In order to assess the contribution of BDS GEO, IGSO, and MEO satellites to PPP in Asia–Pacific region, the BDS only PPP in static as well as GPS and BDS combined PPP in both static and kinematic modes are performed. The corresponding convergence time and positioning errors are analyzed and compared in this section. Furthermore, GPS and GLONASS combined observations are also processed, and the corresponding ambiguity-float and -fixed PPP results are compared with that of GPS and BDS combined solutions in order to further compare the different contribution of BDS and GLONASS to GPS only PPP. In the meantime, the three constellations combined solutions are computed to demonstrate the level of precision and the convergence time achieved. In this section, the convergence time and position errors are used as the indicators of PPP results.
3.1. BDS Only PPP
Considering that exclusion of BDS GEO or IGSO measurements in data processing may not produce sensible kinematic PPP solutions due to the significant bad geometry, it is hard to assess the contribution of individual types of BDS satellites with kinematic BDS only PPP. Hence, the static PPP solutions are performed and investigated using at least two types of BDS satellite.
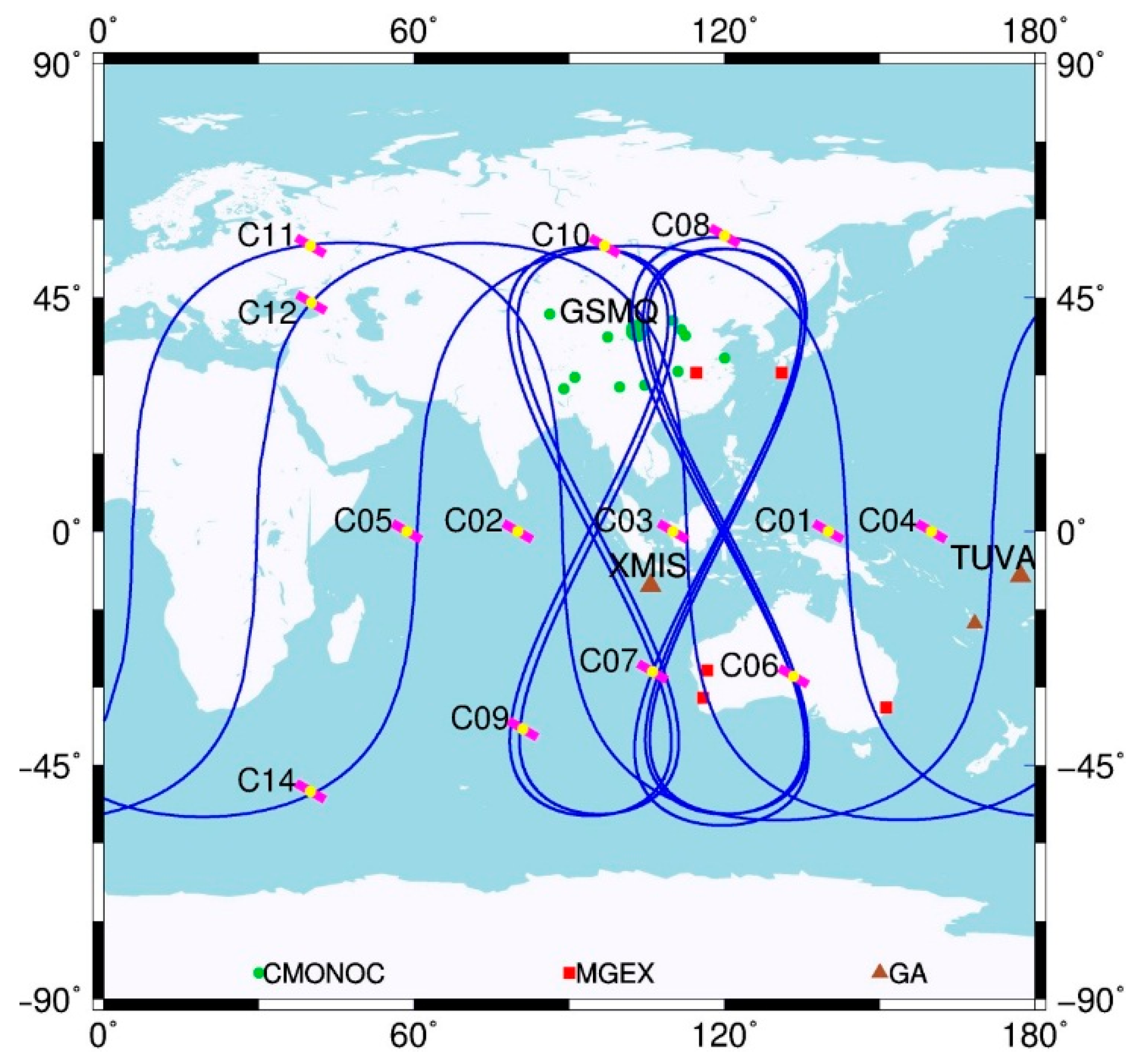
All of the aforementioned sites are used for the result analysis. In the meanwhile, three selected stations named GSMQ, XMIS, and TUVA are, respectively, analyzed in detail, as they represent three typical observation conditions for BDS in Asia–Pacific region. The locations of these three stations are shown in
Figure 1 together with other sites.
