
A Semantic Approach with Decision Support for Safety Service in Smart Home Management


Abstract
:1. Introduction
2. Related Work
- -
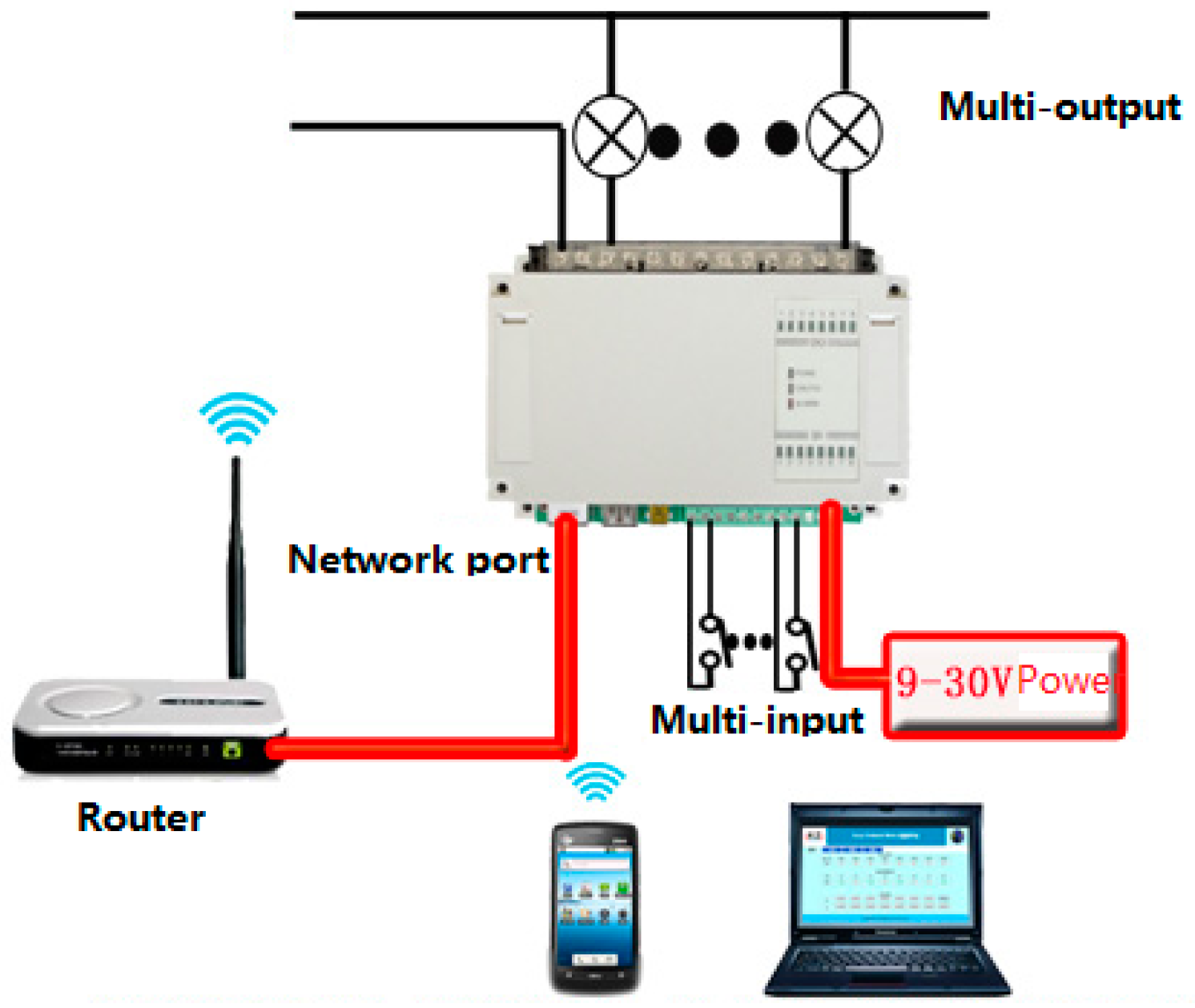
- Data acquisition and communication;
- -
- Data process and context aware;
- -
- Context reasoning and decision support.
3. Physical and Methodological Realization of the SH Management System
- Clear expression of the risk situation in daily life without any ambiguity;
- Accurate contextual reasoning about temporary potential risk based on knowledge;
- Dynamic decision support for safety services;
- Accuracy in task scheduling and execution.
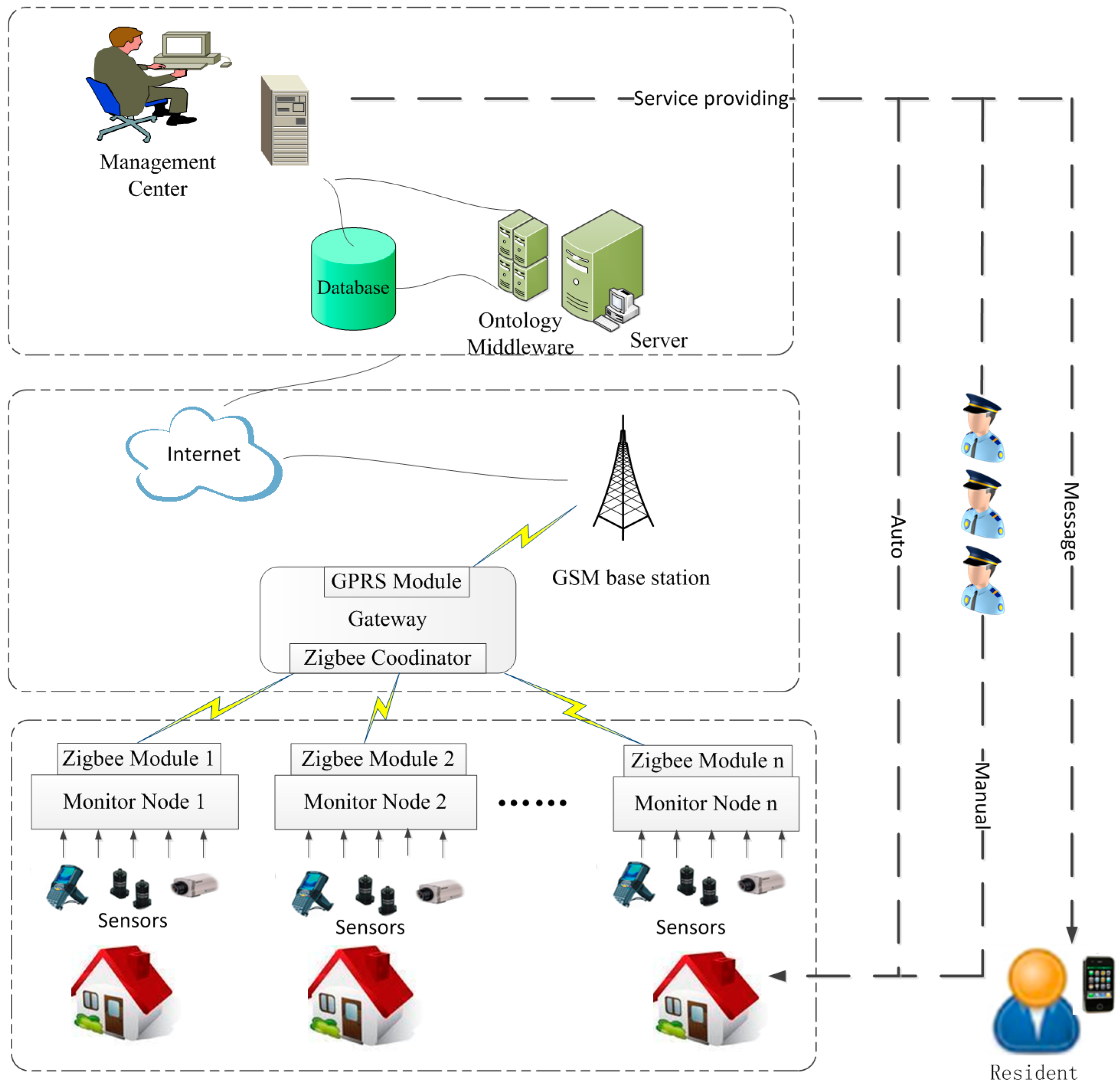
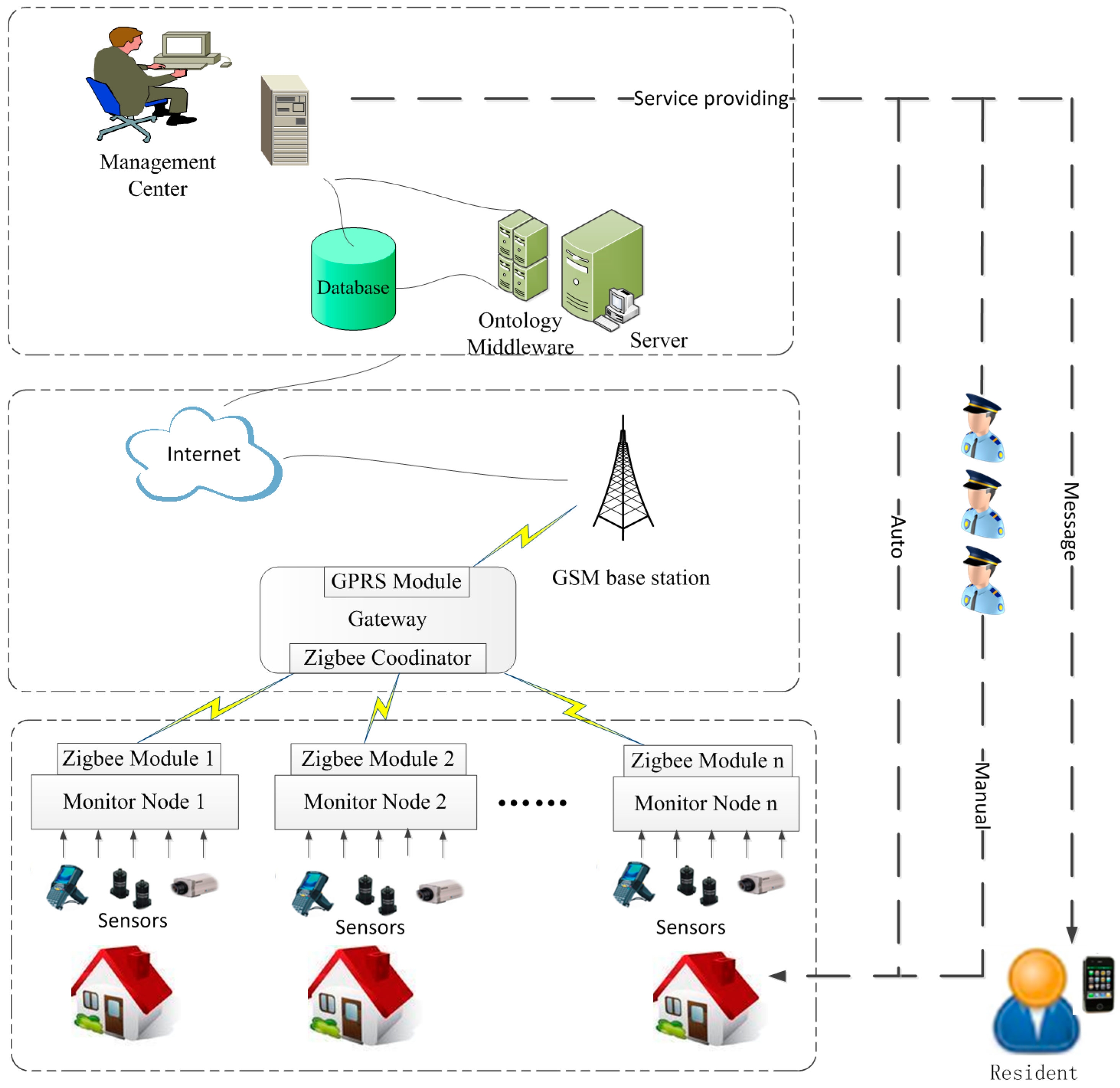
3.1. The Framework of the SH Management System
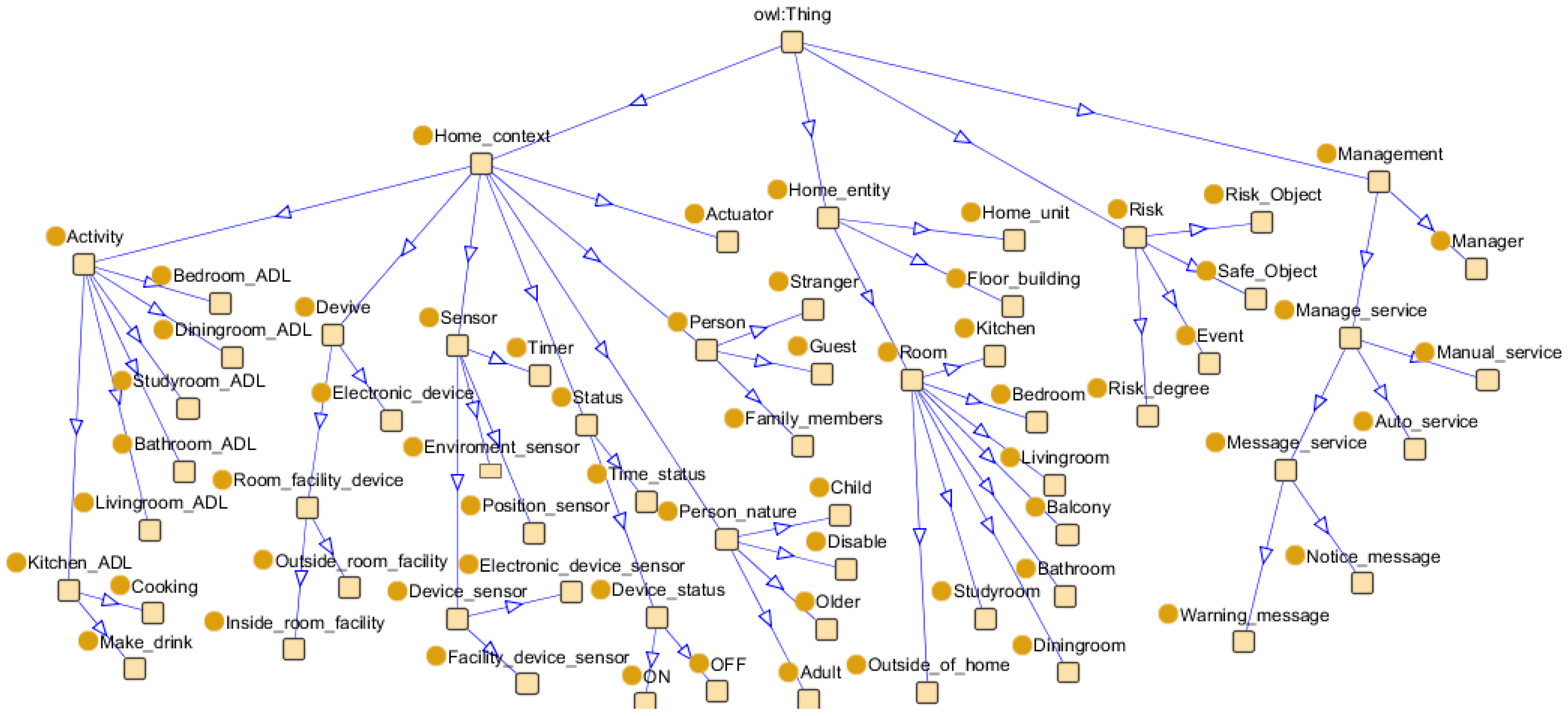
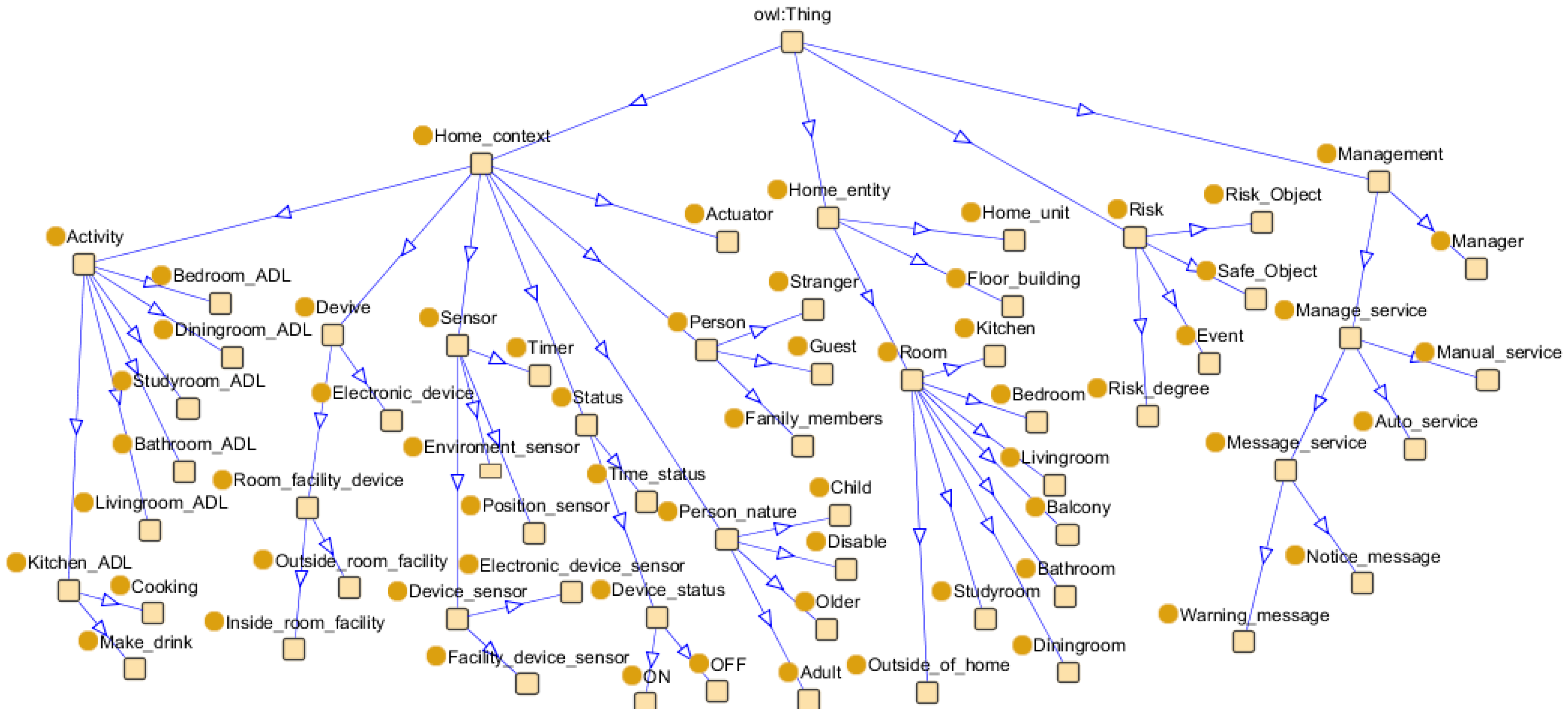
3.2. Ontology Model for the System
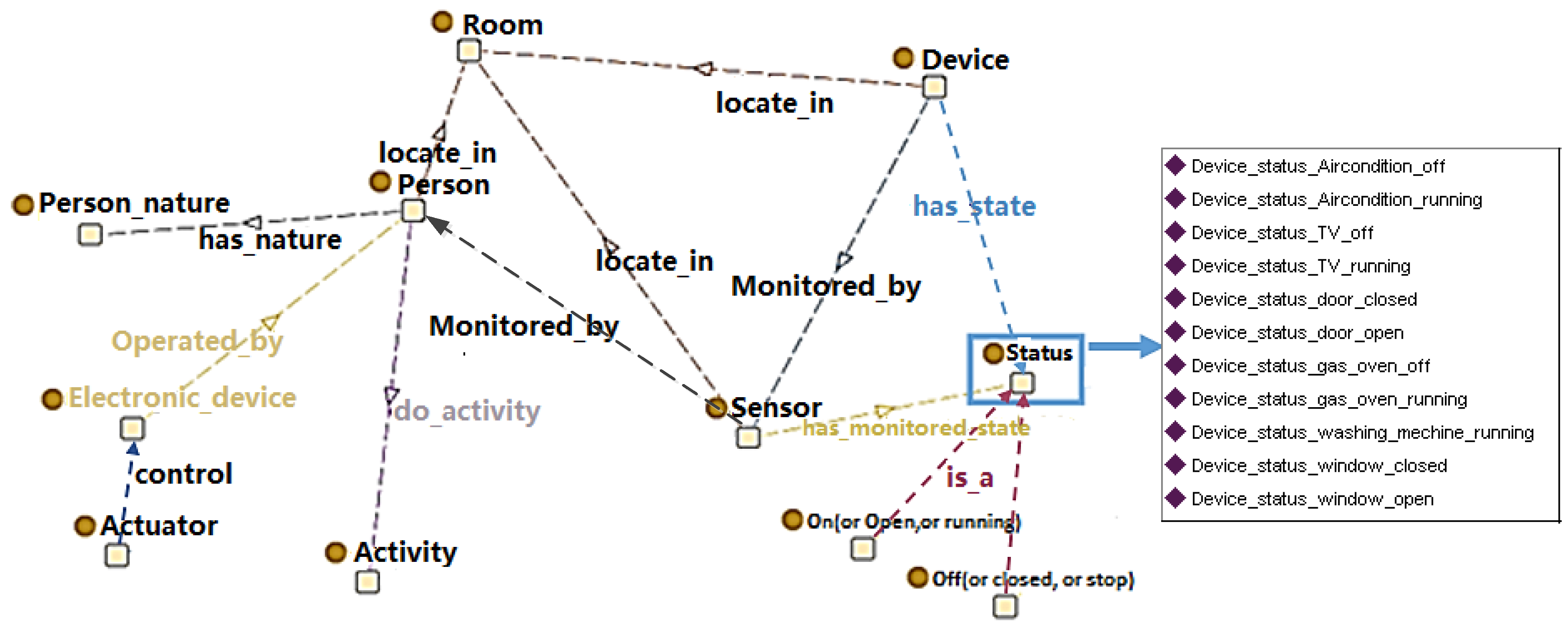
- A home context perspective. With a focus on contextual information about SH, home context includes devices and their monitoring sensors, residents and their current state (on, off, time interval). Their relationships are defined, for instance, residents “locate_in”room.
