
Piezoresistive Soft Condensed Matter Sensor for Body-Mounted Vital Function Applications


Abstract
:1. Introduction
1.1. Conventional Sensor Design
1.2. Limitations of Conventional Sensors Design
1.3. Hand- and Textile-Mounted Sensors
1.4. Polymer Piezoresistive Sensors
1.5. Current Work: Band Sensor Design
2. Experimental Section
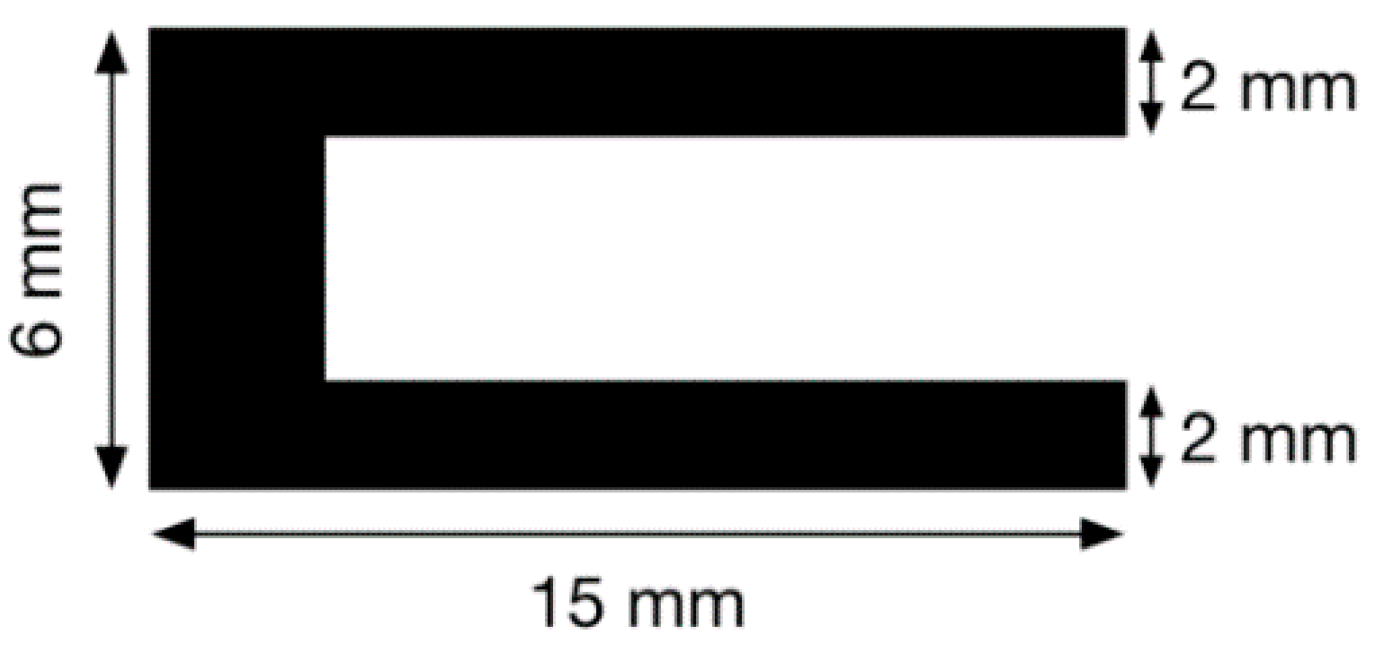
