1. Introduction
Power line cables supported by transmission towers carry electrical power from a power plant to an electrical substation. Tower structures have been widely used to transmit high voltage current and more than 40,000 towers have been constructed in South Korea [
1]. These towers and power line cables are constructed considering safety, as well as economic feasibility. The interval between the towers should be sufficiently long to minimize the number of towers, but sufficiently short to ensure minimum tension while providing safe clearance from the ground.
The periodic 3D mapping of power lines is critical for power line maintenance. Power lines are mostly fabricated of ACSR (aluminum-conductor steel-reinforced cable) and are constructed with a proper dip by loosening the cable. The power line dip is defined as the difference in level between the points of support and the lowest point on the line. Maintaining the proper dip is important because, while a large dip decreases the tension for better safety, it also decreases the clearance from the ground. When power lines stretch and sag with the changing weather, they can eventually exceed the planned tolerances. Excessive sagging can cause serious accidents and degrade the durability of the power lines. In addition, the sagging cables can sway in strong winds, touching adjacent topographic features.
Many remotely-sensed data products, such as SAR (synthetic aperture radar), thermal sensor, LiDAR (light detection and ranging), land-based mobile mapping data, and UAV (unmanned aerial vehicle), have been studied for power line surveys [
2]. Limiting the scope of application to the power line extraction, LiDAR systems on airplanes and helicopters have been used to create and extract point clouds of power lines [
3,
4,
5]. While the systems offer the sufficient elevation accuracy within ±15 cm, the operation of the system is often limited by high cost and local conditions, such as flight restrictions. Recently, compact and lightweight LiDAR sensors have been introduced to the market, although their performance is limited in terms of scan speed and measurement rate. Lately, drone systems with photogrammetric capability have strong potential for data acquisition and the 3D mapping of facilities in small areas. Drone systems, such as quadcopters, have gained popularity because of their agility, low lost, and hardware compatibility. A commercial low-cost drone comprises a 4K camera with a three-axis gimbal for photogrammetric use and offers autonomous flight for easy and safe data acquisition. Kuhnert and Kuhnert [
6] presented mini and micro drones including a laser scanner for 3D monitoring of high voltage power lines. Liu et al. [
7] established a flying robot mission-planning system for power line inspection and Ceron et al. [
8] generated a process for navigation based in tower detection. Some studies have been carried out in which drones are used for power line inspections [
9,
10]. However, in these studies, the aerial images had only limited uses of manual inspection, orthophoto generation, and color information for 3D point cloud acquired from LiDAR. It is worth mentioning that low-cost drone systems have limitations of the battery capacity that only allows 10–20 min of flight. Additinoally, the systems may not be operated under severe weather conditions, such as strong wind.
Regarding the automated power line extraction in 2D aerial image space, Li et al. [
11] presented a method including a pulse coupled neural filter and Hough transform to detect power lines on image. Sharma et al. [
12] proposed an adaptive thresholding with a morphological filter to detect power lines on oblique video images. They reported less than 3% false positives. Yang et al. [
13] used the Hough transform and a fuzzy C-means clustering to tolerate noise from complicated backgrounds for power line detection from UAV video images.
Some studies utilized 3D point cloud extraction of power lines from multiple aerial images. Yan et al. [
14] used aerial images from an aerial digital camera onboard a helicopter for the power line extraction. A Radon transform and the Kalman filter were used to extract and connect the line segments into an entire line. The results were statistically analyzed for the extraction length in the image space. Zhang et al. [
15] used a fixed wing UAV for the power line inspection proposing a semi-patch matching algorithm based on an epipolar geometry of stereo images. They reported the experimental results of the elevation accuracy of 0.5 m. Jozkow et al. [
16] carried out the dense image matching for point cloud generation and filtering for the 3D modeling of power lines that they reported a fitting accuracy of 5–9 cm. These approaches follow the conventional image-to-object space approach that is comprised of line detection, image matching, and 3D reconstruction.
