An Enhanced Non-Coherent Pre-Filter Design for Tracking Error Estimation in GNSS Receivers


Abstract
:1. Introduction
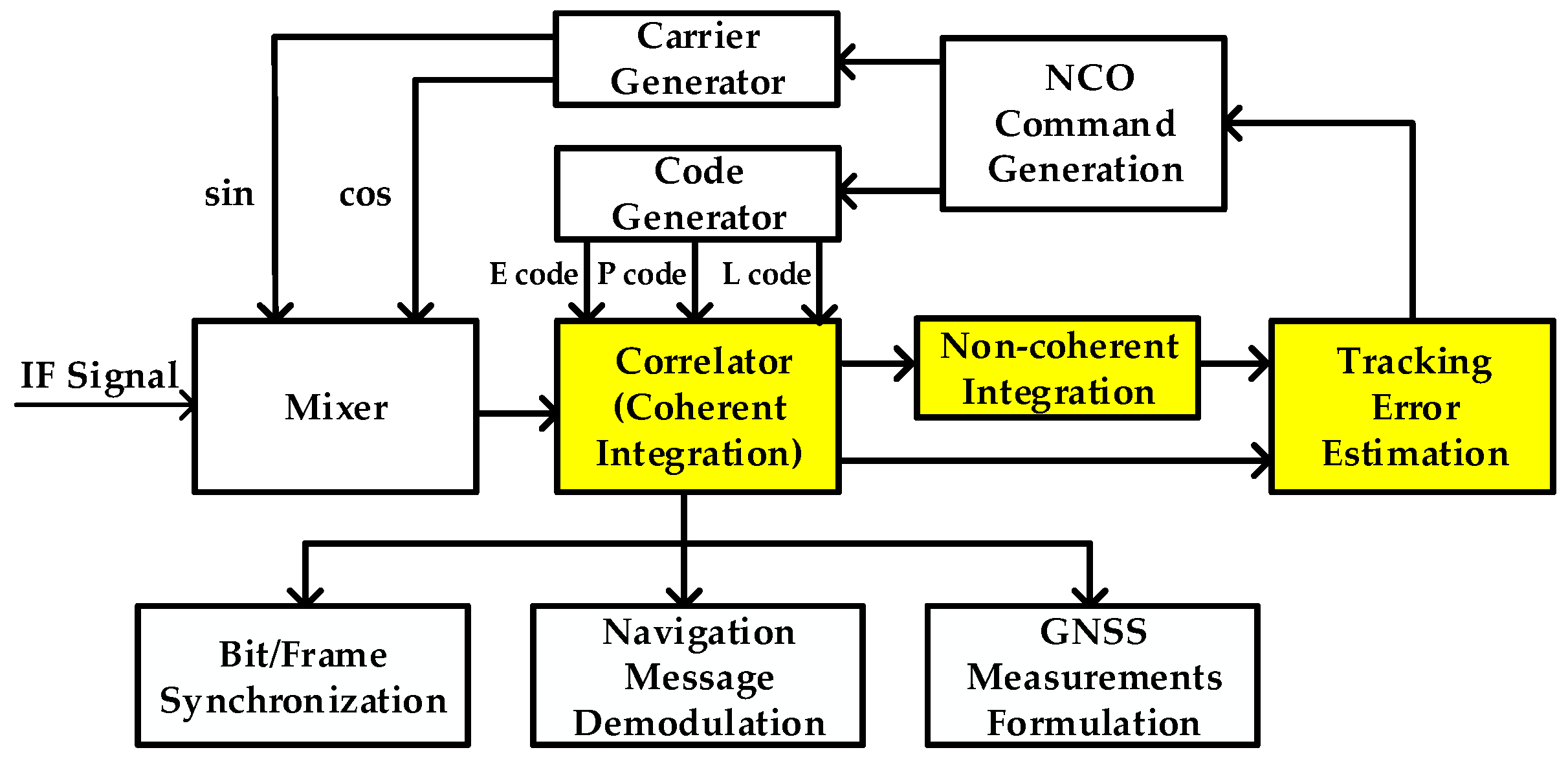
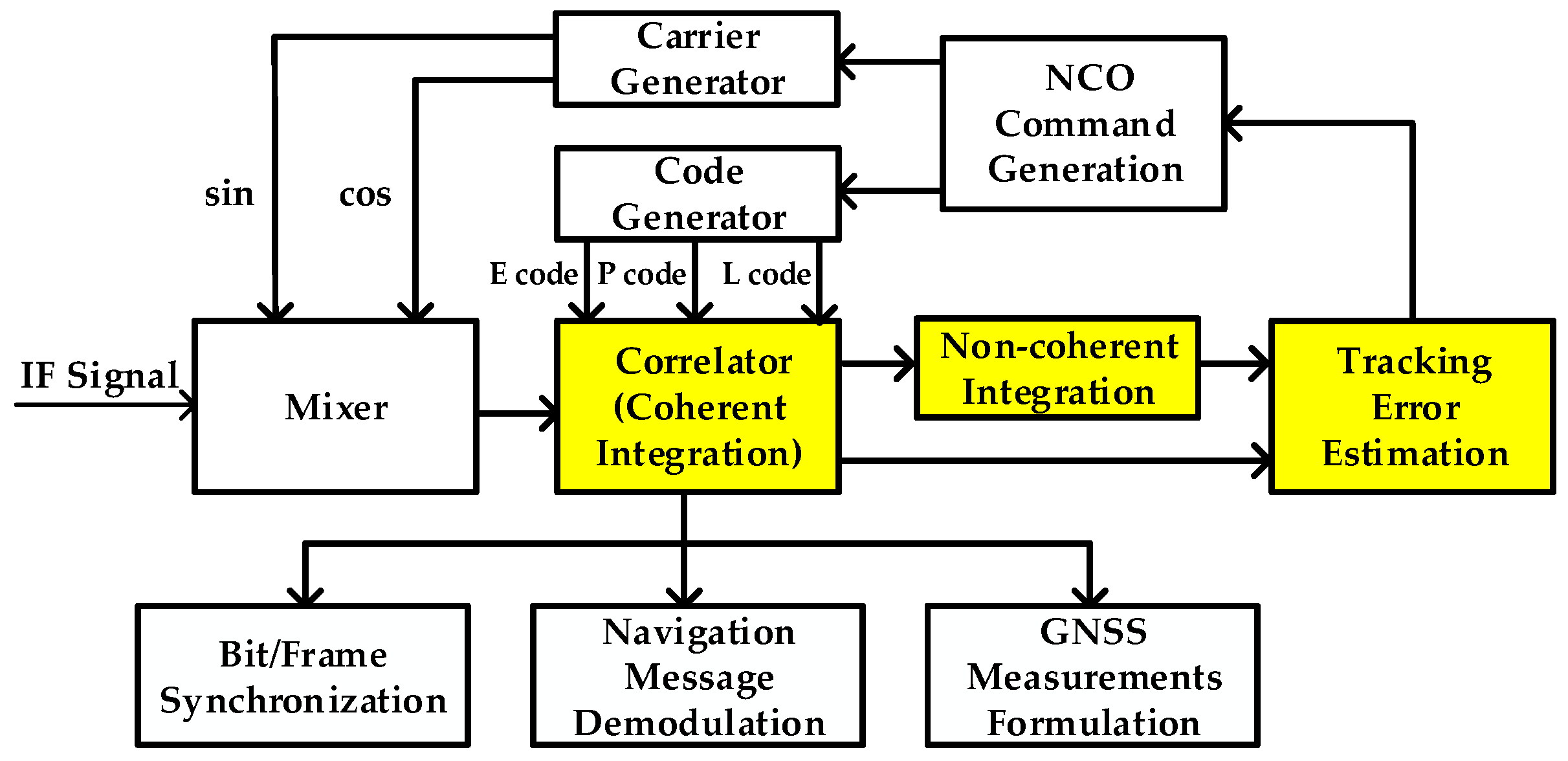
2. Tracking Error Estimation
2.1. Relevant Baseband Signal Model
2.2. Traditional Discriminator
2.3. Non-Coherent Pre-Filter Design
2.4. Coherent Prefilter Design
3. Enhanced Non-Coherent Pre-Filter Design
3.1. Observation Noise Characteristics Analysis of Non-Coherent Pre-Filter
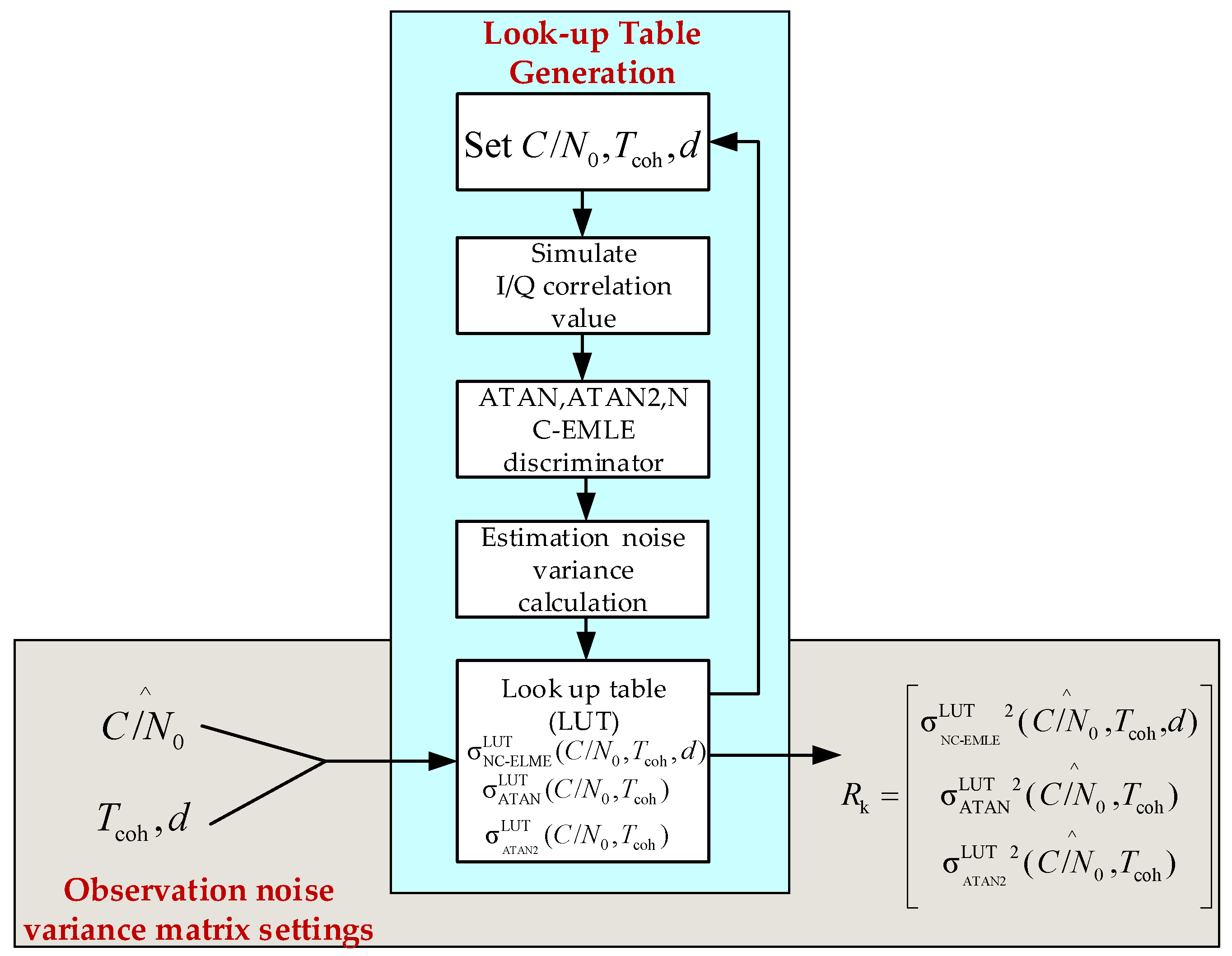
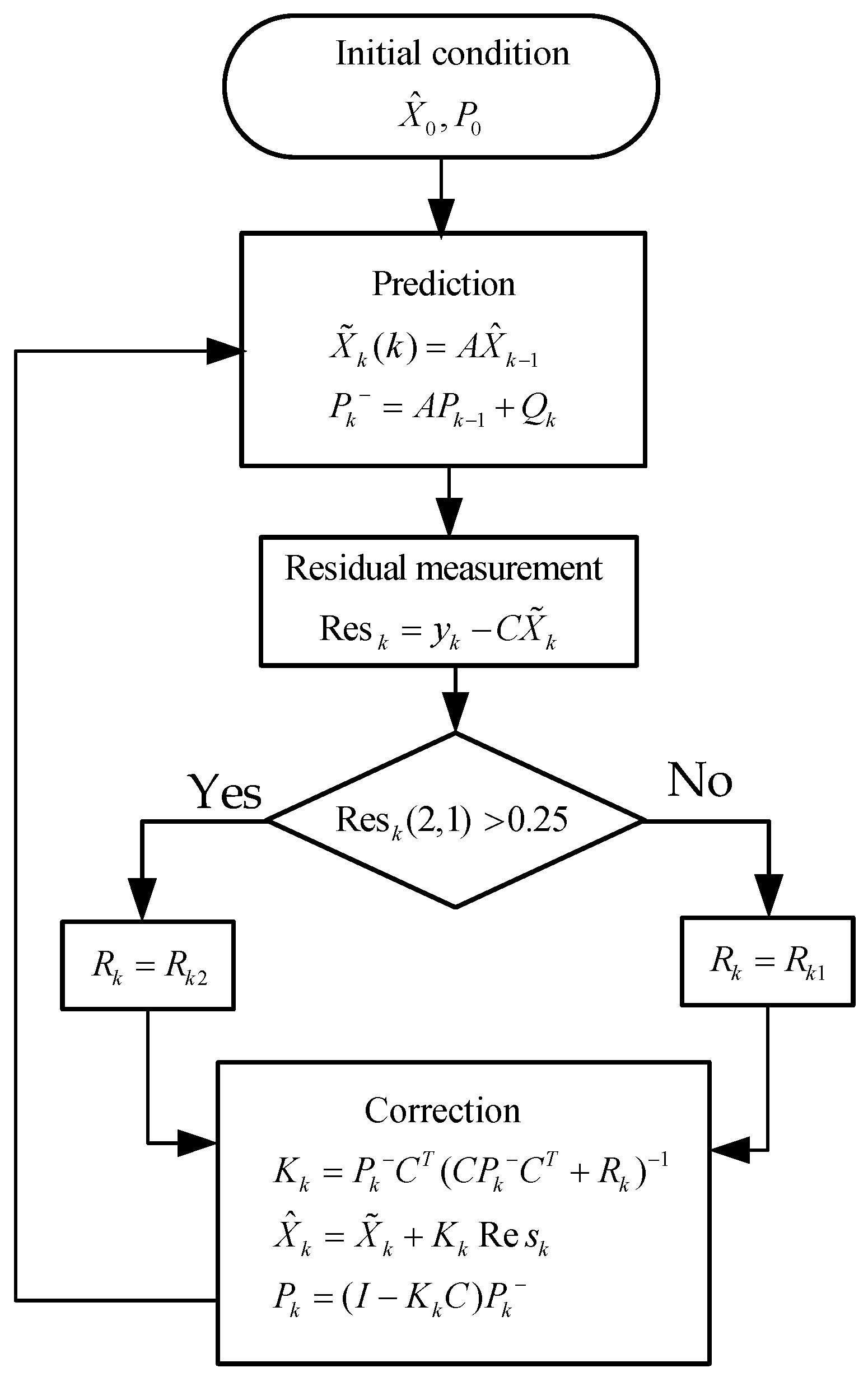
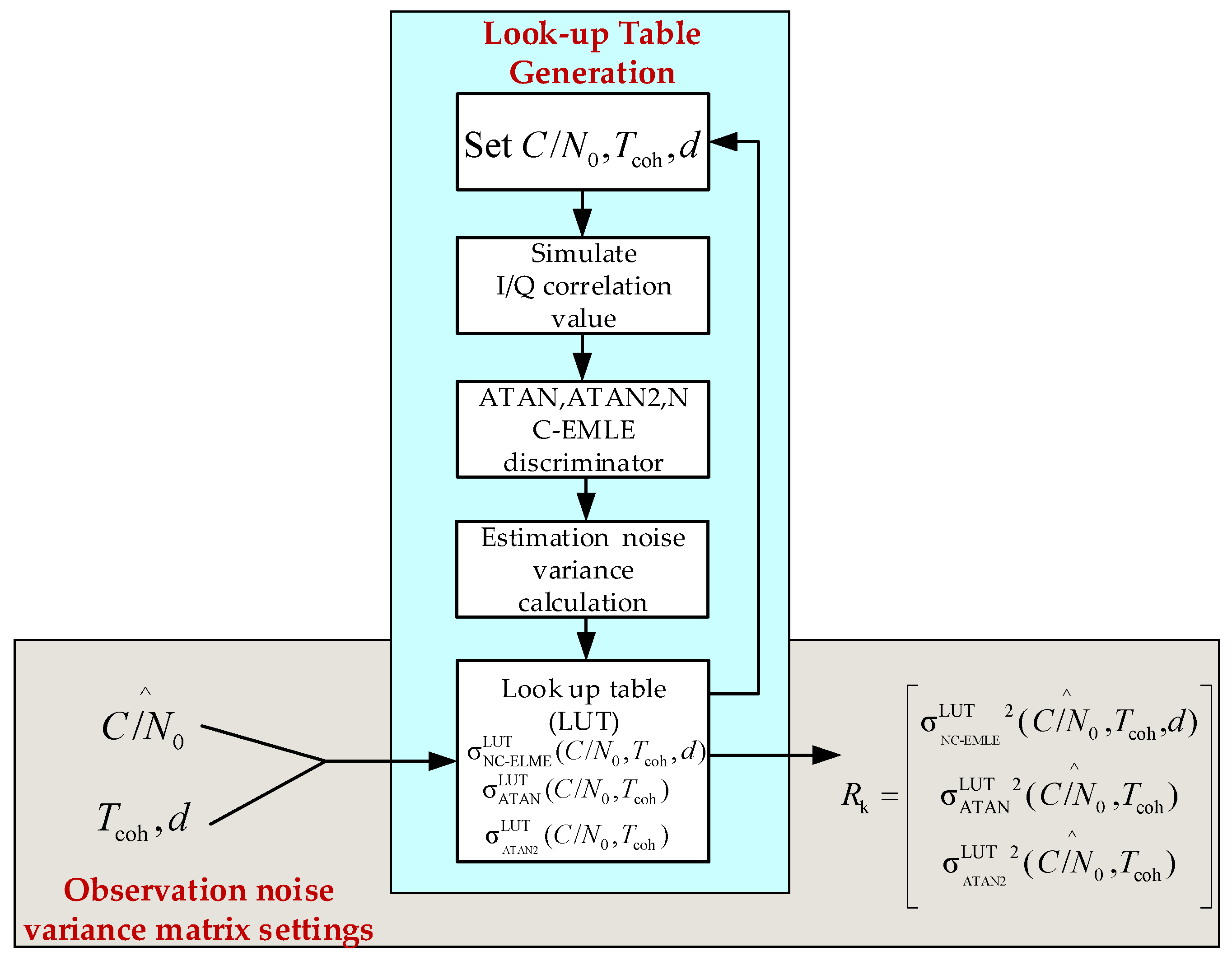
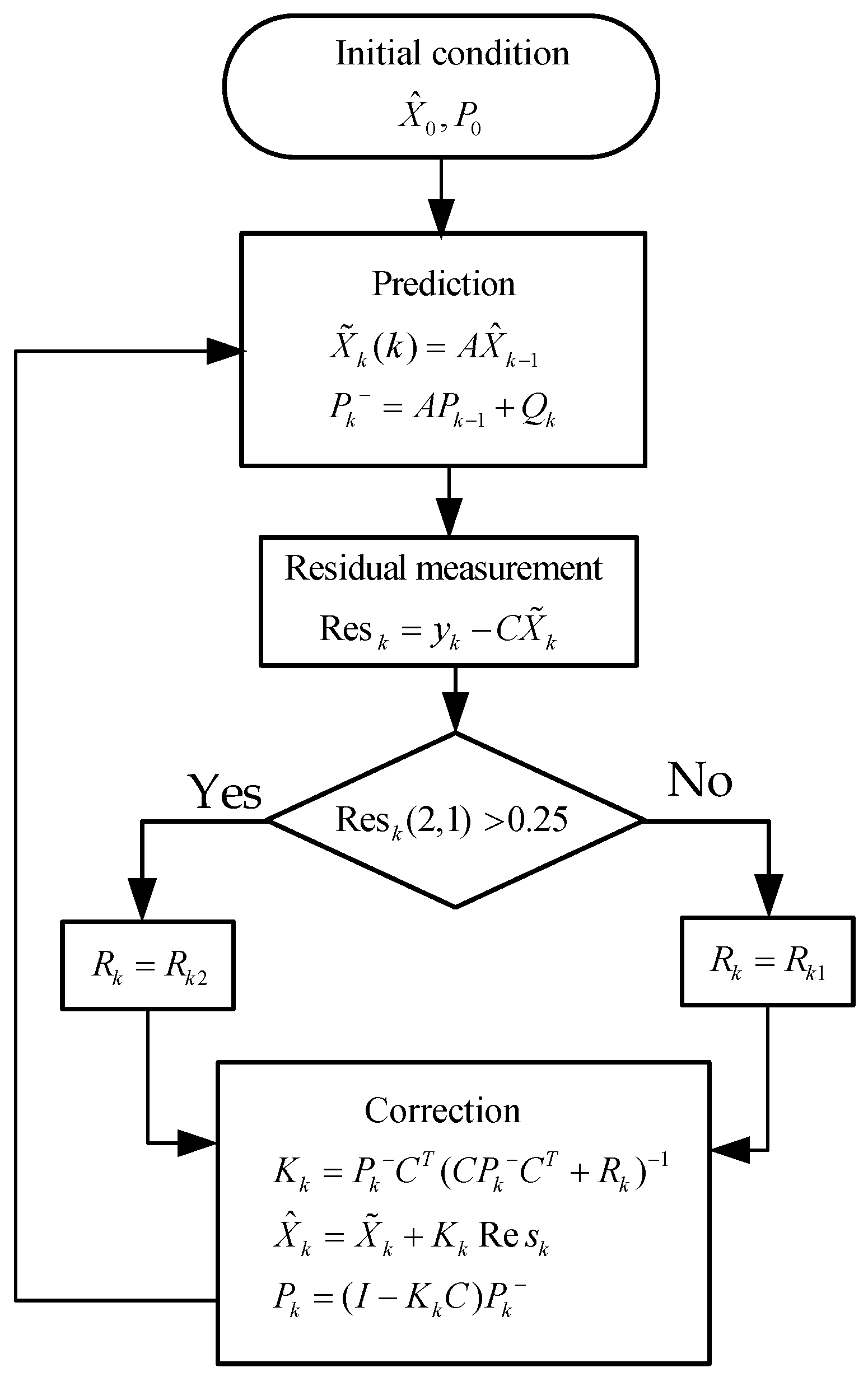
3.2. Implementing FDE Structure in the Non-Coherent Prefilter Design
4. Performance Evaluation
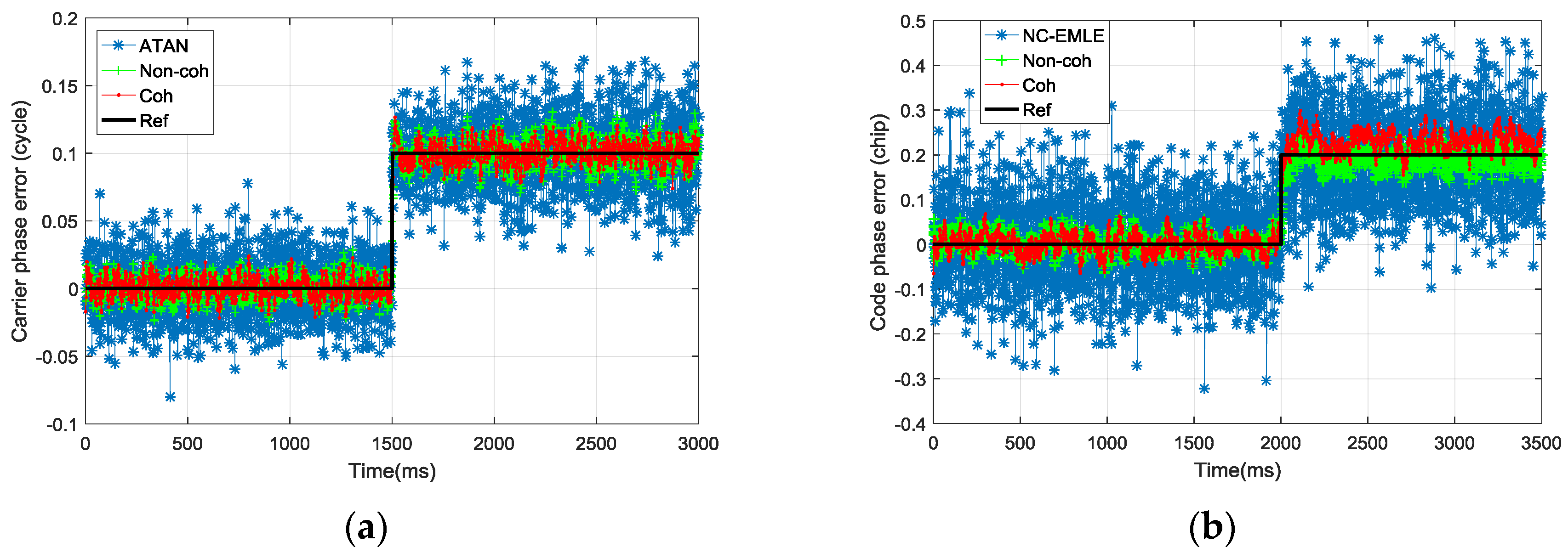
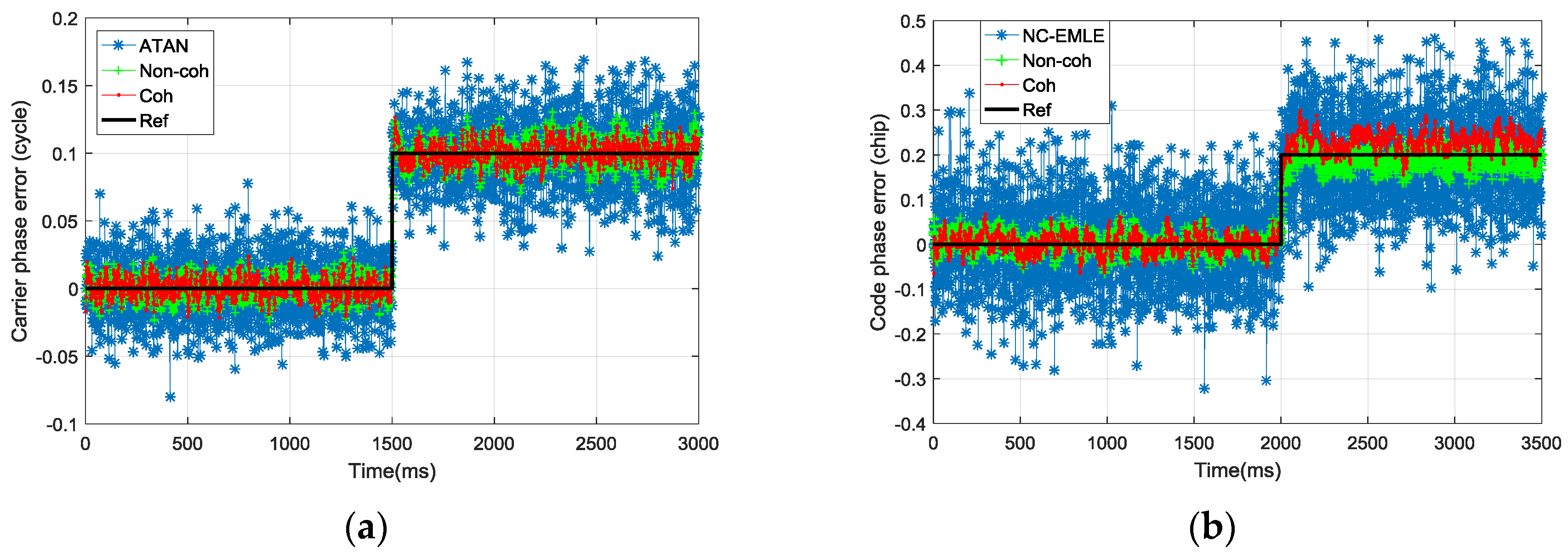
4.1. Carrier Phase Error/Code Phase Error Step Scene
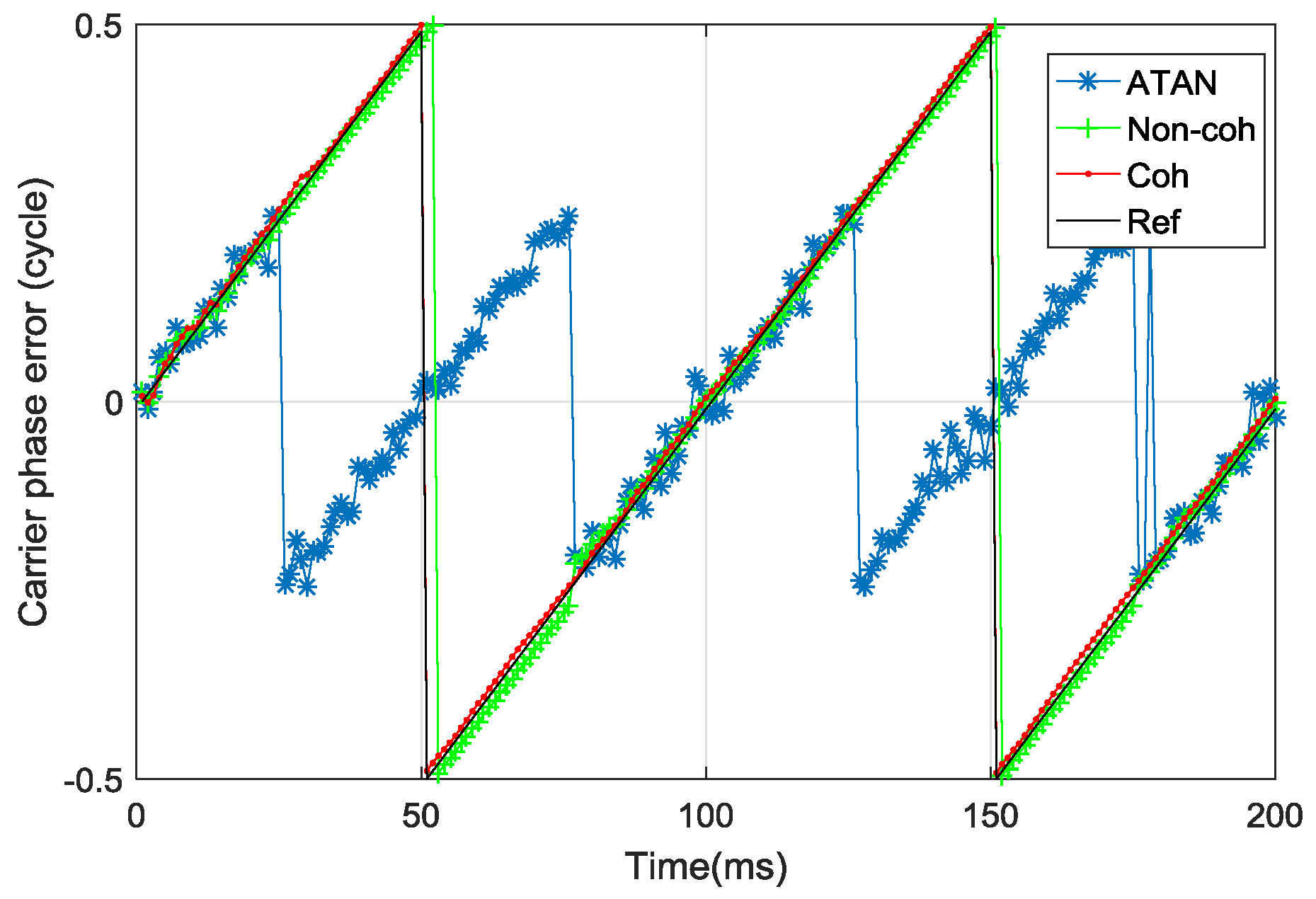
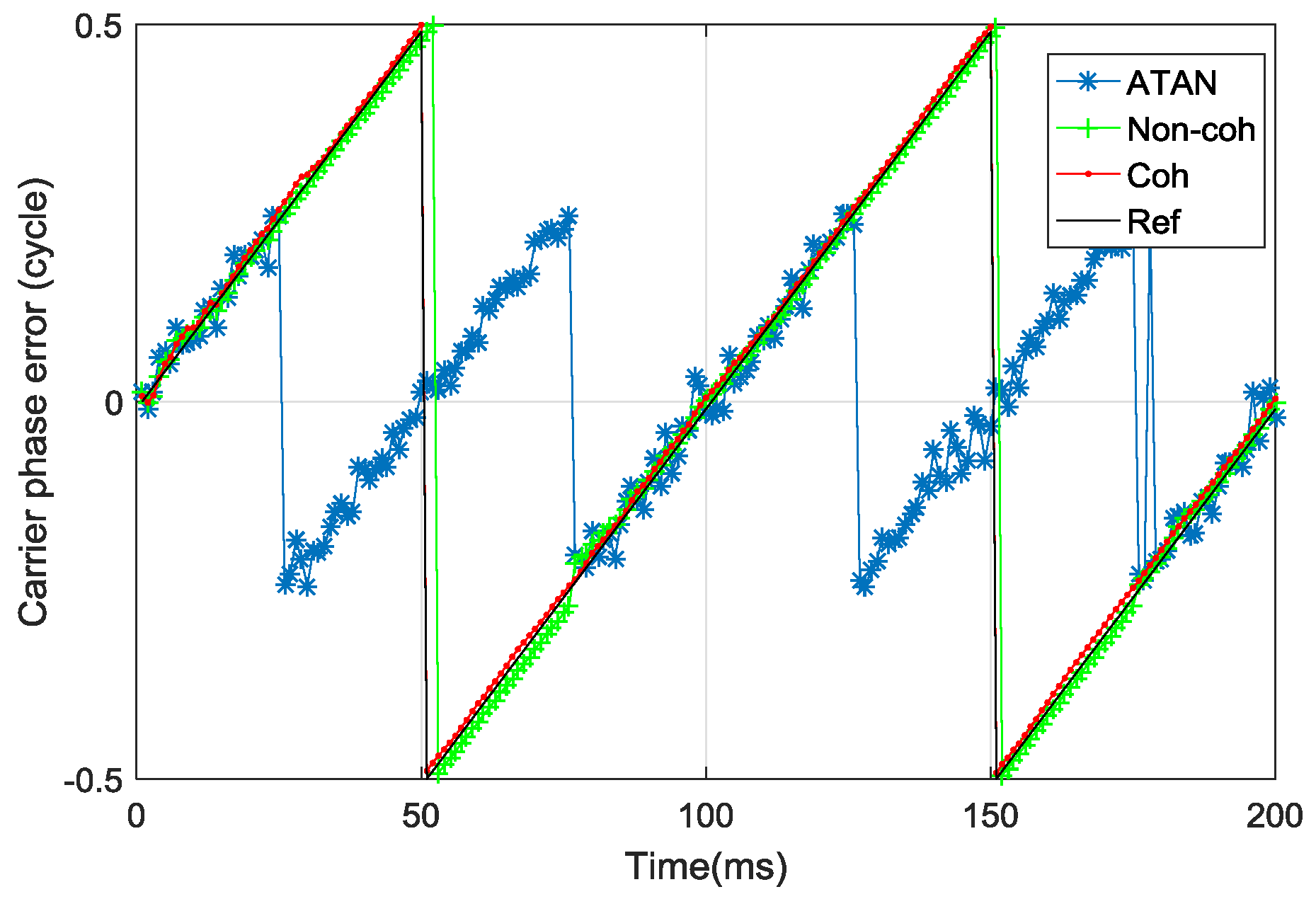
4.2. Constant Carrier Frequency Error Scene
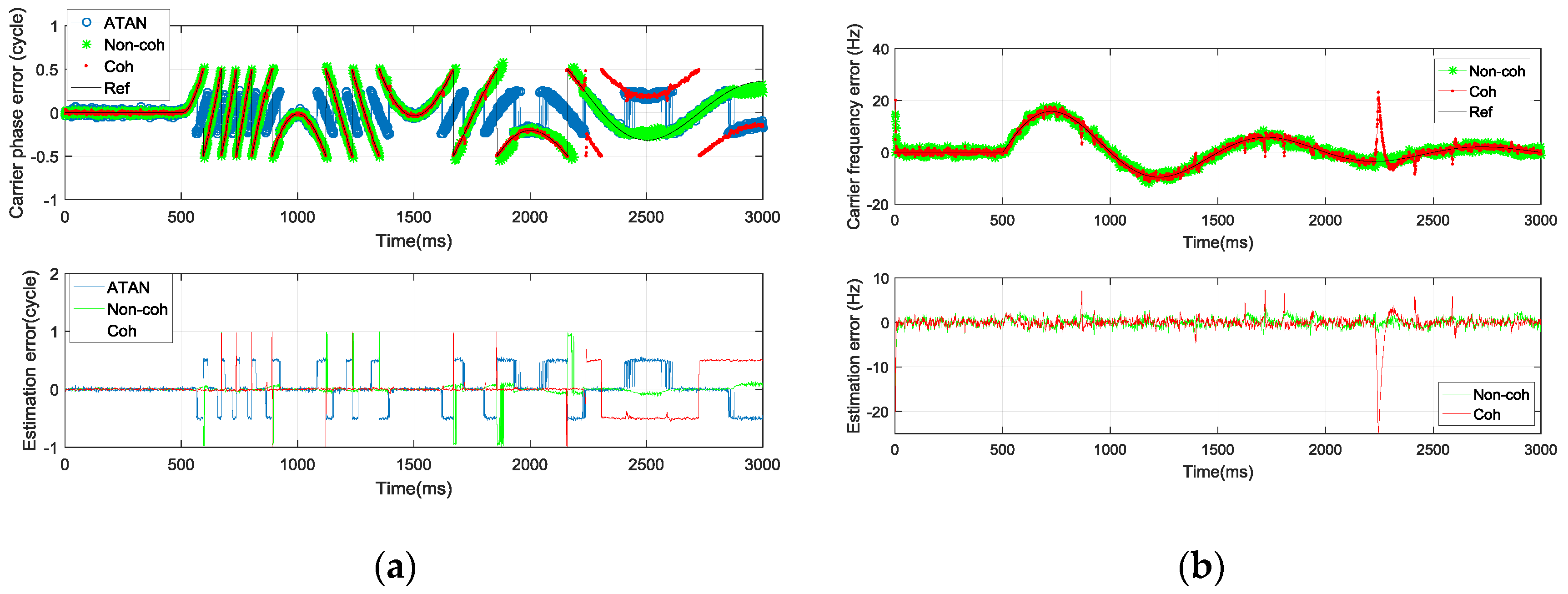
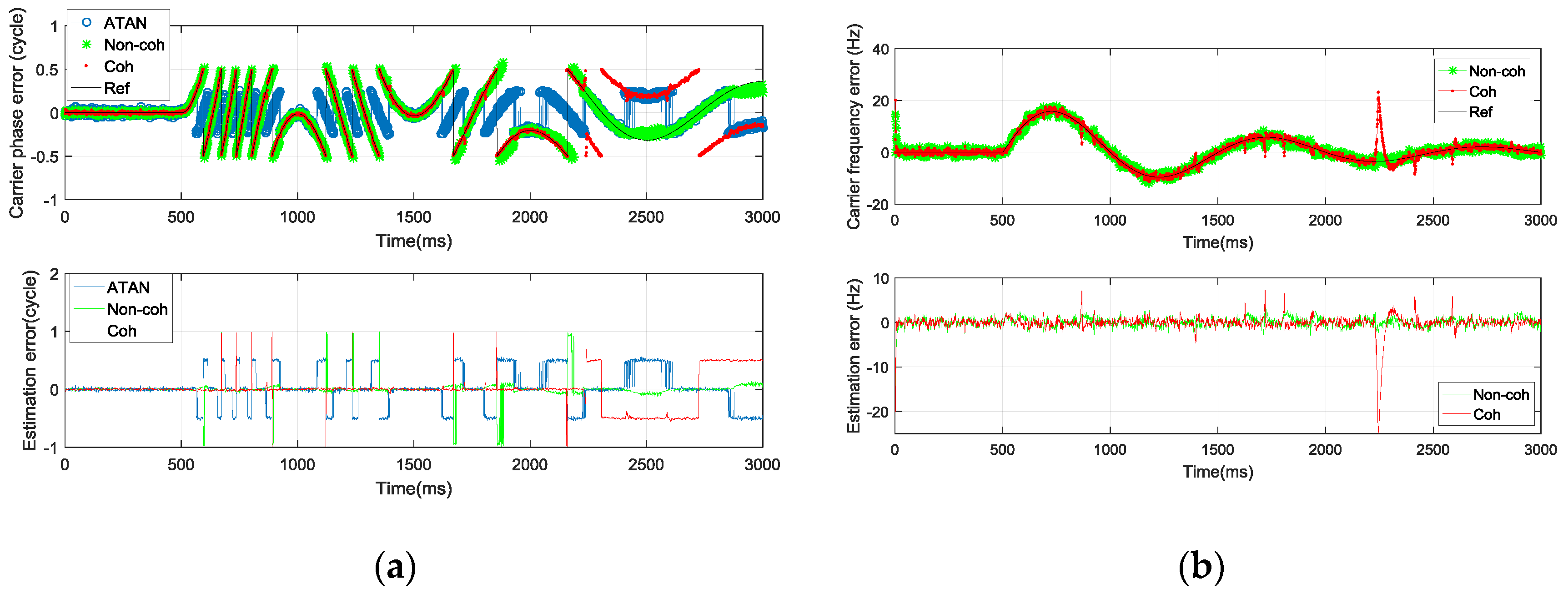
4.3. Varying Carrier Frequency Error Scene
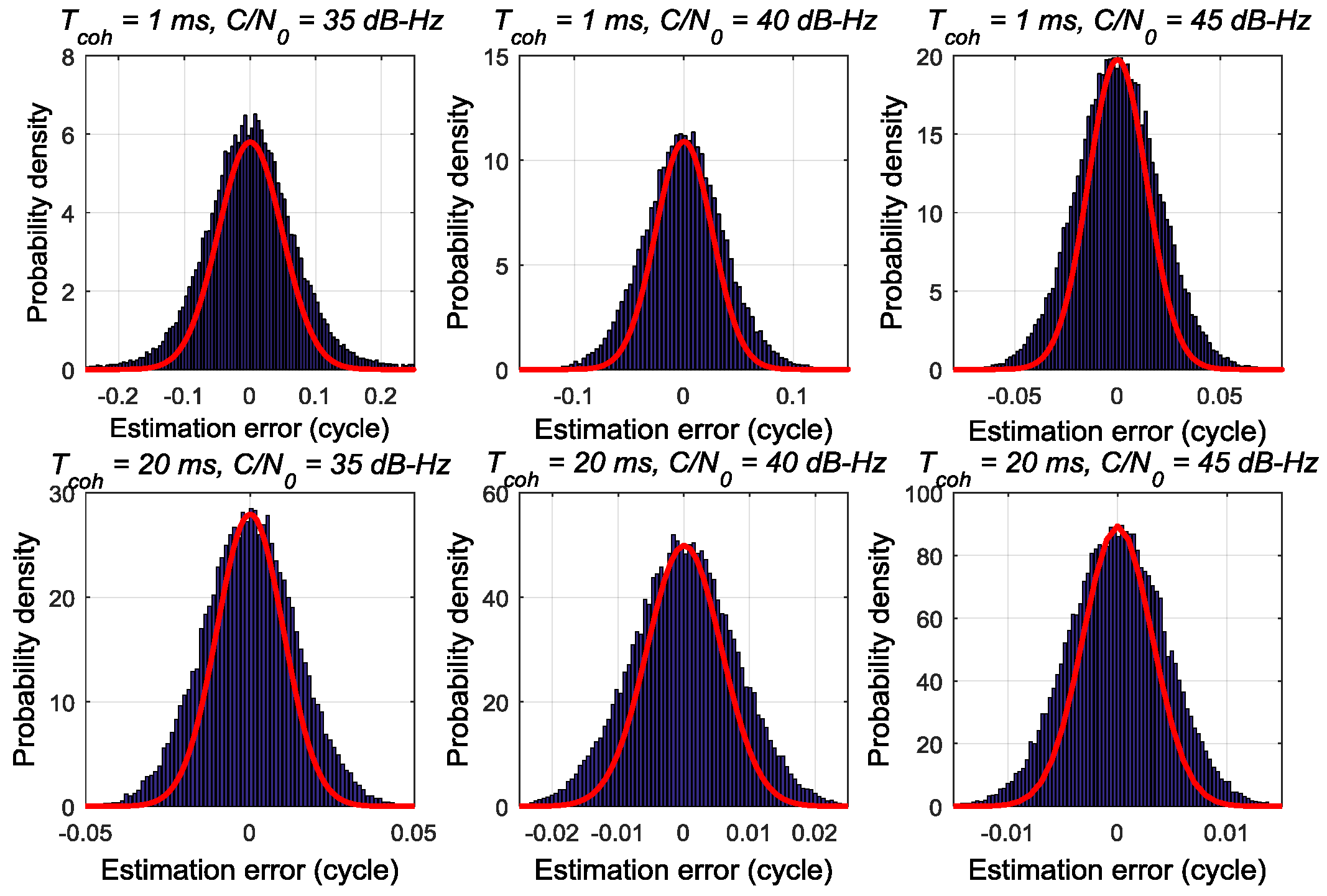
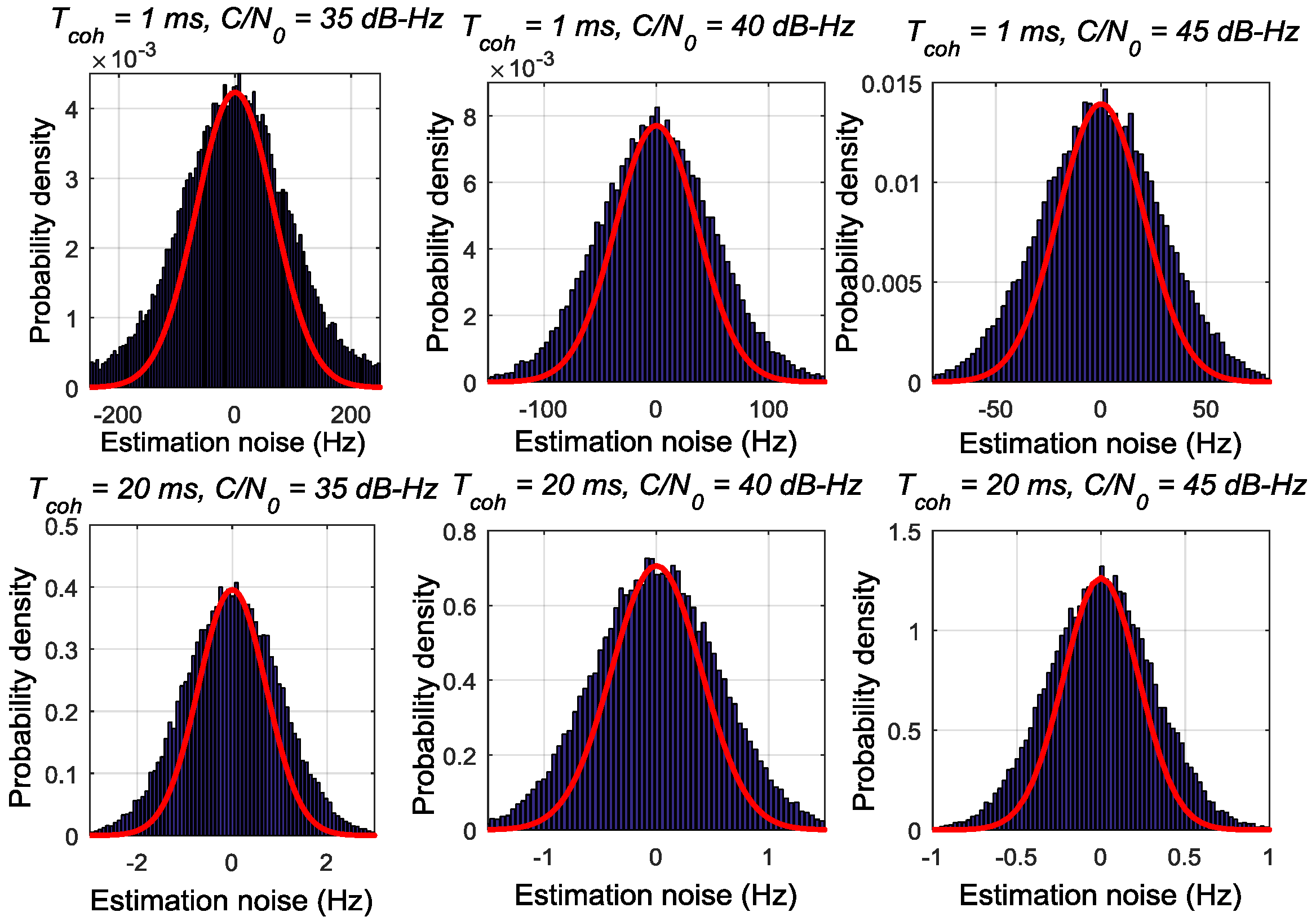
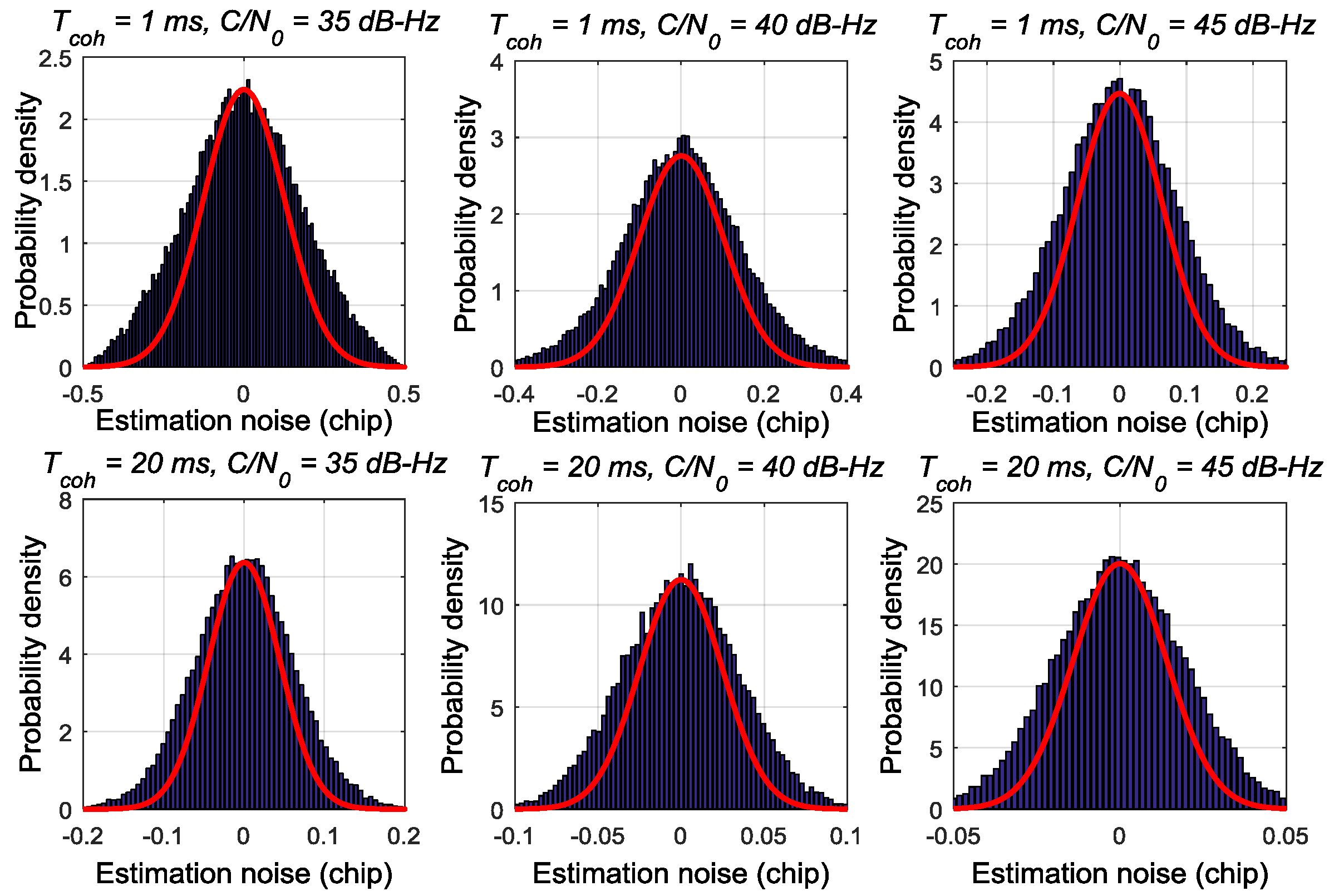
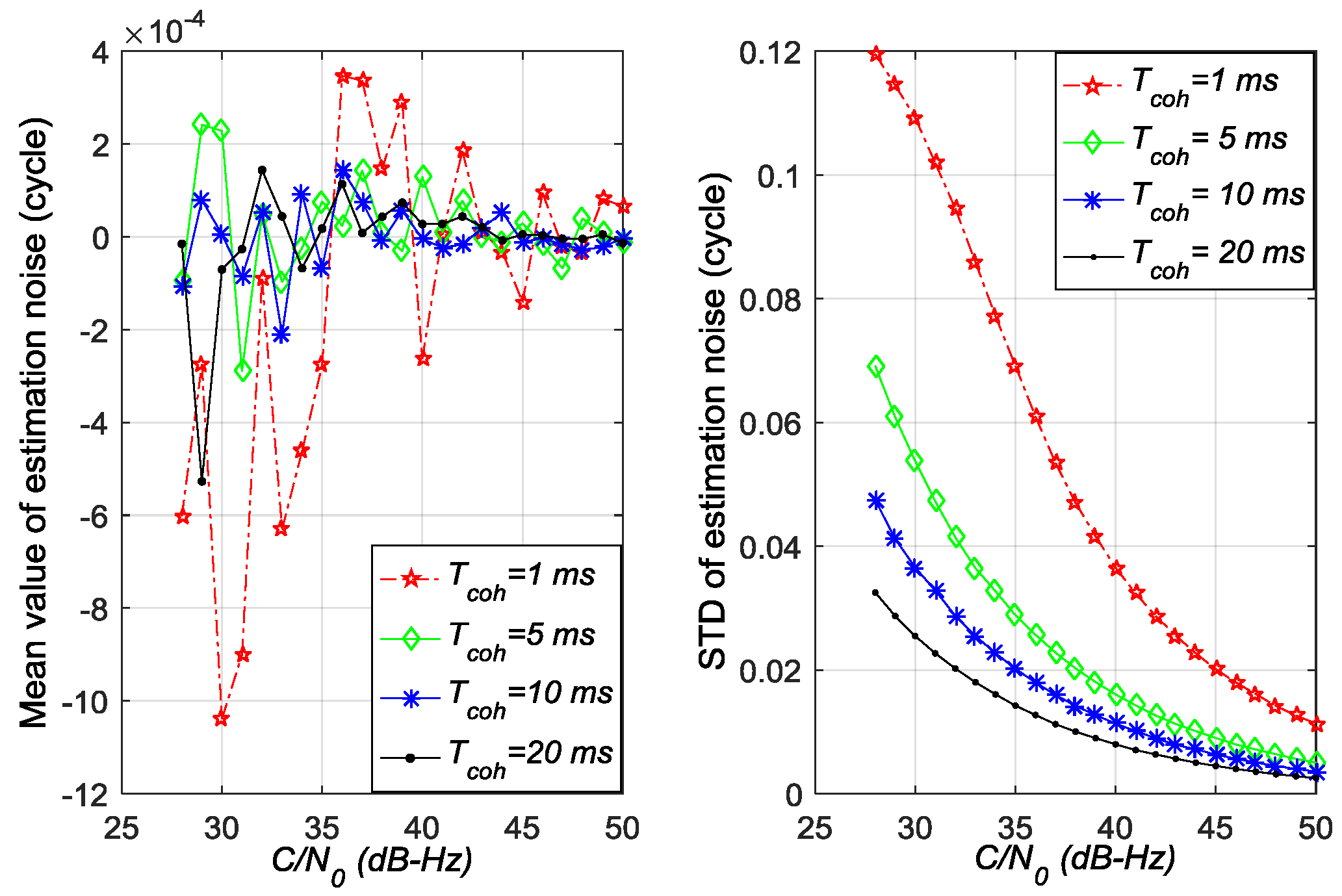
