Robust Vehicle Detection in Aerial Images Based on Cascaded Convolutional Neural Networks


Abstract
1. Introduction
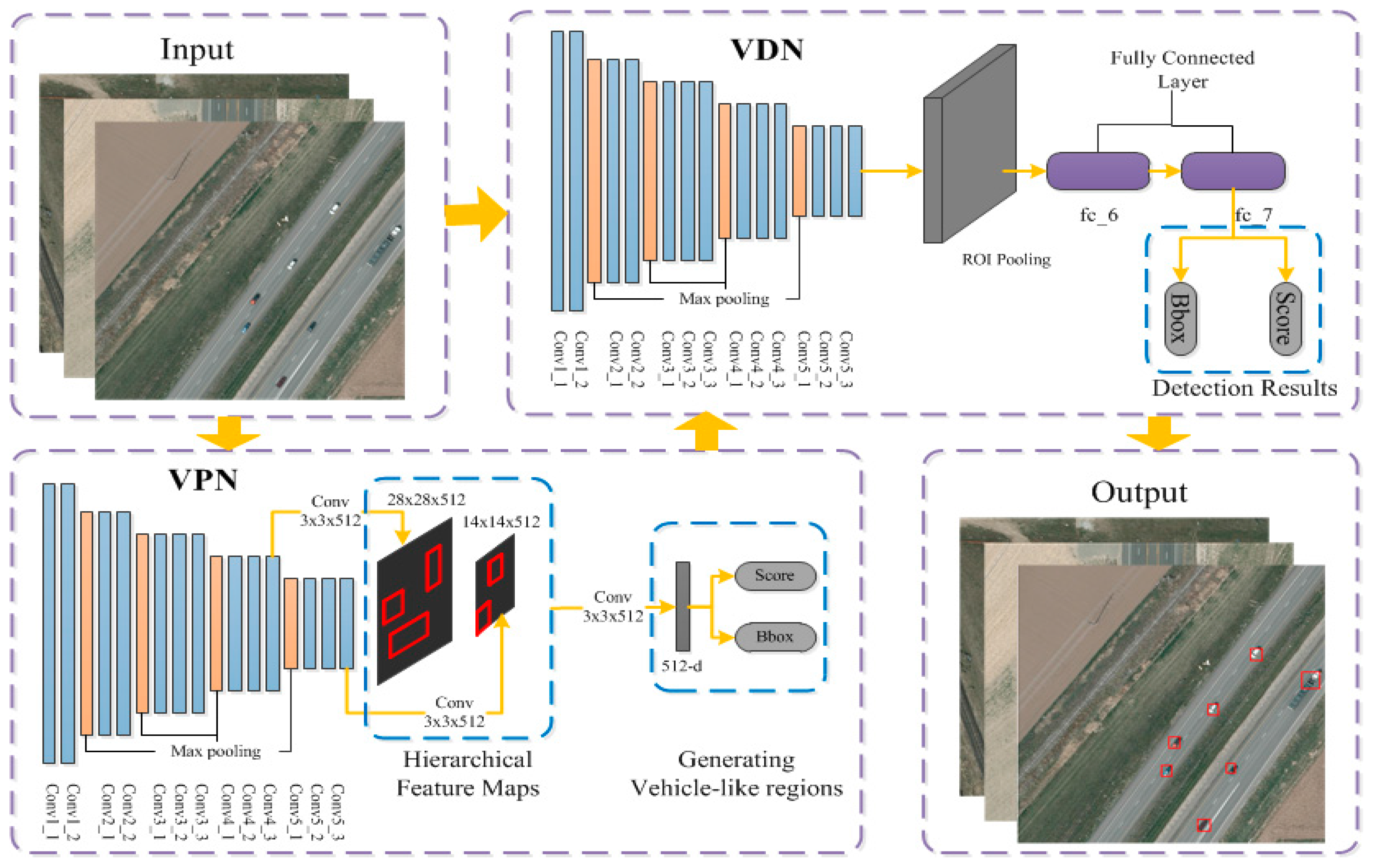
- A fast and accurate detection model is designed for vehicle detection in aerial images, which is different from the traditional sliding-window-based model and the recent CNN-based model. Our model is a cascaded architecture which incorporates two independent CNNs: the first is employed to generate vehicle-like regions, and the second is a specific-category detector which makes a final decision.
