
Noninvasive and Real-Time Plasmon Waveguide Resonance Thermometry


Abstract
:1. Introduction
2. Experimental Section
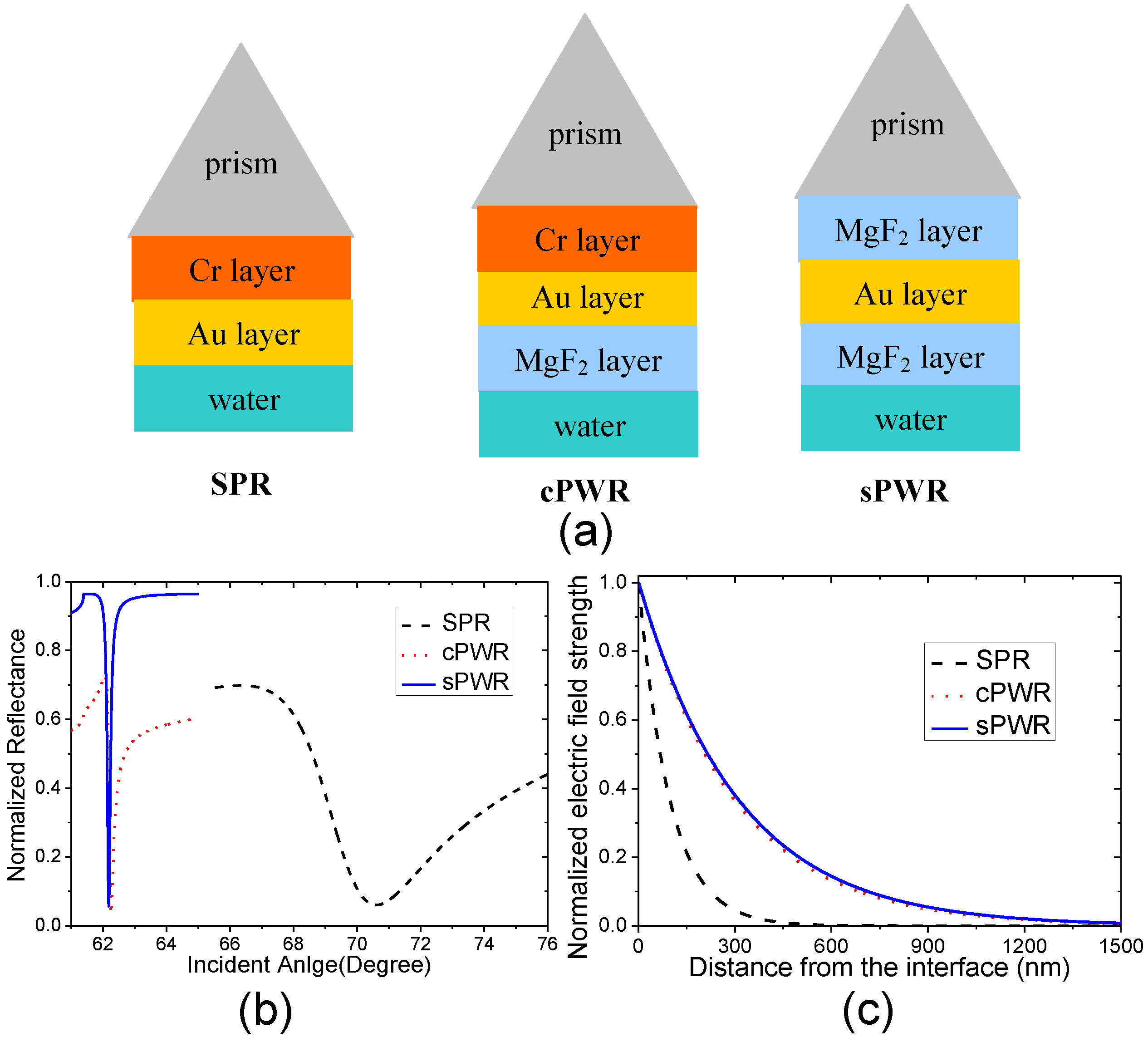
2.1. Design Consideration
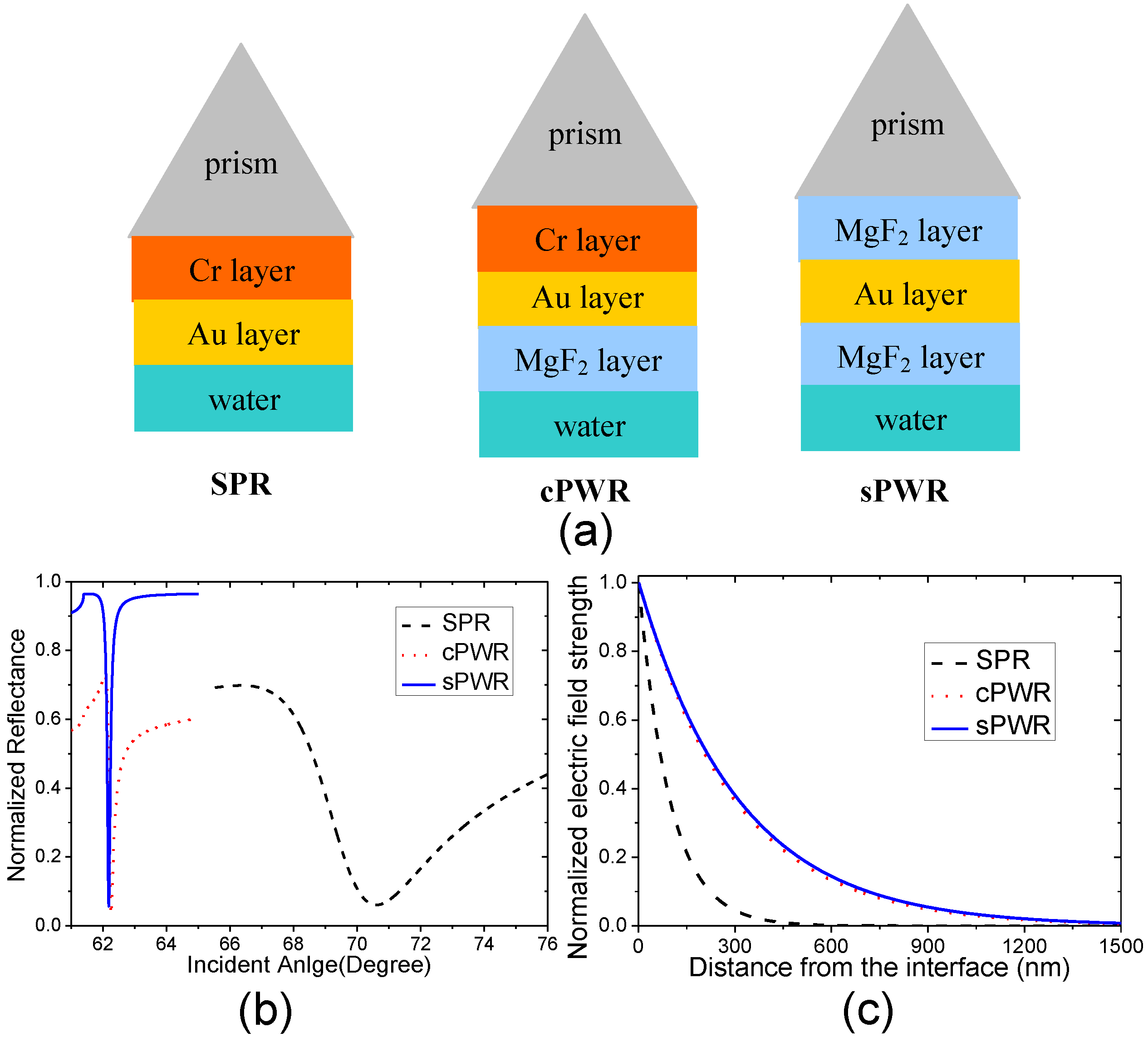
2.2. Sensor Chips
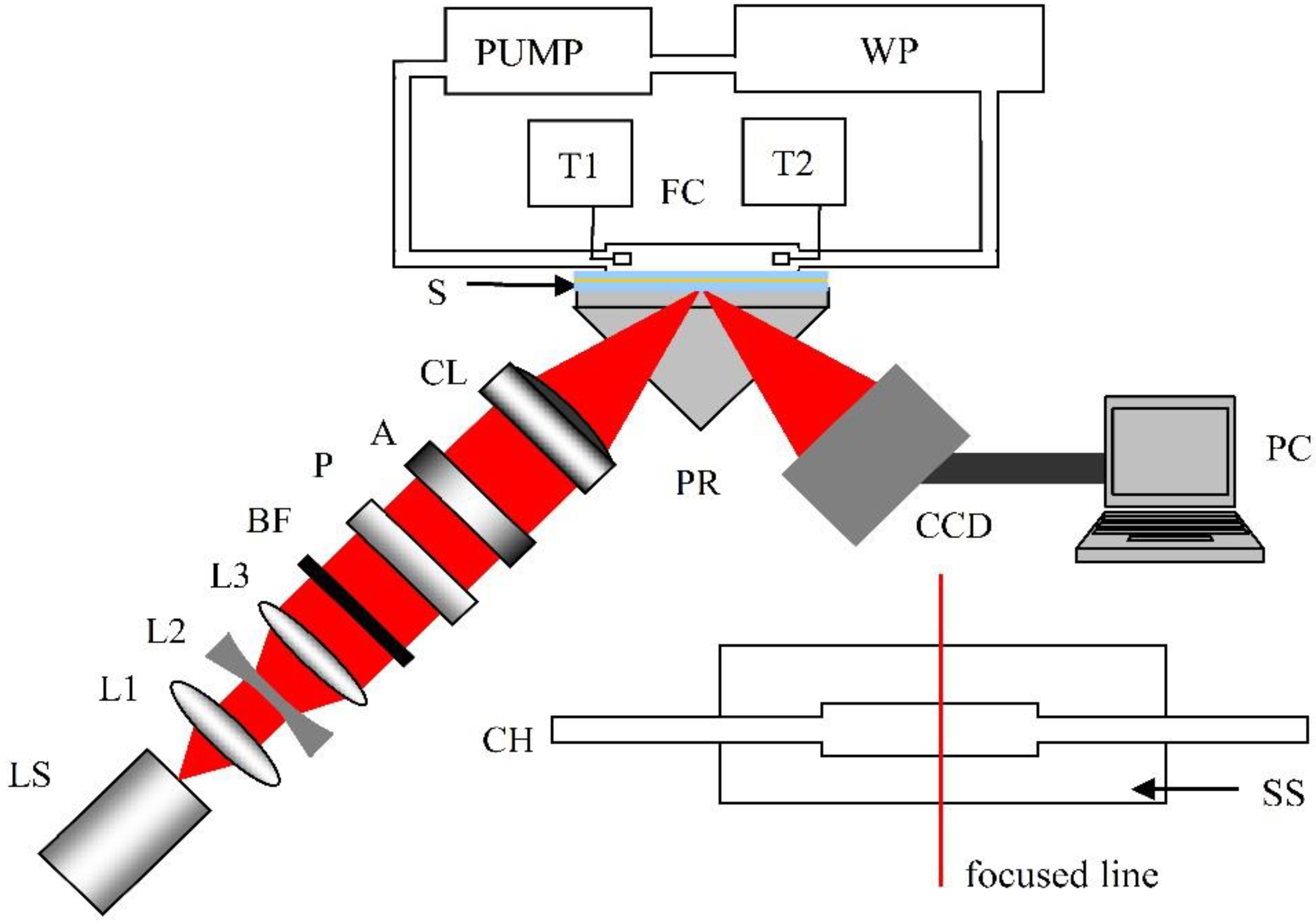
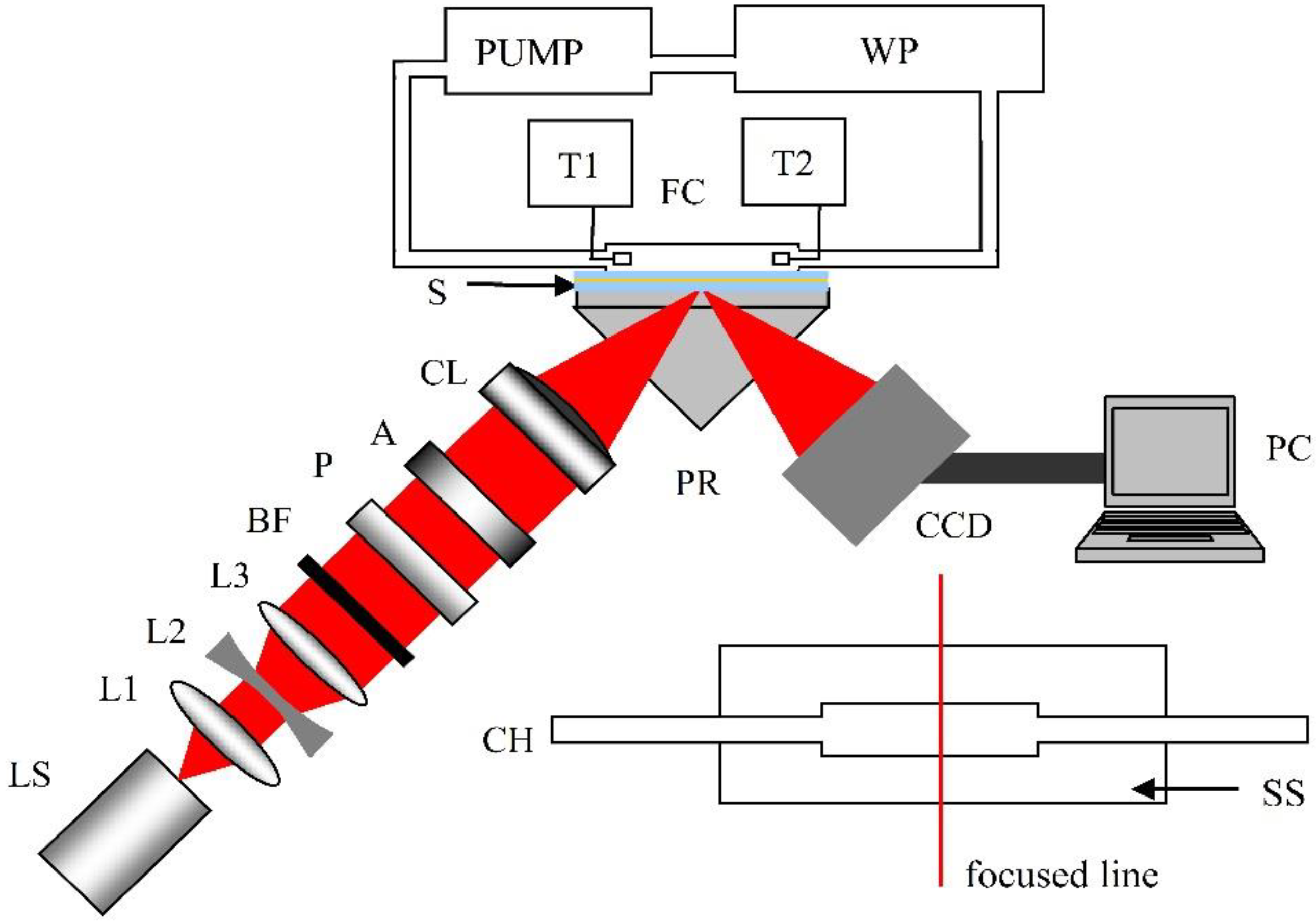
2.3. Experimental Setups
3. Results and Discussion
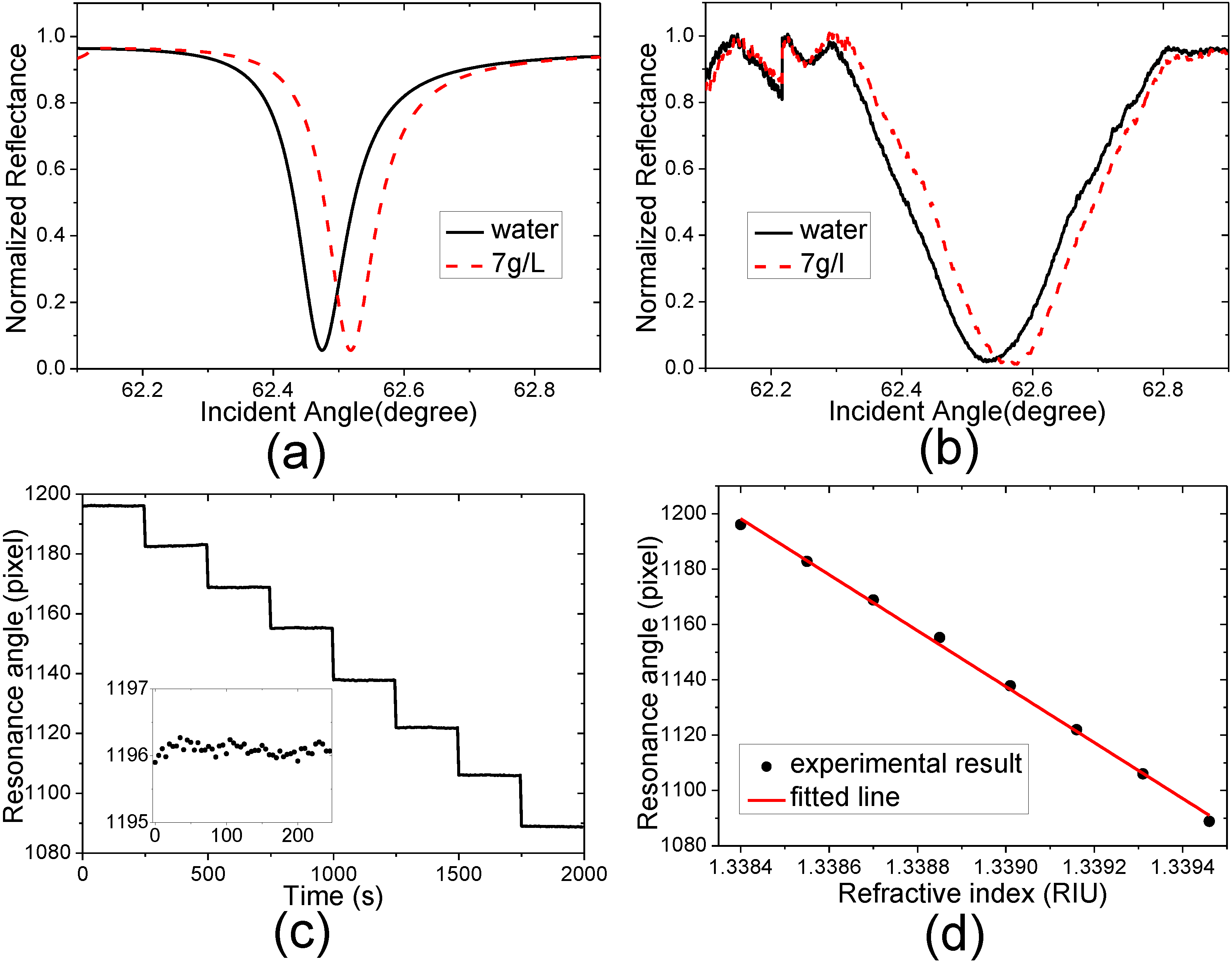
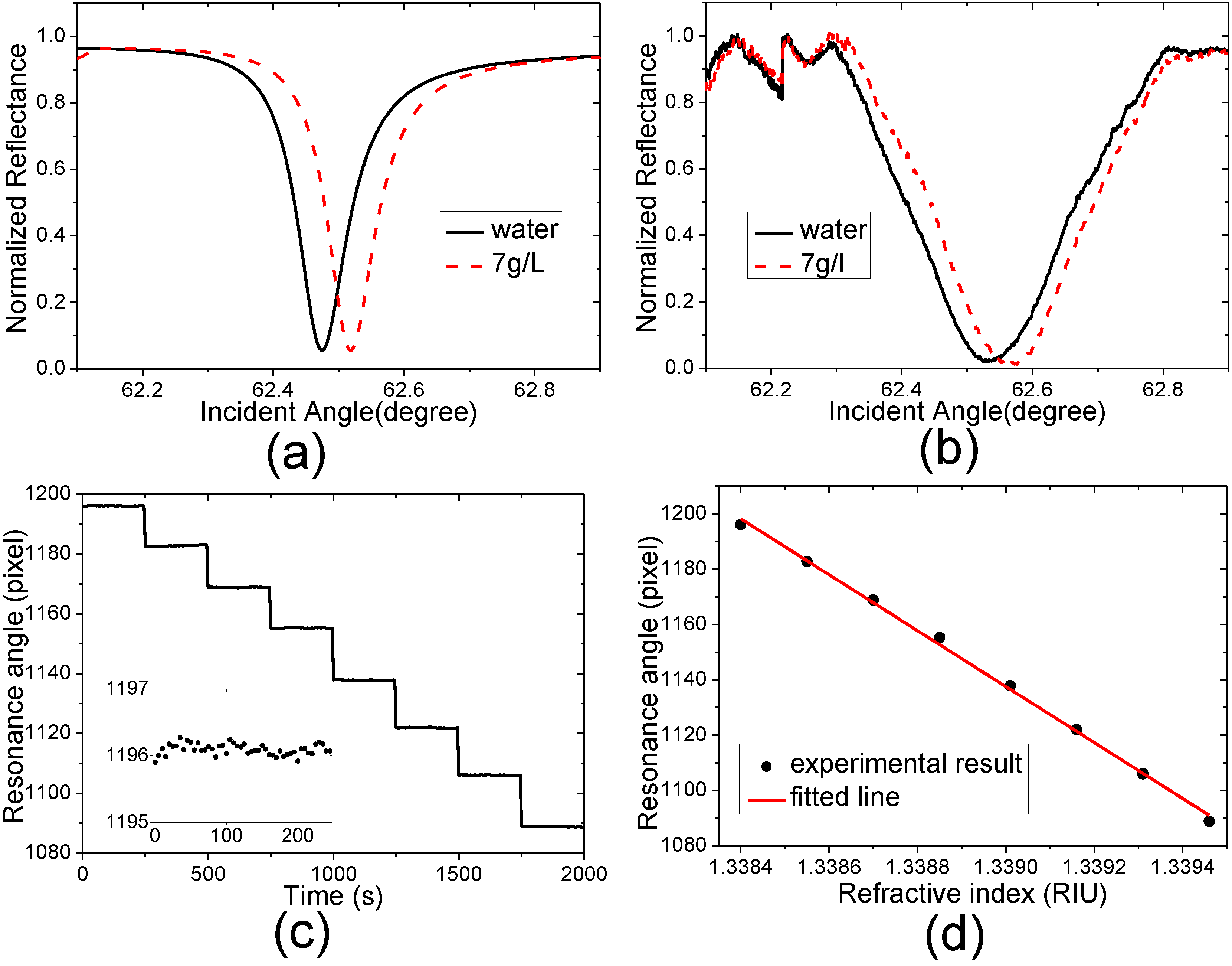
3.1. RI Test

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Theoretical CSF (RIU−1) | Experimental CSF (RIU−1) | RI Resolution (RIU) |
|---|---|---|---|
| SPR | 14 | 12 | 3.2 × 10−6 |
| Silica-cPWR | 37 | 38 | 2.3 × 10−6 |
| MgF2-cPWR | 167 | 142 | 9.3 × 10−7 |
| sPWR | 381 | 206 | 7.9 × 10−7 |
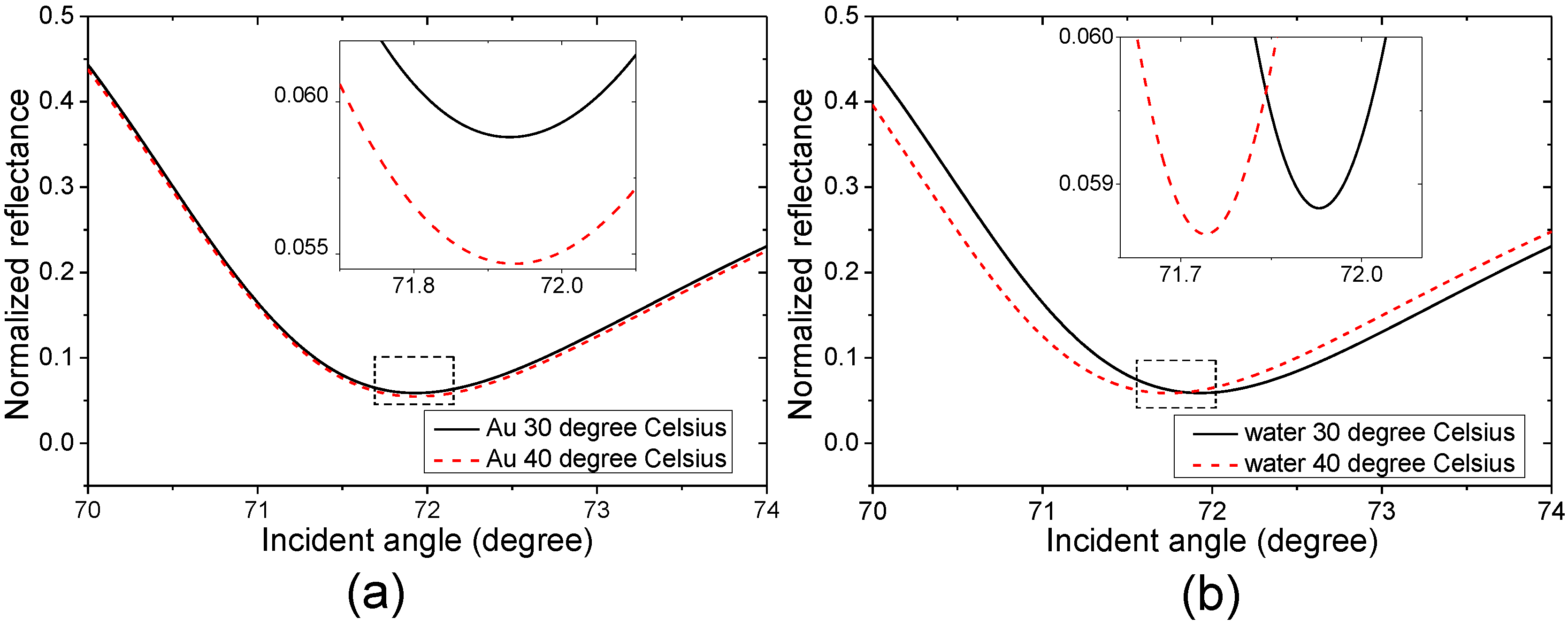
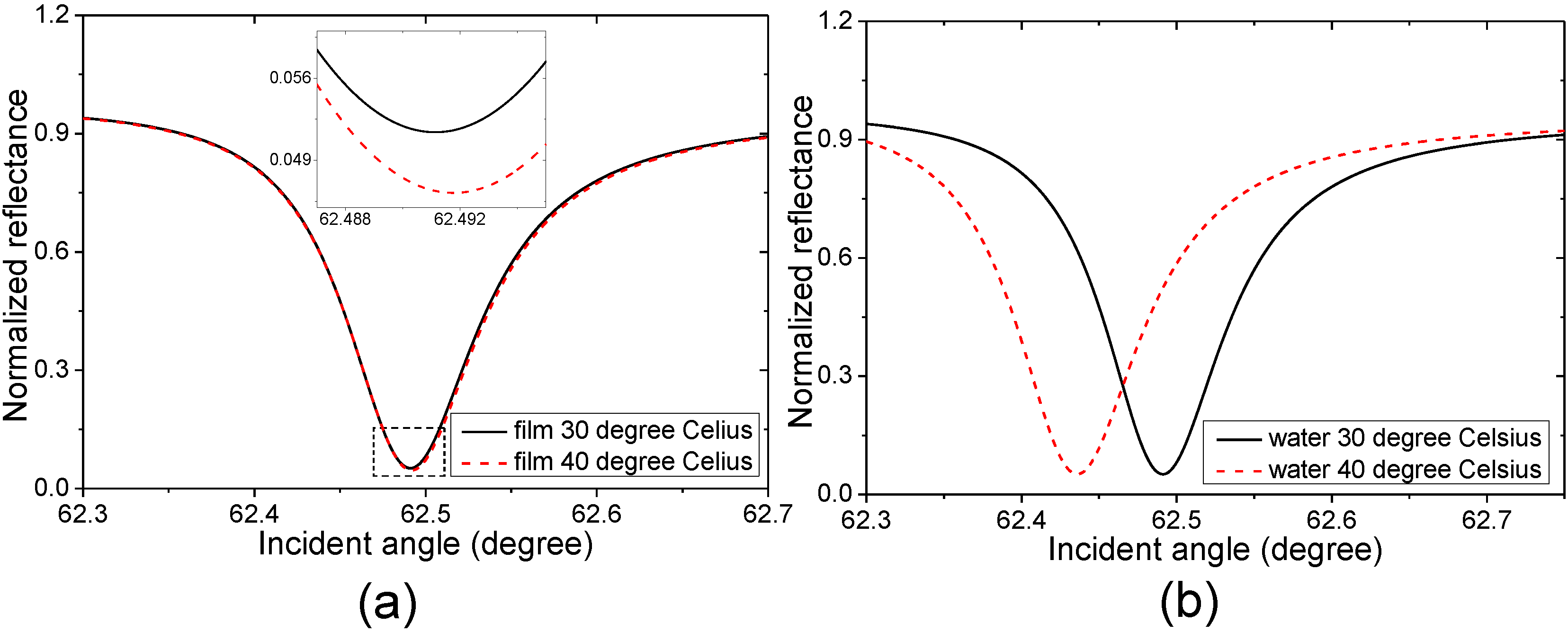
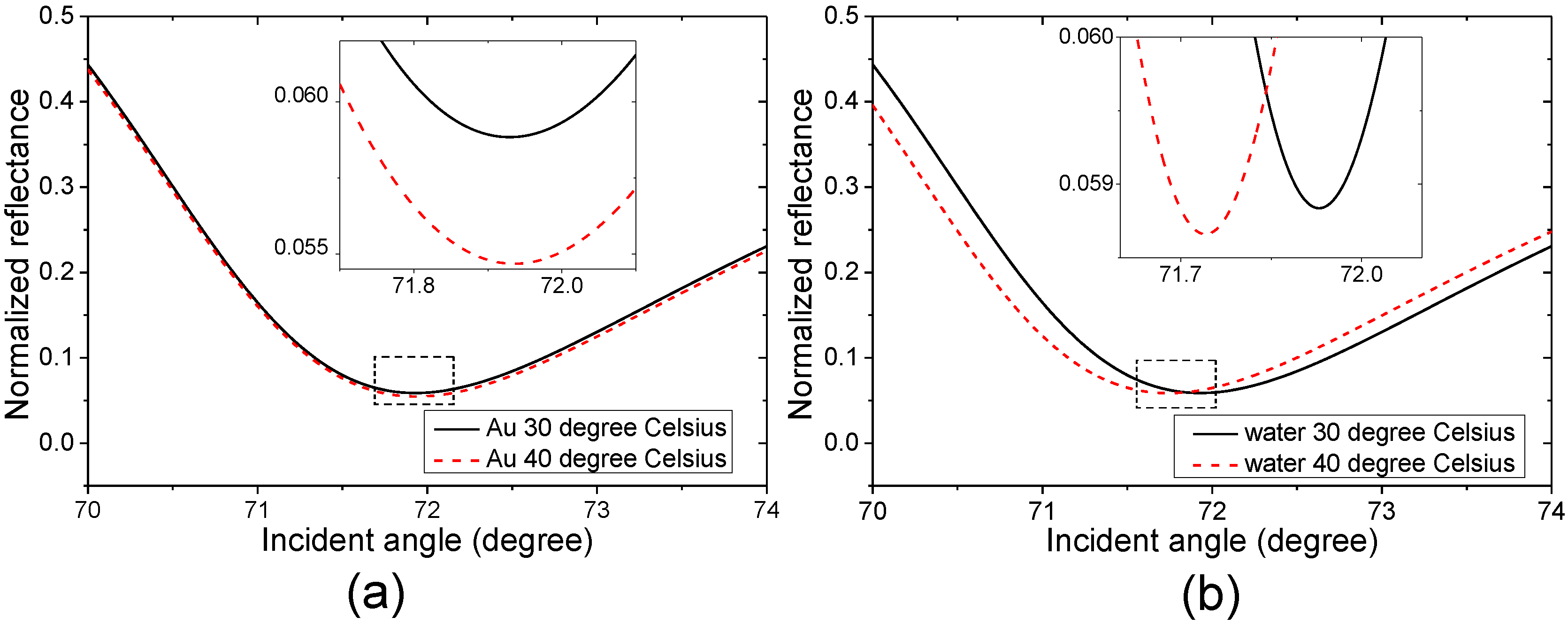
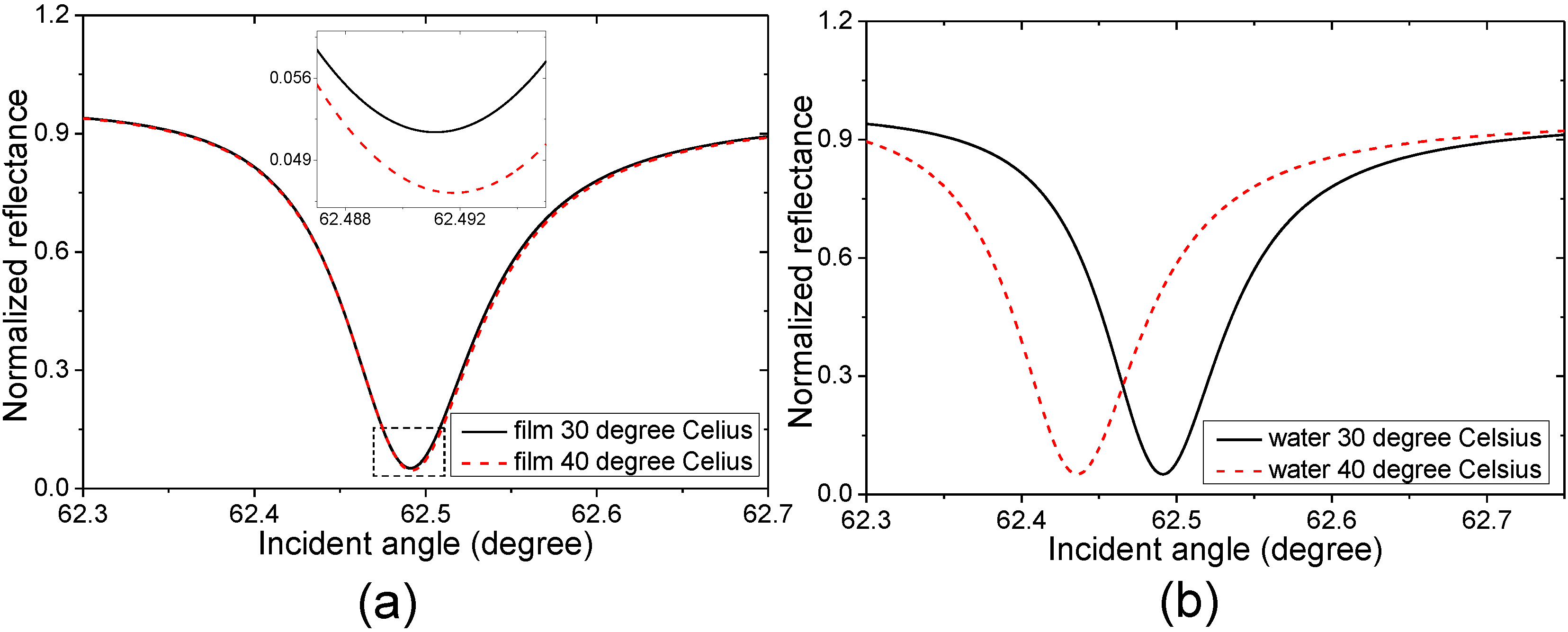
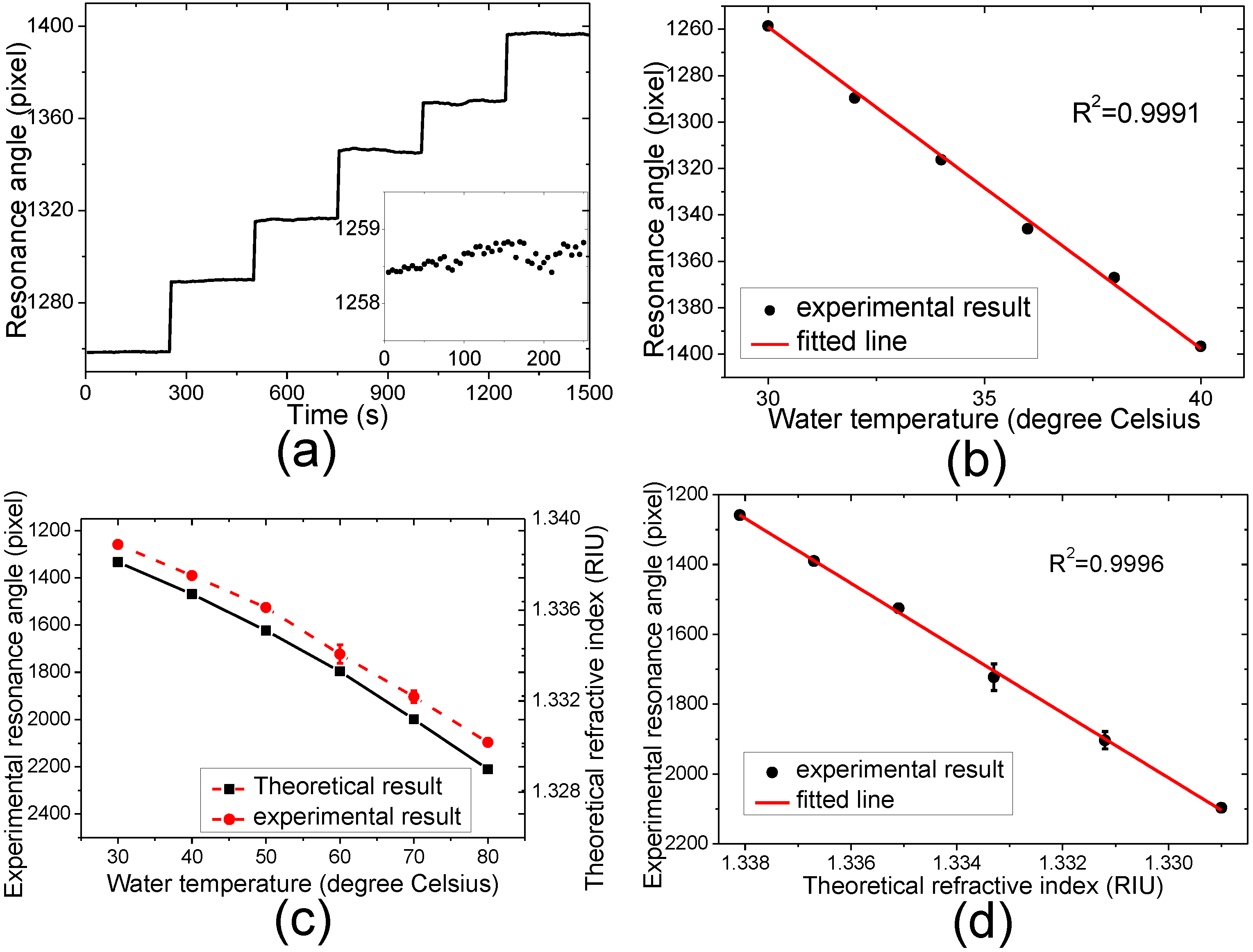
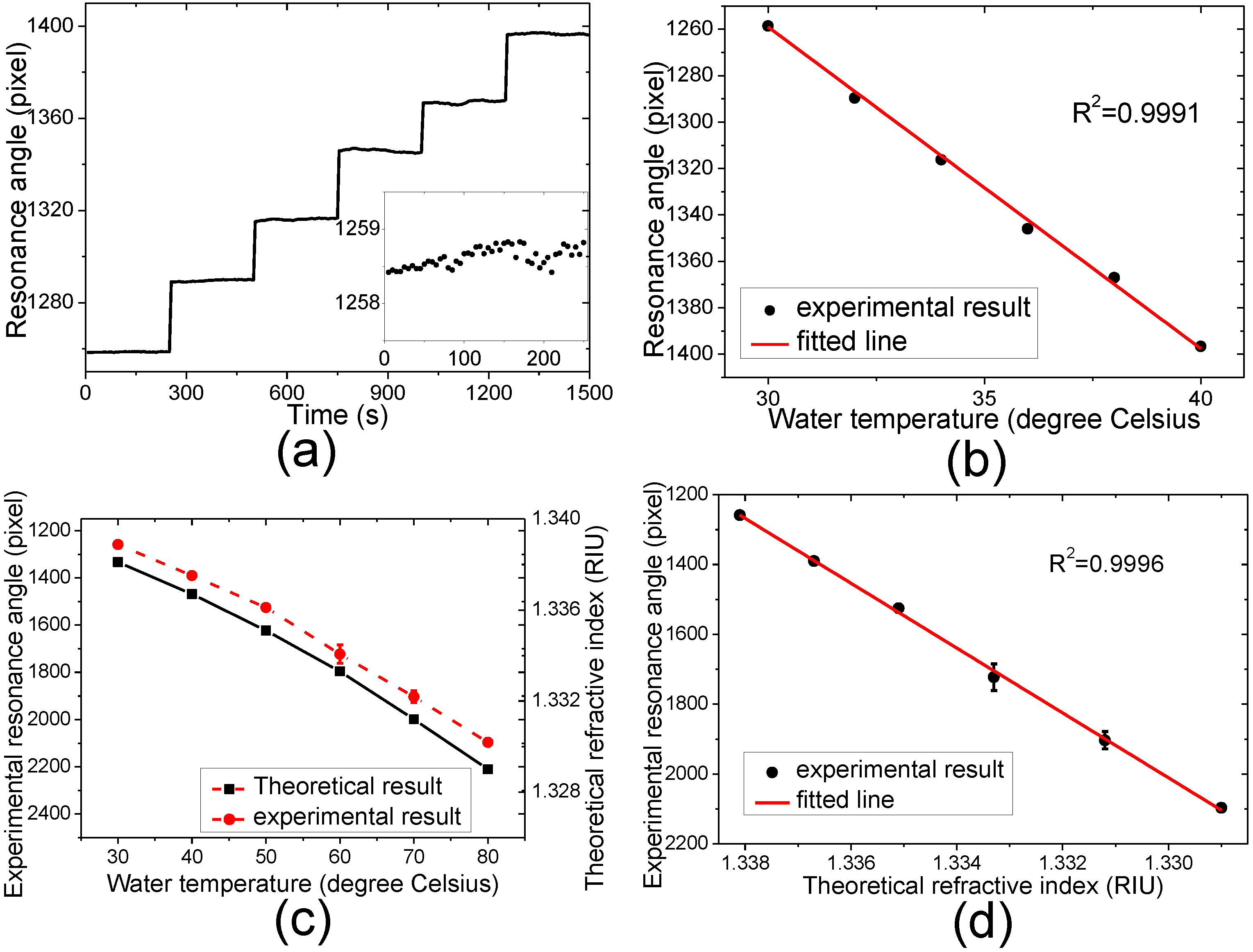
3.2. Temperature Sensing
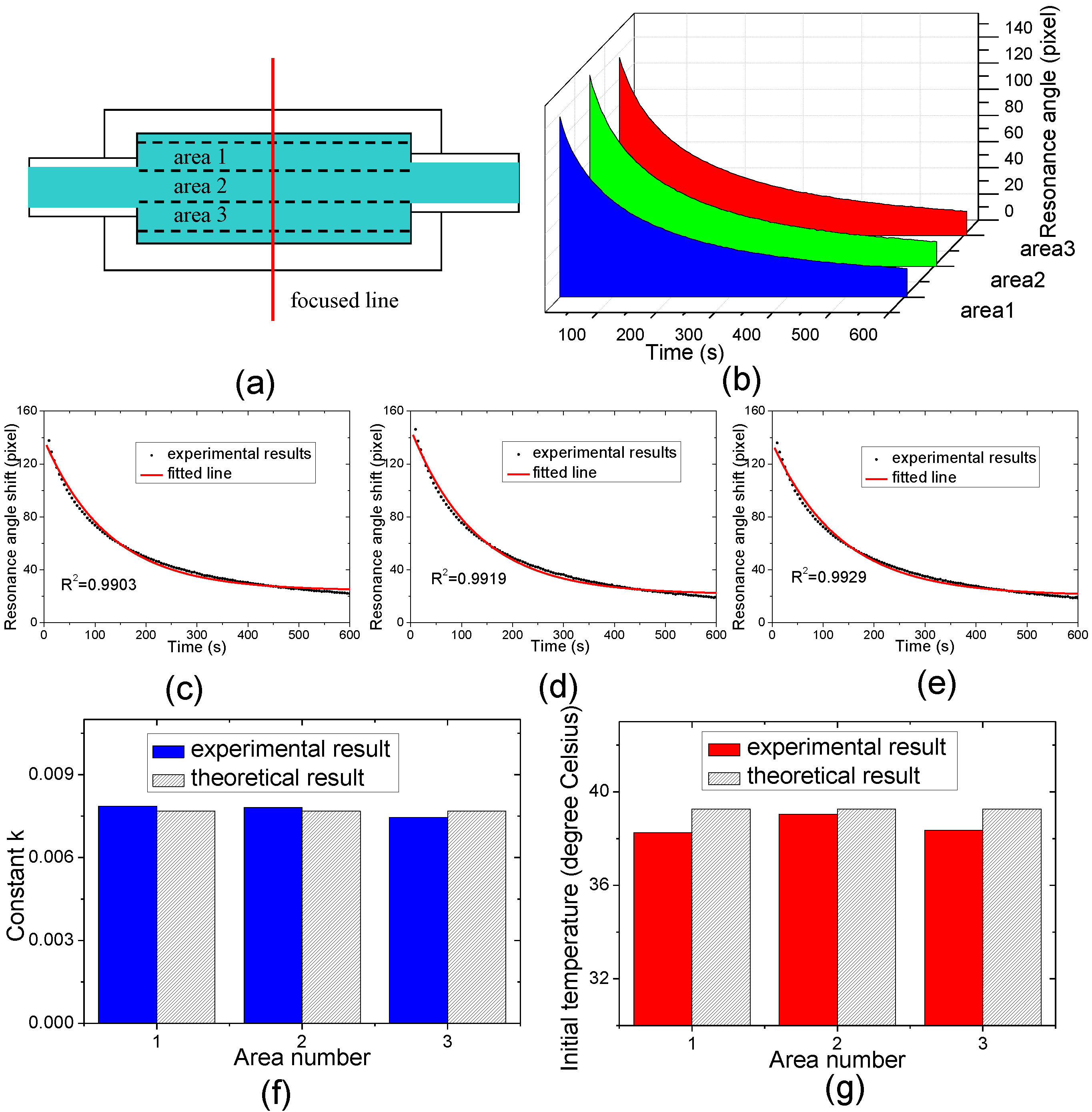
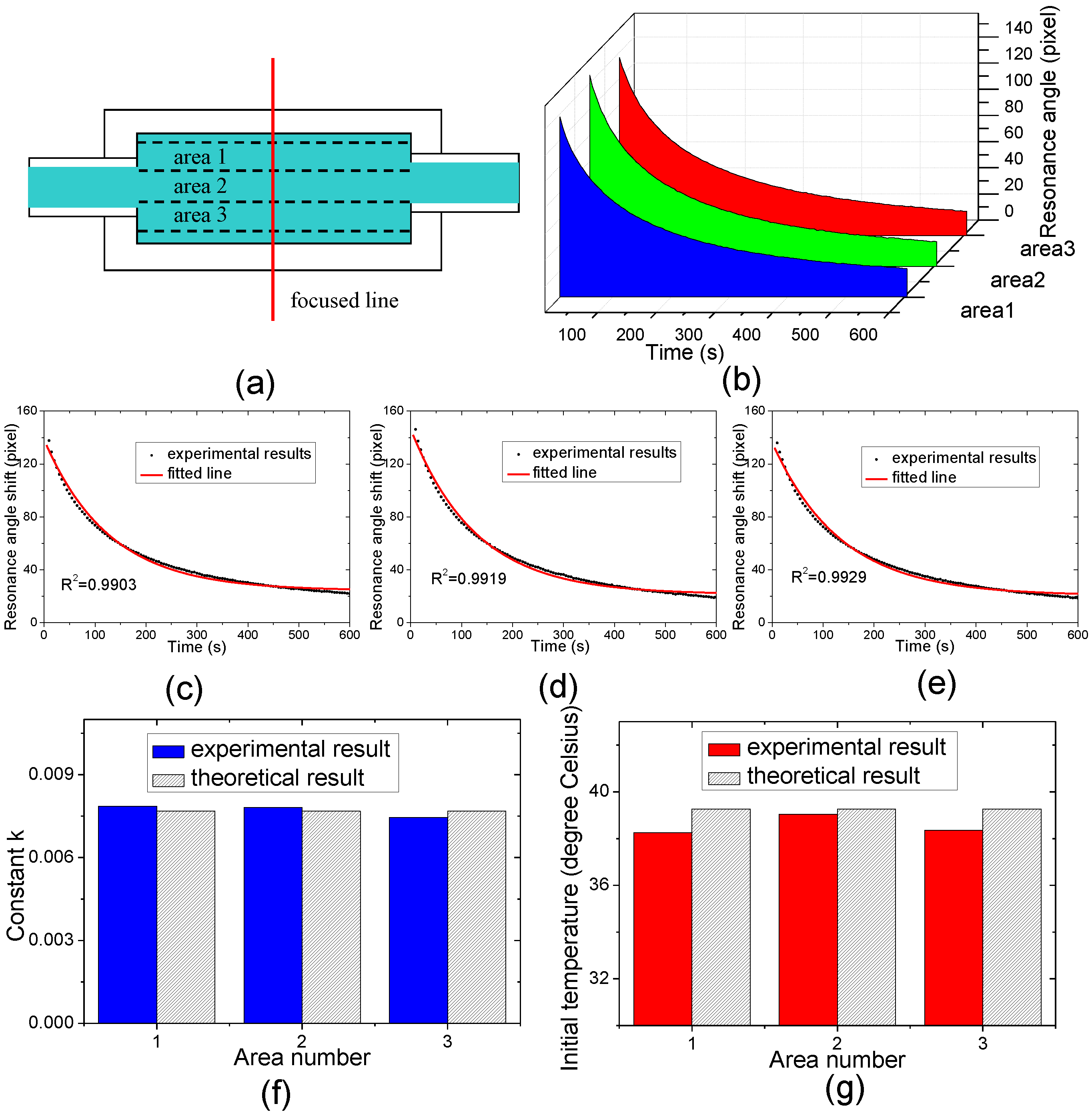
3.3. Real Time Natural Cooling Process Measurement
4. Conclusions
Acknowledgements
Author Contributions
Conflicts of Interest
References
- Childs, P.R.N.; Greenwood, J.R.; Long, C.A. Review of temperature measurement. Rev. Sci. Instrum. 2000, 71. [Google Scholar] [CrossRef]
- Weinert, F.M.; Kraus, J.A.; Franosch, T.; Braun, D. Microscale fluid flow induced by thermoviscous expansion along a traveling wave. Phys. Rev. Lett. 2008, 100. [Google Scholar] [CrossRef]