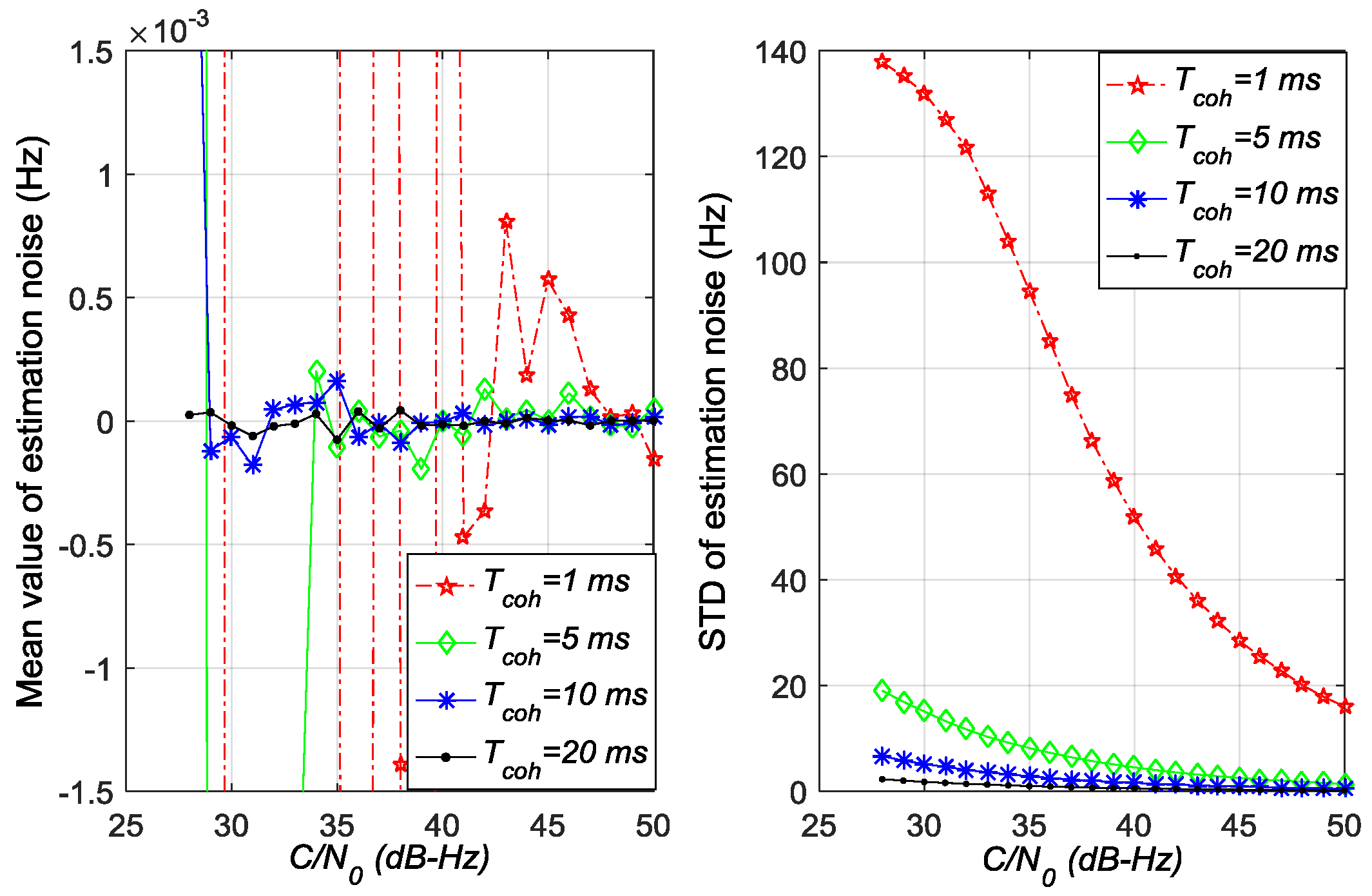
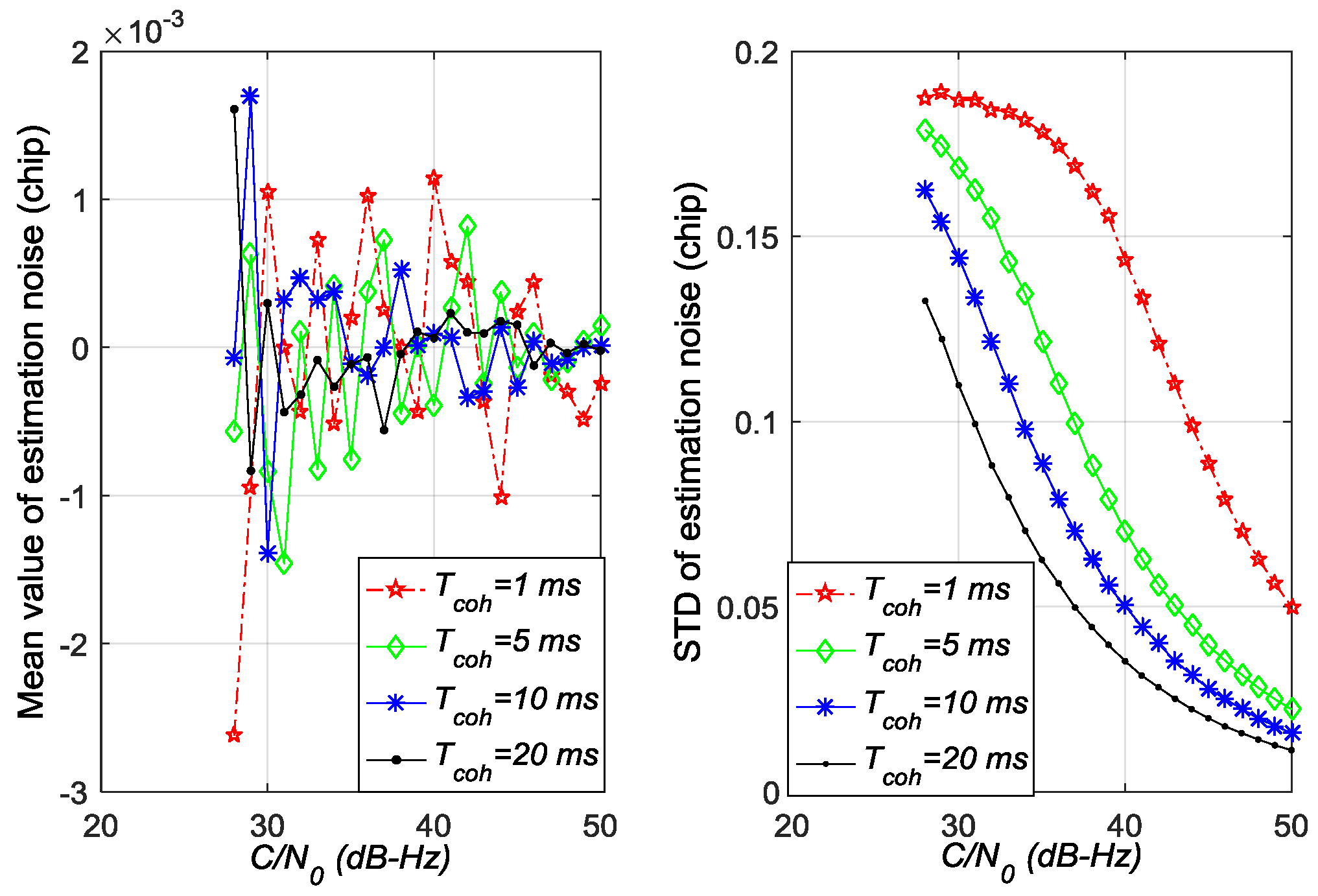
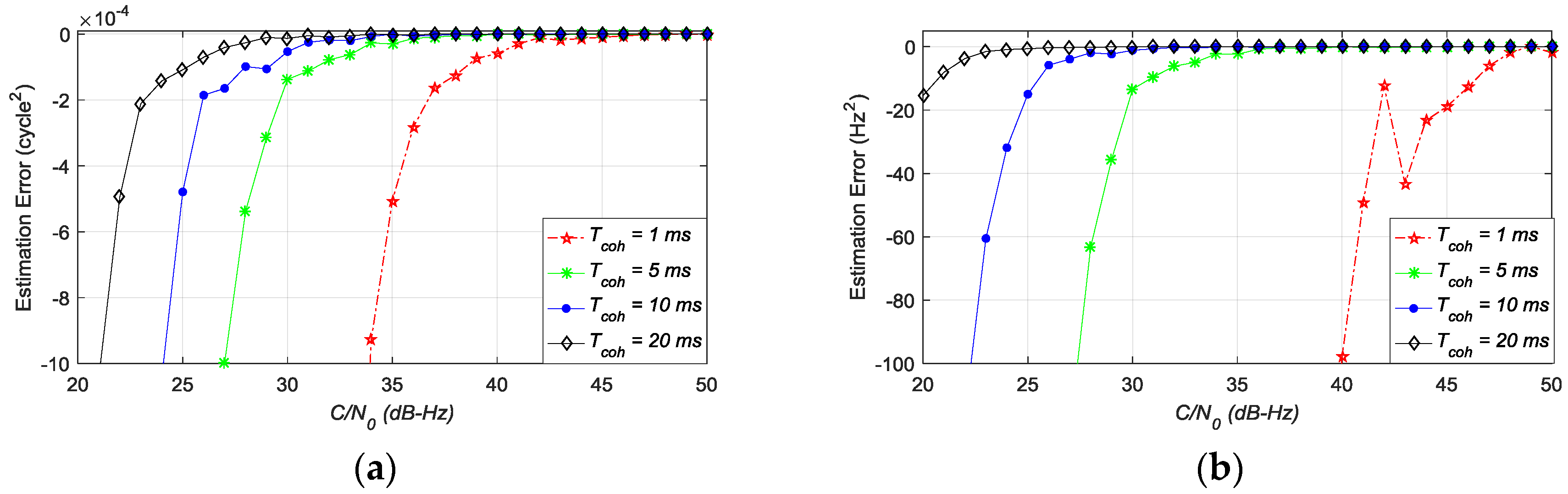
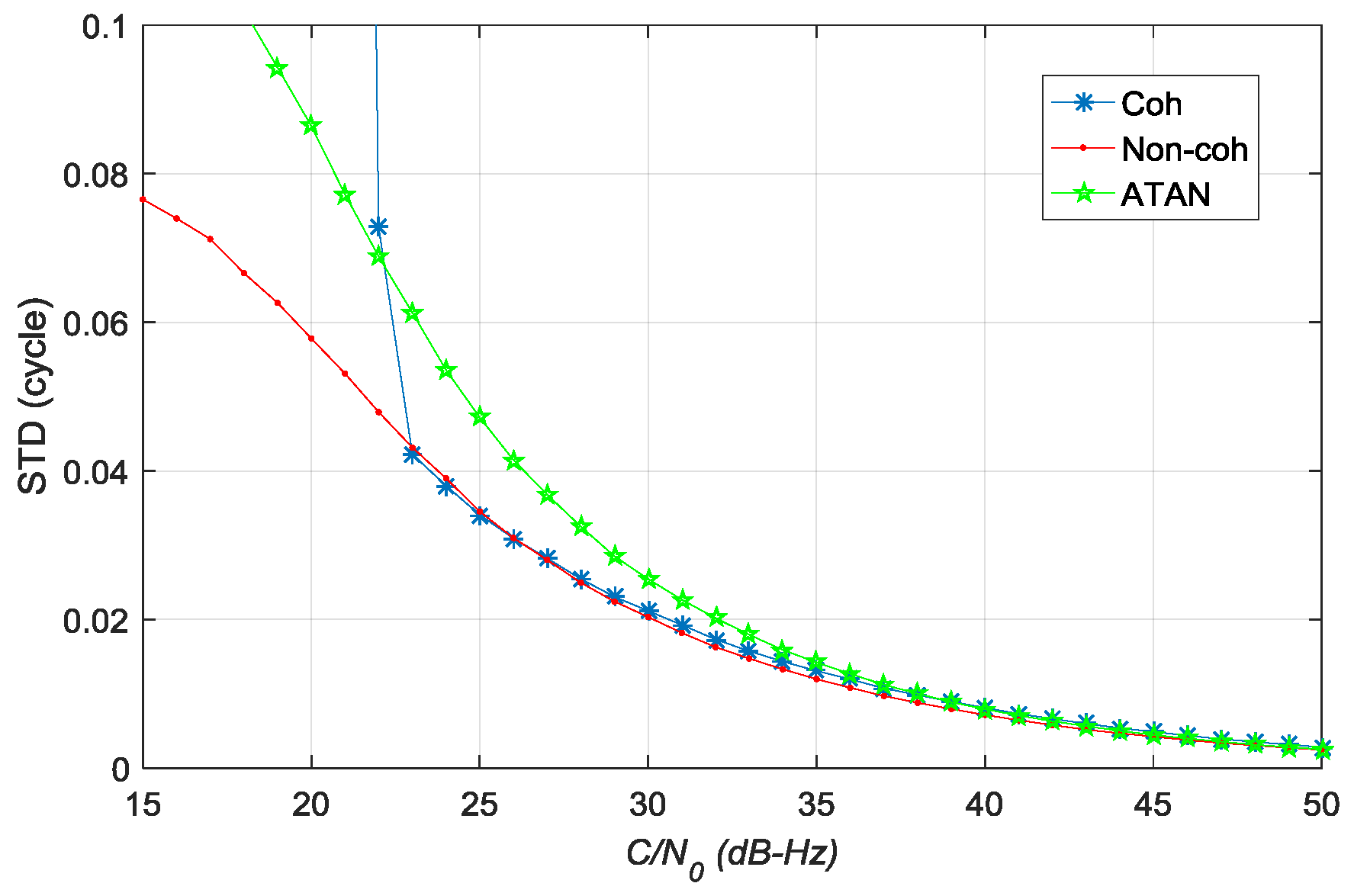
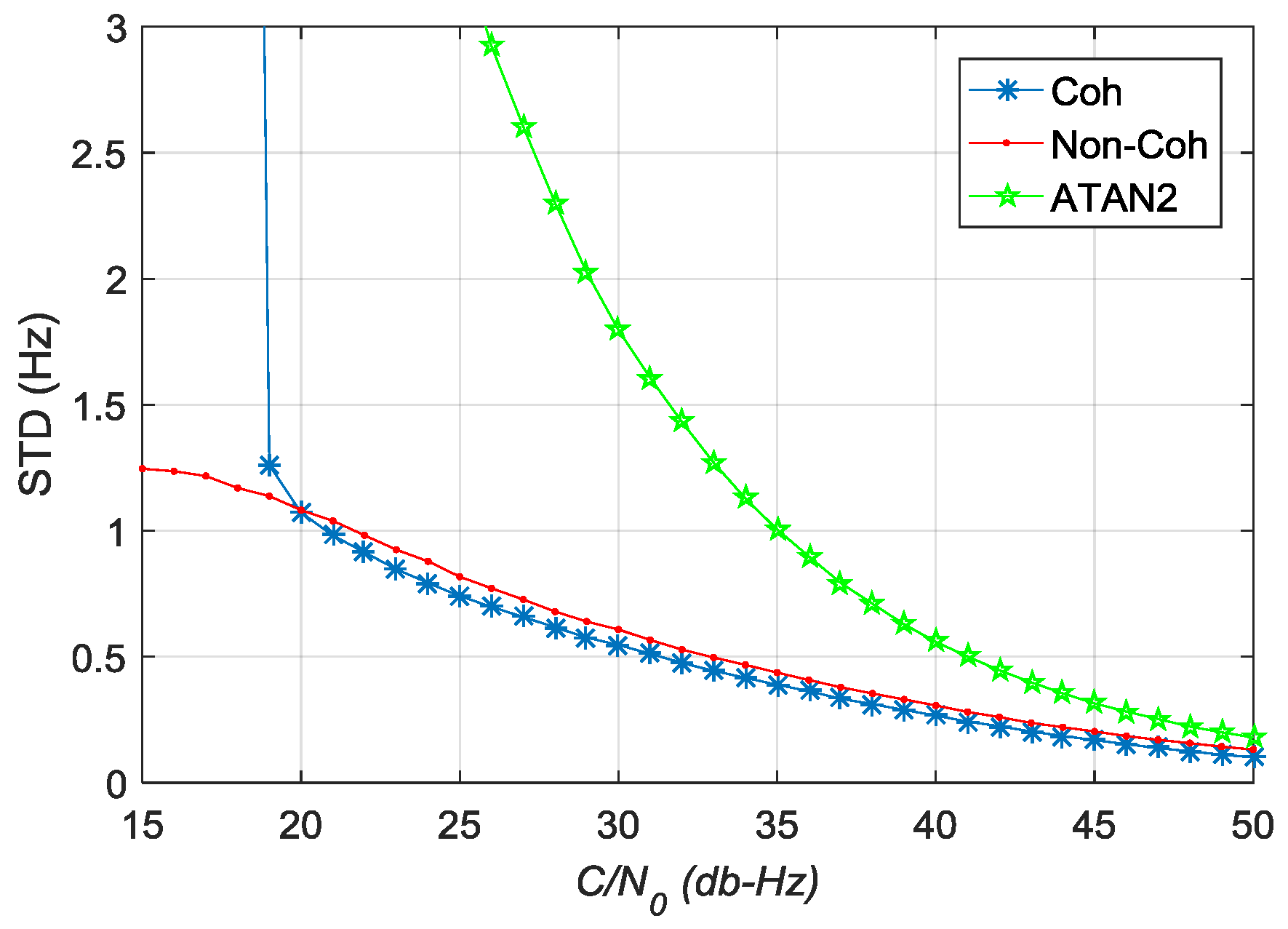
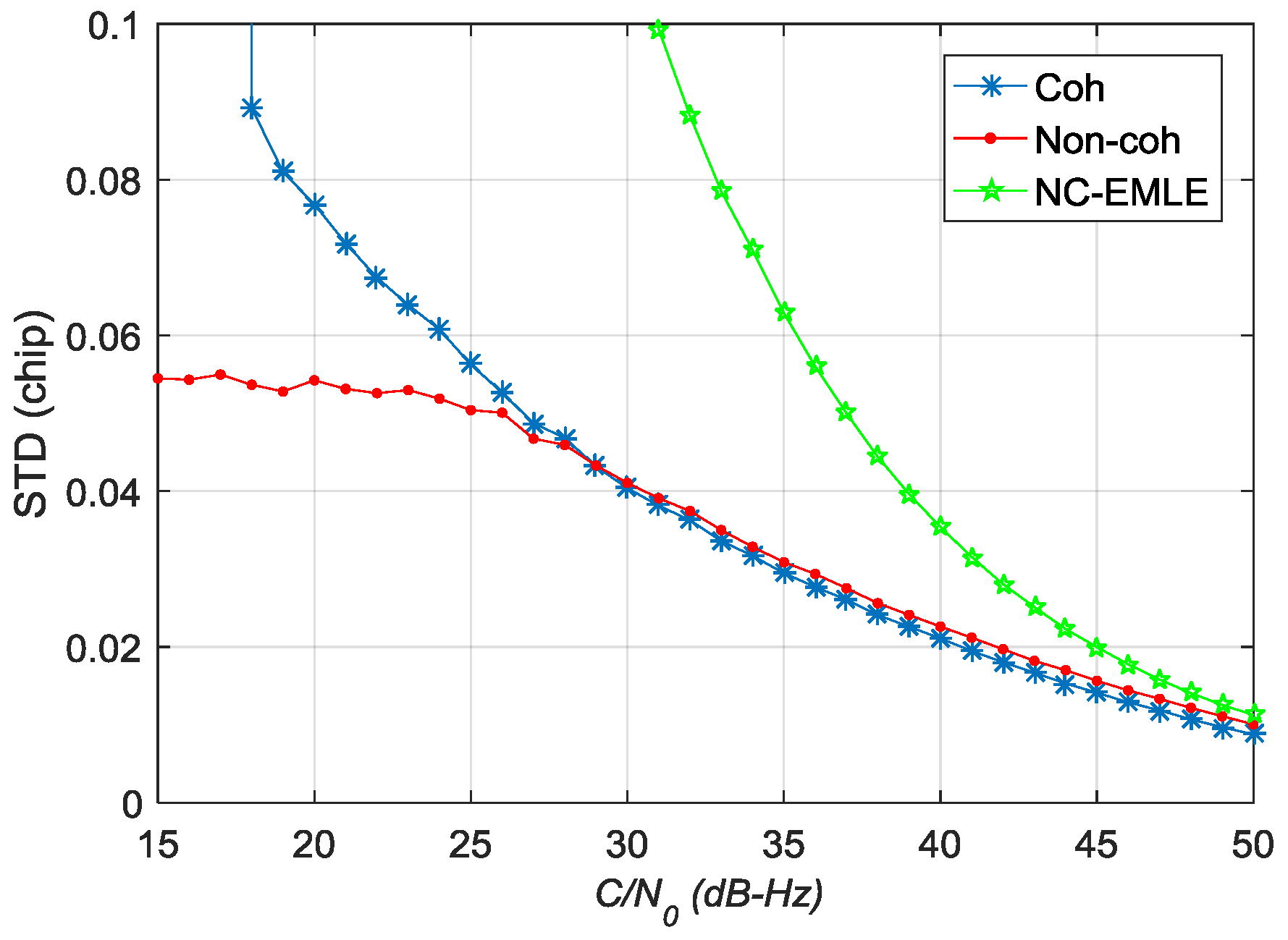
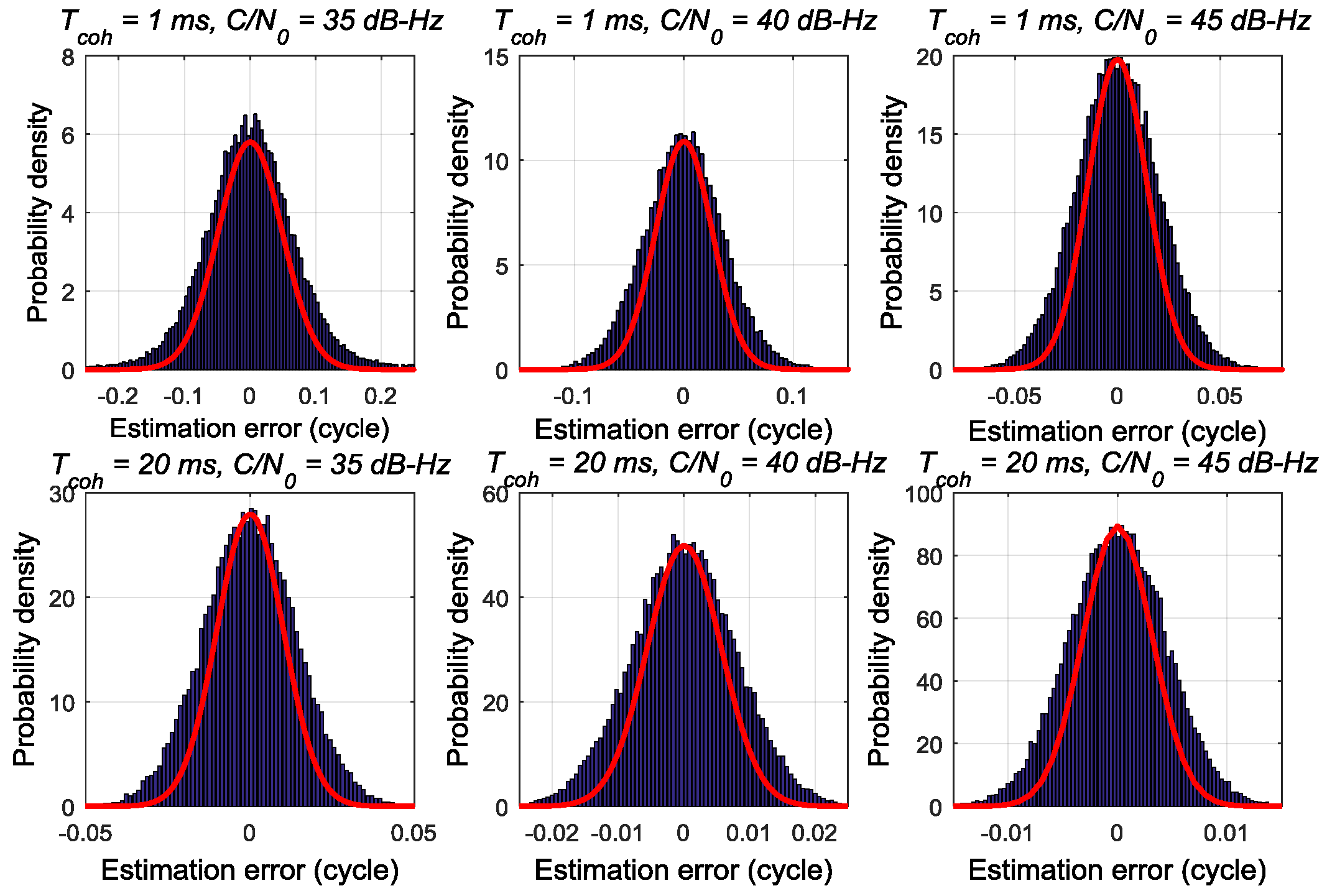
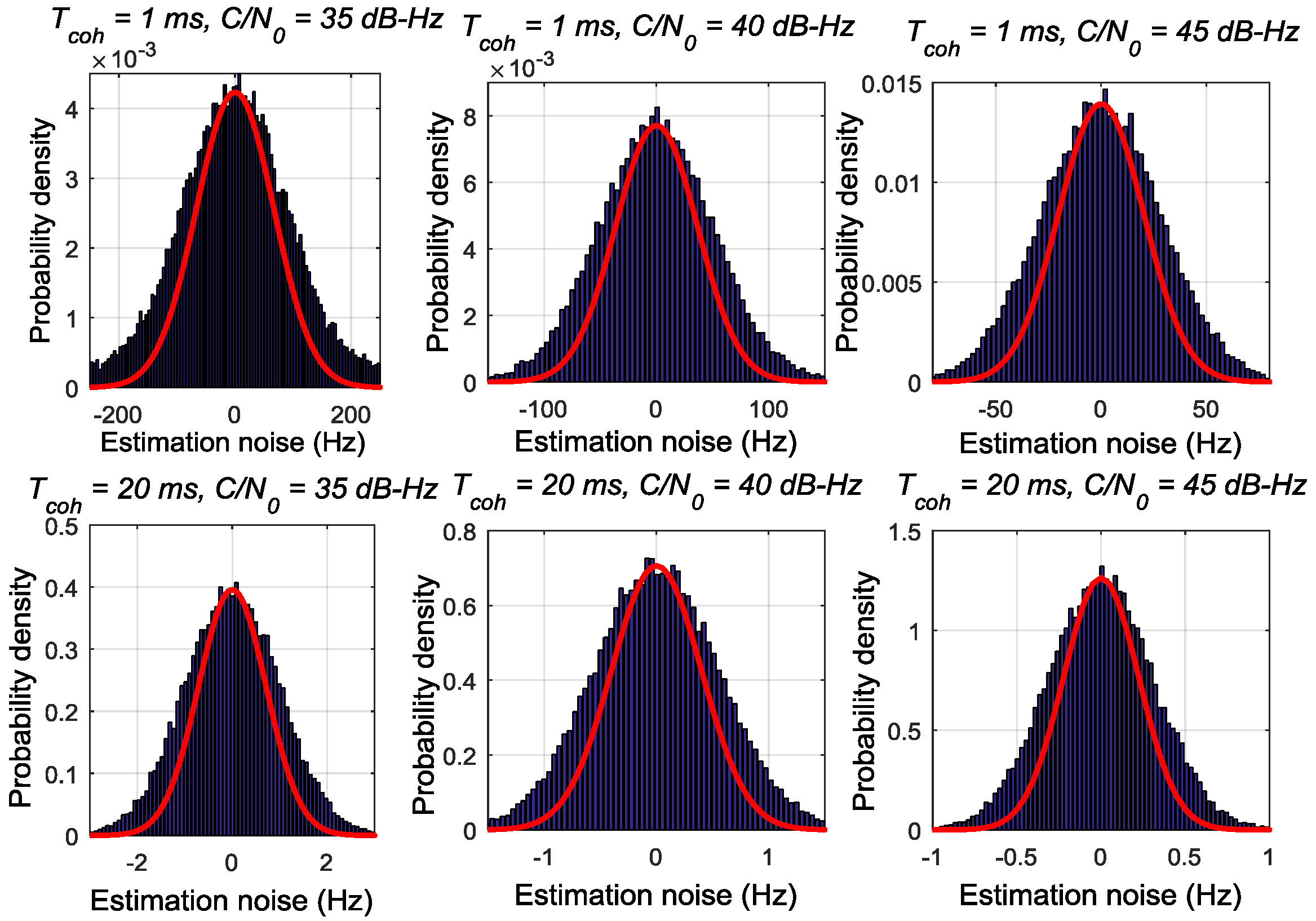
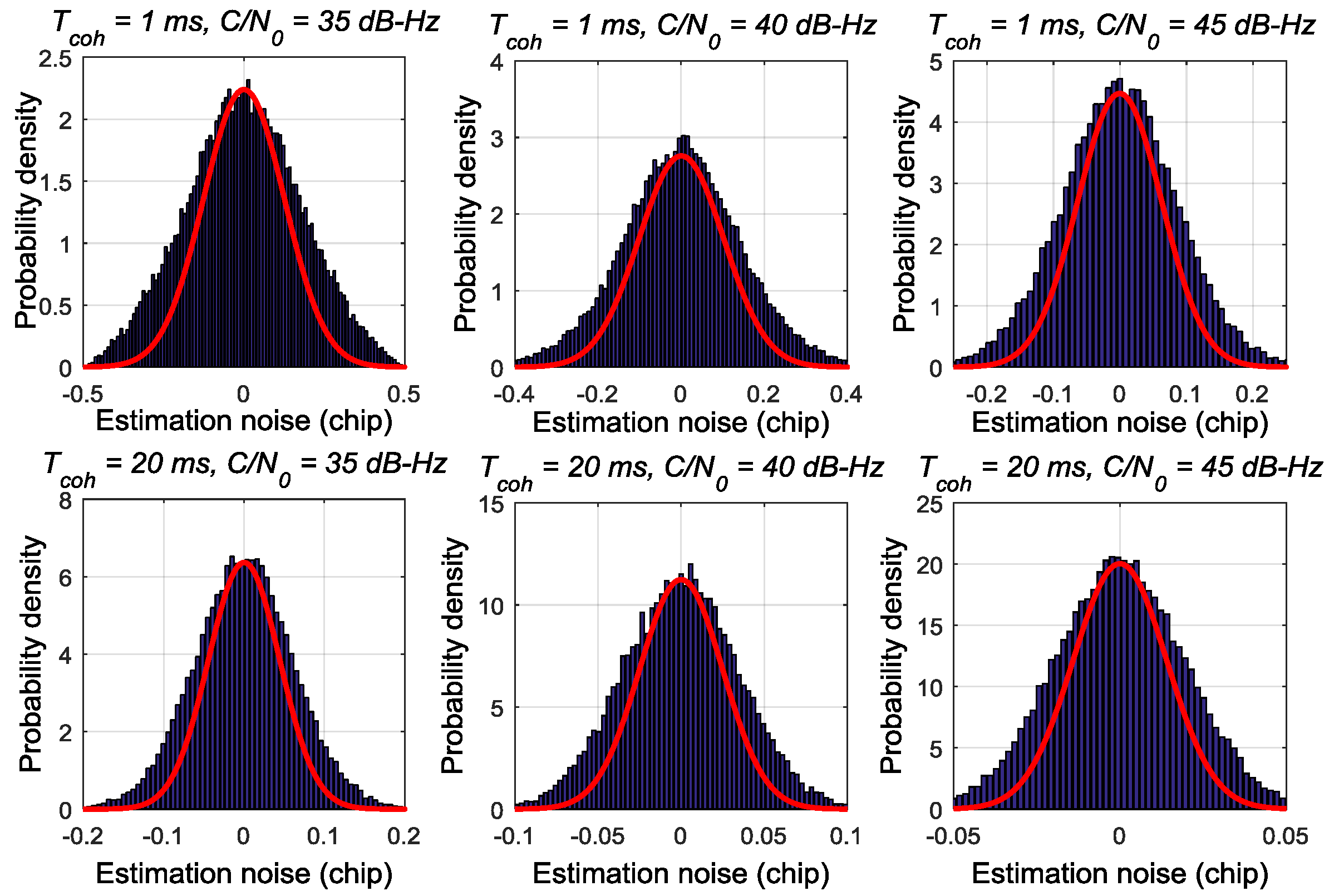
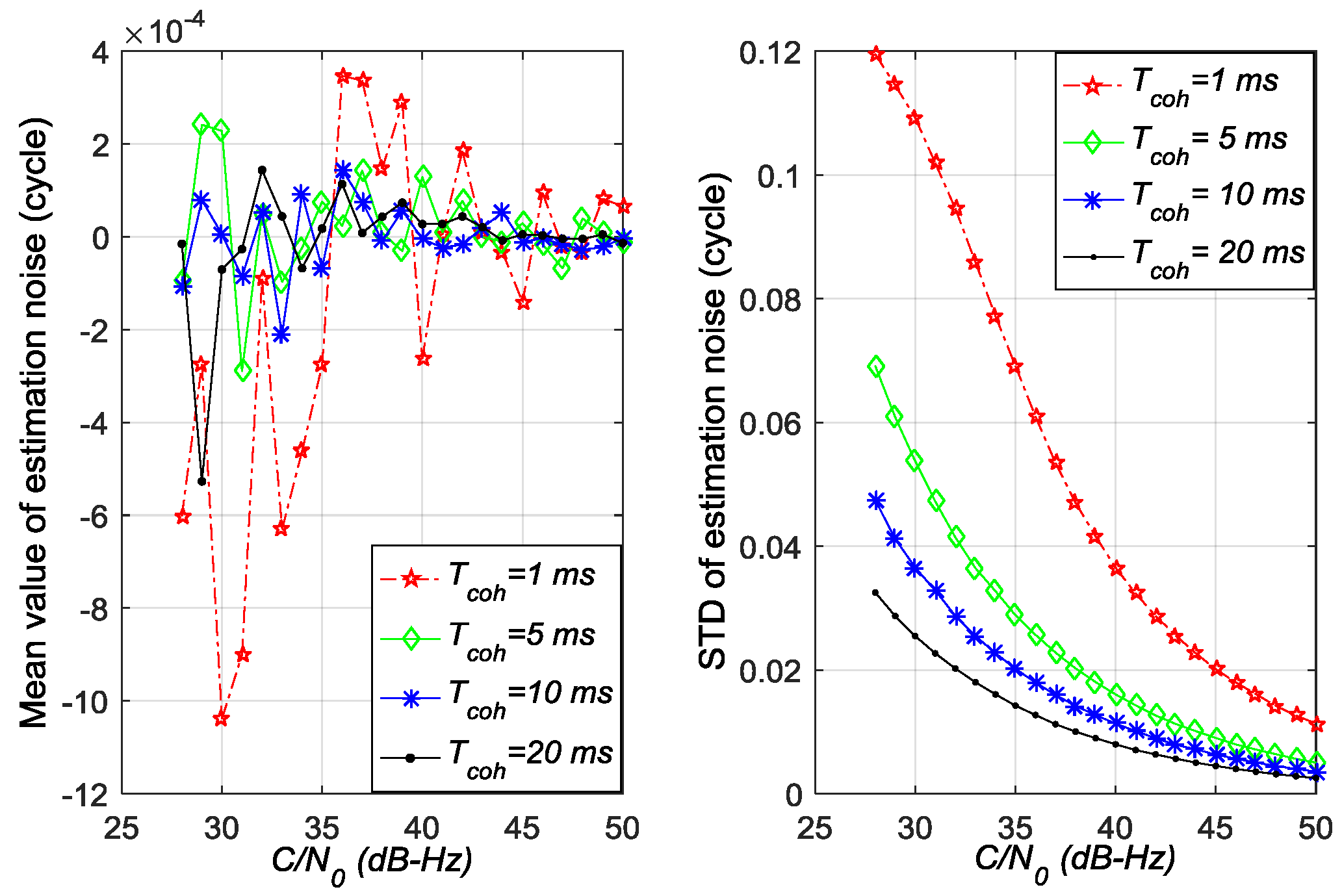
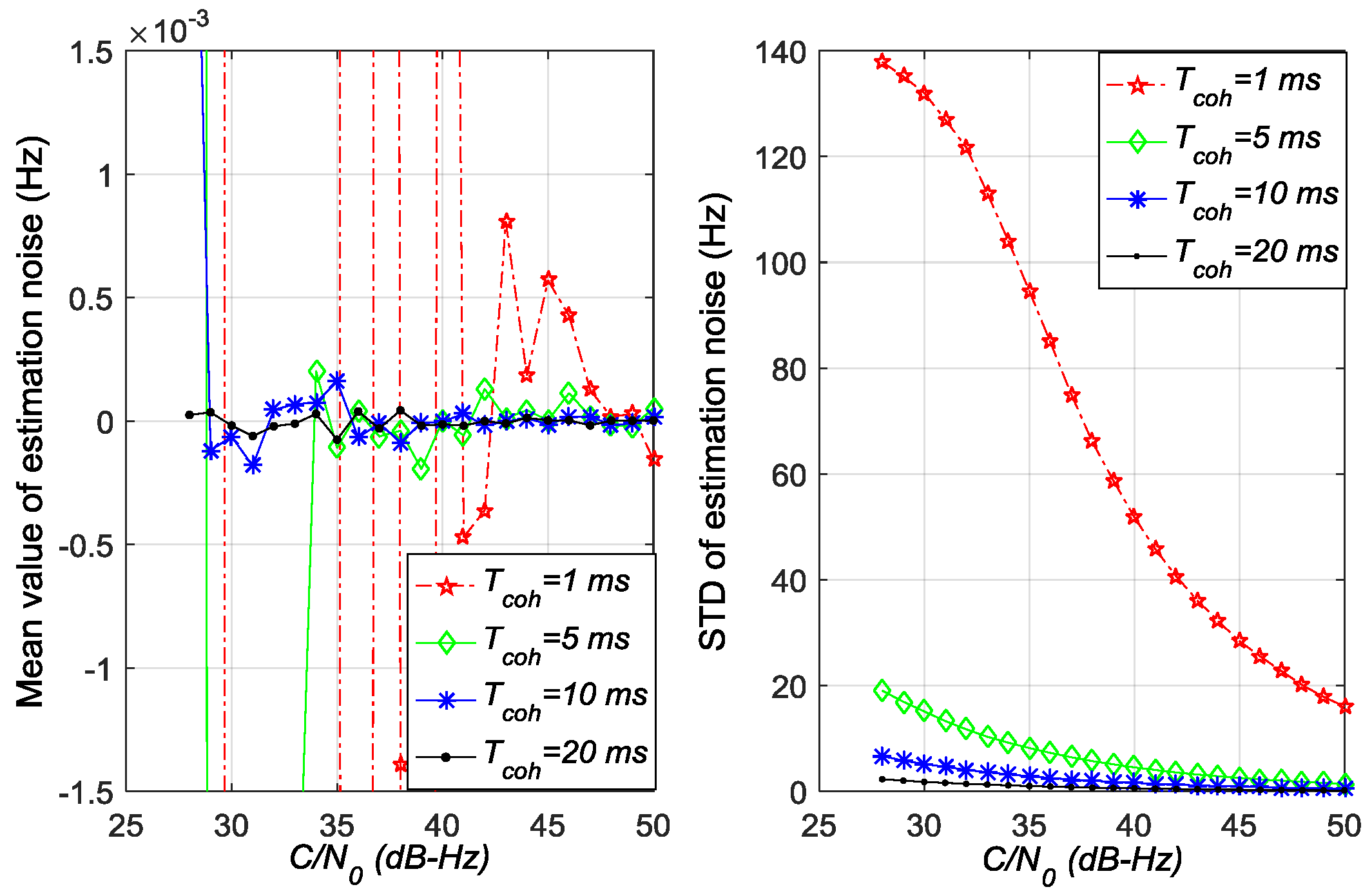
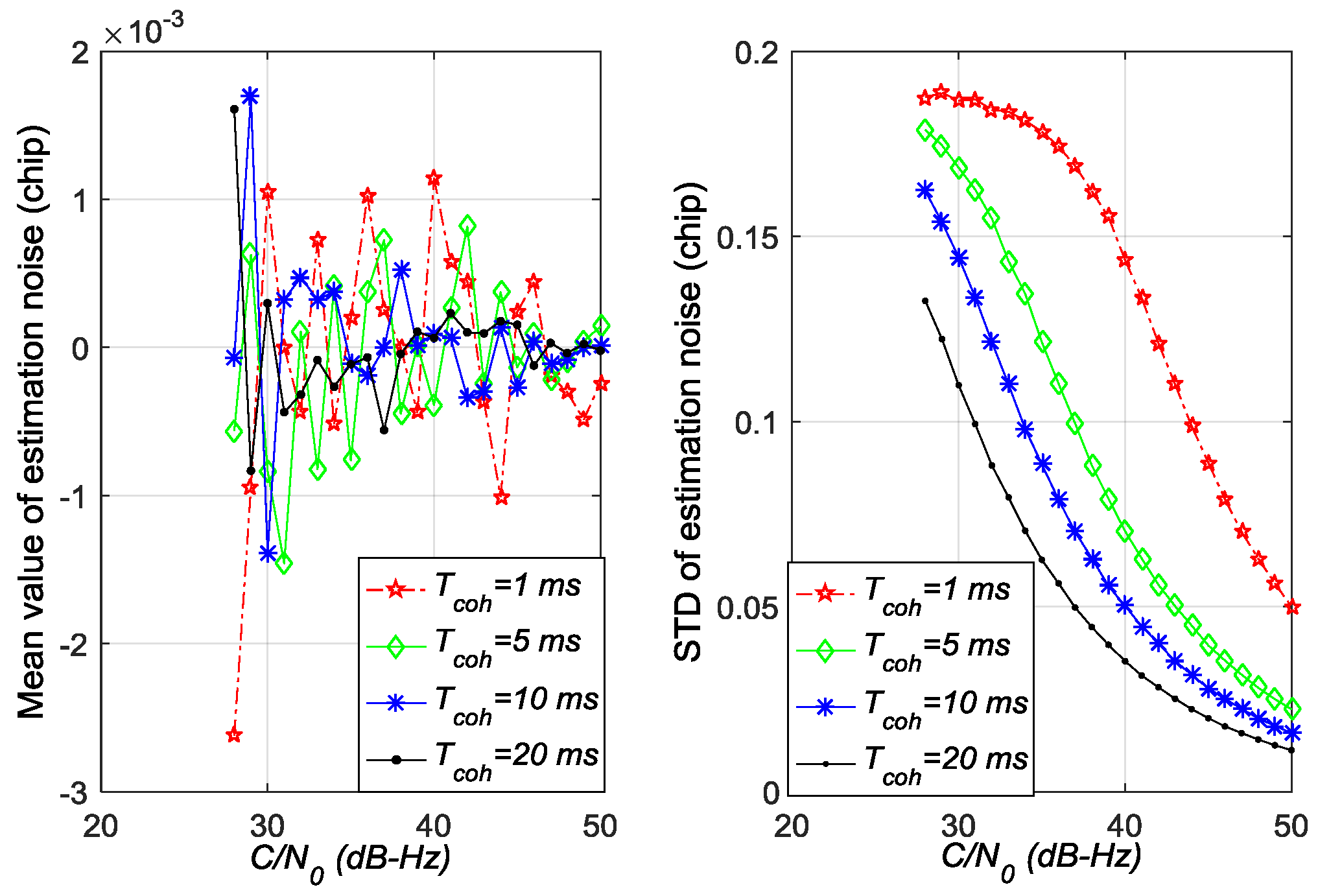
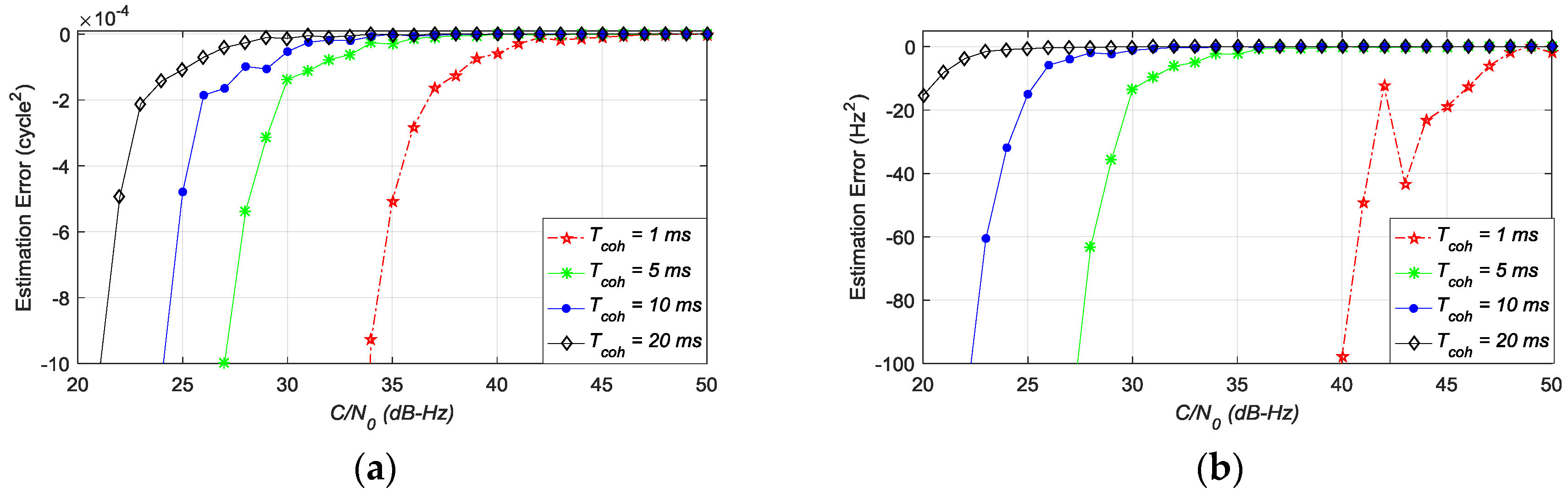
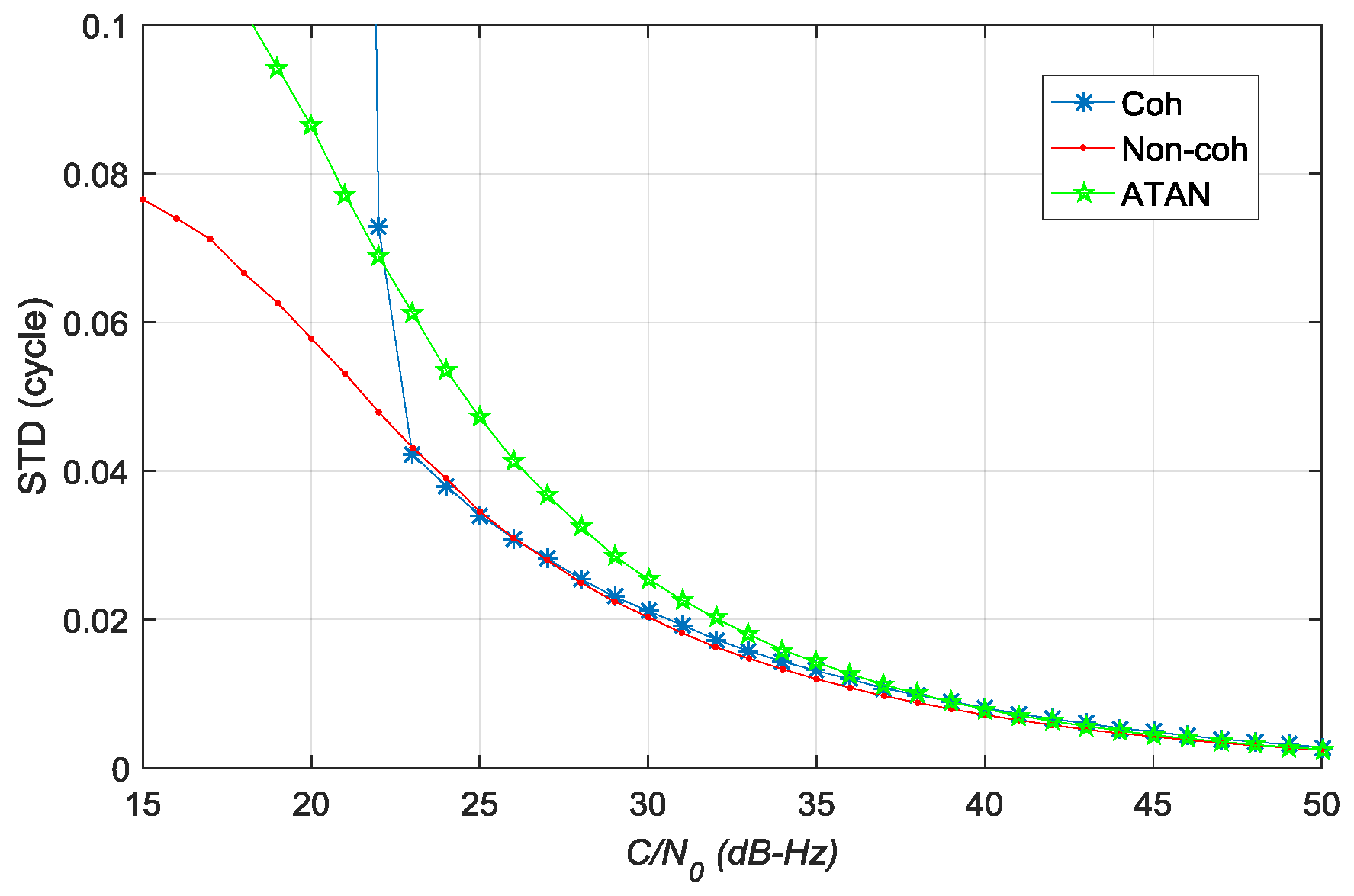
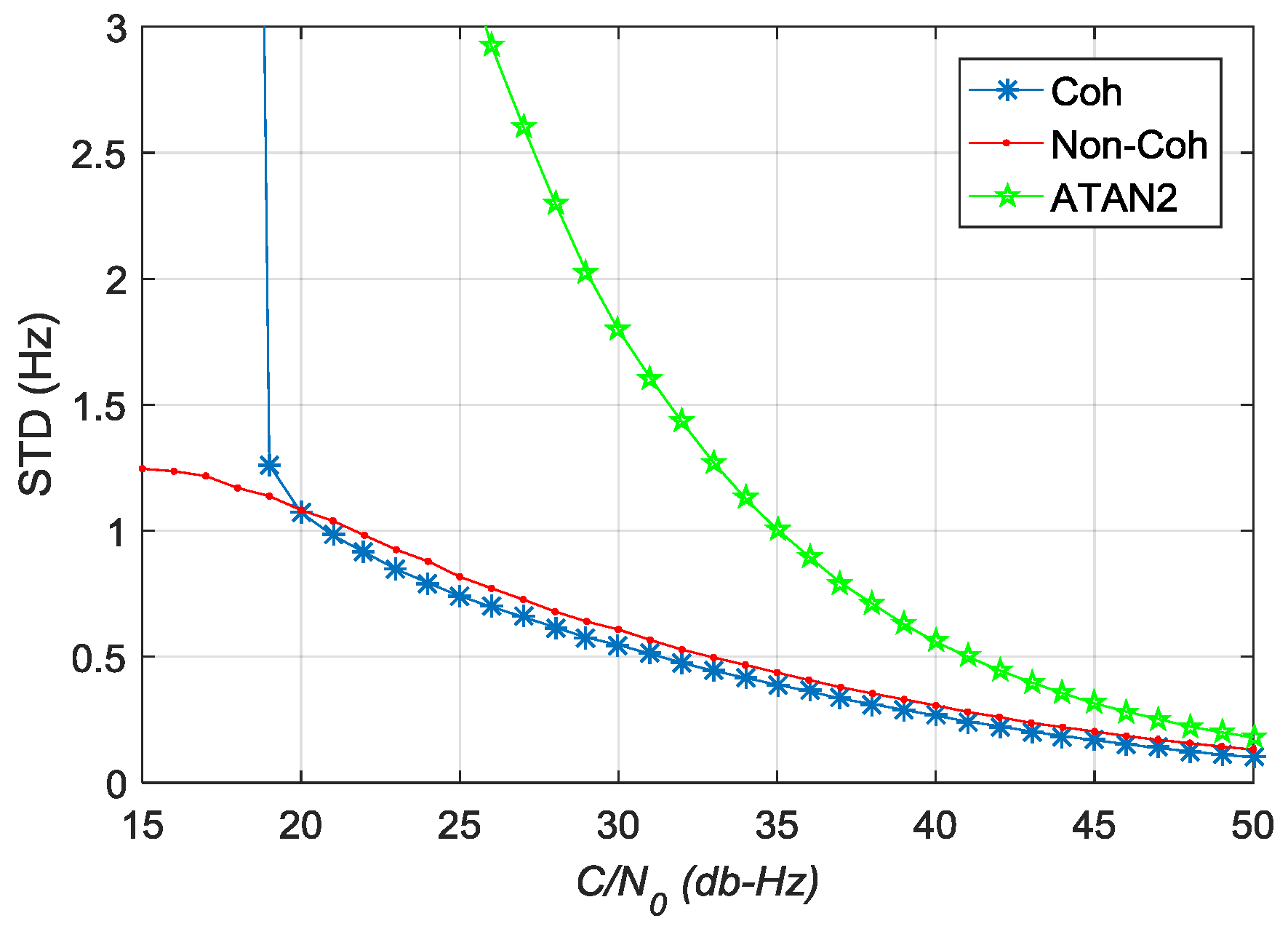
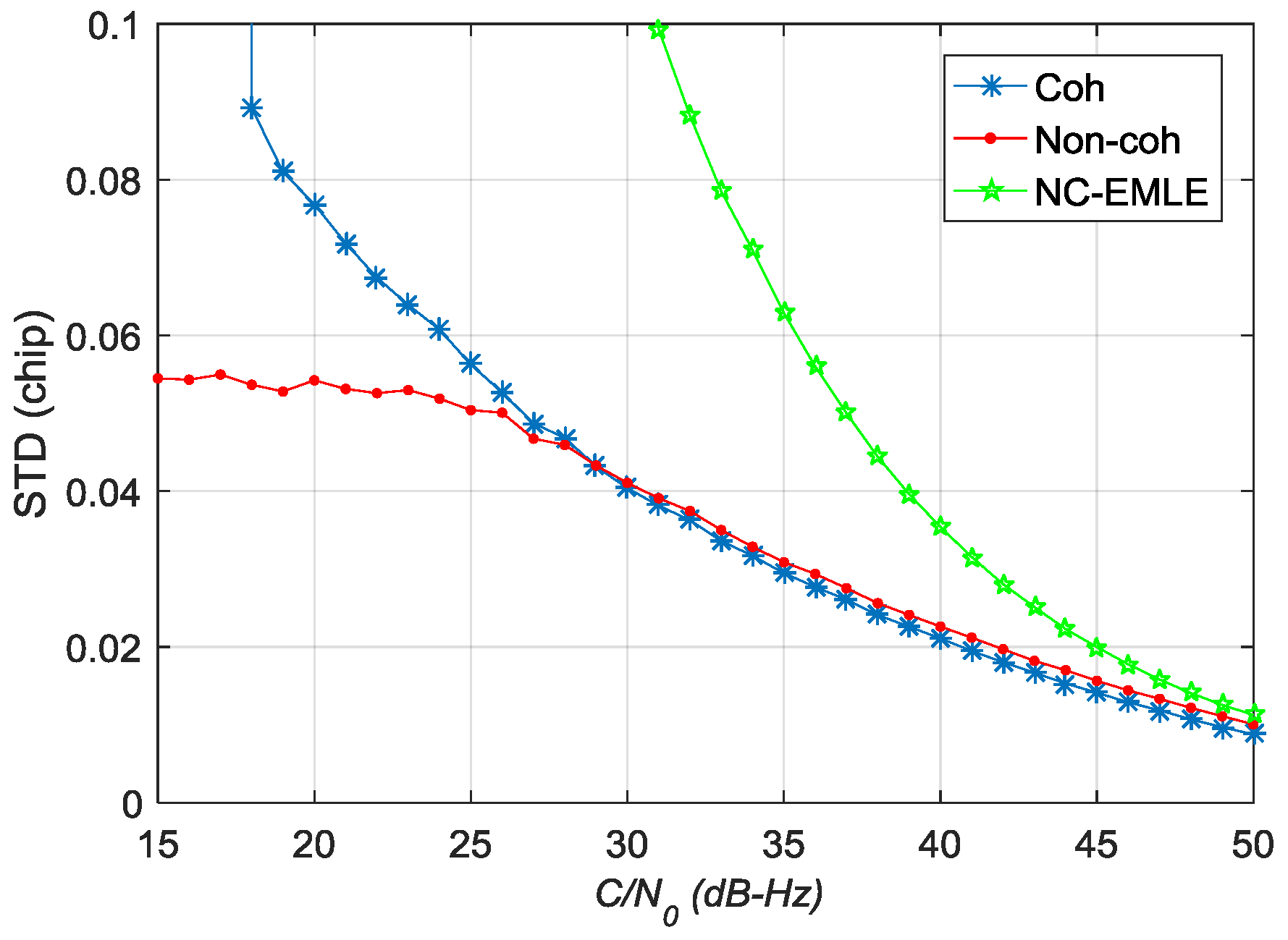
4.4. Estimation Accuracy Evaluation Under Various C/N0
5. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. The Derivation and Definition of Pcross, Pdot, B(n), C1(n), C2(n)
Appendix B. Derivation of Estimation Noise Variance of ATAN2 FLL Discriminator
Appendix C. C/N0 Estimation of GNSS Signals
References
- Enge, P.K. The Global Positioning System: Signals, measurements, and performance. Int. J. Wirel. Inf. Netw. 1994, 1, 83–105. [Google Scholar] [CrossRef]
