1. Introduction
In modern robotics, there is an important need to develop robotic technologies to solve real problems in numerous fields. An increasing number of tasks are tied to detecting sources of infra-red (IR) thermal images to accomplish different kinds of autonomous missions. The IR thermal images provide useful intensity data, either in dark or enlighten scenarios which are adequate for robots that carry out a diversity of tasks such as firefighting, autonomous navigation with IR bands, surveillance, search and rescue, underwater missions, volcanic exploration, mining, space exploration, industrial welding, and so forth. An active visual sensor radiates the environment with a form of energy, and the sensor’s receiver detects the energy reflection. Contrastingly, a passive visual sensor solely measures the existing environmental energy (i.e., light intensity). Although commonly passive visual sensors detect visible bands, there is also a number of sensors that detect the IR electromagnetic spectrum, which is an invisible band. These sensors are commonly known as forward-looking IR sensors. These devices are considered thermal IR sensors because they operate in the thermal IR portion of the electromagnetic spectrum, scoping mid-wave ( nm– nm) and long-wave ( nm– nm) radiant energy sensitive. However, such sensor devices are very costly in the available technological market. In this work, we present the searching/finding problem of an IR thermal radiation source with specific heat range at an unknown location. The robot solely depends on three basic inputs: low-quality and low-resolution IR thermal images, the wheels’ instantaneous rolling speeds, and RGB-D data mapping the obstacles. Therefore, the purpose is to formulate an autonomous searching model for the robot to find a heat source using IR images as feed back.
Among a diversity of applications, there are robotic systems purposed to accomplish tasks where IR thermal sources detection is implicated. The use of IR thermal images in robotic perception is related to carrying out countless missions for detection, inspection, navigation, tracking, localization, and so forth. There exist patrolling autonomous robotic systems purposed to inspect pipelines in thermal power plants for early detection and prevention of leakages [
1]. Likewise, robots are instrumented with firefighting monitor systems to extinguish fires in road/railway tunnels [
2]. A robotic system for industrial spray deposition that provided self-control to the robot’s course over surfaces with thermal variations was introduced in [
3]. In the automotive manufacturing process of radiative paint curing, robot manipulators are based on feed back from UV LEDs detecting heat sources, and an IR thermal camera that measures heat signatures [
4]. Fusion algorithms detect fire sources by a micro-car, combining light and temperature sensors on board for tracking gradients of light and heat [
5]. Such a work, was designed with an inherent sinusoidal movement to scope
of sight to enhance the limited sensors’ field of view. The work presented experiments in a small area, and proved heuristic confidence levels and conditional probabilistic values as votes to steer the robot.
Unlike previously cited works, we present a robotic planner purposed for exploration missions, which is combined with the IR observations, and directional derivatives for control. Our approach presents results on IR image segmentation, characterization for sensor modeling, numerical analysis with controlled robot’s velocity/acceleration components, and results of the robot’s exploring paths.
Some works reported evaluation of commercial sensors, and IR imaging for data characterization. For instance, in [
6] a set of commercial passive sensors was evaluated to determine strengths and weaknesses applied to imaging regions for mud detection. In [
7], analysis and preprocessing of thermal–physical features extracted from passive thermal objects were reported. Unlike our approach, we set up a low-cost IR camera, and deduced its measurement models as exact solutions. And, in order to avoid algorithmic complexity, the sensor models provided raw measurement of distance, heat, and pixel intensities.
Several works on tracking and identification using different thermal sensing approaches were reported, for instance, using binocular stereopsis with thermal cameras [
8], intense imaging techniques for thermal regions: filtering, segmentation, centroid tracking, morphological operations and edge detection [
9], combining an IR thermal camera with a visible band color camera [
10], and combining a Kinect’s vision and depth data with a thermopile array sensor [
11]. As a difference in our work, we proposed a passive IR visual system that is not combined with another visual technological device, but a simple photographic film. Instead of increasing technological devices, the optical system was characterized to measure 3D positions directly by deducing exponential and polynomial sensing models. Neither, intensive imaging processing, nor matching and optimization techniques, are required. In addition, rather than target-tracking, our system explores and finds thermal targets that are not necessarily present in the field of view. Detection of thermal reflections over objects around is enough to successively find the IR source.
Another major issue developed in this manuscript is the search/explore planner system. For a general survey on robot planning techniques, see [
12,
13]. Some works have been reported on target-reaching [
14], where a micro-car equipped with a photo-transistor is deployed to reach a light in a small arena. Such a work demonstrated results by cumulative probability imaging, and the robot’s path was tracked by using an overhead camera.
The work [
15] presented a topological and statistical corridors exploring system using sonar sensors. As a result, the work presented interconnected nodes detected by the ratio of PCA’s eigenvalues, which is an appearance-based method. It was combined with the circle waypoint, which is a path-following method for navigation planning.
In addition, a fuzzy-based target-tracking framework was presented in [
16], where a rolling robot used RGB-D depth imaging data for navigation and target-following. It presented empirical results of the RG chromatic space for color identification. And introduced the fuzzy-rules engine to set the kinematic robot’s variables for obstacle avoidance and following a target. Unlike such works, our problem solution does not consider neither, heuristic techniques, nor knowledge in advance of the target to be found. Instead, in order to find the target, a pair of nonlinear equations connects the robot’s positions and the unknown target. Once the system is recursively solved, its solution provides the next local planning. Thereby, our control approach states trigonometric partial differential equations for the robot to avoid the obstacles and reach the IR source.
Furthermore, there are reported works relevant to our specific research in the field of navigation control. For instance, perception-planning using coupled layers for navigation was reported in [
17]. Navigation systems comprised of high and low level layers [
18], and multi-layered robotic systems [
19]. These approaches are designed as architectural software organization, mainly featured by being either global planners, or path generators a priori. Thus, the target position knowledge must be known in advance. Rather, as a main difference, our work approaches a physics-based planner comprised of a system of nonlinear equations solved online and recursively estimating local solutions. Apart of the proposed sensing model, and the planner system, there is a controller that exerts longitudinal and lateral navigation control.
The navigation control strategy provides the robot’s ability to avoid obstacles as it gradually reaches the thermal source. Some traditional approaches are compared in [
20]. We can mention the traditional inverse quadratic potential fields combined with state estimation [
21], and approaches on time-varying potential fields [
22,
23]. In addition, other methods are the vector fields techniques using continuous nonlinear functions such as sigmoid [
24], exponential [
25], trajectories with harmonics [
26], polynomial-type to reduce instability and [
27], compound adapted trigonometric [
28], and steering methods without depth data, but using visual angles [
29].
Just for the case of the planner, this part is an incremental contribution of this work. Unlike previous approaches, we span two simple and fast trigonometric functions (sine and cosine) through the gradient operator to geometrically influence two dimensions. We also preserve mathematical simplicity and low computational cost for real-time robotic missions. The proposed navigation function is expressed as a control law that involves the distance obtained by the planner, and the distances measured from the obstacles around, once combined, exert repulsive and attractive behaviors. A similar planner was reported in [
30], but solved analytically and combined with exponential vector fields. Such research was applied to find buried pipelines by measuring electrochemical signals on the ground tied to extreme electrical disturbances and steer chattering. Unlike that work, in this paper we provide a faster, computationally simpler solution for the planner through numerical successive approximations spending less than 10 iterations per loop, and numerical precision of
.
Finally, deploying the RGB-D for obstacle sensing, the work [
31] presented a comprehensive review of recent Kinect-based computer vision algorithms and applications, including preprocessing, tracking and recognition, and 3D mapping. Similar works are reported in [
32], where Kinect depth data for indoor mapping applications with high-resolution accuracy was developed. In [
33], GPU-based algorithms for real-time RGBD data filtering were implemented. In [
34], robot navigation and localization using depth camera was implemented. As a difference in our work, a highly discriminative algorithm for 3D spatial filtering was developed. Local maps are comprised of low density data, which are constrained by a repulsive activation distance. Instead of registering 3D maps, data are computed and organized in the form of 2D LiDAR-like maps, and used to exert vector fields at low computational cost.
The searching problem is tackled by developing three issues: a low-cost home-made thermal IR visual sensor, its IR sensitivity characterization, and formulating its sensing exact solution from sensor measurements. A subtle sensing model calibrates an inexpensive home-made IR visual sensor that infers distance and temperature from an intensity image. The sensing model was formulated with direct and inverse solutions to correlate both the distance and temperature of a heat source. Furthermore, a system of nonlinear equations establishes a search and explore robot’s plan that provides estimations of the source location. The planner equations obtains adjustments based on feed back from the distance-temperature sensor’s observations. The planning equations represent a deterministic system that leads the robot to find the heat radiation source by successive approximations. Nevertheless, we additionally proposed to control the robot by formulating simple but effective trigonometric directional derivatives for navigation control. The planner equations are combined with 2D partial differential equations to produce repulsive and attractive vector fields. Thereby, the robot simultaneously avoid obstacles and find the source of heat emission. This research contributes three major issues listed in ascendant order of importance:
An IR visual sensing model that can be applied to any low-cost passive camera. And, it may be adopted as a generalized methodology for different search robotic missions.
A local planning model is designed to explore and search goals at unknown locations. The planner is comprised of a time-variant system of nonlinear equations, solved online by a Newton-based method.
A navigation controller that is different from other approaches; it is simple, fast, and employs real-time purpose-effective trigonometric functions. The function sine (attractive), and the cosine (repulsive) were formulated as directional derivatives where the angle range is transformed into territorial distances.
The paper is organized in the following sections.
Section 2 discusses the vision algorithm with adaptive threshold to detect heat emissions regions.
Section 3 formulates a sensing model to measure distance from IR intensity images.
Section 4 deduces the sensor model closed-form.
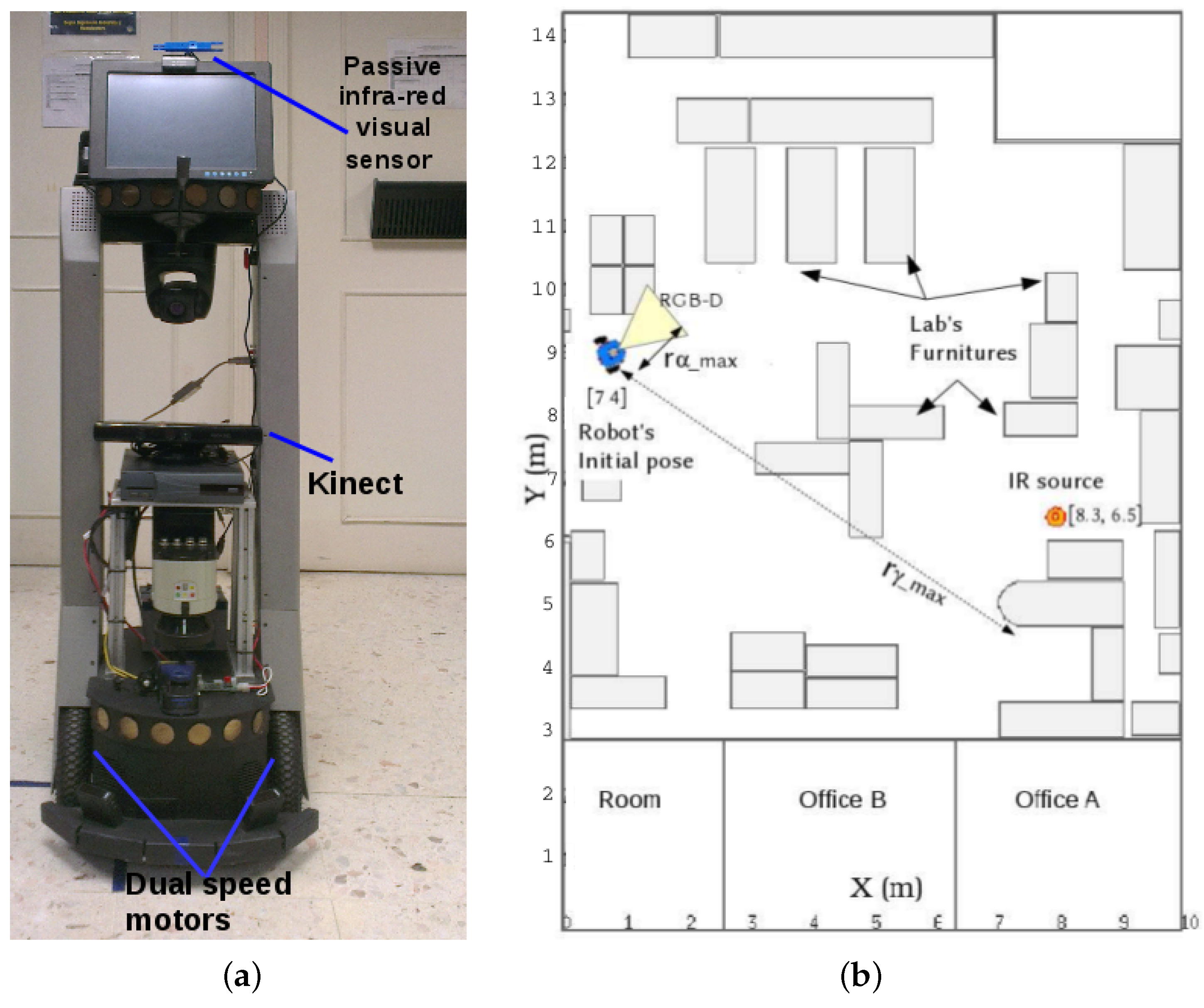
Section 5 introduces the experimental robot’s scenario.
Section 6 establishes a planning system to find the Cartesian location of the heat emissions.
Section 7 formulates two trigonometric-based partial differential equations to describe repulsive and attractive behaviors.
Section 8 establishes a control navigation function to autonomously reach the IR source.
Section 9 discusses the experimental navigational task results. Finally, the conclusions are provided.
2. 2D Infra-Red Image Model
This section describes the IR visual sensor construction, the image measurement procedure, and the heat regions detection. The home-made sensor device was built with the functionality of an infra-red camera at the lowest possible cost. An ordinary USB camera was modified to capture images in the near/mid infra-red wavelength, with a suitable sized piece of black photographic negative. We researched seven different types of thin sheets of light-sensitive materials to find the best filter for our purpose. We unscrewed the lens assembly from the camera PCB, and removed the small piece of glass used to reflect red light on the back of the lens. Then, we fitted the photographic negative piece between the lens and the CCD. We placed either heat objects or infra-red LEDs and the visual sensor was capable of seeing near infra-red radiation. Other objects of the scene in the normal wavelengths of human vision were not visible because they were all filtered out, except for some red lights at the very red end of the spectrum. The optical features of the photographic film and camera lens are unknown. Thus, different experiments for acquiring images were carried out, ranging from different temperatures between
C and
C.