- Homola, J.; Yee, S.S.; Gauglitz, G. Surface plasmon resonance sensors: Review. Sens. Actuators B 1999, 54, 3–15. [Google Scholar] [CrossRef]
- Yager, P.; Edwards, T.; Fu, E.; Helton, K.; Nelson, K.; Tam, M.R.; Weigl, B.H. Microfluidic diagnostic technologies for global public health. Nature 2006, 442, 412–418. [Google Scholar] [CrossRef] [PubMed]
- Ross, D.; Gaitan, M.; Locascio, L.E. Temperature measurement in microfluidic system using a temperature-dependent fluorescent dye. Anal. Chem. 2001, 73, 4117–4123. [Google Scholar] [CrossRef] [PubMed]
- Irace, A.; Breglio, G. All-silicon optical temperature sensor based on multi-mode interference. Opt. Express 2003, 11, 2807–2812. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Rao, Y.J.; Chen, Y.H.; Gong, Y. Miniature fiber-optic temperature sensors based on silica/polymer microfiber knot resonators. Opt. Express 2009, 20, 18142–18147. [Google Scholar] [CrossRef]
- Dong, C.H.; He, L.; Xiao, Y.F.; Gaddam, V.R.; Ozdemir, S.K.; Han, Z.F.; Guo, G.C.; Yang, L. Fabrication of high-Q polydimethylsiloxane optical microspheres for thermal sensing. Appl. Phys. Lett. 2009, 94. [Google Scholar] [CrossRef]
- Ma, Q.L.; Rossmann, T.; Guo, Z.X. Whispering-gallery mode silica microsensors for cryogenic to room temperature measurement. Meas. Sci. Technol. 2010, 21. [Google Scholar] [CrossRef]
