
Application of Novel Lateral Tire Force Sensors to Vehicle Parameter Estimation of Electric Vehicles

Abstract
:1. Introduction
2. Lateral Tire Force Sensors

3. Vehicle and Tire Models
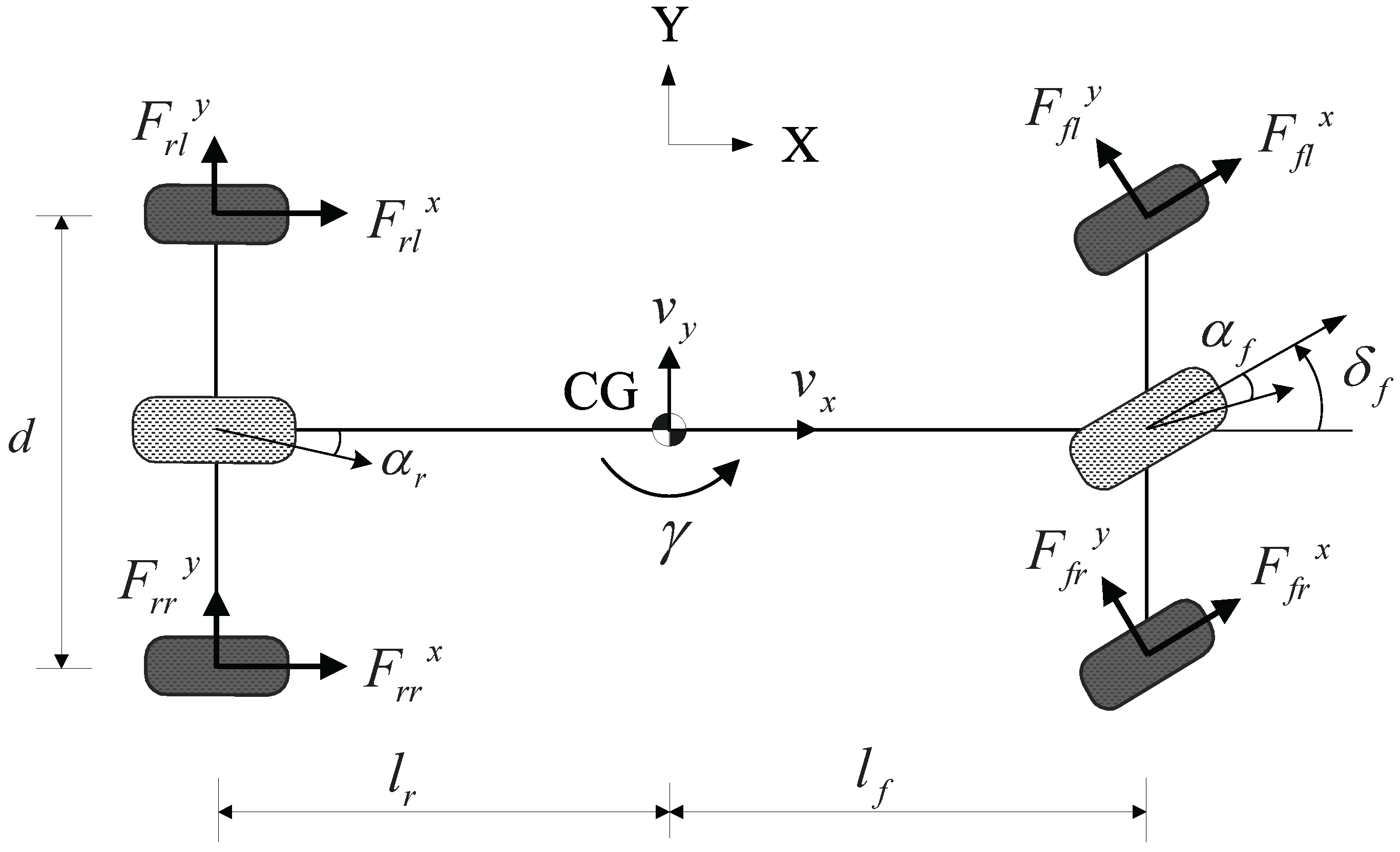
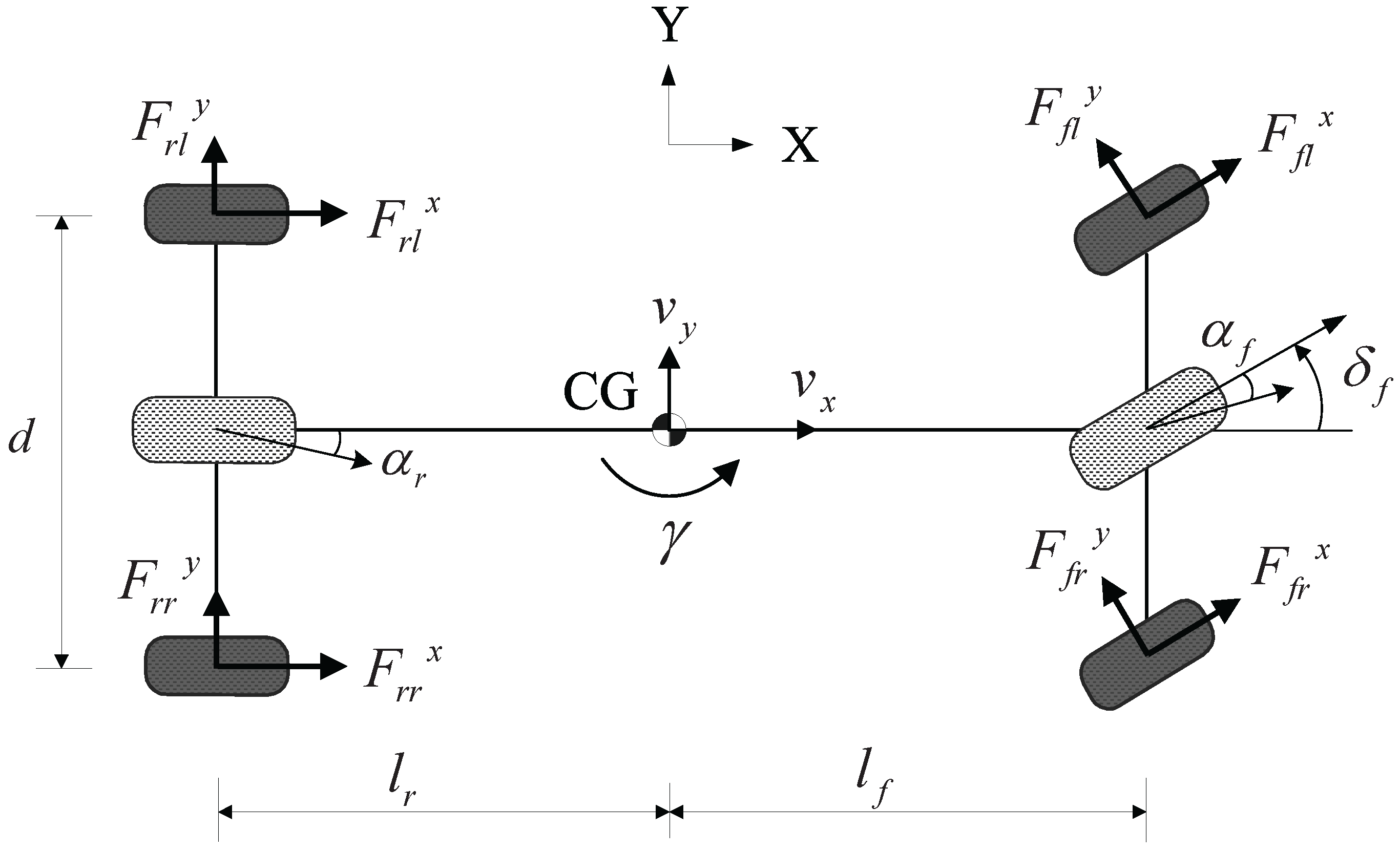
3.1. Vehicle Modeling
