On-Tree Mango Fruit Size Estimation Using RGB-D Images



Abstract
1. Introduction
- Reference scale: A reference object with known size may be included in the image, allowing for the estimation of size of target objects by referring to the reference scale. This method is simple but requires the reference object to be placed on the same plane as the target, which makes it impractical. For example, Cheng et al. [21] utilised 50 mm diameter white and red spheres placed on trees in the estimation of apple sizes in an orchard, with accurate estimation of size only for the fruit close to the reference objects.
- Ultrasonics: Murali and Won Suk [22] used ultrasonic sensors and machine vision techniques to estimate citrus fruit size on trees. This work employed four ultrasonic sensors to estimate an average distance between the tree and the camera for calculation of fruit size, and the maximum one of estimated diameters of fruit in images was used to represent the fruit size. An unacceptably large RMSE = 19 mm was obtained, with error ascribed ultrasonic depth inaccuracy, clustering of fruits, and variable illumination.
- Stereo or multi-view imaging: in stereo imaging, spatial displacement of images from a pair of cameras is converted to real distance by triangulation. Although many algorithms have been proposed, evaluating stereo imaging depth still faces difficulties in matching correspondence points due to occlusion, similarity, variation in light levels, imaging noise and calibration errors [23,24,25]. Application to fruit within a mango canopy faces even more difficulties, as complex canopy geometry can cause failures in finding stereo pairs [16]. For example, Font et al. [26] proposed a stereovision system for automated fruit harvesting with reported measurement errors of up to 76 mm in distance estimation at a camera-to-fruit distance of 2025 mm and up to 5.9 mm in fruit diameter estimation.
- Laser rangefinder: laser distance and LiDAR units emit pulsed laser beams, with measurement of the round-trip Time of Flight (ToF) of light offering precise distance information [27,28]. A ToF point distance measurement of a specific fruit could be associated with the camera image of that fruit. LiDAR allows for whole canopy imaging and are insensitive to sunlight, but spatial resolution at on-the-go speed of movement is low, in terms of localization of fruit. LiDAR units are also effectively an order of magnitude higher in price than the other sensors under consideration. Single point laser rangefinders offer a cost-effective access to ToF technology.
- ToF-based RGB-D camera: ToF cameras assess distance to all image pixel points by emission of a cone of modulated continuous light-wave and measurement of the phase shift of the received light-wave to obtain the travel time of light [28,29]. In this kind of camera, each detector pixel performs demodulation of the received signal independently, and therefore the camera is capable of measuring the depth from a whole field of view simultaneously. Post-image processing techniques can correspond depth and RGB information at a pixel level, although RGB-D cameras typically have a relatively low spatial resolution. Several commercial RGB-D cameras are available on the market. The low cost Microsoft Kinect V1 RGB-D camera was used for plant phenotyping by Paulus et al. [30] and apple fruit localization within a tree canopy [31], and the Kinect V2 camera was used in measure of structural parameters of cauliflower by Andújar et al. [32].
