1. Introduction
As green travel is becoming popular with the public, more and more people are choosing rapid transit systems to travel in metropolis. People have high requirements for riding comfort in rapid transit systems. Riding comfort can be influenced by many factors, such as acceleration performance, interior space [
1], noise and vibration [
2], ventilation [
3], temperature [
4], seat design [
5] and passenger services [
6]. Longitudinal acceleration is one of the essential factors that effects the riding comfort of trains [
7]. Longitudinal acceleration comfort has been widely considered in the areas of vehicle design, such as adaptive cruise control design [
8] and braking system design [
9].
Longitudinal acceleration comfort research has been carried out since the 1930s [
10]. So far, some relevant standards, such as TB/T2370 and ISO 2631-1, have been released. The standards stipulate the acceptable maximum acceleration value of the traction and braking system of the train [
11], which can be used as the vehicle design basis. However, the value is a minimum requirement for the ever-growing comfort requirements of passengers. Hence, further research was promoted to investigate the longitudinal acceleration comfort of passengers. For example, Feng
et al. investigated the longitudinal acceleration comfort of passengers in different resting and reading postures [
12].
Longitudinal acceleration comfort can be measured by objective or subjective approaches [
10]. The subjective approach use questionnaires. Selected participants, who are placed in vehicles or laboratory devices, are asked to write down their sensations about various motions on a questionnaire after being exposed to the motion. Since the sensation a participant describes may not indicate how he behaves, subjective approaches need to recruit enough participants to obtain statistically feasible results. Objective approaches use some physical quantity to directly evaluate the comfort level. An objective approach has the advantage of calculating the result through the single measurement of the physical quantity. The physical quantities recently used to measure longitudinal acceleration comfort include acceleration and balance retention [
10]. Most tests use acceleration as the physical quantity, as it can be acquired through accelerometers [
13] or the accelerometer in a mobile phone [
14].
For security and efficiency reasons, researchers usually prefer using laboratory devices to using real vehicles, for example, Fard discussed the effects of seated structural dynamics on ride comfort criteria using a vibration simulation system [
15]. With the development of simulation technology, a motion simulation system now can convey the effect of gravitational forces and cues participants experience during kinematic changes in acceleration. Motion simulation systems also have disadvantages. The motion simulation systems simulate acceleration by tilting forward and backward. It should be noted here that the acceleration sensor can measure the acceleration of the simulation system, but cannot measure the acceleration of the simulated train. Hence, there’s impossible to measure the acceleration of the simulated train directly with an accelerometer.
It is hard for a standing passenger to maintain his balance because the center of his mass is higher than the one of a seated passenger in a rapid transit train. As the train accelerates or decelerates, the passenger must to hold on to a handrail and exert significant forces to maintain his balance. Hence, the changes of the grip force are supposed to be a feasible criterion to calculate the longitudinal acceleration comfort of the passengers. In order to objectively evaluate the longitudinal acceleration comfort of passengers in a real train or on a motion simulation system, the novel idea of using pressure map systems to evaluate the longitudinal acceleration comfort is presented in the this paper.
A pressure map is a system for assessing pressure distribution. The system includes a thin sensor mat which can be placed on a working surface. The system also includes a computer used to process the sensor data. When something is put on the working surface, a map of pressure data will be recorded by the system for subsequent further analysis. Pressure map systems are widely used in the area of clinical medicine [
16], product design [
17], manufacturing [
18], ergonomics [
19], sport [
20], among others.
In the present study, a motion simulation system was used to simulate the working conditions of a rapid transit train, and a pressure map system was used to record the changes of hand grip force under different working conditions. The goal of the study was to determine the correlation between comfort score and hand grip force to extend the use of the pressure sensors.
2. Methodology
2.1. Simulation Setup
We built a motion simulation system, which was composed of a motion system, a standing platform and a virtual simulation system, to simulate the motion of a passenger’s standing situation.
2.1.1 Motion System
A three axis electric motion system (MSE 710S-3, MSE Simulation Ltd.) was used to generate the pulse. The system (see
Figure 1) had three electric motors, which could work together to drive the upper frame of the system to tilt forward and backward, tilt side to side and move up and down. The ranges of the pitching, rolling and heaving motions of the system were −15° to 15°, −15° to 15° and −5 cm to 5 cm, respectively. The response speeds of the pitching, rolling and heaving motion of the system were 60°/s, 60°/s and 33 cm/s, respectively.
Figure 1.
The three axis motion system.
Figure 1.
The three axis motion system.
The motion system cannot simulate a long acceleration process due to its space limitations. Hence, the constantly acceleration was simulated by tilting participant backwards and using the gravity vector as a replacement for the forward acceleration force. As the tilting could cause the movement along the vertical axis (Z axis), a Z axis compensation based algorithm was designed and used to drive the motion system. The participants’ standing vestibular heights were used as the input parameter of the motion system.
2.1.3. Virtual Simulation
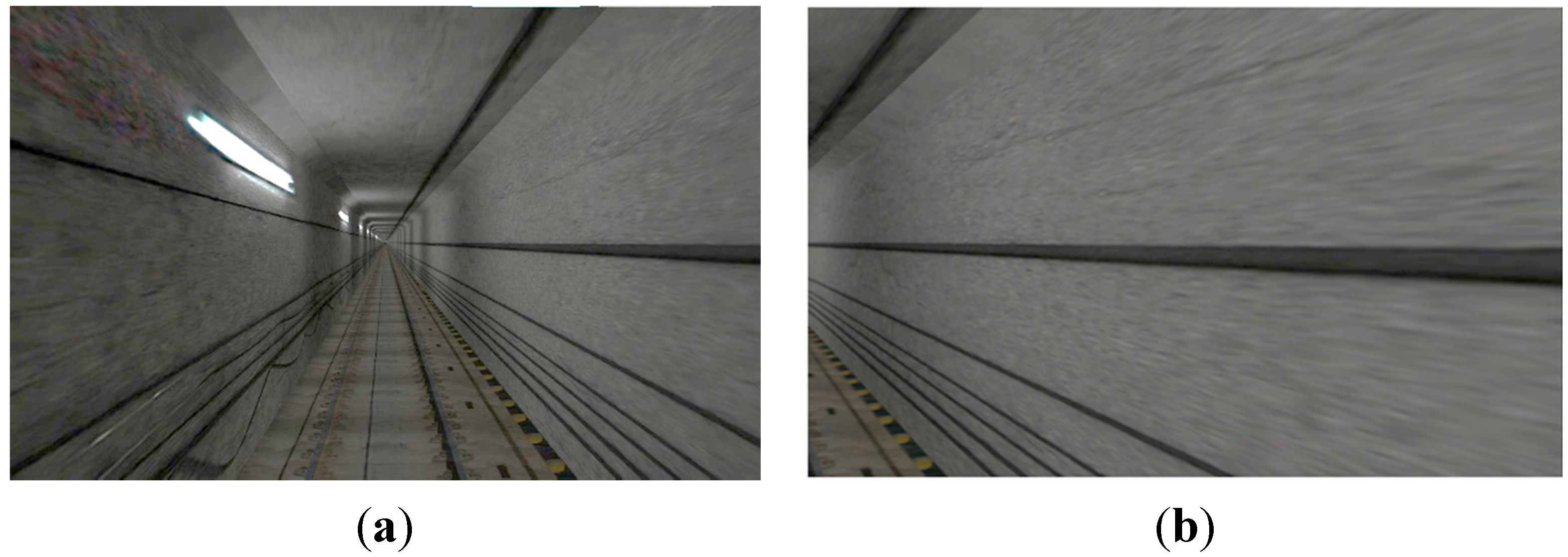
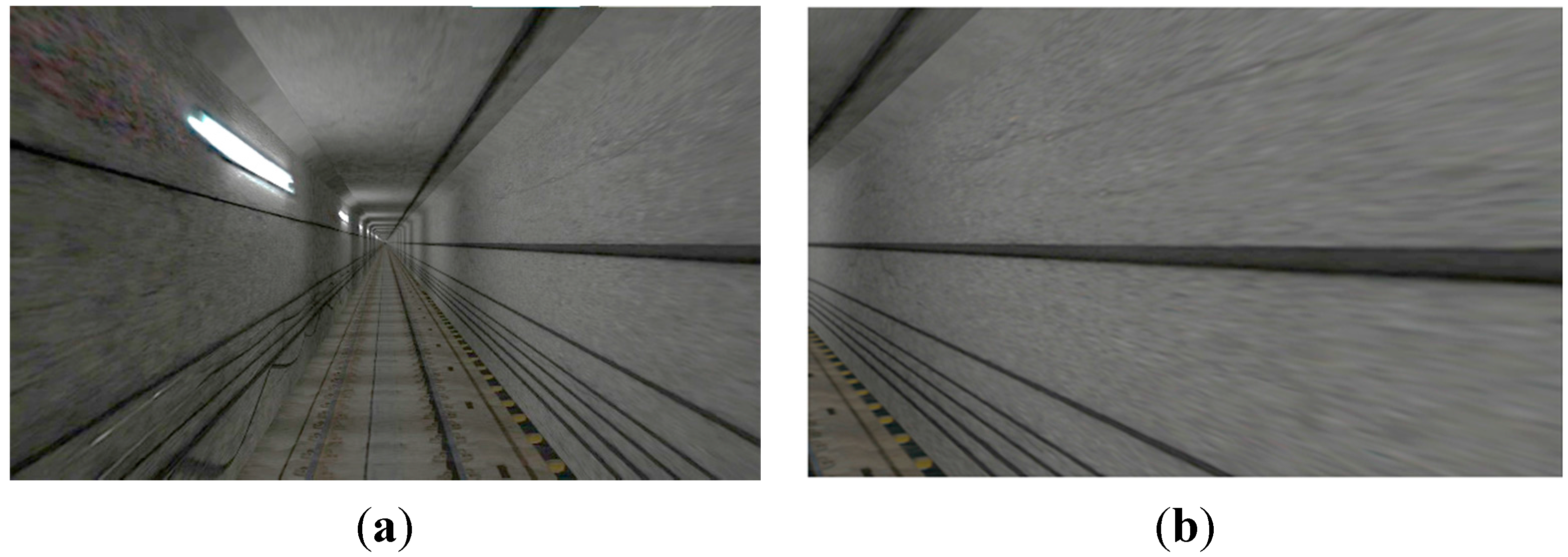
A virtual simulation system was used to improve the user immersion of simulation scenarios. The virtual simulation system included visual simulation and audio simulation. Computer generated imagery (CGI) was used to create the visual scene. The scene included all the rapid transit system elements, such as tracks and subsidiary facilities of the rapid transit system, and landscapes on both track sides. Examples of the visual simulation scene for the experiment scenarios are shown in
Figure 3.