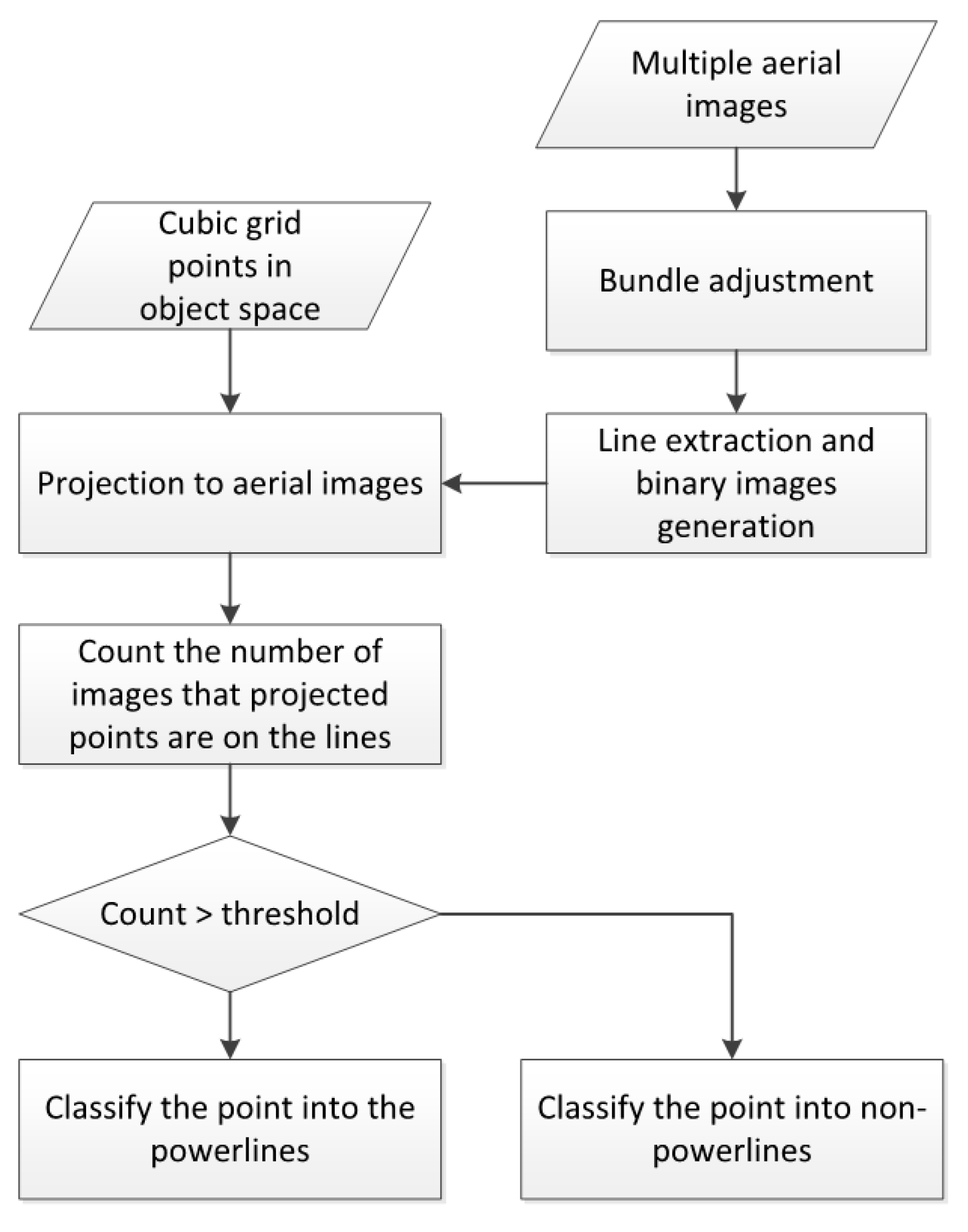
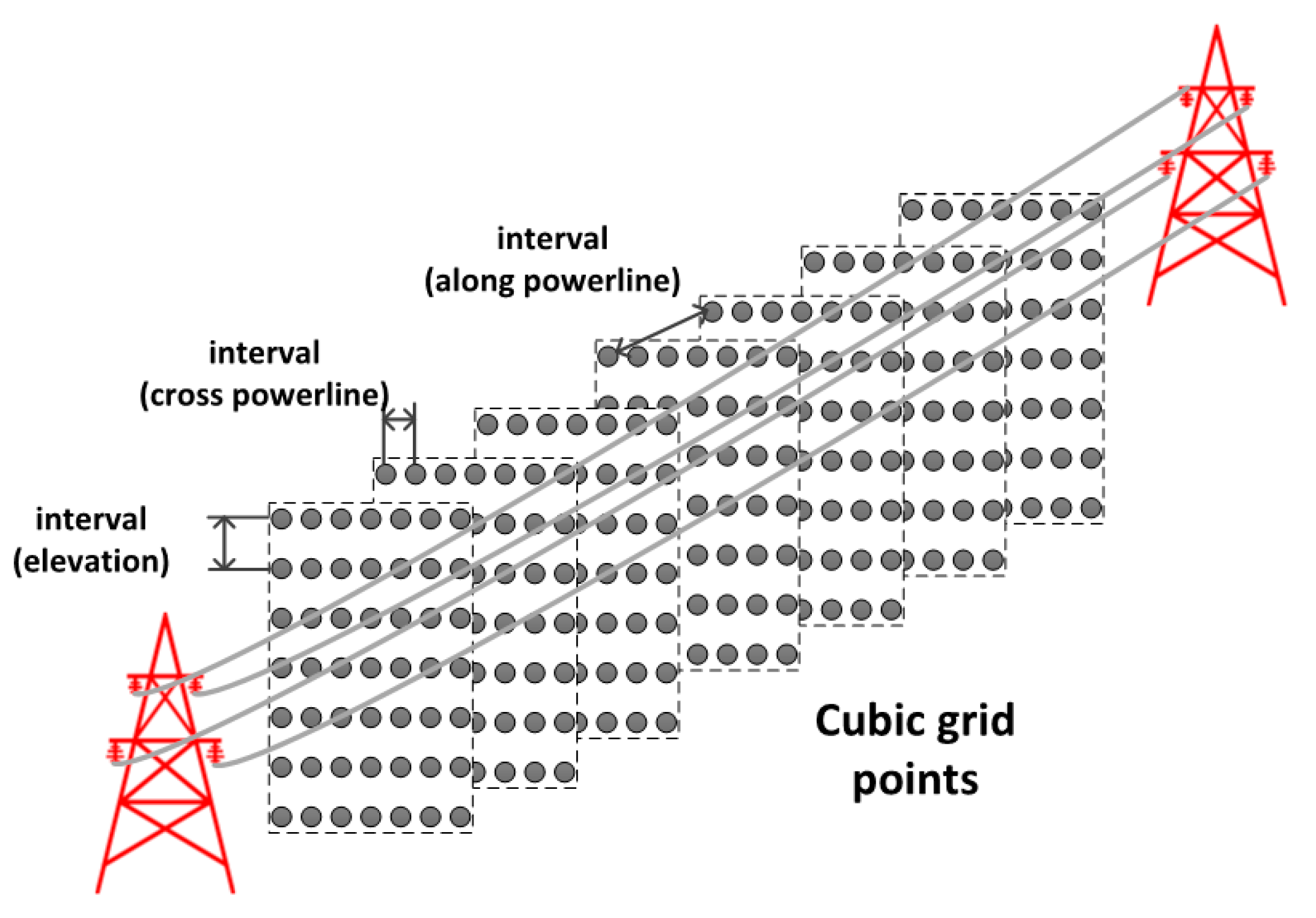
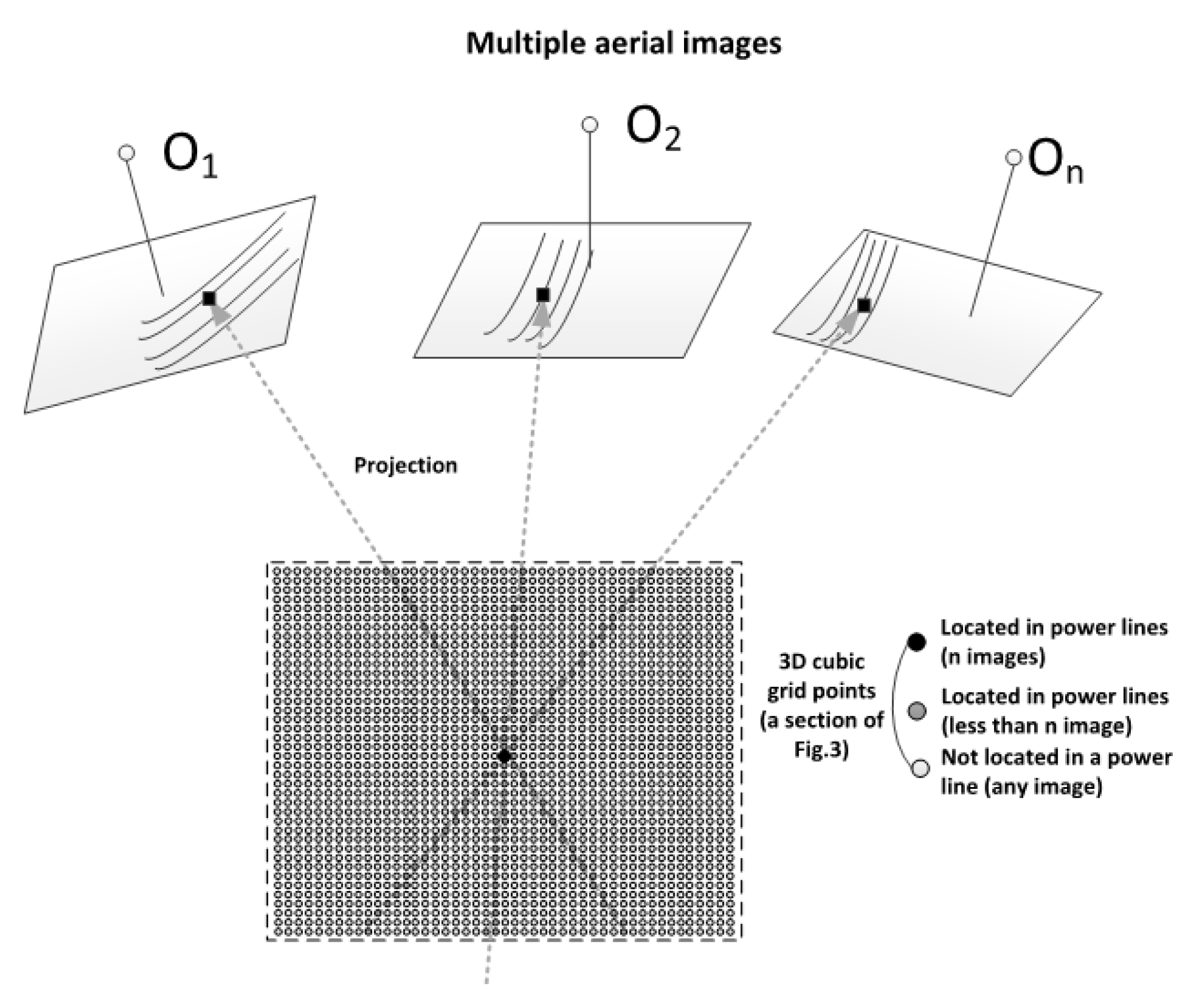
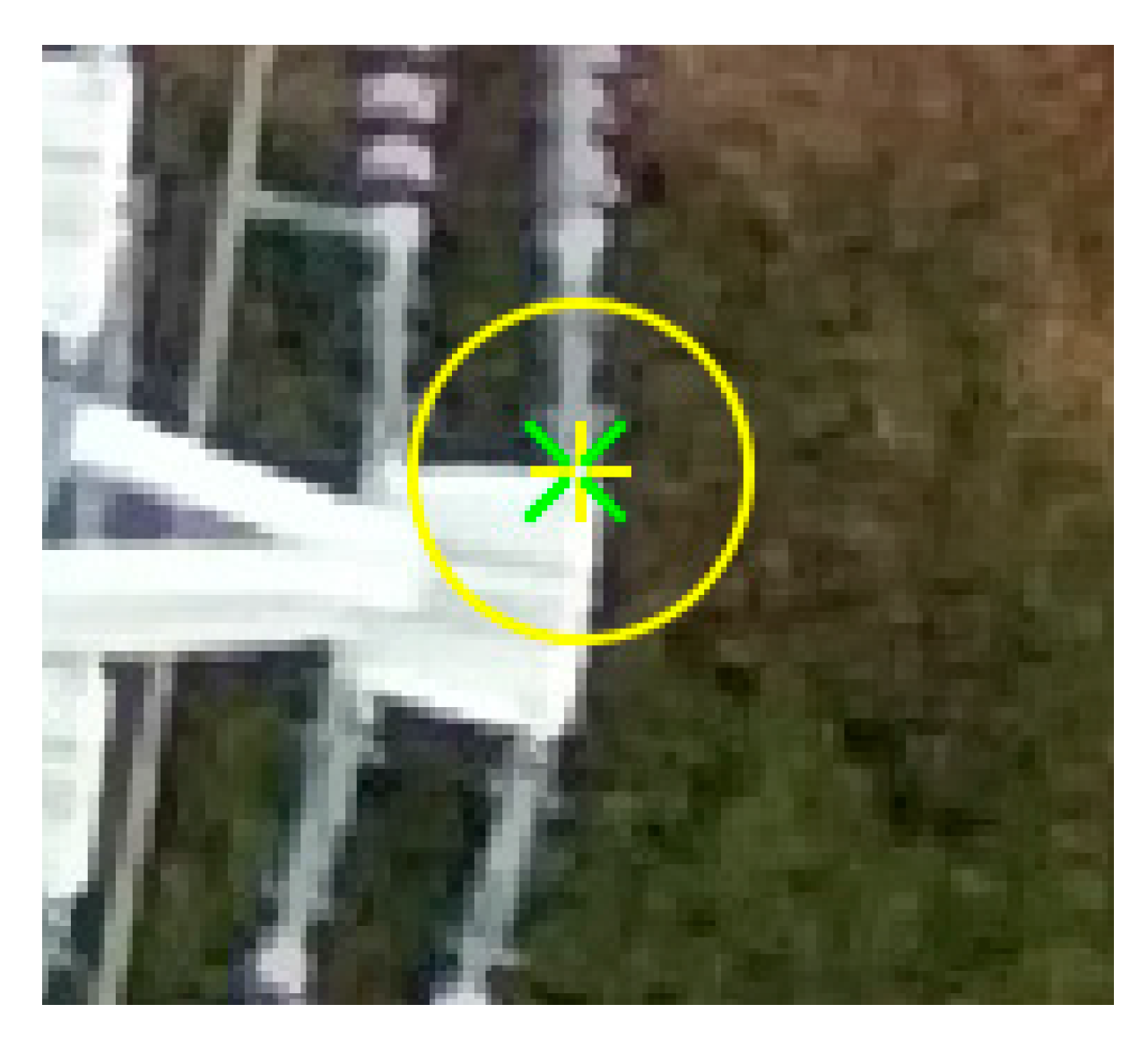