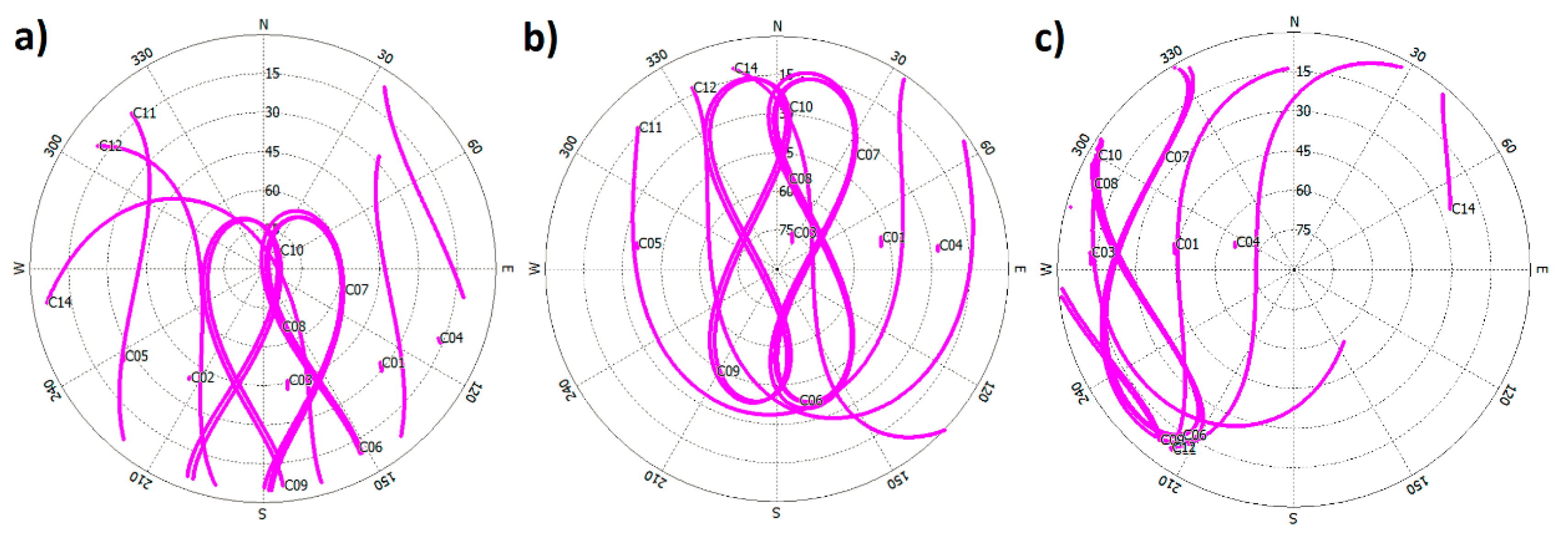
Figure 2 illustrates the BDS satellites sky plots of the three sites. It can be seen that all of the GEO satellites are tracked continuously by GSMQ for the whole day, whereas IGSO satellites are visible for most time of one day (
Figure 2a). This observation condition is similar for most of CMONOC stations. For XMIS (
Figure 2b), all of GEO and IGSO satellites can be tracked continuously for the whole day. Compared with the other two sites, the observation condition for GEO and IGSO satellites is relatively poor in TUVA (
Figure 2c). Specifically, only three GEO satellites could be tracked, and the elevation of C03 is rather low (about 15°). In addition, the five IGSO satellites in two separated orbital planes have almost overlapped trajectories and are located in the low elevation area, resulting in the worse observation condition. For BDS MEO satellites, the observation conditions are similar for the three sites, and the length of tracking session is about 8 h.
Figure 2.
Sky-plots of (a) GSMQ; (b) XMIS; and (c) TUVA on DOY 252 in 2014.
Figure 2.
Sky-plots of (a) GSMQ; (b) XMIS; and (c) TUVA on DOY 252 in 2014.
Table 3 lists the percentages of un-convergent sessions for the three selected sites individually and all sites as a whole in different BDS only static PPP solutions. The corresponding abbreviations can be seen in
Table 2. Generally, the inclusion of BDS satellites in PPP could make more sessions to be converged due to the improved geometric strength. For PPP solutions using all BDS satellites in GSMQ and XMIS, which have good observation condition, all of the sessions are converged at least in 18 h, whereas the un-convergent percentage reaches only 3.3% for TUVA. The exclusion of GEO or MEO satellites in PPP solutions for GSMQ and XMIS will not change the percentage of un-convergence sessions, whereas the percentage increases significantly when the IGSO satellites are not used. Although not all sessions are converged in 18 h for TUVA when any type of satellites is not used for data processing, the GM solution still show the largest un-convergent percentage among GI, GM, and IM solutions. The similar phenomenon is also from the statistical results of all sites. Specifically, the un-convergent percentage is significantly high once IGSO satellites are not used in PPP. This indicates that the IGSO satellites make the greatest contribution to the reduction of convergence time for static BDS only PPP among these three kinds of satellites.
Table 3.
Percentages of un-convergent sessions of static PPP solutions using different combinations of BDS satellites for the three selected individually and all 20 sites as a whole.
Table 3.
Percentages of un-convergent sessions of static PPP solutions using different combinations of BDS satellites for the three selected individually and all 20 sites as a whole.
| SITE | GI | GM | IM | B |
|---|
| GSMQ | 0 | 12.6 | 0 | 0 |
