An Ontology-Based Reasoning Framework for Querying Satellite Images for Disaster Monitoring



Abstract
1. Introduction
- We propose a principled approach to semantically enrich annotations in a map by geometrically aligning classification output from a CNN to publicly available geo-data.
- Instead of building our own ontology from scratch, we show how to reuse publicly available geo-related ontologies in order to represent geometry, spatial relations and affordances of entities. This extension is called OntoCity.
- We demonstrate the framework, SemCityMap, for path finding tasks in a flood scenario where high-level semantics are integrated into the path finding algorithm per se.
- We evaluate query performance under different conditions formulated in the queries. These conditions involve spatial relations, connectivity, and the classification of the entity in the map (buildings, roads, schools, etc.).
1.1. Ontology-Based Reasoning
1.2. Related Works
2. Modeling in Ontologies
- The expression “name1:name2” refers to the entity name2, which belongs to the ontology name1.
- The subsumption relation shown as “” means concept A is a subset (a specialization) of concept B.
- The full existential quantification shown as “” indicates all the concepts whose instances have at least one relation with concept C via property R.
- The number restriction shown as “= n R”, where n is a numerical value, indicates an ontological concept whose instances are related to other concepts/values n-times via the property R.
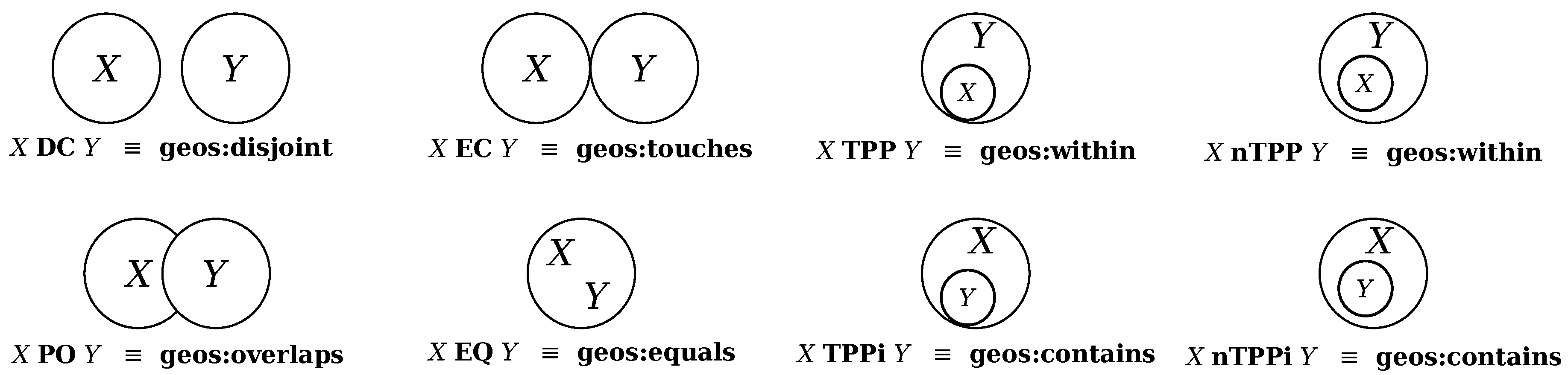
2.1. GeoSPARQL
2.2. DUL Ontology