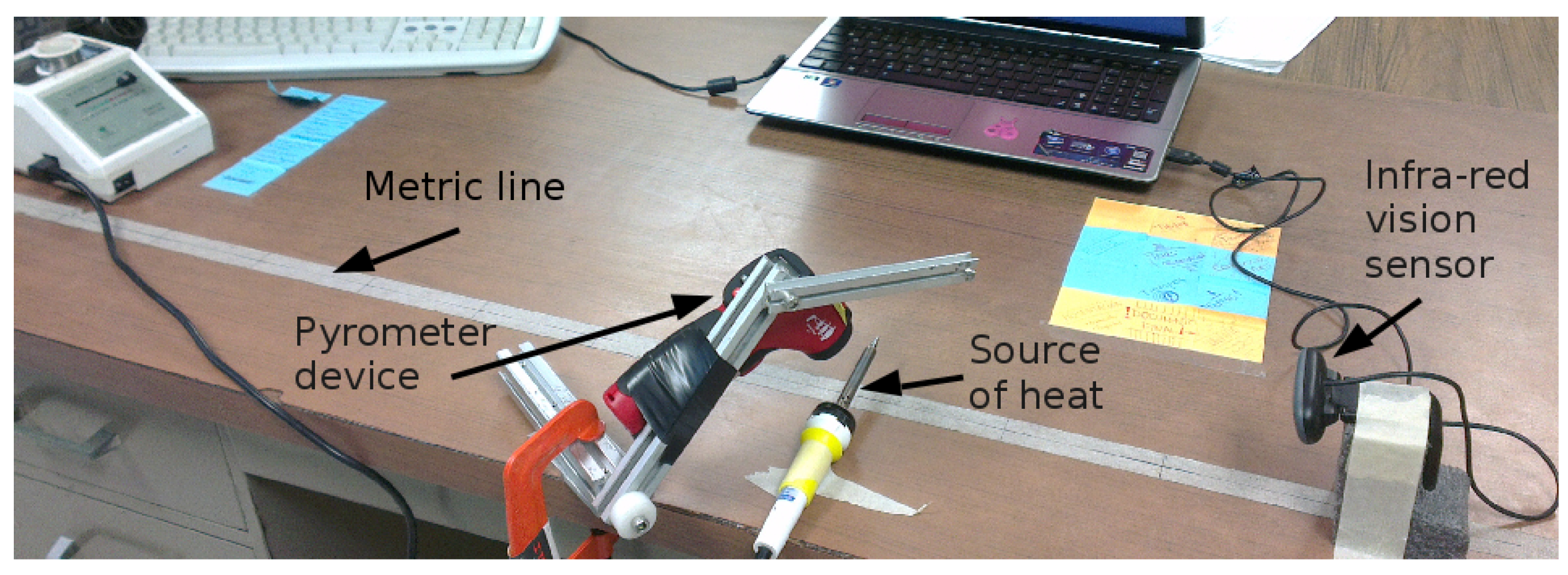
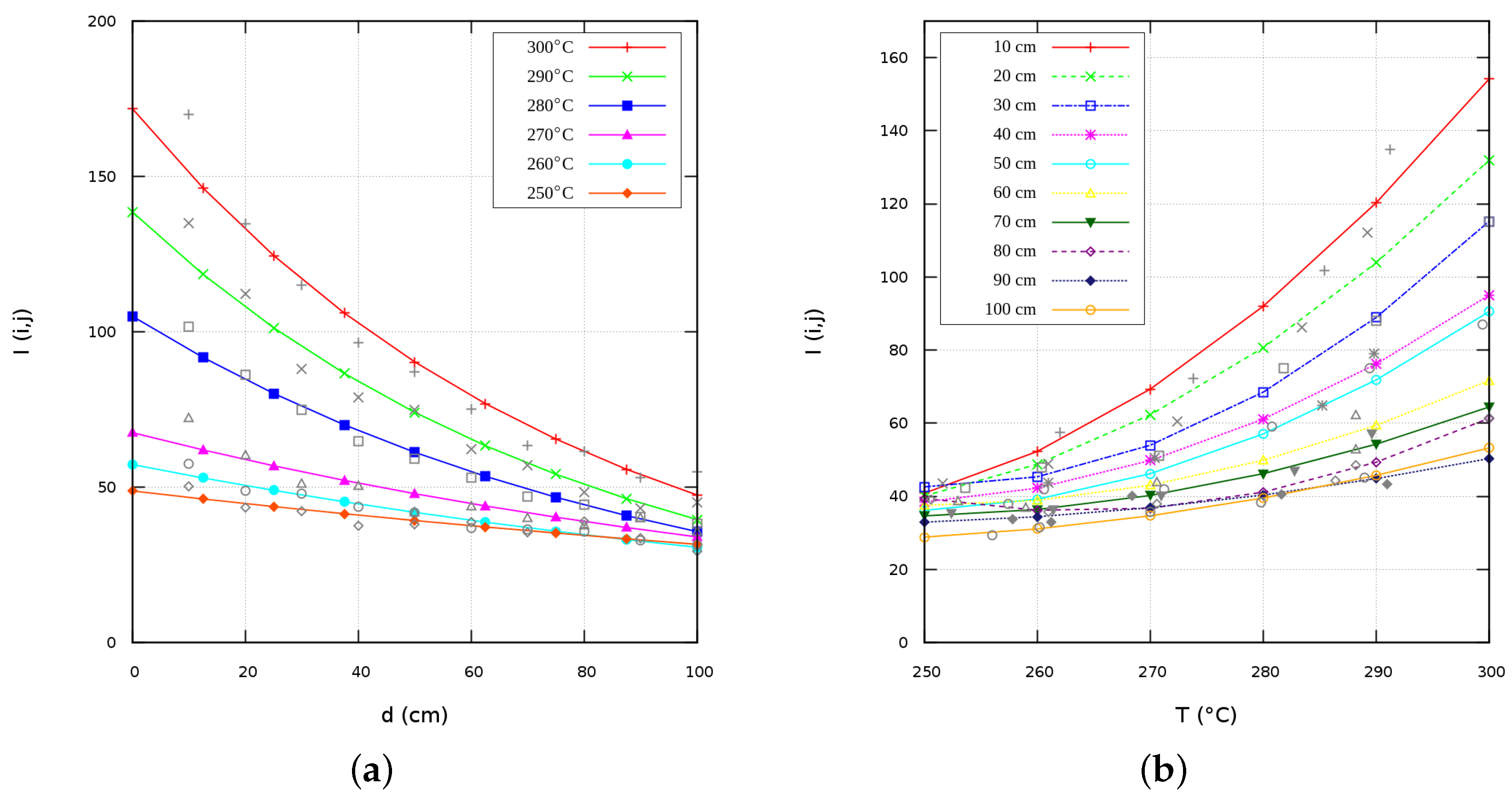
Figure 1 depicts the IR sensor characterization, which consisted of determining a mathematical relationship among the pixel intensities
, the object’s temperatures
T (
C), and its distance
d (m).
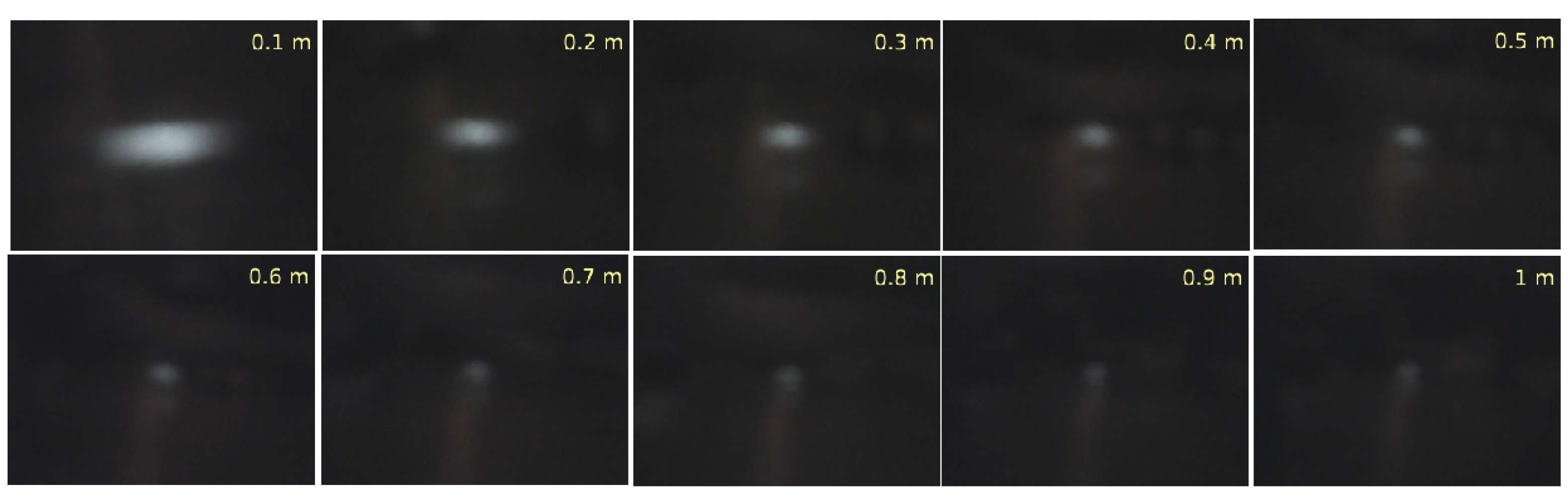
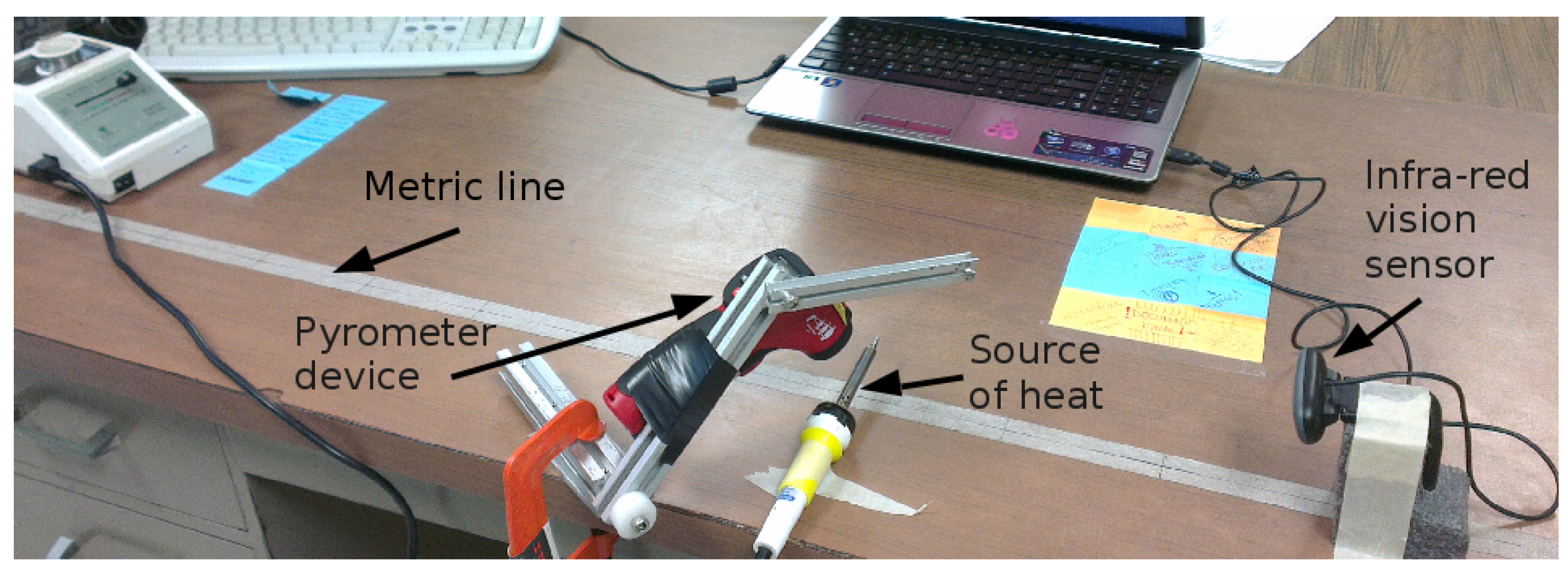
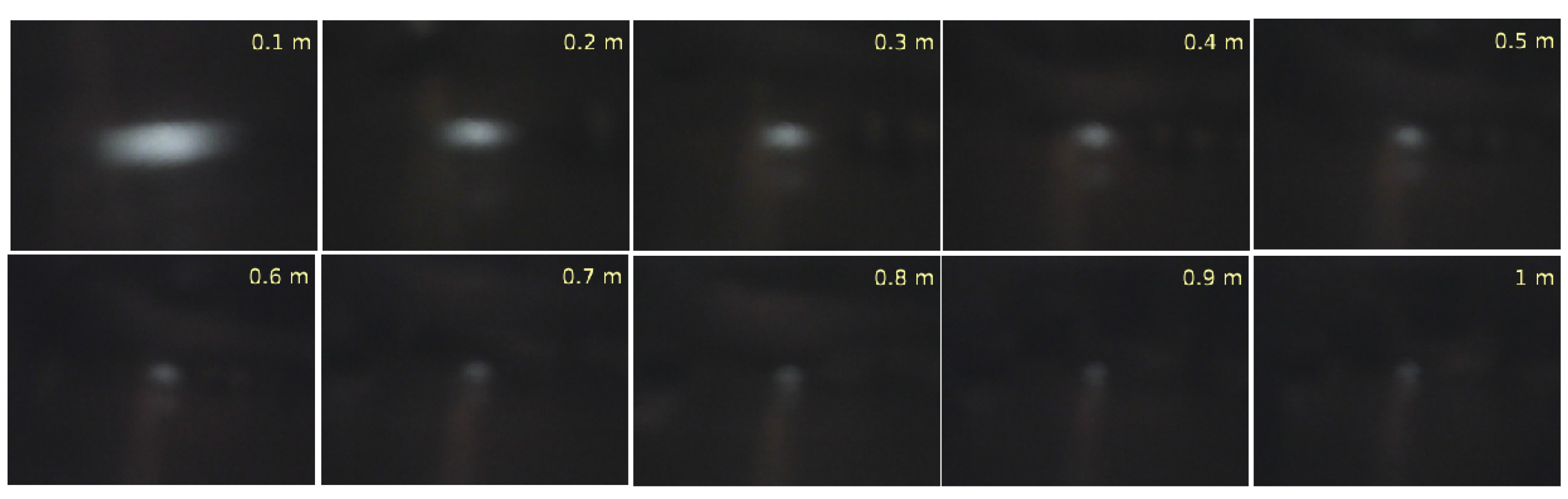
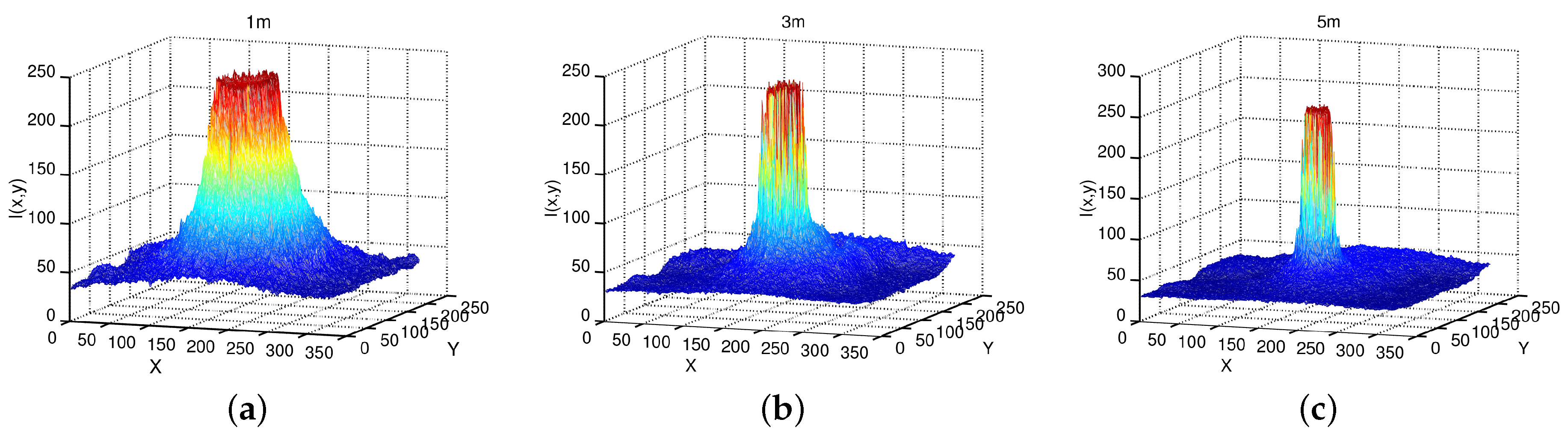
A high temperature radiation object (soldering iron) was placed at known distances with millimeter precision, and with known real temperatures externally measured with a highly precise pyrometer device. An illustrative set of IR images in RGB scale is shown in
Figure 2, where the heat radiation source (soldering iron) set at ∼
C was placed at successive displacements of 0.1 m.
Figure 2 shows IR raw images, where as far as the heat sources move farther, a nonlinear decay of the pixels intensity w.r.t. the source of heat occurred. To search and find a heat source, only a pixel within a region of interest in the image is required. An adaptive threshold value is calculated by statistically ranging the top
of pixel intensities (hottest regions).
