
A Study of a Handrim-Activated Power-Assist Wheelchair Based on a Non-Contact Torque Sensor


Abstract
:1. Introduction
2. Materials and Methods
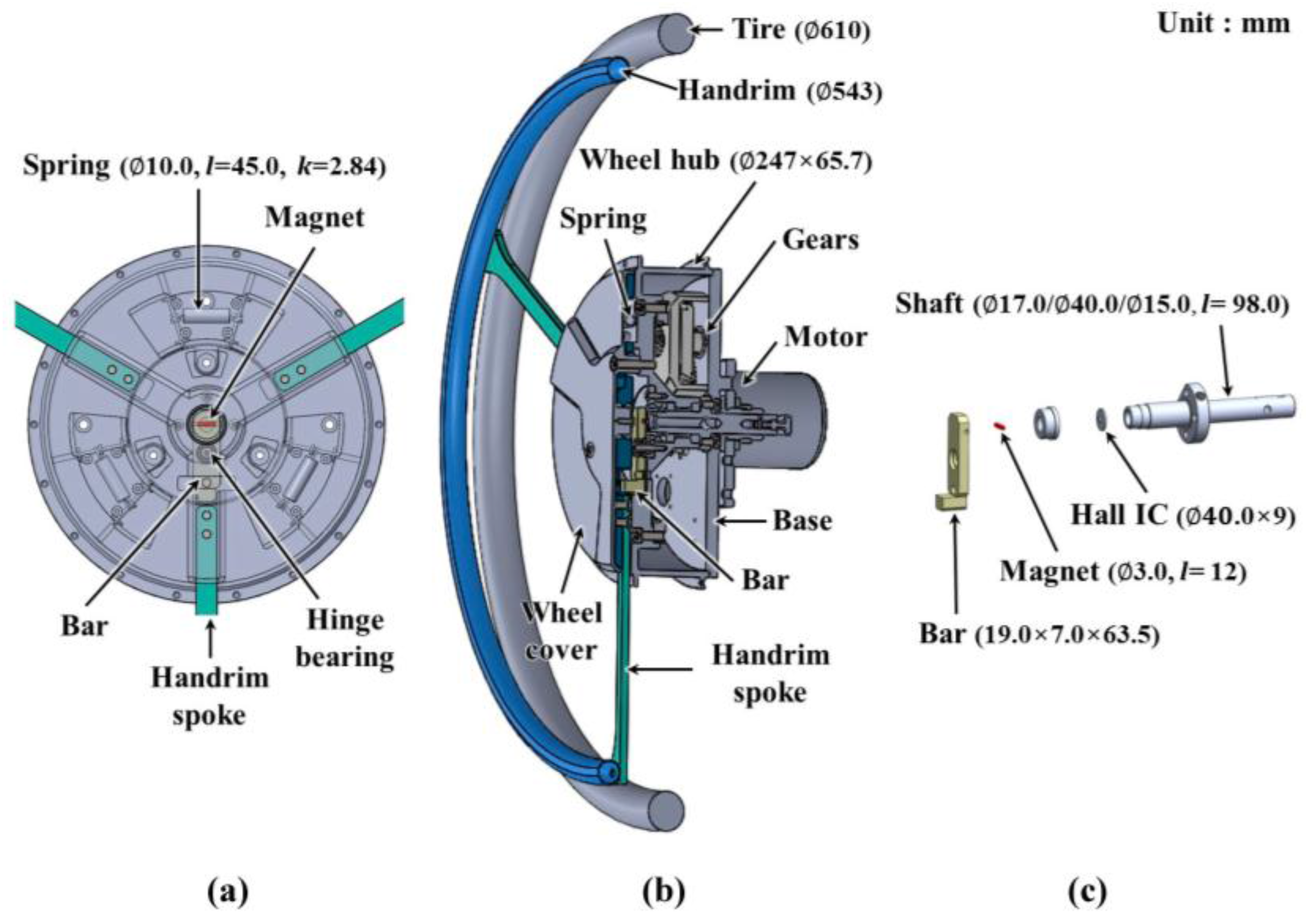
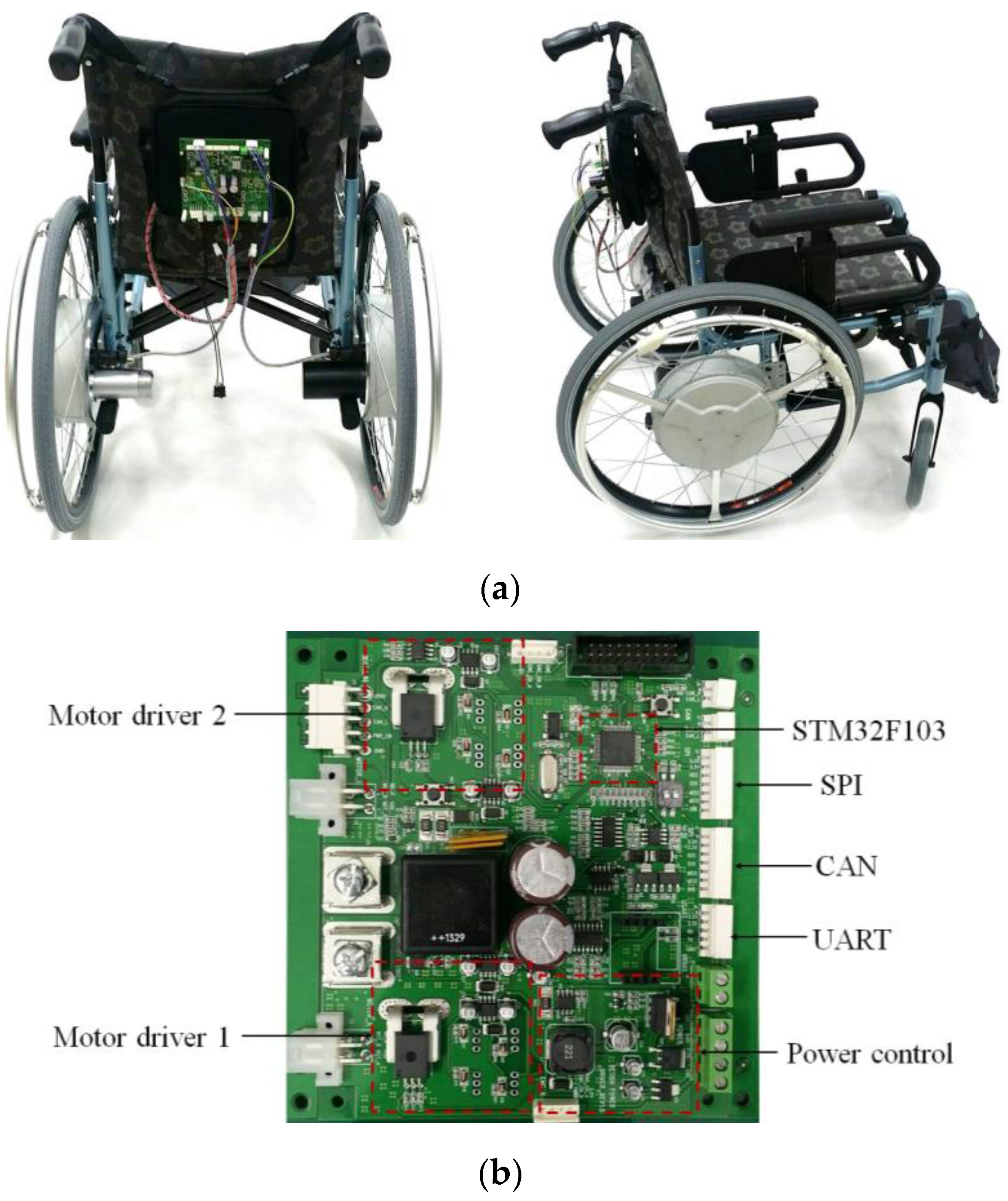