- Gao, Z.; Zhang, H.; Zhao, Q.; Hu, Z.; Shen, W. Analyzing the Impact of Satellite Clock-TGD Coupled Error on BDS Positioning Accuracy. In Proceedings of the China Satellite Navigation Conference (CSNC), Nanjing, China, 21–23 May 2014; Springer: Berlin/Heidelberg, Germany, 2014; Volume I, pp. 267–278. [Google Scholar]
- Bhatta, B. Global Navigation Satellite Systems: Insights into GPS, GLONASS, Galileo, Compass and Others; CRC Press, Inc.: Boca Raton, FL, USA, 2011; pp. 1–40. [Google Scholar]
- Jing, Y.; Zeng, A.; Xu, T. Fusion Positioning of BDS/GPS Based on Variance Component Estimation and Its Application for Geodetic Control Network. In Proceedings of the China Satellite Navigation Conference (CSNC), Nanjing, China, 21–23 May 2014; Springer: Berlin/Heidelberg, Germany, 2014; Volume I, pp. 115–123. [Google Scholar]
- The Performance Specification of Open Service of Beidou Satellite Navigation System (V 1.0). Available online: http://www.beidou.gov.cn/attach/2013/12/26/20131226fe8b20aad5f34091a6f8a84b08b1c4b1.pdf (accessed on 26 December 2013).
- Lee, S.; Tewolde, G.; Kwon, J. Design and implementation of vehicle tracking system using GPS/GSM/GPRS technology and smartphone application. IEEE Internet Things 2014, 16, 353–358. [Google Scholar]
- Blomenhofer, H. GNSS in the 21st century—The user perspective. Acta Astronaut. 2004, 54, 965–968. [Google Scholar] [CrossRef]
