1. Introduction
Many laboratory rock friction experiments have previously focused on steady-state or quasi-static fault motions, related to testing empirical rate- and state-dependent friction constitutive laws [
1,
2,
3,
4,
5,
6,
7,
8,
9] which are widely used to model a variety of earthquake processes. A critical part of laboratory rock friction experiments such as these, is the ability to make detailed and accurate measurements of the fault slip. A variety of position sensing technologies have been employed in laboratory experiments to measure fault slip, including, but not limited to; linear-variable differential transformers (LVDT and DCDT), magnetostriction devices, eddy currents, linear capacitors, foil strain gages, and optical methods. All of these technologies can offer excellent accuracy and resolution performance. Each technology offers advantages and disadvantages with respect to the measurement range, bandwidth, ease of use, signal conditioning requirements, and cost. Experimental conditions also impact sensor selection and performance with respect to mounting and space constraints, line of sight access for optical sensors, and sensitivity to temperature, shock, and vibration.
In steady-state velocity experiments, the shock and vibrations related to stick-slip fault motion are largely absent, and the frequency content of position signals is generally very low, DC to several Hz. In this frequency range, investigators have wide latitude in the selection and mounting of position sensors, as well as in the selection of signal conditioning. While all the previously mentioned methods of measuring fault slip can be used to document total stick-slip fault motion, measurements of the dynamic higher frequency aspects of stick-slip fault motion present challenges to all of these technologies. For example; sensor and signal conditioning bandwidth limitations, limited space near the fault restricting sensor deployment, and shock induced resonance of sensor mounts can degrade position measurements and obscure short period details of the actual fault motion.
In recent years, there has been renewed and increased interest in investigations of the dynamic aspects of fault motion related to earthquakes [
10,
11,
12,
13,
14,
15,
16,
17,
18,
19]. Laboratory friction experiments have been employed for many years to study a wide variety of dynamic earthquake processes. The long-standing hypothesis is that laboratory stick-slip friction experiments are essentially earthquake analogs, and have been thoughtfully examined by others, e.g., [
11]. Examples of recent investigations into the dynamic motion of laboratory faults include work by Lockner et al. [
18] who performed triaxial stick-slip experiments using 25.4 mm diameter × 63.5 mm long cylinder samples of Westerly granite with a saw cut fault that show fault slip rates approaching 20 m/s, and estimates of event durations as short as 70 microseconds. Passelegue et al. [
17] also performed triaxial stick-slip experiments using 40 mm diameter × 80 mm long cylinders of Westerly granite with a saw cut fault and report fault slip rates approaching 10 m/s, and event durations measured in 10’s to 100’s of microseconds. Ohnaka et al. [
20] previously investigated stick-slip fault motions using 28 cm × 28 cm × 5 and 10 cm thick saw cut samples of Tsukuba granite, and reported peak accelerations measured in 100,000’s m/s
2, and fault slip velocities approaching 1 m/s. As interest in laboratory stick-slip experiments continues, fault slip sensors used in such tests will need to be rugged wideband instruments in order to accurately resolve the details of rapid dynamic fault motions.
A new method to make accurate and detailed wideband measurements of dynamic fault slip employs a small magnetoresistive sensor, a small but powerful magnet, and custom wide bandwidth signal conditioning electronics. The sensors components are directly attached to the rock samples, eliminating the need for a conventional cantilever type sensor mount. The inability to reposition the sensor or the magnet as fault slip accumulates is accommodated by custom signal conditioning electronics which keep the sensor output on-scale as the experiments are performed and slip accumulates. The analog output of the sensor is sinusoidal, but becomes nearly linear if an appropriate interval of the sensing range is chosen, as in these tests. A calibration technique is presented that converts measured voltage to fault displacement, while maintaining an acceptable level of error. Data generated by the magnetic position sensor in response to stick-slip fault motion along a 2 m long × 0.4 m deep fault are compared to data simultaneously collected by two laser vibrometers measuring the velocity and position (time-integrated velocity) of the sensor and magnet, and other nearby position and strain sensors to demonstrate the capabilities, and sensitivity of this position measuring method.
An unanticipated observation of this study is the apparent sensitivity of this sensor to electromagnetic (EM) signals generated during dynamic stick-slip along the 2-m fault used in these tests. While clear EM signals have long been observed nearby, and at the time of many large earthquakes and volcanic eruptions apparently related to crustal stress release, no unambiguous observations of EM precursor behavior in the epicentral region have been observed [
21,
22,
23,
24]. Some associations of global EM disturbances in the ionosphere and magnetosphere prior to large earthquakes have been made [
25], but these observations appear to result from inadequate correction of normal EM disturbances and selective use of data only prior to these earthquakes [
26,
27,
28,
29,
30,
31,
32,
33,
34,
35]. In addition to field studies, numerous laboratory investigations have documented EM emissions related to the fracture of rock samples [
36,
37,
38,
39,
40,
41,
42,
43,
44,
45,
46]. A smaller number of laboratory investigations have investigated EM emissions related to rock friction and stick-slip fault motions, generally using relatively small samples and single point measurements of EM radiation [
47,
48,
49,
50,
51]. No experiments appear to have used an array of sensors along a sufficiently long fault to observe EM emissions related to propagating fault rupture processes, as this report documents. Nevertheless, the search for the physics behind EM emissions related to earthquakes and volcanic processes remains the subject of debate [
52].
Various physical mechanisms have been identified as contributing to the generation of earthquake and volcanic related EM emissions. These include piezomagnetic effects, electrokinetic effects, induced EM signals from seismic wave motion, triboelectric effects and other charge generation processes [
22]. Piezomagnetism is the property of some ferro-crystalline materials where induced and remnant magnetism changes with applied stress. Electrokinetic effect can result from tectonic stress induced flow of conductive fluids through porous, permeable and conductive rock mass [
53]. EM signals can also be generated by motion of the earth’s crust within the dynamic and static geomagnetic field, caused by crustal loading and/or seismic waves [
54]. EM effects can be both fast and slow since movement of the crust can occur fast (earthquakes) and slowly (tectonic loading). Triboelectric effects result from charge separation during microcracking and rock shearing around the rupture surface [
23]. Regardless of the origin of the signals detected in this report, which are not known, the study of the origin and quantification of suspected EM signals observed in these tests requires equipment and techniques beyond the scope of this report. Accordingly, the discussion of the physical origin of EM signals observed here will be the subject of further investigation.
2. Materials and Methods
This measurement technique relies on the Honeywell HMC1501 [
55,
56,
57], a high resolution anisotropic magnetoresistive linear, angular, and rotary displacement sensor in a Small Outline Integrated Circuit (SOIC) surface-mount package, referred hence forth as the AMR sensor. Magnetoresistance is a property of some ferrous materials where electrical resistance varies as a function of the strength of an applied magnetic field. Anisotropic magnetoresistance (AM) is a property of some magnetoresistive materials, where the electrical resistance of the material varies as a function of both the strength and direction of an externally applied magnetic field, as well as the path of current flow through that material [
58,
59,
60,
61]. The magnitude of the change in electrical resistance of Permalloy, the AM material used in these AMR sensors, in response to changes in the orientation of an applied magnetic field, is as much as 2 to 3 percent at room temperature. For comparison, a standard 350-ohm foil strain gage with a gage factor of 2, subject to 1000 micro-strain of shortening or elongation, will change the resistance of that gage by only about 0.2 percent. A sufficiently strong, or ‘saturating’ magnetic field maximizes the AM effect in magnetoresistive materials while simultaneously minimizing any effects of stray external magnetic fields. Once the magnitude of the applied magnetic field exceeds the saturation threshold of the AM material, and the path of current flow through the AM material is fixed, the electrical resistance of that AM material then should only vary with the direction of the applied magnetic field, which is the principle behind the functionality of this AMR sensor.
This AMR sensor is considered ‘saturated’ if used in a magnetic field with a strength equal or greater than 80 oersteds (approximately 80 gauss) [
57]. For reference, the intensity of the Earth’s magnetic field,
F, in Menlo Park, CA is approximately 50,000 nT or 0.5 Gauss [
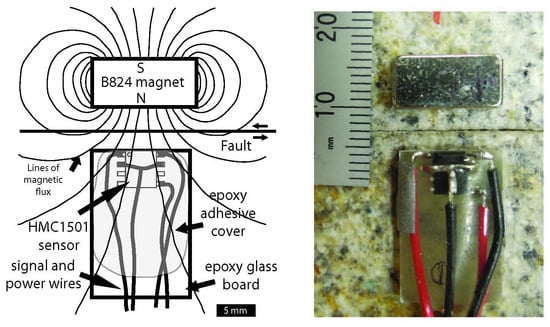
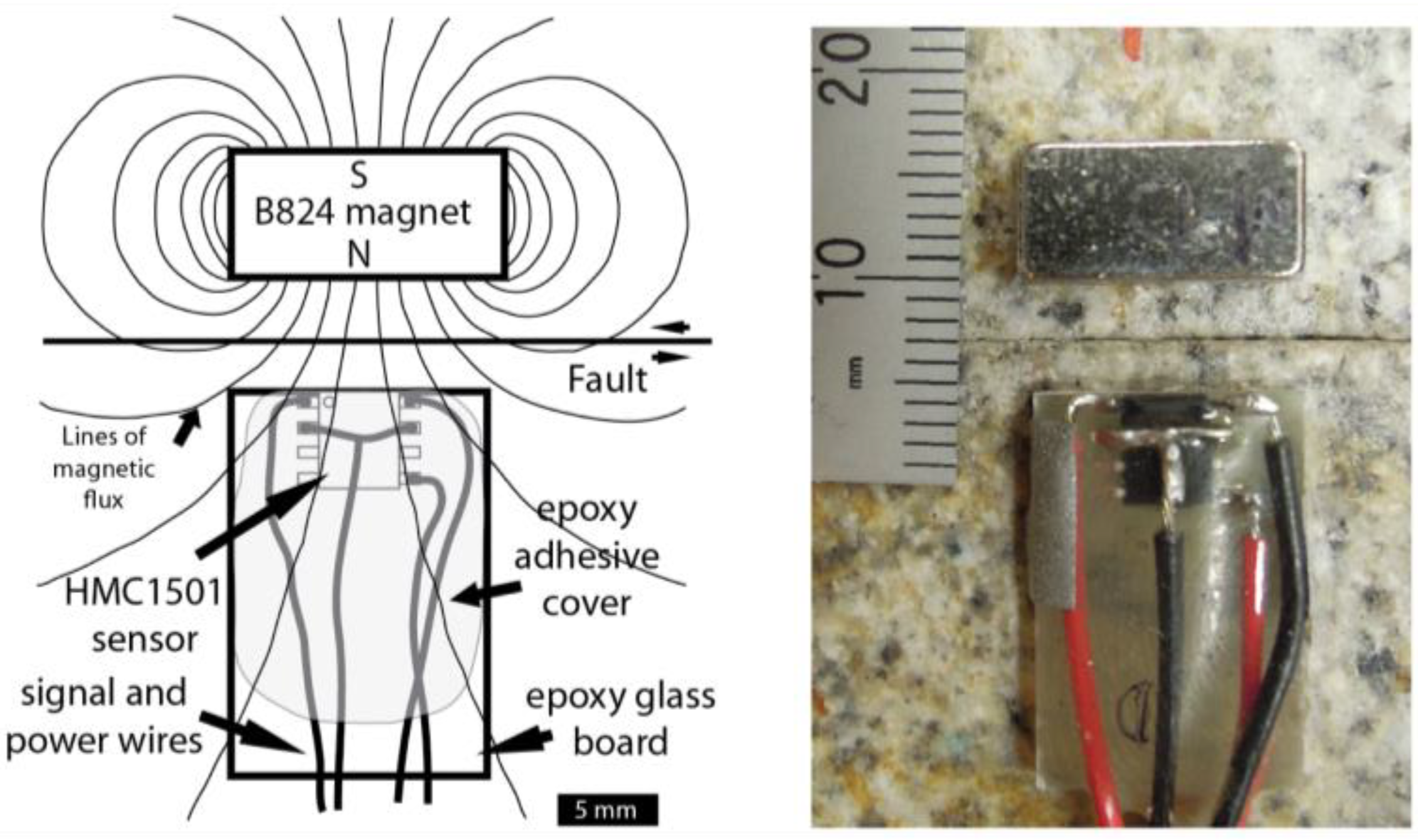
62]. A small rare-earth neodymium magnet with a nominal surface field strength of 5876 Gauss, item number B824 from K&J Magnetics, Inc. (Pipersville, PA, USA) [
63], was identified as one of many suitable magnets for use with the AMR sensor for these tests. The strength of the magnetic field around the AMR sensor, with a 5-mm gap between the magnet and the sensor, as deployed in these tests, was found to exceed 80 Gauss using a model GM1-ST DC Gauss meter from AlphaLab Inc. (Salt Lake City, UT, USA) [
64].