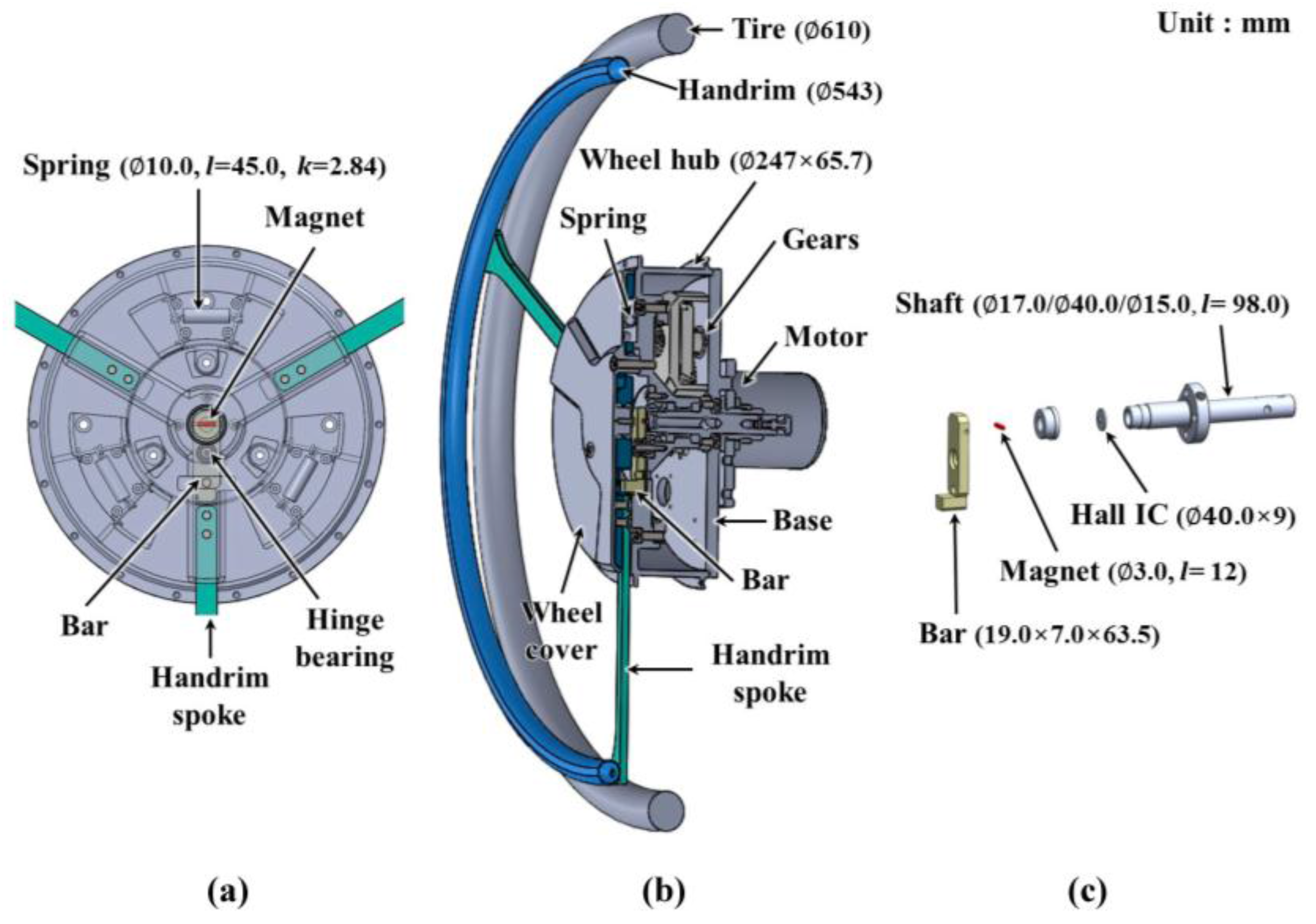
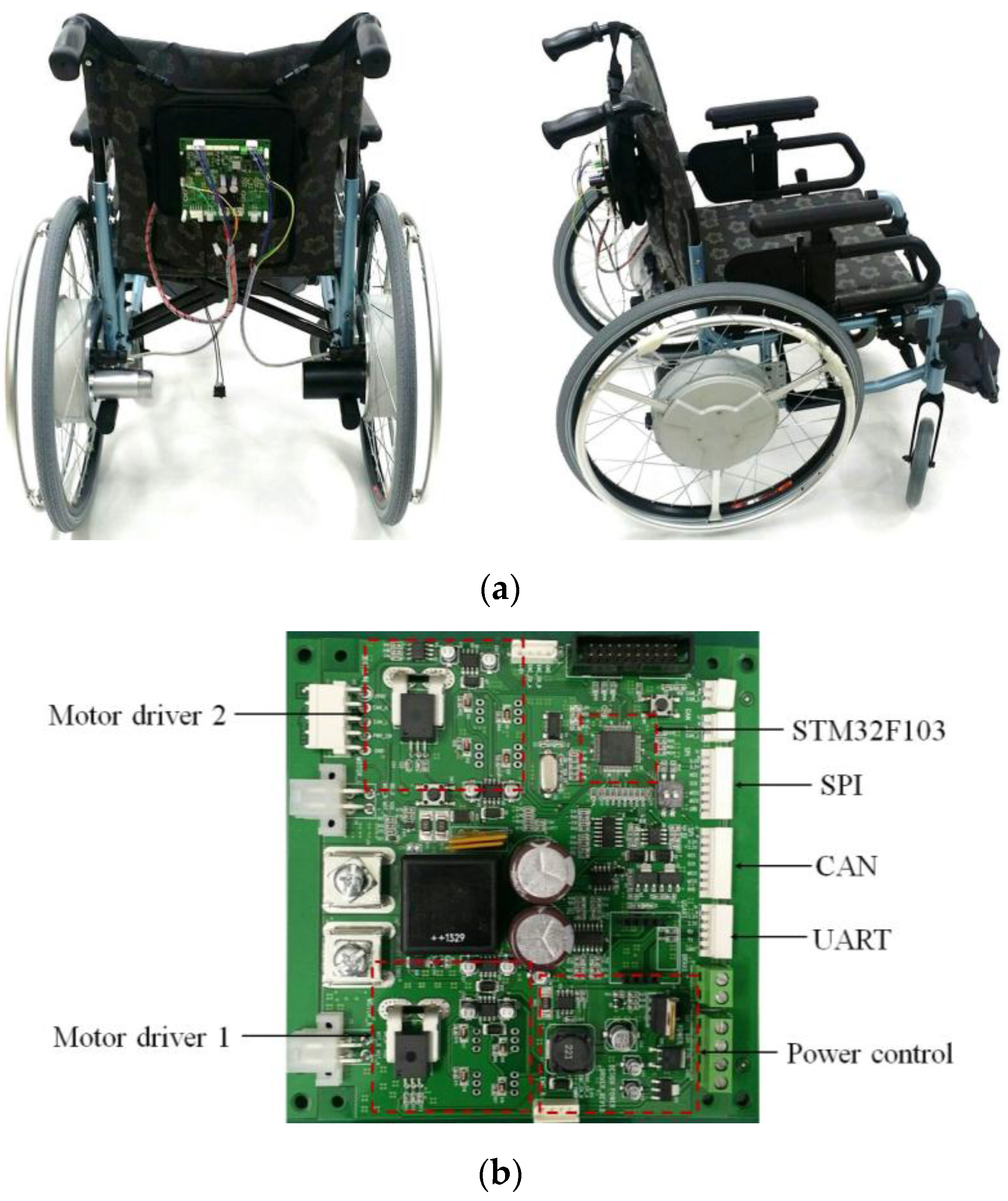
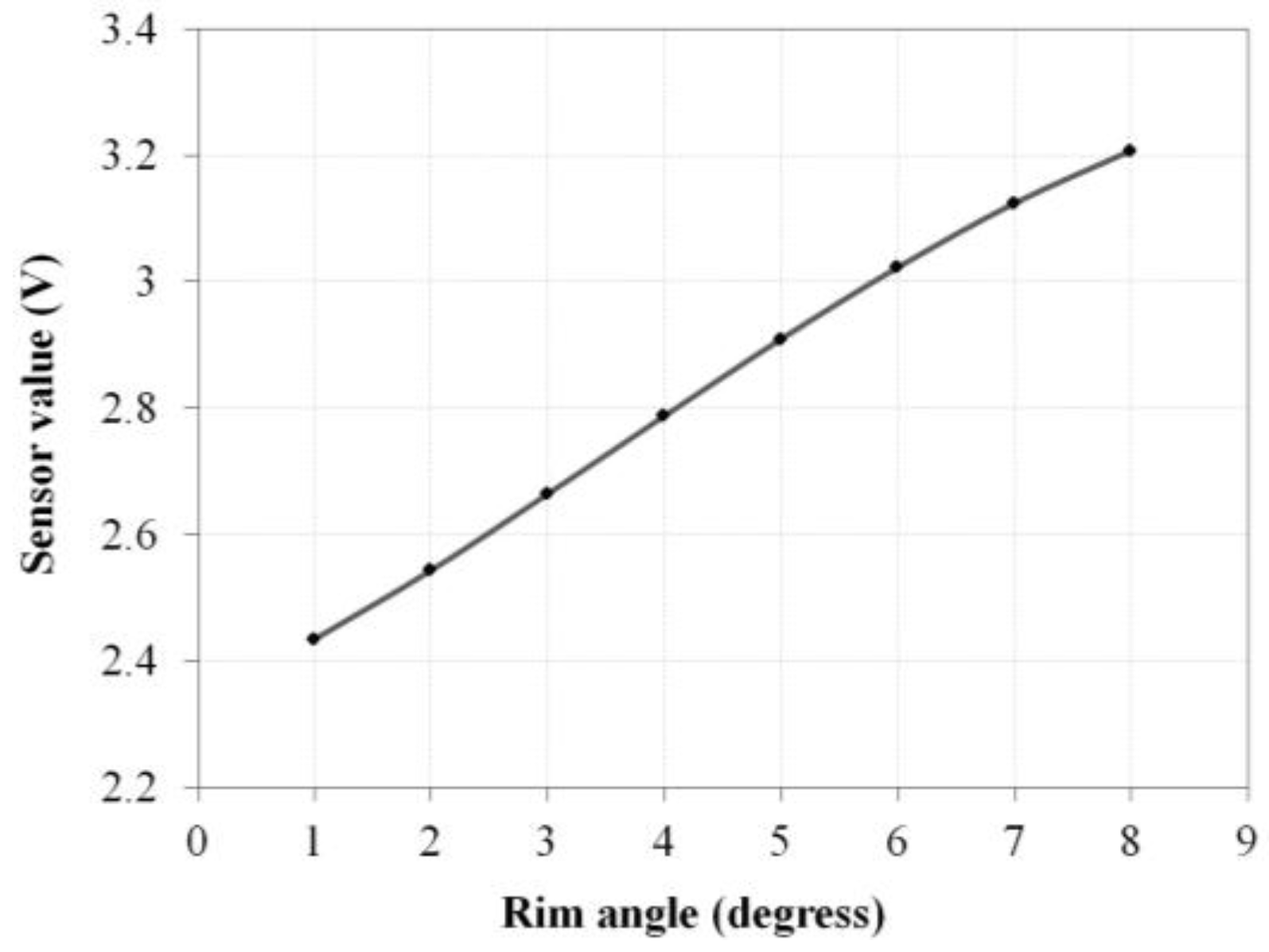
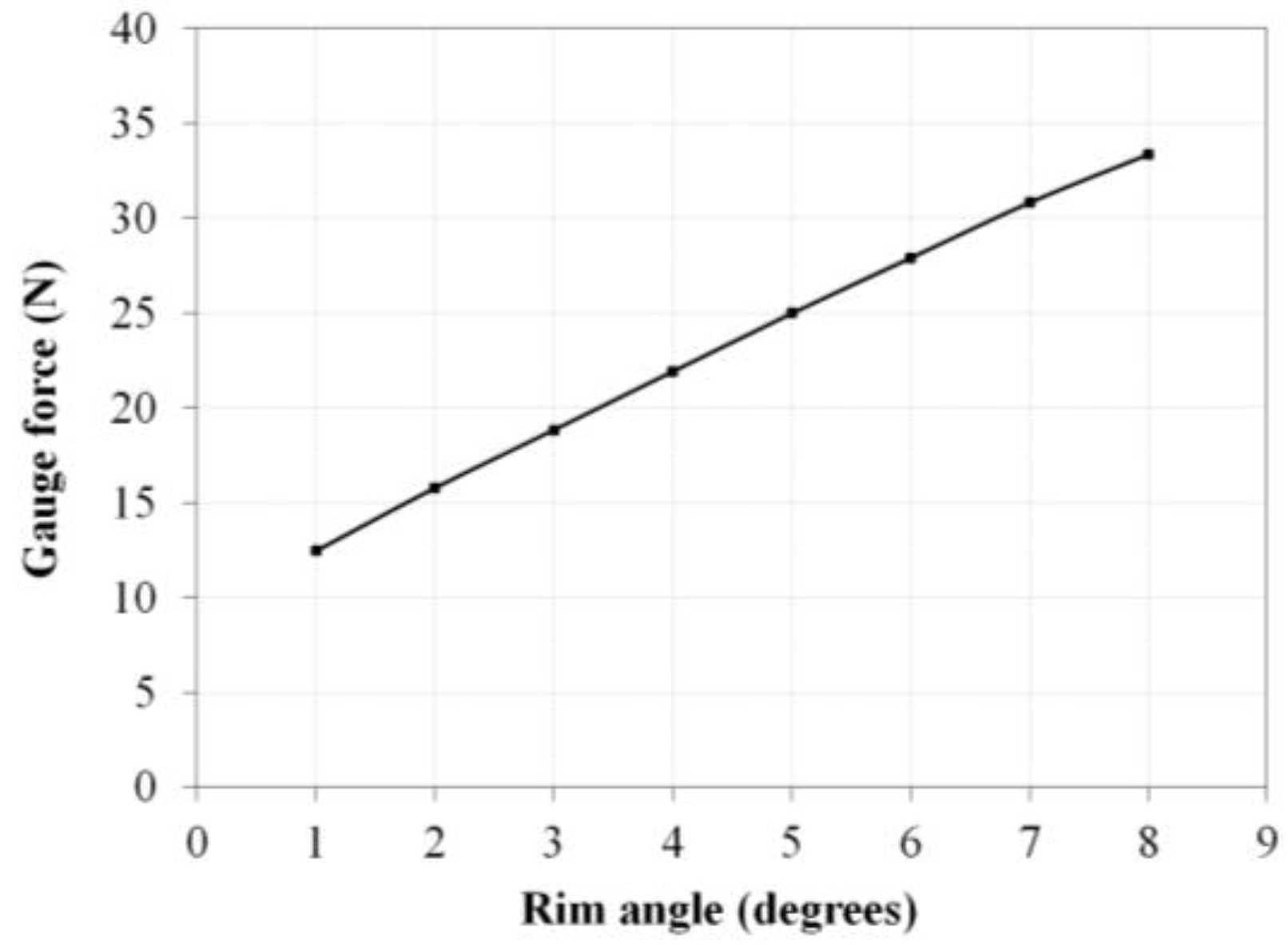