Figure 3.
Examples of visual simulation scene: (a) Front view; (b) Side view.
Figure 3.
Examples of visual simulation scene: (a) Front view; (b) Side view.
An audio simulation system was used to generate the sound of the train running, including the track noises, braking noises, among others.
A head mount display (HMD, Virtual Research V8, Aptos, CA, USA) was used as the visual and aural display. The HMD (see
Figure 4) had dual 1.3″ diagonal active matrix liquid crystal displays with resolution of 640 pixels in width and 480 pixels in height. The field of view of the HMD was 60° diagonal.
Figure 4.
V8 head mount display.
Figure 4.
V8 head mount display.
2.2. Participants
In total fifteen participants were recruited from students in Beijing Jiaotong University. All participants were male, with an average age of 23.3. The participants were all right-handed. The stature of the participants ranged from 1650 mm to 1870 mm (average stature, 1752 mm. Participants were ask to avoid strenuous exercise or physical activity for 24 h before the experiment, to preclude possible variations in motion sensation. For safety, participants with high blood pressure, heart, back or neck problems, motion sickness were excluded from the study. All the participants had previous experience of taking rapid transit trains. The participants were able to understand the test procedures.
2.3. Apparatus
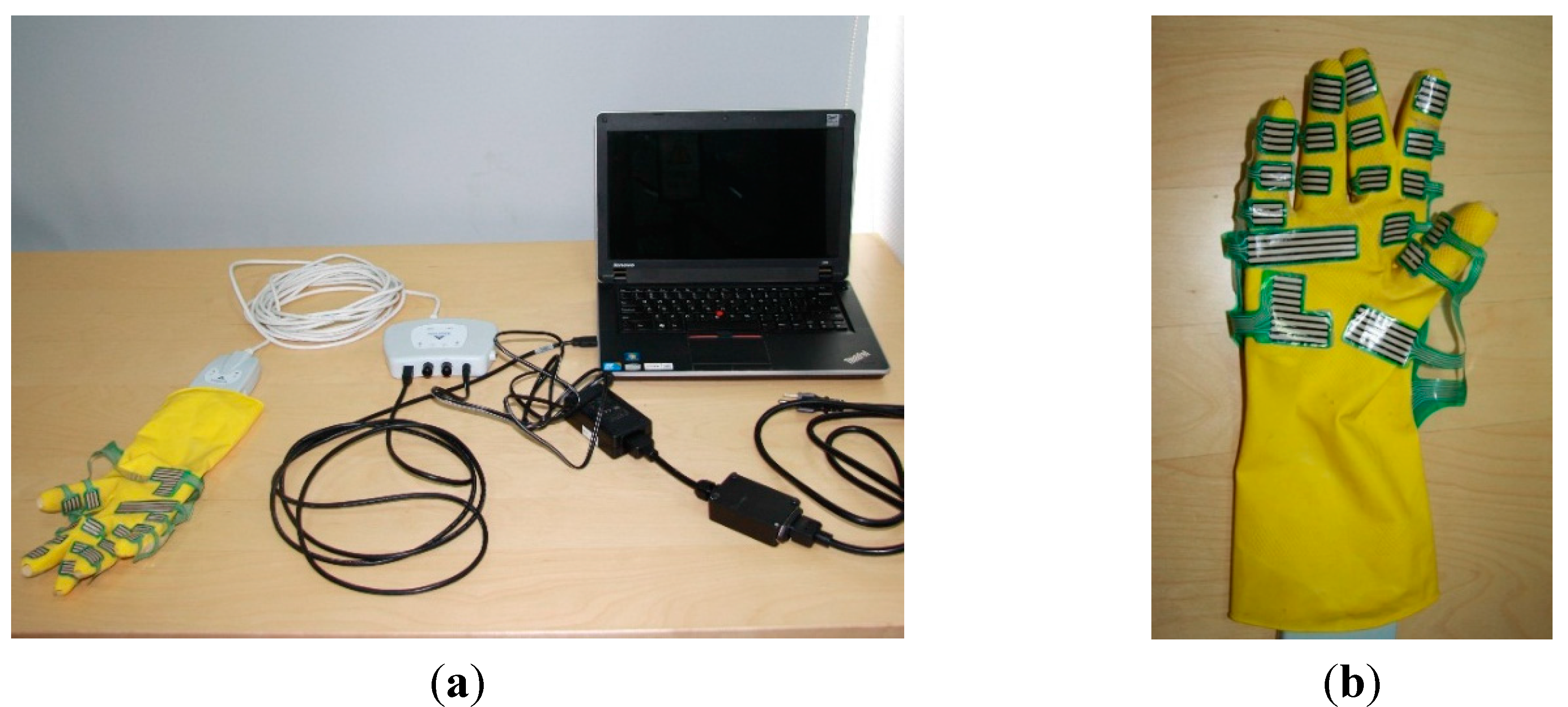
A Tekscan (South Boston, MA, USA) grip pressure mapping system (see
Figure 5a) was used to gather the hand grip forces of participants. The system was composed of a Tekscan pressure mapping sensor, a VersaTek cuff and a VersaTek hub. The cuff connected to the sensor to gather, process and send data to a computer via the hub. The properties of the sensor (#4256E) are described in
Table 1. The scan rate of the system was up to 750 Hz. For convenience, the sensor was stuck on a right hand rubber glove (see
Figure 5b).
Table 1.
Properties of the pressure sensor.
Table 1.
Properties of the pressure sensor.
| Name | Value |
|---|
| Accuracy | Better than ±10% |
| Linearity | <±3% |
| Repeatability | <±3.5% |
| Hysteresis | <4/5% |
| Drift per log time | <5% |
| Lag Time | 5 µs |
| Spatial Resolution | As fine as 0.6 mm × 0.6 mm |
| Thinness | 0.1 mm |
| Pressure range | 0–345 kPa |
Figure 5.
(a) Tekscan grip pressure mapping system; (b) Sensor mounted on a right hand rubber glove.
Figure 5.
(a) Tekscan grip pressure mapping system; (b) Sensor mounted on a right hand rubber glove.
2.4. Experimental Design
We proposed a two-stage experimental designs which allow for early stopping with a negative result of the first-stage experiment.
