Computational Experiments on the Step and Frequency Responses of a Three-Axis Thermal Accelerometer


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Steady-State Step Response
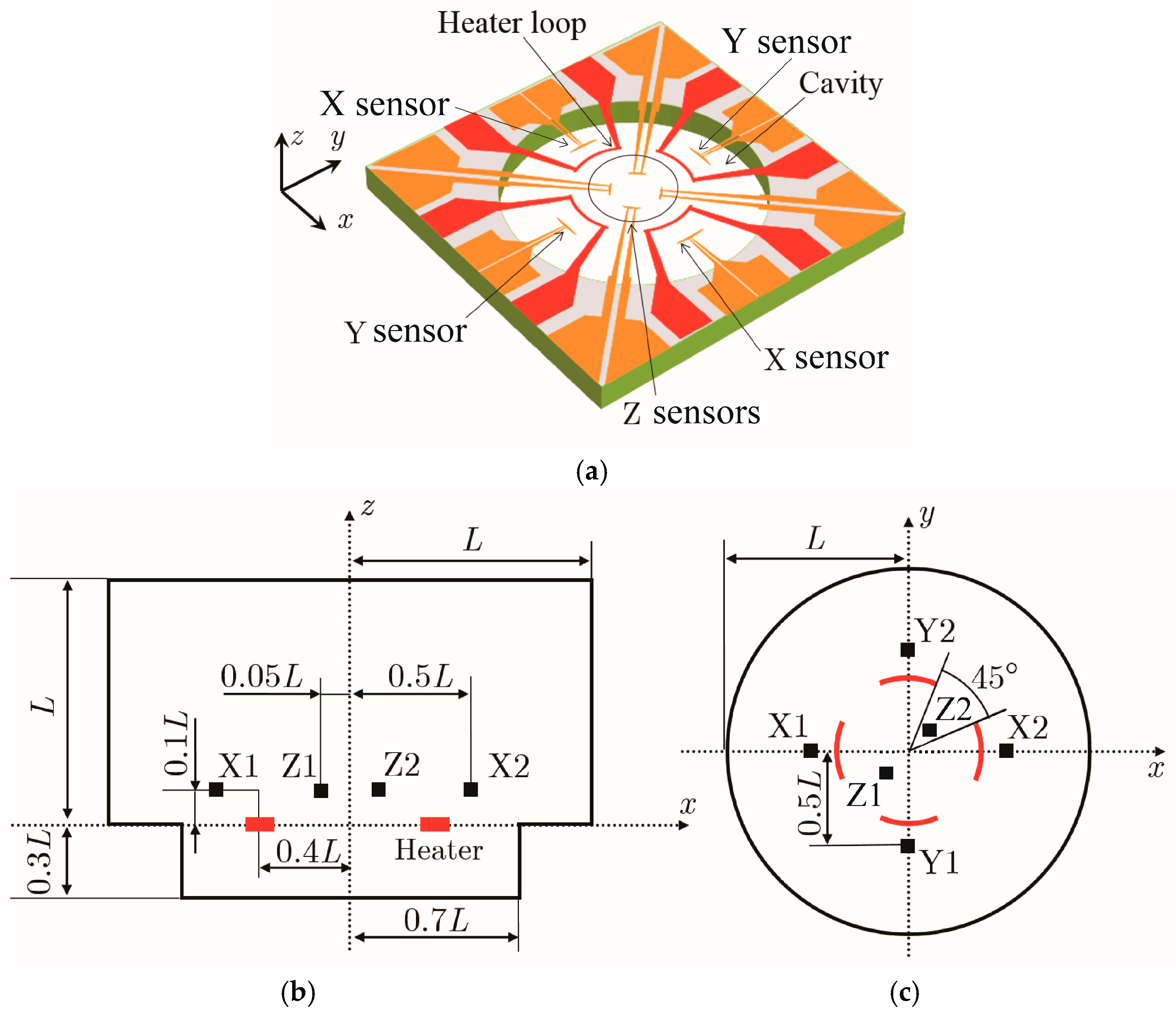
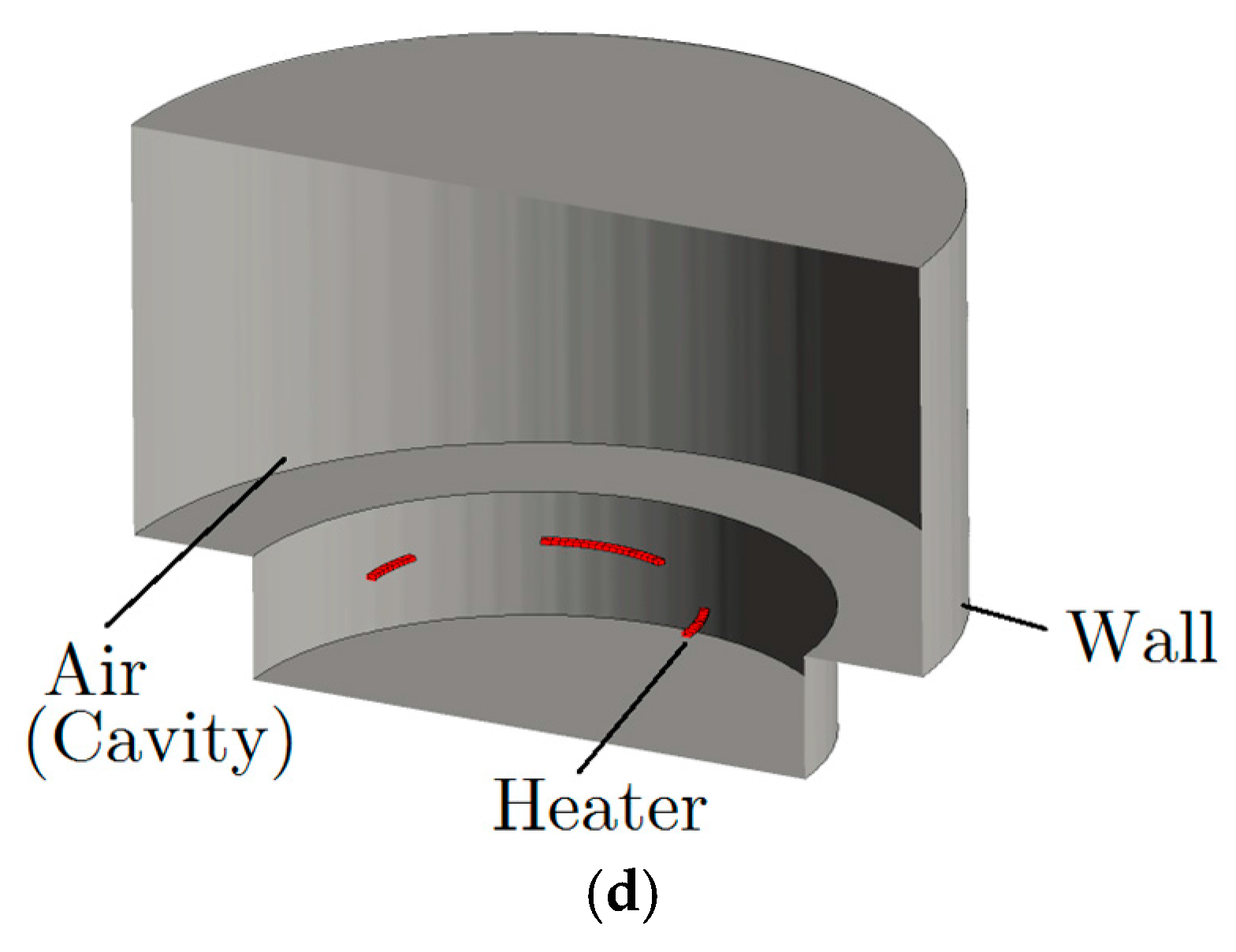
