
Identification of Buried Objects in GPR Using Amplitude Modulated Signals Extracted from Multiresolution Monogenic Signal Analysis


Abstract
:
1. Introduction
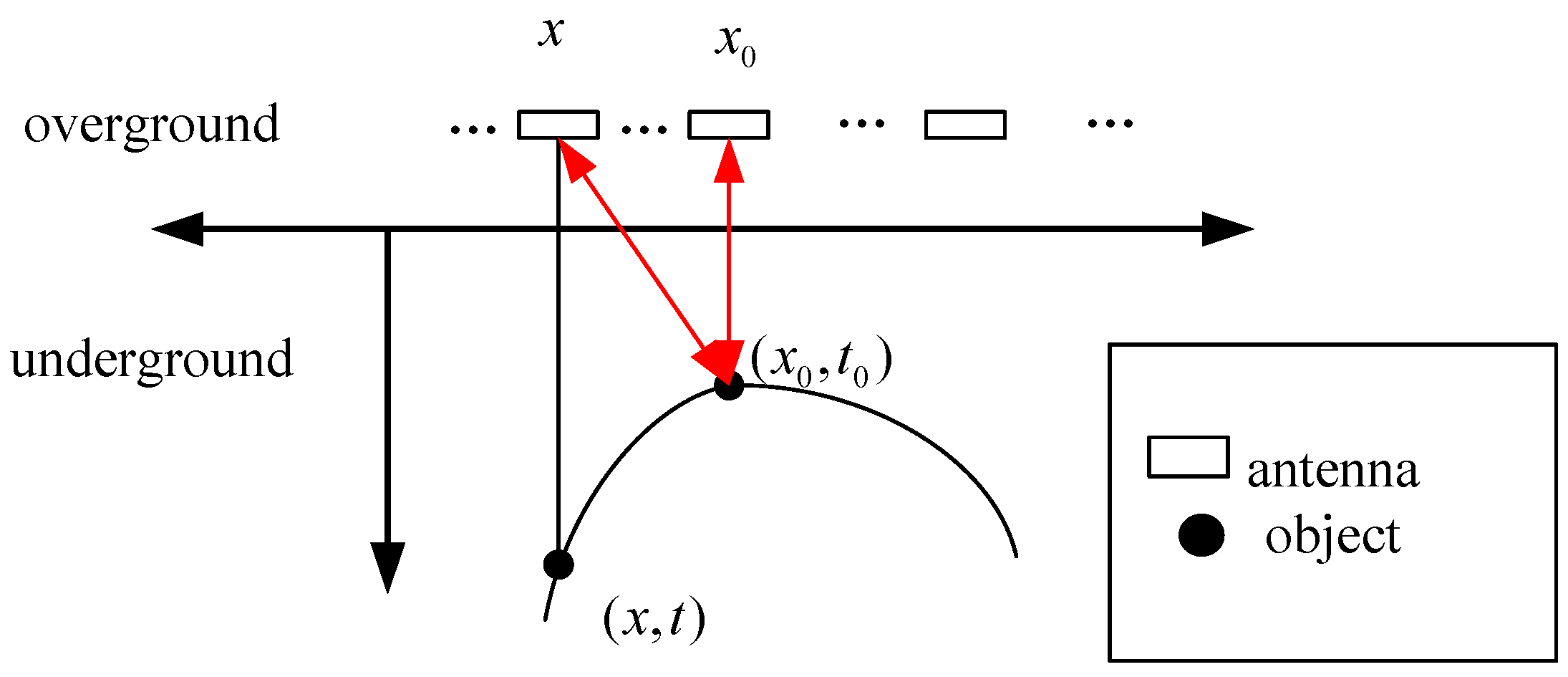
2. Reflection Model of a Buried Object

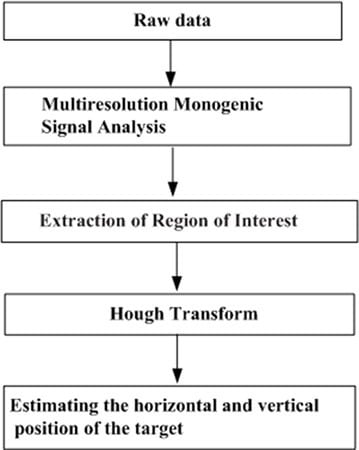
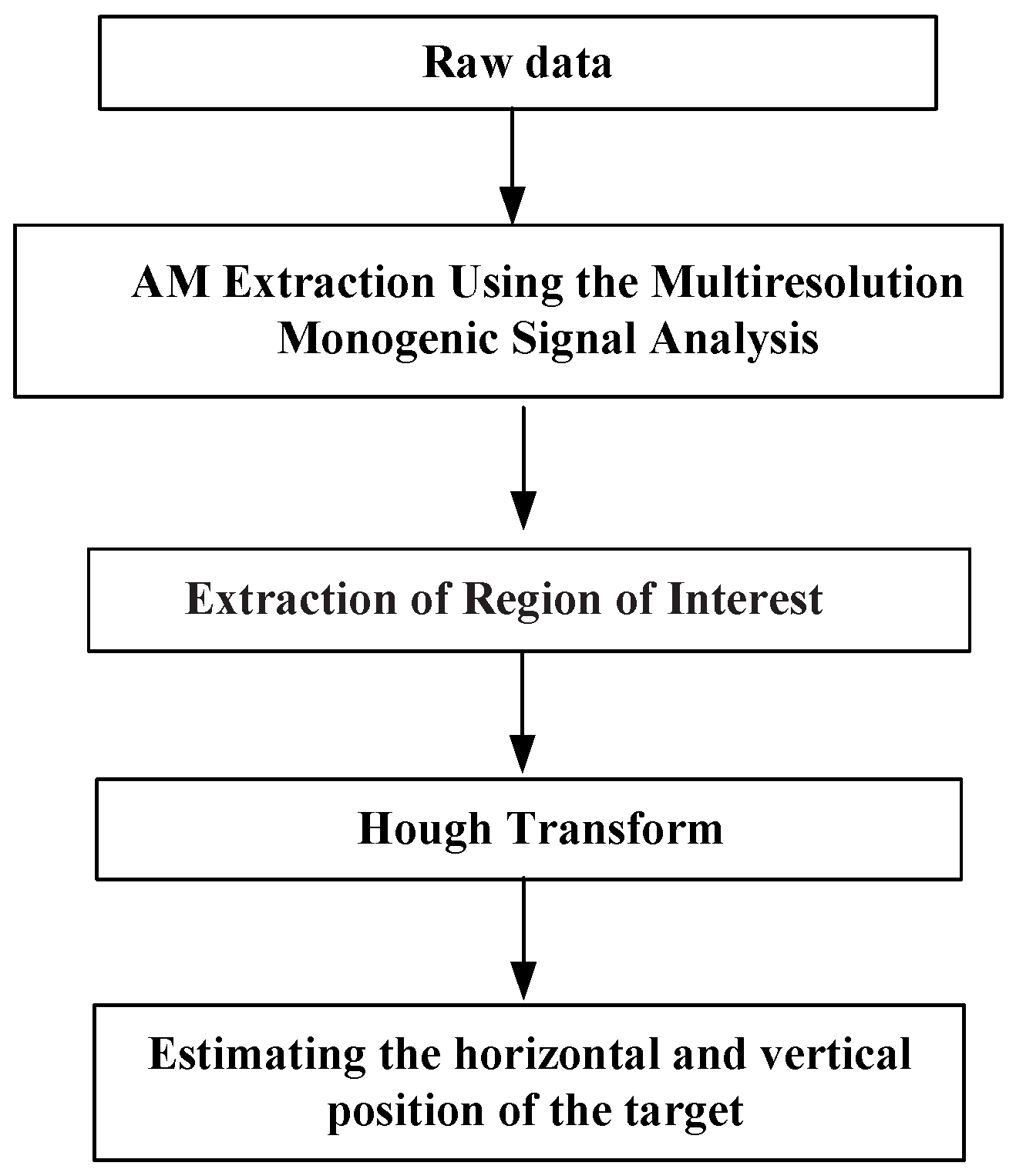
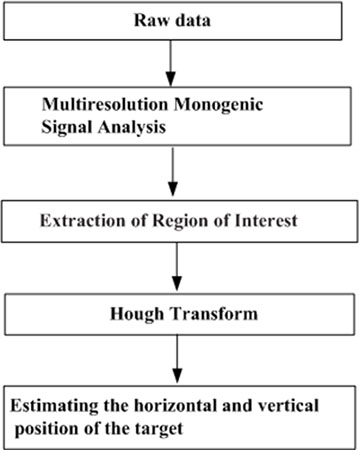
