
A Novel 3D Multilateration Sensor Using Distributed Ultrasonic Beacons for Indoor Navigation


 ,
, 
Abstract
:1. Introduction
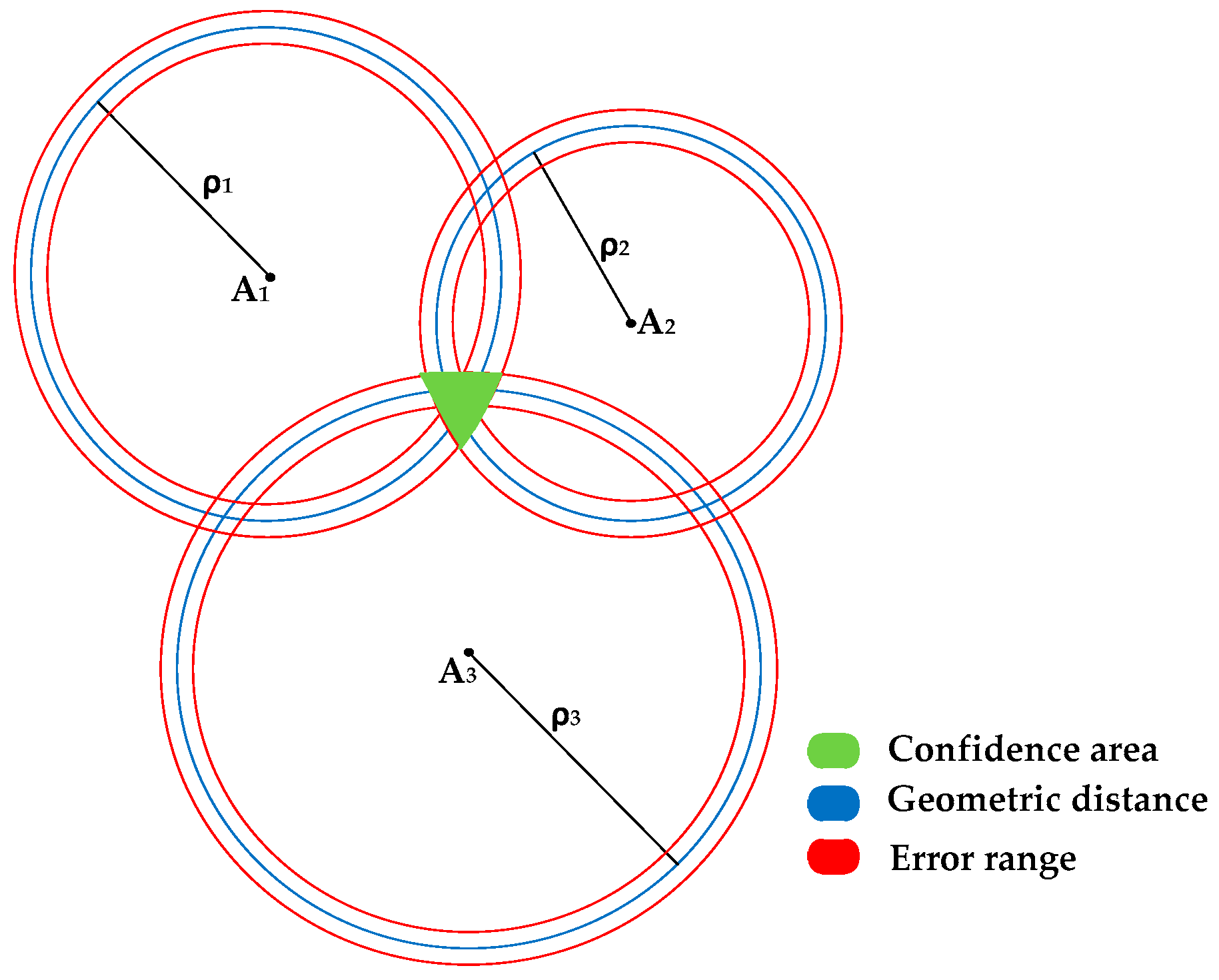
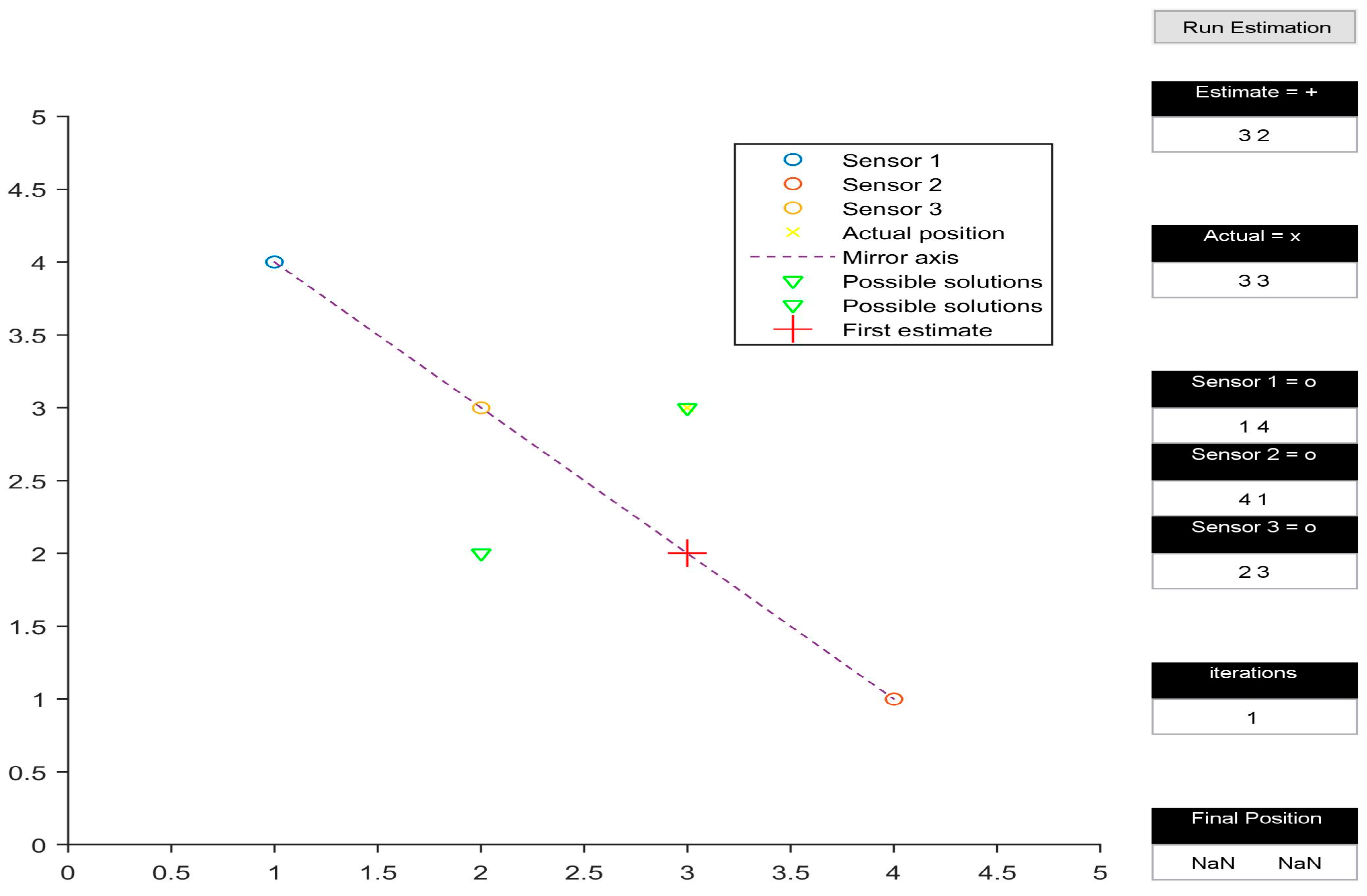
2. Multilateration Principles
- = geometric distance;
- = propagation delay in air (standard conditions);
- = receiver clock error;
- = transmitter clock error;
- = multipath error;
- = random measurement noise.