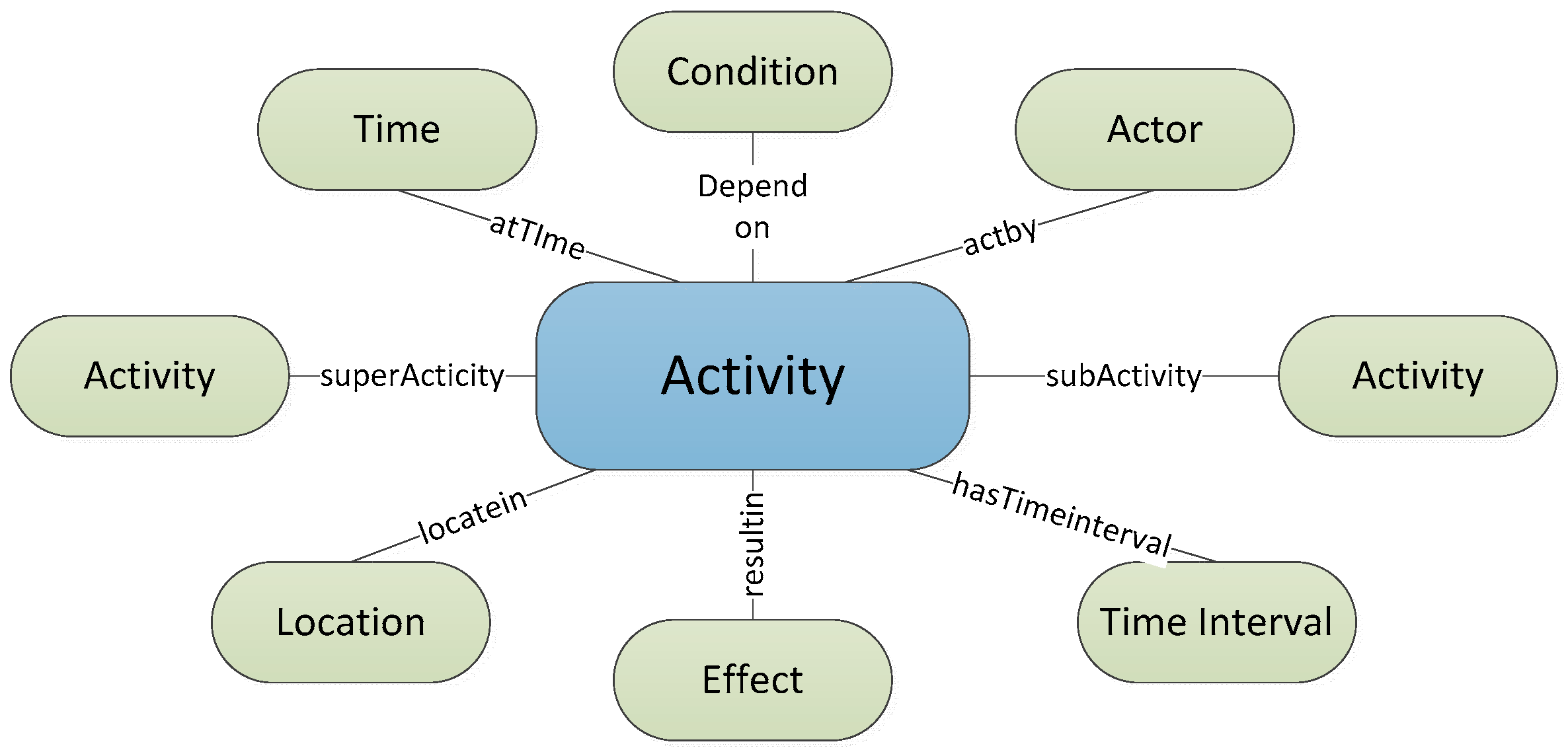
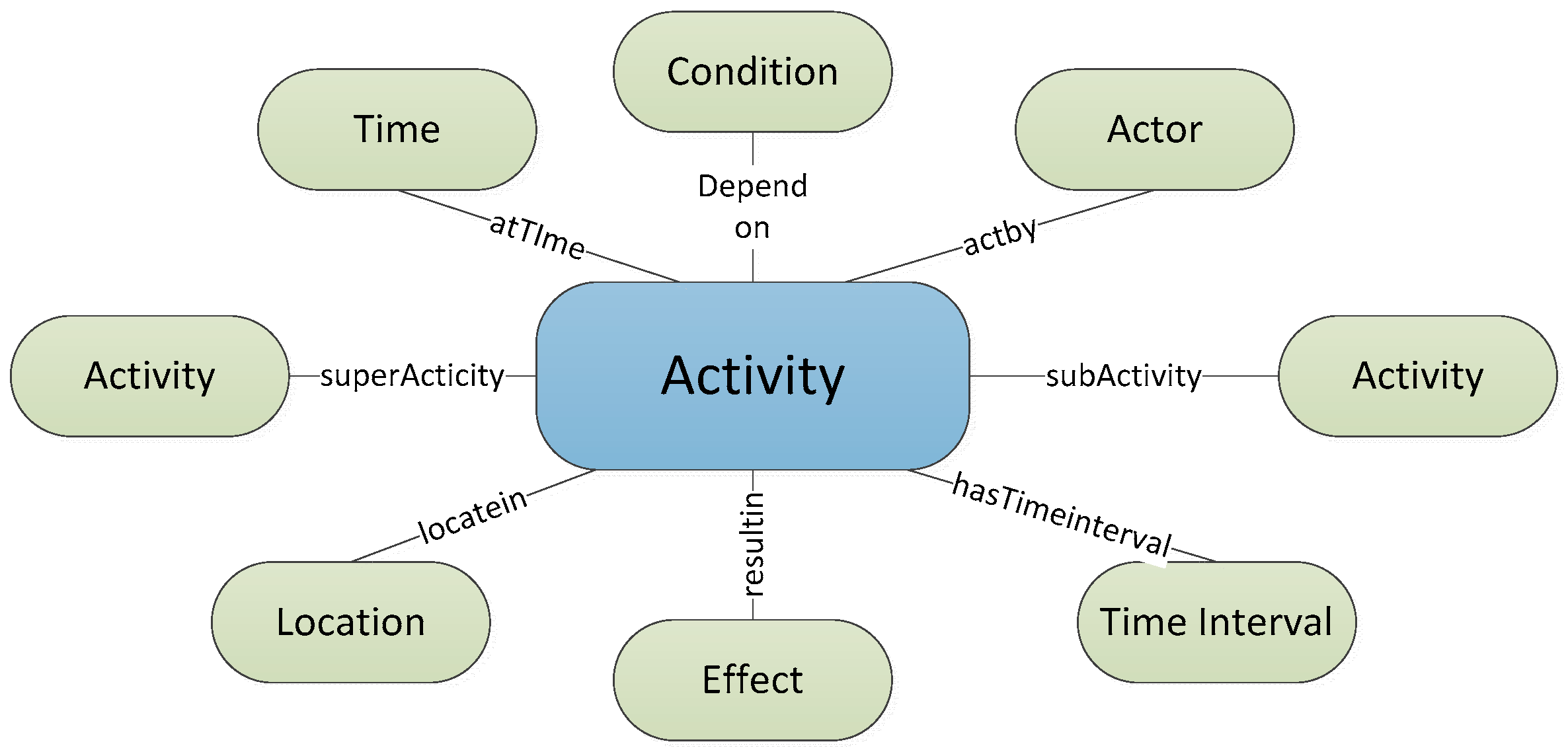
- Person activity. Activities are the explicit representation of a hierarchy of activities that consists of activity types and their relationships in a problem domain. Activities in ontologies are modeled not only based on objects, environmental elements and events but also the interrelationships between them, such as “is_a” or “part_of” relationships [18].
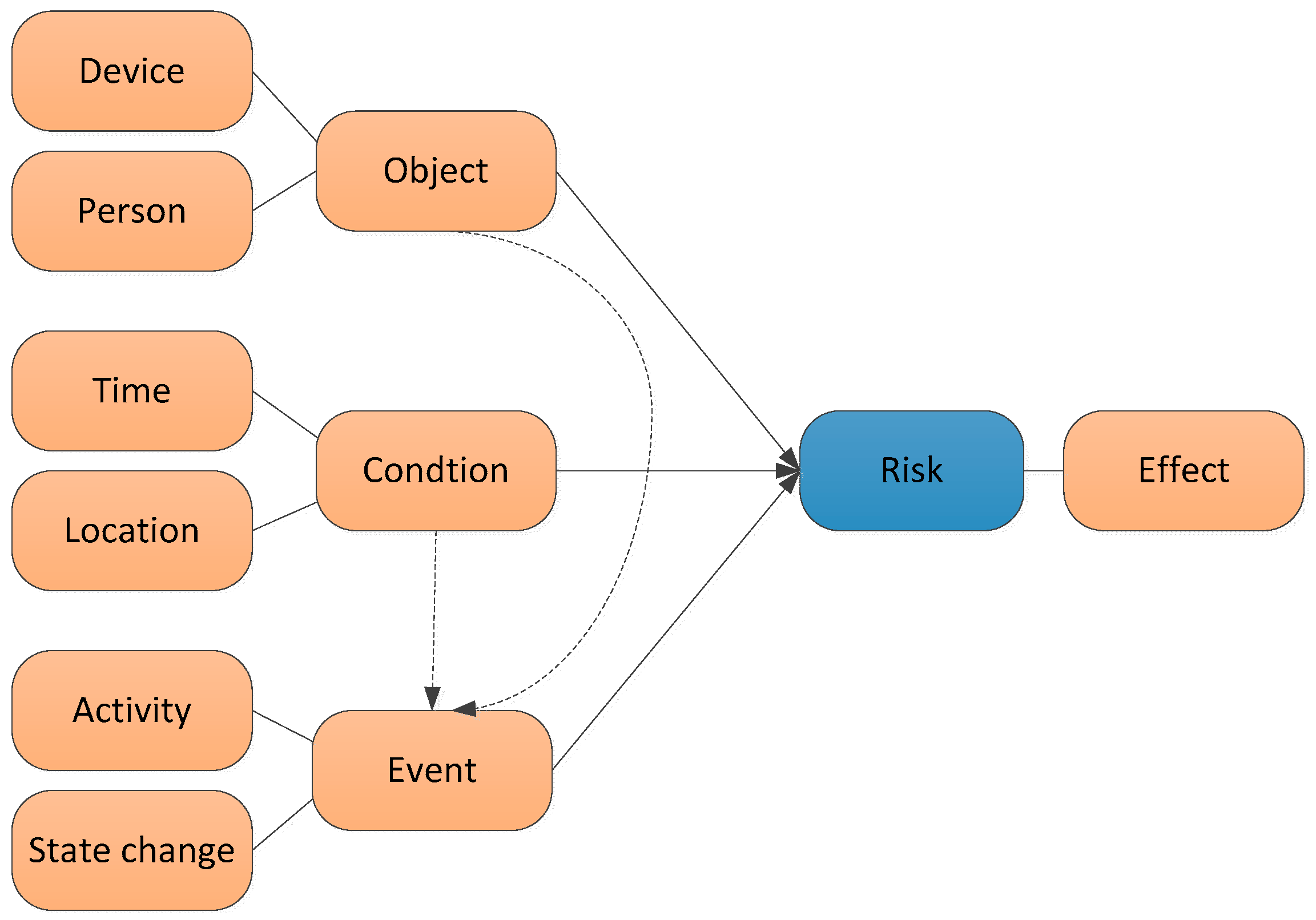
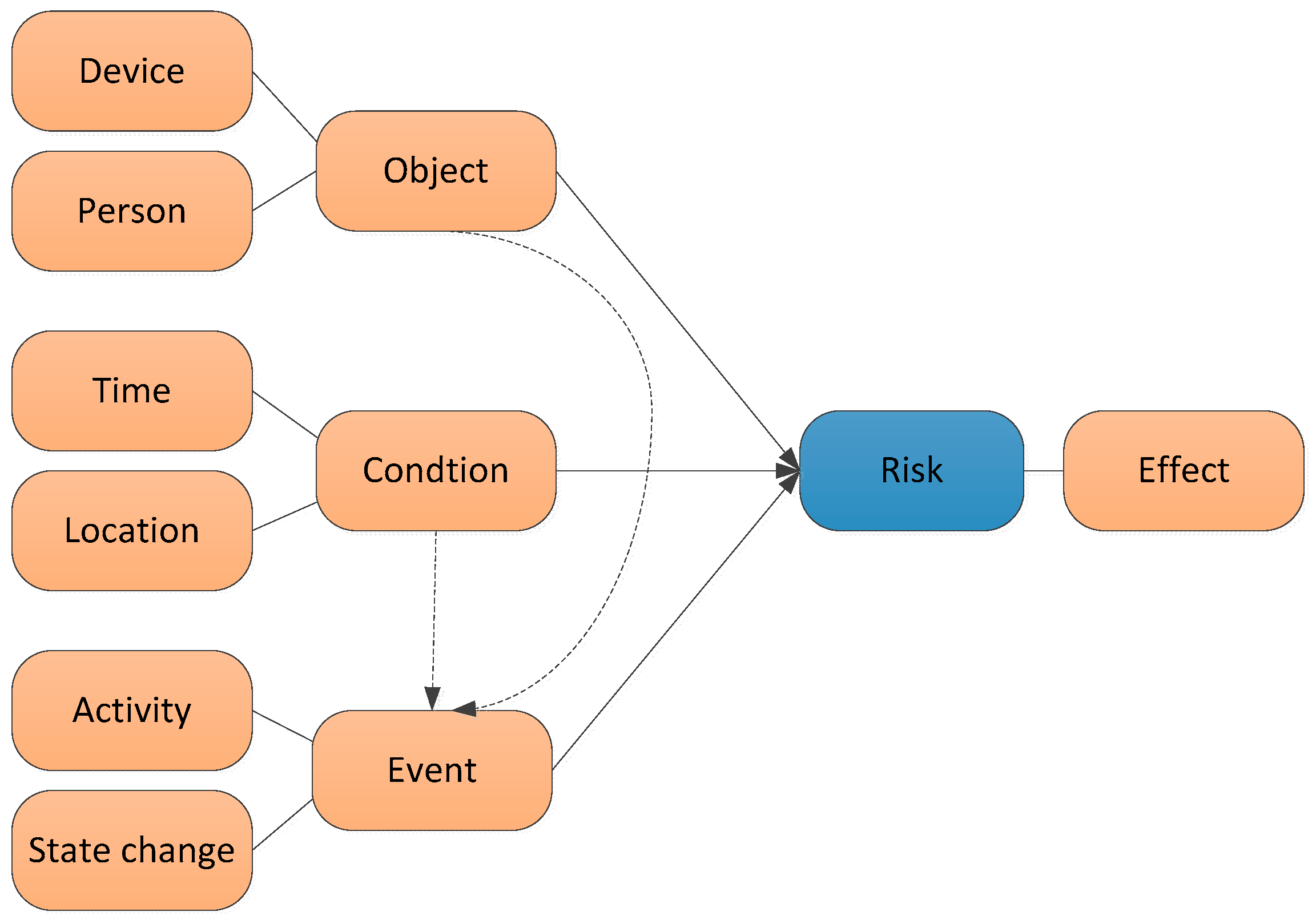
- Risk perspective, with a focus on the elements related to a risk situation (object, event, condition) and classifies the degree of risk.
- Service perspective, with a focus on the services provided (who provides the service, who receives the service and what is the content of the service).