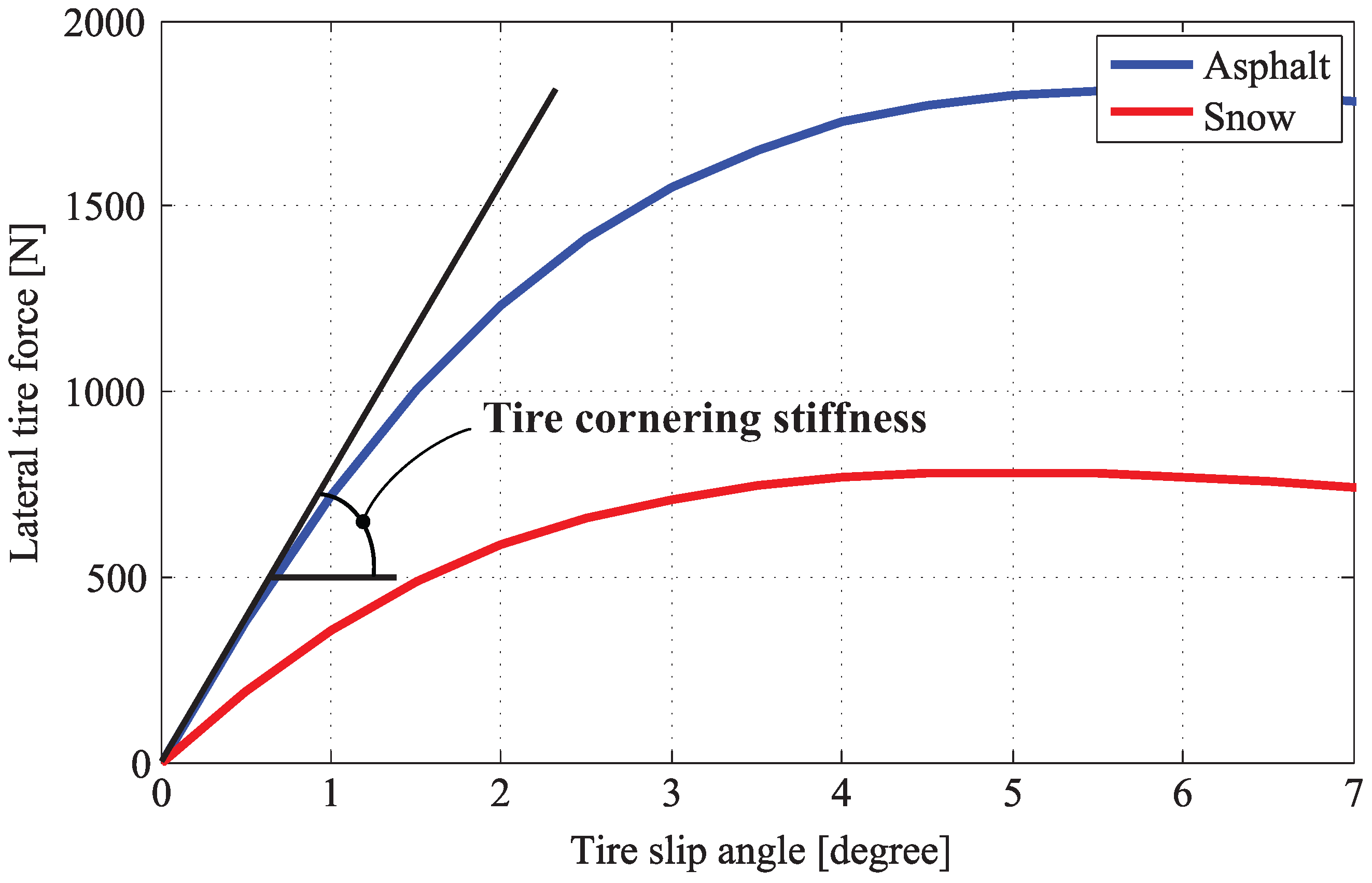
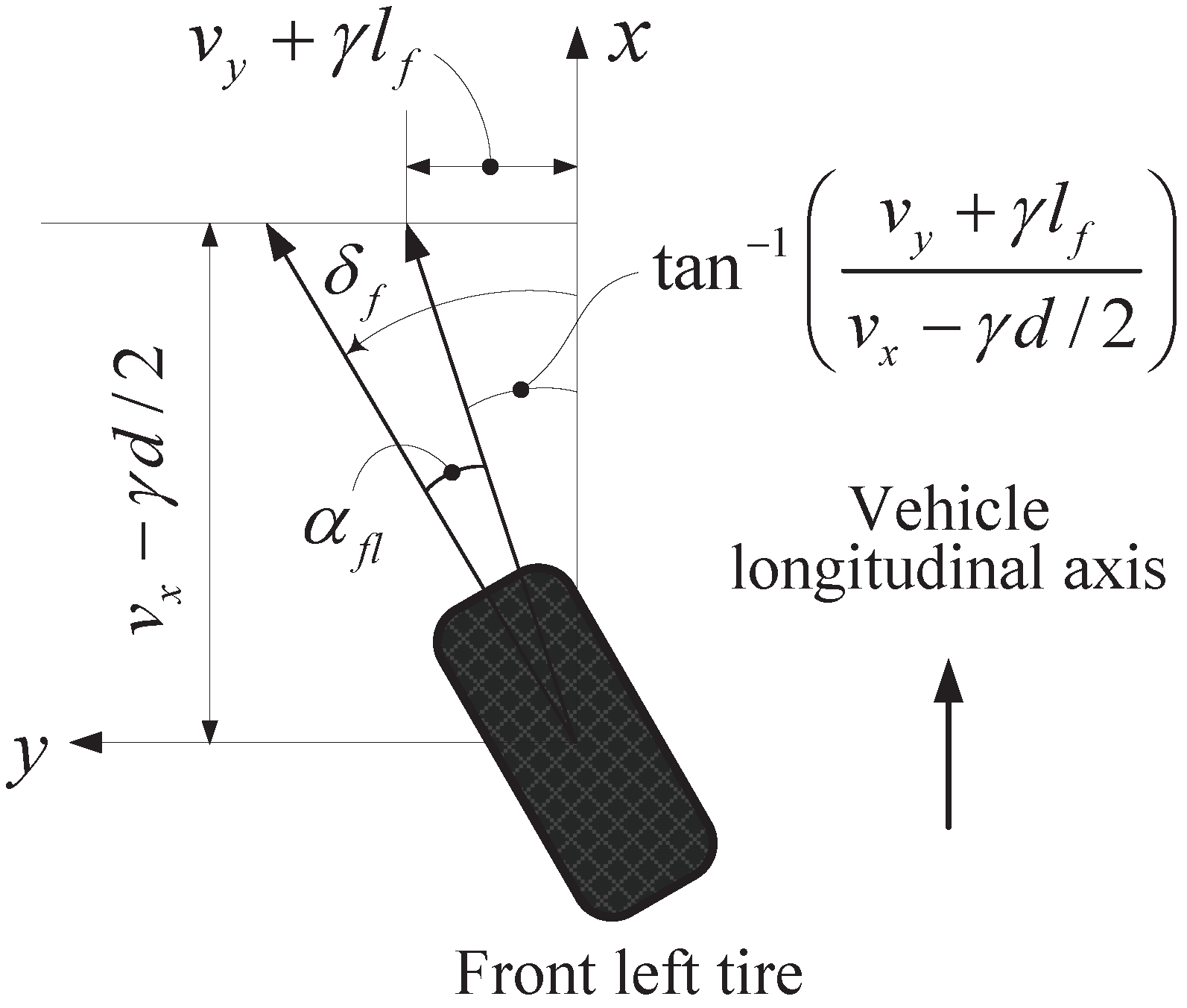
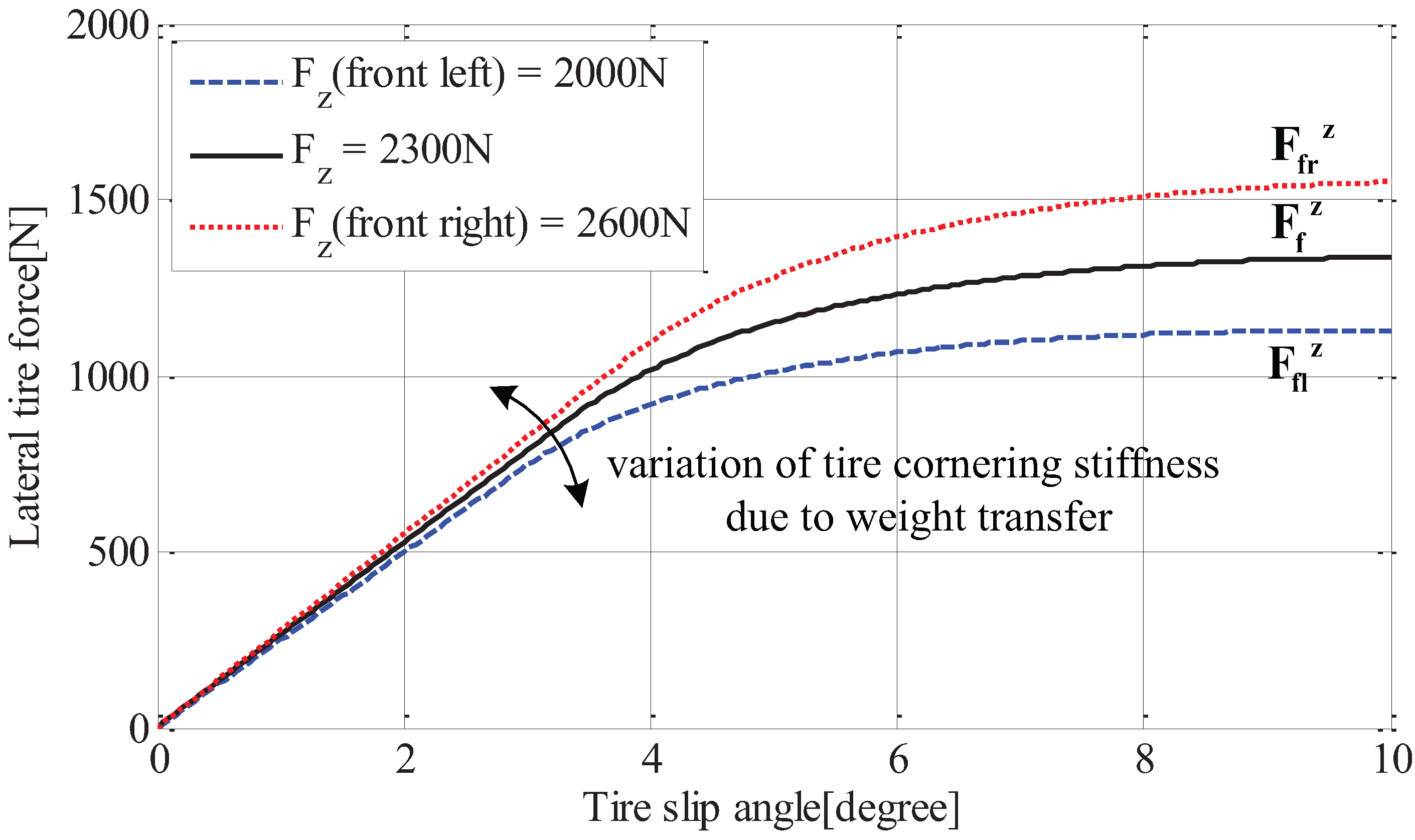
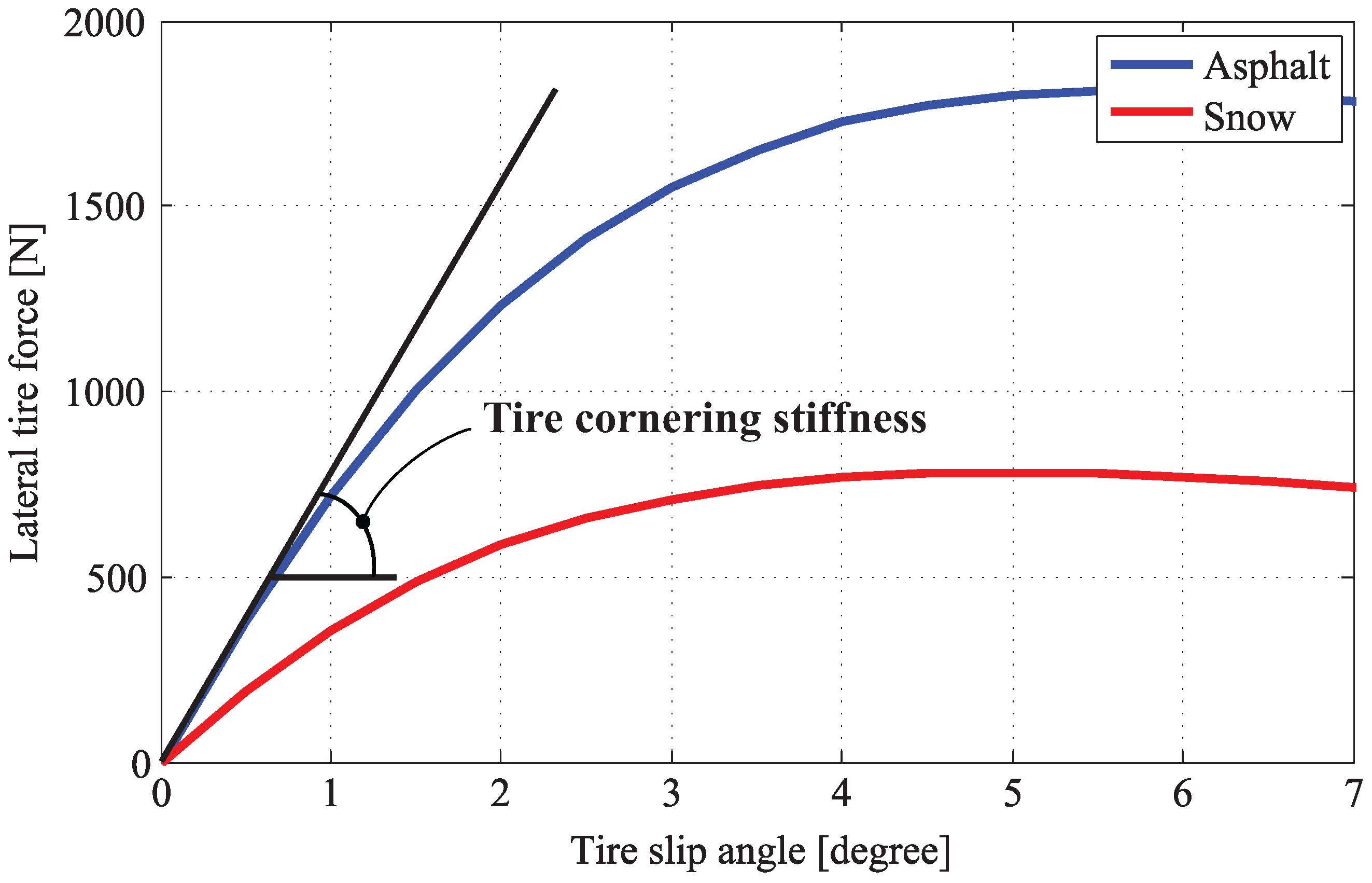
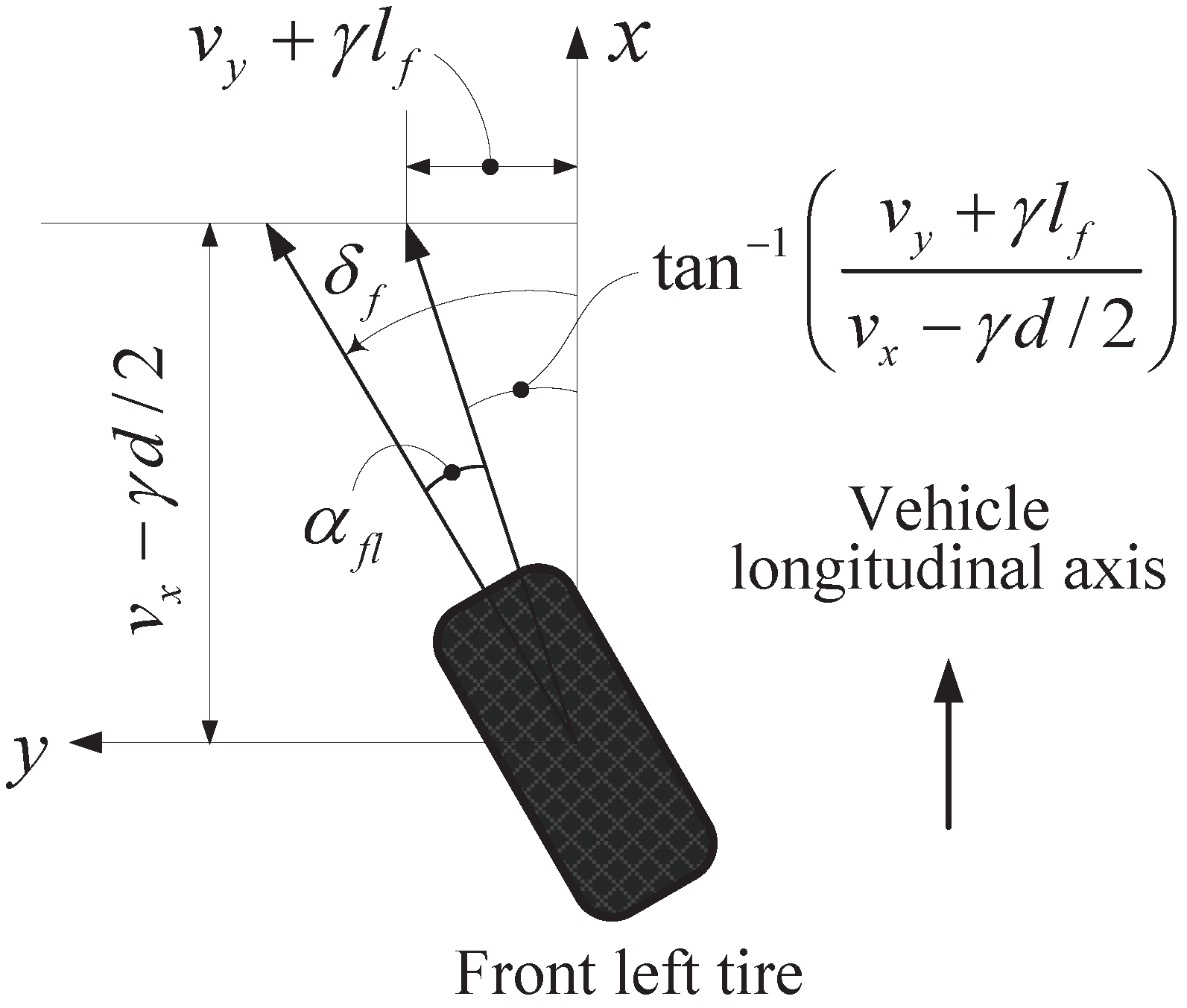
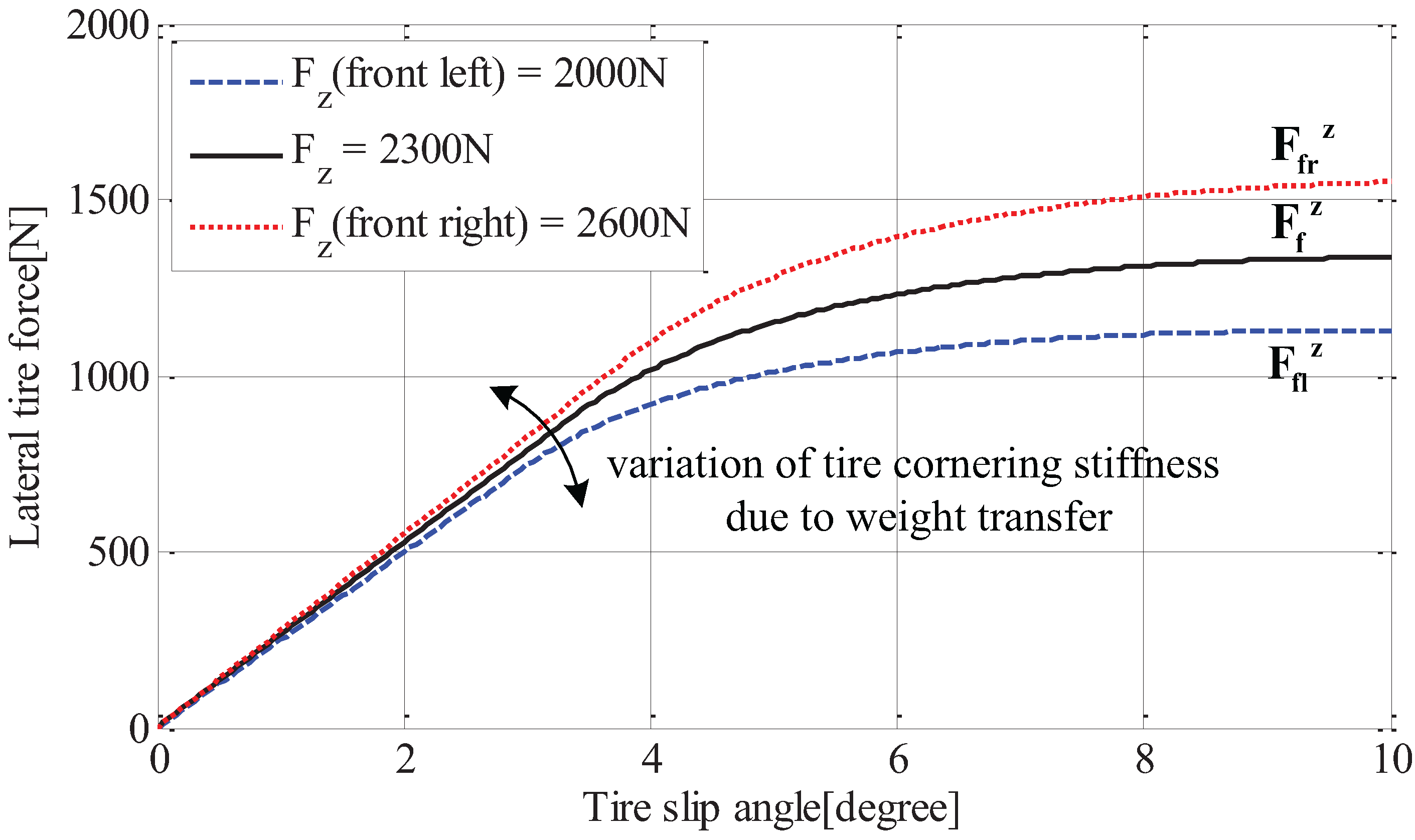
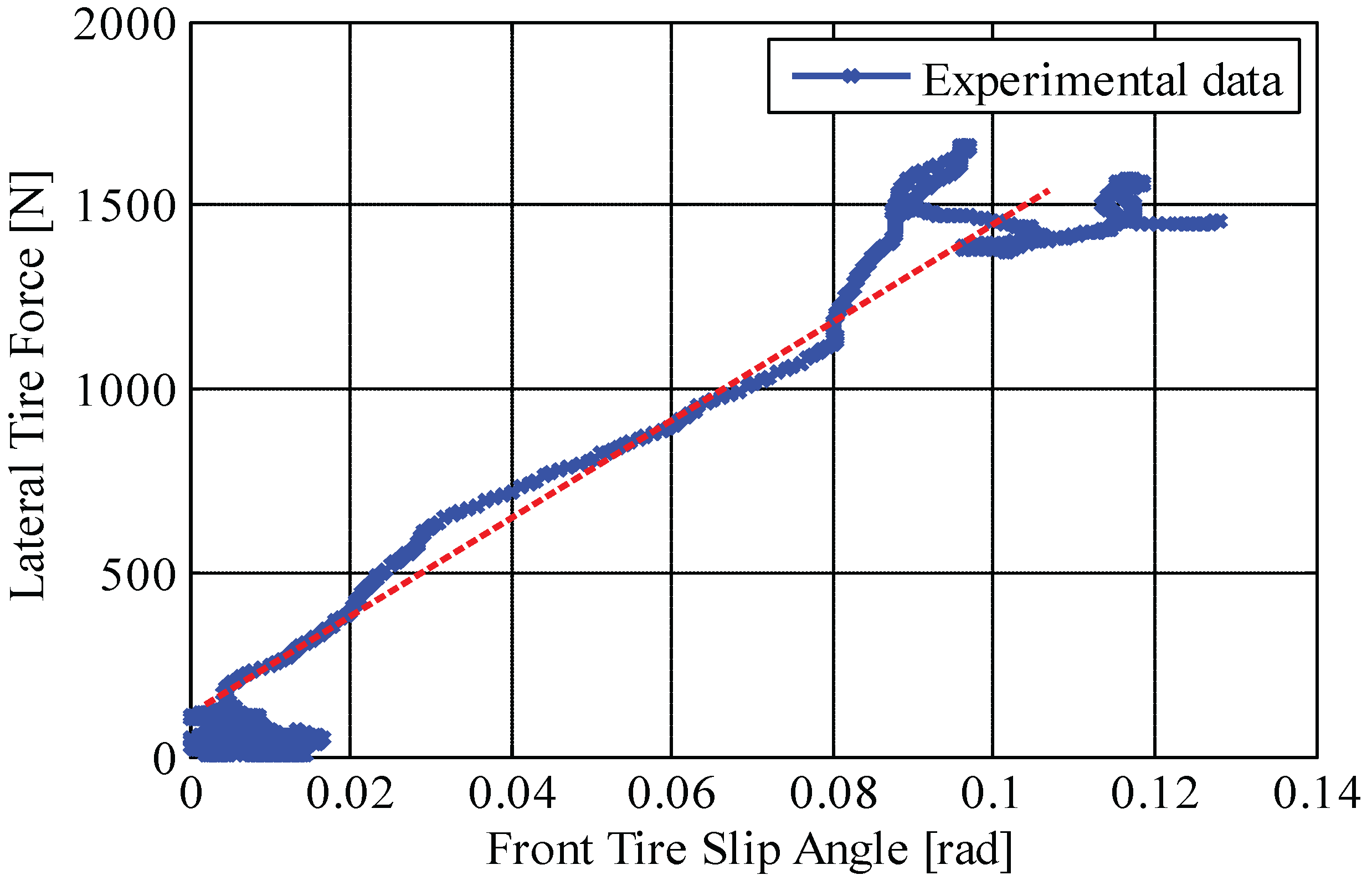
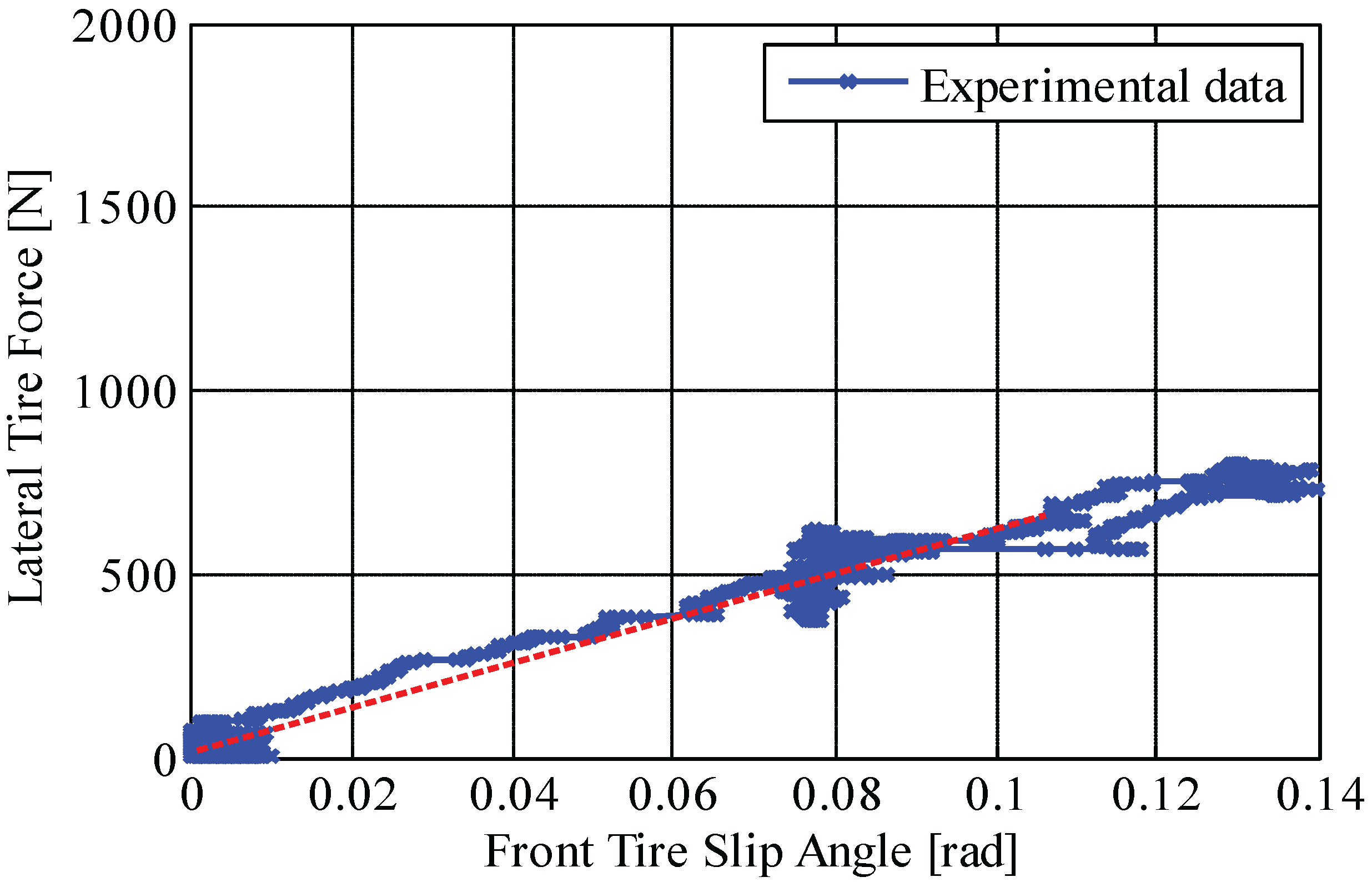