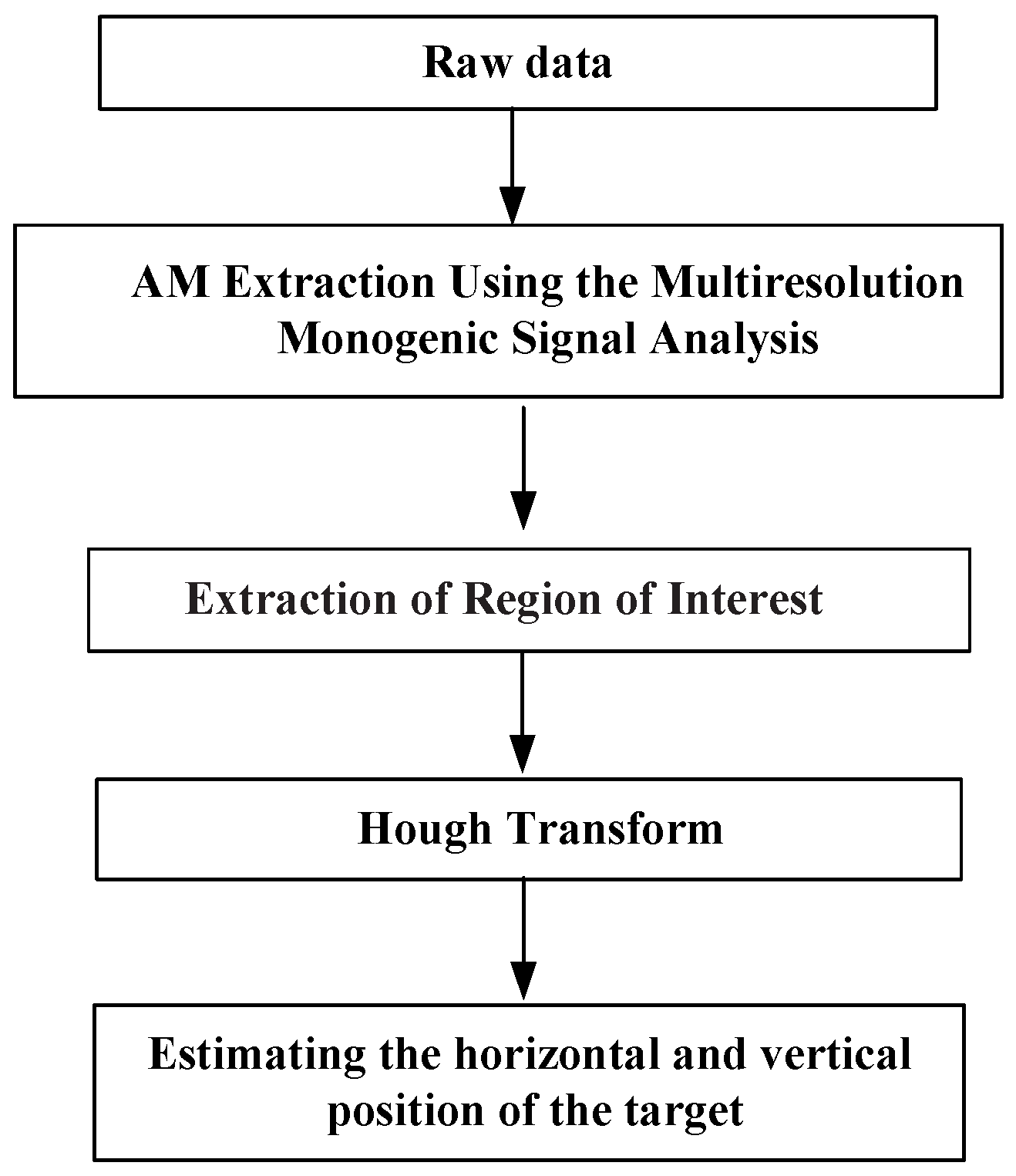
3. Detection Algorithm
- Extract the amplitude components using the MMSA method;
- Extract the Region of Interest to narrow down the region to certain areas;
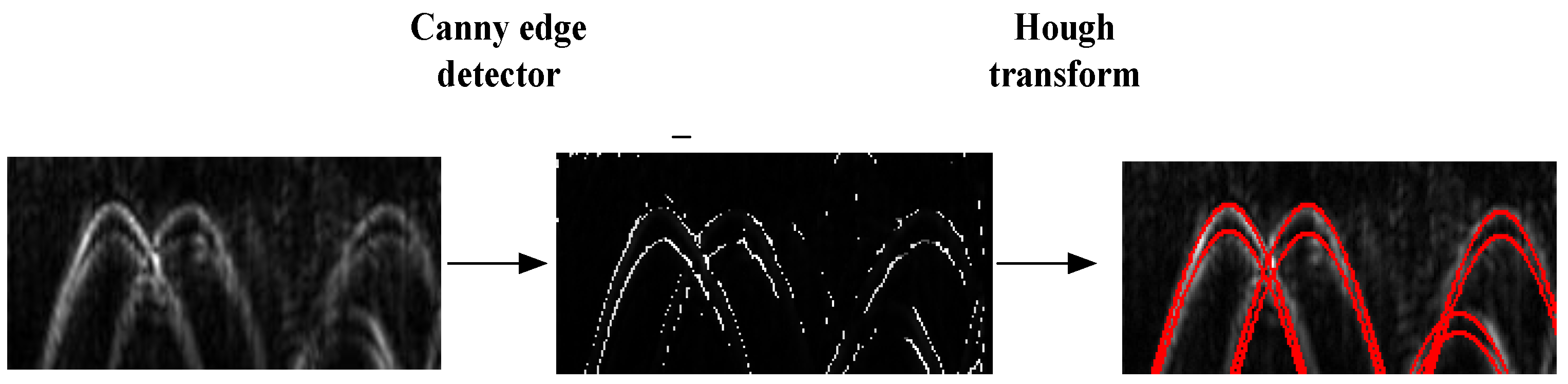
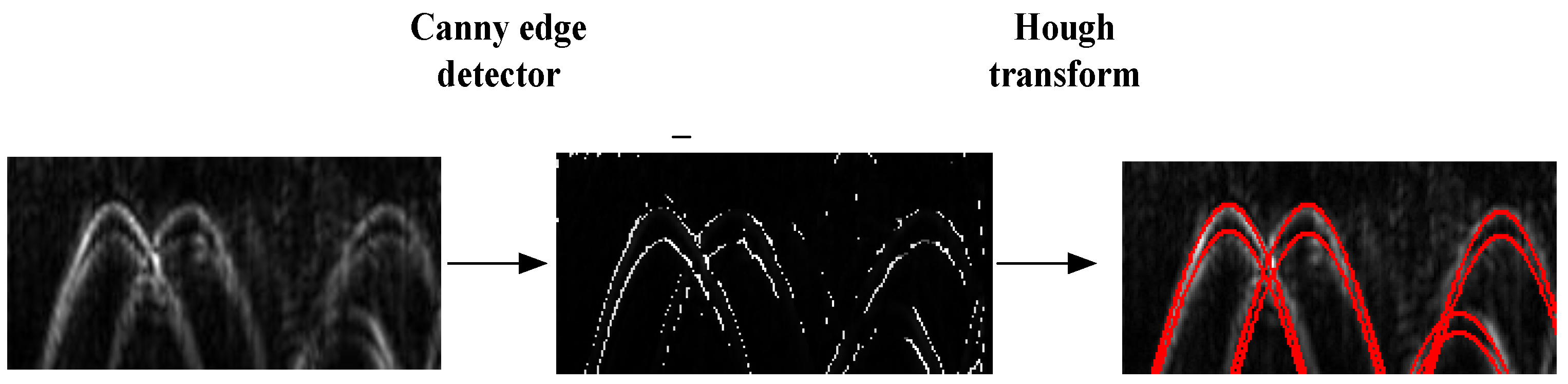
- Locate hyperbolic patterns via a Hough transformation;
- Estimate the horizontal and vertical position of the target.