2.4.1. Stage One
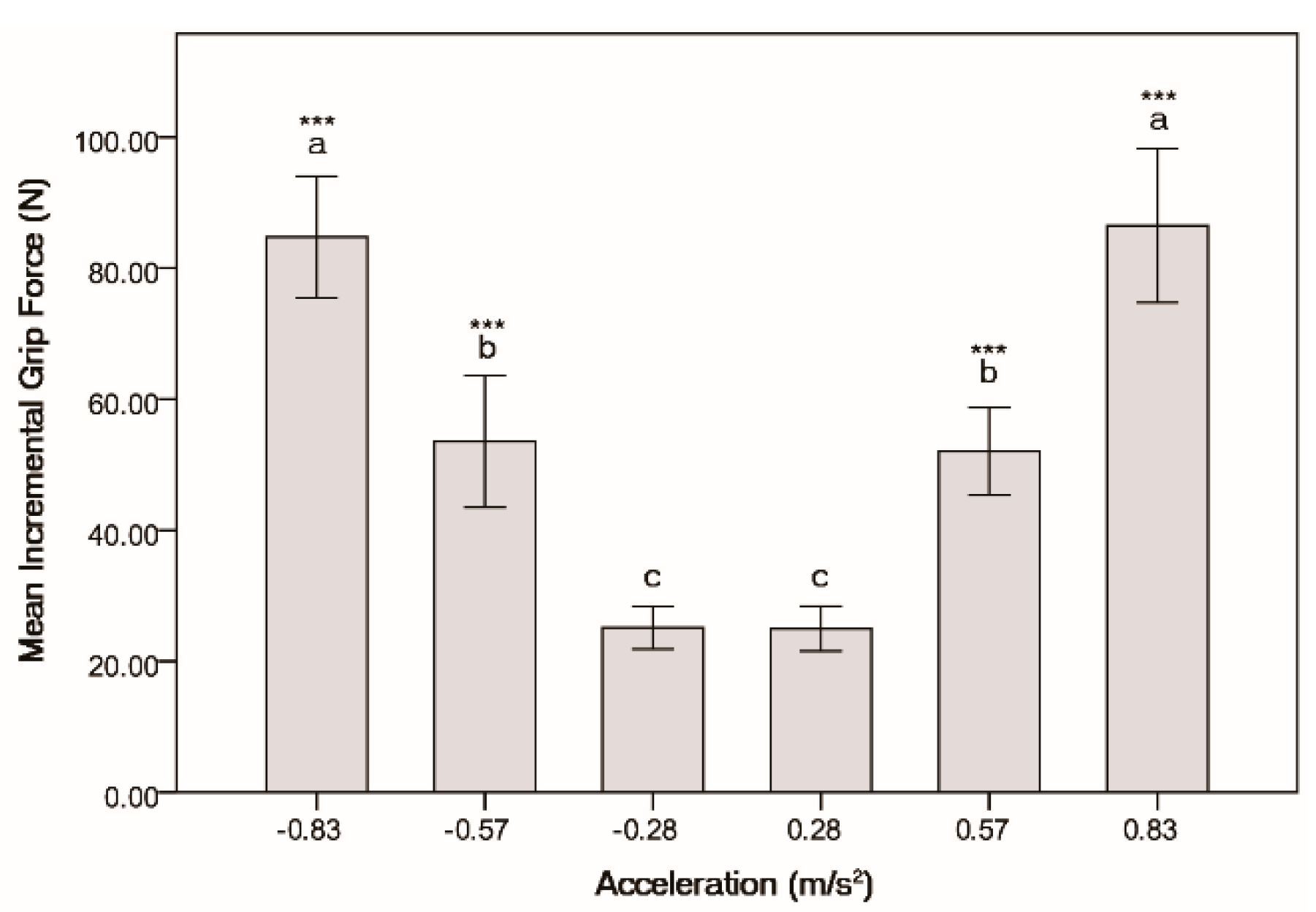
The first-stage experiment evaluated whether the simulation setup was suitable for simulating the longitudinal pulse of a rapid transit train. Six acceleration and deceleration working conditions, which were similar to the working conditions of Beijing metro line 4, were chosen as the experimental working conditions.
Table 2 describes the six working conditions in detail.
Before the start of the experiment, a signed informed consent document was obtained from the participants. Subsequently, information on their age and height was gathered. Participants’ standing ear heights (vestibular height), which were used as an input parameter of motion system controller, were measured with a ruler. Experimental setup, including the six working conditions, was described to all the participants.
Table 2.
Experimental working conditions.
Table 2.
Experimental working conditions.
| | Working Condition | Value (m/s2) |
|---|
| Traction | Micro acceleration | 0.28 |
| Slow acceleration | 0.56 |
| Hard acceleration | 0.83 |
| Braking | Micro deceleration | −0.28 |