- Konno, H. Design of an Aircraft Landing System Using Dual-Frequency GNSS. Ph.D. Thesis, Stanford University, Stanford, CA, USA, December 2007. [Google Scholar]
- Xie, G. Principles of GPS and Receiver Design; Publishing House of Electronics Industry: Beijing, China, 2009; pp. 16–32. [Google Scholar]
- Misra, P.; Enge, P. Global Positioning System: Signals, Measurements, and Performance, 2nd ed.; Ganga-Jamuna Press: Lincoln, MA, USA, 2011; pp. 433–497. [Google Scholar]
- Kaplan, E.; Hegarty, C. Understanding GPS: Principles and Applications; Artech House: Boston, MA, USA, 2005. [Google Scholar]
- Luo, Y.; Wu, W.; Babu, R.; Tang, K.; Luo, B. A Simplified Baseband Prefilter Model with Adaptive Kalman Filter for Ultra-Tight COMPASS/INS Integration. Sensors 2012, 12, 9666–9686. [Google Scholar] [CrossRef] [PubMed]
- Won, J.H.; Dötterböck, D.; Eissfeller, B. Performance Comparison of Different Forms of Kalman Filter Approaches for a Vector-Based GNSS Signal Tracking Loop. Navigation 2010, 57, 185–199. [Google Scholar] [CrossRef]
- Hwang, D.B.; Lim, D.W.; Cho, S.L.; Lee, S.J. Unified approach to ultra-tightly-coupled GPS/INS integrated navigation system. IEEE Aerosp. Electron. Syst. Mag. 2011, 26, 30–38. [Google Scholar] [CrossRef]