2. Materials and Methods
2.1. Distance Measurement Technology—A Description
2.2. Distance Measurement Accuracy and Precision
2.3. RGB-D Image Calibration and Registration
2.4. In Orchard Activity
2.5. Cascade Fruit Detection
2.6. Pixel Based Segmentation for Background Removal
2.7. Stalk Removal
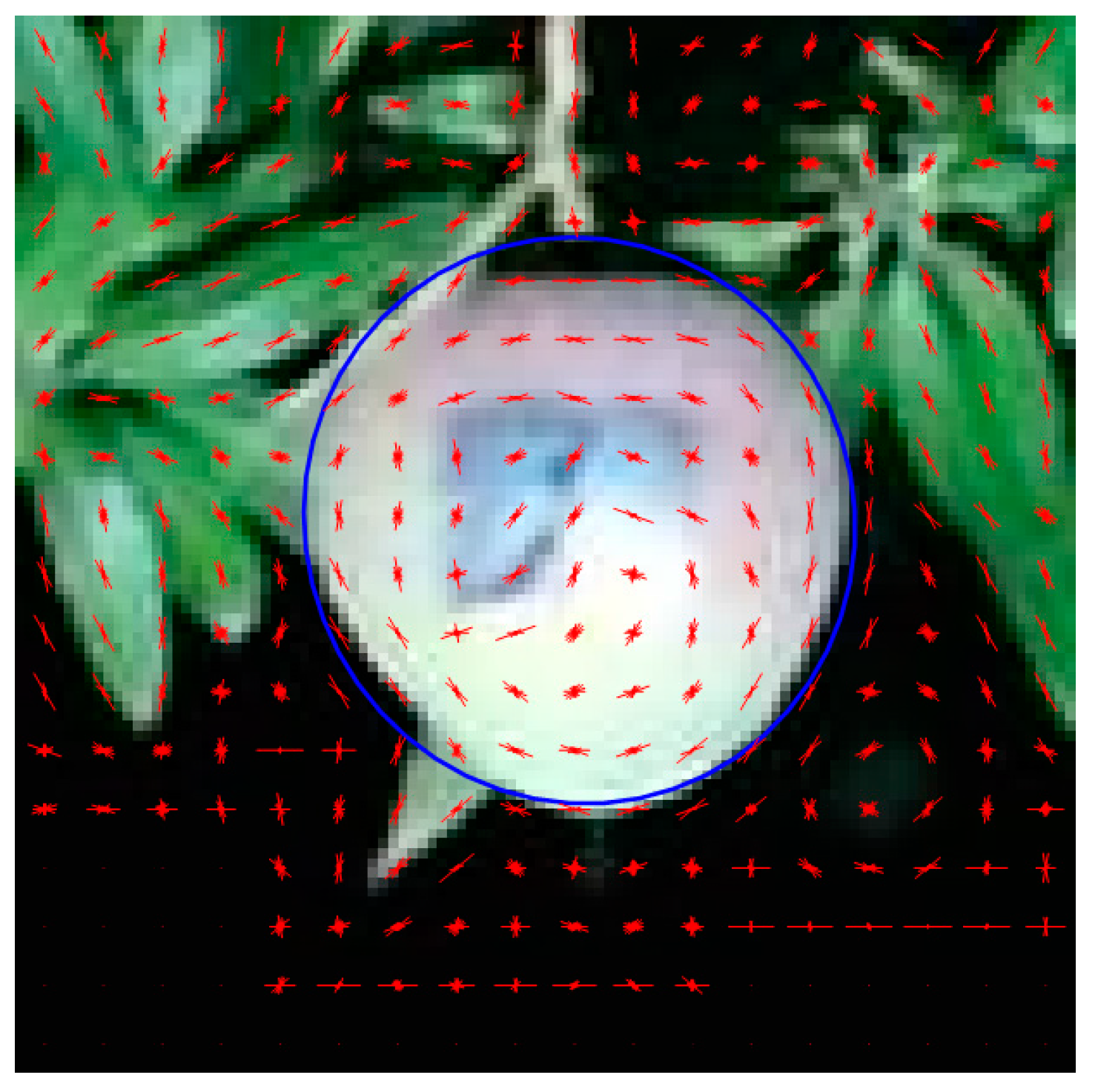
2.8. Ellipse Fitting for Recognition of Complete Fruit
- Ellipse area (): a whole fruit at a camera distance of around 2 m should have an area of 1000 to 8000 pixels. Smaller patches could be background or incomplete fruit, while larger patches could be clustered fruit.