- Wang, X.P.; Yin, C.; Sun, J.J.; Li, H.G.; Wang, Y.; Ran, M.W.; Cao, Z.Q. High-sensitivity temperature sensor using the ultrahigh order mode-enhanced Goos-Hänchen effect. Opt. Express 2013, 21, 13380–13385. [Google Scholar] [CrossRef] [PubMed]
- Ozdemir, S.K.; Turban-Sayan, G. Temperature effects on surface plasmon resonance: Design considerations for an optical temperature sensor. J. Lightwave Technol. 2003, 21, 805–814. [Google Scholar] [CrossRef]
- Chiang, H.-P.; Yeh, H.T.; Chen, C.M.; Wu, J.C.; Su, S.Y.; Chang, R.; Wu, Y.J.; Tsai, D.P.; Jen, S.U.; Leung, P.T. Surface plasmon resonance monitoring of temperature via phase measurement. Opt. Commun. 2004, 241, 409–418. [Google Scholar]
- Davis, L.J.; Deutsch, M. Surface plasmon based thermo-optic and temperature sensor for microfluidic thermometry. Rev. Sci. Instrum. 2010, 81. [Google Scholar] [CrossRef]
- Homola, J. Surface plasmon resonance sensors for detection of chemical and biological species. Chem. Rev. 2008, 108, 462–492. [Google Scholar] [CrossRef] [PubMed]
- Sun, Z.L.; He, Y.H.; Guo, J.H. Surface plasmon resonance sensor based on polarization interferometry and angle modulation. Appl. Opt. 2006, 45, 3071–3076. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.Y.; Yang, L.; Liu, L.; Chong, X.Y.; Guo, J.; Ma, S.H.; Ji, Y.H.; He, Y.H. Parallel-scan based microarray imager capable of simultaneous surface plasmon resonance and hyperspectral fluorescence imaging. Biosens. Bioelectron. 2011, 30, 180–187. [Google Scholar] [CrossRef] [PubMed]