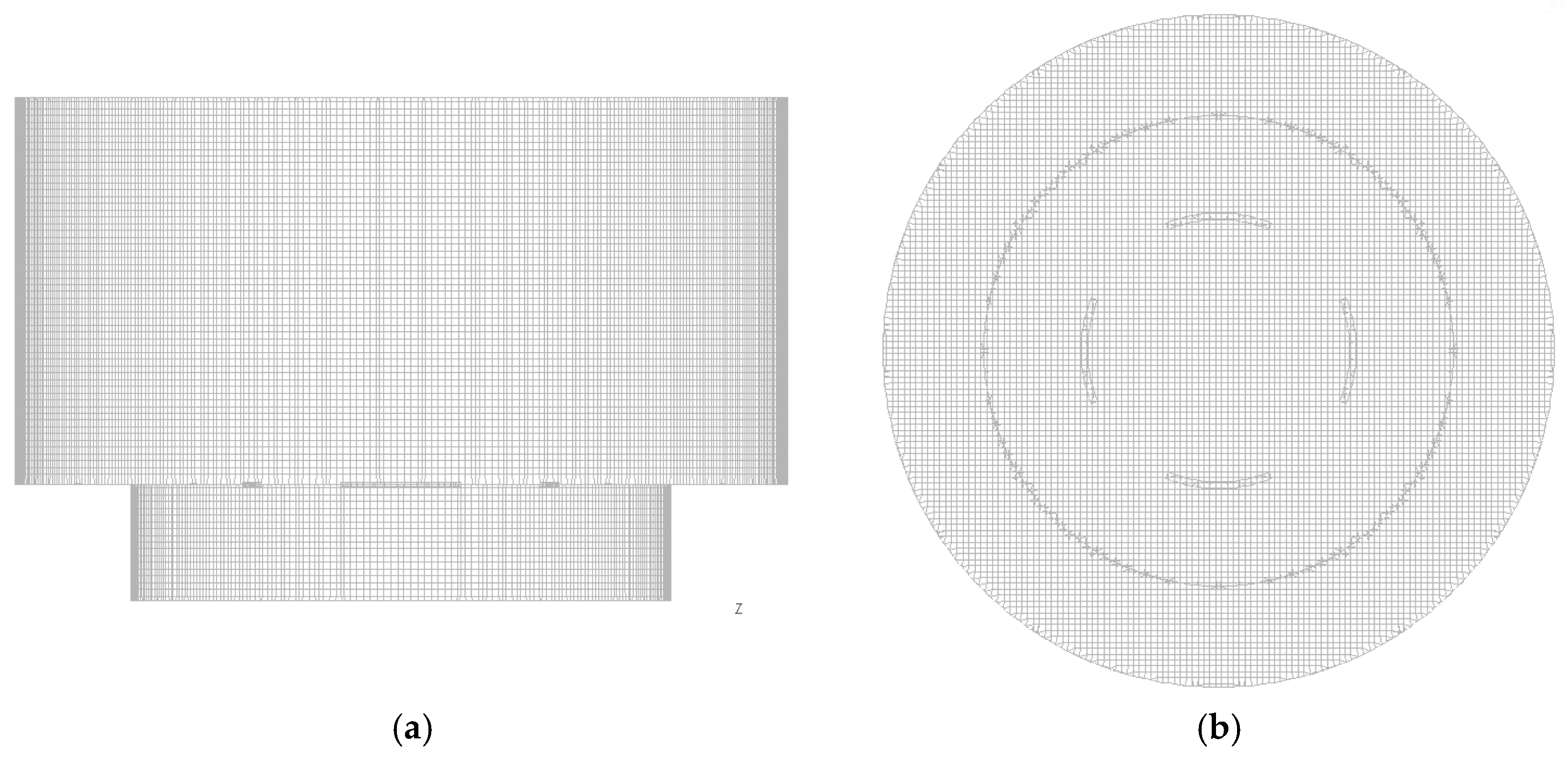
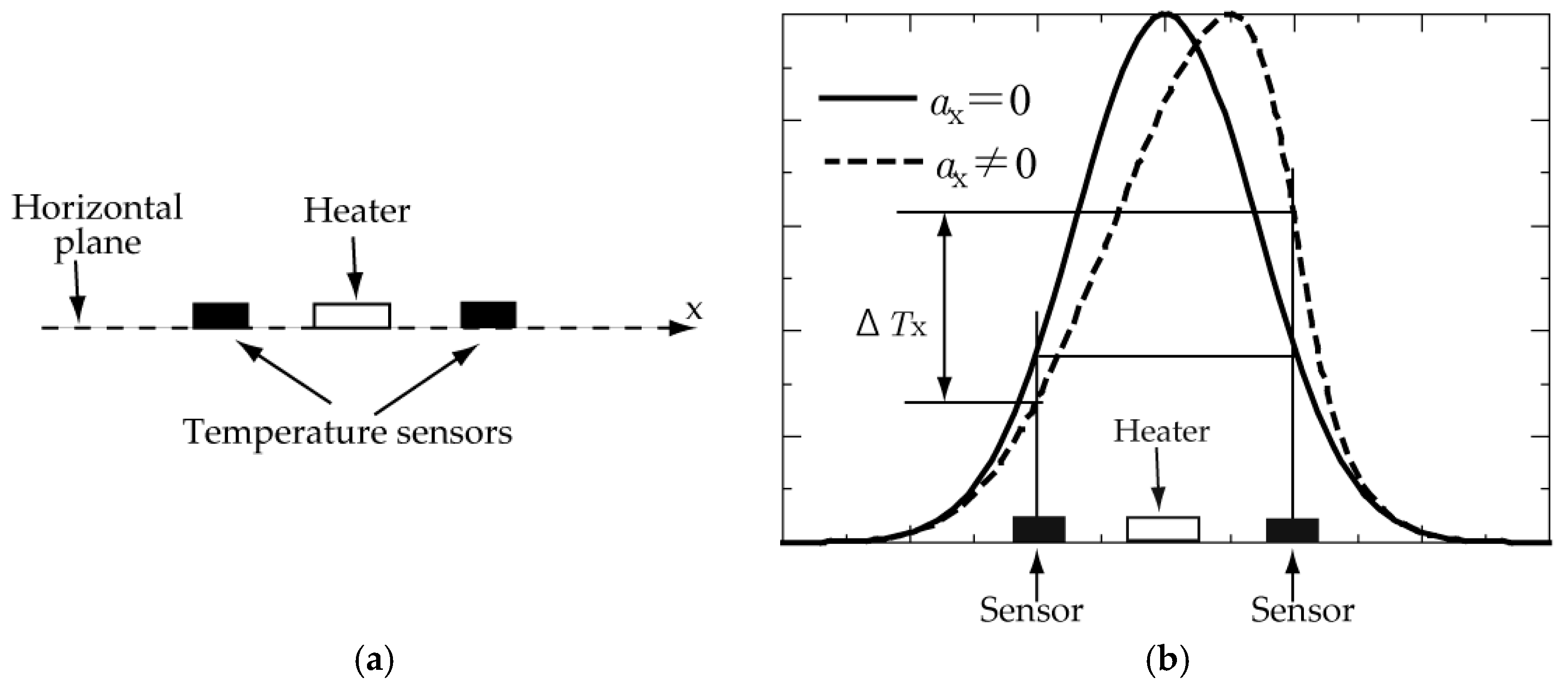
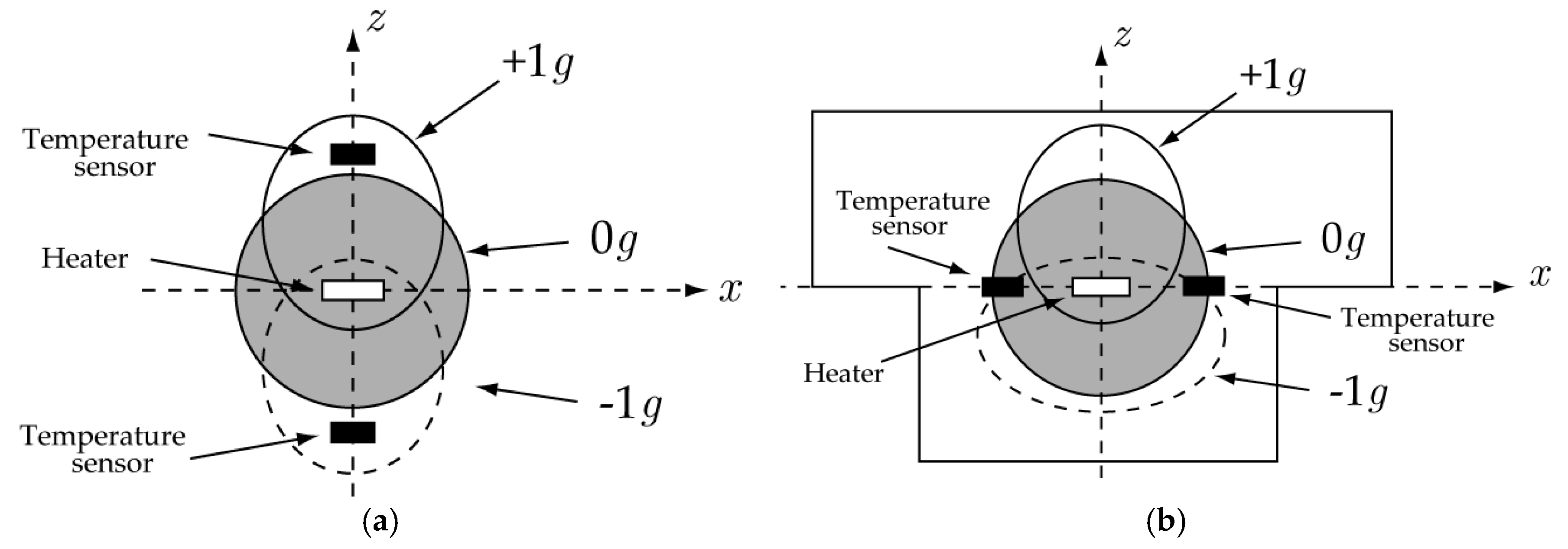
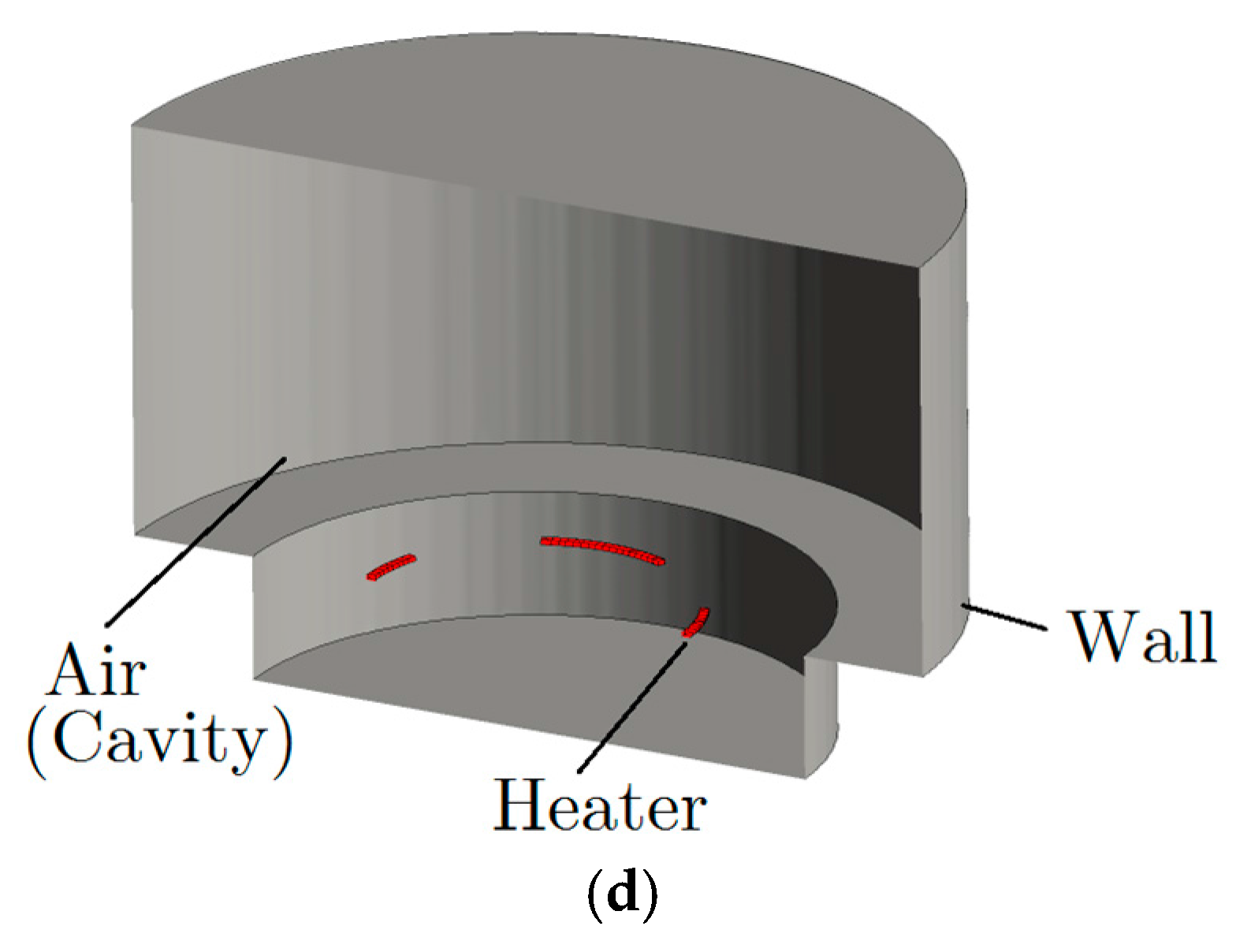
2.1. Computational Model of the Accelerometer
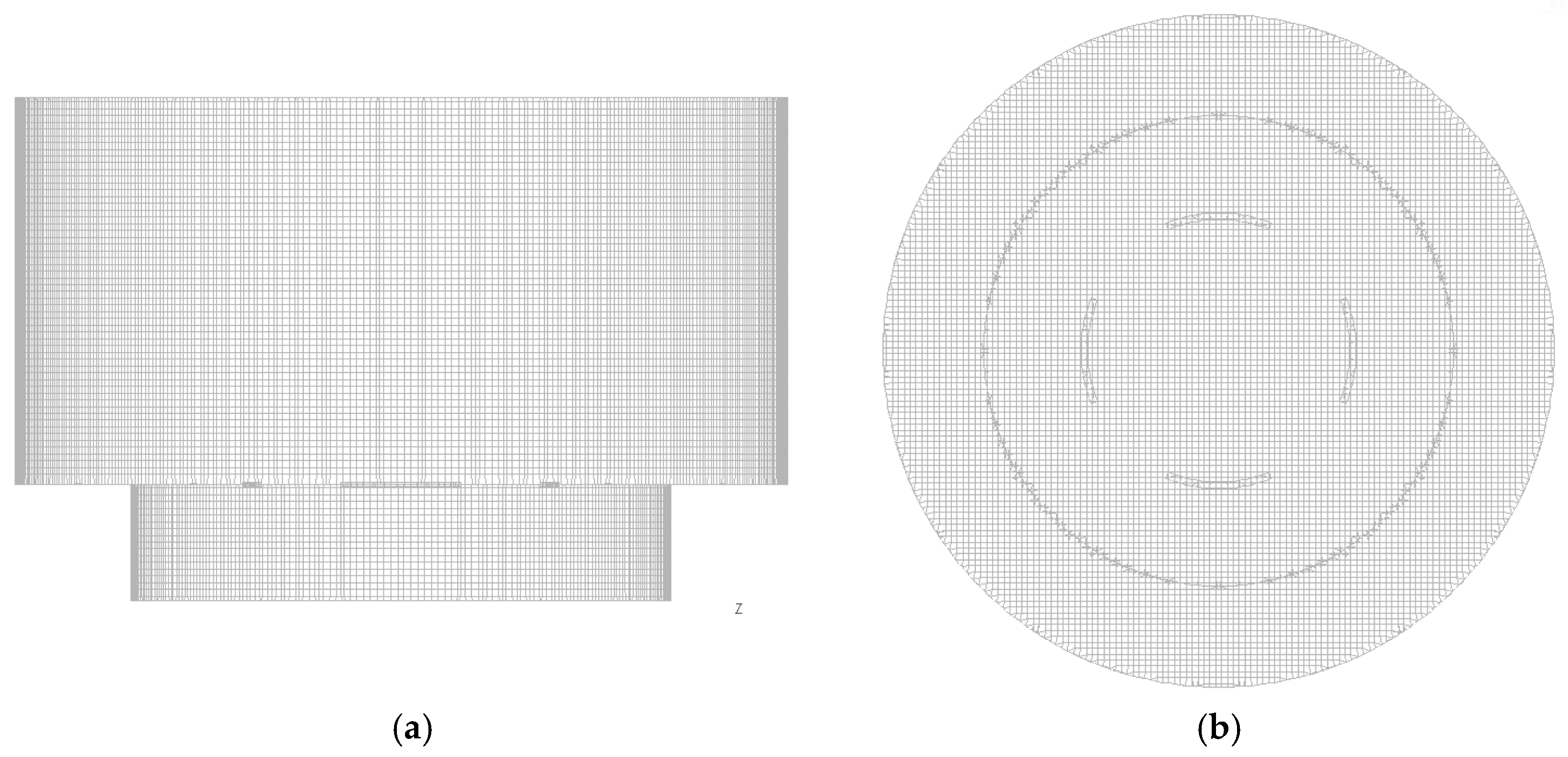