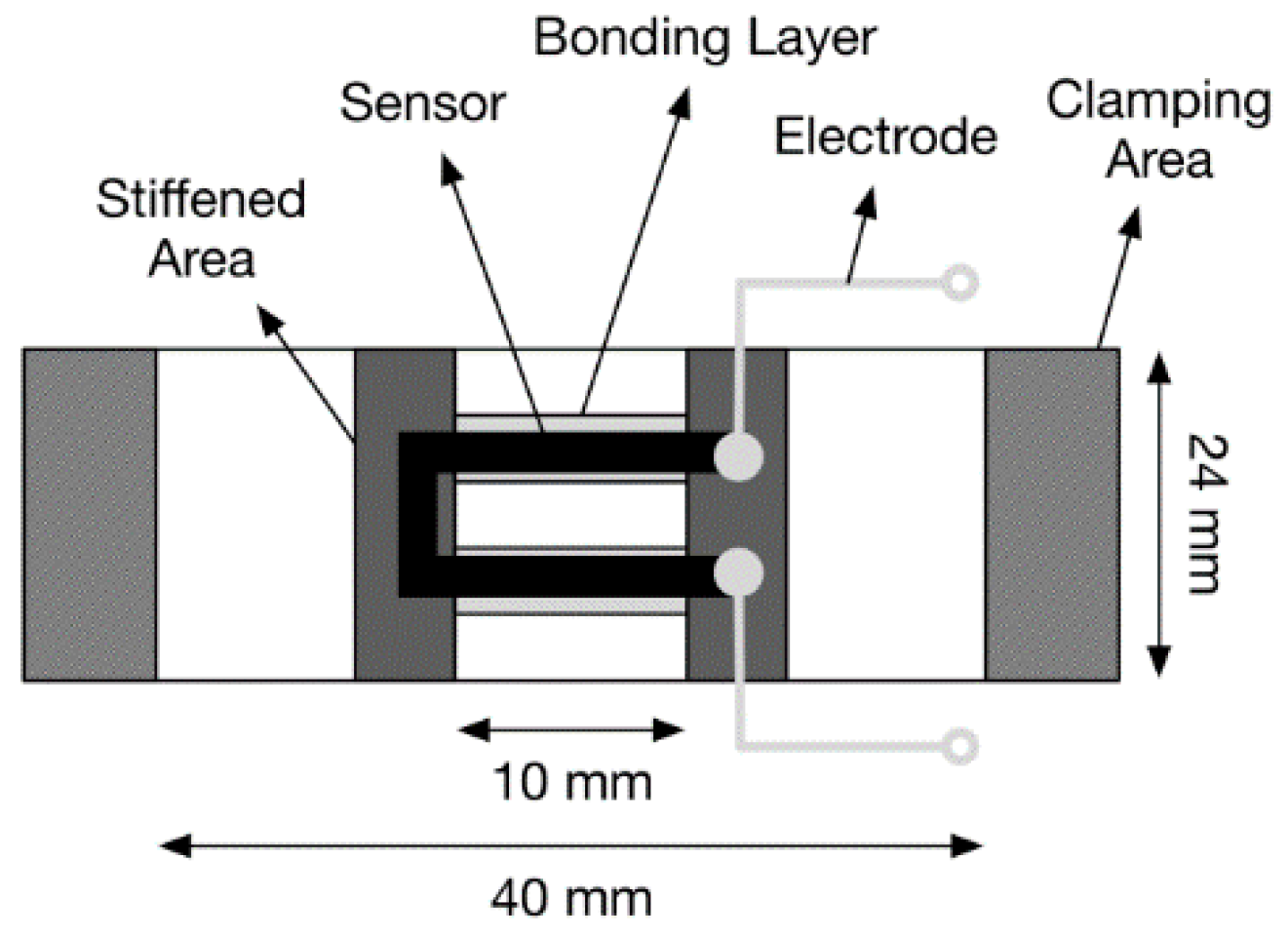
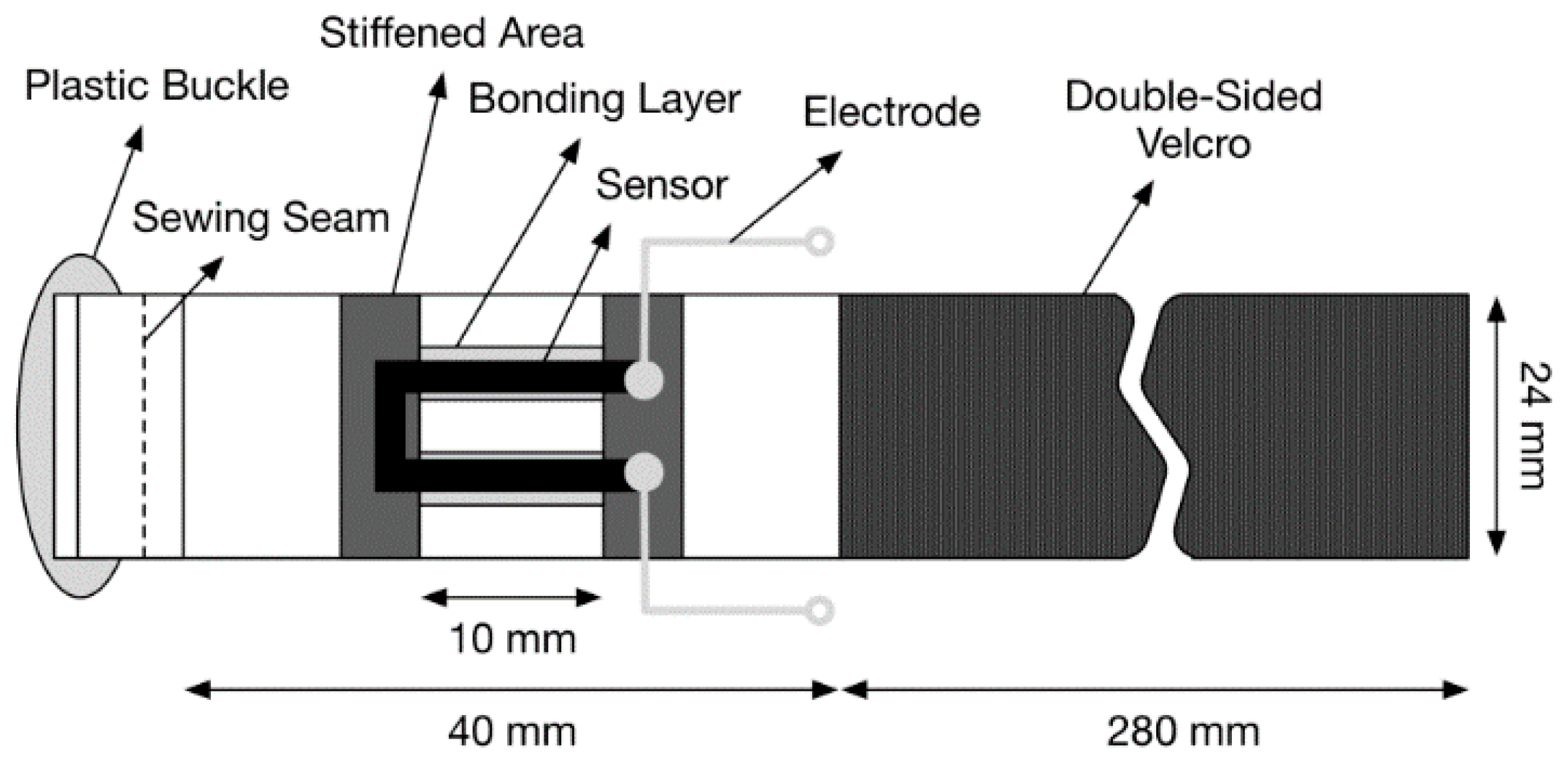
2.1. Band Sensor Production
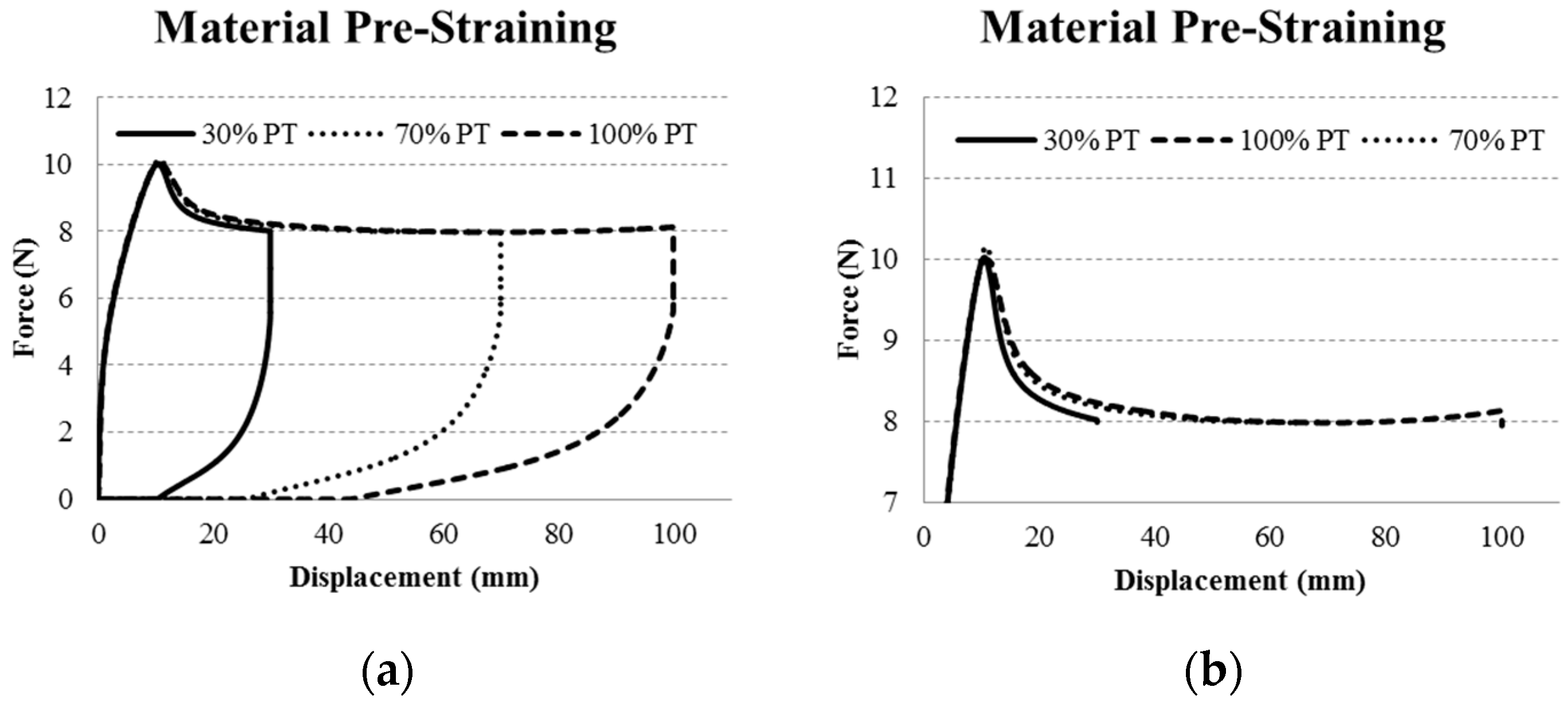
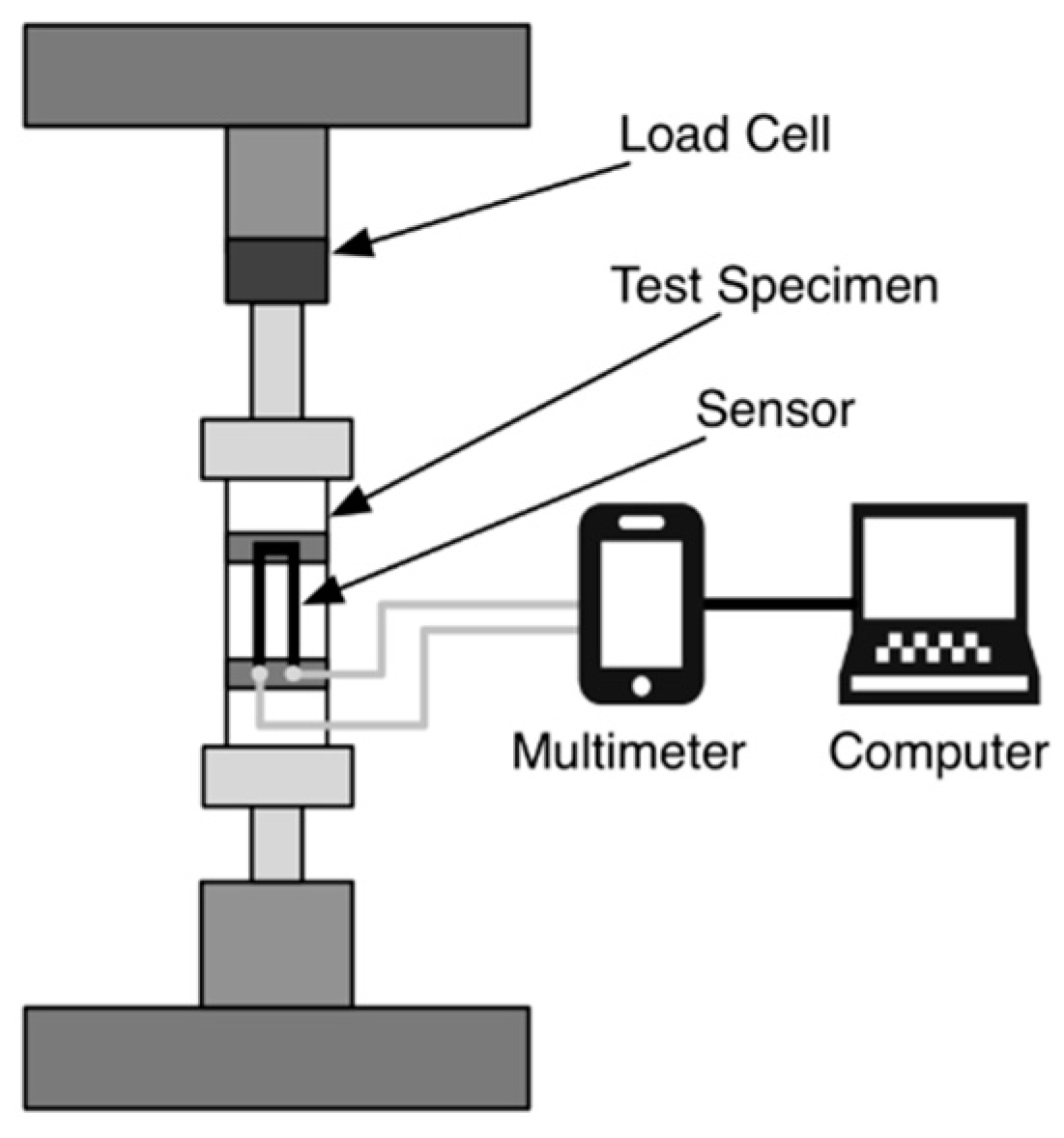
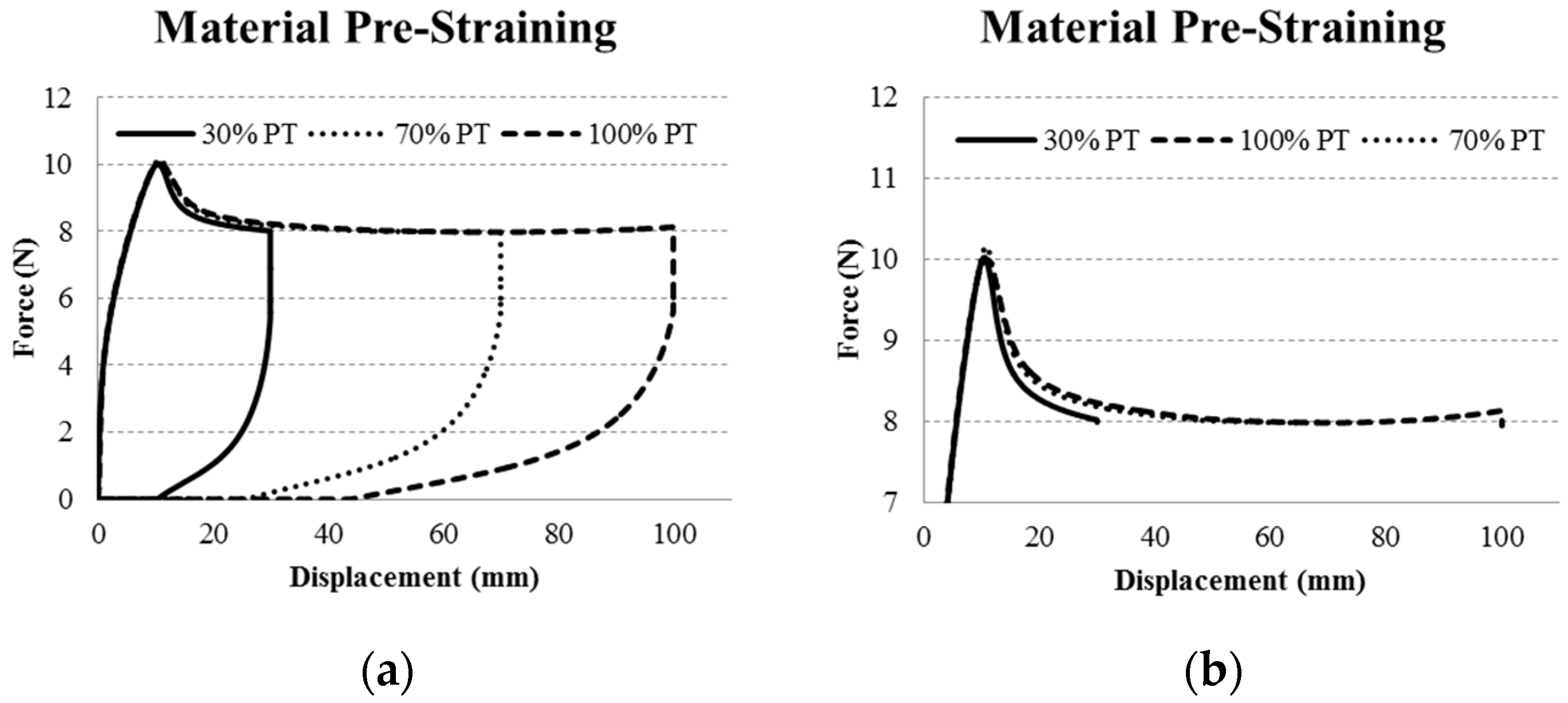
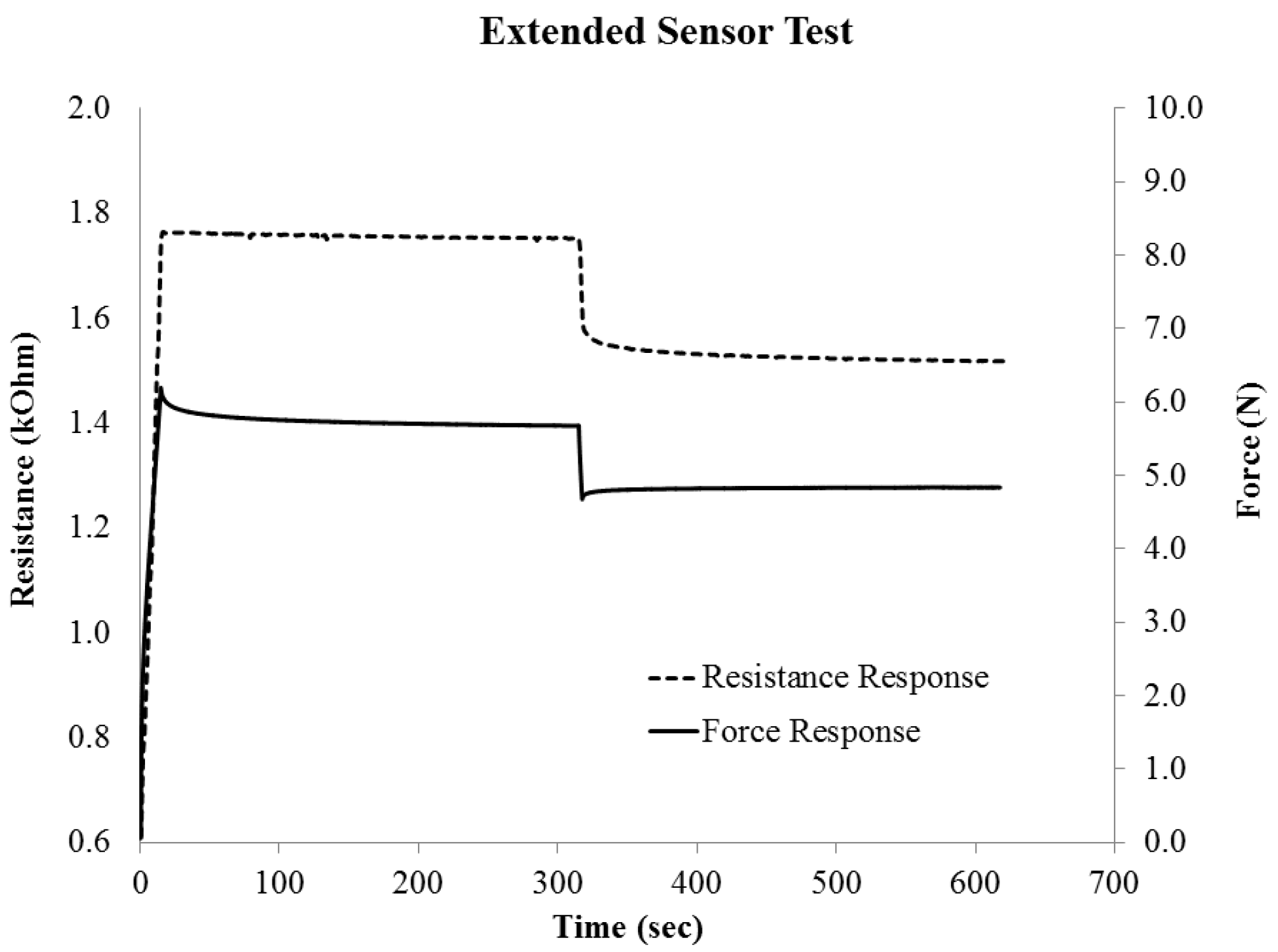
2.2. Mechanical Tensile Testing
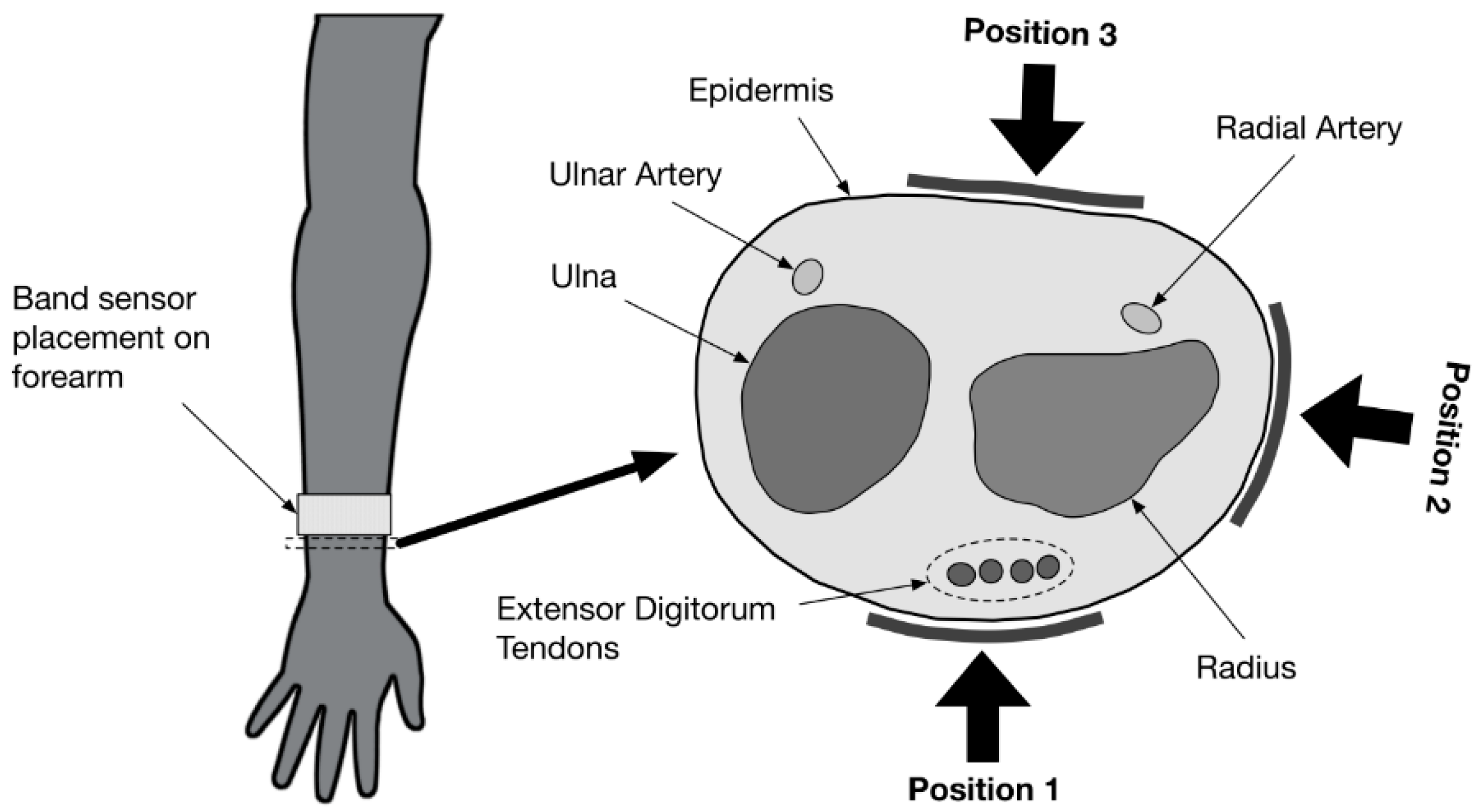