- Zhang, P.F.; Liu, L.; He, Y.H.; Shen, Z.Y.; Guo, J.; Ji, Y.H.; Ma, H. Non-scan and real-time multichannel angular surface plasmon resonance imaging method. Appl. Opt. 2014, 53, 6037–6042. [Google Scholar] [CrossRef] [PubMed]
- Shankar, P.; Viswanathan, N.K. All-optical thermo-plasmonic device. Appl. Opt. 2011, 50, 5966–5969. [Google Scholar] [CrossRef] [PubMed]
- Chiang, H.-P.; Chen, C.-W.; Wu, J.-J.; Li, H.-L.; Lin, T.-Y.; Sanchez, E.-J.; Leung, P.-T. Effects of temperature on the surface plasmon resonance at a metal-semiconductor interface. Thin Solid Films 2007, 515, 6953–6961. [Google Scholar] [CrossRef]
- Moreira, C.S.; Lima, A.M.N.; Neff, H.; Thirstrup, C. Temperature-dependent sensitivity of surface plasmon resonance sensors at the gold-water interface. Sens. Actuators B 2008, 134, 854–862. [Google Scholar] [CrossRef]
- Sharma, A.K.; Pattanaik, H.S.; Mohr, J.G. On the temperature sensing capability of a fibre optic SPR mechanism based on bimetallic alloy nanoparticles. J. Phys. D Appl. Phys. 2009, 42. [Google Scholar] [CrossRef]
- Kim, I.T.; Kihm, K.D. Full-field and real-time surface plasmon resonance imaging thermometry. Opt. Lett. 2007, 32, 3456–3458. [Google Scholar] [CrossRef] [PubMed]
- Shao, L.; Shevchenko, Y.; Albert, J. Intrinsic temperature sensitivity of titled fiber Bragg grating based surface plasmon resonance sensors. Opt. Express 2010, 18, 11464–11471. [Google Scholar] [CrossRef] [PubMed]
- Zhang, P.F.; Liu, L.; He, Y.H.; Xu, Z.H.; Ji, Y.H.; Ma, H. One-dimensional angular surface plasmon resonance imaging based array thermometer. Sens. Actuators B 2015, 207, 254–261. [Google Scholar] [CrossRef]
