Matching for Mobile Devices with IMU. Sensors 2016, 16, 1243. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Wang, Y.; Fang, J.; Chai, H.; Zheng, H. Simulation research on a minimum root-mean-square error rotation-fitting algorithm for gravity matching navigation. Sci. China Earth Sci. 2012, 55, 90–97. [Google Scholar] [CrossRef]
- Zheng, H.; Wang, H.; Wu, L.; Cai, H.; Wang, Y. Simulation research on gravity-geomagnetism combined aided underwater navigation. J. Navig. 2013, 66, 83–98. [Google Scholar] [CrossRef]
- Tong, Y.; Bian, S.; Jiang, D.; Xiang, C. Gravity matching aided navigation based on local continuous field. J. Chin. Inert. Technol. 2011, 19, 681–685. [Google Scholar]
- Yoo, Y.M.; Lee, W.H.; Lee, S.M.; Park, C.G.; Kwon, J.H. Improvement of TERCOM aided inertial navigation system by velocity correction. In Proceedings of the IEEE/ION Position Location and Navigation Symposium 2012, Myrtle Beach, SC, USA, 23–26 April 2012; pp. 1082–1087. [Google Scholar]
- Han, Y.; Wang, B.; Deng, Z.; Fu, M. An Improved TERCOM-Based Algorithm for Gravity-Aided Navigation. IEEE Sens. J. 2016, 16, 2537–2544. [Google Scholar] [CrossRef]
- Wu, L.; Wang, H.; Hsu, H.; Chai, H.; Wang, Y. Research on the Relative Positions-Constrained Pattern Matching Method for Underwater Gravity-Aided Inertial Navigation. J. Navig. 2015, 68, 937–950. [Google Scholar] [CrossRef]
- Allotta, B.; Caiti, A.; Costanzi, R.; Fanelli, F.; Fenucci, D. A new AUV navigation system exploiting unscented Kalman filter. Ocean Eng. 2016, 113, 121–132. [Google Scholar] [CrossRef]
- Yuan, G.; Zhang, H.; Yuan, K.; Zhu, L. Improved SITAN algorithm in the application of aided inertial navigation. In Proceedings of the 2012 International Conference on Measurement, Information and Control (MIC), Harbin, China, 18–20 May 2012; IEEE: Piscataway, NJ, USA, 2012; Volume 2, pp. 922–926. [Google Scholar]
- Donovan, G. Position error correction for an autonomous underwater vehicle inertial navigation system (INS) using a particle filter. IEEE J. Ocean. Eng. 2012, 37, 431–445. [Google Scholar] [CrossRef]
- Gao, W.; Zhao, B.; Zhou, G.; Wang, Q.; Yu, C. Improved artificial bee colony algorithm based gravity matching navigation method. Sensors 2014, 14, 12968–12989. [Google Scholar] [CrossRef] [PubMed]
- Wang, B.; Yu, L.; Deng, Z.; Fu, M. A particle filter-based matching algorithm with gravity sample vector for underwater gravity aided navigation. IEEE/ASME Trans. Mechatron. 2016, 21, 1399–1408. [Google Scholar] [CrossRef]
- Wu, L.; Ma, J.; Tian, J. A self-adaptive unscented Kalman filtering for underwater gravity aided navigation. In Proceedings of the Position Location and Navigation Symposium (PLANS), Indian Wells, CA, USA, 4–6 May 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 142–145. [Google Scholar]
- Liu, F.; Li, Y.; Zhang, Y.; Hou, H. Application of Kalman Filter algorithm in gravity-aided navigation system. In Proceedings of the 2011 International Conference on Mechatronics and Automation (ICMA), Beijing, China, 7–10 August 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 2322–2326. [Google Scholar]
- Hollowell, J. Heli/SITAN: A terrain referenced navigation algorithm for helicopters. In Proceedings of the Position Location and Navigation Symposium, 1990. Record. The 1990’s-A Decade of Excellence in the Navigation Sciences, IEEE PLANS’90, Las Vegas, NV, USA, 20–20 March 1990; pp. 616–625. [Google Scholar]
- Li, K.; Xiong, L.; Cheng, L.; Ma, J. The Research of Matching Area Selection Criterion for Gravity Gradient Aided Navigation. In Proceedings of the Chinese Conference on Pattern Recognition, Changsha, China, 17–19 November 2014; Springer: Berlin/Heidelberg, Germany, 2014; pp. 21–30. [Google Scholar]
