
A Two-Phase Coverage-Enhancing Algorithm for Hybrid Wireless Sensor Networks



Abstract
:1. Introduction
2. Related Work
- Propose a novel coverage-enhancing algorithm based on DE for WSNs. The algorithm can achieve a balance between network coverage and mobile sensor moving distance.
- Propose a moving-distance optimization scheme which can reduce the number of mobile sensors needed to be moved as well as greatly reduce the overall moving cost.
3. The Two-Phase Coverage-Enhancing Algorithm
3.1. Initial Assumptions
- (1)
- All sensors have the same sensing range Rs and communication range Rc = 2Rs.
- (2)
- Each sensor knows its location by a certain mechanism, such as Global Positioning System (GPS), and the location information can be sent to the base station (BS).
- (3)
- Mobile sensor nodes are able to move to the scheduled positions, where the scheduled positions are within their mobility range.
- (4)
- The proposed algorithm is implemented in a centralized architecture, and the BS is responsible for the execution of the algorithm and broadcasting the movement plan of mobile sensors.
3.2. Problem Formulation
3.3. Phase I: The Coverage-Enhancing Algorithm Based on Differential Evolution (CEADE)
3.3.1. Coding and Initialization
3.3.2. Mutation
3.3.3. Crossover
3.3.4. Selection