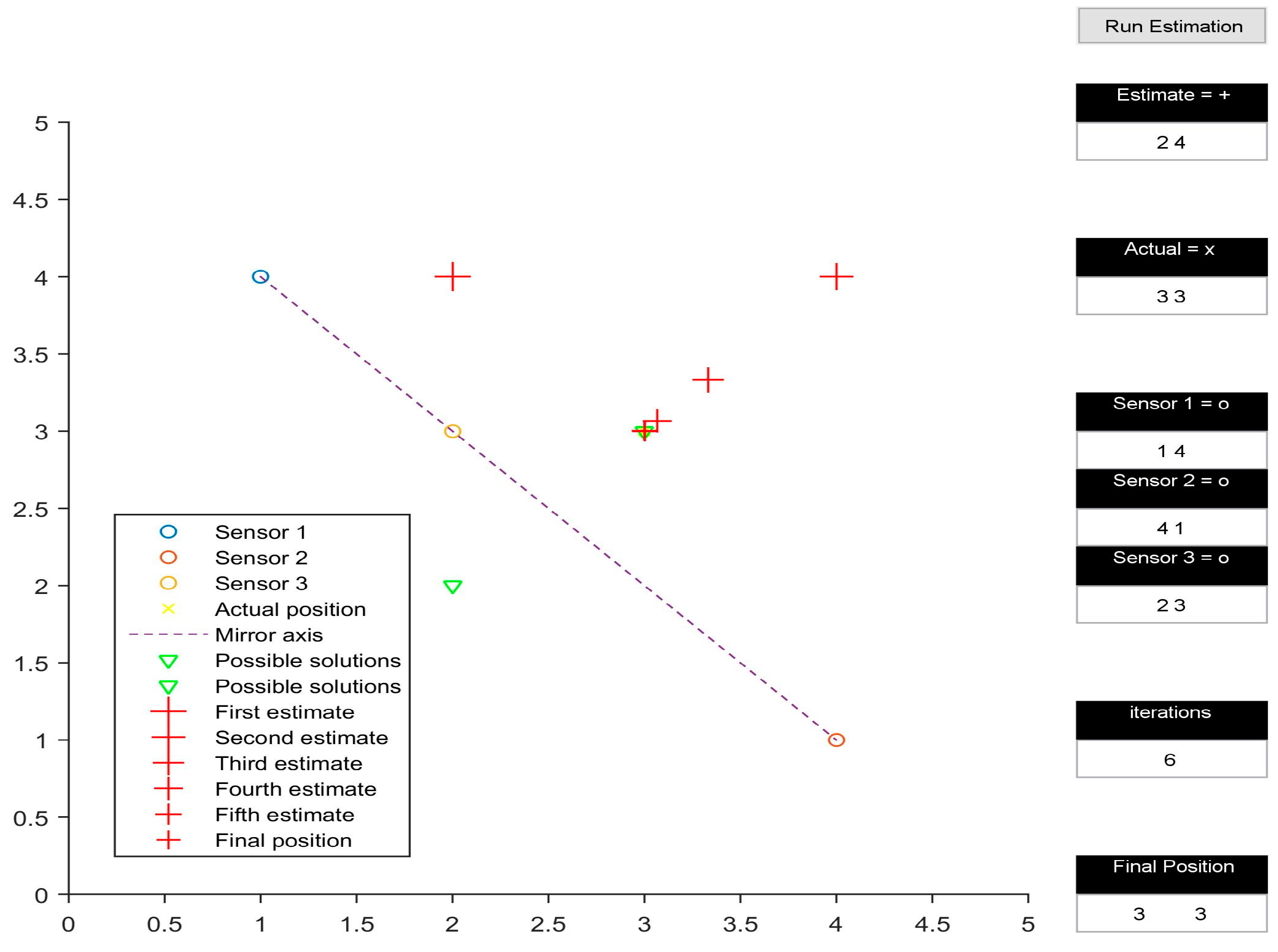
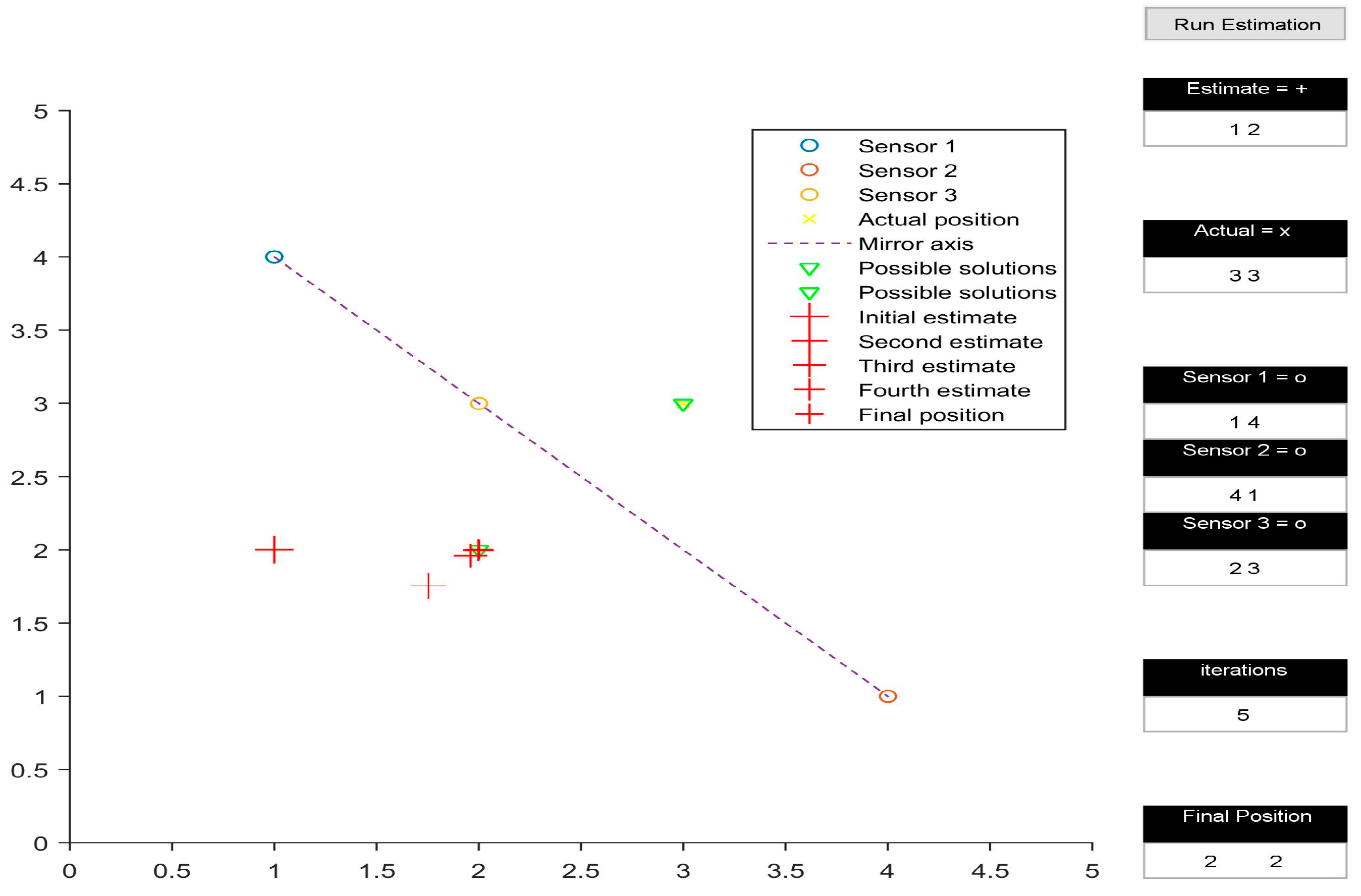
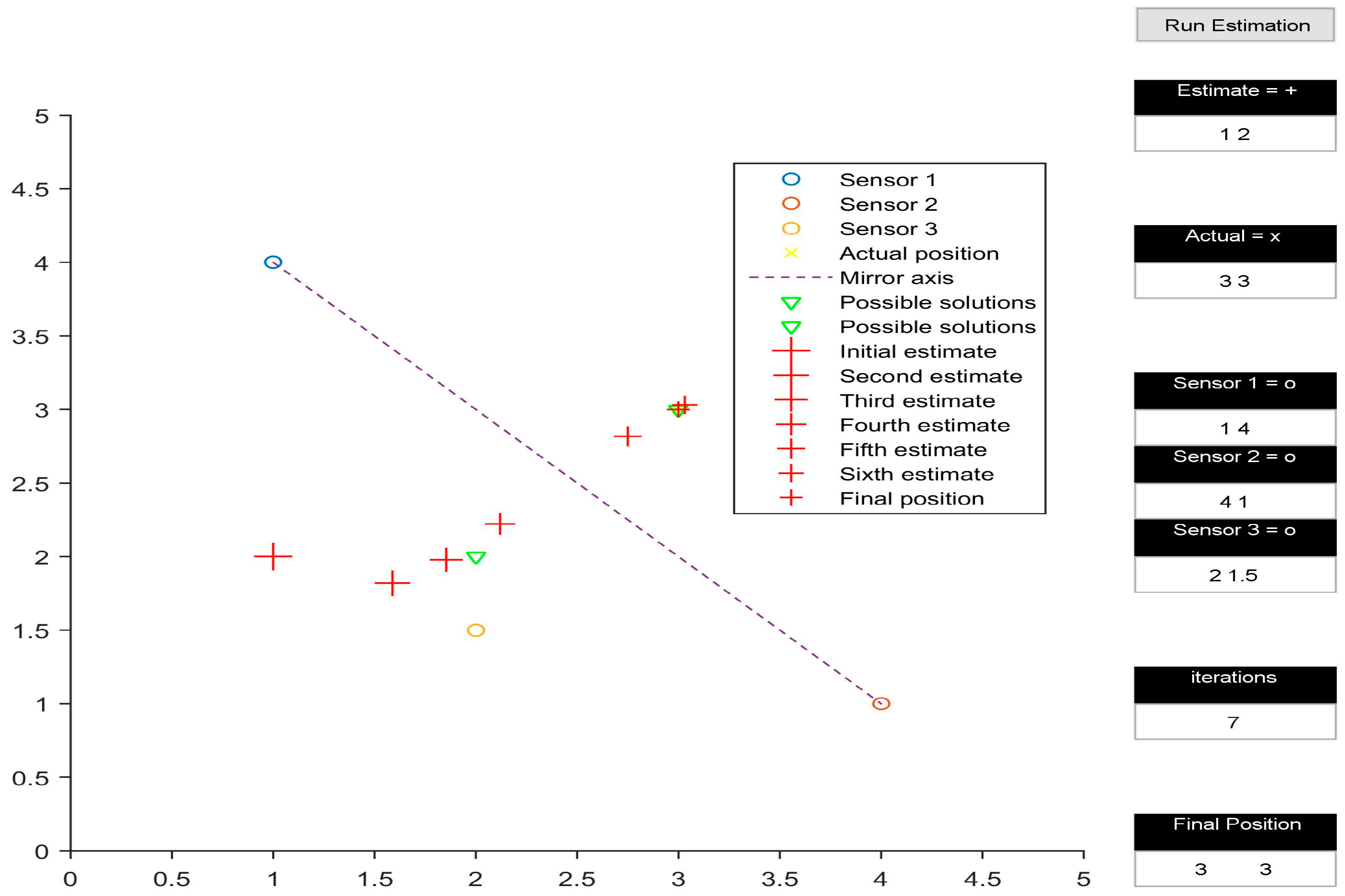
Multilateration Algorithm
3. Numerical Simulation
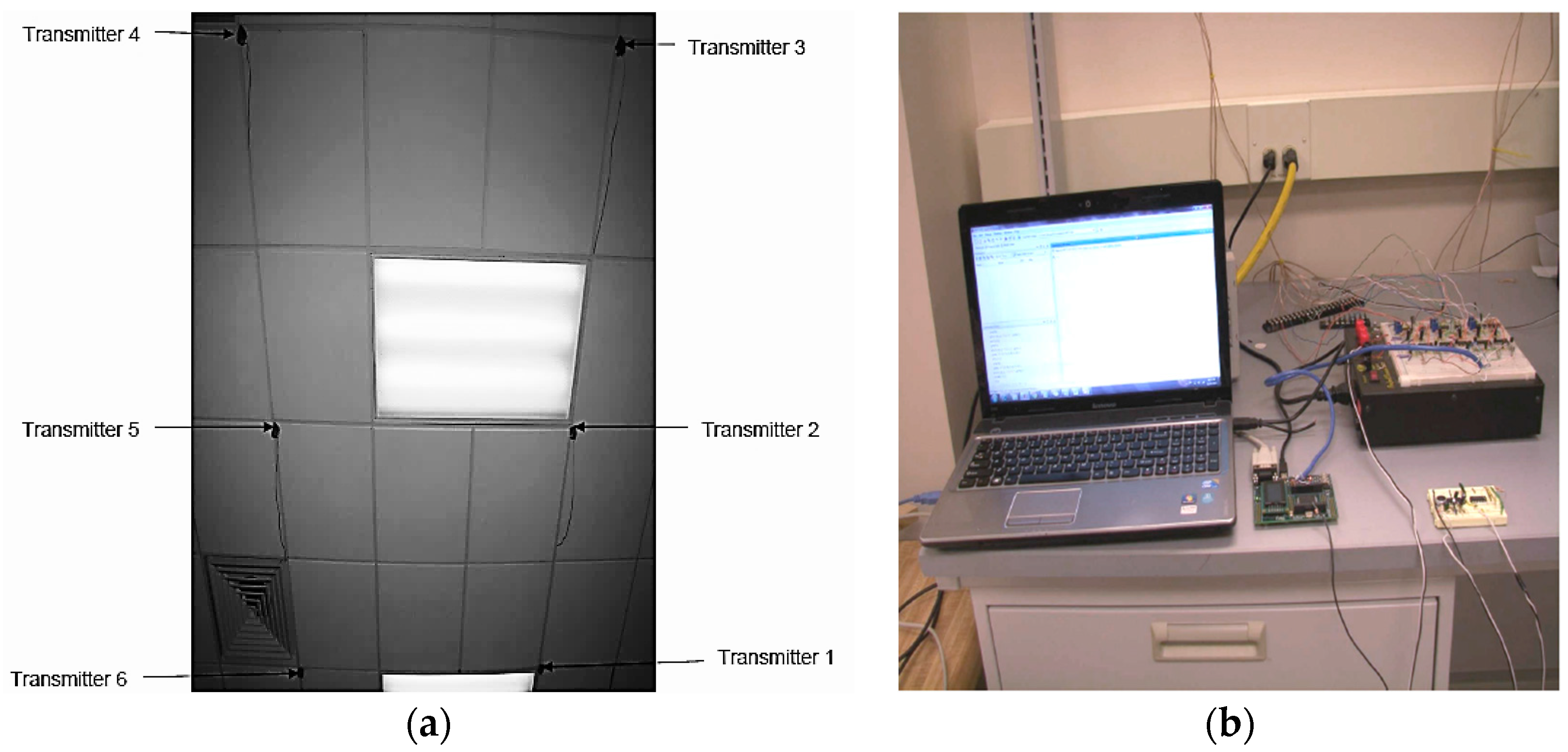
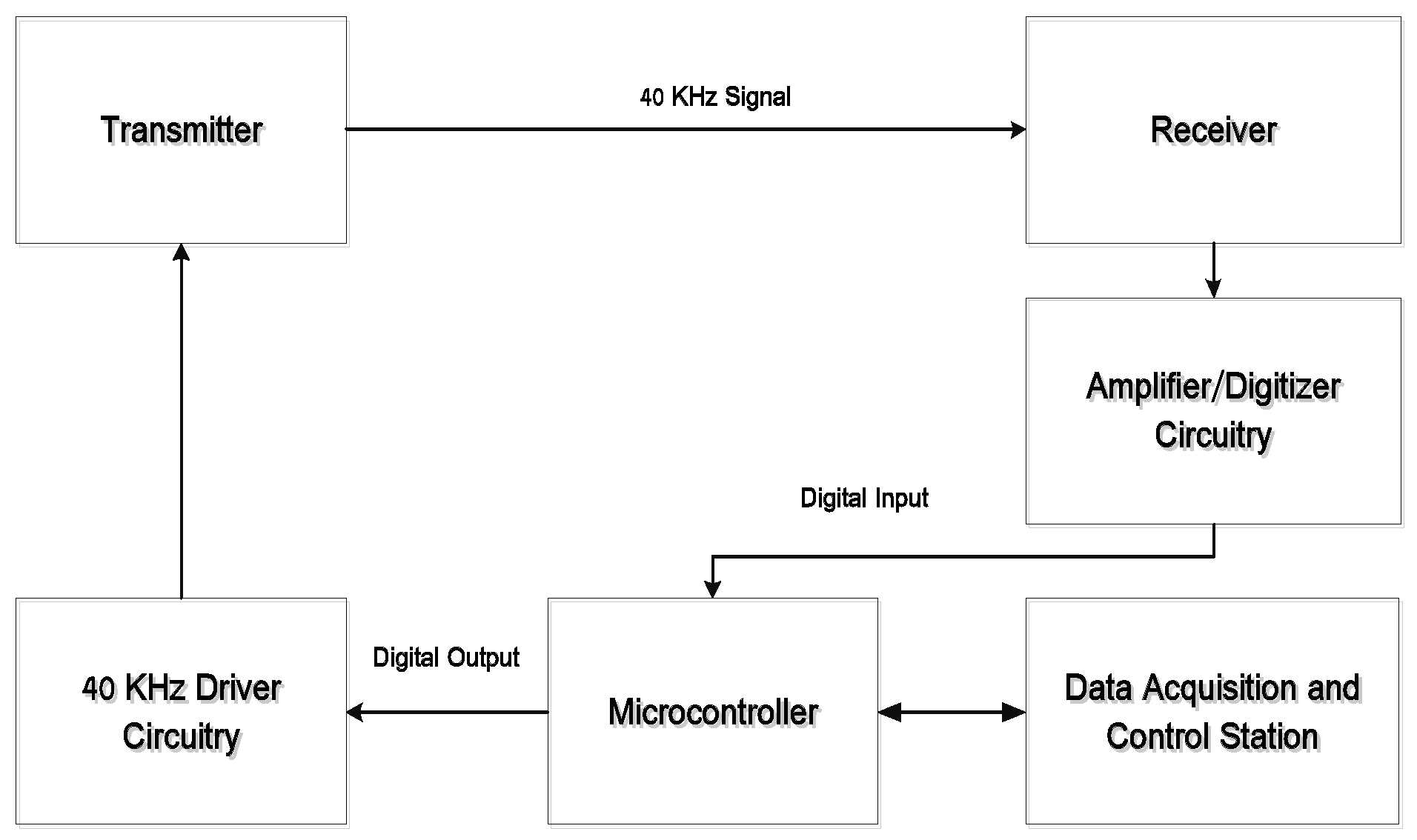
4. Experimental Verification
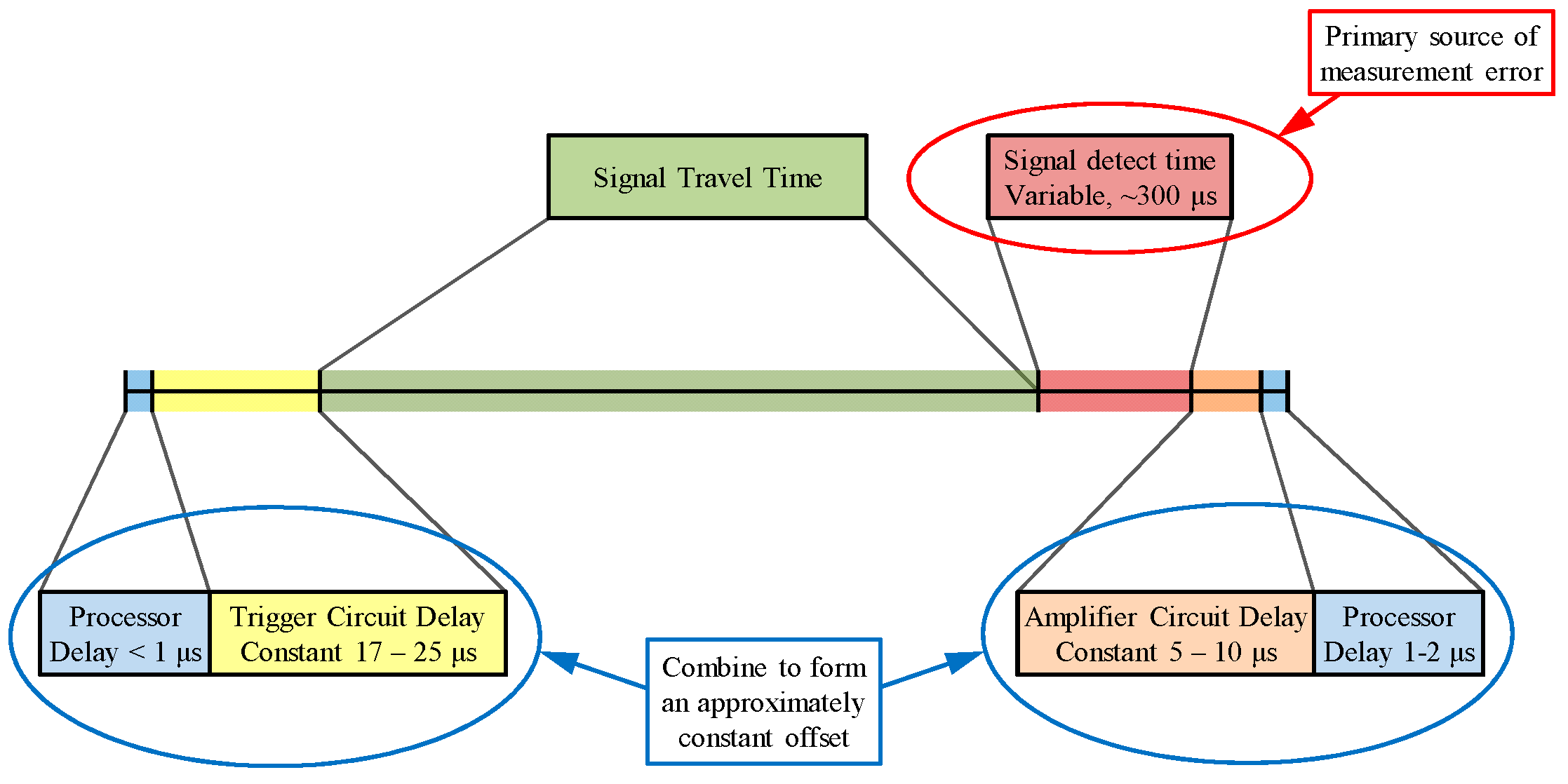
4.1. Sources of Error
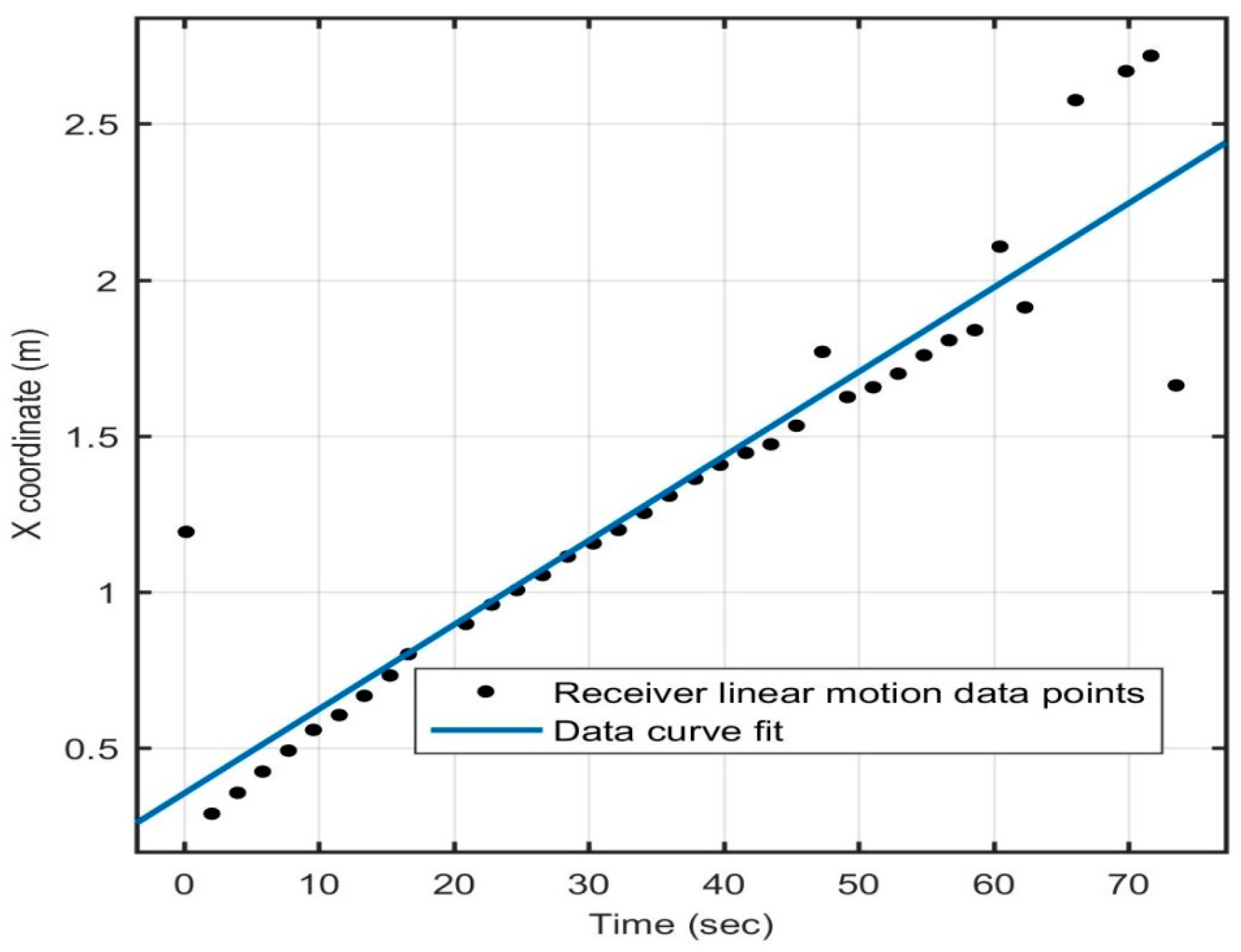
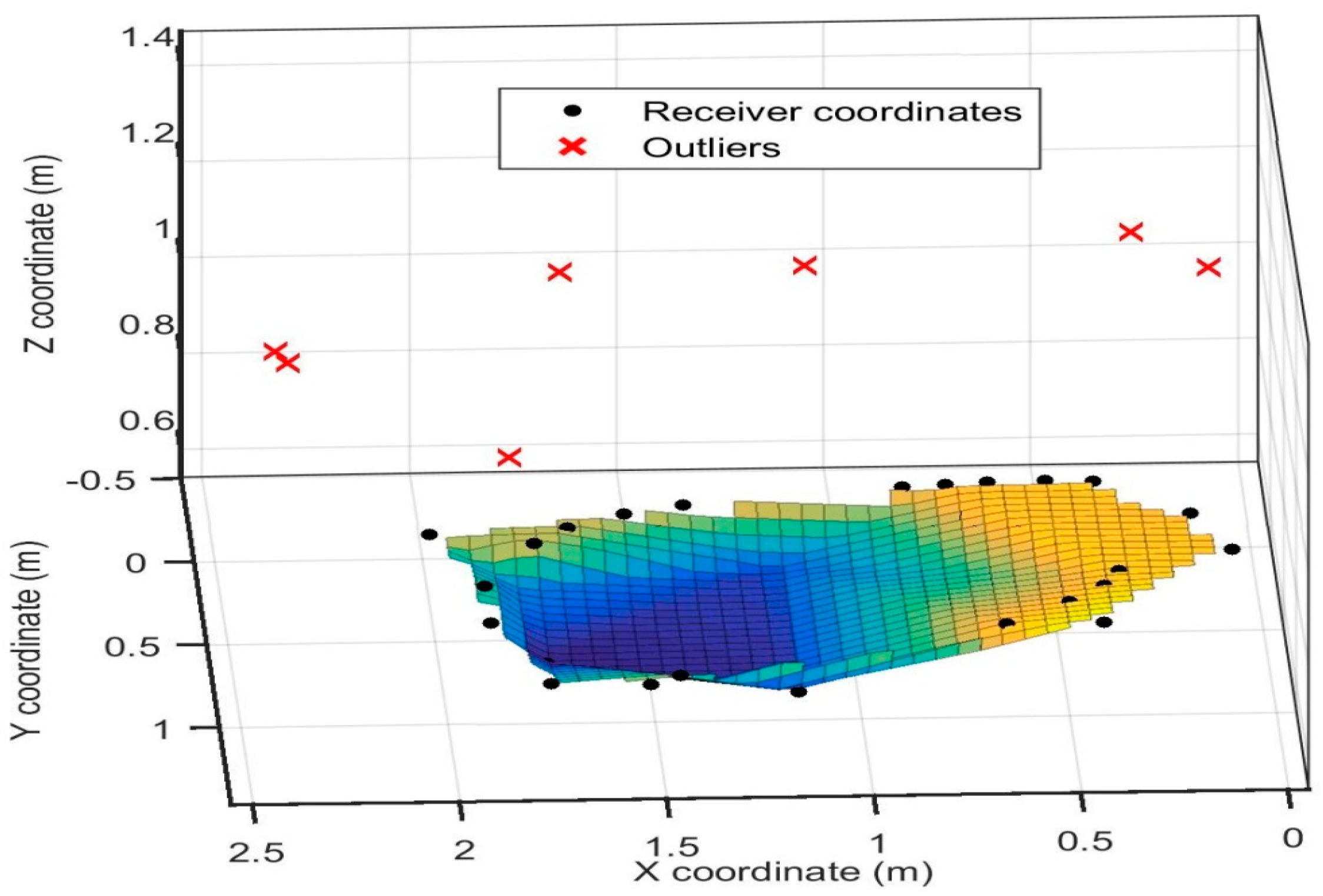
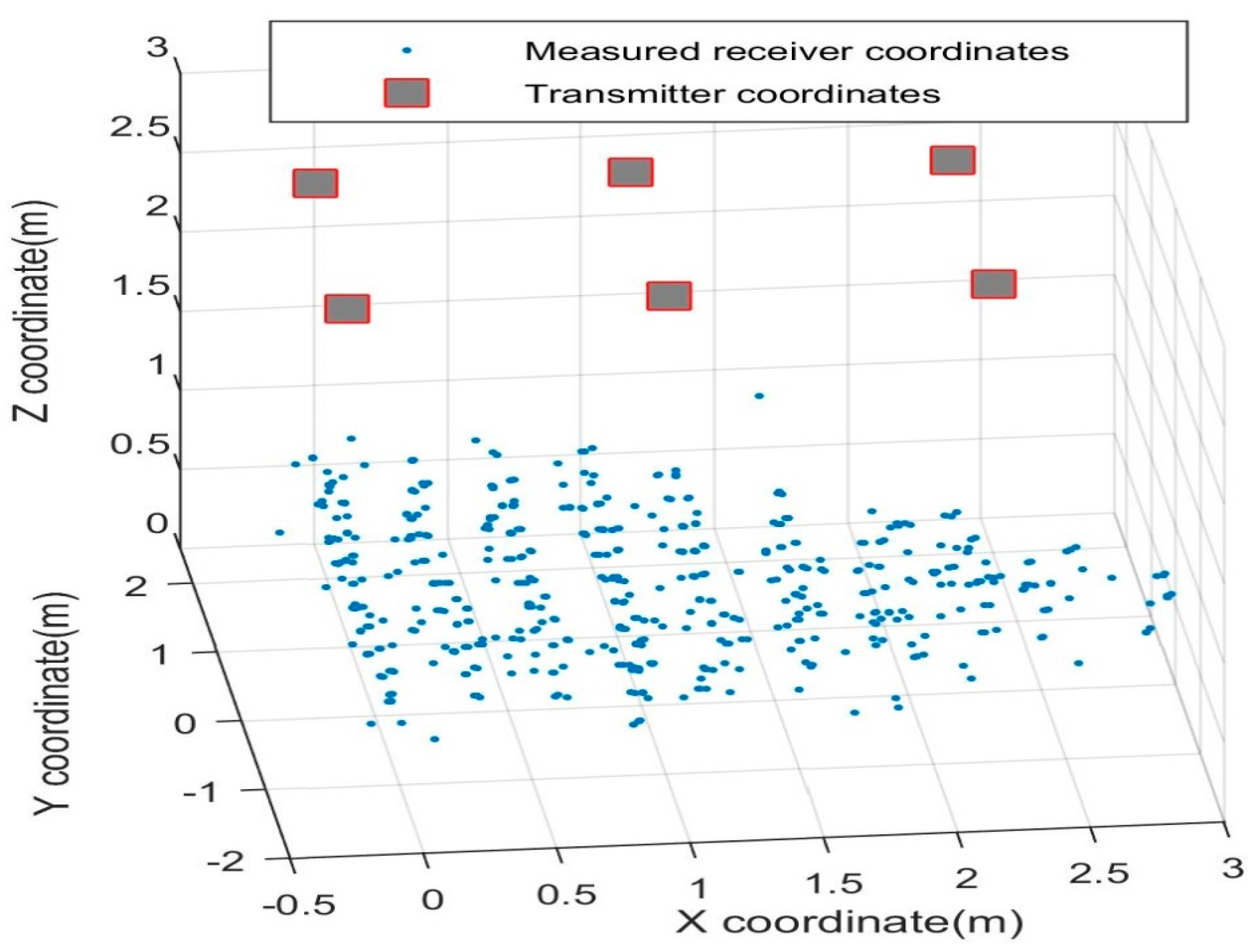
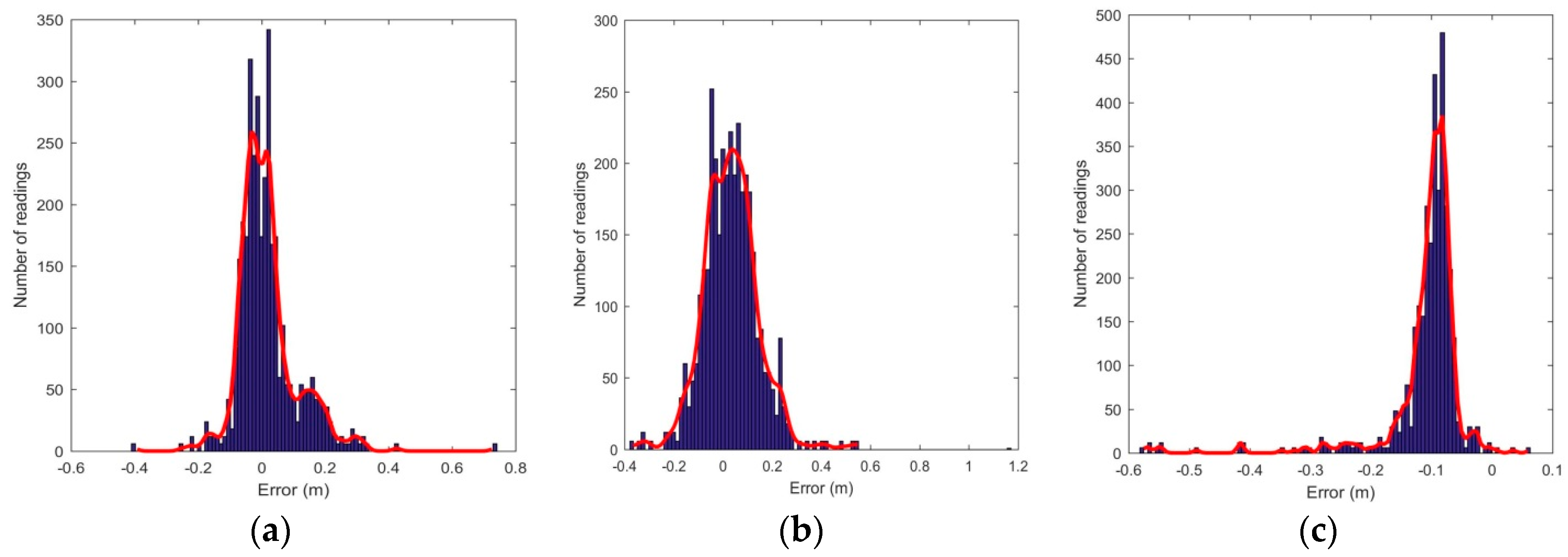
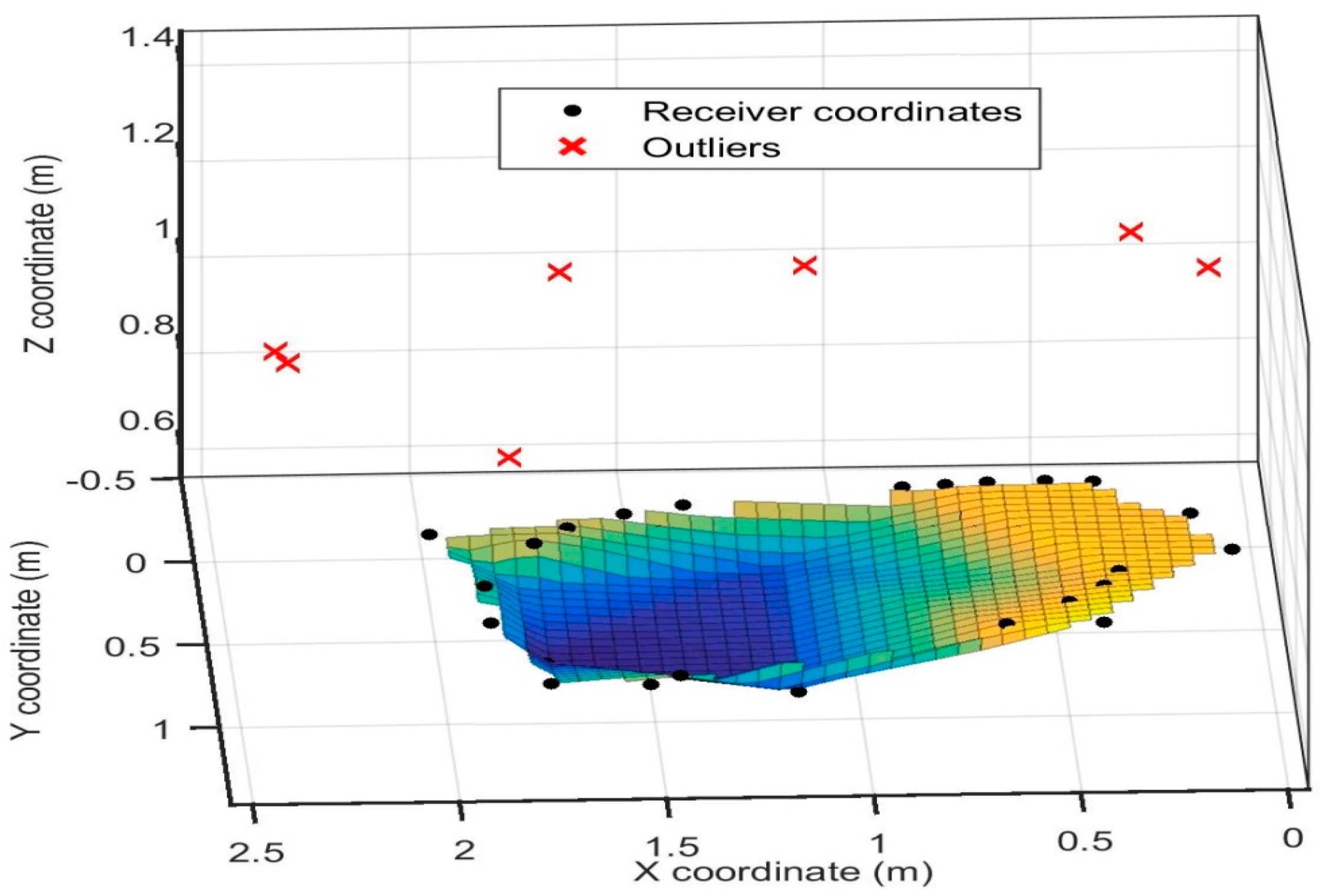