Identifying magnets with sufficient field strength to ‘saturate’ the AMR sensor is a straight forward process. Identifying the shape of the magnetic flux planes that emanate from a magnet, and evaluating the geometry of how the sensor will cut through those flux planes during anticipated slip motion is a more complex process and must be considered when selecting a magnet to pair with the sensor. The AMR sensing bridge is a two-dimensional structure, while magnetic field flux can vary in three-dimensions. One method to identify the orientation of the flux planes of a target magnet to aid in the positioning and planned motion of the sensor and its target magnet is to use a 3-axis (X-Y-Z) linear translation stage to precisely move the AMR sensor and magnet relative to each other, generate contour plots of equal signal output from the AMR sensor, and map the flux planes of the target magnet. The AMR sensor generates the largest change in the analog signal output when it and its magnet are positioned such that the relative motion between the sensor and the magnet causes the greatest number of magnetic field lines to orthogonally cross the sensing element of the AMR sensor. Careful consideration must be given to how undesirable or unexpected motions of either the sensor or the magnet may influence the signal output of the sensor. The AMR sensor has a continuously varying analog voltage output and is capable of resolving angles between planes of magnetic flux as small as 0.07 degrees. The signal to noise of the signal conditioning used in these tests impacts sensor resolution as well. As deployed in these tests, with a 5-mm gap between the sensor and a laterally moving magnet, 0.07 degrees of angular resolution translates into a fault slip resolution of approximately 6 microns. For these tests sensor response was examined for both the anticipated fault parallel/horizontal fault slip motion to develop calibration curves for the slip displacement data, as well as for possible differential vertical fault motions, to determine the transverse sensitivity of the AMR sensor.
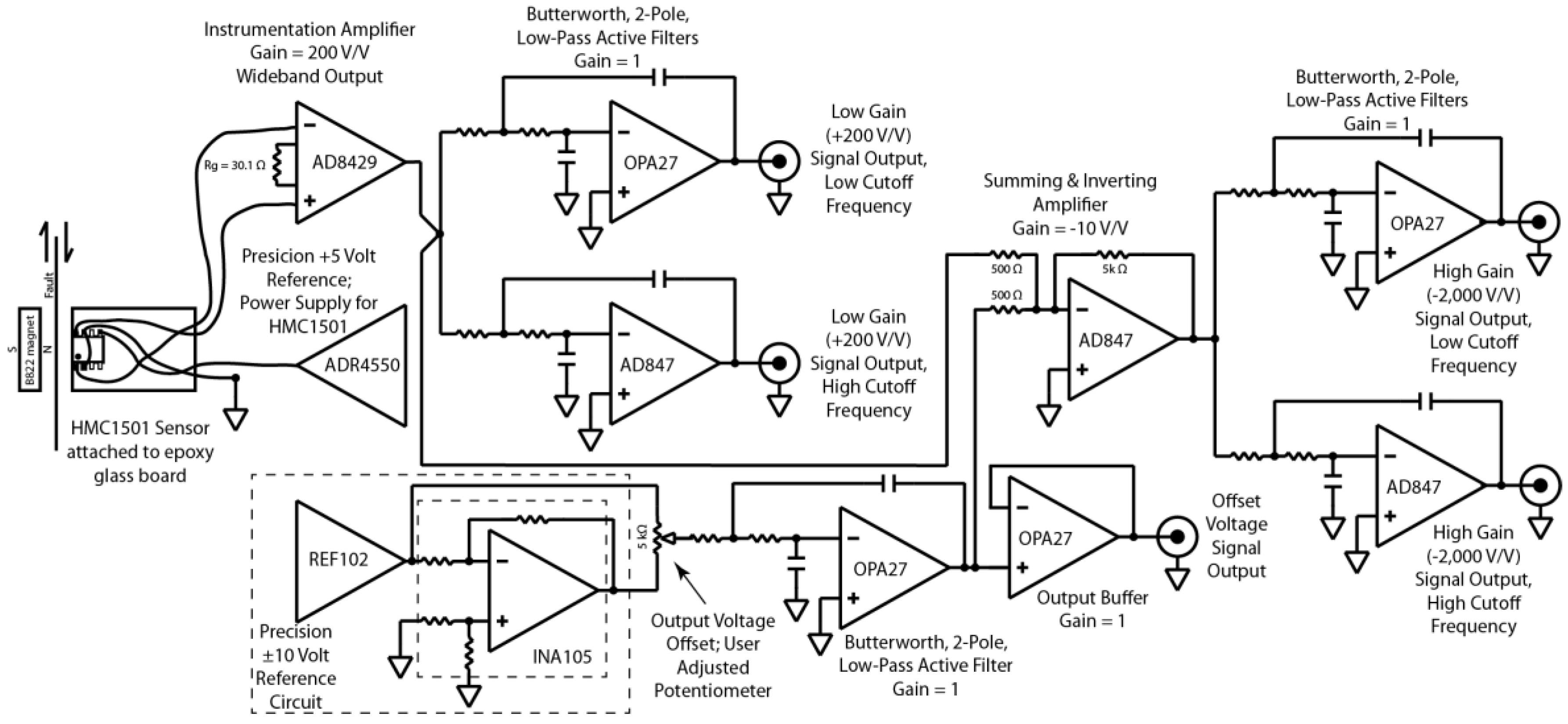
To facilitate the use of the AMR sensor, the SOIC chip was first attached to a small (19 mm × 13 mm × 1.6 mm) piece of solid epoxy glass composite prototyping board (no copper cladding or pre-drilled holes) using a slightly viscous cyanoacrylate adhesive (Loctite 454). The prototype board is a rigid inert (electrically non-conductive, and non-magnetic) platform for the SOIC chip, and greatly facilitates the subsequent handling, wiring, and installation of the sensor assembly. Shielded twisted pair wiring is used to make the power-in and signal-out connections with the sensor. A top coat of two-part epoxy is used to encapsulate and firmly secure the SOIC chip and the attached lead wires to the prototype board. The result is a low profile, rugged, easy to handle sensor assembly. When deployed, the magnet and sensor assembly are bonded directly to the test samples using the same cyanoacrylate adhesive, eliminating the need for additional sensor mounting fixtures (
Figure 1).
Since the sensor components are permanently attached to the samples and not physically adjustable, the signal conditioning circuit needs to electronically compensate for continuously accumulating fault slip over many stick-slip events that would otherwise cause the sensors amplified signal output to shift off scale. Sufficient amplification of the sensor signal is also required so details of quasi-static and dynamic sensor motion are resolvable. The signal conditioning electronics are comprised of a reference voltage source to provide a stable excitation voltage to the sensor, a two-stage amplifier with a user adjustable output offset between the two amplifier stages, and low-pass active filters for the signal outputs as needed. For details regarding the signal conditioning for the AMR sensor as used in this study, see the
Appendix in this article.