2.1. Design of a Driving Wheel with a Non-Contact Torque Sensor
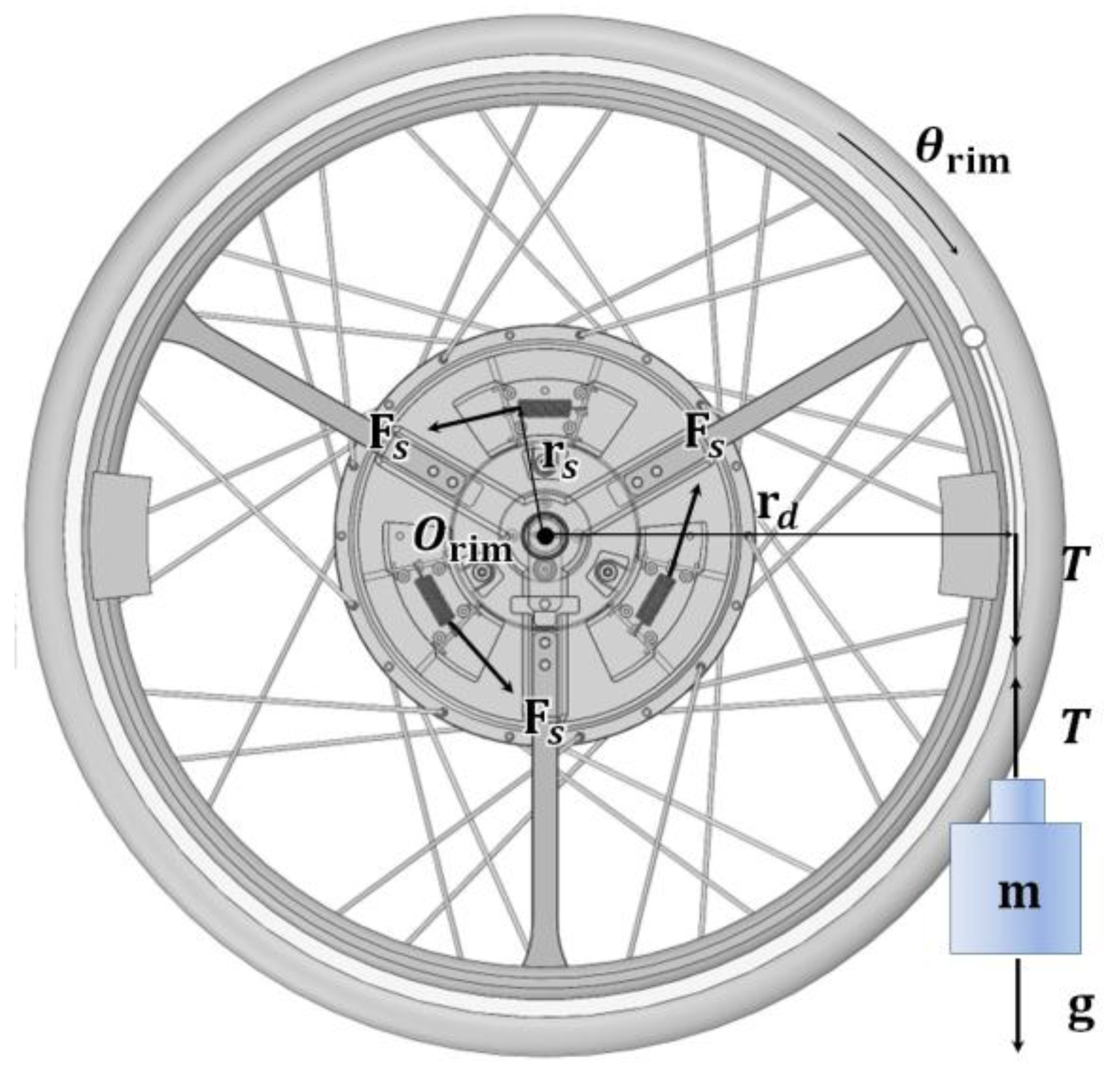
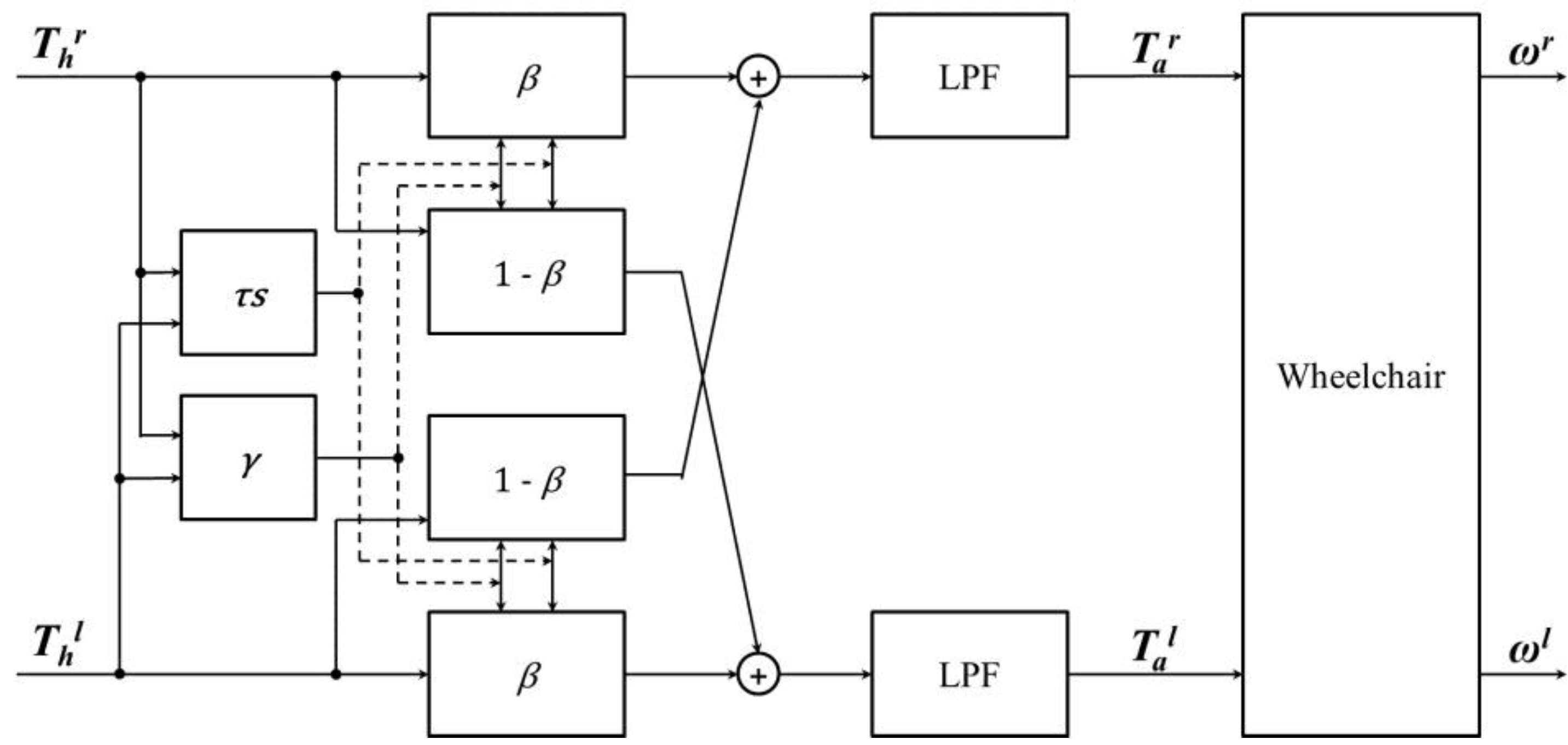
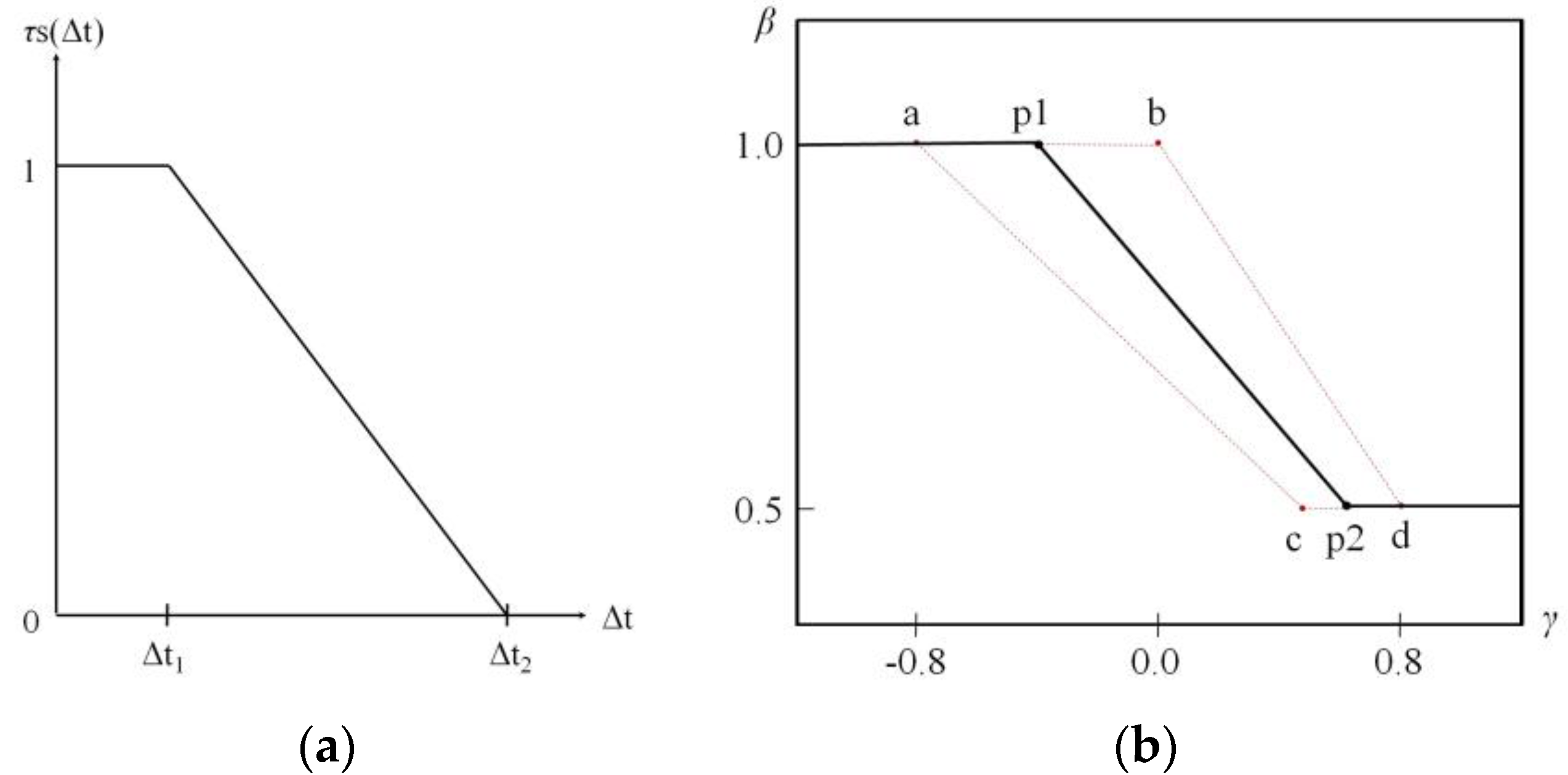
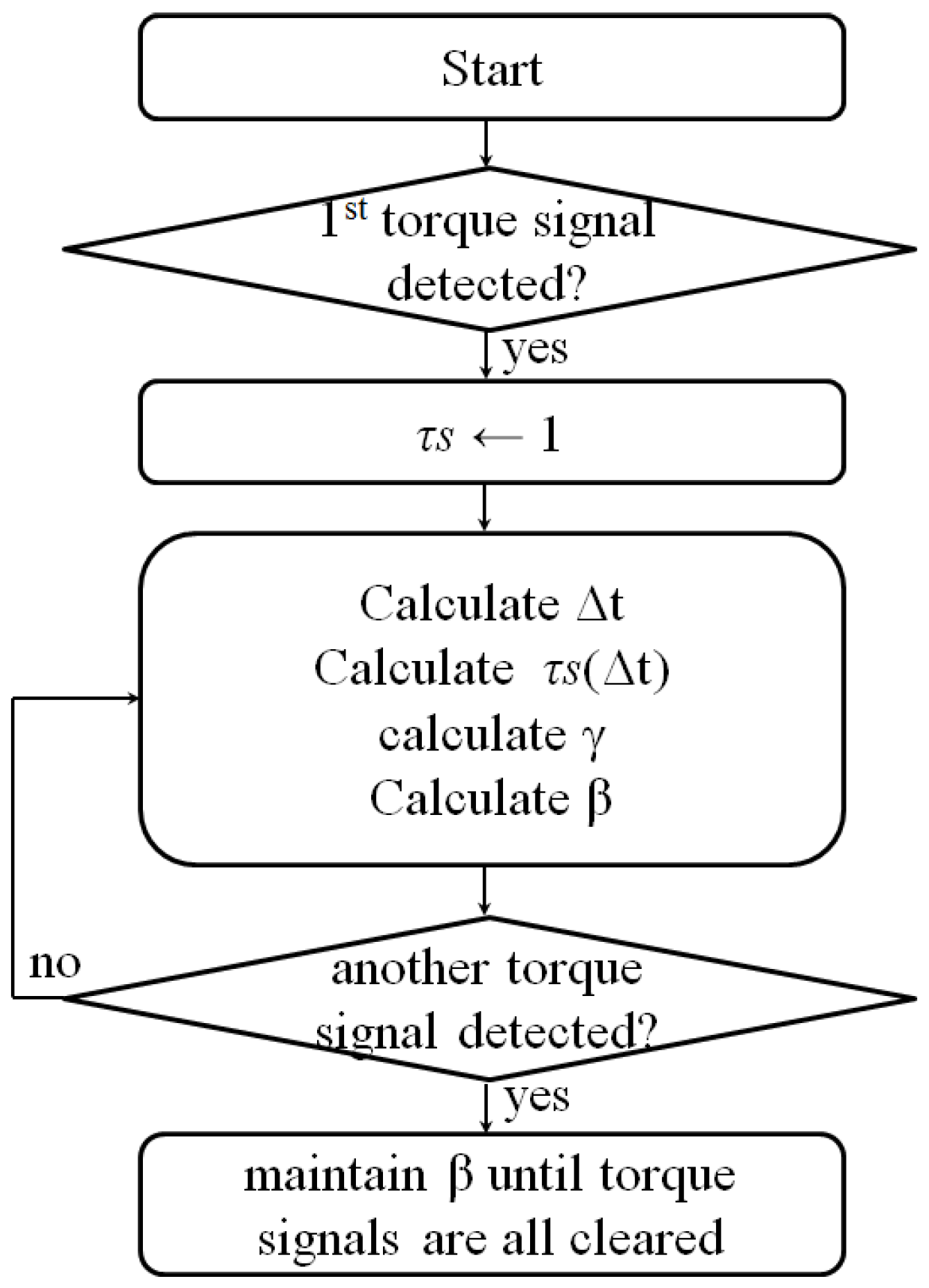
