1. Introduction
Kompsat-3A, which was launched on 25 March 2015, is a sister spacecraft of the Kompsat-3 developed by the Korea Aerospace Research Institute (KARI). Kompsat-3A’s AEISS-A (Advanced Electronic Image Scanning System-A) camera is similar to Kompsat-3’s AEISS but it was designed to provide PAN (Panchromatic) resolution of 0.55 m, MS (multispectral) resolution of 2.20 m, and TIR (thermal infrared) at 5.5 m resolution as presented in
Table 1. The altitude of Kompsat-3A is 528 km—which is lower than that of Kompsat-3 (685 km)—for better spatial resolution, sacrificing the swath width.
In-orbit geometric calibration and validation of high-resolution Earth-observation satellites is important because various impulses and vibrations during the launch process may have affected the satellite’s payload [
1,
2,
3,
4,
5,
6,
7,
8]. Therefore, the in-orbit geometric calibration process determines the focal length, the distortions of lenses, CCD (charge-coupled device) alignments, and other geometric distortions. For this purpose, bundle adjustments are carried out utilizing GCPs (ground control points) at the reference sites that give accurate location information. This leads to the elimination of a series of systematic errors and reduction of correlation between the interior and exterior orientation parameters to improve the geometric accuracy. Then the validation process is conducted to check and ensure the mapping accuracy.
The geometric calibration and validation of the Kompsat-3A AEISS-A camera have been completed [
9]. The geometric calibration consisted of two phases. At phase I, AOCS (attitude and orbit control subsystem) in-orbit calibration was performed with the satellite’s position and attitude data, which are estimated through time synchronization of GPS, AOCS, and payloads. Phase II included the calibration of CCD alignments and the focal length, the CCD overlap area correction, and band-to-band alignments. This was followed by the validation of positional accuracy.
In this paper, we introduce the Kompsat-3A AEISS-A camera and the physical sensor model that incorporates the interior and exterior orientation parameters. Based on the rigorous sensor model, the geometric calibration method of Kompsat-3A will be explained. This includes the boresight calibration, and the calibration of the CCD alignments and the focal length. Then we present the results of the geometric calibration and validation including not only the aforementioned sensor calibrations but the merge of sub-images and the band-to-band registrations. Finally, the positional accuracy after the calibration is presented.
2. Kompsat-3A AEISS-A Camera
2.1. AEISS-A Sensor
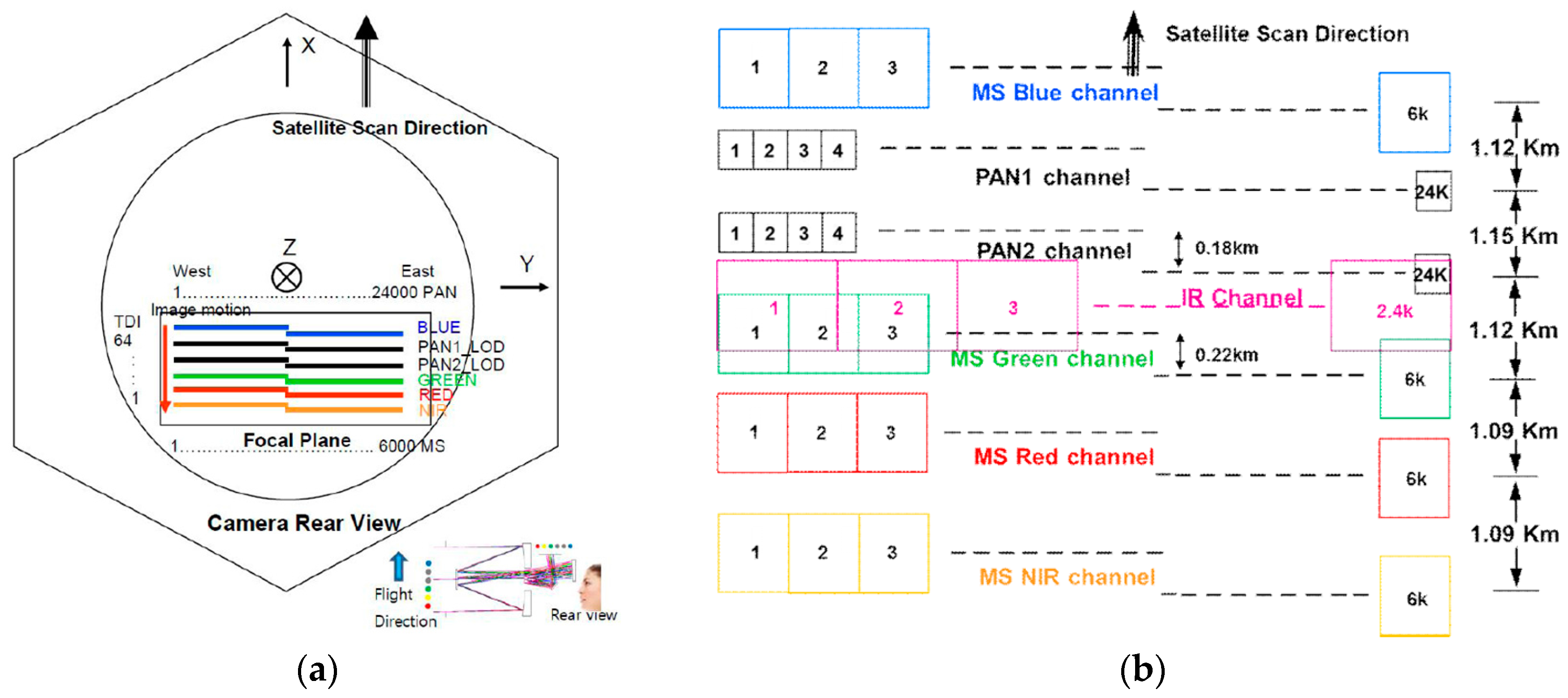
Figure 1a shows the configuration of Kompsat-3A AEISS-A camera. Blue, PAN1, PAN2, TIR, green, red, and near-infrared (NIR) channels are aligned in a unifocal camera.
Figure 1b depicts the design of PAN, MS, and TIR (written IR in the figure). The gaps between the sensors in the focal plane correspond to the differences of the projection centers. The telescope uses a Korsch combination with three aspheric mirrors and two folding mirrors, using an aperture diameter of 80 cm. This design was chosen because of its simplicity and compact size, allowing it to fit within the small spacecraft platform. Also, the camera was designed to minimize the aberration.
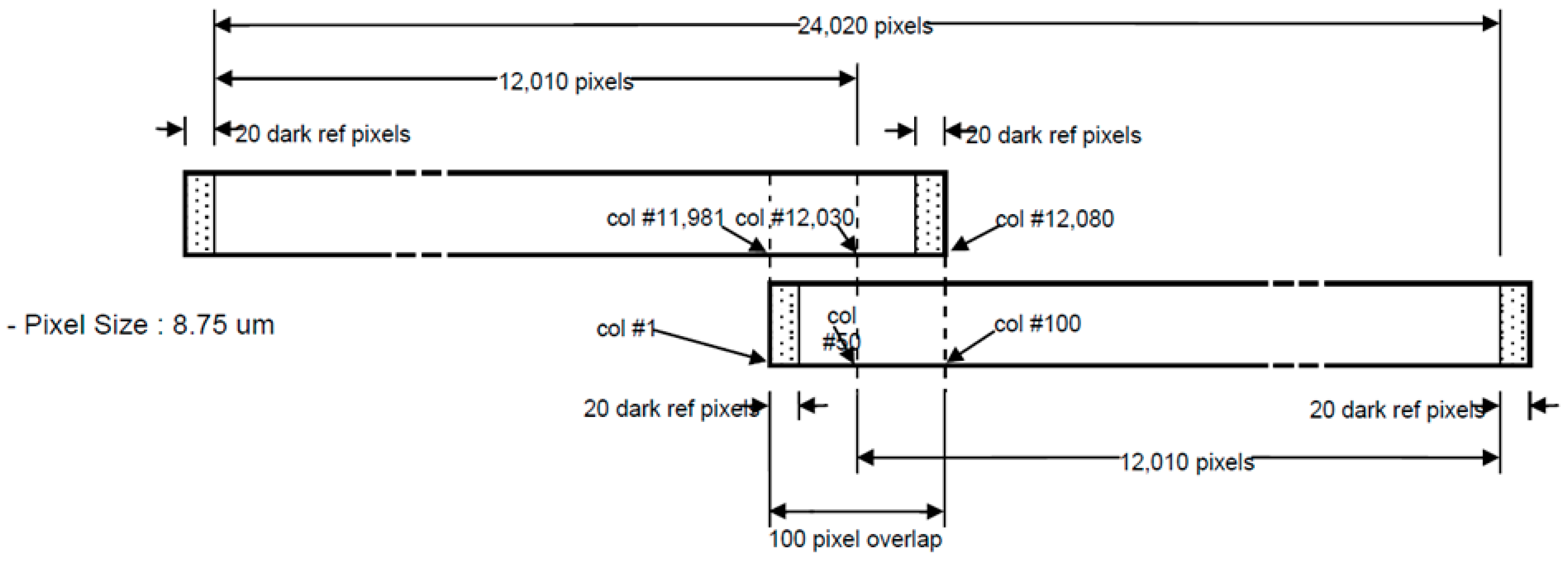
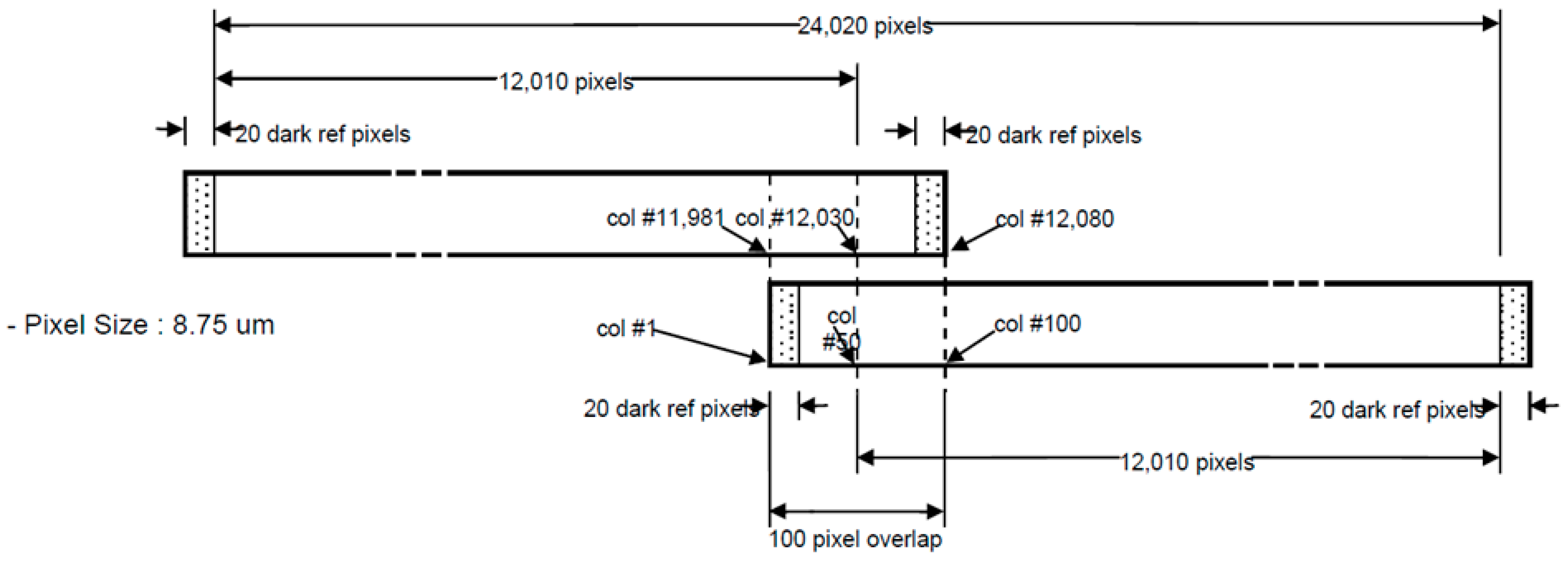
Figure 2 presents the detailed configuration of the panchromatic CCD-lines [
10]. A single CCD-line consists of 12,080 pixels with 20 dark pixels on each side and the overlapping area is 100 pixels in the center. The pixel size is 8.75 micron. Each CCD-line produces a single subimage with overlapping areas, and the two produced subimages must be merged together into a single image that is 24,020 pixels of image width.