2.3. OntoCity
2.3.1. Refactoring of Spatial Relations
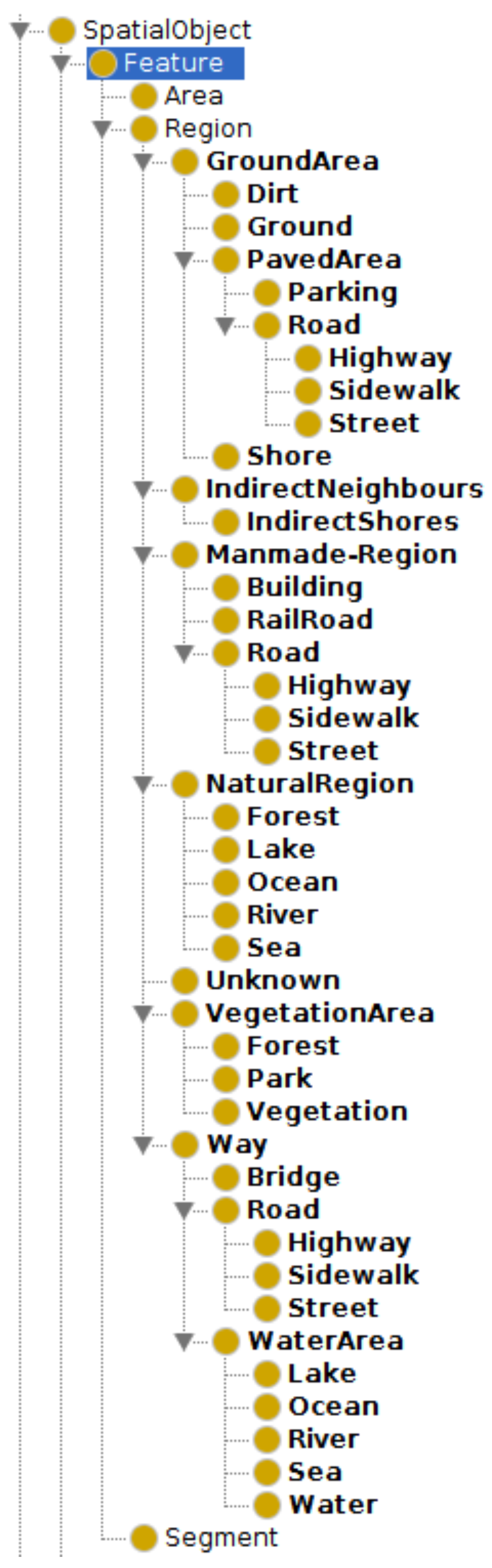
2.3.2. Taxonomy of geos:Feature
2.4. Path Connectivity in OntoCity
3. Populating OntoCity for a Particular Disaster
3.1. Data Acquisition
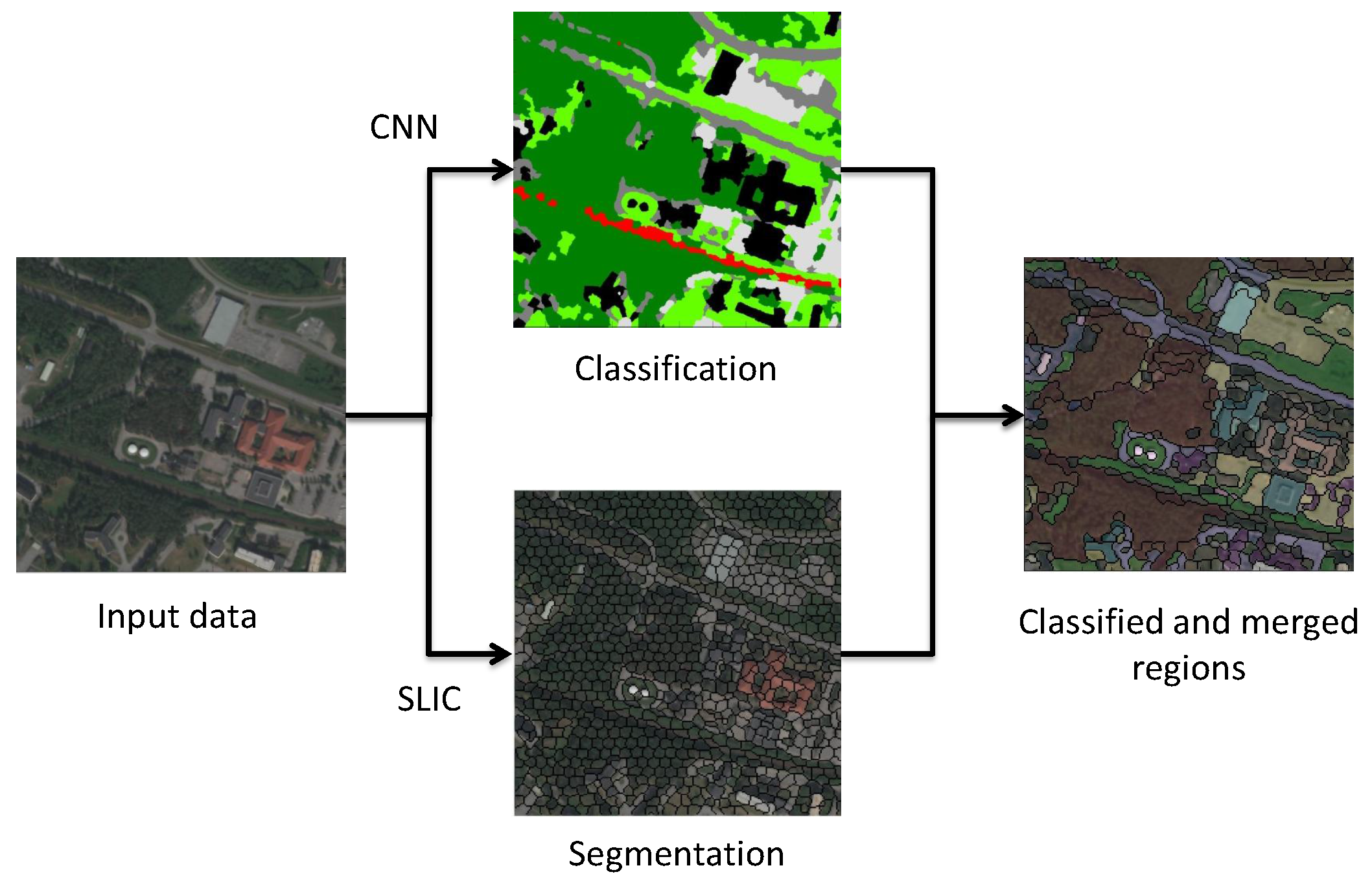
3.2. Classification and Segmentation
3.3. Population of OntoCity
3.3.1. Region Instantiation
3.3.2. Event Instantiation
4. Reasoning
4.1. Region Retrieval
4.2. Path Finding
5. System Description
5.1. Advanced GUI
6. Results and Evaluation
6.1. Scenario
6.2. Results
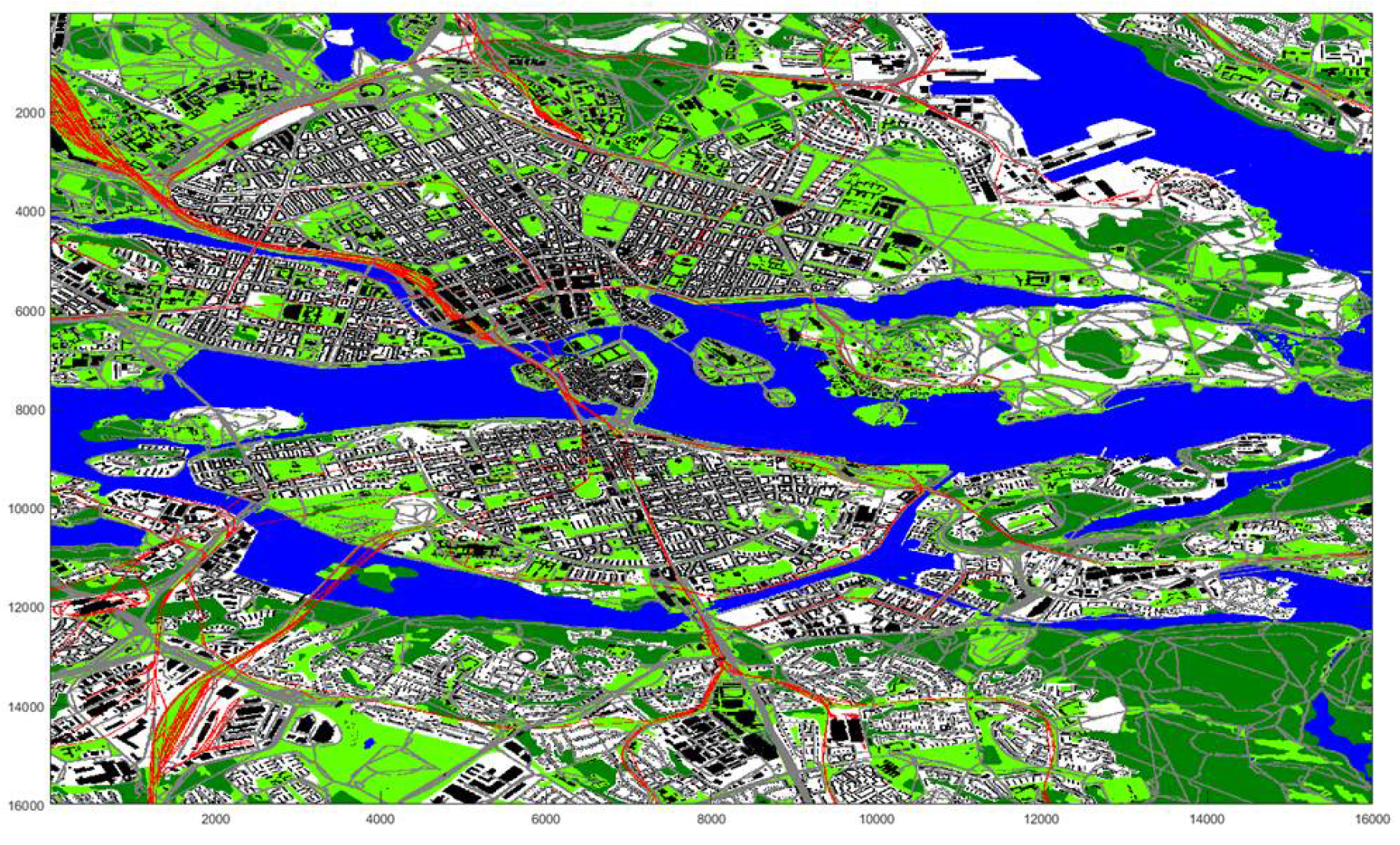
6.2.1. Classification
6.2.2. Population of OntoCity with Stockholm Satellite Data
6.2.3. Query Time
- Segmentation: this factor allows us to first retrieve the relevant instances of the ontocity:Segment class (see Figure 7) to excludes all the regions belonging to all the non-relevant segments.
- Region Types Separation: since in the queries we usually consider types of regions (e.g., water area, ground area, etc.) it can be helpful if we keep a separate list of regions for each segment (instead of a long list of regions regardless of their type), and only consider (or ignore) the regions with specific types mentioned in the queries.
- Flood Area Exclusion: it obviously helps to first exclude the regions involved in the flood and then continue the geometrical/spatial calculations between regions.
7. Conclusions
8. Discussion and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Climate Researchers Warn of Stockholm Floods. 2004. Available online: https://www.thelocal.se/20041204/706 (accessed on 4 December 2004).