- Liu, L.; Ma, S.H.; Ji, Y.H.; Chong, X.Y.; Liu, Z.Y.; He, Y.H.; Guo, J.H. A two-dimensional polarization interferometry based parallel scan angular surface plasmon resonance biosensor. Rev. Sci. Instrum. 2011, 82. [Google Scholar] [CrossRef]
- Lahav, A.; Auslender, M.; Abdulhalim, I. Sensitivity enhancement of guided-wave surface-plasmon resonance sensors. Opt. Lett. 2008, 33, 2539–2541. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.F.; Zhang, P.F.; He, Y.H.; Xu, Z.H.; Liu, L.; Ji, Y.H.; Ma, H. Plasmon waveguide resonance sensor using Au-MgF2 structure. Appl. Opt. 2014, 53, 6344–6350. [Google Scholar]
- Chien, F.C.; Chen, S.J. A sensitivity comparison of optical biosensors based on four different surface plasmon resonance modes. Biosens. Bioelectron. 2004, 20, 633–642. [Google Scholar] [CrossRef] [PubMed]
- Bahrami, F.; Maisonneuve, M.; Meunier, M.; Aitchison, J.S.; Mojahedi, M. An improved refractive index sensor based on genetic optimization of plasmon waveguide resonance. Opt. Express 2013, 21. [Google Scholar] [CrossRef] [PubMed]
- Szunerits, S.; Boukherroub, R. Electrochemical investigation of gold/silica thin film interfaces for electrochemical surface plasmon resonance studies. Electrochem. Commun. 2006, 8, 439–444. [Google Scholar] [CrossRef]
- Kretschmann, E.; Raether, H. Radiative decay of nonradiative surface plasmons excited by light. Z. Naturforsch. A 1968, 23, 2135–2136. [Google Scholar]