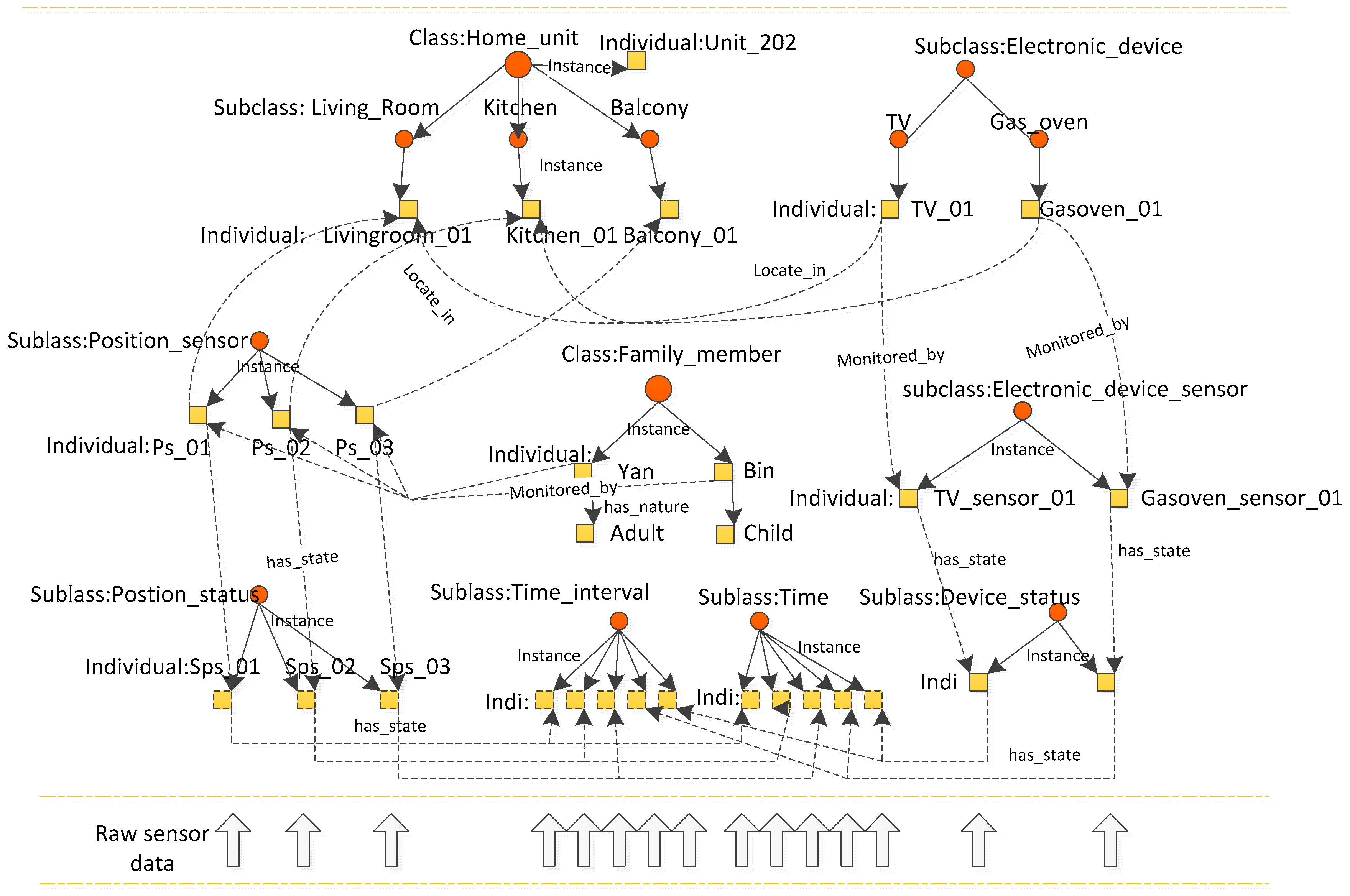
3.2.1. Home Context Perspective
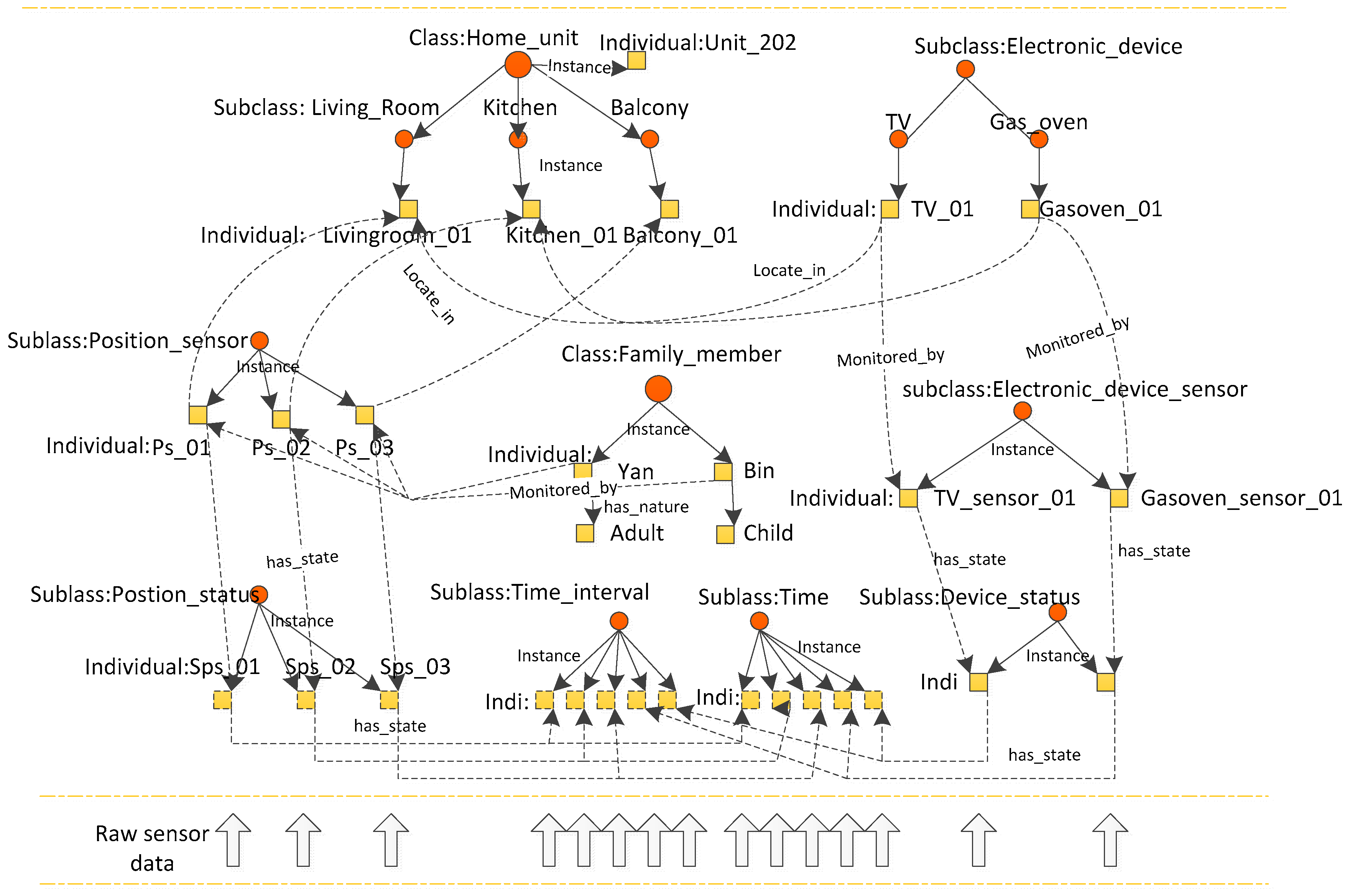
- Sensors and their monitored device: The “Device” class, the “Sensor” class and the “Actuator” class are defined as a subclass of “Home_context”. We learn some expression pattern of sensors for measurement processes, observations and deployment in SSN ontology [31]. The “Device” class expresses the types of device that are used at home. We classify devices as electrical devices, which include electrical equipment at home, such as TV, washing machine, air conditioner or microwave oven; facility devices, which include other types of facilities at home which are not electrically driven, such as sofa, bed, windows and doors; and unfixed facilities, such as bed and soft, or cup and bowl. The “Sensor” class defines various sensors that are used to “sense” devices at home. It monitors the state of devices, such as on/off (electrical device) or open/closed (facility device). Operating time is monitored by timer sensors. Thus, a property “monitored_by” is defined to link the “Device” class and the “Sensor” class. The “Actuator” class is used to define the actuators which could control the running state of electronic device. It is linked to “Electronic_device” class with an “acting” property.
- Person and person’s attribute: The “Person” class is used to identify the person at home. It defines a person as a family member, a guest or a stranger. The “Person_nature” class is used to define the characteristics of different persons. It has subclasses, namely, “Adult”, “Child”, “Older” and “Disabled”. The “has_nature” property links the “Person” class to the “Person_nature” class. One person may have multiple natures. For example, a person may be older and disabled. A datatype property “Person_information”, which has the subproperties “Name”, “Age”, “Sex” and “Tel”, is attached to the “Person” class.
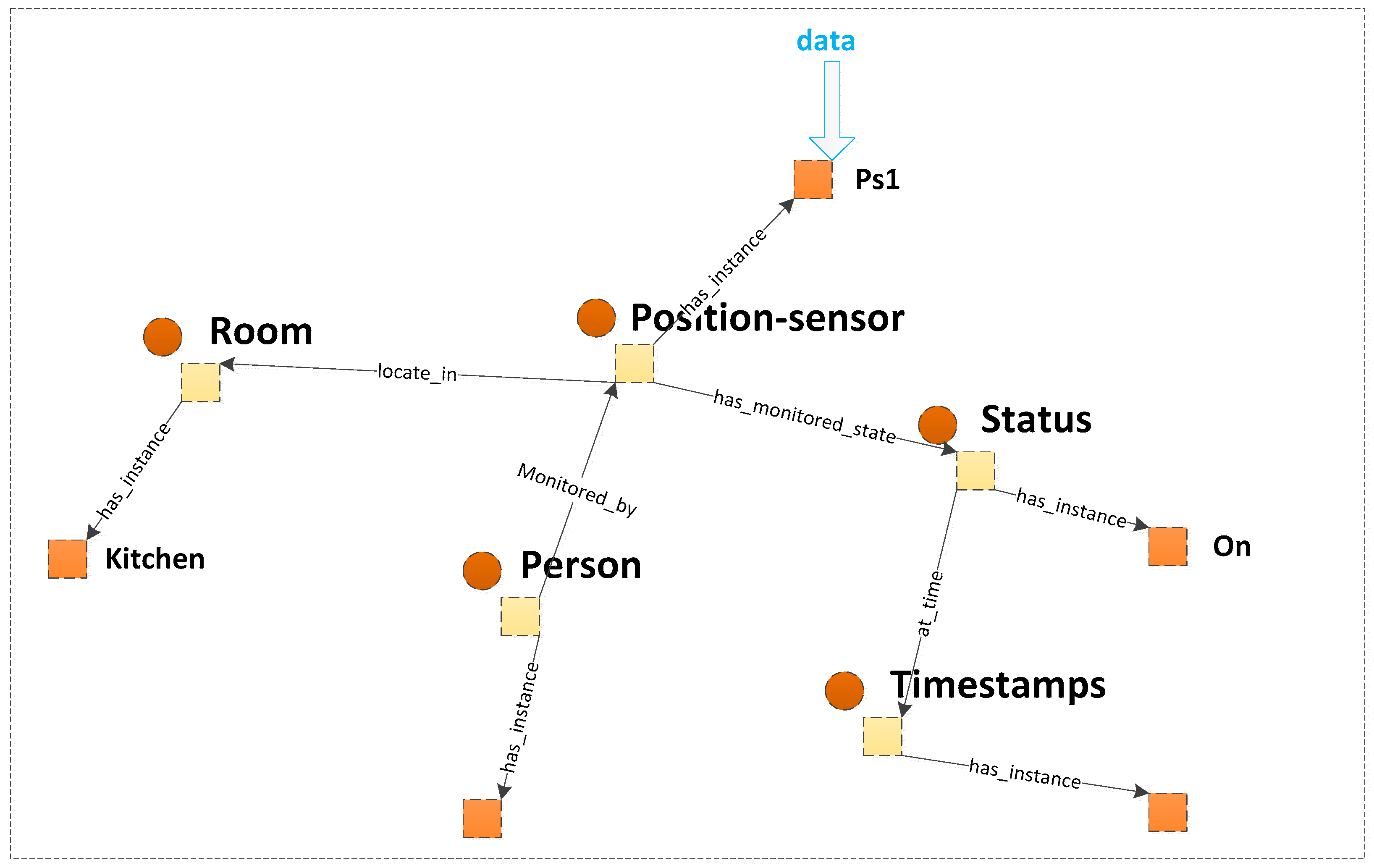
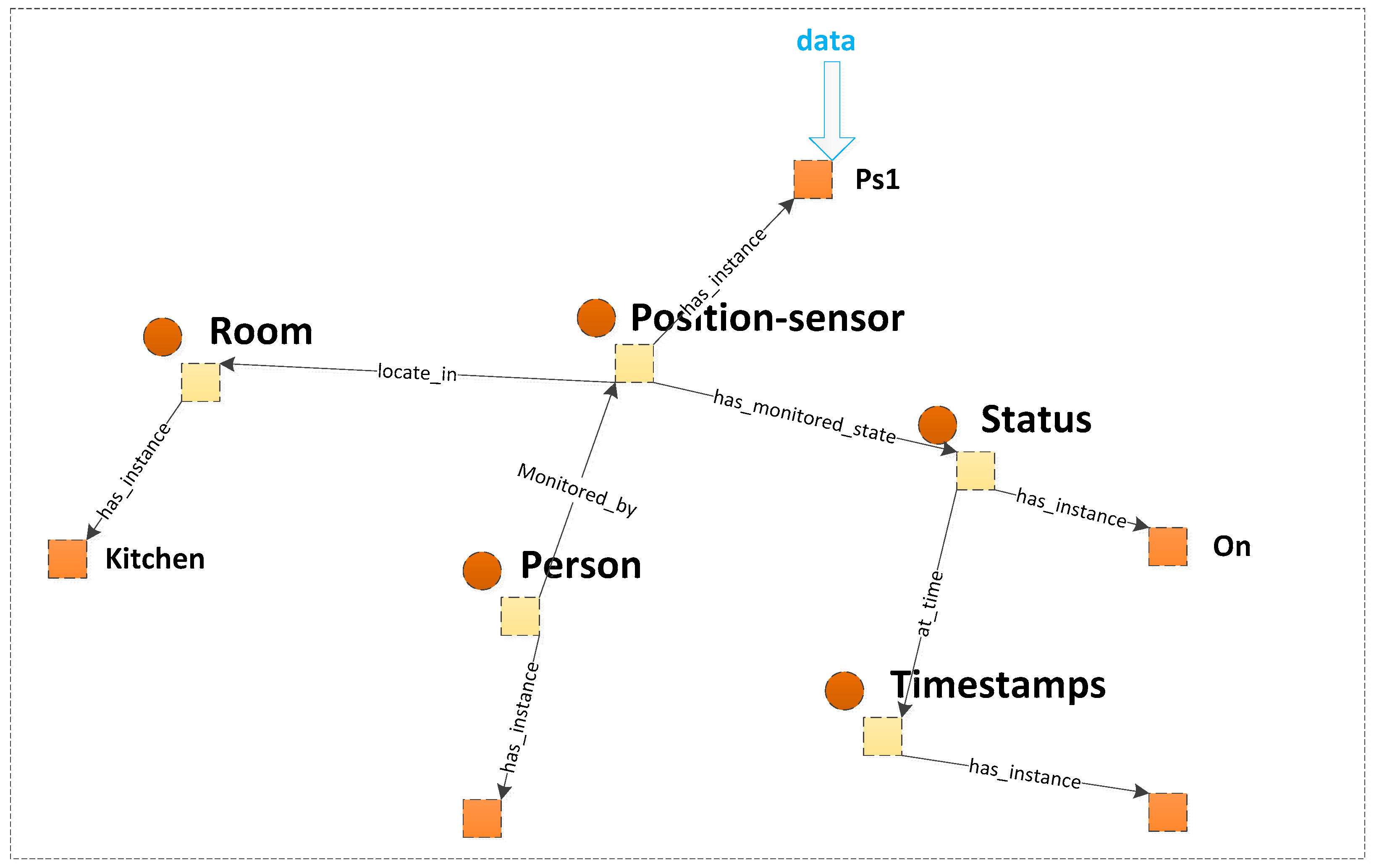
- State: We define the state as a snapshot of behaviour of a device or a person in SH at a specific time window. To indicate the monitored state, the “Status” class is defined, which is linked by the property “has_monitored_state” to the “Sensor” class and determines the sensing results. Several instances are created to describe the state of devices, such as “Device_status_door_closed” or “Device_status_gas_oven_running” (Figure 3). The “locate_ in” property links the “Person”, “Device” and “Sensor” classes to the “Room” class and indicates their position. The position of a person changes, which is monitored by position sensors.
- Activity: The “Activity” class expresses the action of a person. The activity cannot be directly identified by sensors. However, an activity is related to contextual entities, e.g., person, location, objects, sensor observations, etc. Beside the instance mentioned in Section 3.2, some specific situations that correspond to an unknown activity could be reached by aggregating sensor observations along a time line.
3.2.2. Activity Perspective
3.2.3. Risk Perspective
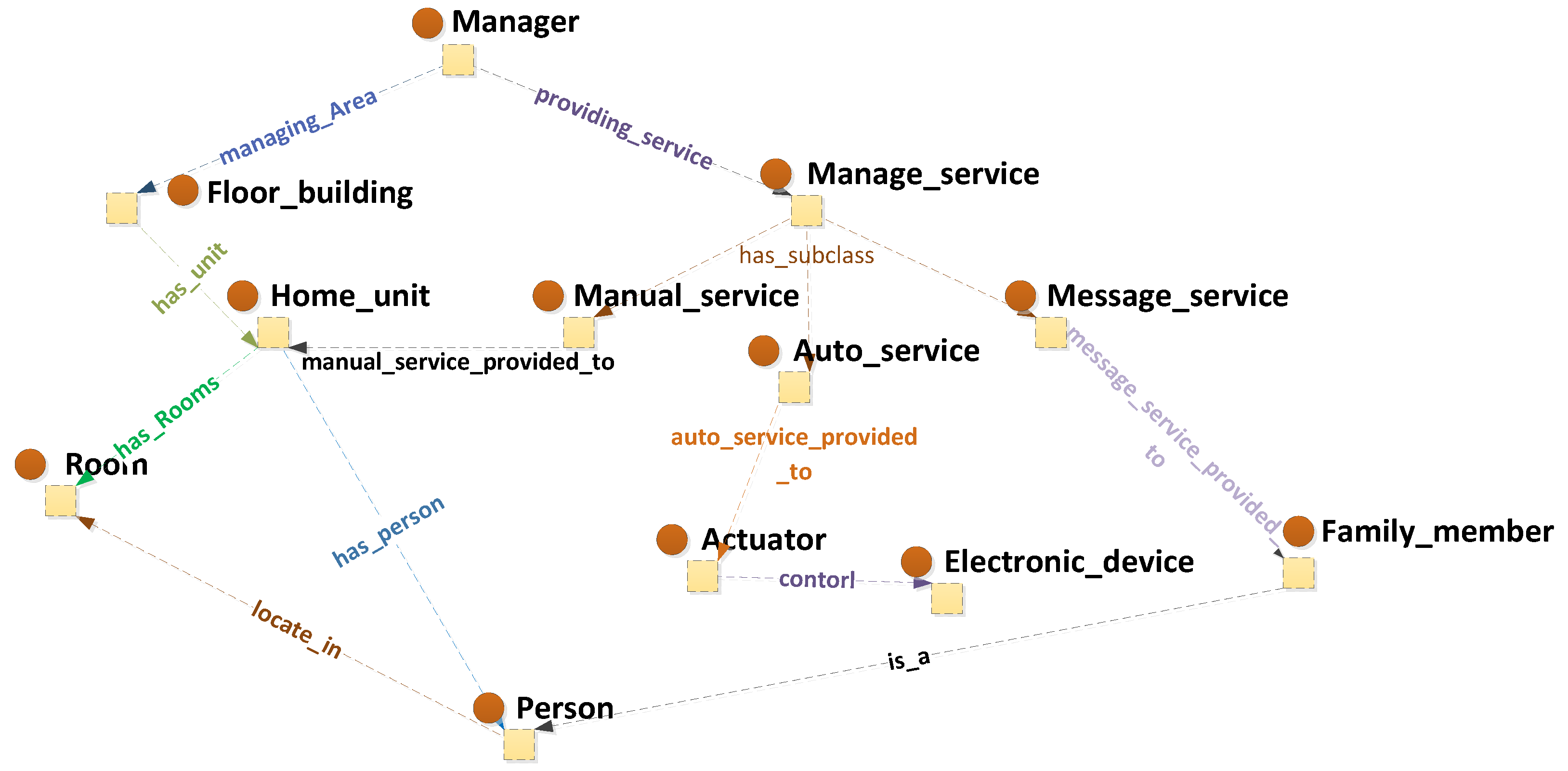
3.2.4. Service Perspective
4. Reasoning Method
- (1)
- Contextual information awareness: the raw data of SH are formed as formatted contextual information with semantic knowledge which is defined as low level context.
- (2)
- Daily activity recognition based on basic contextual information.
- (3)
- Risk detected and associated to a risk degree.
- (4)
- Decision support for the service provision (such as send an alert about the risk event) and updated service with the degree of risk of the detected risk.
- (5)
- Steps repeated until the risk detected has been eliminated.