- Siricharoen, W.V.; Pakdeetrakulwong, U. A survey on ontology-driven geographic information systems. In Proceedings of the Fourth International Conference on Digital Information and Communication Technology and its Applicationsm DICTAP, Bangkok, Thailand, 6–8 May 2014; pp. 180–185. [Google Scholar]
- Bekke, J. Semantic Data Modeling; Prentice Hall: Upper Saddle River, NJ, USA, 1992. [Google Scholar]
- Alirezaie, M. Bridging the Semantic Gap between Sensor Data and Ontological Knowledge. Ph.D. Thesis, School of Science and Technology, Örebro University, Örebro, Sweden, 2015. [Google Scholar]
- Gangemi, V.P.A. Ontology Design Patterns. In Handbook of Ontologies, 2nd ed.; Staab, R.S.S., Ed.; Springer: New York, NY, USA, 2009. [Google Scholar]
- Bittner, T.M.; Donnelly, S.W. Ontology and semantic interoperability. In Large-Scale 3D Data Integration: Challenges and Opportunities; CRC Press: London, UK, 2005; pp. 139–160. [Google Scholar]
- Gu, H.; Li, H.; Yan, L.; Liu, Z.; Blaschke, T.; Soergel, U. An Object-Based Semantic Classification Method for High Resolution Remote Sensing Imagery Using Ontology. Remote Sens. 2017, 9, 329. [Google Scholar] [CrossRef]
- Almendros-Jimenez, J.M.; Domene, L.; Piedra-Fernandez, J.A. A Framework for Ocean Satellite Image Classification Based on Ontologies. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1048–1063. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, L.; Lin, X.; Liu, Y. A Qualitative Representation and Similarity Measurement Method in Geographic Information Retrieval. CoRR 2013, abs/1311.4644. [Google Scholar]
- Wang, W.; Dong, C.; Yang, P. Ontology modeling of emergency plan systems. In Proceedings of the 6th International Conference on Fuzzy Systems and Knowledge Discovery (FSKD), Tianjin, China, 14–16 August 2009; Volume 2, pp. 290–294. [Google Scholar]
- Huang, W.D.; Ding, B.L.; Yan, L. The Design of Dynamic Response System Based on Digital Emergency Plan. In Advanced Materials Research; Trans Tech Publications: Zürich, Switzerland, 2013; Volume 605, pp. 1855–1860. [Google Scholar]
- Kalabokidis, K.; Athanasis, N.; Vaitis, M. OntoFire: An ontology-based geo-portal for wildfires. Nat. Hazards Earth Syst. Sci. 2011, 11, 3157–3170. [Google Scholar] [CrossRef]
- Agresta, A.; Fattoruso, G.; Pollino, M.; Pasanisi, F.; Tebano, C.; Vito, S.D.; Francia, G.D. An Ontology Framework for Flooding Forecasting. In Lecture Notes in Computer Science; Murgante, B., Misra, S., Rocha, A.M.A.C., Torre, C.M., Rocha, J.G., Falcão, M.I., Taniar, D., Apduhan, B.O., Gervasi, O., Eds.; Springer: New York, NY, USA, 2014; Volume 8582, pp. 417–428. [Google Scholar]
- Mostafavi, M.A.; Bakillah, M. Real Time Semantic Interoperability in Adhoc Networks of GeoSpatial Data Sources: Challenges, Achievements and Prespectives. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 1–2, 91–100. [Google Scholar]
- Battle, R.; Kolas, D. Enabling the Geospatial Semantic Web with Parliament and GeoSPARQL. Semant. Web 2012, 3, 355–370. [Google Scholar]
- Baader, F.; Nutt, W. Chapter Basic Description Logics. In The Description Logic Handbook; Cambridge University Press: Cambridge, UK, 2003; pp. 43–95. [Google Scholar]
- Cohn, A.G.; Bennett, B.; Gooday, J.; Gotts, N.M. Qualitative Spatial Representation and Reasoning with the Region Connection Calculus. GeoInformatica 1997, 1, 275–316. [Google Scholar] [CrossRef]
- Hoehndorf, R. What is an Upper Level Ontology? Available online: http://ontogenesis.knowledgeblog.org/740 (accessed on 13 April 2010).
- Defining N-ary Relations on the Semantic Web. 2017. Available online: https://www.w3.org/TR/swbp-n-aryRelations/ (accessed on 2 November 2017).
- Maria Poveda, M.C.S. Ontology Design Pattern. Available online: http://ontologydesignpatterns.org/wiki/Submissions:Symmetric_n-ary_relationship (accessed on 1 November 2017).
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Längkvist, M.; Kiselev, A.; Alirezaie, M.; Loutfi, A. Classification and Segmentation of Satellite Orthoimagery Using Convolutional Neural Networks. Remote Sens. 2016, 8, 329. [Google Scholar] [CrossRef]
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; Susstrunk, S. SLIC superpixels compared to state-of-the-art superpixel methods. Pattern Anal. Mach. Intell. IEEE Trans. 2012, 34, 2274–2282. [Google Scholar] [CrossRef] [PubMed]
- OpenStreetMap. 2017. Available online: http://www.openstreetmap.org/ (accessed on 2 November 2017).
