
Mechatronic Prototype of Parabolic Solar Tracker



Abstract
:1. Introduction
2. Materials and Methods
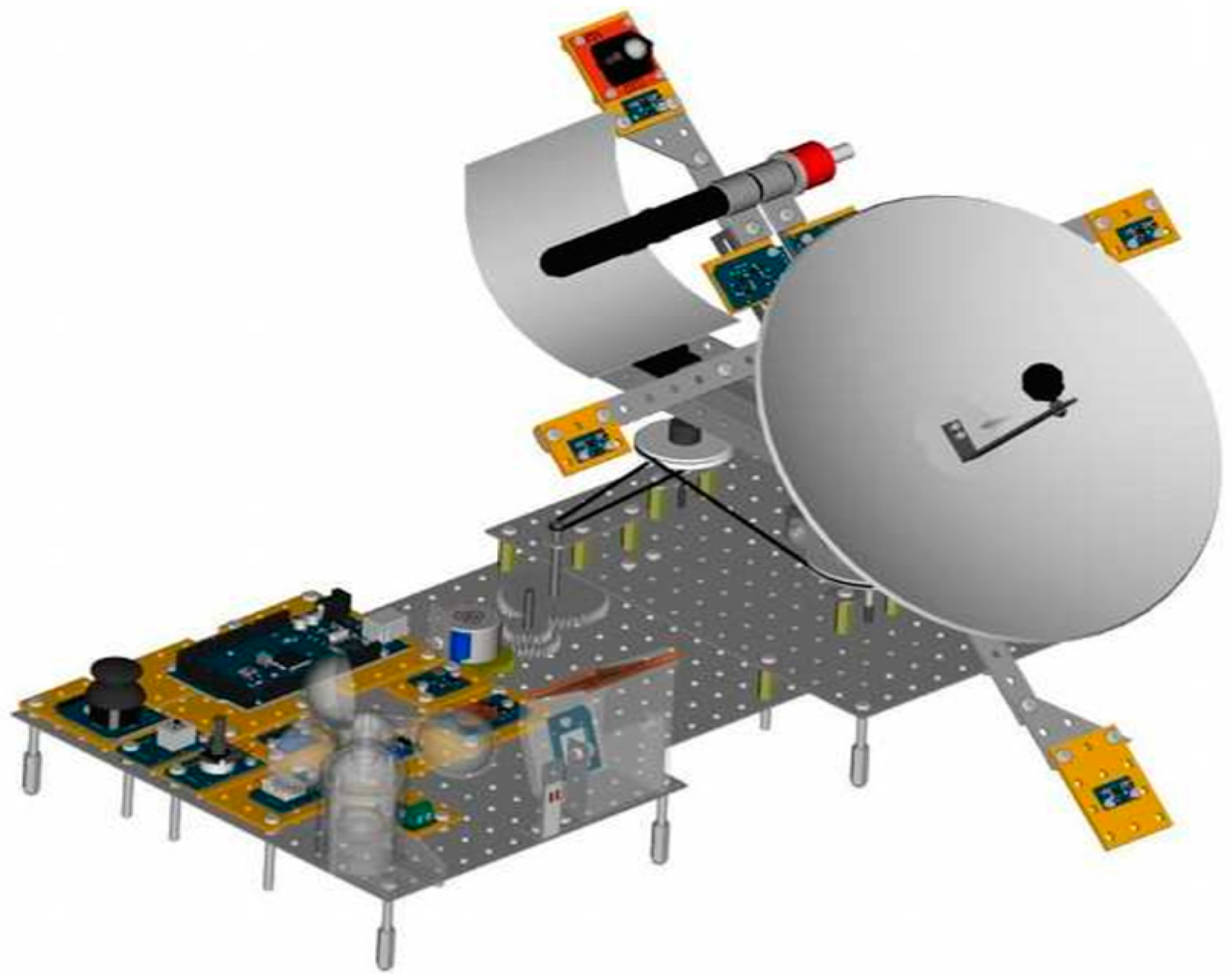
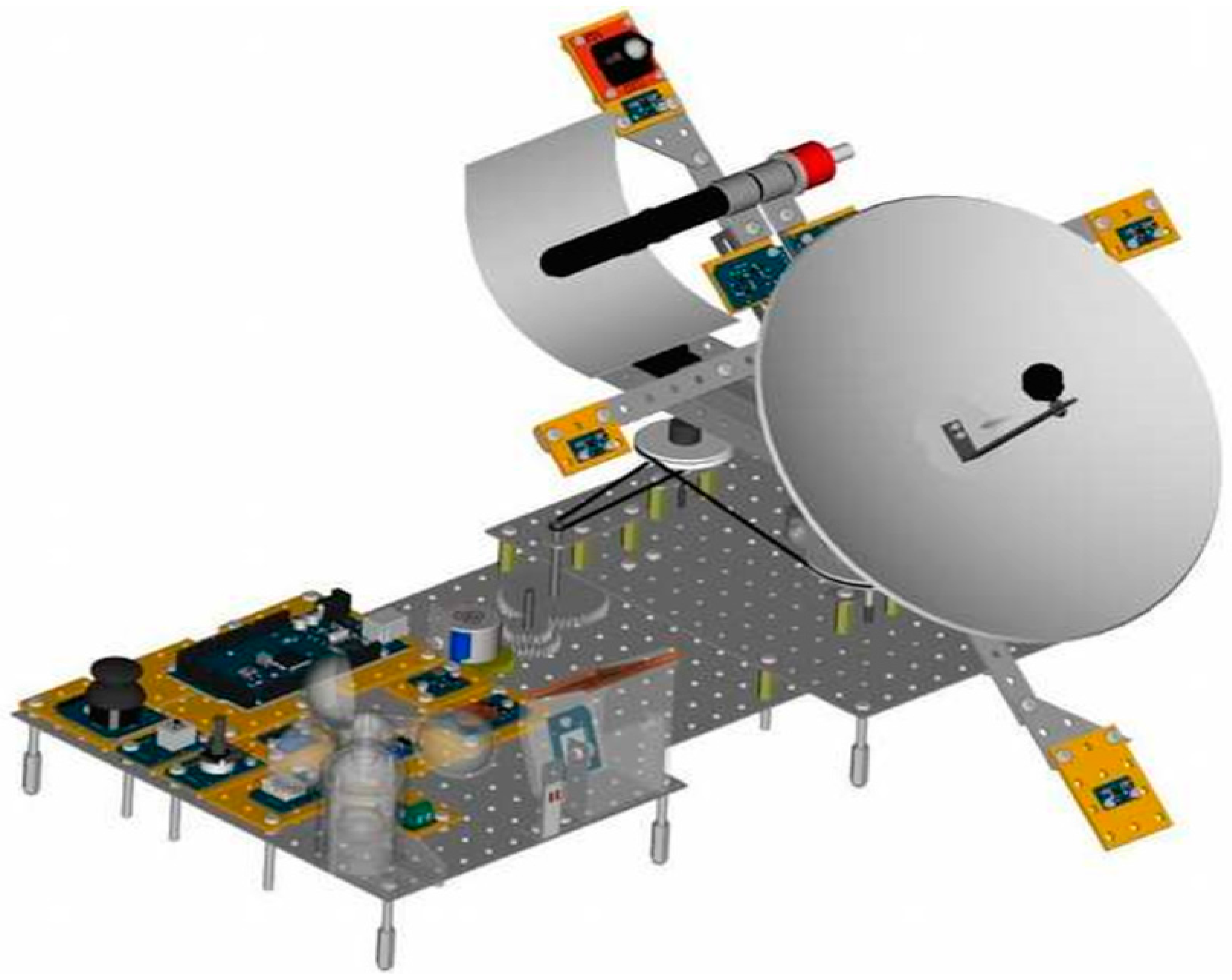
2.1. Design of the 3D Prototype
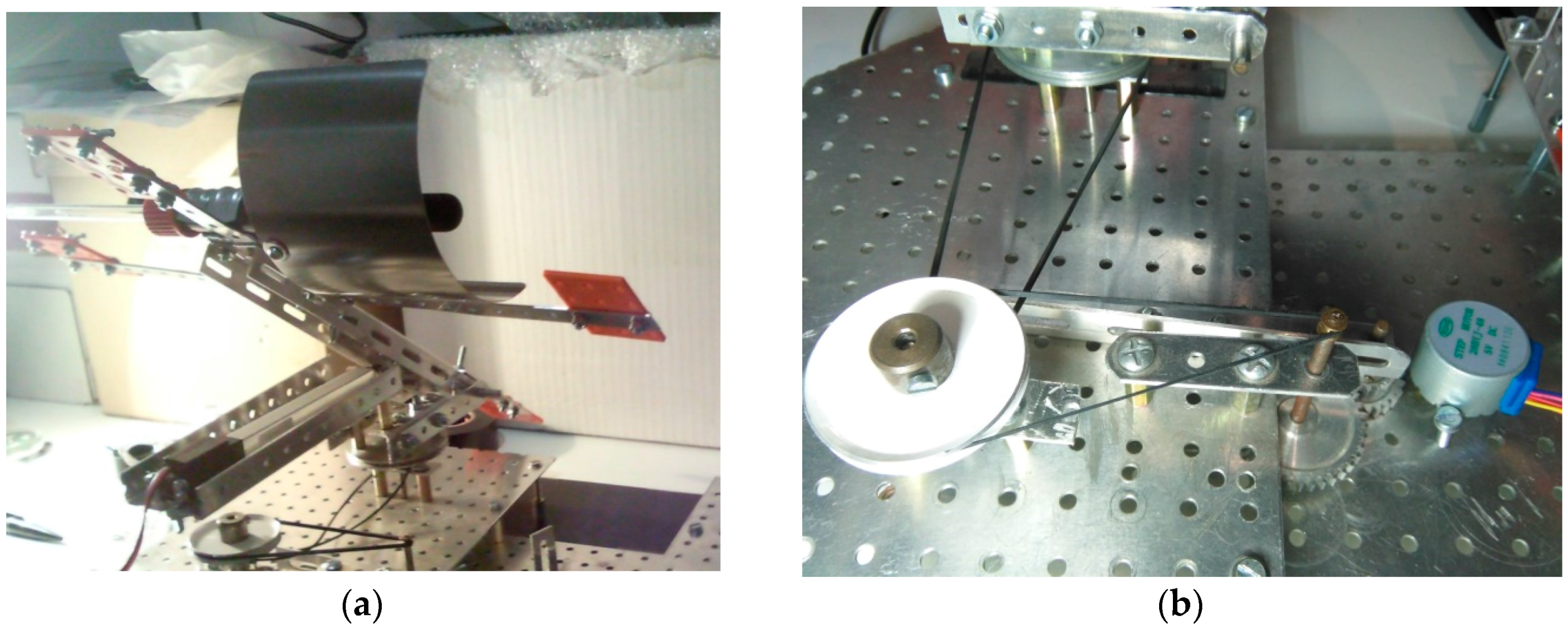
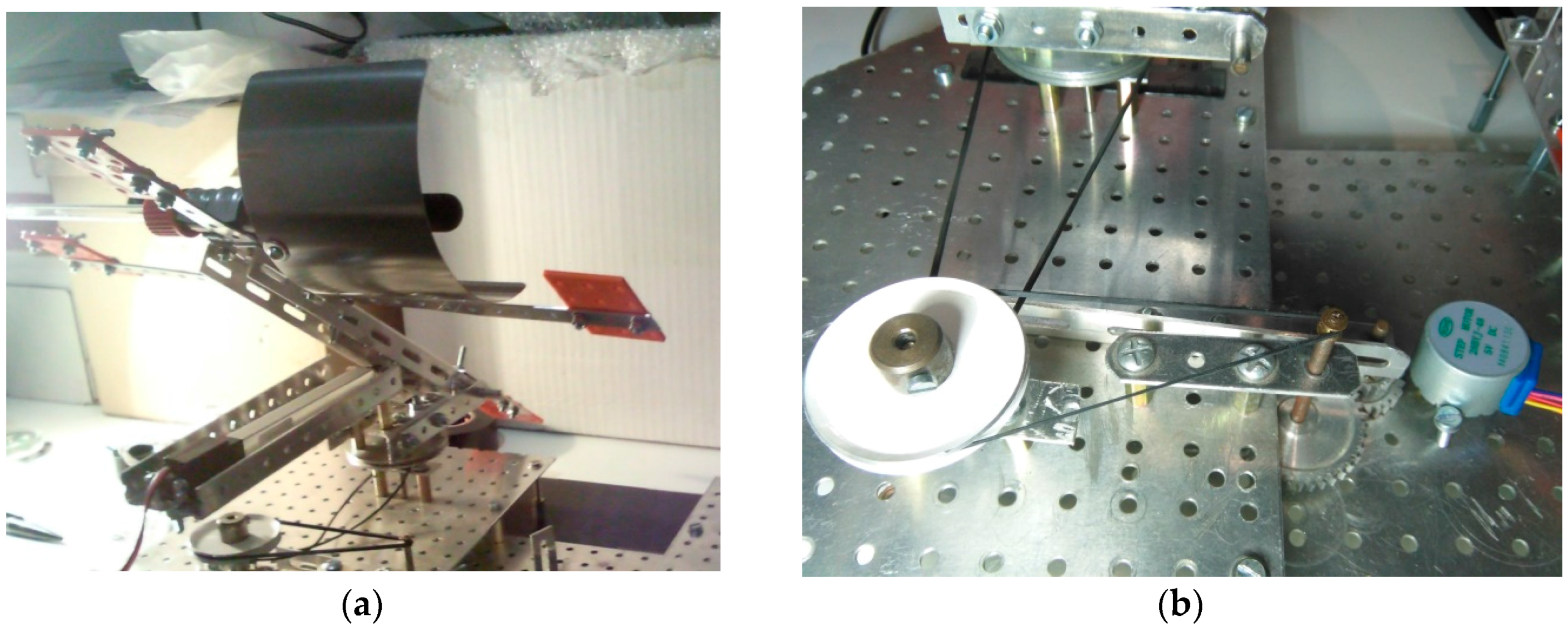
- Mechanical subsystem: made up of the aluminium framing, plastic fasteners, stainless steel screws, gears and torque transmission belts, bolts and sleeves.
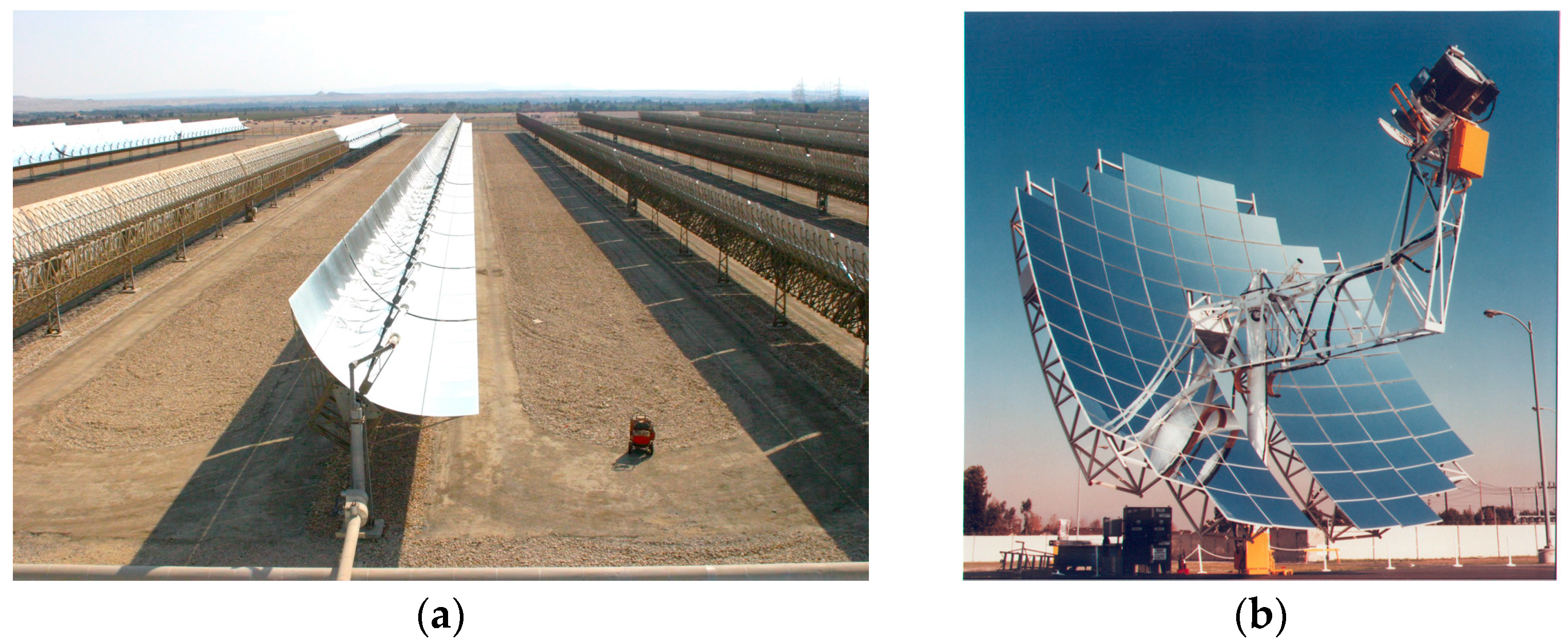
- Optical subsystem: formed by one paraboloidal collector plus a parabolic trough, being both of them made of highly reflective aluminium.
- Electronic subsystem: constituted with different physical magnitudes sensors (pressure, temperature, humidity, wind, irradiance, presence of water and air quality); positioning variables (accelerometer, compass and camera); driving devices (step by step motor and linear actuator); Arduino programmable electronic controller and many other additional devices [18,19].