4.2. Results
5. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sabatini, R.; Moore, T.; Hill, C. Avionics based GNSS Integrity Augmentation for Unmanned Aerial Systems Sense-and-Avoid. In Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation: ION GNSS+ 2014, Tampa, FL, USA, 8–12 September 2014.
- Sabatini, R.; Moore, T.; Hill, C. A New Avionics-Based GNSS Integrity Augmentation System: Part 1—Fundamentals. J. Navig. 2013, 66, 363–384. [Google Scholar] [CrossRef]
- Sabatini, R.; Moore, T.; Hill, C. A New Avionics Based GNSS Integrity Augmentation System: Part 2—Integrity Flags. J. Navig. 2013, 66, 511–552. [Google Scholar] [CrossRef]
- Fisher, K.A. The Navigation Potential of Signals of Opportunity-Based Time Difference of Arrival Measurements. Ph.D. Thesis, Air Force Institute of Technology, Wright-Patterson AFB, OH, USA, 2005. [Google Scholar]
- Sabatini, R.; Bartel, C.; Kaharkar, A.; Shaid, T.; Ramasamy, S. Navigation and guidance system architectures for small unmanned aircraft applications. Int. J. Mech. Ind. Sci. Eng. 2014, 8, 733–752. [Google Scholar]
- Manolakis, D.E. Efficient solution and performance analysis of 3-D position estimation by trilateration. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 1239–1248. [Google Scholar] [CrossRef]
- Ward, A.; Jones, A.; Hopper, A. A new location technique for the active office. IEEE Pers. Commun. 1997, 4, 42–47. [Google Scholar] [CrossRef]
- Priyantha, N.B.; Miu, A.K.L.; Balakrishnan, H. The Cricket Location-Support System. In Proceedings of the 6th Annual International Conference on Mobile Computing and Networking (MobiCom 2000), Boston, MA, USA, 2000; pp. 32–43.
