
Ultrasonic Lateral Displacement Sensor for Health Monitoring in Seismically Isolated Buildings


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
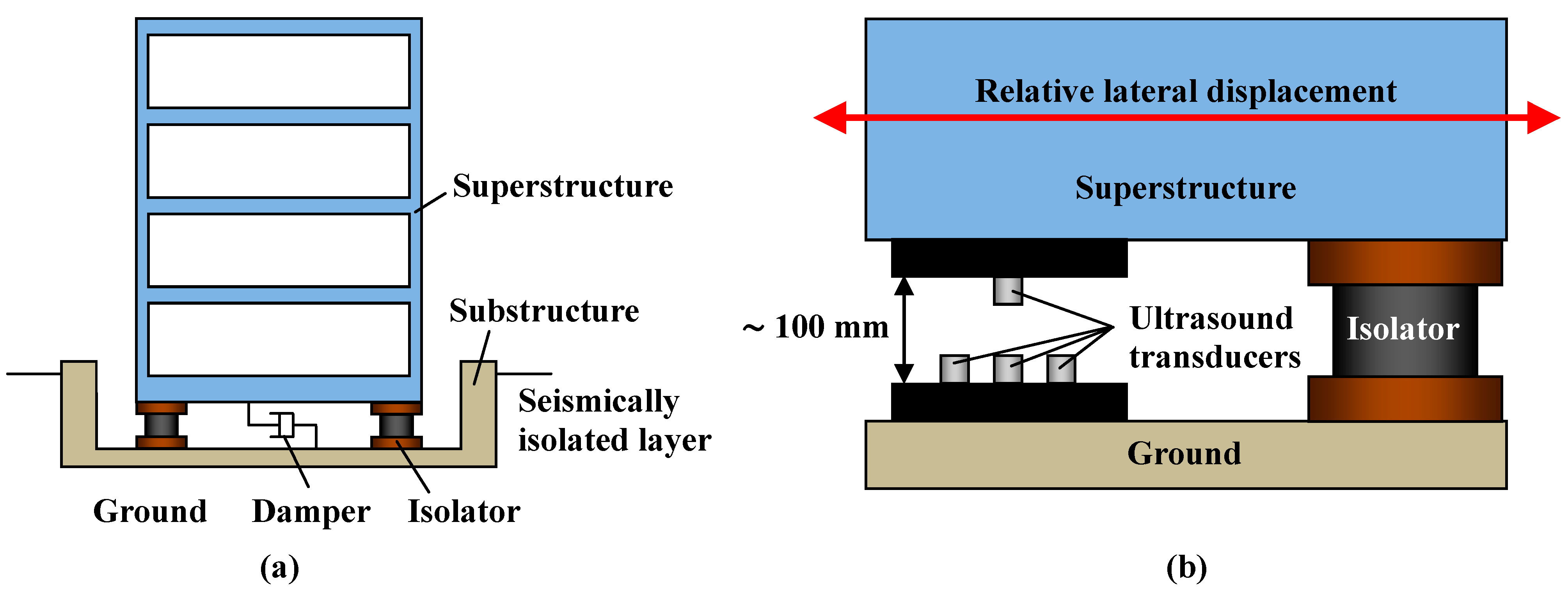
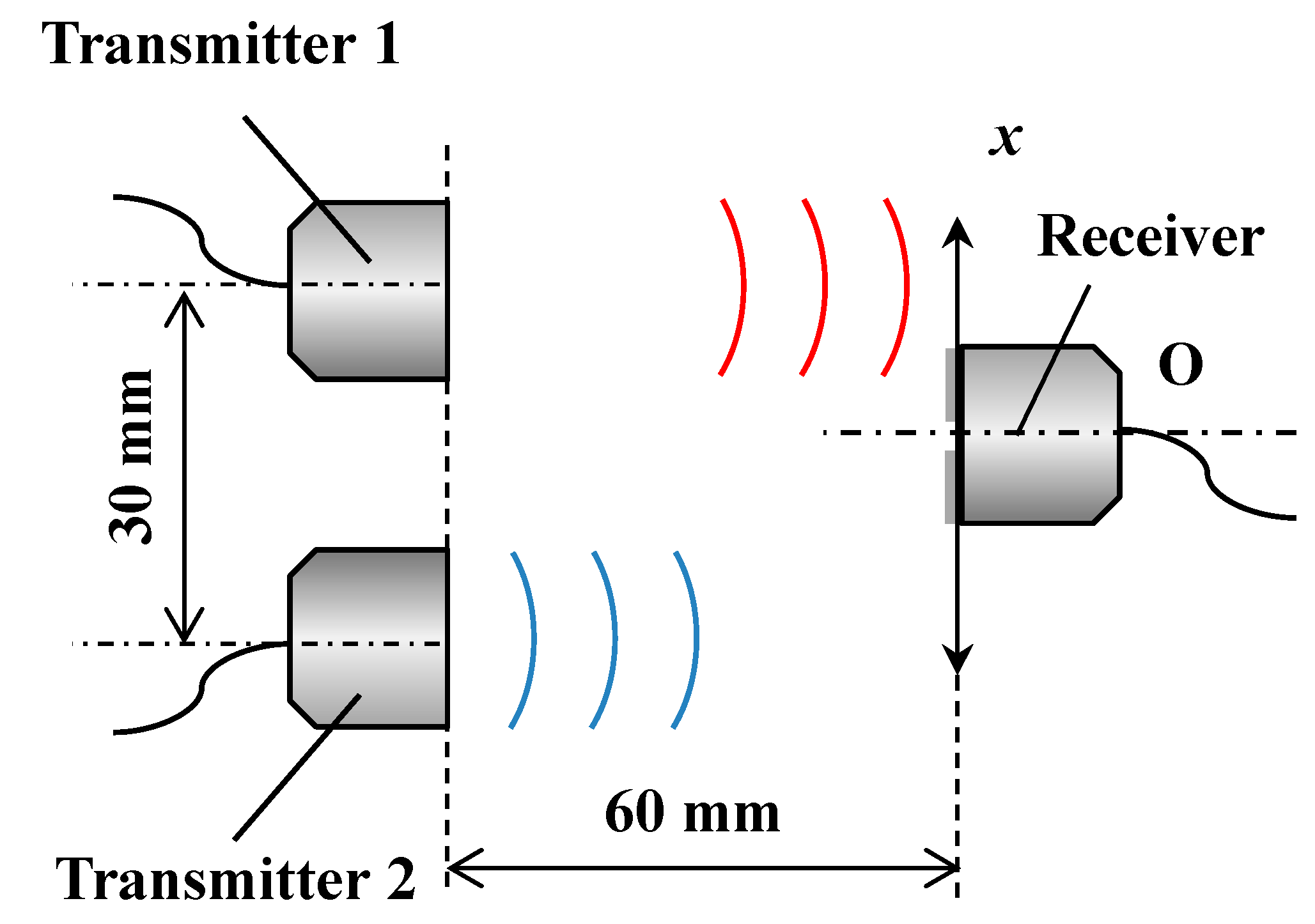
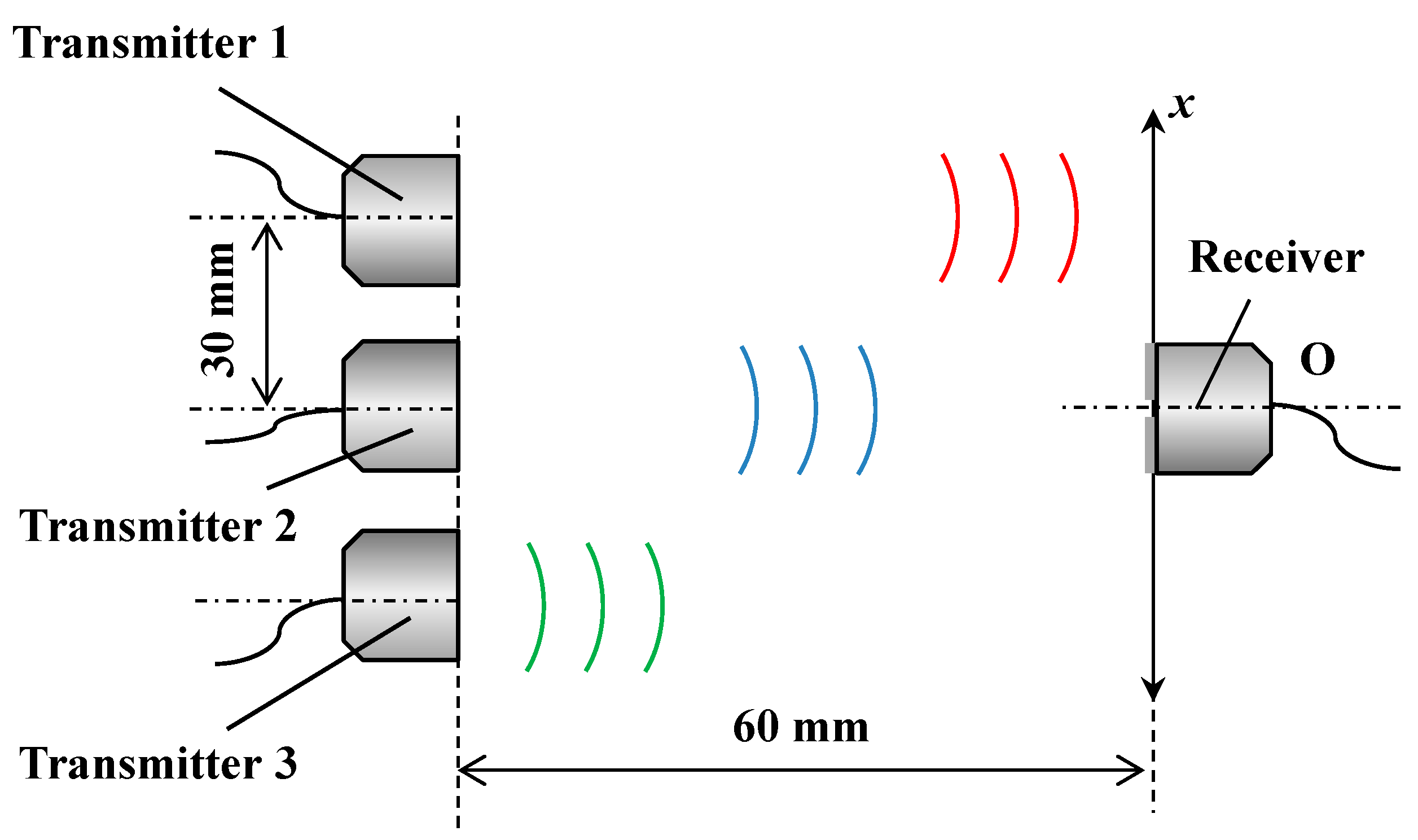
2. Experimental Setup
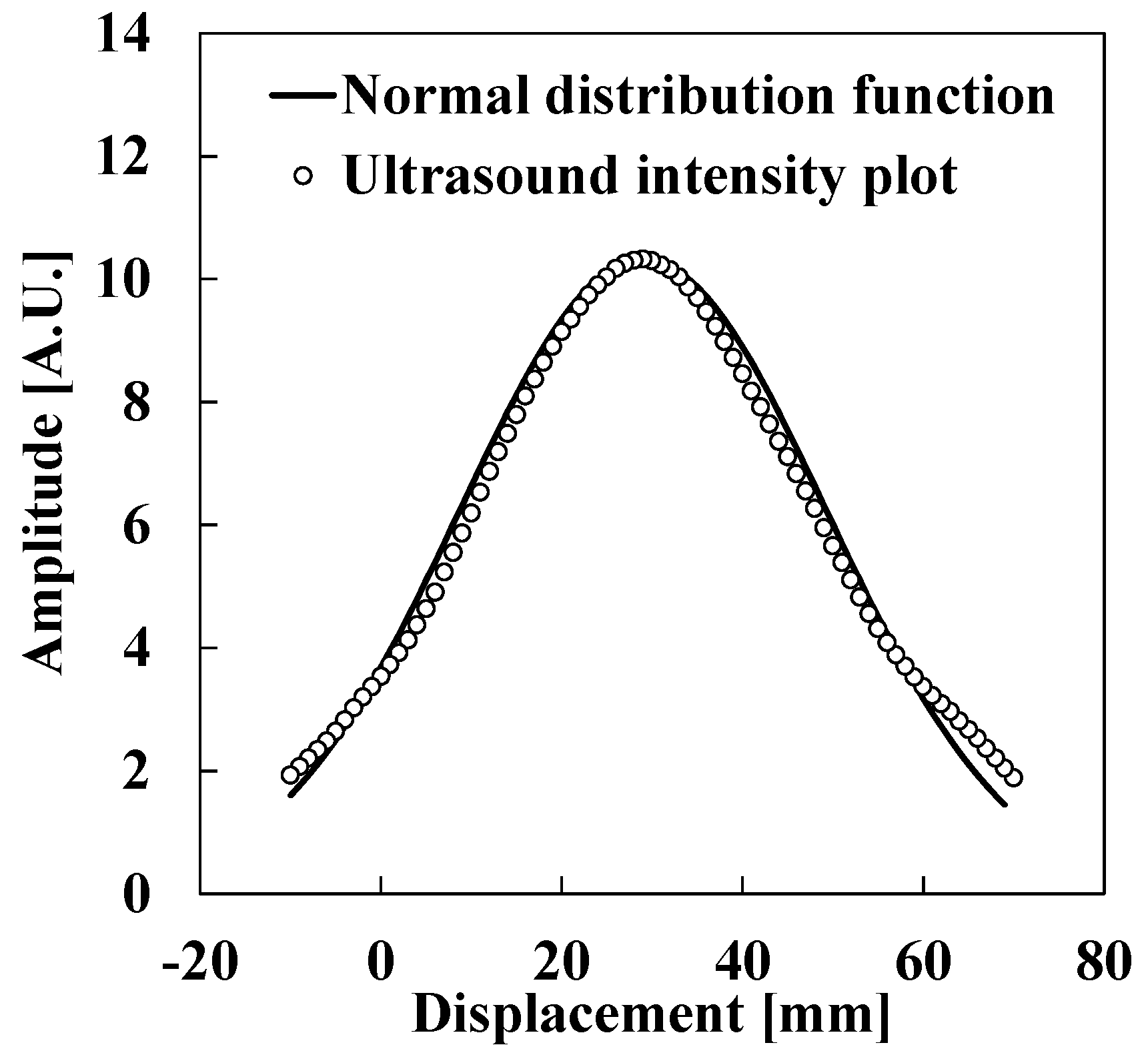
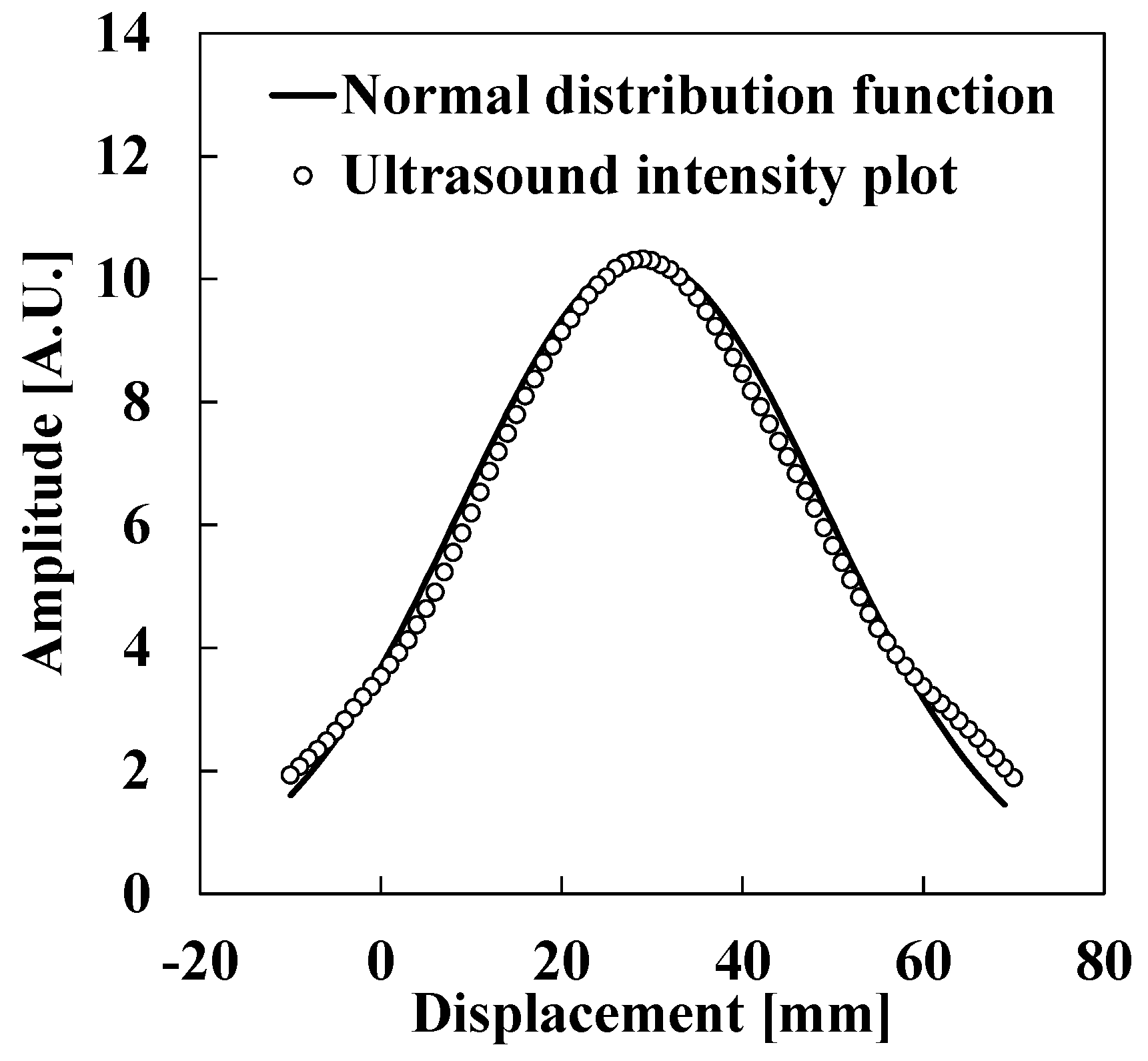
2.1. Ultrasound Intensity Distribution of Air-Coupled Ultrasound Transducer
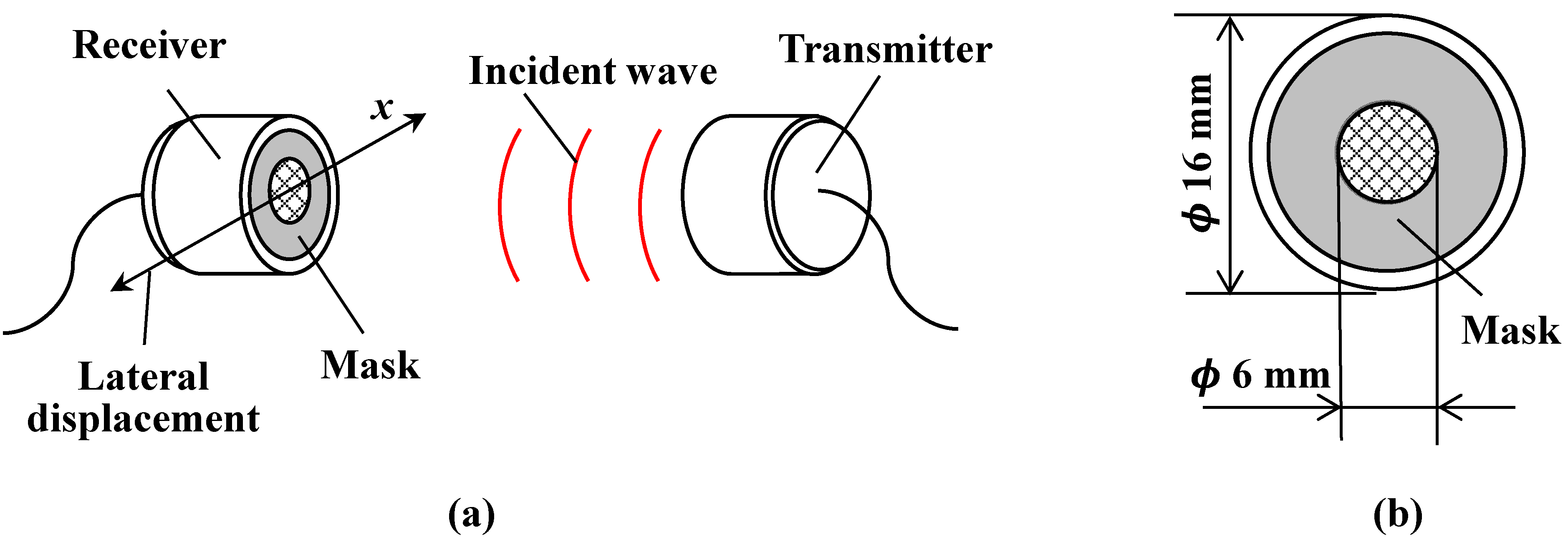
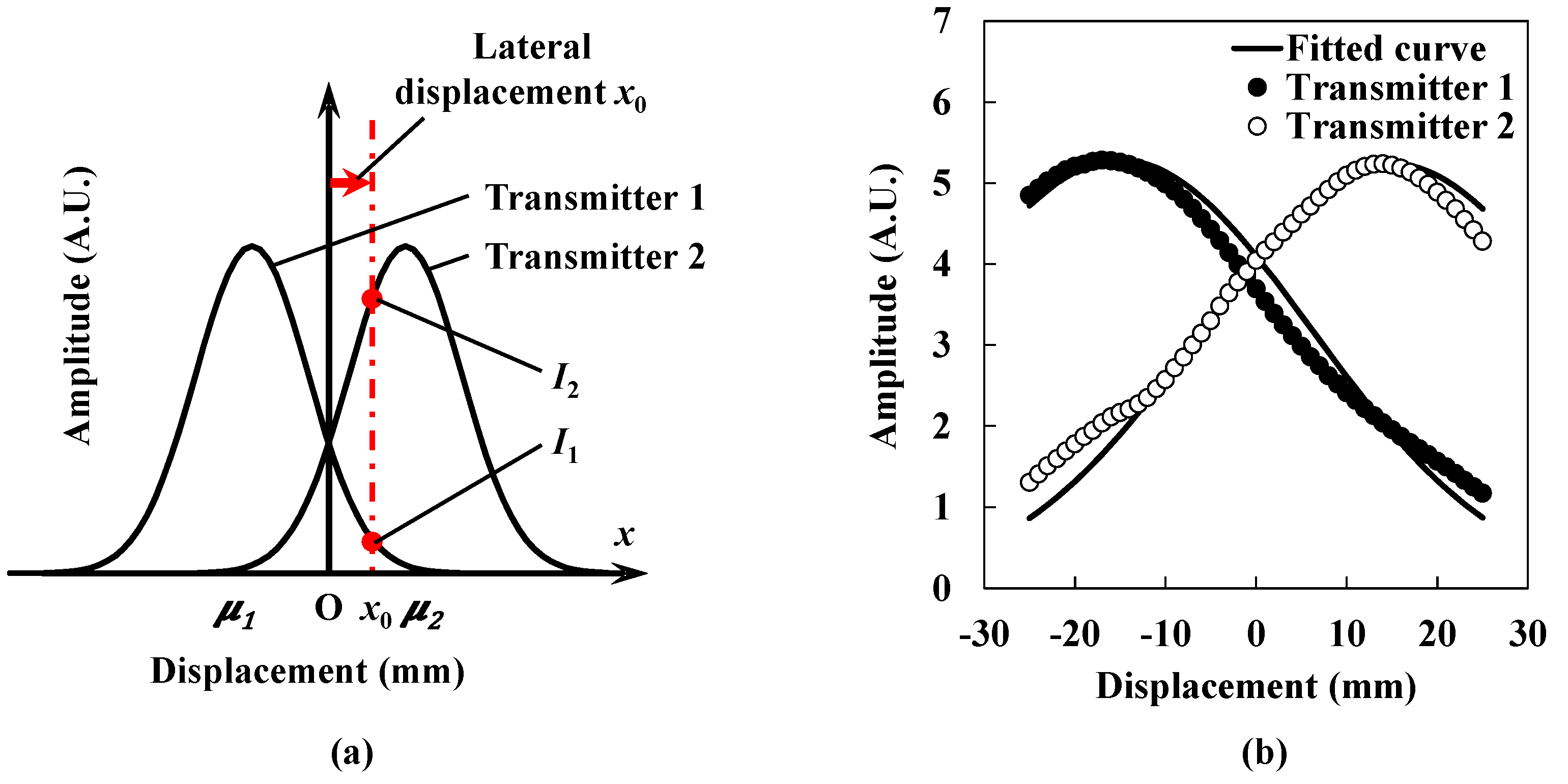
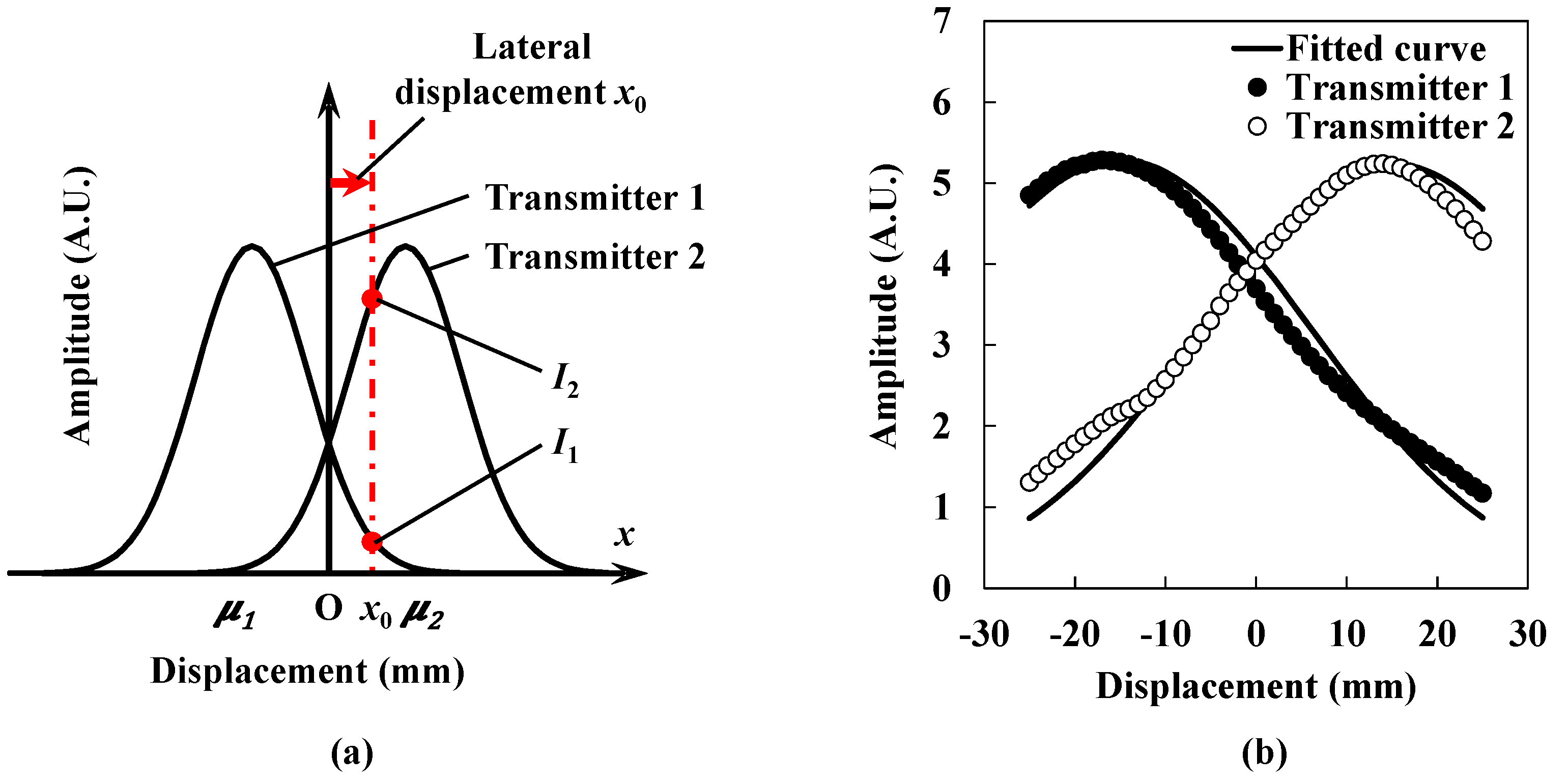
2.2. Measurement Principal for Lateral Displacement Sensing
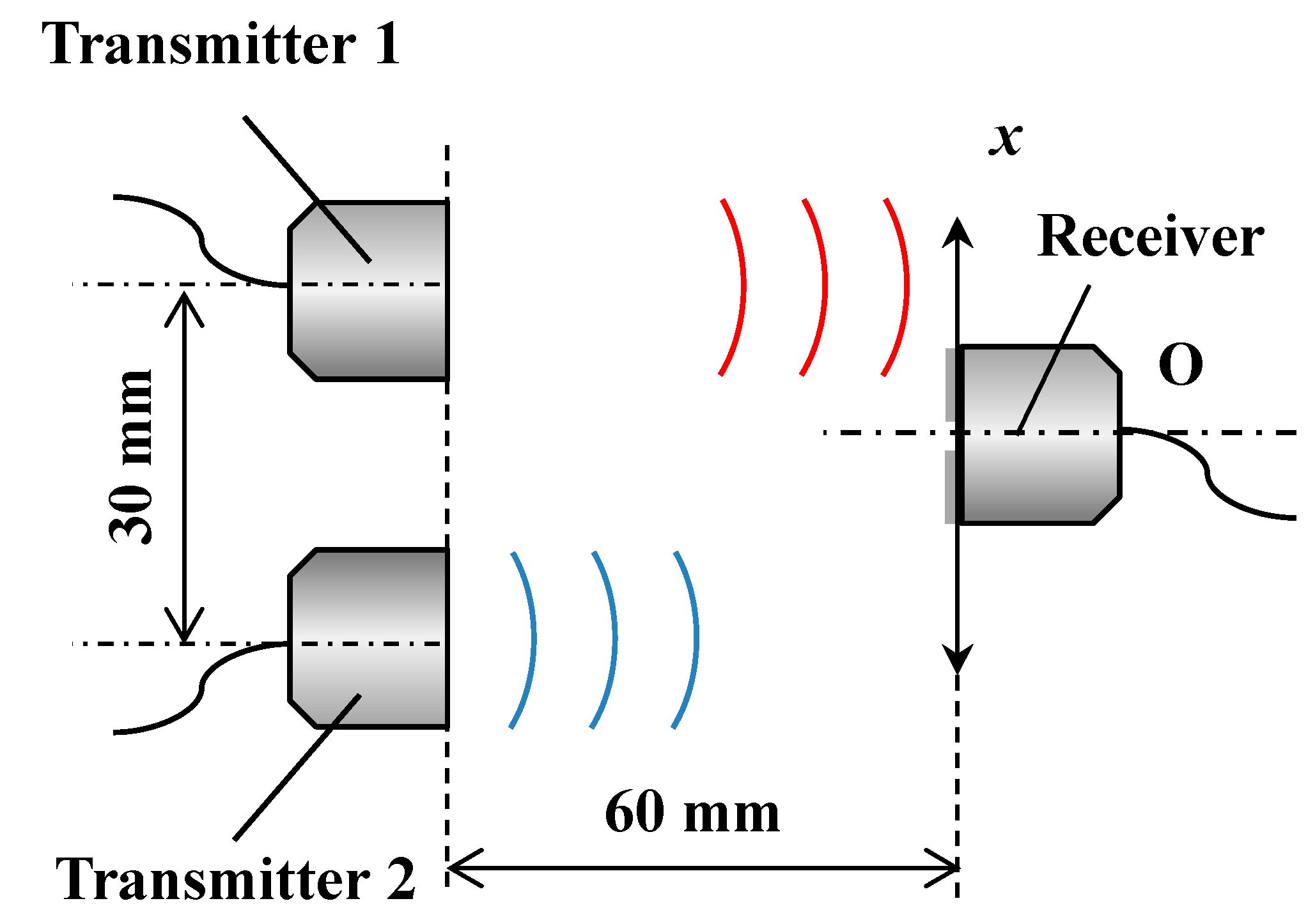
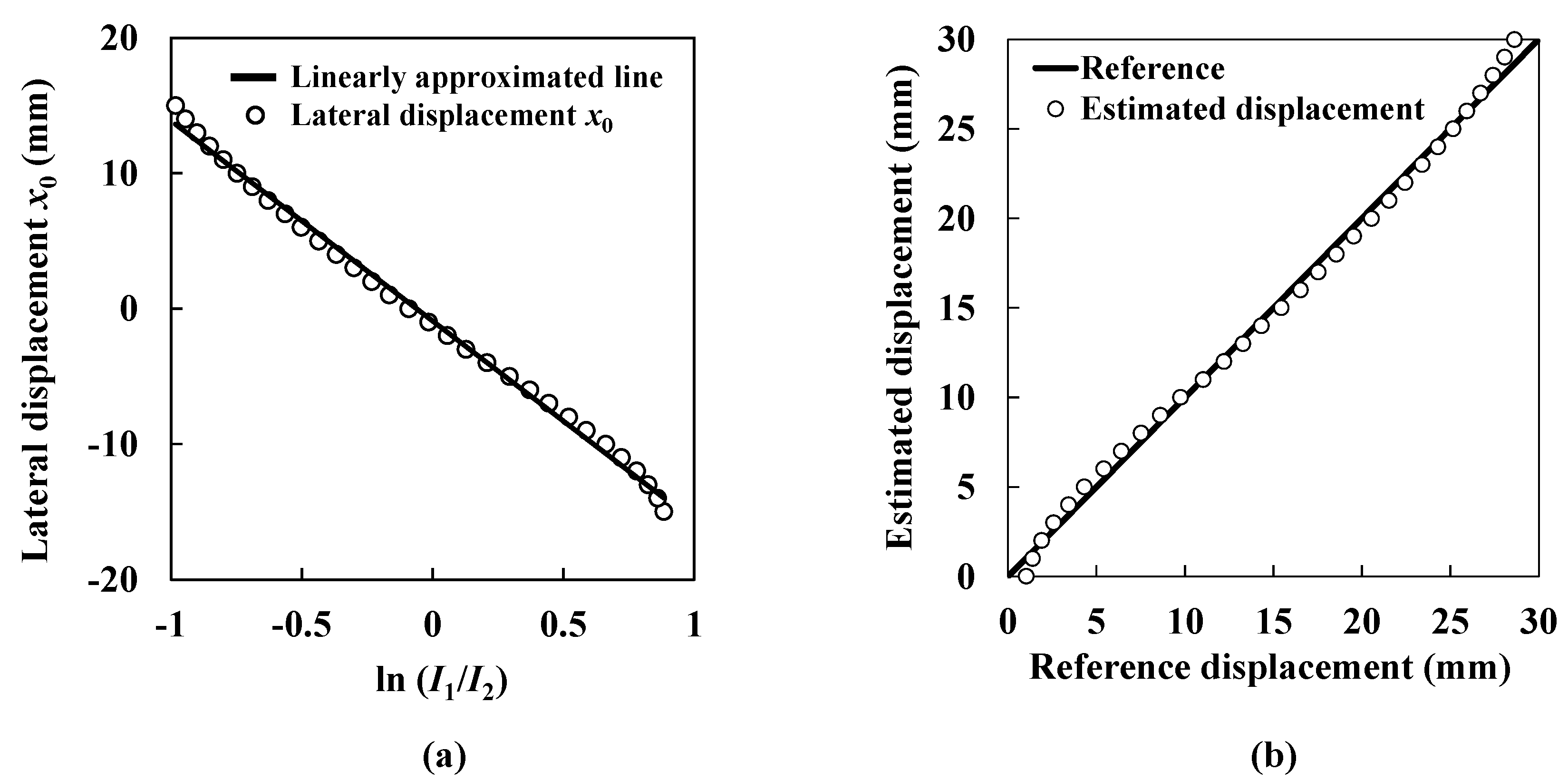
2.3. Measuring Lateral Displacement over a Wide Measurement Range
3. Results and Discussion