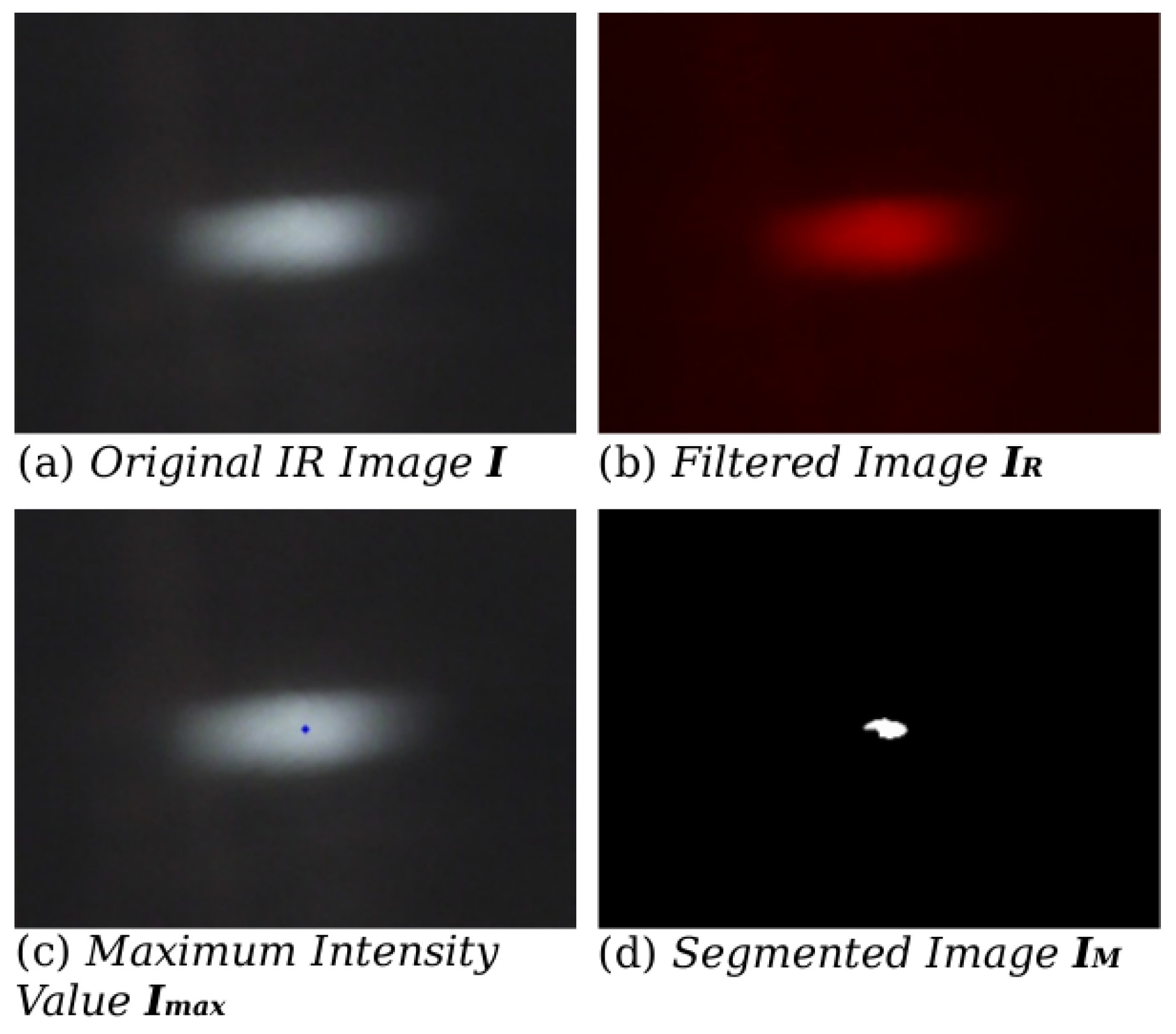
Let us define
as the raw IR image physically filtered by the photographic film, such that
, in the 3-color channels RGB as depicted in
Figure 3a. Electromagnetic radiation with wave lengths in the range of 5000 nm–5600 nm fall in the near IR spectrum. The raw RGB image
is filtered out by discriminating the green and blue channels to obtain solely the red channel
. The near IR wavelength is closer to the red wavelength and it mostly contains the objects’ heat emission of interest
Figure 3b. Thus,
Now, with
, our interest is to detect values of emitted temperatures defined at
C. For the sake of a segmentation process in
, the argument
that maximizes the intensities in
is obtained by (see
Figure 3c):
The argument
establishes a boundary value of temperatures of interest. Thus, a top factor
rate beneath
is defined, as well as the least boundary by
:
Hence, is the inferior limit for a segmentation function to detect the pixels representing temperatures of interest. The following definition is expressed:
Definition 1 (Intensity Region of Interest). The IR image contains a segmented region that represents the temperatures of interest:
Figure 3d illustrates a segmented region obtained by Equation (
4) that ranges the top
of pixel surrounding
C.
Values obtained by the IR visual sensor were validated by Wein’s law in order to classify the IR sensor sensitive capability and its wave lengths filtering range. The process started from the Planck’s Law describing the intensity radiation per unit area of a source emission. The spectral radiation function
with physical units W/cm
sr of a black body for a specific wavelength
λ, and temperature
T is defined by
where
(W
m
/cm
sr), and
(
mK). It follows that, the Wien’s law of displacement states that the maximum value of
λ that causes the peaks curve of the radiation power of a black body, is inversely proportional to its temperature [
35].
where the constant of displacement of Wien
m·K, and
T is the temperature (
K).
Table 1 shows the empirical model of the home-made IR sensor. Data were obtained by the experimental measurements of
T using a Pyrometer device, the Wien’s Law to calculate
λ, and the vision algorithm to obtain
using Equations (
1)–(
4).
In addition,
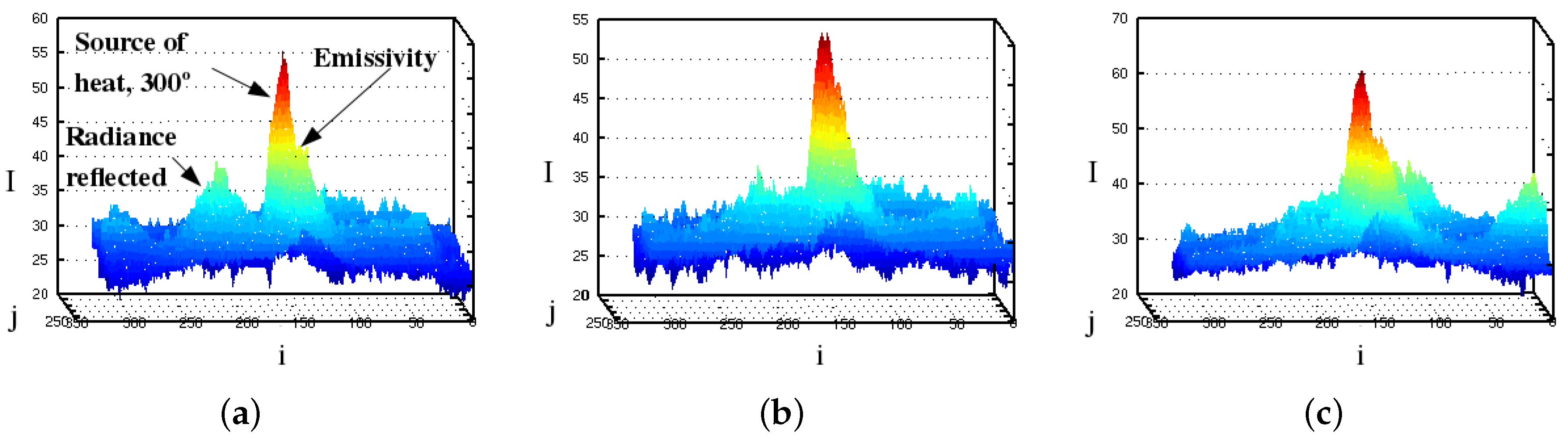
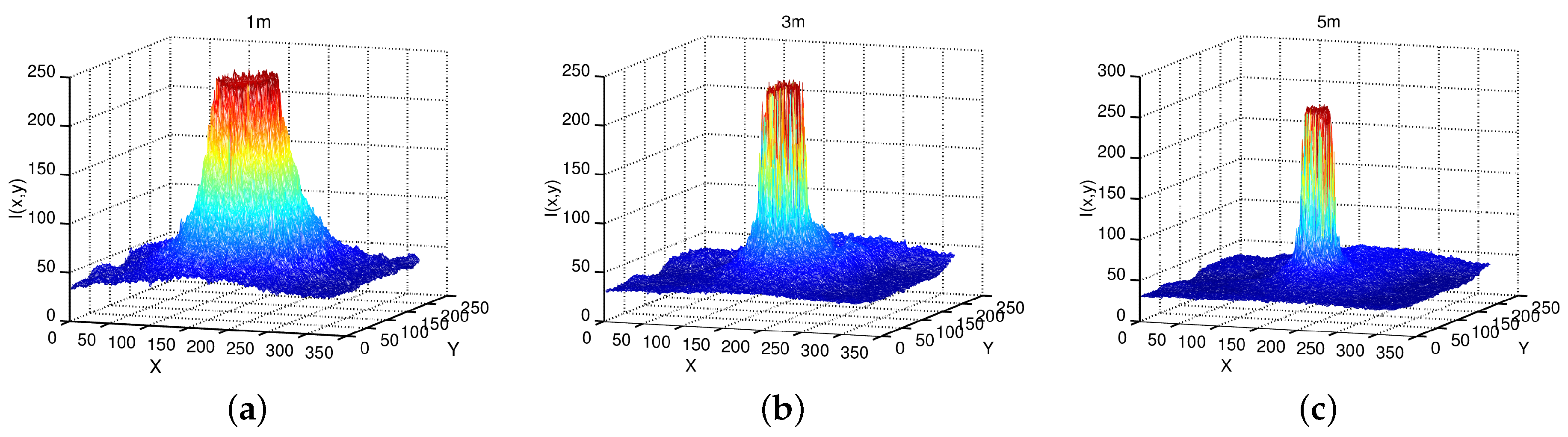
Table 1 empirical values are consistent with the conventional scale of the near IR frequency spectrum and associated temperatures. The IR emissions of
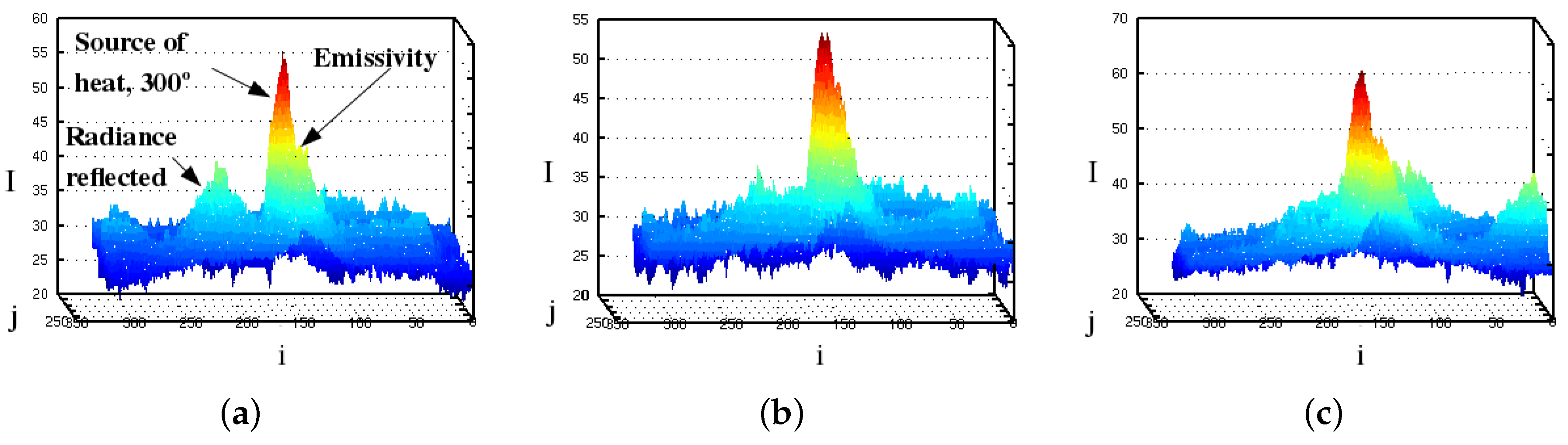
Figure 2 (soldering iron) are plotted too as meshes at three different distances by
Figure 4. The differences in wave lengths, emissivity, material types, and emission power are all inherently added in the pixel intensity. Some pixels measured both directly from the radiant flux emitted by the source, and surface radiance reflexivity. In
Figure 4, columns (
i) and rows (
j) are plotted versus pixels intensities
. The highest peak (red color) contains the intensity pixels bounding to the body’s surface. The proportion of thermal radiation emitted by the object’s surface due to its temperature is known as emissivity. The IR radiance emissivity region is reflected on near surfaces and detected by the sensor.
4. Nonlinear Sensing Model Exact Solution
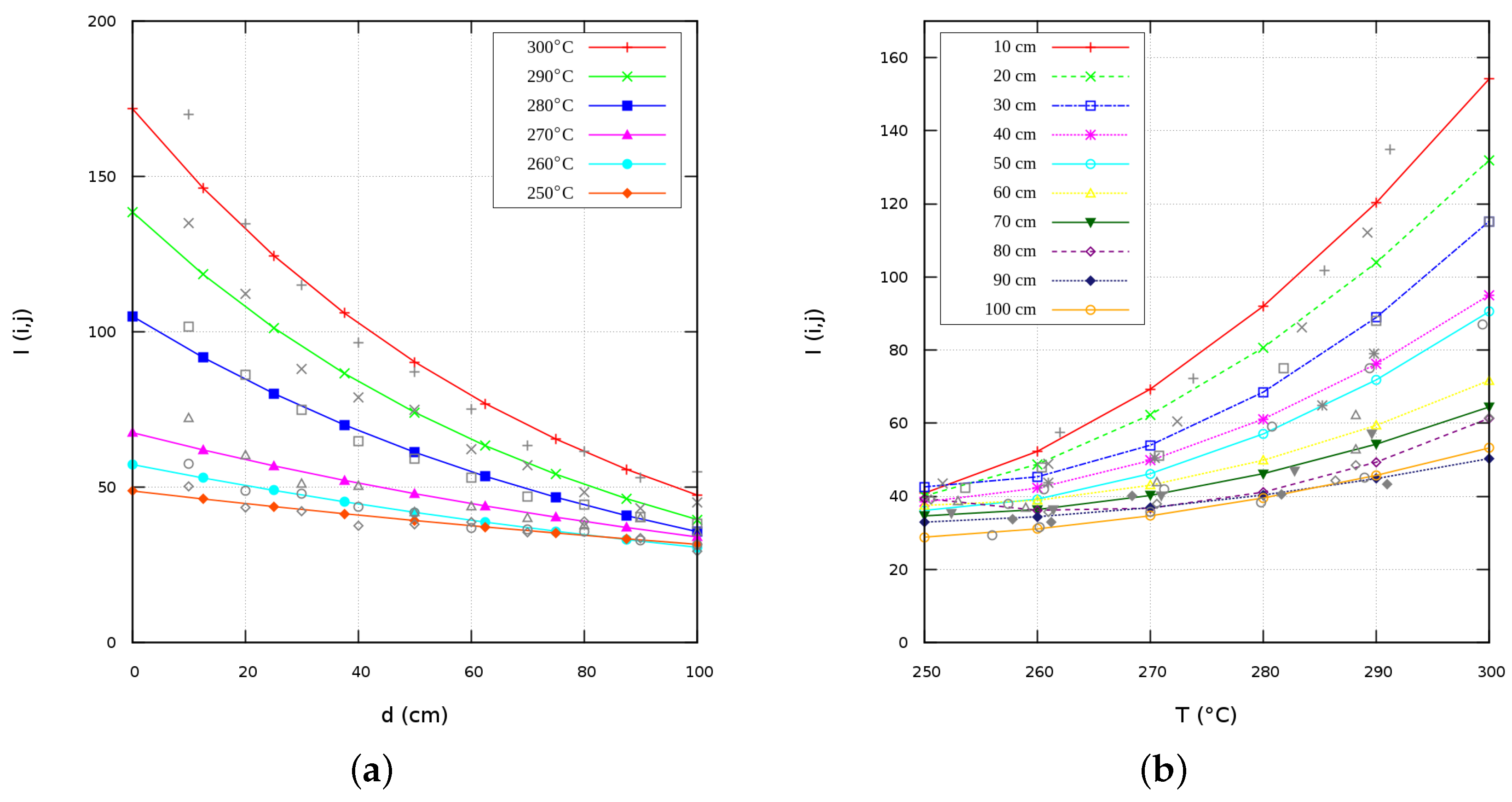
Mathematical functions fitting the range of the sensor data (
Figure 5) are suitable forms to further the analysis in order to deduce new exact solutions. A closed-form function constrained by the variables
T and
d is deduced, both terms are deployed to infer a new analytical direct/inverse solution. Initially, let us consider both previous decoupled sensing models:
and
Since both models have
redundantly, then drop-off
in both equations:
and
and by equating both resulting equations, variables
d and
T are expressed mutually as functions of each other:
and raised to the second power:
we substitute constant terms by
A in order to simplify the algebraic process (where
β prevails constant for an arbitrary temperature):
and it follows that:
thus,
is obtained and defined by:
Finally, by replacing A, the sensing model is provided in the next proposition,
Proposition 3 (Temperature as a Function of Distance). The temperature T is obtained by the family of distances d as functions of intensity values . Conversely, to find its inverse solution
, we obtain
d that depends upon
T, starting from Equation (
18). Thus, multiplying both sides of equation by
β’:
and applying the exponential product to both sides of the previous equation:
The distance d is defined by the next proposition,
Proposition 4 (Distance as a Function of Temperature). The distance d is obtained by the family of temperatures T in terms of intensity values . In the form provided by the authors, these sensing models work for a specific curve. Notice that a fitted curve model behaves according to the sensor being characterized, and such a model implicitly includes all effects of temperature values and distance, material emissivity and so forth. For the specific case presented in this work, if the photographic film is replaced by another material, then the polynomial and exponential coefficients obtained from mathematical regressions have to be re-calculated.
Furthermore, the real measured distance
of the thermal source w.r.t. the robot’s sensor is enough information to infer the thermal source in 3D space coordinates
. The model is obtained through spherical coordinates by:
where the azimuth angle
, and the elevation angle
w.r.t. the center of the IR-camera location are defined by:
where
C and
R are the image plane number of columns and rows respectively. Likewise,
, and
are the pixel coordinates of the centroid that maximizes the heat region.