- Won, J.H.; Eissfeller, B.; Pany, T. Implementation, Test and Validation of a Vector-Tracking-Loop with the ipex Software Receiver. In Proceedings of the 24th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2011), Portland, OR, USA, 20–23 September 2011; pp. 795–802. [Google Scholar]
- Zhao, S.; Akos, D. An Open Source GPS/GNSS Vector Tracking Loop—Implementation, Filter Tuning, and Results. In Proceedings of the 2011 International Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 24–26 January 2011; pp. 1293–1305. [Google Scholar]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, 2nd ed.; Artech House: Norwood, MA, USA, 2008. [Google Scholar]
- Groves, P.D.; Mather, C.J.; Macaulay, A.A. Demonstration of Non-coherent Deep INS/GPS Integration for Optimised Signal-to-Noise Performance. In Proceedings of the 20th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2007), Fort Worth, TX, USA, 25–28 September 2007; pp. 2627–2638. [Google Scholar]
- Wu, M.; Ding, J.; Zhao, L.; Kang, Y.; Luo, Z. Design and Performance Evaluation of an Adaptive Hybrid Coherent and Non-Coherent GNSS Vector Tracking Loop. In Proceedings of the 2017 International Technical Meeting of the Institute of Navigation, Monterey, CA, USA, 30 January–2 February 2017; pp. 1129–1146. [Google Scholar]