2.3. Band Sensor Mounting Positioning on the Wrist
2.4. Pulse Wave Detection
2.5. Motion Detection Test Setup
3. Results and Discussion
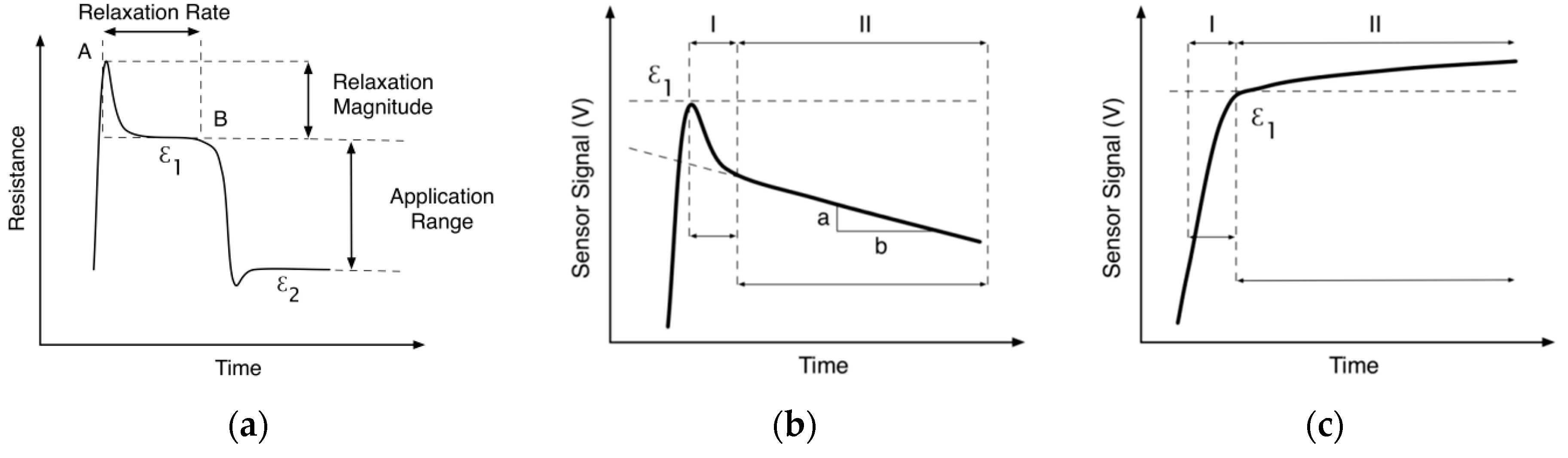
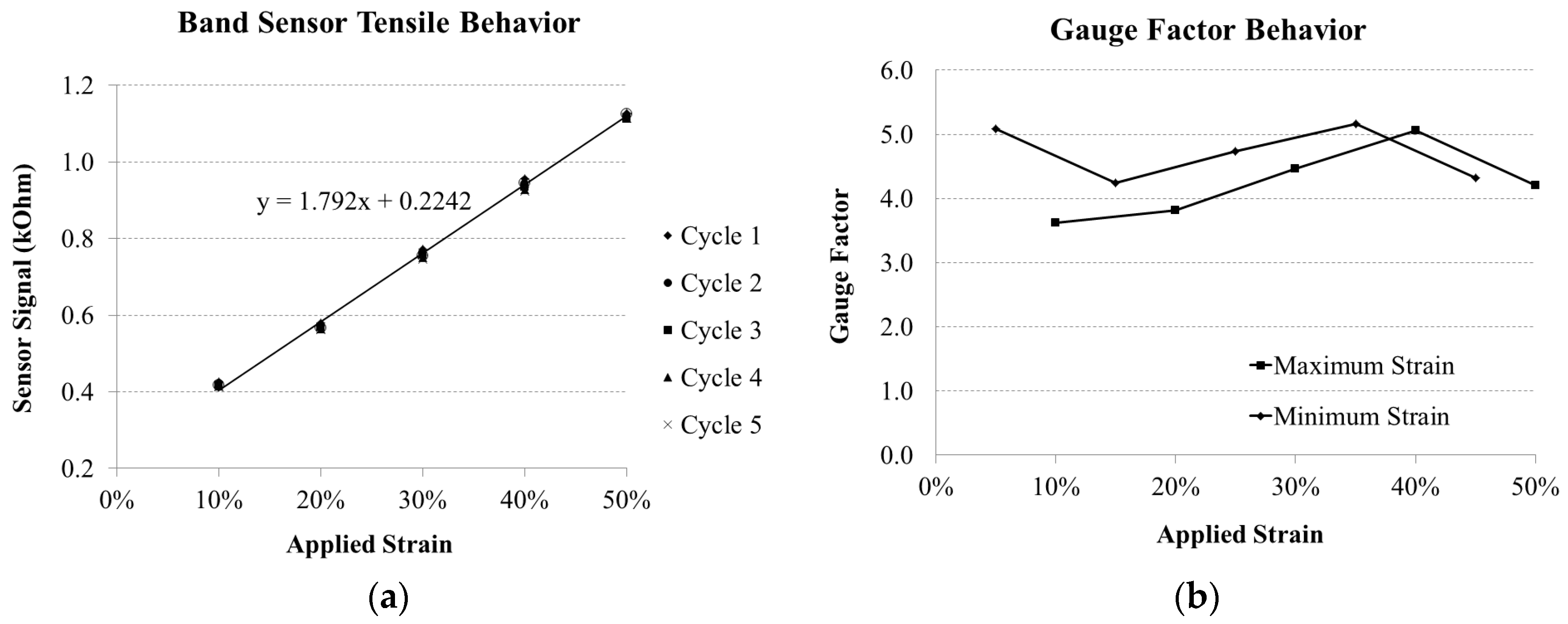
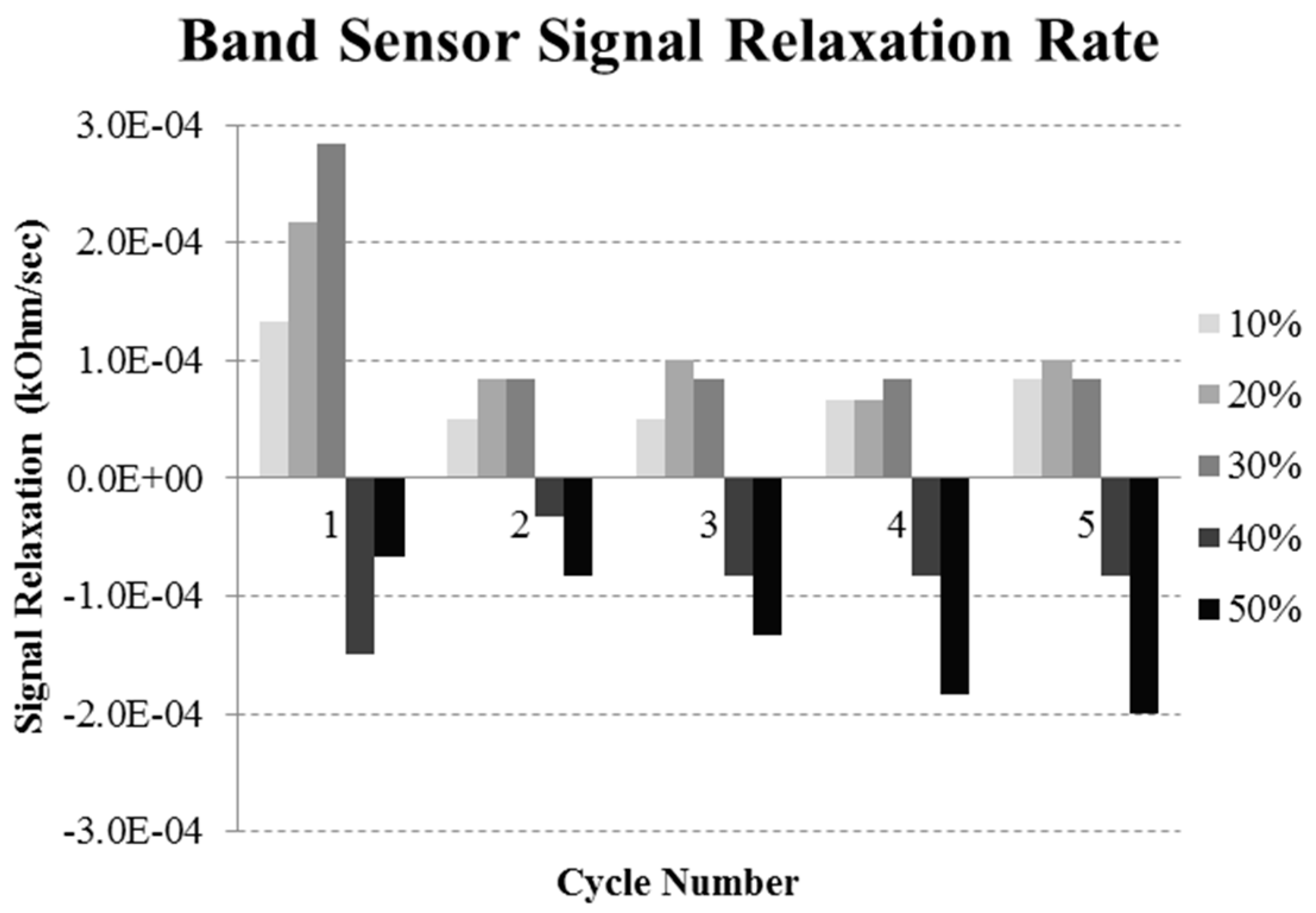
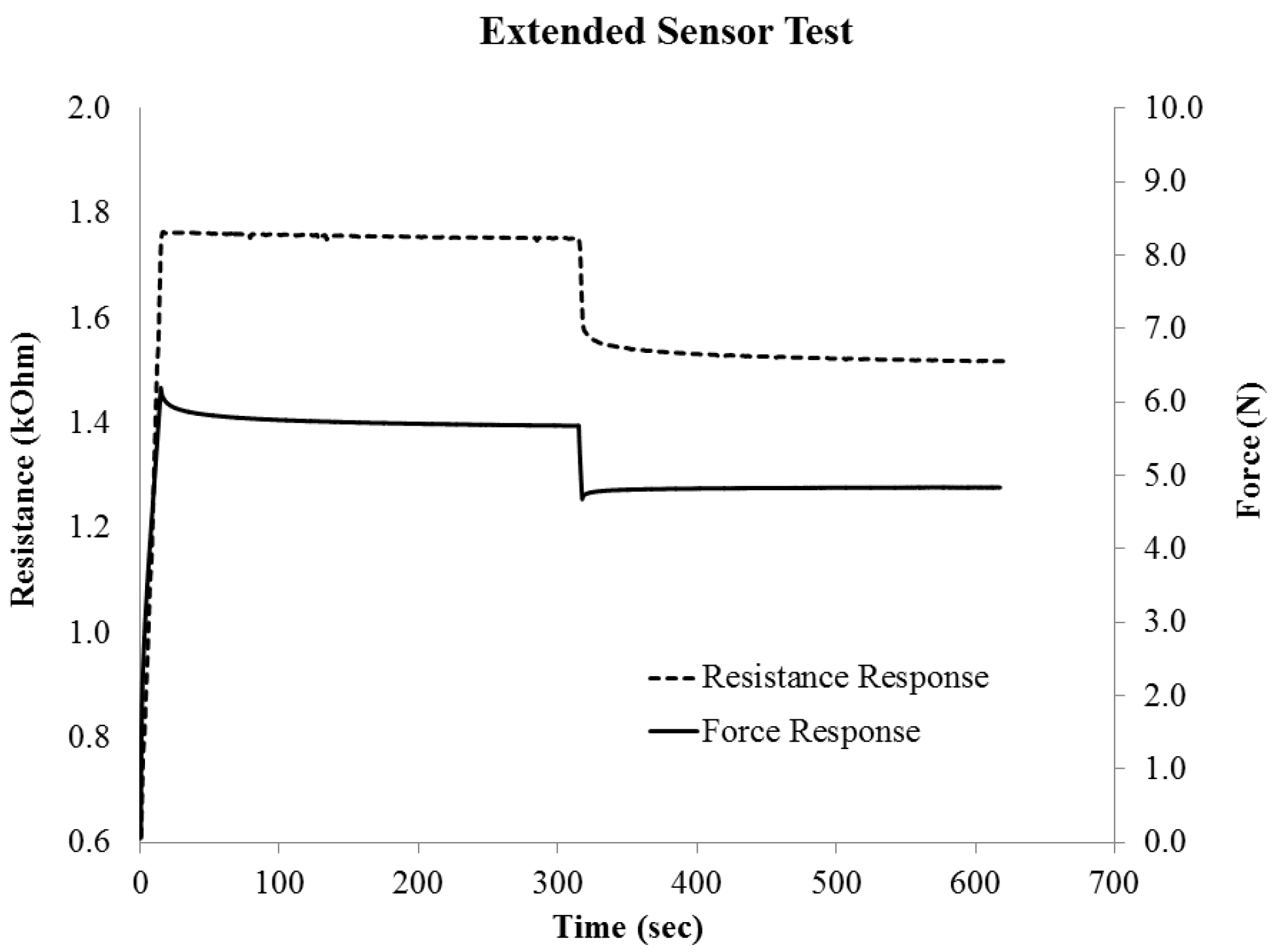
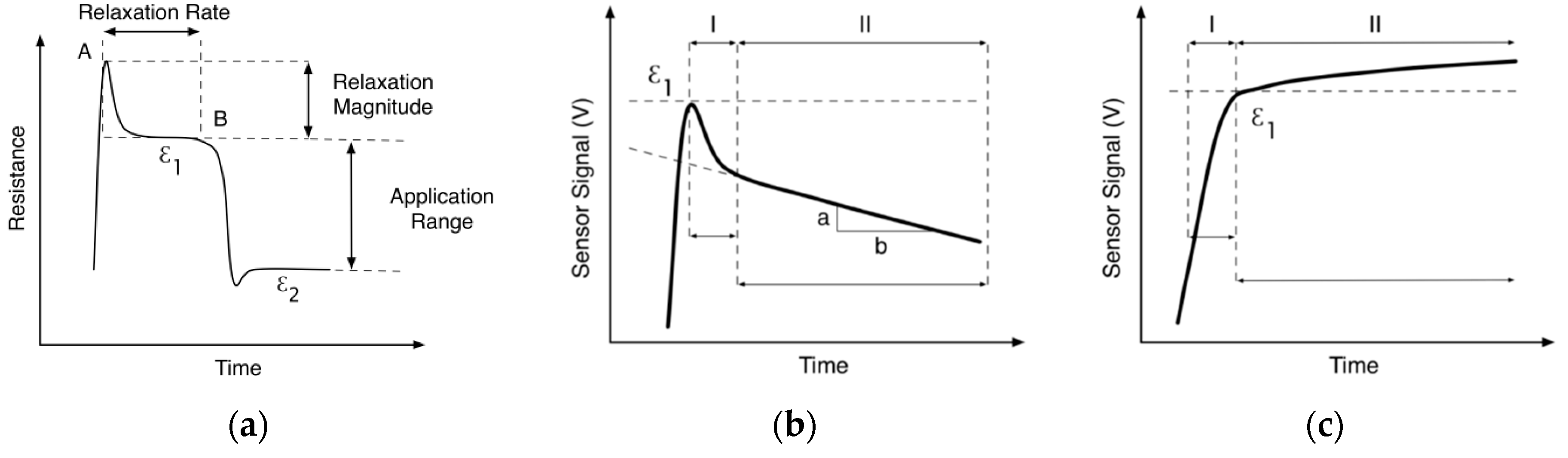
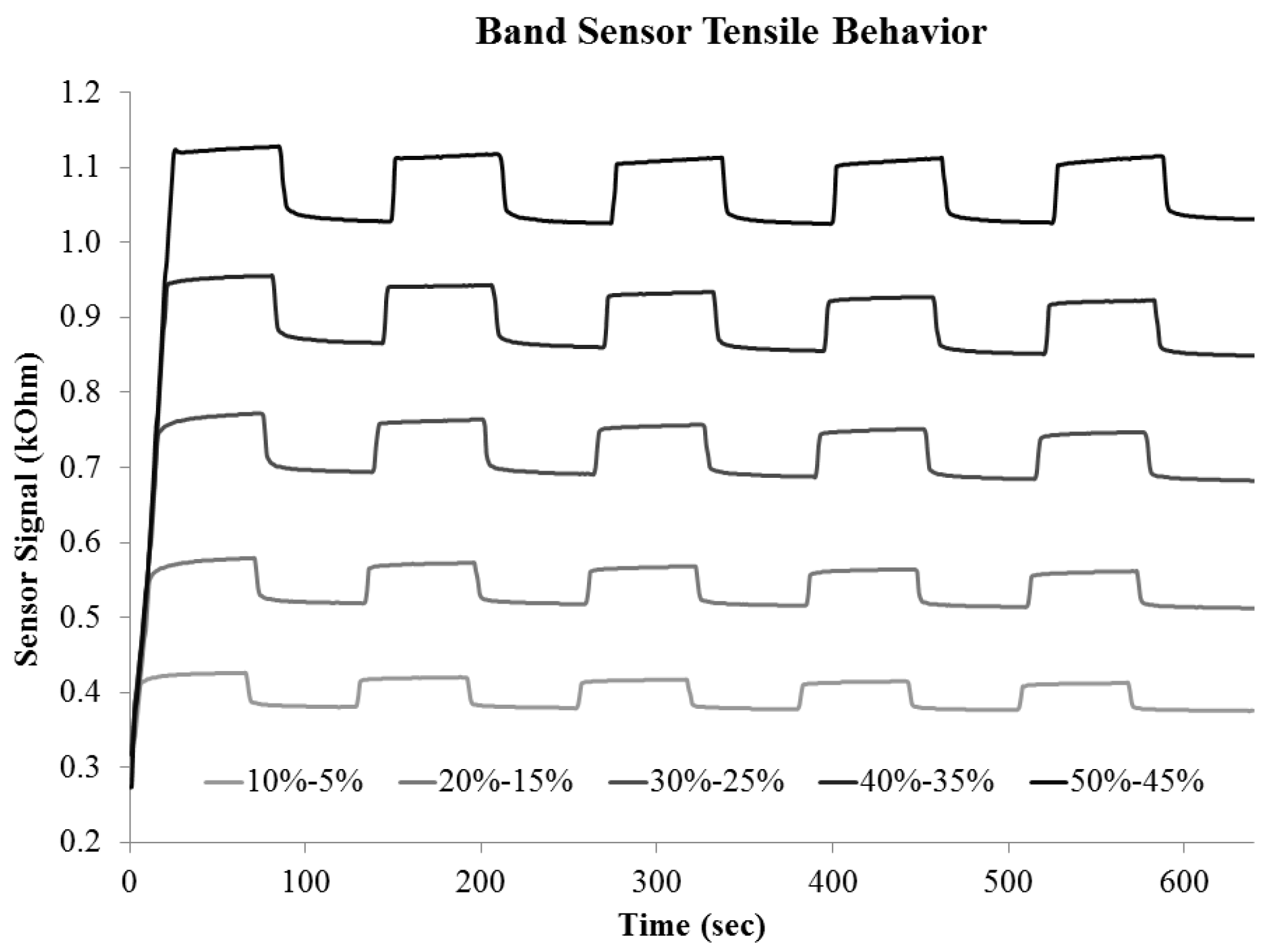