3.1. Ultrasound Intensity Distribution of Air-Coupled Ultrasound Transducer
3.2. Measurement Principal for Lateral Displacement Sensing

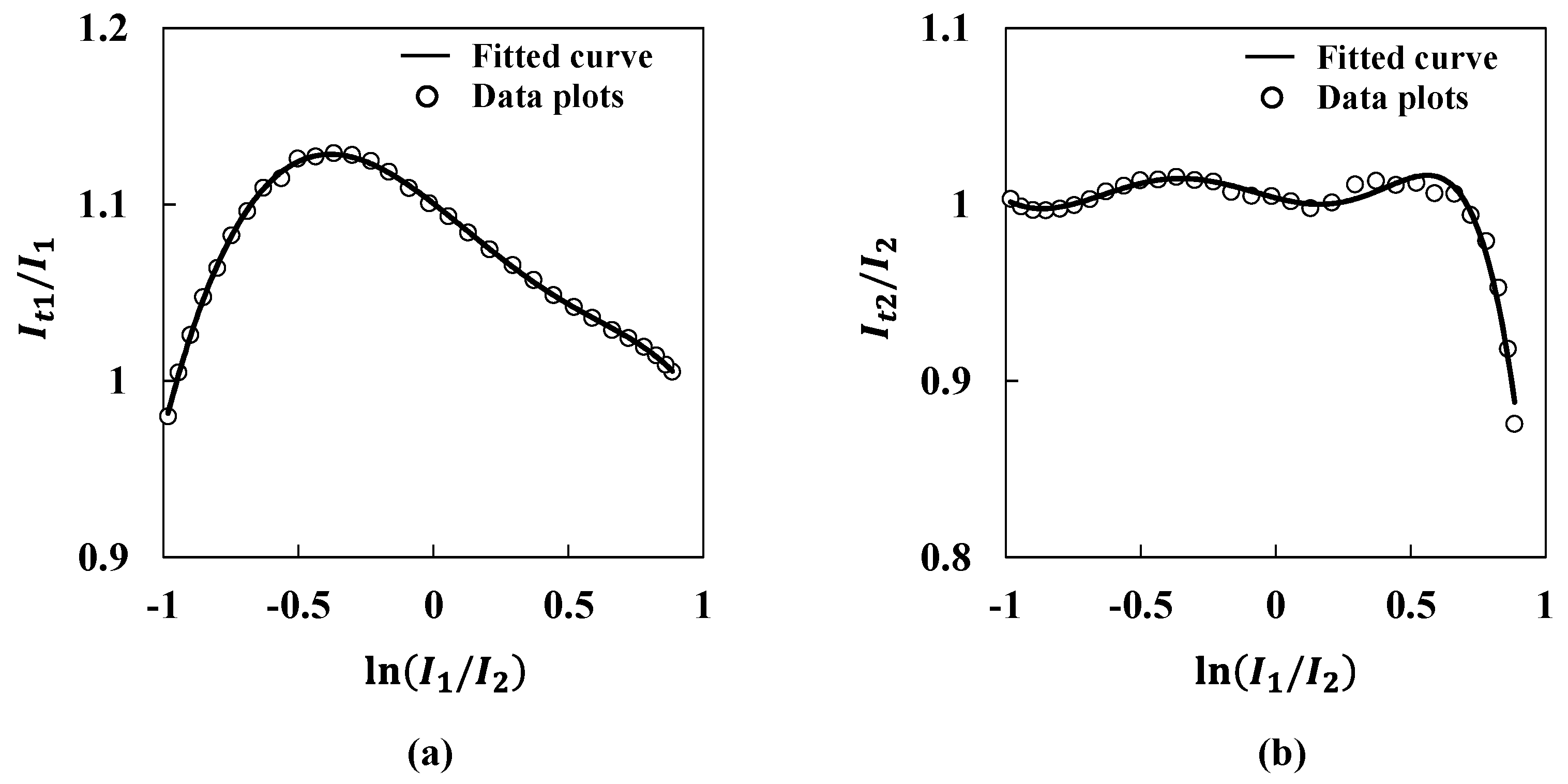

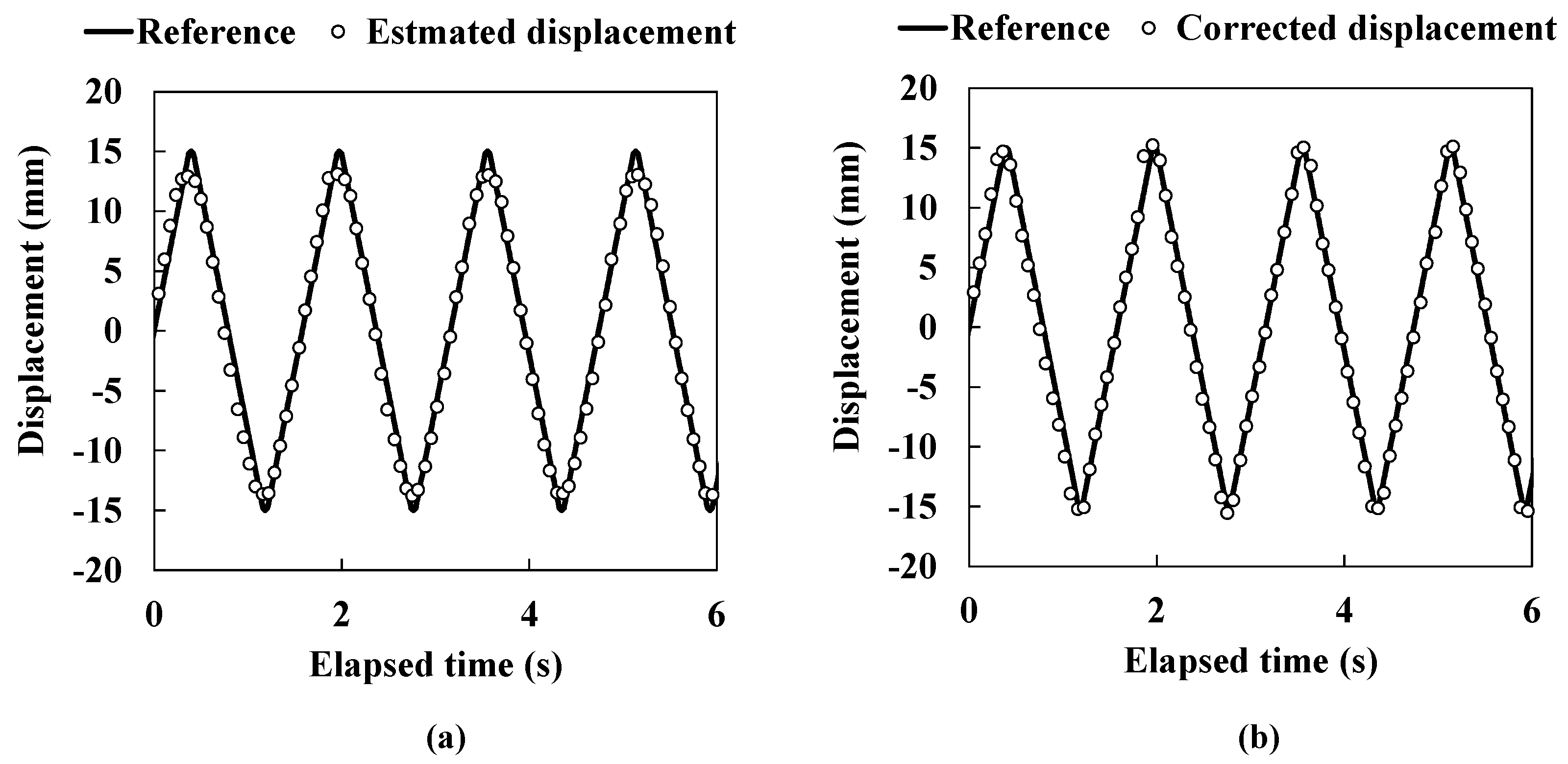
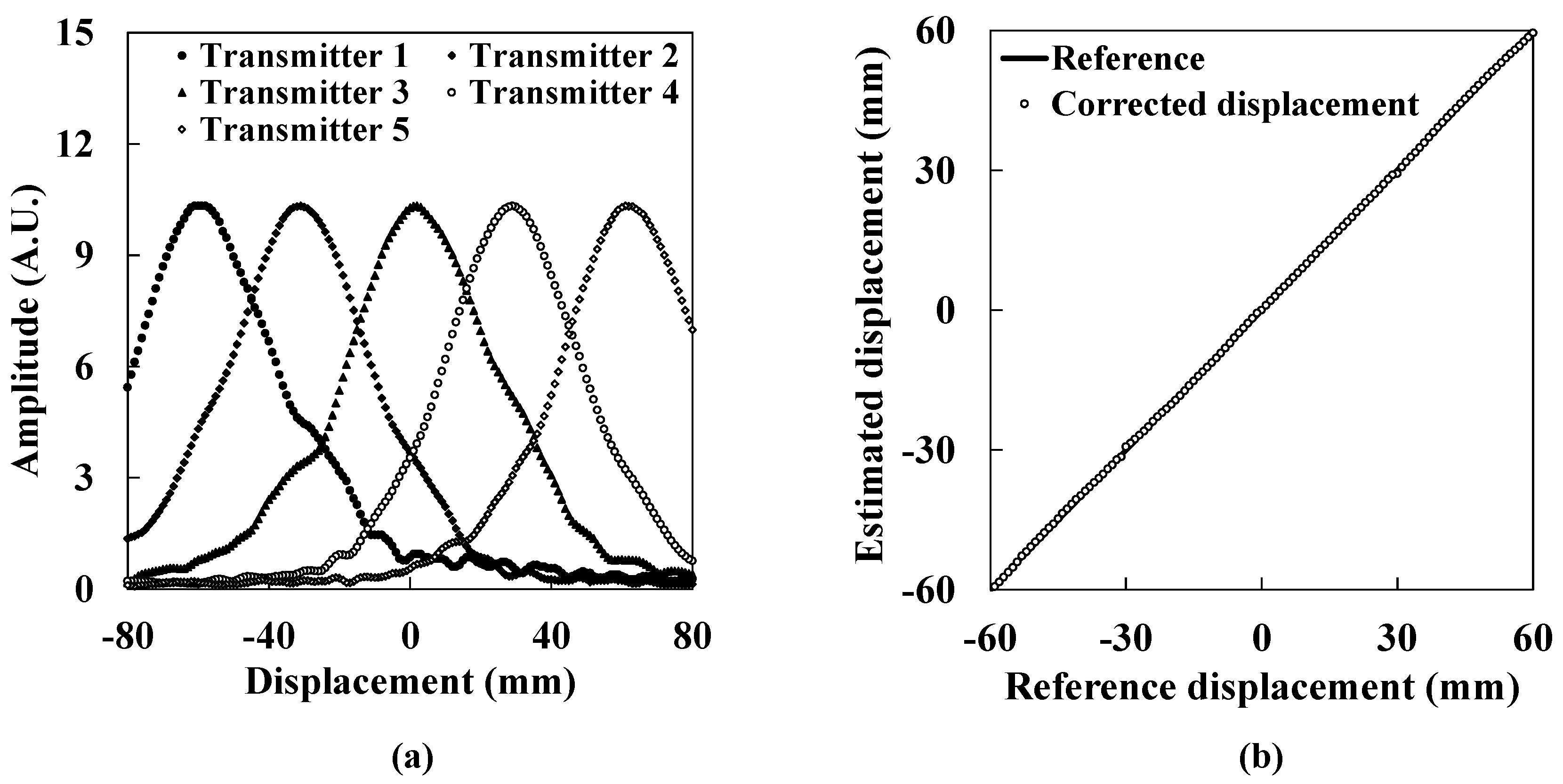
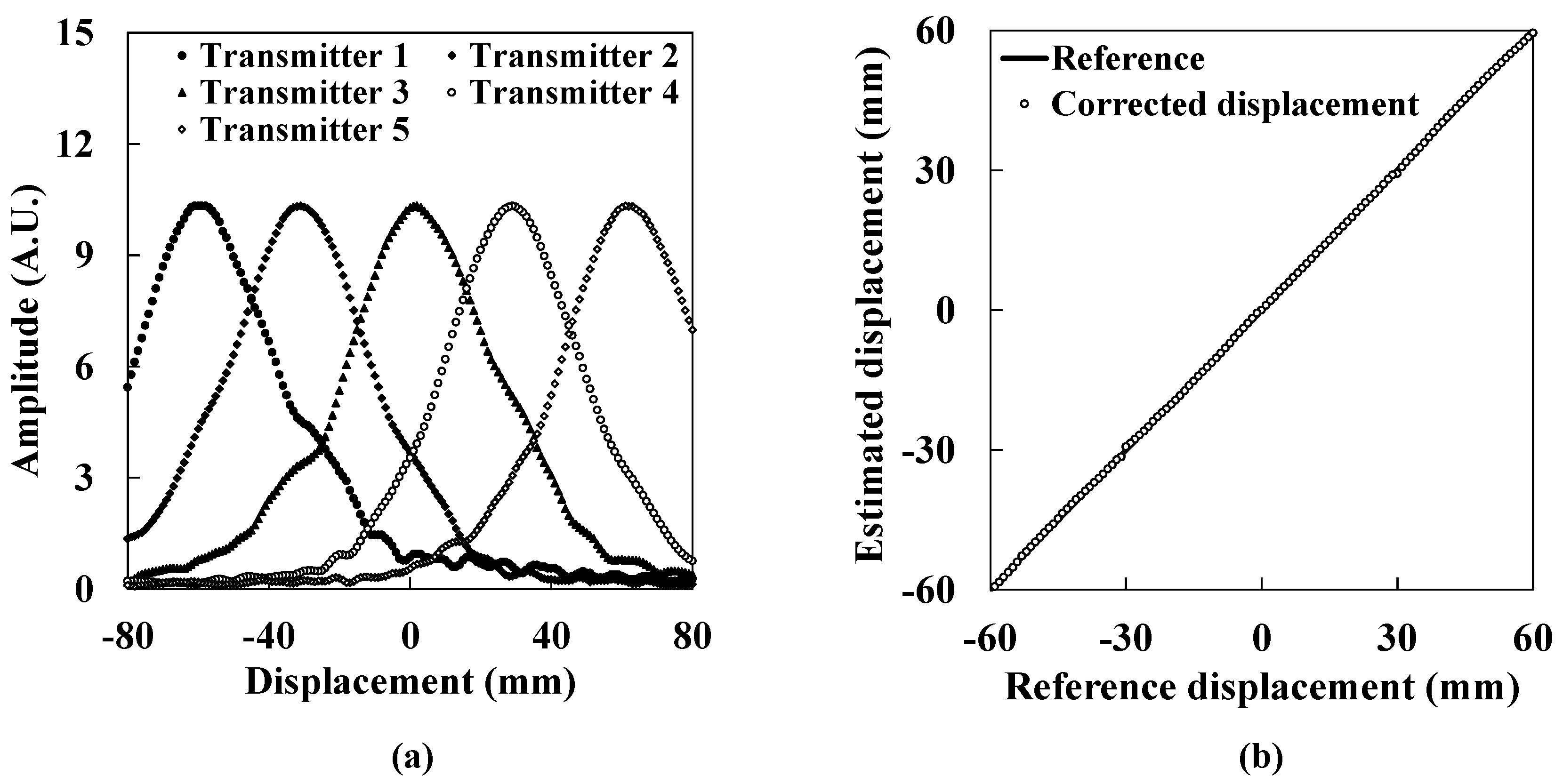
3.3. Measuring Lateral Displacement over a Wide Range
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ariga, T.; Kanno, Y.; Takewaki, I. Resonant behaviour of base-isolated high-rise buildings under long-period ground motions. Struct. Des. Tall Spec. Build. 2006, 15, 325–338. [Google Scholar] [CrossRef]
- Kurata, N.; Kobori, T.; Takahashi, M.; Niwa, N.; Midorikawa, H. Actual seismic response controlled building with semi-active damper system. Earthq. Eng. Struct. Dyn. 1999, 28, 1427–1447. [Google Scholar] [CrossRef]