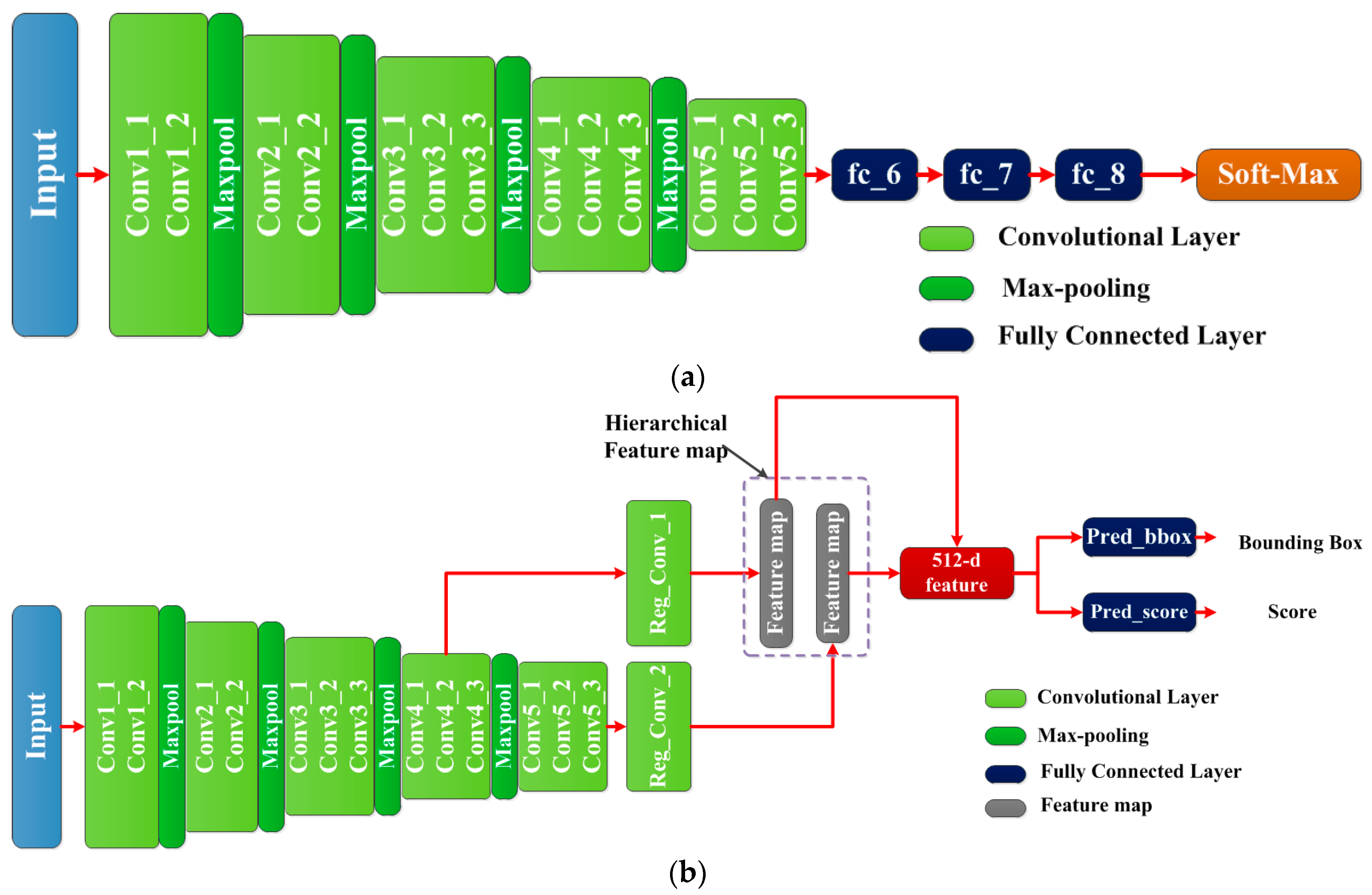
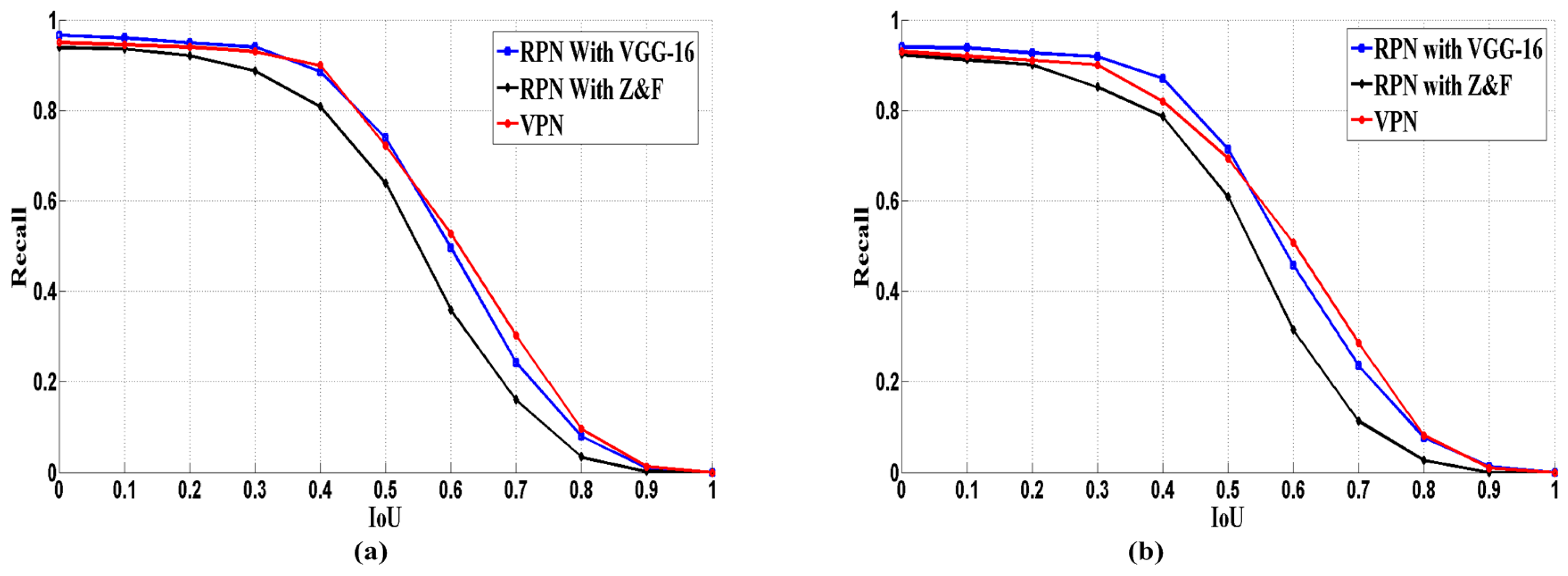
- The VPN is proposed to extract vehicle-like regions. Unlike the RPN that uses only one feature map, the proposed VPN combines multi-feature maps of different size and hierarchy for generating better vehicle-like regions. Actually, the proposed VPN takes effect on other categories as well, especially for the small targets in aerial image.