| XMIS | 0 | 29.0 | 0 | 0 |
| TUVA | 25.8 | 45.2 | 16.1 | 3.3 |
| ALL | 2.0 | 21.8 | 1.0 | 0.3 |
Furthermore,
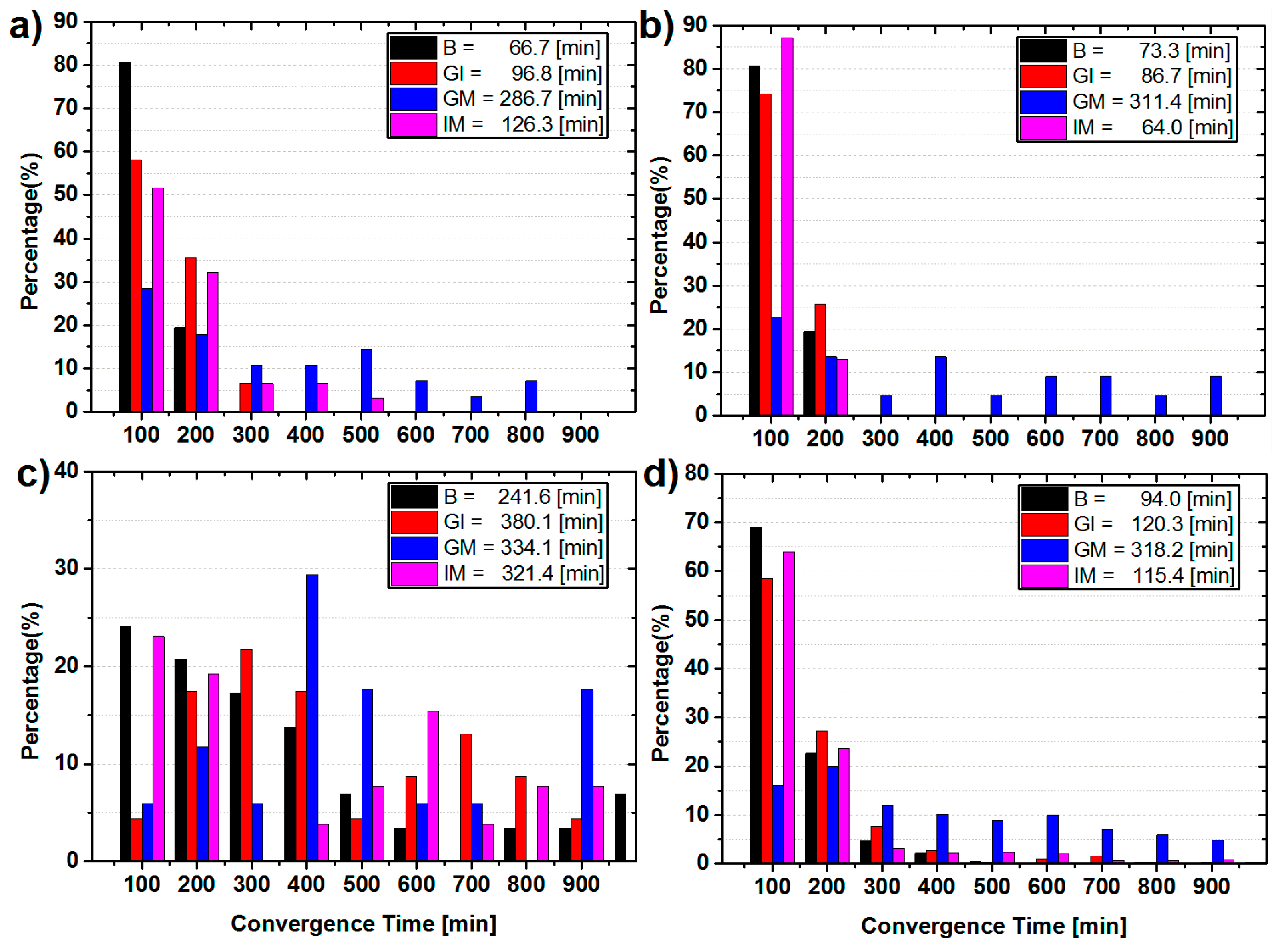
Figure 3 shows the statistical results of convergence time of the static BDS only PPP solutions for the three selected and all sites, respectively. By comparison of the convergence time of the solutions using any two types of satellites and using all BDS satellites, in general, from averaged convergence time for all 20 sites (
Figure 3d), it can be seen that the inclusion of any kinds of BDS satellites can help to accelerate the convergence speed. For GSMQ (
Figure 3a), the averaged convergence time is 66.7 min for PPP with all BDS satellites used, whereas it is 96.8 min for GI solutions, and 286.7 min and 126.3 min for GM and IM solutions, respectively. Similarly, the averaged convergence time of GM solutions for XMIS (
Figure 3b) and all sites (
Figure 3d) are the longest among the corresponding PPP solutions using any two types of satellites. This confirms that IGSO satellites make the largest improvement to the convergence time among the three types again. However, for TUVA (
Figure 3c), the geometric condition of IGSO and GEO satellites is poor, hence, the contributions of IGSO satellites are weak, and the MEO satellites are most essential for PPP in this case.
Figure 3.
Statistics of convergence time in each 100 min and the averaged convergence time for the static BDS only PPP of (a) GSMQ; (b) XMIS; (c) TUVA; and (d) all 20 sites.
Figure 3.
Statistics of convergence time in each 100 min and the averaged convergence time for the static BDS only PPP of (a) GSMQ; (b) XMIS; (c) TUVA; and (d) all 20 sites.
The statistics of positioning errors for the convergent sessions are summarized in
Table 4 for the selected three and all 20 sites, respectively. The standard derivation (STD) and RMS have been used for analysis in this study. For the static solutions, the positioning errors are the differences between the estimated coordinates in the last epoch of each session and the ground truth. Hence, the RMS is actually the root mean square of the positioning errors of all convergent sessions, and the difference between the RMS and STD is used to demonstrate whether there is noticeable positioning bias w.r.t the ground truth. For the kinematic solutions, the epoch-wise coordinates are determined, and the standard STD and RMS are computed with the coordinate differences from the convergent epoch to the last epoch in each session. Hence, the averaged values of STD and RMS from all sessions are used as the corresponding statistical values.
Table 4.
Position error statistics of convergent static PPP solutions using different combinations of BDS satellites for the three selected and all 20 sites.
Table 4.
Position error statistics of convergent static PPP solutions using different combinations of BDS satellites for the three selected and all 20 sites.