2.2. Equations and Computational Method
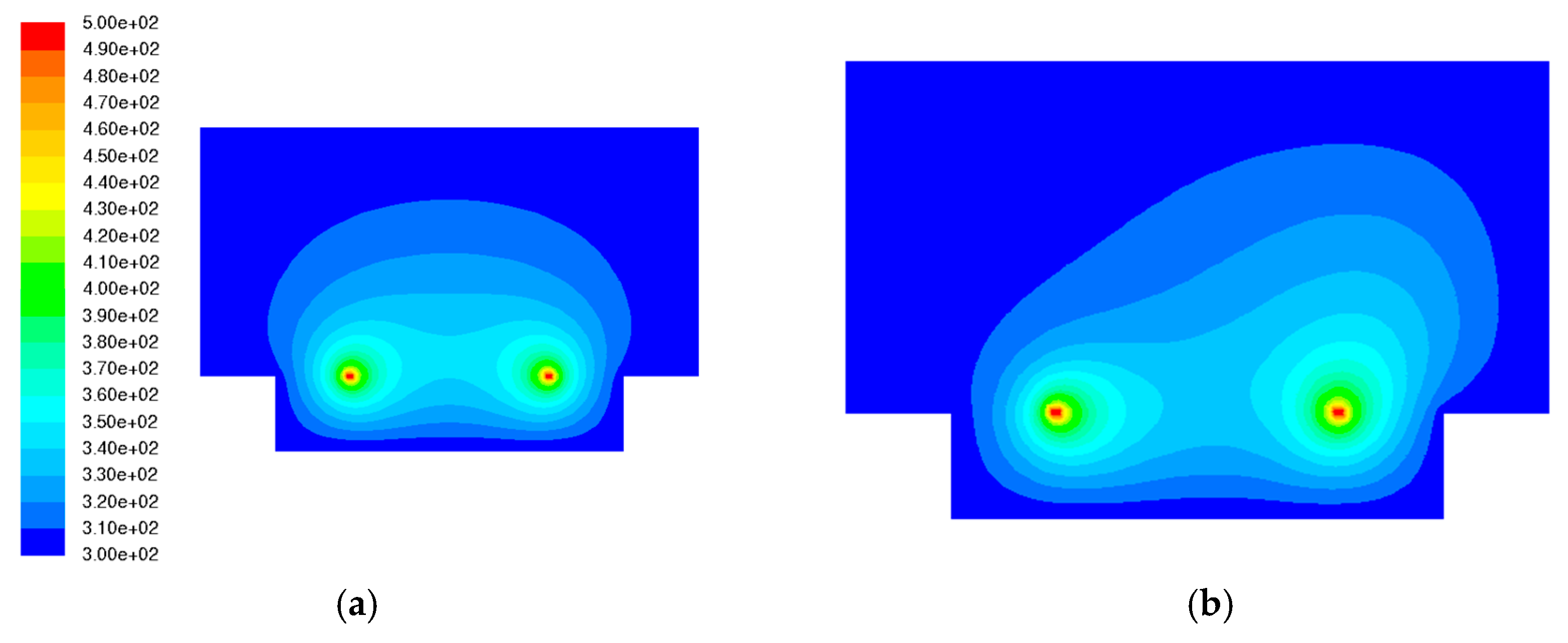
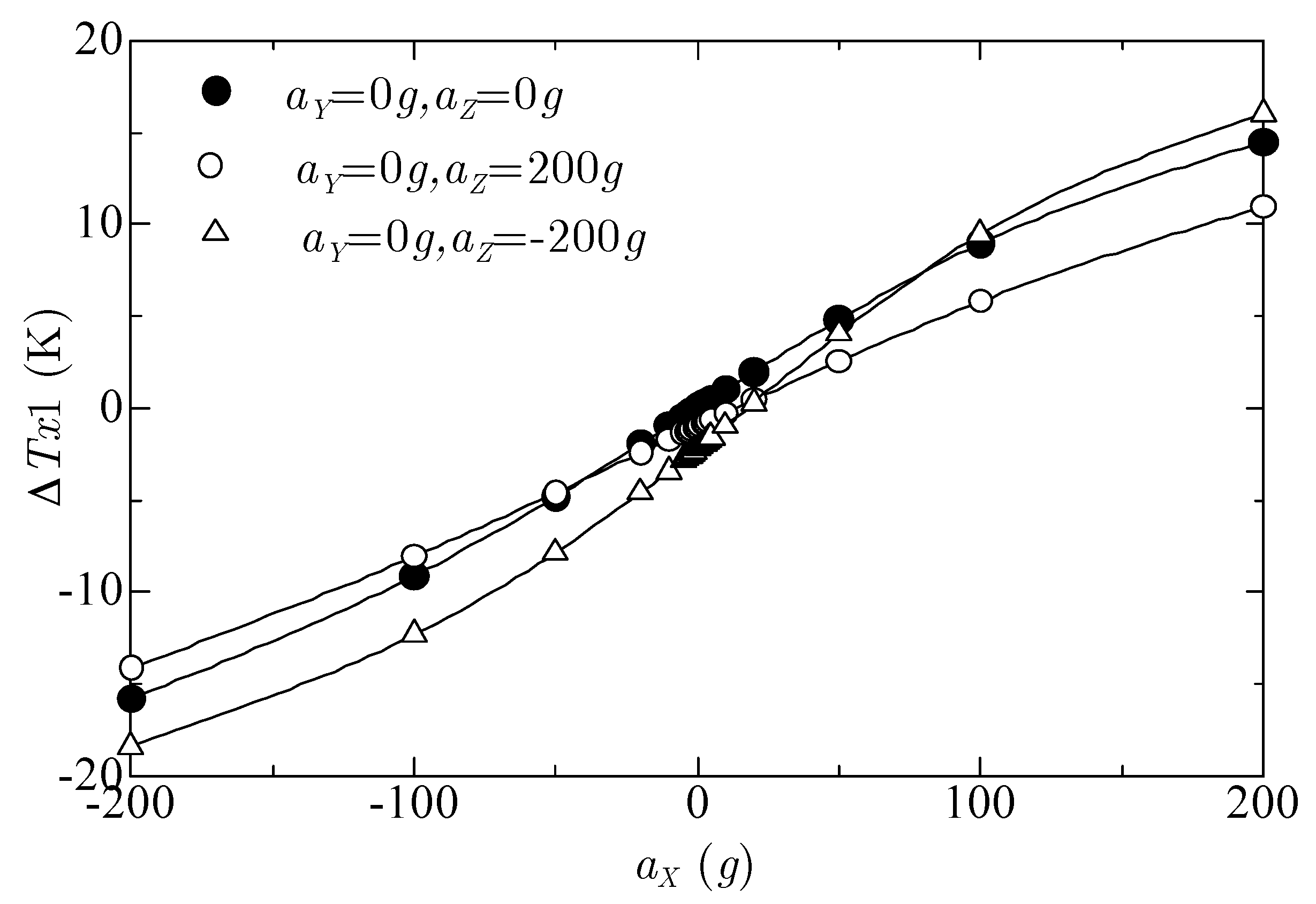
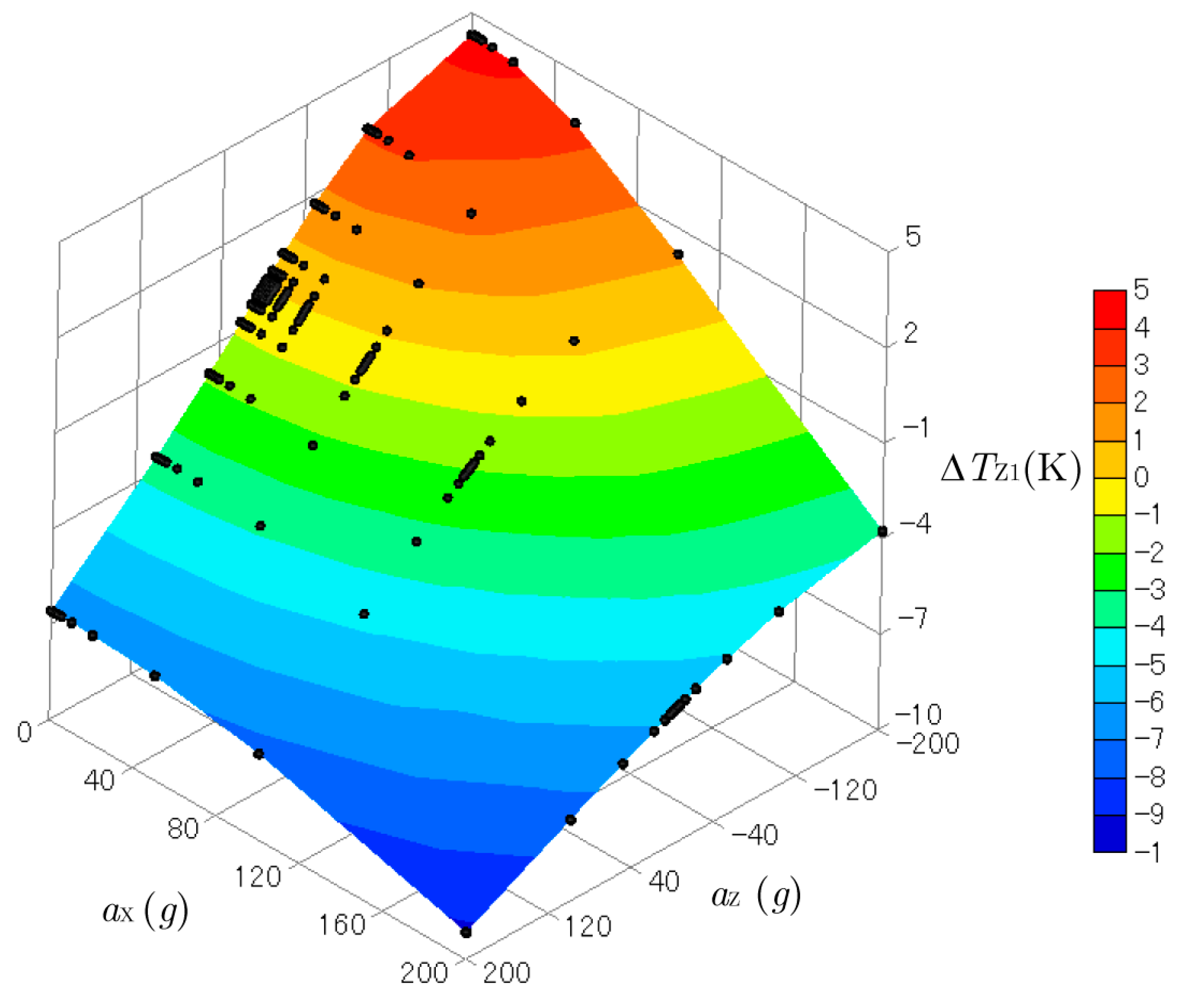
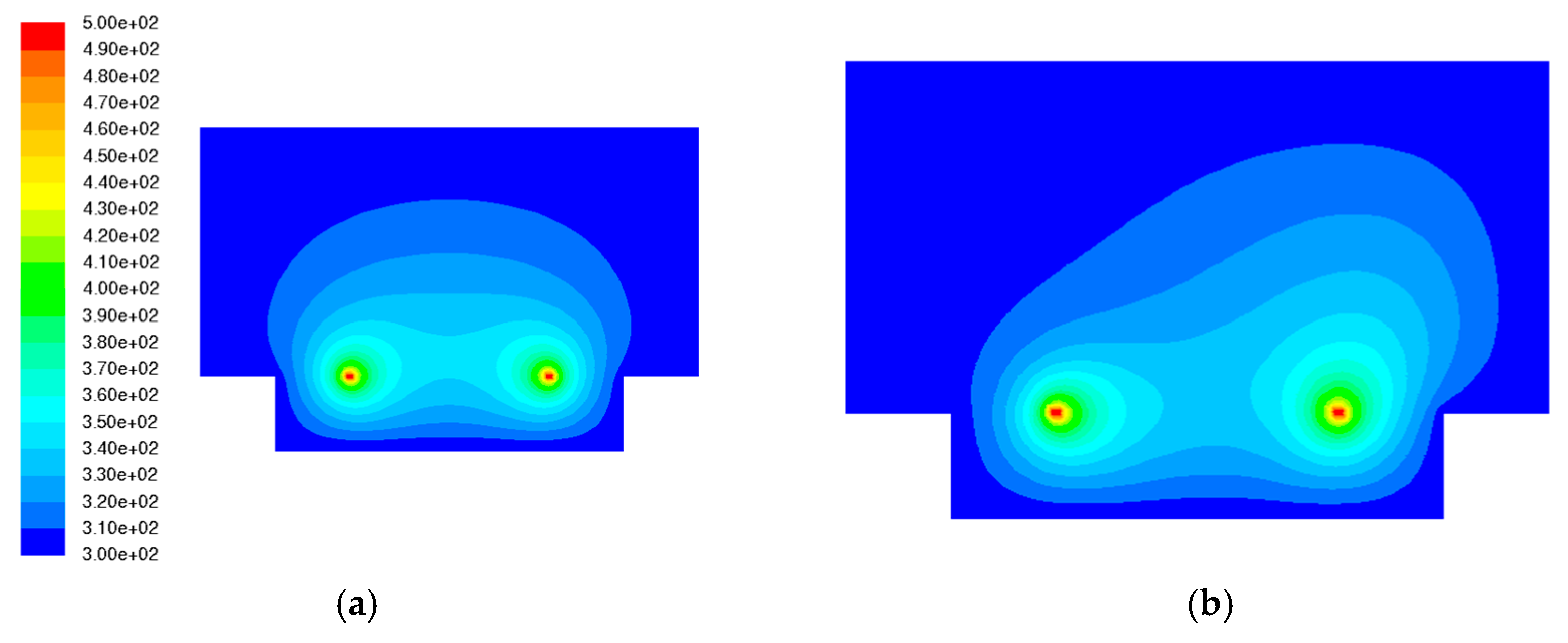
2.3. Conditions and Results
3. Frequency Response
