
3D Buried Utility Location Using A Marching-Cross-Section Algorithm for Multi-Sensor Data Fusion


 , , ,
, , , 
Abstract
:1. Introduction
2. Sensor Data Interpretation and Registration
2.1. Sensors and Sensor Data Interpretation
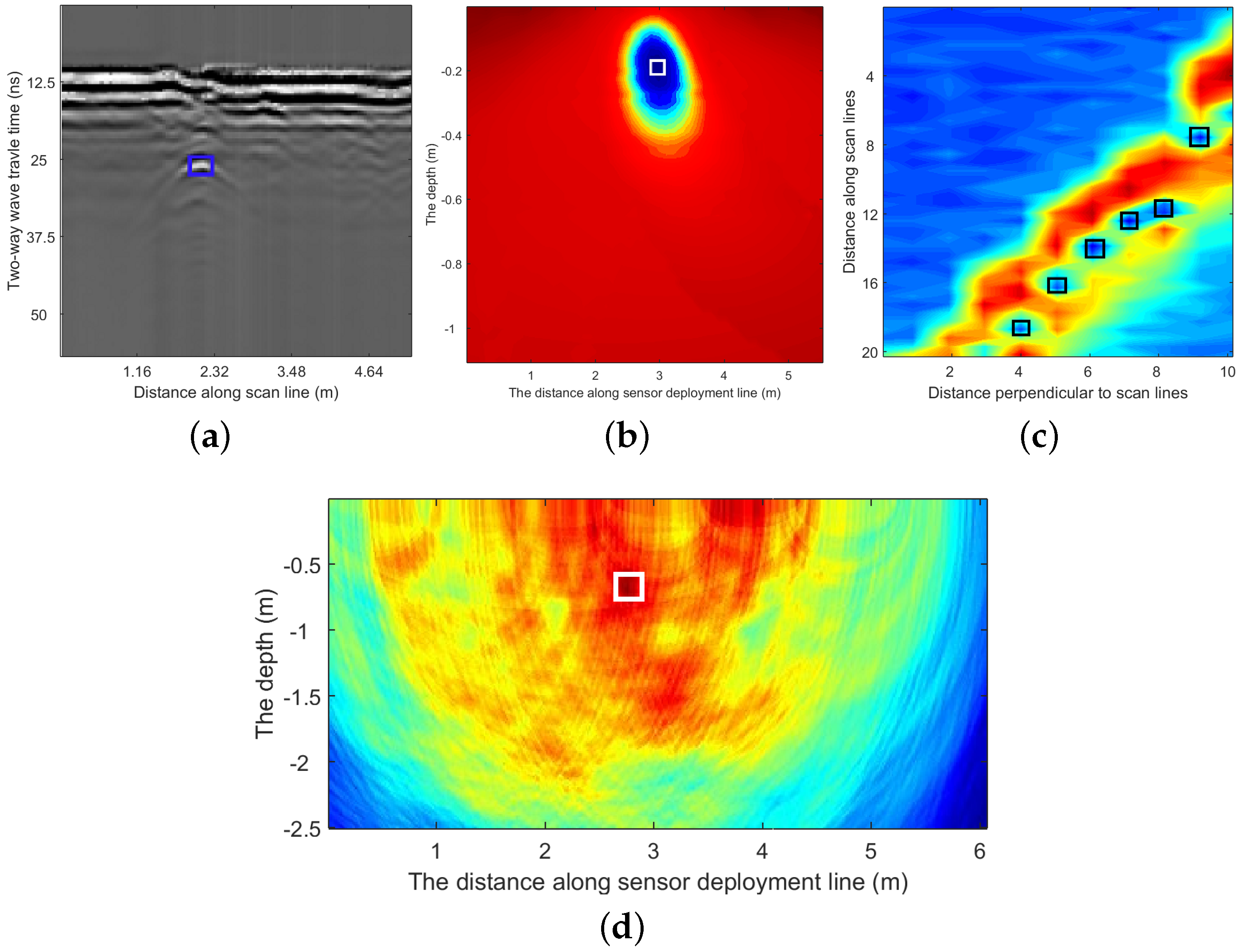
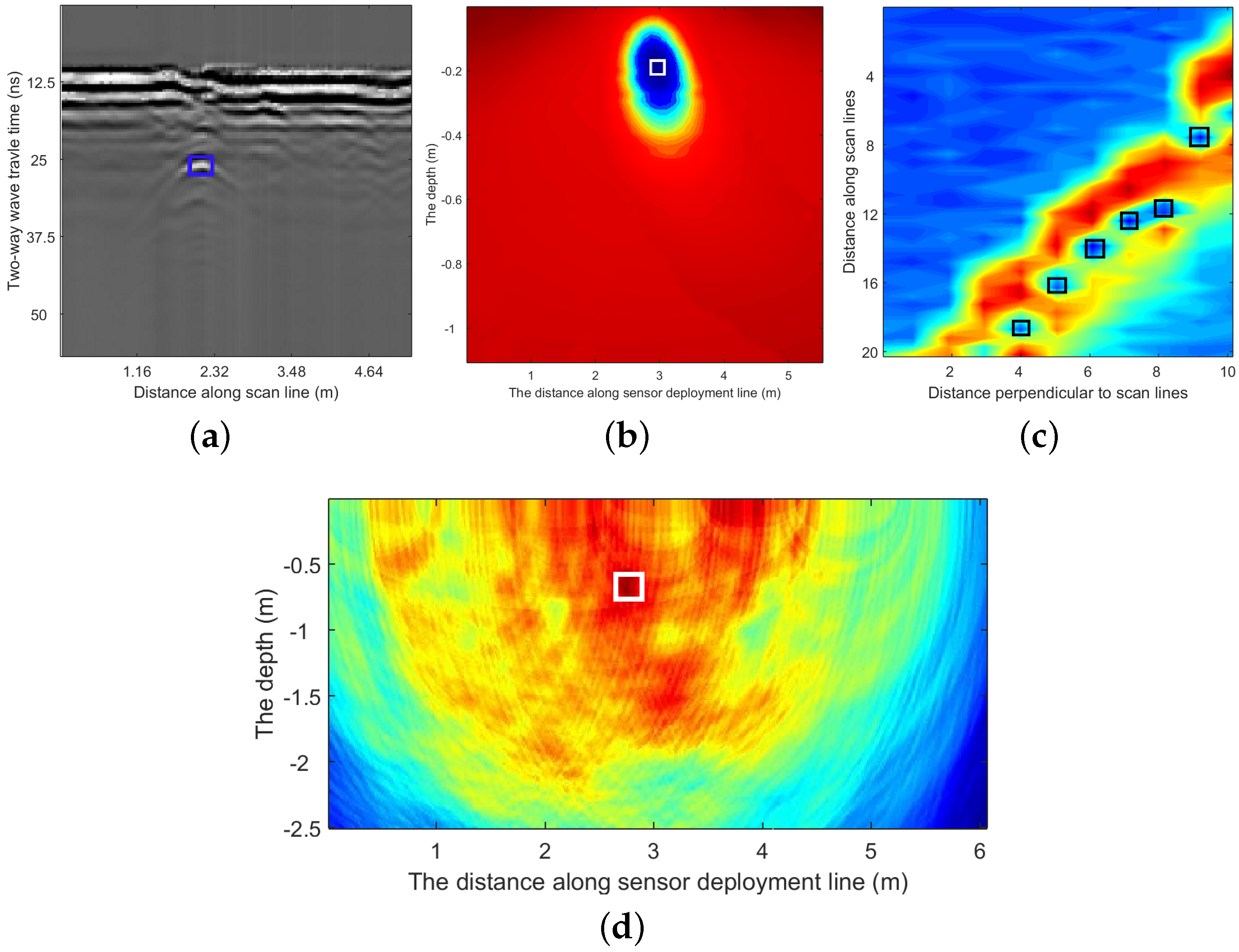
- GPR is one of the most used techniques to locate both metallic and non-metallic buried utilities. It is an active instrument that transmits electromagnetic waves into the ground and collects the reflected signals from subsurface structures. By pushing a GPR sensor along a scan line, a GPR image is captured, as seen in Figure 1a. The vector of reflections measured at one certain position for different answering times (travel time) is called an A-scan. A sequence of consecutive A-scans composes a B-scan, which can be considered as a matrix of reflection intensities with rows corresponding to the answering time and columns corresponding to horizontal positions on the scan line. GPR data can be processed and interpreted manually by experts or using (semi-) automatic algorithms to find buried utilities represented by hyperbolic signatures in the GPR images [8,20,23,24]. In this paper, the hypothesized detections from GPR images are annotated manually; an example is shown in Figure 1a.
- PMF utilizes the oscillating magnetic field created by the flow of current within a buried cable to locate it [25]. As the current flow within a power cable can also induce currents within neighbouring utility pipelines or ducts made from conducting materials, PMF is also capable of detecting the magnetic fields indirectly generated from the nearby metallic objects. However, as a passive sensor, it can only detect the utilities with a flow of current; non-conductive materials, such as plastic pipes, cannot be detected by this technique. The PMF sensor used in this work is made of an array of 27 coils mounted on a frame to measure the magnetic field above buried cables. The hypothesized locations of buried cables are estimated by minimizing the error between the measured magnetic field values and those predicted by a simple numerical model of one or more cables [21,25,26]. The results are presented as an error map (an example is shown in Figure 1b); the lowest error is related to the most likely location for the cable.
- The MG sensor used in this work is composed of four coils evenly spaced vertically on a plastic pole. By analysing the changes of the signals produced by moving the coils, the position of the buried cable can be estimated [27,28]. Concretely, the differences of the magnitude values of the captured magnetic fields by different coils are calculated, and the local valleys of the differences along the survey line are automatically selected, which are considered as hypothesized detections from this technique. An example is shown in Figure 1c.
- LFEM is a method of measuring anomalies in the electrical resistivity of the ground using non-contact methods. In this work, a sinusoidal alternating current is injected into the ground, and the sensed voltage is measured on two capacitively coupled plates moved along the surface. The ratio of voltage to current is proportional to the apparent resistivity of the ground. Any materials that present a contrast in electrical properties to the soil have the potential to be detected by this technique. The measurements are repeated on a regular grid, and the resulting image can reveal the underground infrastructure [7].