2.2. Physical Sensor Modeling
The physical sensor model of Kompsat-3A is in a nonlinear form of projection from a given ground point in an Earth-centered Earth-fixed (ECEF) coordinate frame to a point in the body coordinate frame as shown in Equations (1) and (2). We call this the forward model. The exterior orientation parameters (EOPs) can be interpolated from the ephemeris data given an instant time.
where
is the ground point in the ECEF coordinate frame,
is the satellite position in the ECEF coordinate frame,
is the time-dependent rotation matrix from the ECEF coordinate frame to the inertial coordinate frame,
is the time-dependent rotation matrix from the inertial coordinate frame to the body coordinates frame,
is the boresight rotation matrix,
are the coordinates in the body coordinate frame (
is the flight direction,
is the direction to the Earth, and
completes the right-handed coordinate system), and
is the scale factor.
The position and the rotation of the satellite at time
can be computed using Equation (3). A scan time
corresponding to an image line is used for the computation of the position and the rotation using the Lagrange interpolation of 8 neighboring ephemeris data.
where
is the position and the rotation of the satellite at time
.
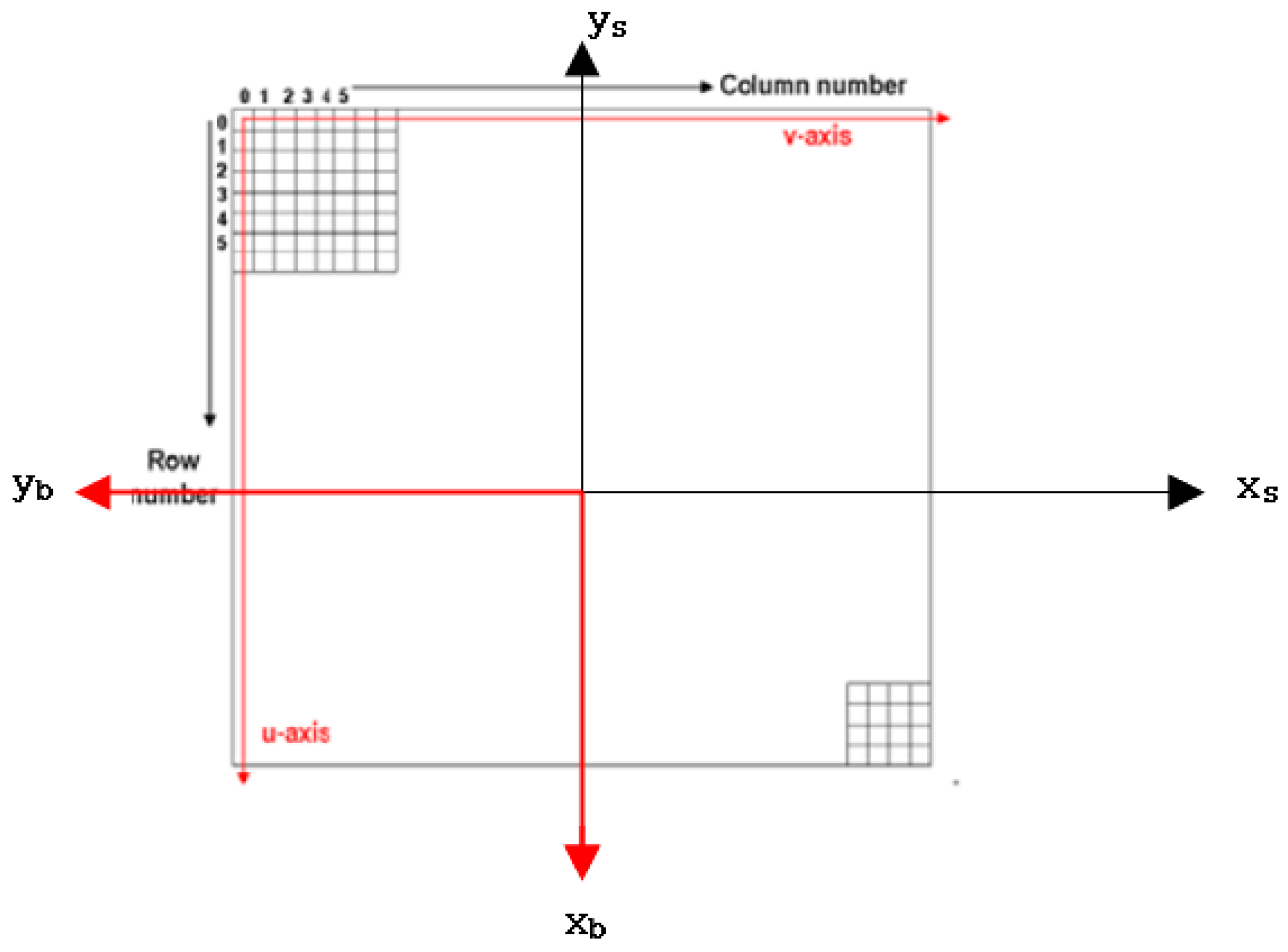
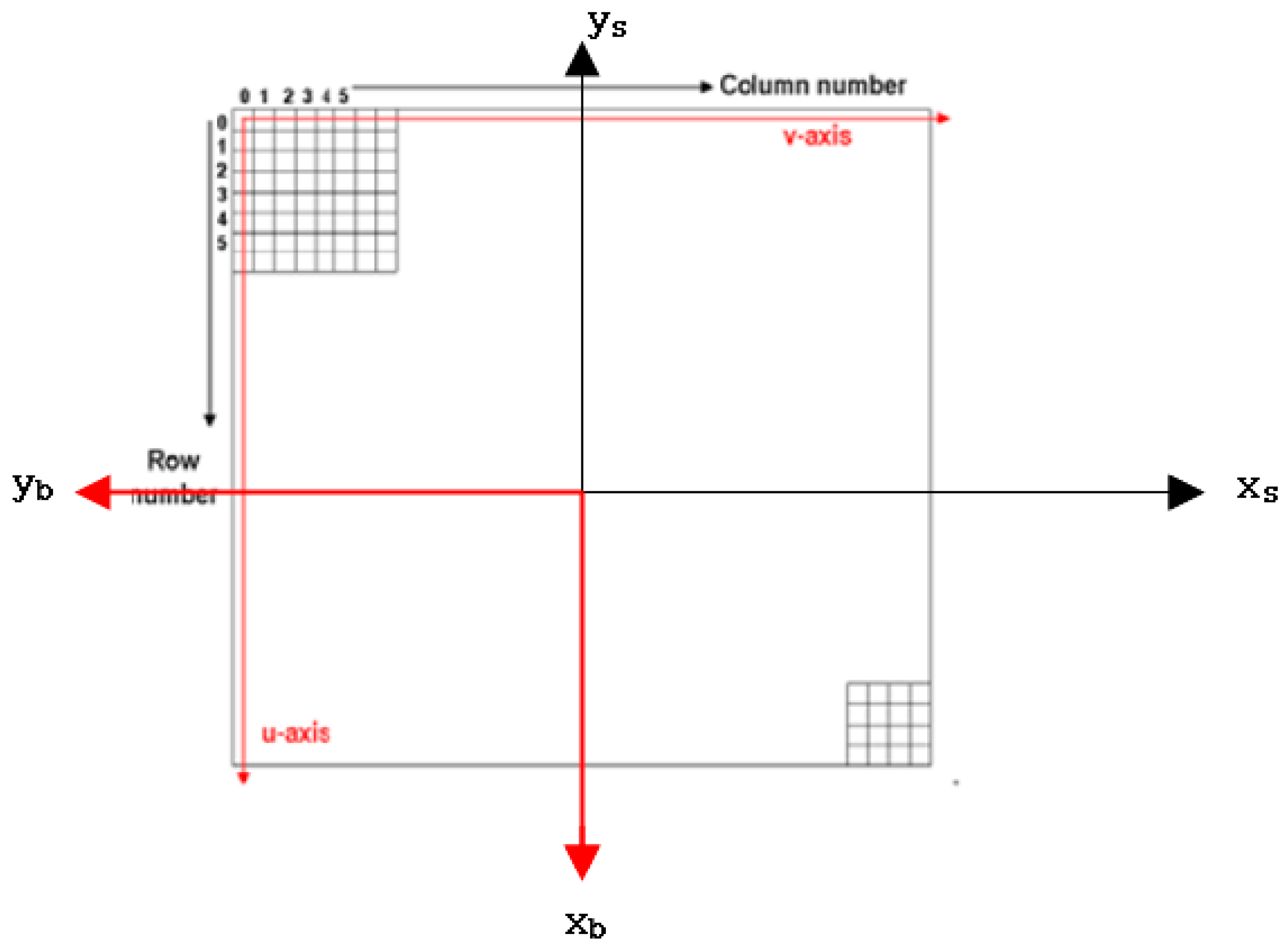
The relationship between the sensor coordinate frame and the body coordinates frame is presented in
Figure 3 and Equation (4). In,
show the sensor coordinate frame and
completes the right-handed coordinate system.
where
is the transformation matrix from the body coordinate frame to the sensor coordinate frame, and
is the focal length.
The sensor coordinates can be converted from the image coordinates using CCD-line alignment information parameters as shown in Equation (5). An individual CCD-line requires unique alignment parameters. The CCD alignment equation was determined based on the precise calibration performed before the launch. The second-order equation showed 0.01% difference compared to the reference, satisfying the requirement of distortion 0.2%.
where
is the CCD chip index,
are the
coordinates of the first pixel in the CCD chip,
are related to the pixel size (
is the nonlinearity part),
are the alignment parameters of the non-straight line CCD chip, and
is the column (sample) coordinate in pixels (
is for the first column of the CCD chip).
2.3. Sensor Geometric Calibrations
During the calibration process, the focal length, the boresight angles, and CCD alignment parameters are estimated. Removing the scale factor in Equation (2), observation equations can be established as Equation (6).
The first step of the AOCS absolute calibration is to perform the boresight calibration between the star tracker and the other payloads using GCPs (ground control points) located at calibration sites. To this end, the boresight rotation matrix
must be estimated.
The partial derivatives with respect to the boresight angles can be expressed as Equations (10) and (11), which show the case of the boresight roll angle. The same analogy is applied to the other angle cases, such as the pitch and yaw.
Secondly, the calibration of the focal length is simply carried out by deriving the partial derivatives with respect to the focal length as Equation (12).
Finally, the calibration for the CCD alignment parameters can also be carried out by computing partial derivatives as shown in Equation (13). Note that Kompsat-3A AEISS-A sensor consists of several CCD lines and they are calibrated all together. Note that
is the CCD chip index.
The partial derivatives with respect to the focal length, the boresight angles, and CCD alignment parameters, as well as EOPs (exterior orientation parameters) are used to form a design matrix
for the linearized observation equation in Equation (14) and iteratively solved using the least square adjustment as Equation (15). Note that the calibrations of boresight angles, focal length, and CCD alignment parameters are carried out sequentially to avoid large correlations among the parameters. Note that single iterative least squares can make the normal matrix not invertible. Therefore, other systems utilized a step-by-step approach for the geometric calibration [
11].