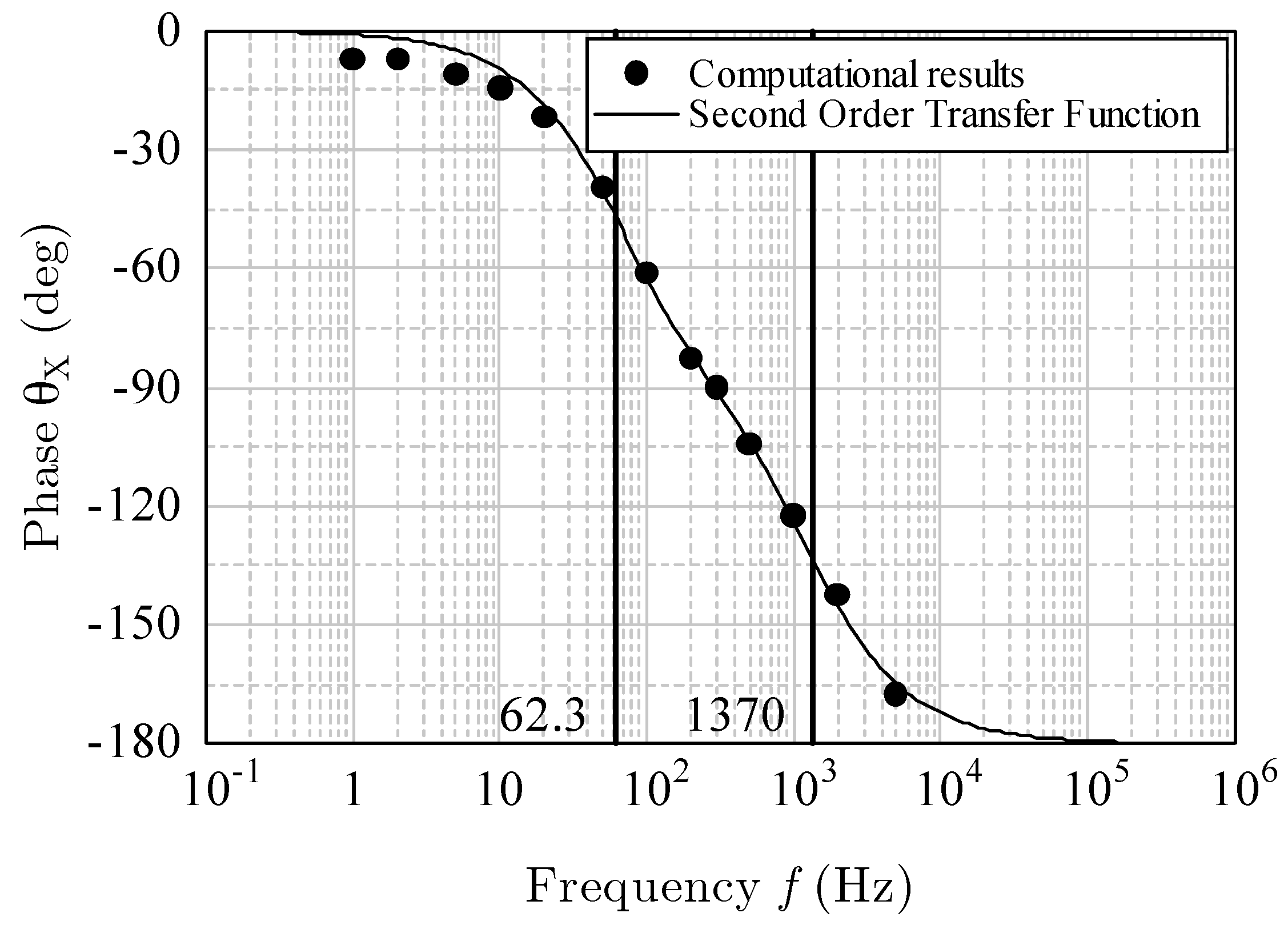
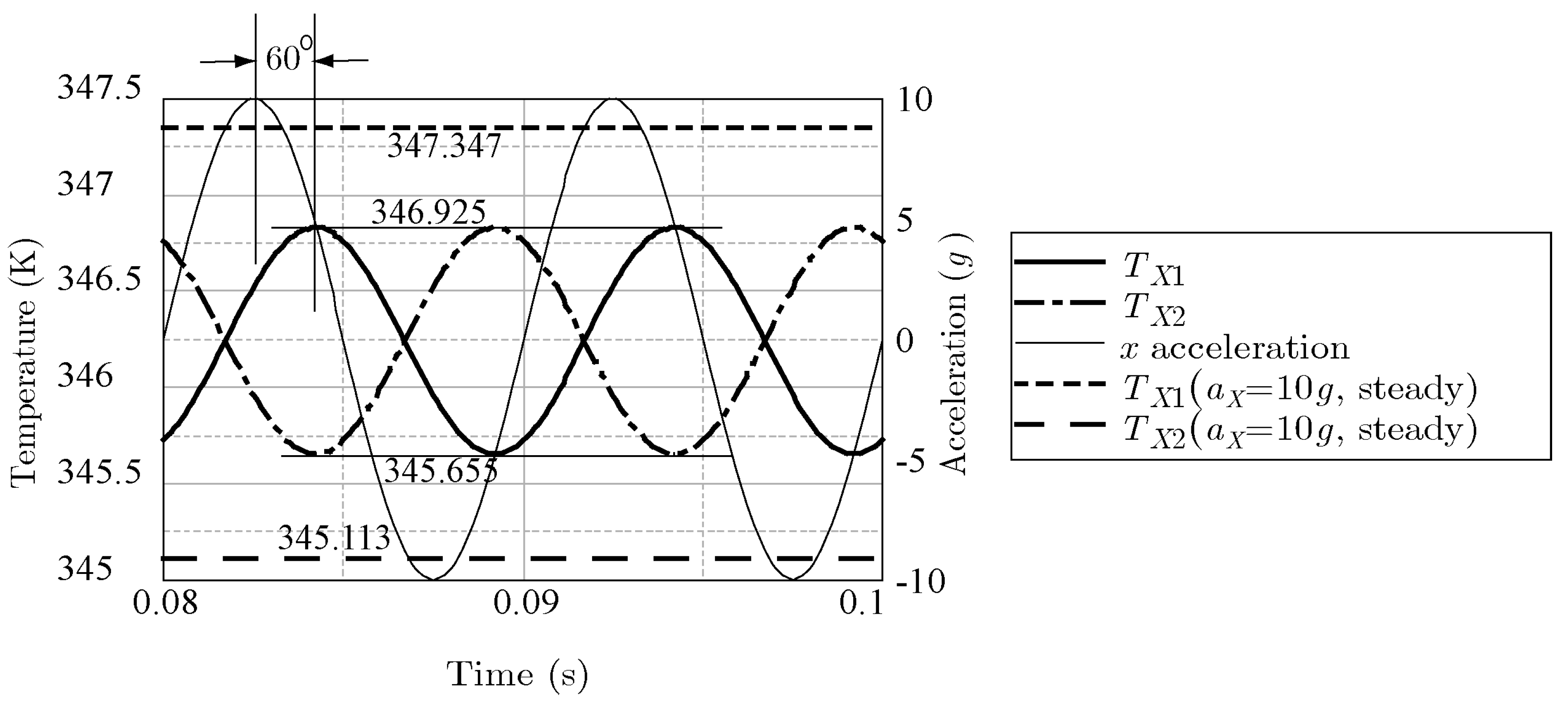
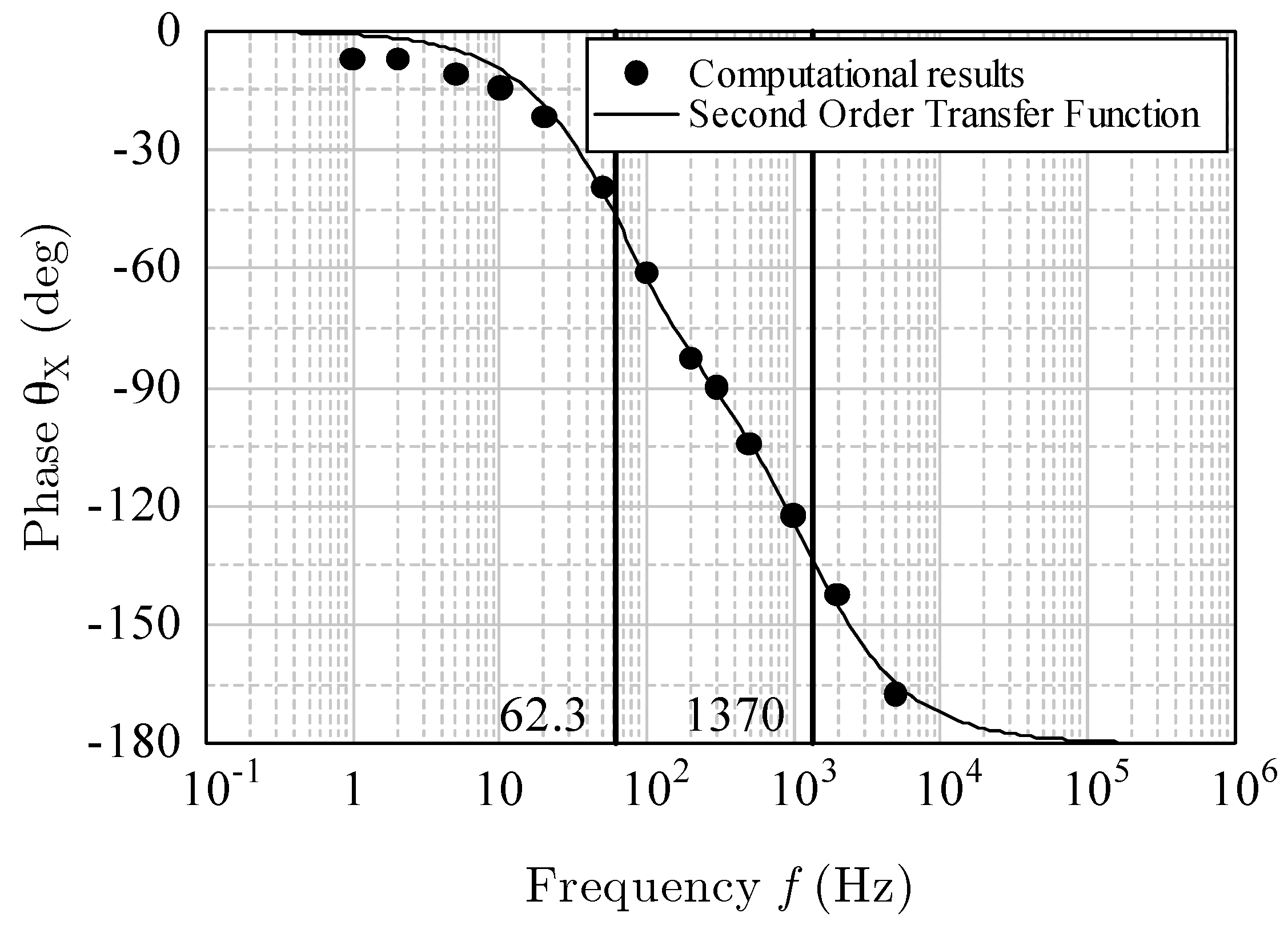
3.1. Frequency Response for Horizontal Acceleration
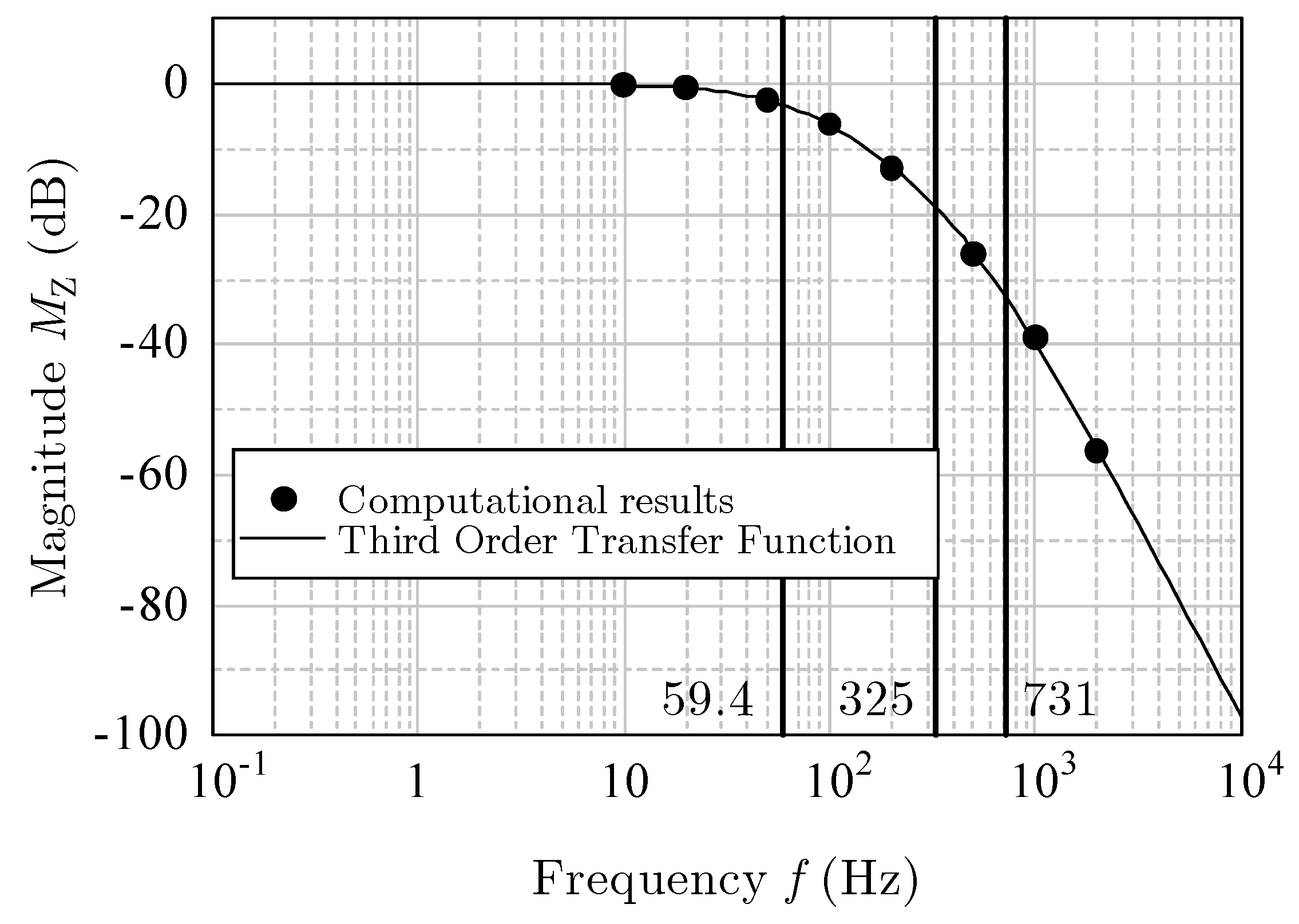
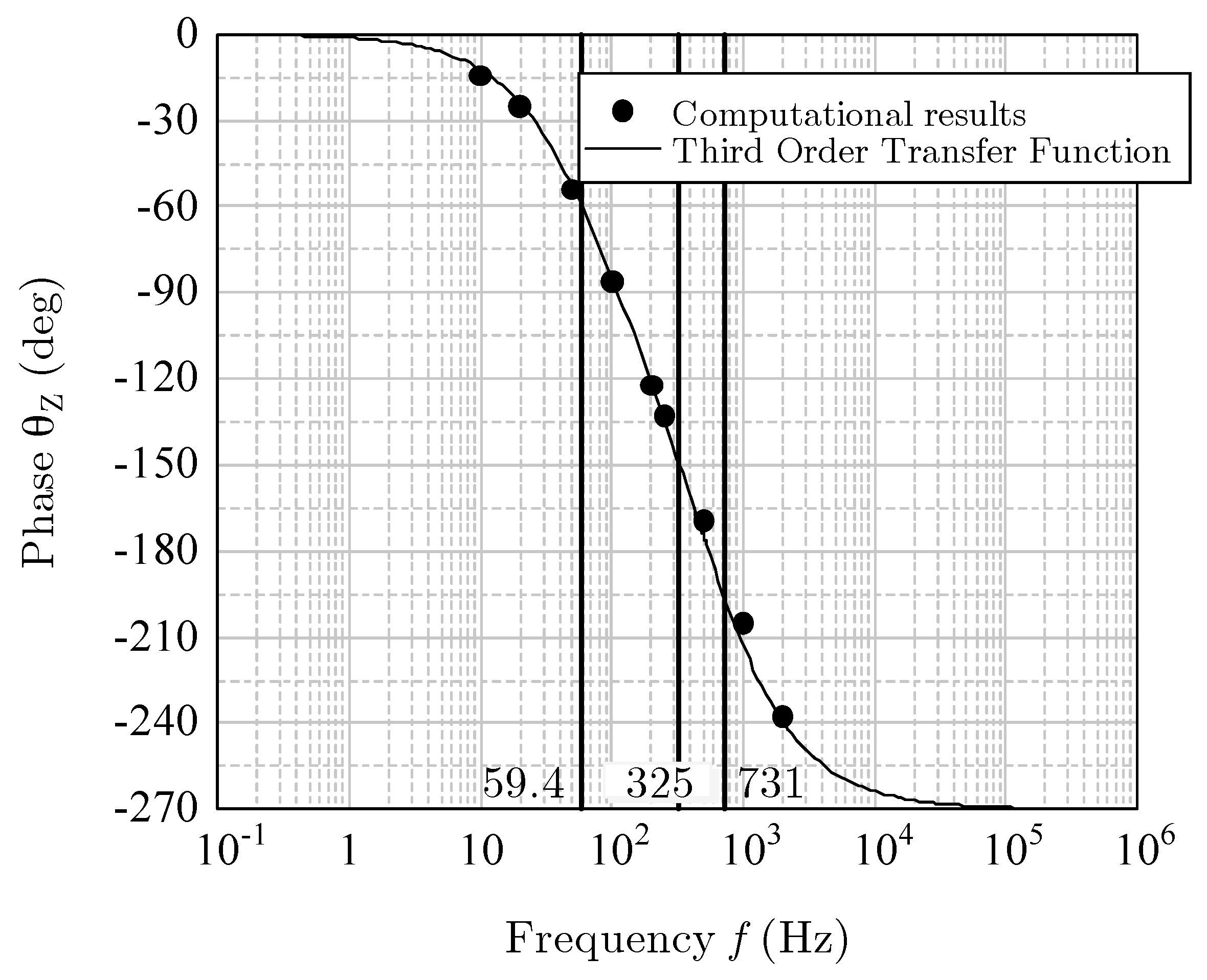
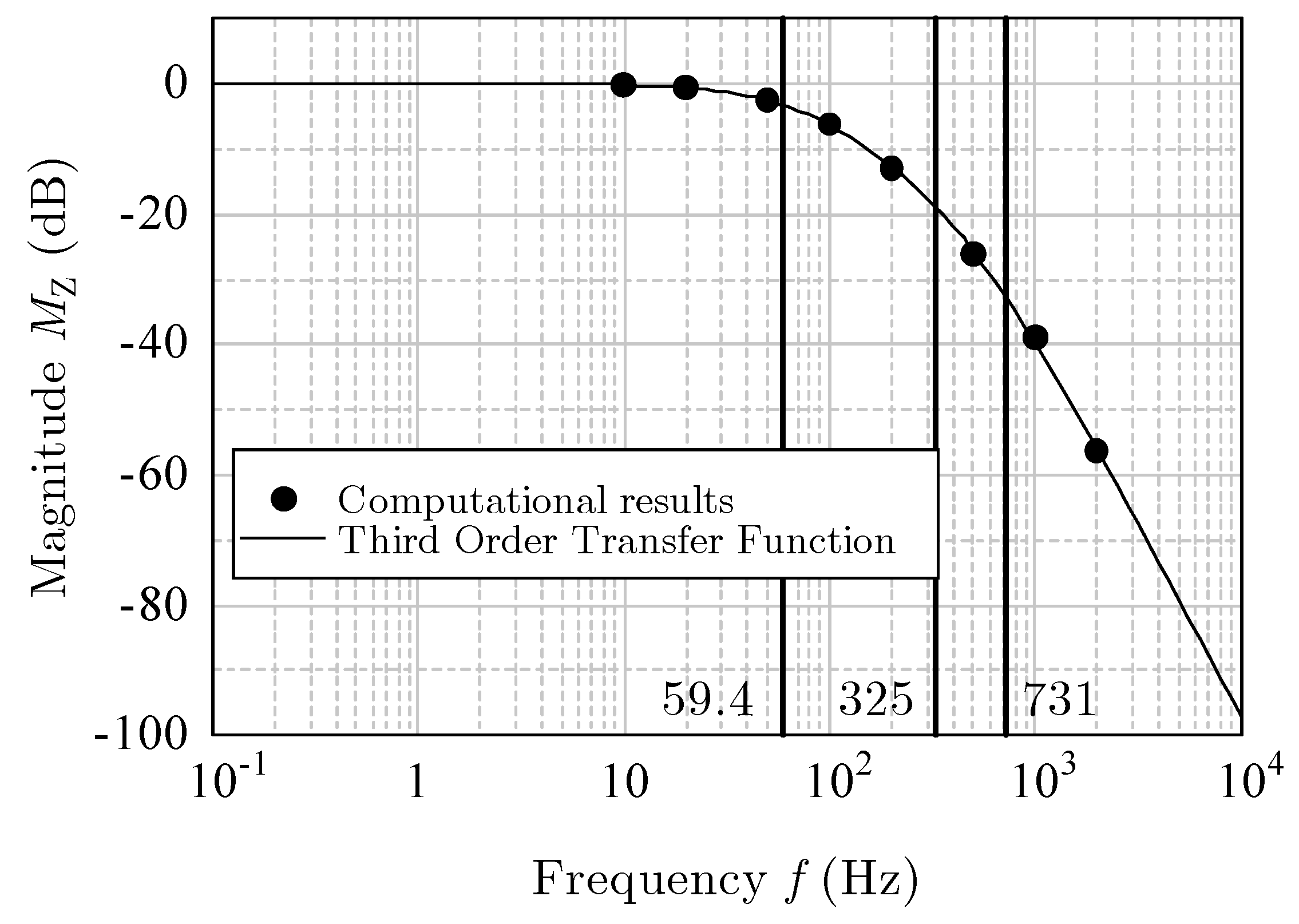