3.3.5. Termination Condition
3.4. Phase II: Refinement
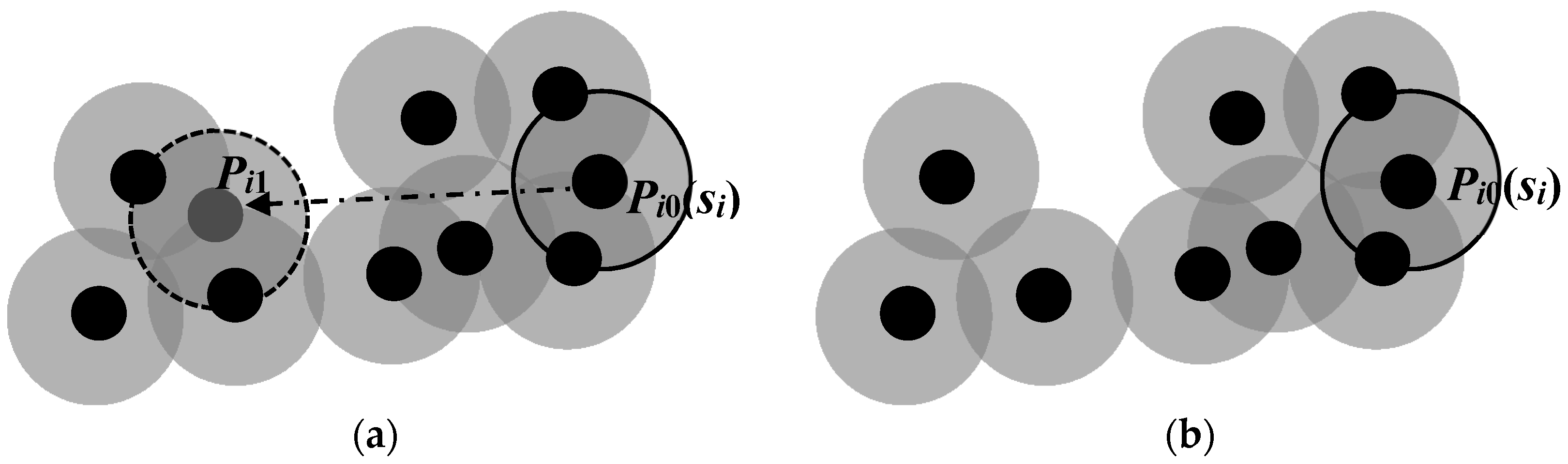
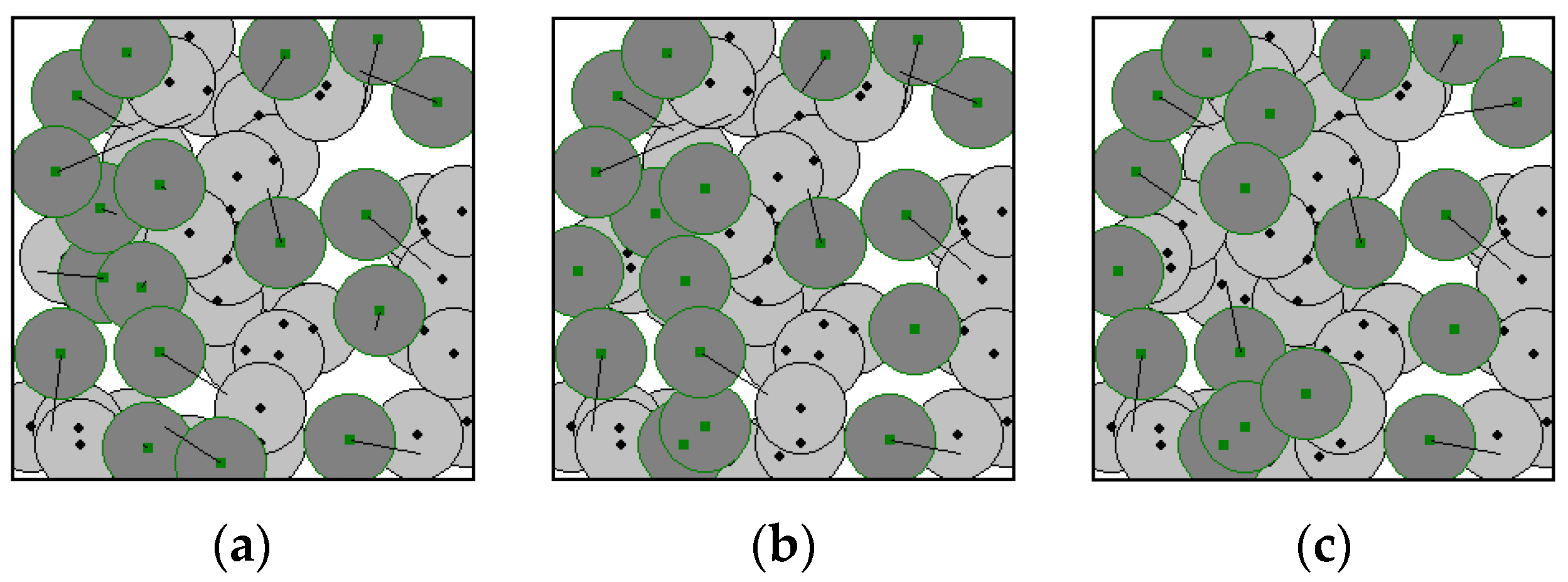
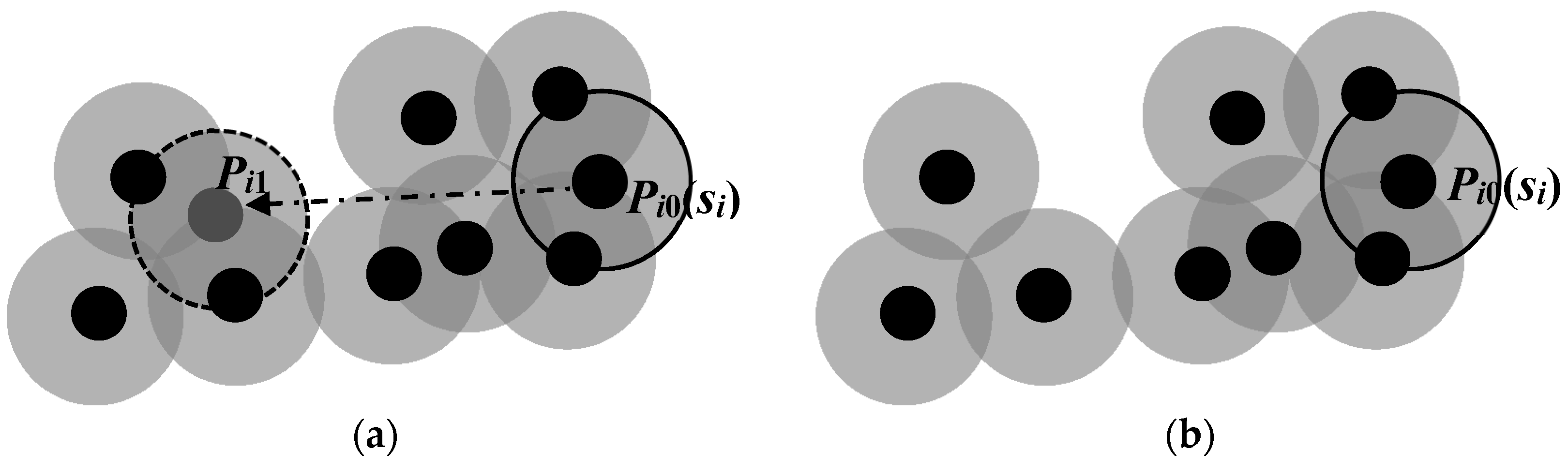
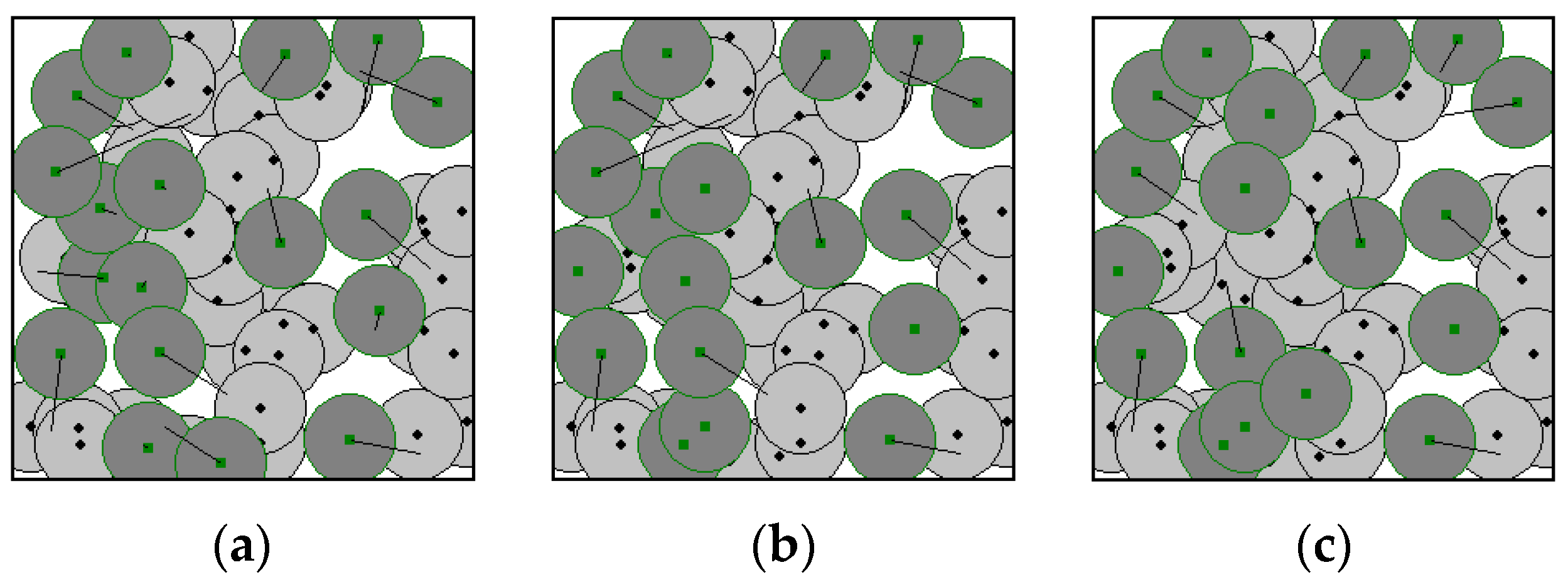
- Reduce the number of mobile sensor nodes that need to be moved. Since our DE algorithm searches for target positions of all mobile sensors simultaneously, the sensing areas of some sensors may be overlapping when they are located in their candidate target positions. The sensing areas of some mobile sensors may even be fully covered by those of the other sensors. In that case, such mobile sensors can be viewed as redundant nodes if