
An Adaptive Low-Cost GNSS/MEMS-IMU Tightly-Coupled Integration System with Aiding Measurement in a GNSS Signal-Challenged Environment

Abstract
:1. Introduction
- We present a novel adaptive method to tune the Kalman filter measurement noise covariance matrix® in real time online and mitigate the effect of GNSS measurement errors caused by the changing of visible satellites. The proposed method has the advantage that the tuning process is dependent on only measurements and is totally decoupled from estimated state vectors.
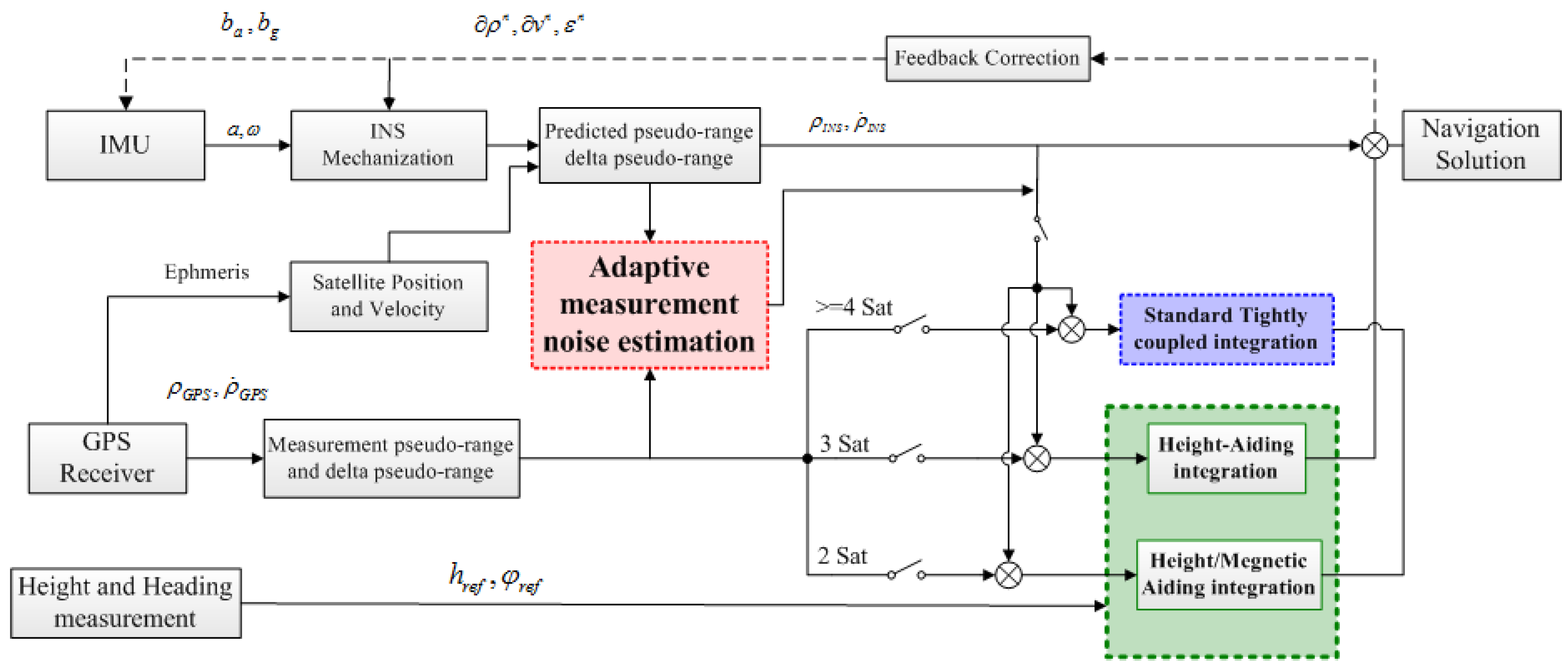
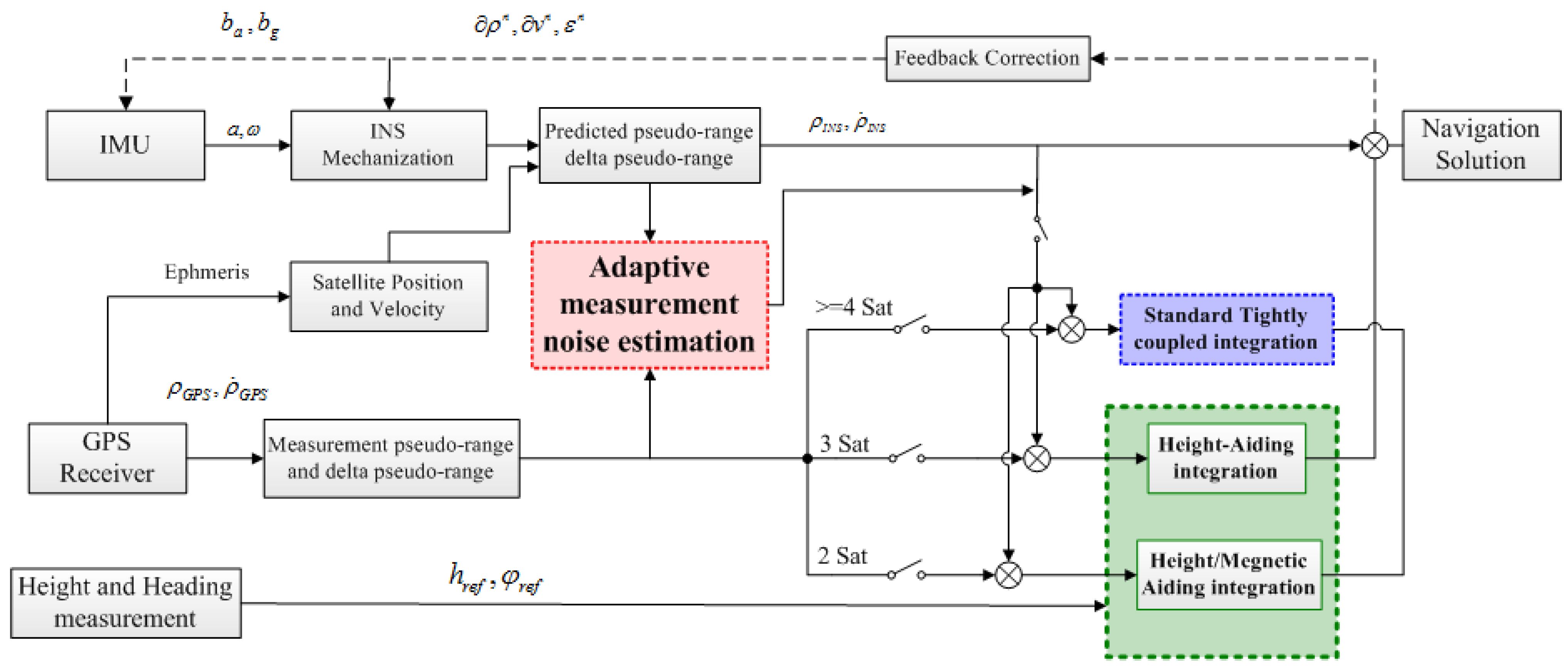
- This research suggests using information from external sensors to enhance the navigation performance, and the whole system works under a filter switching strategy. This means that when at least four satellites are visible, the system works in standard tightly-coupled mode without employing the external measurements in order to improve the computational efficiency; when three satellites are visible and the barometer data are available, the system switches to the height aiding filter; and when two satellites are available and the magnetometer and height information are also available, the system changes to the height/heading aiding integration filter.