3.2. Lateral Tire Force Model
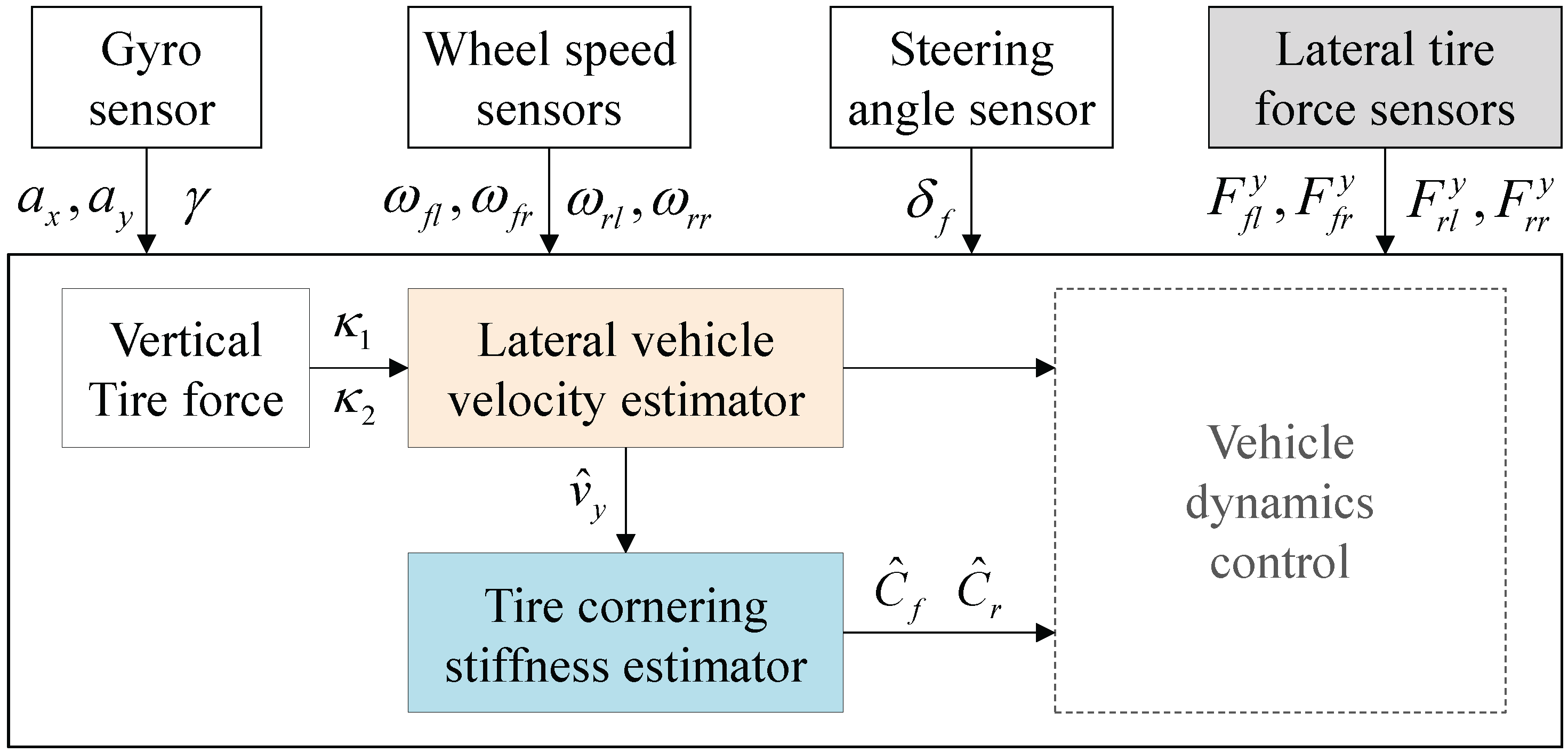
4. Vehicle State and Parameter Estimation
4.1. Estimation of Lateral Vehicle Velocity Using Tire Force Measurements
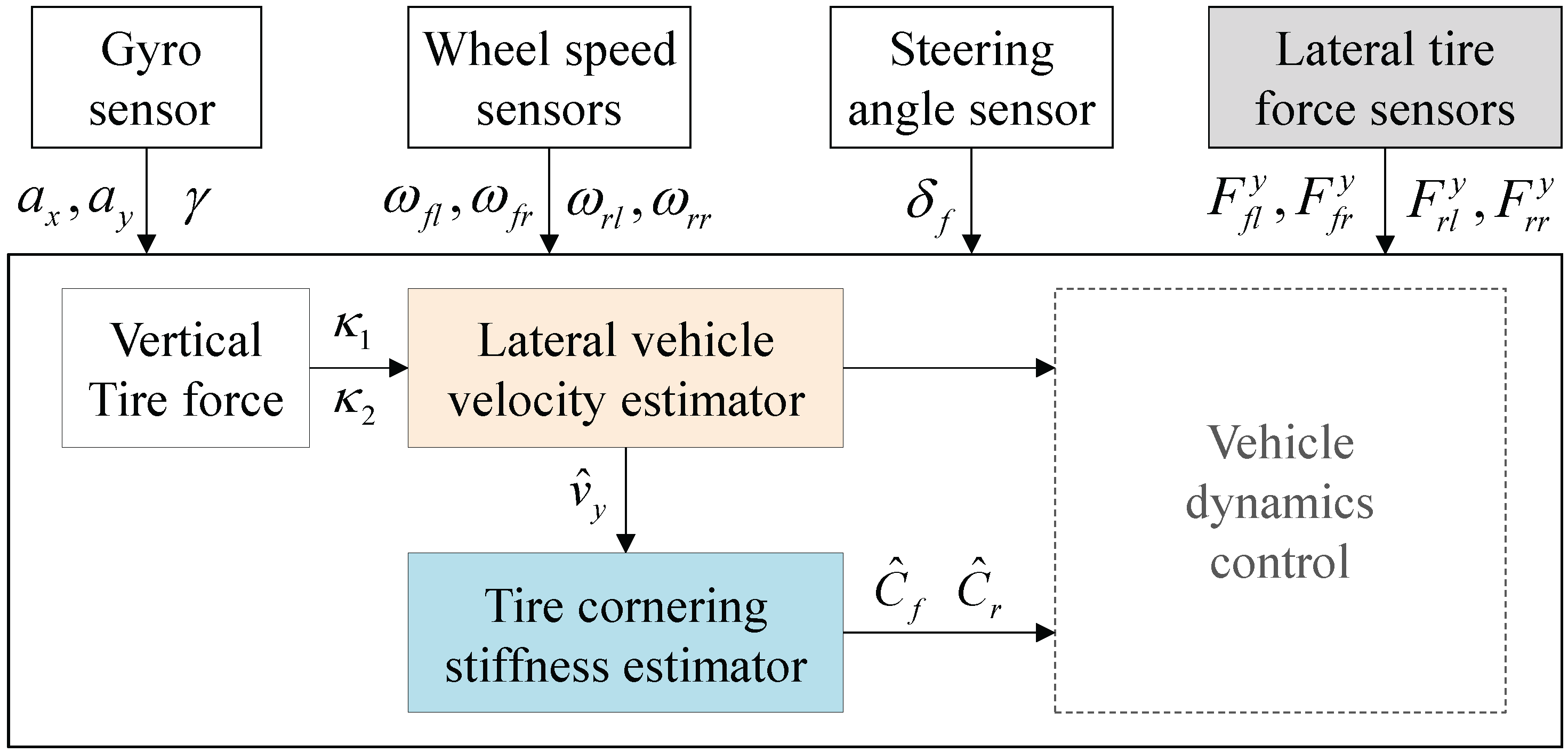
4.2. Estimation of Tire Cornering Stiffness
5. Experimental Verification