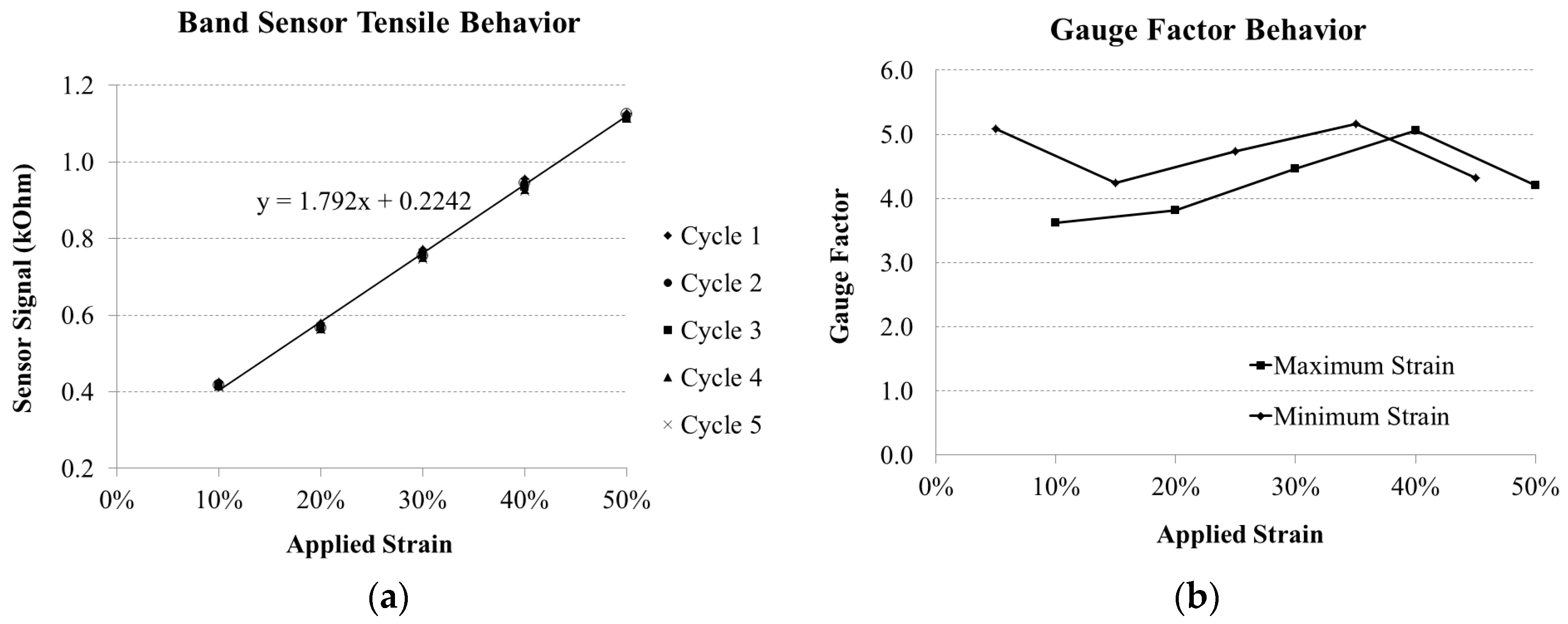
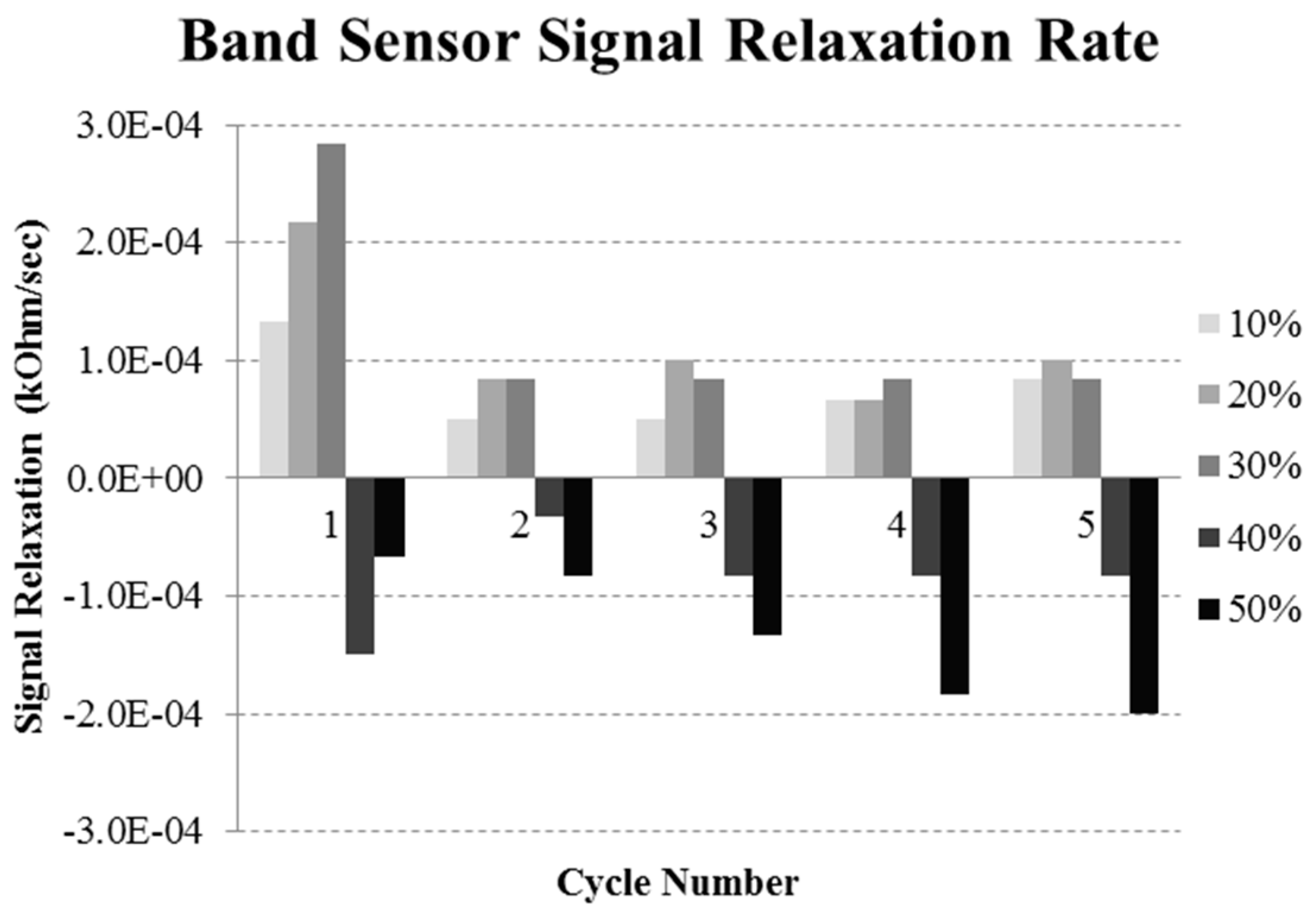
3.1. Band Sensor Signal Characterization
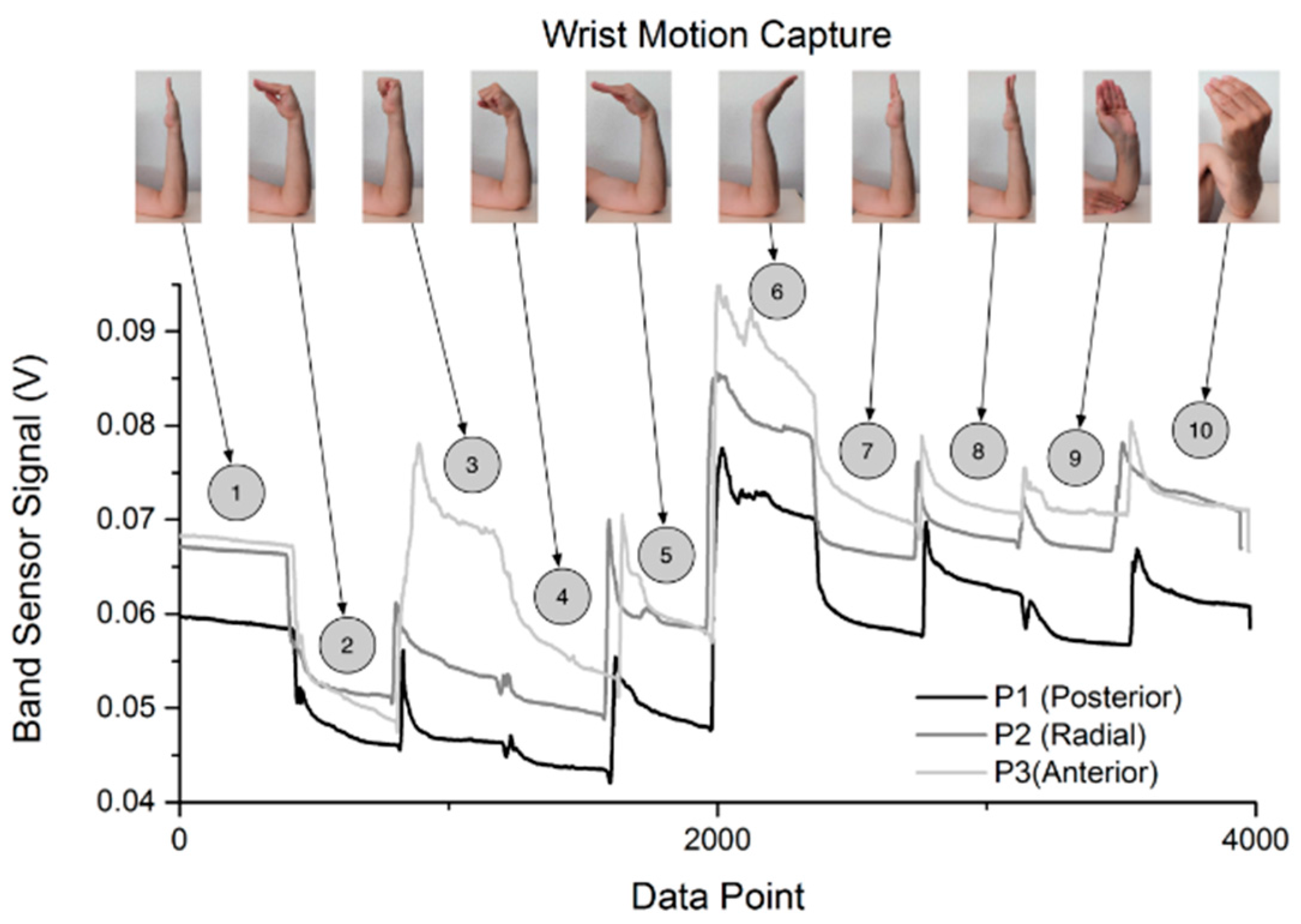
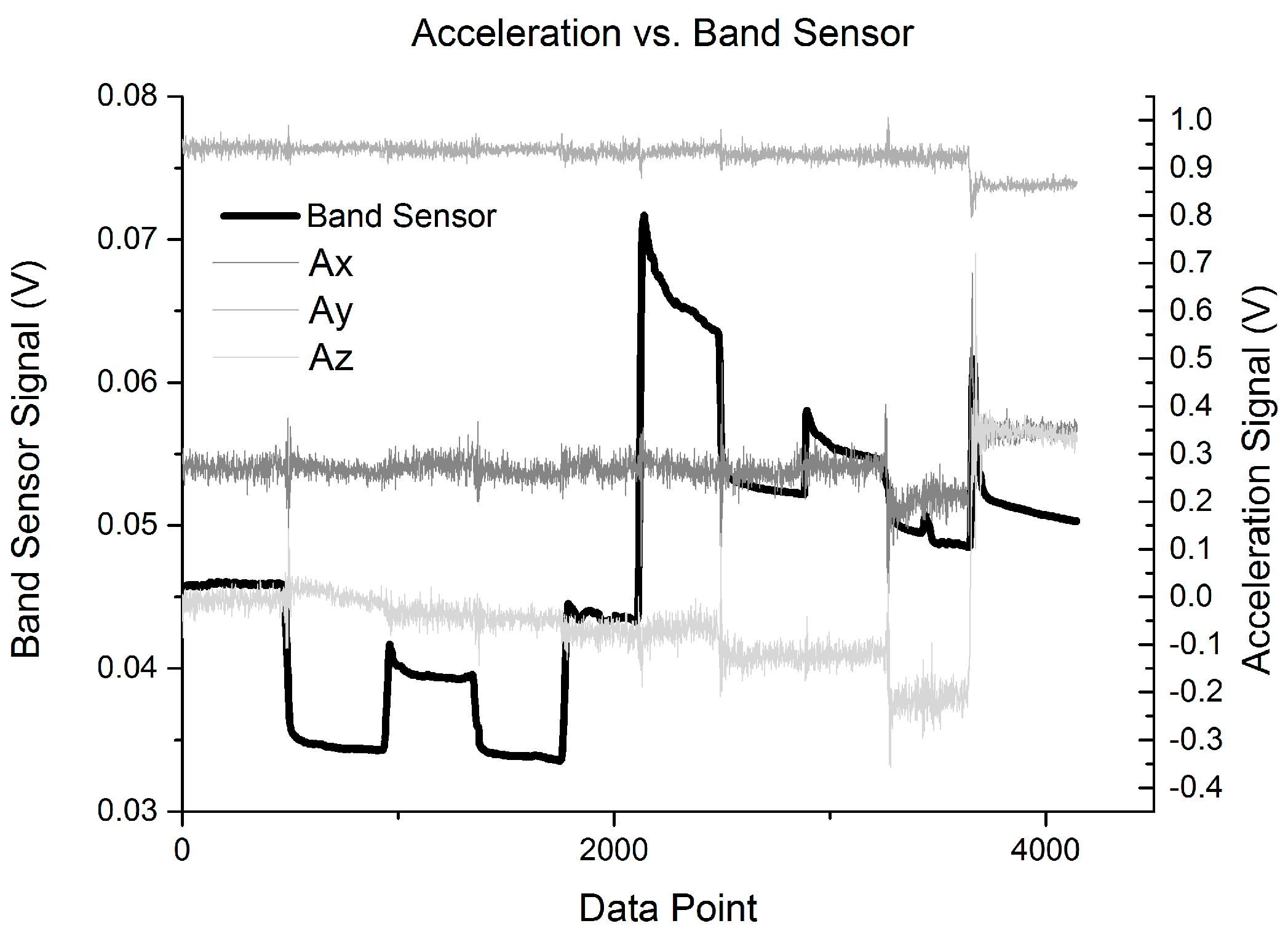
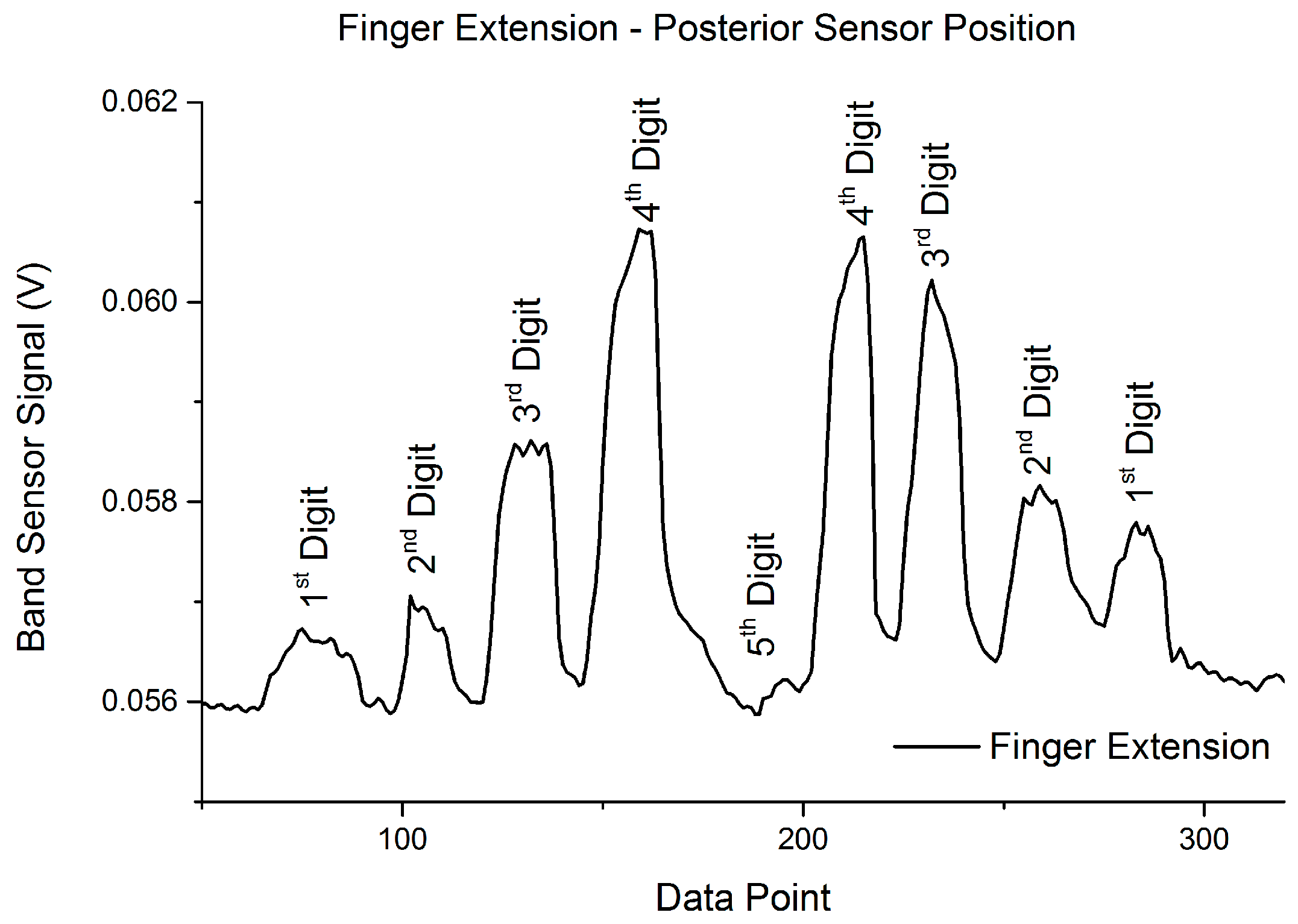
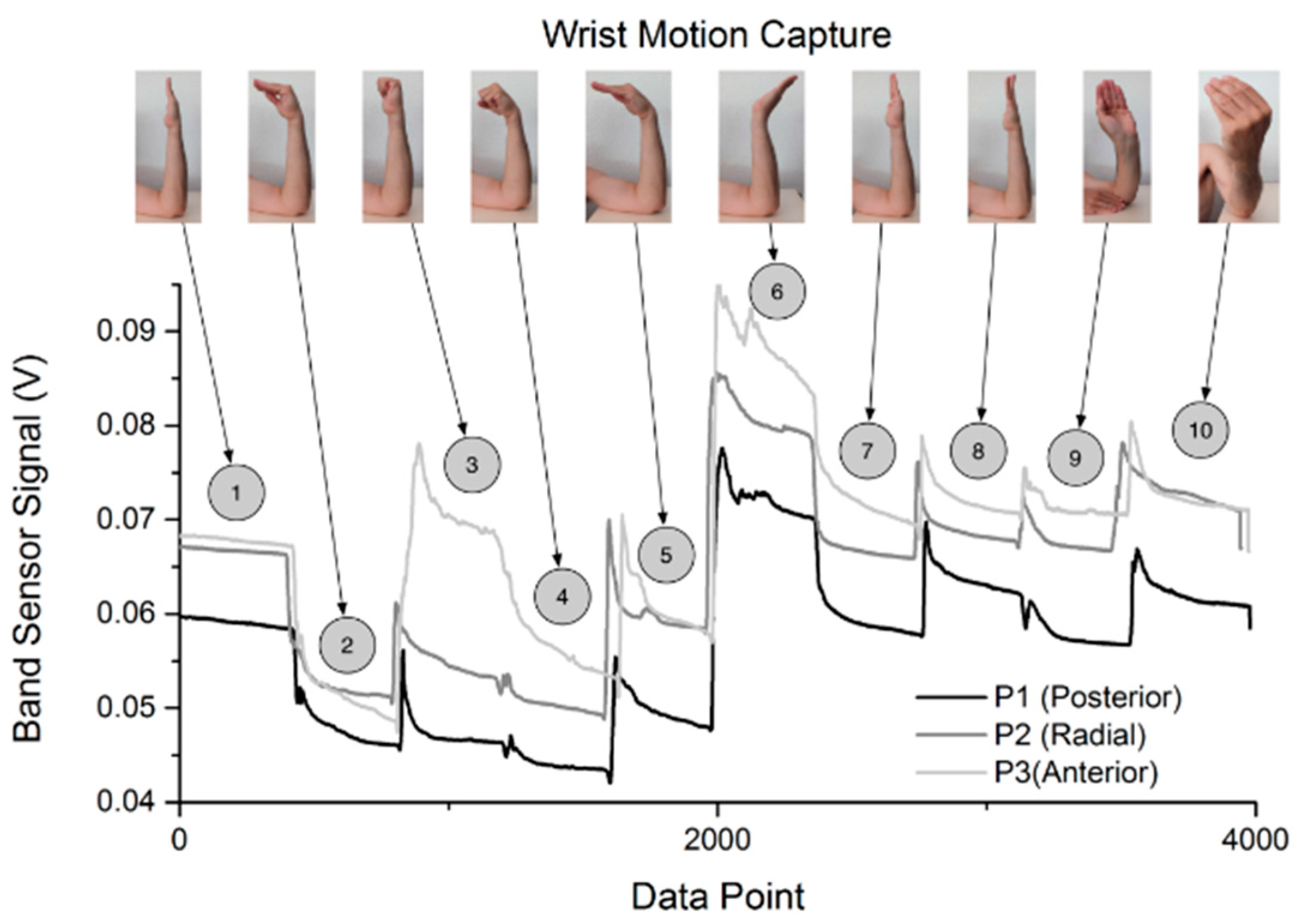
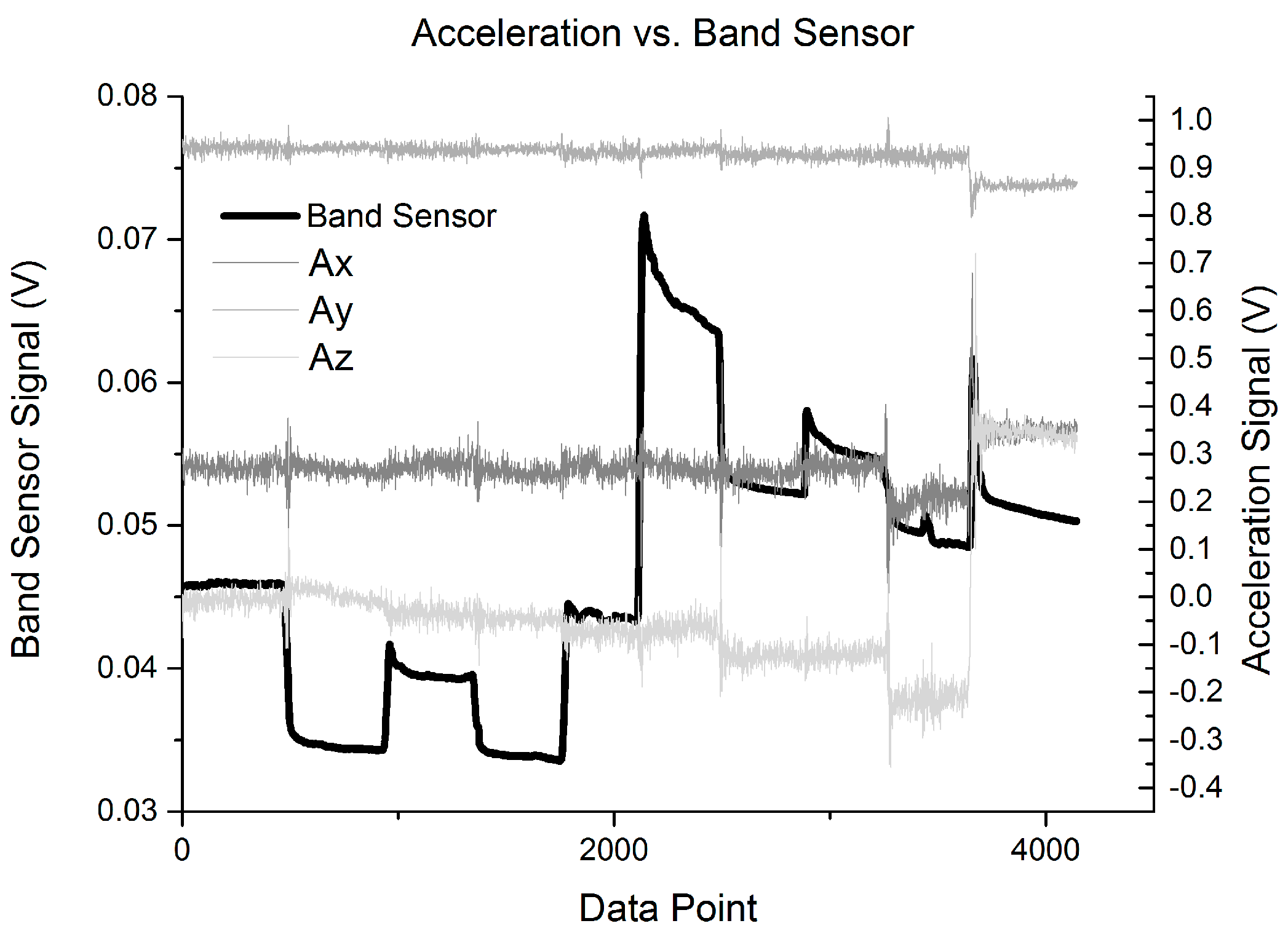
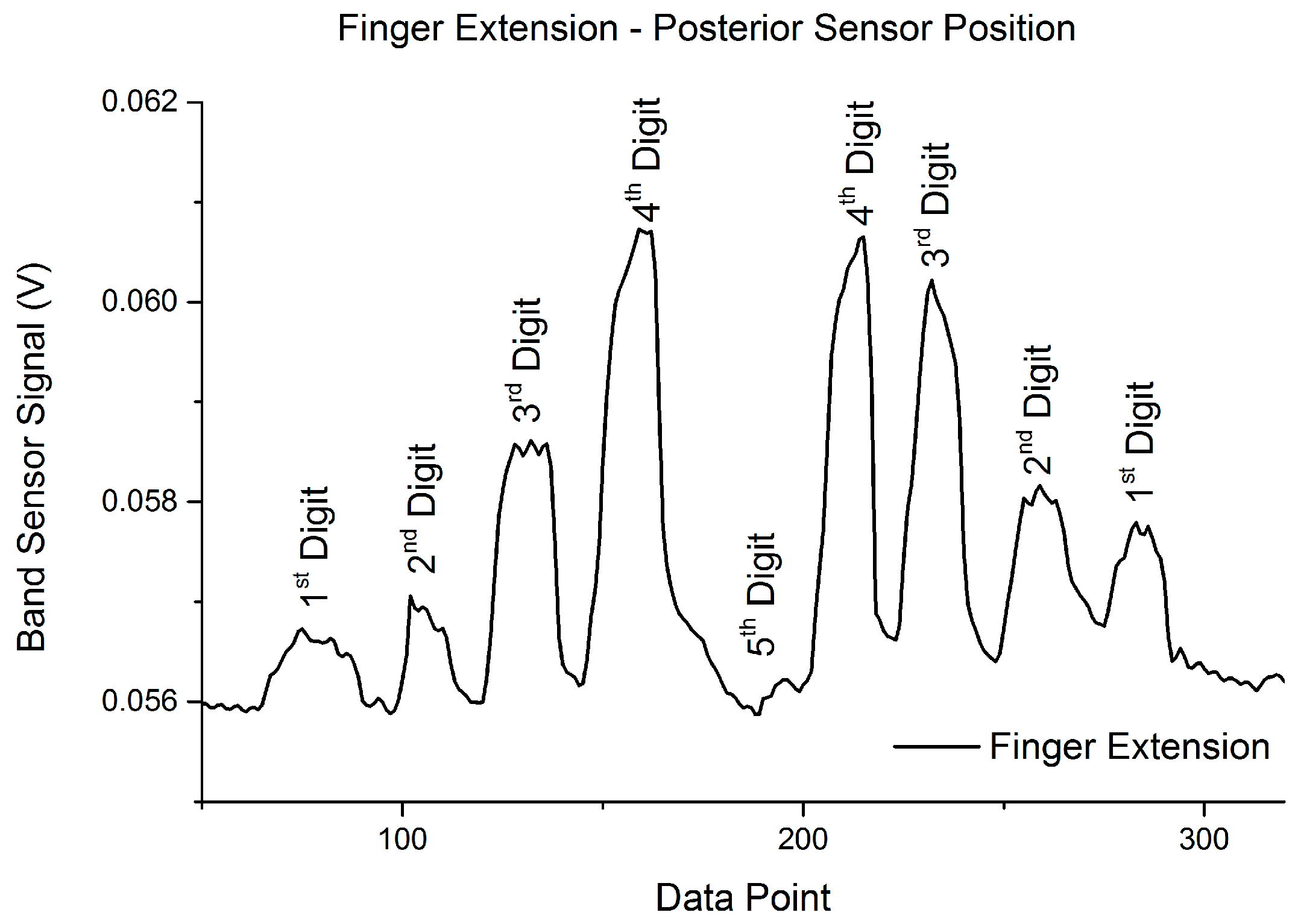