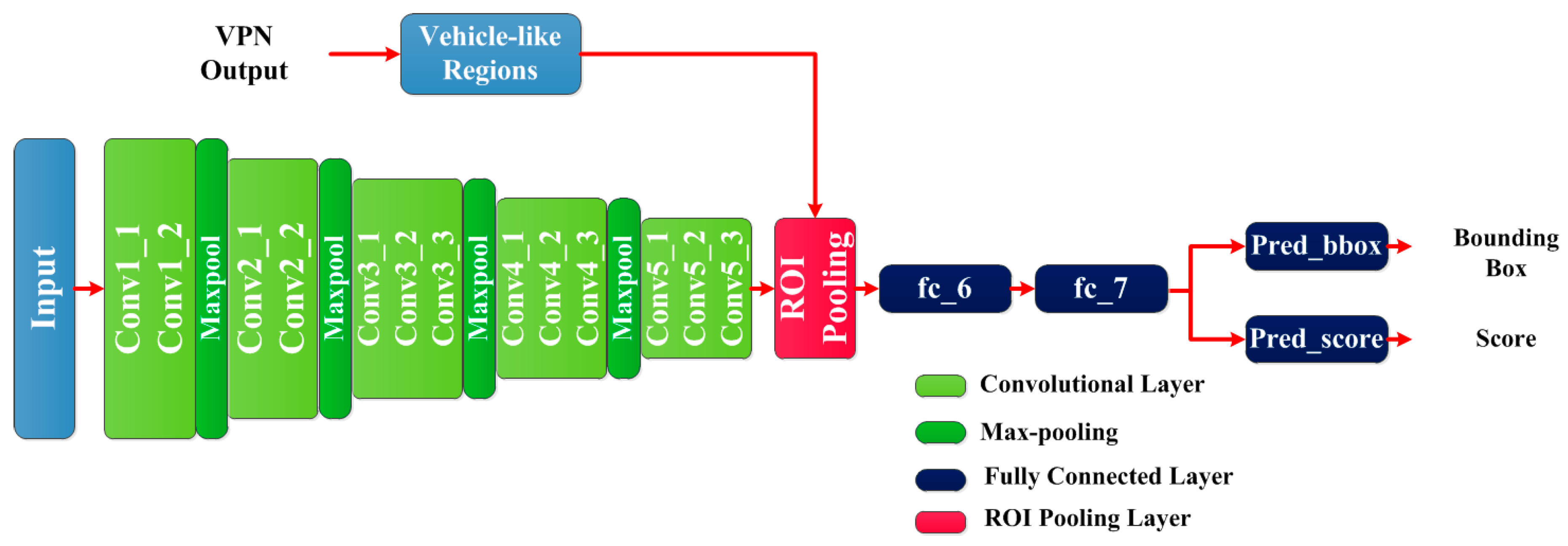
- A category-specific detector named VDN is developed, which can detect the various types of vehicles in aerial images. Additionally, unlike the Faster R-CNN which employs two-stage alternative training to share some convolutional layers, our VDN and VPN are trained independently once to increase training efficiency. This also avoids re-training the unshared layers that exist in the two networks. The VDN can be easily transferred to other target detection tasks.