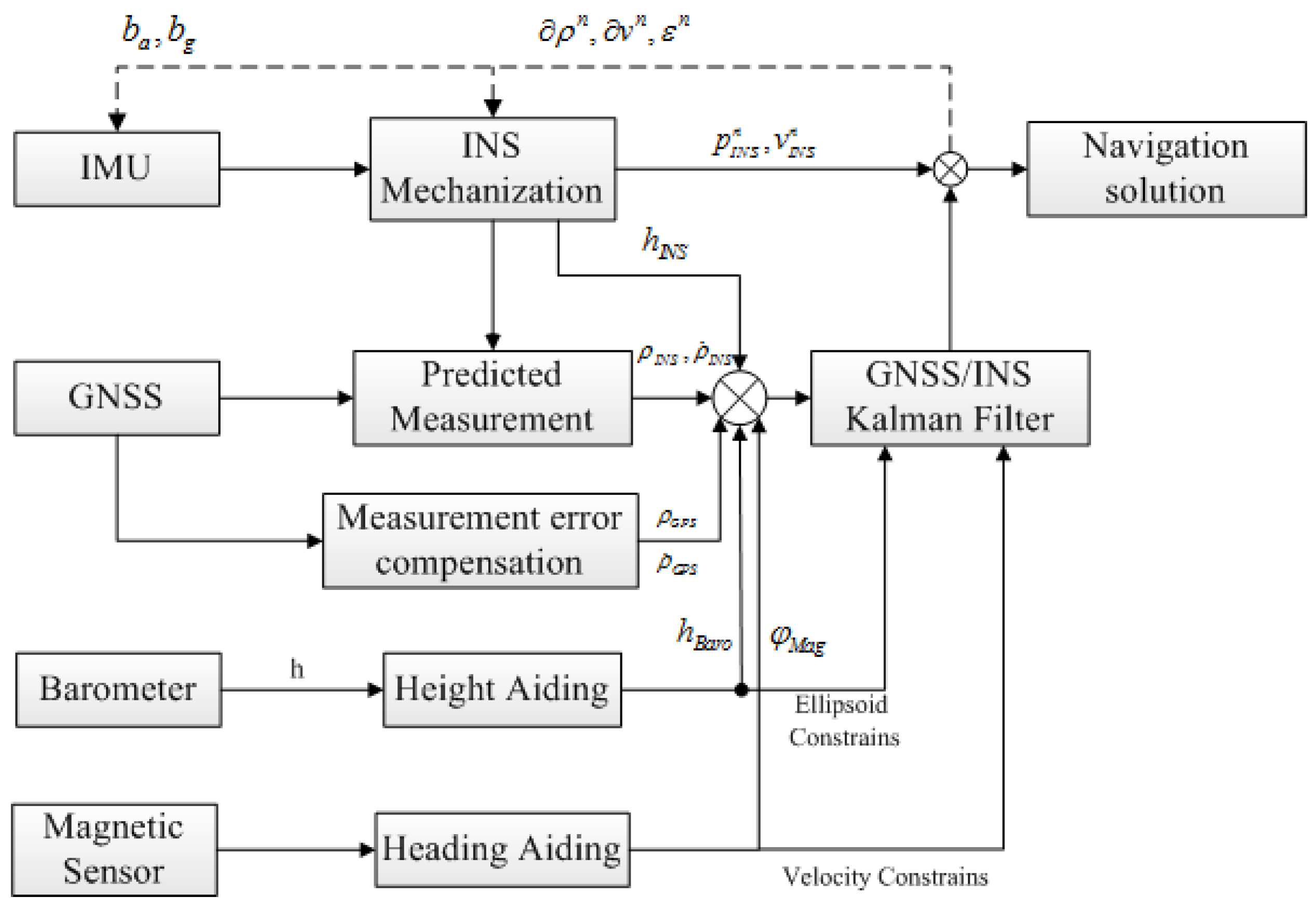
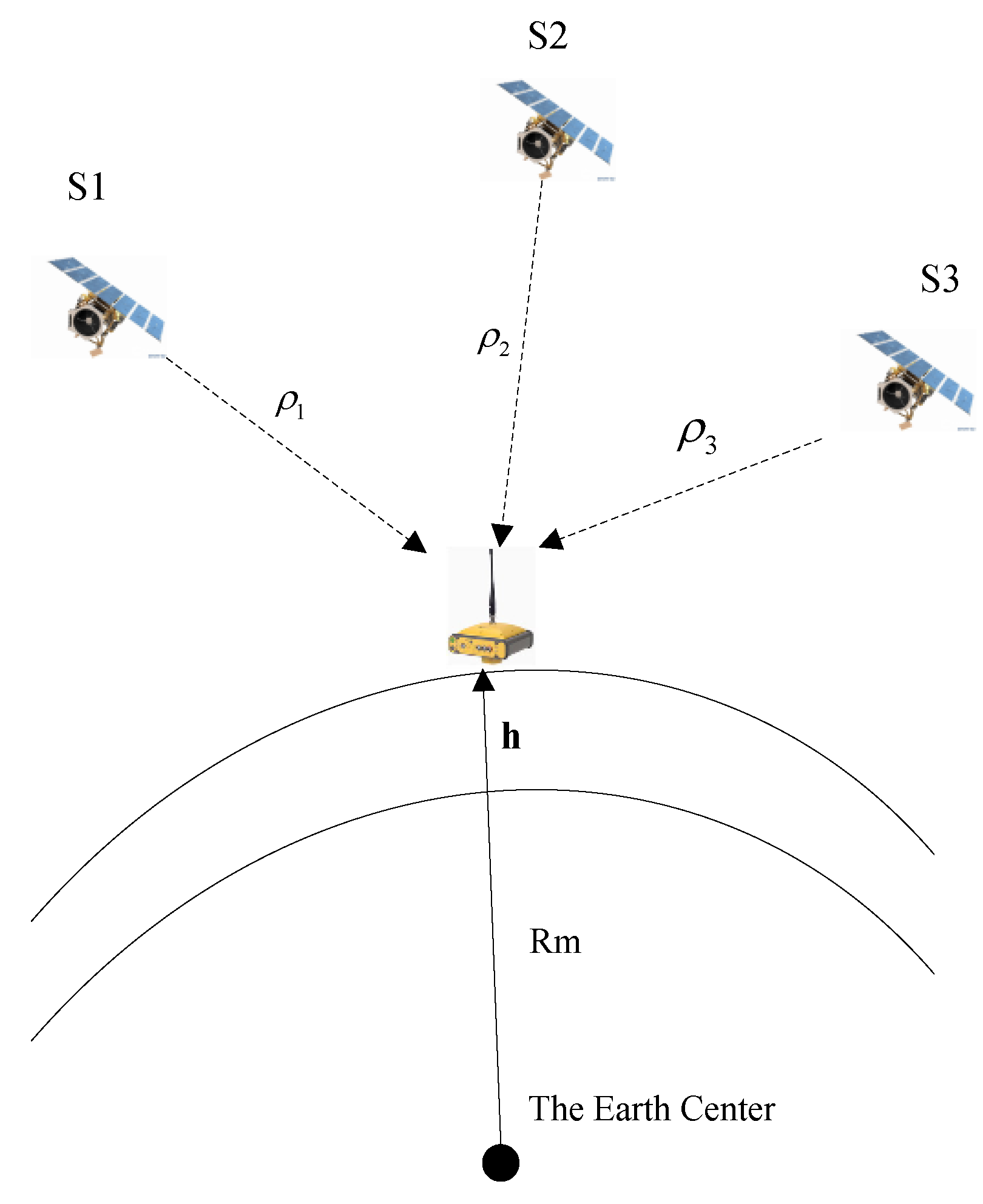
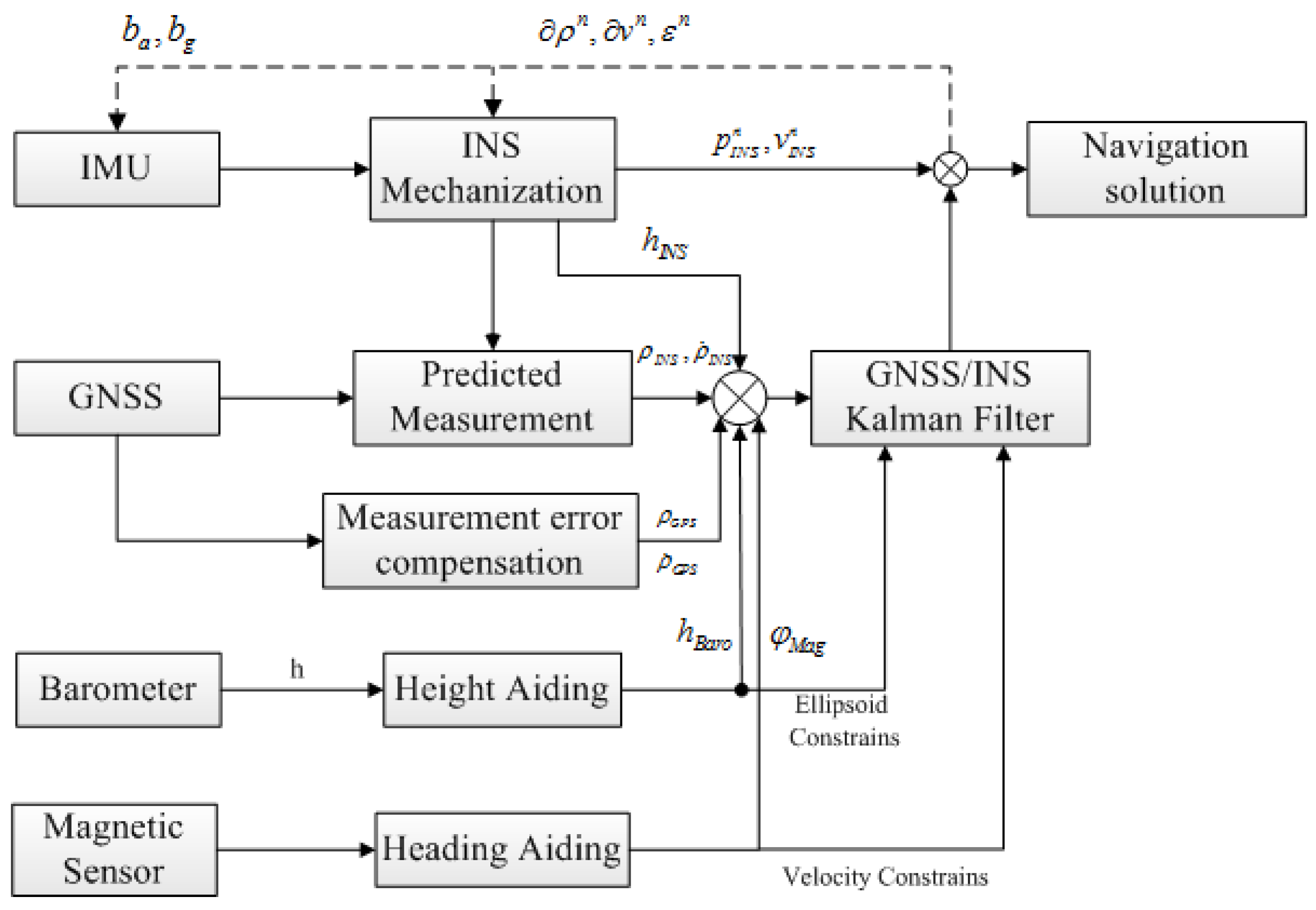
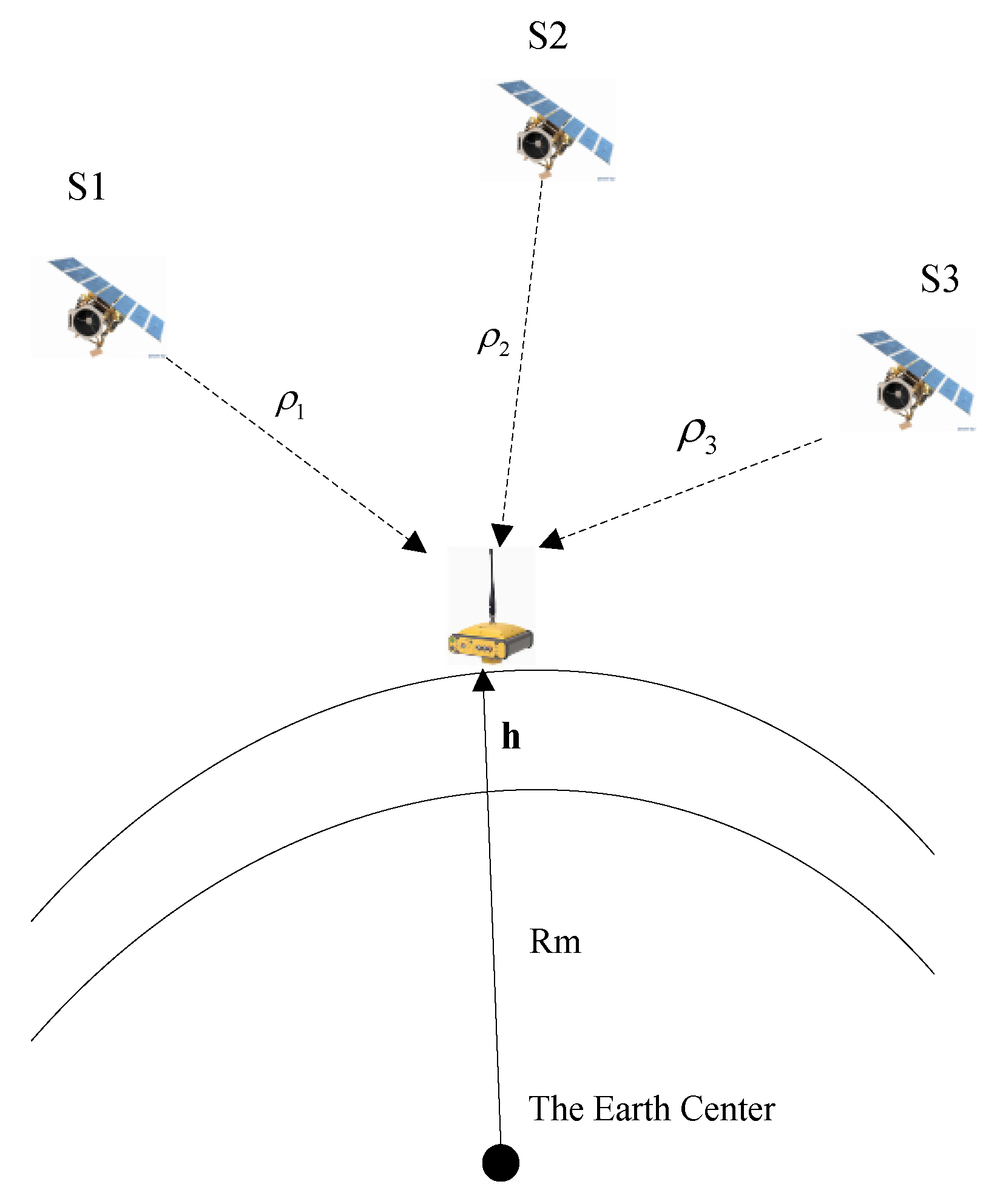
- We utilize both the barometer and magnetometer measurements, not only in a directly aiding manner, but also a pseudo-measurement and velocity measurement manner. Specifically, we present the method of using the height measurement by approximately modeling the Earth as a static pseudo satellite; also, the magnetometer measurements are used to aid the velocity measurement, which implicitly assumes that the receiver moves in the direction of its heading, which actually is an implicit NHC approach. The benefit is that the measurements are more deeply coupled with the indirect related states in the Kalman filter. For example, the height measurements can even be potentially correlated with the horizontal position errors; also, the magnetometer measurements may enhance not only the INS heading, but also the horizontal velocities.