| Site | Solution | STD (cm) | RMS (cm) |
|---|
| E | N | U | E | N | U |
|---|
| GSMQ | B | 0.56 | 0.53 | 1.32 | 0.74 | 0.75 | 1.94 |
| GI | 0.68 | 0.66 | 1.69 | 0.71 | 0.80 | 2.54 |
| GM | 2.17 | 1.16 | 2.74 | 2.24 | 1.34 | 2.80 |
| IM | 0.59 | 0.32 | 1.28 | 0.78 | 0.58 | 2.07 |
| XMIS | B | 0.86 | 0.38 | 1.71 | 1.00 | 0.95 | 2.13 |
| GI | 0.76 | 0.37 | 1.51 | 0.89 | 0.99 | 1.86 |
| GM | 2.24 | 0.76 | 2.73 | 2.25 | 0.94 | 3.08 |
| IM | 0.81 | 0.45 | 2.30 | 0.96 | 0.93 | 2.71 |
| TUVA | B | 1.89 | 1.24 | 2.65 | 1.90 | 1.26 | 2.66 |
| GI | 2.48 | 2.87 | 4.74 | 2.68 | 2.95 | 6.12 |
| GM | 2.85 | 0.86 | 3.99 | 2.94 | 1.01 | 4.05 |
| IM | 2.21 | 0.97 | 2.72 | 2.26 | 1.13 | 2.72 |
| ALL | B | 0.78 | 0.57 | 1.82 | 1.05 | 0.76 | 2.38 |
| GI | 1.10 | 0.70 | 2.12 | 1.29 | 0.91 | 2.81 |
| GM | 2.41 | 0.99 | 3.02 | 2.60 | 1.10 | 3.35 |
| IM | 0.84 | 0.49 | 1.86 | 1.11 | 0.70 | 2.59 |
In general, the results of PPP solutions with all BDS satellites are the best. For GSMQ, the positioning accuracy (RMS) is better than 1.0 cm and 2.0 cm in horizontal and vertical component, respectively. However, the positioning accuracy significantly decreases, particular in the east, once observables of IGSO satellites are not used for PPP solutions. Specifically, the degradation is about 1.50 cm, 0.59 cm, and 0.86 cm in the east, north, and vertical component, respectively. The overall statistics of all sites and site XMIS confirm this as well. This demonstrates the largest contribution of IGSO among three types of BDS satellites to the accuracy of static BDS only PPP, and the most contribution is in the east component. Considering that the positioning accuracy in east direction is highly related to the ambiguities, the continuous IGSO tracking by sites in Asia–Pacific region results in relative longer sessions of ambiguity parameters and sufficient geometric changes. Therefore, the corresponding ambiguities are relatively easier to be separated with other parameters, resulting in improvement of the positioning accuracy in the east direction. For TUVA, MEO satellites still play the most important role in PPP processing, and the noticeable degradation (about 3.46 cm) in vertical component has been observed when MEO observations are not used. The above conclusions are similar as that revealed by the analysis of convergence time in
Figure 3.
3.2. Combination of GPS, GLONASS, and BDS for PPP Solutions
For the GPS based PPP solution, the addition of other satellites in processing will enhance the geometric strength, resulting in improvement of the positioning accuracy potentially. The performances of combined PPP are mainly guaranteed by GPS observations as to our investigation, and it will be shown later. In this section, we consider solutions of ten cases: GPS only, GPS + BDS, GPS + GLONASS, GPS + GLONASS and BeiDou IGSO, MEO, GPS + BDS GEO, GPS + BDS IGSO, GPS + BDS MEO, GPS + BDS GEO and IGSO, GPS + BDS GEO and MEO, and finally GPS + BDS IGSO and MEO. The corresponding abbreviations can be seen in