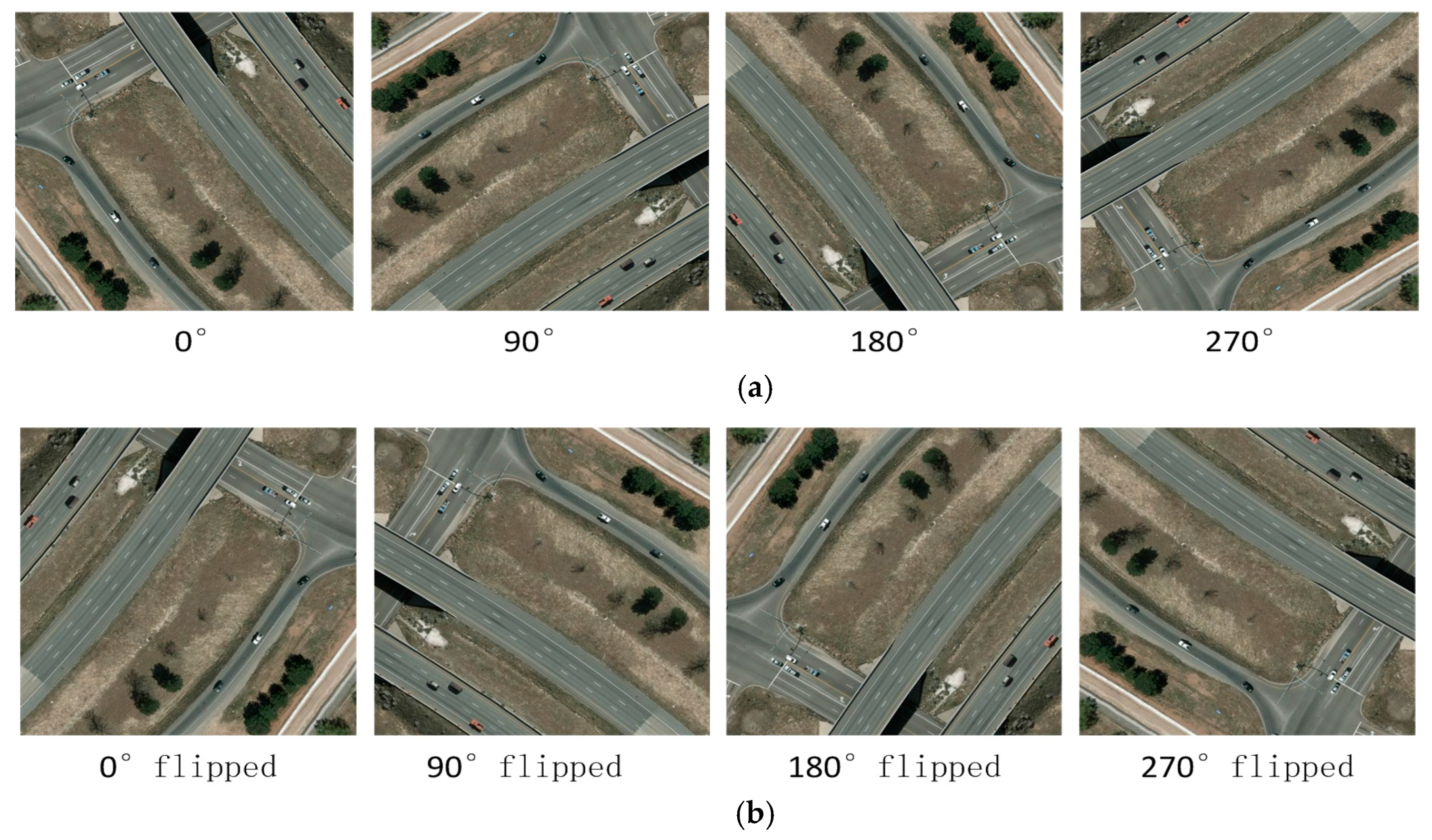
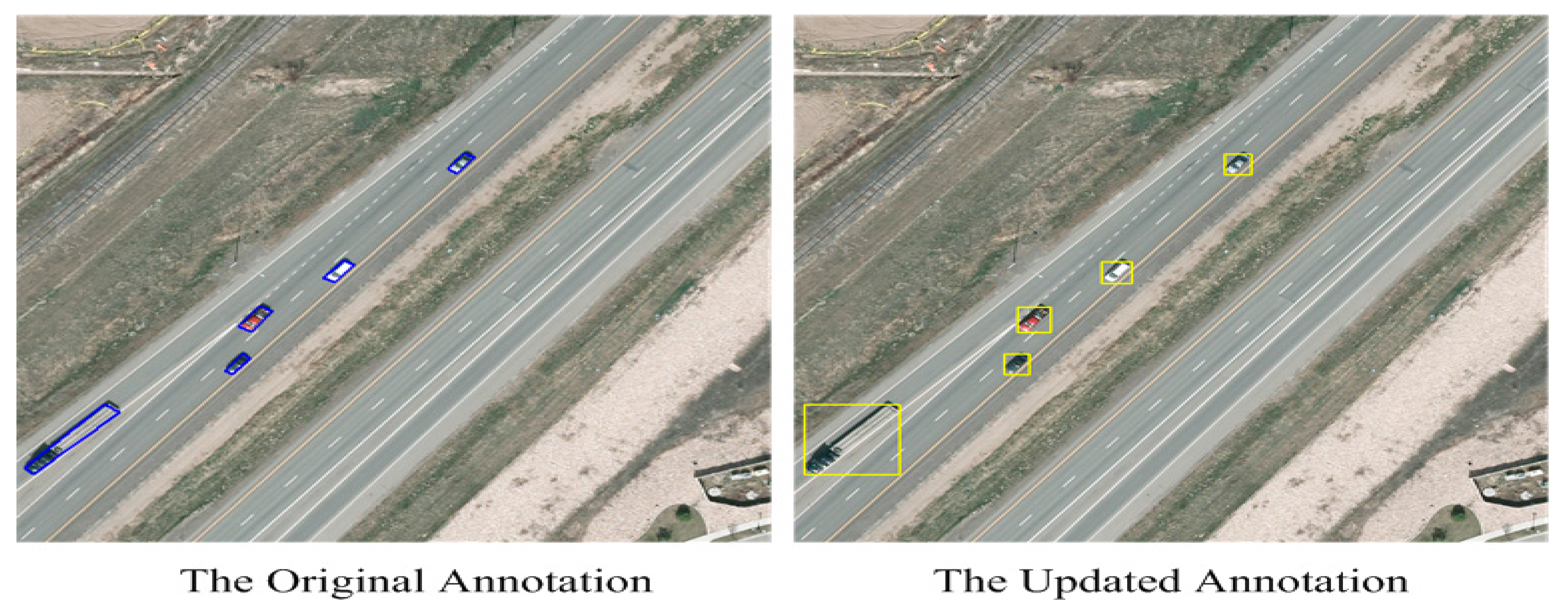
- An augmented dataset is built for vehicle detection in aerial images. To make the training data fit for our CNN-based model, we re-annotated the available public dataset. To avoid the overfitting, we performed data augmentation in two operations.