- Alirezaie, M.; Längkvist, M.; Kiselev, A.; Loutfi, A. Open GeoSpatial Data as a Source of Ground Truth for Automated Labelling of Satellite Images. In Proceedings of the Workshop on Spatial Data on the Web (SDW 2016) Co-Located with The 9th International Conference on Geographic Information Science (GIScience 2016), Montreal, QC, Canada, 27–30 September 2016; pp. 5–8. [Google Scholar]
- Gangemi, A.; Guarino, N.; Masolo, C.; Oltramari, A.; Schneider, L. Sweetening ontologies with DOLCE. In Proceedings of the 13th International Conference on Knowledge Engineering and Knowledge Management, Sigüenza, Spain, 1–4 October 2002. [Google Scholar]
- Teh, C.H.; Chin, R.T. On the Detection of Dominant Points on Digital Curves. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 859–872. [Google Scholar] [CrossRef]
- Ramer, U. An iterative procedure for the polygonal approximation of plane curves. Comput. Graph. Image Process. 1972, 1, 244–256. [Google Scholar] [CrossRef]
- Douglas, D.H.; Peucker, T.K. Algorithms for the Reduction of the Number of Points Required to Represent a Digitized Line or its Caricature. In Classics in Cartography: Reflections on Influential Articles from Cartographica; Wiley Online Library: Hoboken, NJ, USA, 2011; pp. 15–28. [Google Scholar]
- Carroll, J.J.; Dickinson, I.; Dollin, C.; Reynolds, D.; Seaborne, A.; Wilkinson, K. Jena: Implementing the Semantic Web Recommendations. In Proceedings of the 13th International World Wide Web Conference on Alternate Track Papers & Posters (WWW Alt. ’04), New York, NY, USA, 19–21 May 2004; ACM: New York, NY, USA, 2004; pp. 74–83. [Google Scholar]
- Guttman, A. R-trees: A Dynamic Index Structure for Spatial Searching. In Proceedings of the 1984 ACM SIGMOD International Conference on Management of Data (SIGMOD ’84), Boston, MA, USA, 18–21 June 1984; ACM: New York, NY, USA, 1984; pp. 47–57. [Google Scholar]
- Jaillet, L.; Cortés, J.; Siméon, T. Sampling-Based Path Planning on Configuration-Space Costmaps. IEEE Trans. Robot. 2010, 26, 635–646. [Google Scholar] [CrossRef]
- Lavalle, S.M.; Kuffner, J.J., Jr. Rapidly-Exploring Random Trees: Progress and Prospects. Available online: http://citeseerx.ist.psu.edu/viewdoc/download;jsessionid=5981B6747F51611A5FD1E02C563FF0F7?doi=10.1.1.38.1387&rep=rep1&type=pdf (accessed on 5 November 2017).
- Karaman, S.; Frazzoli, E. Sampling-Based Algorithms for Optimal Motion Planning. Int. J. Robit. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Yang, L.; Qi, J.; Song, D.; Xiao, J.; Han, J.; Xia, Y. Survey of Robot 3D Path Planning Algorithms. J. Control Sci. Eng. 2016, 2016. [Google Scholar] [CrossRef]
- Alirezaie, M.; Kiselev, A.; Klügl, F.; Längkvist, M.; Loutfi, A. Exploiting Context and Semantics for UAV Path-Finding in an Urban Setting. Available online: http://ceur-ws.org/Vol-1935/paper-02.pdf (accessed on 5 November 2017).