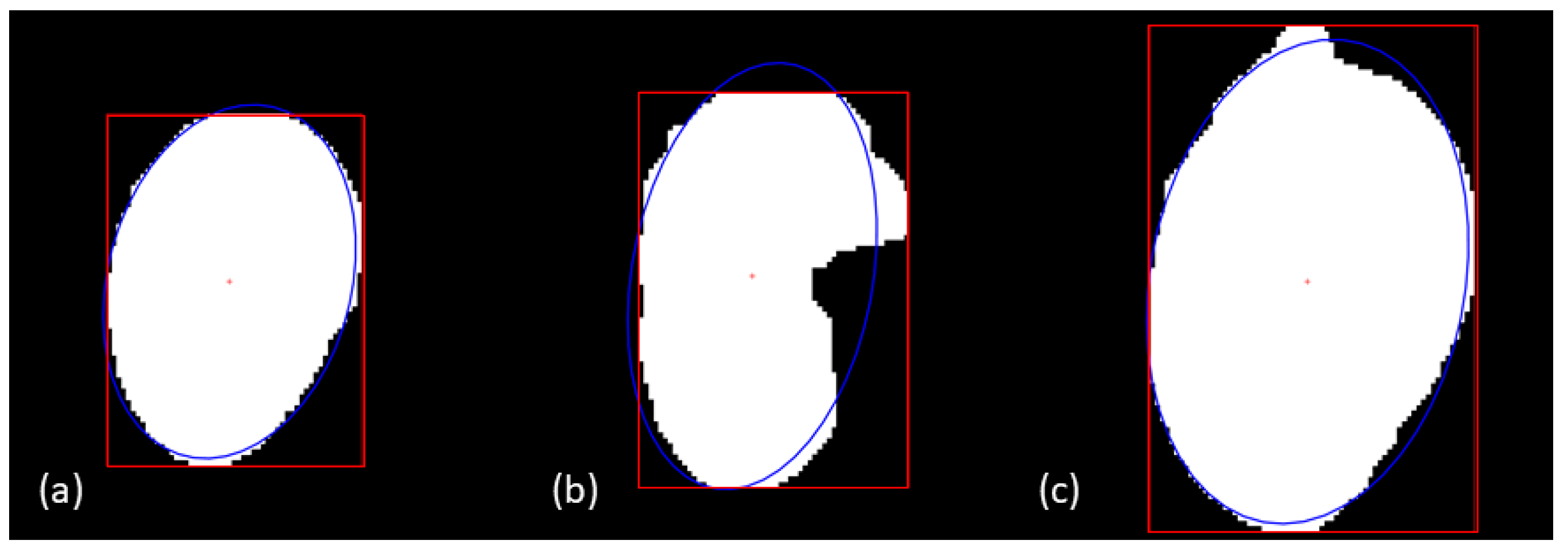
- Area ratio (): the ratio of real connected component (a segmentation result of a fruit) size () to calculated ellipse area based on the fitted ellipse major axis and minor axis , defined by:The value of r should be >0.97 if a whole mango is imaged, with the mango filling the detection ellipse fully, while stalks or leaves do not.
- Eccentricity (): the ellipse encapsulating a mango fruit is closer to a circle, leading to a relatively small than values for non-mango objects, such as leaves or fruit clusters. A connected component with was rejected.
- Bounding box length versus ellipse major length: the length of a bounding box just encapsulating the fruit was used in estimation of the fruit length. The major axis of the fitted ellipse is usually larger than the length of the bounding box (Figure 2), however, thick stalk ends that were not removed by the line filter could result in an overestimation of fruit length. Therefore, if the length of bounding box was 4 pixels larger than the ellipse major axis, the object was excluded from size estimation.