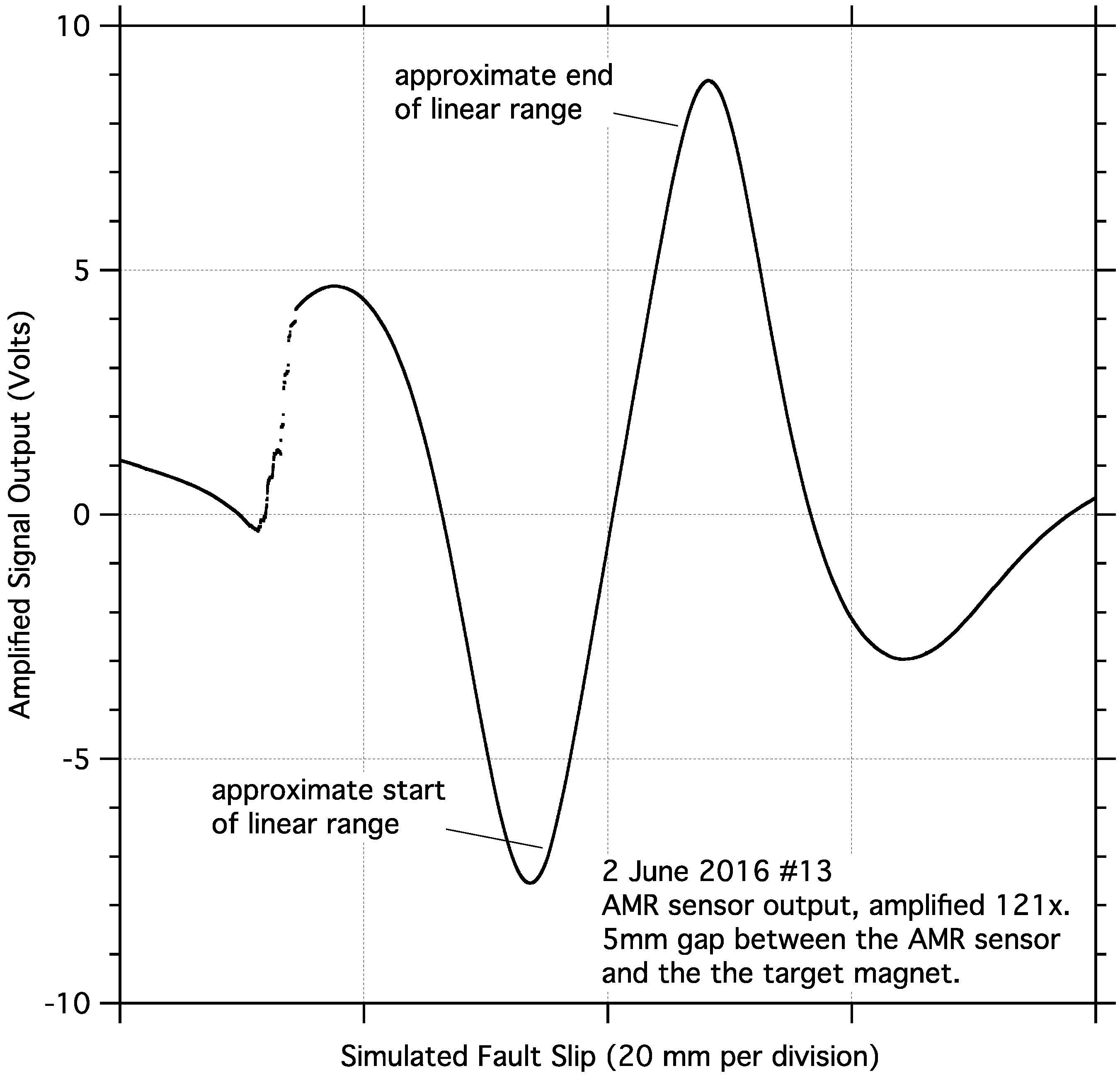
The analog signal output of the AMR sensor, responding to relative motion of the sensor and a magnet, is approximately sinusoidal,
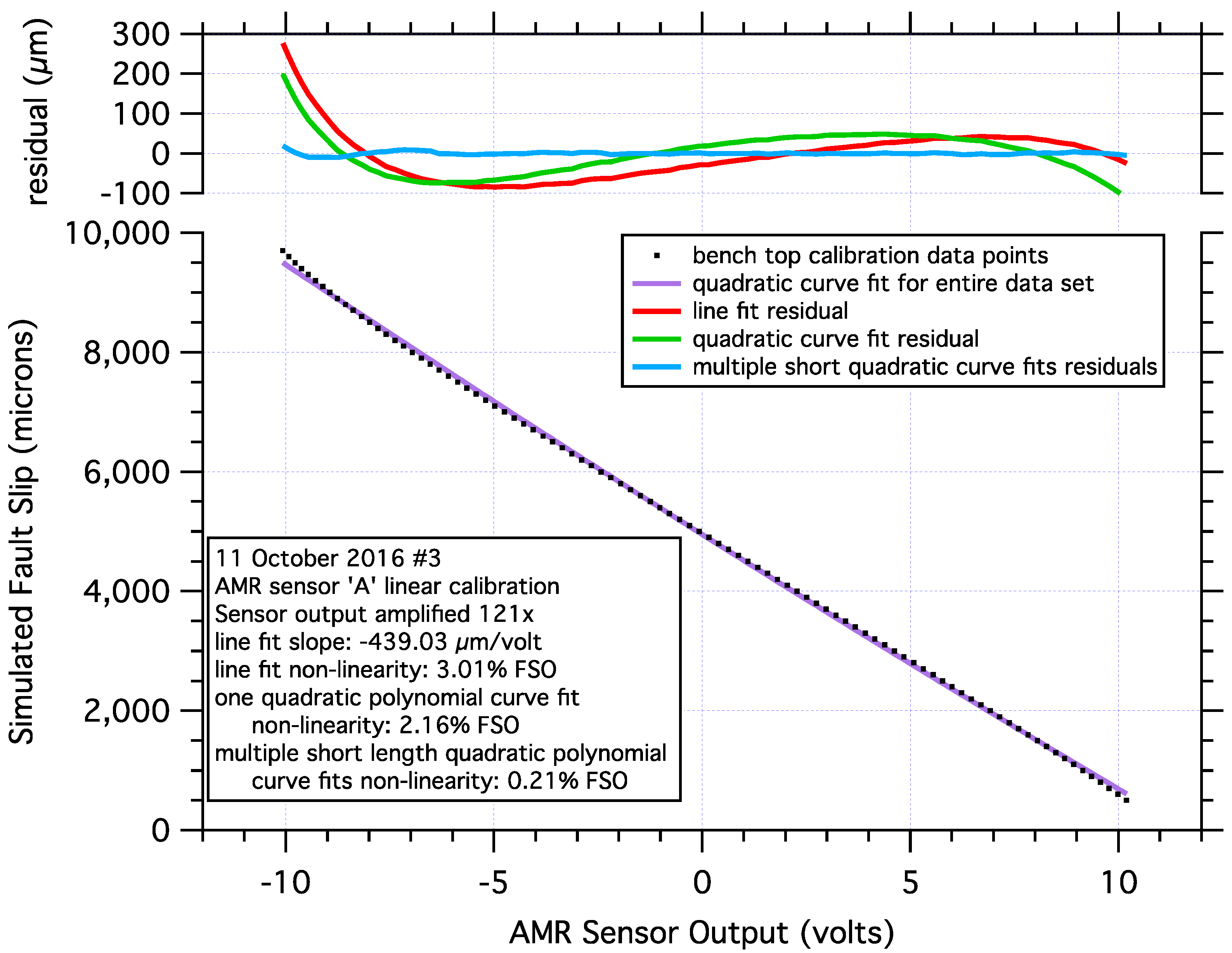
Figure 2. However, within a limited range of motion, a significant portion of the sensor output is approximately linear, and exploited to measure fault slip in these tests. The desktop calibration of the sensor was performed using a precision linear translation stage(s) paired with manual micrometer head with 20 micron graduations and 1 micron of sensitivity. The sensor and magnet were attached to the calibration stand using plastic mounts to maintain a minimum gap of about 4 cm between the sensor/magnet and any metal to minimize any unwanted magnetic interactions. The 5-mm gap separating, and the relative motion of the sensor and magnet in the calibration stand, are both exactly as they are deployed on the sample blocks. Calibration data were collected from the signal output of the first (lower gain) stage of the signal conditioning circuit at 100 micron intervals. Representative calibration data with a quadratic curve fit are shown in
Figure 3. For additional details regarding the calibration of this sensor, see the
Appendix in this article.
Determining a static position calibration for a position sensor is a straight forward procedure. Directly determining the frequency dependent response of a position sensor over a range of frequencies likely to be encountered during dynamic stick-slip motion poses more difficulties. The problem is the lack of a vibration source, calibrated or not, that can vibrate a sensor or sensor target, at frequencies from Hz to several 10’s of kHz, with motion of sufficient amplitude that the sensor can accurately resolve. Portable commercial reference shakers typically operate at 1000 rads/s (159.2 Hz) with 10 microns (rms) of motion, though some reference shakers have peak frequencies as high as 1 kHz to 10 kHz. Costlier laboratory benchtop piezo vibrators can generate vibrations at frequencies of several 10’s of kHz. However, as the frequency of the vibration increases from Hz to 10’s of kHz, the amplitude of the motion of the reference shaker necessarily decreases