2.2. Definitive State of Mechatronic Solar Tracker
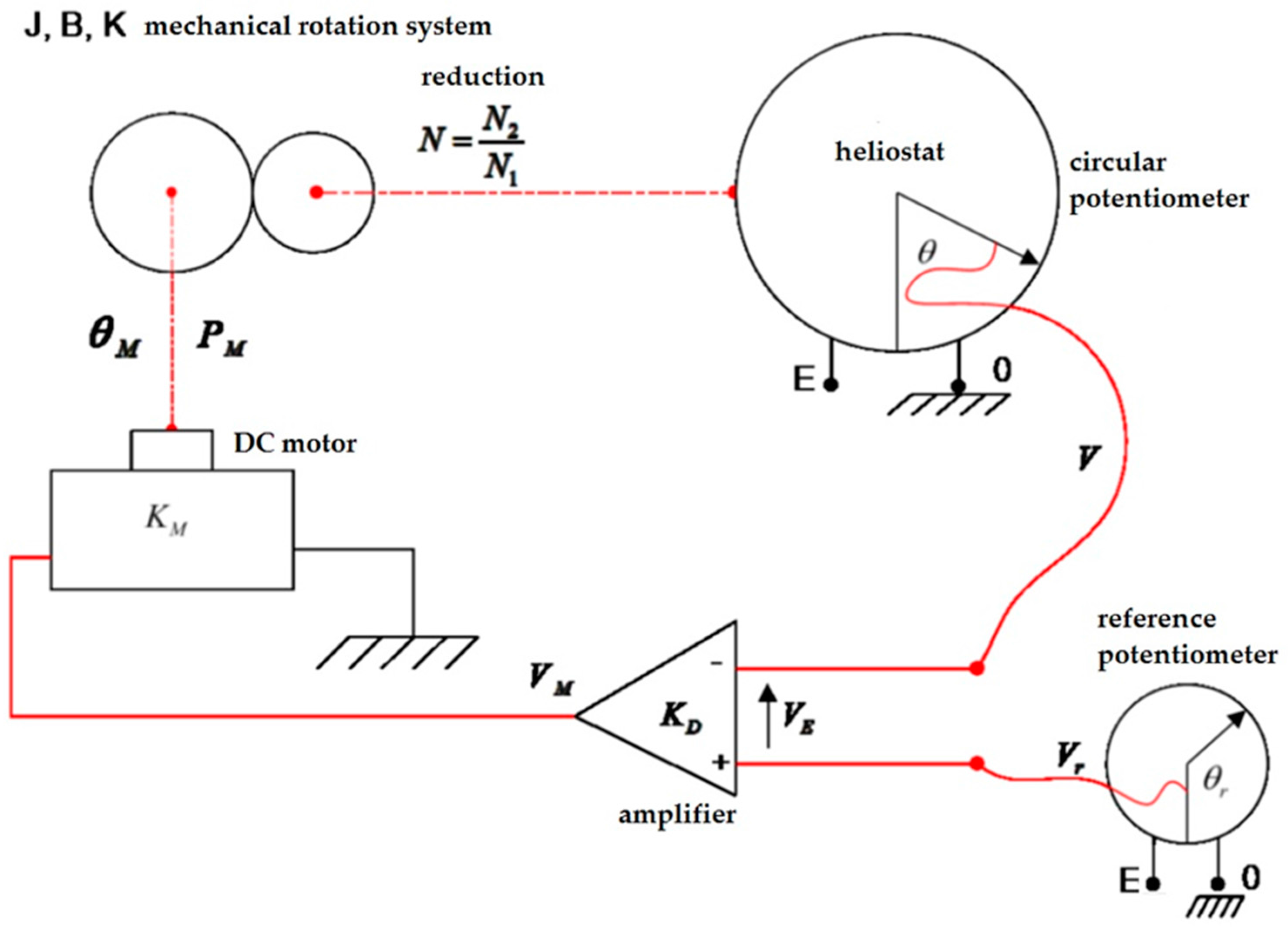
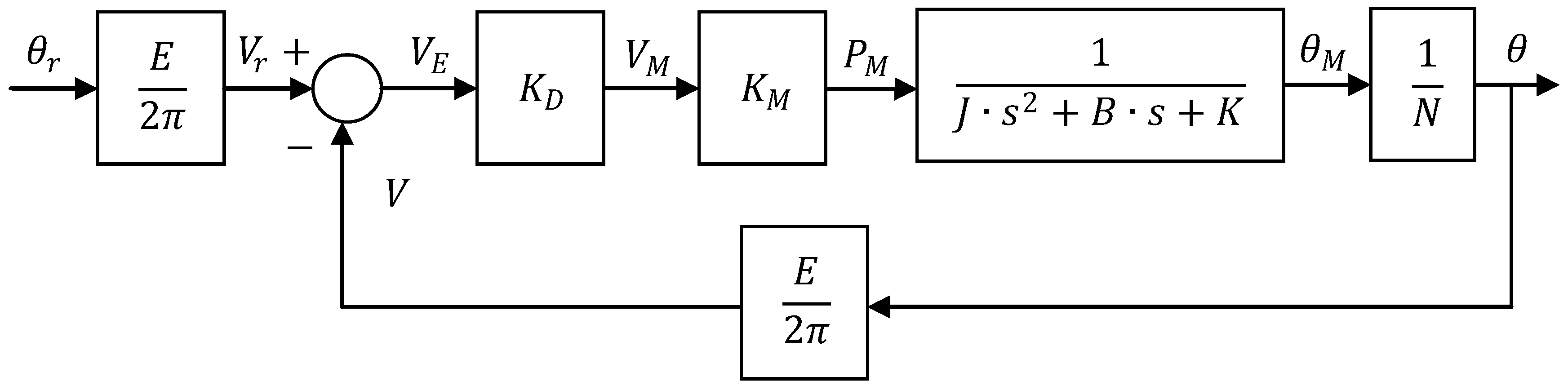
2.3. Tracking System Design and Arrangement
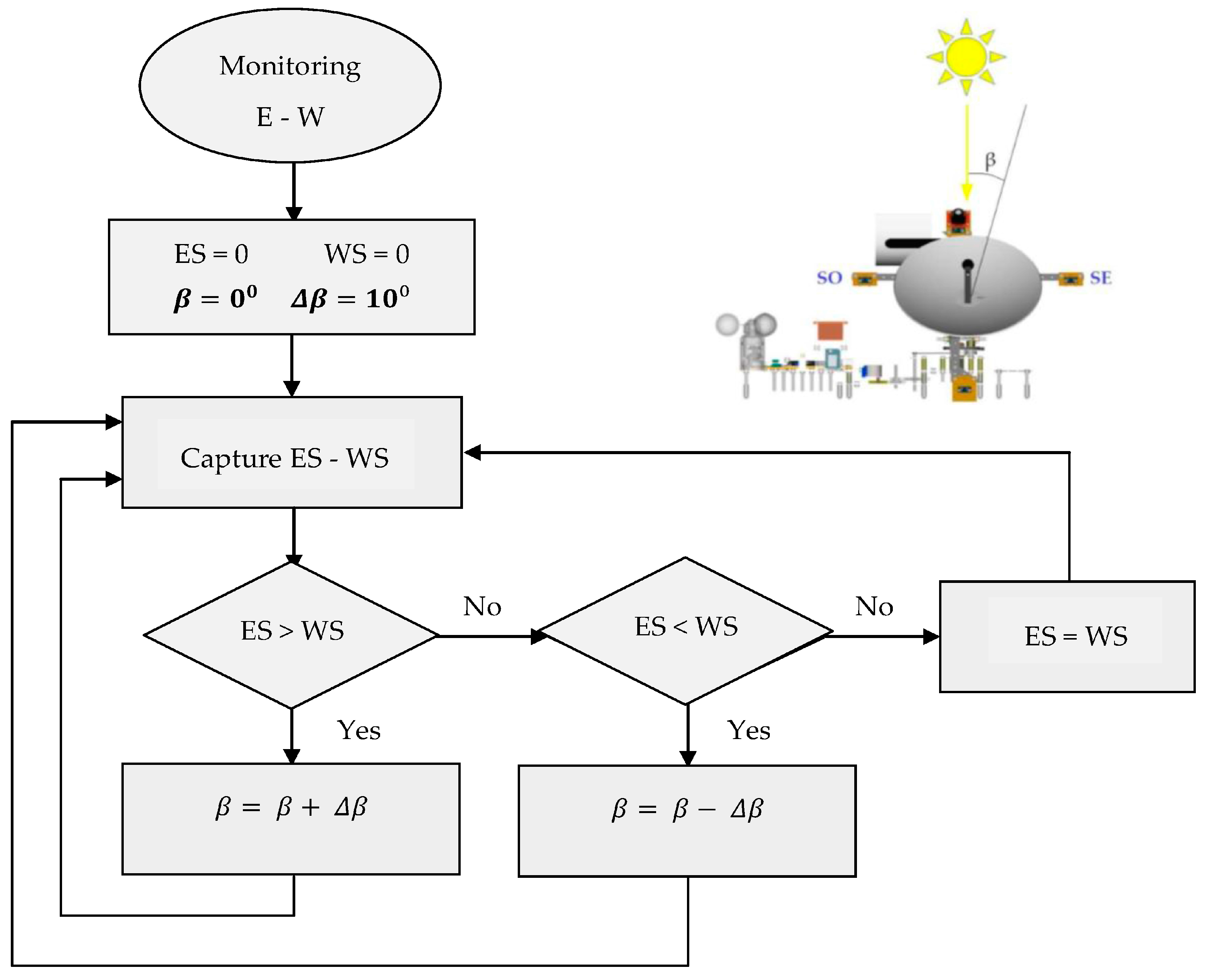
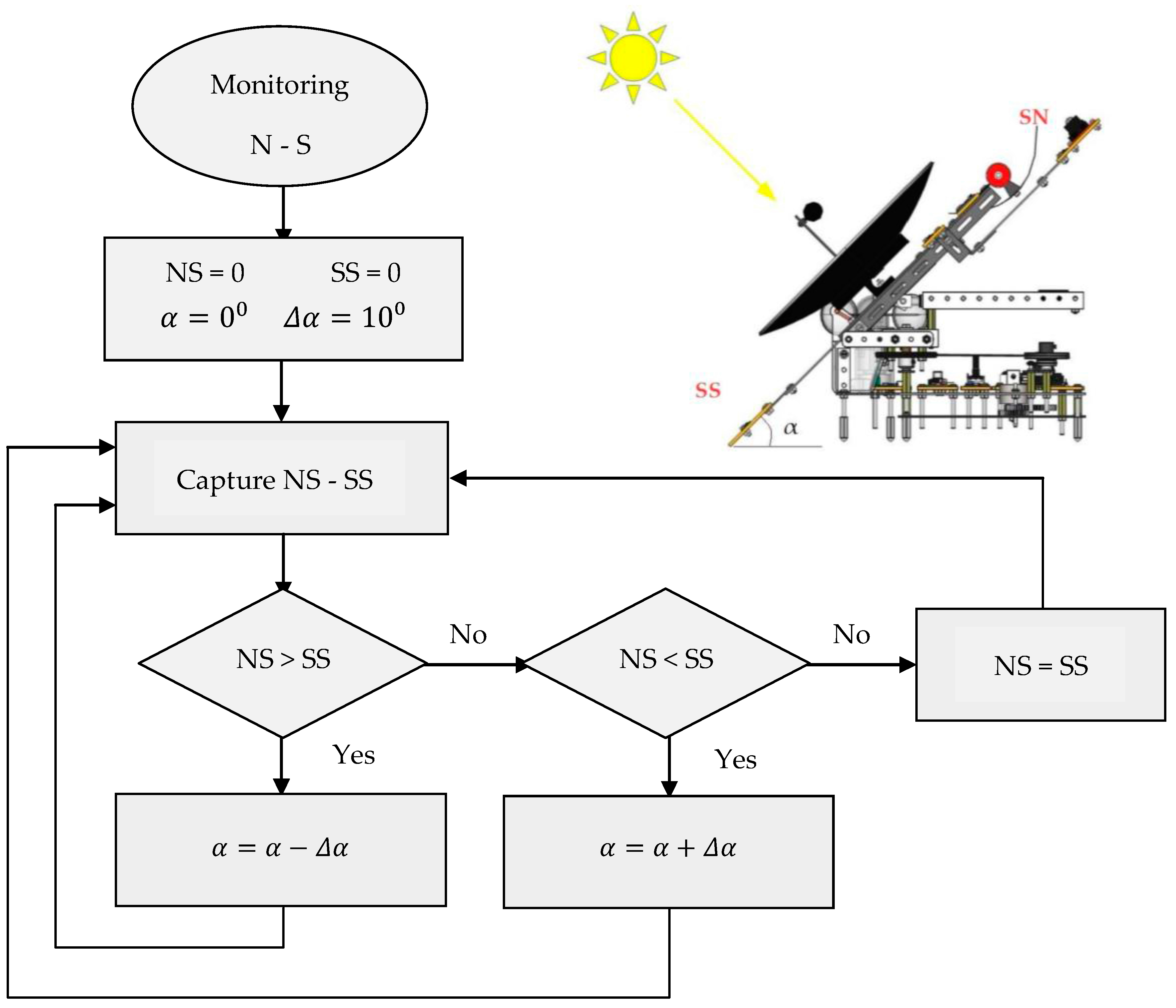
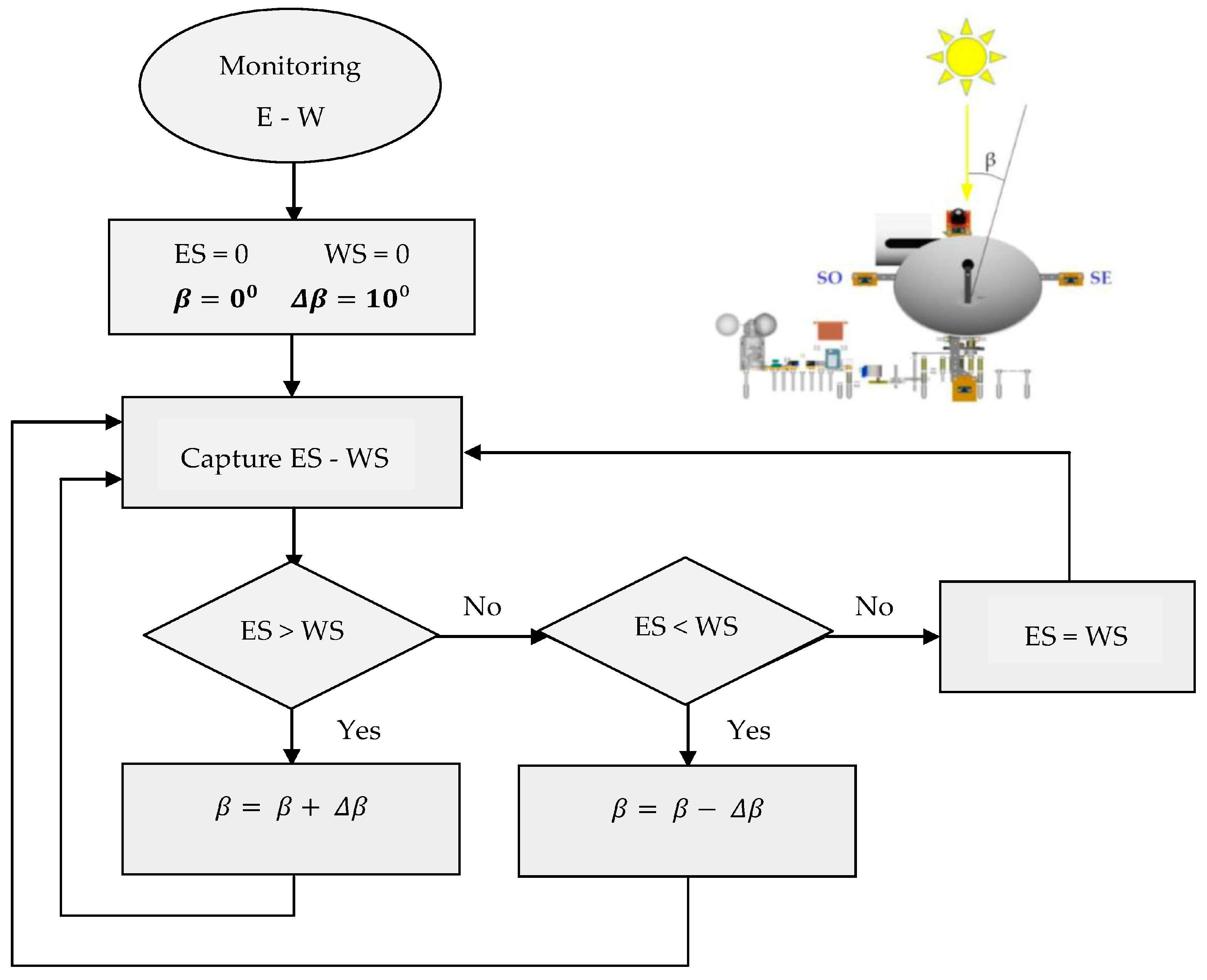
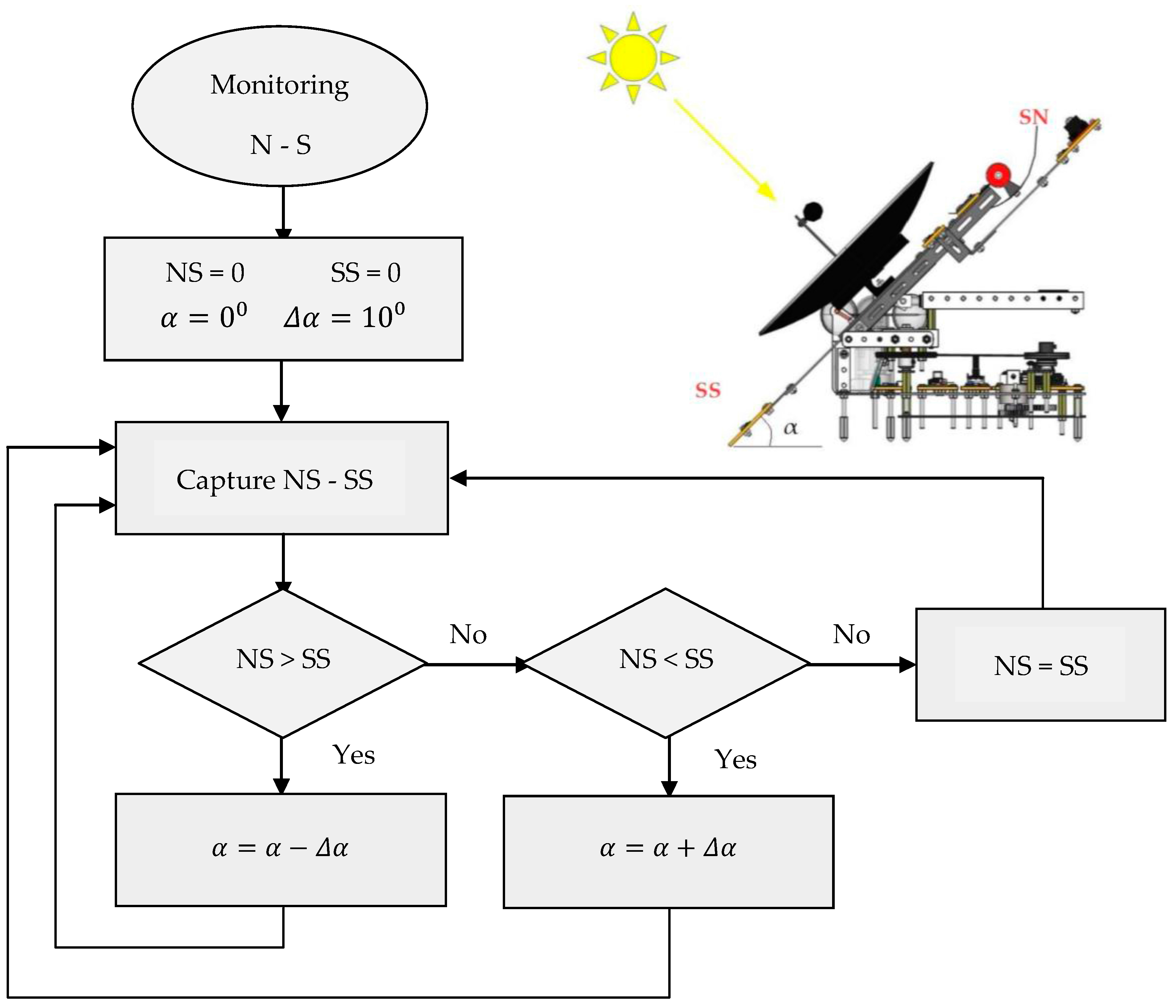
2.4. Definition of the Solar Tracking Algorithm
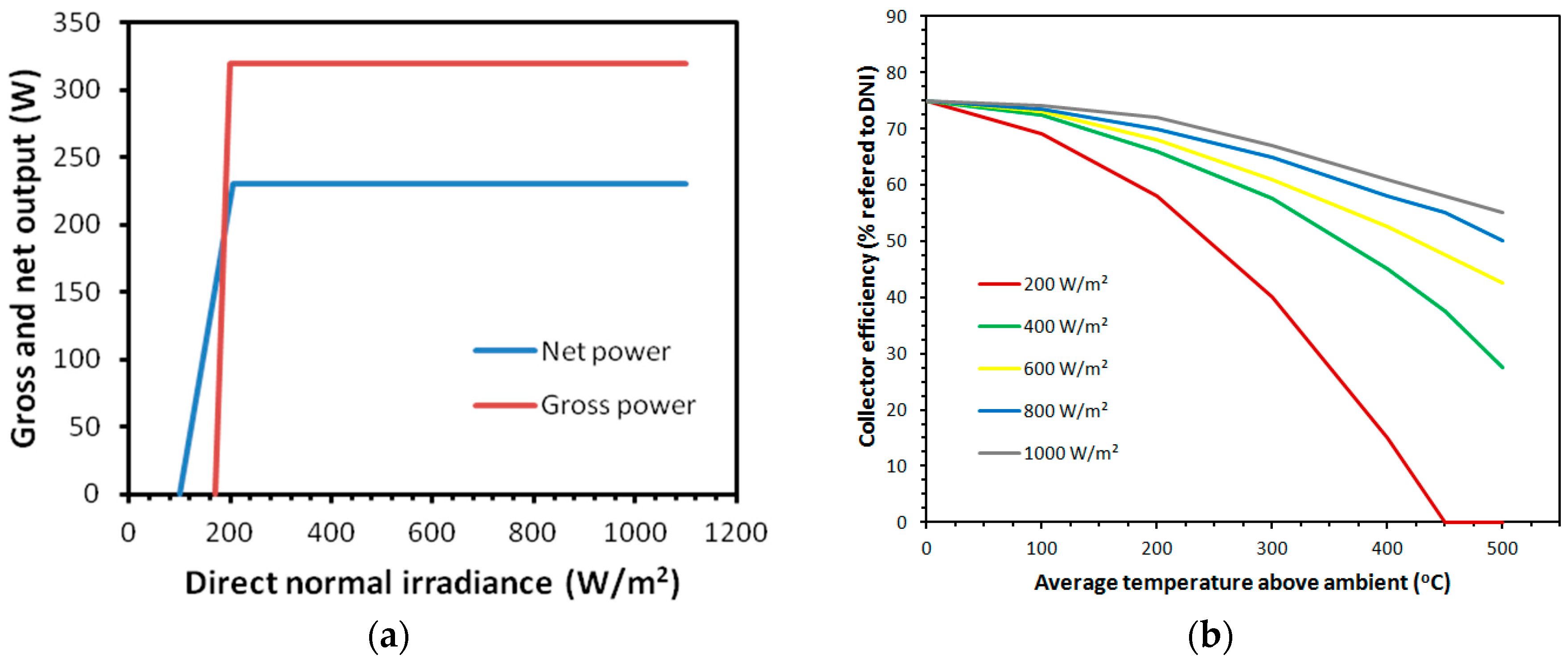
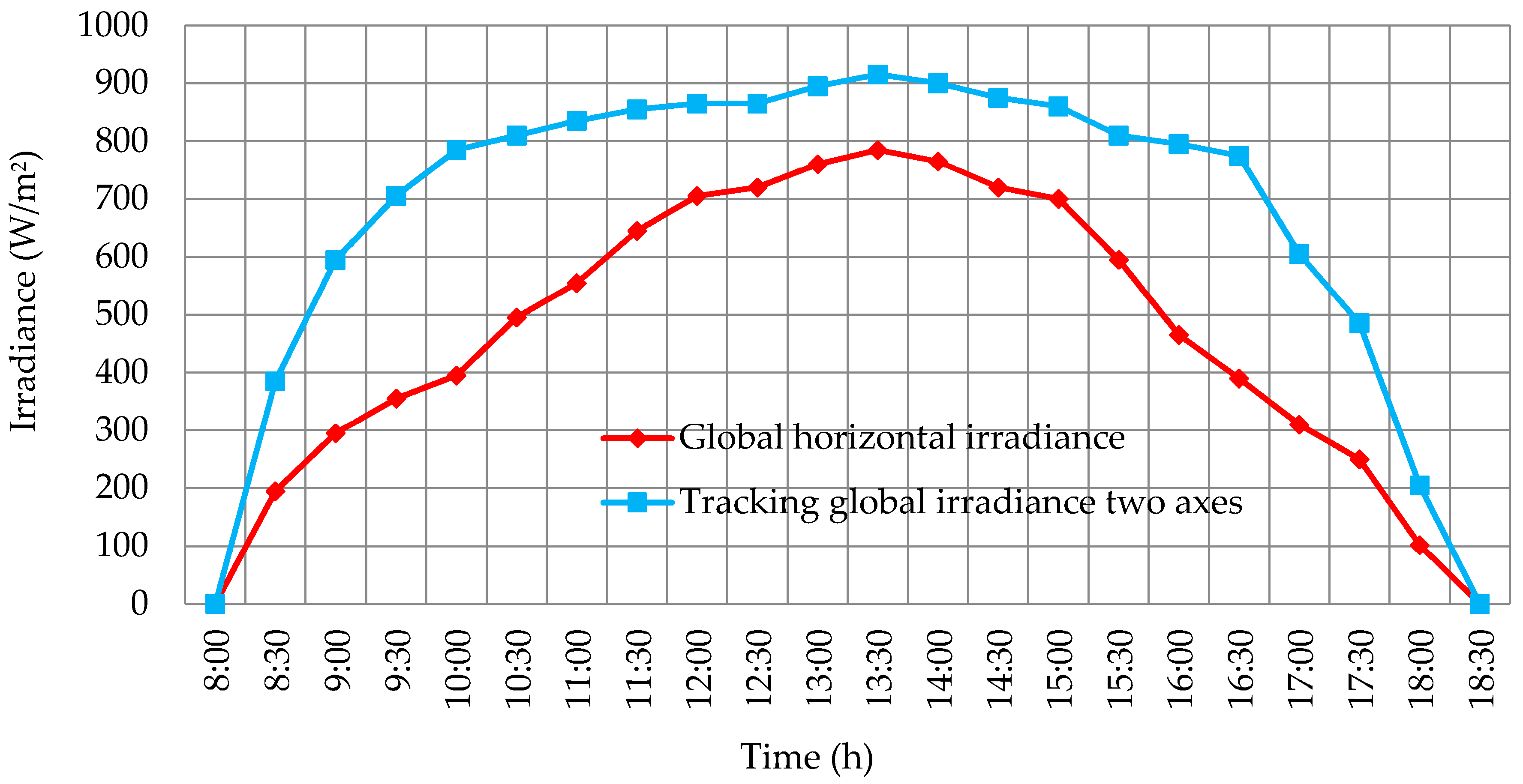
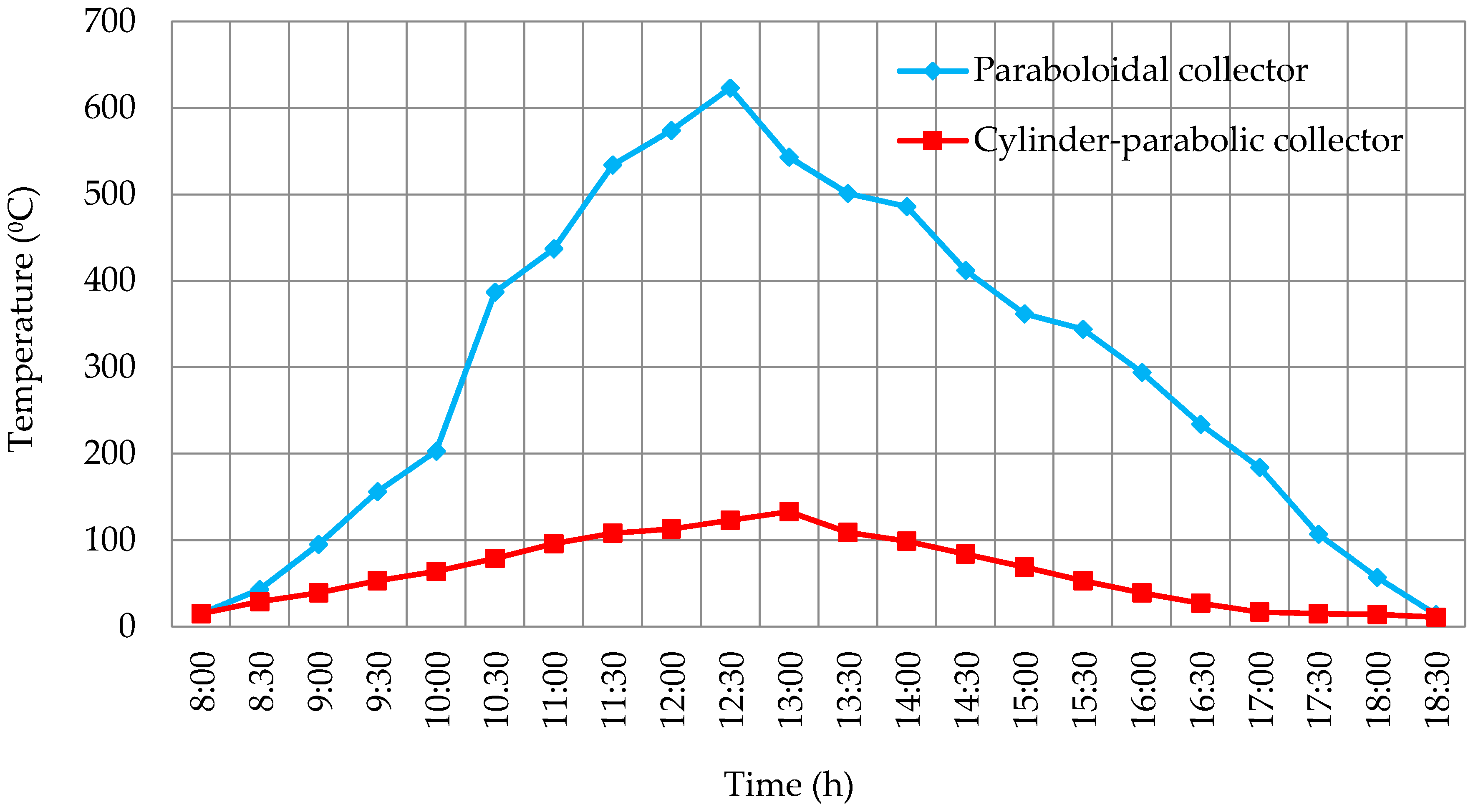
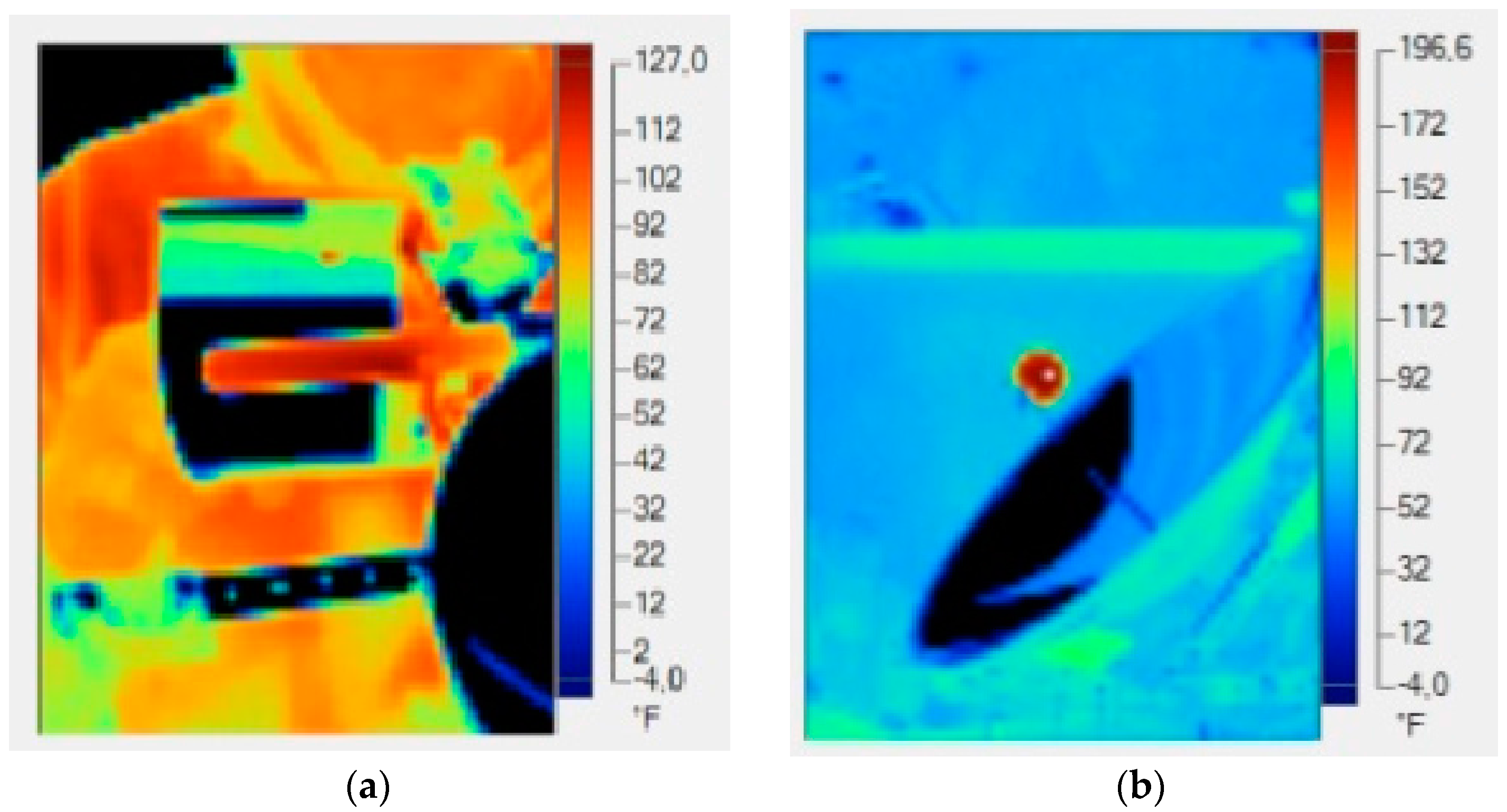
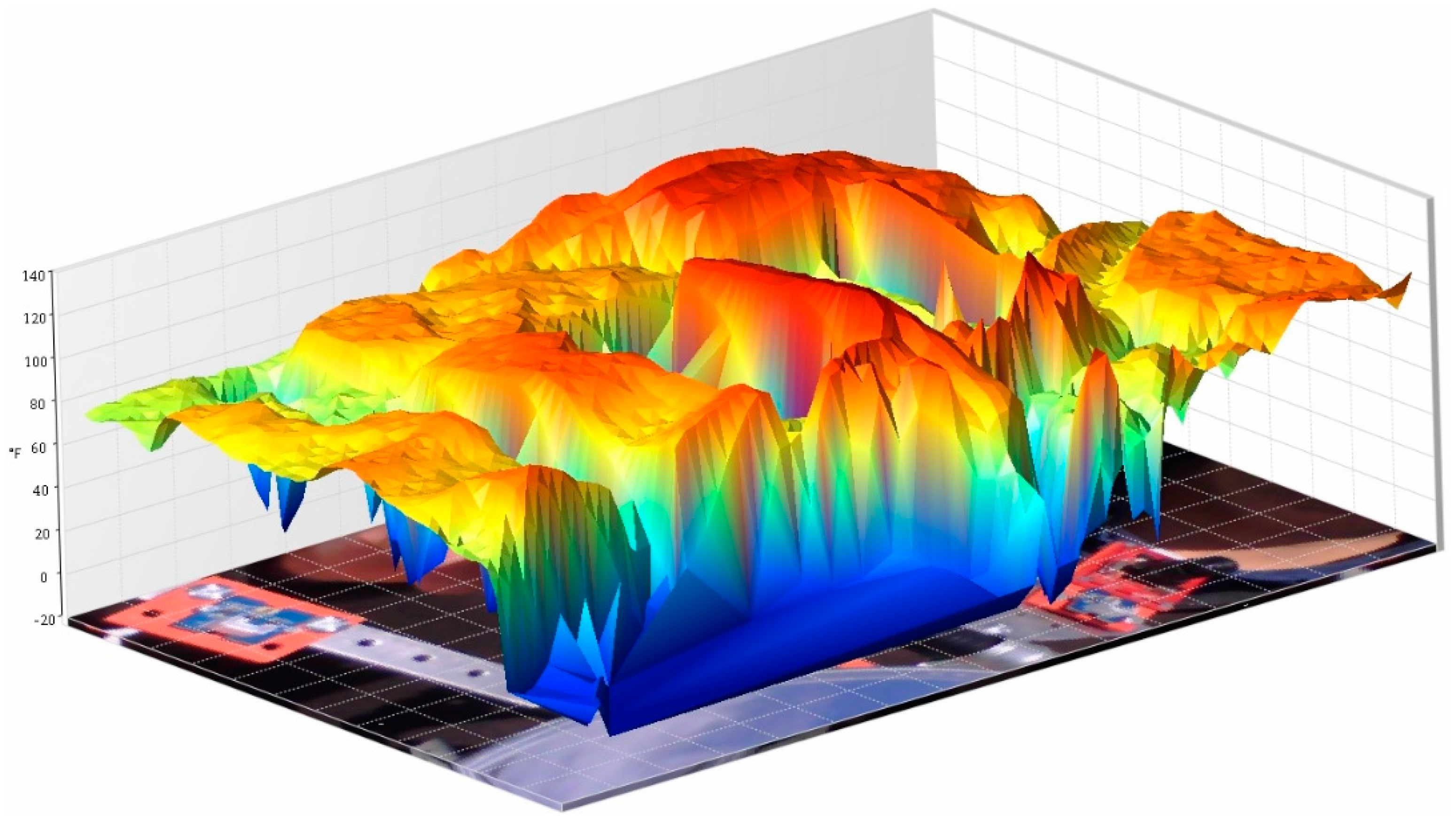
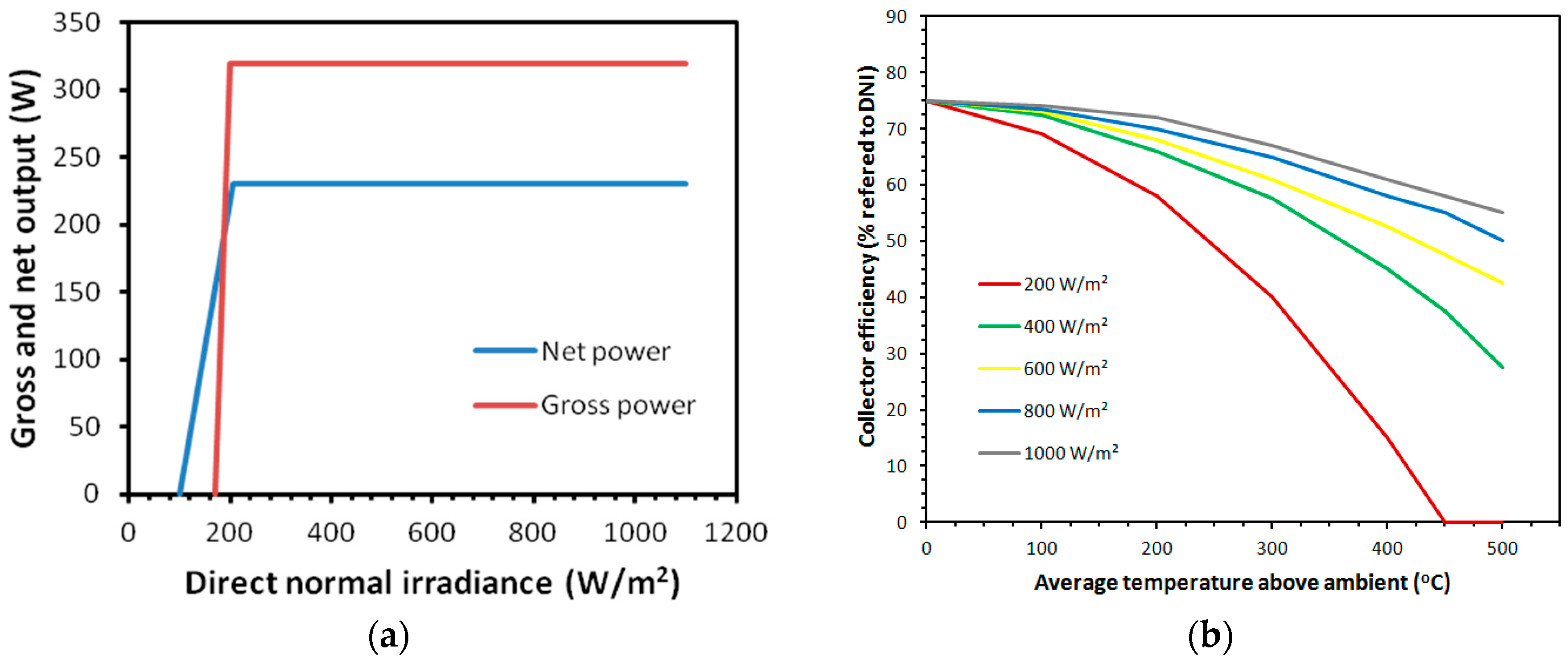
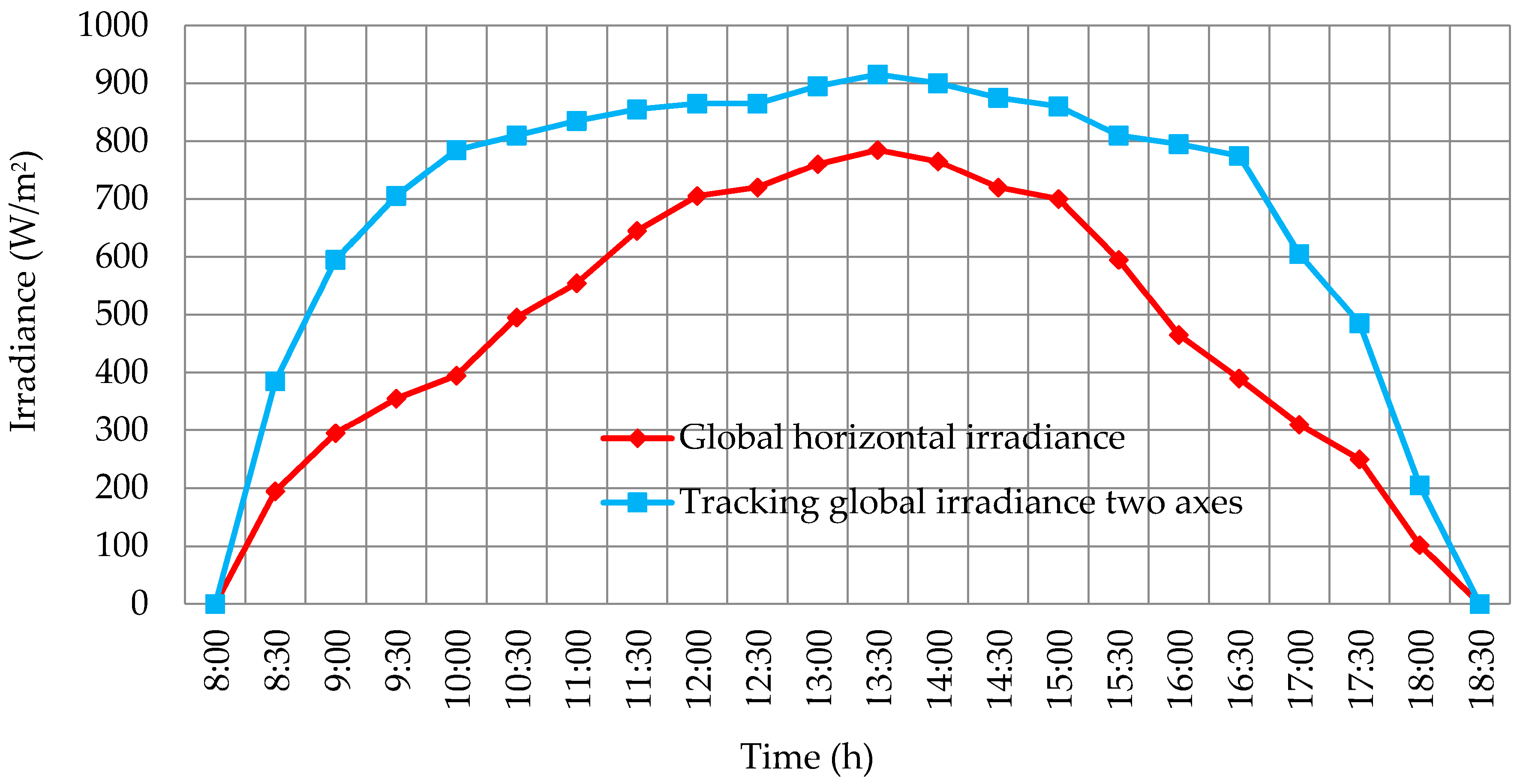
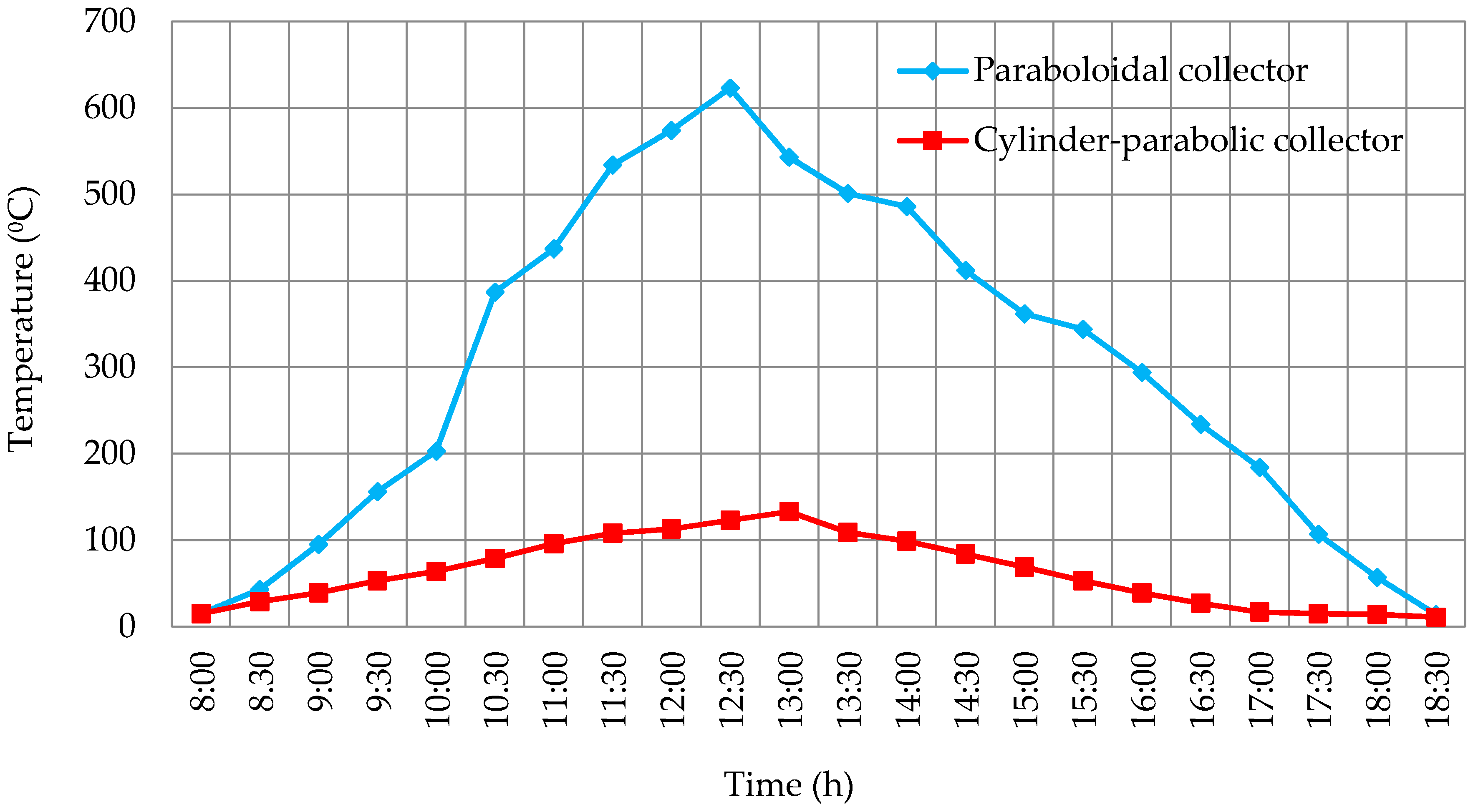
2.5. Energetic Characterization
3. Results