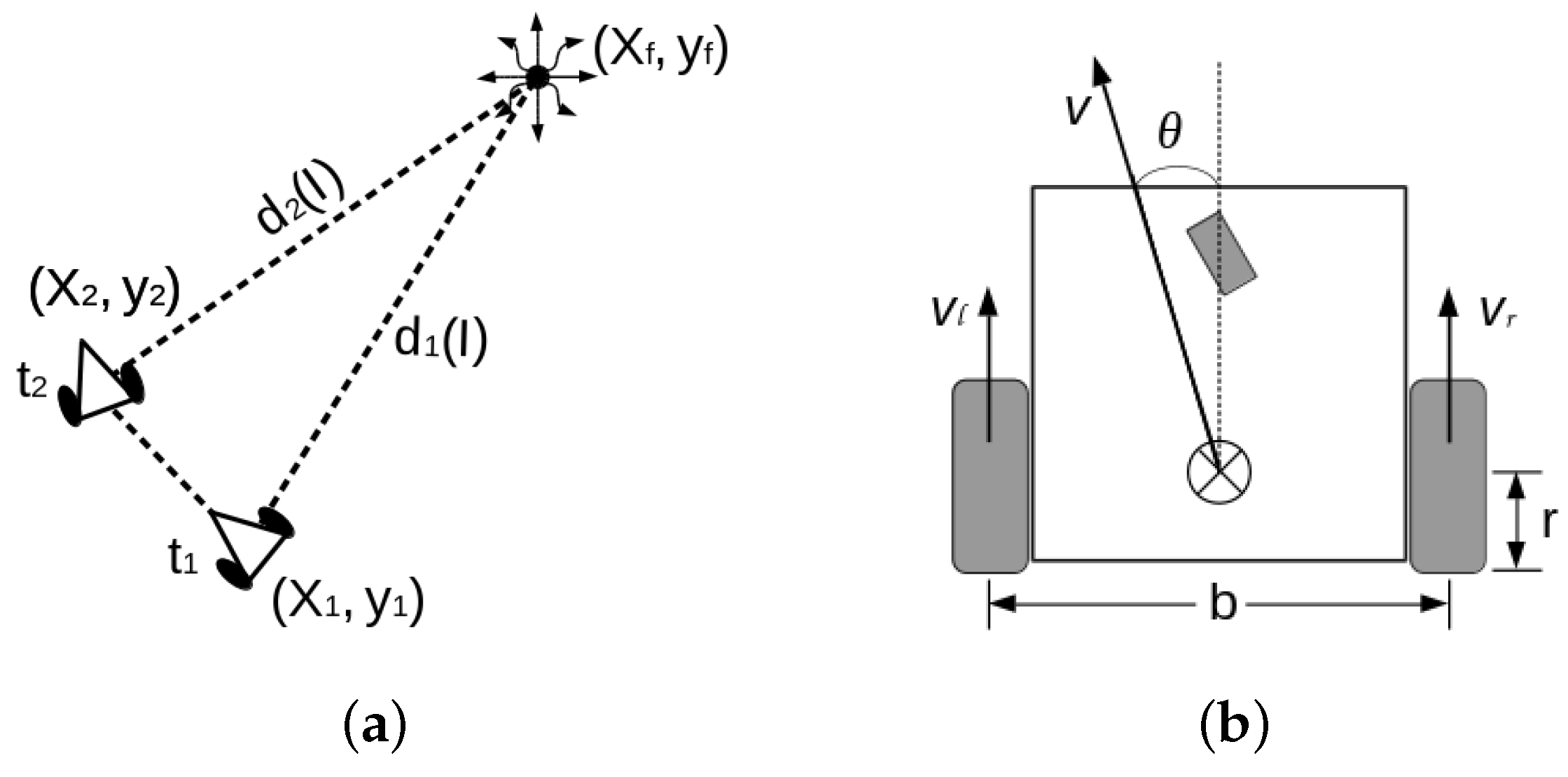
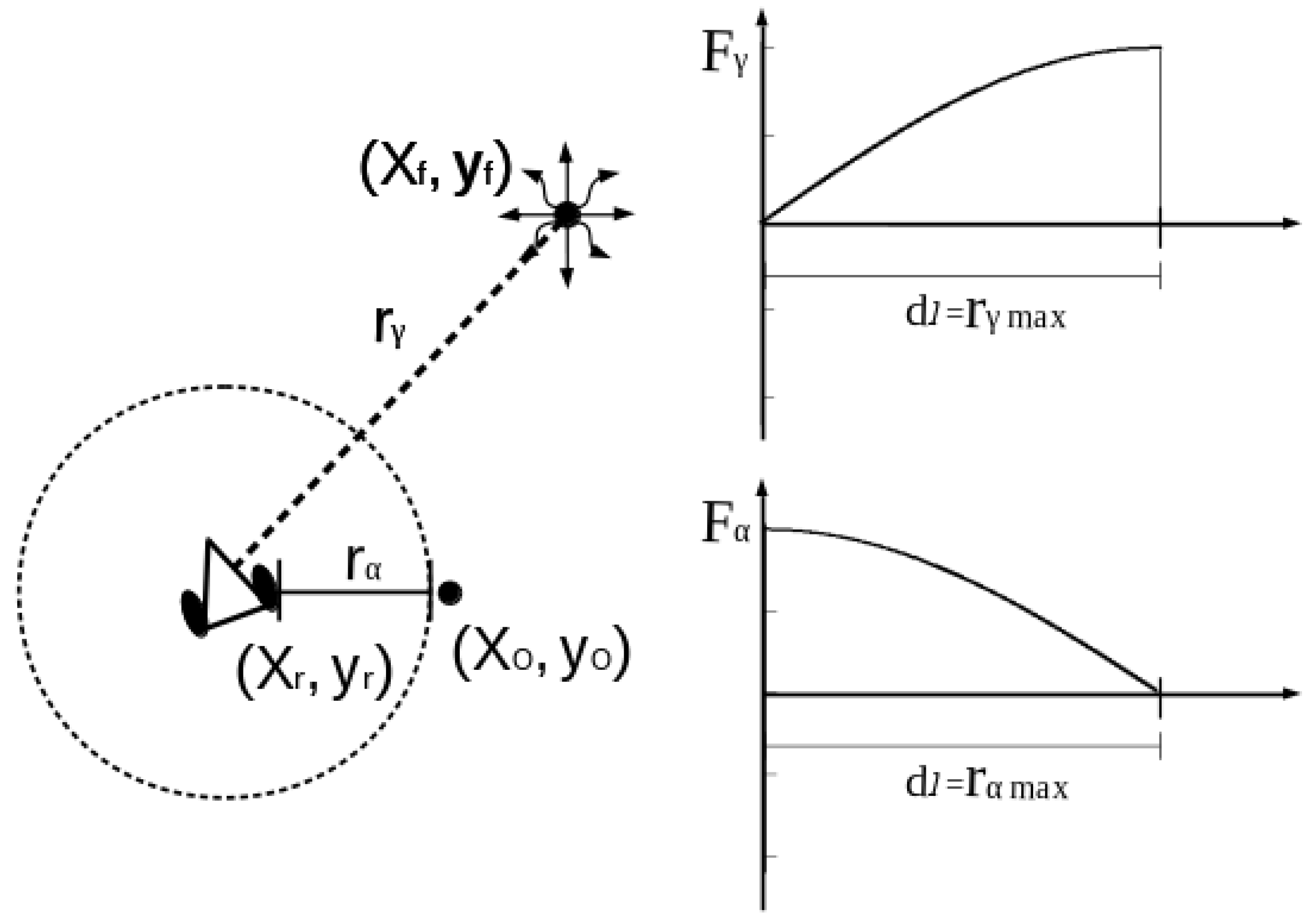
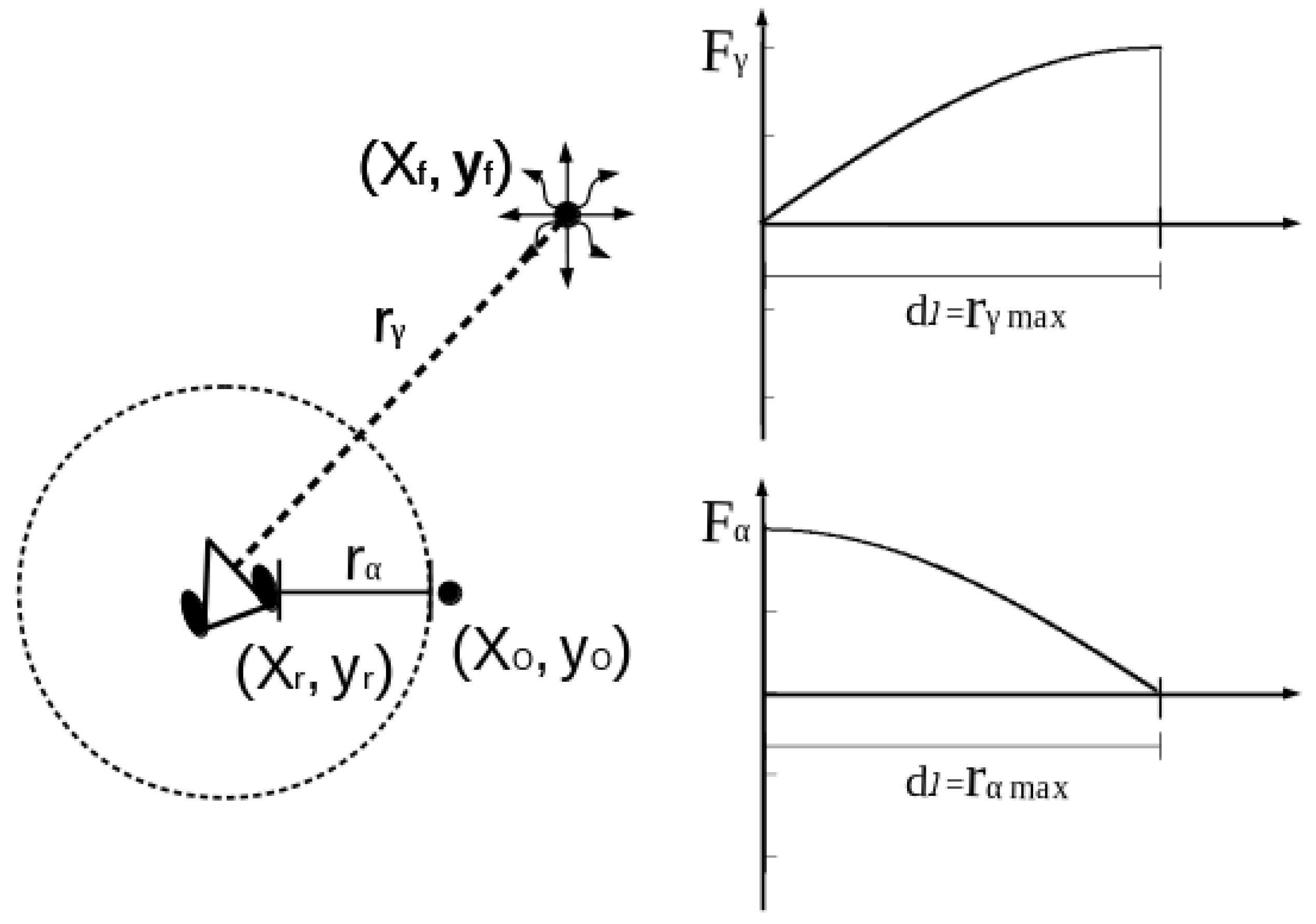
6. Planning Equations for IR-Source Searching
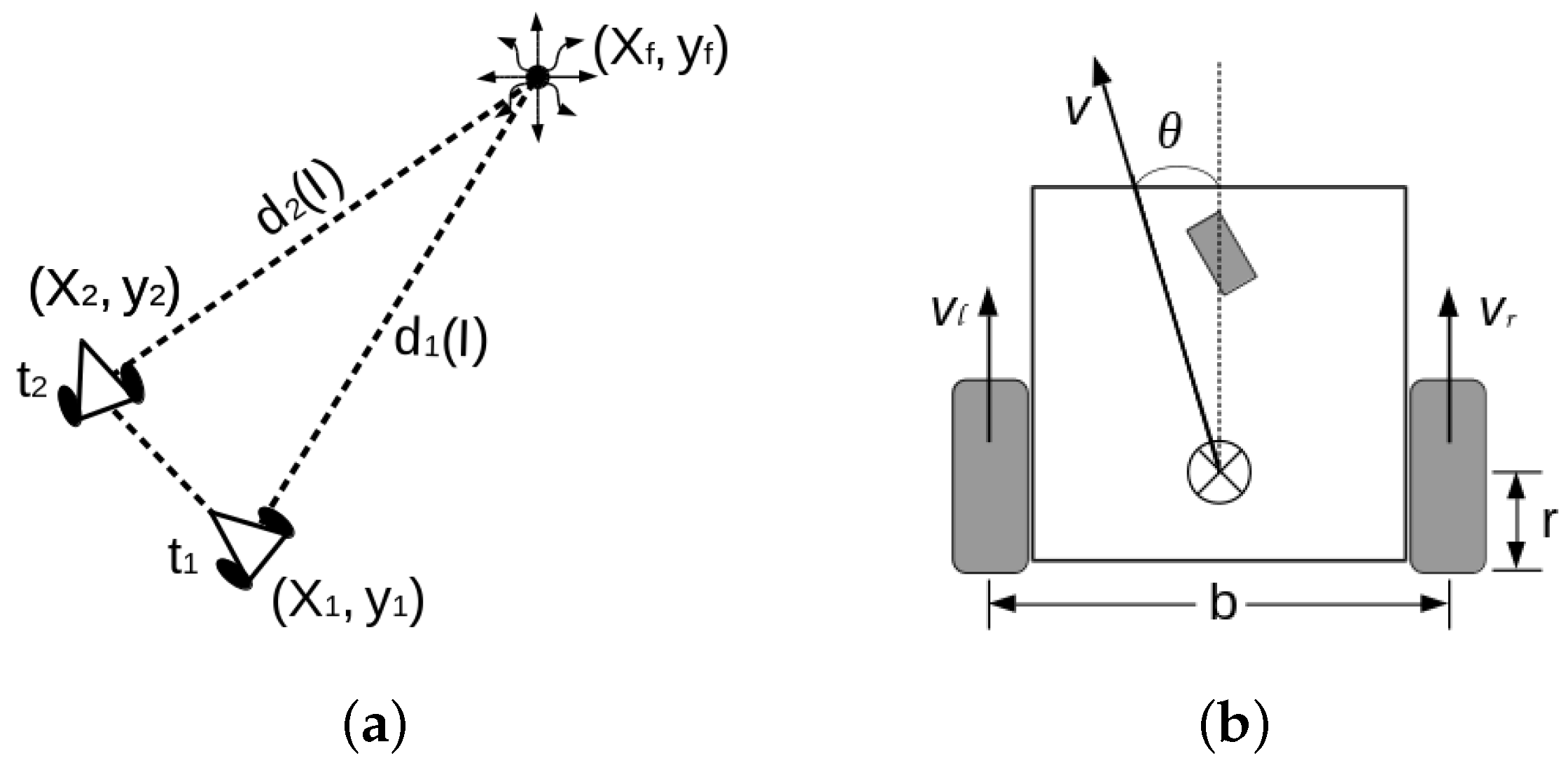
Let us assume that two successive positions
and
are known. And a final value
) is to be estimated, see please planning and robot kinematic parameters of
Figure 8. The robot passes through
and
in a finite period of time
, measuring
and
(Equation (
25)) at each position respectively.
The search/find planning scheme is established by the next general equation, which is established according to
Figure 8a. All coordinates deployed in the planning framework are managed in global coordinates. Nevertheless, the observation distances
are sensed in the robot’s fixed frame.
Therefore, Equation (
28) is spanned by the next axiom into a system of two independent equations that describe the exploring motion.