- Jeon, S.; Park, M.; Shin, B.; Kee, C.; Kim, C.; So, H.; Jang, J.; Lee, K.; Song, K. Performance Evaluation of LQG based Optimal GNSS Tracking Loop Using Non-Linear Measurements. In Proceedings of the 2017 International Technical Meeting of the Institute of Navigation, Monterey, CA, USA, 30 January–2 February 2017; pp. 401–417. [Google Scholar]
- Jeon, S.; Kim, C.; Kim, G.; Kim, O.; Kee, C. Optimal signal tracking algorithm for GNSS signal using moving set-point LQG system. Int. J. Control Autom. Syst. 2013, 11, 1214–1222. [Google Scholar] [CrossRef]
- Ward, P.W. Performance Comparisons Between FLL, PLL and a Novel FLL-Assisted-PLL Carrier Tracking Loop Under RF Interference Conditions. In Proceedings of the 11th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1998), Nashville, TN, USA, 15–18 September 1998; pp. 783–795. [Google Scholar]
- O’Driscoll, C.; Lachapelle, G. Comparison of Traditional and Kalman Filter Based Tracking Architectures. In Proceedings of the European Navigation Conference, Naples, Italy, 3–6 May 2009; pp. 1–10. [Google Scholar]
- Kamel, A.M. Design and Testing of an Intelligent GPS Tracking Loop for Noise Reduction and High Dynamics Applications. In Proceedings of the 23rd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2010), Portland, OR, USA, 21–24 September 2010; pp. 3235–3243. [Google Scholar]