- VA-based techniques mechanically excite one part of the buried utility (via a manhole or valve) or the ground in a controlled way and measure the received response(s) at some remote location(s) on the ground surface using an array of geophones. By analysing the nature of the measured response(s) at the surface, the location of the buried pipe(s) can then be inferred [4]. These techniques are capable of detecting different types of pipes, and they work well in both dry and saturated areas, although it may not be suitable for detecting cables. In this work, the ground surface is excited, and the subsequent reflections arriving at multiple geophones are analysed to estimate the possible locations of buried pipes. The cross-correlation functions between the measured ground velocities and a reference measurement adjacent to the excitation are used to generate a cross-sectional image of the ground using a time domain stacking approach; then, local maxima are extracted from this image and used as the hypothesized detections [4,5,22]. An example of a cross-sectional stacking image is given in Figure 1d, in which the dark red region identifies the most possible locations of the pipe.
2.2. Data Registration
3. Buried Utility Location with an MCS Algorithm
3.1. Assumptions
3.1.1. Representation of Hypothesized Detections
3.1.2. The Uncertainty of Hypothesized Detection
3.2. Initialization of Utility Tracks
- Within each maximum combination, in order to take the uncertainties of hypothesized detection into account, the Mahalanobis distances (, and ) between each pair of hypothesized detections in this combination are computed with the prior uncertainties of hypothesized detections defined in Equation (1) to Equation (3). Then,
- if none of the Mahalanobis distances are less than a predefined threshold, this means no pair of the hypothesized detections is believed to come from the same utility. If so, no fusion will be done in this maximum combination;
- if there are some Mahalanobis distances less than the threshold, the agglomerative clustering method [29] is employed to merge associated hypothesized detections using the Mahalanobis distance metric. The pair of hypothesized detections () with the minimum Mahalanobis distance value are merged using a maximum likelihood formulation. The merged hypothesized detection and its uncertainty are calculated as follows:
- The merged hypothesized detection and the rest of the hypothesized detections in the original combination form a new combination . The Mahalanobis distances with respect to this new combination are computed and compared to the threshold. If the minimum Mahalanobis distance is less than the threshold, a further fusion will be done on the related pair and a new combination generated. This procedure continues until no Mahalanobis distance is less than the threshold. At this stage, the fusion results and the hypothesized detection used to do the fusions are recorded.