2.9. Fruit Size Estimation
2.10. Workflow of Proposed Method
3. Results
3.1. Distance Sensor Comparison
3.2. Fruit Detection
3.3. Estimation of Fruit Dimensions
3.4. Sampling Considerations
4. Discussion
4.1. Choice of Distance Sensor
4.2. Fruit Detection
4.3. Estimation of Fruit Dimensions
4.4. Sampling Considerations
4.5. Implementation
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jenni, S.; Stewart, K.A.; Bourgeois, G.; Cloutier, D.C. Predicting yield and time to maturity of muskmelons from weather and crop observations. J. Am. Soc. Hortic. Sci. 1998, 123, 195–201. [Google Scholar]
- Jha, S.; Kingsly, A.; Chopra, S. Physical and mechanical properties of mango during growth and storage for determination of maturity. J. Food Eng. 2006, 72, 73–76. [Google Scholar] [CrossRef]
- Mitchell, P. Pear fruit growth and the use of diameter to estimate fruit volume and weight. HortScience 1986, 21, 1003–1005. [Google Scholar]
- Moreda, G.P.; Ortiz-Cañavate, J.; García-Ramos, F.J.; Ruiz-Altisent, M. Non-destructive technologies for fruit and vegetable size determination—A review. J. Food Eng. 2009, 92, 119–136. [Google Scholar] [CrossRef]
- Jenni, S.; Stewart, K.A.; Bourgeois, G.; Cloutier, D.C. Nondestructive volume estimation for growth analysis of eastern-type muskmelon ovaries. HortScience 1996, 31, 1236. [Google Scholar]
- Ngouajio, M.; Kirk, W.; Goldy, R. A simple model for rapid and nondestructive estimation of bell pepper fruit volume. HortScience 2003, 38, 509–511. [Google Scholar]
- Léchaudel, M.; Joas, J. An overview of preharvest factors influencing mango fruit growth, quality and postharvest behaviour. Braz. J. Plant Physiol. 2007, 19, 287–298. [Google Scholar] [CrossRef]
- Anderson, N.T.; Subedi, P.P.; Walsh, K.B. Manipulation of mango fruit dry matter content to improve eating quality. Sci. Hortic. 2017, 226, 316–321. [Google Scholar] [CrossRef]
- Kernot, I.; Meurant, N.; Holmes, R.; MacLeod, N.; Fullelove, G.; Bally, I. Mango Information Kit; Queensland Department of Primary Industries: Brisbane, Australia, 1999. [Google Scholar]
- Spreer, W.; Müller, J. Estimating the mass of mango fruit (Mangifera indica, cv. Chok Anan) from its geometric dimensions by optical measurement. Comput. Electron. Agric. 2011, 75, 125–131. [Google Scholar]
- Yimyam, P.; Chalidabhongse, T.; Sirisomboon, P.; Boonmung, S. Physical Properties Analysis of Mango Using Computer Vision. In Proceedings of the 2005 International Conference on Control, Automation and Systems (ICCAS), Gyeonggi-Do, Korea, 2–5 June 2005. [Google Scholar]
- Chalidabhongse, T.; Yimyam, P.; Sirisomboon, P. 2D/3D Vision-Based Mango’s Feature Extraction and Sorting. In Proceedings of the 9th International Conference on Control, Automation, Robotics and Vision, Singapore, 5–8 December 2006; pp. 1–6. [Google Scholar]
- Gongal, A.; Amatya, S.; Karkee, M.; Zhang, Q.; Lewis, K. Sensors and systems for fruit detection and localization: A review. Comput. Electron. Agric. 2015, 116, 8–19. [Google Scholar] [CrossRef]