- Hazas, M.; Hopper, A. Broadband Ultrasonic Location Systems for Improved Indoor Positioning. IEEE Trans. Mob. Comput. 2006, 5, 536–547. [Google Scholar] [CrossRef]
- Navarro-Serment, L.E.; Paredis, C.J.J.; Khosla, P.K. A Beacon System for the Localization of Distributed Robotic Teams. In Proceedings of the International Conference on Field and Service Robotics, Pittsburgh, PA, USA, 29–31 August 1999; pp. 232–237.
- Filonenko, V.; Cullen, C.; Carswell, J.D. Asynchronous Ultrasonic Trilateration for Indoor Positioning of Mobile Phones. In Proceedings of the Web and Wireless Geographical Information Systems, Naples, Italy, 12–13 April 2012; pp. 33–46.
- Lee, W.; Hur, K.; Hwang, K.; Eom, D.-S.; Kim, J.-O. Mobile Robot Navigation Using Wireless Sensor Networks without Localization Procedure. Wirel. Pers. Commun. 2012, 62, 257–275. [Google Scholar] [CrossRef]
- Sanchez, A.; Elvira, S.; de Castro, A.; Glez-de-Rivera, G.; Ribalda, R.; Garrido, J. Low Cost Indoor Ultrasonic Positioning Implemented in FPGA. In Proceedings of the Industrial Electronics Conference (IECON 2009), Porto, Portugal, 3–5 November 2009.