- After going through all of the maximum combinations with the above procedure, two types of merged results will be specially treated:
- some fusions can be repeated multiple times. For example, if a fusion with two hypothesized detections and is recorded with respect to a maximum combination, it may be met again in a later maximum combination. Therefore, once a fusion is recorded, the repeated ones will not be recorded any more.
- Some fusions may be expanded from a recorded fusion. For example, a fusion is based on hypothesized detections and is recorded in the list, and later, a fusion based on is found. In this situation, the latter one is regarded as an expansion from the previous one, and the one with fewer hypothesized detections is removed.
- Finally, each recorded result of fusion is regarded as a utility and used to initialize a utility track. If a hypothesized detection is never used to initialize any utility track with others, it will initialize a track by itself.
3.3. Marching of Utility Tracks
3.4. Data Association
3.5. Updating of Utility Tracks
- measurement residual:
- residual covariance:
- Kalman gain:
- updated utility state:
- update utility uncertainty:
3.6. Management of the Utility Tracks
- split: if a predicted utility track can be associated with different groups of hypothesized detections, it is split into multiple tracks and updated with the corresponding hypothesized detection combinations, respectively;
- merge: if two utility tracks are updated with exactly the same hypothesized detections in M consecutive scss, they are merged as a single track. We tried a range of values of M from one to five in this work; the best result was obtained when M was set to three.
- prune: if a buried utility is detected on a scs and it extends forward to the following scss, the probability of this utility not being detected on several consecutive scss should be very low. Therefore, a variable is defined to record the accumulated non-updated utility distance among consecutive scss for a certain track. If the predicted state of the track on the k-th scan cross-section is not updated by any sensor hypothesized detection, the distance between the predicted location and the previous location is added onto . When this accumulated distance exceeds a certain threshold (e.g., two metres), this utility track will be stopped. If any sensor hypothesized detection is associated with the track before reaching the threshold, will be reset to zero.
- new utility initialization: the hypothesized detections on not associated with any predicted track are used to initialize new tracks in the same way as described in the initialization step (Section 3.2).