3.1. Preprocessing Based on the Multiresolution Monogenic Signal Analysis Structure
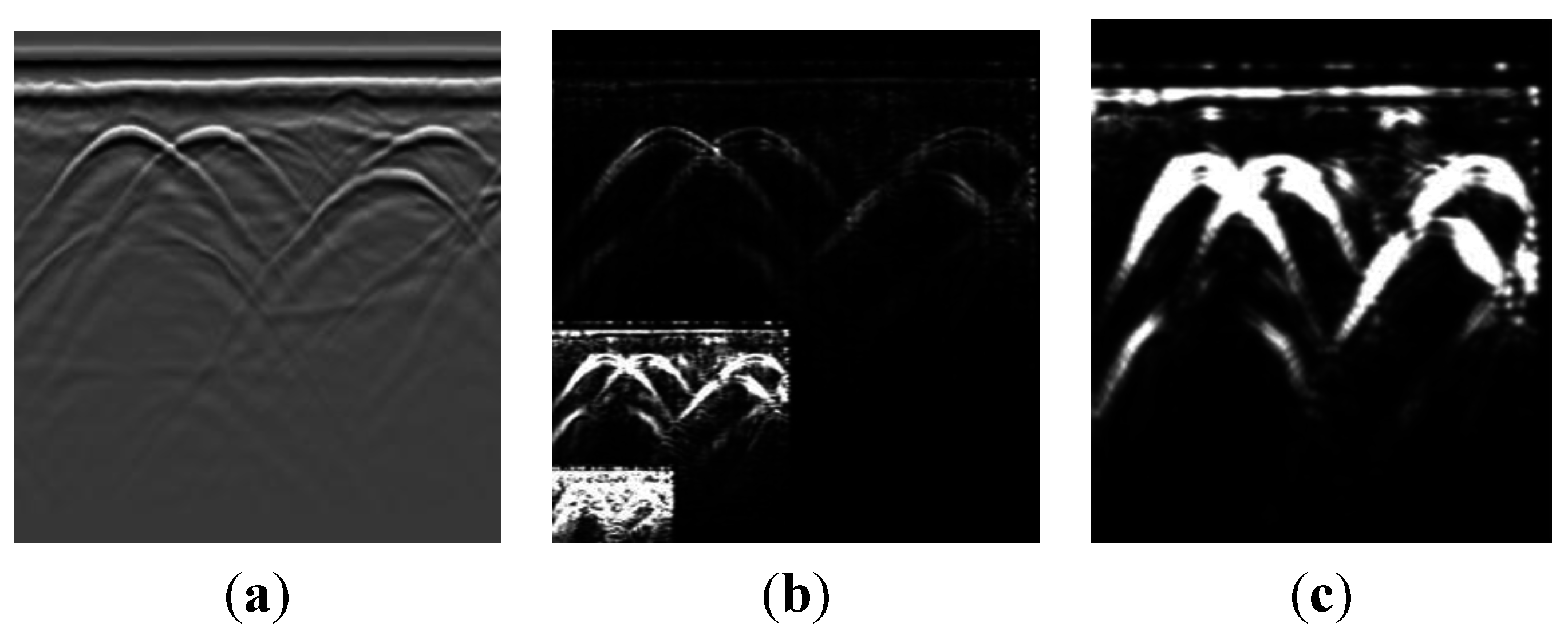
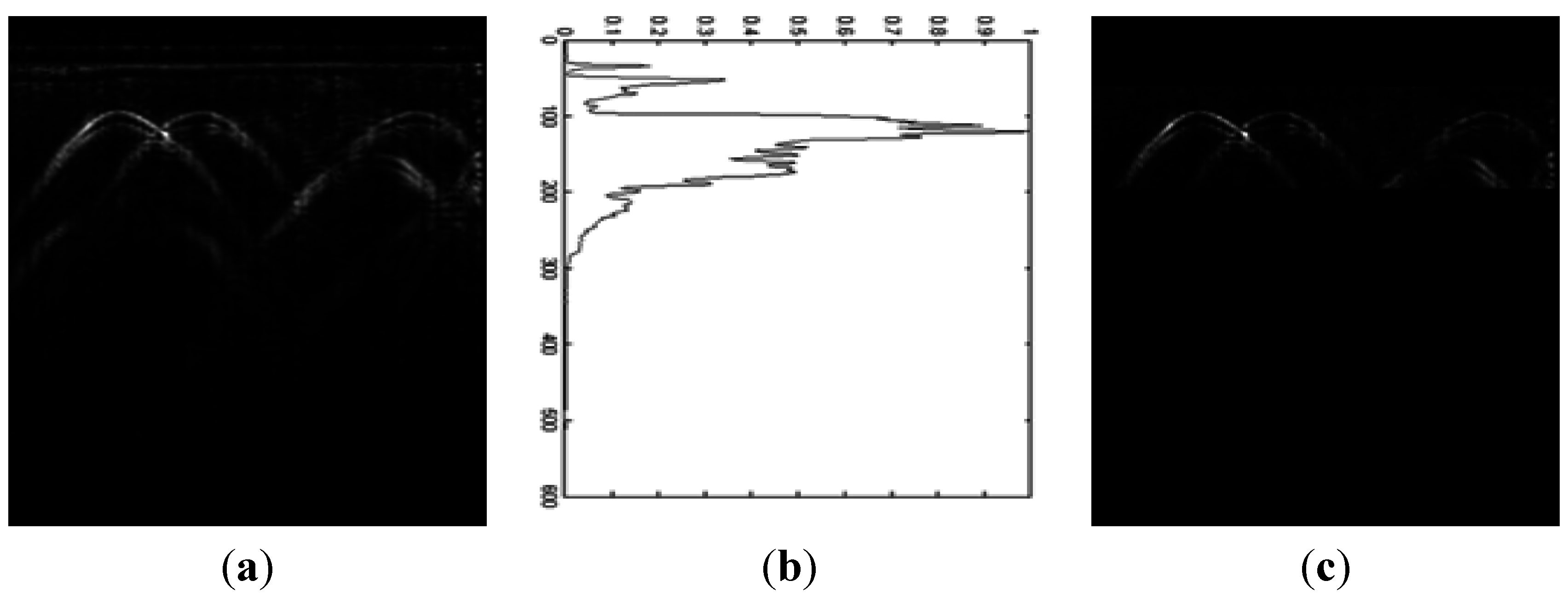
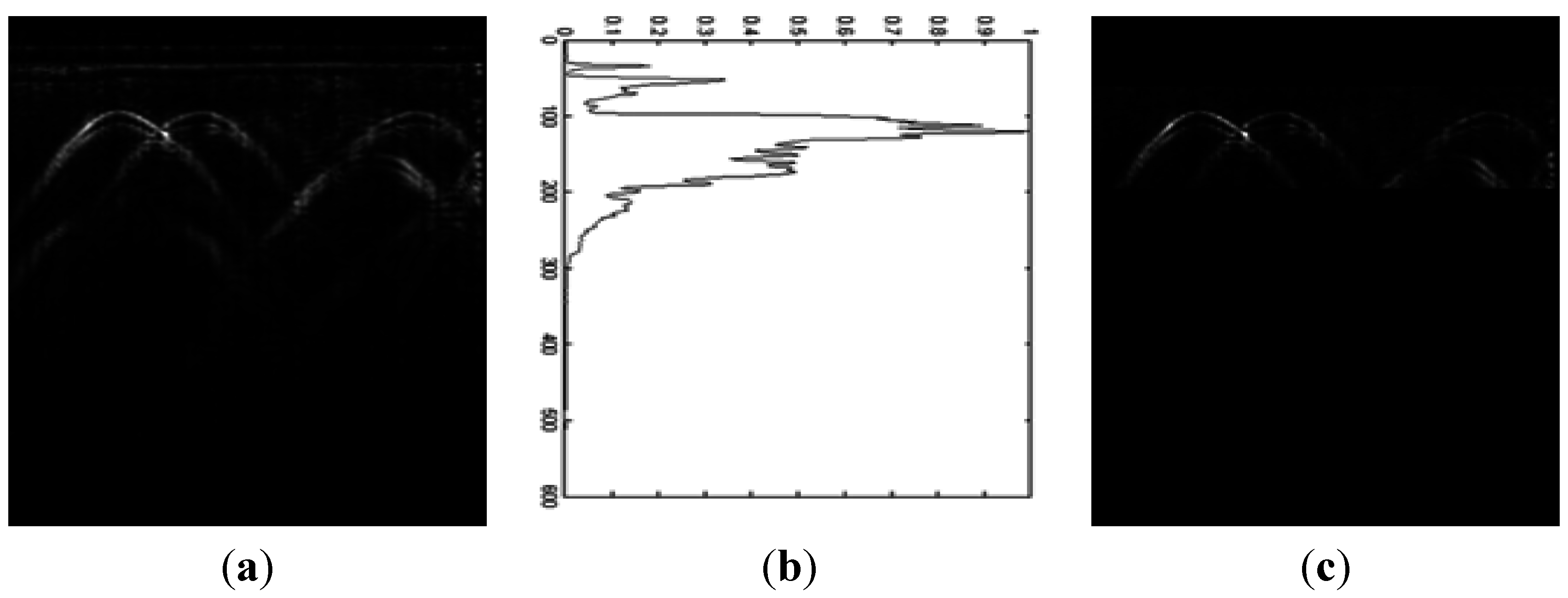
3.2. Extraction the Region of Interest
3.3. Hough Transform
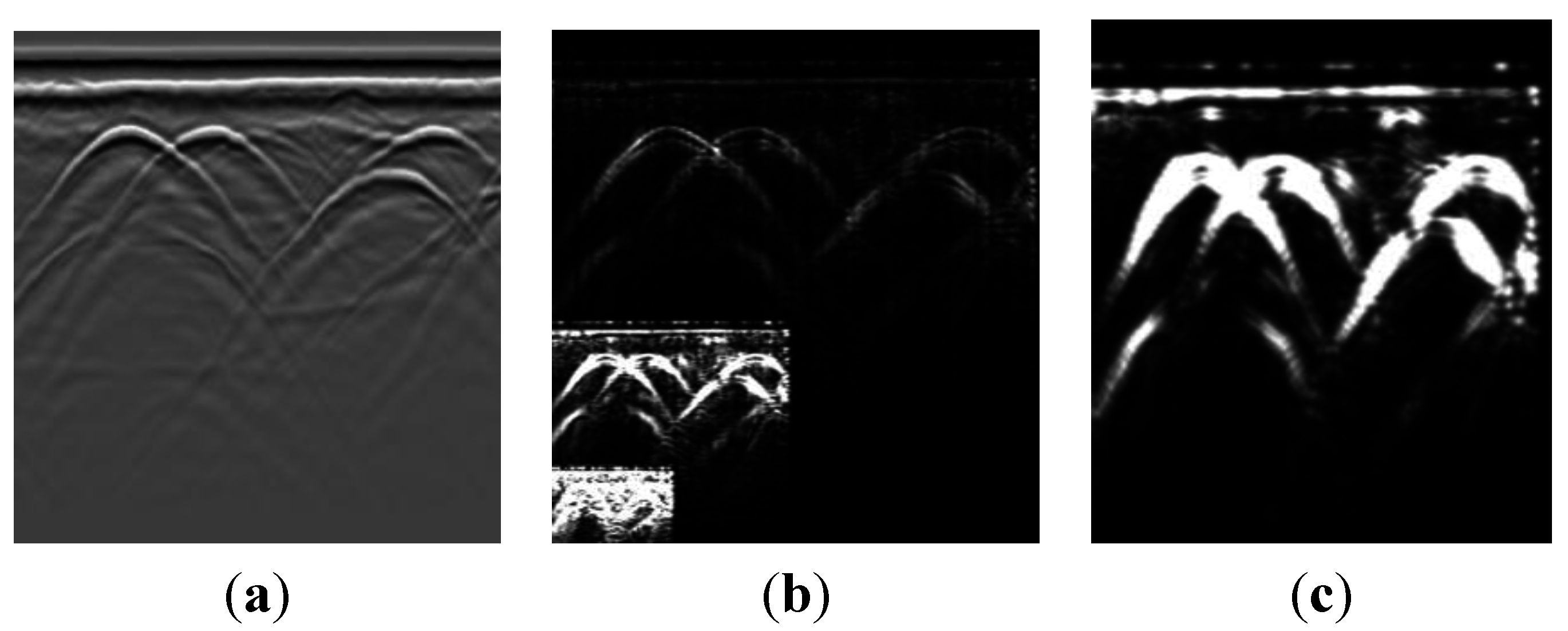
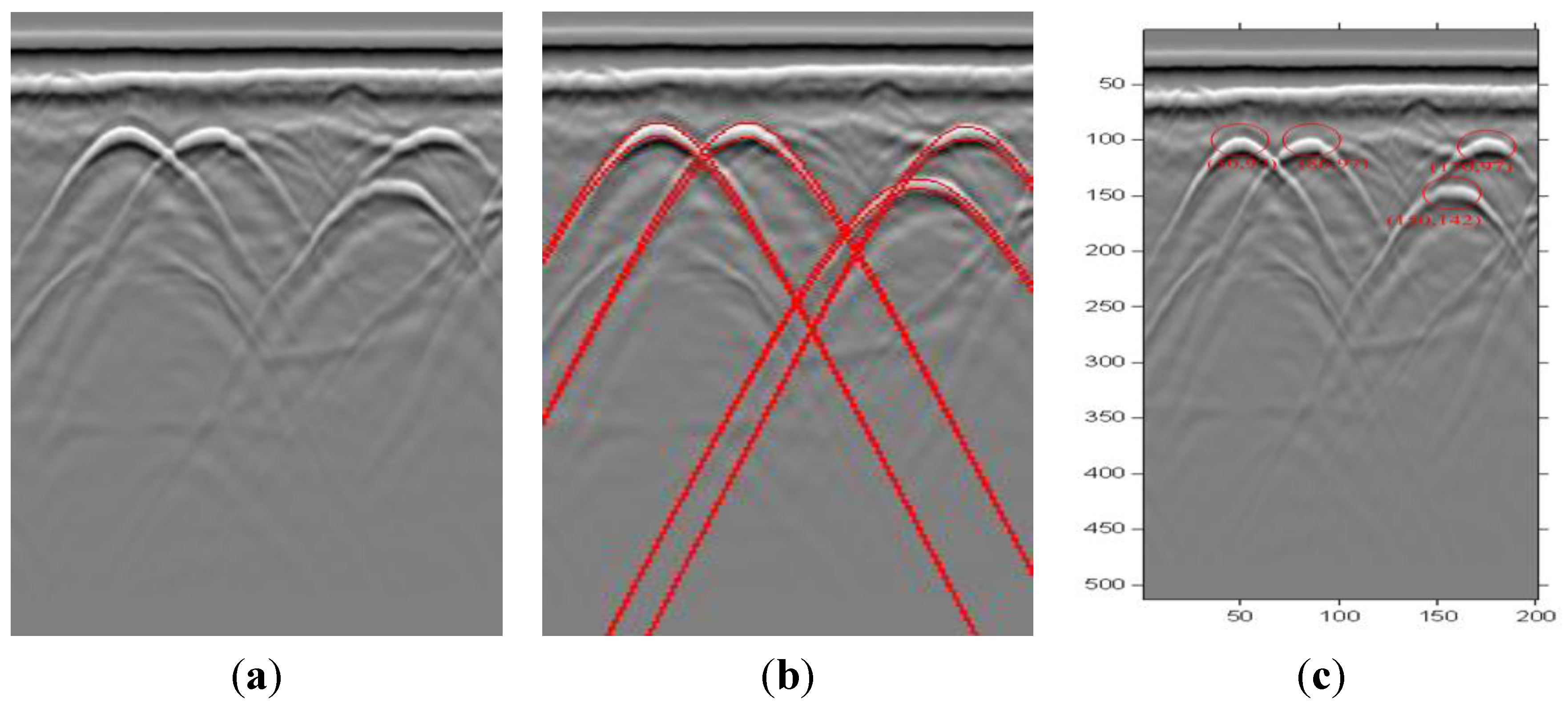
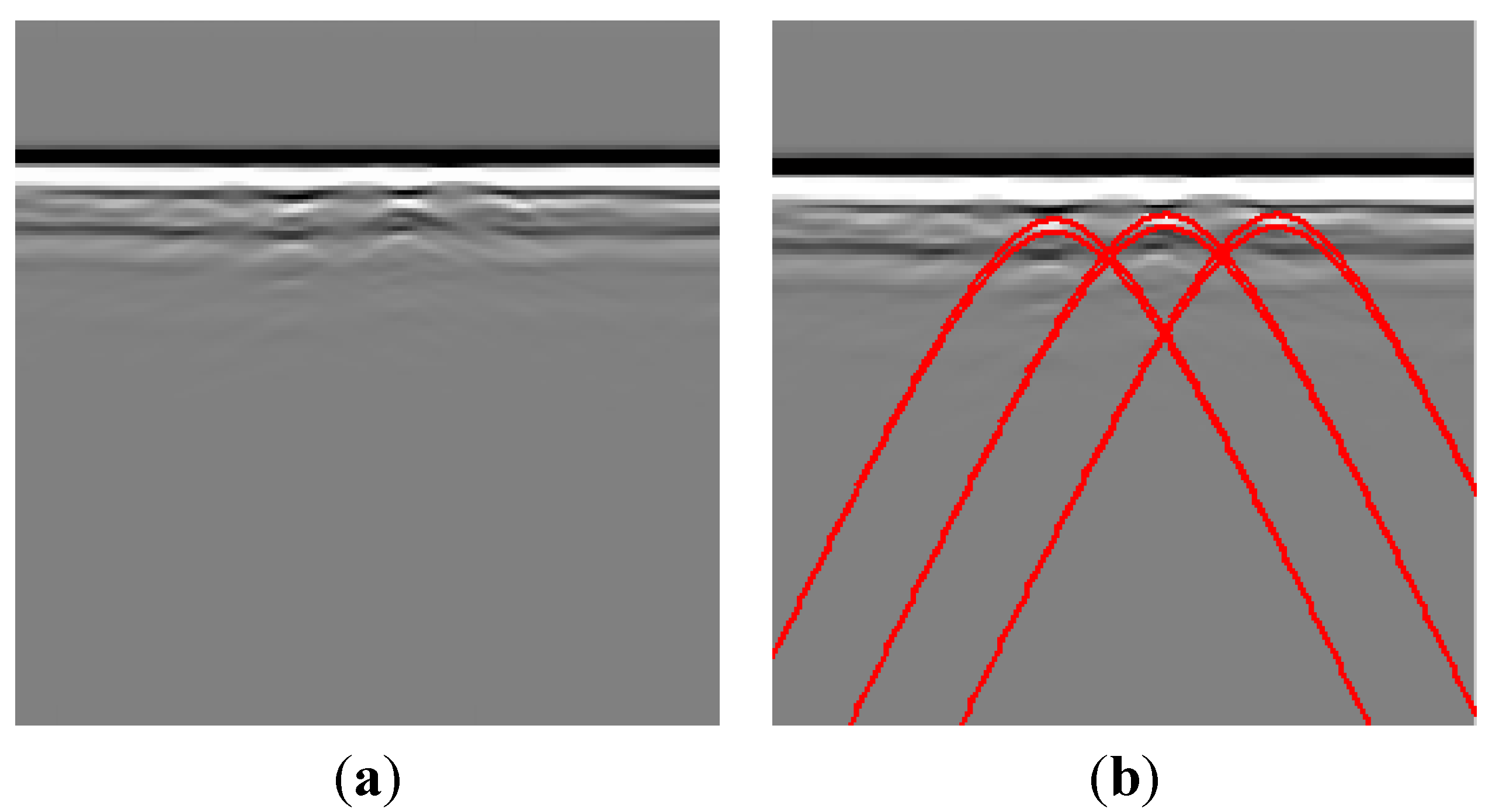
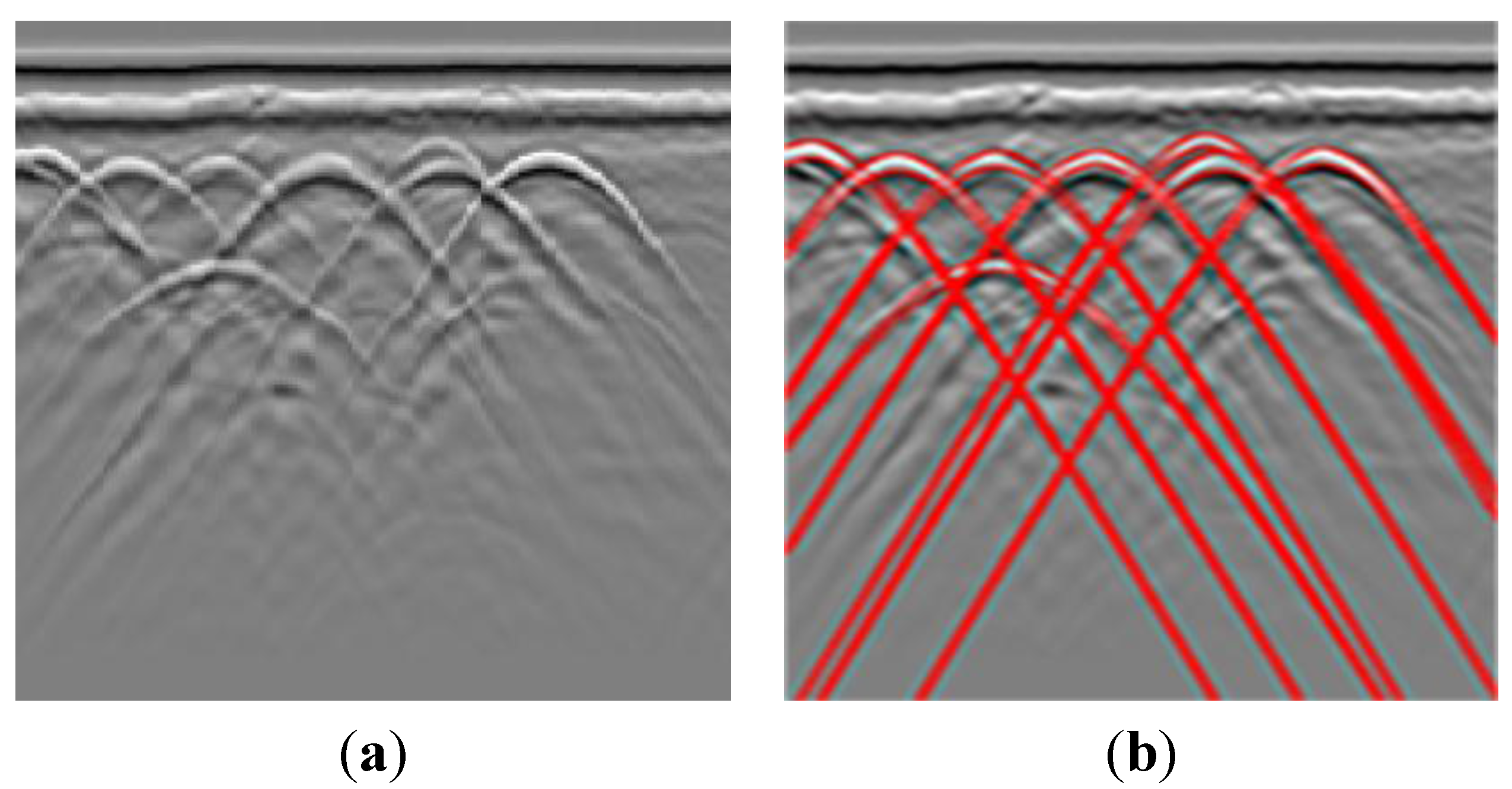
4. Results
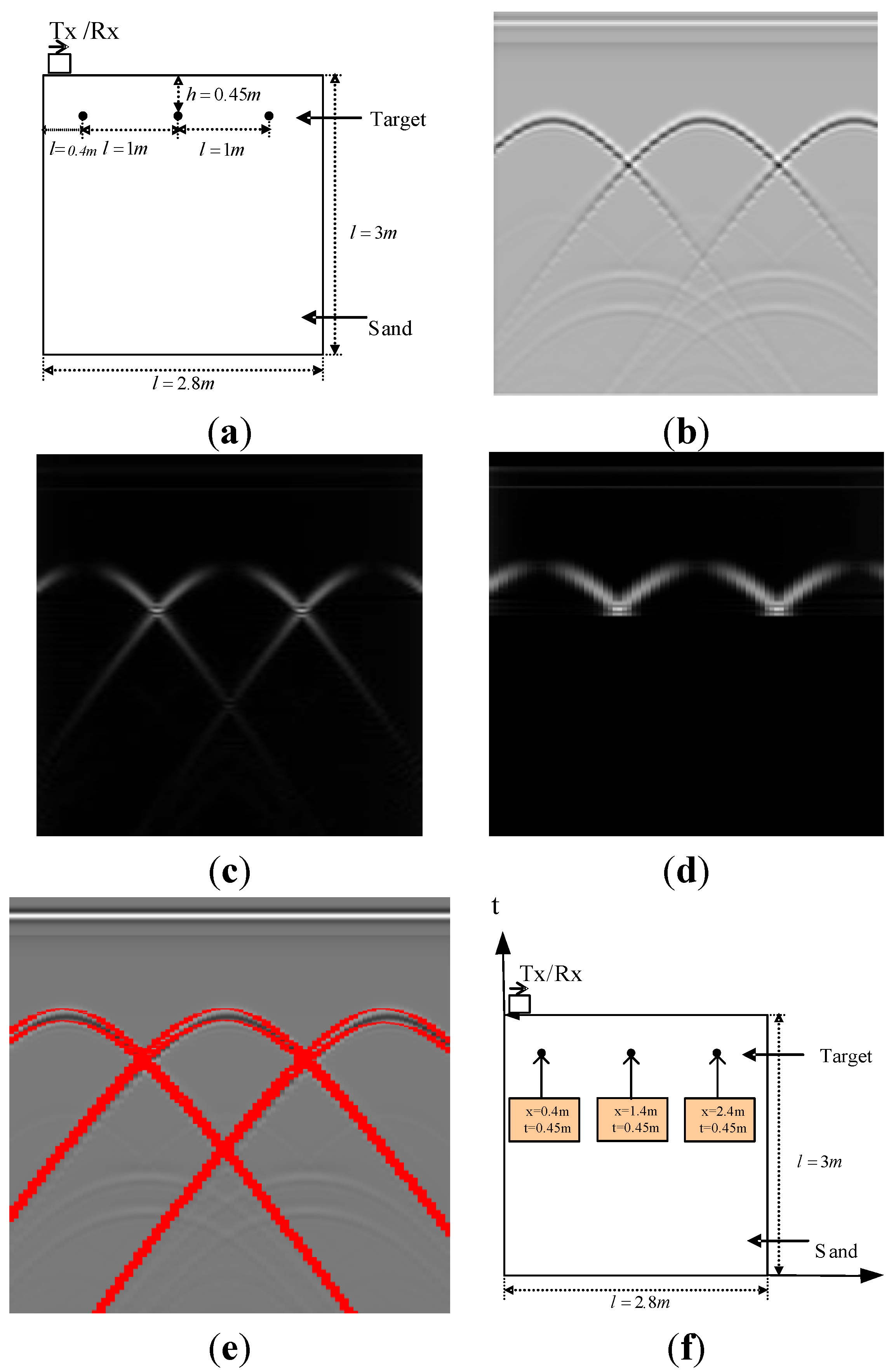
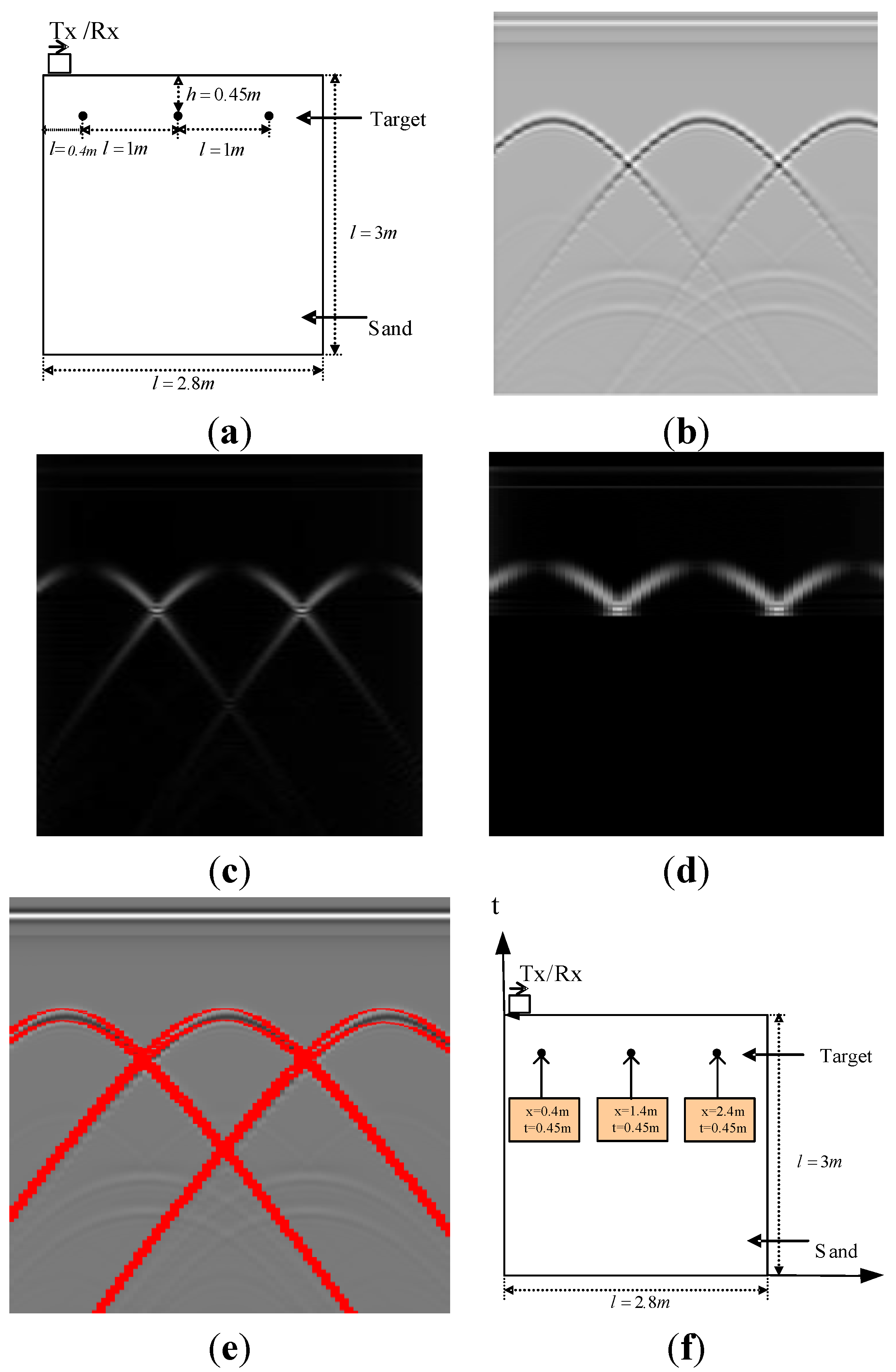
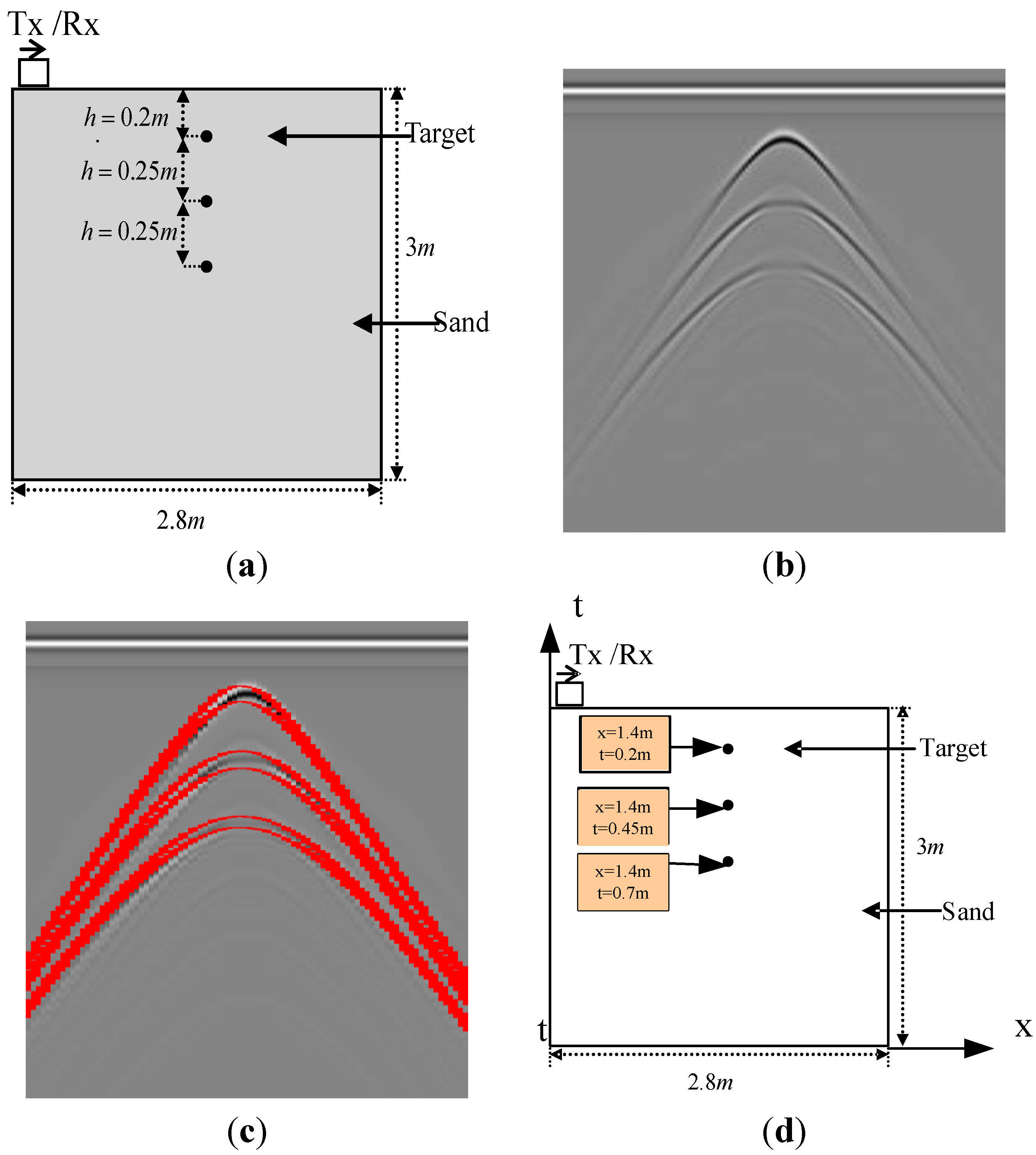
4.1. Simulation Results

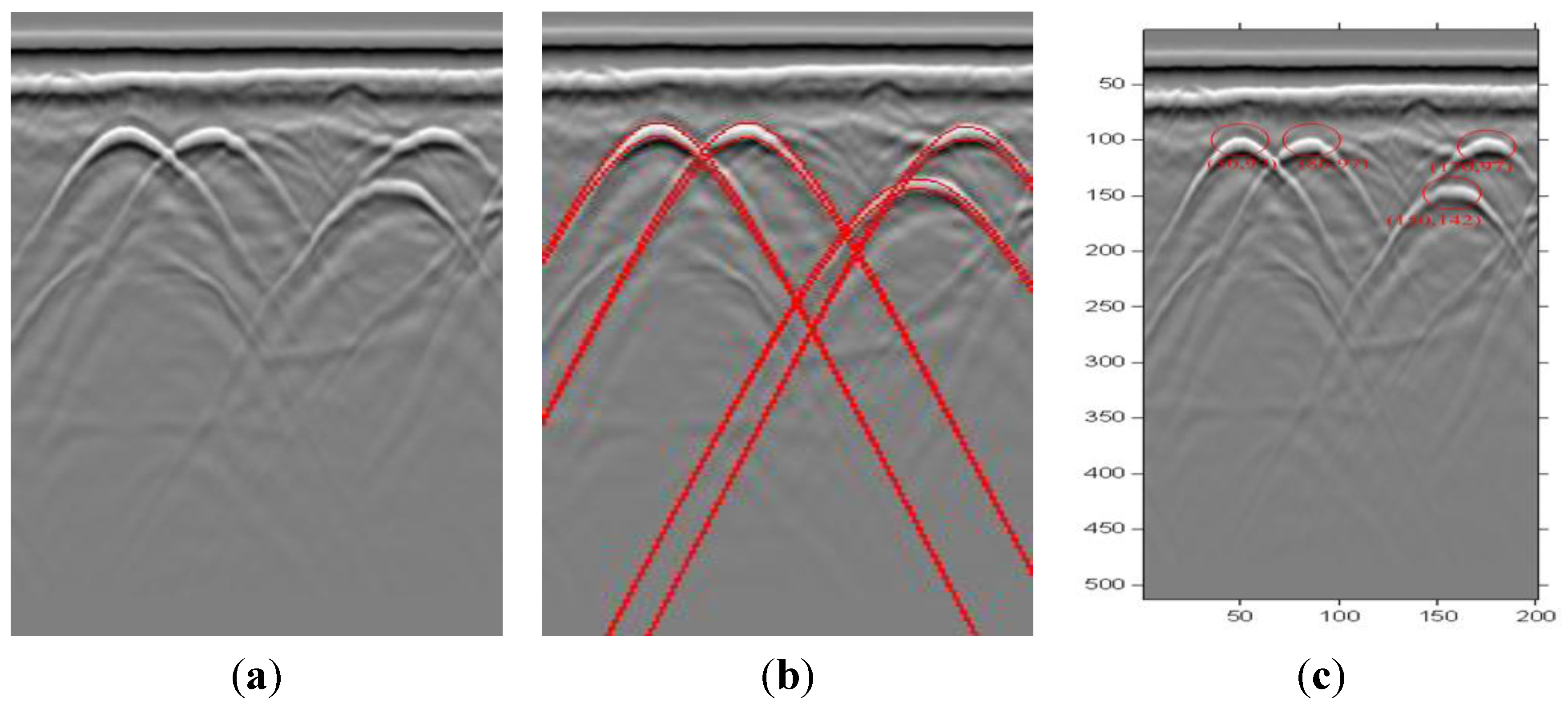
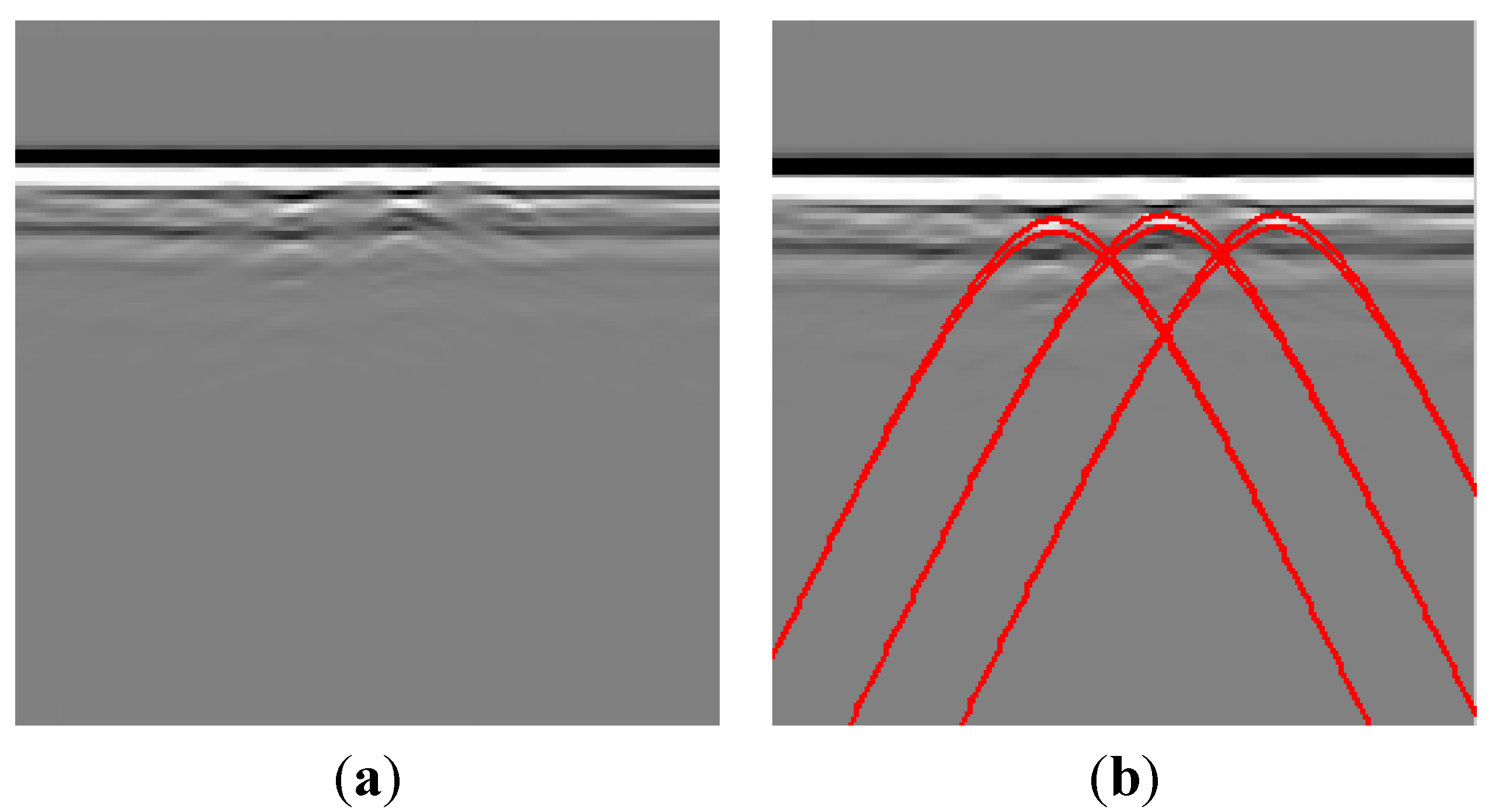
4.2. Experiment Results

- How many hyperbolas are recognized correctly (true positives) and how many non-hyperbolas/ non-targets are recognized as hyperbolas (false positives)?