Axiom 1 (System of Nonlinear Equations). Redefining ; in time the expression is established by:and in time the expression is stated by: If more robot’s positions are used, the number of equations or constraints increase. Hence, the system will become overdetermined and more equations will constraint the two unknowns (degrees of freedom) of the system. Although, for this specific case it is possible to deduce an analytical solution, we proposed a numerical recursive successive approximation method. Both, analytical and numerical calculations have been proved, and we conclude that the numerical modality is faster and more feasible for online implementations. Therefore,
and
are solved by the multivariate version of the Newton-Raphson method stated by the next equation:
separating the vector components into two equations:
and
Therefore, our purpose is to iteratively reach a zero value for each prediction function
and
, as they are the real roots. Thus,
and
By reorganizing algebraically:
In its matrix form,
, and
,
the next Cartesian components calculation is provided by:
where the Jacobian matrix is defined by:
likewise, its inverse solution is stated by:
By substituting the Jacobian to predict the next Cartesian components:
The determinant of the Jacobian matrix is obtained in the following manner:
algebraically developing, simplifying, and reorganizing:
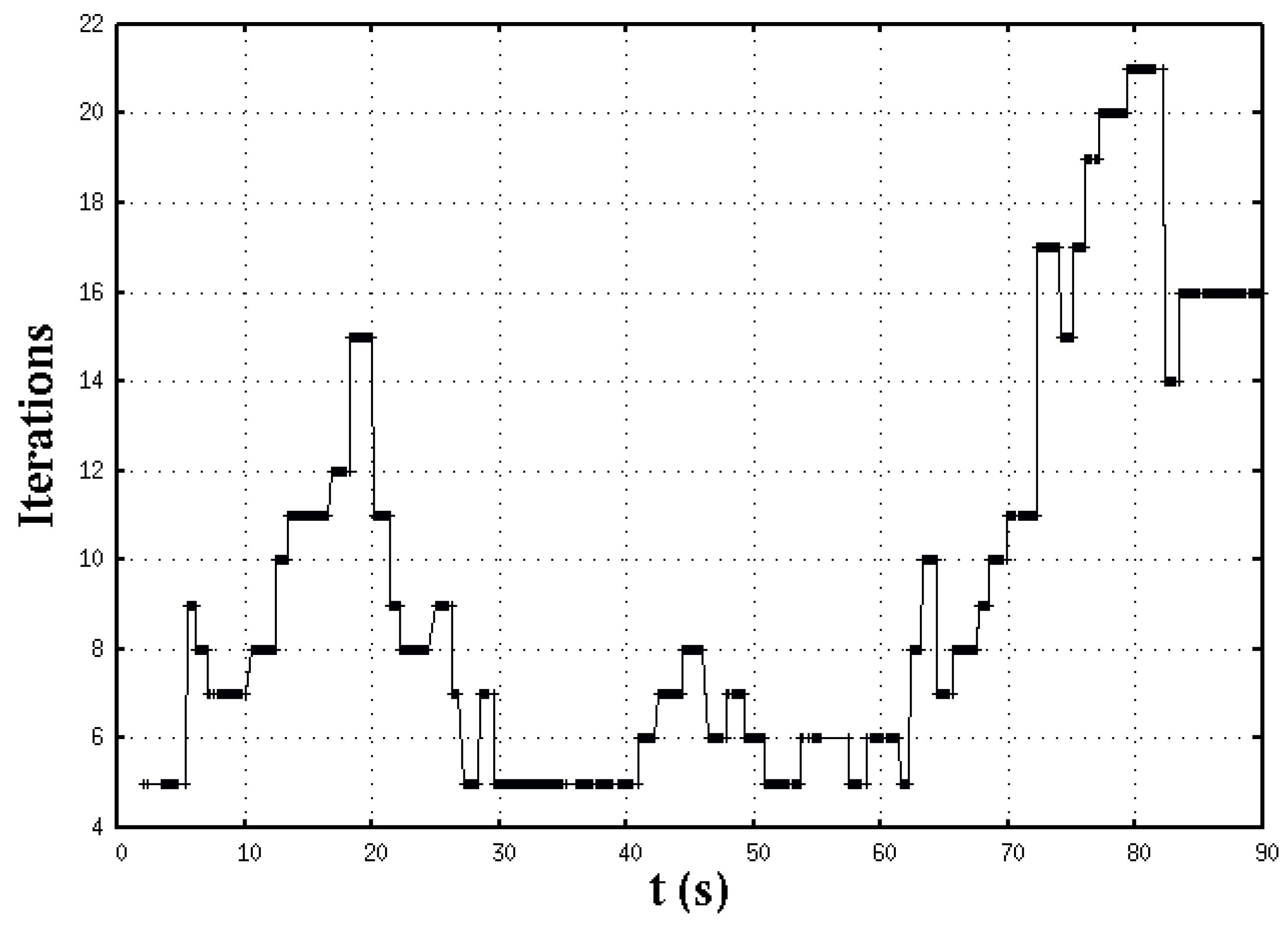
Proposition 5. (Nonlinear Planning Solution) The solution for is recursively estimated by:and In its recursive process, the coordinates are expected to gradually reach the value . Being the best numerical approximated estimation of the thermal source position. Therefore, the following remark is stated:
Remark 1 (Convergence Criterion). The condition criterion for sufficient convergence is defined by the next inequalities expression: During experimental navigation, the nonlinear planning system is solved online with a number of iterations per control loop as the behavior depicted in
Figure 9.
8. Control Navigation Function
Previous
Section 3 (IR nonlinear sensing model),
Section 6 (motion planning model), and
Section 7 (trigonometric directional derivatives) treated three main topics separately. Now, this section mathematically combines them in order to develop a control law that produces autonomous navigational missions for searching and exploring. According to the planning and directional derivative control schemes, robot’s posture is not relevant for our navigational framework. The vector field is organized by either first or second order derivatives, hence robot’s encoders are deployed to measure wheels’ rotational velocities. The encoder measurement model detects
pulses with resolution of
R pulses/rev for wheels of radius
r, and it is stated by:
The direct wheels measurement provides angular instantaneous motion
, and in terms of its first numeric derivative (central divided differences) [
37], the following proposition is stated.
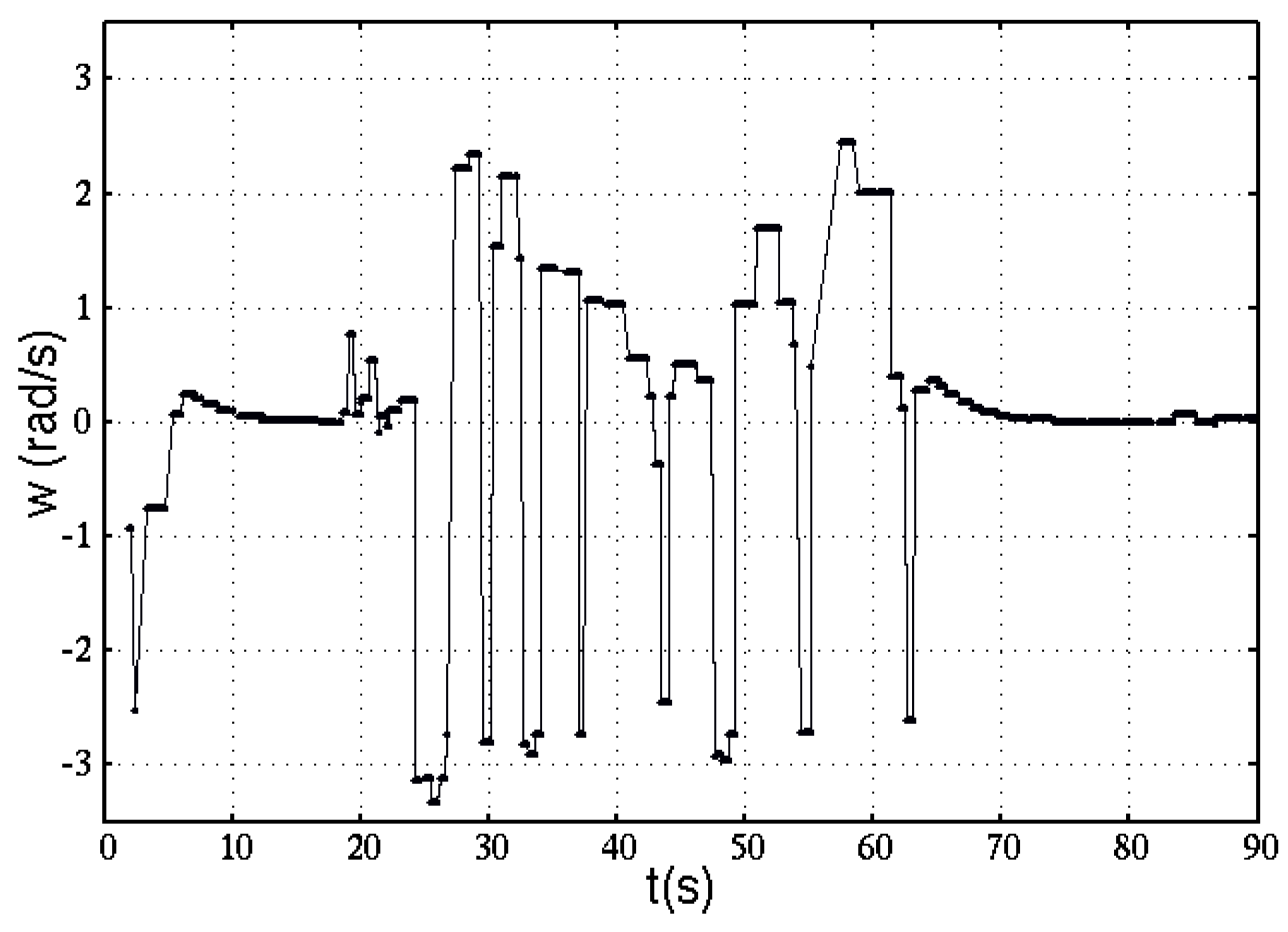
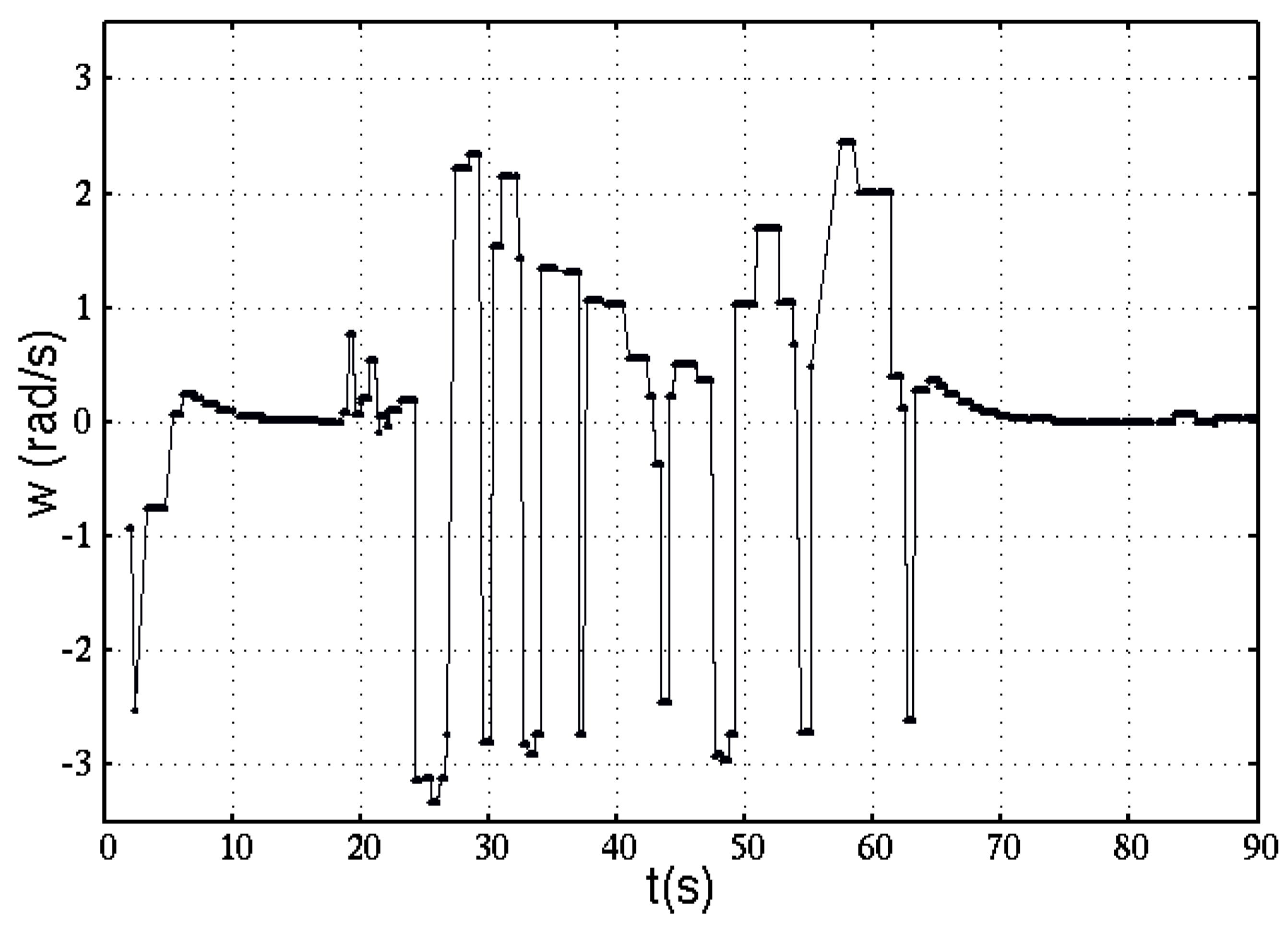
Proposition 8 (Encoder Angular Velocity Observation). A high-precision angular speed observation is obtained online by the first order differentiation: Therefore, the dual differential robot’s linear and angular velocities in terms of the wheels angular velocities are defined by:
and
The real angular velocity during this experiment, is being depicted in
Figure 16. Data were obtained during time
of this experiment. The angular velocity is expressed in rad/s.