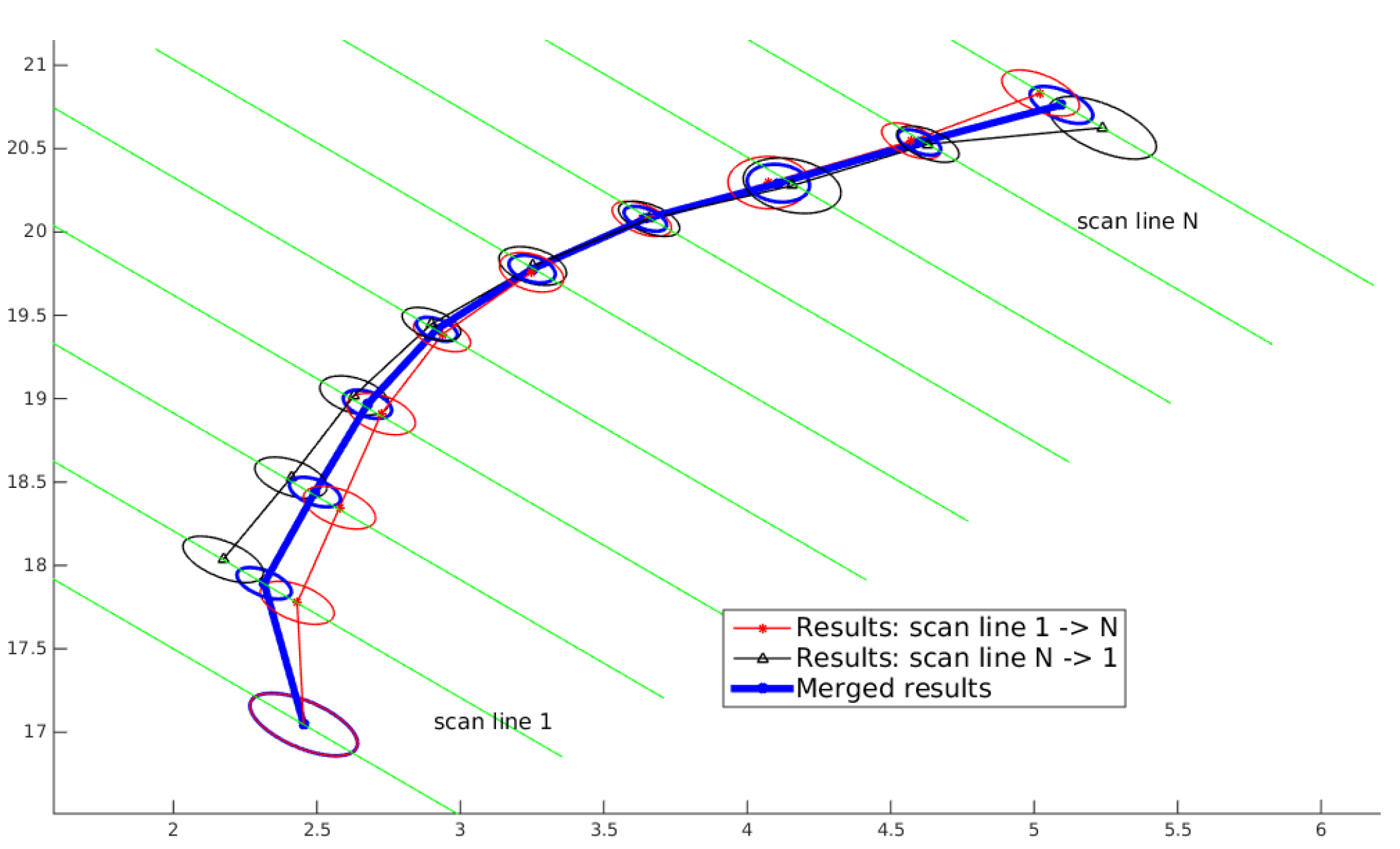
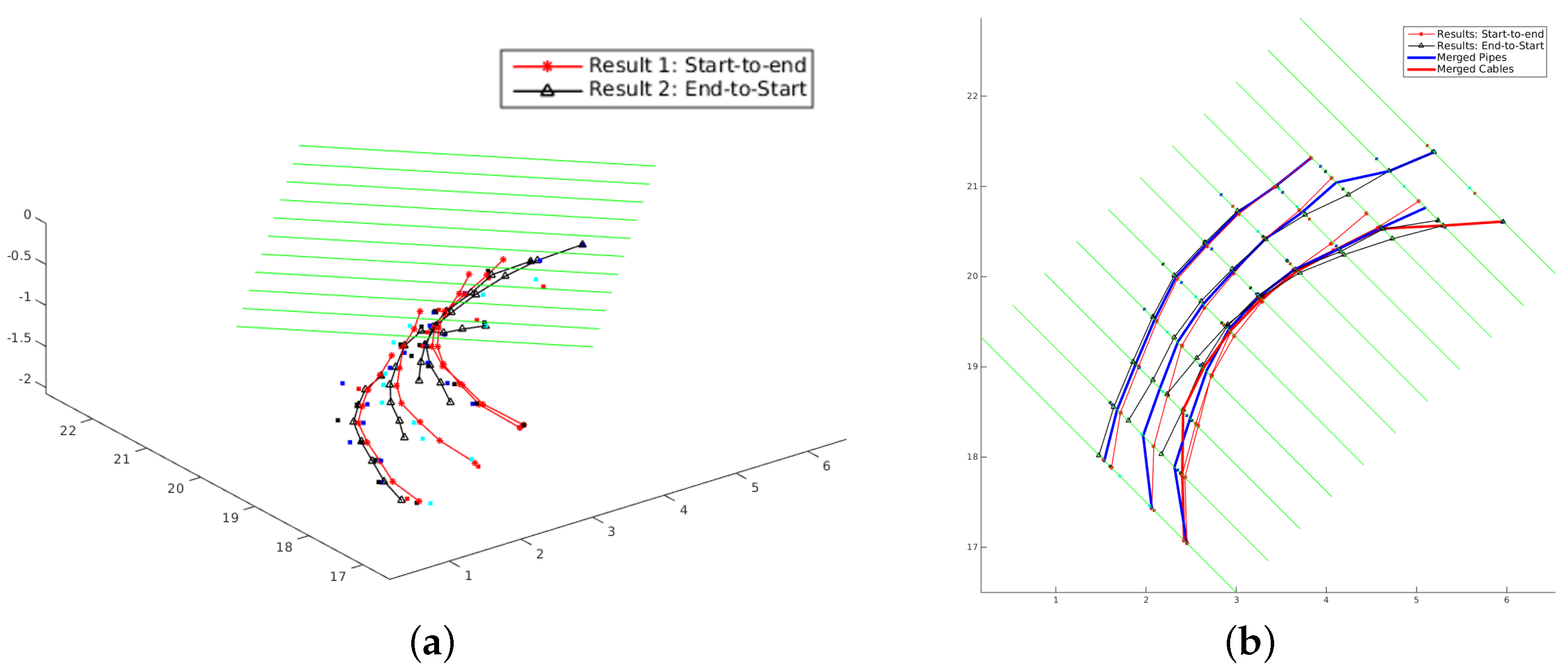
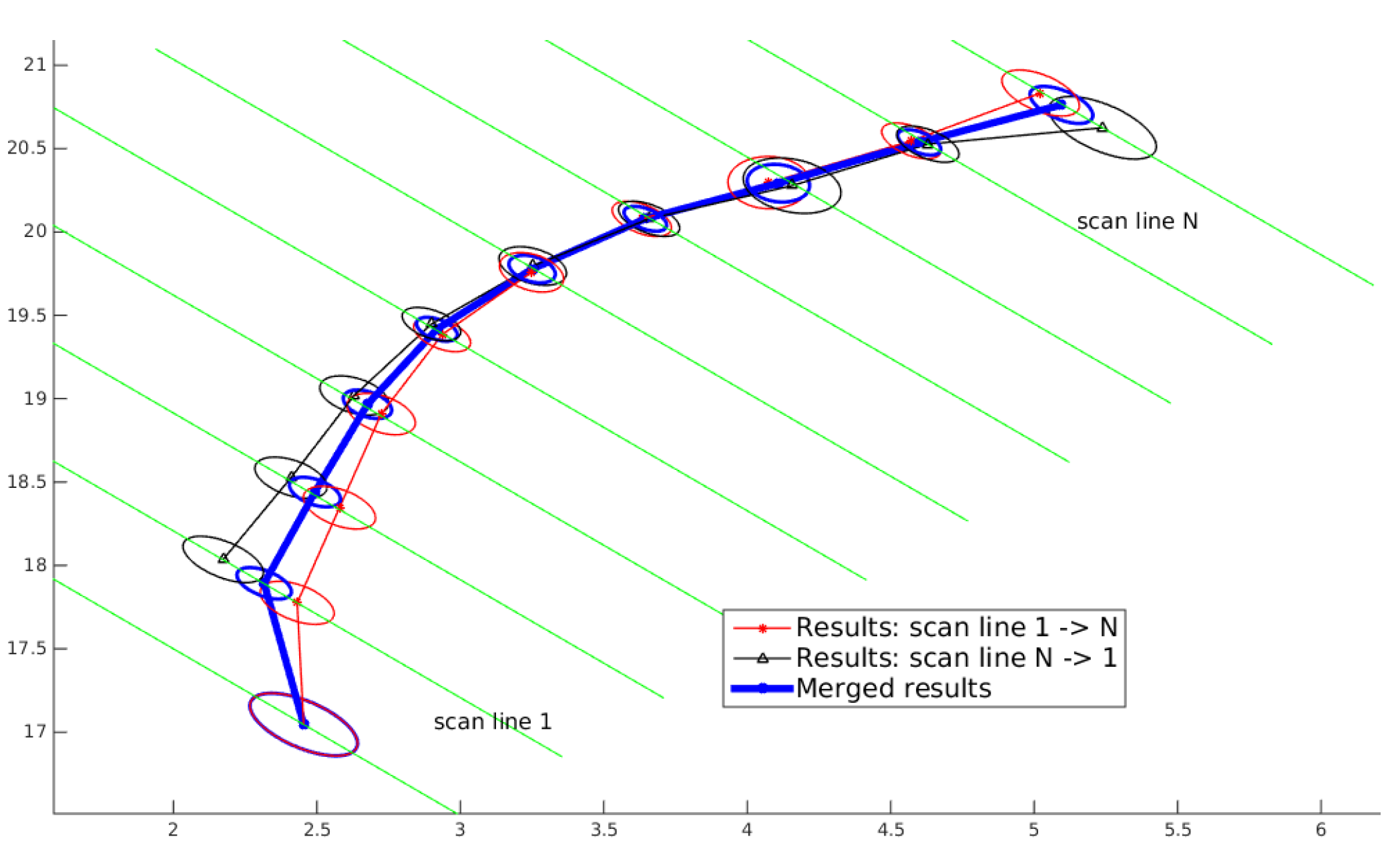
Merging Utility Tracks Detected in Both Marching Directions
4. MCS Algorithm with Virtual Scan Lines
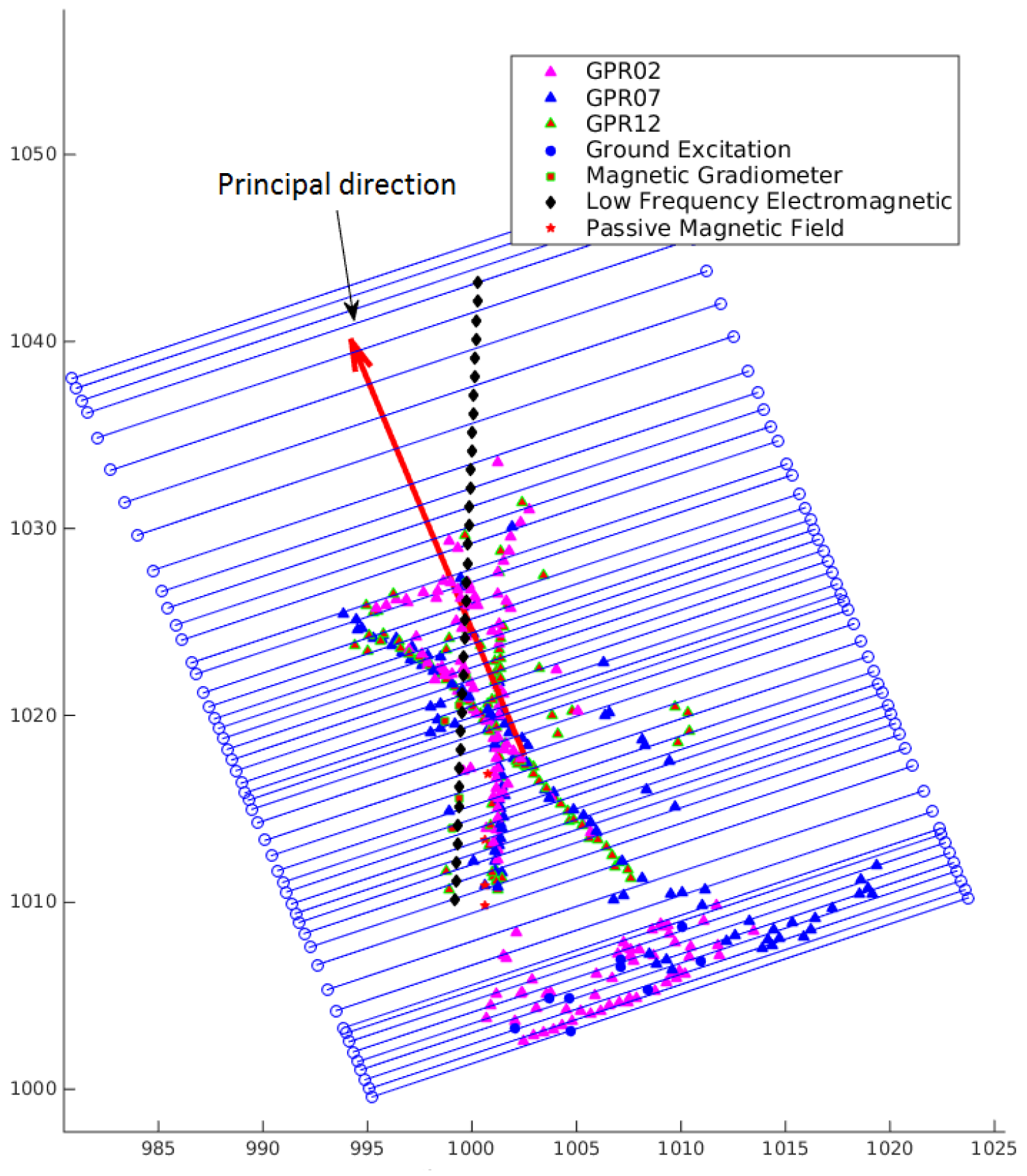
4.1. Orientation of the Virtual Scan Lines
4.2. Adaptive Selection of Distance between Virtual Scan Lines
- (a)
- if no utility track has been initialized prior to this scs, the associated hypothesized detections are projected onto the scs along the direction perpendicular to the scs. Then, the same initialization procedure is performed as described in Section 3.2;
- (b)
- if some tracks have been initialized and predicted onto the current scs, the directions of the predicted tracks are used to project the hypothesized detections related to this scs: for each track, these hypothesized detections are projected along the predicted direction of the track, then the data association algorithm presented in Section 3.4 is applied to find the corresponding projected hypothesized detections of this utility track. This procedure is repeated for all of the predicted tracks;
- (c)
- the hypothesized detections, which are not used to update any existing track, are projected along the direction perpendicular to the scs onto the related virtual scs and used to initialize new tracks.