| Slow deceleration | −0.56 |
| Hard deceleration | −0.83 |
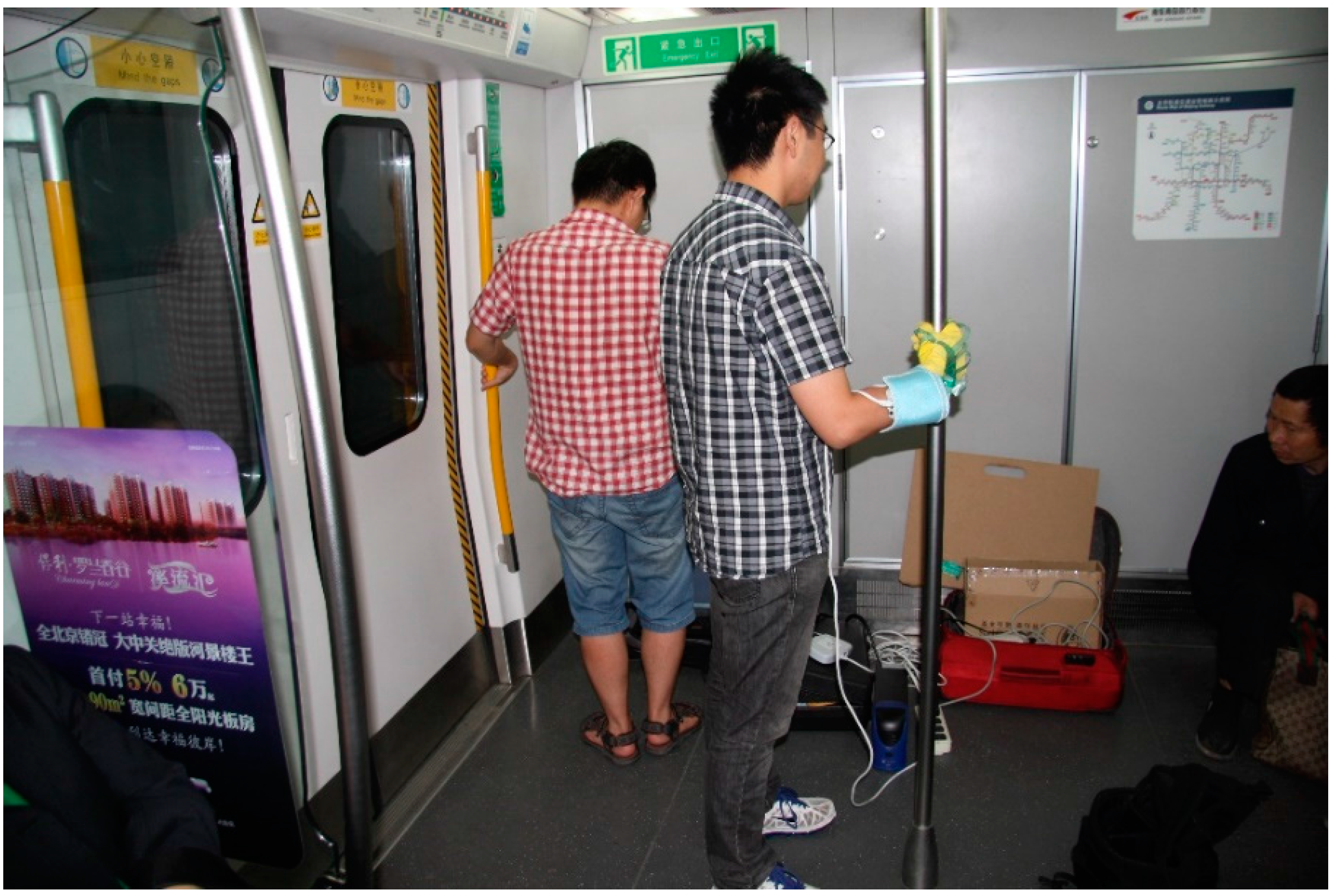
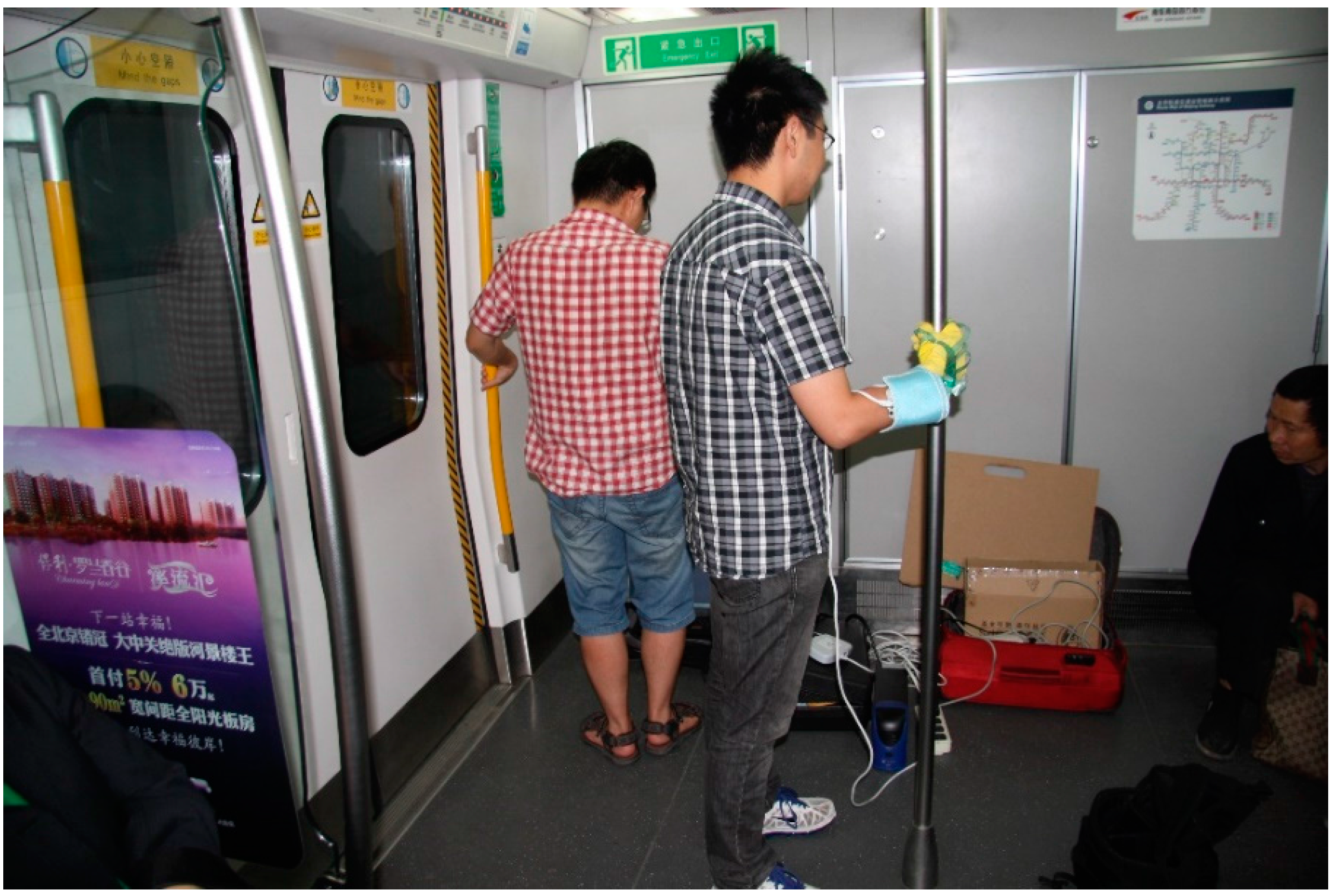
After the motion system had finished its initialization, the participant donning the head mount display stood on the platform and held the pole with his gloved hand. The experimental situation is shown in
Figure 6. The experiment was conducted in three steps:
- (1)
Participants took part in the simulation of all the six working conditions. After the motion system finished running a set of random working conditions. Participants verbally made their judgment on which the current working condition was. Each working condition appeared at least three times.
- (2)
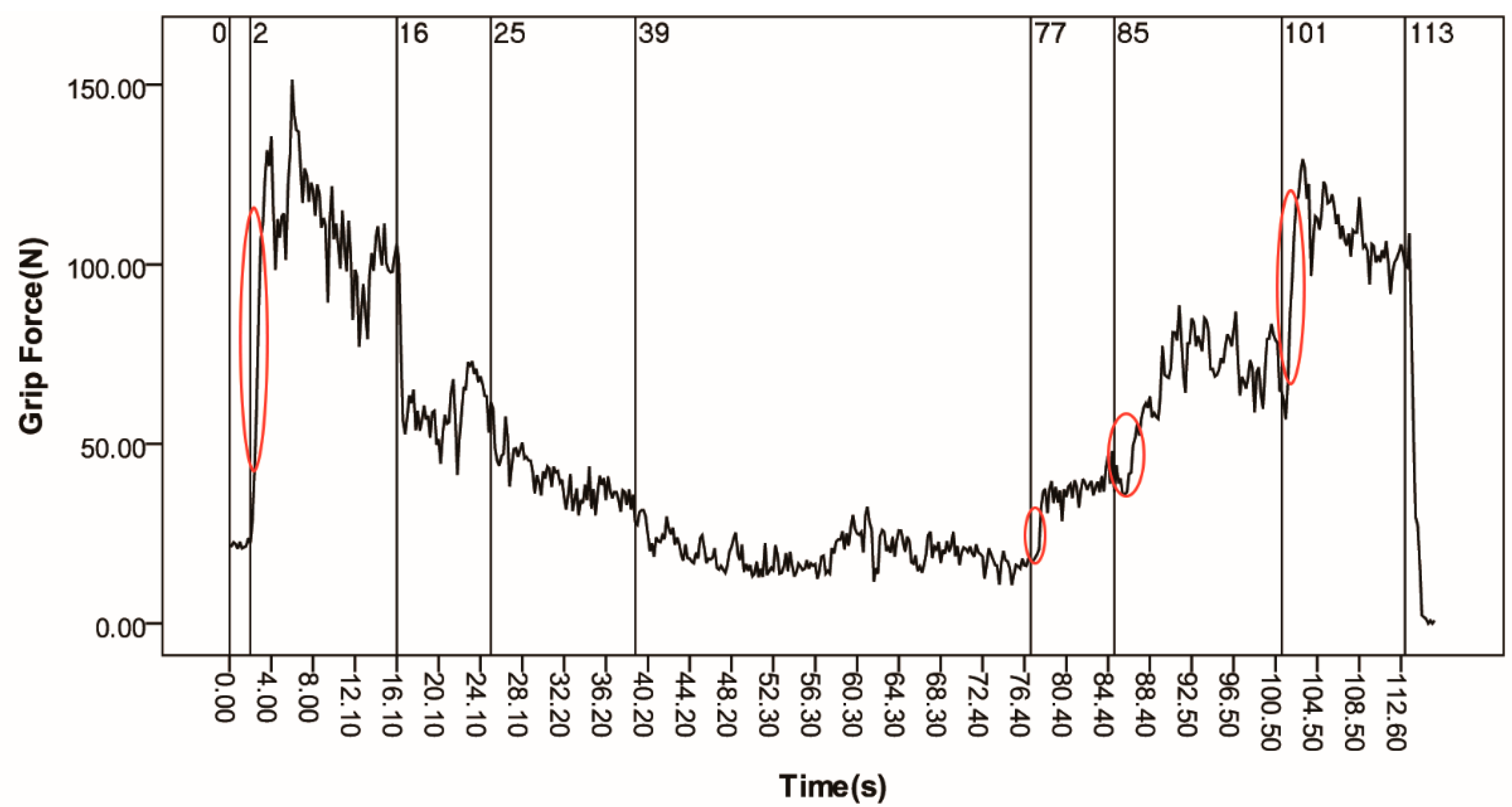
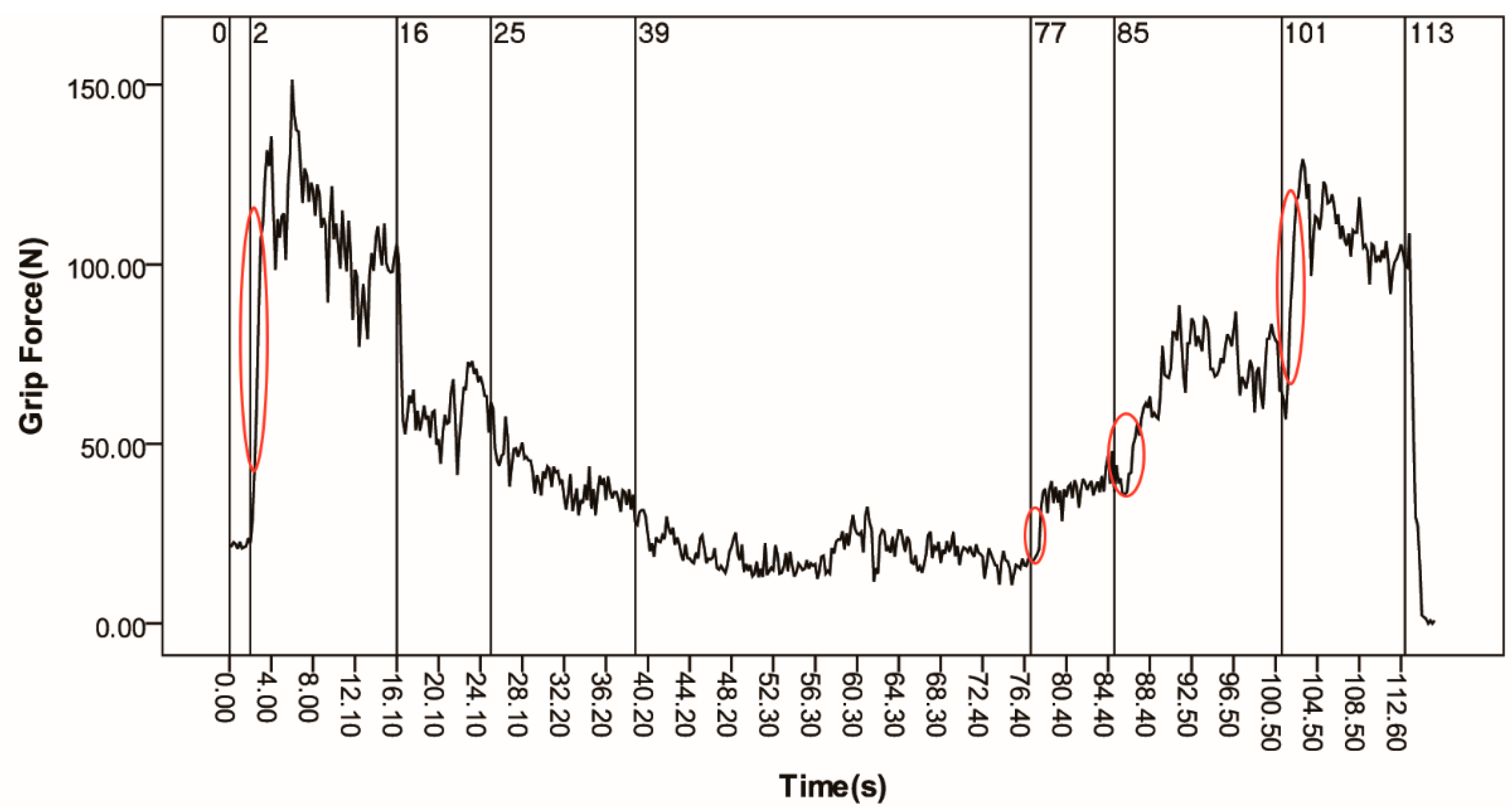
The motion system ran a simulation scenario, which was designed following the real trip between the National Library station and Weigongcun station of Beijing metro line 4, to simulate a complete running process of a train’s departure and arrival procedures. The process included three major phases: traction phase, cruise phase and braking phase. The detailed working conditions of the trip are listed in