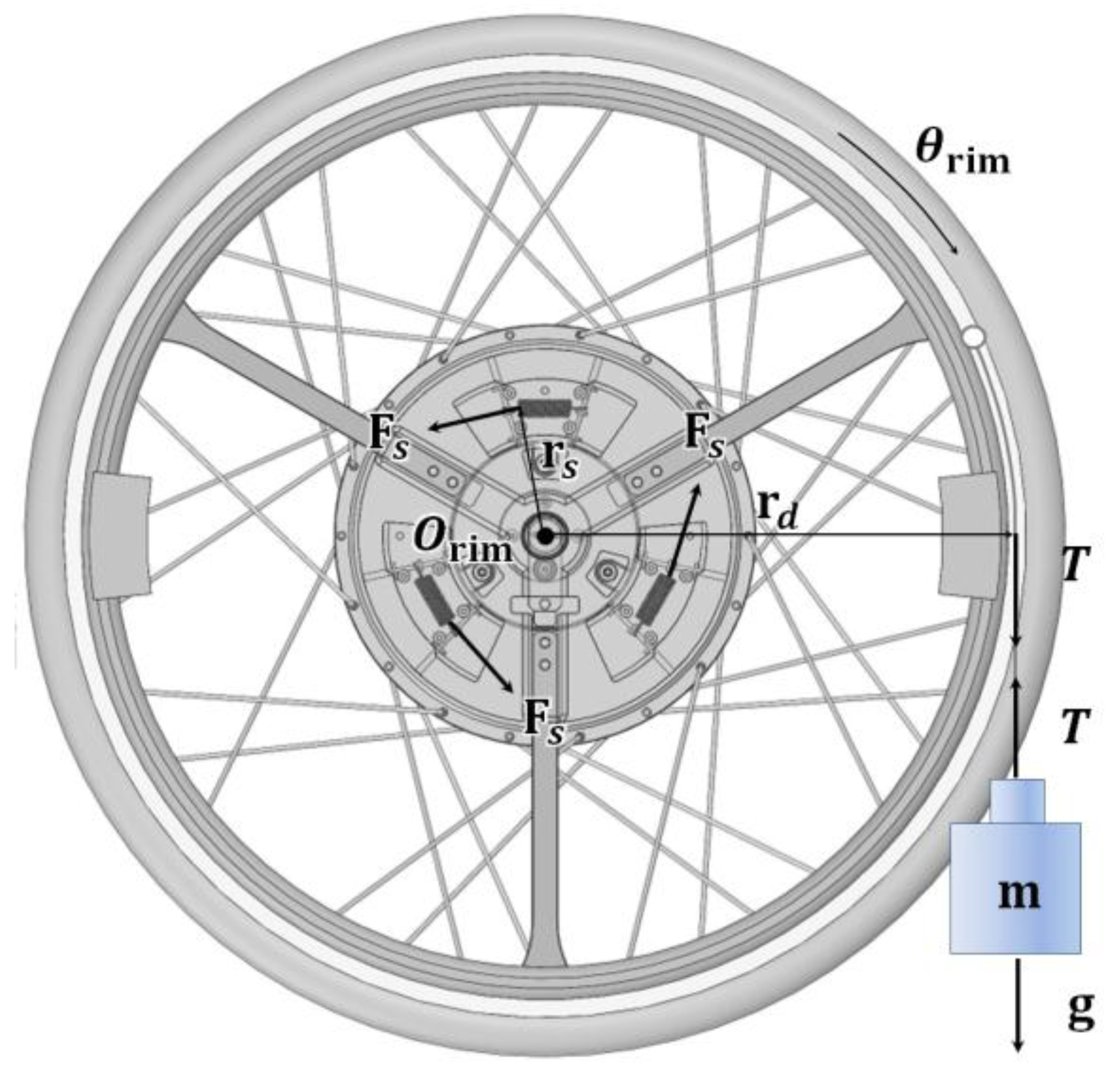
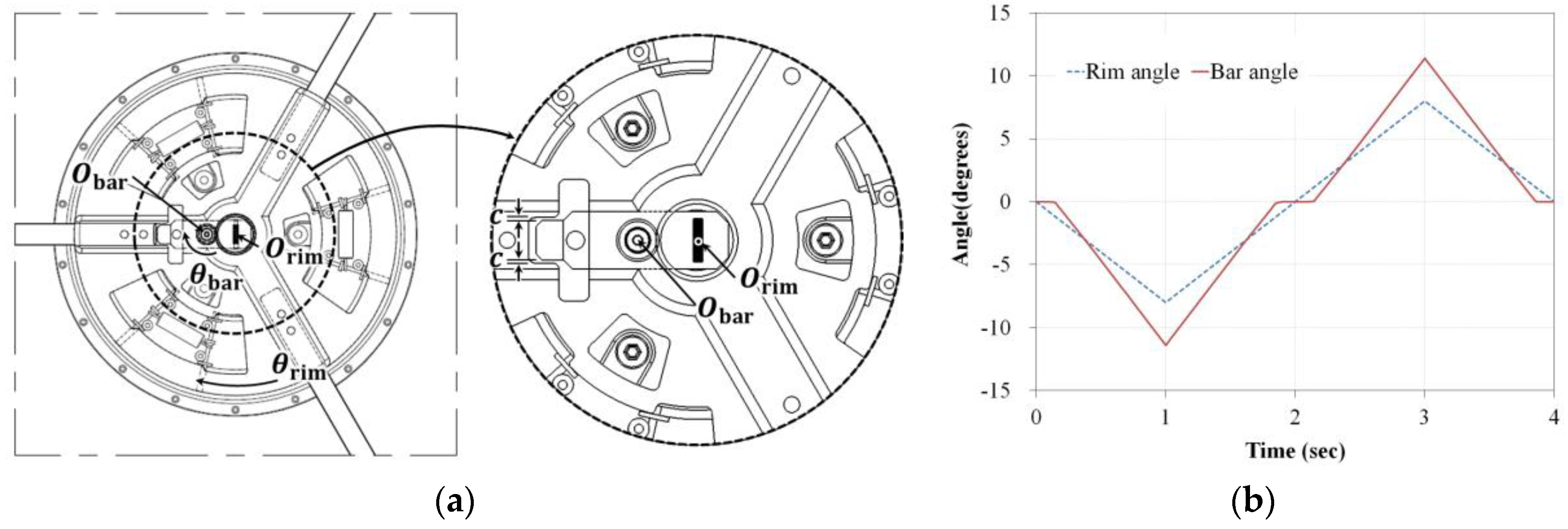
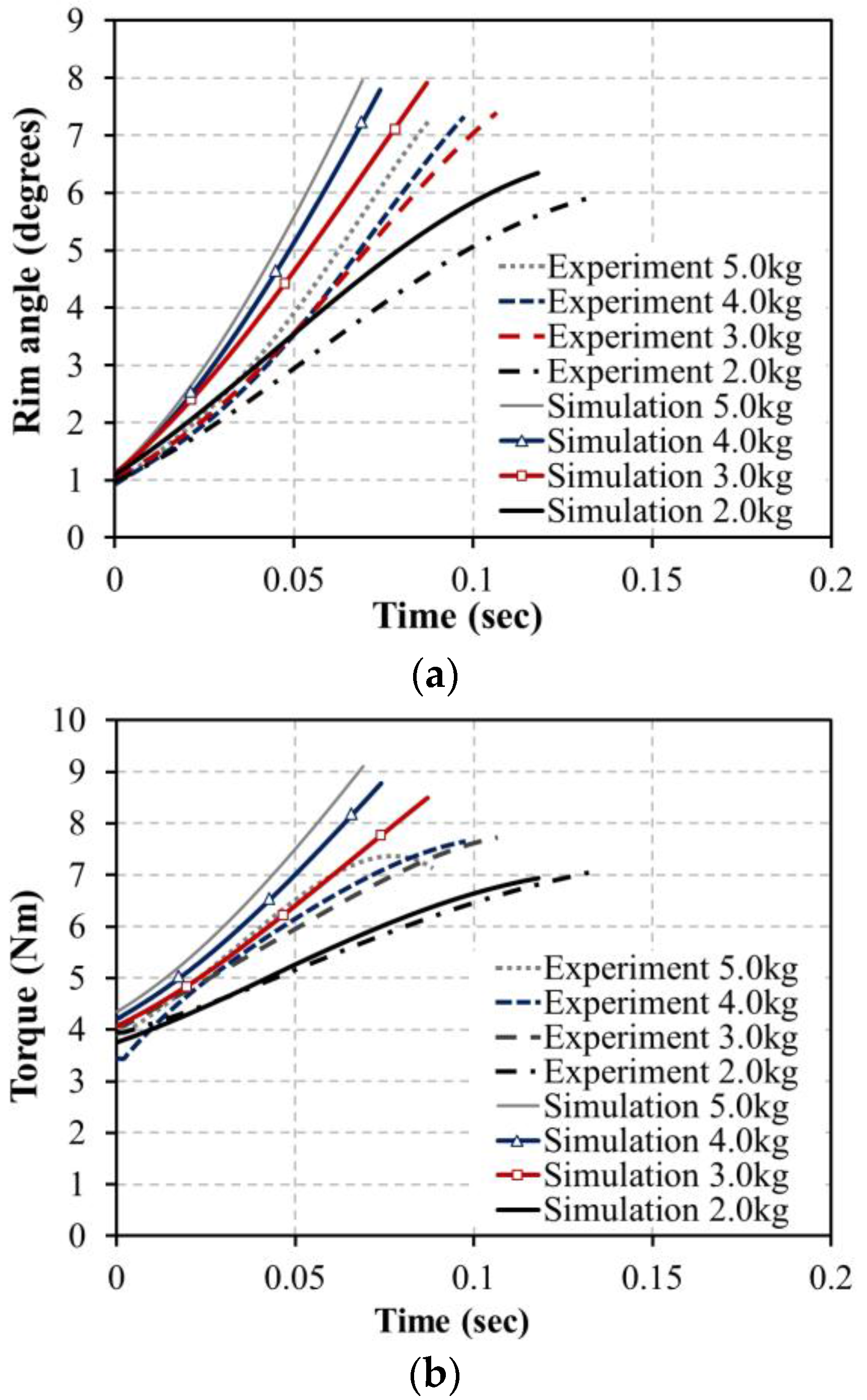
2.2. Generation of the Handrim-Activated Wheelchair Movement
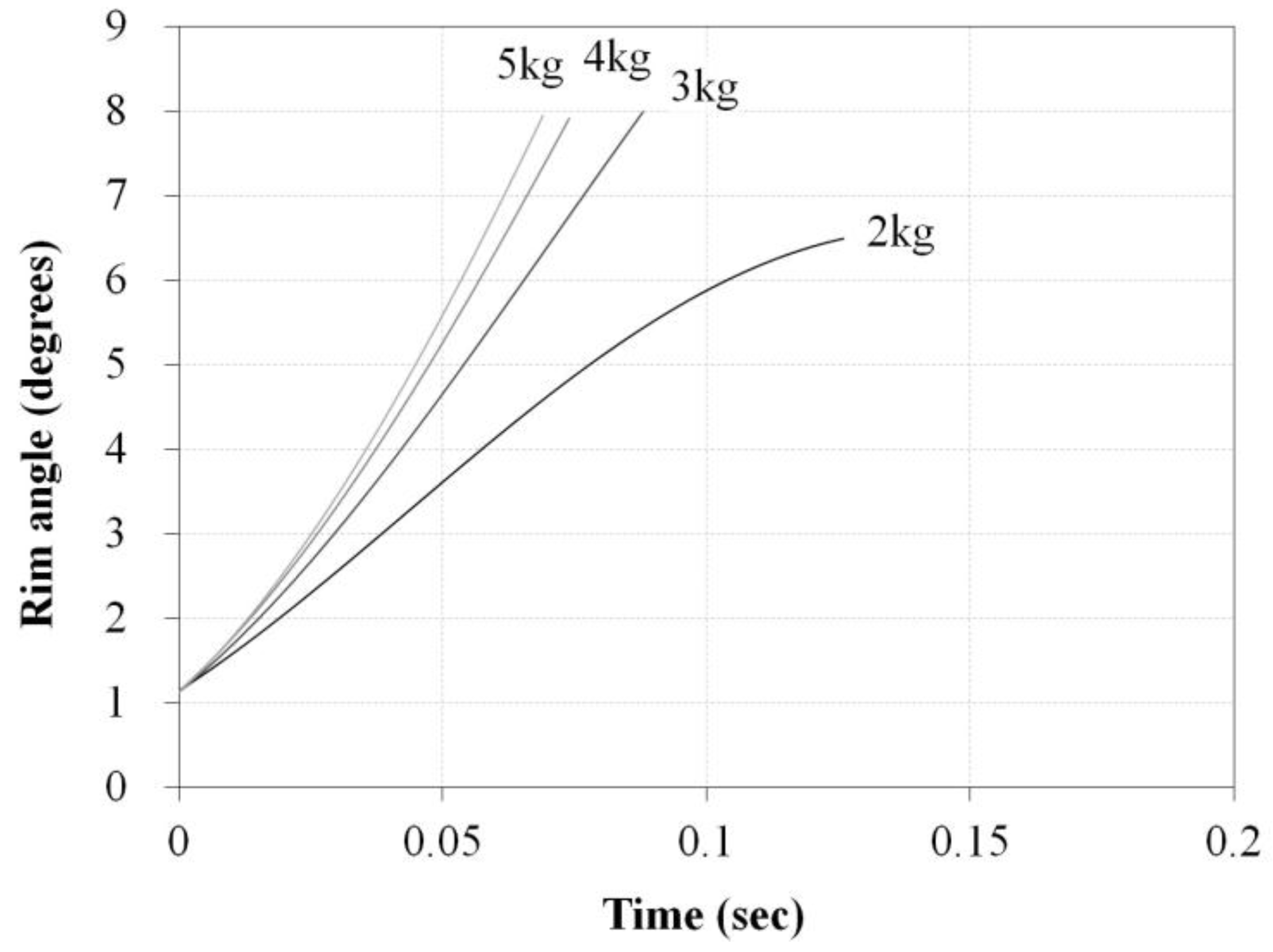