Thus, the robot’s instantaneous displacement
:
Lemma 5 (Recursive Robot’s Position). The instantaneous robot’s position is inferred recursively by:and Therefore, the final equation for autonomous navigation control is established by:
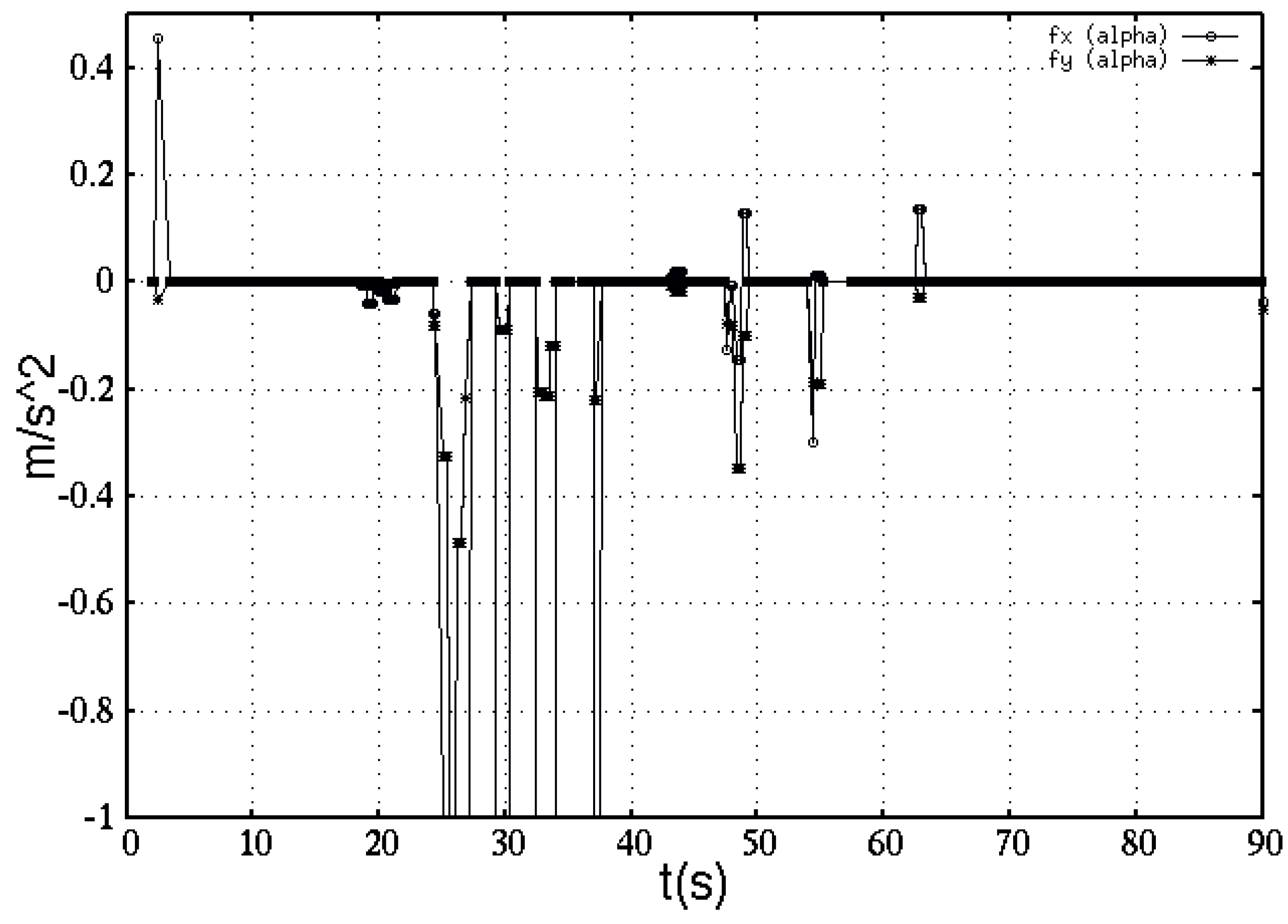
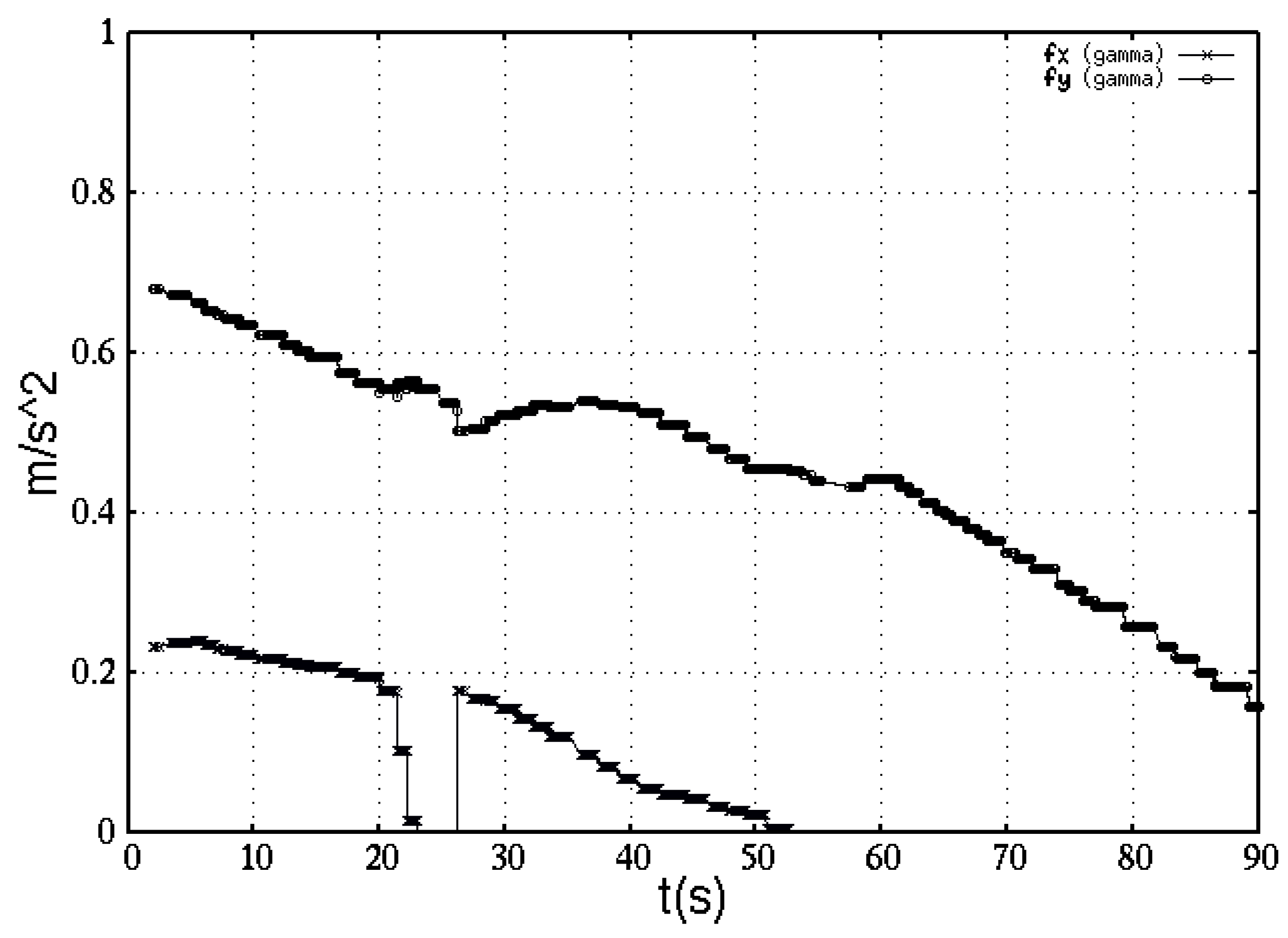
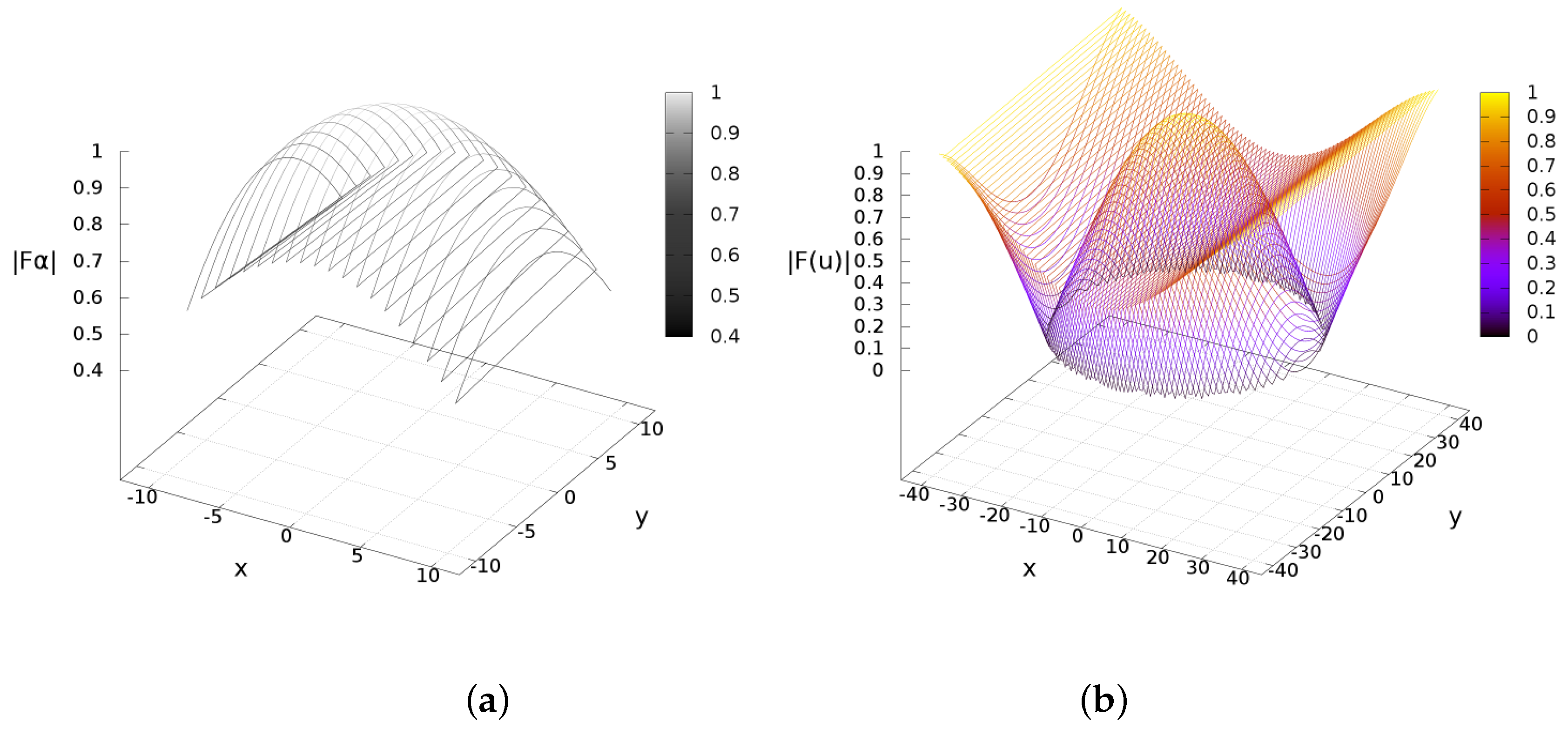
Theorem 2 (The Navigation Control Law). The robot’s motion equation leading to γ while avoiding numerous α is defined by: The attractive and the repulsive magnitudes
and
interact together, and regardless of the repulsive acceleration behavior, the attractive acceleration simultaneously decreases successively. When obstacles were not detected, it produced a type of smooth nonlinear behavior from beginning to end. This behavior is due to the configuration parameters related to the obstacles’ distance set experimentally. The robot’s total velocity is obtained by a time integration of
, and a robot’s maximal real velocity constraint. The robot’s physical actuators reach until
m/s with load included.
completing differentials by integrations in both sides of the equation:
Thus, the new recursive form for velocity that is physically implementable in the robot is given next:
And the real permitted robot’s speed
is constrained by the next expression:
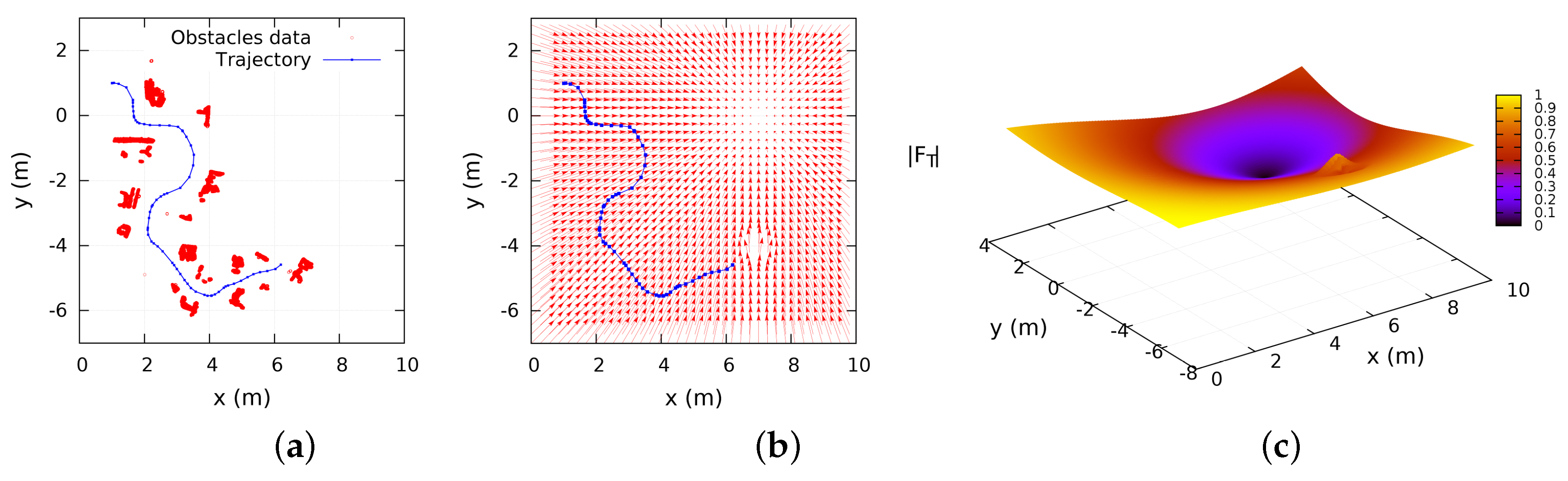
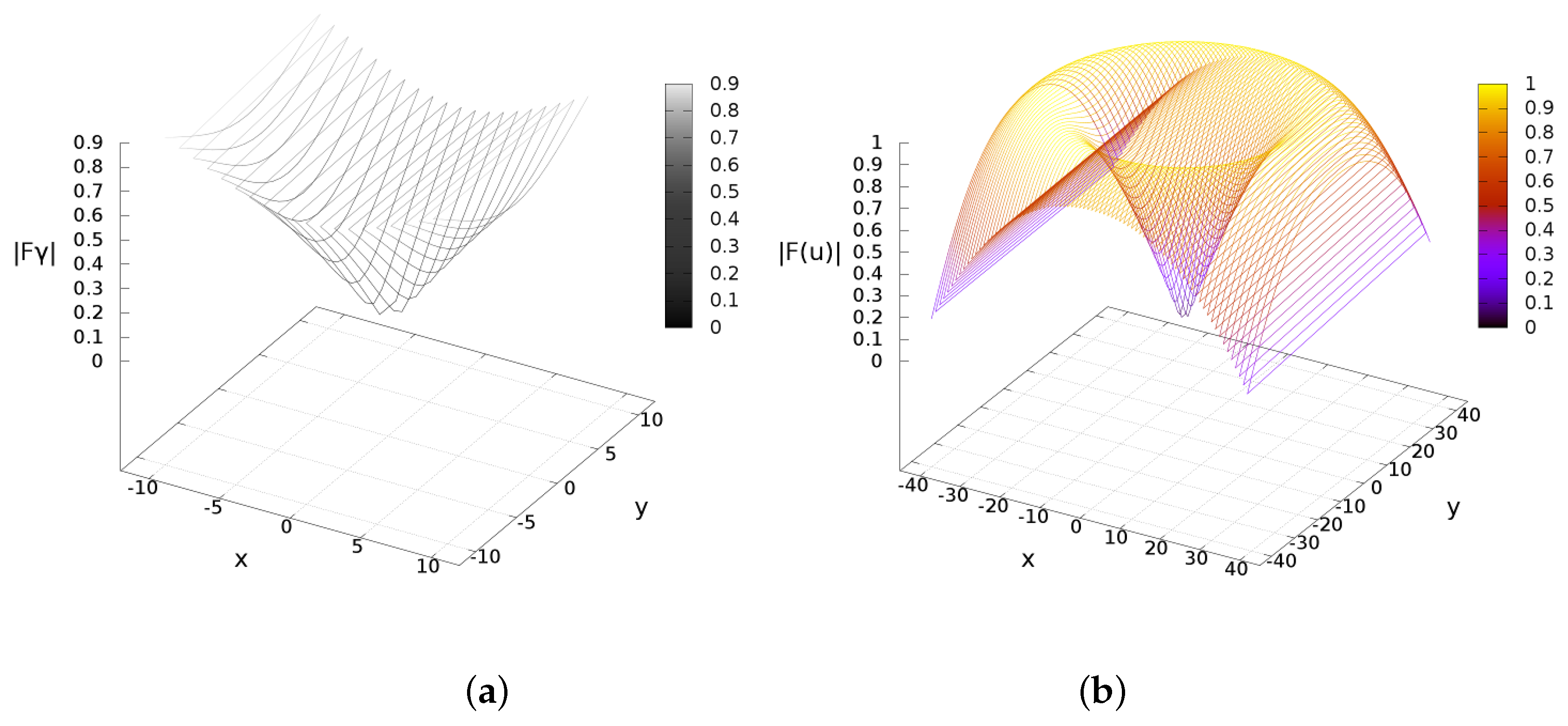
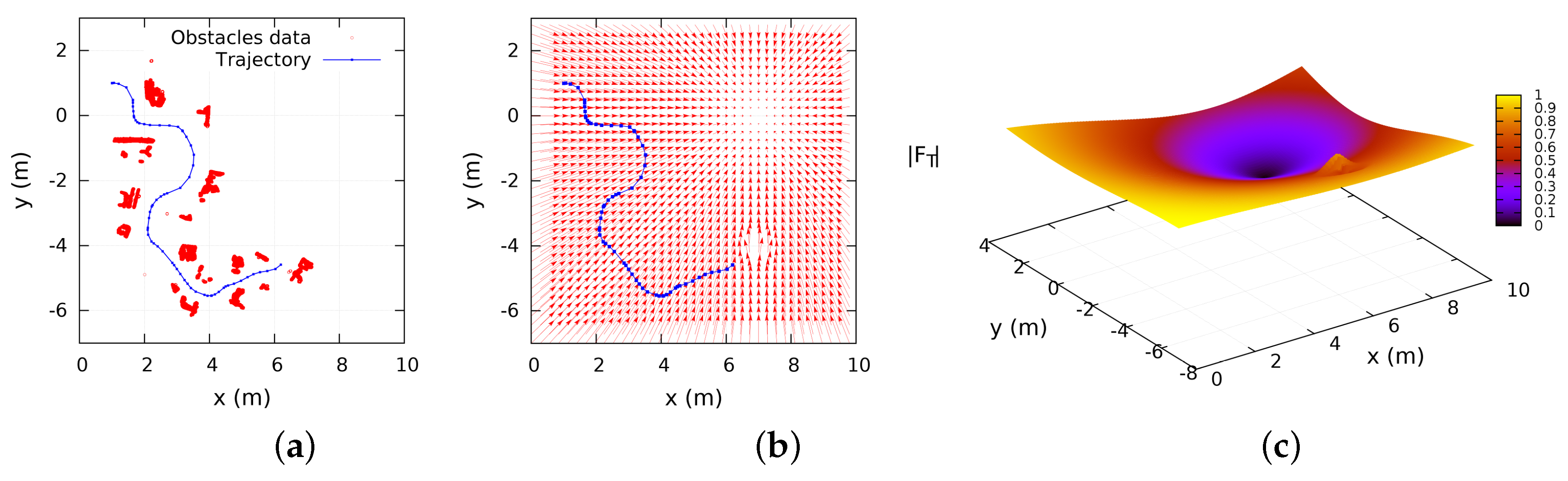
Figure 17a depicts experimental results of the robot’s trajectory in the obstacles map according to the Equation (2).