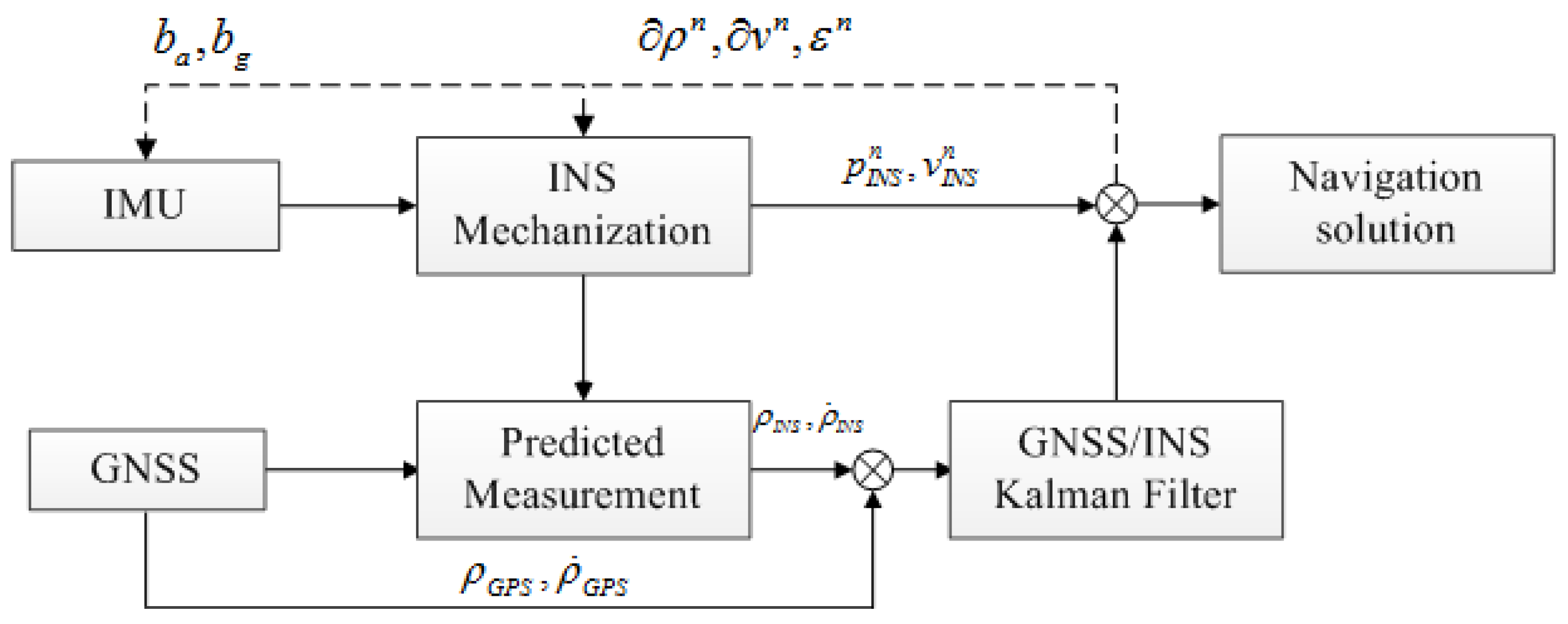
2. Standard Tightly-Coupled GNSS/INS Integration
2.1. Tightly-Coupled System State Model
2.2. Tightly-Coupled System Measurement Model
3. Overview of the Proposed System
4. Adaptive Kalman Filter
4.1. Theorem: Noise Estimation Based on Redundant Measurement Systems
4.2. Proof of the Theorem
4.3. Availability of Using the Theorem in a GNSS/INS Tightly-Coupled System
5. Height/Heading-Aiding Modes
5.1. Height Aiding
5.1.1. Direct Height Aiding
5.1.2. Pseudo-Measurement Height Aiding
5.2. Heading Aiding
5.2.1. Direct Heading Aiding
5.2.2. Velocity Measurement Aiding
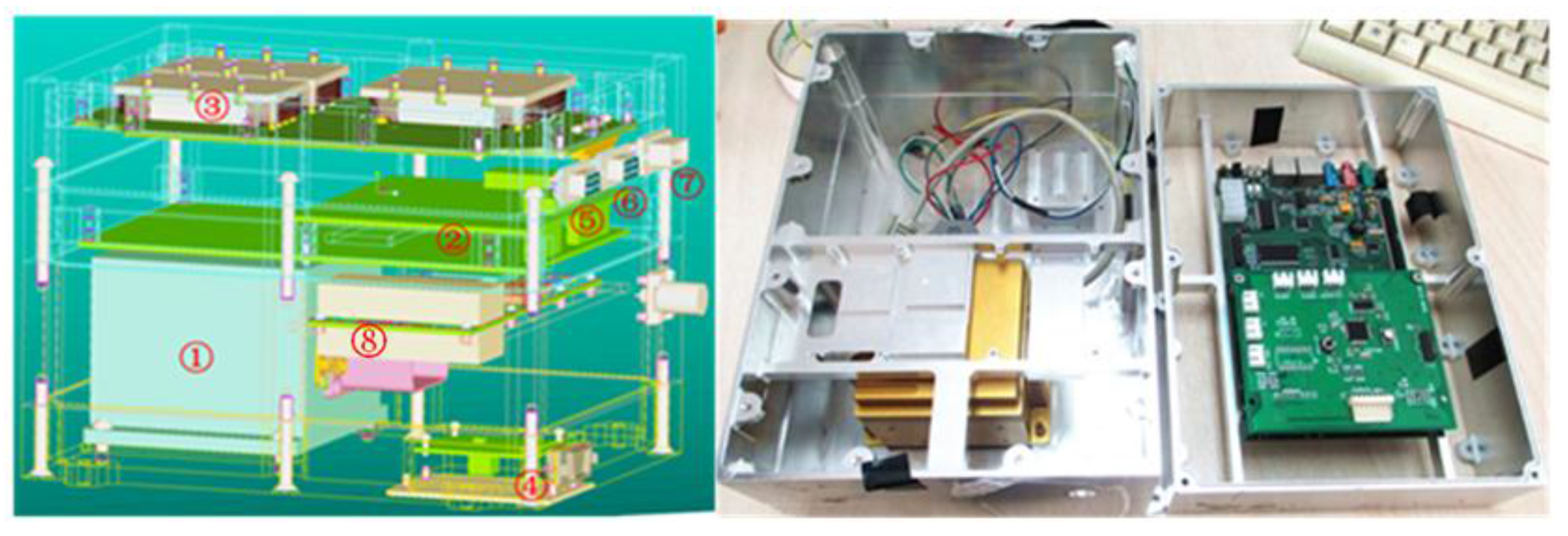
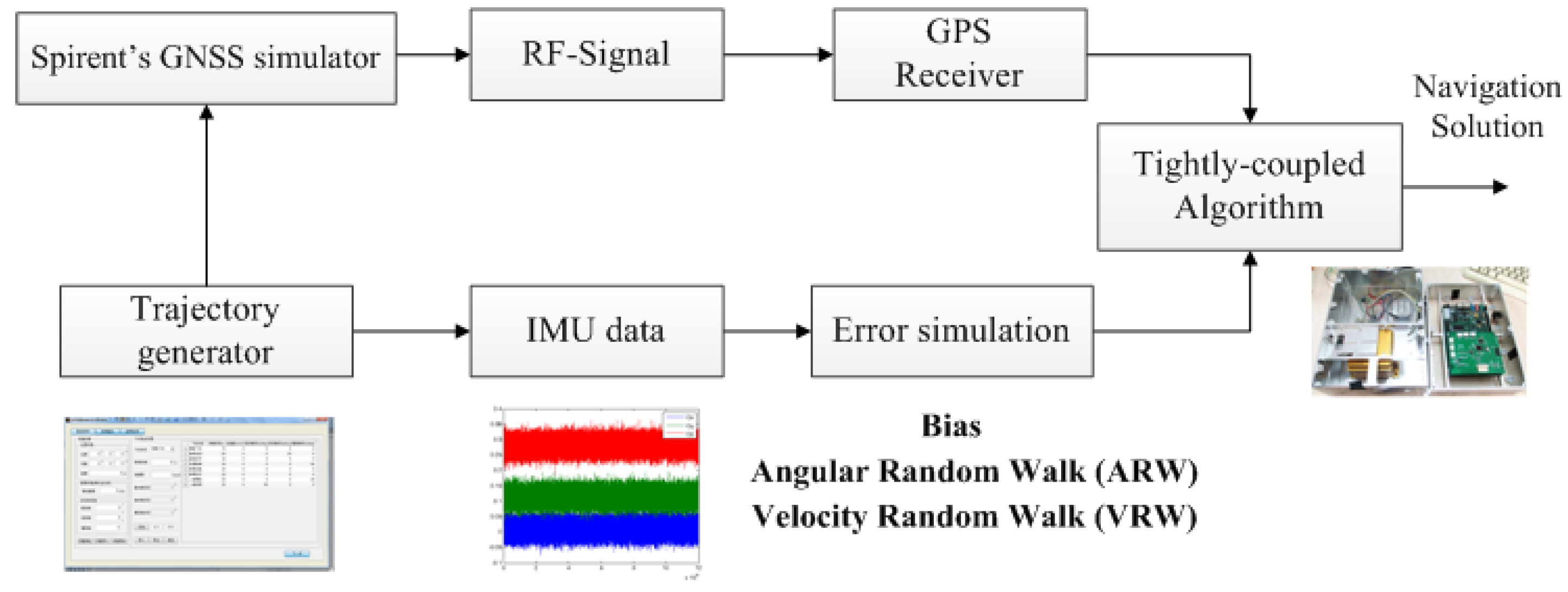
6. System Platform Implementation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
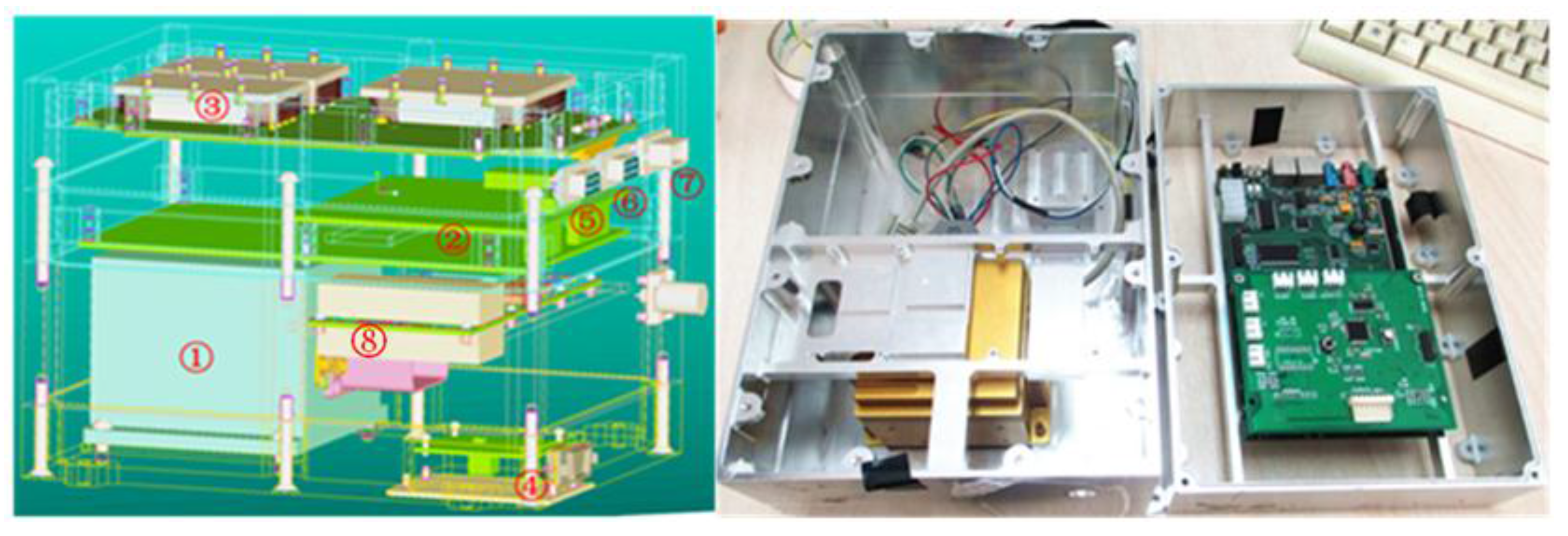
| No. | Component | No. | Component |
|---|---|---|---|
| 1 | Crossbow IMU-440 | 5 | Output Interface (RS-232) |
| 2 | Core Processor (6416) | 6 | JTAG (Joint Test Action Group) interface |
| 3 | Voltage Converter (28 V to 5 V) | 7 | Voltage Input (28 V) |
| 4 | Magnetometer TCM5 | 8 | GNSS Receiver |
7. Tests and Results
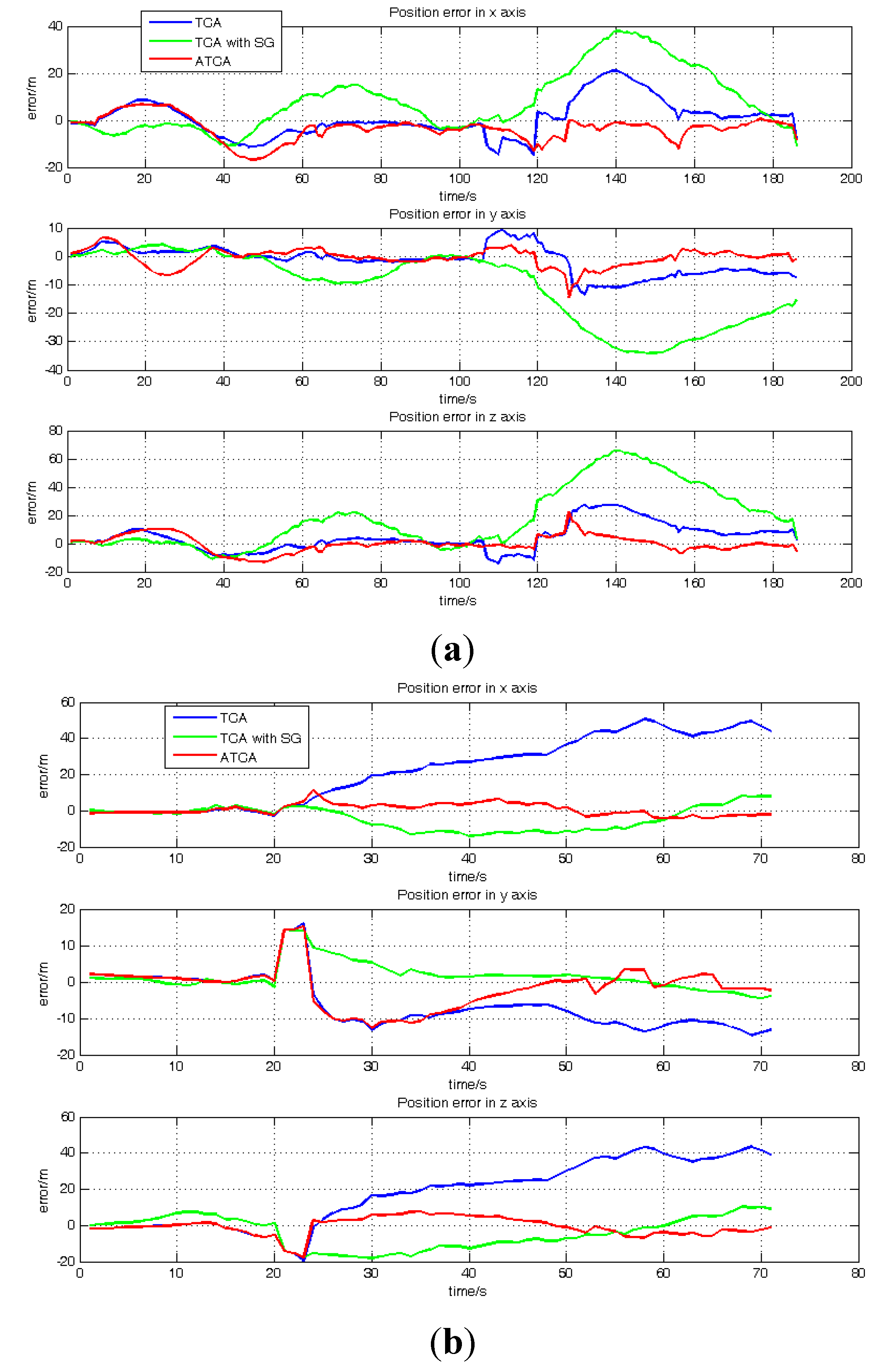
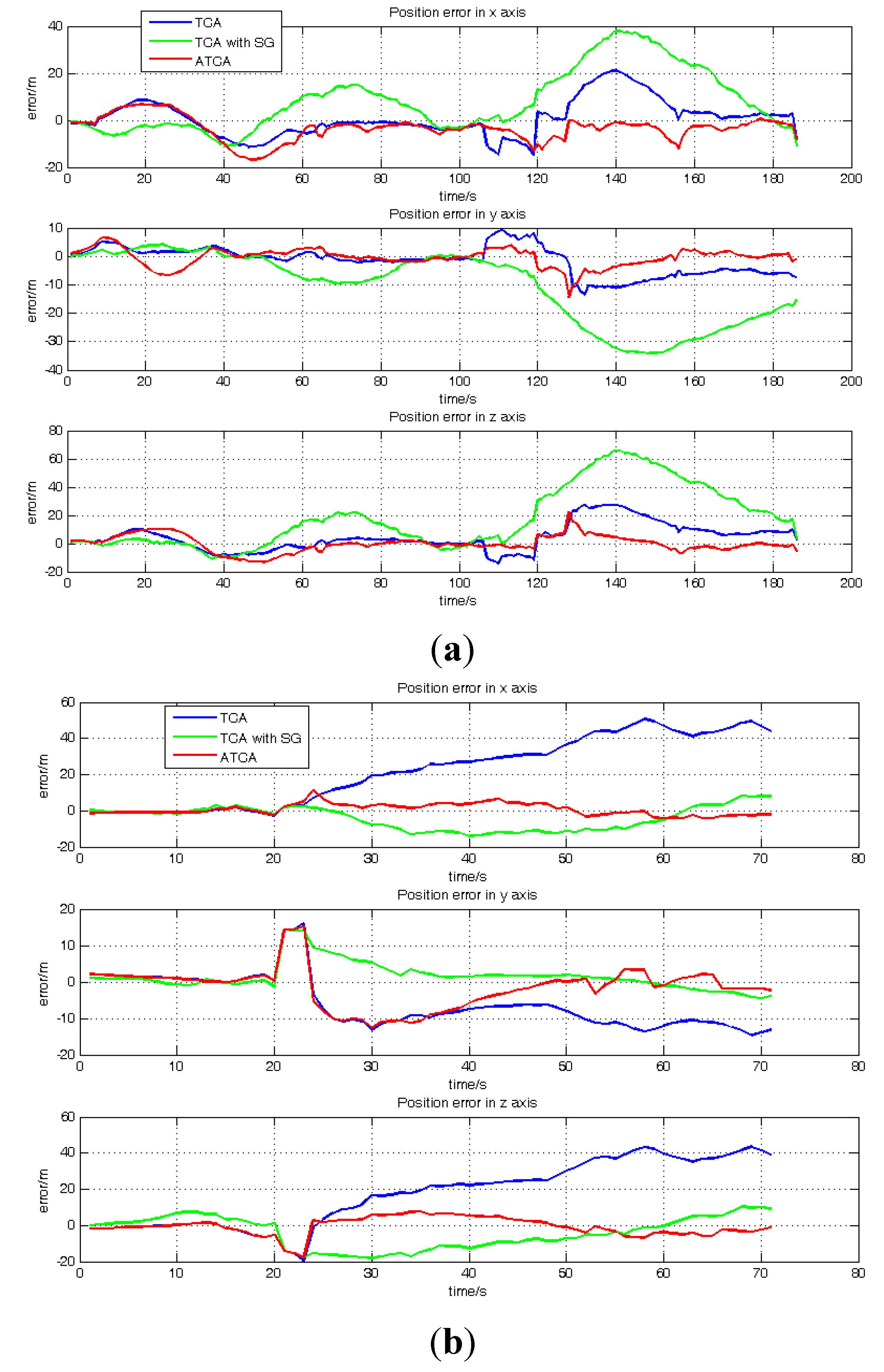
7.1. The Description of the Algorithms for Comparison
- Standard tightly-coupled integrated system: also referred to as centralized integration. An integration filter is used to fuse INS and GPS measurement. The raw pseudo-range and Doppler measurements from GPS tracking loop output and those from INS prediction are combined to form the input of the centralized integration filter. The filter directly accepts their differences to obtain the INS error estimates [22]. This approach is represented as Standard TC in the following illustration.
- Standard tightly-coupled integrated system with height and heading aiding: based on the standard tightly-coupled integration system, the external height and heading information are involved in the measurement model of the filter; the differences of INS-derived height and heading and the measured height and heading (from barometer and magnetometer) are added in the measurement equation for the update [23]. This approach is represented as TCA (tightly-coupled with height and heading aiding) in the following illustration.
