Vision-Based Target Finding and Inspection of a Ground Target Using a Multirotor UAV System

Abstract
1. Introduction
2. Related Work
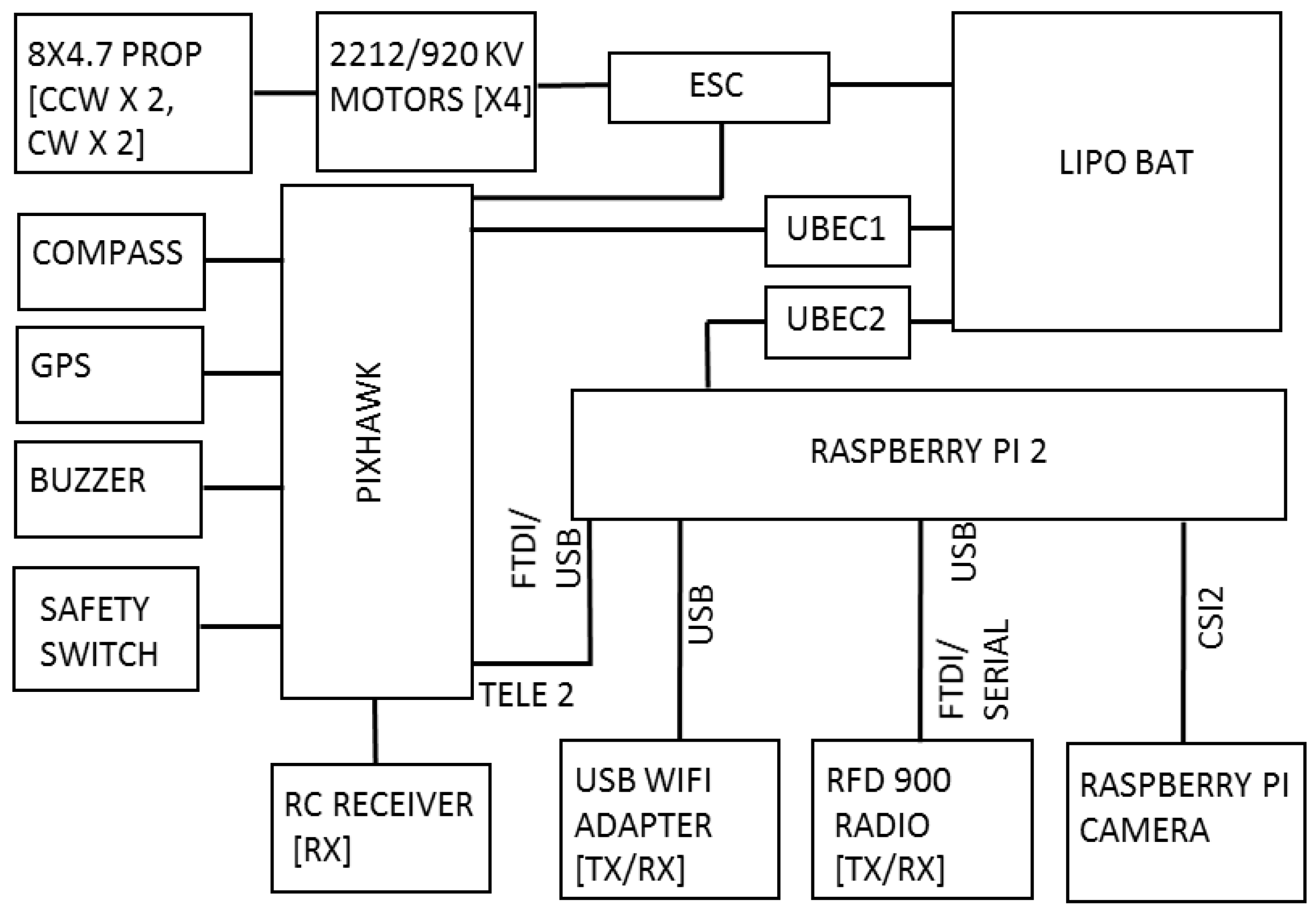
3. Hardware System
4. Software System
4.1. Conversion of 2D Image Coordinates to World Coordinates
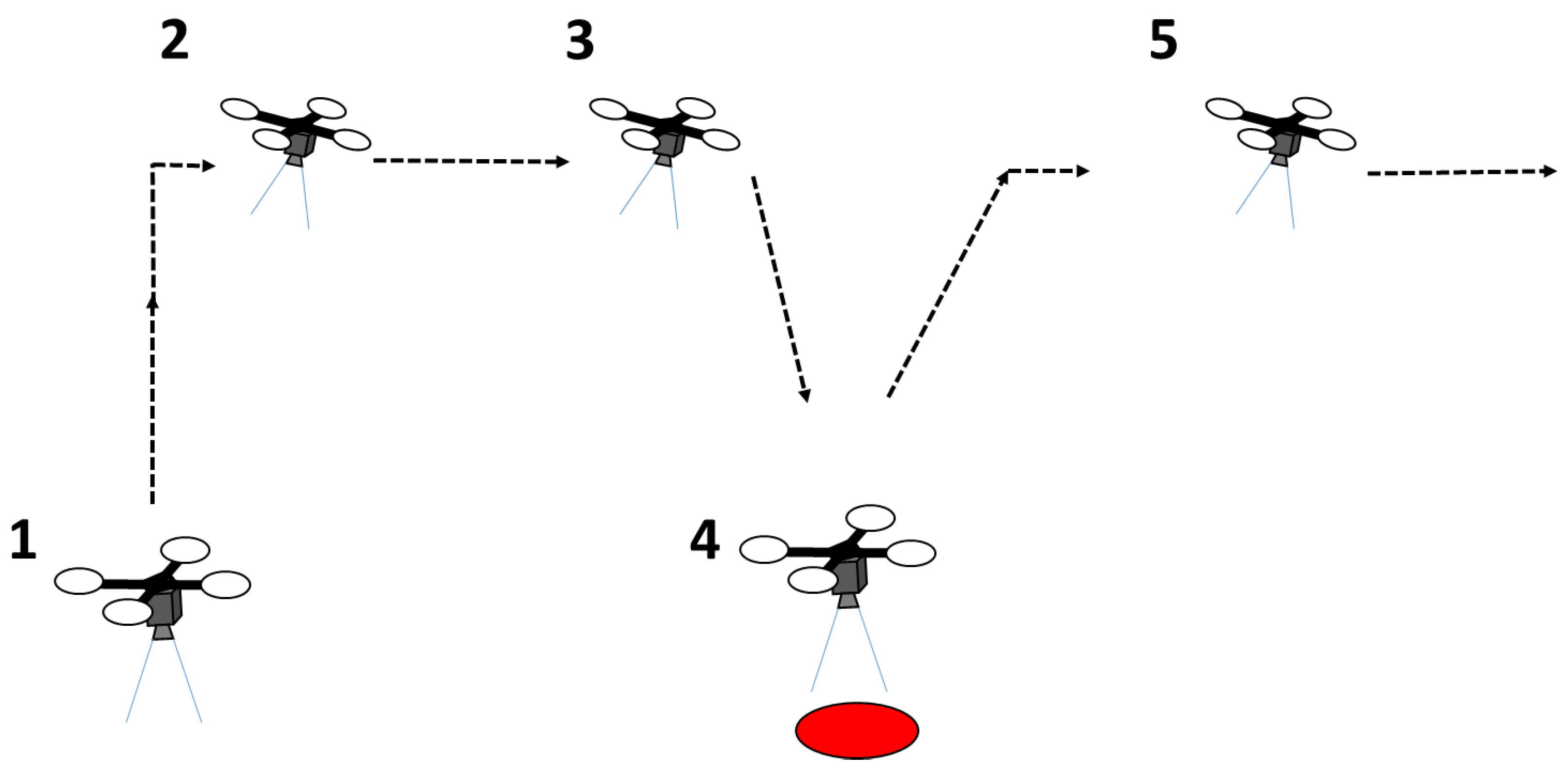
4.2. Navigation Algorithm
| Algorithm 1 Navigation Algorithm |
  |
4.3. Target Detection Algorithm
| Algorithm 2 Target Detection Algorithm | |
| 1. | for each image Imi |
| 2. | u=v=−1 |
| 3. | Imi=preprocess(Imi) |
| 4. | binaryImg= threshold (Imi, colorRange) |
| 5. | binaryImg=postProcessing(binaryImg) |
| 6. | [u,v]=findHoughCircleCenter(binaryImg) |
| 7. | if(u<1 OR v<1) |
| 8. | if(moment00(binaryImg)>0) |
| 9. | [u,v]=findCentroidOfBlob(binaryImg) |
| 10. | end if |
| 11. | end if |
| 12. | end for |
5. Experiments
5.1. Experimental Scenario
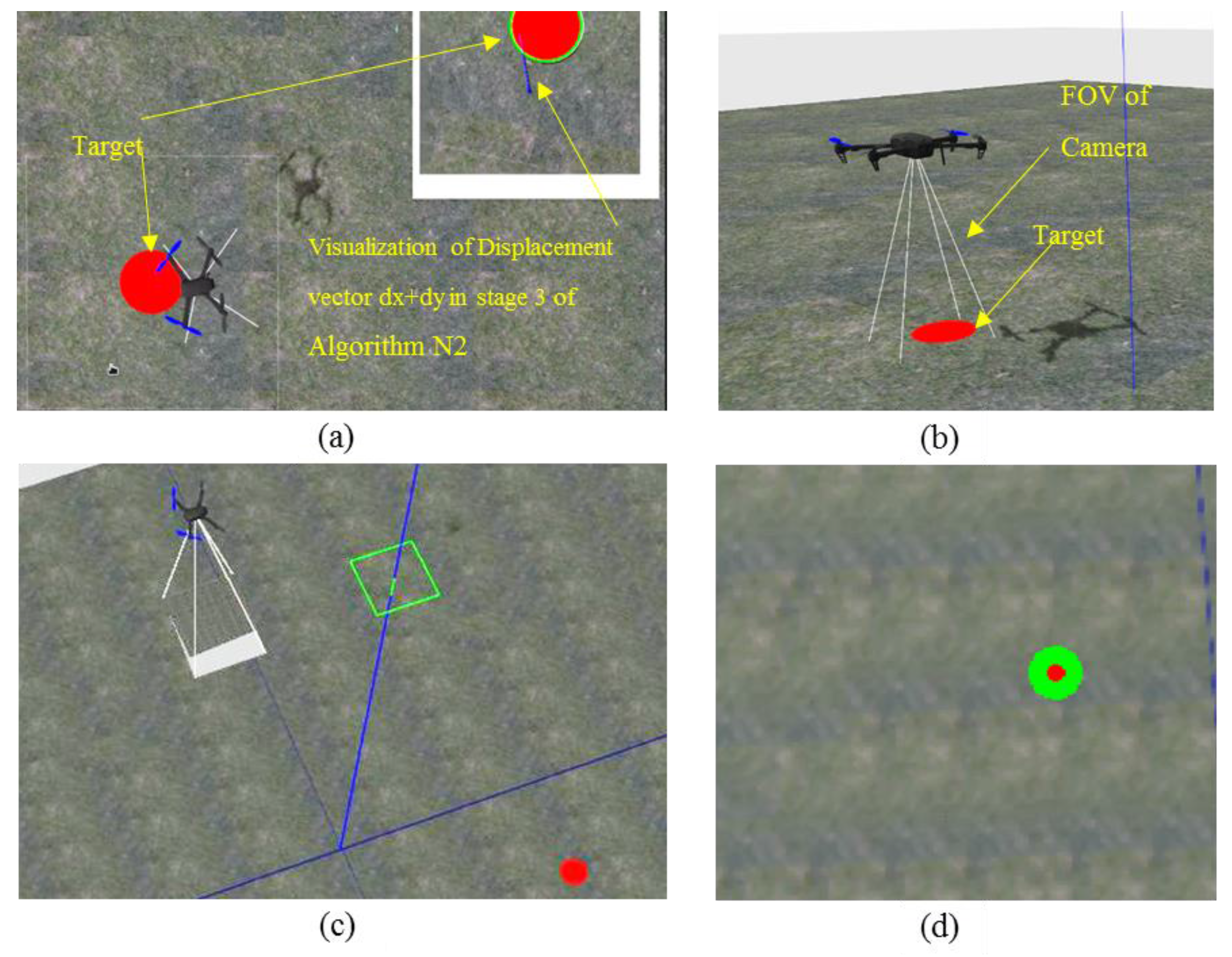
5.2. Simulation Experiments
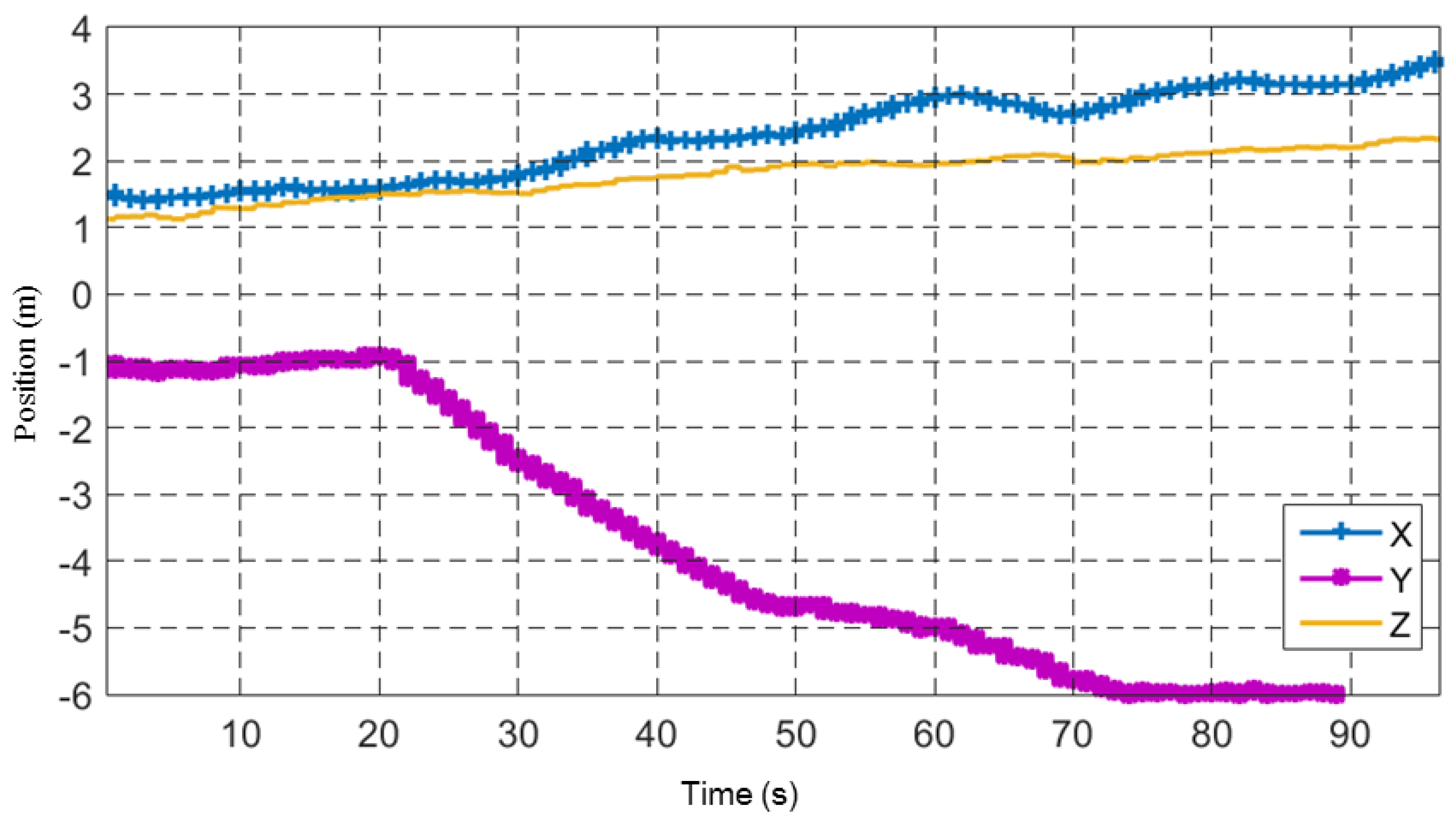
5.3. Flight Test Experiments
6. Results and Discussion
7. Conclusions
Author Contributions
Conflicts of Interest
References
- Liang, X.; Wang, H.; Li, D.; Liu, C. Three-dimensional path planning for unmanned aerial vehicles based on fluid flow. In Proceedings of the 2014 IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2014. [Google Scholar]
- Nolan, P.; Paley, D.A.; Kroeger, K. Multi-UAS path planning for non-uniform data collection in precision agriculture. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017. [Google Scholar]