- Bahrami, F.; Maisonneuve, M.; Meunier, M.; Aitchison, J.S.; Mojahedi, M. Self-referenced spectroscopy using plasmon waveguide resonance biosensor. Biomed. Opt. Express 2014, 5, 2481–2487. [Google Scholar] [CrossRef]
- Heavens, O.S. Optical properties of thin films. Rep. Prog. Phys. 1960, 23, 1–65. [Google Scholar] [CrossRef]
- Born, M.; Wolf, E. Principles of Optics: Electromagnetic Theory of Propagation, Interference and Diffraction of Light, 7th ed.; Cambridge University: Cambridge, UK, 1999. [Google Scholar]
- Shi, H.; Liu, Z.Y.; Wang, X.X.; Guo, J.; Liu, L.; Luo, L.; Guo, J.H.; Ma, H.; Sun, S.Q.; He, Y.H. A symmetrical optical waveguide based surface plasmon resonance biosensing system. Sens. Actuators B 2013, 185, 91–96. [Google Scholar] [CrossRef]
- Hansen, W.N. Electric fields produced by the propagation of plane coherent electromagnetic radiation in a stratified medium. J. Opt. Soc. Am. 1968, 58, 380–390. [Google Scholar] [CrossRef]
- Nenninger, G.G.; Tobiška, P.; Homola, J.; Yee, S.S. Long-range surface plasmons for high-resolution surface plasmon resonance sensors. Sens. Actuators B 2001, 74, 145–151. [Google Scholar] [CrossRef]
- Purcell, E.M.; Morin, D.J. Electricity and Magnetism, 3rd ed.; Cambridge University: Cambridge, UK, 2013. [Google Scholar]
- Feynman, R.P.; Leighton, R.B.; Sands, M. The Feynman Lectures on Physics; Addison-Wesley: Boston, MA, USA, 1963. [Google Scholar]
- Kittel, C.; McEuen, P. Introduction to Solid State Physics; Wiley: New York, NY, USA, 1976. [Google Scholar]