- Standard tightly-coupled integrated system with height and heading aiding and the improved Sage-Husa (SG) method for measurement noise estimation: An adaptive measurement noise estimation strategy using the improved SG method is introduced in the previously described “standard tightly-coupled integrated system with height and heading aiding” method. The improved SG is the most commonly-used noise estimation method in adaptive Kalman filter [28]; it is an innovation based adaptive estimation (IAE), which utilizes new statistical information from the innovation sequence to correct the estimation of the states. The measurement noise covariance is derived from the innovative sequence according to the following equation:where , and denote the measurement, measurement matrix and prediction in the Kalman filter. denotes the innovative sequence, N denotes the window size, and denotes the noise covariance. This approach is represented as TCA with SG in the following illustration.
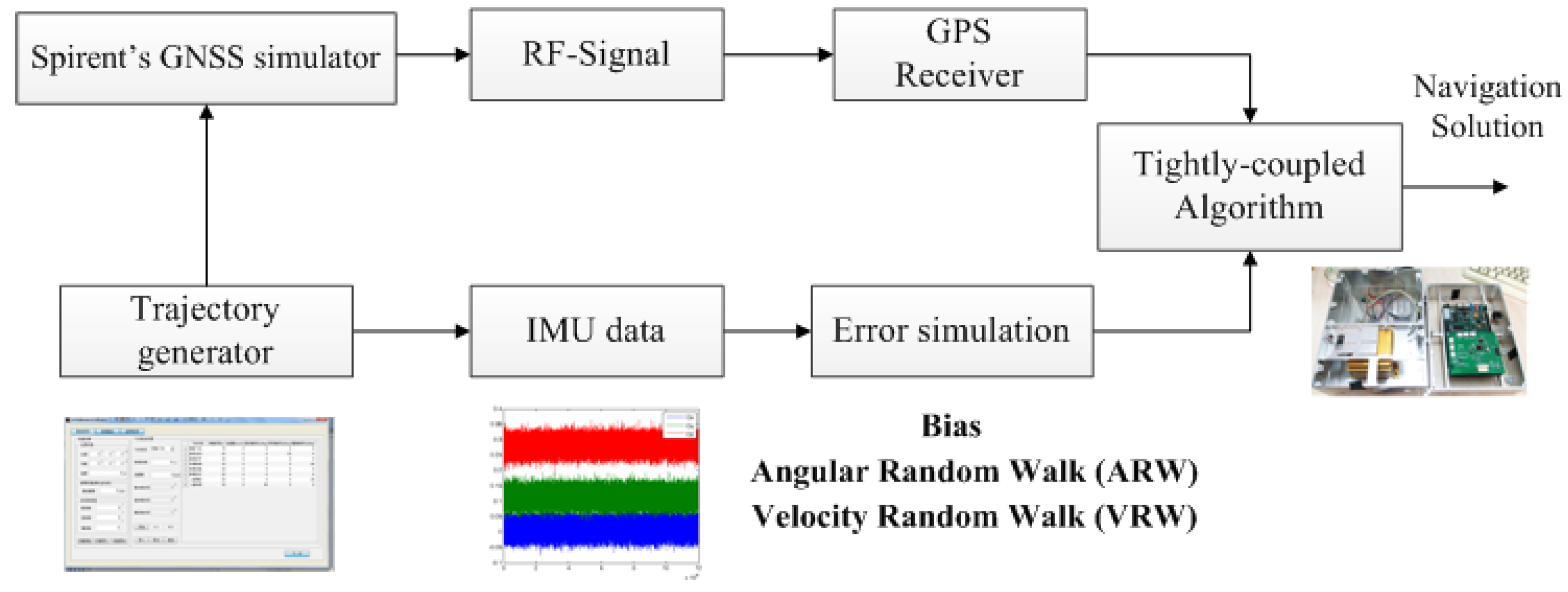
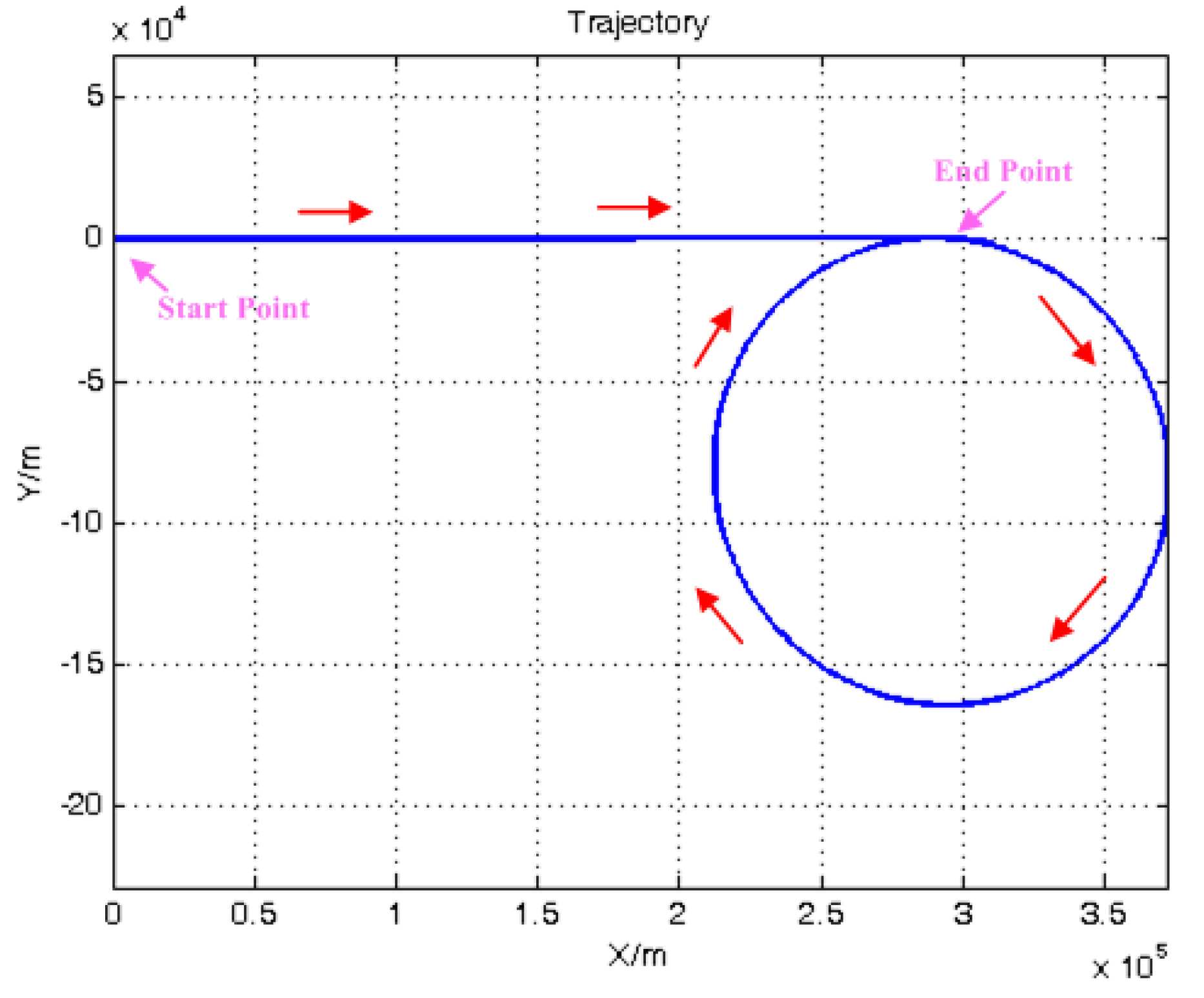
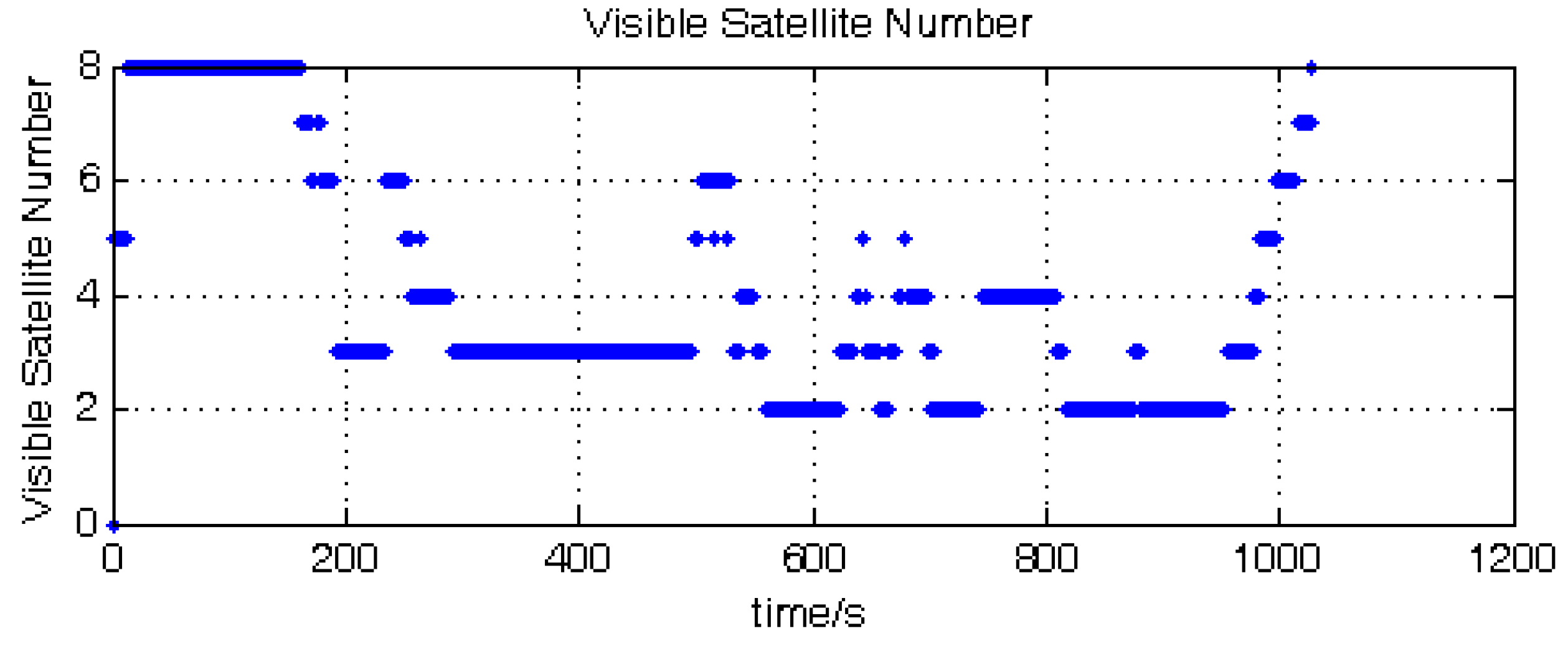
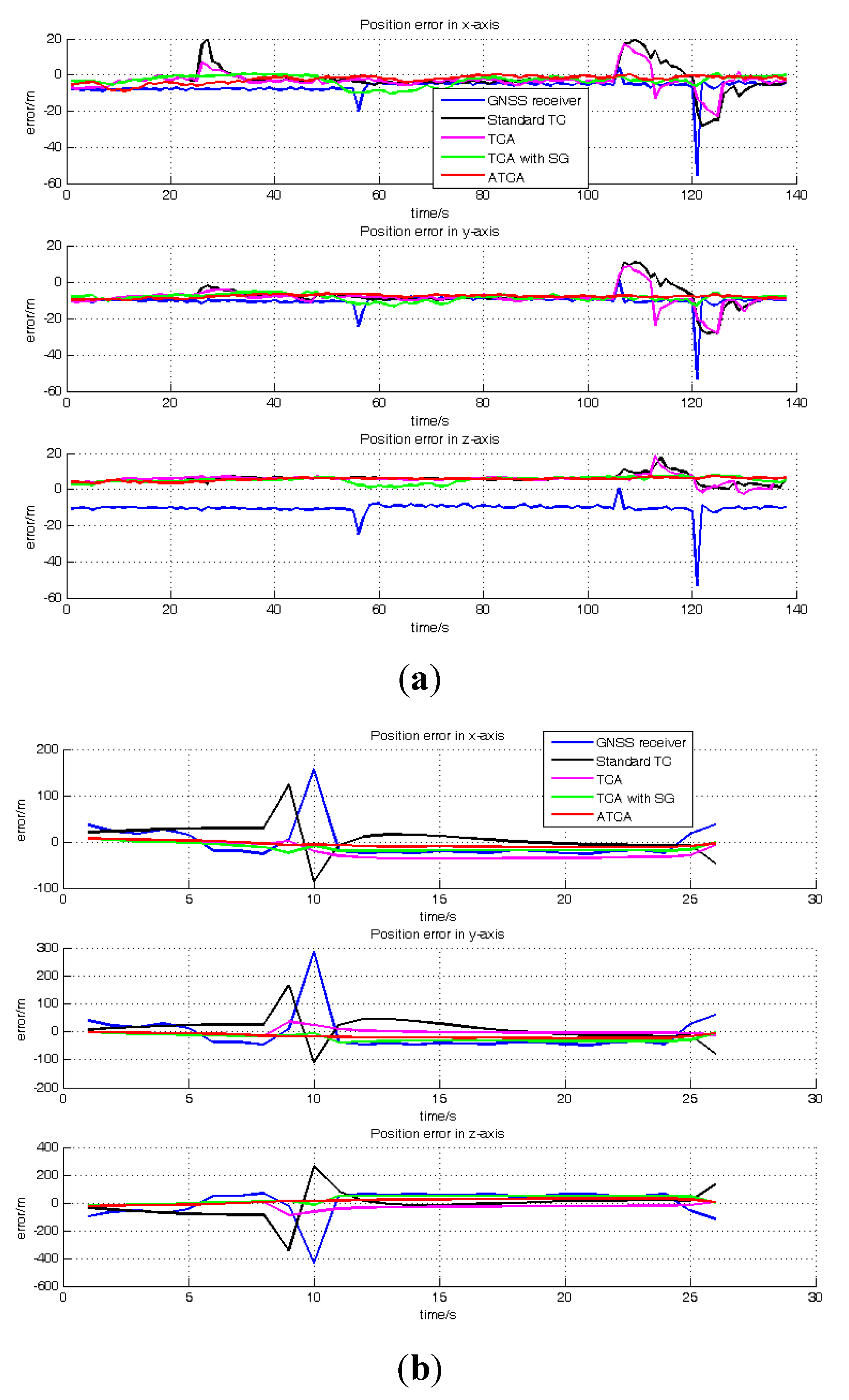
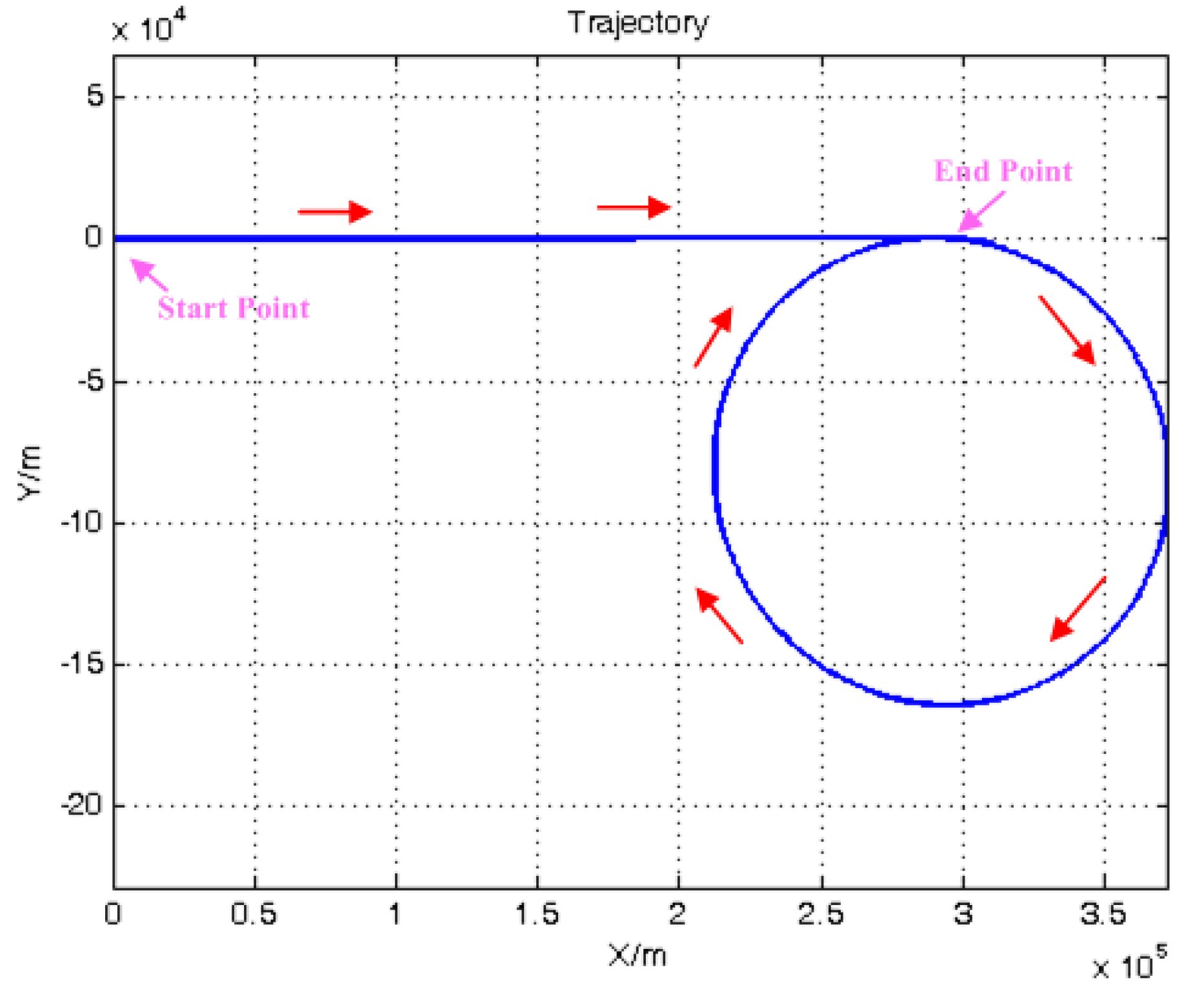
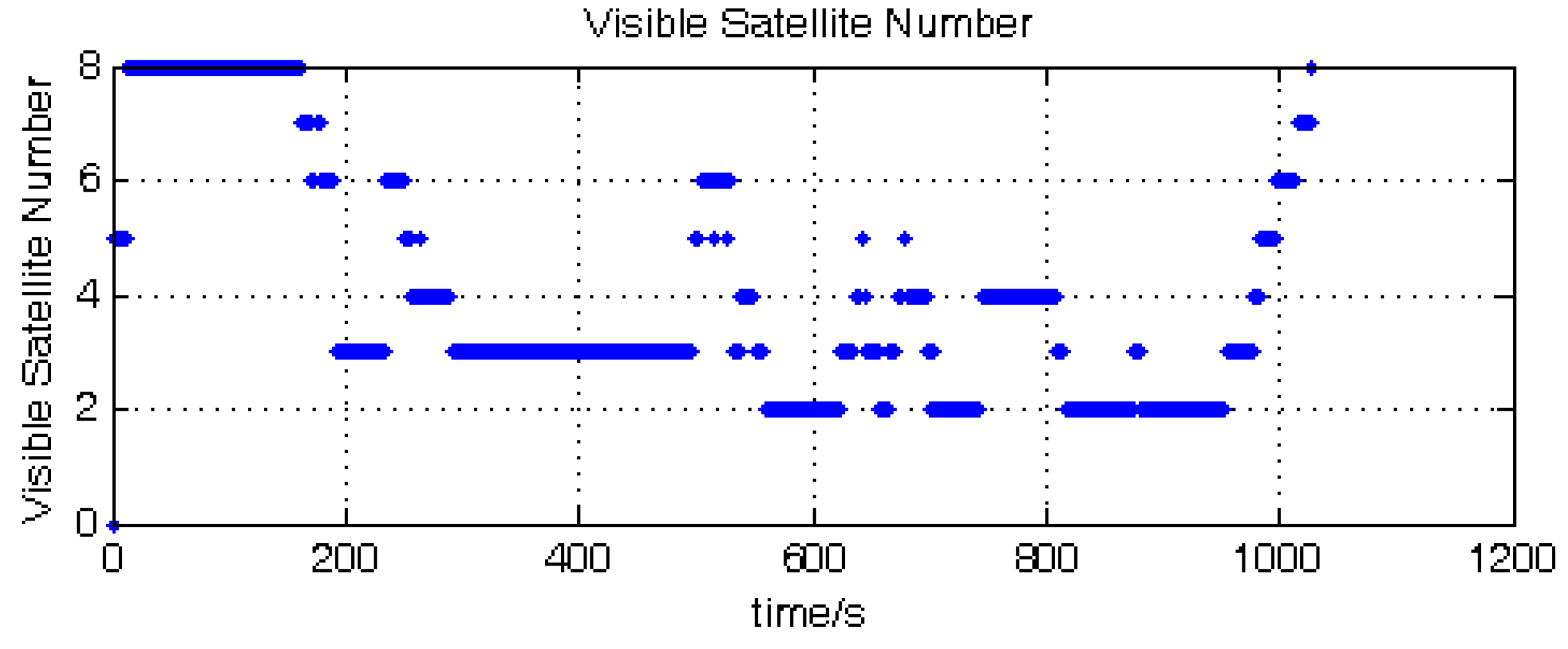
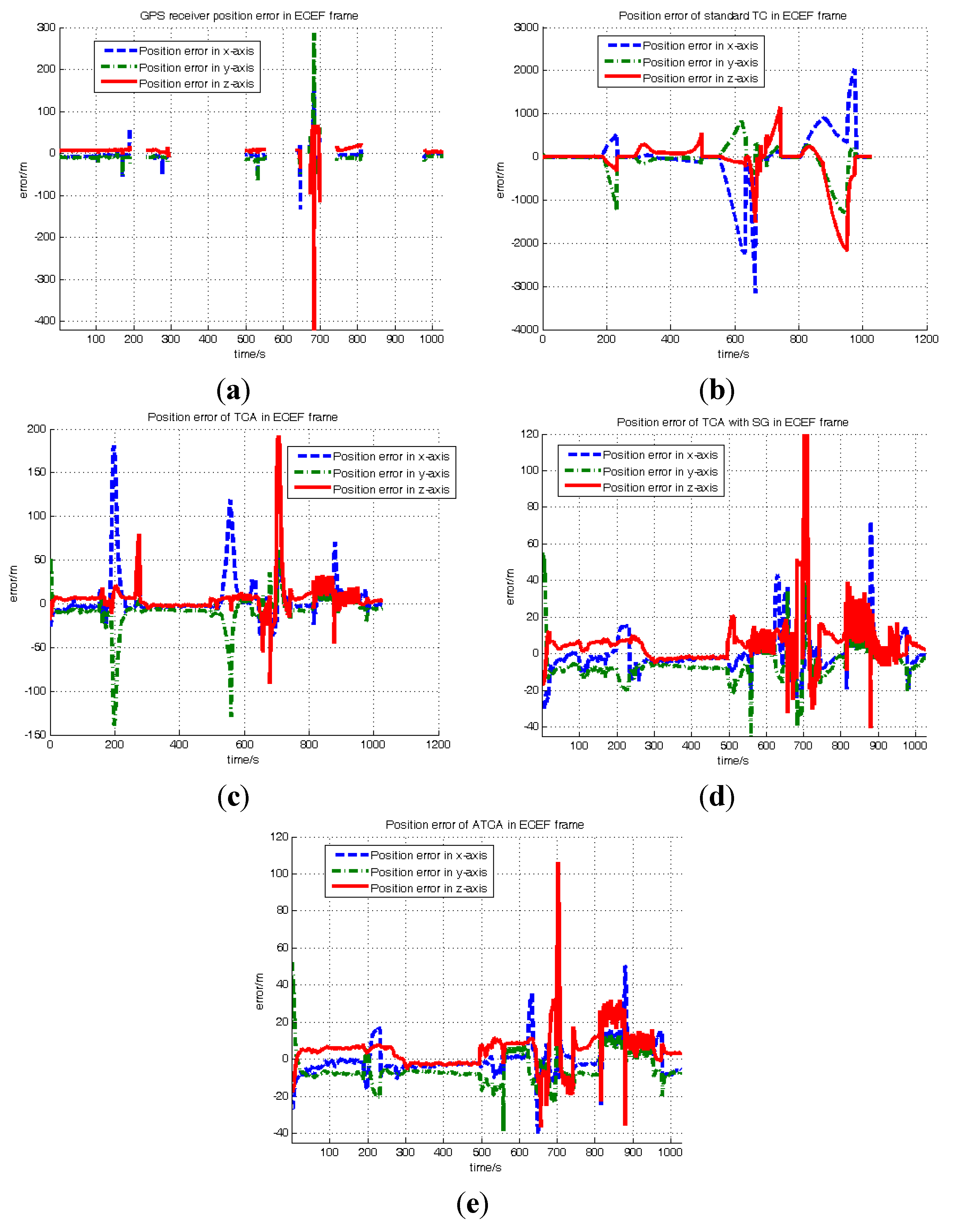
7.2. Simulation Experiment
| Satellite Number More than 4 | Satellite Number Less than 4 | |||||
|---|---|---|---|---|---|---|
| X (m) | Y (m) | Z (m) | X (m) | Y (m) | Z (m) | |
| GNSS receiver | 12.1204 | 19.7539 | 26.4187 | NA | NA | NA |
| Standard TC | 10.4966 | 14.4910 | 24.6421 | 778.5215 | 456.6524 | 643.8866 |
| TCA | 10.0638 | 9.7813 | 13.5467 | 33.3155 | 27.1117 | 26.2960 |
| TCA with SG | 7.9877 | 11.8187 | 11.7559 | 13.0102 | 11.0251 | 24.4045 |
| ATCA | 5.4093 | 9.6268 | 8.2195 | 10.0279 | 8.8454 | 13.3769 |

| The Period of 189–233 s | The Period of 531–700 s | |||||
|---|---|---|---|---|---|---|
| X (m) | Y (m) | Z (m) | X (m) | Y (m) | Z (m) | |
| Standard TC | 350.6096 | 707.5608 | 198.8642 | 1163.5 | 367.2 | 342.6 |
| TCA | 93.3646 | 77.1261 | 12.6208 | 37.7900 | 28.5764 | 16.7951 |
| TCA with SG | 11.5668 | 15.5311 | 6.4813 | 15.2633 | 14.6680 | 17.4740 |
| ATCA | 13.0553 | 14.0751 | 6.0460 | 12.0622 | 12.1148 | 12.9468 |
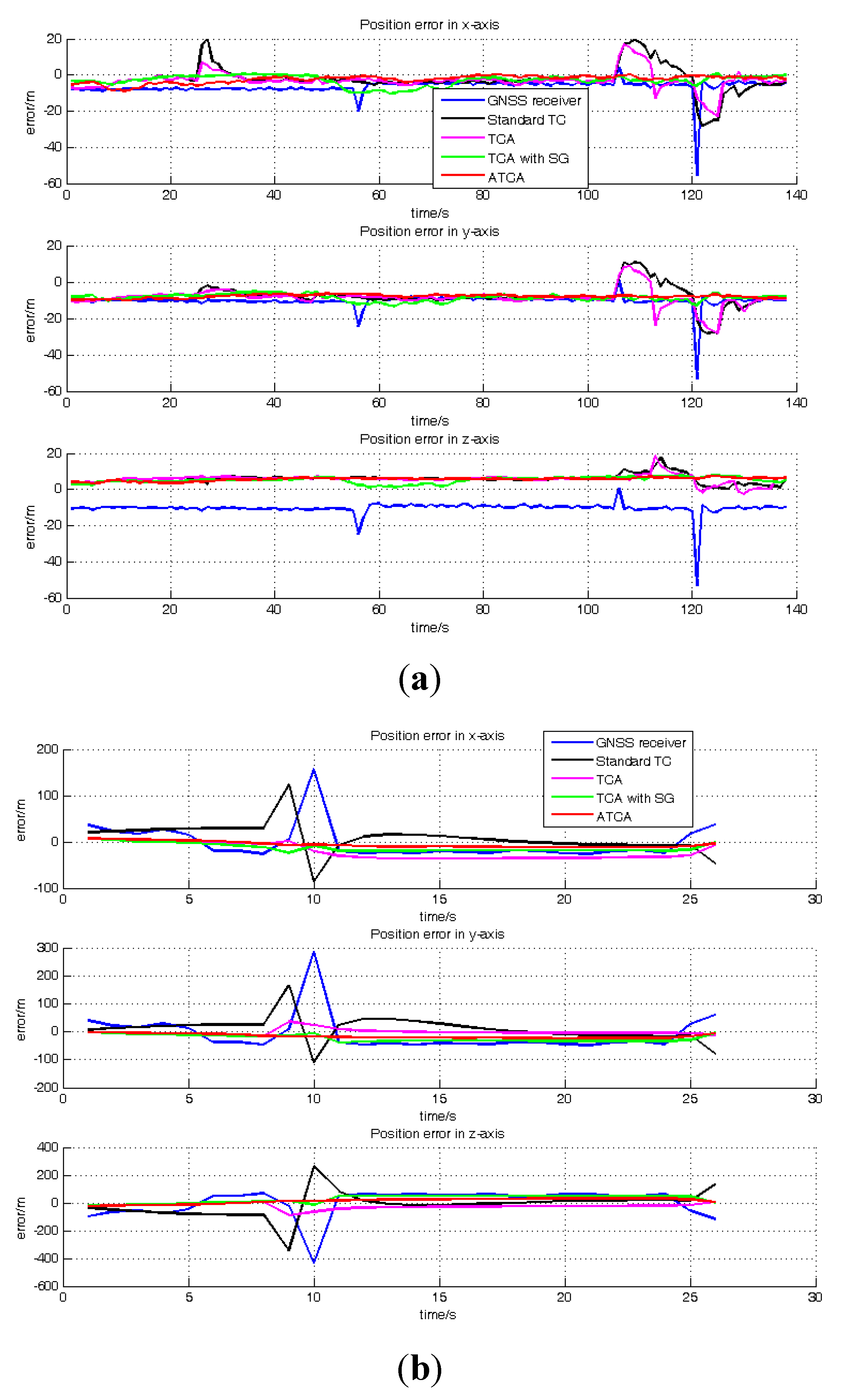
| The Period of 50–187 s | The Period of 673–698 s | |||||
|---|---|---|---|---|---|---|
| X (m) | Y (m) | Z (m) | X (m) | Y (m) | Z (m) | |
| GNSS | 8.0610 | 11.2364 | 7.0904 | 38.1481 | 67.8798 | 104.6477 |