Figure 17b depicts the repulsive and attractive vector field.
Figure 17c illustrates the same vector field as 3D surface. The attractive effects produced by the source of heat at position
are demonstrated in the same illustration.
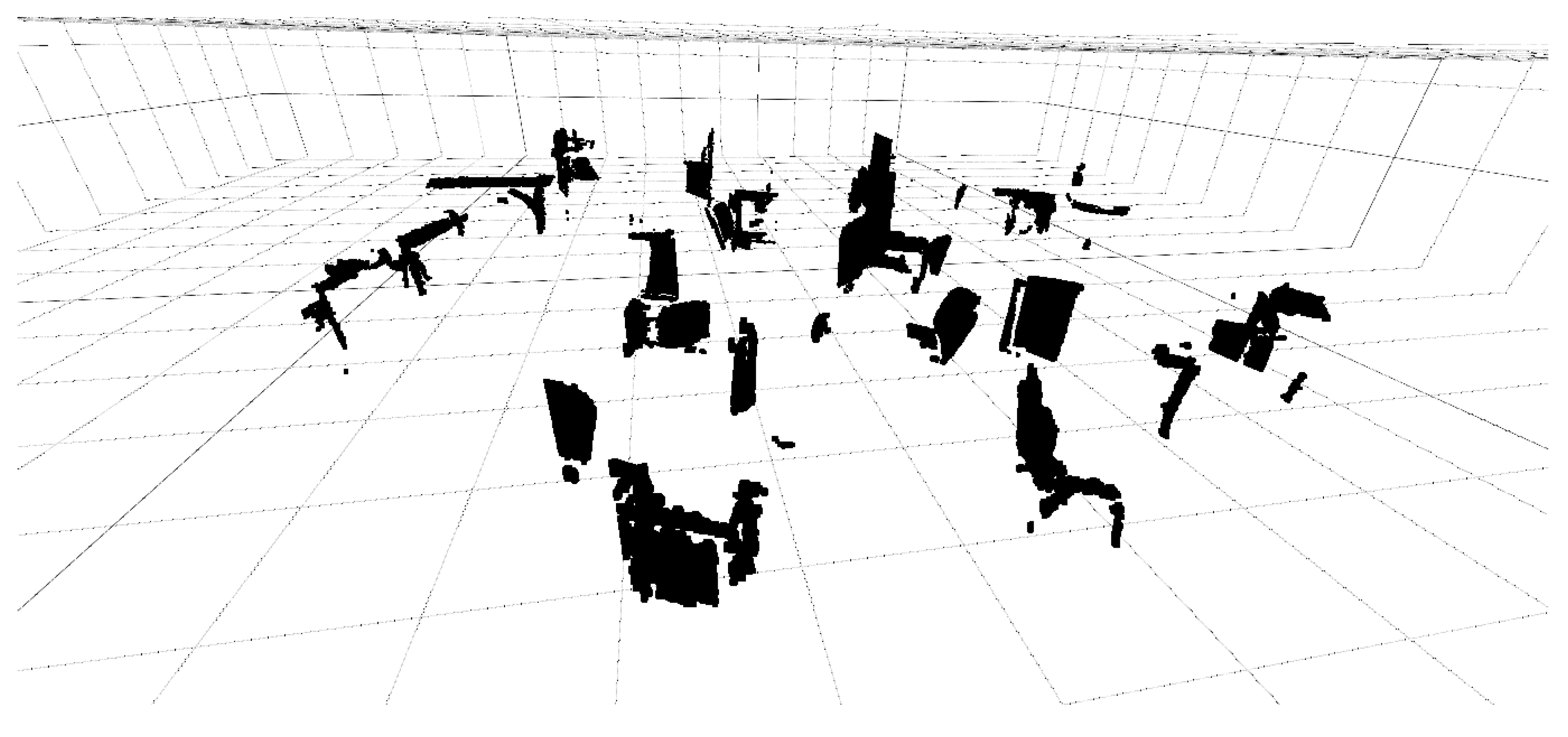
9. Experimental Navigation
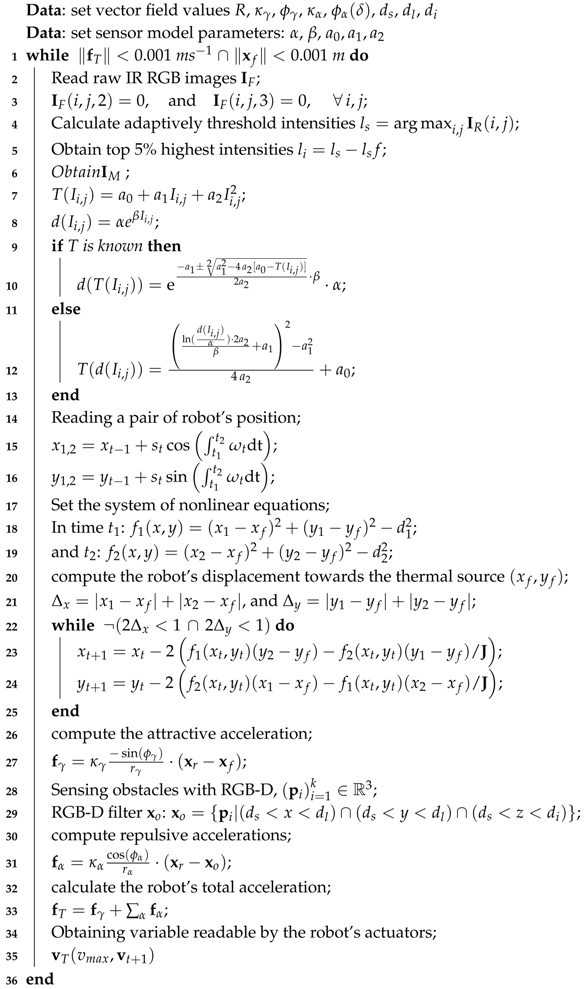
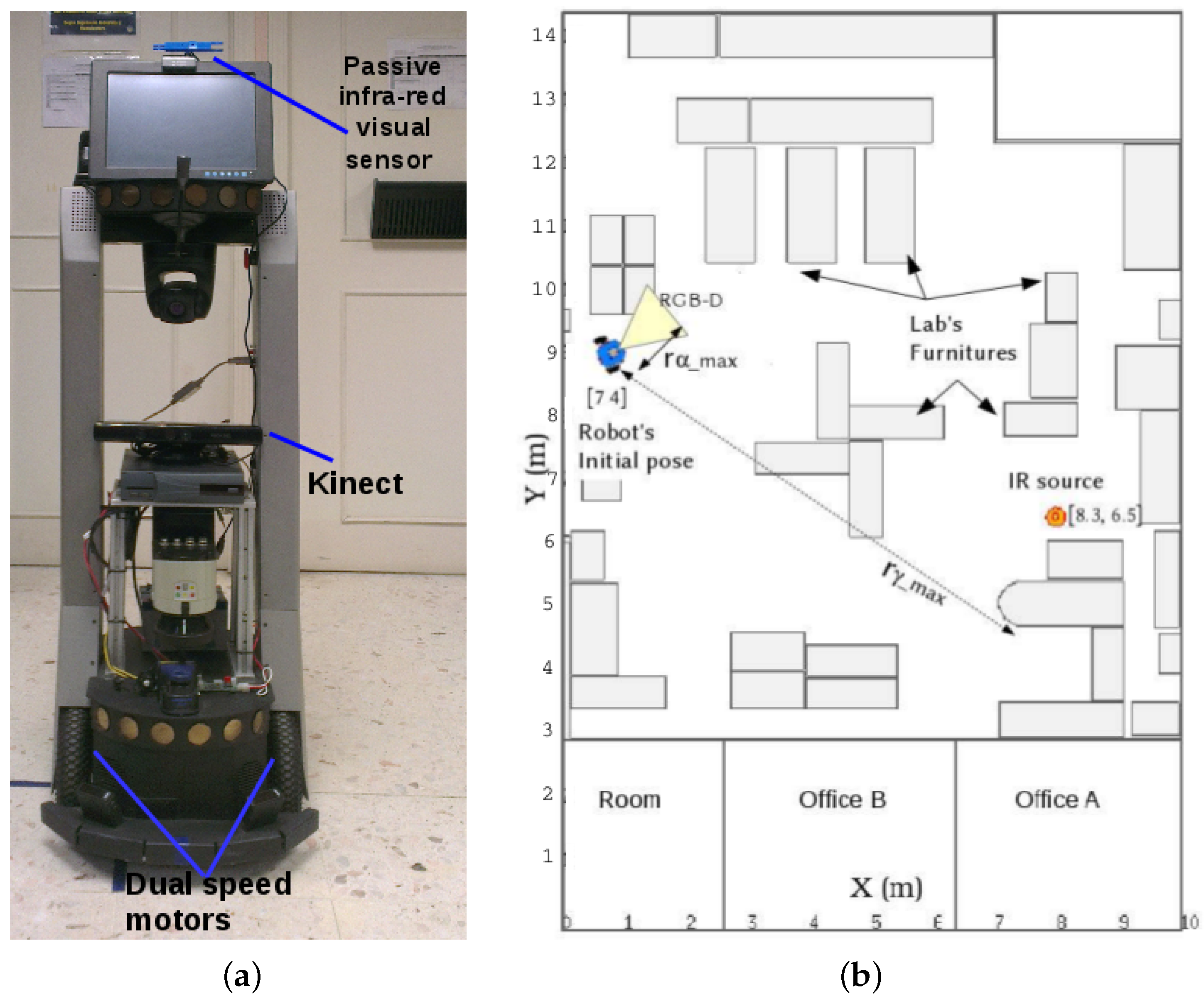
This section presents some discussions on further experimental results and parameters numerical adjustments. The experiments’ purpose is to autonomously find a near-IR source within the Robotic Lab in the presence of multiple obstacles. This manuscript’s mathematical framework provided us concrete and sophisticated elements to develop a control-sensing algorithm. The
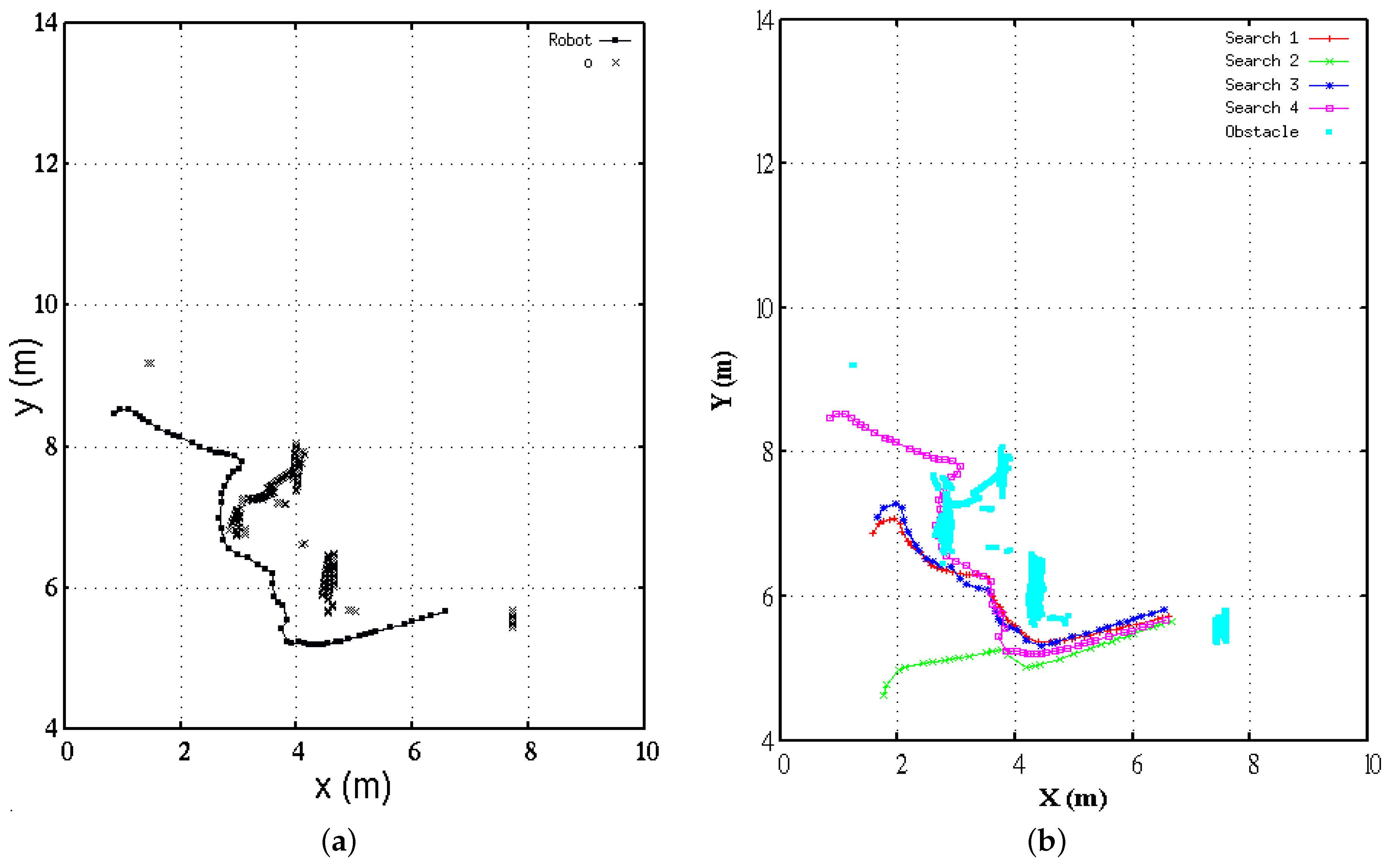
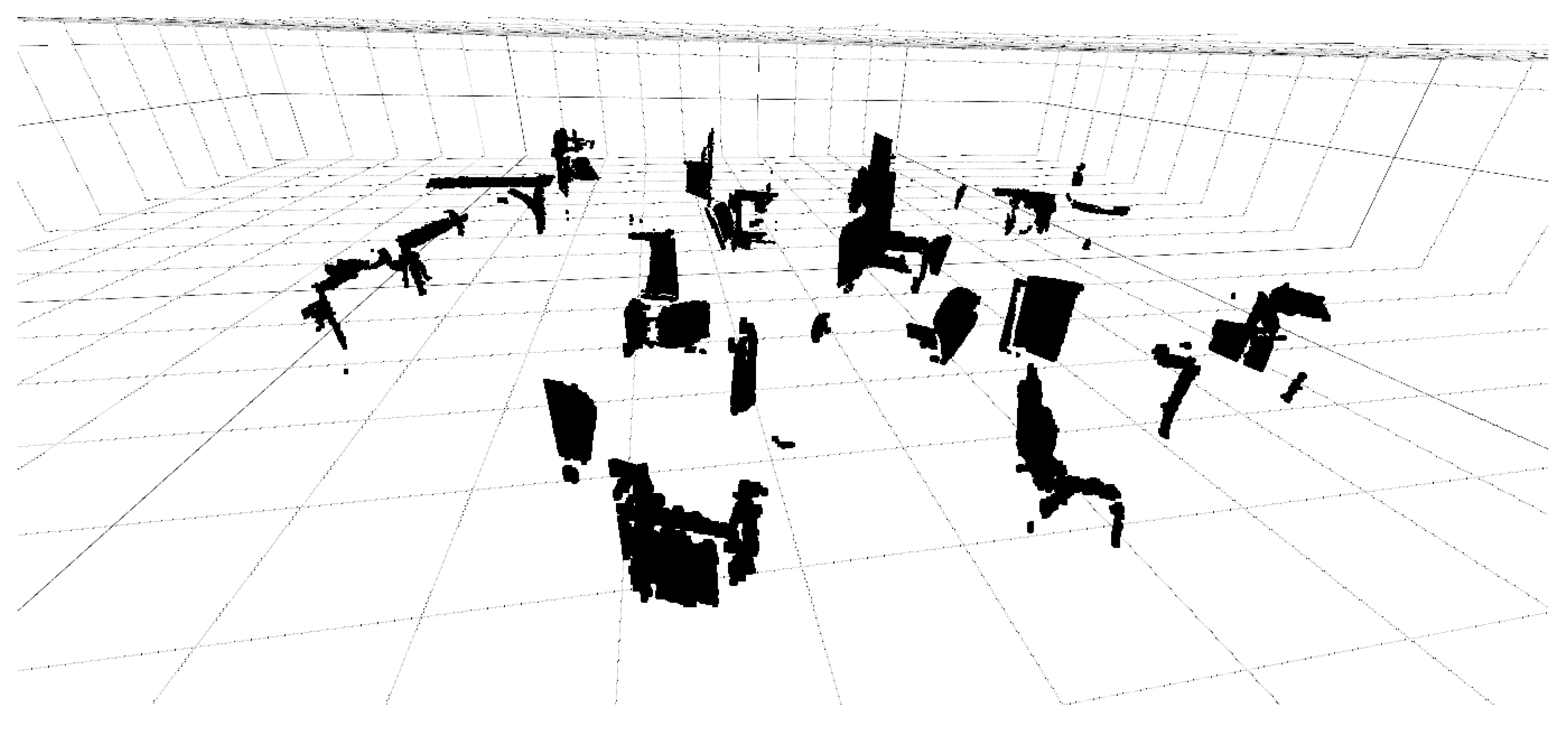
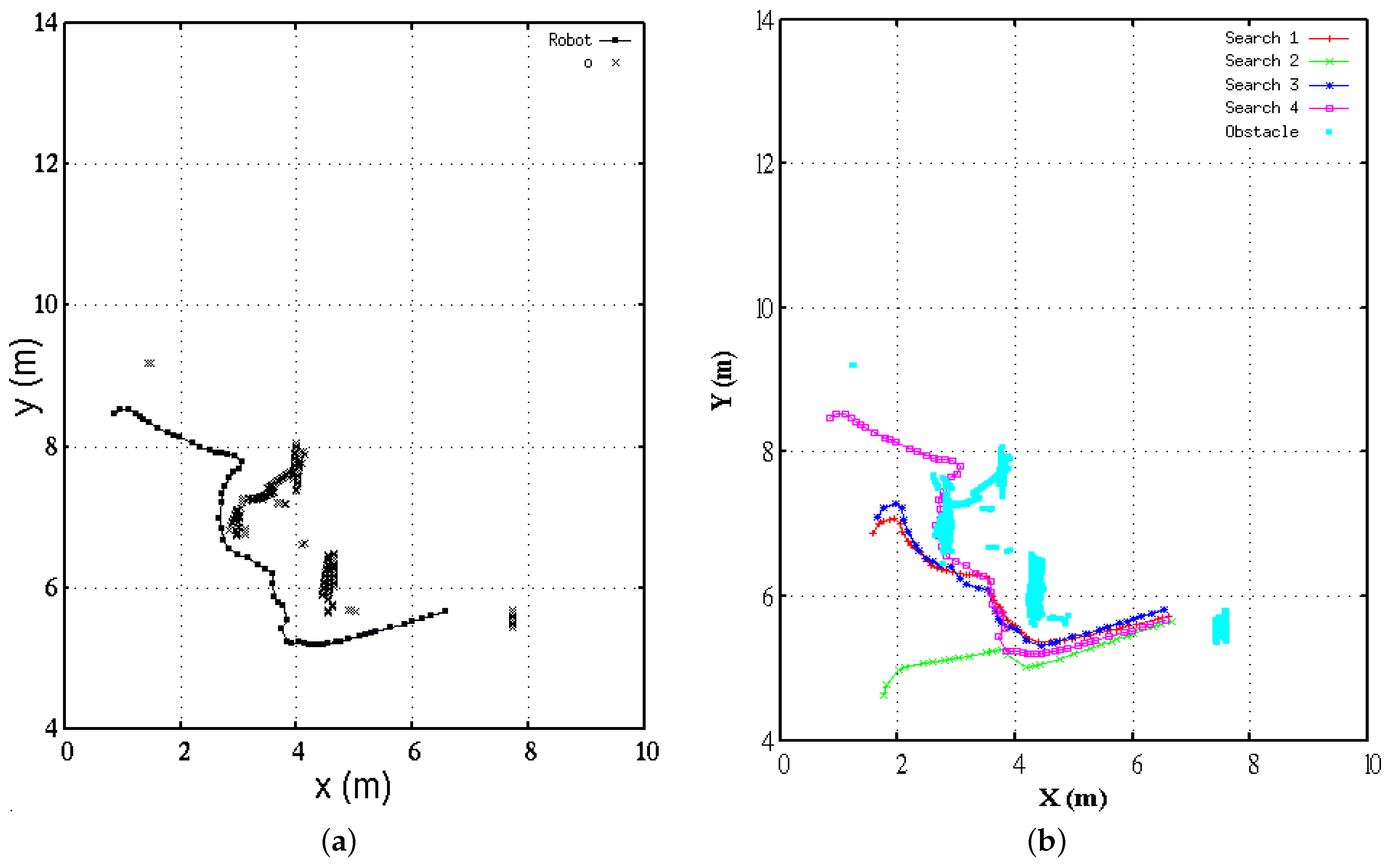
Appendix A lists the robot’s pseudo code that the robotic platform carried out for experimental autonomous missions. A successful experimental search is depicted by the robot’s trajectory in
Figure 18a. The obstacles mapped are denoted by the symbol ×, and only appear on segments of the obstacles because RGB-D data were constrained using a spatial discriminant filter. In this work’s purpose, obstacles detection is useful solely to avoid online collisions with too near obstacles, unlike other approaches, where a more extensive local map is constructed and used for planning or environmental modeling.