- The distance error of all correctly recognized targets.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Recall (Hyperbolas) | Precision (Hyperbolas) | F-measure (Hyperbolas) | Distance Error(cm) |
|---|---|---|---|---|
| K-means+CEM | 0.62 | 0.62 | 0.62 | 34.8 |
| HADA | 0.75 | 0.75 | 0.75 | 22.8 |
| MMSA | 1 | 1 | 0 | 5.8 |
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Delbo, S.; Gamba, P.; Roccato, D. A fuzzy shell clustering approach to recognize hyperbolic signatures in subsurface radar images. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1447–1451. [Google Scholar] [CrossRef]
- Gamba, P.; Lossani, S. Neural detection of pipe signatures in ground penetrating radar images. IEEE Trans. Geosci. Remote Sens. 2000, 38, 790–797. [Google Scholar] [CrossRef]
- Kaneko, T. Radar image processing for locating underground linear objects. IEICE Trans. 1991, 74, 3451–3458. [Google Scholar]
- Shihab, S.; Al-Nuaimy, W.; Eriksen, A. Image processing and neural network techniques for automatic detection and interpretation of ground penetrating radar data. In Proceedings of the 6th International Multi-Conference on Circuits, Systems, Communications and Computers, Cancun, Mexico, 12–16 May 2002.
- Capineri, L.; Grande, P.; Temple, J.A.G. Advanced image-processing technique for real-time interpretation of ground-penetrating radar images. Int. J. Imaging Syst. Technol. 1998, 9, 51–59. [Google Scholar] [CrossRef]
- Unser, M.; Sage, D.; van de Ville, D. Multiresolution monogenic signal analysis using the Riesz-Laplace wavelet transform. IEEE Trans. Image Process. 2009, 18, 2402–2418. [Google Scholar] [CrossRef] [PubMed]