- Schiebener, P.; Straub, J.; Sengers, J.M.H.L.; Gallagher, J.S. Refractive index of water and steam as function of wavelength, temperature and density. J. Phys. Chem. Ref. Data 1990, 19, 677–717. [Google Scholar] [CrossRef]
- Chiang, H.-P.; Leung, P.-T.; Tse, W.-S. Remarks on the substrate-temperature dependence of surface-enhanced Raman scattering. J. Phys. Chem. B 2000, 104, 2348–2350. [Google Scholar] [CrossRef]
- McKay, J.A.; Rayne, J.A. Temperature dependence of the infrared absorptivity of the noble metals. Phys. Rev. B 1976, 13, 673–684. [Google Scholar] [CrossRef]
- Beach, R.T.; Christy, R.W. Electron-electron scattering in the intraband optical conductivity of Cu, Ag, and Au. Phys. Rev. B 1977, 16, 5277–5284. [Google Scholar] [CrossRef]
- Ballard, S.S.; Browder, J.S. Thermal expansion and other physical properties of the newer infrared-transmitting optical materials. Appl. Opt. 1966, 5, 1873–1876. [Google Scholar] [CrossRef] [PubMed]
- Weber, M.J. Handbook of Optical Materials; CRC Press: Boca Raton, FL, USA, 2003. [Google Scholar]
- Dodge, M.J. Refractive properties of magnesium fluoride. Appl. Opt. 1984, 23, 1980–1985. [Google Scholar] [CrossRef] [PubMed]
- Browder, J.S.; Ballard, S.S. Thermal expansion data for eight optical materials from 60 K to 300 K. Appl. Opt. 1977, 16, 3214–3217. [Google Scholar] [CrossRef] [PubMed]
- Grassi, J.H.; Georgiadis, R.M. Temperature-dependent refractive index determination from critical angle measurements: Implications for quantitative SPR sensing. Anal. Chem. 1999, 71, 4392–4396. [Google Scholar] [CrossRef] [PubMed]