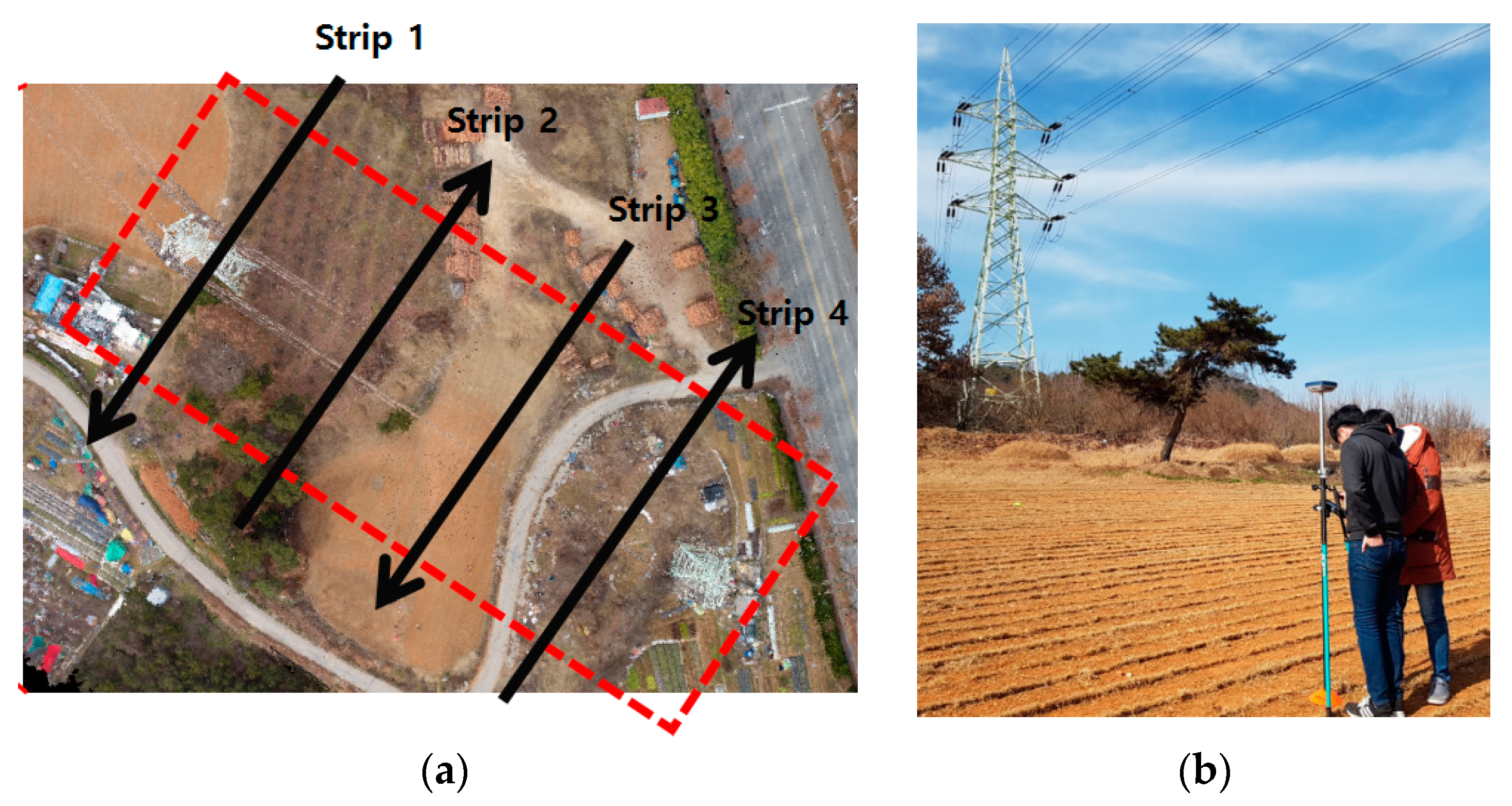
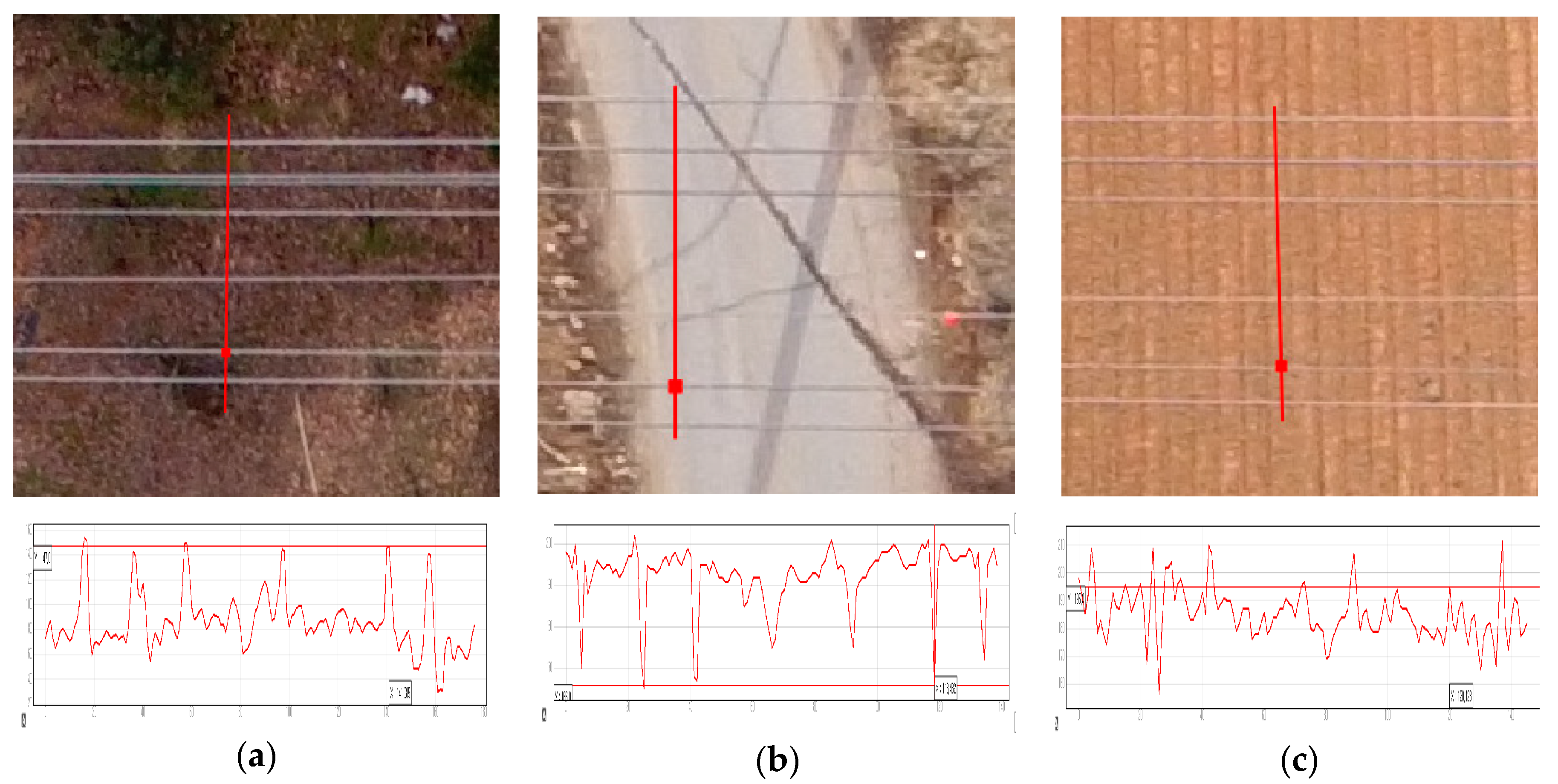
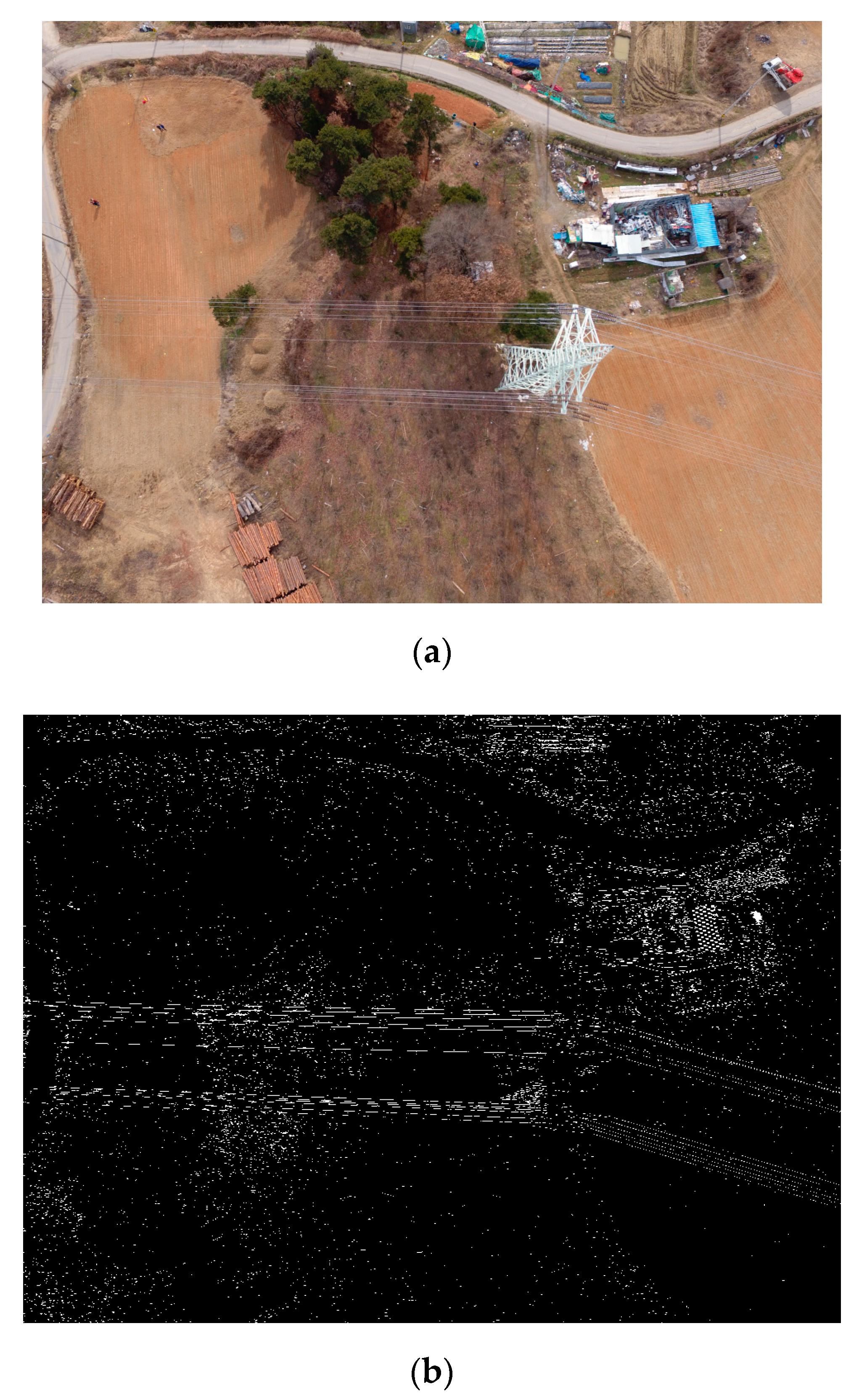
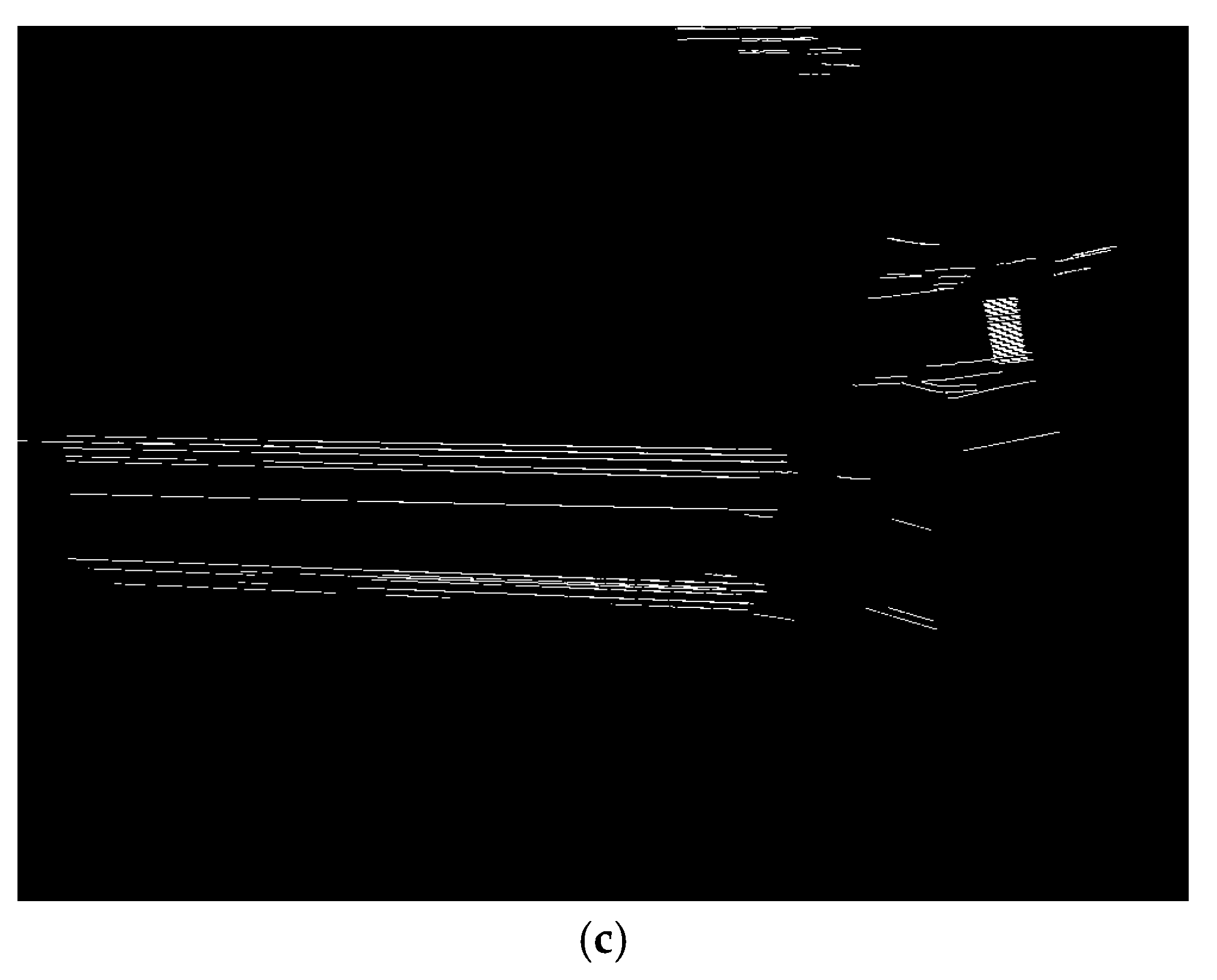
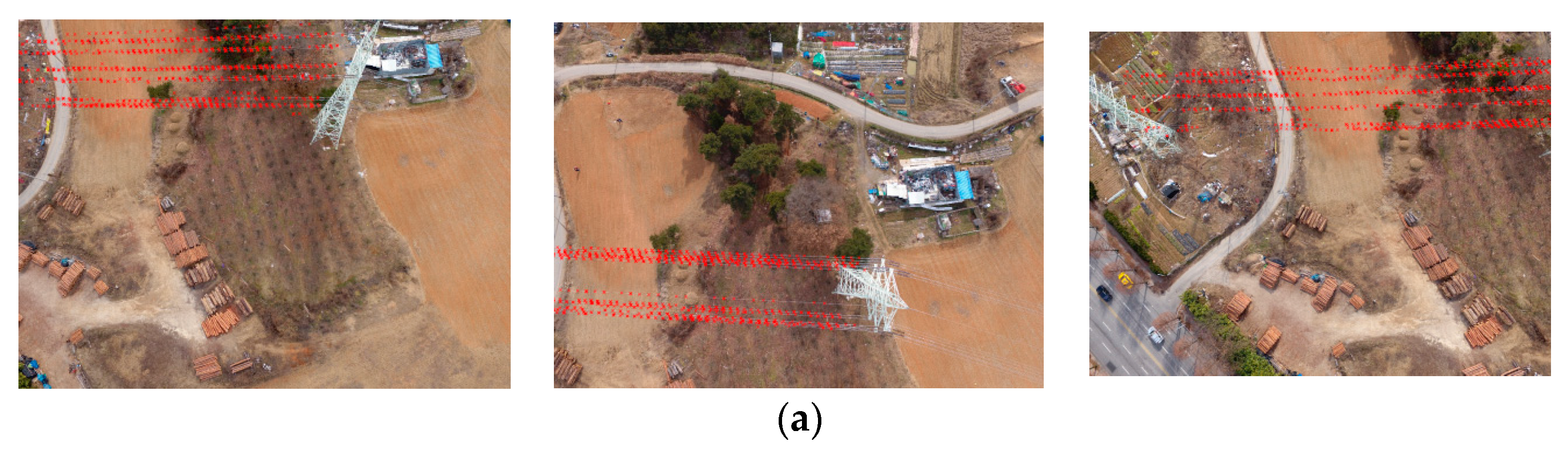