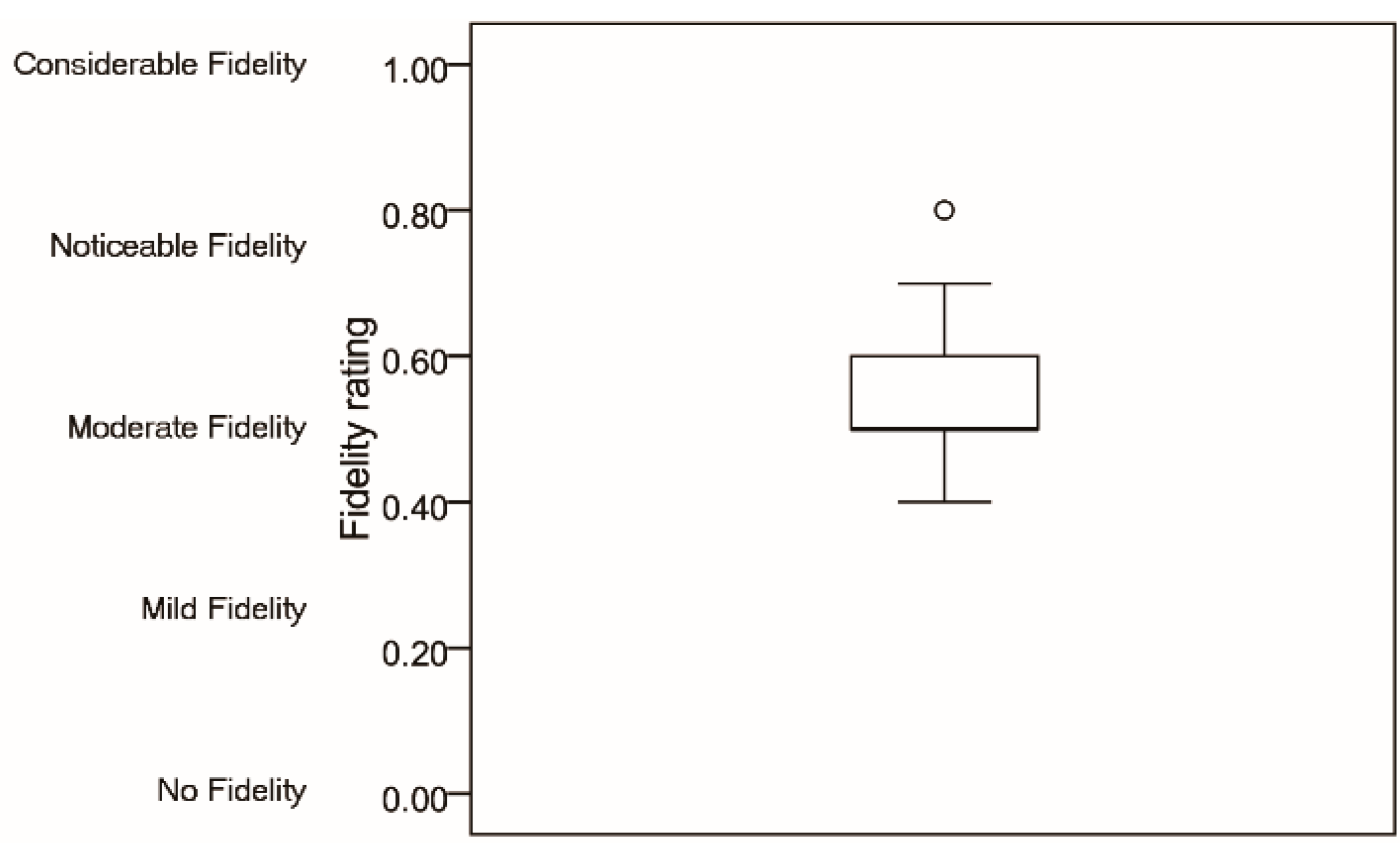
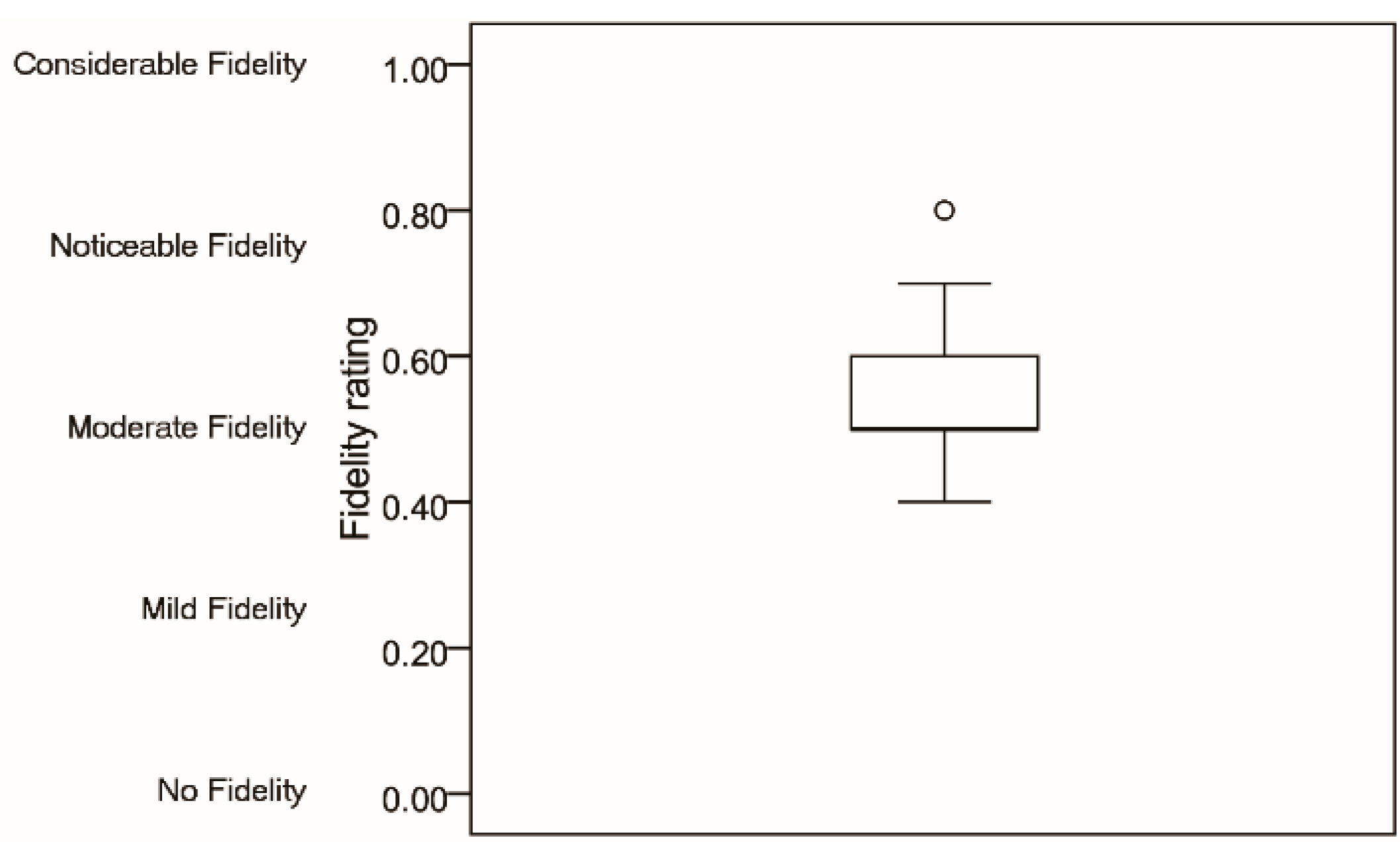
Table 3. When the simulation was running, participants continuously provided verbal judgments on which the current working condition was. Meanwhile, the grip pressure mapping system continuously recorded the grip force of participants. The sampling rate of the grip force system was set to be 5 Hz. After the simulation, a visual analog scales of motion sensation were used and participants verbally gave their ratings to the experimenter. The scales ranged from 0 to 1, with 0.5 as neutral. The motion sensation scale ranged from no fidelity (score 0) to considerable fidelity (score 1).
- (3)
After finishing all the above simulation tasks, each participant filled out a five-point Likert visual analog scales questionnaire to report their motion sensation of vertical direction (Z axis). The sensation scale ranged from no sensation (1), to mild (2), moderate (3), noticeable (4) and considerable sensation (5).
Figure 6.
The experimental situation.