3. Geometric Calibration and Validation
3.1. Workflow
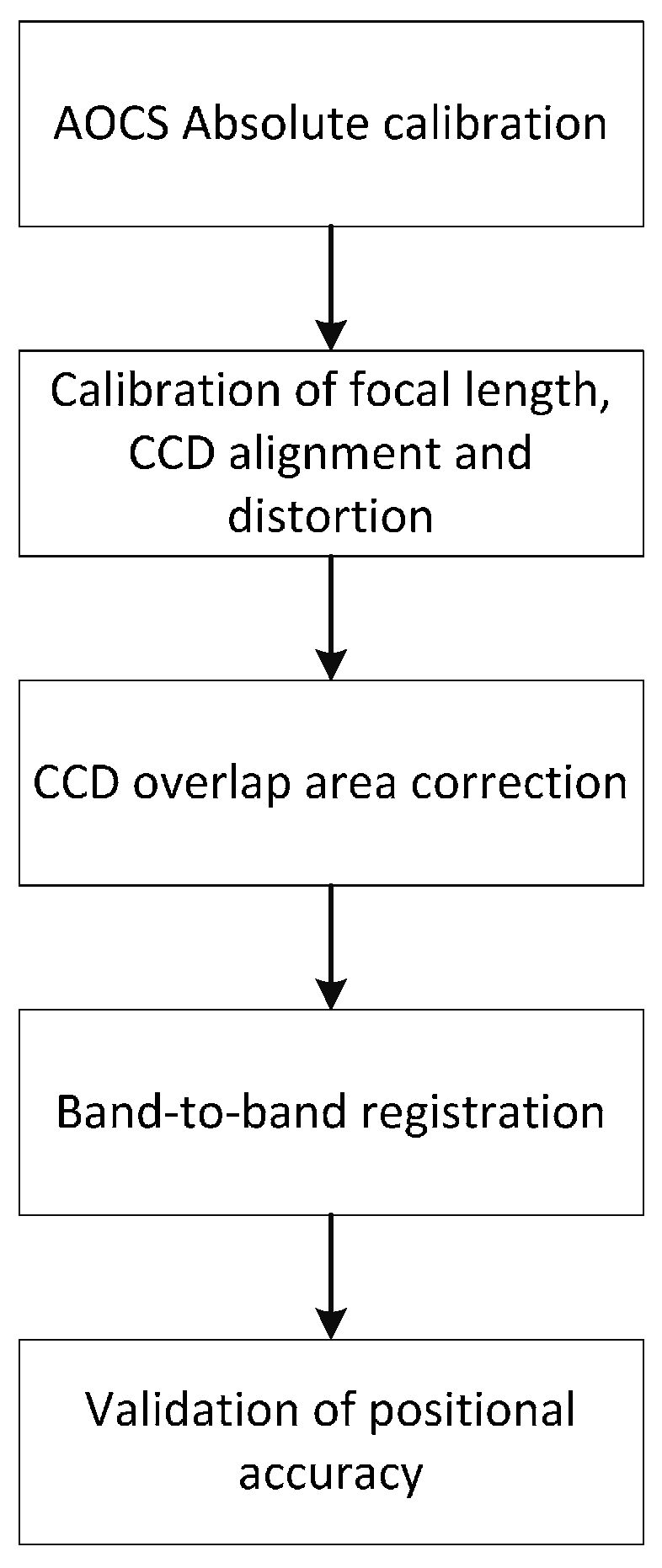
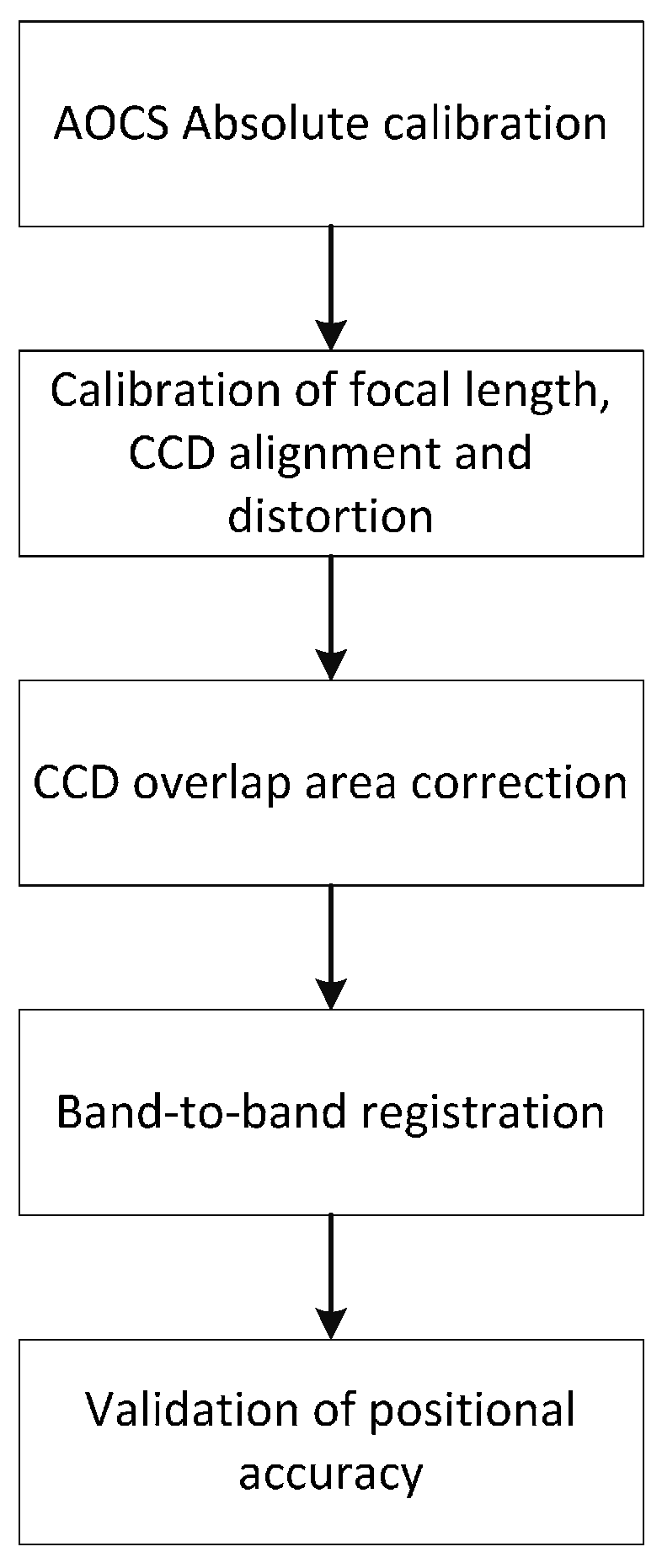
The geometric calibration consists of AOCS in-orbit calibration (boresight calibration), the focal length calibration, the calibration of CCD alignments, the CCD overlap area correction, and band-to-band registration, as shown in
Figure 4. The details on the AOCS absolute calibration, focal length, and the CCD alignments were presented in the previous section. For the CCD overlap area correction and band-to-band registration we applied the same merging process used for Kompsat-3 data [
10]. This method generates a grid of tie points over the subimages based on the physical sensor model and uses them for similarity transformation with the compensation of ephemeris and terrain variation.
3.2. Calibration Sites
We classified test sites into two categories according to their positional accuracies. Level 0 sites are located in several sites over Mongolia and Korea where about 150~180 circle targets of 3 m diameter were established. The coordinates of the targets were acquired by GNSS surveys and they showed the positional accuracy of 5 cm in RMSE (root mean square error). They were used for the CCD alignment, the focal length calibration, AOCS absolute calibration, and validation of mapping accuracy. Average 9~20 points were used for each scene.
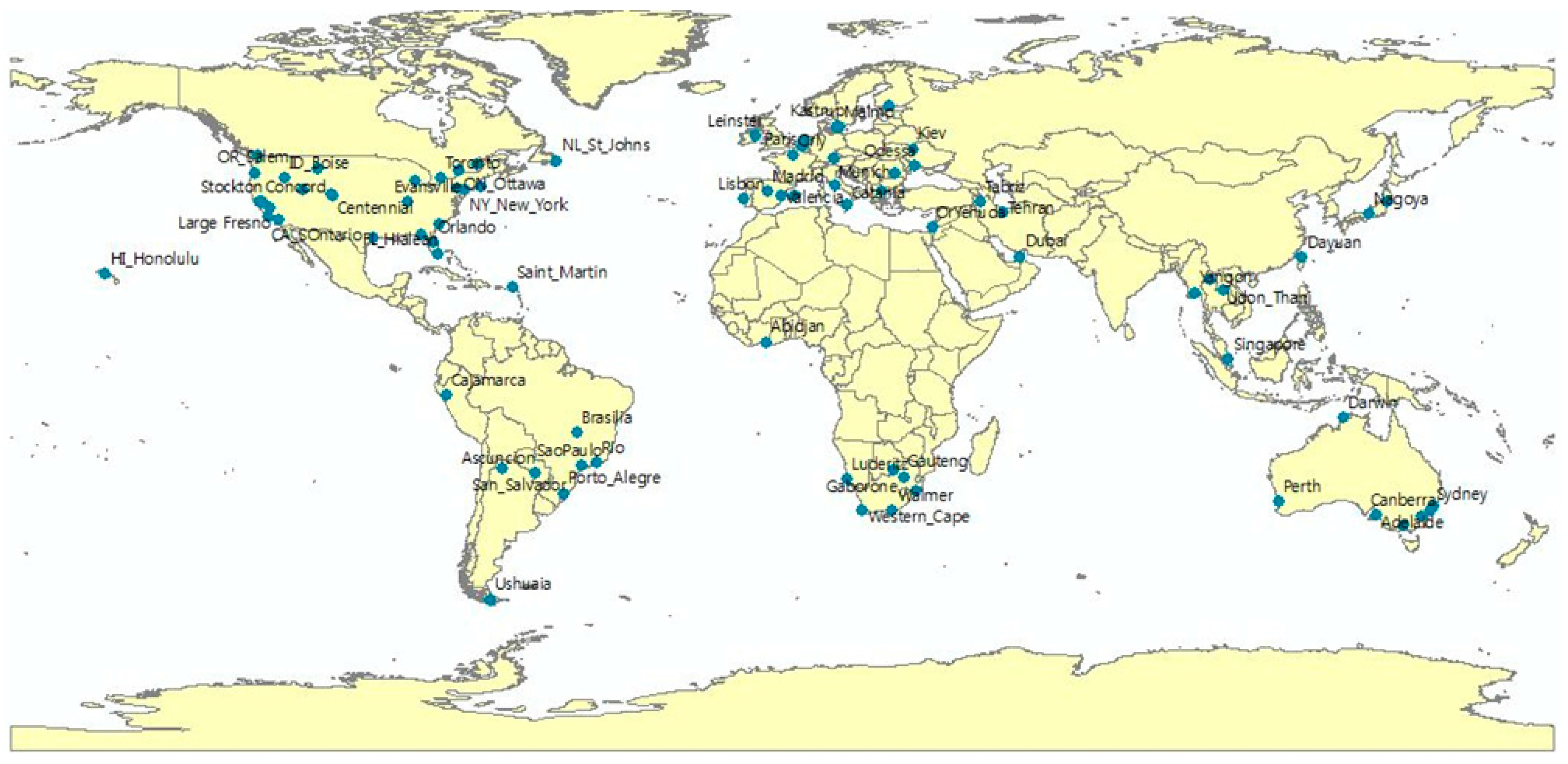
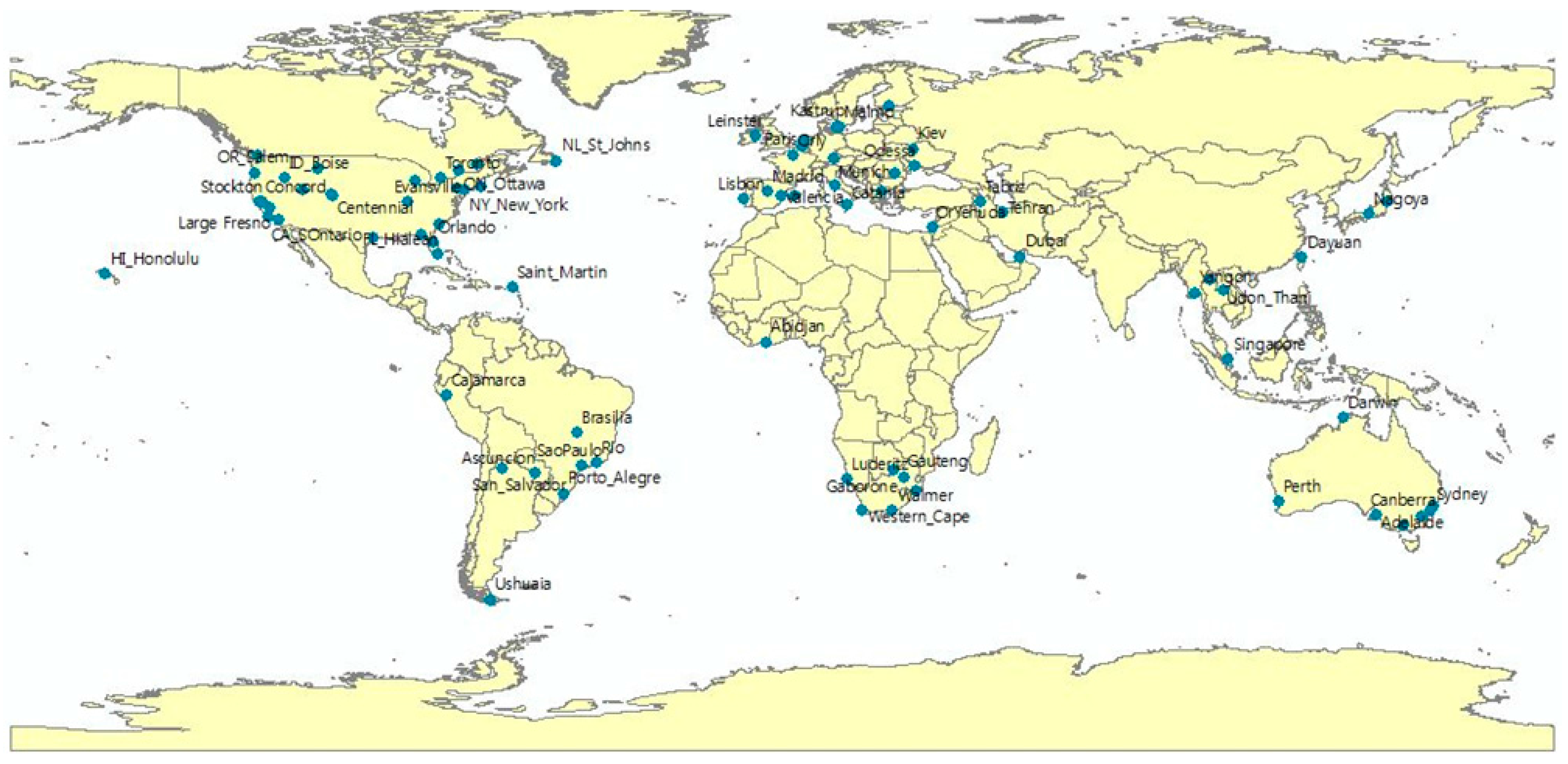
Level 1 sites are distributed at 82 locations across the world as shown in
Figure 5. Locations such as road intersection were global navigation satellite system (GNSS)-surveyed with about 70 cm accuracy in RMSE. Level 1 reference data were used for AOCS absolute calibration and validation of positional accuracy.