5. Experimental Results
5.1. Synthetic Data
5.2. Real Data
5.2.1. Survey Site
5.2.2. Ground Truth
5.2.3. Experiment I: MCS Algorithm Applied on Three Groups of GPR Data Sharing Common Scan Lines
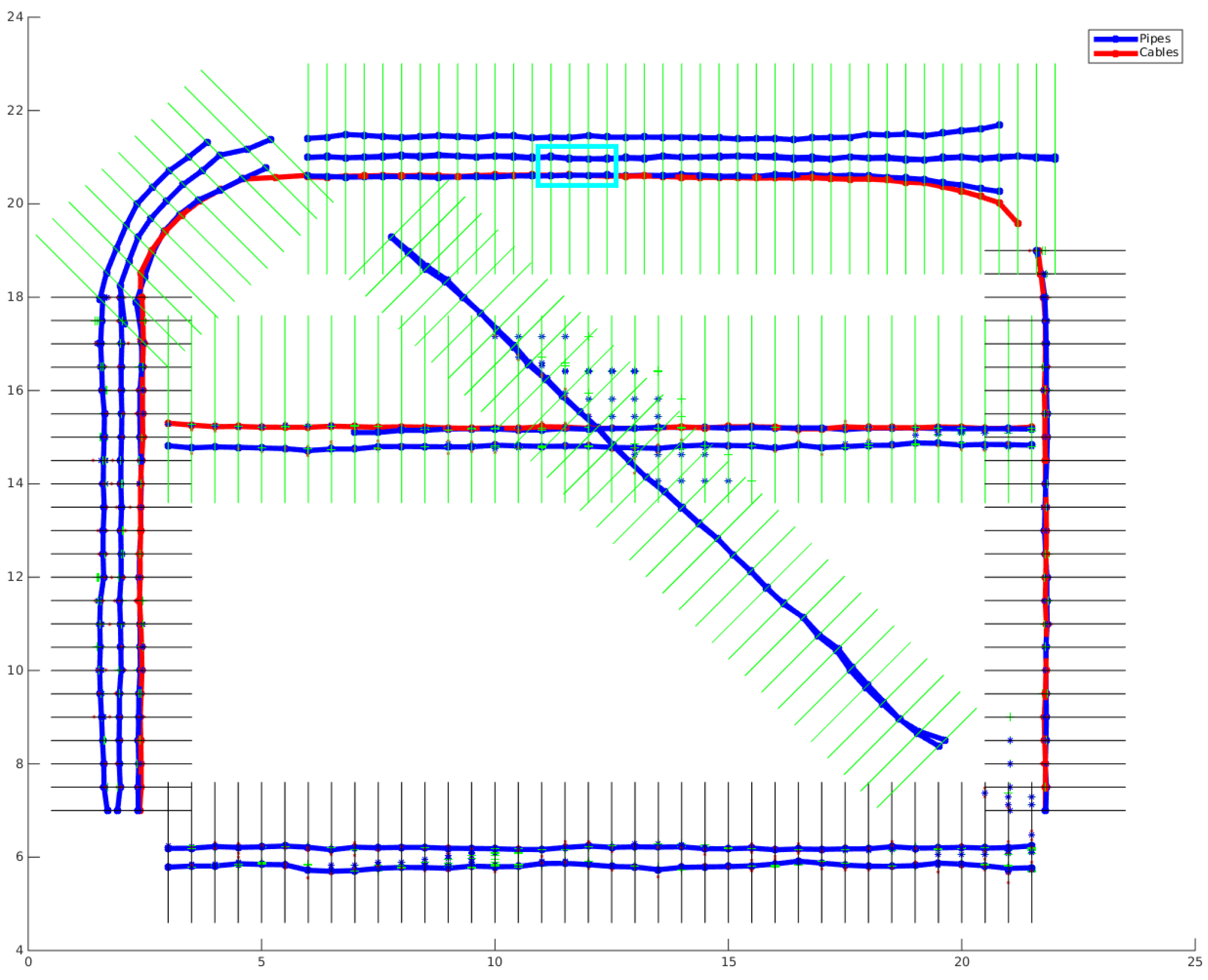
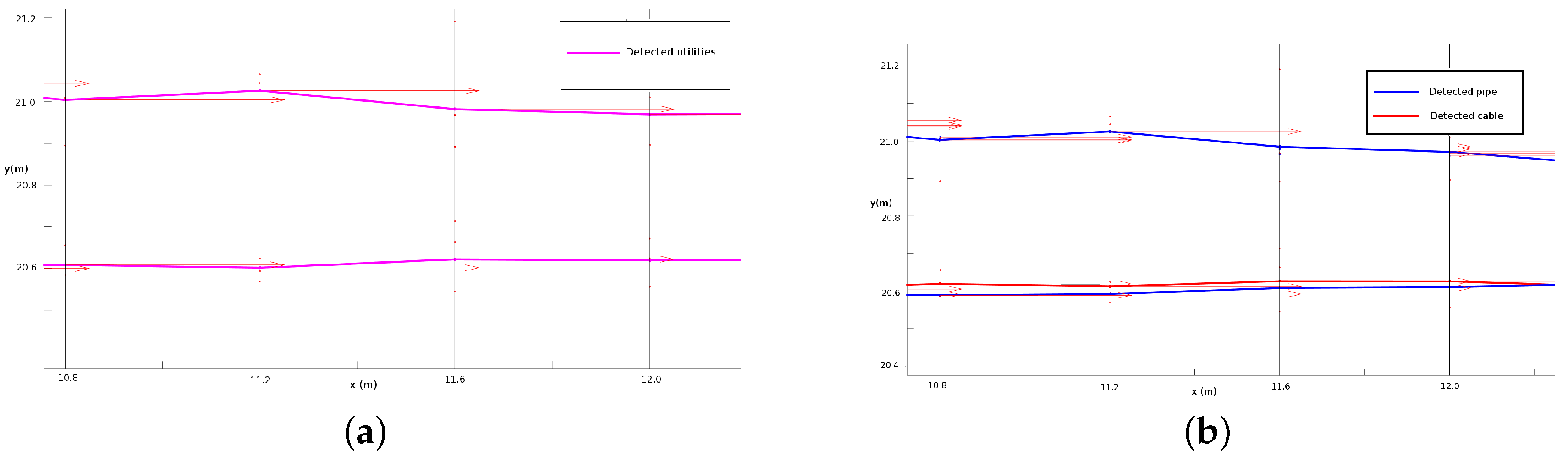
5.2.4. Experiment 2: MCS Algorithm with Virtual Scan Lines for Multiple Groups of Sensor Data
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Derivation of Equation (7)
Appendix B.