- Islam, A.B.M.S.; Jameel, M.; Jumaat, M.Z. Seismic isolation in buildings to be a practical reality: behavior of structural and installation technique. J. Eng. Technol. Res. 2011, 3, 99–117. [Google Scholar]
- Ramirez, O.M.; Constantinou, M.C.; Whittaker, A.S.; Kircher, C.A.; Chrysostomou, C.Z. Elastic and inelastic seismic response of buildings with damping system. Earthq. Spectra 2002, 18, 531–547. [Google Scholar] [CrossRef]
- Heaton, T.H.; Hall, J.F.; Wald, D.J.; Halling, M.W. Response of high-rise and base-isolated buildings to a hypothetical Mw 7.0 blind thrust earthquake. Science 1995, 267, 206–211. [Google Scholar] [CrossRef] [PubMed]
- Ventura, C.E.; Finn, W.D.L.; Lord, J.-F.; Fujita, N. Dynamic characteristics of a base isolated building from ambient vibration measurements and low level earthquake shaking. Soil Dyn. Earthq. Eng. 2003, 23, 313–322. [Google Scholar] [CrossRef]
- Kani, N.; Takayama, M.; Wada, A. Performance of seismically isolated buildings in Japan—observation records and vibration perception by people in buildings with seismic isolation. In Proceedings of the 8th U.S. National Conference on Earthquake Engineering, San Francisco, CA, USA, 18–22 April 2006.
- Moroni, M.O.; Sarrazin, M.; Boroschek, R. Experiments on a Base-Isolated Building in Santiago, Chile. Eng. Struct. 1998, 20, 720–725. [Google Scholar] [CrossRef]
- Chang, P.C.; Flatau, A.; Liu, S.C. Review paper: health monitoring of civil infrastructure. Struct. Health Monit. 2003, 2, 257–267. [Google Scholar] [CrossRef]
- Miyashita, T.; Nagai, M. Vibration-based structural health monitoring for bridges using laser Doppler vibrometers and MEMS-based technologies. Int. J. Steel Struct. 2008, 8, 325–331. [Google Scholar]