they move to their candidate target positions, which means they do not need to move at the very beginning. As shown in Figure 1, small black solid circles represent sensor nodes and large gray solid circles represent the sensing areas of sensors. When sensor si moves from Pi0 to Pi1, the regional coverage rate Rarea(S) has no change, so we can infer that sensor si does not need to move. The number of mobile sensors that need to be moved can be reduced by this means, which can reduce the total moving distance of the mobile sensors.
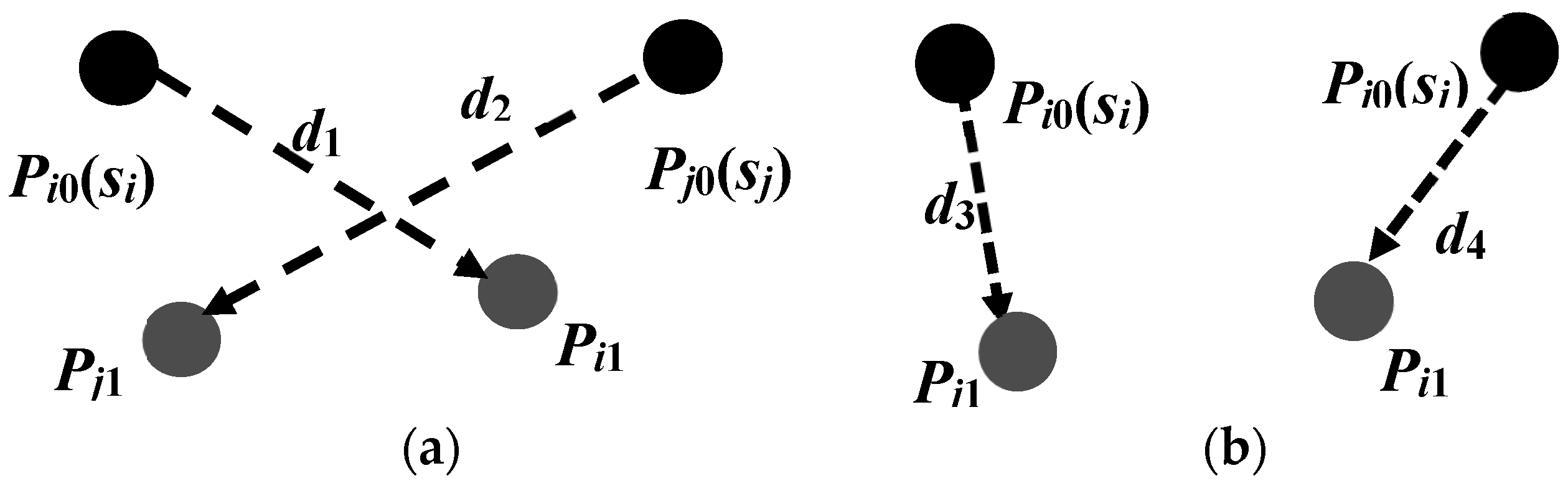
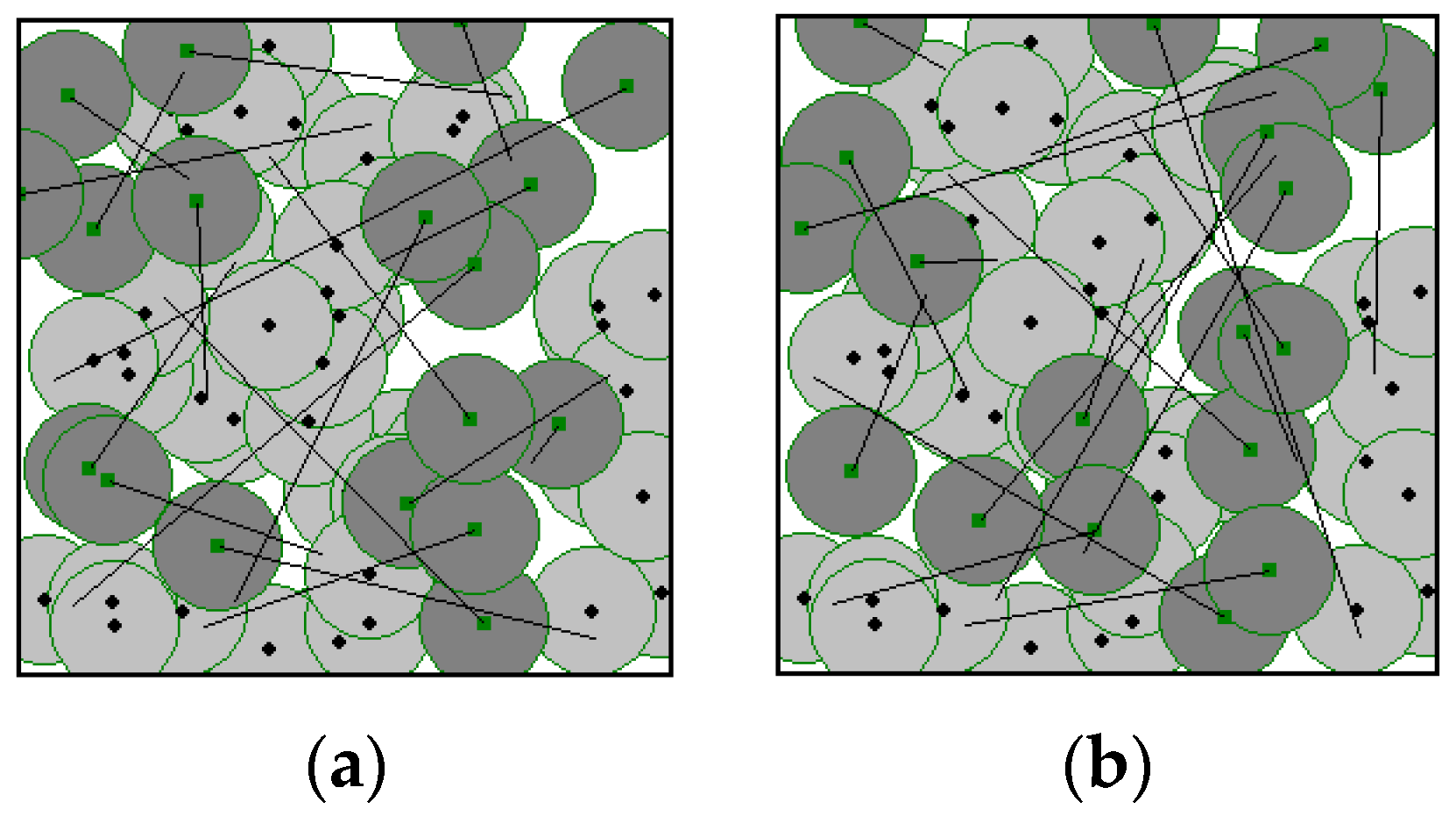
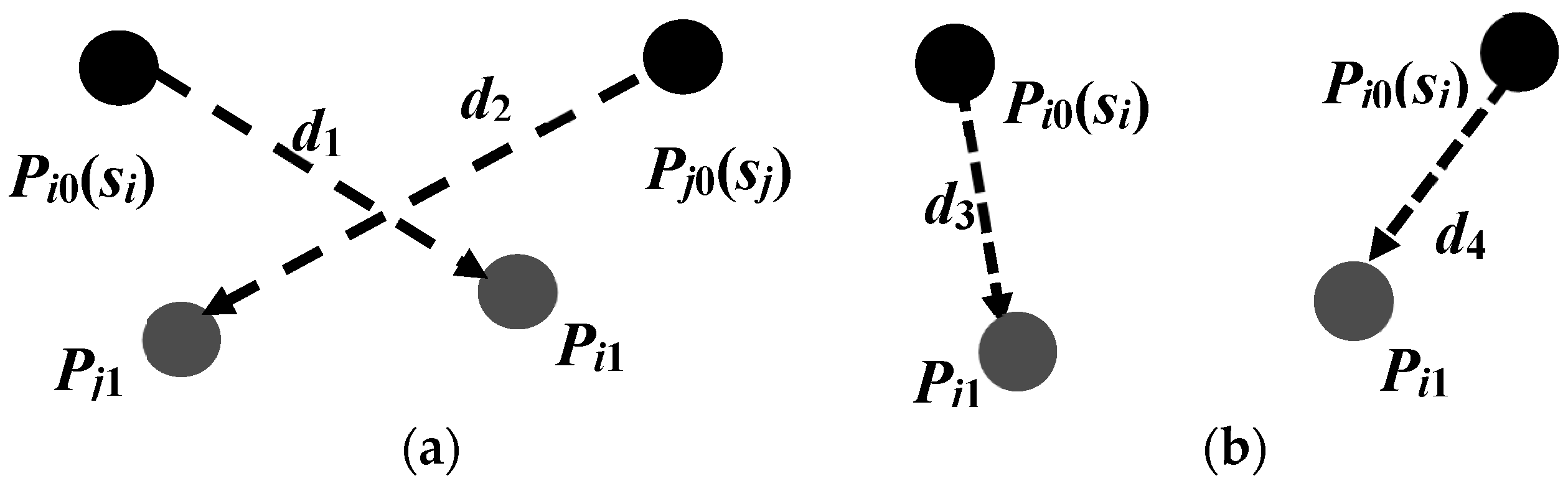