- Wirth, L.; Oettershagen, P.; Ambühl, J.; Siegwart, R. Meteorological path planning using dynamic programming for a solar-powered UAV. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015. [Google Scholar]
- González, L.; Whitney, E.; Srinivas, K.; Périaux, J. Optimum multidisciplinary and multi-objective wing design in CFD using evolutionary techniques. In Computational Fluid Dynamics 2004, Proceedings of the Third International Conference on Computational Fluid Dynamics, ICCFD3, Toronto, ON, Canada, 12–16 July 2004; Groth, C., Zingg, D.W., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 681–686. [Google Scholar]
- Lee, D.S.; Gonzalez, L.F.; Périaux, J.; Srinivas, K. Evolutionary optimisation methods with uncertainty for modern multidisciplinary design in aeronautical engineering. In 100 Volumes of ‘Notes on Numerical Fluid Mechanics’: 40 Years of Numerical Fluid Mechanics and Aerodynamics in Retrospect; Hirschel, E.H., Krause, E., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 271–284. [Google Scholar]
- Henderson, L.; Glaser, T.; Kuester, F. Towards bio-inspired structural design of a 3D printable, ballistically deployable, multi-rotor UAV. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017. [Google Scholar]
- Alvarado, M.; Gonzalez, F.; Fletcher, A.; Doshi, A. Towards the development of a low cost airborne sensing system to monitor dust particles after blasting at open-pit mine sites. Sensors 2015, 15, 19667–19687. [Google Scholar] [CrossRef] [PubMed]