- Nishitani, A.; Matsui, C.; Hara, Y.; Xiang, P.; Nitta, Y.; Hatada, T.; Katamura, R.; Matsuya, I.; Tanii, T. Drift displacement data based estimation of cumulative plastic deformation ratios for buildings. Smart Struct. Syst. 2015, 15, 881–896. [Google Scholar] [CrossRef]
- Nagayama, T.; Abe, M.; Fujino, Y.; Asce, M.; Ikeda, K. Structural identification of a nonproportionally damped system and its application to a full-scale suspension bridge. J. Struct. Eng. 2005, 131, 1536–1545. [Google Scholar] [CrossRef]
- Nitta, Y.; Nishitani, A.; Spencer, B.F., Jr. Semiactive control strategy for smart base isolation utilizing absolute acceleration information. Struct. Control Health Monit. 2005, 13, 649–659. [Google Scholar] [CrossRef]
- Park, J.W.; Sim, S.H.; Jung, H.J.; Spencer, B.F., Jr. Development of a wireless displacement measurement system using acceleration responses. Sensors 2013, 13, 8377–8392. [Google Scholar] [CrossRef] [PubMed]
- Park, H.S.; Park, K.; Kim, Y.; Choi, S.W. Deformation monitoring of a building structure using a motion capture system. IEEE/ASME Trans. Mechatron. 2014, PP, 1–9. [Google Scholar] [CrossRef]
- Matsuya, I.; Tomishi, R.; Sato, M.; Kanekawa, K.; Nitta, Y.; Takahashi, M.; Miura, S.; Suzuki, Y.; Hatada, T.; Katamura, R.; et al. Development of lateral-displacement sensor for real-time detection of structural damage. IEEJ Trans. Electr. Electron. Eng. 2011, 6, 266–272. [Google Scholar] [CrossRef]