- Preetham, A.J.; Shirley, P.; Smits, B. A practical analytic model for daylight. In Proceedings of the 26th Annual Conference on Computer Graphics and Interactive Techniques (SIGGRAPH ’99), Los Angeles, CA, USA, 8–13 August 1999; pp. 91–100. [Google Scholar]
- Vricon, Homepage. 2017. Available online: http://www.vricon.com (accessed on 31 July 2017).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band | Bandwidth (nm) | Description |
|---|---|---|
| Red | 630–690 | Vegetation types, soils, and urban features |
| Green | 510–580 | Water, oil-spills, vegetation, and man-made features |
| Blue | 450–510 | Shadows, soil, vegetation, and man-made features |
| Yellow | 585–625 | Soils, sick foliage, hardwood, larch foliage |
| Coastal | 400–450 | Shallow waters, aerosols, dust, and smoke |
| Seafloor | 400–580 | Synthetic image band (Green, Blue, Coastal) |
| NIR1 (Near Infra-Red) | 770–895 | Plant health, shorelines, biomass, vegetation |
| NIR2 | 860–1040 | Similar to NIR1 |
| Pansharpened | 450–800 | High-resolution pan andlow-resolution multispectral |
| Soil | 585–625, 705–745, 770–895 | Synthetic image band (NIR1, Yellow, Red Edge) |
| Landcover | 400–450, 585–625, 860–1040 | Synthetic image band (NIR2, Yellow, Coastal) |
| Panchromatic | 450–800 | Blend of visible light into a grayscale |
| Red Edge | 705–745 | Vegetation changes |
| Vegetation | 450–510, 510–580, 770–895 | Synthetic image band (NIR1, Green, Blue) |
| DSM | - | Digital surface model |
| Vegetation | Ground | Road | Bridge | Building | Water | Railroad | |
|---|---|---|---|---|---|---|---|
| Vegetation | 95.6 | 1.1 | 0.3 | 1.4 | 0.3 | 0.9 | 2.9 |
| Ground | 1.2 | 95.0 | 0.6 | 0.7 | 0.1 | 0.8 | 1.7 |
| Road | 0.2 | 1.3 | 94.1 | 3.4 | 0.1 | 0.4 | 3.8 |
| Bridge | 0.7 | 0.7 | 1.9 | 78.7 | 7.2 | 2.4 | 3.6 |
| Building | 0.2 | 0.1 | 0.1 | 9.2 | 91.0 | 0.4 | 0.9 |
| Water | 0.5 | 0.7 | 0.5 | 2.7 | 0.6 | 93.3 | 2.4 |
| Railroad | 1.5 | 1.1 | 2.5 | 3.8 | 0.6 | 1.9 | 84.7 |
| Segmentation | Region Types Separation | Flood Area Exclusion | |
|---|---|---|---|
| query time with | 3 s | 1.34 s | 1.69 s |
| query time without | 67 s | 13.52 s | 2.71 s |
| Without Ontology Pattern | With Ontology Pattern | |
|---|---|---|
| Success Rate | 24.2% | 91% |
| Average of execution time | 8.4 s | 0.68 s |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alirezaie, M.; Kiselev, A.; Längkvist, M.; Klügl, F.; Loutfi, A. An Ontology-Based Reasoning Framework for Querying Satellite Images for Disaster Monitoring. Sensors 2017, 17, 2545. https://doi.org/10.3390/s17112545
Alirezaie M, Kiselev A, Längkvist M, Klügl F, Loutfi A. An Ontology-Based Reasoning Framework for Querying Satellite Images for Disaster Monitoring. Sensors. 2017; 17(11):2545. https://doi.org/10.3390/s17112545
Chicago/Turabian StyleAlirezaie, Marjan, Andrey Kiselev, Martin Längkvist, Franziska Klügl, and Amy Loutfi. 2017. "An Ontology-Based Reasoning Framework for Querying Satellite Images for Disaster Monitoring" Sensors 17, no. 11: 2545. https://doi.org/10.3390/s17112545
APA StyleAlirezaie, M., Kiselev, A., Längkvist, M., Klügl, F., & Loutfi, A. (2017). An Ontology-Based Reasoning Framework for Querying Satellite Images for Disaster Monitoring. Sensors, 17(11), 2545. https://doi.org/10.3390/s17112545