The IR sensing model is calibrated a priori before sensor deployment. Calibration and characterization are required for any new source of IR emissions (i.e., different temperature, device’s material), and for any change to the sensing device (e.g., changing the filter film, using different camera or lens). For the case of experiment of
Figure 18, our IR sensor is a USB camera with vertical visual angle
, and horizontal angle
. The exponential model values were set to
, and
, and, likewise, for the polynomial coefficients
,
, and
. In addition, the control parameters were established as: an attractive territorial distance
m, a repulsive territorial distance
m. Discriminant constraints
m and
, which means that only objects on the line of sight of 1 m were detected. The robot’s encoders have a resolution
pul/rev. An attractive acceleration gain
m/s
, and repulsive gain
m/s
. The physically allowed maximal speed of the robot is
m/s. It is worth mentioning that any weight change onboard the robot implies parameter re-adjustments.
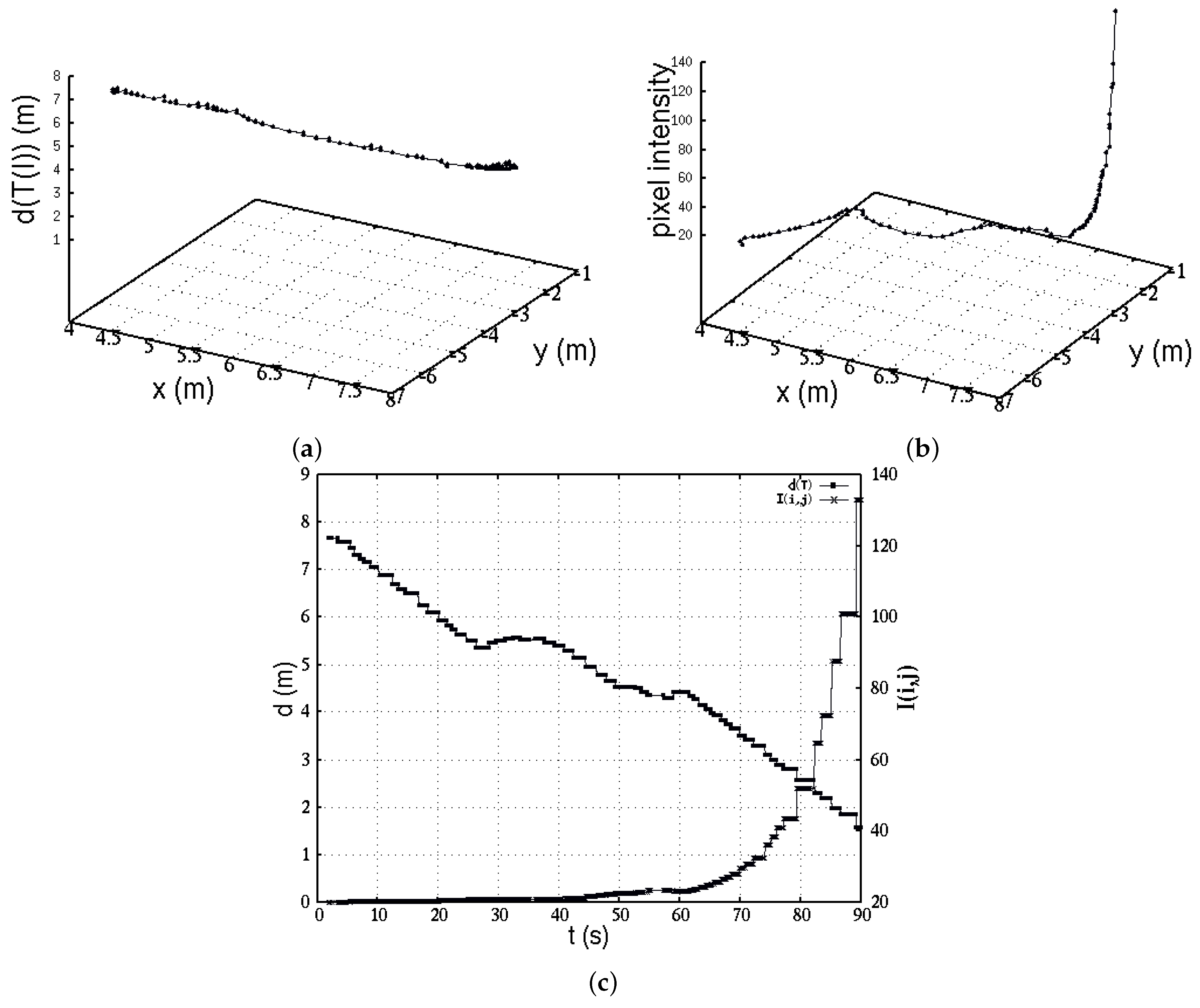
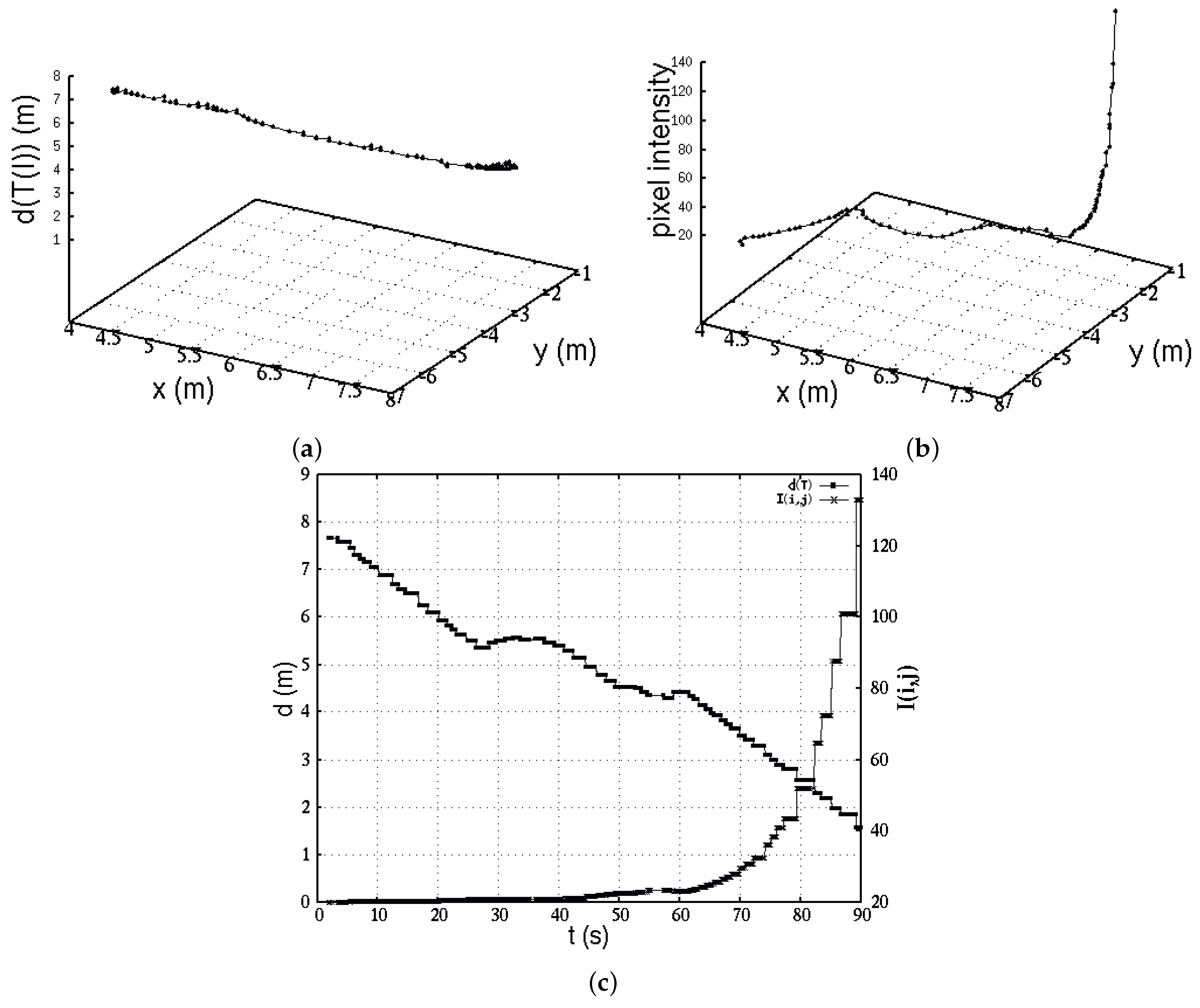
The solution of the planning system is validated by results depicted in
Figure 19. The successive numerical approximations about distance estimation are plotted at each robot’s Cartesian position. During navigation, the IR sensor’s field of view was able to see either direct device near-IR radiance, or other objects’ reflectance. These situations happened due to the robot’s turns. However, it really did not represent a major problem for the robot’s visual sensor because of the high radiance power of the IR source. At each control loop, the vision algorithm calculated maximal 5% of the pixels’ intensity. Nevertheless, only a single region was considered for pixel processing. For future works, however, the algorithm must take into account multiple regions simultaneously that are detected with similar levels of radiance. The vision algorithm could even better enhance the robot’s efficacy to find the IR source, however, currently, this is out of the scope of this work.
Therefore,
Figure 19b shows the maximal intensity pixel value w.r.t. the robot’s Cartesian location. As the robot gets nearer to the IR radiation source, the pixel intensity observation value increases. Sometimes, this occurs when the robot is unable to see directly towards the IR source; in that case, the robot utilizes prior numeric values of pixel observation. If numerical inaccuracy is evolving, then it is successively corrected when the robot again detects the IR source.
In addition,
Figure 19c depicts a comparative view of behaviors between sensor data
, and estimation of
. It is interesting to notice the period 60 s–90 s, where the distance is linearly decaying, and the intensity
increases rapidly. This means the robot is sensing the IR source directly in its field of view, and therefore leading straight towards the destination. As an evidence of this approach, there is an important correlation with the robot’s trajectory of
Figure 18, where along the
X-axis in range 4 m–7 m the robot basically moved in a straight line. Finally, we validated our approach through multiple experiments with different robot’s initial positions, and minimal parameters adjustment.
Figure 18b illustrates four different search and find trajectories carried out by the wheeled robot. Trajectory 4 is the pathway that was previously used for analysis through this manuscript. In this plot, experiments began with the robot at different Cartesian locations, but kept the IR source at the same location for the four experiments.
10. Conclusions
An autonomous navigation system for a mobile robot to find a thermal source by sensing IR images was developed. This manuscript has focused on the mathematical modeling and deterministic formulations of the robotic system. The system performance was fast, precise, and adequate for online and real-time applications. A passive thermal infra-red visual sensor was developed in the laboratory in a way that was very low-cost and effective for the task’s purpose. The sensor’s capability to detect the IR spectrum was characterized. By using Wein’s law of displacement of radiation power, the infra-red images were coherent with the family of curves established and was solved by online adaptive threshold for image segmentation. Empirical models were fitted by nonlinear regressions, 2nd degree polynomial for image-temperature, and exponential for image-distance. Both models adjusted precisely and conveniently including environmental degraded atmospheric transmission, varying lighting and thermal conditions, lens’ diffraction pattern, and so forth. Thus, by following the proposed methodology, both models can be automatically recalibrated either when changing scenarios, or changing the CCD camera device. The subtle closed-form of the sensing model distance-temperature, and inverse solution fitted a family of curves. If parameters re-adjusted, it allowed the distinguishing of different thermal sources with the same IR image.
The proposed searching planning system was solved using an online numerical solution, which computationally faster to implement than the analytical solution. The present approach expended less than 10 iterations at each control loop to estimate the heat source location in global coordinates.
For the robot’s course control, we formulated a simple but effective half sine (attractive) and half cosine (repulsive) functions as directional derivatives. The control activation distance is a range between rad. Such an angle is determined as a function of the robot’s territorial distances w.r.t. the goal and the obstacles.
Finally, the proposed approach can be applied to search other types of targets without making considerable changes and developments. For instance, the planner and the navigation control may prevail as proposed in this manuscript. However, in order to search and explore in other types of real environments and applications, the major changes focus on obtaining new empirical sensor models, and reformulating the sensing models for different types of sensors. Other sensors may vary in types and modalities such as electromagnetic radiation sources, electric potentials, electrochemical signals. In the meantime, a proper sensing device is available and is modeled by applying the same regression methods.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}