| Standard TC | 7.6642 | 9.8481 | 6.3391 | 34.9907 | 47.0839 | 99.4847 |
| TCA | 5.9293 | 10.1106 | 6.1428 | 26.5837 | 10.8538 | 31.2858 |
| TCA with SG | 4.1211 | 8.9007 | 5.4018 | 15.4418 | 26.3500 | 38.1509 |
| ATCA | 3.1442 | 8.0449 | 5.7103 | 8.7274 | 17.6114 | 22.9864 |
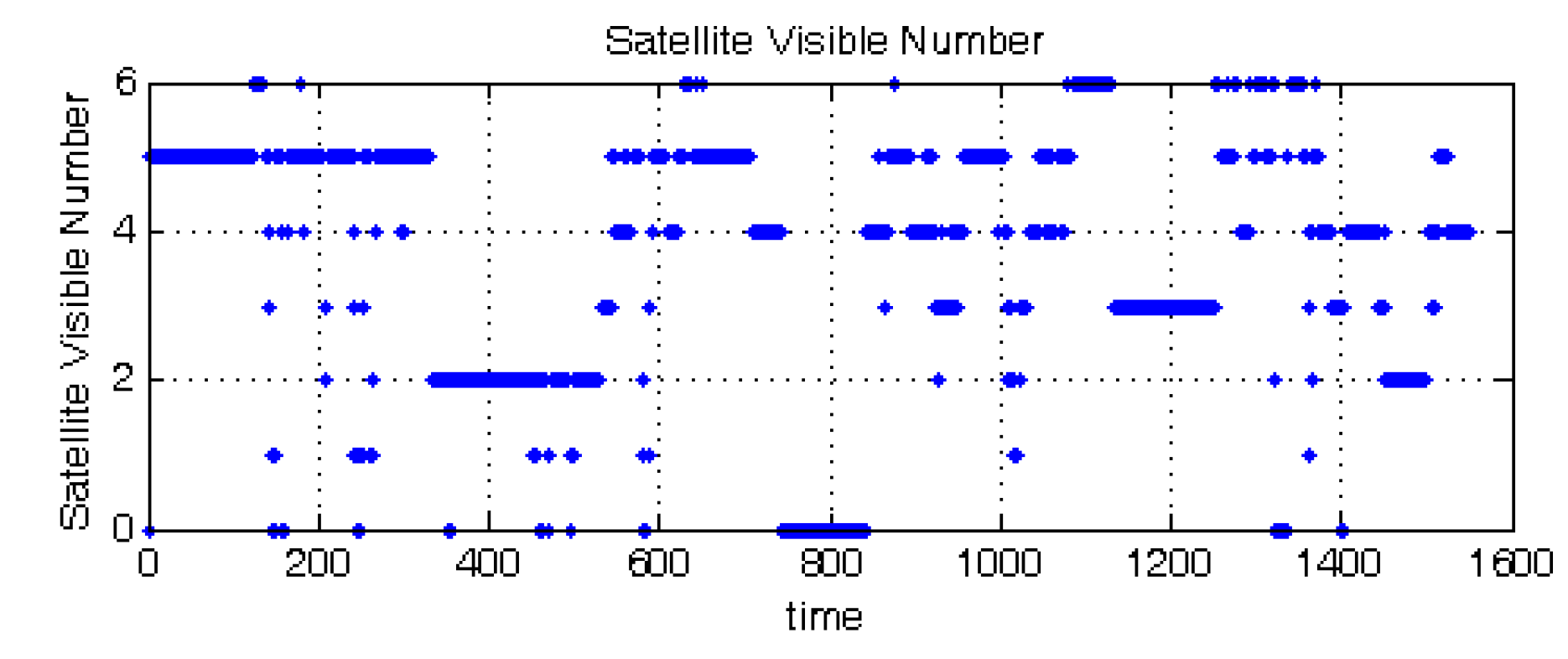
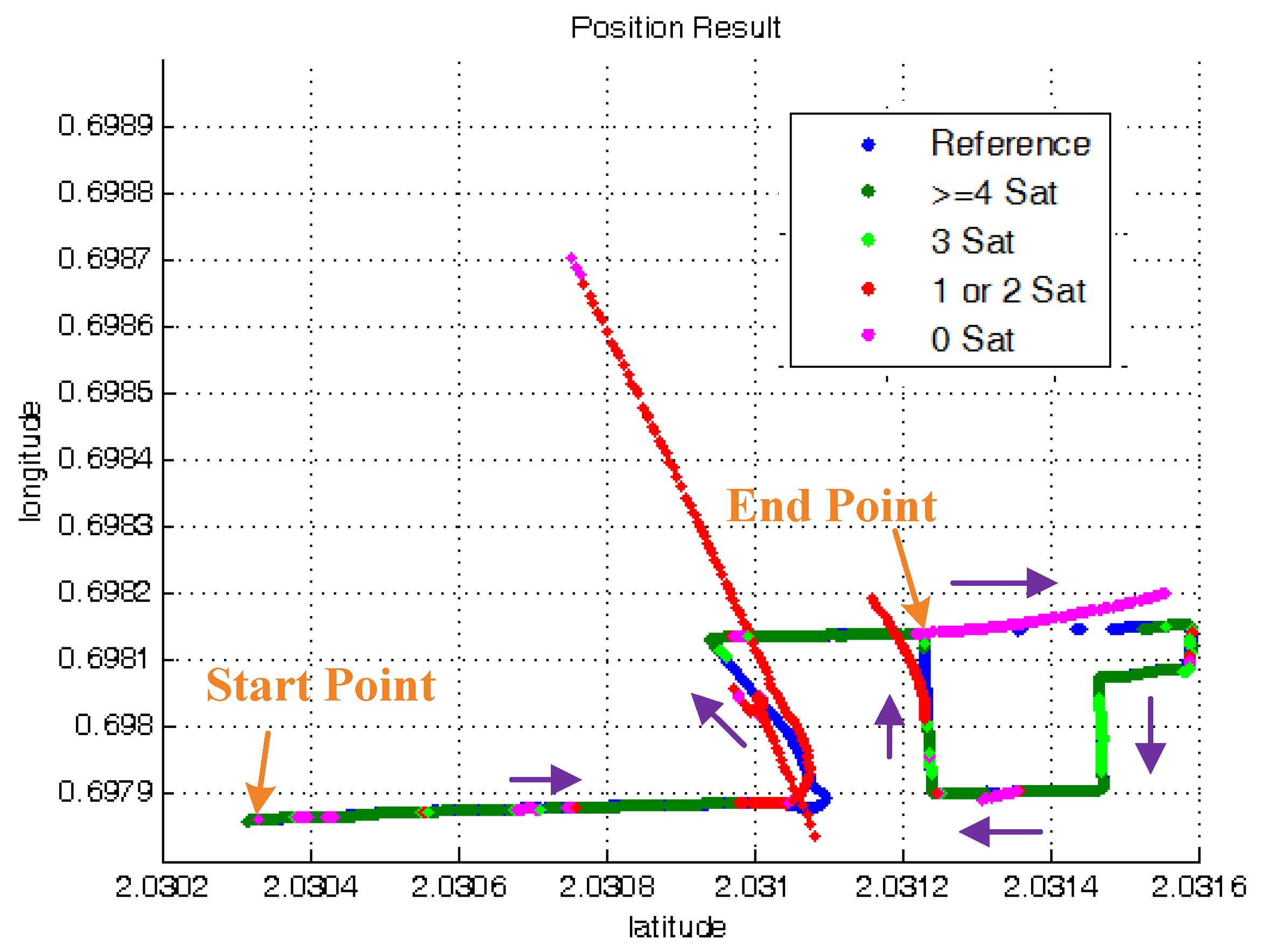
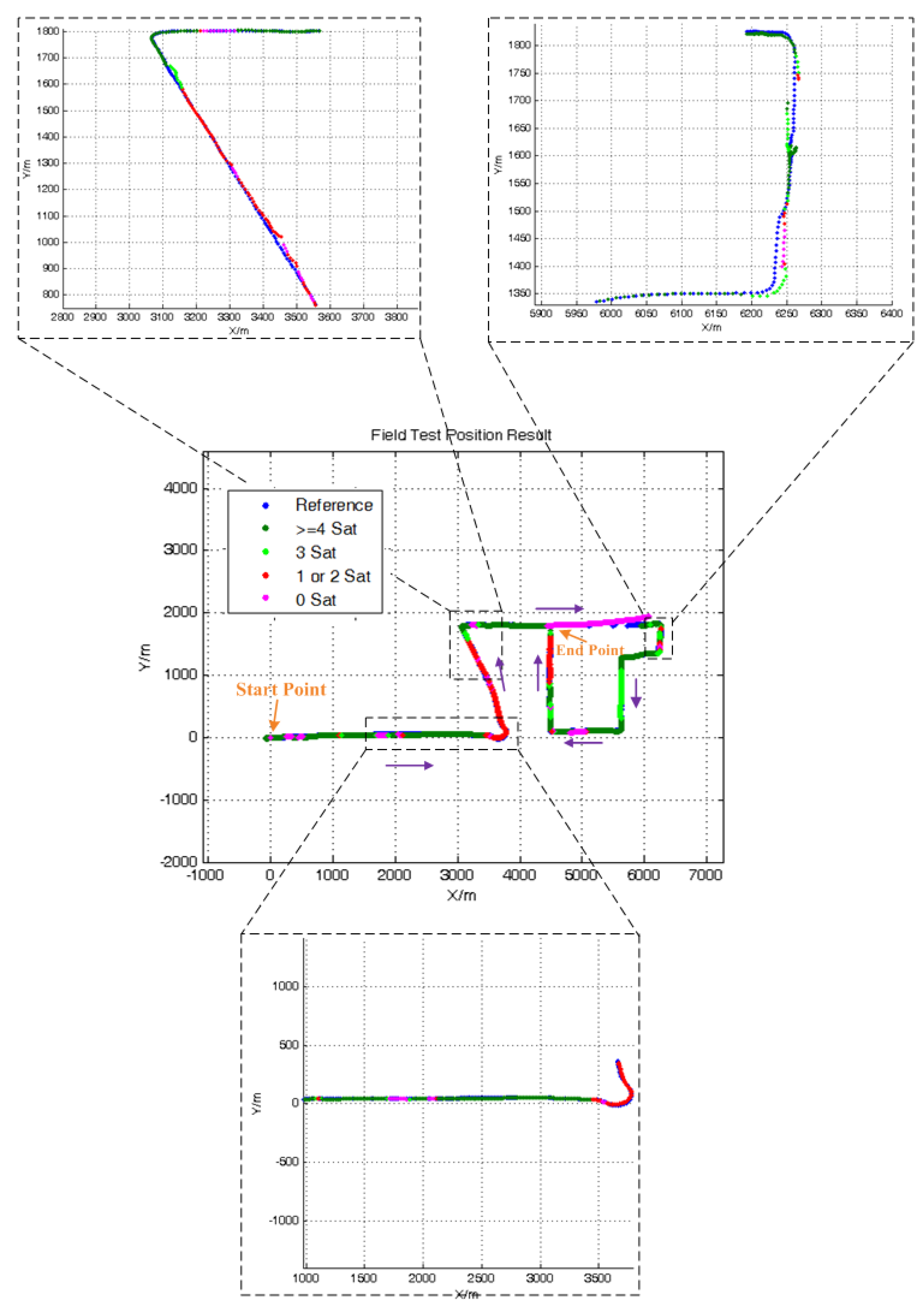
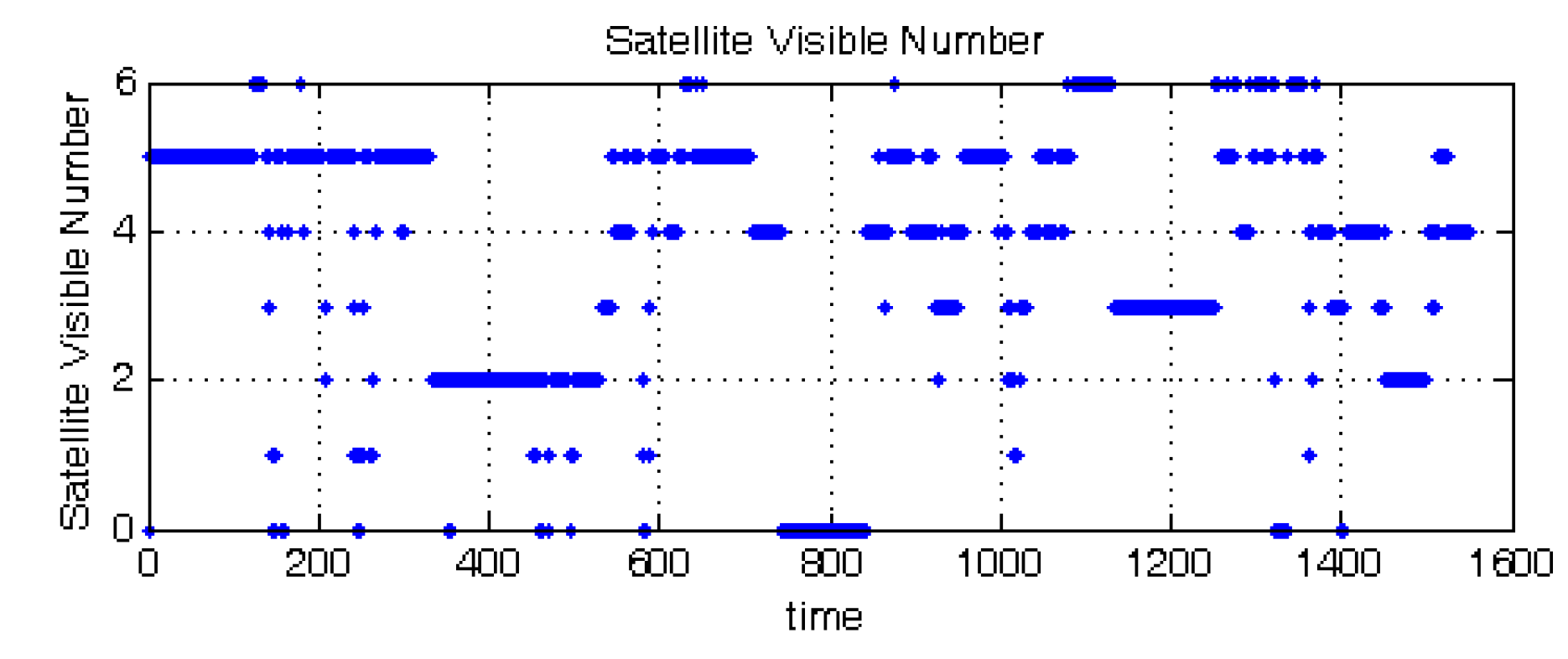
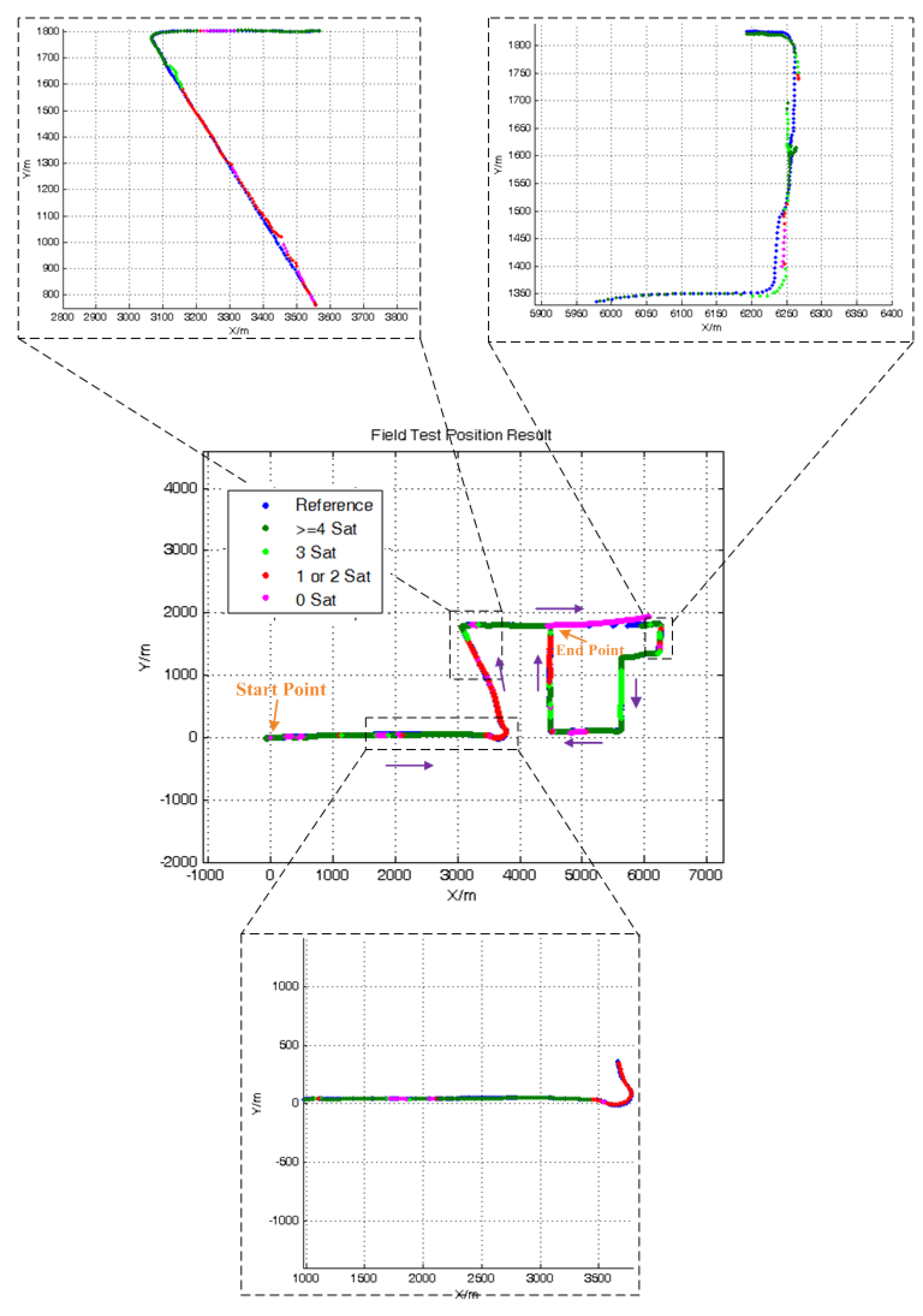
7.3. Practical Experiment

| Error X (m) | Error Y (m) | Error Z (m) | |
|---|---|---|---|
| Standard TC | 355.8420 | 276.7677 | 483.7556 |
| TCA | 8.4694 | 4.0710 | 8.1874 |
| TCA with SG | 6.4785 | 3.8244 | 8.8093 |
| ATCA | 3.4617 | 3.6882 | 4.3391 |
| The Period of 345–530 s | The Period of 1450–1500 s | |||||
|---|---|---|---|---|---|---|
| X (m) | Y (m) | Z (m) | X (m) | Y (m) | Z (m) | |
| Standard TC | 794.757 | 628.0711 | 1076.4786 | 126.3409 | 39.7067 | 109.4160 |
| TCA | 7.7362 | 4.85646 | 9.48123 | 18.6519 | 6.94387 | 17.7130 |
| TCA with SG | 13.1257 | 12.4301 | 21.6142 | 6.4785 | 3.8244 | 8.8093 |
| ATCA | 5.1612 | 3.14215 | 5.86392 | 3.17873 | 5.62555 | 5.11066 |
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix
A. System State Mode
A.1. First Matrix
A.2. Second Matrix
A.3.Third Matrix
A.4. Fourth Matrix
B. Measurement Mode
References
- Cong, L.; Li, E.; Qin, H.; Ling, K.V.; Xue, R. A performance improvement method for low-cost land vehicle GPS/MEMS-INS attitude determination. Sensors 2015, 15, 5722–5746. [Google Scholar] [CrossRef] [PubMed]
- Han, H.; Wang, J.; Wang, J.-L.; Tan, X. Performance analysis on carrier phase-based tightly-coupled GPS/BDS/INS integration in GNSS degraded and denied environments. Sensors 2015, 15, 8685–8711. [Google Scholar] [PubMed]
- Shin, E.-H. Estimation techniques for low-cost inertial navigation. Ph.D. Thesis, Department of Geomatics Engineering, University of Calgary, Calgary, AL, Canada, 2005. [Google Scholar]
- Tawk, Y.; Tomé, P.; Botteron, C.; Stebler, Y.; Farine, P.A. Implementation and performance of a GPS/INS tightly coupled assisted PLL architecture using MEMS inertial sensors. Sensors 2014, 14, 3768–3796. [Google Scholar] [CrossRef] [PubMed]
- Cui, Y; Ge, S.S. Autonomous vehicle positioning with GPS in urban canyon environments. IEEE Trans. Robot. Autom. 2003, 19, 15–25. [Google Scholar]