3.2. Band Sensor Motion Capture
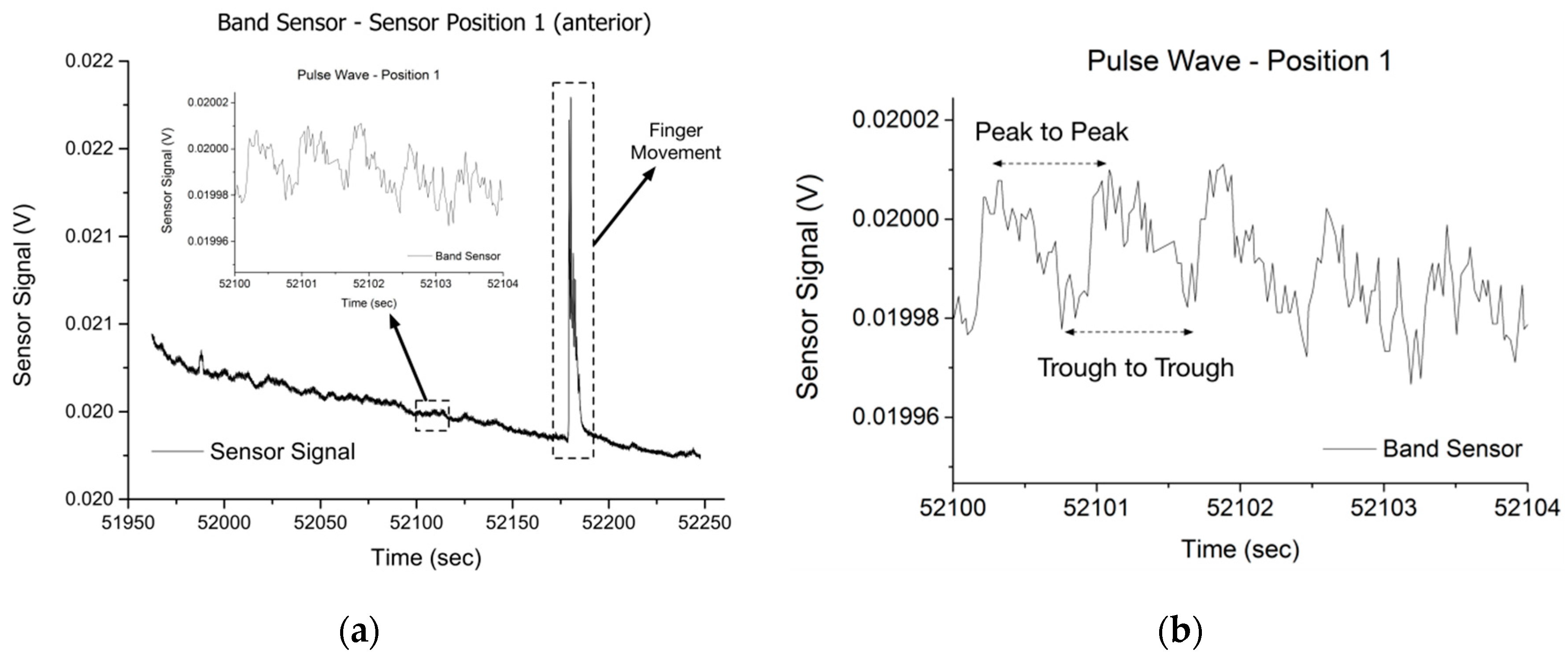
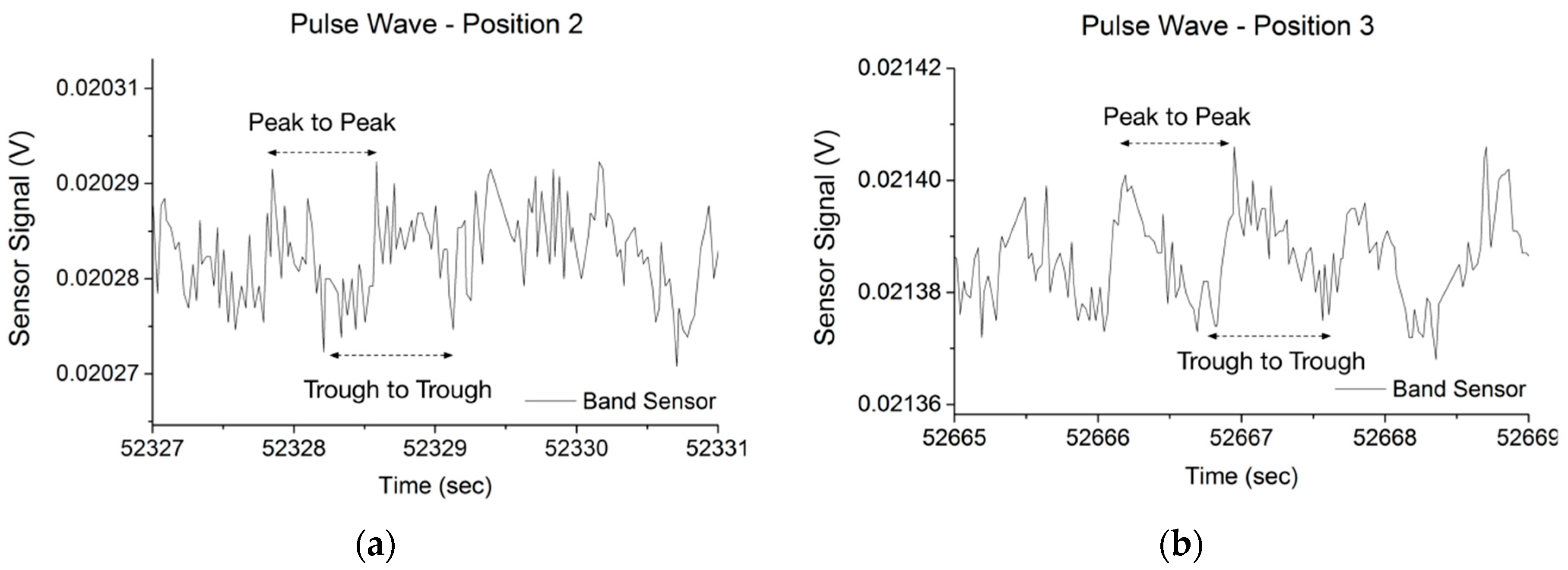
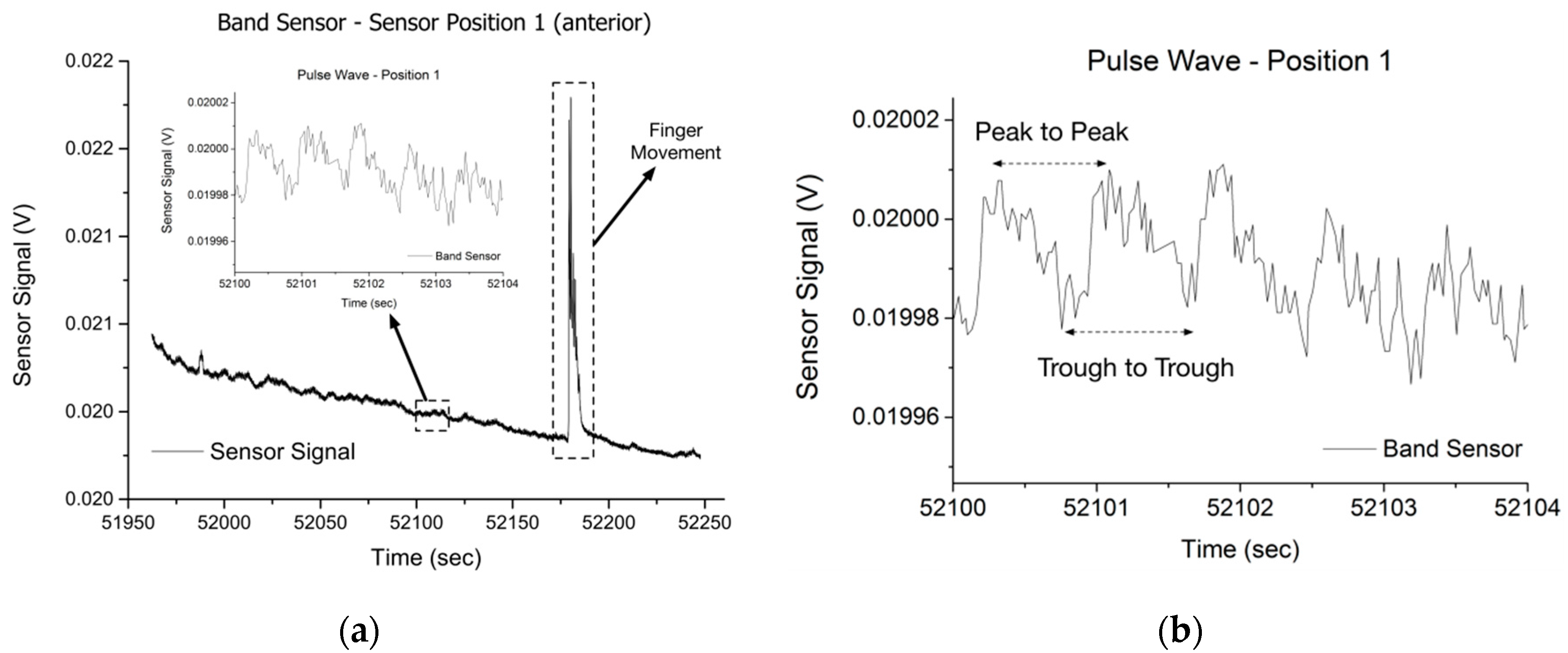
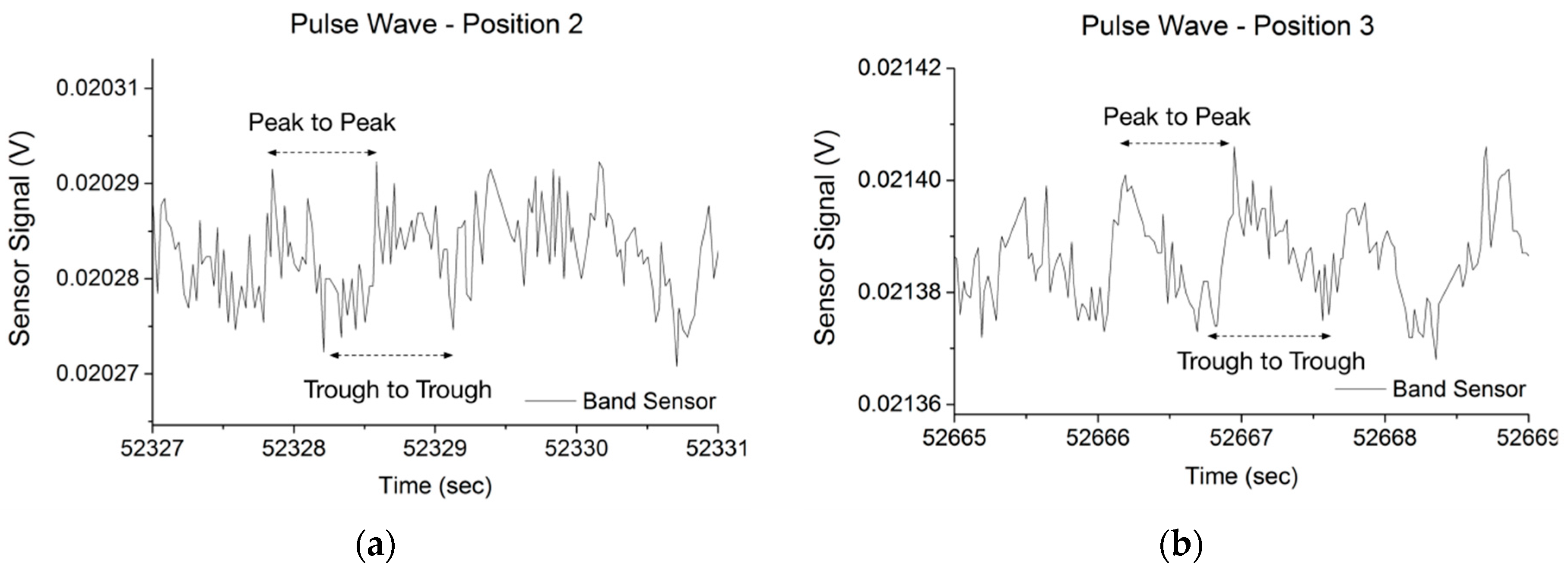
3.3. Pulse Wave Detection
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- De Rossi, D.; Della Santa, A.; Mazzoldi, A. Dressware: Wearable hardware. Mater. Sci. Eng. C 1999, 7, 31–35. [Google Scholar] [CrossRef]
- Melnykowycz, M.; Koll, B.; Scharf, D.; Clemens, F. Comparison of Piezoresistive Monofilament Polymer Sensors. Sensors 2014, 14, 1278–1294. [Google Scholar] [CrossRef] [PubMed]
- Fontaine, A.; Koshi, A.; Morabito, D.; Rodriguez, N. Reflectance-Based Pulse Oximetry for the Chest and Wrist; Worcester Polytechnic Institute: Worcester, MA, USA, 24 April 2013. [Google Scholar]
- Nemoto, T.; Isogai, Z.; Koide, K.; Itoh, Y.; Nogata, F.; Shimamoto, A.; Ju, D.Y.; Matsuura, H. Evaluation of dermal segment on viscoelasticity measurement of skin by rheometer. In Proceedings of the SPIE, Health Monitoring of Structural and Biological Systems, San Diego, CA, USA, 11 April 2007.