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gil, C.M.; Gil, M.-A.C.; Castro, M.; Santos, C.A.; EIbañez, C.J. Energía Solar Térmica de Media y Alta Temperatura (Monografías Técnicas de Energías Renovables), 1st ed.; PROGENSA-Promotora General de Estudios: Sevilla, Spain, 2001; pp. 1–68. [Google Scholar]
- Imadojemu, H.E. Concentrating parabolic collectors: A patent survey. Energy Convers. Manag. 1995, 36, 225–237. [Google Scholar] [CrossRef]
- Feng, C.; Zheng, H.; Wang, R.; Ma, X. Perfomance investigation of a concentrating photovoltaic/termal system with transmissive Fresnel solarconcentrator. Energy Convers. Manag. 2016, 111, 401–408. [Google Scholar] [CrossRef]
- Ahmadi, M.H.; Sayyadi, H.; Dehghani, S.; Hosseinzade, H. Designing a solar powered Stirling heat engine based on multiple criteria: Maximized thermal efficiency and power. Energy Convers. Manag. 2013, 75, 282–291. [Google Scholar] [CrossRef]
- Arora, R.; Kaushik, S.C.; Kumar, R.; Arora, R. Multi-objective thermo-economic optimization of solar parabolic dish Stirling heat engine with regenerative losses using NSGA-II and decision making. Electr. Power Energy Syst. 2016, 74, 25–35. [Google Scholar] [CrossRef]
- Tlili, I.; Timoumi, I.; Nasrallah, S.B. Thermodynamic analysis of the Stirling heat engine with regenerative losses and internal irreversible. Int. J. Engine Res. 2008, 9, 45–56. [Google Scholar] [CrossRef]
- Aldegheri, F.; Baricordi, S.; Bernardoni, P.; Brocato, M.; Calabrese, G.; Guidi, V.; Mondardini, L.; Pozzetti, L.; Tonezzer, M.; Vincenzi, D. Building integrated low concentration solar system for a self-sustainable Mediterranean villa: The Astonyshine house. Energy Build. 2014, 77, 355–363. [Google Scholar] [CrossRef]