2. Related Work
2.1. Region Proposal Method
2.2. Target Detection with the CNN-Based Models
2.3. Vehicle Detection in Aerial Imagery
3. Overview of the Proposed Model
3.1. Training Data Augmentation
- (1)
- Obtaining the original four coordinates of bounding box: [xlt, ylt], [xrt, yrt], [xrb, yrb] and [xlb, ylb];
- (2)
- Calculating the height: h = max(ylt, yrt, yrb, ylb) − min(ylt, yrt, yrb, ylb);
- (3)
- Calculating the width: w = max(xlt, xrt, xrb, xlb) − min(xlt, xrt, xrb, xlb);
- (4)
- Updating the left-top coordinate as [min(xlt, xrt, xrb, xlb), min(ylt, yrt, yrb, ylb)];
- (5)
- Using the height, width and left-top coordinate to update other coordinates.
3.2. Vehicle-Regions Proposal Network
3.2.1. Overview of the Architecture
3.2.2. Loss Function
3.2.3. Training
3.3. Vehicle Detection Network
3.3.1. Overview of the Architecture
3.3.2. Loss Function and Training
4. Experiment and Results
4.1. Evaluation Metrics
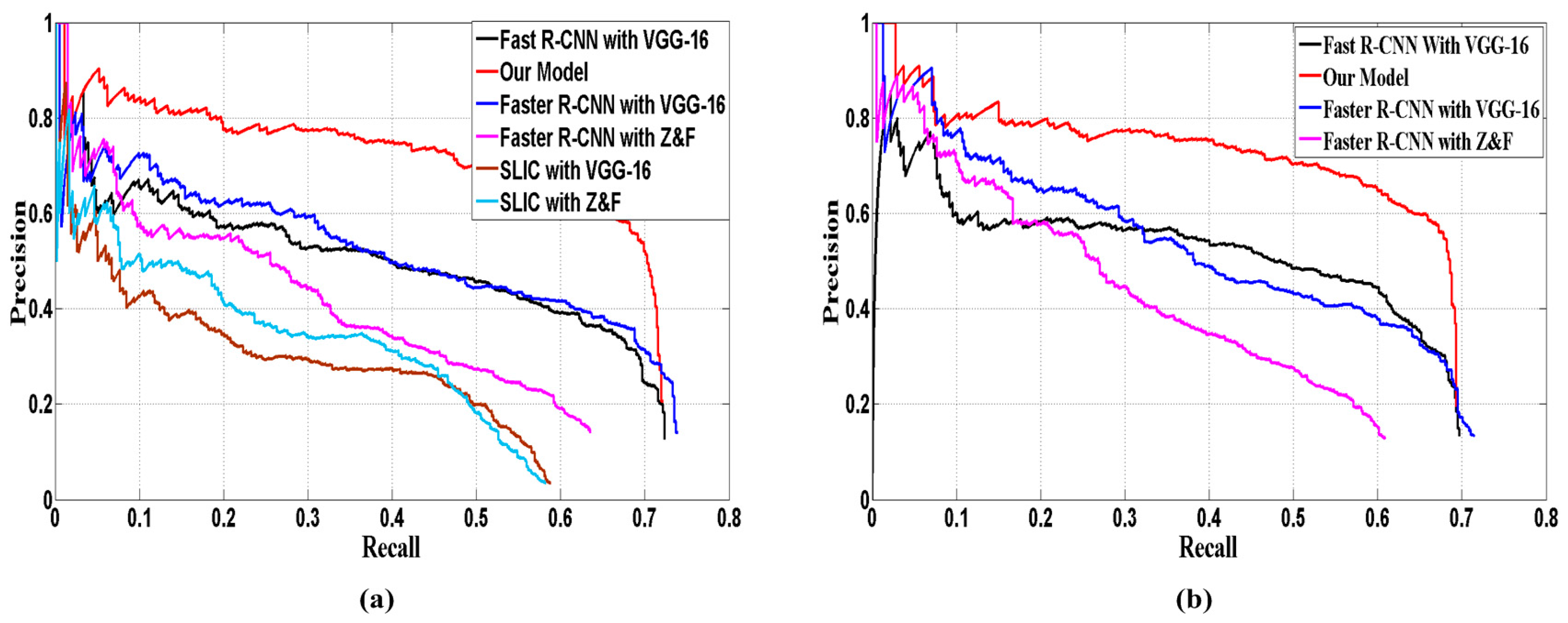
4.2. VEDAI Dataset
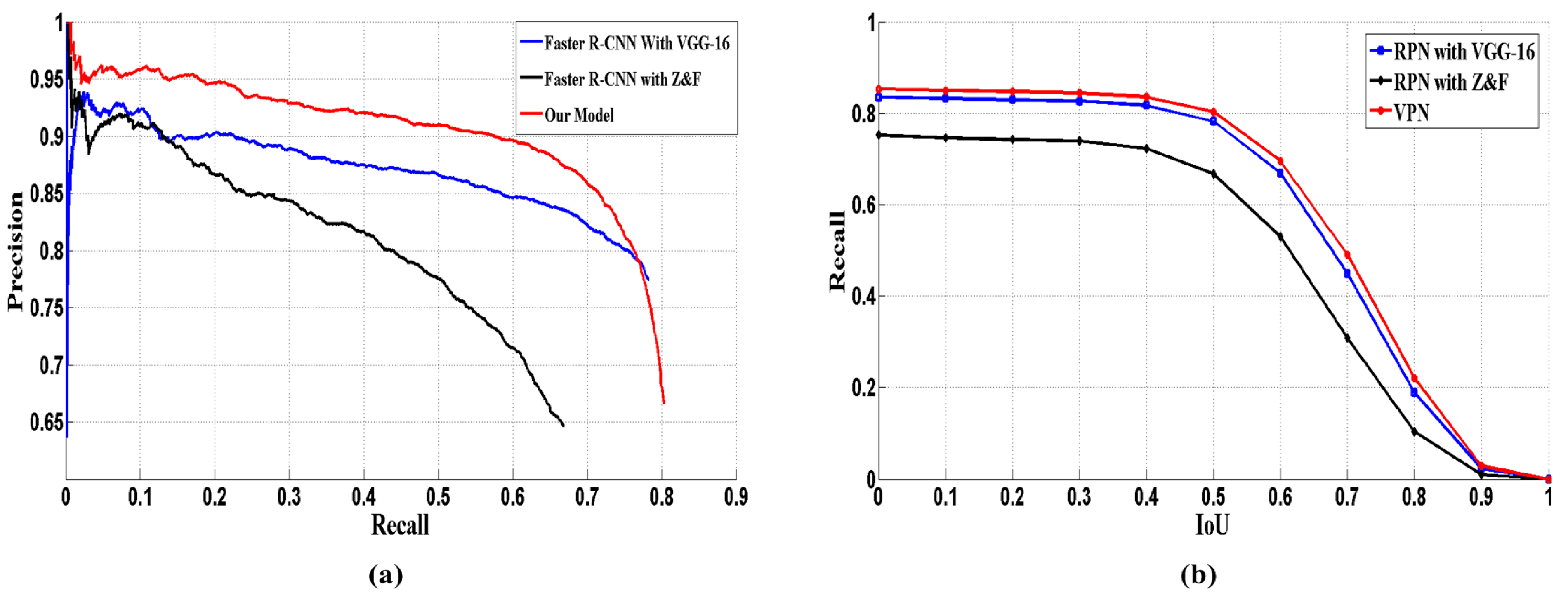
4.3. Munich Vehicle Dataset
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Tang, Y.; Zhang, C.; Gu, R.; Li, P.; Yang, B. Vehicle detection and recognition for intelligent traffic surveillance system. Multimedia Tools Appl. 2017, 76, 5817–5832. [Google Scholar] [CrossRef]
- Wen, X.; Shao, L.; Fang, W.; Xue, Y. Efficient Feature Selection and Classification for Vehicle Detection. IEEE Trans. Circuits Syst. Video Technol. 2015, 25, 508–517. [Google Scholar]
- Xu, H.; Zhou, Z.; Sheng, B.; Ma, L. Fast vehicle detection based on feature and real-time prediction. In Proceedings of the IEEE International Symposium on Circuits & Systems, Beijing, China, 19–23 May 2013; pp. 2860–2863. [Google Scholar]