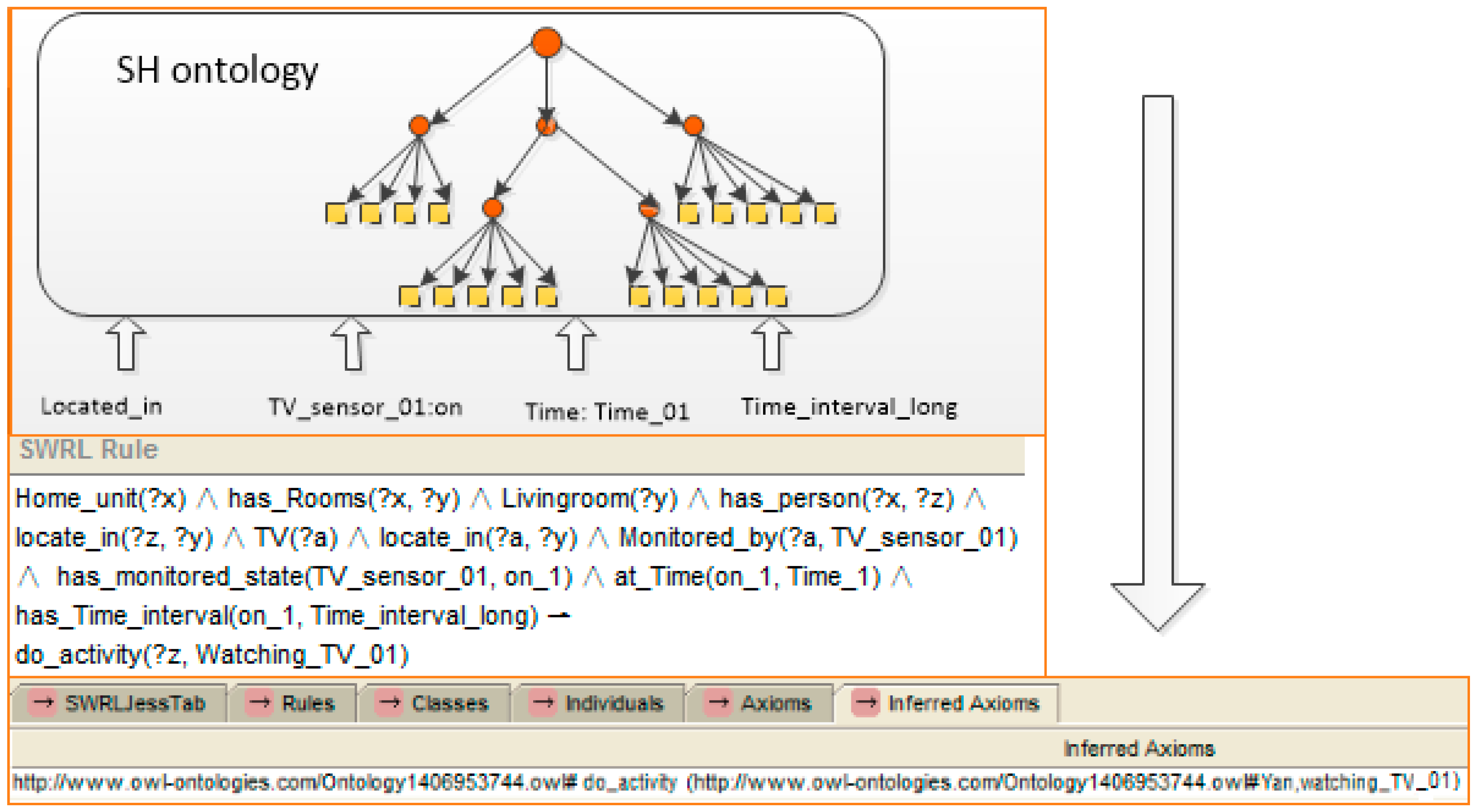
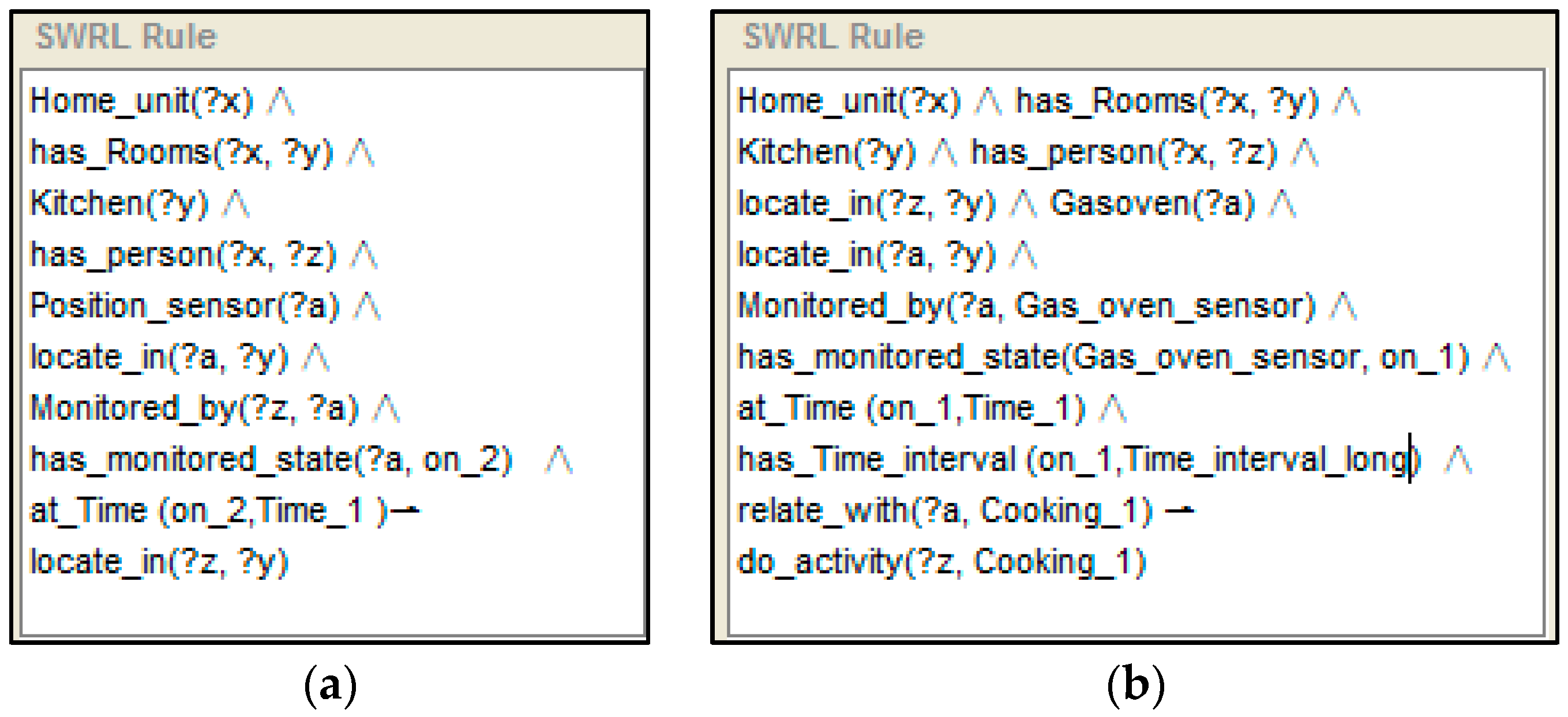
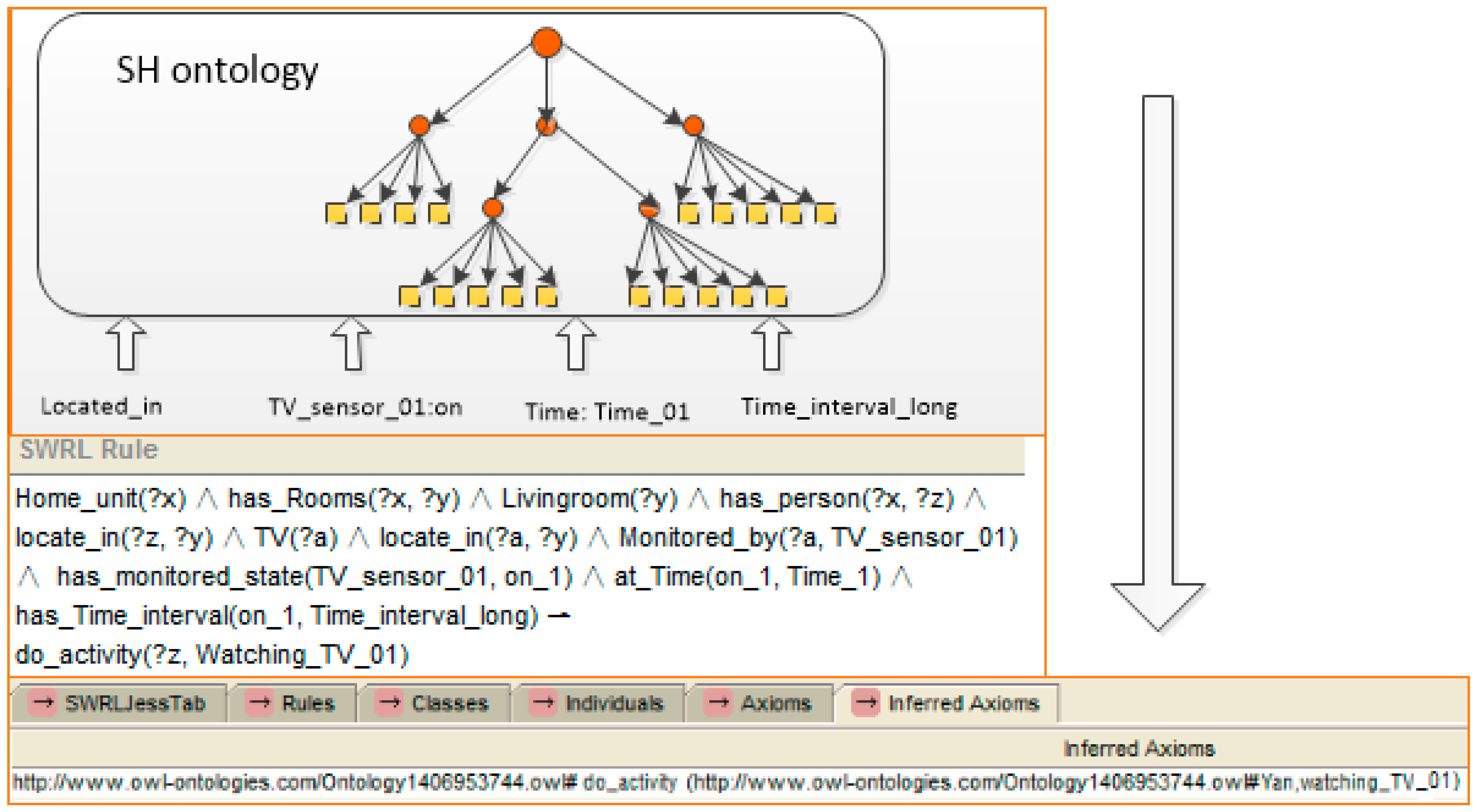
4.1. Daily Activity Recognition
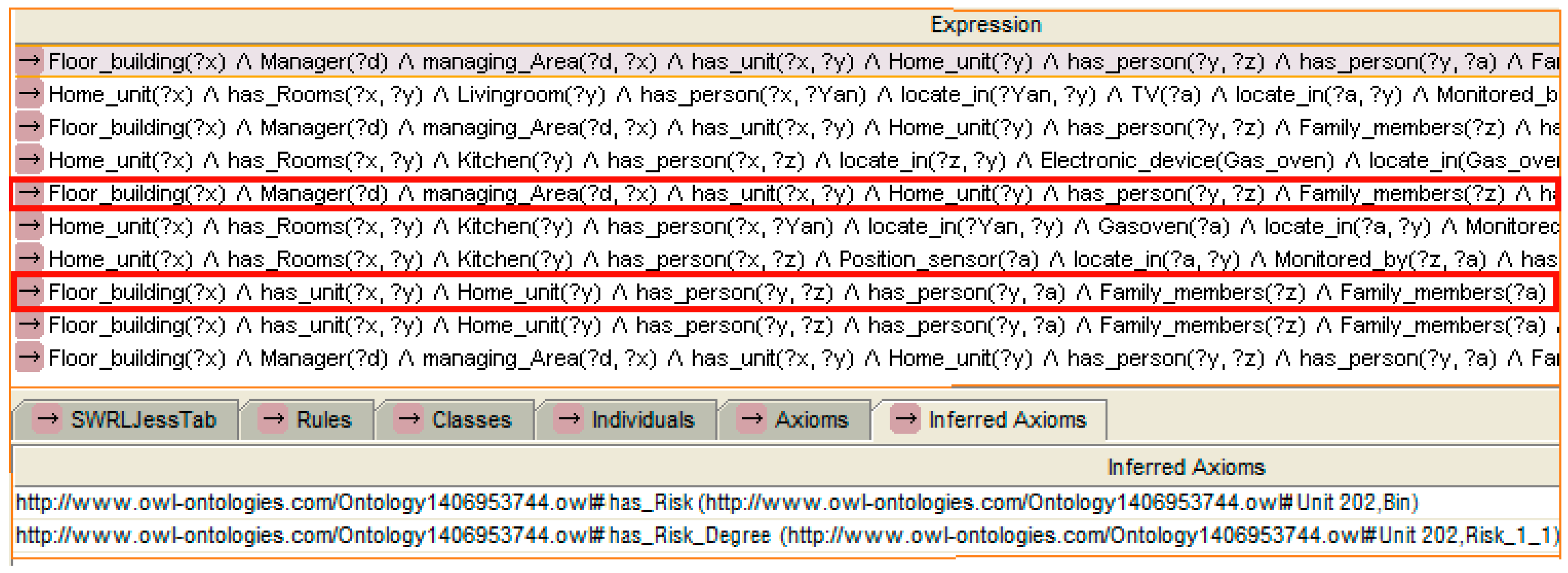
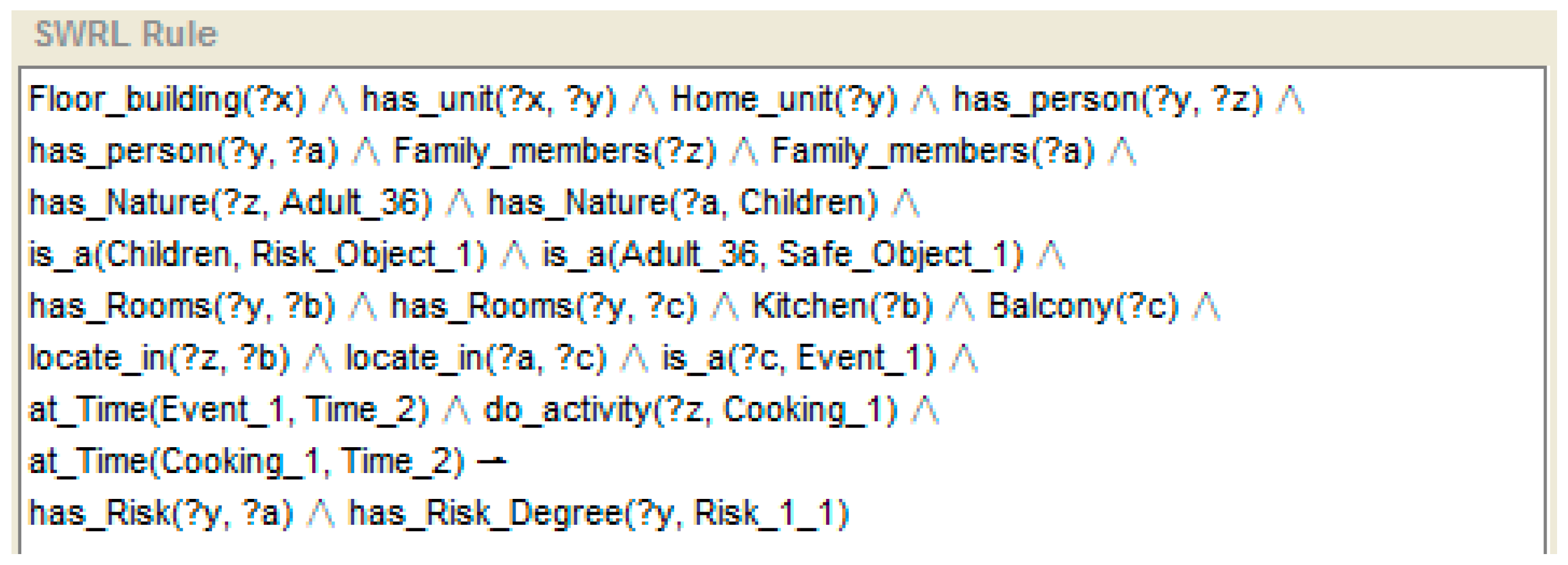
4.2. Risk Situation Recognition
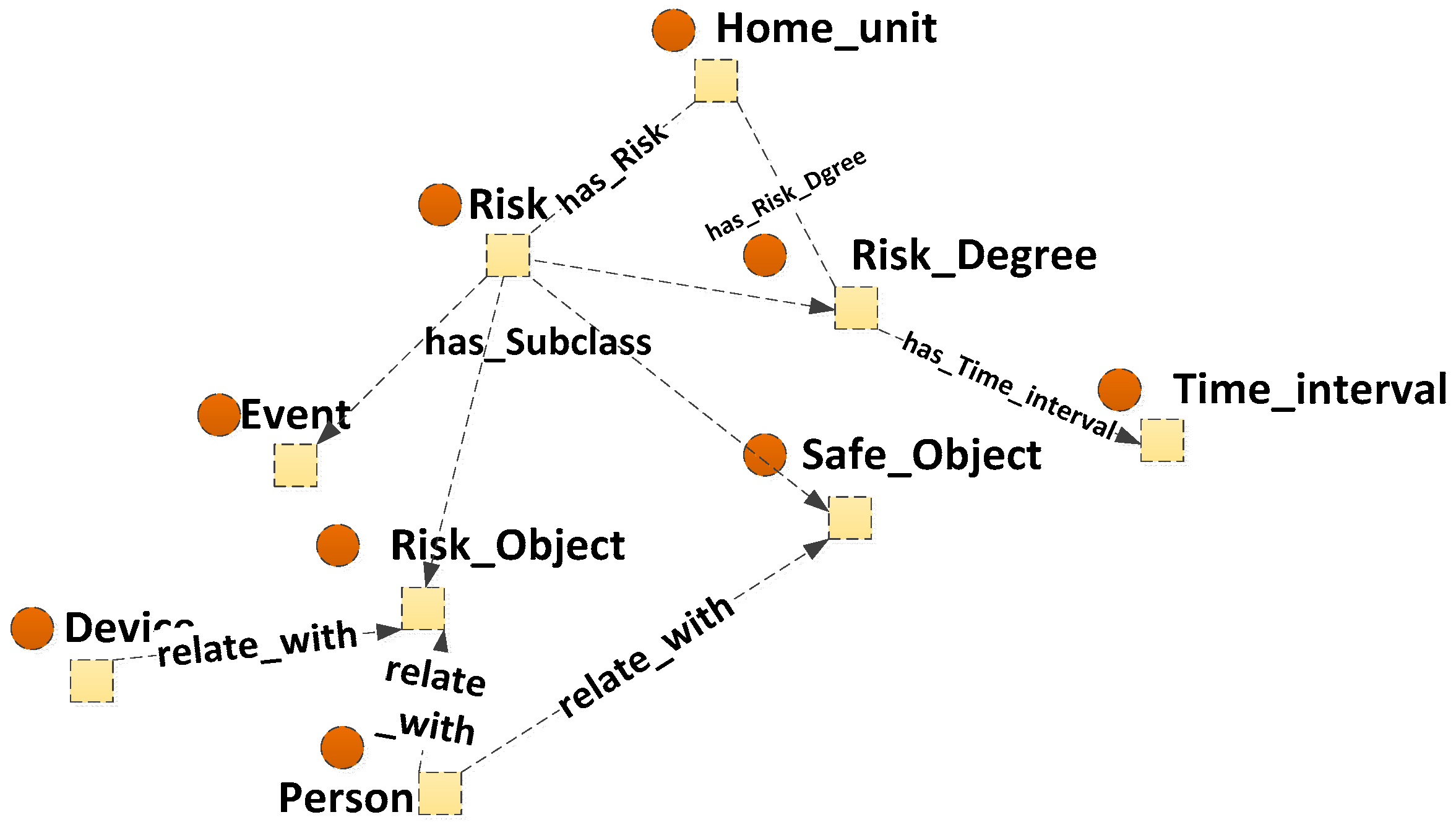
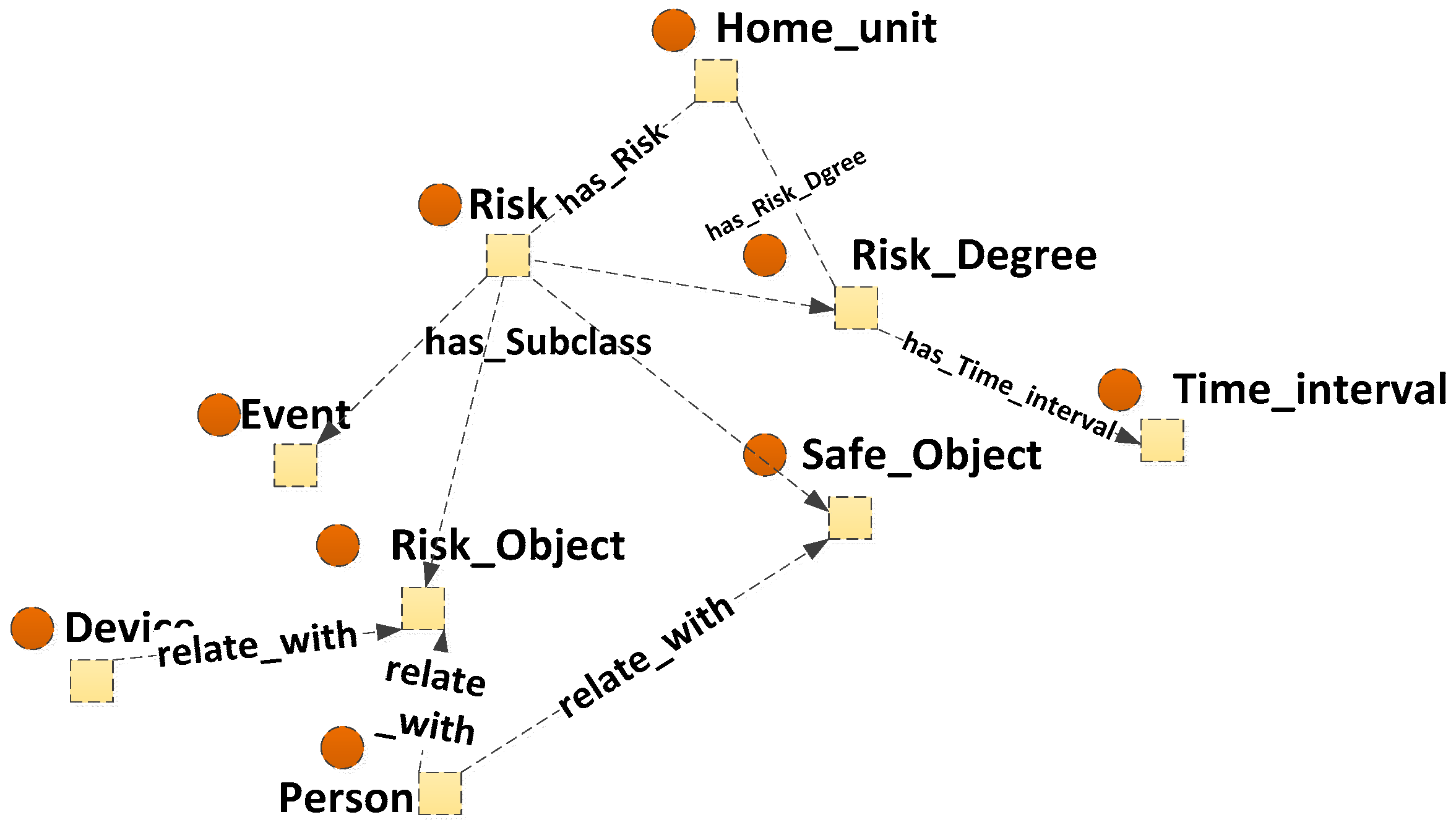
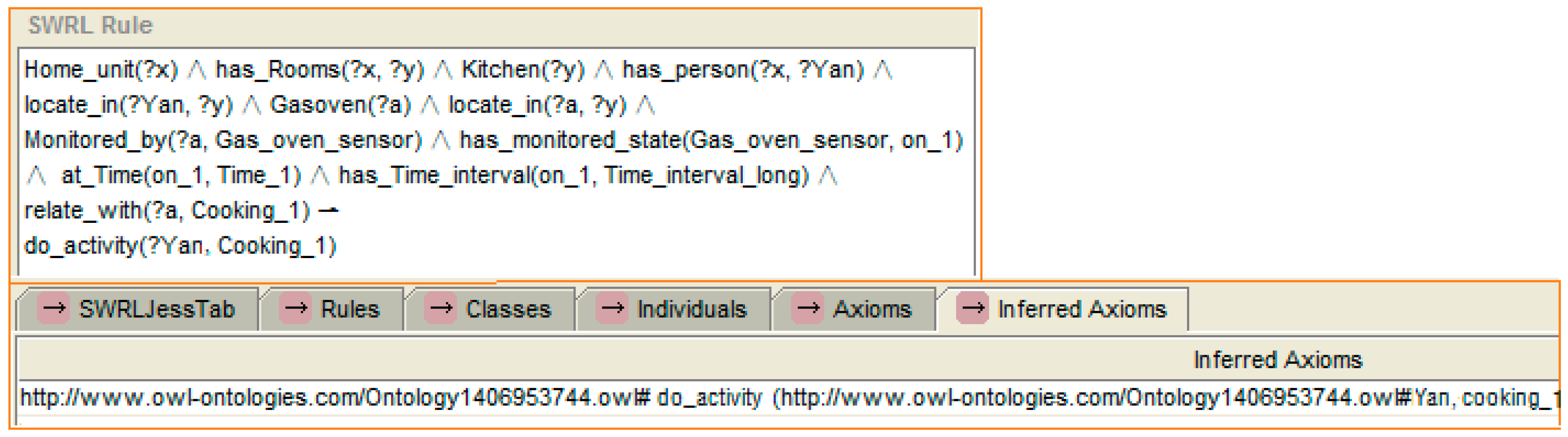
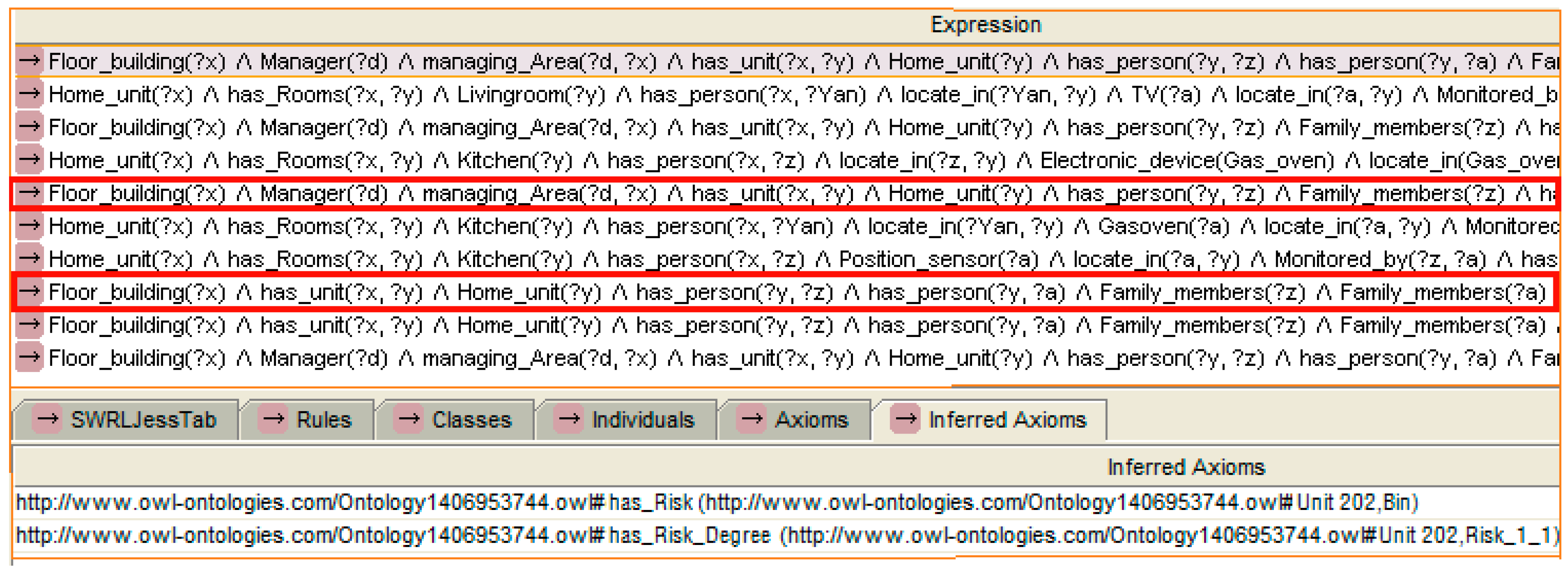
- A risk object set OR {OR1, OR2, OR3... ORn} is built. For some devices or a person who may be at risk, we defined them as the risk object. For example, a child is playing may drop from a window, or an oven left on may lead to a fire, in which, child and oven are objects which may lead to risk. They are served as the elements, and added to OR. We define a “relate_with” property which links those subclasses to “Risk_object” class in ontology previous, as shown in Figure 4. However, this does not mean those objects are really risk objects but only some common object in daily risk situations. Only under some specific conditions may they lead to risk. Most of the time, they are safe, such as when the oven is not running.