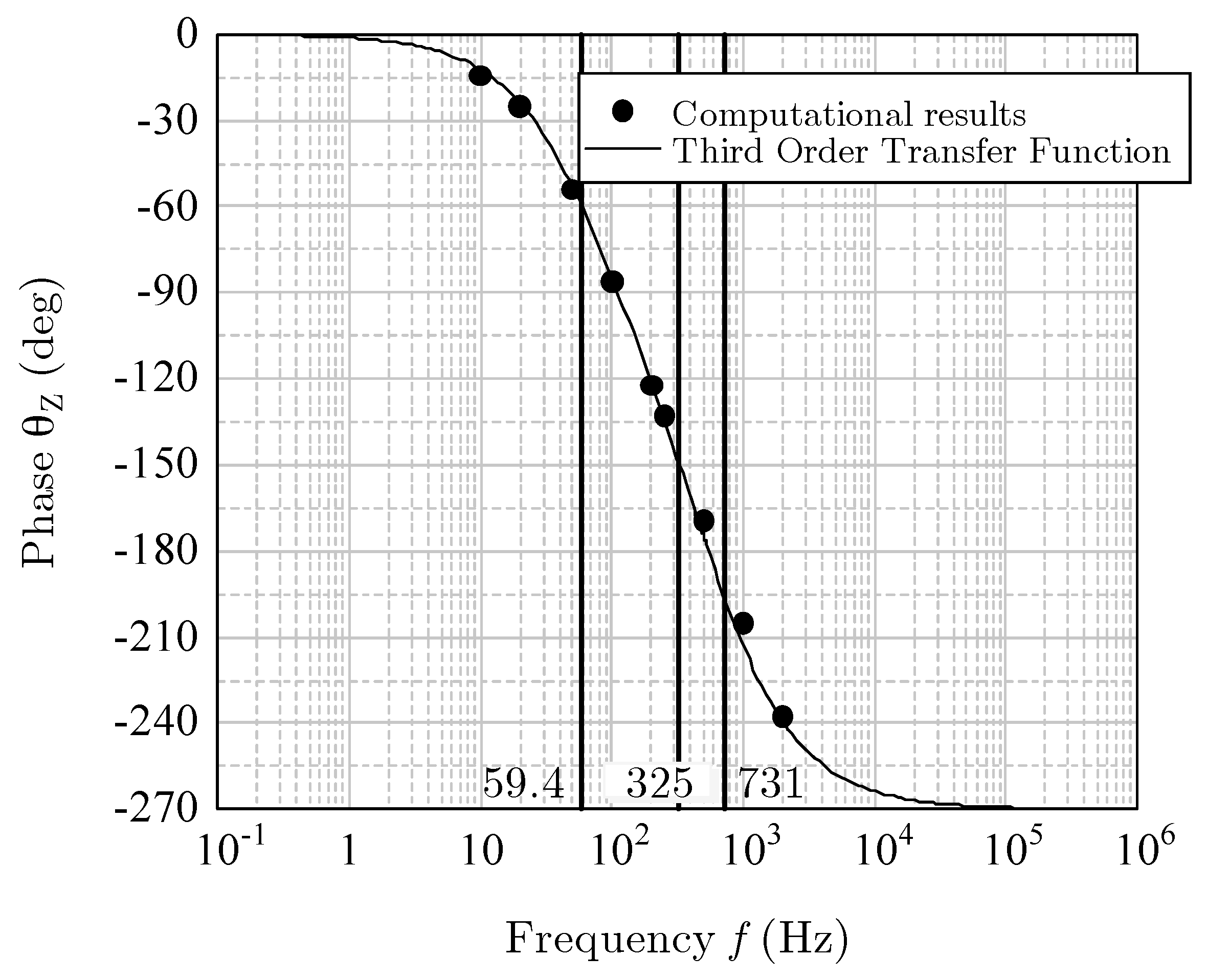
3.2. Frequency Response for Vertical Acceleration
4. Discussion and Conclusions
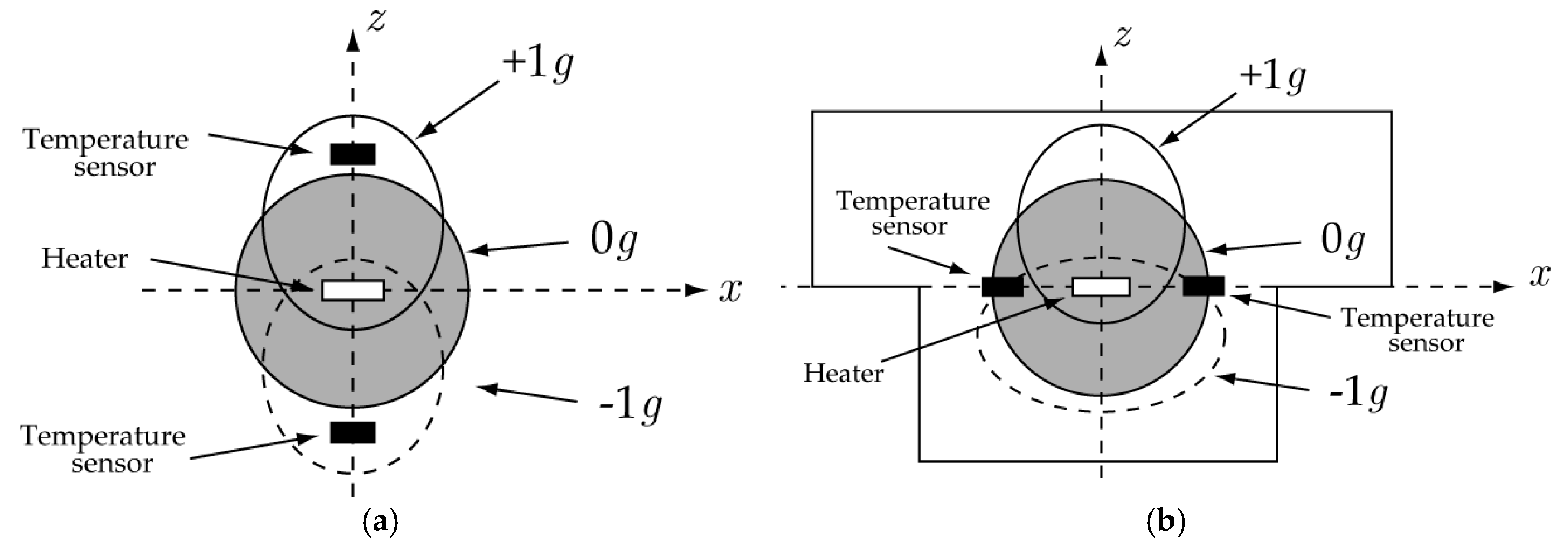
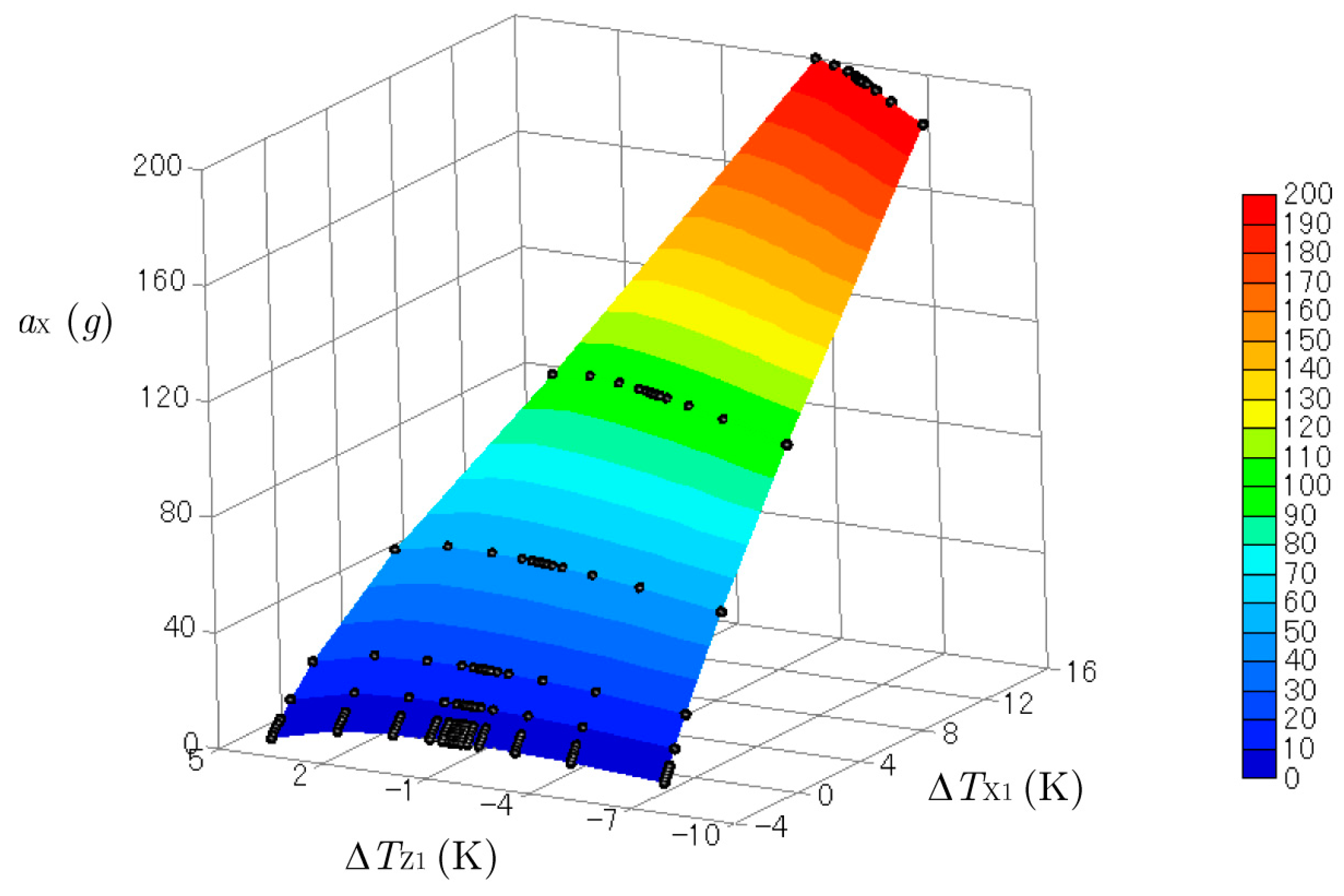
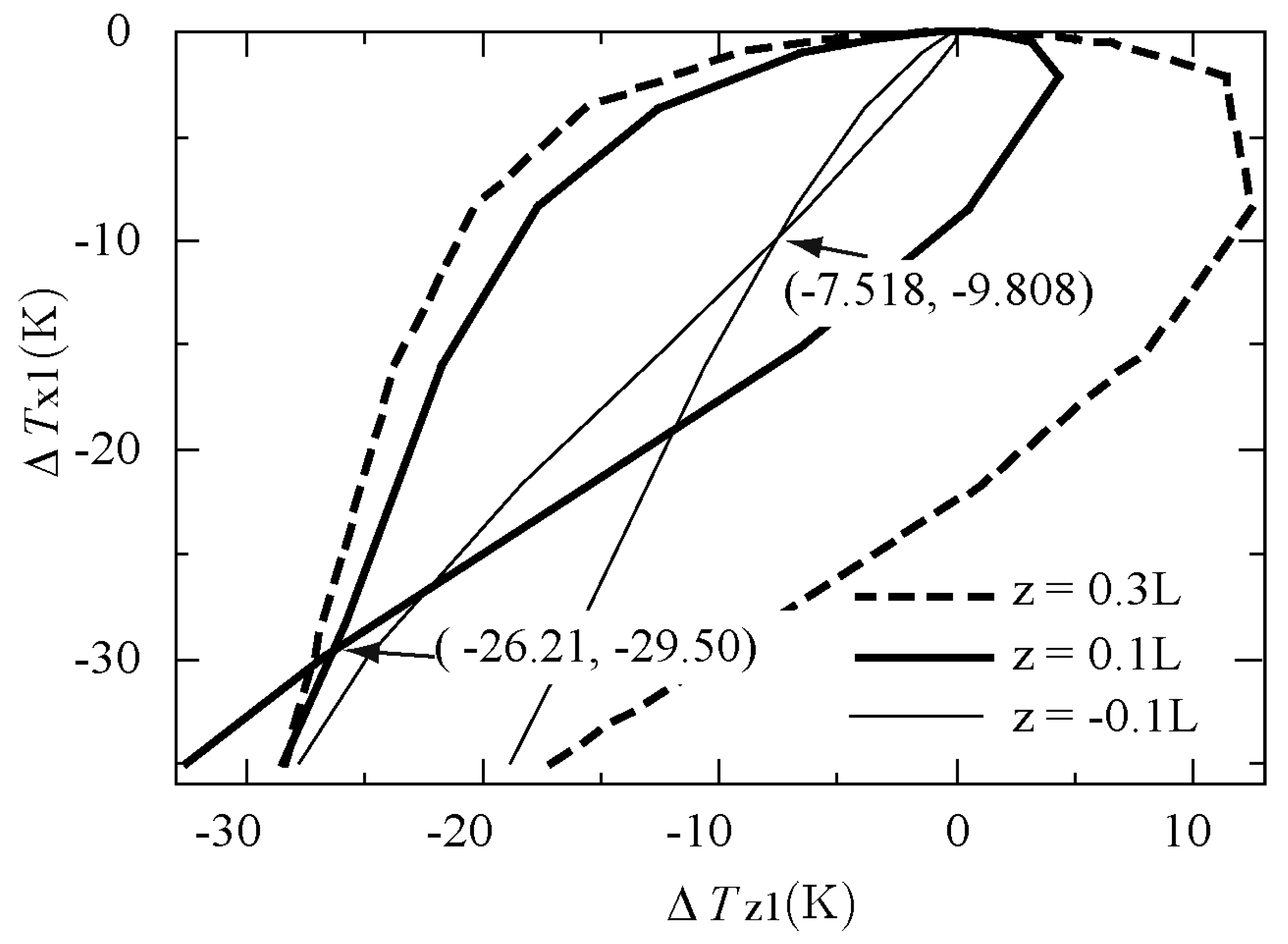