- Gu, Q.; Yang, J.; Zhai, Y.; Kong, L. Vision-based multi-scaled vehicle detection and distance relevant mix tracking for driver assistance system. Opt. Rev. 2015, 22, 197–209. [Google Scholar] [CrossRef]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, San Diego, CA, USA, 20–25 June 2005; pp. 886–893. [Google Scholar]
- Lowe, D. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Chang, C.; Lin, C. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 389–396. [Google Scholar] [CrossRef]
- Viola, P.; Jones, M. Rapid object detection using a boosted cascade of simple features. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Kauai, HI, USA, 8–14 December 2001; pp. 511–518. [Google Scholar]
- Felzenszwalb, P.; Girshick, R.; McAllester, D.; Ramanan, D. Object detection with discriminatively trained part based models. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 1627–1645. [Google Scholar] [CrossRef] [PubMed]
- Uijlings, J.; Van de Sande, K.; Gevers, T.; Smeulders, A. Selective search for object recognition. Int. J. Comput. Vis. 2013, 104, 154–171. [Google Scholar] [CrossRef]
- Cheng, M.; Zhang, Z.; Lin, W.; Torr, P. BING: Binarized Normed Gradients for Objectness Estimation at 300 fps. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 3286–3293. [Google Scholar]
- Alexe, B.; Deselaers, T.; Ferrari, V. Measuring the objectness of image windows. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 54, 2189–2202. [Google Scholar] [CrossRef] [PubMed]
- Krizhevsky, A.; Sutskever, I.; Hinton, G. ImageNet classification with deep convolutional neural networks. In Proceedings of the 25th International Conference on Neural Information Processing System, Lake Tahoe, NV, USA, 3–6 December 2012; pp. 1097–1105. [Google Scholar]
- Deng, J.; Berg, A.; Satheesh, S.; Su, H.; Khosla, A.; Li, F. ImageNet Large Scale Visual Recognition Competition 2012 (ILSVRC2012). Available online: http://www.image-net.org/challenges/LSVRC/2012 (accessed on 10 July 2017).