from microns to nanometers. The limited range of motion of high frequency reference shakers is likely at or below the resolution or noise threshold of most position sensors, thus preventing their use in any sort of meaningful calibration procedure. In these tests, spectral analysis of the sensor signals is used to evaluate their frequency response.
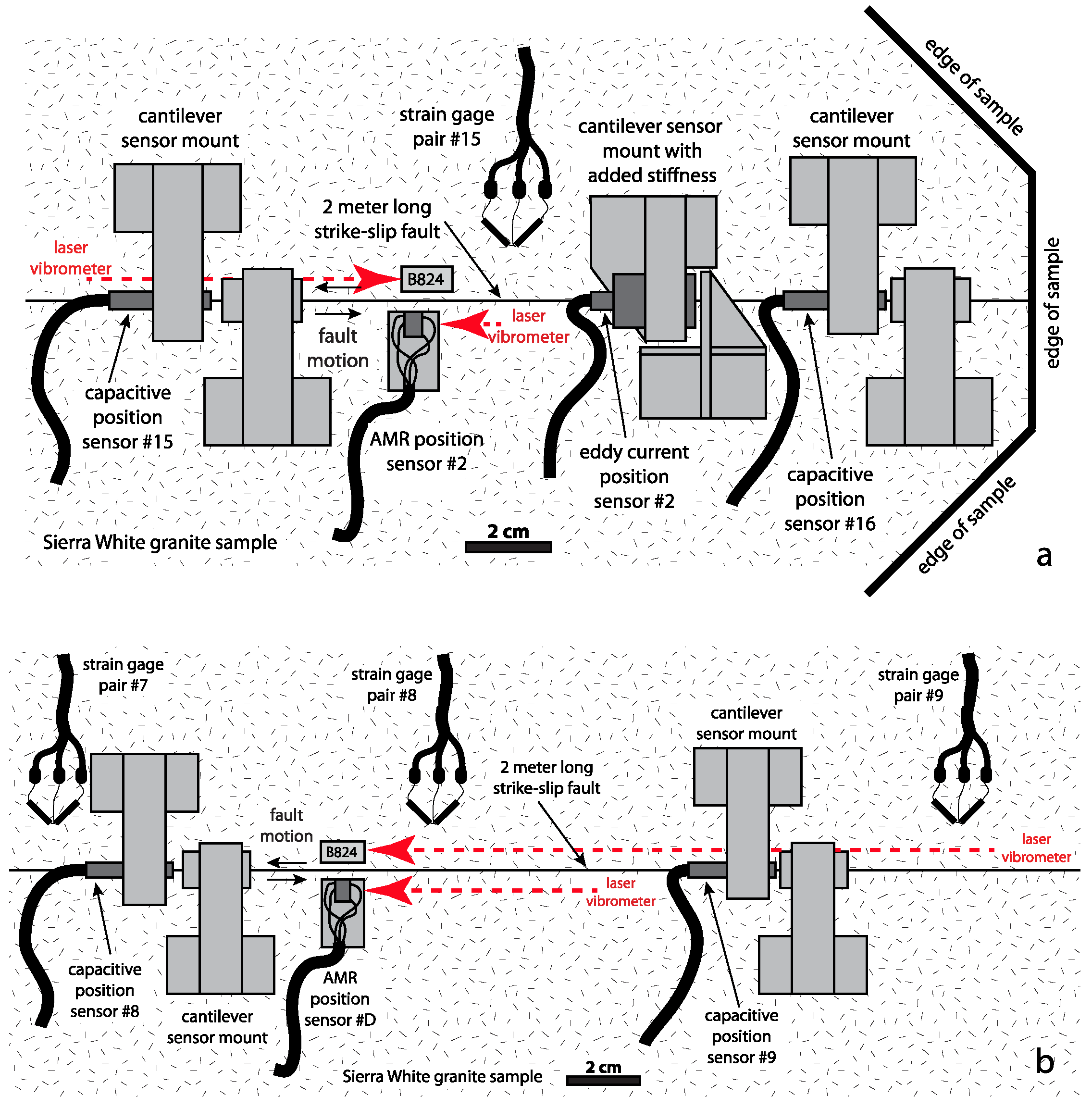
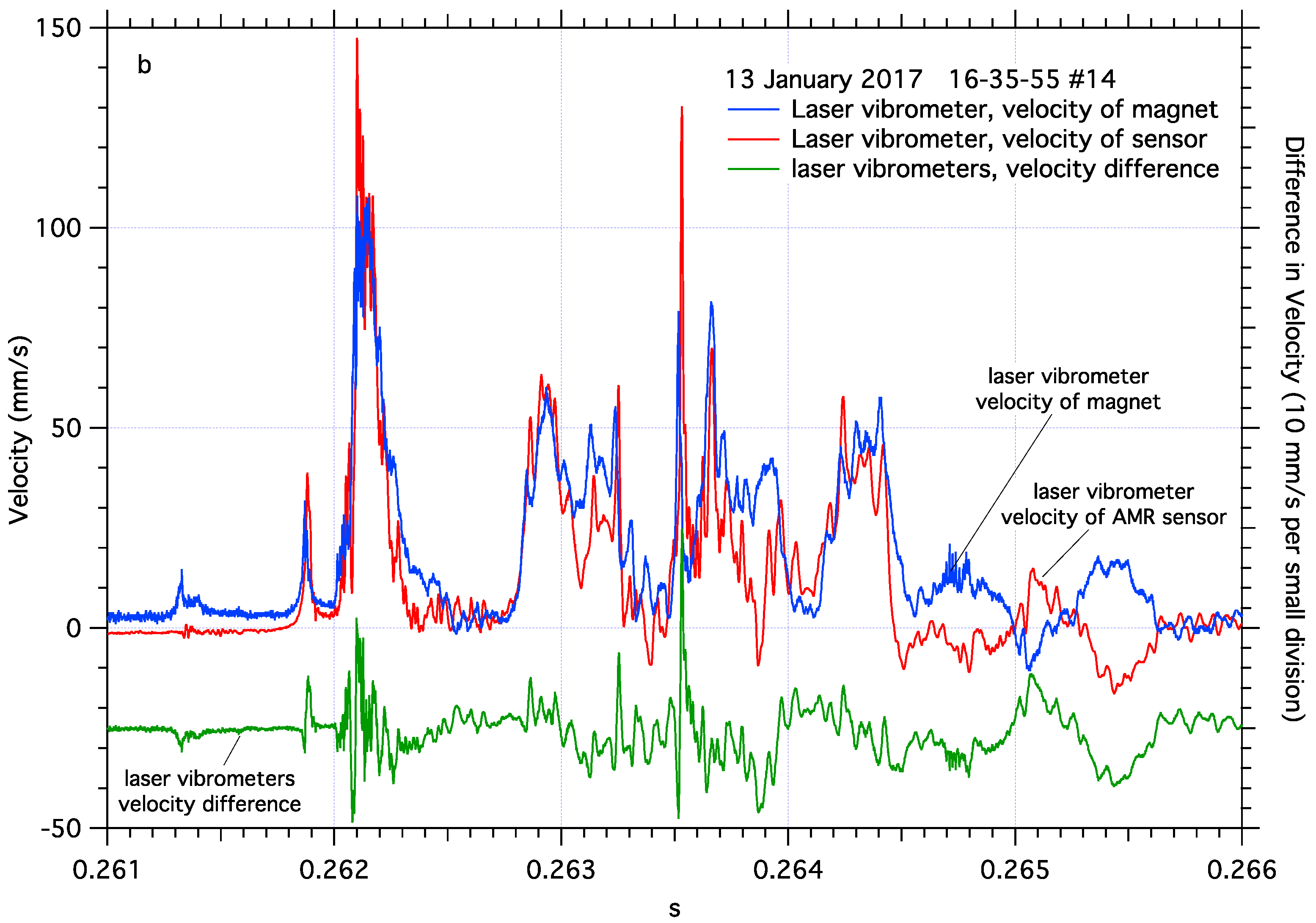
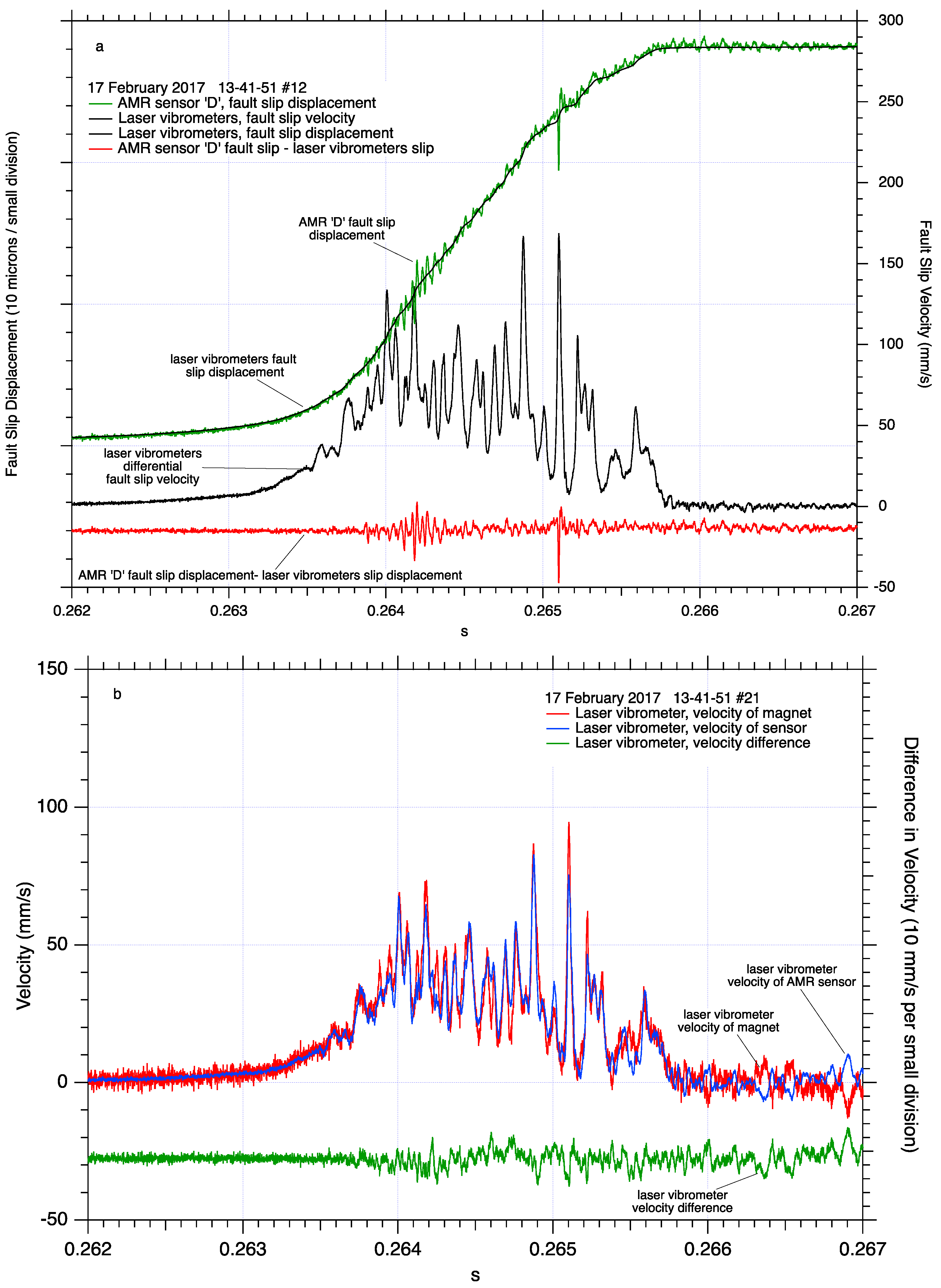
The dynamic performance of the AMR sensor used in this study was verified directly using a pair of Polytec CLV-2534 laser vibrometers, which use heterodyne interferometry techniques to generate wide bandwidth high resolution measurements of velocity, which can later be integrated to position for direct comparison to the AMR sensor measurements. The vibrometers are attached to a rigid scaffold above the sample blocks, and the scaffold is resting on the floor of the lab. All vibrometer measurements are therefore referenced to the floor of the lab. Ninety-degree beam turners attached to the vibrometers direct their laser beams to their respective targets so the beams are orthogonal to the target surfaces, and parallel with their anticipated motion. The vibrometers separately measure the velocity of the sensor and magnets on opposite sides of the fault, and those signals are summed or differenced (depending on the relative position of the vibrometer and motion of the target) to produce differential fault slip velocity which is integrated to a fault slip displacement signal. Scaled velocity signals from the vibrometers are linearly de-trended to remove any subtle instrument drift, which improves the quality of position signals integrated from the velocity signals. Fault slip displacement determined by the laser vibrometers should in principle, exactly match the fault slip determined by the AMR sensor. In contrast, the AMR sensors measure fault slip displacement directly across the fault. Vibrometer #1 performance specs: 0 to 350 kHz frequency response, and a frequency dependent resolution of typically 0.06 (µm/s)/√Hz. Vibrometer #2 performance specs: 0.5 Hz to 5 MHz frequency response, and a frequency dependent resolution, typically 0.5 (µm/s)/√Hz.