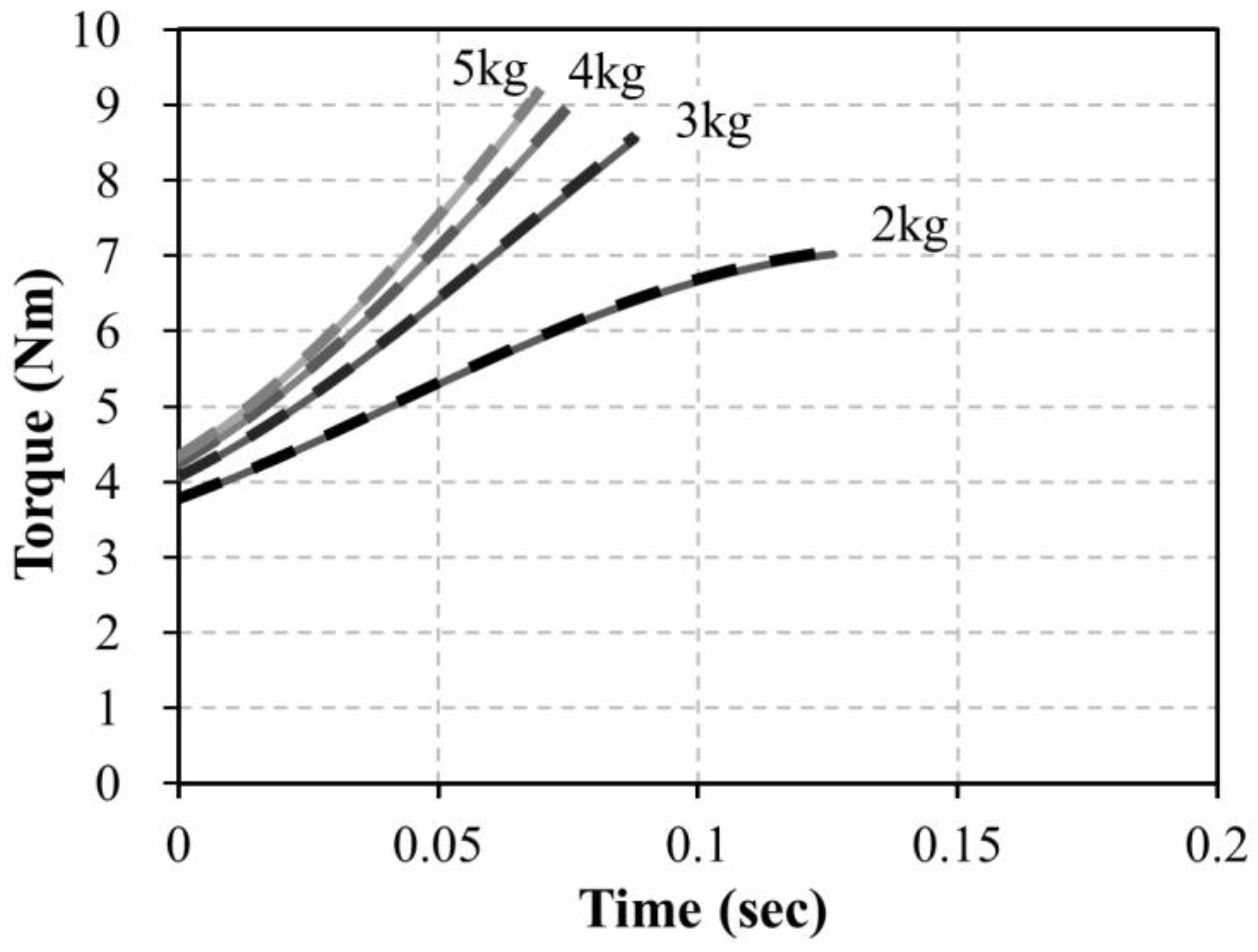
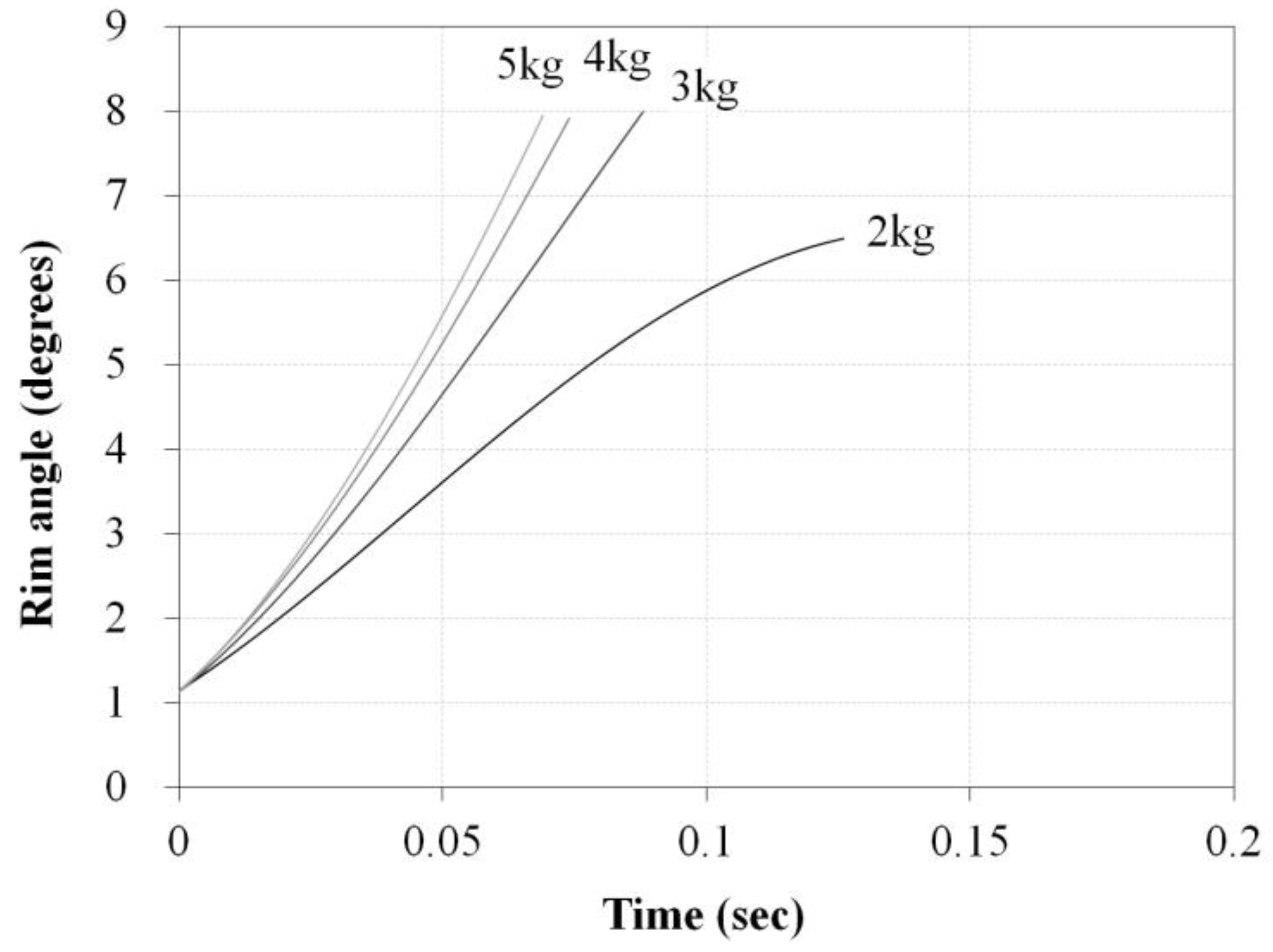
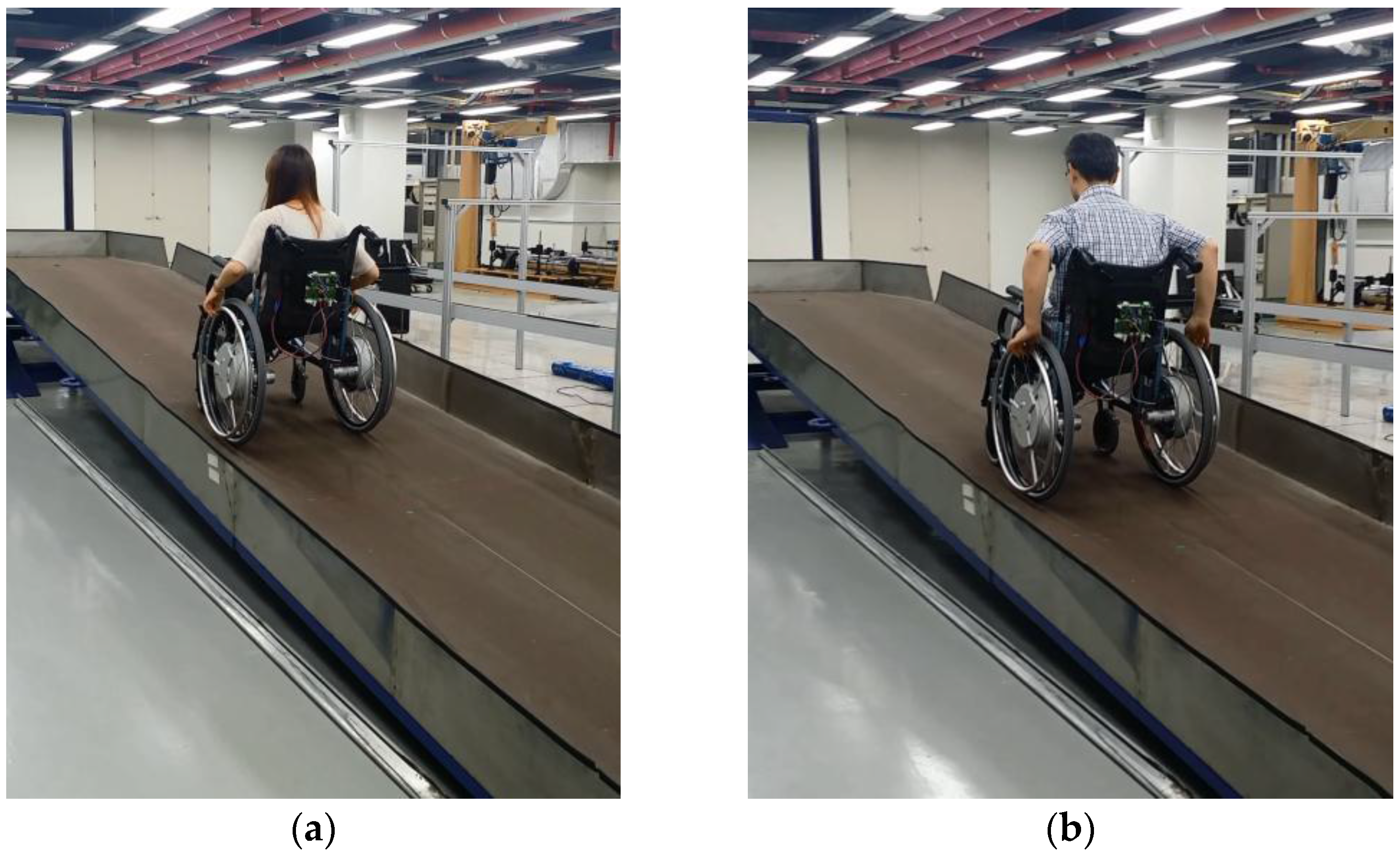
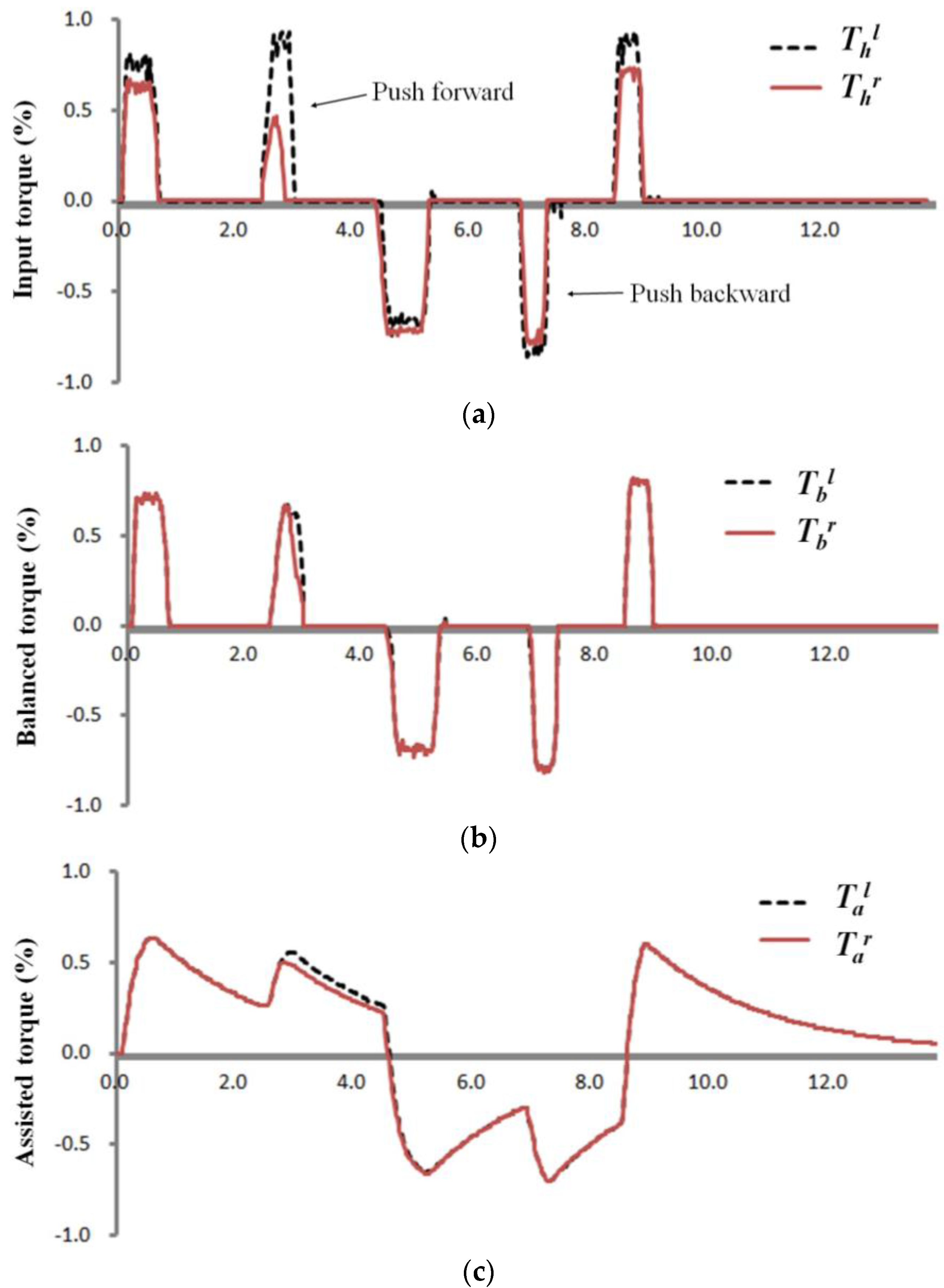
3. Results
4. Discussion
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Guillon, B.; Van-Hecke, G.; Iddir, J.; Pellegrini, N.; Beghoul, N.; Vaugier, I.; Figère, M.; Pradon, D.; Lofaso, F. Evaluation of 3 pushrim-activated power-assisted wheelchairs in Patients with Spinal Cord Injury. Arch. Phys. Med. Rehabil. 2015, 96, 894–904. [Google Scholar] [CrossRef] [PubMed]
- Alber. Available online: http://www.alber.de/en/products.html (accessed on 1 June 2016).