- Payne, A.; Walsh, K. Machine vision in estimation of fruit crop yield. In Plant Image Analysis: Fundamentals and Applications; CRC Press: Boca Raton, FL, USA, 2014; pp. 329–374. [Google Scholar]
- Qureshi, W.S.; Payne, A.; Walsh, K.B.; Linker, R.; Cohen, O.; Dailey, M.N. Machine vision for counting fruit on mango tree canopies. Precis. Agric. 2017, 18, 224–244. [Google Scholar] [CrossRef]
- Stein, M.; Bargoti, S.; Underwood, J. Image Based Mango Fruit Detection, Localisation and Yield Estimation Using Multiple View Geometry. Sensors 2016, 16, 1915. [Google Scholar] [CrossRef] [PubMed]
- Sa, I.; Ge, Z.; Dayoub, F.; Upcroft, B.; Perez, T.; McCool, C. DeepFruits: A Fruit Detection System Using Deep Neural Networks. Sensors 2016, 16, 1222. [Google Scholar] [CrossRef] [PubMed]
- Payne, A.; Walsh, K.; Subedi, P.; Jarvis, D. Estimating mango crop yield using image analysis using fruit at ‘stone hardening’ stage and night time imaging. Comput. Electron. Agric. 2014, 100, 160–167. [Google Scholar] [CrossRef]
- Payne, A.B.; Walsh, K.B.; Subedi, P.P.; Jarvis, D. Estimation of mango crop yield using image analysis—Segmentation method. Comput. Electron. Agric. 2013, 91, 57–64. [Google Scholar] [CrossRef]
- Dalal, N.; Triggs, B. Histograms of Oriented Gradients for Human Detection. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Diego, CA, USA, 20–25 June 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 886–893. [Google Scholar]
- Cheng, H.; Damerow, L.; Sun, Y.; Blanke, M. Early Yield Prediction Using Image Analysis of Apple Fruit and Tree Canopy Features with Neural Networks. J. Imaging 2017, 3, 6. [Google Scholar] [CrossRef]
- Regunathan, M.; Lee, W.S. Citrus Fruit Identification and Size Determination Using Machine Vision and Ultrasonic Sensors. In Proceedings of the 2005 ASAE Annual International Meeting, Tampa, FL, USA, 17–20 July 2005. [Google Scholar]
- Seitz, S.M.; Curless, B.; Diebel, J.; Scharstein, D.; Szeliski, R. A Comparison and Evaluation of Multi-View Stereo Reconstruction Algorithms. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006; pp. 519–528. [Google Scholar]
- Kytö, M.; Nuutinen, M.; Oittinen, P. Method for Measuring Stereo Camera Depth Accuracy Based on Stereoscopic Vision; IS&T/SPIE Electronic Imaging; International Society for Optics and Photonics: San Francisco, CA, USA, 2011. [Google Scholar]
- Yang, Q. Stereo Matching Using Tree Filtering. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 834–846. [Google Scholar] [CrossRef] [PubMed]
- Font, D.; Pallejà, T.; Tresanchez, M.; Runcan, D.; Moreno, J.; Martínez, D.; Teixidó, M.; Palacín, J. A Proposal for Automatic Fruit Harvesting by Combining a Low Cost Stereovision Camera and a Robotic Arm. Sensors 2014, 14, 11557–11579. [Google Scholar] [CrossRef] [PubMed]
- Kazmi, W.; Foix, S.; Alenyà, G.; Andersen, H.J. Indoor and outdoor depth imaging of leaves with time-of-flight and stereo vision sensors: Analysis and comparison. ISPRS J. Photogramm. Remote Sens. 2014, 88, 128–146. [Google Scholar] [CrossRef]