- Chiang, K.-W.; Duong, T.T.; Liao, J.-K. The performance analysis of a real-time integrated INS/GPS vehicle navigation system with abnormal GPS measurement elimination. Sensors 2013, 13, 10599–10622. [Google Scholar] [CrossRef] [PubMed]
- Godha, S.; Petovello, M.; Lachapelle, G. Performance analysis of MEMS IMU/HSGPS/magnetic sensor integrated system in urban canyons. In Proceedings of the Institute of Navigation Global Navigation Satellite System, Long Beach, CA, USA, 13–16 September 2005.
- Karamat, T.; Georgy, J.; Iqbal, U.; Noureldin, A. A tightly-coupled reduced multi-sensor system for urban navigation. In Proceedings of the 22nd International Technical Meeting of the Satellite Division of the Institute of Navigation, Savannah, GA, USA, 22–25 September 2009.
- Soloviev, A. Tight coupling of GPS, laser scanner, and inertial measurements for navigation in urban environments. In Proceedings of the Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008.
- Wang, X.; Toth, C.; Grejner-Brzezinska, D.; Sun, H. Integration of terrestrial laser scanner for ground navigation in GPS-challenged environment. In Proceedings of the XXI Congress of International Society for Photogrammetry and Remote Sensing, Beijing, China, 3–11 July 2008.
- Dissanayake, G.; Sukkarieh, S.; Nebot, E. The aiding of a low-cost strapdown inertial measurement unit using vehicle model constraints for land vehicle applications. IEEE T. Robot. Autom. 2001, 17, 731–747. [Google Scholar] [CrossRef]
- Syed, Z.; Aggarwal, P.; Yang, Y.; El-Sheimy, N. Improved vehicle navigation using aiding with tightly coupled integration. In Proceedings of the IEEE Vehicular Technology Conference, Singapore, 11–14 May 2008.
- Klein, I.; Filin, S.; Toledo, T. Vehicle constraints enhancement for supporting INS navigation in urban environments. Navigation 2011, 58, 7–15. [Google Scholar] [CrossRef]
- Crassidis, J.L.; Markley, F.L.; Cheng, Y. Survey of nonlinear attitude estimation methods. J. Guid. Control Dynam. 2007, 30, 12–28. [Google Scholar] [CrossRef]
- Li, Y.; Niu, X.; Zhang, Q.; Zhang, H.; Shi, C. An in situ hand calibration method using a pseudo-observation scheme for low-end inertial measurement units. Meas. Sci. Technol. 2012, 23. [Google Scholar] [CrossRef]
- Georgy, J.; Noureldin, A.; Korenberg, M.J.; Bayoumi, M.M. Modeling the stochastic drift of a MEMS-based gyroscope in Gyro/Odometer/GPS integrated navigation. IEEE T. Intell. Transp. 2010, 11, 856–872. [Google Scholar] [CrossRef]