- Pena, J.M.; Torres-Sanchez, J.; de Castro, A.I.; Kelly, M.; Lopez-Granados, F. Weed mapping in early-season maize fields using object-based analysis of unmanned aerial vehicle (UAV) images. PLoS ONE 2013, 8, e77151. [Google Scholar] [CrossRef] [PubMed]
- Malaver, A.; Gonzalez, F.; Depari, A.; Corke, P.; Motta, N. Towards the development of a gas sensor system for monitoring pollutant gases in the low troposphere using small unmanned aerial vehicles. Proceedings of Workshop on Robotics for Environmental Monitoring, Sydney, Australia, 11 July 2012. [Google Scholar]
- Alsalam, B.H.Y.; Morton, K.; Campbell, D.; Gonzalez, F. Autonomous UAV with vision based on-board decision making for remote sensing and precision agriculture. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017. [Google Scholar]
- Ward, S.; Hensler, J.; Alsalam, B.; Gonzalez, L.F. Autonomous UAVs wildlife detection using thermal imaging, predictive navigation and computer vision. In Proceedings of the 2016 IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2016. [Google Scholar]
- Razinkova, A.; Cho, H.C. Tracking a moving ground object using quadcopter UAV in a presence of noise. In Proceedings of the 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Busan, Korea, 7–11 July 2015; pp. 1546–1551. [Google Scholar]
- Yang, S.; Scherer, S.A.; Zell, A. An onboard monocular vision system for autonomous takeoff, hovering and landing of a micro aerial vehicle. J. Intell. Robot. Syst. 2013, 69, 499–515. [Google Scholar] [CrossRef]
- Sholes, E. Evolution of a UAV autonomy classification taxonomy. In Proceedings of the 2007 IEEE Aerospace Conference, Piscataway, NJ, USA, 3–10 March 2007. [Google Scholar]