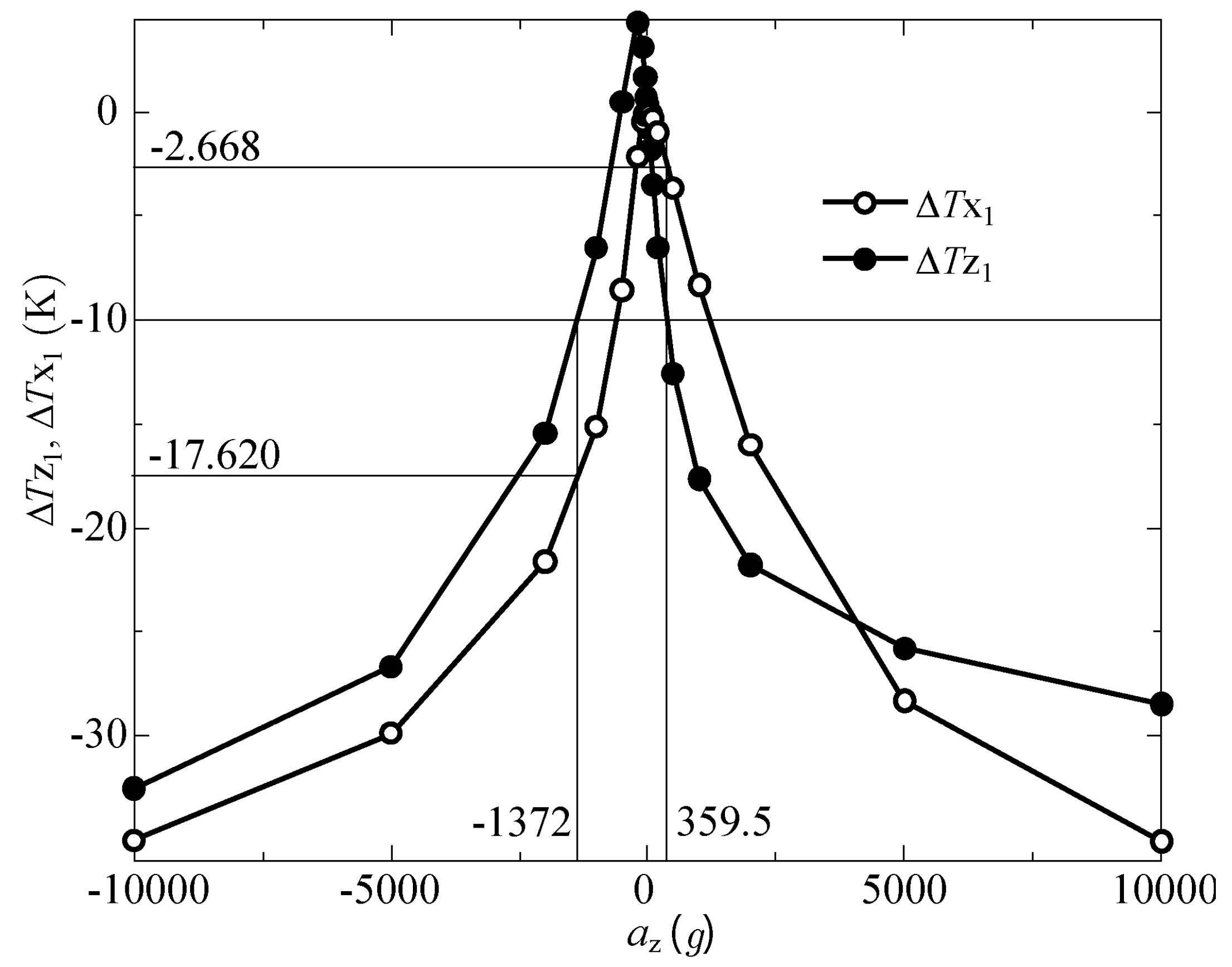
- By monitoring the temperatures at two positions and making use of cross-axis sensitivity, a unique acceleration can be determined even when the range of vertical acceleration is very large, such as −10,000–10,000 g.