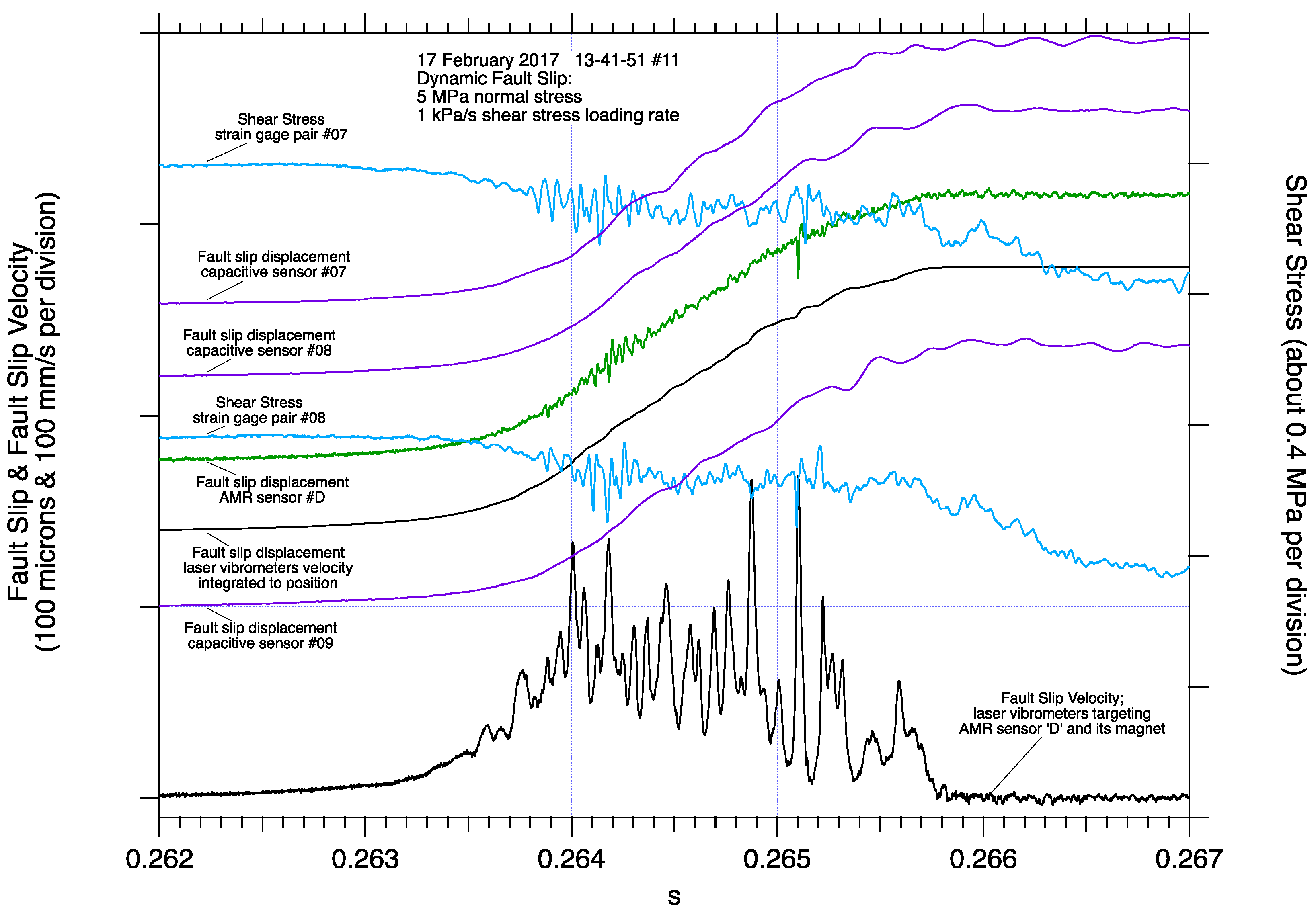
Stick-slip experiments were performed using the large bi-axial test apparatus, using Sierra White granite samples with a simulated strike-slip fault, 2-m-long and 0.4 m deep, located at the U.S. Geological Survey in Menlo Park, CA, USA [
10,
12,
13,
65,
66,
67,
68,
69] (
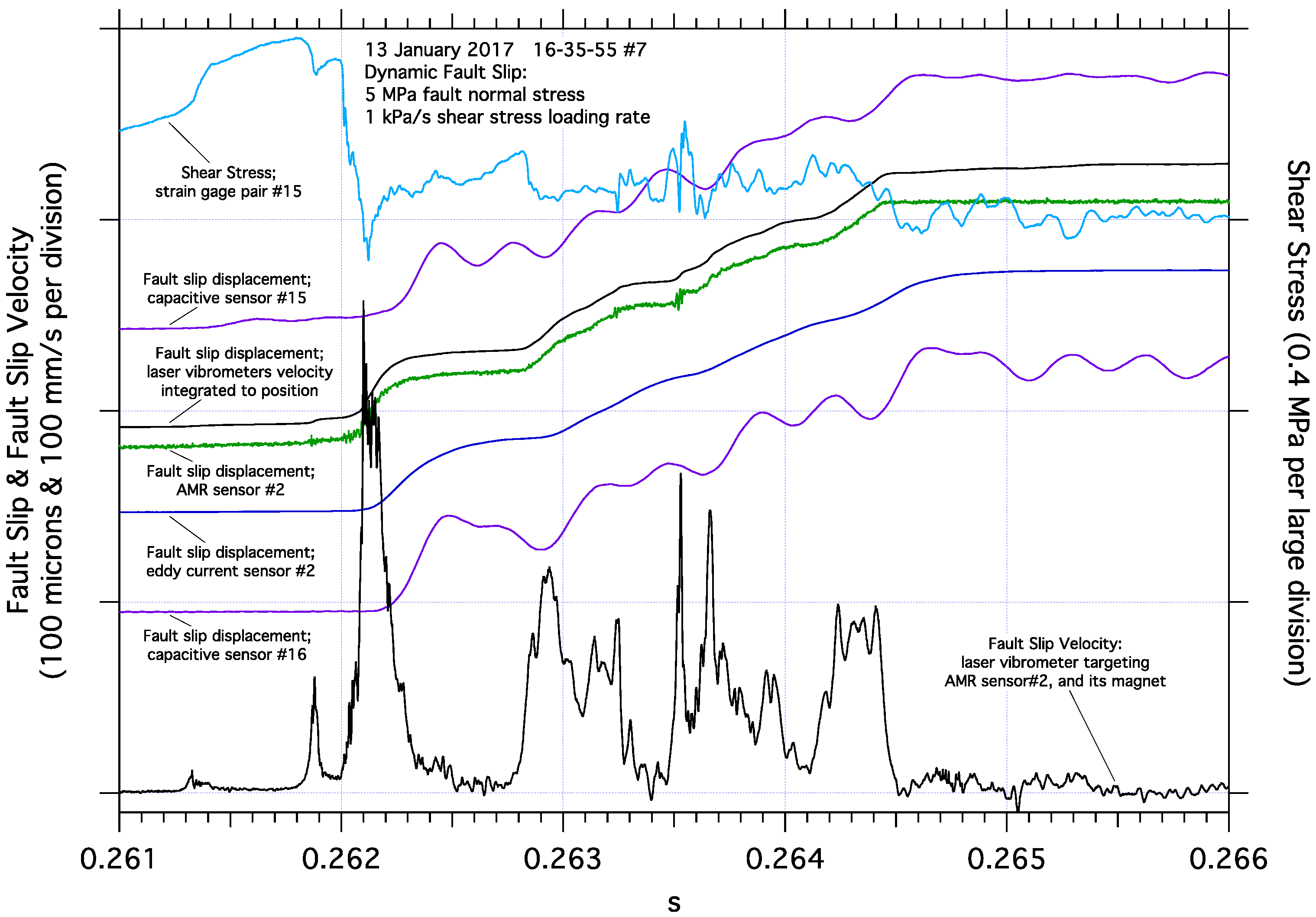
Figure 4). A constant normal stress of 5 MPa was imposed on the fault, and a constant shear stress loading rate of 1 kPa/s was applied to the fault until a dynamic stick-slip event was generated. After the initial shear stress loading and stick-slip fault motion, the loading process was repeated several more times until subsequent loading cycles produced nominally consistent events, from which the data in this report were obtained. The initial shear stress for each subsequent loading cycle was the residual shear stress of the preceding event. The time between subsequent shear loading cycles was neither systematic nor considered in the analysis of these data. Peak shear stress immediately prior to stick-slip was approximately 3.9 MPa, with a stress drop of approximately 0.4 MPa for most stick-slip events in this study. During stick-slip, all sensor signals were simultaneously recorded at either 1 MS/s (12-bit resolution), 1 MS/s (16-bit resolution), or 10 MS/s (14-bit resolution) for a fraction of a second using three 50%/50% pre-trigger/post-trigger recording systems. The 10 MS/s data were later resampled to 1 MS/s to facilitate the merger of all of the data sets. All experiments were conducted at room temperature under dry conditions.
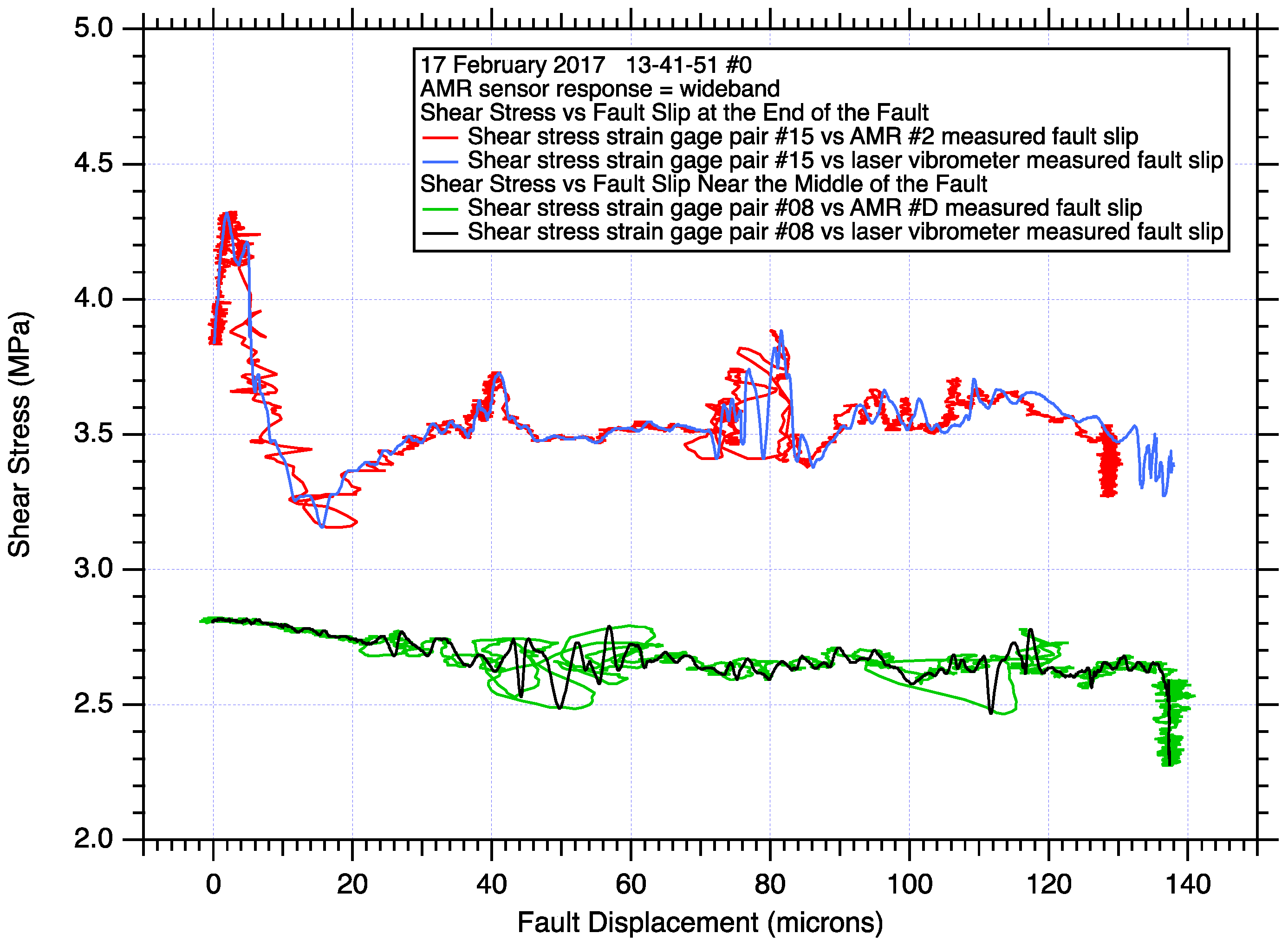
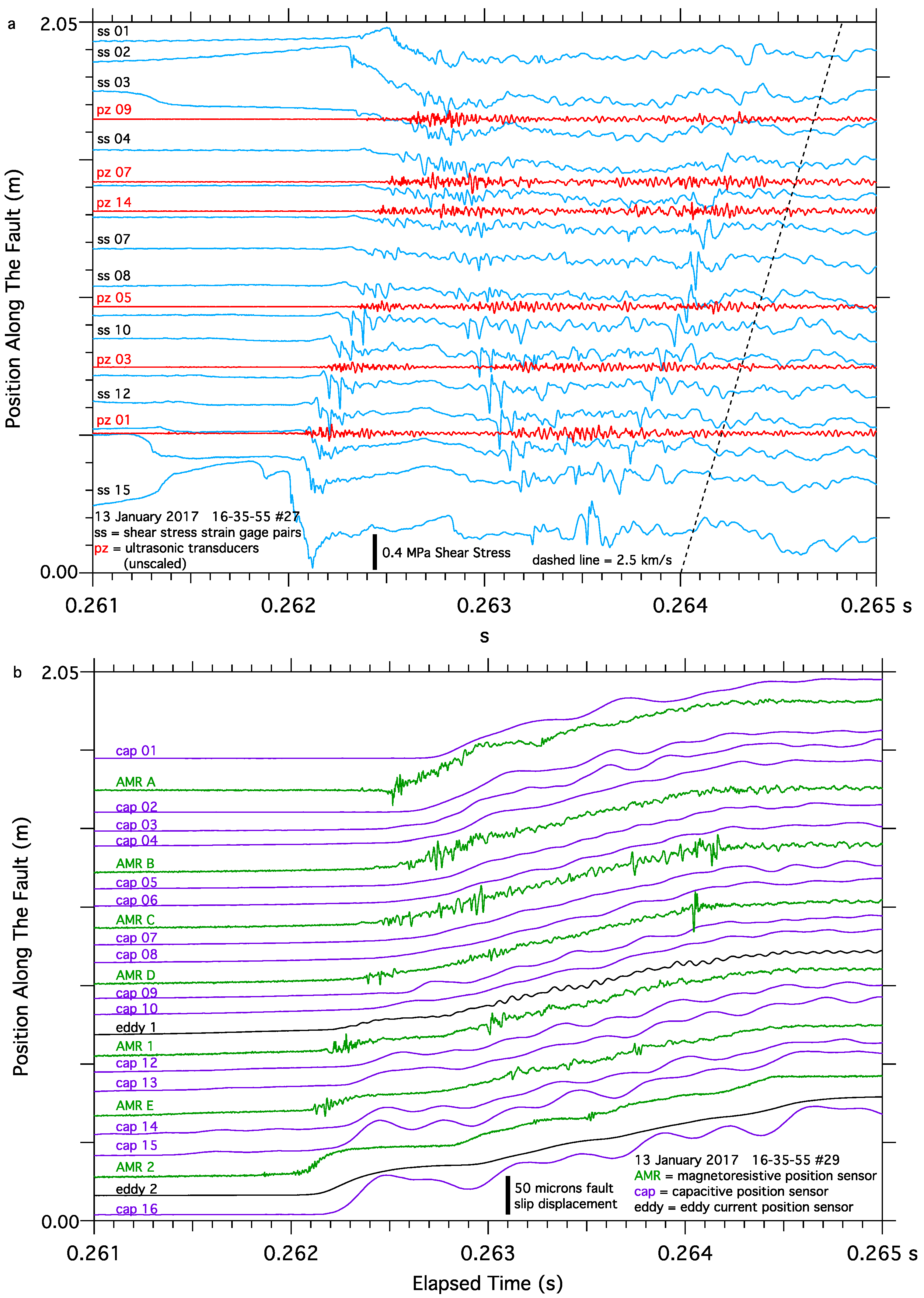
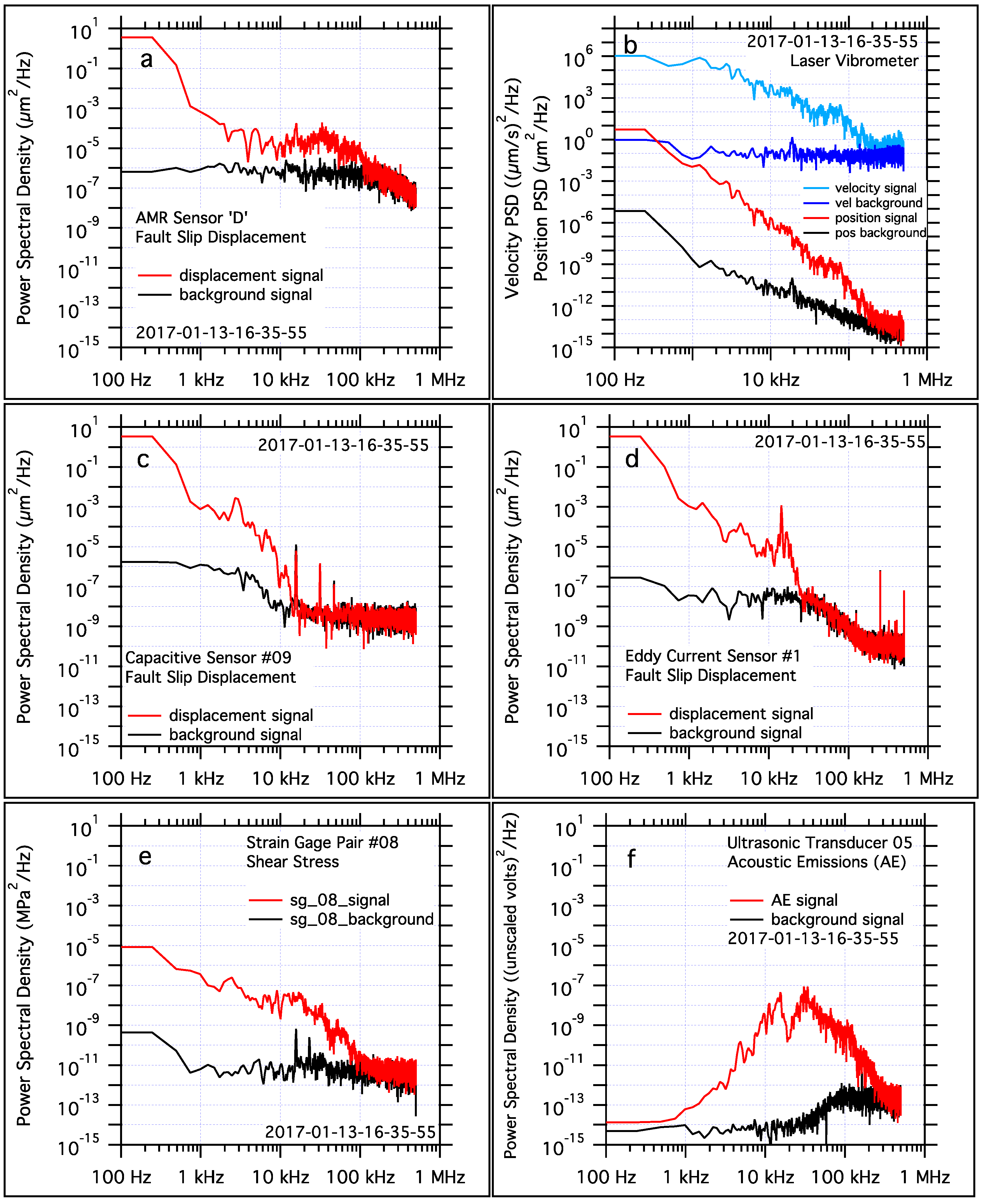
Fault slip data generated by the AMR sensor array were compared to fault slip data simultaneously generated by a variety of other slip, strain, and ultrasonic sensors deployed along the length of the 2-m fault (
Figure 4). The performance of the AMR sensors was compared directly to laser vibrometer measurements at locations near the middle and at the end of the 2-m fault (
Figure 5). An array of 15 semiconductor strain gage pairs, configured to measure shear strain/stress, are deployed along the length of the 2-m fault. The frequency response of the strain gage pairs and their signal conditioning used in these tests is DC to ≈ 100 kHz. An array of 15 Capacitec HPC-40 position sensors paired with 4100-SL signal conditioners (specified frequency response: DC to 3.1 