- Mao, Q. Recent developments in geometrical configurations of termal energy storage for concentrating solar power plant. Renew. Sustain. Energy Rev. 2016, 59, 320–327. [Google Scholar] [CrossRef]
- Liu, M.; Steven, T.; Bell, S.; Belusko, M.; Jacob, R.; Will, G.; Saman, W.; Bruno, F. Review on concentrating solar power plants and new developmentes in high temperatura termal energy storage technologies. Renew. Sustain. Energy Rev. 2016, 53, 1411–1432. [Google Scholar] [CrossRef]
- Lamnatou, C.; Mondol, J.D.; Chemisana, D.; Maurer, C. Modelling and simulation of Building-Integrated solar thermal systems: Behaviour of the system. Renew. Sustain. Energy Rev. 2015, 45, 36–51. [Google Scholar] [CrossRef]
- Bakos, G.C. Design and construction of a two-axis Sun tracking system for parabolic trough collector (PTC) efficiency improvement. Renew. Energy 2006, 31, 2411–2421. [Google Scholar] [CrossRef]
- Skouri, S.; Ben Haj, A.; Bouadila, S.; Ben Salah, M.; Ben Nasrallah, S. Design and construction of sun tracking systems for solar parabolic concentrator displacement. Renew. Sustain. Energy Rev. 2016, 60, 1419–1429. [Google Scholar] [CrossRef]
- Chong, K.K.; Wong, C.W. General formula for on-axis sun tracking system and its application in improving tracking accuracy of solar collector. Sol. Energy 2009, 83, 289–305. [Google Scholar] [CrossRef]
- Reda, I.; Andreas, A. Solar position algorithm for solar radiation applications. Sol. Energy 2004, 76, 577–589. [Google Scholar] [CrossRef]
- Beltrán, J.A.; González, J.L.S.; García-Beltrán, C.D. Design, manufacturing and performance test of a solar tracker made by an embedded control. In Proceedings of the Electronics Engineering, Robotics and Automotive Mechanics Conference (CERMA 2007), Cuernavaca, Morelos, Mexico, 25–28 September 2007; pp. 129–134.