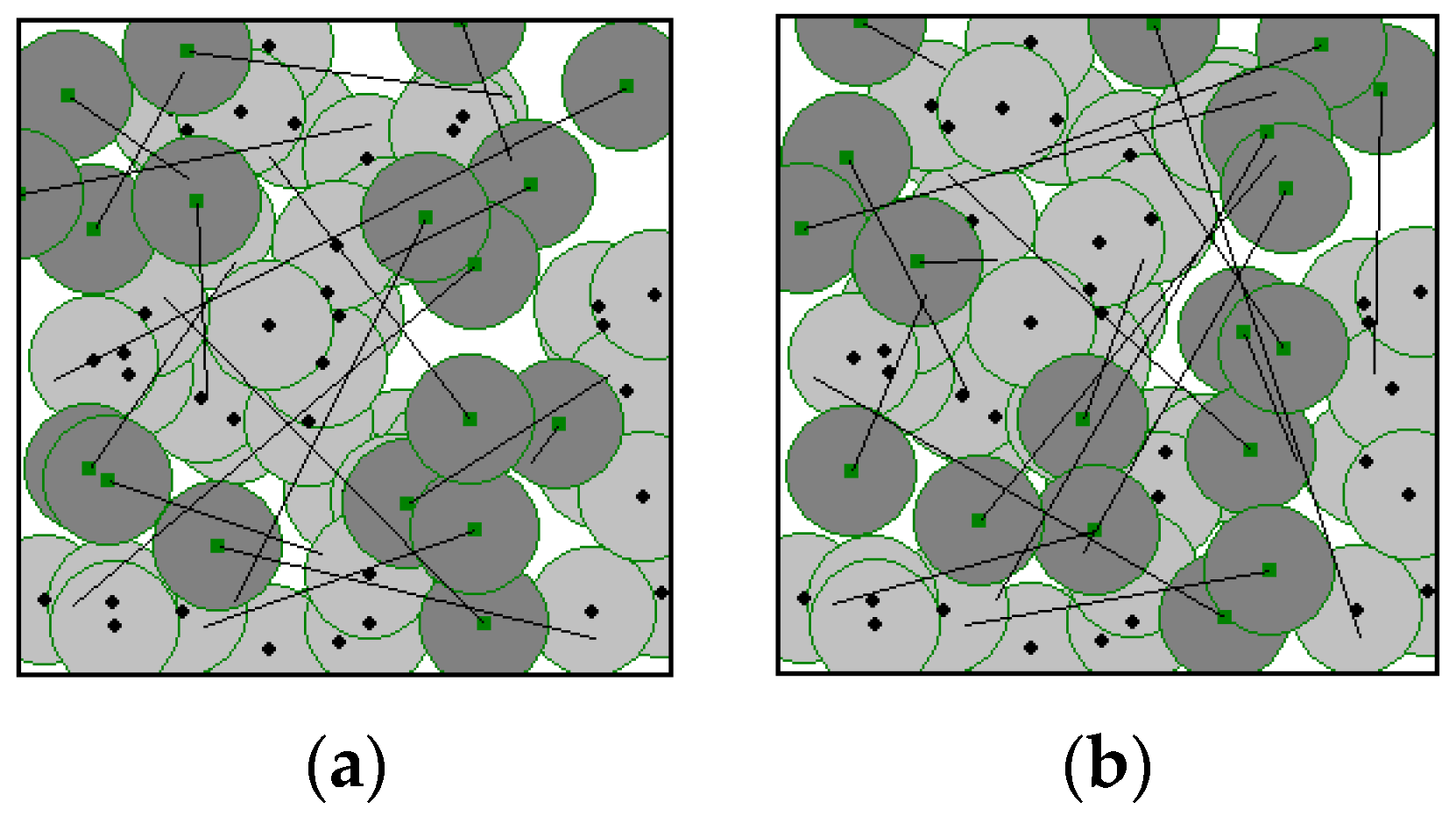
- Exchange the candidates’ target positions of two mobile sensor nodes if this can reduce the total moving distance of mobile sensors. Figure 2a shows that the total moving distance of si and sj is d1 + d2 before exchanging the total moving distance, while Figure 2b shows that the total moving distance is d3 + d4 after exchange. Since d1 + d2 > d3 + d4, the total moving distance of si and sj can be reduced after the exchange of the candidate target positions. Furthermore, the coverage area of the sensor network will not change after such an exchange, but the area coverage-distance rate will increase.