- Levy, C.E.; Buman, M.P.; Chow, J.W.; Tillman, M.D.; Fournier, K.A.; Giacobbi, P., Jr. User of Power Assist-Wheels Results in Increased Distance Traveled Compared to Conventional Manual Wheeling. Am. J. Phys. Med. Rehabil. 2010, 89, 625–634. [Google Scholar] [CrossRef] [PubMed]
- Chien, C.S.; Huang, T.Y.; Liao, T.Y.; Kuo, T.Y.; Lee, T.M. Design and development of solar power-assisted manual/electric wheelchair. J. Rehabil. Res. Dev. 2014, 51, 1411–1426. [Google Scholar] [CrossRef] [PubMed]
- Trujillo-León, A.; Vidal-Verdú, F. Driving Interface based on Tactile Sensors for Electric Wheelchairs or Trolleys. Sensors 2014, 14, 2644–2662. [Google Scholar] [CrossRef] [PubMed]
- Corfman, T.A.; Cooper, R.A.; Boninger, M.L.; Koontz, A.M.; Fitzgerald, S.G. Range of motion and stroke frequency differences between manual wheelchair propulsion and pushrim-activated power-activated wheelchair propulsion. J. Spinal Cord Med. 2003, 26, 135–140. [Google Scholar] [PubMed]
- Nash, M.S.; Koppens, D.; van Haaren, M.; Sherman, A.L.; Lippiatt, J.P.; Lewis, J.E. Power-assisted wheels ease energy costs and perceptual response to wheelchair propulsion in persons with shoulder pain and spinal cord injury. Arch. Phys. Med. Rehabil. 2008, 89, 2080–2085. [Google Scholar] [CrossRef] [PubMed]
- Kloosterman, M.G.; Snoek, G.J.; van der Woude, L.H.; Buurke, J.H.; Rietman, J.S. A systematic review on the pros and cons of using a pushrim-activated power-assisted wheelchair. Clin. Rehabil. 2013, 27, 299–313. [Google Scholar] [CrossRef] [PubMed]
- Tsai, M.C.; Hsueh, P.W. Force sensorless control of power-assisted wheelchair based on motion coordinate transformation. Mechatronics 2013, 23, 1014–1024. [Google Scholar] [CrossRef]
- Oh, S.; Kong, K.; Hori, Y. Design and analysis of force-sensor-less power-assist control. IEEE Trans. Ind. Electron. 2014, 61, 985–993. [Google Scholar] [CrossRef]
- Medola, F.O.; Dao, P.V.; Caspall, J.J.; Sprigle, S. Partitioning kinetic energy during freewheeling wheelchair maneuvers. IEEE Trans. Neural Syst. Rehabil. Eng. 2014, 22, 326–333. [Google Scholar] [CrossRef] [PubMed]
- Caspall, J.J.; Seligsohn, E.; Dao, P.V.; Sprigle, S. Changes in inertia and effect on turning effort across different wheelchair configurations. J. Rehabil. Res. Dev. 2013, 50, 1353–1362. [Google Scholar] [CrossRef] [PubMed]
- Heo, Y.; Hong, E.P.; Mun, M.S.; Choi, T.H. Torque Balancing for Power Assisted Wheelchair based on Torque and Temporal Similarity. Int. J. Precis. Eng. Manuf. 2015, 16, 1729–1734. [Google Scholar] [CrossRef]
- Seki, H.; Sugimoto, T.; Tadakuma, S. Straight and circular road driving control of power assisted wheelchair based on balanced assist torque. In Proceedings of the 31st Annual Conference of IEEE Industrial Electronics Society, Raleigh, NC, USA, 6–10 November 2005; pp. 451–456.
- Seki, H.; Tanohata, N. Fuzzy Control for Electric Power-Assisted Wheelchair Driving on Disturbance Roads. IEEE Trans. Syst. Man. Cybern. 2012, 42, 1624–1632. [Google Scholar] [CrossRef]
- Lee, K.M.; Lee, C.H.; Hwang, S.; Choi, J.; Bang, Y.B. Power-assisted wheelchair with gravity and friction compensation. IEEE Trans. Ind. Electron. 2016, 63, 2203–2211. [Google Scholar] [CrossRef]
- Shibata, T.; Murakami, T. Power-assist control of pushing task by repulsive compliance control in electric wheelchair. IEEE Trans. Ind. Electron. 2011, 59, 511–520. [Google Scholar] [CrossRef]
- Tolerico, M.L.; Ding, D.; Cooper, R.A.; Spaeth, D.M.; Fitzgerald, S.G.; Cooper, R.; Kelleher, A.; Boninger, M.L. Assessing mobility characteristics and activity levels of manual wheelchair users. J. Rehabil. Res. Dev. 2007, 44, 561–572. [Google Scholar] [CrossRef] [PubMed]
- Boninger, M.L.; Baldwin, M.; Cooper, R.A.; Koontz, A.; Chan, L. Manual wheelchair pushrim biomechanics and axle position. Arch. Phys. Med. Rehabil. 2000, 81, 608–613. [Google Scholar] [CrossRef]
- Maxmobility. Available online: http://www.max-mobility.com/smartdrive/#mx2 (accessed on 1 June 2016).
- Pavlidou, E.; Kloosterman, M.G.; Buurke, J.H.; Rietman, J.S.; Janssen, T.W. Rolling resistance and propulsion efficiency of manual and power-assisted wheelchairs. Med. Eng. Phys. 2015, 37, 1105–1110. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wheel Diameter | 24 inch | |
| DC Motor | Rated Power | 80 W |
| Rated Speed | 7000 rpm | |
| Weight | 1 kg | |
| Gear Ratio | 1/115 | |
| Max. Wheel Speed | 61 rpm | |
| Battery | 24 V, 8 Ah | |
| Max. HAPAW Speed | 6 km/h | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nam, K.-T.; Jang, D.-J.; Kim, Y.C.; Heo, Y.; Hong, E.-P. A Study of a Handrim-Activated Power-Assist Wheelchair Based on a Non-Contact Torque Sensor. Sensors 2016, 16, 1251. https://doi.org/10.3390/s16081251
Nam K-T, Jang D-J, Kim YC, Heo Y, Hong E-P. A Study of a Handrim-Activated Power-Assist Wheelchair Based on a Non-Contact Torque Sensor. Sensors. 2016; 16(8):1251. https://doi.org/10.3390/s16081251
Chicago/Turabian StyleNam, Ki-Tae, Dae-Jin Jang, Yong Chol Kim, Yoon Heo, and Eung-Pyo Hong. 2016. "A Study of a Handrim-Activated Power-Assist Wheelchair Based on a Non-Contact Torque Sensor" Sensors 16, no. 8: 1251. https://doi.org/10.3390/s16081251
APA StyleNam, K.-T., Jang, D.-J., Kim, Y. C., Heo, Y., & Hong, E.-P. (2016). A Study of a Handrim-Activated Power-Assist Wheelchair Based on a Non-Contact Torque Sensor. Sensors, 16(8), 1251. https://doi.org/10.3390/s16081251