- Mao, W.L.; Tsao, H.W.; Chang, F.R. Intelligent GPS receiver for robust carrier phase tracking in kinematic environments. IEE Proc. Radar Sonar Navig. 2004, 151, 171–180. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal | Useful Signal | Noise | Noise Distribution |
|---|---|---|---|
| Gaussian white noise | |||
| White noise with unknown distribution | |||
| White noise with unknown distribution | |||
| Tracking Error Estimation Method | Root Mean Square of Estimation Error for Tracking Error | ||
|---|---|---|---|
| Carrier Phase Error (cycle) | Carrier Frequency Error (Hz) | Code Phase Error (chip) | |
| Discriminator | 0.023002 | 32.4045 | 0.1715 |
| Coherent pre-filter | 0.007829 | 0.7464 | 0.0237 |
| Non-coherent pre-filter | 0.009757 | 0.8930 | 0.0322 |
| Tracking Error Estimation Method | Root Mean Square of Estimation Error for Tracking Error | ||
|---|---|---|---|
| Carrier Phase Error (cycle) | Carrier Frequency Error (Hz) | Code Phase Error (chip) | |
| Discriminator | 0.35206 | 28.2365 | 0.08783 |
| Coherent pre-filter | 0.05035 | 0.40724 | 0.00723 |
| Non-coherent pre-filter | 0.05475 | 0.43523 | 0.00813 |
| Tracking Error Estimation Method | Root Mean Square of Estimation Error for Tracking Error | ||
|---|---|---|---|