- Chong, X.Y.; Liu, L.; Liu, Z.Y.; Ma, S.H.; Guo, J.; Ji, Y.H.; He, Y.H. Detect the hybridization of single-stranded DNA by parallel scan spectral surface plasmon resonance imaging. Plasmonics 2013, 8, 1185–1191. [Google Scholar] [CrossRef]
- Bahrami, F.; Alam, M.Z.; Aitchison, J.S.; Mojahedi, M. Dual polarization measurements in the hybrid plasmonic biosensors. Plasmonics 2013, 8, 465–473. [Google Scholar] [CrossRef]
- Piliarik, M.; Homola, J. Surface plasmon resonance (SPR) sensors: Approaching their limits? Opt. Express 2009, 17, 16505–16517. [Google Scholar] [CrossRef] [PubMed]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, P.; Liu, L.; He, Y.; Zhou, Y.; Ji, Y.; Ma, H. Noninvasive and Real-Time Plasmon Waveguide Resonance Thermometry. Sensors 2015, 15, 8481-8498. https://doi.org/10.3390/s150408481
Zhang P, Liu L, He Y, Zhou Y, Ji Y, Ma H. Noninvasive and Real-Time Plasmon Waveguide Resonance Thermometry. Sensors. 2015; 15(4):8481-8498. https://doi.org/10.3390/s150408481
Chicago/Turabian StyleZhang, Pengfei, Le Liu, Yonghong He, Yanfei Zhou, Yanhong Ji, and Hui Ma. 2015. "Noninvasive and Real-Time Plasmon Waveguide Resonance Thermometry" Sensors 15, no. 4: 8481-8498. https://doi.org/10.3390/s150408481
APA StyleZhang, P., Liu, L., He, Y., Zhou, Y., Ji, Y., & Ma, H. (2015). Noninvasive and Real-Time Plasmon Waveguide Resonance Thermometry. Sensors, 15(4), 8481-8498. https://doi.org/10.3390/s150408481