3.3. AOCS Absolute Calibration
First we conducted the AOCS absolute calibration. The accuracy of the AOCS absolute calibration highly depends on the accuracy of GCPs, and its reliability can also be affected by the temperature characteristics of the star tracker. Note that the accuracy of the star tracker used (Sodern SED36) is 1 arcsec for the cross-boresight and 6 arcsec for the boresight axis. This necessitated using the GCPs from different calibration sites of the southern and northern hemispheres to carry out the boresight calibration. We used five image strips over level 0 sites and six strips over the level 1 sites with difference roll angles ranging −25.5°~27.9° for the calibration as shown in
Table 2.
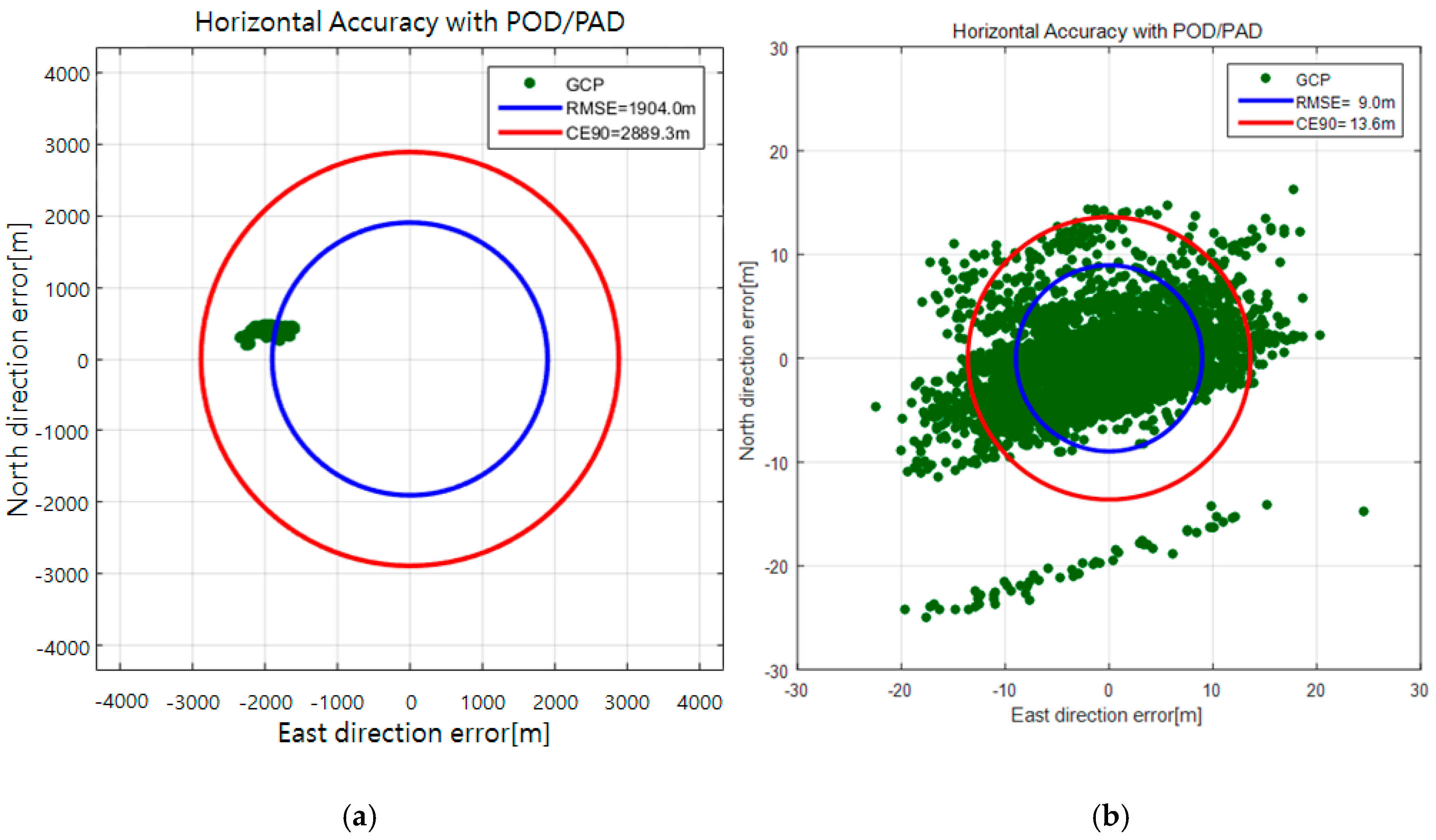
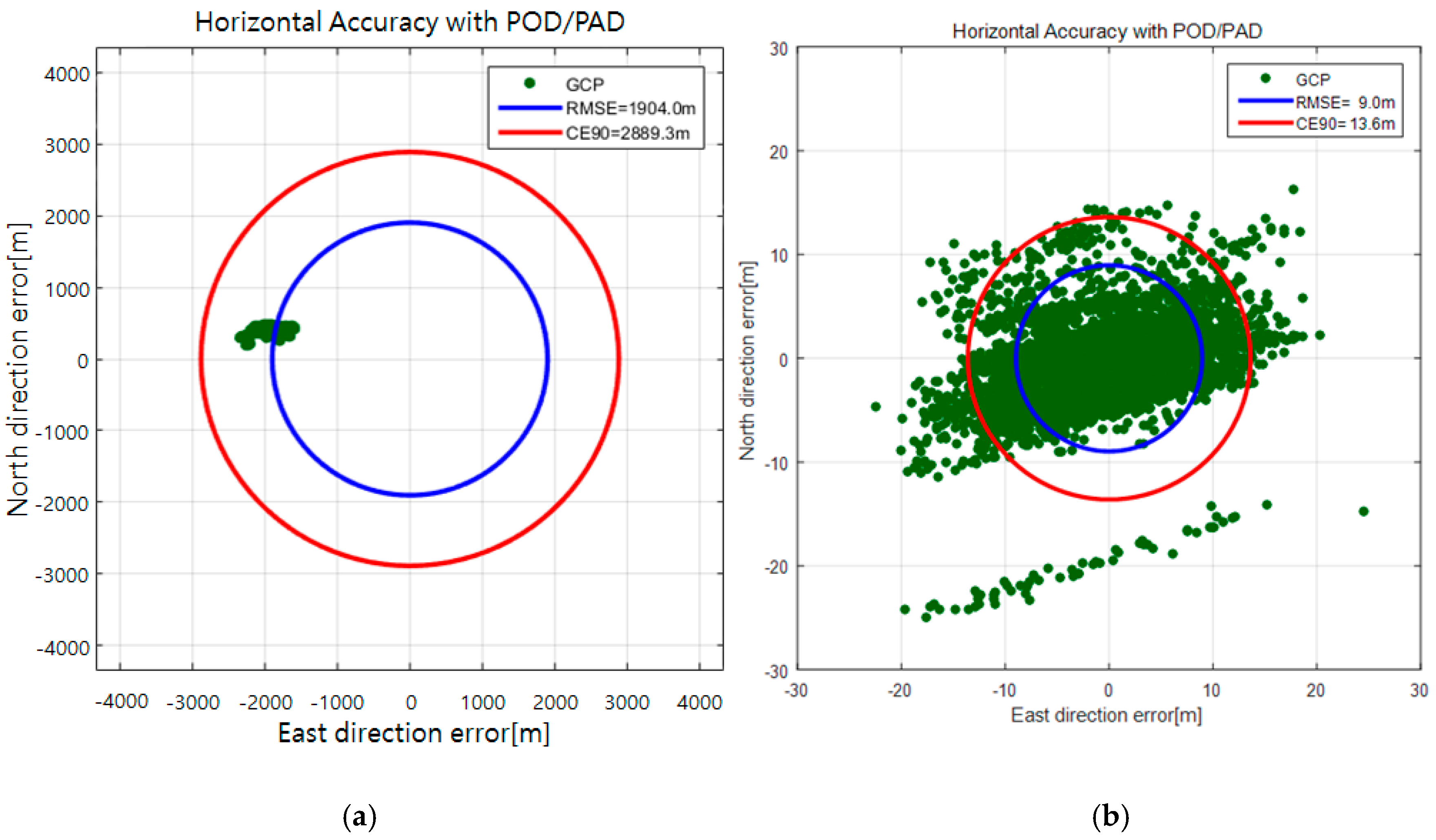
The result of the calibration, which is the rotation matrix
in Equation (1), was used to update the system. The horizontal accuracy of the check points was estimated to 2.9 km (CE90) before the calibration, but the error was reduced to 13.6 m (CE90) after the system update, as shown in
Figure 6.
3.4. Calibration of Focal Length and CCD Alignments
Focal length and CCD alignments are determined before the satellite launch, but the information may change due to the large acceleration during launch. Therefore, in-orbit calibrations should be carried out for better geometric accuracy.
For the in-orbit calibration of focal length and CCD alignment, we utilized 29 images acquired over level 0 calibration sites. The roll and pitch angle ranges are −29.1°~+30.3° and −1.1°~+1.2°, respectively. The focal length of the camera was determined to 8.56181 m and the determined alignment parameters for each CCD sensor are presented in
Table 3. Precisions of the calibration for each CCD line are less than one pixel and less than half-pixels for PAN and the others, respectively. Note that the across-track is the direction along the CCD lines and the along-track is opposite to the flight direction as shown in Equation (5).