| Carrier phase Error (cycle) | Carrier Frequency Error (Hz) | Code Phase Error (chip) | |
| Discriminator | 0.30656 | 27.81829 | 0.08758 |
| Coherent pre-filter | 0.26179 | 2.00818 | 0.07386 |
| Non-coherent pre-filter | 0.15270 | 1.04078 | 0.03666 |
| C/N0 (dB-Hz) | Accuracy Comparison |
|---|---|
| [38.7, 50] | Non-coh > ATAN > Coh |
| [26, 38.7] | Non-coh > Coh > ATAN |
| [23, 26] | Coh > Non-coh > ATAN |
| [15, 23] | Non-coh > ATAN > Coh |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, Z.; Ding, J.; Zhao, L.; Wu, M. An Enhanced Non-Coherent Pre-Filter Design for Tracking Error Estimation in GNSS Receivers. Sensors 2017, 17, 2668. https://doi.org/10.3390/s17112668
Luo Z, Ding J, Zhao L, Wu M. An Enhanced Non-Coherent Pre-Filter Design for Tracking Error Estimation in GNSS Receivers. Sensors. 2017; 17(11):2668. https://doi.org/10.3390/s17112668
Chicago/Turabian StyleLuo, Zhibin, Jicheng Ding, Lin Zhao, and Mouyan Wu. 2017. "An Enhanced Non-Coherent Pre-Filter Design for Tracking Error Estimation in GNSS Receivers" Sensors 17, no. 11: 2668. https://doi.org/10.3390/s17112668
APA StyleLuo, Z., Ding, J., Zhao, L., & Wu, M. (2017). An Enhanced Non-Coherent Pre-Filter Design for Tracking Error Estimation in GNSS Receivers. Sensors, 17(11), 2668. https://doi.org/10.3390/s17112668