kHz) mounted in simple cantilever style mounts, are also deployed along the length of the 2-m fault to measure fault slip. Two Micro-Epsilon U1 position sensors paired with eddyNCDT 3010 signal conditioners (specified frequency response: DC to 50 kHz) were also deployed along the 2-m fault where space permitted. The standard response of the Micro-Epsilon sensor is DC to 25 kHz, the response reported here is the result of a factory modification to the eddyNCDT 3010 hardware. The mounts used with the eddy current sensors are designed to mitigate the resonance vibrations previously observed in the capacitive sensor records. Signals captured by an array of five 1 MHz Panametrics V103-RB ultrasonic P-wave transducers with a -6 dB passband between approximately 450 kHz and 1.6 MHz and a 13 mm nominal element diameter, were also employed in the analysis of the signals generated by the AMR sensor. The ultrasonic transducers were previously deployed to capture high frequency acoustic signals related to earthquake nucleation and rupture processes [
12]. While all of the fault slip, fault velocity, and shear stress sensors are positioned within several cm of the fault trace to monitor motions along the surface fault trace, the ultrasonic transducers are positioned 20 cm from the fault trace, one half the depth of the fault, to monitor AE emanating from the entire fault plane.
Lacking specialized equipment to properly document the unanticipated, but presumed EM signals observed in these experiments, a test was devised using available equipment. One HMC1501 SOIC chip and a target magnet were glued to a single piece of epoxy glass composite prototyping board with the same 5-mm gap as if deployed on the granite samples, and employed one of the existing signal conditioning modules. This sensor was deployed at several locations along the 2-m fault, both simply resting on the sample block spanning the fault, and later, still spanning the fault, but suspended a few millimeters above the sample block attached to the same scaffold supporting the laser vibrometers. The output of this test AMR sensor should be constant since the sensor/magnet pair are attached to the same piece of epoxy fiber board and should not experience any differential motion, and that sensor assembly is either lightly resting on or simply not physically connected at all to the granite sample blocks to minimize or eliminate any signals generated by any motion or vibrations of the sample blocks or test apparatus.