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Sermanet, P.; Eigen, D.; Zhang, X.; Mathieu, M.; Fergus, R.; LeCun, Y. OverFeat: Integrated Recognition, Localization and Detection using Convolutional Networks. arXiv, 2013; arXiv:1312.6229. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef] [PubMed]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- Lin, T.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollar, P.; Zitnick, L. Microsoft COCO: Common Objects in Context. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 740–755. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. arXiv, 2014; arXiv:1409.1556. [Google Scholar]
- Ghodrati, A.; Pedersoli, M.; Tuytelaars, T.; Diba, A.; Gool, L. Deepproposal: Hunting objects by cascading deep convolutional layers. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 2578–2586. [Google Scholar]
- Carreira, J.; Sminchisescu, C. CPMC: Automatic object segmentation using constrained parametric min-cuts. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 1312–1328. [Google Scholar] [CrossRef] [PubMed]
- Zitnick, C.; Dollar, P. Edge boxes: Locating object proposals from edges. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 391–405. [Google Scholar]
- Hosang, J.; Benenson, R.; Dollar, P.; Schiele, B. What makes for effective detection proposals? IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 814–830. [Google Scholar] [CrossRef] [PubMed]
- Chavali, N.; Agrawal, H.; Mahendru, A.; Batra, D. Object-Proposal Evaluation Protocol is ‘Gameable’. In Proceedings of the IEEE International Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2578–2586. [Google Scholar]
- Arbeláez, P.; Pont-Tuset, J.; Barron, J.; Marques, F.; Malik, J. Multiscale combinatorial grouping. In Proceedings of the IEEE International Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 328–335. [Google Scholar]
- Kuo, W.; Hariharan, B.; Malik, J. Deepbox: Learning objectness with convolutional networks. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 2479–2487. [Google Scholar]
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P. SLIC superpixels compared to state-of-the-art superpixel methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2282. [Google Scholar] [CrossRef] [PubMed]
- Vedaldi, A.; Soatto, S. Quick shift and kernel methods for mode seeking. In Proceedings of the European Conference on Computer Vision, Marseille, France, 12–18 October 2008; pp. 705–718. [Google Scholar]
- Veksler, O.; Boykov, Y.; Mehrani, P. Superpixels and supervoxels in an energy optimization framework. In Proceedings of the European Conference on Computer Vision, Heraklion, Crete, Greece, 5–11 September 2010; pp. 211–224. [Google Scholar]
- Bergh, M.; Boix, X.; Roig, G.; Capitani, B.; Gool, L. SEEDS: Superpixels Extracted via Energy-Driven Sampling. Int. J. Comput. Vis. 2013, 7578, 1–17. [Google Scholar]
- Zhang, Y.; Sohn, K.; Villegas, R.; Pan, G.; Lee, H. Improving object detection with deep convolutional networks via bayesian optimization and structured prediction. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 249–258. [Google Scholar]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Erhan, D.; Szegedy, C.; Toshev, A.; Anguelov, D. Scalable object detection using deep neural networks. In Proceedings of the IEEE International Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 2155–2162. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE International Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Xu, Y.; Yu, G.; Wang, Y.; Wu, X.; Ma, Y. A Hybrid Vehicle Detection Method Based on Viola-Jones and HOG + SVM from UAV Images. Sensors 2016, 16, 1325. [Google Scholar] [CrossRef] [PubMed]
- Ammour, N.; Alhichri, H.; Bazi, Y.; Benjdira, B.; Alajlan, N. Deep Learning Approach for Car Detection in UAV Imagery. Remote Sens. 2017, 9, 312. [Google Scholar] [CrossRef]
- Qu, T.; Zhang, Q.; Sun, S. Vehicle detection from high-resolution aerial images using spatial pyramid pooling-based deep convolutional neural networks. Multimedia Tools Appl. 2016, 76, 21651–21663. [Google Scholar] [CrossRef]
- Tang, T.; Zhou, S.; Deng, Z.; Zou, H.; Lei, L. Vehicle Detection in Aerial Images Based on Region Convolutional Neural Networks and Hard Negative Example Mining. Sensors 2017, 17, 336. [Google Scholar] [CrossRef] [PubMed]
- Deng, Z.; Sun, H.; Zhou, S.; Zhao, J.; Zou, H. Toward Fast and Accurate Vehicle Detection in Aerial Images Using Coupled Region-Based Convolutional Neural Networks. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3652–3664. [Google Scholar] [CrossRef]