- Another set of events ER {ER1, ER2, ER3... ERn} is built which contains the event elements related with the elements in set OR. We define the event as an activity or a state of person or device. For example, the activity “cooking” is an event, and the state change of “running” of oven is also an event, if the event in the set ER is aware of the object in OR, such as an oven that is running. It is a condition which may lead to risk, but not necessarily. When an event occurs in a risk situation and is related with risk, it is a risk event.
- The situation is conceptualised as a snapshot of states at a specific time window in a physical or conceptual environment [17]. It may contain one event or several events occurring in one same time window as well as a detailed description of events which are related to a person, object or device object and the time window it take places. For example, in a time window, the mother is detected as being located in the kitchen, and the state of oven is detected as “running” for a “Medium” time. The situation which involves risk is a risk situation.
- To assess whether the situation has become a risk situation, another object set PS {PS1, PS2, PS3... PSn} is built, which represents the person not at risk, such as the adult resident. The state of PSi is checked. If it has some same states with ORi, the situation is recognized as safe. For example, after a “cooking” activity which is related with “Oven” has been recognised, if an adult resident is aware and has been detected as “located in kitchen” in the same time window, the situation is recognized as safe, otherwise, the situation is continually monitored.
- The change detection compares the context situation of the current time window τ(i) with the context situation of the previous time window τ(i–1). For the second condition in step d, if the current context situation differs from the previous context situation, for example, the adult person is detected back to kitchen (locate in kitchen), then the event is still safe, otherwise, the event is recognised as “Risk”.
- The comparison is performed continuously in each time window to monitor risk until the “cooking” event is detected as being finished.
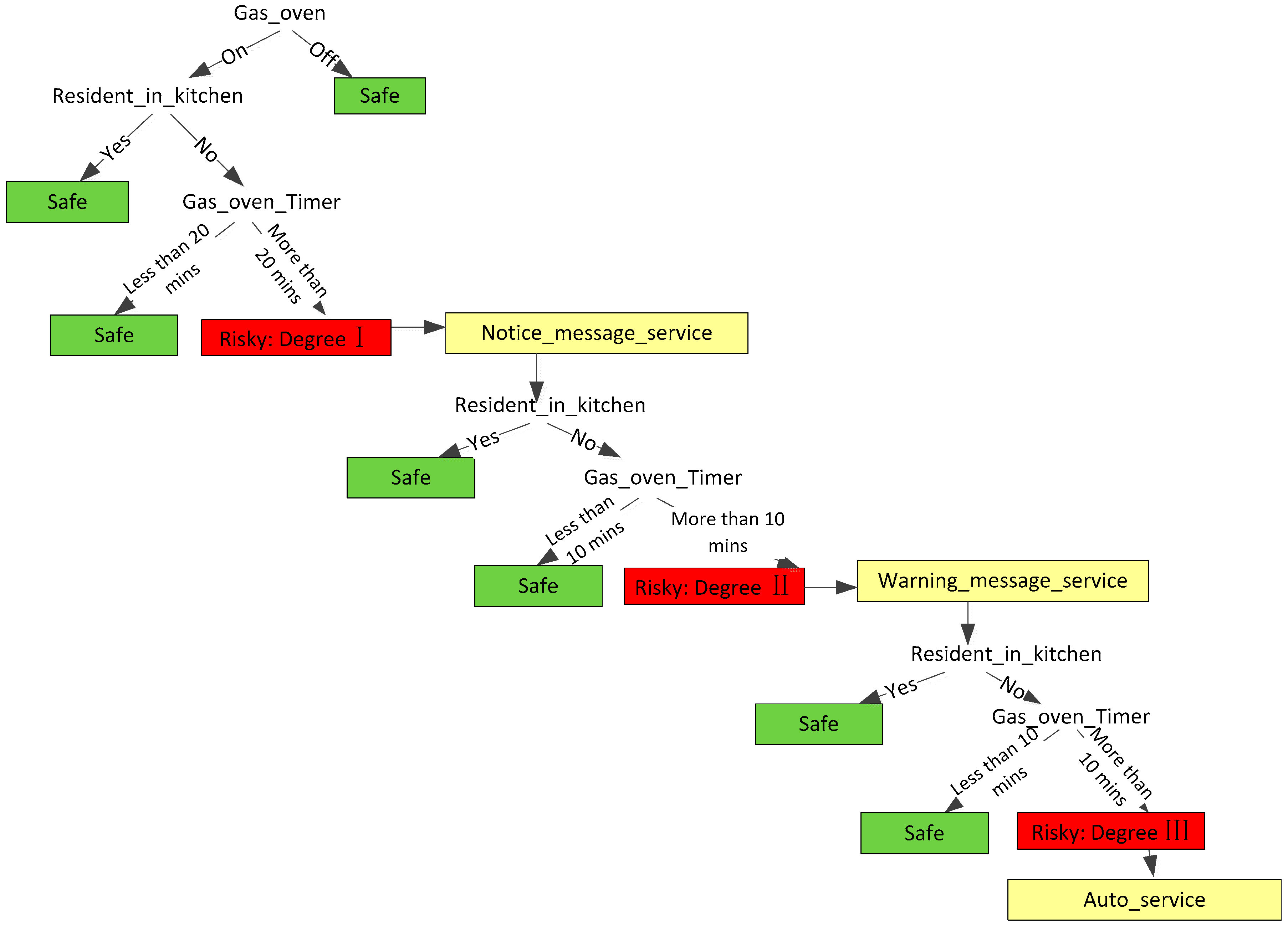
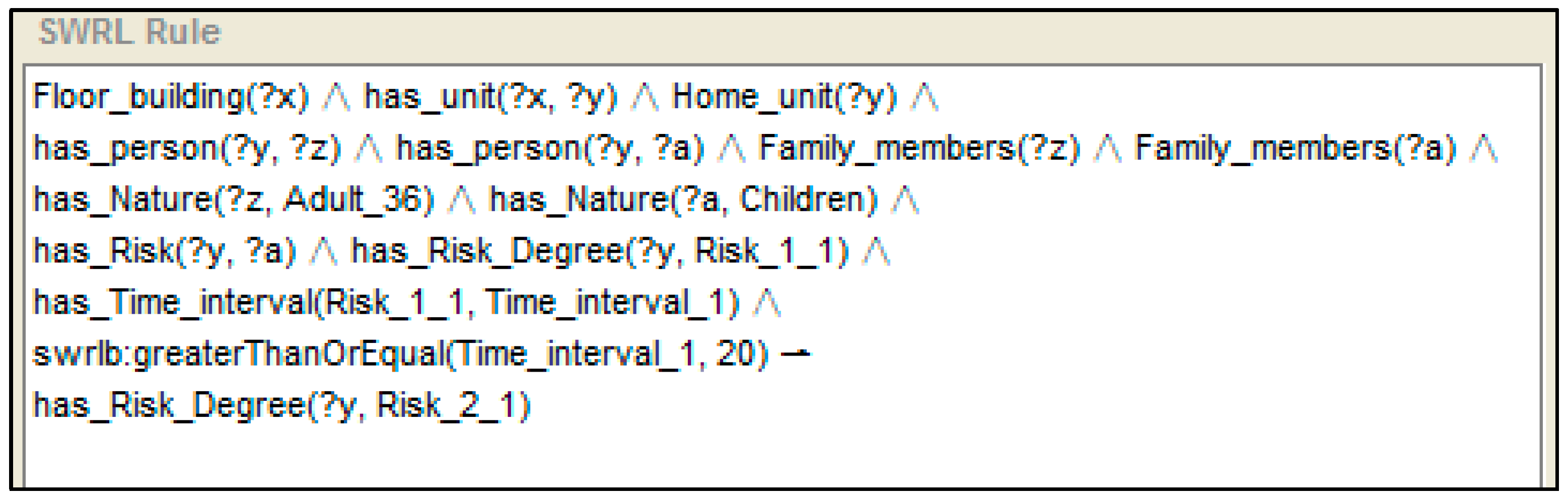
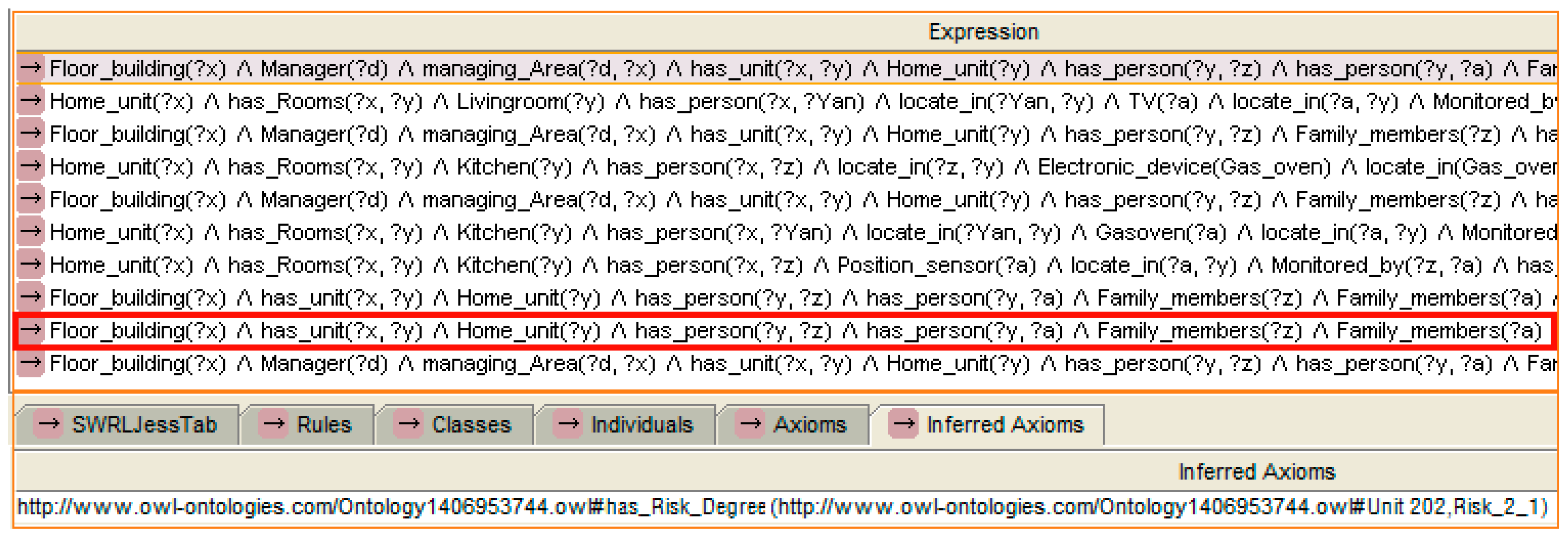
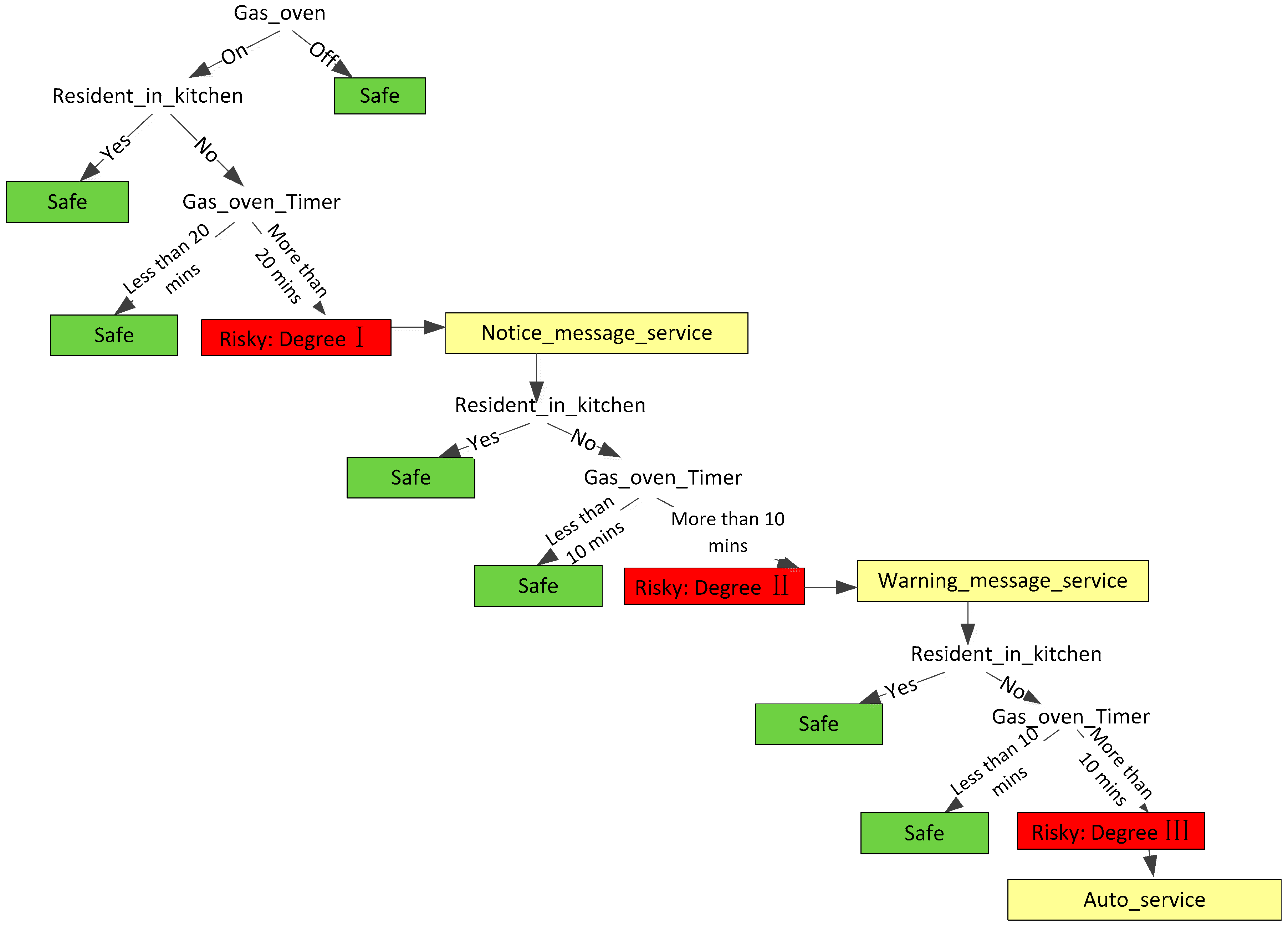
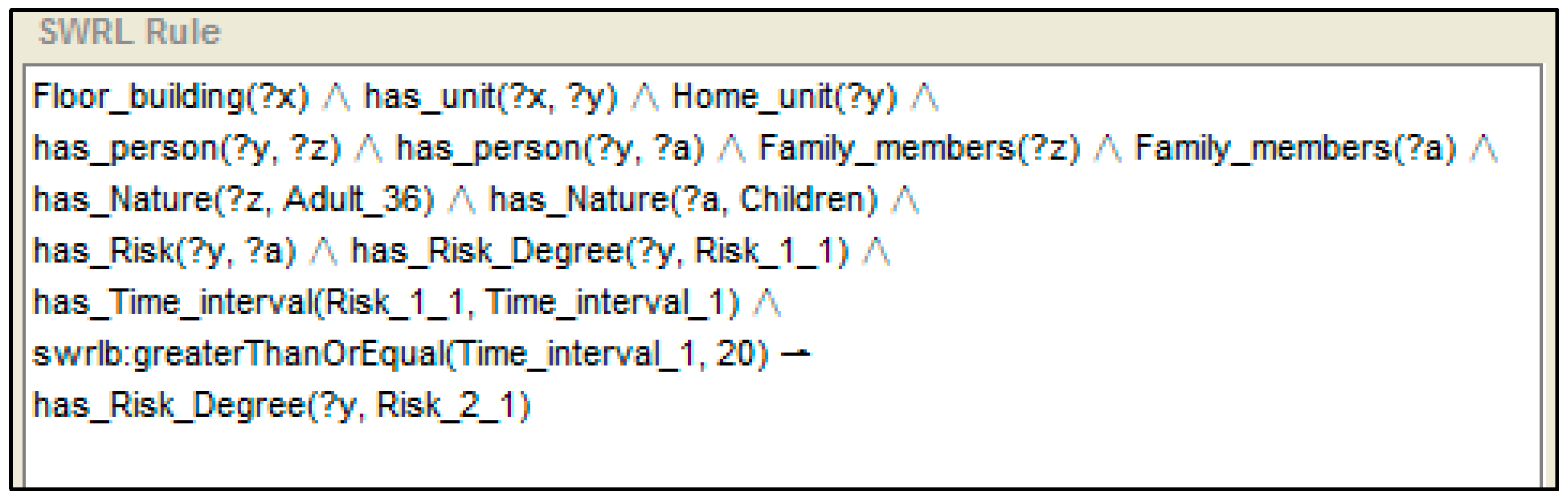
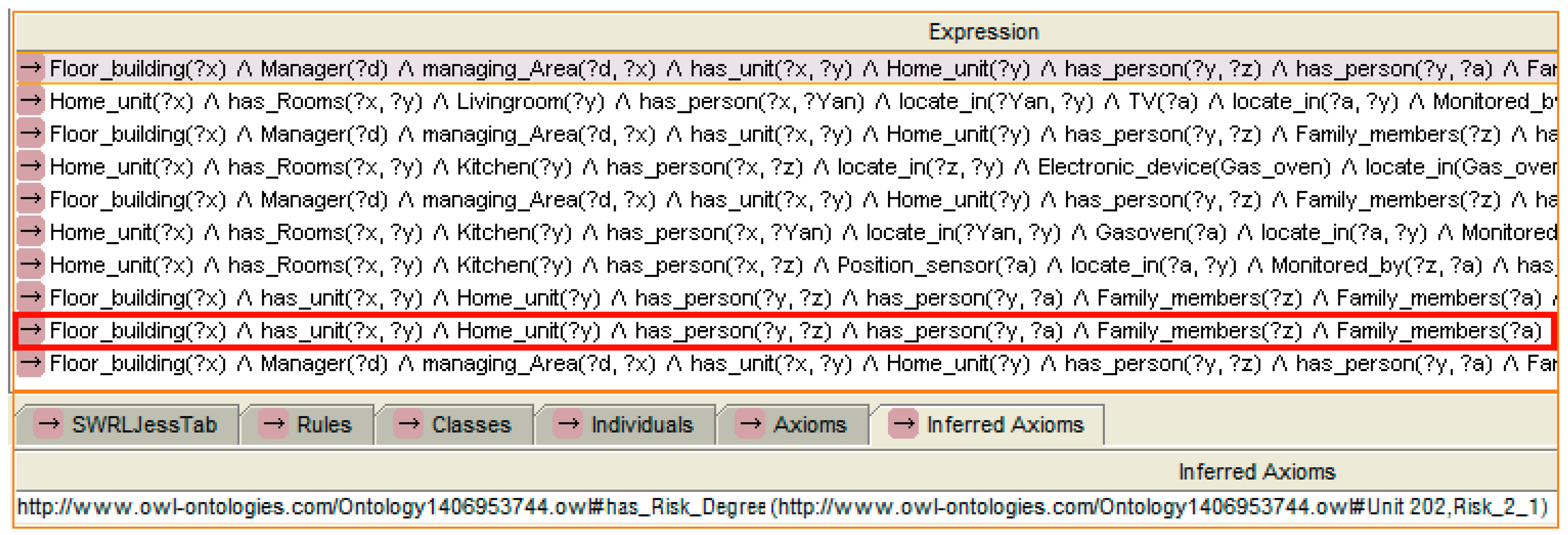
4.3. Upgraded Risk Degree Detection
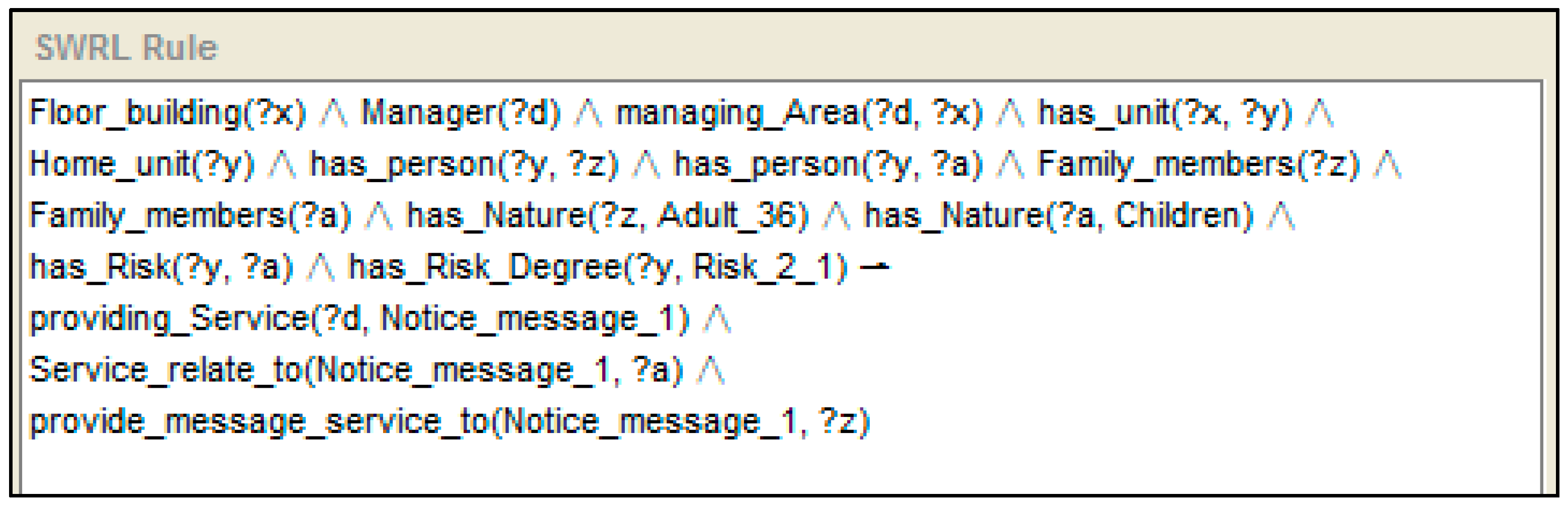
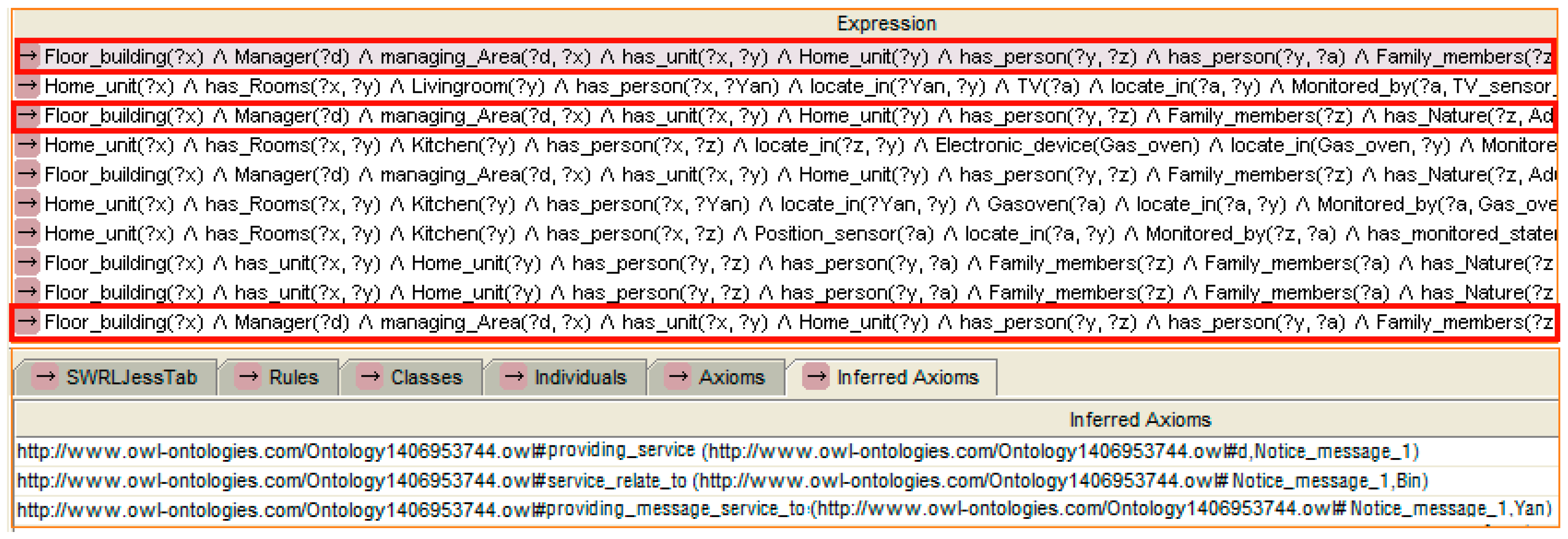
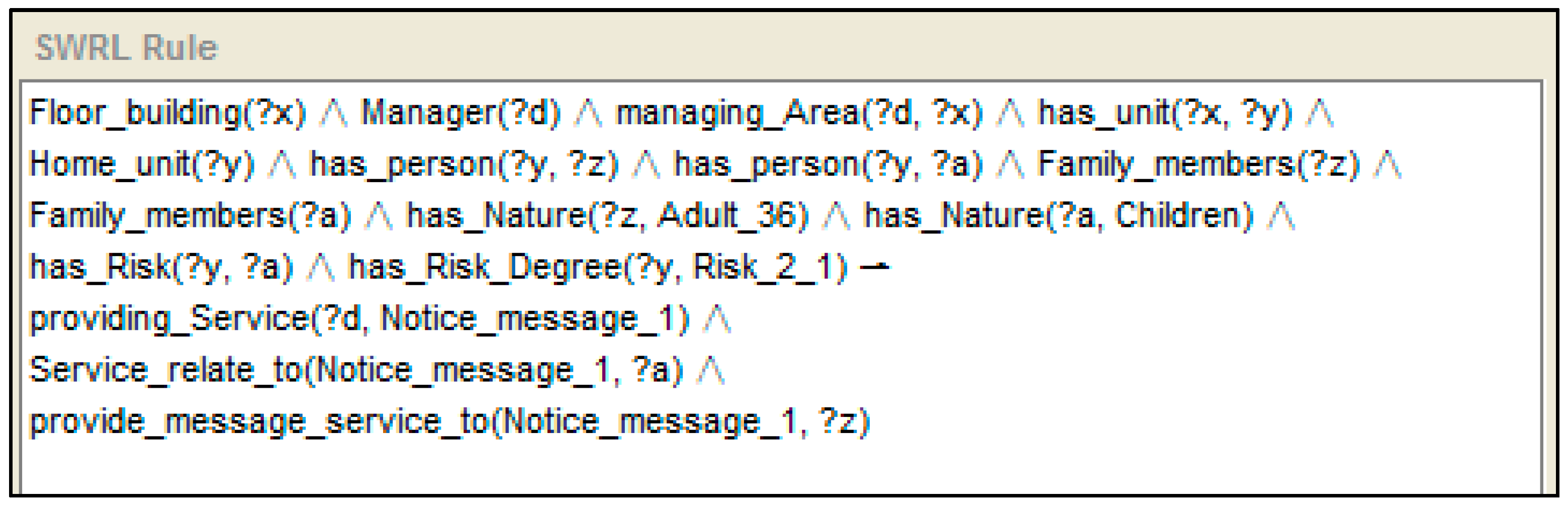
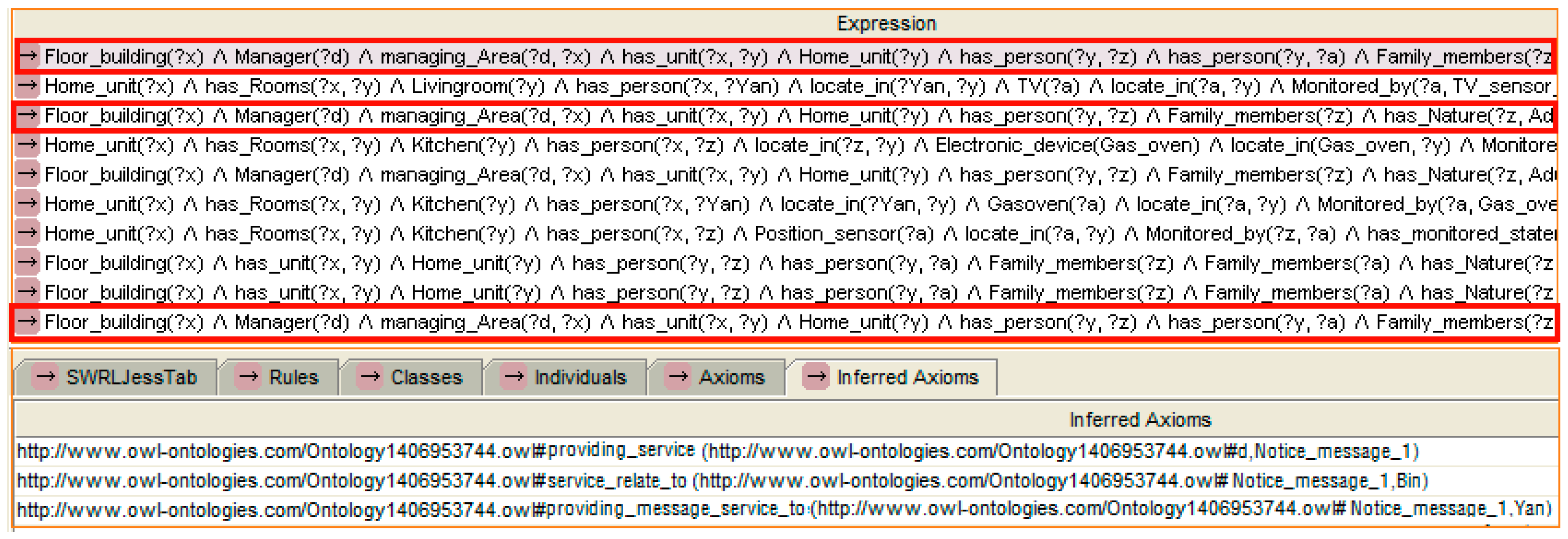
4.4. Decision Support for Service
- Who needs to be serviced?
- Who provides the service?
- What types of services should be provided?