- Nassar, S.; El-Sheimy, N. Wavelet analysis for improving INS and INS/DGPS navigation accuracy. J. Navigation 2005, 58, 119–134. [Google Scholar] [CrossRef]
- Skog, I.; Händel, P. In-car positioning and navigation technologies—A survey. IEEE Trans. Intell. Transp. 2009, 10, 4–21. [Google Scholar] [CrossRef]
- El-Sheimy, N.; Schwarz, K.P. Navigating urban areas by VISAT—A mobile mapping system integrating GPS/INS/digital cameras for GIS applications. Navigation 1998, 45, 275–285. [Google Scholar] [CrossRef]
- Shin, E.-H.; El-Sheimy, N. Accuracy Improvement of Low Cost INS/GPS for Land Applications. Master Thesis, Department of Geomatics Engineering, University of Calgary, Calgary, AL, Canada, 2001. [Google Scholar]
- Godha, S. Performance Evaluation of Low Cost MEMS-based IMU Integrated with GPS for Land Vehicle Navigation Application. Master Thesis, Department of Geomatics Engineering, University of Calgary, Calgary, AL, Canada, 2006. [Google Scholar]
- Yang, Y. Tightly Coupled MEMS INS/GPS Integration with INS Aided Receiver Tracking Loops. Ph.D. Thesis, Department of Geomatics Engineering, University of Calgary, Calgary, AL, Canada, 2008. [Google Scholar]
- Angrisano, A.; Petovello, M.; Pugliano, G. GNSS/INS integration in vehicular urban navigation. In Proceedings of the 23rd International Technical Meeting of the Satellite Division of the Institute of Navigation, Portland, OR, USA, 21–24 September 2010.
- Syed, Z. Design and Implementation Issues of a Portable Navigation System. Ph.D. Thesis, Department of Geomatics Engineering, University of Calgary, Calgary, AL, Canada, 2009. [Google Scholar]
- Ospina, J.C.F. Lever Arm Estimation—ENGO623 Course Talk; University of Calgary: Calgary, AL, Canada, 15 April 2015. [Google Scholar]
- Sage, A.P.; Husa, G.W. Adaptive filtering with unknown prior statistics. In Proceedings of the Joint Automatic Control Conference, Boulder, CO, USA, 4 August 1969.
- Hide, C.; Moore, T.; Smith, M. Adaptive Kalman filtering algorithms for integrating GPS and low cost INS. In Proceedings of the IEEE Position Location and Navigation Symposium, Monterey, CA, USA, 26–29 April 2004.
- Lo, K.; Lu, Q.; Kwon, W.H. Comments on “Optimal Solution of the Two-Stage Kalman Estimator”. IEEE Trans. Autom. Control 2002, 47, 198–199. [Google Scholar]