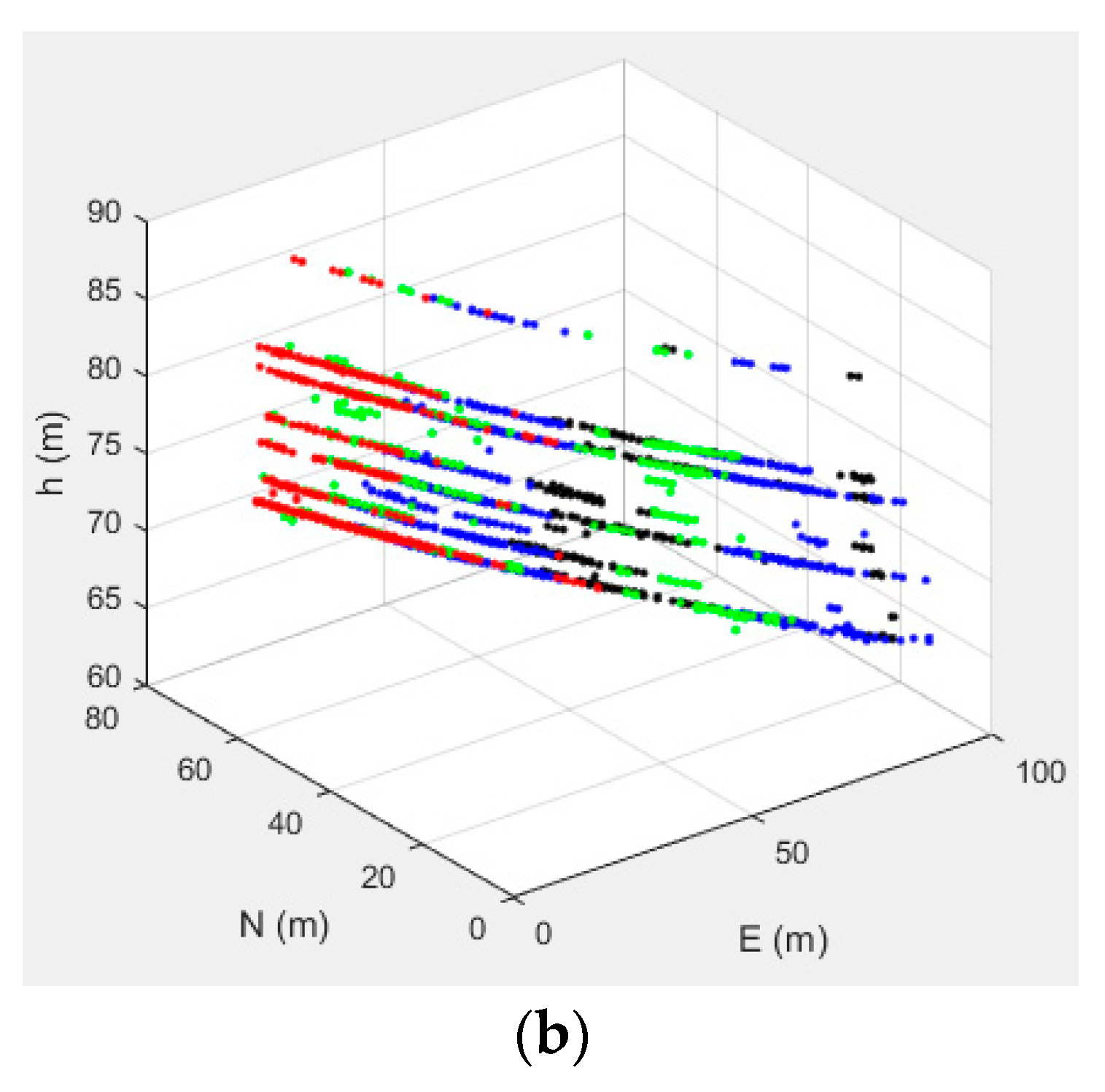
In this study, we proposed the object-to-image space approach using cubic grid points for 3D power line mapping. The aim of the study was to derive 3D power line point cloud from multiple aerial images acquired using a low-cost drone. In the method, each aerial image provides 2D power line primitives that are used to filter the dense 3D cubic grid points generated around the power line on the ground. The relation between the image and object spaces is established by performing accurate bundle adjustment.
The paper is structured as follows: In
Section 2, the proposed method is explained and the bundle adjustment, line segment extraction, and cubic grid generation and filtering are discussed. The experimental results are presented in
Section 3, followed by conclusions in
Section 4.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