- Horaud, R.; Hansard, M.; Evangelidis, G.; Ménier, C. An overview of depth cameras and range scanners based on time-of-flight technologies. Mach. Vis. Appl. 2016, 27, 1005–1020. [Google Scholar] [CrossRef]
- Feigin, M.; Bhandari, A.; Izadi, S.; Rhemann, C.; Schmidt, M.; Raskar, R. Resolving multipath interference in kinect: An inverse problem approach. IEEE Sens. J. 2015, 16, 3419–3427. [Google Scholar] [CrossRef]
- Paulus, S.; Behmann, J.; Mahlein, A.-K.; Plümer, L.; Kuhlmann, H. Low-Cost 3D Systems Suitable Tools for Plant Phenotyping. Sensors 2014, 14, 3001–3018. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, T.T.; Vandevoorde, K.; Wouters, N.; Kayacan, E.; De Baerdemaeker, J.G.; Saeys, W. Detection of red and bicoloured apples on tree with an RGB-D camera. Biosyst. Eng. 2016, 146, 33–44. [Google Scholar] [CrossRef]
- Andújar, D.; Ribeiro, A.; Fernández-Quintanilla, C.; Dorado, J. Using depth cameras to extract structural parameters to assess the growth state and yield of cauliflower crops. Comput. Electron. Agric. 2016, 122, 67–73. [Google Scholar] [CrossRef]
- McCool, C.; Sa, I.; Dayoub, F.; Lehnert, C.; Perez, T.; Upcroft, B. Visual Detection of Occluded Crop: For Automated Harvesting. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 2506–2512. [Google Scholar]
- Zhu, Q.; Yeh, M.-C.; Cheng, K.-T.; Avidan, S. Fast Human Detection Using a Cascade of Histograms of Oriented Gradients. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, New York, NY, USA, 17–22 June 2006; pp. 1491–1498. [Google Scholar]
- Lachat, E.; Macher, H.; Landes, T.; Grussenmeyer, P. Assessment and calibration of a RGB-D camera (kinect v2 sensor) towards a potential use for close-range 3D modeling. Remote Sens. 2015, 7, 13070–13097. [Google Scholar] [CrossRef]
- Pagliari, D.; Pinto, L. Calibration of kinect for xbox one and comparison between the two generations of Microsoft sensors. Sensors 2015, 15, 27569–27589. [Google Scholar] [CrossRef] [PubMed]
- Fankhauser, P.; Bloesch, M.; Rodriguez, D.; Kaestner, R.; Hutter, M.; Siegwart, R. Kinect v2 for Mobile Robot Navigation: Evaluation and Modeling. In Proceedings of the International Conference on Advanced Robotics (ICAR), Istanbul, Turkey, 27–31 July 2015; pp. 388–394. [Google Scholar]
- Sarbolandi, H.; Lefloch, D.; Kolb, A. Kinect range sensing: Structured-light versus Time-of-Flight Kinect. Comput. Vis. Image Underst. 2015, 139, 1–20. [Google Scholar] [CrossRef]
- Almeida, L.; Vasconcelos, F.; Barreto, J.; Menezes, P.; Dias, J. On-line incremental 3D human body reconstruction for HMI or AR applications. In Field Robotics; World Scientific: Singapore, 2011; pp. 355–362. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. Automatica 1975, 11, 23–27. [Google Scholar] [CrossRef]
- Linker, R.; Cohen, O.; Naor, A. Determination of the number of green apples in RGB images recorded in orchards. Comput. Electron. Agric. 2012, 81, 45–57. [Google Scholar] [CrossRef]
- Kilian, J. Simple image analysis by moments. In OpenCV Library Documentation. Available online: https://www.scribd.com/document/39759766/Simple-Image-Analysis-by-Moments (accessed on 27 November 2017).