| Algorithm B1: Pseudo-Code of the Proposed MCS Algorithm |
 |
References
- Burtwell, M.; Faraghe, E.R.; Neville, D.; Overton, C.; Roger, C.; Woodward, T. Locating Underground Plant and Equipment Proposals for a Research Programme; UK Water Industry Research: London, UK, 2004. [Google Scholar]
- Metje, N.; Atkins, P.; Brennan, M.; Chapman, D.; Lim, H.; Machell, J.; Muggleton, J.; Pennock, S.; Ratcliffe, J.; Redfern, M.; et al. Mapping the Underworld-State-of-the-art review. Tunn. Undergr. Space Technol. 2007, 22, 568–586. [Google Scholar] [CrossRef]
- Muggleton, J.; Brennan, M.; Gao, Y. Determining the location of buried plastic water pipes from measurements of ground surface vibration. J. Appl. Geophys. 2011, 75, 54–61. [Google Scholar] [CrossRef]
- Muggleton, J.; Papandreou, B. A shear wave ground surface vibration technique for the detection of buried pipes. J. Appl. Geophys. 2014, 106, 164–172. [Google Scholar] [CrossRef]
- Muggleton, J.; Brennan, M.; Rogers, C. Point vibration measurements for the detection of shallow-buried objects. Tunn. Undergr. Space Technol. 2014, 39, 27–33. [Google Scholar] [CrossRef]
- Goddard, K.F.; Wang, P.; Lewin, P.L.; Swingler, S.G. Detection and location of underground cables using magnetic field measurements. Meas. Sci. Technol. 2012, 23, 1–9. [Google Scholar] [CrossRef]
- Foo, K.; Atkins, P.; Thomas, A.; Rogers, C. Capacitive-Coupled Electric-Field Sensing for Urban Sub-Surface Mapping: Motivations and Practical Challenges. In Proceedings of the International Conference on Frontiers in Shallow Subsurface Technology, Delft, The Netherlands, 20–22 January 2010.
- Mertens, L.; Persico, R.; Matera, L.; Lambot, S. Automated detection of reflection hyperbolas in complex GPR images with no a priori knowledge on the medium. IEEE Trans. Geosci. Remote Sens. 2016, 54, 580–596. [Google Scholar] [CrossRef]
- Chen, H.; Cohn, A.G. Probabilistic conic mixture model and its applications to mining spatial ground penetrating radar data. In Proceedings of the Workshops in SIAM Conference on Data Mining (SDM10), Columbus, OH, USA, 1 May 2010.
- Metje, N.; Chapman, D.N.; Cheneler, D.; Ward, M.; Thomas, A.M. Smart pipes-instrumented water pipes, can this be made a reality? Sensors 2011, 11, 7455–7475. [Google Scholar] [CrossRef] [PubMed]
- Royal, A.C.D.; Atkins, P.R.; Brennan, M.J.; Chapman, D.N.; Chen, H.; Cohn, A.G.; Foo, K.Y.; Goddard, K.F.; Hayes, R.; Hao, T.; et al. Site assessment of multiple-sensor approaches for buried utility detection. Int. J. Geophys. 2011, 2011, 1–19. [Google Scholar] [CrossRef]
- Dutta, R.; Cohn, A.G.; Muggleton, J.M. 3D mapping of buried underworld infrastructure using dynamic Bayesian network based multi-sensory image data fusion. J. Appl. Geophys. 2013, 92, 8–19. [Google Scholar] [CrossRef]
- Li, S.; Cai, H.; Kamat, V.R. Uncertainty-aware geospatial system for mapping and visualizing underground utilities. Autom. Constr. 2015, 53, 105–119. [Google Scholar] [CrossRef]
- Chen, H.; Cohn, A.G. Buried utility pipeline mapping based on multiple spatial data sources: a Bayesian data fusion approach. In Proceedings of the Twenty-Second International Joint Conference on Artificial Intelligence, Barcelona, Spain, 16–22 July 2011.
- Maybeck, P. Stochastic Models, Estimation and Control; Academic Press: New York, NY, USA, 1982. [Google Scholar]
- Jazwinski, A.H. Stochastic Processes and Filtering Theory; Academic Press: New York, NY, USA, 1970. [Google Scholar]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation; John Wiley & Sons, Inc.: New York, NY, USA, 2001. [Google Scholar]
- Sarkka, S. Bayesian Filtering and Smoothing; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Kim, C.; Li, F.; Ciptadi, A.; Rehg, J.M. Multiple hypothesis tracking revisited. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 11–18 December 2015.
- Dou, Q.; Wei, L.; Magee, D.; Cohn, A. Real Time Hyperbolae Recognition and Fitting in GPR Data. IEEE Trans. Geosci. Remote Sens. 2016. [Google Scholar] [CrossRef]
- Wang, P.; Goddard, K.; Lewin, P.; Swingler, S. Electromagnetic Field Application to Underground Power Cable Detection. In Proceeding of the International Symposium on High Voltage Engineering, Hannover, Germany, 22–26 August 2011.
- Muggleton, J.; Papandreou, B.D.; Brennan, M. Detection of Buried Pipes using a Shear Wave Ground Surface Vibration Technique. In Proceeding of the 19th International Congress on Sound and Vibration, Vilnius, Lithuania, 8–12 July 2012.
- Zhu, S.; Wang, J.; Su, Y.; Sato, M. A circular survey for 3D ground penetrating radar to map hidden cylinders. In Proceeding of the 7th International Workshop on Advanced Ground Penetrating Radar (IWAGPR), Nantes, France, 2–5 July 2013.
- Zoubir, A.M.; Chant, I.J.; Brown, C.L.; Barkat, B.; Abeynayake, C. Signal processing techniques for landmine detection using impulse ground penetrating radar. IEEE Sens. J. 2002, 2, 41–51. [Google Scholar] [CrossRef]
- Swingler, S.; Wang, P.; Hao, T.; Chapman, D.; Curioni, G.; Foo, K.; Atkins, P.; CDF, R. Flangeless open-ended coaxial probes with curved surface. In Proceeding of the IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011.