Table 2. The performances of static and kinematic solutions for all sites are analyzed and compared. The analysis is still based on the convergence time and positioning accuracy.
3.2.1. Ambiguity-Float PPP Solution
In this section, the impacts of BDS and GLONASS observations on the GPS ambiguity-float PPP are analyzed.
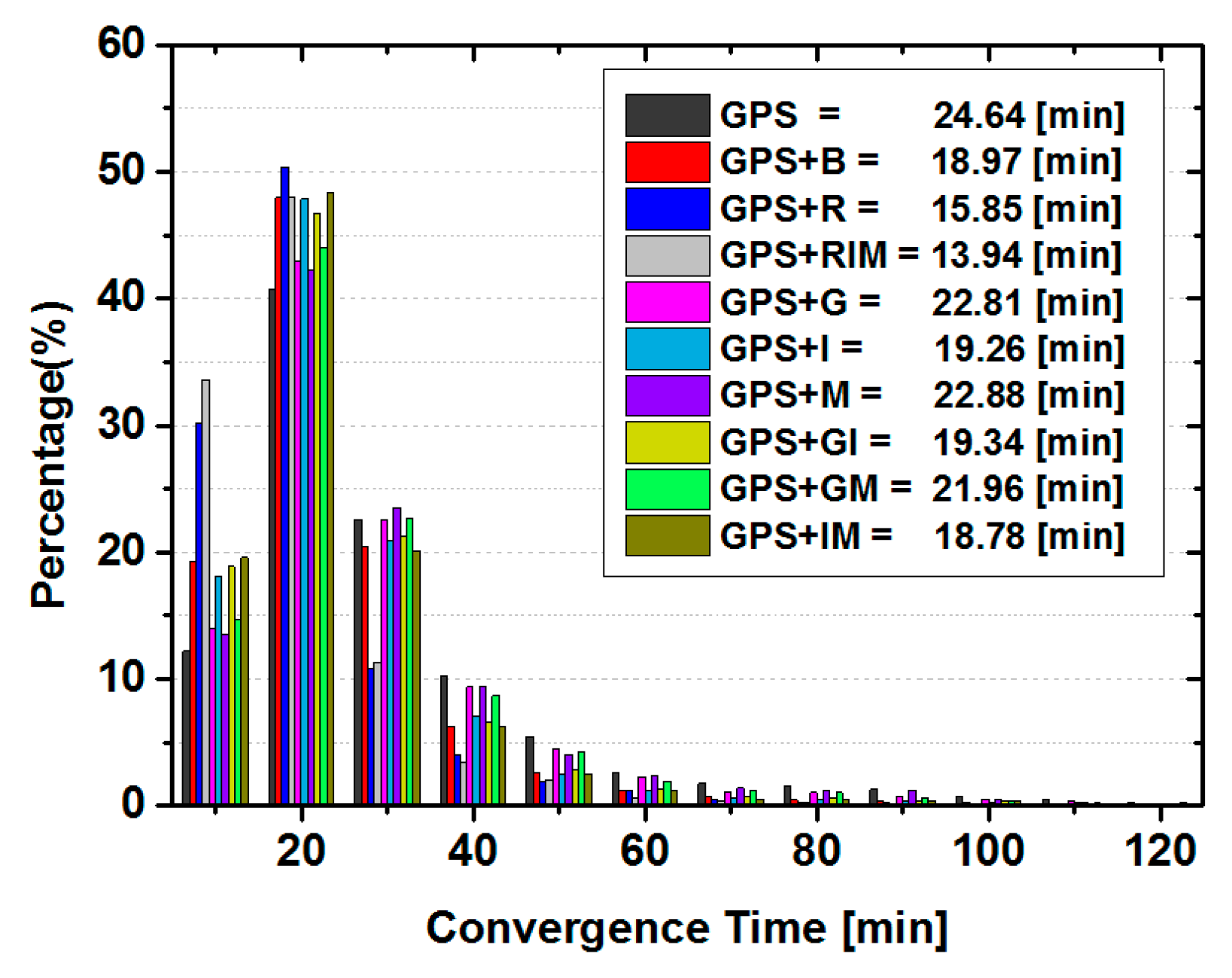
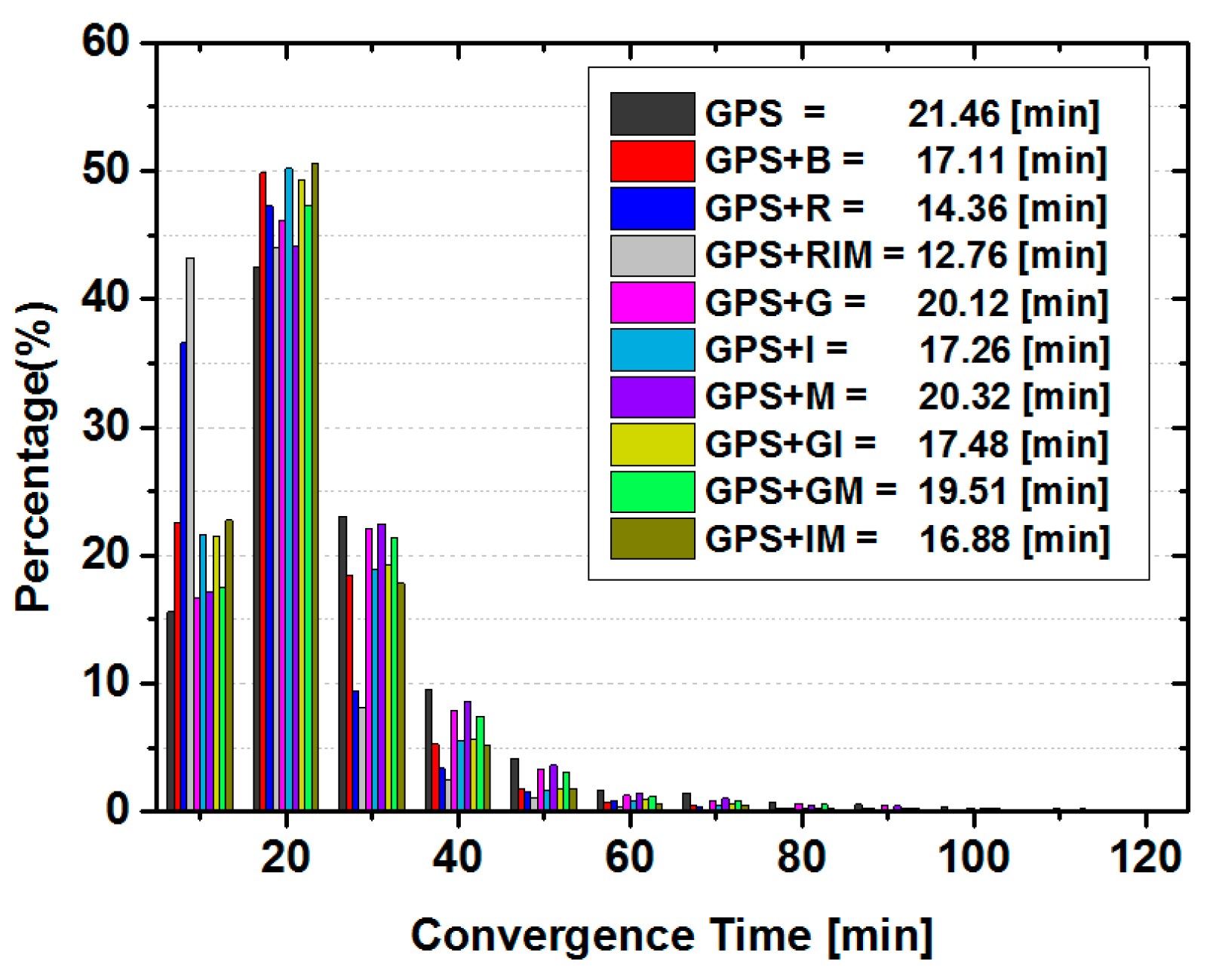
Figure 4 demonstrates the percentage of convergence sessions in each 10 min period and the averaged convergence time for all static solutions computed from the aforementioned sites. As can be seen, different with that of BDS only static PPP, the convergence time is shorter, ranging from 0 to 50 min for most GPS only PPP solutions (about 95%). Only in occasional cases, when the solutions suffer from relatively few GPS satellites or bad data quality, the convergence time is longer than 50 min. Compared to the GPS only solution, the inclusion of any single type of BDS satellites accelerates the convergence speed to 22.81 min, 19.26 min and 22.88 min from 24.64 min for GPS + G, GPS + I, and GPS + M solutions, respectively. Again, IGSO satellites make the largest reduction to the convergence time. Compared the averaged convergence times of GPS + I solutions with that of GPS + GI, and GPS + B with GPS + IM solutions, it can be seen that the averaged convergence time become slightly longer after adding the GEO satellites. This indicates that GEO satellites might have the potential to slow the convergence speed of the GPS combined static PPP solutions once the IGSO observations are also used. However, the contamination is rather minor, at least with the strategy used in this contribution.
On the other hand, once the GLONASS or BDS observations are combined with GPS, almost all PPP sessions are converged in 50 min thanks to better observation condition. The averaged convergence time is 24.64 min for GPS only PPP, while it is 18.97 min and 15.85 min for G + B and G + R solutions, respectively. However, only 1.91 min has been reduced when BDS IGSO and MEO are added in GPS and GLONASS combined PPP. Hence, those demonstrate that GLONASS makes larger reduction to the convergence time of GPS based combined PPP solutions than that of BDS, but the combination of the three GNSS systems could obtain the shortest convergence time among all these solutions.
Figure 4.
Statistics of convergence time in each 10 min and the averaged convergence time for the static ambiguity-float PPP solutions of all sites.
Figure 4.
Statistics of convergence time in each 10 min and the averaged convergence time for the static ambiguity-float PPP solutions of all sites.