4. Discussion
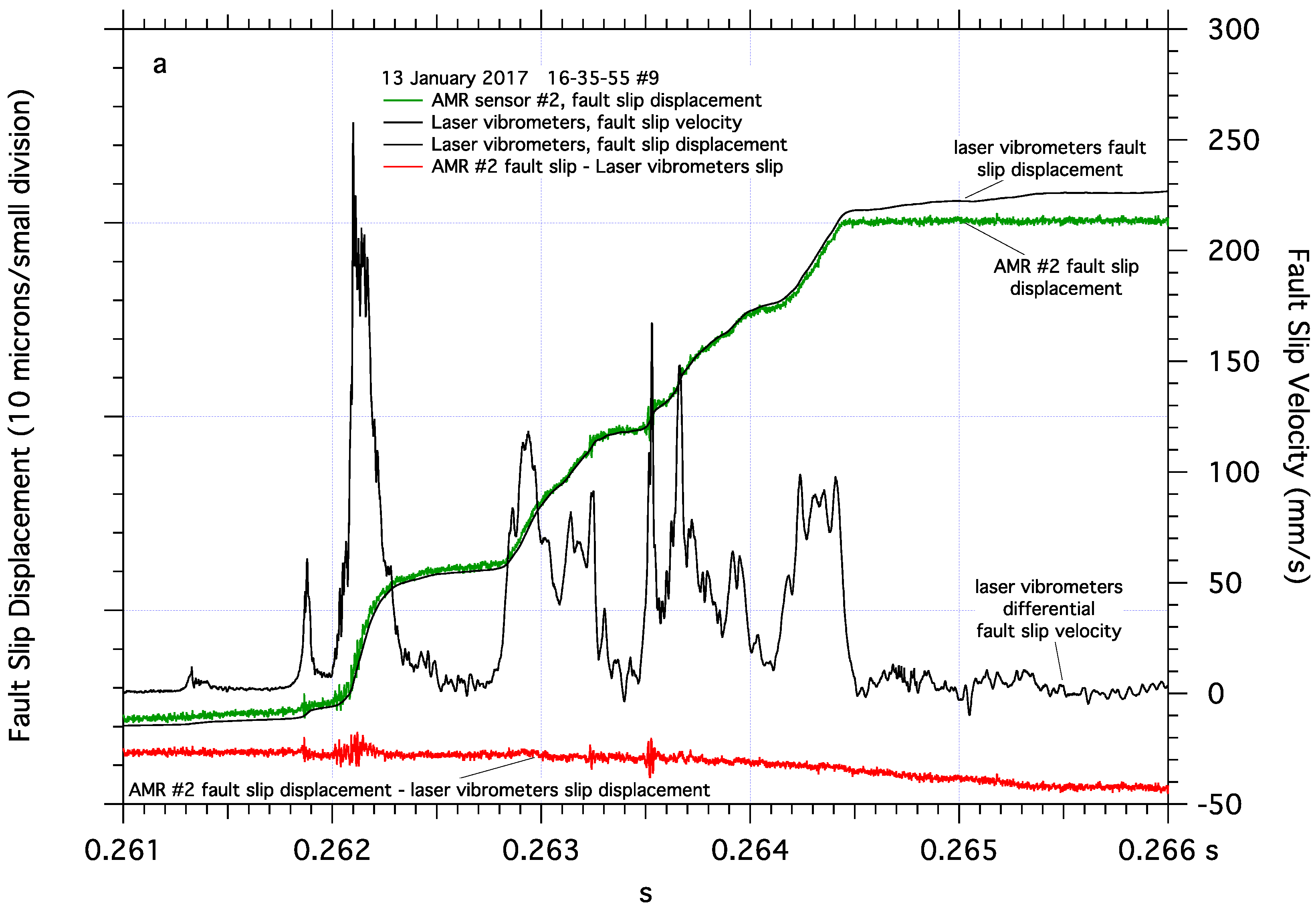
The AMR sensor described in this report is capable of acquiring detailed, accurate, and resonance free wideband measurements of dynamic fault slip displacement. Benchtop calibrations and scaling procedures for the AMR sensor described in this report can produce calibration curves with scaling errors within or below the performance specifications of other commonly used position sensors. The ability of the AMR sensor to accurately track rapid stick-slip fault motion and make accurate measurements of dynamic fault slip displacement in the lab was independently verified by the use of a pair of laser vibrometers. The laser vibrometers measured the differential fault slip velocity of the AMR sensor and its matching magnet directly, which was then integrated to fault slip displacement for a direct comparison to the AMR sensor signal. Side by side comparison of AMR sensor fault slip displacement signals to signals generated by close by capacitive and eddy current fault slip displacement sensors, also verify the performance of the AMR sensor with respect to its ability to accurately measure fault slip displacement.
The small AMR sensor package developed for these tests is a rigid, rugged, low-profile, easy to build device which facilitates its use in a variety of space sensitive scenarios. Observations in these tests show that the rigid sensor package eliminates the negative effects of sensor mount resonance, improving the quality of stick-slip fault slip data. The custom signal conditioning developed for these tests permits the sensor to be permanently bonded to the samples, and still allow for high resolution measurements while accommodating accumulating fault slip without manual re-positioning of the sensor.
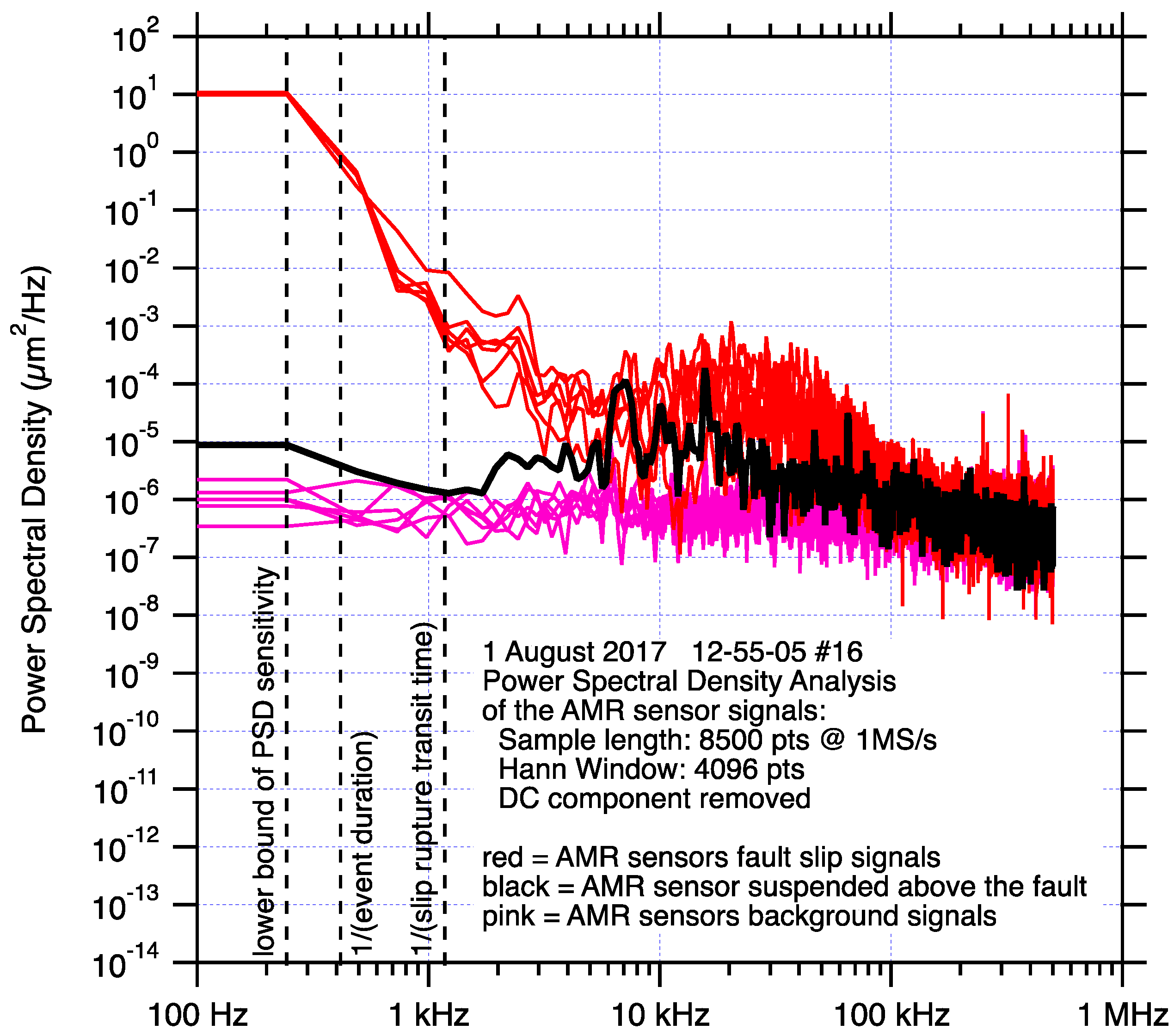
The wideband response of the AMR sensor is verified by direct comparison to simultaneous laser vibrometer measurements and PSD analysis of the fault slip displacement records generated by those two sensing technologies. PSD analysis,
Figure 12, shows that the sensor is sensitive to motion at frequencies to 100 kHz, which is comparable to the frequency response of the laser vibrometer fault slip displacement data. The discrepancy in amplitude of the high frequency signals detected by the AMR fault slip sensor vs the laser vibrometer fault slip displacement record is consistent with the difference in amplitude of the power spectra of those two sensors. The cause for the fault slip displacement amplitude discrepancy between the two sensors is unresolved at this time, though may be caused by the apparent sensitivity of the AMR sensor to fault generated EM signals, discussed later.
The small amount of fault slip detected by the AMR sensor after dynamic fault slip has ended,
Figure 6a, could be apparent slip caused by the frame of reference of the laser vibrometers. Fault motion in these tests is left lateral, which may facilitate a counter-clockwise rotation of the sample blocks. The laser vibrometers measure the motion of the AMR sensor and its target magnet relative to the floor in the lab. In contrast, the AMR sensors measure fault slip directly, referenced to the sample blocks. Counter-clockwise sample block rotation following stick-slip fault slip motion, could cause the vibrometers to register block rotation of the sensor and the target as fault motion, resulting in additional, but apparent, fault slip. Apparent slip caused by block rotation should produce the largest signals at the corners of the sample blocks, the ends of the fault, presumably locations of maximum rotation motion. Measurements of fault slip near the middle of the fault in the center of the sample blocks, shows no post stick-slip fault motion,
Figure 8a, presumably where block rotation effects would be minimized. The test apparatus resonates at approximately 425 Hz after each stick-slip event, evidenced by audible ringing and oscillations in the shear strain gage pair records, and may facilitate post slip rotation or other motion of the sample blocks. Additional measurements of the motion of the sample blocks relative to themselves, the loading frame, and the floor of the lab would be required to positively identify the source of the apparent fault slip observed in
Figure 6a.