- Matsuya, I.; Katamura, R.; Sato, M.; Iba, M.; Kondo, H.; Kanekawa, K.; Takahashi, M.; Hatada, T.; Nitta, Y.; Tanii, T.; et al. Measuring relative-story displacement and local inclination angle using multiple position-sensitive detectors. Sensors 2010, 10, 9687–9697. [Google Scholar] [CrossRef] [PubMed]
- Chan, T.H.T. Vertical displacement measurements for bridges using optical fiber sensors and CCD cameras—a preliminary study. Struct. Health Monit. 2009, 8, 243–249. [Google Scholar] [CrossRef]
- Sukumana, D.D.; Ihara, I. Application of an air-coupled ultrasound to non-contact surface roughness evaluation. Jpn. J. Appl. Phys. 2005, 44, 4417–4420. [Google Scholar] [CrossRef]
- Matsuya, I.; Matsumoto, F.; Ihara, I. Experimental study on lateral displacement measurement using air-coupled ultrasound transducers. Mechan. Eng. J. 2015, 2. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Matsuya, I.; Matsumoto, F.; Ihara, I. Ultrasonic Lateral Displacement Sensor for Health Monitoring in Seismically Isolated Buildings. Sensors 2015, 15, 17000-17012. https://doi.org/10.3390/s150717000
Matsuya I, Matsumoto F, Ihara I. Ultrasonic Lateral Displacement Sensor for Health Monitoring in Seismically Isolated Buildings. Sensors. 2015; 15(7):17000-17012. https://doi.org/10.3390/s150717000
Chicago/Turabian StyleMatsuya, Iwao, Fumiya Matsumoto, and Ikuo Ihara. 2015. "Ultrasonic Lateral Displacement Sensor for Health Monitoring in Seismically Isolated Buildings" Sensors 15, no. 7: 17000-17012. https://doi.org/10.3390/s150717000
APA StyleMatsuya, I., Matsumoto, F., & Ihara, I. (2015). Ultrasonic Lateral Displacement Sensor for Health Monitoring in Seismically Isolated Buildings. Sensors, 15(7), 17000-17012. https://doi.org/10.3390/s150717000