Table 5 lists the statistics of positioning errors of all static PPP solutions computed from 20 sites. It can be seen that the positioning accuracy in each component is improved after adding either IGSO or MEO satellites to the PPP solutions. Although the accuracy in the east component is improved when GEO observables are combined with GPS data for PPP, it decreases slightly in other two directions. When we compare the position errors of GPS + I solutions with that of GPS + GI ones and GPS + B with GPS + IM solutions, it can be found that the positioning errors in each component become slightly larger after adding the GEO satellites. These are similar as that of convergence time. This indicates that GEO satellites also have the potential to contaminate the accuracy of the GPS and BDS IGSO combined static PPP solutions slightly. Compared the GPS + R solutions and GPS + I or GPS + IM solution, which are the best GPS and BDS combined solutions, it seems that the accuracy improvement in the vertical direction by inclusion of GLONASS observations is still larger than that of BDS. For other two components, BDS IGSO and MEO satellites make similar contribution to the accuracy as GLONASS satellites do. The GPS + RIM solution has the highest positioning accuracy among these ten solutions, while the accuracy improvement w.r.t GPS + R is mainly in the horizontal direction.
Table 5.
Position error statistics of convergent static GPS ambiguity-float PPP solutions for all 20 sites.
Table 5.
Position error statistics of convergent static GPS ambiguity-float PPP solutions for all 20 sites.
| TYPE | STD (cm) | RMS (cm) |
|---|
| E | N | U | E | N | U |
|---|
| GPS | 1.32 | 0.63 | 1.69 | 1.64 | 0.81 | 1.98 |
| GPS + B | 1.11 | 0.60 | 1.63 | 1.39 | 0.78 | 1.97 |
| GPS + R | 1.01 | 0.56 | 1.55 | 1.29 | 0.76 | 1.87 |
| GPS + RIM | 0.84 | 0.53 | 1.32 | 1.16 | 0.73 | 1.69 |
| GPS + G | 1.31 | 0.66 | 1.75 | 1.60 | 0.83 | 2.02 |
| GPS + I | 0.98 | 0.57 | 1.57 | 1.29 | 0.77 | 1.93 |
| GPS + M | 1.26 | 0.61 | 1.67 | 1.57 | 0.80 | 1.96 |
| GPS + GI | 1.12 | 0.61 | 1.68 | 1.41 | 0.79 | 2.00 |
| GPS + GM | 1.30 | 0.64 | 1.72 | 1.58 | 0.83 | 2.01 |
| GPS + IM | 1.01 | 0.57 | 1.59 | 1.30 | 0.77 | 1.93 |
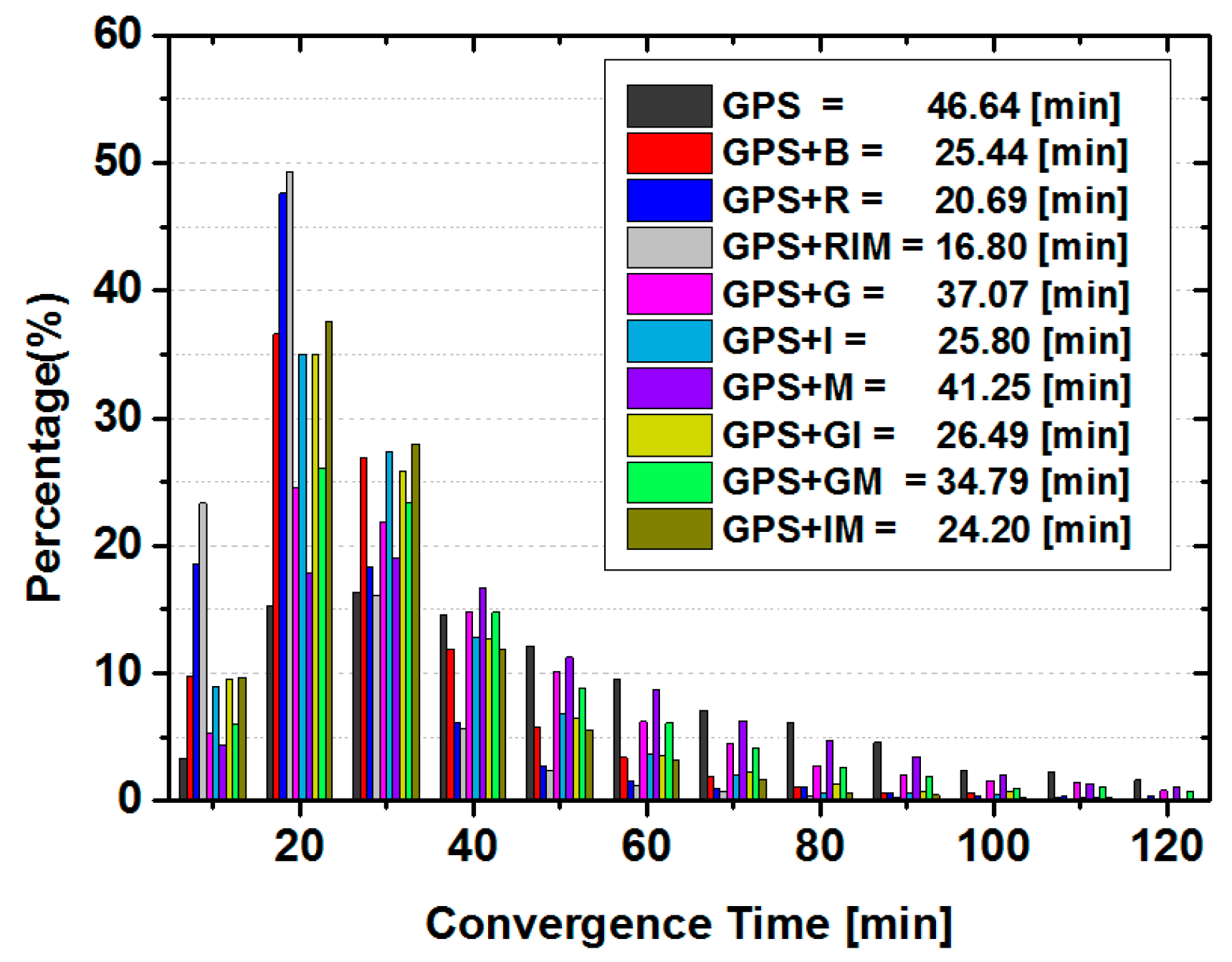
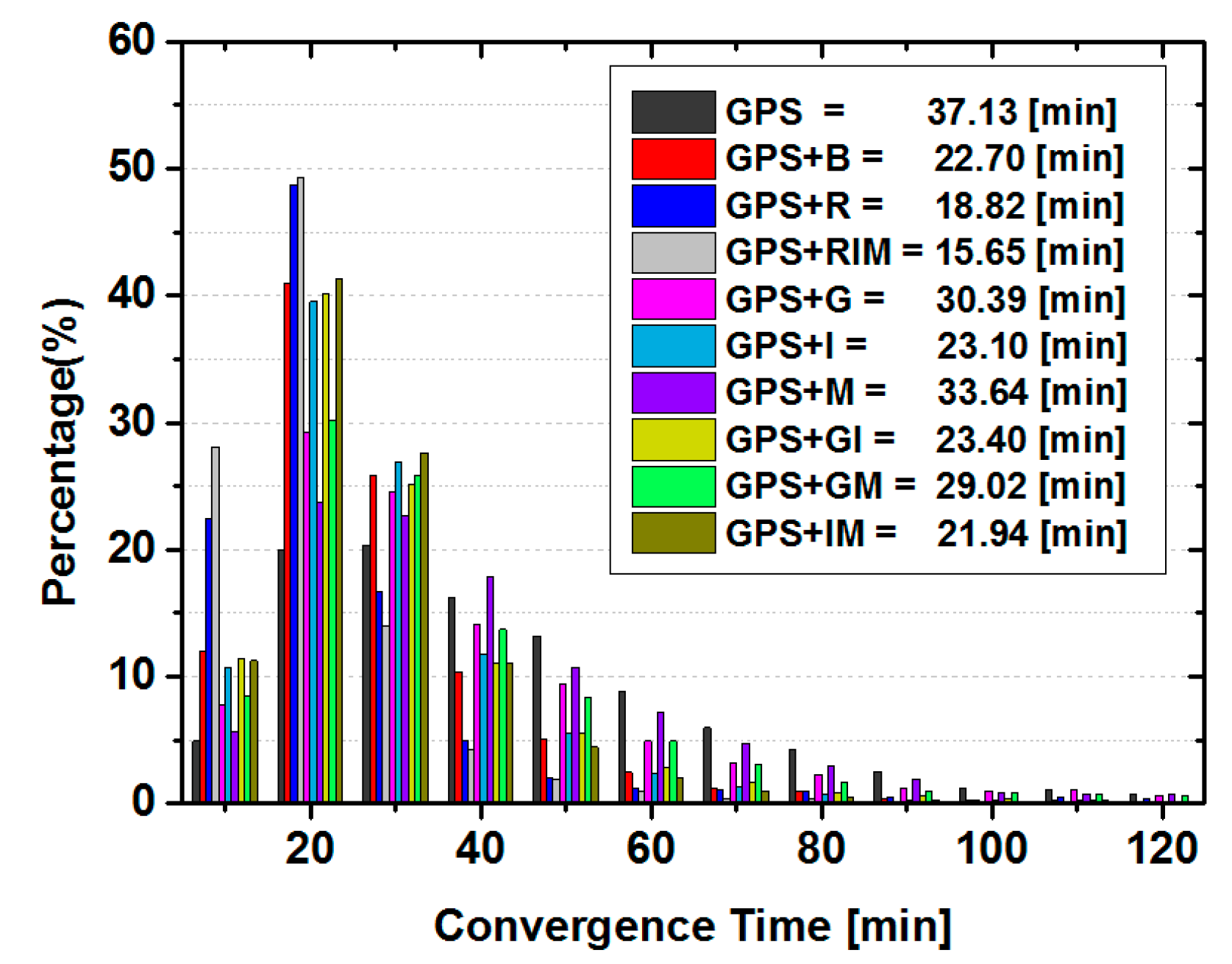