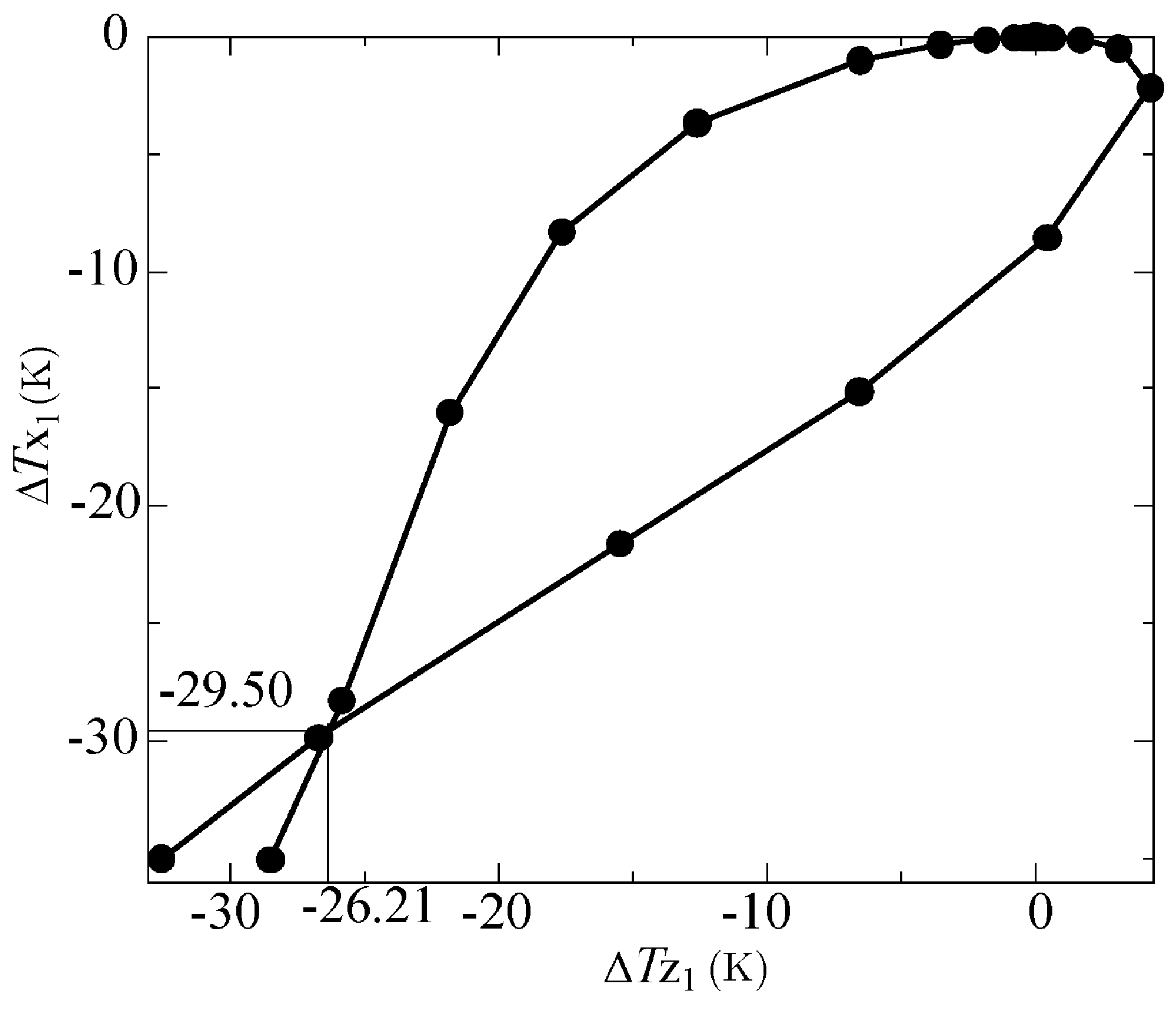
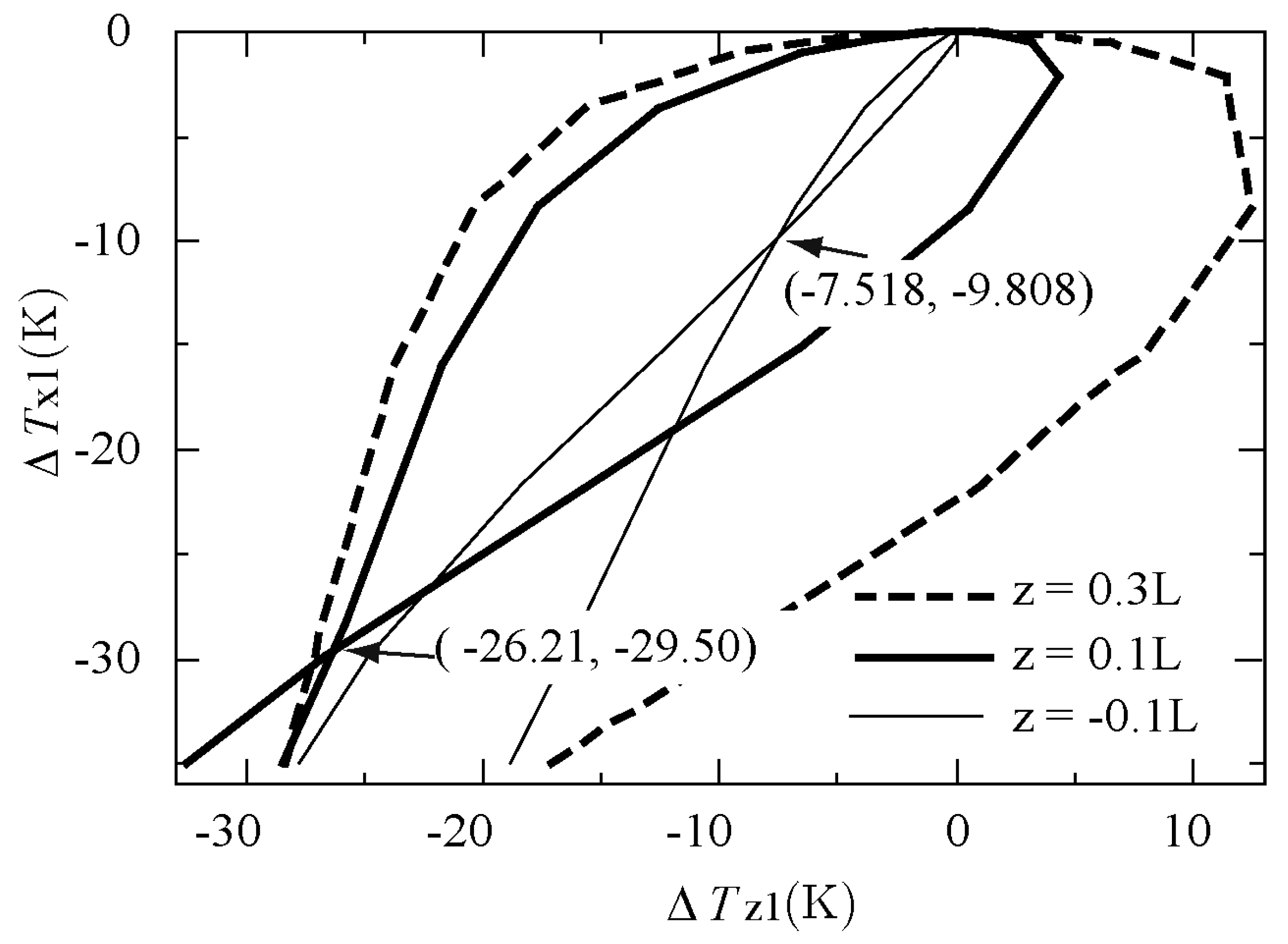
- Two (or three) responses from two (or three) temperature sensors can determine a unique set of two (or three) components of acceleration even when the acceleration range is very large, the sensor response is highly nonlinear, and cross-axis sensitivity is observed.