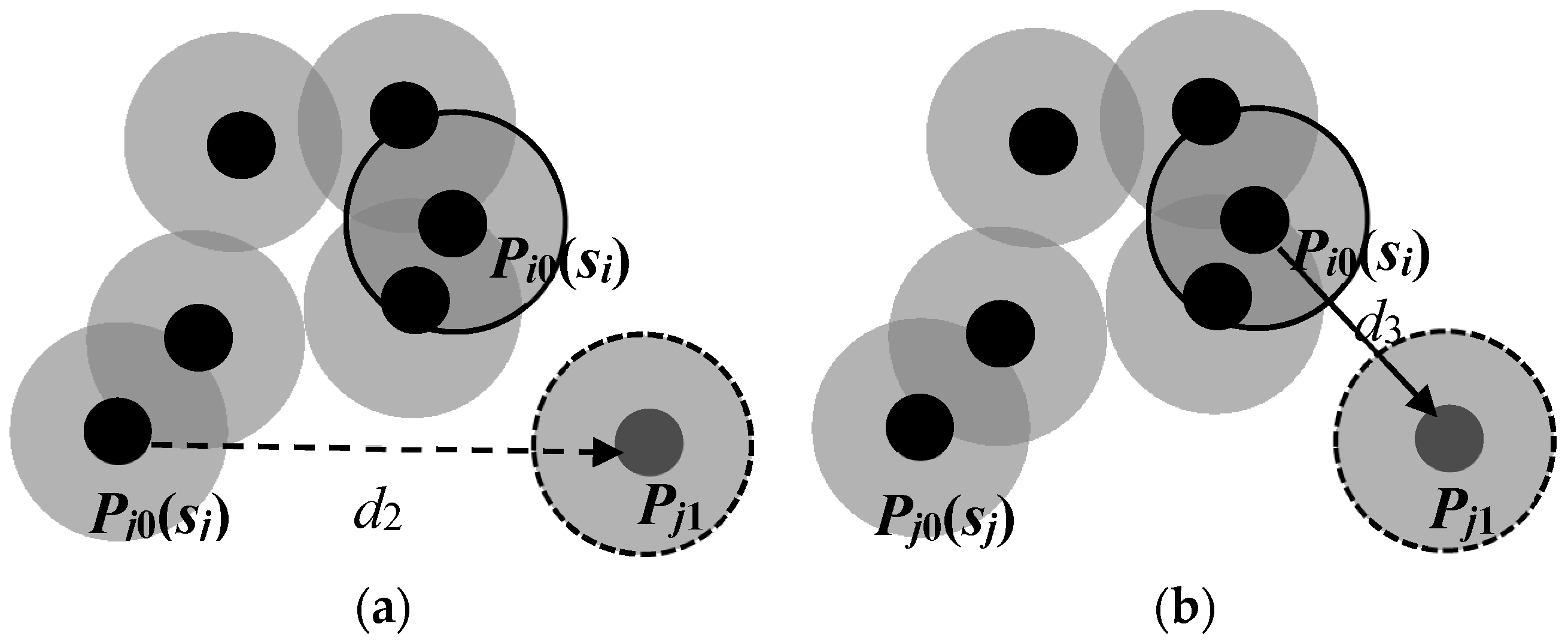
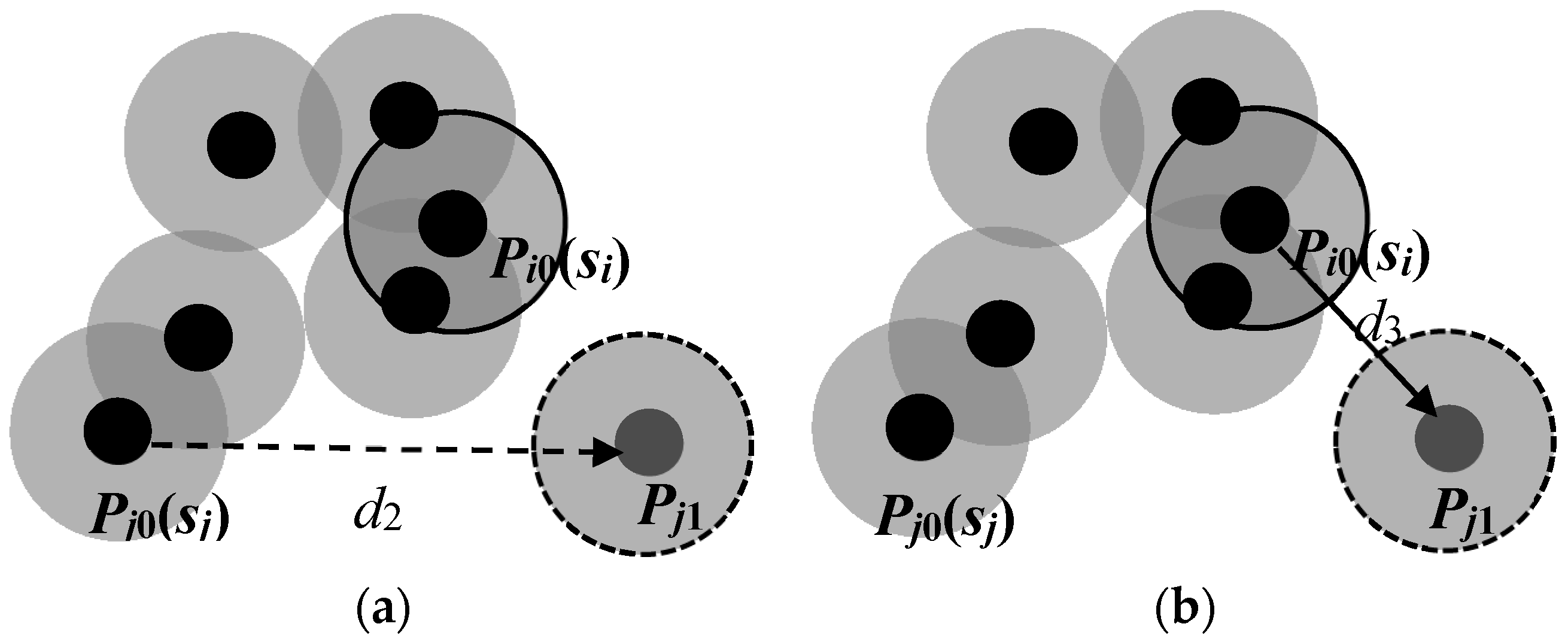
- Replace the movement of the mobile sensor node that needs to move by that of a substitute mobile sensor node that does not need to move. The goal of this step is to avoid making a mobile sensor move for a long distance because moving a sensor for a long distance consumes too much energy. If the sensor is out of power shortly after it reaches the destination, this movement is wasted and another mobile sensor has to be found and relocated [13]. The condition of the replacement is that the movement can reduce the total moving distance but without reducing the coverage area of the sensor network. As shown in Figure 3a, sensor si does not need to move, and sensor sj is planned to move from Pj0 to Pj1. Let A1 be the coverage area of the sensor network in Figure 3a after sensor sj moves from Pj0 to Pj1, and A2 be the coverage area of the sensor network in Figure 3b after sensor si moves from Pi0 to Pj1 but sj remains static. Since A2 ≥ A1 and d3 < d2, the algorithm will make sensor si instead of sj move to the candidate target position of sensor sj while sensor sj remains static. This replacement neither reduces the coverage area of the sensor network, nor increases the number of mobile sensors needed to move. Instead, it reduces the average moving distance of mobile sensors and thus improves the area coverage–distance rate.