- Heinze, C.; Goss, S.; Josefsson, T.; Bennett, K.; Waugh, S.; Lloyd, I.; Murray, G.; Oldfiel, J. Interchanging agents and humans in military simulation. AI Magzine 2002, 23, 37–47. [Google Scholar]
- Sari, S.C.; Kuspriyanto; Prihatmanto, A.S. Decision system for robosoccer agent based on OODA Loop. In Proceedings of the 2012 International Conference on System Engineering and Technology (ICSET), Bandung, Indonesia, 11–12 September 2012. [Google Scholar]
- Máthé, K.; Buşoniu, L. Vision and control for UAVs: A survey of general methods and of inexpensive platforms for infrastructure inspection. Sensors 2015, 15, 14887–14916. [Google Scholar] [CrossRef] [PubMed]
- Araar, O.; Aouf, N. In Visual servoing of a Quadrotor UAV for autonomous power lines inspection. In Proceedings of the 2014 22nd Mediterranean Conference of Control and Automation (MED), Palermo, Italy, 16–19 June 2014; pp. 1418–1424. [Google Scholar]
- Máthé, K.; Buşoniu, L.; Barabás, L.; Iuga, C.I.; Miclea, L.; Braband, J. Vision-based control of a quadrotor for an object inspection scenario. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 849–857. [Google Scholar]
- Youeyun, J.; Hyochoong, B.; Dongjin, L. Robust marker tracking algorithm for precise UAV vision-based autonomous landing. In Proceedings of the 2015 15th International Conference on Control, Automation and Systems (ICCAS), Busan, Korea, 13–16 October 2015; pp. 443–446. [Google Scholar]