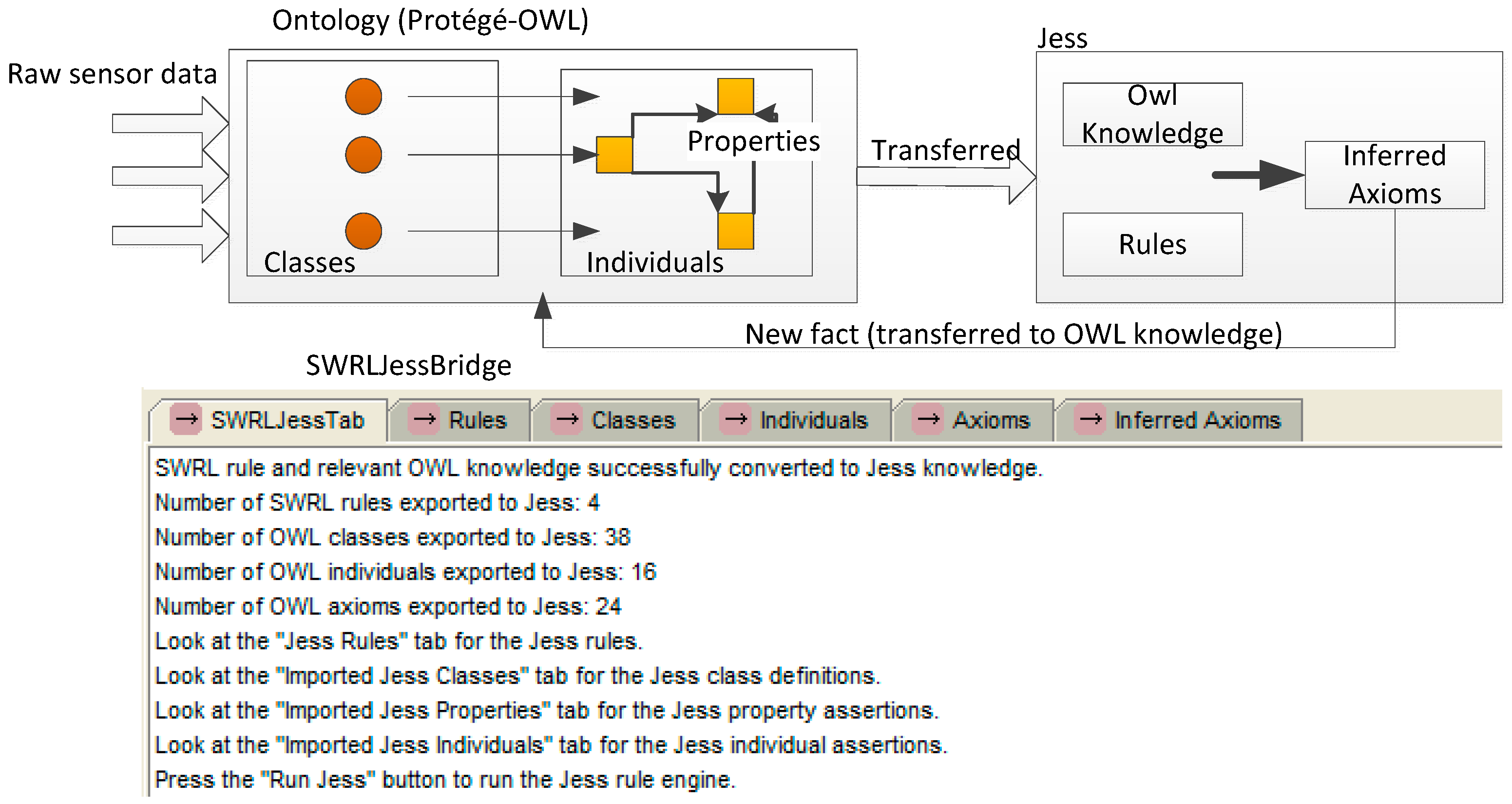
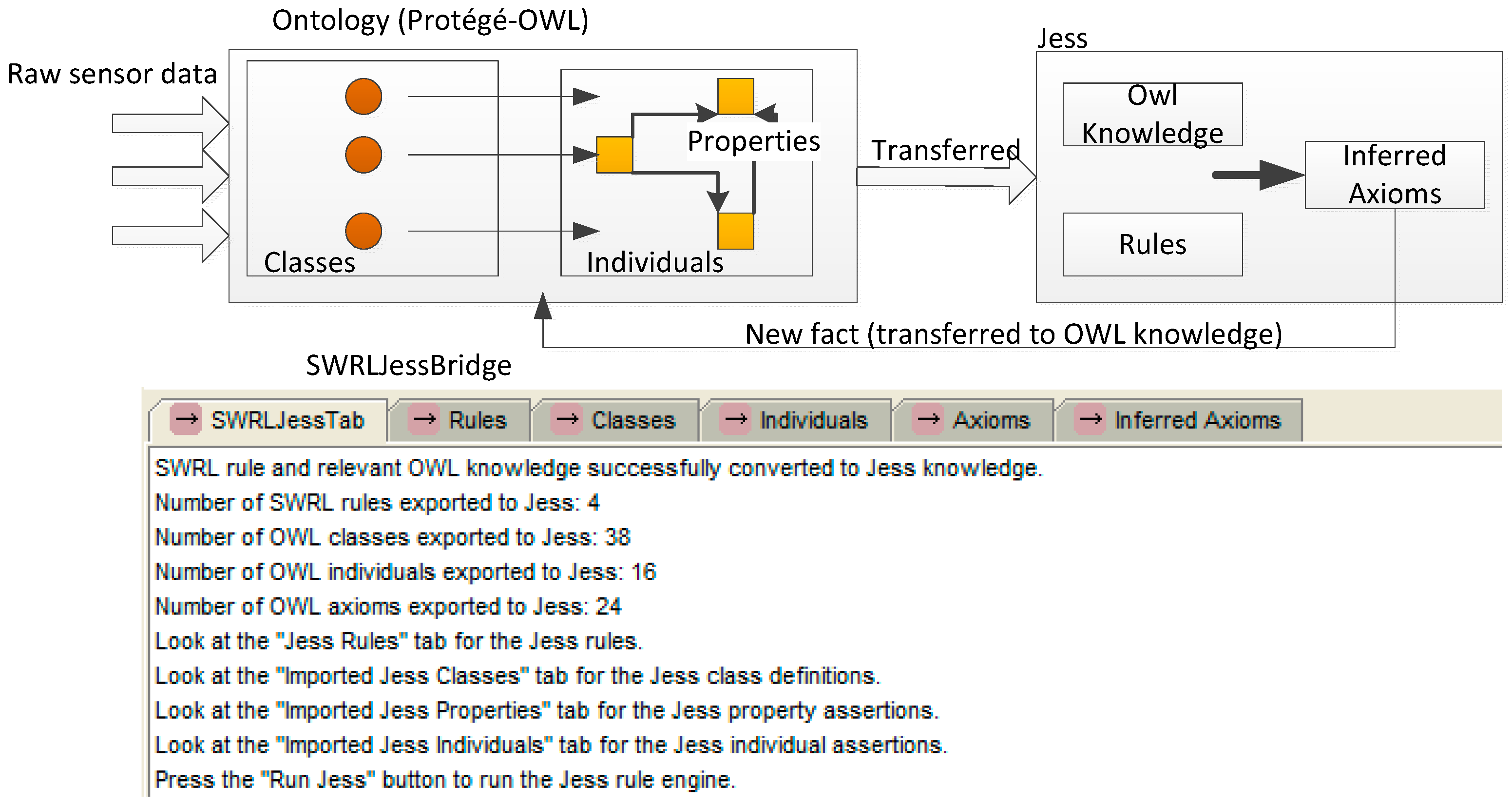
5. Integration of the Proposed Approach
6. Evaluation
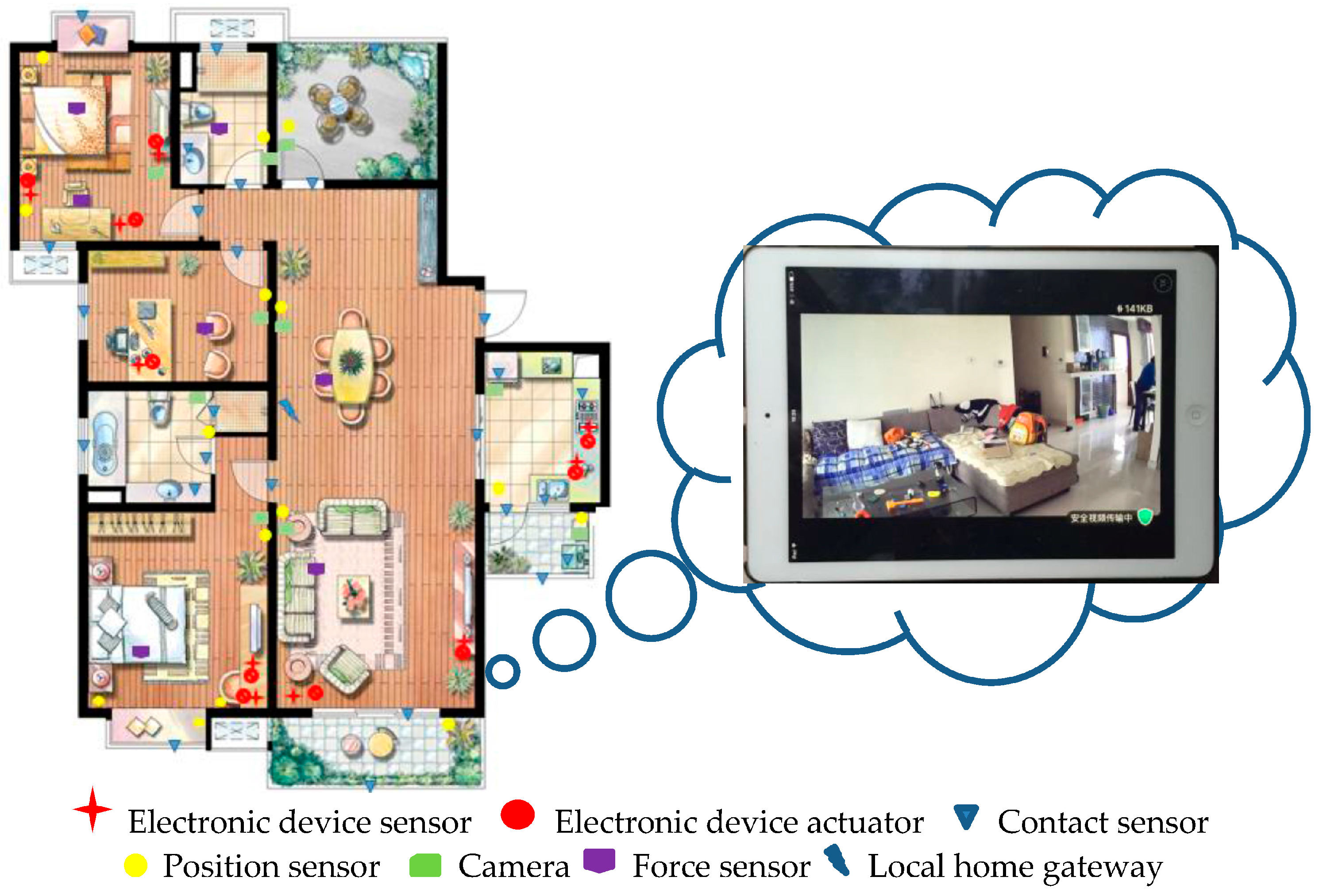
6.1. Experimental Setup
6.2. Experimental Result and Discussion
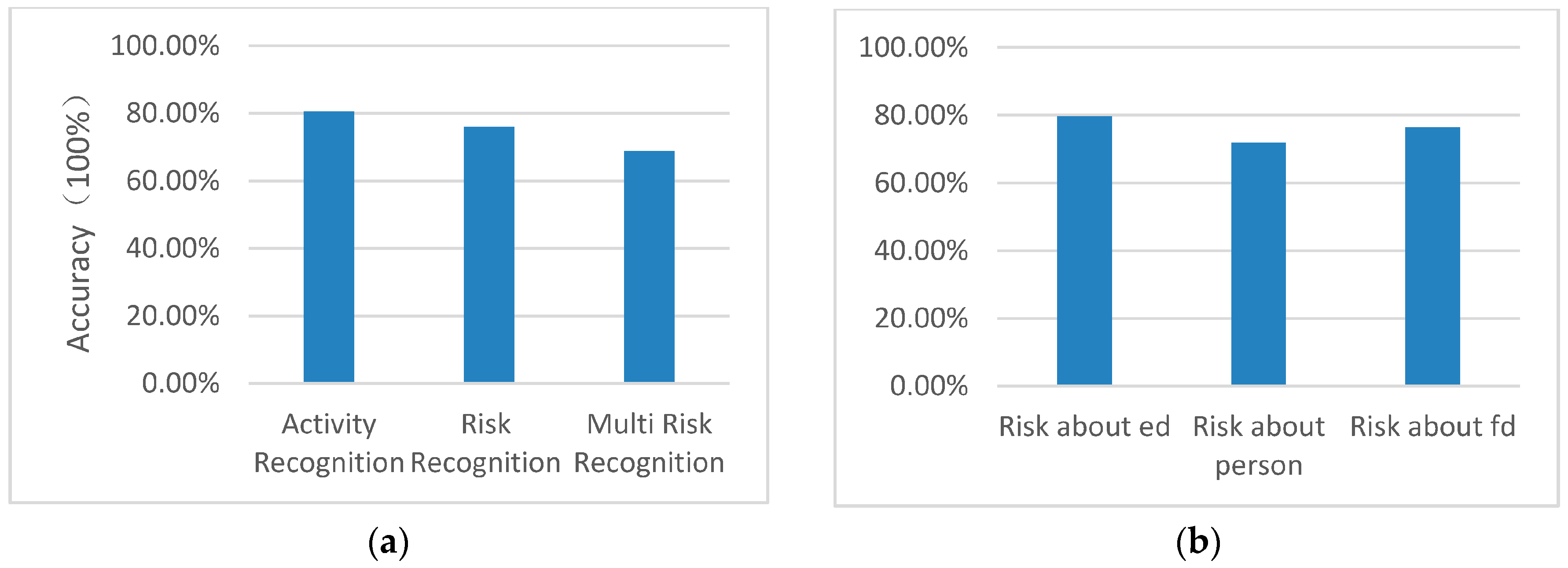
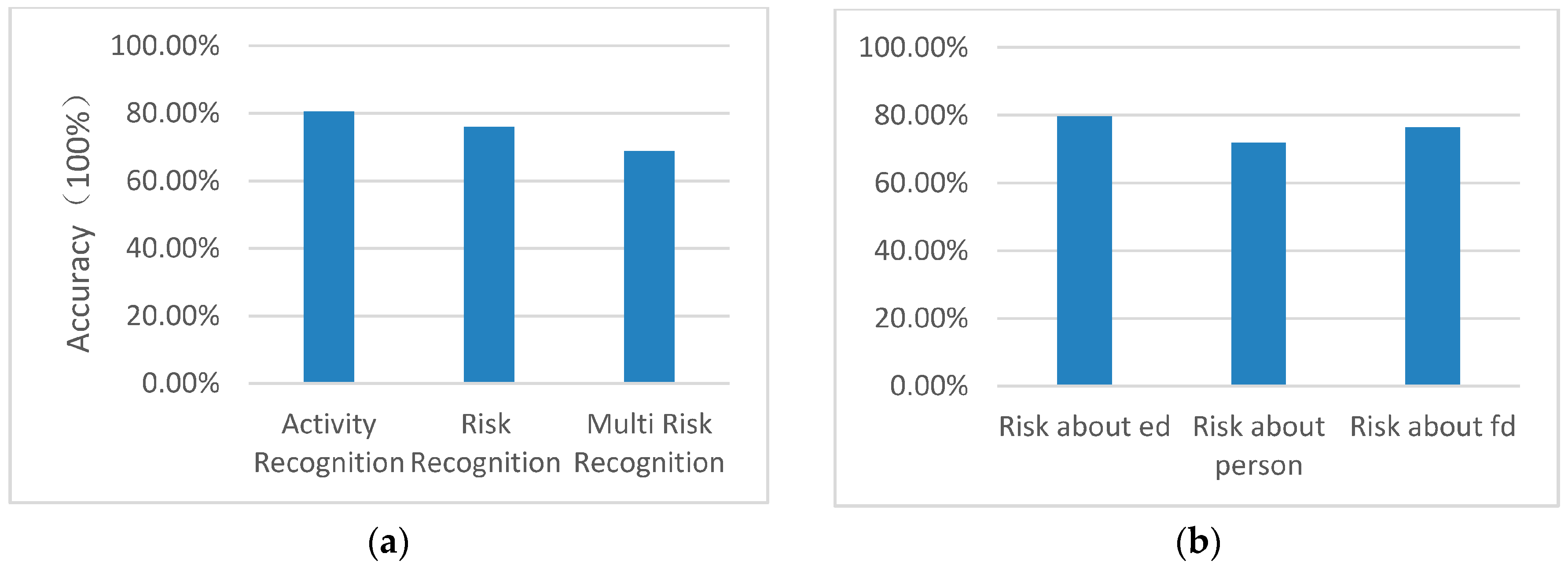
6.2.1. Accuracy of the Risk Recognition
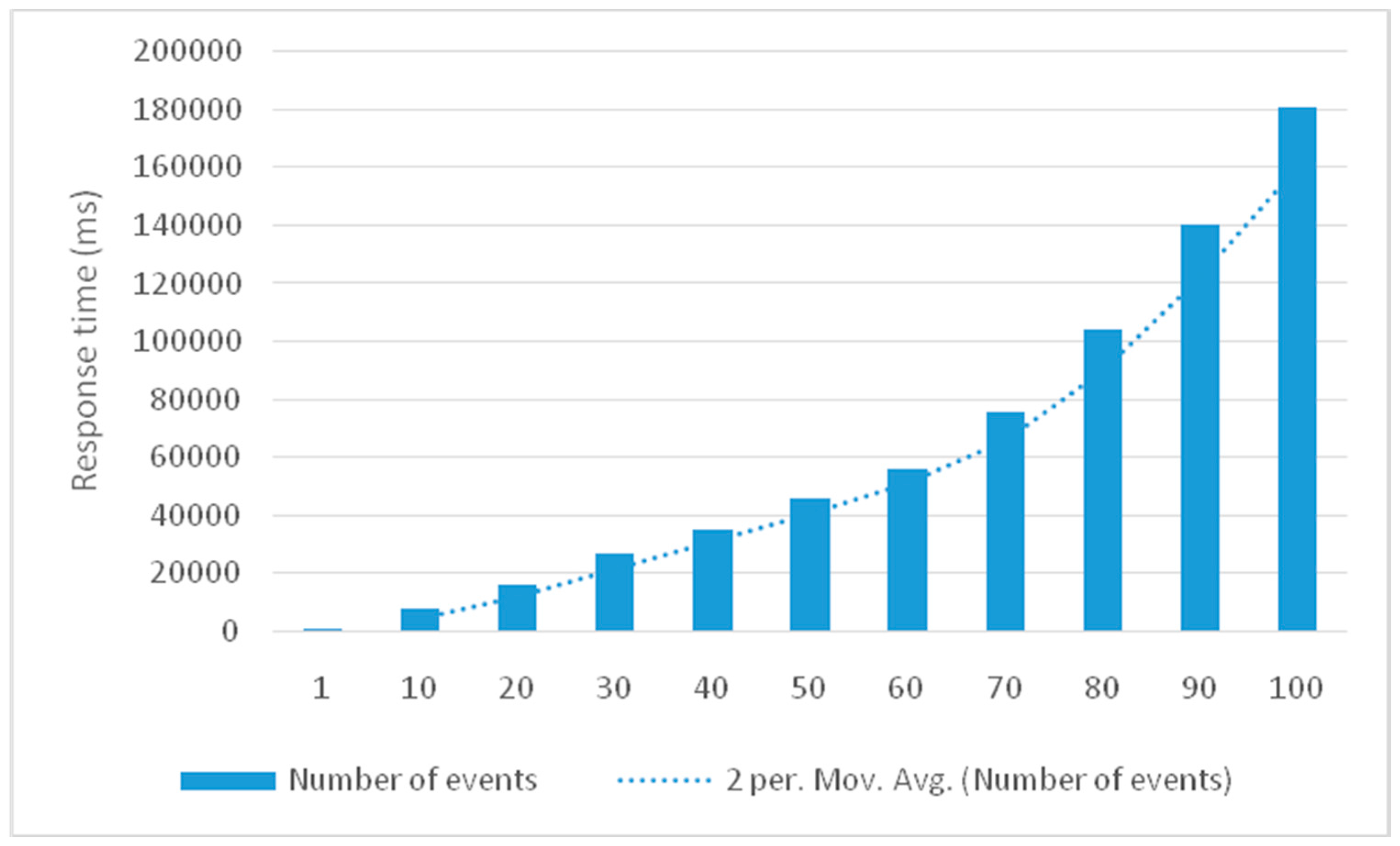
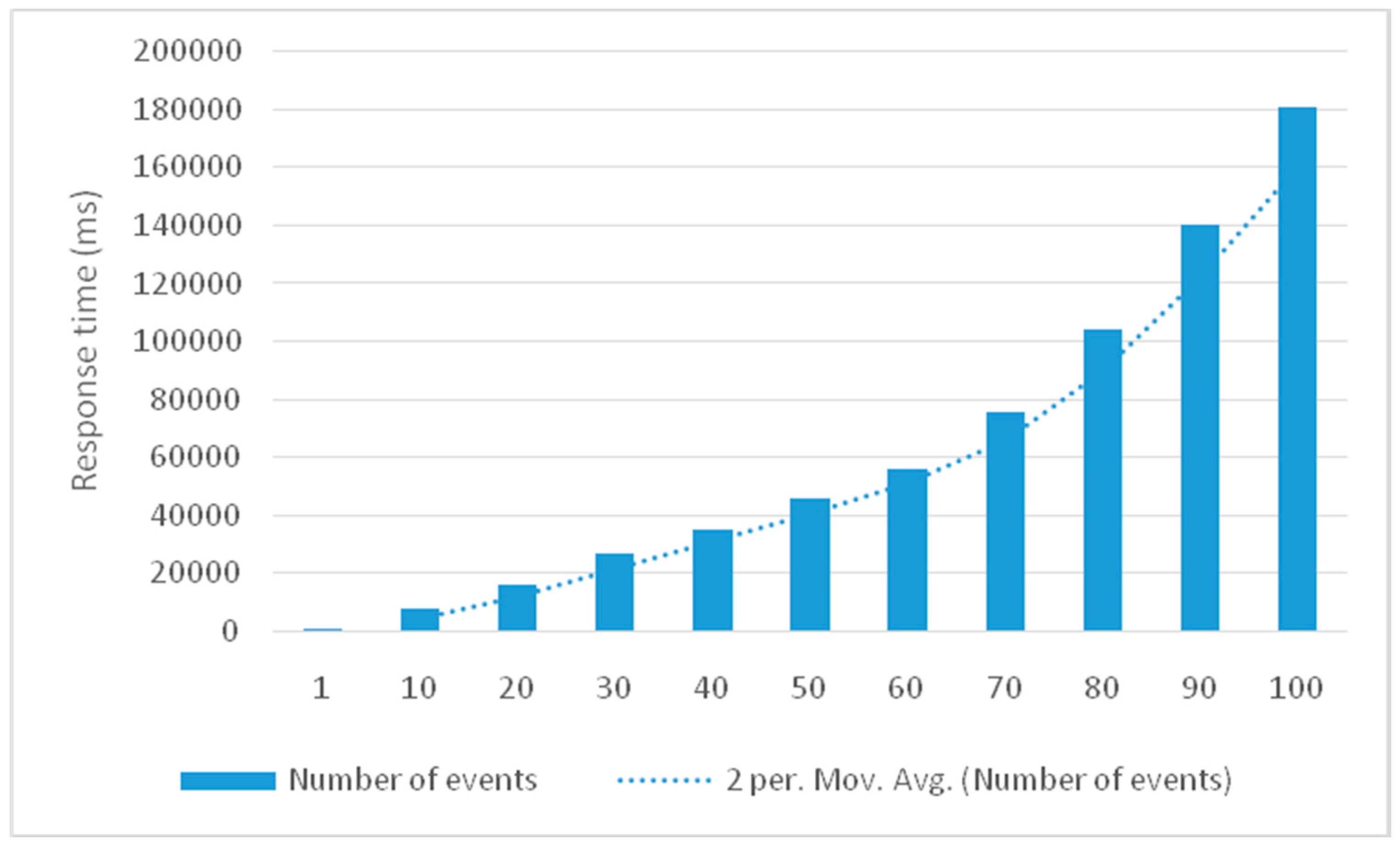
6.2.2. Time Response
6.2.3. Extensibility Evaluation
- (1)
- Add new home entity individual to “Home_entity” class. Its subclasses such as rooms in it are defined also;
- (2)
- Add new home context individuals to the subclasses of “Person”, “Device”, “Sensor”, “Actuator” etc. according to the situation of new home;
- (3)
- Add new manager individuals to the subclass of “Manager”;
- (4)
- Link the property contact between new individuals, such as the linkage between “Device” and “Sensor”, “Person” with “Activity” and so on. Especially, the relationship between the monitored object with “Risk_Object”, “Risk_Event” and “Safe_Object” is very important;
- (5)
- Related reasoning rules about the new home are selected.