and
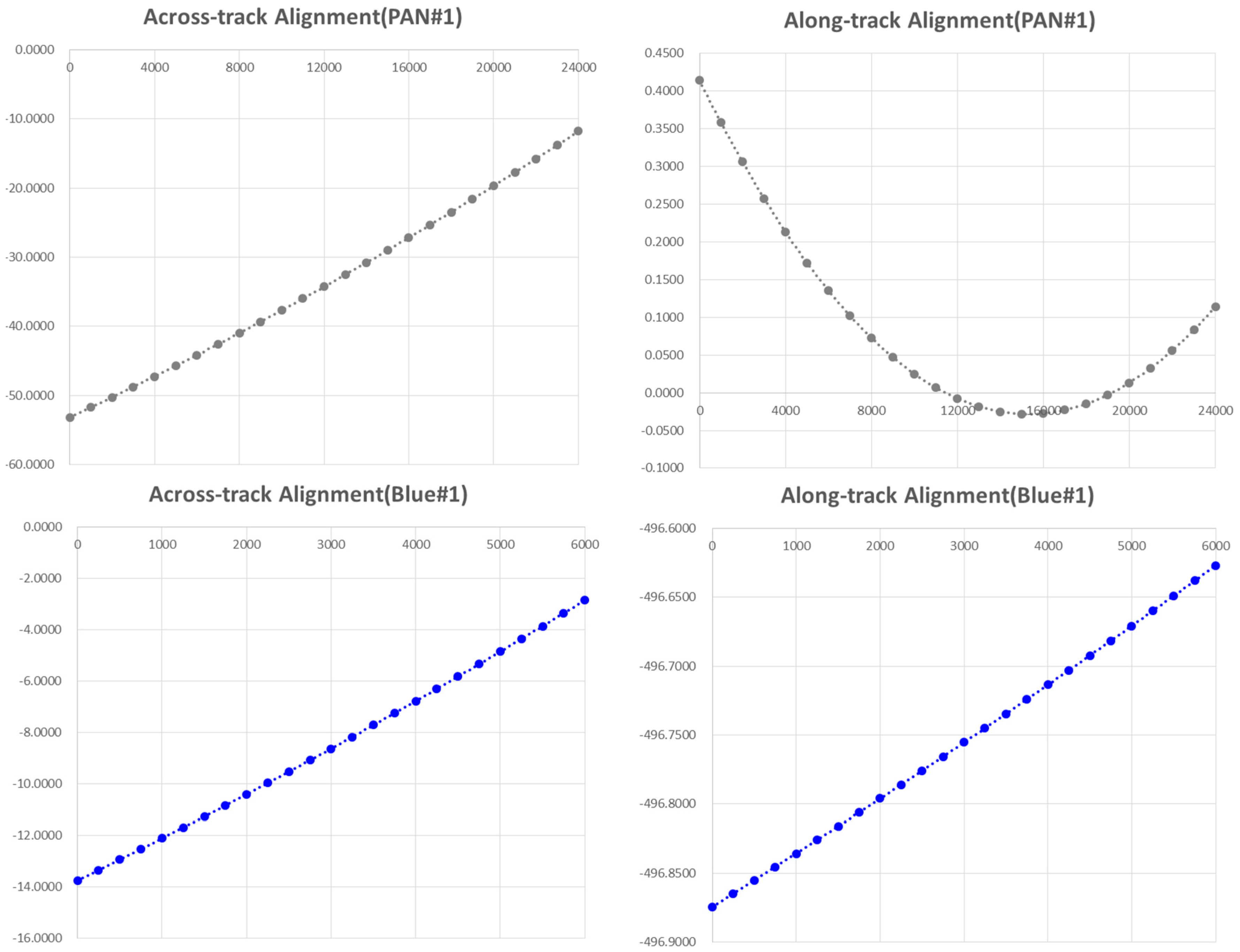
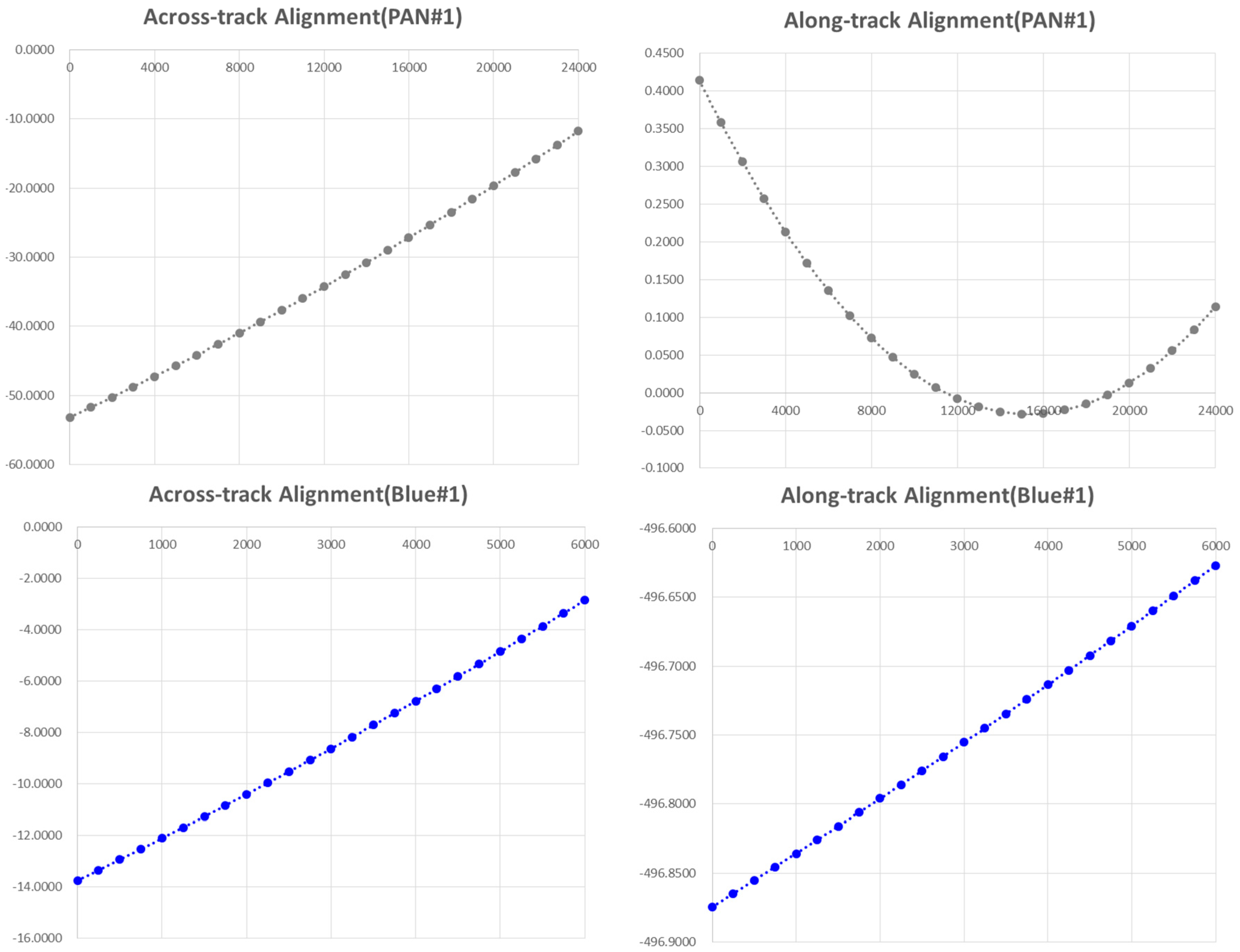
, linearity, and nonlinearity parameters of the pixel size are determined to be slightly larger than 1.0 and 0.0, respectively, meaning the pixel size is not exactly regular. Also, small but non-zero
values indicate non-straightness of the CCD lines. Thus we plotted the PAN#1 and BLUE#1 CCD lines to see the patterns (
Figure 7). PAN #1 shows that the non-regularity of the pixel size accumulates up to about 40 pixels in the across-track alignment. The along-track direction plot shows that the CCD is almost straight with less than half pixels of discrepancy. In case of BLUE#1, the non-regularity of the pixel is accumulated up to about 10 pixels and the non-straightness is about a quarter pixels.
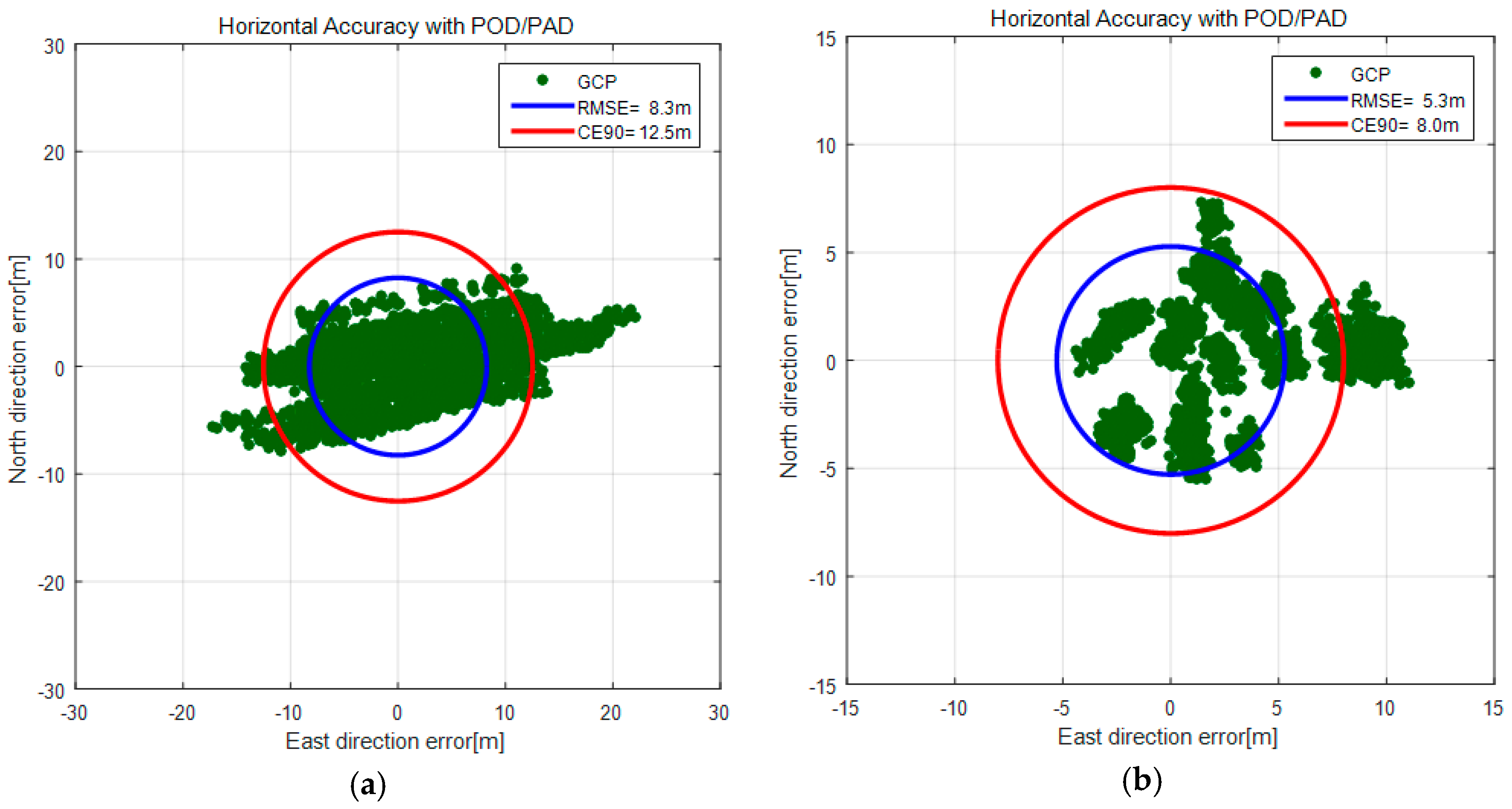
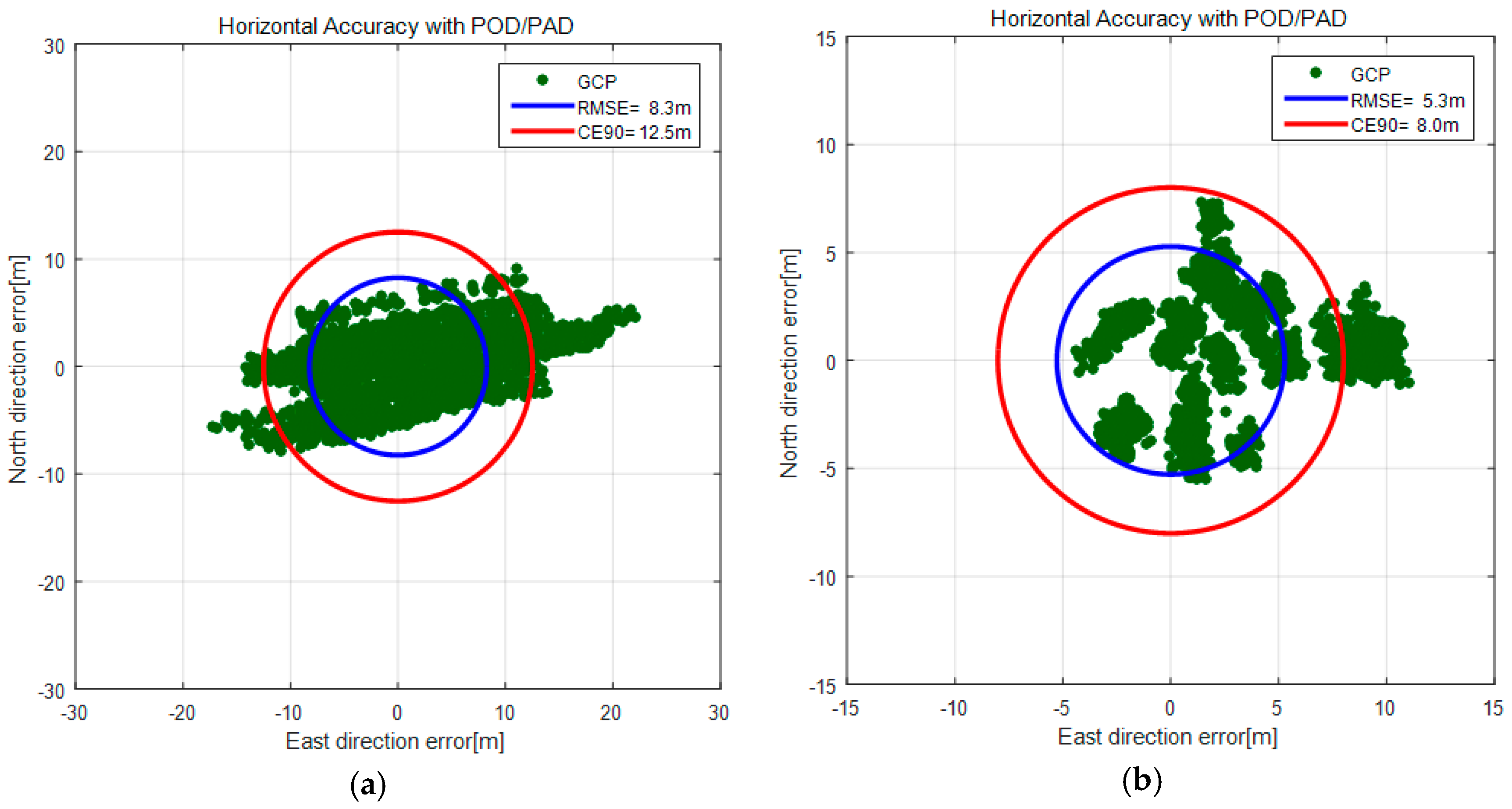
Figure 8 is the plotted horizontal accuracy of GCPs before and after the in-orbit CCD alignment calibration. We can clearly observe the accuracy improvement from 12.5 m (CE90) in
Figure 8a to 8.0 m (CE90) in
Figure 8b.