Figure 6.
The experimental situation.
Table 3.
Working conditions of the whole running process scenario.
Table 3.
Working conditions of the whole running process scenario.
| Time (s) | Acceleration Value (m/s2) |
|---|
| 0–14 | 0.83 |
| 14–23 | 0.57 |
| 23–37 | 0.28 |
| 37–75 | 0 |
| 75–83 | −0.28 |
| 83–99 | −0.57 |
| 99–111 | −0.83 |
2.4.2. Stage Two
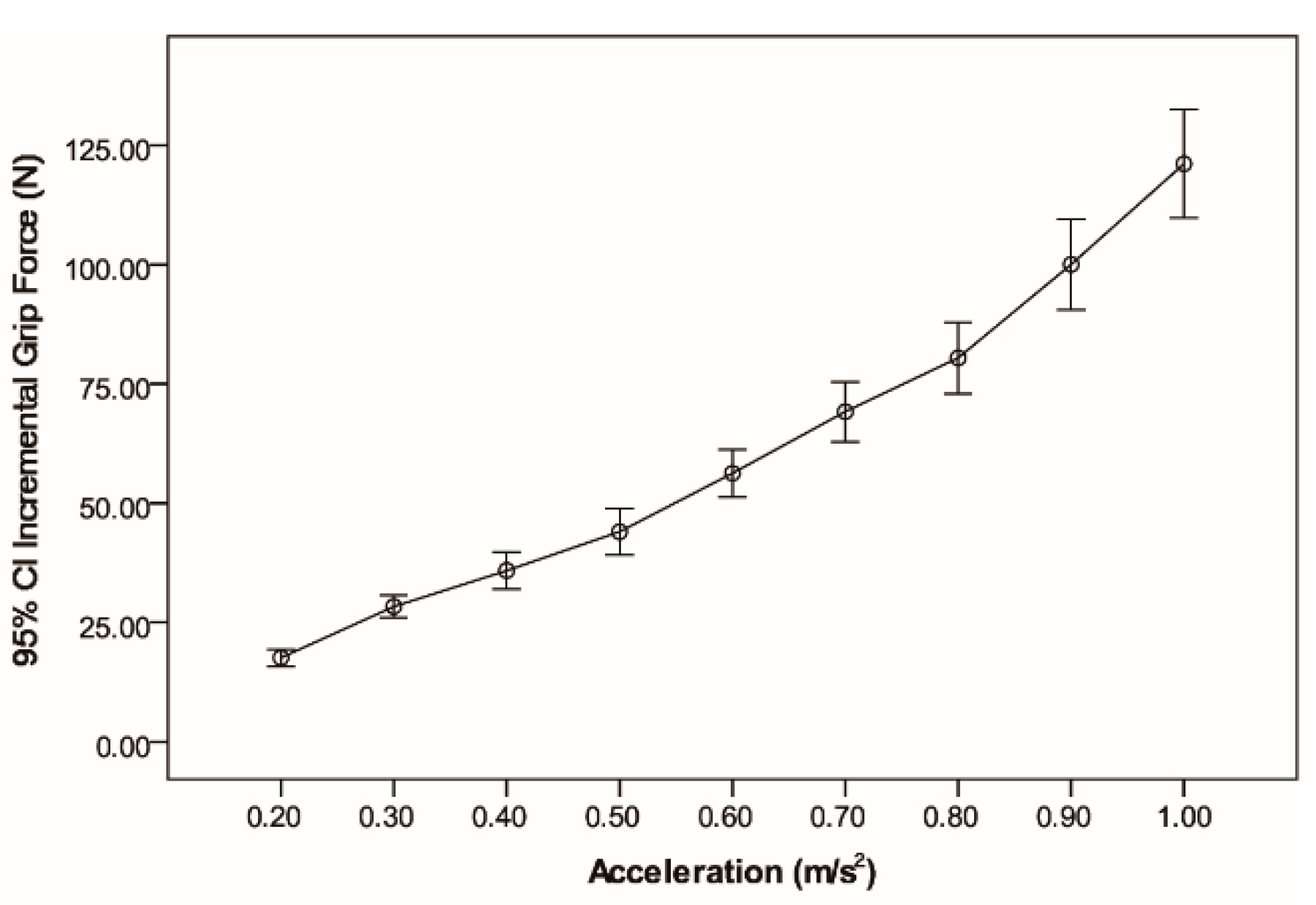
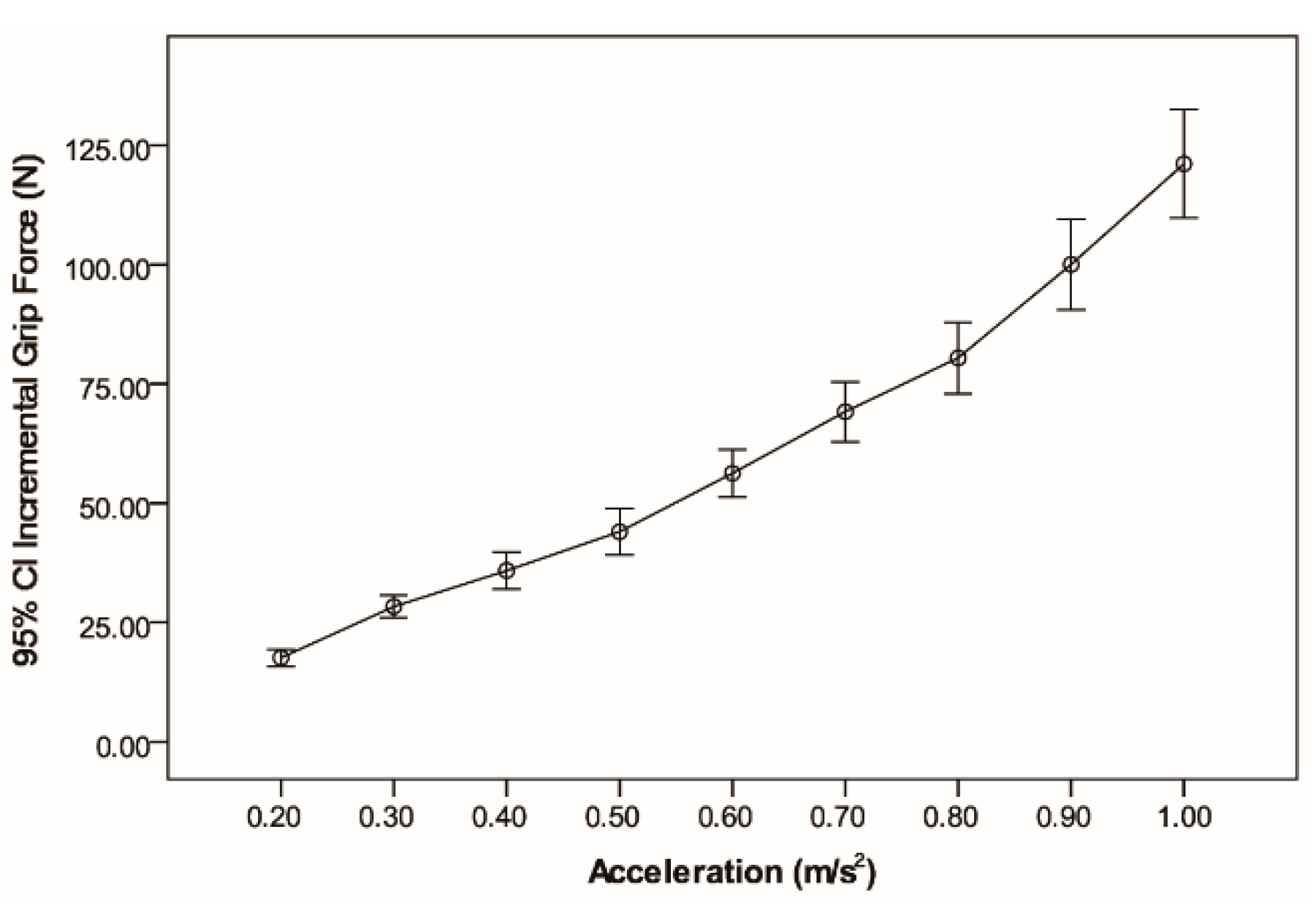
The second-stage experiment was designed to investigate the correlation between hand grip force and longitudinal comfort. The preparatory work of the second-stage was similar to the one of the first-stage experiment. Acceleration value and acceleration duration of acceleration were considered as the experimental parameters in the second-stage experiment. The tested acceleration values ranged from 0.2 m/s
2 to 1.0 m/s
2 with 0.1 m/s
2 as an interval, for a total of nine levels. The maximum acceleration of a rapid transit train is much lower, typically of the order of 1.0 m/s
2 [