- Wang, P.; Goddard, K.F.; Lewin, P.L.; Swingler, S.G.; Atkins, P.R.; Foo, K. Magnetic Field Measurement to Detect and Locate Underground Power Cable. In Proceeding of the International Conference on Pipelines and Trenchless Technology, Beijing, China, 26–29 October 2011.
- McKenna, S.P.; Parkman, K.B.; Perren, L.J.; McKenna, J.R. Automatic Detection of a Subsurface Wire Using an Electromagnetic Gradiometer. IEEE Trans. Geosci. Remote Sens. 2013, 51, 132–139. [Google Scholar] [CrossRef]
- Opfer, J.; Yeo, Y.; Pierce, J.; Rorden, L. A superconducting second-derivative gradiometer. IEEE Trans. Magn. 1974, 10, 536–539. [Google Scholar] [CrossRef]
- Manning, C.D.; Raghavan, P.; Schütze, H. Introduction to Information Retrieval; Cambridge University Press: Cambridge, UK, 2008. [Google Scholar]
- Cox, H. On the estimation of state variables and parameters for noisy dynamic systems. IEEE Trans. Autom. Control 1964, 9, 5–12. [Google Scholar] [CrossRef]
- Rauch, H.E.; Tung, F.; Striebel, C.T. Maximum likelihood estimates of linear dynamic systems. AIAA J. 1965, 3, 1445–1450. [Google Scholar] [CrossRef]
- Sage, A.P.; Melsa, J.L. Estimation Theory with Applications to Communications and Control; McGraw-Hill Inc.: New York, NY, USA, 1971. [Google Scholar]
- Jolliffe, I. Principal Component Analysis; Springer: New York, NY, USA, 1986. [Google Scholar]
- Mapping the Underworld Brochure. Available online: http://www.mappingtheunderworld.ac.uk/MTU%20Brochure%20Final%20Version.pdf (accessed on 3 October 2016).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors | MCS (Actual sls) | MCS (Virtual sls) | ||||
|---|---|---|---|---|---|---|
| Tarmac Area | Grass Area | Whole Area | ||||
| S1 | 0.57 | 0.12 | 0.84 | 0.06 | 0.58 | 0.08 |
| S2 | 0.38 | 0.05 | 0.27 | 0.03 | 0.27 | 0.04 |
| S3 | 0.66 | 0.07 | 0.60 | 0.07 | 0.40 | 0.07 |
| S4 | 0.53 | 0.05 | 0.53 | 0.07 | 0.51 | 0.08 |
| S1-2 | 0.81 | 0.06 | 0.89 | 0.05 | 0.74 | 0.07 |
| S1-3 | 0.81 | 0.05 | 0.82 | 0.04 | 0.85 | 0.07 |
| S1-4 | 0.54 | 0.05 | 0.88 | 0.04 | 0.69 | 0.07 |
| S2-3 | 0.65 | 0.04 | 0.61 | 0.05 | 0.50 | 0.06 |
| S2-4 | 0.91 | 0.05 | 0.81 | 0.05 | 0.78 | 0.07 |
| S3-4 | 0.91 | 0.05 | 0.89 | 0.04 | 0.85 | 0.07 |
| S1-2-3 | 0.84 | 0.05 | 0.89 | 0.04 | 0.98 | 0.07 |
| S1-2-4 | 0.92 | 0.05 | 0.93 | 0.04 | 0.90 | 0.07 |
| S1-3-4 | 0.93 | 0.05 | 0.93 | 0.03 | 0.89 | 0.06 |
| S2-3-4 | 0.93 | 0.05 | 0.89 | 0.04 | 0.90 | 0.07 |
| S1-2-3-4 | 0.94 | 0.04 | 0.93 | 0.03 | 0.93 | 0.04 |
| Sensor | : Pipes | : Cables | : Others |
|---|---|---|---|
| GPR | 0.5 | 0.35 | 0.15 |
| PMF | 0.05 | 0.9 | 0.05 |
| MG | 0.05 | 0.9 | 0.05 |
| LFEM | 0.45 | 0.45 | 0.1 |
| VA | 0.85 | 0.1 | 0.05 |
| Sensors/Results | MCS Algorithm | |
|---|---|---|
| GPR | 0.64 | 0.25 |
| GPR + PMF | 0.68 | 0.23 |
| GPR + PMF + MG | 0.71 | 0.23 |
| GPR + PMF + MG + LFEM | 0.85 | 0.20 |
| GPR + PMF + MG + LFEM + VA | 0.92 | 0.20 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dou, Q.; Wei, L.; Magee, D.R.; Atkins, P.R.; Chapman, D.N.; Curioni, G.; Goddard, K.F.; Hayati, F.; Jenks, H.; Metje, N.; et al. 3D Buried Utility Location Using A Marching-Cross-Section Algorithm for Multi-Sensor Data Fusion. Sensors 2016, 16, 1827. https://doi.org/10.3390/s16111827
Dou Q, Wei L, Magee DR, Atkins PR, Chapman DN, Curioni G, Goddard KF, Hayati F, Jenks H, Metje N, et al. 3D Buried Utility Location Using A Marching-Cross-Section Algorithm for Multi-Sensor Data Fusion. Sensors. 2016; 16(11):1827. https://doi.org/10.3390/s16111827
Chicago/Turabian StyleDou, Qingxu, Lijun Wei, Derek R. Magee, Phil R. Atkins, David N. Chapman, Giulio Curioni, Kevin F. Goddard, Farzad Hayati, Hugo Jenks, Nicole Metje, and et al. 2016. "3D Buried Utility Location Using A Marching-Cross-Section Algorithm for Multi-Sensor Data Fusion" Sensors 16, no. 11: 1827. https://doi.org/10.3390/s16111827
APA StyleDou, Q., Wei, L., Magee, D. R., Atkins, P. R., Chapman, D. N., Curioni, G., Goddard, K. F., Hayati, F., Jenks, H., Metje, N., Muggleton, J., Pennock, S. R., Rustighi, E., Swingler, S. G., Rogers, C. D. F., & Cohn, A. G. (2016). 3D Buried Utility Location Using A Marching-Cross-Section Algorithm for Multi-Sensor Data Fusion. Sensors, 16(11), 1827. https://doi.org/10.3390/s16111827