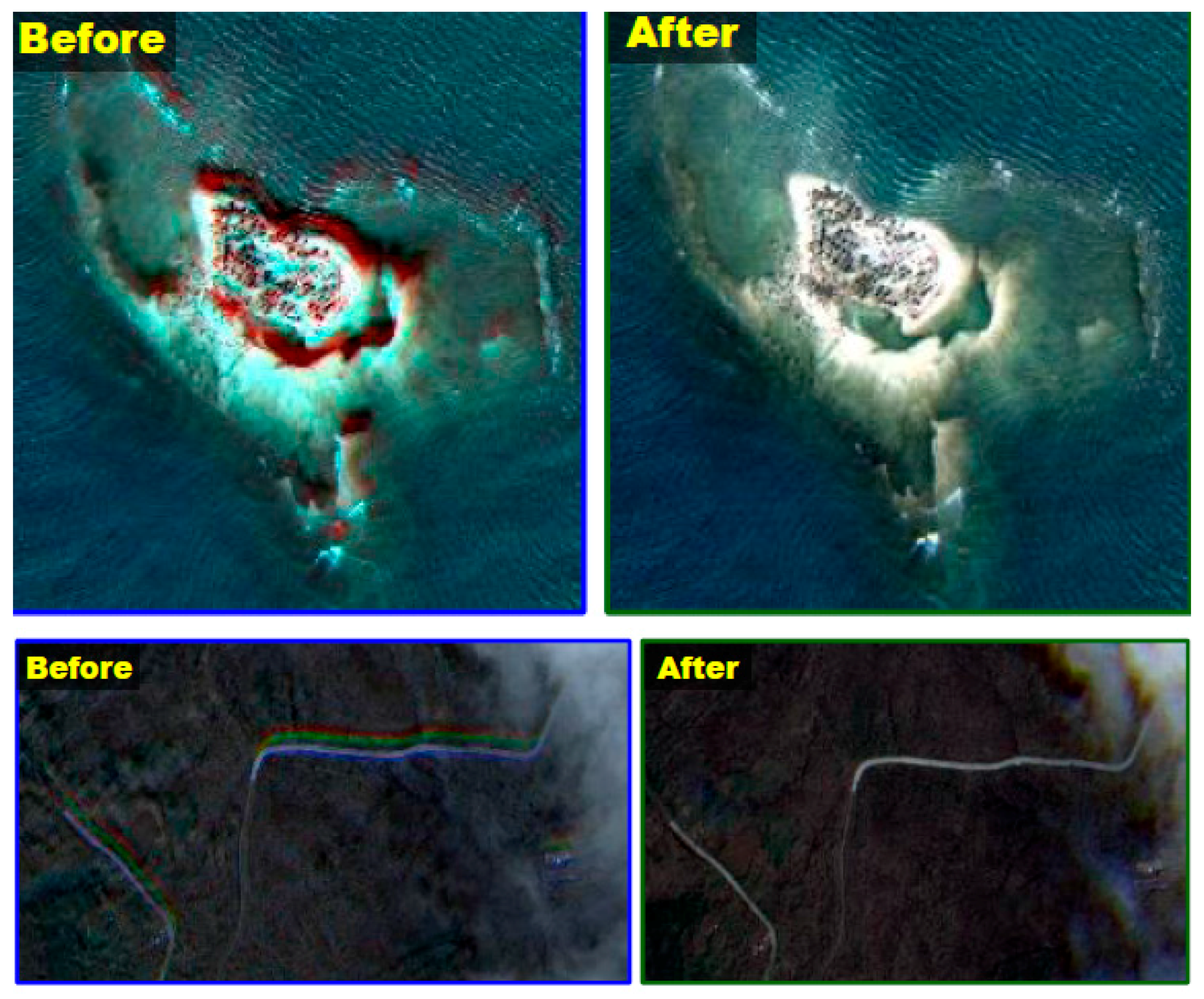
3.5. Merge of Subimages and Band-to-Band Registration
As described in
Figure 2, individual CCD lines of Kompsat-3A produce overlapping subimages. These subimages should be merged side-by-side for a larger swath width, but the process is not simple because the sensor alignment, ephemeris effects, and terrain elevations should be considered each time. We applied an automated approach using virtual tie points to estimate the shift and similarity transformation, as well as to compute compensations according to the satellite’s attitude differences and terrain elevations due to the gap between the CCD lines [
10].
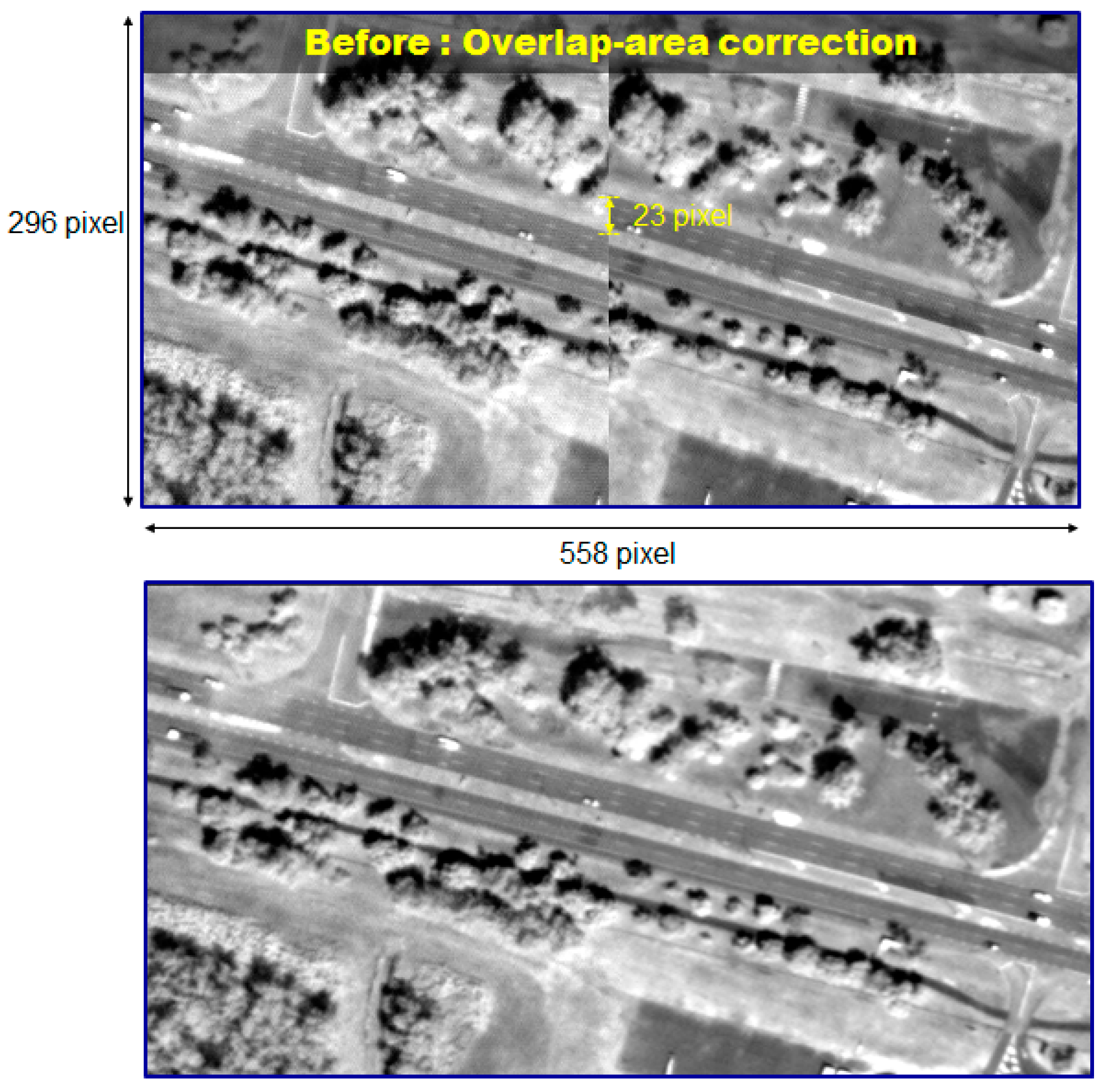
Figure 9 presents an example image before and after the merging. We can hardly identify the discrepancy by applying the process.