- Voss, K.; Suesse, H.; Neubauer, R. Moment-Based Invariant Fitting of Elliptical Segments. In Proceedings of the International Conference on Computer Analysis of Images and Patterns, Prague, Czech Republic, 6–8 September 1995; Springer: Berlin, Germany, 1995; pp. 562–567. [Google Scholar]
- Rosin, P.L. Measuring Shape: Ellipticity, Rectangularity, and Triangularity. In Proceedings of the 15th International Conference on Pattern Recognition, Barcelona, Spain, 3–7 September 2000; IEEE: Piscataway, NJ, USA, 2000; pp. 952–955. [Google Scholar]
- Stojmenovic, M.; Nayak, A. Direct Ellipse Fitting and Measuring Based on Shape Boundaries. In Proceedings of the Pacific-Rim Symposium on Image and Video Technology, Santiago de chile, Chile, 17–19 December 2007; Springer: Berlin, Germany, 2007; pp. 221–235. [Google Scholar]
- Corti, A.; Giancola, S.; Mainetti, G.; Sala, R. A metrological characterization of the Kinect V2 time-of-flight camera. Robot. Auton. Syst. 2016, 75 Pt B, 584–594. [Google Scholar] [CrossRef]
- Zude, M.; Pflanz, M.; Spinelli, L.; Dosche, C.; Torricelli, A. Non-destructive analysis of anthocyanins in cherries by means of Lambert–Beer and multivariate regression based on spectroscopy and scatter correction using time-resolved analysis. J. Food Eng. 2011, 103, 68–75. [Google Scholar] [CrossRef]
- Sengupta, S.; Lee, W.S. Identification and determination of the number of immature green citrus fruit in a canopy under different ambient light conditions. Biosyst. Eng. 2014, 117, 51–61. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RGB Camera | ToF Camera | |
|---|---|---|
| Resolution (pixels) | 1920 × 1080 | 512 × 424 |
| Sensor size (μm) | 3.1 | 10 |
| Focal length x-axis (mm) | 3.2813 | 3.6413 |
| Focal length y-axis (mm) | 3.5157 | 3.9029 |
| Principal Point x (pixel) | 965.112 | 263.852 |
| Principal Point y (pixel) | 583.268 | 225.717 |
| K1 of Radial distortion | 9.3792 × 10−5 | 9.7968 × 10−5 |
| K2 of Radial distortion | −7.5342 × 10−8 | −1.9084 × 10−7 |
| Criteria | Ceramic | PFTE | Fruit | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Zed | Leica | Kinect | Zed | Leica | Kinect | Zed | Leica | Kinect | |
| R2 | 0.998 | 1.000 | 1.000 | 0.998 | 1.000 | 1.000 | 0.997 | 1.000 | 1.000 |
| Slope | 0.929 | 0.999 | 1.004 | 0.907 | 0.999 | 1.004 | 0.923 | 1.000 | 1.005 |
| Bias (mm) | −69.3 | −0.3 | 19.1 | −62.8 | 4.5 | 31.1 | −38.7 | 6.7 | 33.1 |
| RMSE-bc (mm) | 126.9 | 2.0 | 8.4 | 159.5 | 2.2 | 8.2 | 155.6 | 2.4 | 11.0 |
| Total Detection | True Positives | False Positives | Precision (%) | |
|---|---|---|---|---|
| Cascade detection | 435 | 353 | 82 | 81.1 |
| Ellipse fitting | 90 | 90 | 0 | 100 |
| Position | n | Mean (g) | SD (g) | Max. (g) | Min. (g) |
|---|---|---|---|---|---|
| Outer canopy | 72 | 433 | 82.9 | 585 | 123 |
| In between | 31 | 421 | 75.8 | 560 | 222 |
| Inside canopy | 33 | 391 | 97.1 | 567 | 134 |
| Overall | 136 | 420 | 86.2 | 585 | 123 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Walsh, K.B.; Verma, B. On-Tree Mango Fruit Size Estimation Using RGB-D Images. Sensors 2017, 17, 2738. https://doi.org/10.3390/s17122738
Wang Z, Walsh KB, Verma B. On-Tree Mango Fruit Size Estimation Using RGB-D Images. Sensors. 2017; 17(12):2738. https://doi.org/10.3390/s17122738
Chicago/Turabian StyleWang, Zhenglin, Kerry B. Walsh, and Brijesh Verma. 2017. "On-Tree Mango Fruit Size Estimation Using RGB-D Images" Sensors 17, no. 12: 2738. https://doi.org/10.3390/s17122738
APA StyleWang, Z., Walsh, K. B., & Verma, B. (2017). On-Tree Mango Fruit Size Estimation Using RGB-D Images. Sensors, 17(12), 2738. https://doi.org/10.3390/s17122738