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ghayvat, H.; Liu, J.; Gui, X. Wellness sensor networks: A proposal and implementation for smart home for assisted living. IEEE Sens. J. 2015, 12, 7341–7348. [Google Scholar] [CrossRef]
- Okeyo, G.; Chen, L.; Wang, H. Combining ontological and temporal formalisms for composite activity modelling and recognition in smart homes. Future Gener. Comput. Syst. 2014, 39, 29–43. [Google Scholar] [CrossRef]
- Sohn, M.; Jeong, S.; Lee, H.J. Self-evolved ontology-based service personalization framework for disabled users in smart home environment. In Proceedings of the 2013 Seventh International Conference on Innovative Mobile and Internet Services in Ubiquitous Computing, Taichung, Taiwan, 3–5 July 2013; pp. 238–245.
- Amiribesheli, M.; Benmansour, A.; Bouchachia, A. A review of smart homes in healthcare. J. Ambient Intell. Humaniz. Comput. 2015, 6, 495–517. [Google Scholar] [CrossRef]
- Bonino, D.; Castellina, E.; Corno, F. The DOG gateway: Enabling ontology-based intelligent domotic environments. IEEE Trans. Consum. Electron. 2008, 54, 1656–1664. [Google Scholar] [CrossRef]
- Wang, Y.W.; Yu, H.L.; Li, Y. Internet of things technology applied in medical information. In Proceedings of the 2011 International Conference on Consumer Electronics, Communications and Networks (CECNet), Xianning, China, 16–18 April 2011; pp. 430–433.
- Perera, C.; Zaslavsky, A.; Christen, P.; Georgakopoulos, D. Context aware computing for the internet of things: A survey. IEEE Commun. Surv. Tutor. 2014, 16, 414–454. [Google Scholar] [CrossRef]
- Pantelopoulos, A.; Bourbakis, N.G. A survey on wearable sensor based systems for health monitoring and prognosis. IEEE Trans. Syst. Man Cybern. C Appl. Rev. 2010, 40, 1–12. [Google Scholar] [CrossRef]
- Alemdar, H.; Ersoy, C. Wireless sensor networks for healthcare: A survey. Comput. Netw. 2010, 14, 2688–2710. [Google Scholar] [CrossRef]
- Ding, D.; Cooper, R.A.; Pasquina, P.F.; Fici-Pasquina, L. Sensor technology for smart homes. Maturitas 2011, 69, 131–136. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.; Khalil, I. Activity recognition: Approaches, practices and trends. In Activity Recognition 846 in Pervasive Intelligent Environments, 4th ed.; Atlantis Press: Paris, France, 2011. [Google Scholar]
- Demiris, G.; Rantz, M.J.; Aud, M.; Marek, K.; Tyrer, H.; Skubic, M.; Hussam, A. Older adults’ attitudes towards and perceptions of “smart home” technologies: A pilot study. Med. Inform. Internet Med. 2004, 29, 87–94. [Google Scholar] [CrossRef] [PubMed]
- Gusmeroli, S.; Piccione, S.; Rotondi, D. A capability-based security approach to manage access control in the Internet of Things. Math. Comput. Model. 2013, 58, 1189–1205. [Google Scholar] [CrossRef]
- Zhong, N.; Ma, J.H.; Huang, R.H.; Liu, J.M.; Yao, Y.Y.; Zhang, Y.X.; Chen, J.H. Research challenges and perspectives on wisdom Web of Things (W2T). J. Supercomput. 2013, 64, 862–882. [Google Scholar] [CrossRef]
- Fortin-Simard, D.; Bouchard, K.; Gaboury, S.; Bouchard, B.; Bouzouane, A. Accurate passive RFID localization system for smart homes. In Proceedings of the IEEE 3rd International Conference on Networked Embedded Systems for Every Application, Liverpool, UK, 13–14 December 2012; pp. 1–8.
- Alshahranya, F.; Abboda, M.; Moualek, I. WSN and RFID integration to support intelligent monitoring in smart buildings using hybrid intelligent decision support systems. In Proceedings of the 2nd International Conference on Computational and Experimental Science and Engineering, Antalya, Turkey, 14–19 October 2015; Volume 128, pp. 152–159.
- Bae, I. An ontology-based approach to ADL recognition in smart homes. Future Gener. Comput. Syst. 2014, 33, 32–41. [Google Scholar] [CrossRef]
- Chen, L.; Hoey, J.; Nugent, C.D.; Cook, D.J.; Yu, Z. Sensor-Based Activity Recognition. IEEE Trans. Syst. Man Cybern. C Appl. Rev. 2012, 6, 790–808. [Google Scholar] [CrossRef]
- Pavel, M.; Adami, A.; Morris, M.; Lundell, J.; Hayes, T.L.; Jimison, H.; Kaye, J.A. Mobility assessment using event-related responses. In Proceedings of the 1st Transdisciplinary Conference Distributed Diagnosis and Home Healthcare, Arlington, VA, USA, 2–4 April 2006; pp. 71–74.
- Chikhaoui, B.; Wang, S.; Pigot, H. A frequent pattern mining approach for ADLs recognition in smart environments. In Proceedings of the 2011 IEEE International Conference on Advanced Information Networking and Application, Biopolis, Singapore, 22–25 March 2011.
- Cook, D.J.; Dawadi, P. Analyzing activity behavior and movement in a naturalistic environment using smart home techniques. IEEE J. Biomed. Health Inform. 2015, 19, 1882–1892. [Google Scholar] [CrossRef] [PubMed]
- Cheek, P.; Nikpour, L.; Nowlin, H.D. Aging well with smart technology. Nurs. Adm. Q. 2005, 29, 329–338. [Google Scholar] [CrossRef] [PubMed]
- Perry, M.; Dowdall, A.; Lines, L.; Hone, K. Multimodal and ubiquitous computing systems: Supporting independent-living older users. IEEE Trans. Inf. Technol. Biomed. 2004, 8, 258–270. [Google Scholar] [CrossRef] [PubMed]
- Soar, J.; Seo, Y. Health and aged care enabled by information technology. Ann. N. Y. Acad. Sci. 2007, 1114, 154–161. [Google Scholar] [CrossRef] [PubMed]
- Tomita, M.R.; Mann, W.C.; Stanton, K.; Tomita, A.D.; Sundar, V. Use of currently available smart home technology by frail elders: Process and outcomes. Geriatr. Rehabil. 2007, 23, 24–34. [Google Scholar] [CrossRef]
- Nguyen, T.A.; Raspitzu, A.; Aiello, M. Ontology-based office activity recognition with applications for energy savings. J. Ambient Intell. Humaniz. Comput. 2014, 5, 667–681. [Google Scholar] [CrossRef]
- Alexander, G.L.; Rantz, M.; Skubic, M.; Koopman, R.J.; Phillips, L.J.; Guevara, R.D.; Miller, S.J. Evolution of an early illness warning system to monitor frail elders in independent living. J. Healthc. Eng. 2011, 2, 337–363. [Google Scholar] [CrossRef] [PubMed]
- Cocco, J. Smart home technology for the elderly and the need for regulation. J. Environ. Public Health Law 2011, 6, 85–107. [Google Scholar] [CrossRef]
- Chiang, T.C.; Liang, W.H. A context-aware interactive health care system based on ontology and fuzzy inference. J. Med. Syst. 2015, 39, 105–130. [Google Scholar] [CrossRef] [PubMed]
- Wongpatikaseree, K.; Ikeda, M.; Buranarach, M.; Supnithi, T.; Lim, A.O.; Tan, Y. Activity recognition using context-aware infrastructure ontology in smart home domain. In Proceedings of the 2012 Seventh International Conference on Knowledge, Information and Creativity Support Systems (KICSS), Melbourne, Australia, 8–10 November 2012; pp. 50–57.
- Compton, M.; Barnaghi, P.; Bermudez, L.; García-Castro, R.; Corcho, O.; Cox, S.; Graybeal, J.; Hauswirth, M.; Henson, C.; Herzog, A.; et al. The SSN ontology of the W3C semantic sensor network incubator group. Web Semant. Sci. Serv. Agents World Wide Web 2012, 17, 25–32. [Google Scholar] [CrossRef]
- Bendadouche, R.; Roussey, C.; de Sousa, G.; Chanet, J.P.; Hou, K.M. Extension of the semantic sensor network ontology for wireless sensor networks: The stimulus-WSNnode-communication pattern. In Proceedings of the 11th International Semantic Web Conference (ISWC), Boston, MA, USA, 12 November 2012; Volume 904, pp. 49–64.
- Li, M.; Lin, H. Design and implementation of smart home control systems based on wireless sensor networks and power line communications. IEEE Trans. Ind. Electron. 2015, 62, 4430–4442. [Google Scholar] [CrossRef]
- Huang, Z.; Yuan, F. Implementation of 6LoWPAN and its application in smart lighting. J. Comput. Commun. 2015, 3, 80–85. [Google Scholar] [CrossRef]
- Magno, M.; Polonelli, T.; Benini, L.; Popovici, E. A low cost, highly scalable wireless sensor network solution to achieve smart LED light control for green buildings. IEEE Sens. J. 2015, 15, 2963–2973. [Google Scholar] [CrossRef]
- Suryadevara, N.K.; Mukhopadhyay, S.C.; Kelly, S.D.T.; Gill, S.P.S. WSN-based smart sensors and actuator for power management in intelligent buildings. IEEE/ASME Trans. Mechatron. 2015, 20, 564–571. [Google Scholar] [CrossRef]
- Prossegger, M.; Bouchachia, A. Multi-resident activity recognition using incremental decision trees. In Proceedings of the 3rd International Conference on Adaptive and Intelligent Systems (ICAIS), Bournemouth, UK, 8–10 September 2014; pp. 182–191.
- Stuckenschmidt, H.; Parent, C.; Spaccapietra, S. (Eds.) Modular Ontologies: Concepts, Theories and Techniques for Knowledge Modularization; Springer-Verlag: Berlin, Germany, 2009.
- Bae, I.H.; Kim, H.G. An ontology-based ADL recognition method for smart homes. In Proceedings of the International Conference on Future Generation Communication and Networking, Jeju-si, Korea, 8–10 December 2011; pp. 8–10.
- Rodríguez, N.D.; Cuéllar, M.P.; Lilius, J.; Calvo-Flores, M.D. A survey on ontologies for human behavior recognition. ACM Comput. Surv. 2014, 46, 1–33. [Google Scholar] [CrossRef]
- Dumbill, E. Berners-Lee, the Semantic Web Vision [DB/OL]. 2010. Available online: http://www.xml.com/pub/a/2000/12/xml2000/timbl.html (accessed on 18 January 2016).
- Zhang, W.; Hansen, K.M. An OWL/SWRL based diagnosis approach in a pervasive middleware. In Proceedings of the 20th International Conference on Software Engineering and Knowledge Engineering, Redwood City, CA, USA, 1–3 July 2008; Volume 6, pp. 198–217.
- Manley, E.D.; Deogun, J.S. Location learning for smart homes. In Proceedings of the 21st International Conference on Advanced Information Networking and Applications Workshops (AINAW), Niagara Falls, ON, Canada, 21–23 May 2007; Volume 2, pp. 787–792.
- Ricquebourg, V.; Duran, D.; Menga, D.; Marhic, B.; Delahoche, L.; Logé, C.; Jolly-Desodt, A.M. Context inferring in the Smart Home: An SWRL approach. In Proceedings of the 21st International Conference on Advanced Information Networking and Applications Workshops (AINAW), Niagara Falls, ON, Canada, 21–23 May 2007.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Domain | Range | Functional Property |
|---|---|---|---|
| Locate_in | Person/Device/Sensor | Room | Functional |
| Monitored_by | Device/Person | Sensor | Inverse Functional |
| Sensing | Sensor | Device | Inverse Functional |
| has_monitored_state | Sensor | Status | Functional |
| operated_by | Electronic_device | Person | Functional |
| control | Actuator | Electronic_device | Functional |
| has_nature | Person | Person_nature | Functional |
| do_activity | Person | Activity | Functional |
| Property | Domain | Range | Functional Property |
|---|---|---|---|
| has_Risk | Home_unit | Risk | Functional |
| has_Risk_Degree | Home_unit | Risk_Degree | Functional |
| Sensing | Sensor | Device | Functional |
| relate_with | Device/Person | Risk_object | Functional |
| has_Time_interval | Risk_Degree | Time_interval | Functional |
| Property | Domain | Range | Functional Property |
|---|---|---|---|
| Providing_Service | Manager | Manage_service | Functional |
| managing_Area | Manager | Floor_building | Functional |
| Manual_service_provided_to | Manual_service | Home_unit | Functional |
| auto_service_provided_to | Auto_service | Actuator | Functional |
| message_service_provided_to | Message_service | Family_member | Functional |
| managing_Area | Manager | Floor_building | Functional |
| has_unit | Floor_building | Home_unit | Functional |
| Has_Rooms | Home_unit | Room | Functional |
| Person | Is_a | Family_member | Functional |
| Domain Class | Property | Range Class |
|---|---|---|
| Gas_oven | locate_in | Room(Kitchen) |
| Person; Electronic_device | monitored_by | Position_sensor; Device_sensor |
| Gas_oven | related_with | Cooking |
| Kitchen | has_sensor | Position_sensor |
| Kitchen ADL | locate_in | Kitchen |
| Position_sensor; Device_sensor | has_monitored_state | Person_status; Device_status |
| Person_status; Device_status | at_time | Time |
| Person_status; Device_status | has_Timeinterval | Time_interval |
| Degree | Description | Service | Service Provider |
|---|---|---|---|
| I | Slight: For example, some dangerous appliances are left operating for some time. | Notice message | Remote centre server |
| II | Light: For example, a baby crawls onto the balcony without the supervision of adults. | Warning message | Remote centre server |
| III | Moderate: For example, a dangerous appliance is still operating when the resident leaves his/her home. | Auto service Notice message | Actuator in SH with the control of the remote centre server |
| IV | Serious: For example, the resident has left home for a long time but forgot to lock the door. | Manual service Notice message | Managers of the neighbourhood |
| Situation | Type | Service |
|---|---|---|
| Air conditioner is operating without anyone at home for a short time | Risk situations about electronic device | Notice message |
| Air conditioner is operating without anyone at home for a medium time | Warning service | |
| TV is operating without anyone at home for a short time | Notice message | |
| TV is operating without anyone at home for a long time | Auto service | |
| Gas oven is operating without anyone in the kitchen for a medium time | Warning message | |
| Gas oven is operating without anyone at home for a long time | Auto service | |
| … | … | |
| A baby goes to the balcony for a medium time | Risk situations about person | Warning message |
| A baby goes to the balcony for a long time | Manual service | |
| A stranger is at home for a medium time | Warning message | |
| A stranger is at home for a long time | Manual service | |
| … | … | |
| Tap is opened without anyone in the washing room for a medium time (resident is doing another activity) | Risk situations about facility device | warning service |
| Tap is opened without anyone at home for a long time | Manual service | |
| Nobody is at home but the door is opened for a medium time | Warning message | |
| Nobody is at home for a long time but the door is opened for a long time | Manual service | |
| … | … |
| Risk Type | Number |
| Risk situations about electronic device (ed) | 28 |
| Risk situations about person | 22 |
| Risk situations about facility device (fd) | 18 |
| Service type | Number |
| Notice message | 36 |
| Warning message | 17 |
| Auto service | 9 |
| Manual service | 6 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, X.; Yi, J.; Zhu, X.; Chen, S. A Semantic Approach with Decision Support for Safety Service in Smart Home Management. Sensors 2016, 16, 1224. https://doi.org/10.3390/s16081224
Huang X, Yi J, Zhu X, Chen S. A Semantic Approach with Decision Support for Safety Service in Smart Home Management. Sensors. 2016; 16(8):1224. https://doi.org/10.3390/s16081224
Chicago/Turabian StyleHuang, Xiaoci, Jianjun Yi, Xiaomin Zhu, and Shaoli Chen. 2016. "A Semantic Approach with Decision Support for Safety Service in Smart Home Management" Sensors 16, no. 8: 1224. https://doi.org/10.3390/s16081224
APA StyleHuang, X., Yi, J., Zhu, X., & Chen, S. (2016). A Semantic Approach with Decision Support for Safety Service in Smart Home Management. Sensors, 16(8), 1224. https://doi.org/10.3390/s16081224