- Dong, G.; Wang, N.; Kuang, G. Sparse representation of monogenic signal: With application to target recognition in SAR images. IEEE Signal Process. Lett. 2014, 21, 952–956. [Google Scholar]
- Dong, G.; Kuang, G. Target recognition in SAR images via classification on Riemannian manifolds. IEEE Geosci. Remote Sens. Lett. 2015, 12, 199–203. [Google Scholar] [CrossRef]
- Felsberg, M.; Sommer, G. The monogenic scale-space: A unifying approach to phase-based image processing in scale-space. J. Math. Imaging Vis. 2004, 21, 5–26. [Google Scholar] [CrossRef]
- Chen, D.L. ROI Extraction Research of Ground Penetrating Radar Data. Bachelor Thesis, National University of Defense Technology, Changsha, China, 2003. [Google Scholar]
- Huang, K.; Fu, K.; Sheen, T.; Cheng, S. Image processing of seismograms: Hough transformation for the detection of seismic patterns; thinning processing in the seismogram. Pattern Recog. 1985, 18, 429–440. [Google Scholar] [CrossRef]
- Chen, H.; Cohn, A.G. Probabilistic robust hyperbola mixture model for interpreting ground penetrating radar data. In Proceedings of the 2010 International Joint Conference on Neural Networks, Barcelona, Spain, 18–23 July 2010.
- Simi, A.; Bracciali, S.; Manacorda, G. Hough transform based automatic pipe detection for array GPR: Algorithm development and on-site tests. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1–6.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiao, L.; Qin, Y.; Ren, X.; Wang, Q. Identification of Buried Objects in GPR Using Amplitude Modulated Signals Extracted from Multiresolution Monogenic Signal Analysis. Sensors 2015, 15, 30340-30350. https://doi.org/10.3390/s151229801
Qiao L, Qin Y, Ren X, Wang Q. Identification of Buried Objects in GPR Using Amplitude Modulated Signals Extracted from Multiresolution Monogenic Signal Analysis. Sensors. 2015; 15(12):30340-30350. https://doi.org/10.3390/s151229801
Chicago/Turabian StyleQiao, Lihong, Yao Qin, Xiaozhen Ren, and Qifu Wang. 2015. "Identification of Buried Objects in GPR Using Amplitude Modulated Signals Extracted from Multiresolution Monogenic Signal Analysis" Sensors 15, no. 12: 30340-30350. https://doi.org/10.3390/s151229801
APA StyleQiao, L., Qin, Y., Ren, X., & Wang, Q. (2015). Identification of Buried Objects in GPR Using Amplitude Modulated Signals Extracted from Multiresolution Monogenic Signal Analysis. Sensors, 15(12), 30340-30350. https://doi.org/10.3390/s151229801