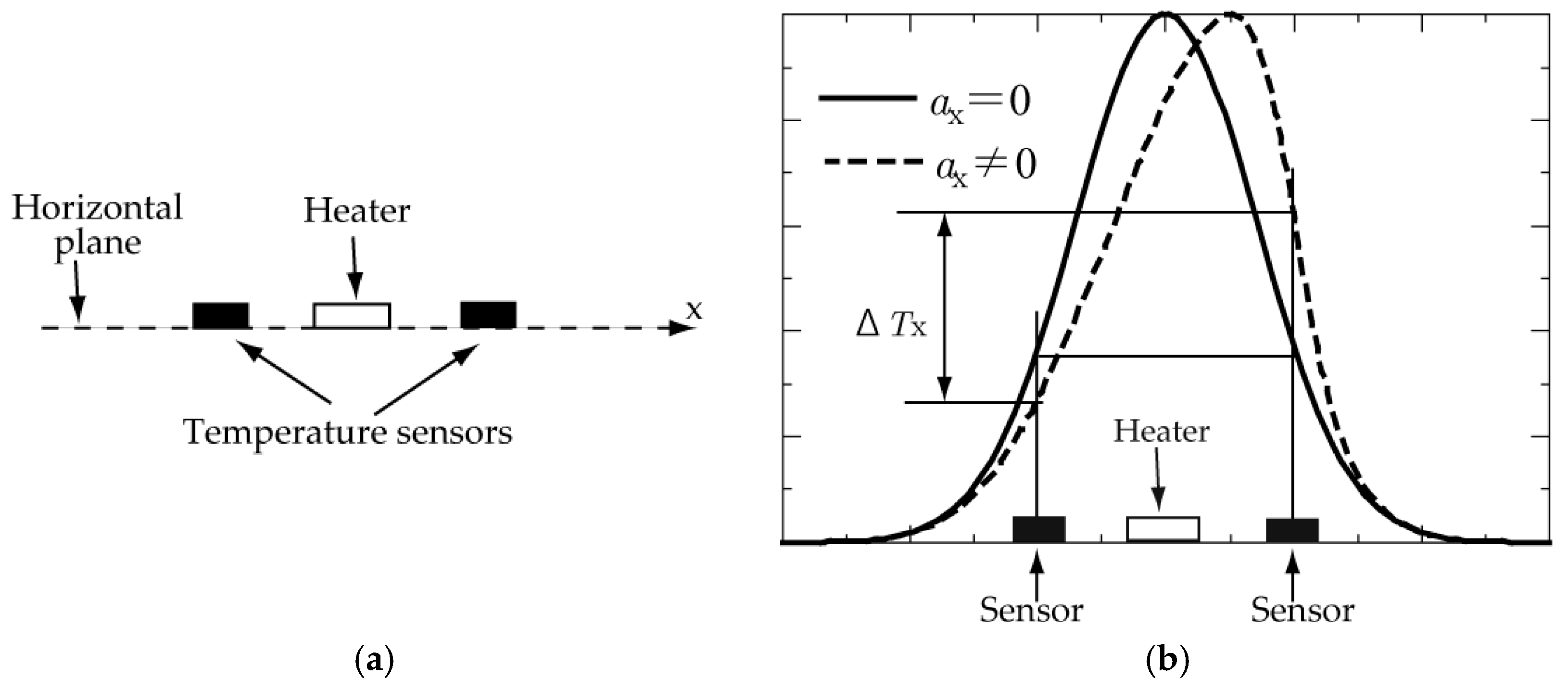
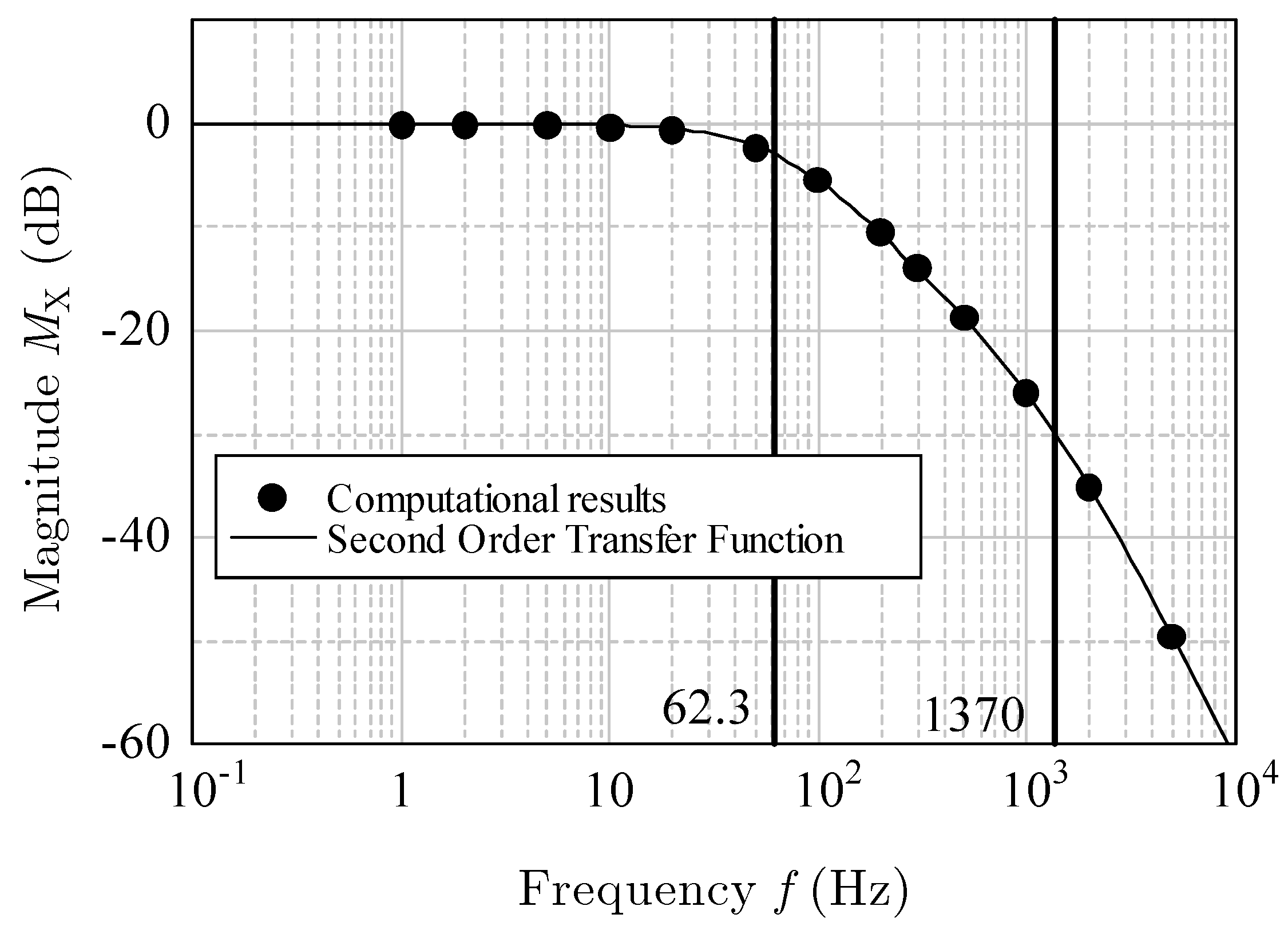
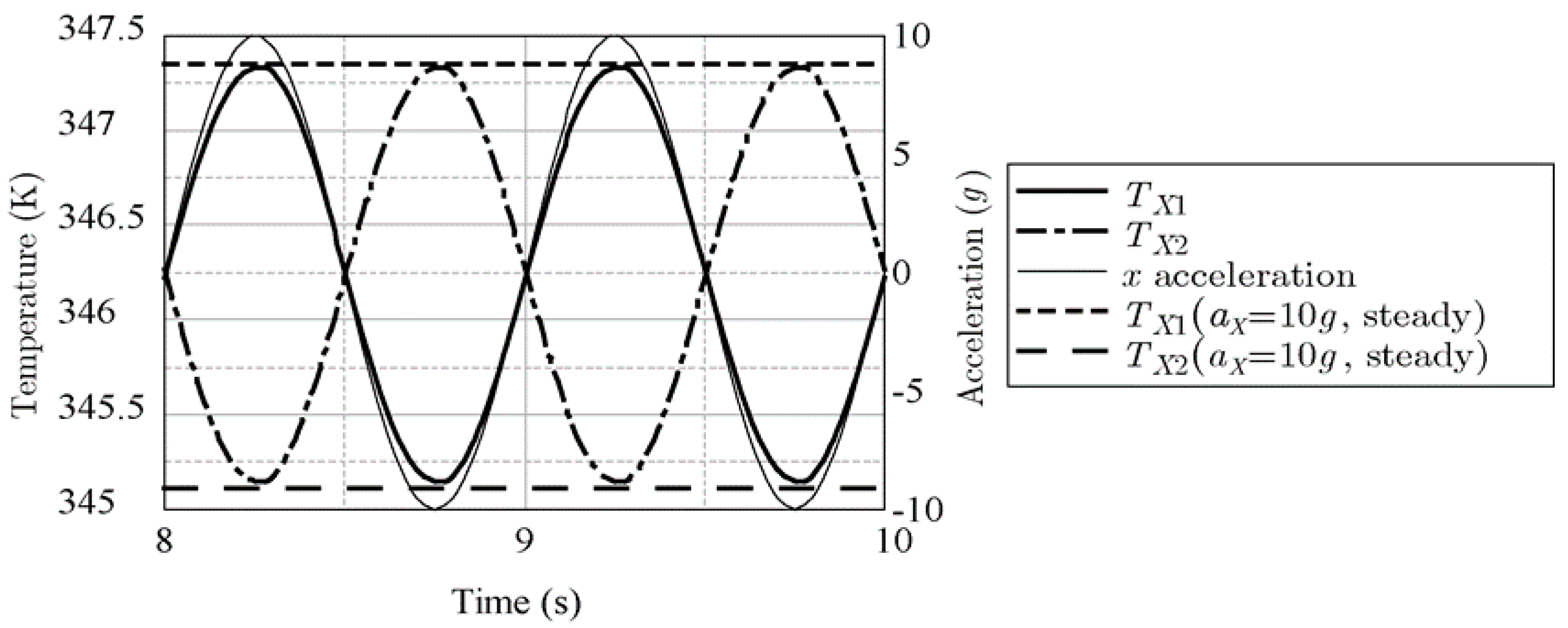
- The frequency response for horizontal acceleration is a second-order system.
- The frequency response for vertical acceleration is a third-order system.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Leung, A.M.; Jones, J.; Czyzewska, E.; Chen, J.; Woods, B. Micromachined accelerometer based on convection heat transfer. In Proceedings of the IEEE Eleventh Annual International Workshop on Micro Electro Mechanical Systems. An Investigation of Micro Structures, Sensors, Actuators, Machines and Systems (MEMS 98), Heidelberg, Germany, 25–29 January 1998. [Google Scholar] [CrossRef]
- Fennelly, J.; Ding, S.; Newton, J.; Zhao, Y. Thermal MEMS accelerometers fit many applications. Sensor Mag. 2012, 3, 18–20. [Google Scholar]
- Courteaud, J.; Crespy, N.; Combette, P.; Sorli, B.; Giani, A. Studies and optimization of the frequency response of a micromachined thermal accelerometer. Sensors Actuators A Phys. 2008, 147, 75–82. [Google Scholar] [CrossRef]
- Garraud, A.; Combette, P.; Deblonde, A.; Loisel, P.; Giani, A. Closed-loop micromachined accelerometer based on thermal convection. Micro Nano Lett. 2012, 7, 1092–1093. [Google Scholar] [CrossRef]
- Tsang, S.H.; Ma, A.H.; Karim, K.S.; Parameswaran, A.; Leung, A.M. Monolithically fabricated polymermems 3-axis thermal accelerometers designed for automated wirebonder assembly. In Proceedings of the IEEE 21st International Conference on Micro Electro Mechanical Systems (MEMS 2008), Wuhan, China, 13–17 January 2008. [Google Scholar]
- Rocha, L.A.; Silva, C.S.; Pontes, A.J.; Viana, J.C. Design of a 3-axis thermal accelerometer using an electro-thermo-fluidic model. In Proceedings of the 13th International Conference on Thermal, Mechanical and Multi-Physics Simulation and Experiments in Microelectronics and Microsystems (EuroSimE 2012), Lisbon, Portugal, 16–18 April 2012. [Google Scholar]
- Thien, X.D.; Ogami, Y. A three-axis thermal accelerometer. In Proceedings of the ASME 2011 International Mechanical Engineering Congress & Exposition (IMECE 2011), Denver, CO, USA, 11–17 November 2011. [Google Scholar]
- Murakita, N.; Asano, T.; Ogami, Y.; Fukudome, K. Characteristic Analysis of Thermal Triple-Axis Accelerometer. 2017. Available online: https://www.jstage.jst.go.jp/article/jsmekansai/2017.92/0/2017.92_M704/_article (accessed on 10 October 2017). (In Japanese).
- Jiang, L.; Cai, Y.; Liu, H.; Zhao, Y. A micromachined monolithic 3 axis accelerometer based on convection heat transfer. In Proceedings of the 8th IEEE International Conference on Nano/Micro Engineered and Molecular Systems (NEMS 2013), Suzhou, China, 7–10 April 2013; pp. 248–251. [Google Scholar]
- Nguyen, H.B.; Mailly, F.; Latorre, L.; Nouet, P. A new monolithic 3-axis thermal convective accelerometer: Principle, design, fabrication and characterization. Microsyst. Technol. 2015, 21, 1867–1877. [Google Scholar] [CrossRef]
- Silva, C.S.; Noh, J.; Pontes, A.J.; Gasparb, J.; Rocha, L.A. The use of polymeric technologies for functional 3D microdevices. Procedia Eng. 2014, 87, 895–898. [Google Scholar] [CrossRef]
- Boyed, S. Lecture 10 Sinusoidal Steady-State and Frequency Response, 10-1–10-34. Available online: https://web.stanford.edu/–boyd/ee102/freq.pdf (accessed on 10 October 2017).



© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ogami, Y.; Murakita, N.; Fukudome, K. Computational Experiments on the Step and Frequency Responses of a Three-Axis Thermal Accelerometer. Sensors 2017, 17, 2618. https://doi.org/10.3390/s17112618
Ogami Y, Murakita N, Fukudome K. Computational Experiments on the Step and Frequency Responses of a Three-Axis Thermal Accelerometer. Sensors. 2017; 17(11):2618. https://doi.org/10.3390/s17112618
Chicago/Turabian StyleOgami, Yoshifumi, Naoya Murakita, and Koji Fukudome. 2017. "Computational Experiments on the Step and Frequency Responses of a Three-Axis Thermal Accelerometer" Sensors 17, no. 11: 2618. https://doi.org/10.3390/s17112618
APA StyleOgami, Y., Murakita, N., & Fukudome, K. (2017). Computational Experiments on the Step and Frequency Responses of a Three-Axis Thermal Accelerometer. Sensors, 17(11), 2618. https://doi.org/10.3390/s17112618