- Razakarivony, S.; Jurie, F. Vehicle detection in aerial imagery: A small target detection benchmark. J. Vis. Commun. Image Represent. 2016, 34, 187–203. [Google Scholar] [CrossRef]
- Liu, K.; Mattyus, G. Fast Multiclass Vehicle Detection on Aerial Images. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1938–1942. [Google Scholar]
- Kong, T.; Yao, A.; Chen, Y.; Sun, F. Hypernet: Towards accurate region proposal generation and joint object detection. In Proceedings of the IEEE International Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 845–853. [Google Scholar]
- LeCun, Y.; Boser, B.; Denker, J.; Henderson, D.; Howard, R.; Hubbard, W.; Jackel, L. Backpropagation applied to handwritten zip code recognition. Neural Comput. 1989, 4, 541–551. [Google Scholar] [CrossRef]
- Jia, Y.; Shelhamer, E.; Donahue, J.; Karayev, S.; Long, J. Caffe: Convolutional Architecture for Fast Feature Embedding. In Proceedings of the 22nd ACM International Conference on Multimedia, Orlando, FL, USA, 3–7 November 2014; pp. 675–678. [Google Scholar]
- Everingham, M.; Gool, L.; Williams, C.; Winn, J.; Zisserman, A. The Pascal Visual Object Classes (VOC) Challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef]
- Lipton, Z.; Elkan, C.; Naryanaswamy, B. Optimal Thresholding of Classifiers to Maximize F1 Measure. In Proceedings of the European Conference on Machine Learning and Knowledge Discovery in Databases, Nancy, France, 15–19 September 2014; pp. 225–239. [Google Scholar]
- Zeiler, M.; Fergus, R. Visualizing and Understanding Convolutional Networks. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 818–833. [Google Scholar]
- Leitloff, J.; Rosenbaum, D.; Kurz, F.; Meynberg, O.; Reinartz, P. An operational system for estimating road traffic information from aerial images. Remote Sens. 2014, 6, 11315–11341. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classes | Tag | Number |
|---|---|---|
| Car | car | 1340 |
| Pick-up | pic | 950 |
| Truck | tru | 300 |
| Plane | pla | 47 |
| Boat | boa | 170 |
| Camping car | cam | 390 |
| Tractor | tra | 190 |
| Vans | van | 100 |
| Other | oth | 200 |
| Detection Model | Image Size | Recall Rate | AP | F1-Score |
|---|---|---|---|---|
| Faster R-CNN (Z&F) | 1024 × 1024 | 63.5% | 30.8% | 0.229 |
| Faster R-CNN (VGG-16) | 1024 × 1024 | 73.9% | 42.1% | 0.232 |
| Fast R-CNN (VGG-16) | 1024 × 1024 | 72.2% | 39.8% | 0.216 |
| SLIC with Z&F | 1024 × 1024 | 58.3% | 25.4% | 0.066 |
| SLIC with VGG-16 | 1024 × 1024 | 58.8% | 23.2% | 0.064 |
| Our Model | 1024 × 1024 | 72.3% | 54.6% | 0.320 |
| Faster R-CNN (Z&F) | 512 × 512 | 60.9% | 32.0% | 0.212 |
| Faster R-CNN (VGG-16) | 512 × 512 | 71.4% | 40.9% | 0.225 |
| Fast R-CNN (VGG-16) | 512 × 512 | 69.4% | 37.3% | 0.224 |
| Our Model | 512 × 512 | 69.7% | 50.2% | 0.305 |
| Detection Model | Image Size | Detection Time | Training Time |
|---|---|---|---|
| Faster R-CNN (Z&F) | 1024 × 1024 | 5.8 fps | 28.4 h |
| Faster R-CNN (VGG-16) | 1024 × 1024 | 5.4 fps | 28.5 h |
| Fast R-CNN (VGG-16) | 1024 × 1024 | 0.4 fps | 8.2 h |
| SLIC with Z&F | 1024 × 1024 | 5.6 fps | 7.9 h |
| SLIC with VGG-16 | 1024 × 1024 | 4.9 fps | 8.2 h |
| Our Model | 1024 × 1024 | 4.5 fps | 10.7 h |
| Faster R-CNN (Z&F) | 512 × 512 | 6.3 fps | 28.3 h |
| Faster R-CNN (VGG-16) | 512 × 512 | 5.6 fps | 28.6 h |
| Fast R-CNN (VGG-16) | 512 × 512 | 0.4 fps | 8.1 h |
| Our Model | 512 × 512 | 4.6 fps | 10.6 h |
| Detection Model | Recall Rate | AP | F1-Score | Detection Time (fps) |
|---|---|---|---|---|
| Faster R-CNN (Z&F) | 66.8% | 53.9% | 0.657 | 5.2 |
| Faster R-CNN (VGG-16) | 78.3% | 64.8% | 0.779 | 4.9 |
| Our Model | 80.3% | 73.7% | 0.782 | 3.2 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhong, J.; Lei, T.; Yao, G. Robust Vehicle Detection in Aerial Images Based on Cascaded Convolutional Neural Networks. Sensors 2017, 17, 2720. https://doi.org/10.3390/s17122720
Zhong J, Lei T, Yao G. Robust Vehicle Detection in Aerial Images Based on Cascaded Convolutional Neural Networks. Sensors. 2017; 17(12):2720. https://doi.org/10.3390/s17122720
Chicago/Turabian StyleZhong, Jiandan, Tao Lei, and Guangle Yao. 2017. "Robust Vehicle Detection in Aerial Images Based on Cascaded Convolutional Neural Networks" Sensors 17, no. 12: 2720. https://doi.org/10.3390/s17122720
APA StyleZhong, J., Lei, T., & Yao, G. (2017). Robust Vehicle Detection in Aerial Images Based on Cascaded Convolutional Neural Networks. Sensors, 17(12), 2720. https://doi.org/10.3390/s17122720