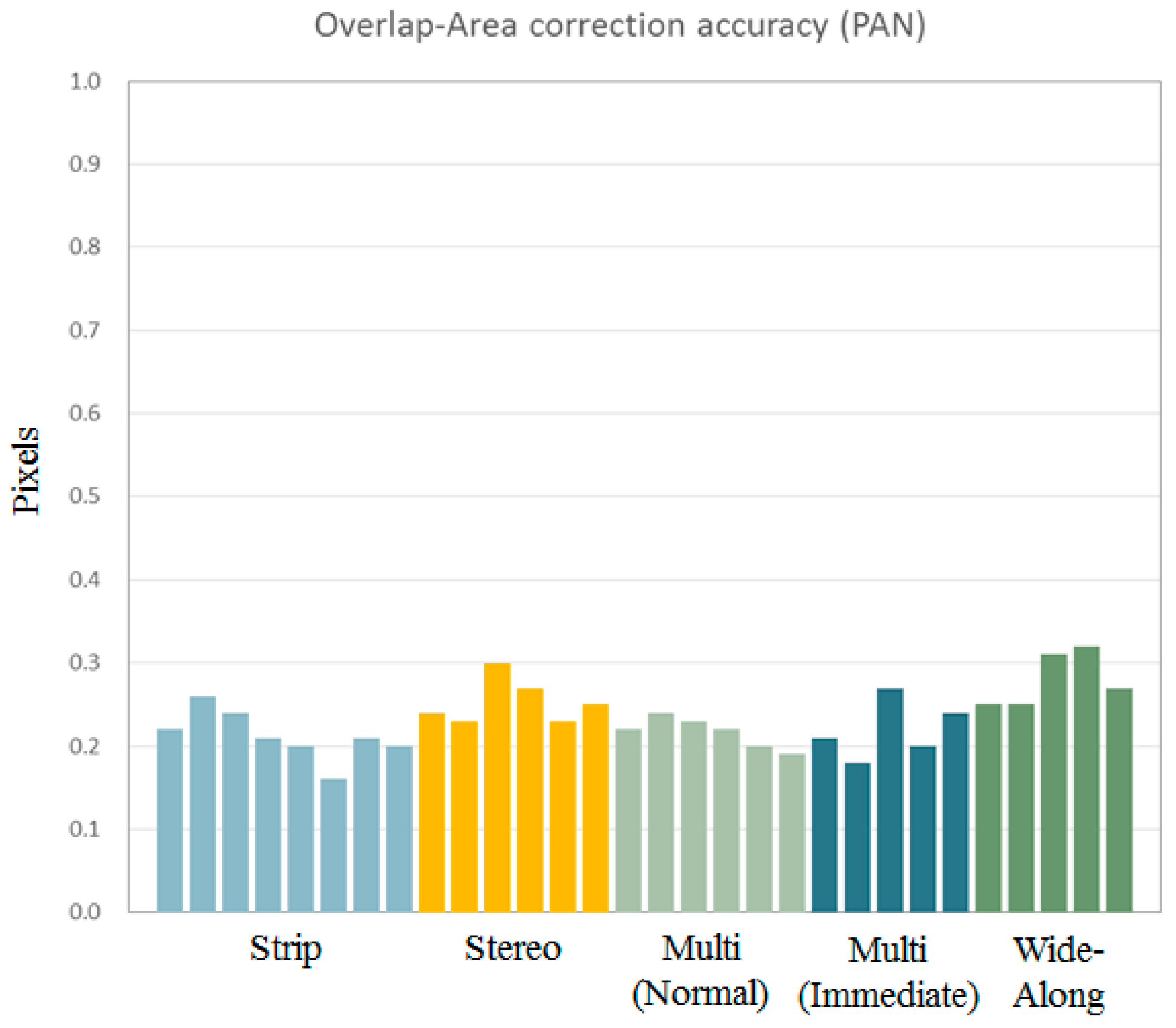
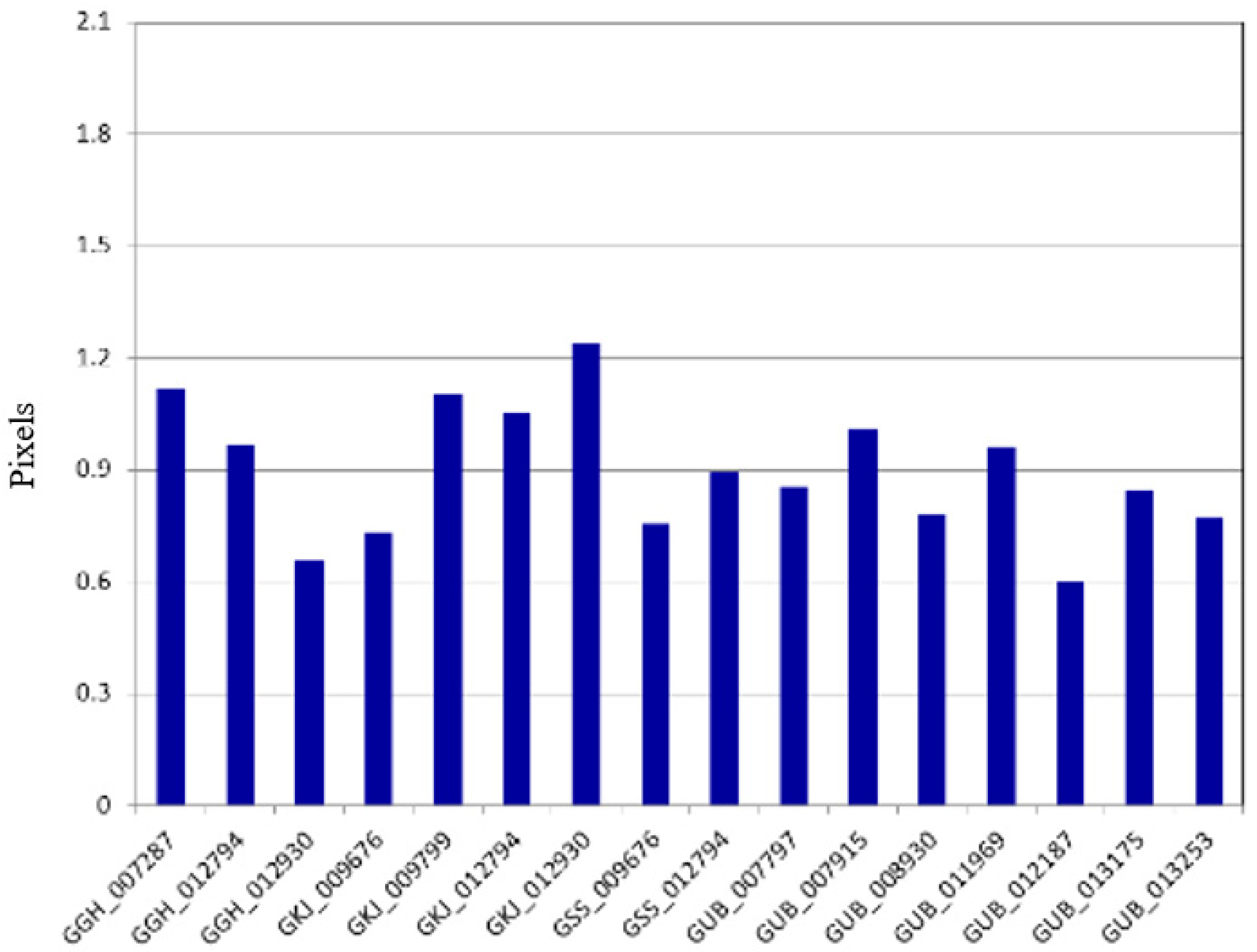
We tested the quality of the merging results to plot the estimated discrepancies for various acquisition modes of Kompsat-3, as presented in
Figure 10. The results showed that the discrepancy between the sub-images from the PAN sensors was estimated to 0.25 pixels (CE90). In addition, the merge quality is not affected by the acquisition modes.
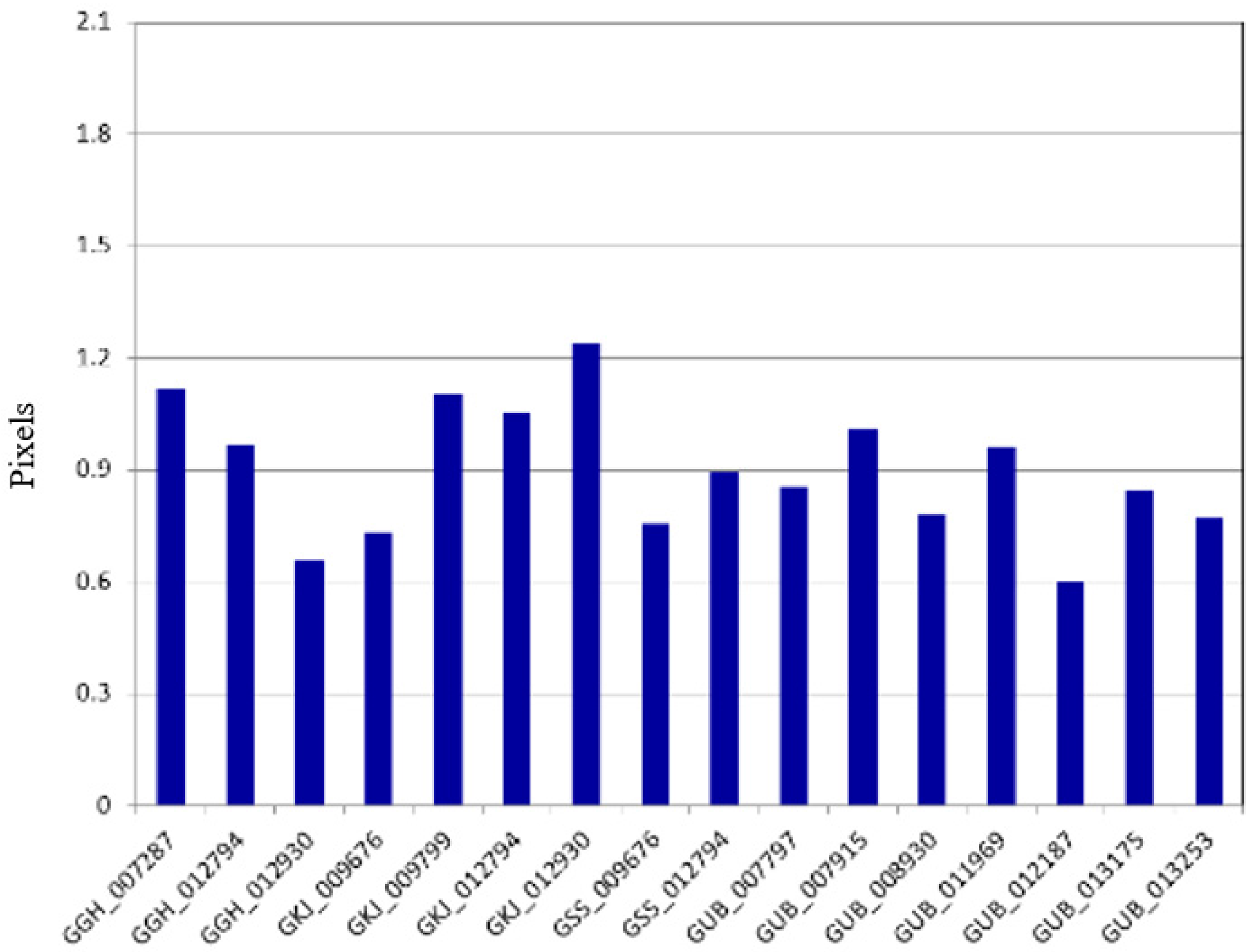
Following the subimage merge, we continue the band-to-band registration process. We utilized a total 30 image strips of various acquisition modes, such as 9 single strips, 6 stereos, 6 standard multi, 5 immediate multi, and 5 wide-along modes. In addition, we used SRTM (shuttle radar topography mission) V2 for the elevation information.
Table 4 shows that the accuracy of the registration between PAN and MS sensor is lower than a half pixel in RMSE.
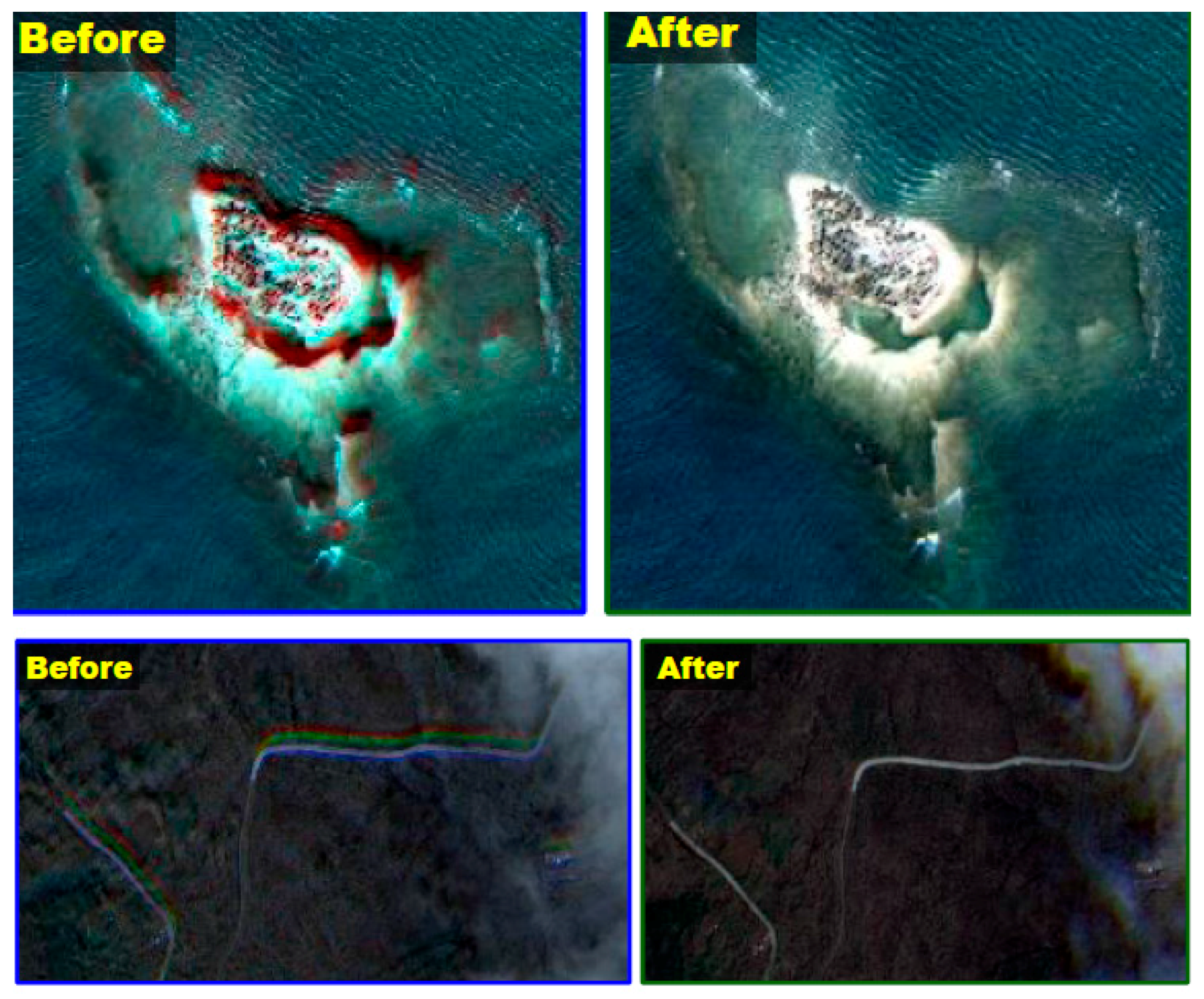
Figure 11 shows examples of the band-to-band registration showing the negligible saturation of multispectral colors after the process.