| Algorithm 1. Pseudocode for the moving distance reduction scheme. |
| /* Pi0(xi0,yi0) and Pi1(xi1,yi1) are the initial position and the candidate target position of the ith mobile sensor si, i = 1, …, m. */ 1. For i = 1 to m do 2. moved[i] = true 3. For i = 1 to m do 4. P = Pi1, Pi1 = Pi0 5. If (Rarea(S) reduces) Pi1 = P; moved[i] = false; 6. end; 7. For i = 1 to m do 8. For j = 1 to m do 9. d1 = , d2 = , d3 = , d4 = . 10. If (i ≠ j) and (moved[i]) and (moved[j]) and (d1 + d2 > d3 + d4) 11. Pi1↔Pj1 12. end 13. For j: = 1 to m do 14. For i: = 1 to m do 15. d2 = , d3 = 16. if (moved[j]) and (not moved[i]) 17. if (d2 > d3) P = Pj1,Pi1 = Pj1,Pj1 = Pj0 18. if (Rarea(S) reduces ) Pj1 = P; Pi1 = Pi0 19. end |
4. Experimental Results
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Wang, W.; Srinivasan, V.; Chua, K.C. Coverage in hybrid mobile sensor networks. IEEE Trans. Mob. Comput. 2008, 7, 1374–1387. [Google Scholar] [CrossRef]
- Wark, T.; Corke, P.; Sikka, P.; Klingbeil, L.; Guo, Y.; Crossman, C.; Valencia, P.; Swain, D.; Bishop-Hurley, G. Transforming agriculture through pervasive wireless sensor networks. IEEE Pervasive Comput. 2007, 6, 50–57. [Google Scholar] [CrossRef]
- Wang, D.; Liu, J.; Zhang, Q. On mobile sensor assisted field coverage. ACM Trans. Sens. Netw. 2013, 9, 22. [Google Scholar] [CrossRef]
- Zhao, Y.; Fan, X.; Xu, C.Z.; Li, X. ER-CRLB: An Extended Recursive Cramér-Rao Lower Bound Fundamental Analysis Method for Indoor Localization Systems. IEEE Trans. Veh. Technol. 2016. [Google Scholar] [CrossRef]
- Wang, G.; Cao, G.; LaPorta, T. A bidding protocol for deploying mobile sensors. In Proceedings of the 2003 11th IEEE International Conference on Network Protocols, Atlanta, GA, USA, 4–7 November 2003; IEEE: New York, NY, USA, 2003; pp. 315–324. [Google Scholar]
- Wang, B.; Lim, H.B.; Ma, D. A survey of movement strategies for improving network coverage in wireless sensor networks. Comput. Commun. 2009, 32, 1427–1436. [Google Scholar] [CrossRef]
- Wang, Y.C.; Hu, C.C.; Tseng, Y.C. Efficient placement and dispatch of sensors in a wireless sensor network. IEEE Trans. Mob. Comput. 2008, 7, 262–274. [Google Scholar] [CrossRef]
- Wang, Y.C.; Tseng, Y.C. Distributed deployment schemes for mobile wireless sensor networks to ensure multilevel coverage. IEEE Trans. Parallel Distrib. Syst. 2008, 19, 1280–1294. [Google Scholar] [CrossRef]
- Heo, N.; Varshney, P.K. Energy-efficient deployment of intelligent mobile sensor networks. IEEE Trans. Syst. Man Cybern. A Syst. Hum. 2005, 35, 78–92. [Google Scholar] [CrossRef]
- Poduri, S.; Sukhatme, G.S. Constrained coverage for mobile sensor networks. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, ICRA’04, New Orleans, LA, USA, 26 April–1 May 2004; IEEE: New York, NY, USA, 2004; Volume 1, pp. 165–171. [Google Scholar]
- Zou, Y.; Chakrabarty, K. Sensor deployment and target localization in distributed sensor networks. ACM Trans. Embed. Comput. Syst. 2004, 3, 61–91. [Google Scholar] [CrossRef]
- Wang, G.; Cao, G.; La Porta, T. Movement-assisted sensor deployment. IEEE Trans. Mob. Comput. 2006, 5, 640–652. [Google Scholar] [CrossRef]
- Wang, G.; Cao, G.; Porta, T.L.; Zhang, W. Sensor relocation in mobile sensor networks. In Proceedings of the IEEE 24th Annual Joint Conference of the IEEE Computer and Communications Societies, Miami, FL, USA, 13–17 March 2005; pp. 2302–2312.