The appearance of the high frequency fluctuations in the AMR dynamic slip records present an unanticipated, and interesting set of observations. These signals appear to be related to the high frequency, low amplitude slip pulses traveling the length of the fault as a part of the fault rupture process [
13]. If the high frequency oscillations in the AMR records represent traveling slip pulses, then perhaps they represent actual deformation near the fault. However, the amplitude of those high frequency signals in the AMR fault slip records is quite large compared to the total amount of fault slip. Fault slip displacement signals in
Figure 6a and
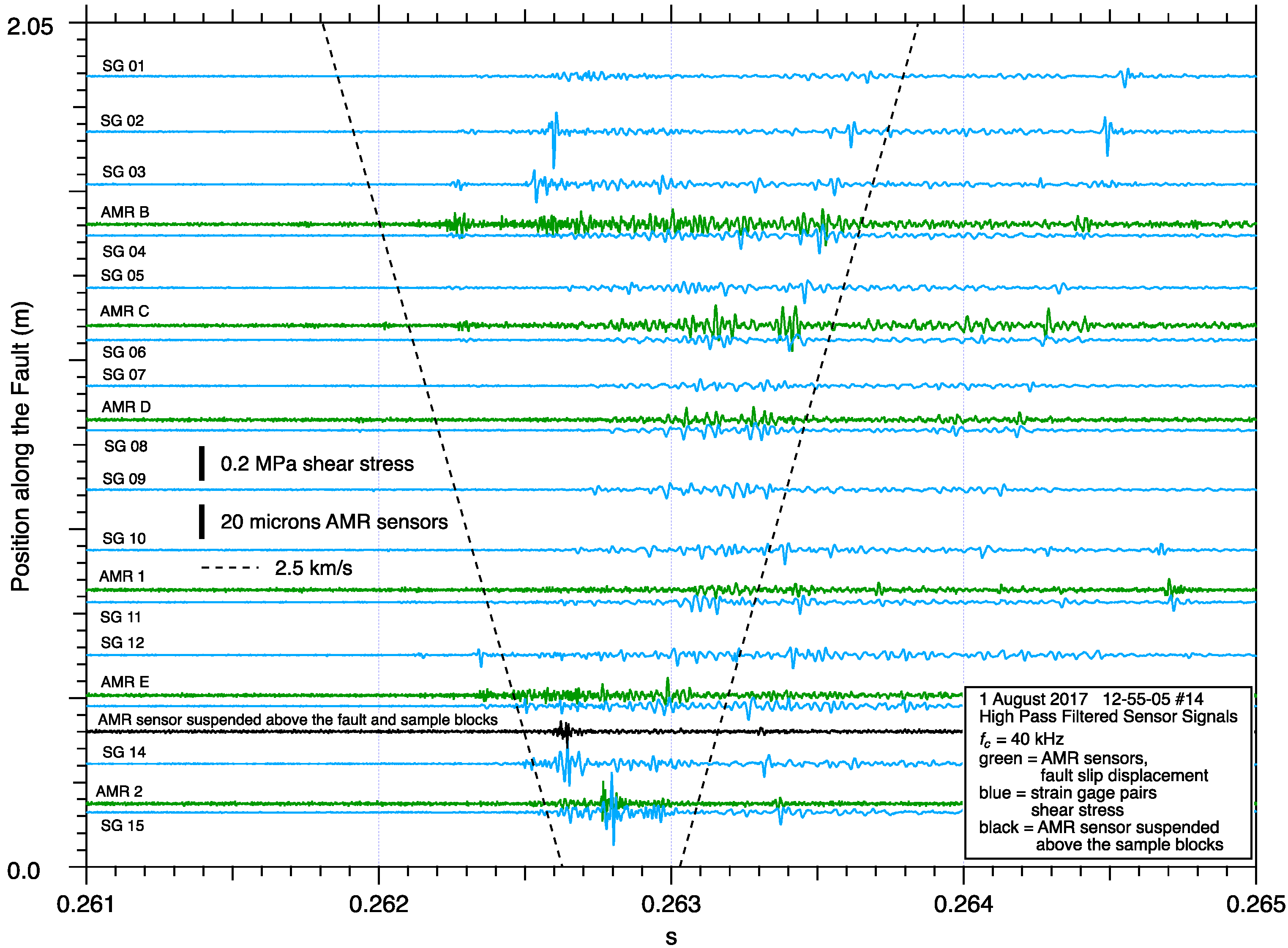
Figure 8a, as well as high pass filtered fault slip displacement data in
Figure 13 and
Figure 14, suggest that the magnitude of the high frequency fault slip signals is tens of microns of fault slip motion. Considering that total fault slip in these events was about 130 to 140 microns, the amplitude of the high frequency signals represents a significant amount of forward, and highly unlikely backward, fault motion during strike-slip fault block motion. If the high frequency fluctuations in the AMR records represent actual fault slip, with tens of microns of positive and negative fault motion, then the velocity record should show matching high frequency oscillations reflecting positive and negative velocity, but they do not. However, the laser vibrometer differential fault slip velocity signals resulting from the simultaneous tracking an AMR sensor and magnet, then integrated to fault slip displacement, do show high frequency fault motions, though with amplitudes of only a fraction of a micron, about two orders of magnitude less than the same motion detected by the AMR sensors.
If the high frequency fault slip displacement oscillations detected by the AMR sensors represent fault motion or deformation, then the coincident high frequency oscillations seen in the shear stress records could scale with that motion. Using the shear modulus of the sample rock, as well as the change in shear stress observed by the shear strain gage pairs, we can use the relation
where
G = the shear modulus of the sample,
τxy and
F/
A = shear stress,
γxy and
∆x/
l = shear strain, to roughly estimate the motion that might be expected for a given magnitude of shear stress fluctuation. The shear modulus for Sierra White granite is about 25 GPa [
67,
69], and the high pass filtered signals in
Figure 13 show shear stress oscillations with amplitudes of about 0.25 MPa. The shear stress is measured over a distance
l of about 1 cm on the sample surface, the approximate length dimension of the strain gage pair. Solving for
∆x, 0.1 microns is the approximate amplitude of shear deformation that would accompany the shear stress oscillations of the magnitude observed in these tests. While this number is consistent with the amplitude of high frequency fault slip displacement oscillations detected by the laser vibrometers, it is substantially less than the amplitude of apparent high frequency fault slip displacement oscillations measured by the AMR sensors. A traveling elastic wave related to a travelling fault rupture front would be consistent with temporal appearance of these high frequency oscillations, and the small amplitude of these oscillations determined by the laser vibrometer appears to be consistent with the modulus of the sample material and the amplitude of shear stress fluctuations related to the passing rupture front.
One possible mechanism for the high frequency signal oscillations seen in the AMR fault slip records is the generation of EM signals related to fault rupture or fault rupture propagation. The AMR sensor is a magnetic sensor, and may be sensitive to EM signals generated by the stick-slip fault motions generated in these tests. It is important to note that these tests were not designed to look for EM signals, and as such, appropriate EM sensing equipment was not deployed. The possibility that EM signals could be generated under these test conditions is not a surprise. Various mechanisms have been invoked for the generation of earthquake and volcanic EM signals [
21,
22,
23,
24,
25], including piezomagnetic and electrokinetic effects, elastic waves propagating through the Earth’s crust, and others, have been associated with the generation of EM signals. The lack of ferro-crystalline minerals or fluid saturated pore space in the granite used in these tests disqualifies both piezoresistive and electokinetic mechanisms in these tests. A propagating elastic rupture front generating triboelectric EM signals related to microcracking and rock shearing at the rupture front as the rupture front passes [
23], is a plausible mechanism for the generation of EM signals in this test configuration. In addition, these granite samples are quartz rich, which could also facilitate the generation of transient piezoelectric charge which the AMR sensors could be sensitive to.
Why some sensors deployed in these tests detect the apparent EM signals and some don’t, pose some interesting questions. For example, the AMR sensor is designed to be sensitive to magnetic fields. However, it was operated in a ‘saturating’ magnetic field of approximately 80 Gauss to in part, reduce the effects of stray magnetic fields, which might suggest that EM signals generated by faulting could be of a sufficient magnitude to be readily detectable by other means. The strain gage pairs, as well as the eddy current and capacitive position sensors all generate signal fluctuations when a hand-held magnet is passed close by those sensors, suggesting that their signals may all be influenced by transient EM signals. The semiconductor strain gages themselves apparently show no magnetostriction and very little magnetoresistive effect [
70], though their lead wirers could act as small antenna receptive to EM signals. Indeed, lead wire weaving techniques and non-inductive foil strain gages exist that are designed specifically to minimize noise pick-up from EM signals. The use of non-inductive strain gages and better shielded lead wires in future tests could help better identify the source of higher frequency oscillations observed in the strain gage pairs in these tests. The use of AC excitation (vs. DC excitation as in these tests) with the existing strain gage pairs to reduce EM sensitivity, or the deployment of optical strain gages which are insensitive to EM signals, may offer insights, though these technologies are both bandwidth limited and best suited for quasi-static strain measurements. The relatively low bandwidth of the capacitive position sensors appears to render them incapable of generating signals related to any higher frequency EM signals. The eddy current sensors which should have a 50-kHz signal bandwidth, and appear to be sensitive to a close by magnet, do not detect these apparent EM signals. The PSD spectral analysis of the eddy current sensors suggest that their actual frequency response is much less than 50-kHz, possibly rendering then insensitive to EM signals generated during these tests. The ultrasonic transducers did not appear to be sensitive to the presence of a close by magnet and suggests that those sensors are only responding to ultrasonic acoustic emissions generated during dynamic rupture. Testing currently beyond the capabilities of this lab would be required to accurately characterize the nature of any EM emissions generated in this testing apparatus, and its effect on the sensors used in these tests.
The stick-slip data collected using the AMR sensor/magnet pair that was suspended above the sample blocks (
Figure 14), show high frequency oscillating signals comparable to AMR sensor/magnet pairs that were attached to the sample blocks during stick-slip events. Spectral analysis of the suspended AMR sensor vs glued down AMR sensors,
Figure 15, also shows that the two signals are comparable, though the suspended sensors spectral amplitude is a bit less than that of the glued down sensors, it is still above the noise level of both sensors and suggests that at least some of the high frequency AMR fault slip displacement signal is derived from possible EM emissions from the sample blocks during dynamic stick-slip motion. High pass filtered laser vibrometer fault slip displacement data detect the high frequency motion of the glued down AMR sensors, but about two orders of magnitude less than what the AMR sensors detect, suggests that the while AMR sensors are clearly responding accurately to fault slip displacement, they also have some sensitivity to possible EM signals related to fault slip processes.
To fully understand the source physics of EM signals observed in tests like these, appropriate sensors, experimental techniques, and shielding from extraneous sources of EM energy are all required. Future experiments should employ sensors to quantify any quasi-static or wideband transient EM signals that may be generated during the generation of small strike-slip earthquakes in the lab. The use of sensors insensitive to EM signals to measure fault slip, fault slip velocity, strain patterns and accelerations along the fault, would all contribute to the understanding of the source of the apparent EM signals reported here. Specific to the AMR sensor, using more powerful target magnets may improve the AMR sensors ability to reject extraneous signals, though, how stronger magnets might adversely affect other close by sensors would need to be considered. Small scale tests using samples with varying amounts of quartz and silica, and similarly varying piezoelectric effects, may be insightful as well. While granite is one of the more silica rich igneous rock types, experiments using diorite, gabbro or peridotite with progressively less silica content, may provide helpful insights into coseismic EM emissions.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