3.6. Validation of Positional Accuracy
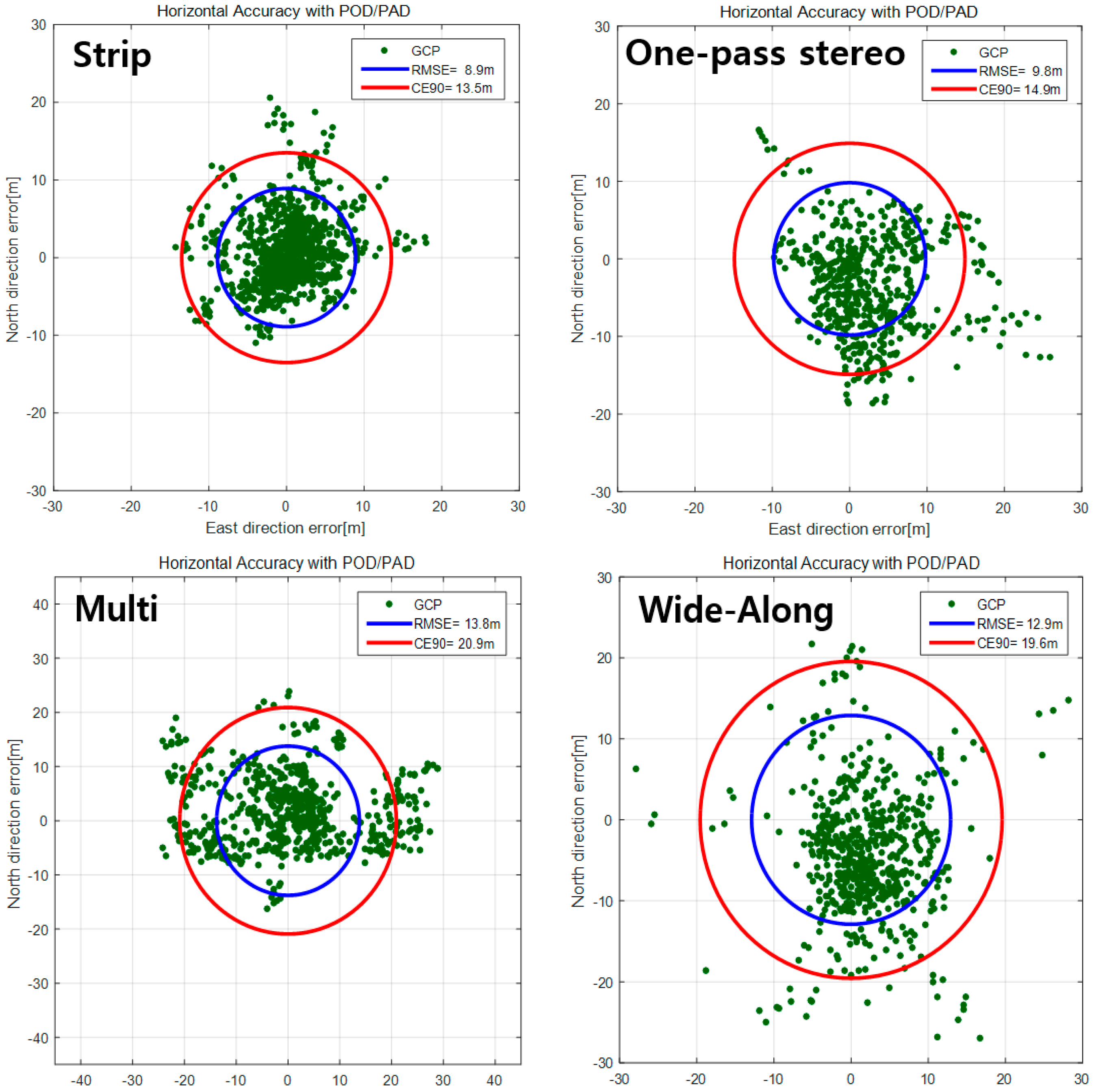
Completing the geometric calibration, we validated the positional accuracy. To this end we used 325 sets of test images across the world. The validation data were categorized for several acquisition modes which Kompsat-3A is capable of, as shown in
Table 5.
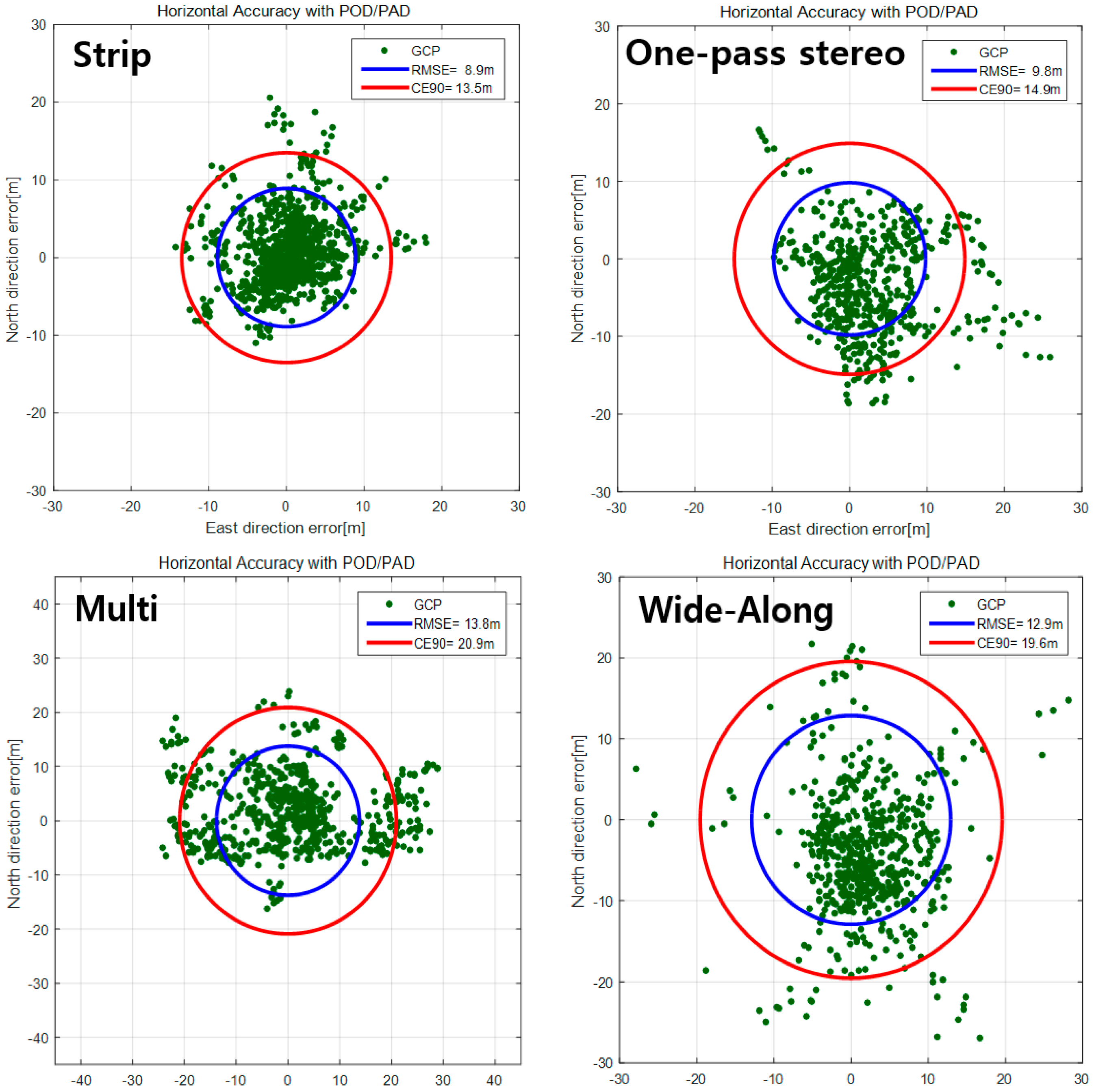
Figure 12 presents the horizontal accuracy for various image acquisition modes in RMSE and CE90. The strip mode showed the best accuracy among the acquisition modes with 8.9 m (RMSE) and 13.5 m (CE90). The one-pass stereo mode showed about 1 m larger error range than the strip mode. In the cases of multi (normal) and wide-along modes, the accuracy decreased to 13~14 m (RMSE) and 20~21 m (CE90).
Next, we validated the potential mapping accuracy using GCPs. A total of 16 image strips with −21.5°~+29.8° of roll angle range were used for the bundle adjustment. Note that these data were not used for the calibration. Each image was adjusted with 8~9 GCPs and 32~148 check points were used to validate the accuracy. The resultant errors were 0.91 (0.5 m) and 1.39 pixels (0.8 m) in RSME and CE90, respectively, as shown in
Figure 13.
4. Conclusions
We presented the geometric calibration and validation work of Kompsat-3A that was completed last year. A set of images over the test sites was taken for two months and was utilized for the work. The works include the AOCS absolute calibration, the calibration of the focal length and CCD alignments, the merge of CCD lines, the band-to-band registration, and, finally, by the validation of the positional accuracy.
The successful AOCS’ calibration increased the horizontal accuracy from 2.9 km (CE90) to 13.6 m and the CCD alignment calibration determined the non-regular and nonlinear CCD distortions, improving the accuracy from 12.5 m (CE90) to 8.0 m. Based on the calibration results, we could successfully merge the subimages from each CCD line with a negligible discrepancy of 0.25 pixels (CE90). Finally, we validated the positional accuracy with completion of the geometric calibrations. Without any GCP, the popularly used image acquisition mode, the strip mode, showed 13.5 m of horizontal accuracy, though other modes showed slightly lower accuracies. When GCPs were used for the bundle adjustment, we could obtain less than 1 m of horizontal accuracy in CE90.
Acknowledgments
This study was supported by the Korea Aerospace Research Institute (FR16720W02).
Author Contributions
Doocheon Seo and Jaehong Oh carried out the experiment and wrote this paper. Changno Lee participated in the experiment. Donghan Lee and Haejin Choi were responsible for the data acquisition. All authors reviewed the manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Christian, J.A.; Benhacine, L.; Hikes, J.; D’Souza, C. Geometric Calibration of the Orion Optical Navigation Camera using Star Field Images. J. Astronaut. Sci. 2016, 63, 335–353. [Google Scholar] [CrossRef]
- Jacobsen, K. High-Resolution Imaging Satellite Systems. In Proceedings of the 3D-Remote Sensing Workshop, Porto, Portugal, 6–11 June 2005.
- Kornus, W.; Lehner, M.; Schroeder, M. Geometric In-flight Calibration by Block Adjustment Using MOMS−2P Imagery of the Three Intersecting Stereo-strips. In Proceedings of the ISPRS joint workshop “Sensors and Mapping from Space 1999”, Hanover, Germany, 27–30 September 1999.
- Oberst, J.; Brinkmann, B.; Giese, B. Geometric Calibration of the MICAS CCD Sensor for the DS1 (Deep Space One) Spacecraft: Laboratory vs. In-Flight Data Analysis. In Proceedings of the International Archives of Photogrammetry and Remote Sensing, Amsterdam, The Netherlands, 16–22 July 2000.
- Schröder, S.; Maue, T.; Marquès, P.; Mottola, S.; Aye, K.; Sierks, H.; Keller, H. In-Flight Calibration of the Dawn Framing Camera. ICARUS 2013, 226, 1304–1317. [Google Scholar] [CrossRef]
- Toutin, T.; Blondel, E.; Rother, K.; Mietke, S. In-flight Calibration of SPOT5 and Formosat−2. In Proceedings of the ISPRS Commission I Symposium on From Sensors to Imagery, Paris, France, 4–6 May 2006.
- Kubik, P.; Lebegue, L.; Fourest, S.; Delvit, J.M.; de Lussy, F.; Greslou, D.; Blanchet, G. First In-flight Results of Pleiades 1A Innovative Methods for Optical Calibration. In Proceedings of the International Conference on Space Optical Systems and Applications, Ajaccio, France, 9–12 October 2012; pp. 1–9.
- Chen, Y.; Xie, Z.; Qui, Z.; Zhang, Q.; Hu, Z. Calibration and validation of ZY−3 optical sensors. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4616–4626. [Google Scholar] [CrossRef]
- Seo, D.C.; Hong, G.B.; Jin, C.G. Kompsat-3A Direct Georeferencing Mode and Geometric Calibration/validation. In Proceedings of the Asian Conference on Remote Sensing, Quezon City, Philippines, 19–23 October 2015.
- Seo, D.C.; Lee, C.N.; Oh, J.H. Merge of sub-images from two PAN CCD lines of Kompsat-3 AEISS. KSCE J. Civ. Eng. 2016, 20, 863–872. [Google Scholar] [CrossRef]
- Mulawa, D. On-orbit Geometric Calibration of the Orbview−3 High Resolution Imaging Satellite. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 35, 1–6. [Google Scholar]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}