- Jiancheng, F.; Sheng, Y. Study on innovation adaptive EKF for in-flight alignment of airborne POS. IEEE Trans. Instrum. Meas. 2011, 60, 1378–1388. [Google Scholar] [CrossRef]
- Yang, Y.; Gao, W. An optimal adaptive Kalman filter. J. Geodesy 2006, 80, 177–183. [Google Scholar] [CrossRef]
- Gebre-Egziabher, D.; Elkaim, G.; Powell, J.D.; Parkinson, B. In A non-linear, two-step estimation algorithm for calibrating solid-state strapdown magnetometers. In Proceeding of the 8th International St. Petersburg Conference on Navigation Systems, St. Petersburg, Russia, 28–30 May 2001.
- Li, Y.; Georgy, J.; Niu, X.; Li, Q.; El-Sheimy, N. Autonomous calibration of mems gyros in consumer portable devices. IEEE Sens. J. 2015, 15, 4062–4072. [Google Scholar] [CrossRef]
- El-Sheimy, N. Inertial Techniques and INS/DGPS Integration. ENGO 623-Course Lecture; University of Calgary: Calgary, AL, Canada, 2015. [Google Scholar]
- Crossbow Technology Inc. (Milpitas, CA, USA). IMU 440 Series User’s Manual. Document 7430-0131-01 Recision C. 2008). Available online: http://samples.technology-writer.com/NAV440%20User%20Manual.pdf (accessed on 17 September 2015).
- PNI Inc. (Santa Rosa, CA, USA). TCM-5 User Manual. Available online: http://www.tri-m.com/products/trim/spec-sheets/TCM3_TCM5_User_Manual_r12.pdf (accessed on 17 September 2015).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Q.; Zhang, H.; Li, Y.; Li, Z. An Adaptive Low-Cost GNSS/MEMS-IMU Tightly-Coupled Integration System with Aiding Measurement in a GNSS Signal-Challenged Environment. Sensors 2015, 15, 23953-23982. https://doi.org/10.3390/s150923953
Zhou Q, Zhang H, Li Y, Li Z. An Adaptive Low-Cost GNSS/MEMS-IMU Tightly-Coupled Integration System with Aiding Measurement in a GNSS Signal-Challenged Environment. Sensors. 2015; 15(9):23953-23982. https://doi.org/10.3390/s150923953
Chicago/Turabian StyleZhou, Qifan, Hai Zhang, You Li, and Zheng Li. 2015. "An Adaptive Low-Cost GNSS/MEMS-IMU Tightly-Coupled Integration System with Aiding Measurement in a GNSS Signal-Challenged Environment" Sensors 15, no. 9: 23953-23982. https://doi.org/10.3390/s150923953
APA StyleZhou, Q., Zhang, H., Li, Y., & Li, Z. (2015). An Adaptive Low-Cost GNSS/MEMS-IMU Tightly-Coupled Integration System with Aiding Measurement in a GNSS Signal-Challenged Environment. Sensors, 15(9), 23953-23982. https://doi.org/10.3390/s150923953