- Hanseob, L.; Seokwoo, J.; Shim, D.H. Vision-based UAV landing on the moving vehicle. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Piscataway, NJ, USA, 7–10 June 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar]
- Singh, G.; Anvar, A. Investigating feasibility of target detection by visual servoing using UAV for oceanic applications. In Proceedings of the 2014 13th International Conference on Control Automation Robotics & Vision (ICARCV), Singapore, 10–12 December 2014; pp. 1621–1626. [Google Scholar]
- Choi, H.; Geeves, M.; Alsalam, B.; Gonzalez, F. Open source computer-vision based guidance system for UAVs on-board decision making. In Proceedings of the 2016 IEEE Aerospace Conference, Big Sky, MT, USA, 5–12 March 2016. [Google Scholar]
- Available online: https://medium.com/@Dronesmith/why-we-chose-px4-vs-apm-as-lucis-default-firmware-ea39f4514bef#.2a1pl81ao (accessed on 2 January 2017).
- Robot Operating System. Available online: http://wiki.ros.org (accessed on 6 June 2017).
- Sol. Detect Red Circles in an Image Using OpenCV. Available online: https://www.solarianprogrammer.com/2015/05/08/detect-red-circles-image-using-opencv/ (accessed on 3 February 2017).
- Camera Calibration/Tutorials/MonocularCalibration. Available online: http://wiki.ros.org/camera_calibration/Tutorials/MonocularCalibration (accessed on 6 June 2017).
- Mavros. Available online: http://wiki.ros.org/mavros (accessed on 2 June 2017).
- Stathopoulos, C. Visual Servoing Using a Webcam, Arduino and OpenCV. Available online: https://xstath.wordpress.com/2015/06/04/visual-servoing-using-a-webcam-arduino-and-opencv/ (accessed on 6 August 2016).