For kinematic ambiguity-float PPP, the corresponding statistic results for convergence time are plotted in
Figure 5. Due to the fact that position parameters are estimated in epoch-wise, the averaged convergence time of kinematic PPP is significantly longer than that of static PPP for both GPS only and all different combined solutions. Similar as that of static PPP, the inclusion of any single type of BDS satellites to GPS PPP (
i.e., GPS + I, GPS + M, GPS + G solutions) accelerates the convergence, and the GPS + I solutions converge fastest among three solutions. However, once GEO satellites are introduced to GPS + I or GPS + IM solutions, the averaged convergence time of GPS + GI and GPS + B solution slightly increase. The averaged convergence time is 46.64 min for GPS only PPP, whereas only 25.44 min, 20.69 min and 16.80 min for GPS + B, GPS + R, and GPS + RIM solutions, respectively. It is reduced significantly by 45.5%, 55.6% and 64.0%, thanks to the significant enhancement of geometric strength and redundancy by extra satellites in kinematic mode.
Figure 5.
Statistics of convergence time in each 10 min and the averaged convergence time of the kinematic ambiguity-float PPP solutions for all sites.
Figure 5.
Statistics of convergence time in each 10 min and the averaged convergence time of the kinematic ambiguity-float PPP solutions for all sites.
As for the statistics of positioning errors listed in
Table 6, it can be seen that the BDS IGSO contributes most to the positioning accuracy among three kinds of BDS satellites by the comparison of GPS + G, GPS + I, and GPS + M solutions. Furthermore, the positioning accuracy could also be contaminated slightly by inclusion of GEO satellites to GPS and IGSO combined PPP solutions,
i.e., GPS + I and GPS + IM. Those results confirm the conclusion drawn from the static PPP solutions. The accuracy improvement in the vertical direction by combination of GLONASS and GPS is greater than that of BDS and GPS combined solution, whereas similar accuracy in horizontal direction has been achieved for GPS + R and GPS + IM solution. Finally, the GPS + RIM solution has the fastest convergence speed and highest positioning accuracy.
Table 6.
Position error statistics of convergent kinematic ambiguity-float PPP solutions for all 20 sites.
Table 6.