21]. The tested acceleration duration ranged from 3 s to 10 s with 1 s as an interval, for a total of eight levels. Participants were asked to stand on the platform and hold the pole with a gloved hand. The grip pressure mapping system continuously recorded the grip force of participants. The level of acceleration value and the level of duration time were randomly chosen to avoid spurious distortions of the experimental results. Each possible combination of the acceleration value level and duration time level was presented at least two times to each participant. A visual analog scale of motion comfort was used and participants verbally reported their motion comfort at each acceleration value level and acceleration duration level. The scales range from 0 to 1 with 0.5 as neutral. The scale’s labels ranged from extremely comfortable to extremely uncomfortable.
2.5. Data Analysis
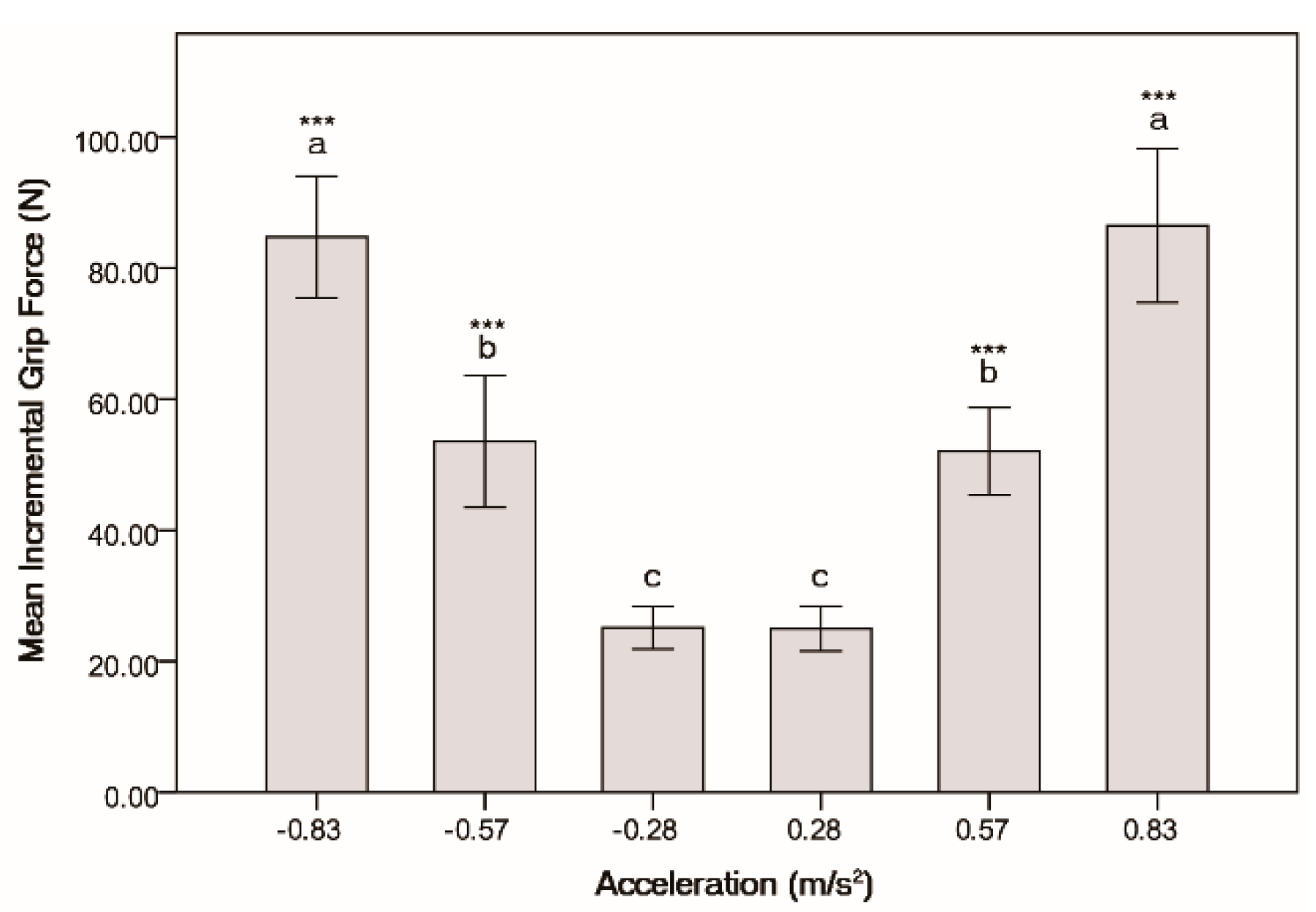
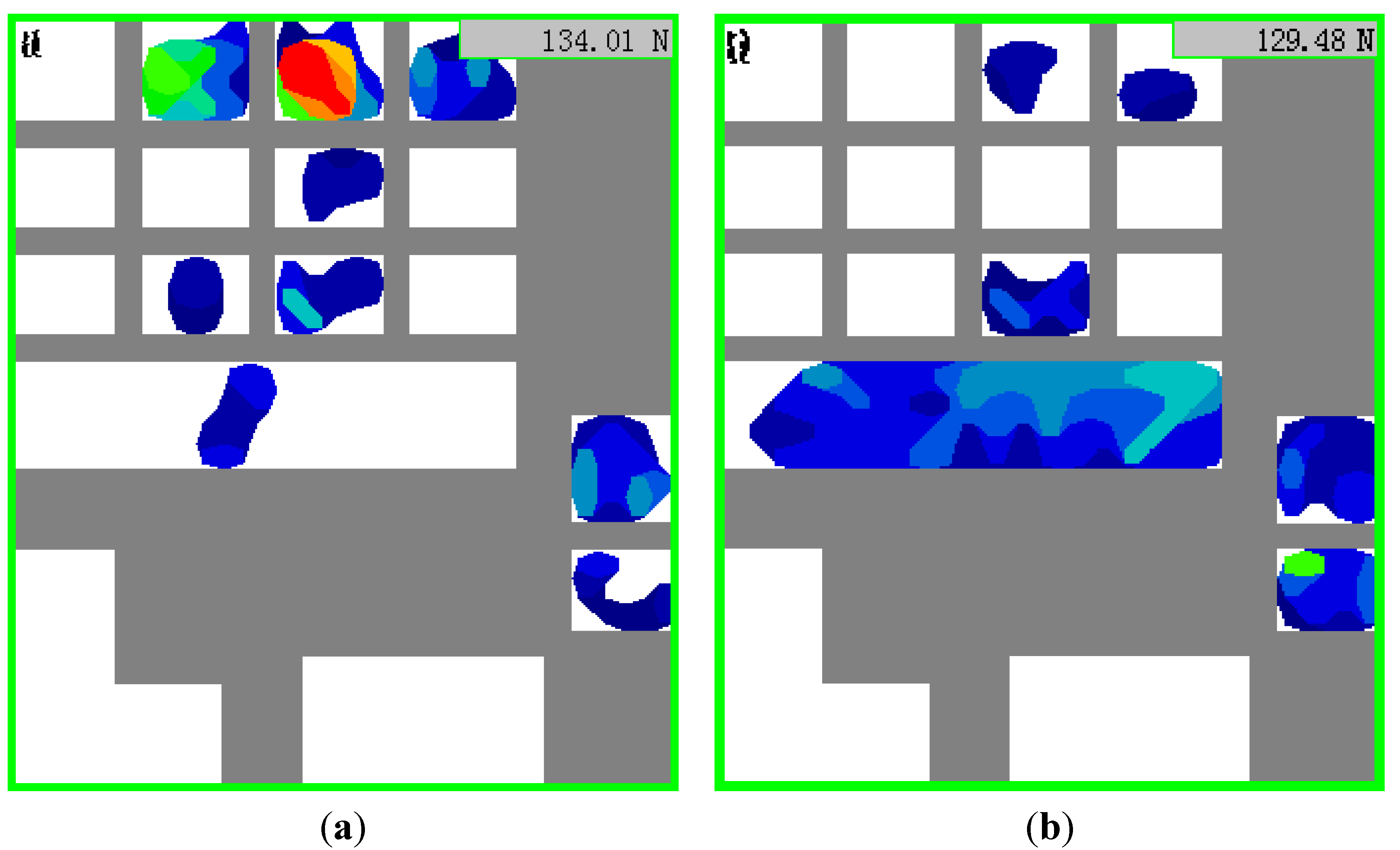
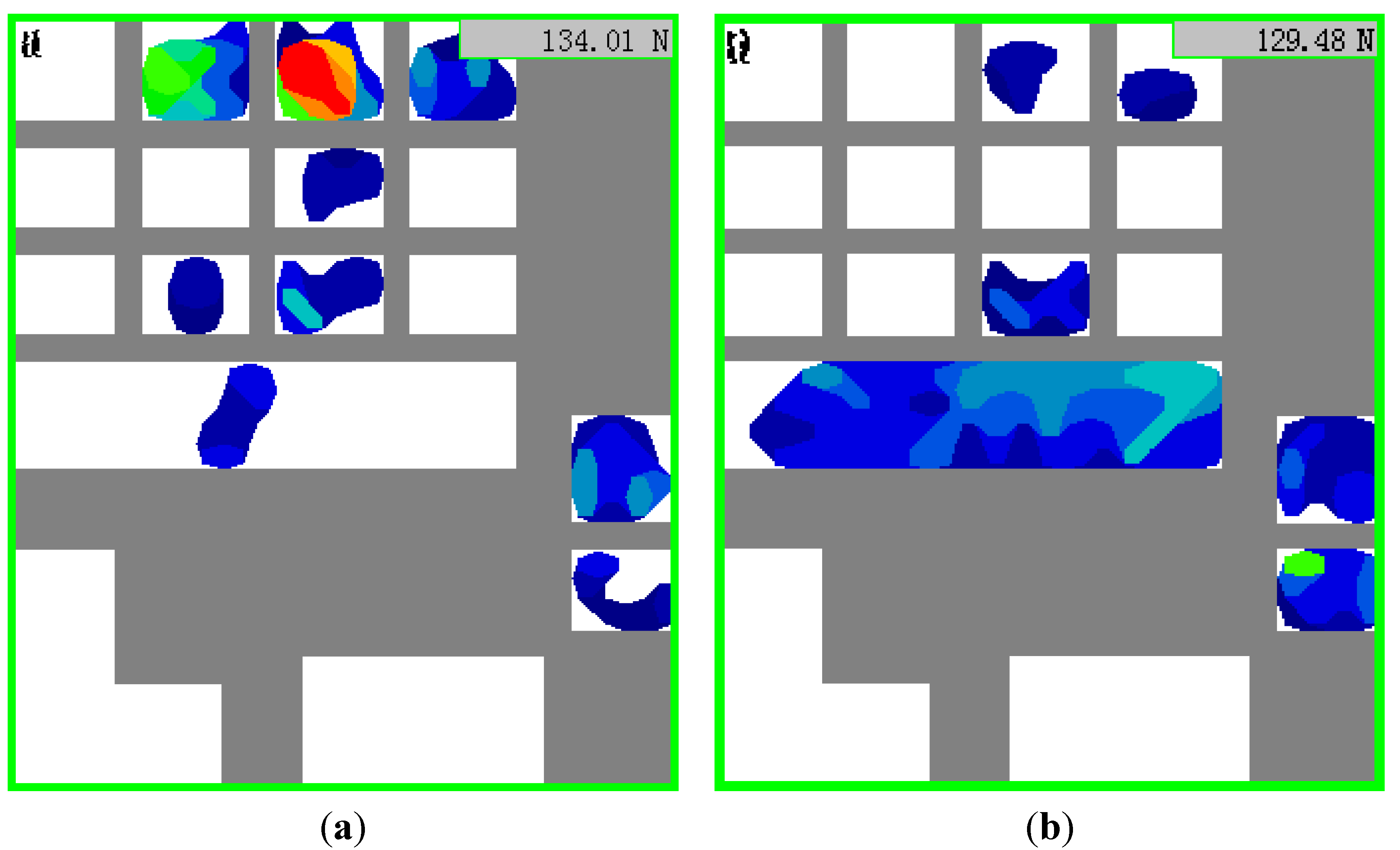
The pressure data was processed using Grip Research version 6.51 (which is shipped with Tekscan grip pressure mapping system) to obtain the grip force of the participants. The base grip force was different due to the individual differences between participants. Hence, the average grip force of each participant in a static state was defined as the base grip force of the participant, and incremental grip forces, which were the differences between the present grip force and the base grip force, were used to do the subsequent analysis. The mean grip force of each participant in static state, and the incremental grip forces of each participant at difference acceleration levels were calculated as follows:
where
was the average grip force in static state,
was the total data frame number in static state,
was the grip force at data frame
n,
was the average grip force at the acceleration level of
a,
was the total data frame number at the acceleration level of
a,
was the incremental grip forces at the acceleration level of
a. Paired t-tests, Tukey’s HSD procedure and multitude regression analysis [
22] were used to study the effects of incremental grip force on the longitudinal comfort score of rapid transit train.
p < 0.05 was considered significant.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}