- Gazebo. Available online: http://gazebosim.org/ (accessed on 7 August 2017).
- Addabbo, P.; Angrisano, A.; Bernardi, M.L.; Gagliarde, G.; Mennella, A.; Nisi, M.; Ullo, S. A UAV infrared measurement approach for defect detection in photovoltaic plants. In Proceedings of the 2017 IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Padua, Italy, 21–23 June 2017; pp. 345–350. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Height (m) | Success Rate (Simulation) | Success Rate (Flight Test) |
|---|---|---|
| 10 | 100% (5/5) | 100% (5/5) |
| 15 | 100% (5/5) | 80% (4/5) |
| 20 | 100% (5/5) | 100% (5/5) |
| 30 | 100% (5/5) | 80% (4/5) |
| 40 | 100% (5/5) | 100% (5/5) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hinas, A.; Roberts, J.M.; Gonzalez, F. Vision-Based Target Finding and Inspection of a Ground Target Using a Multirotor UAV System. Sensors 2017, 17, 2929. https://doi.org/10.3390/s17122929
Hinas A, Roberts JM, Gonzalez F. Vision-Based Target Finding and Inspection of a Ground Target Using a Multirotor UAV System. Sensors. 2017; 17(12):2929. https://doi.org/10.3390/s17122929
Chicago/Turabian StyleHinas, Ajmal, Jonathan M. Roberts, and Felipe Gonzalez. 2017. "Vision-Based Target Finding and Inspection of a Ground Target Using a Multirotor UAV System" Sensors 17, no. 12: 2929. https://doi.org/10.3390/s17122929
APA StyleHinas, A., Roberts, J. M., & Gonzalez, F. (2017). Vision-Based Target Finding and Inspection of a Ground Target Using a Multirotor UAV System. Sensors, 17(12), 2929. https://doi.org/10.3390/s17122929