- Chen, Y.T.; Lim, B.H.; Lim, C.S. General sun tracking formula for heliostats with arbitrarily oriented axes. J. Sol. Energy Eng. 2006, 121, 245–250. [Google Scholar] [CrossRef]
- Falck, D.Y.; Colle`e, B. Freecad [How-To], 1st ed.; Packt Publishing: London, UK, 2012; pp. 1–70. [Google Scholar]
- Warren, J.-D.; Adams, J.Y.; Molle, H. Arduino Robotics, 1st ed.; Apress: New York, NY, USA, 2001; pp. 1–180. [Google Scholar]
- Salamone, F.; Belussi, L.; Danza, L.; Ghellere, M.Y.; Meroni, I. An open source low-cost wireless control system for a forced circulation solar plant. Sensors 2015, 15, 27990–28004. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Terminology | Function |
|---|---|
| Arduino Mega 2560 ADK | Programmable electronic controller of the solar tracker, 256 Kb |
| Pololu Nema 17 | Bipolar step by step motor 3.2 kg·cm torque and step angle 1.8°, to azimuthal tracking |
| Firgelli L12-100-100-6R | Linear actuator up to 17 mm/s and forces higher than 30 N for elevation tracking |
| SeedStudio |
|
| Adafruit Max6675 | Temperature sensor (up to 500 °C) and signal amplifier |
| Todoelectrónica 6710 WIND02 | Windmeter (speed of wind 10 km/h = 4 turns/s) |
| Ventus Ciencia and PHYWE | Paraboloidal and parabolic trough collectors, respectively |
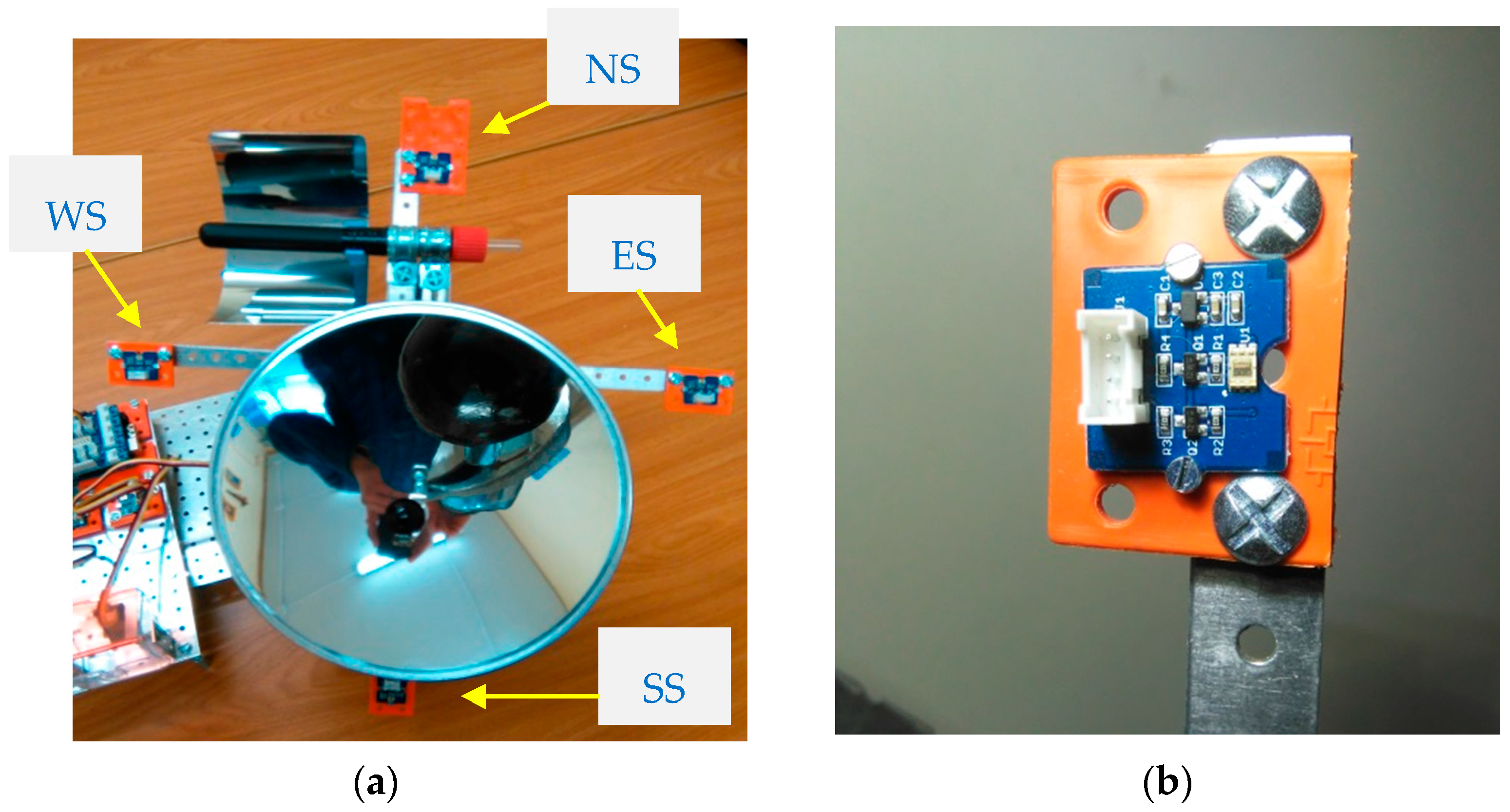
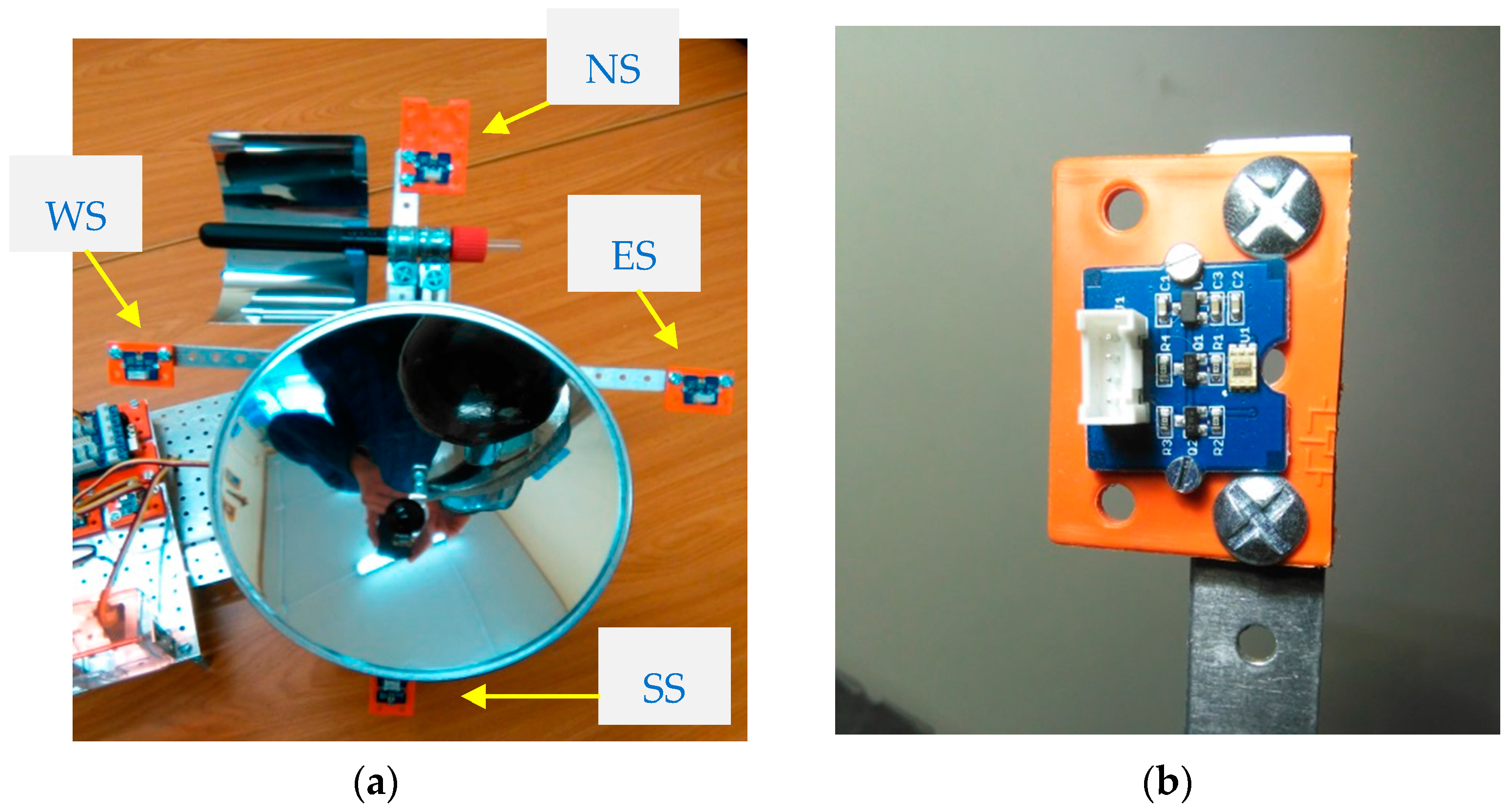
| Abbreviation | Sensor |
|---|---|
| NS | North Sensor, located in the upper part of the CSP solar tracker |
| SS | South Sensor, located in the lower part of the CSP solar tracker |
| ES | East Sensor, located in the right part of the CSP solar tracker |
| WS | West Sensor, located in the left part of the CSP solar tracker |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Morón, C.; Díaz, J.P.; Ferrández, D.; Ramos, M.P. Mechatronic Prototype of Parabolic Solar Tracker. Sensors 2016, 16, 882. https://doi.org/10.3390/s16060882
Morón C, Díaz JP, Ferrández D, Ramos MP. Mechatronic Prototype of Parabolic Solar Tracker. Sensors. 2016; 16(6):882. https://doi.org/10.3390/s16060882
Chicago/Turabian StyleMorón, Carlos, Jorge Pablo Díaz, Daniel Ferrández, and Mari Paz Ramos. 2016. "Mechatronic Prototype of Parabolic Solar Tracker" Sensors 16, no. 6: 882. https://doi.org/10.3390/s16060882
APA StyleMorón, C., Díaz, J. P., Ferrández, D., & Ramos, M. P. (2016). Mechatronic Prototype of Parabolic Solar Tracker. Sensors, 16(6), 882. https://doi.org/10.3390/s16060882