- Martin, R.K.; Velotta, J.S.; Raquet, J.F. Bandwidth Efficient Cooperative TDOA Computation for Multicarrier Signals of Opportunity. IEEE Trans. Signal Process. 2009, 57, 2311–2322. [Google Scholar] [CrossRef]
- Nishida, Y.; Aizawa, H.; Hori, T.; Hoffman, N.H.; Kanade, T.; Kakikura, M. 3D Ultrasonic Tagging System for Observing Human Activity. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2003), Las Vegas, NV, USA, 27–31 October 2003; pp. 785–791.
- Roa, J.O.; Jiménez, A.R.; Seco, F.; Prieto, J.C.; Ealo, J. Optimal Placement of Sensors for Trilateration: Regular Lattices vs. Meta-Heuristic Solutions; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2007; Volume 4739, pp. 780–787. [Google Scholar]
- Norrdine, A. An algebraic Solution to the Multilateration Problem. In Proceedings of the 15th International Conference on Indoor Positioning and Indoor Navigation, Sydney, Australia, 13–15 November 2012.
- Murphy, W.S., Jr. Determination of a Position Using Approximate distances and Trilateration. Master’s Thesis, Colorado School of Mines, Golden, CO, USA, July 2007. [Google Scholar]
- Sabatini, R.; Palmerini, G.B. Differential Global Positioning System (DGPS) for Flight Testing; AGARD AG-160, Volume 21; NATO Science and Technology Organization: Neuily-sur-Seine, France, 2008. [Google Scholar]
- Jia, Z.; Wu, C.; Li, Z.; Zhang, Y.; Guan, B. The Indoor Localization and Tracking Estimation Method of Mobile Targets in Three-Dimensional Wireless Sensor Networks. Sensors 2015, 15, 29661–29684. [Google Scholar] [CrossRef] [PubMed]
- Medina, C.; Segura, J.C.; de la Torre, A. Ultrasound Indoor Positioning System Based on a Low-Power Wireless Sensor Network Providing Sub-Centimeter Accuracy. Sensors 2013, 13, 3501–3526. [Google Scholar] [CrossRef] [PubMed]
- Dean, A.G. Teaching Optimization of Time and Energy in Embedded Systems. In Proceedings of the 2010 Workshop on Embedded Systems Education, Scottsdale, AZ, USA, 28 October 2010.
- Matsushita Electronic Company. Ultrasonic Ceramic Microphone Data Sheet. Available online: http://www.jameco.com/Jameco/Products/ProdDS/2120268.pdf (accessed on 3 September 2011).
- Sabatini, R.; Rodríguez, L.; Kaharkar, A.; Bartel, C.; Shaid, T.; Zammit-Mangion, D. Low-Cost Navigation and Guidance Systems for Unmanned Aerial Vehicles—Part 2: Attitude Determination and Control. Ann. Navig. 2013, 20, 97–126. [Google Scholar] [CrossRef]
- Sabatini, R.; Rodríguez, L.; Kaharkar, A.; Bartel, C.; Shaid, T. Carrier-phase GNSS attitude determination and control system for unmanned aerial vehicle applications. ARPN J. Syst. Softw. 2012, 2, 297–322. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
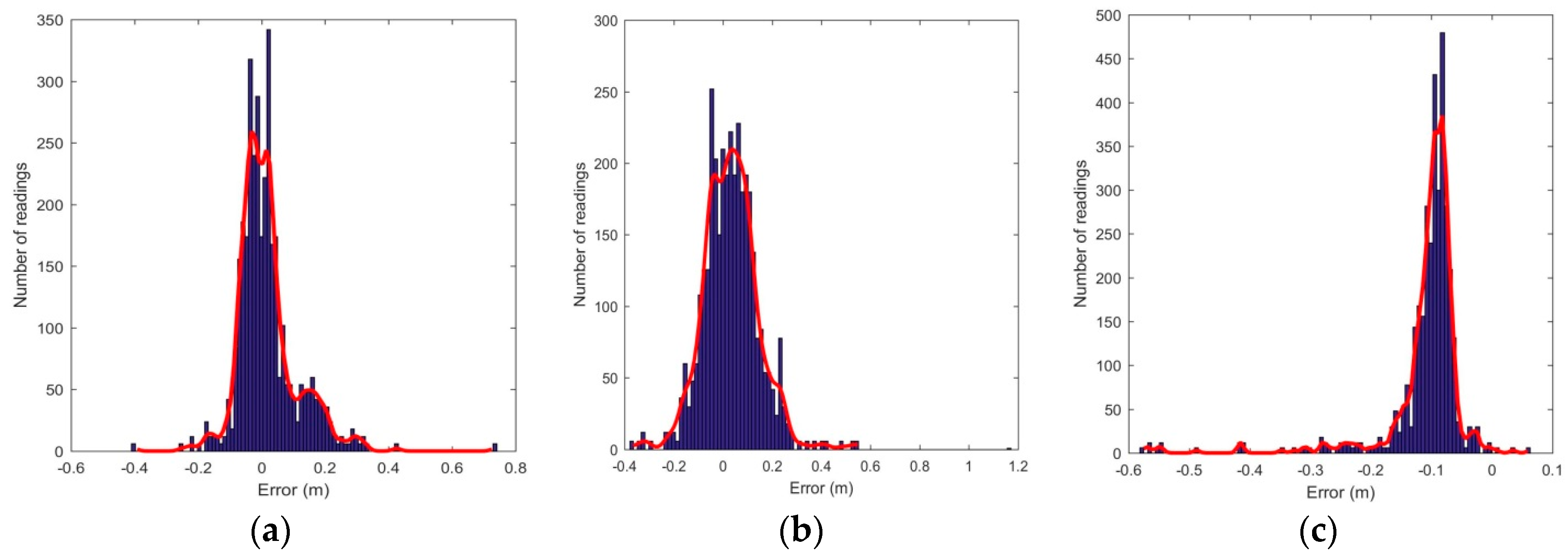
| Coordinates | Mean (cm) | Standard Deviation (cm) |
|---|---|---|
| X | 1.83 | 9.45 |
| Y | 3.35 | 11.28 |
| Z | −10.97 | 7.01 |
| Mean (cm) | Standard Deviation (cm) |
|---|---|
| 17.51 | 16.30 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kapoor, R.; Ramasamy, S.; Gardi, A.; Bieber, C.; Silverberg, L.; Sabatini, R. A Novel 3D Multilateration Sensor Using Distributed Ultrasonic Beacons for Indoor Navigation. Sensors 2016, 16, 1637. https://doi.org/10.3390/s16101637
Kapoor R, Ramasamy S, Gardi A, Bieber C, Silverberg L, Sabatini R. A Novel 3D Multilateration Sensor Using Distributed Ultrasonic Beacons for Indoor Navigation. Sensors. 2016; 16(10):1637. https://doi.org/10.3390/s16101637
Chicago/Turabian StyleKapoor, Rohan, Subramanian Ramasamy, Alessandro Gardi, Chad Bieber, Larry Silverberg, and Roberto Sabatini. 2016. "A Novel 3D Multilateration Sensor Using Distributed Ultrasonic Beacons for Indoor Navigation" Sensors 16, no. 10: 1637. https://doi.org/10.3390/s16101637
APA StyleKapoor, R., Ramasamy, S., Gardi, A., Bieber, C., Silverberg, L., & Sabatini, R. (2016). A Novel 3D Multilateration Sensor Using Distributed Ultrasonic Beacons for Indoor Navigation. Sensors, 16(10), 1637. https://doi.org/10.3390/s16101637