Position error statistics of convergent kinematic ambiguity-float PPP solutions for all 20 sites.
| TYPE | STD (cm) | RMS (cm) |
|---|
| E | N | U | E | N | U |
|---|
| GPS | 1.87 | 1.08 | 2.59 | 2.38 | 1.27 | 3.00 |
| GPS + B | 1.17 | 0.77 | 2.20 | 1.66 | 0.99 | 2.71 |
| GPS + R | 1.03 | 0.69 | 1.86 | 1.44 | 0.89 | 2.22 |
| GPS + RIM | 0.86 | 0.61 | 1.71 | 1.23 | 0.83 | 2.13 |
| GPS + G | 1.67 | 0.96 | 2.52 | 2.21 | 1.16 | 2.90 |
| GPS + I | 1.09 | 0.78 | 2.01 | 1.53 | 0.98 | 2.51 |
| GPS + M | 1.72 | 1.01 | 2.45 | 2.23 | 1.19 | 2.87 |
| GPS + GI | 1.22 | 0.81 | 2.25 | 1.72 | 1.03 | 2.77 |
| GPS + GM | 1.61 | 0.93 | 2.46 | 2.15 | 1.12 | 2.84 |
| GPS + IM | 1.04 | 0.74 | 1.94 | 1.47 | 0.95 | 2.43 |
3.2.2. Ambiguity-Fixed PPP Solutions
In this section, the impacts of BDS and GLONASS observations to aid GPS ambiguity-fixed PPP are analyzed. The solutions are produced in the same way as the ambiguity-float ones. It should be mentioned that the fixing ambiguity strategy is only applied to GPS satellites. In order to do so, the additional FCB corrections are applied to GPS satellites. We also computed static and kinematic PPP solutions in this section.
Statistical results of the convergence time are plotted in
Figure 6 for static PPP solutions. It can be seen that the convergence time of each solution is reduced when the GPS float ambiguities are fixed to the integers by comparison with the float results in
Figure 4. The GEO satellites slightly slow the convergence of combined solutions when IGSO observations are also used. The convergence is accelerated more by introduction of GLONASS satellites than BDS ones.
Figure 6.
Distribution of convergence time in each 10 min and the averaged convergence time for the static GPS ambiguity-fixed PPP solutions for all sites.
Figure 6.
Distribution of convergence time in each 10 min and the averaged convergence time for the static GPS ambiguity-fixed PPP solutions for all sites.
The corresponding position errors are listed in
Table 7. Different with the results of float-ambiguity solutions in
Figure 4, the inclusion of any a single type of BDS observables does only improve the positioning accuracy in the east component. The other two components do not show significant differences. However, the positioning accuracy in all three directions is improved by adding GLONASS.
Table 7.
Position error statistics of convergent static GPS ambiguity-fixed PPP solutions for all 20 sites.
Table 7.
Position error statistics of convergent static GPS ambiguity-fixed PPP solutions for all 20 sites.
| TYPE | STD (cm) | RMS (cm) |
|---|
| E | N | U | E | N | U |
|---|
| GPS | 0.82 | 0.54 | 1.52 | 1.16 | 0.75 | 1.80 |
| GPS + B | 0.72 | 0.53 | 1.53 | 1.06 | 0.74 | 1.88 |
| GPS + R | 0.63 | 0.51 | 1.28 | 1.02 | 0.73 | 1.59 |
| GPS + RIM | 0.56 | 0.49 | 1.25 | 0.94 | 0.72 | 1.52 |
| GPS + G | 0.79 | 0.56 | 1.57 | 1.15 | 0.77 | 1.85 |
| GPS + I | 0.60 | 0.52 | 1.47 | 0.98 | 0.74 | 1.83 |
| GPS + M | 0.74 | 0.54 | 1.50 | 1.10 | 0.75 | 1.80 |
| GPS + GI | 0.66 | 0.52 | 1.53 | 1.02 | 0.74 | 1.88 |
| GPS + GM | 0.80 | 0.55 | 1.55 | 1.14 | 0.76 | 1.84 |
| GPS + IM | 0.63 | 0.51 | 1.48 | 0.99 | 0.73 | 1.84 |
For the kinematic solutions, the statistical results of convergence time and positioning accuracy are shown in
Figure 7 and
Table 8, respectively. Compared with that of ambiguity-fixed static PPP solutions in
Figure 6, the convergence time is longer and the accuracy is relatively low. However, the same conclusion for different contribution of different types of BDS satellites as well as BDS as a whole and GLONASS satellites to the convergence time and positioning accuracy can also be drawn.
Figure 7.
Distribution of convergence time in each 10 min and the averaged convergence time of the kinematic GPS ambiguity-fixed PPP solutions for all sites.
Figure 7.
Distribution of convergence time in each 10 min and the averaged convergence time of the kinematic GPS ambiguity-fixed PPP solutions for all sites.
Table 8.
Position error statistics of convergent kinematic ambiguity-fixed PPP solutions for all 20 sites.
Table 8.
Position error statistics of convergent kinematic ambiguity-fixed PPP solutions for all 20 sites.
| TYPE | STD (cm) | RMS (cm) |
|---|
| E | N | U | E | N | U |
|---|
| GPS | 1.57 | 0.98 | 2.40 | 1.64 | 1.02 | 2.54 |
| GPS + B | 1.02 | 0.71 | 2.15 | 1.22 | 0.84 | 2.43 |
| GPS + R | 0.85 | 0.65 | 1.81 | 1.08 | 0.78 | 2.07 |
| GPS + RIM | 0.69 | 0.57 | 1.65 | 0.98 | 0.75 | 2.03 |
| GPS + G | 1.46 | 0.89 | 2.44 | 1.56 | 0.95 | 2.61 |
| GPS + I | 0.89 | 0.70 | 1.91 | 1.10 | 0.82 | 2.24 |
| GPS + M | 1.42 | 0.92 | 2.29 | 1.53 | 0.97 | 2.46 |
| GPS + GI | 1.06 | 0.74 | 2.20 | 1.26 | 0.86 | 2.49 |
| GPS + GM | 1.40 | 0.86 | 2.40 | 1.52 | 0.93 | 2.58 |
| GPS + IM | 0.84 | 0.67 | 1.86 | 1.07 | 0.80 | 2.20 |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}