- Wu, T.; Ou, Y.; Lu, X.; Huang, M.; Ma, F. Analysis on effecting mode of several essential factors to gravity aided navigation. J. Chin. Inert. Technol. 2011, 19, 559–564. [Google Scholar]
- Sandwell, D.T.; Müller, R.D.; Smith, W.H.F.; Garcia, E.; Francis, R. New global marine gravity model from CryoSat-2 and Jason-1 reveals buried tectonic structure. Science 2014, 346, 65–67. [Google Scholar] [CrossRef] [PubMed]
- Kong, M.; Tian, X.; Liu, J.; Kong, S. Accuracy analysis of marine gravity data shared internationally. Sci. Surv. Mapp. 2016, 41, 14–18. [Google Scholar]
- Kovrizhnykh, P.; Shagirov, B.; Yurist, S. Marine Gravity Survey at the Caspian with GT-2M, Chekan AM and L&R Gravimeters: Comparison of Accuracy; Gravimetric Technologies, Moscow State University: Moskva, Russia, 2011. [Google Scholar]
- Wang, B.; Zhu, Y.; Deng, Z.; Fu, M. The Gravity Matching Area Selection Criteria for Underwater Gravity-Aided Navigation Application Based on the Comprehensive Characteristic Parameter. IEEE/ASME Trans. Mechatron. 2016, 21, 2935–2943. [Google Scholar] [CrossRef]
- Zhou, X.; Li, S.; Yang, J.; Zhang, L. Selective criteria of characteristic area on geomagnetic map. J. Chin. Inert. Technol. 2008, 16, 694–698. [Google Scholar]
- Allotta, B.; Caiti, A.; Chisci, L.; Costanzi, R.; Di Corato, F.; Fantacci, C.; Fenucci, D.; Meli, E.; Ridolfi, A. An unscented Kalman filter based navigation algorithm for autonomous underwater vehicles. Mechatronics 2016, 39, 185–195. [Google Scholar] [CrossRef]
- Krishnamurthy, P.; Khorrami, F. A self-aligning underwater navigation system based on fusion of multiple sensors including DVL and IMU. In Proceedings of the 2013 9th Asian Control Conference (ASCC), Istanbul, Turkey, 23–26 June 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–6. [Google Scholar]
- Morgado, M.; Batista, P.; Oliveira, P.; Silvestre, C. Position USBL/DVL sensor-based navigation filter in the presence of unknown ocean currents. Automatica 2011, 47, 2604–2614. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Min. | Max. | Mean | Dispersion |
|---|---|---|---|
| −15.40 | 38.14 | 8.50 | 13.30 |
| Min. | Max. | Mean | STD | Degree of Fit |
|---|---|---|---|---|
| −1.28 | 19.77 | 10.31 | 4.32 | 11.18 |
| Min. | Max. | Mean | STD | RMS |
|---|---|---|---|---|
| 0.58 | 9.75 | 2.49 | 1.33 | 2.83 |
| Simulation of Noise Conditions | Mean | STD | RMS |
|---|---|---|---|
| , | 1.05 | 0.59 | 1.20 |
| , | 1.57 | 0.84 | 1.78 |
| , | 1.89 | 1.30 | 2.30 |
| , | 2.18 | 2.04 | 2.99 |
| , | 3.13 | 2.49 | 4.01 |
| Simulation of Noise Conditions | Mean | STD | RMS |
|---|---|---|---|
| , | 1.89 | 1.30 | 2.30 |
| , | 1.88 | 1.24 | 2.25 |
| , | 1.57 | 1.29 | 2.03 |
| , | 1.62 | 1.26 | 2.05 |
| , | 2.01 | 1.60 | 2.58 |
| Simulation of Noise Conditions | Mean | STD | RMS |
|---|---|---|---|
| , | 2.21 | 1.96 | 2.96 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Wu, L.; Chai, H.; Bao, L.; Wang, Y. Location Accuracy of INS/Gravity-Integrated Navigation System on the Basis of Ocean Experiment and Simulation. Sensors 2017, 17, 2961. https://doi.org/10.3390/s17122961
Wang H, Wu L, Chai H, Bao L, Wang Y. Location Accuracy of INS/Gravity-Integrated Navigation System on the Basis of Ocean Experiment and Simulation. Sensors. 2017; 17(12):2961. https://doi.org/10.3390/s17122961
Chicago/Turabian StyleWang, Hubiao, Lin Wu, Hua Chai, Lifeng Bao, and Yong Wang. 2017. "Location Accuracy of INS/Gravity-Integrated Navigation System on the Basis of Ocean Experiment and Simulation" Sensors 17, no. 12: 2961. https://doi.org/10.3390/s17122961
APA StyleWang, H., Wu, L., Chai, H., Bao, L., & Wang, Y. (2017). Location Accuracy of INS/Gravity-Integrated Navigation System on the Basis of Ocean Experiment and Simulation. Sensors, 17(12), 2961. https://doi.org/10.3390/s17122961