- Wu, J.; Yang, S. Optimal movement-assisted sensor deployment and its extensions in wireless sensor networks. Simul. Model. Pract. Theory 2007, 15, 383–399. [Google Scholar] [CrossRef]
- Chellappan, S.; Bai, X.; Ma, B.; Xuan, D.; Xu, C. Mobility limited flip-based sensor networks deployment. IEEE Trans. Parallel Distrib. Syst. 2007, 18, 199–211. [Google Scholar] [CrossRef]
- Chellappan, S.; Gu, W.; Bai, X.; Xuan, D.; Ma, B.; Zhang, K. Deploying wireless sensor networks under limited mobility constraints. IEEE Trans. Mob. Comput. 2007, 6, 1142–1157. [Google Scholar] [CrossRef]
- Jiang, Z.; Wu, J.; Kline, R.; Krantz, J. Mobility control for complete coverage in wireless sensor networks. In Proceedings of the 28th International Conference on Distributed Computing Systems Workshops (ICDCS), Beijing, China, 17–20 June 2008; pp. 291–296.
- Yang, S.; Li, M.; Wu, J. Scan-based movement-assisted sensor deployment methods in wireless sensor networks. IEEE Trans. Parallel Distrib. Syst. 2007, 18, 1108–1121. [Google Scholar] [CrossRef]
- Yang, S.; Wu, J.; Dai, F. Localized movement-assisted sensor deployment in wireless sensor networks. In Proceedings of the IEEE Workshops in the International Conference on Mobile Adhoc and Sensor Systems (MASS), Vancouver, BC, Canada, 9–12 October 2006; pp. 753–758.
- Slijepcevic, S.; Potkonjak, M. Power efficient organization of wireless sensor networks. In Proceedings of the IEEE International Conference on Communications (ICC), Helsinki, Finland, 11–14 June 2001; Glisic, S., Ed.; IEEE: New York, NY, USA, 2001; pp. 472–476. [Google Scholar]
- Cardei, M.; Du, D.Z. Improving wireless sensor network lifetime through power aware organization. Wirel. Netw. 2005, 11, 333–340. [Google Scholar] [CrossRef]
- Yoon, Y.; Kim, Y.H. An Efficient Genetic Algorithm for Maximum Coverage Deployment in Wireless Sensor Networks. IEEE Trans. Cybern. 2013, 43, 1473–1483. [Google Scholar] [CrossRef] [PubMed]
- Ly, D.T.H.; Hanh, N.T.; Binh, H.T.T.; Nghia, N.D. An Improved Genetic Algorithm for Maximizing Area Coverage in Wireless Sensor Networks. In Proceedings of the Sixth International Symposium on Information and Communication Technology, Hue City, Vietnam, 3–4 December 2015; ACM: New York, NY, USA, 2015; pp. 61–66. [Google Scholar]
- Banimelhem, O.; Mowafi, M.; Aljoby, W. Genetic algorithm based node deployment in hybrid wireless sensor networks. Commun. Netw. 2013, 5, 39564. [Google Scholar] [CrossRef]
- Li, Z.; Lei, L. Sensor node deployment in wireless sensor networks based on improved particle swarm optimization. In Proceedings of the 2009 International Conference on Applied Superconductivity and Electromagnetic Devices, Chengdu, China, 25–27 September 2009; IEEE: New York, NY, USA, 2009; pp. 215–217. [Google Scholar]
- Wang, X.; Wang, S.; Ma, J.J. An improved co-evolutionary particle swarm optimization for wireless sensor networks with dynamic deployment. Sensors 2007, 7, 354–370. [Google Scholar] [CrossRef]
- Poduri, S.; Pattem, S.; Krishnamachari, B.; Sukhatme, G. A Unifying Framework for Tunable Topology Control in Sensor Networks; Technical Report, CRES-05-004; University of Southern California: Los Angeles, CA, USA, 2005; pp. 1–15. [Google Scholar]
- Wang, B. Coverage problems in sensor networks: A survey. ACM Comput. Surv. 2011, 43, 32. [Google Scholar] [CrossRef]
- Jin, L.; Jia, J.; Sun, D. Node distribution optimization in mobile sensor network based on multi-objective differential evolution algorithm. In Proceedings of the 2010 Fourth International Conference on Genetic and Evolutionary Computing (ICGEC), Shenzhen, China, 13–15 December 2010; IEEE: New York, NY, USA, 2010; pp. 51–54. [Google Scholar]
- Storn, R.; Price, K. Differential evolution a simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Van den Bergh, F.; Engelbrecht, A.P. A cooperative approach to particle swarm optimization. IEEE Trans. Evol. Comput. 2004, 8, 225–239. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Mobile Sensor Nodes | 18 | 36 | 54 | 72 | 90 | 108 | 126 |
| Number of static sensor nodes | 42 | 84 | 126 | 168 | 210 | 252 | 294 |
| Sensing range (m) | 10 | 7 | 5.7 | 4.9 | 4.4 | 4 | 3.7 |
| Communication range (m) | 20 | 14 | 11.4 | 9.8 | 8.8 | 8 | 7.4 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Q.; Fok, M.P. A Two-Phase Coverage-Enhancing Algorithm for Hybrid Wireless Sensor Networks. Sensors 2017, 17, 117. https://doi.org/10.3390/s17010117
Zhang Q, Fok MP. A Two-Phase Coverage-Enhancing Algorithm for Hybrid Wireless Sensor Networks. Sensors. 2017; 17(1):117. https://doi.org/10.3390/s17010117
Chicago/Turabian StyleZhang, Qingguo, and Mable P. Fok. 2017. "A Two-Phase Coverage-Enhancing Algorithm for Hybrid Wireless Sensor Networks" Sensors 17, no. 1: 117. https://doi.org/10.3390/s17010117
APA StyleZhang, Q., & Fok, M. P. (2017). A Two-Phase Coverage-Enhancing Algorithm for Hybrid Wireless Sensor Networks. Sensors, 17(1), 117. https://doi.org/10.3390/s17010117