- Vexler, A.; Polyansky, I.; Gorodetsky, R. Evaluation of skin viscoelasticity and anisotropy by measurement of speed of shear wave propagation with viscoelasticity skin analyzer. J. Investig. Dermatol. 1999, 113, 732–739. [Google Scholar] [CrossRef] [PubMed]
- Kwon, H.J.; Kwon, Y.H.; Kim, Y.H. Biomechanical skin measurement system for anlaysis viscoelasticity. Key Eng. Mater. 2006, 326, 777–780. [Google Scholar] [CrossRef]
- We, P.; Guo, R.; Zhang, J.; Zhang, Y.T. A new wristband wearable sensor using adaptive reduction filter to reduce motion artifact. In Proceedings of the International Conference on Information Technology and Applications in Biomedicine, Shenzhen, China, 30–31 May 2008; pp. 278–281.
- Teng, X.F.; Zhang, Y.T. The effect of contacting force on photoplethysmographic signals. Phys. Meas. 2004, 25, 1323. [Google Scholar] [CrossRef]
- Teng, X.F.; Zhang, Y.T. The effect of applied sensor contact force on pulse transit time. Phys. Meas. 2006, 27, 675. [Google Scholar] [CrossRef] [PubMed]
- Mi.Mu Gloves Project. Available online: http://dev-blog.mimugloves.com/ (accessed on 30 July 2015).
- Simone, L.K.; Kamper, D.G. Design considerations for a wearable monitor to measure finger posture. J. NeuroEng. Rehabil. 2005, 2. [Google Scholar] [CrossRef] [PubMed]
- Flexpoint Sensor Systems. Bend Sensor Technology Mechanical Application Design Guide; Flexpoint Sensor Systems: Draper, UT, USA, 1997; p. 10. [Google Scholar]
- Matsuzaki, R.; Tabayashi, K. Highly Stretchable, Global, and Distributed Local Strain Sensing Line Using GaInSn Electrodes for Wearable Electronics. Adv. Funct. Mater. 2015, 25, 3806–3813. [Google Scholar] [CrossRef]
- Culha, U.; Nurzaman, S.G.; Clemens, F.; Iida, F. SVAS(3): Strain Vector Aided Sensorization of Soft Structures. Sensors 2014, 14, 12748–12770. [Google Scholar] [CrossRef] [PubMed]
- Mattmann, C.; Clemens, F.; Tröster, G. Sensor for Measuring Strain in Textile. Sensors 2008, 8, 3719–3732. [Google Scholar] [CrossRef]
- Cai, L.; Song, L.; Luan, P.; Zhang, Q.; Zhang, N.; Gao, Q.; Zhao, D.; Zhang, X.; Tu, M.; Yang, F.; et al. Super-stretchable, Transparent Carbon Nanotube-Based Capacitive Strain Sensors for Human Motion Detection. Sci. Rep. 2013, 3, 3048. [Google Scholar] [CrossRef] [PubMed]
- FSR 101—THE BASICS. Available online: http://www.sensitronics.com/fsr101.htm (accessed on 30 July 2015).
- Dementyev, A.; Paradiso, J.A. WristFlex: Low-power gesture input with wrist-worn pressure sensors. In Proceedings of the 27th Annual ACM Symposium on User Interface Software and Technology, New York, NY, USA, 2014; pp. 161–166.
- Teichmann, D.; De Matteis, D.; Walter, M.; Leonhardt, S. A Bendable and Wearable Cardiorespiratory Monitoring Device Fusing Two Noncontact Sensor Principles; In Proceedings of the 2014 11th International Conference on Wearable and Implantable Body Sensor Networks (BSN), Zurich, Swizerland, 16–19 June 2014; pp. 58–63.
- Teichmann, D.; Foussier, J.; Löschcke, D.; Leonhardt, S.; Walter, M. MonitoRing—Magnetic induction measurement at your fingertip. J. Phys. Conf. Ser. 2013, 434. [Google Scholar] [CrossRef]
- Teichmann, D.; Kuhn, A.; Leonhardt, S.; Walter, M. The MAIN Shirt: A Textile-Integrated Magnetic Induction Sensor Array. Sensors 2014, 14, 1039–1056. [Google Scholar] [CrossRef] [PubMed]
- Teichmann, D.; Kuhn, A.; Leonhardt, S.; Walter, M. Human motion classification based on a textile integrated and wearable sensor array. Clin. Phys. Physiol. Meas. 2013, 34, 963. [Google Scholar] [CrossRef] [PubMed]
- Huang, C.-T.; Shen, C.-L.; Tang, C.-F.; Chang, S.-H. A wearable yarn-based piezo-resistive sensor. Sens. Actuators A Phys. 2008, 141, 396–403. [Google Scholar] [CrossRef]
- Huang, C.-T.; Tang, C.-F.; Lee, M.-C.; Chang, S.-H. Parametric design of yarn-based piezoresistive sensors for smart textiles. Sens. Actuators A Phys. 2008, 148, 10–15. [Google Scholar] [CrossRef]
- Zhao, H.; Zhang, Y.; Bradford, P.D.; Zhou, Q.; Jia, Q.; Yuan, F.-G.; Zhu, Y. Carbon nanotube yarn strain sensors. Nanotechnology 2010, 21, 305502. [Google Scholar] [CrossRef] [PubMed]
- Gibbs, P.; Asada, H.H. Wearable Conductive Fiber Sensors for Multi-Axis Human Joint Angle Measurements. J. NeuroEng. Rehabil. 2005, 2, 7. [Google Scholar] [CrossRef] [PubMed]
- Martinez, F.; Obieta, G.; Uribe, I.; Sikora, T.; Ochoteco, E. Polymer-Based Flexible Strain Sensor. Procedia Chem. 2009, 1, 915–918. [Google Scholar] [CrossRef]
- Cochrane, C.; Koncar, V.; Lewandowski, M.; Dufour, C. Design and Development of a Flexible Strain Sensor for Textile Structures Based on a Conductive Polymer Composite. Sensors 2007, 7, 473–492. [Google Scholar] [CrossRef]
- Shui, X.; Chung, D.D.L. A piezoresistive carbon filament polymer-matrix composite strain sensor. Smart Mater. Struct. 1996, 5, 243. [Google Scholar] [CrossRef]
- Lee, J.; Kwon, H.; Seo, J.; Shin, S.; Koo, J.H.; Pang, C.; Son, S.; Kim, J.H.; Jang, Y.H.; Kim, D.E.; et al. Sensors: Conductive Fiber-Based Ultrasensitive Textile Pressure Sensor for Wearable Electronics. Adv. Mater. 2015, 27, 2409. [Google Scholar] [CrossRef]
- Google Project Jacquard. Available online: https://www.google.com/atap/project-jacquard/ (accessed on 30 July 2015).
- Flandin, L.; Chang, A.; Nazarenko, S.; Hiltner, A.; Baer, E. Effect of strain on the properties of an ethylene-octene elastomer with conductive carbon fillers. J. Appl. Polym. Sci. 2000, 76, 894–905. [Google Scholar] [CrossRef]
- Lee, J.; Kim, S.; Lee, J.; Yang, D.; Park, B.C.; Ryu, S.; Park, I. A stretchable strain sensor based on a metal nanoparticle thin film for human motion detection. Nanoscale 2014, 6, 11932–11939. [Google Scholar] [CrossRef] [PubMed]
- Yan, C.; Wang, J.; Kang, W.; Cui, M.; Wang, X.; Foo, C.Y.; Chee, K.J.; Lee, P.S. Highly Stretchable Piezoresistive Graphene-Nanocellulose Nanopaper for Strain Sensors. Adv. Mater. 2014, 26, 2022–2027. [Google Scholar] [CrossRef] [PubMed]
- Boland, C.S.; Khan, U.; Backes, C.; O’Neill, A.; McCauley, J.; Duane, S.; Shanker, R.; Liu, Y.; Jurewicz, I.; Dalton, A.B.; et al. Sensitive, High-Strain, High-Rate Bodily Motion Sensors Based on Graphene–Rubber Composites. ACS Nano 2014, 8, 8819–8830. [Google Scholar] [CrossRef] [PubMed]
- Clemens, F.J.; Koll, B.; Graule, T.; Watras, T.; Binkowski, M.; Mattmann, C.; Silveira, I. Development of Piezoresistive Fiber Sensors, Based on Carbon Black Filled Thermoplastic Elastomer Compounds, for Textile Application. Adv. Sci. Technol. 2013, 80, 7–13. [Google Scholar] [CrossRef]
- Ronan O’Rahilly, F.M. Stanley Carpenter, Basic Human Anatomy; Dartmouth Medical School and Dartmouth College: Hanover, NH, USA, 2008. [Google Scholar]
- Gestureworks Core. Available online: http://gestureworks.com/ (accessed on 19 January 2016).
- GestrueML—Sensor Gesture Index. Available online: http://www.gestureml.org/doku.php/gestures/sensor/gesture_index (accessed on 19 January 2016).
- Chipworks Apple A1554 Smart Watch Basic Product Teardown Report. Available onlne: http://www.chipworks.com/competitive-technical-intelligence/overview/technology-reports/recent-reports/download-the-apple (accessed on 28 January 2016).
- HBM Hottinger Baldwin Messtechnik GmbH (HBM). Available online: http://www.hbm.com/ (accessed on 28 July 2015).
- Costa, P.; Silvia, C.; Viana, J.C.; Lanceros Mendez, S. Extruded thermoplastic elastomers styrene-butadiene-styrene/carbon nanotubes composites for strain sensor applications. Compos. Part B Eng. 2014, 57, 242–249. [Google Scholar] [CrossRef]
- Silver, F.H.; Freeman, J.W.; Devore, D. Viscoelastic properties of human skin and processed dermis. Skin Res. Technol. 2001, 7, 18–23. [Google Scholar] [CrossRef] [PubMed]
- Nelson, M.R.; Stepanek, J.; Cevette, M.; Covalciuc, M.; Hurst, R.T.; Tajik, A.J. Noninvasive Measurement of Central Vascular Pressures With Arterial Tonometry: Clinical Revival of the Pulse Pressure Waveform? Mayo Clin. Proc. 2010, 85, 460–472. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Strain Test 1 | 10%–5.0% | 20%–15% | 30%–25% | 40%–35% | 50%–45% | 35%–15% |
|---|---|---|---|---|---|---|
| Hold Time | 60 s | 60 s | 60 s | 60 s | 60 s | 60 s |
| Strain Test 2 | 50%–45% | 30%–25% | ||||
| Hold Time | 300 s | 300 s |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|
 |  |  |  |  |  |  |  |  |  |
| Hand Position | Description |
|---|---|
| 1 | Neutral, finger adduction |
| 2 | Finger flexion |
| 3 | Palmar flexion (~30°) and finger flexion (~30°) |
| 4 | Palmar flexion (~30°) and full finger flexion |
| 5 | Palmar flexion (~30°) and finger flexion (~45°) |
| 6 | Hand extension |
| 7 | Neutral, finger adduction |
| 8 | Finger abduction |
| 9 | Hand pronation, finger adduction, 1st and 5th digit opposition |
| 10 | Hand supination, finger adduction, 1st and 5th digit opposition |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Melnykowycz, M.; Tschudin, M.; Clemens, F. Piezoresistive Soft Condensed Matter Sensor for Body-Mounted Vital Function Applications. Sensors 2016, 16, 326. https://doi.org/10.3390/s16030326
Melnykowycz M, Tschudin M, Clemens F. Piezoresistive Soft Condensed Matter Sensor for Body-Mounted Vital Function Applications. Sensors. 2016; 16(3):326. https://doi.org/10.3390/s16030326
Chicago/Turabian StyleMelnykowycz, Mark, Michael Tschudin, and Frank Clemens. 2016. "Piezoresistive Soft Condensed Matter Sensor for Body-Mounted Vital Function Applications" Sensors 16, no. 3: 326. https://doi.org/10.3390/s16030326
APA StyleMelnykowycz, M., Tschudin, M., & Clemens, F. (2016). Piezoresistive Soft Condensed Matter Sensor for Body-Mounted Vital Function Applications. Sensors, 16(3), 326. https://doi.org/10.3390/s16030326