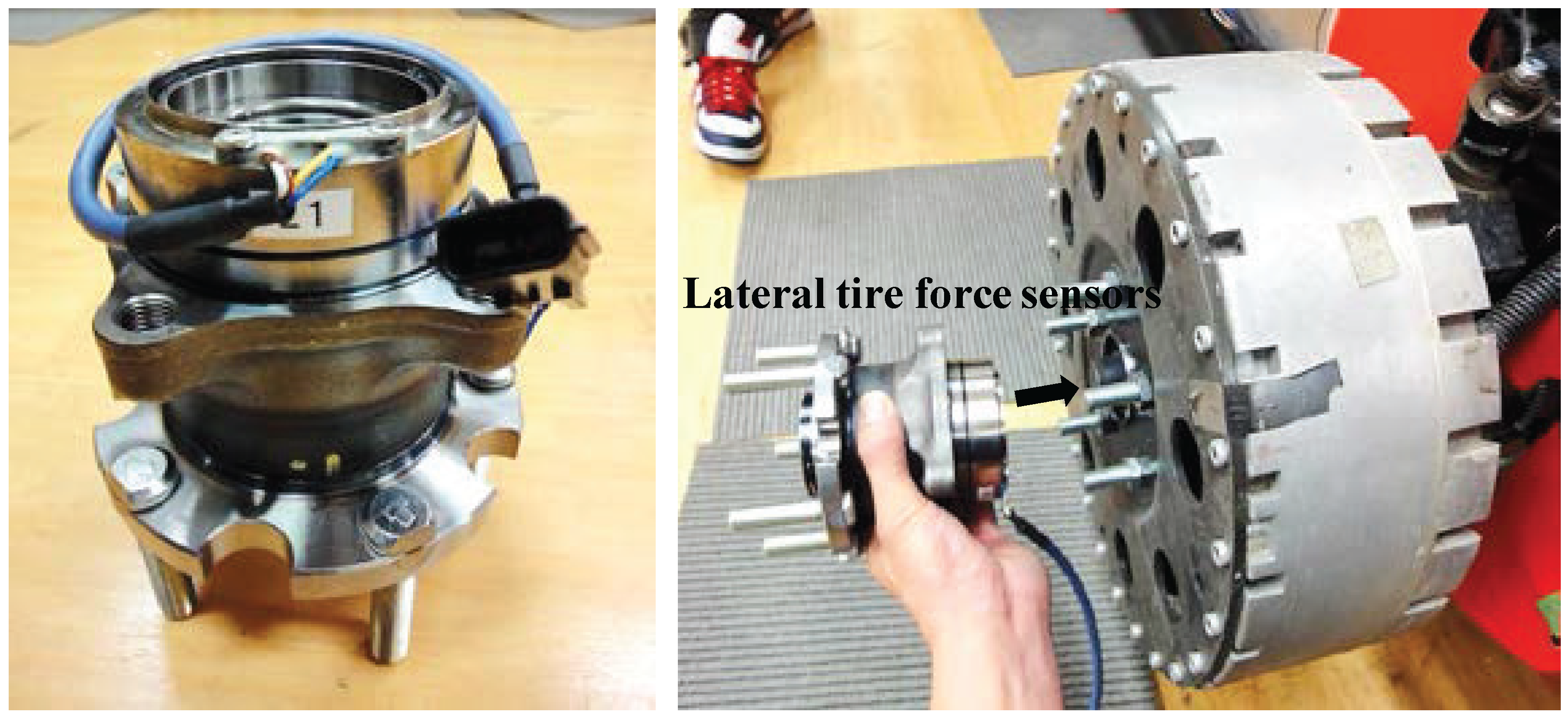
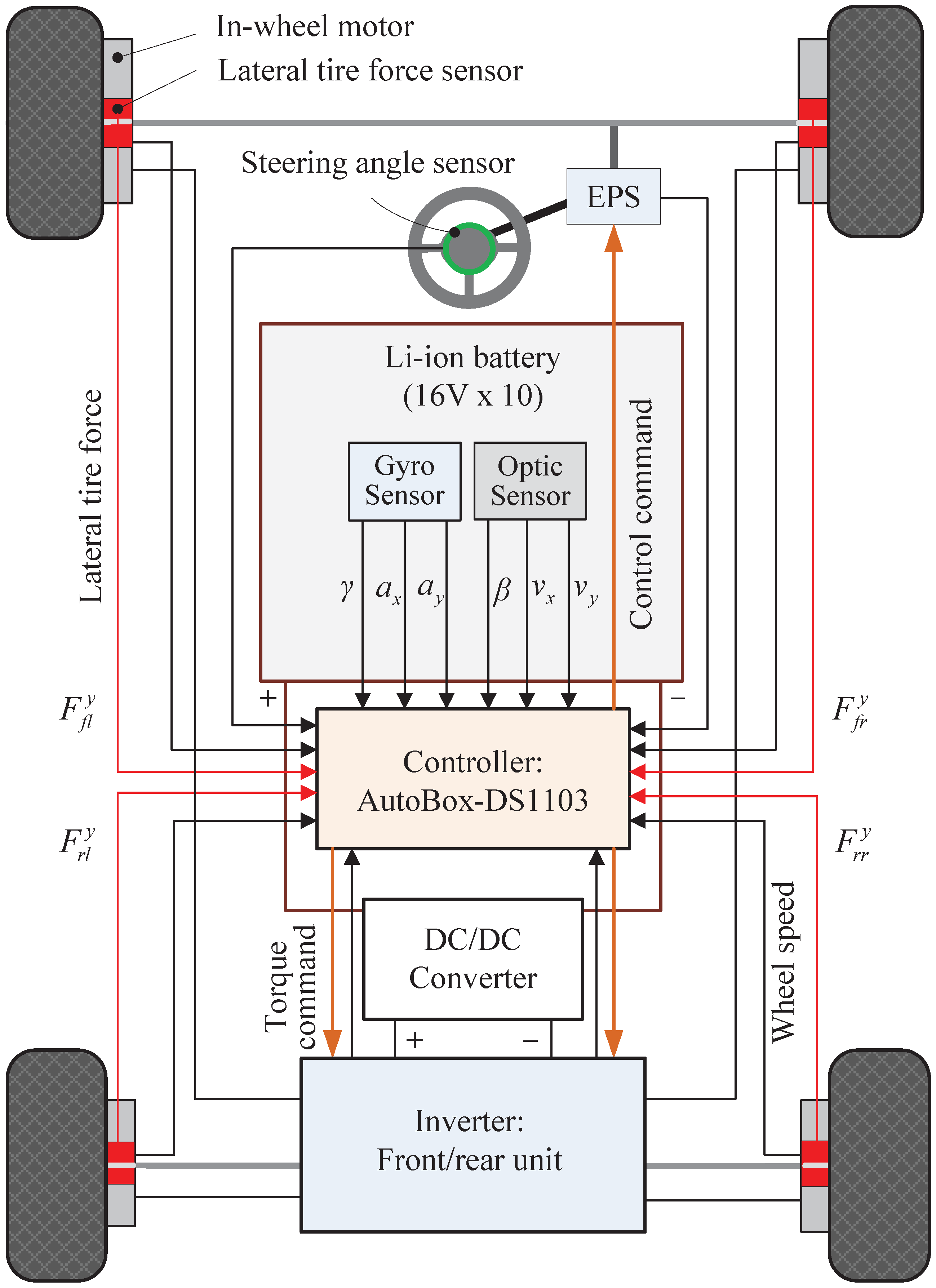
5.1. Experimental Setup
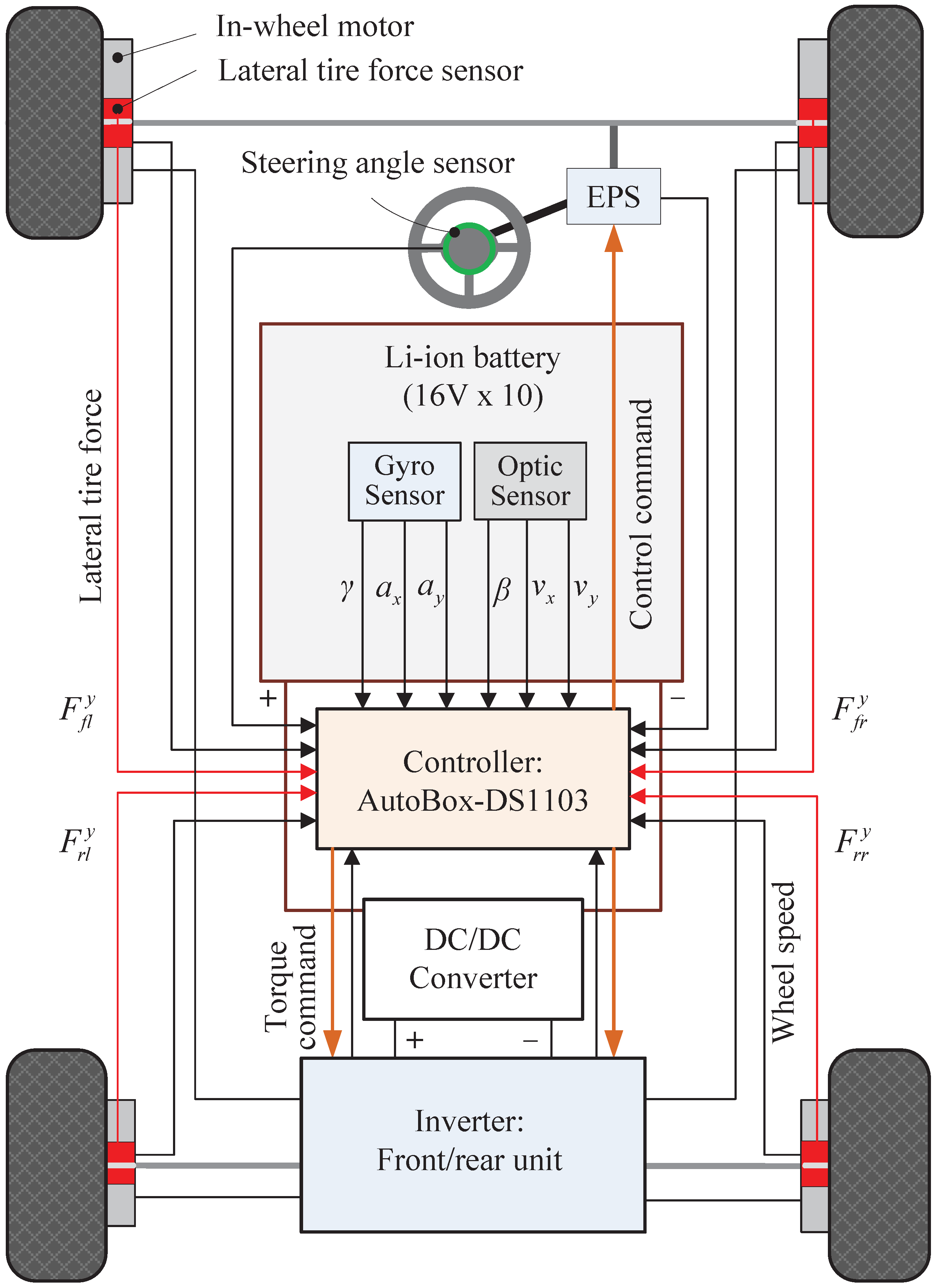
- In-wheel motors are attached in each wheel, and these are independently controlled by specially-designed motor control units, including inverters and digital signal processors.
- Novel sensors for sensing lateral tire forces are used for practical applications to vehicle dynamics control systems.
- Other sensors, which are now available in commercial ground vehicles, are also attached to the experimental vehicle, e.g., a steering angle sensor, a gyro sensor and wheel speed sensors.
- A non-contact optical sensor, Correvit (Corrsys-Datron), is used for accurate measurements of sideslip angle, lateral vehicle velocity and longitudinal vehicle velocity. That is only used as a reference for validating the proposed estimation algorithms.
- The dSPACE AutoBox (DS1103), which consists of a power PC 750GX controller board running at 933 MHz, 16-channel A/D converter and 8-channel D/A converter, was used for both real-time data acquisition and implementation of the estimation algorithms.
- The specifications for the experimental electric vehicle are listed in Table 1.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Total mass (m) | 875 kg |
| Distance between CG and front axle () | 1.013 m |
| Distance between CG and rear axle () | 0.702 m |
| Track width (d) | 1.3 m |
| Height of CG () | 0.51 m |
| Yaw moment of inertia () | 617 kg· m |
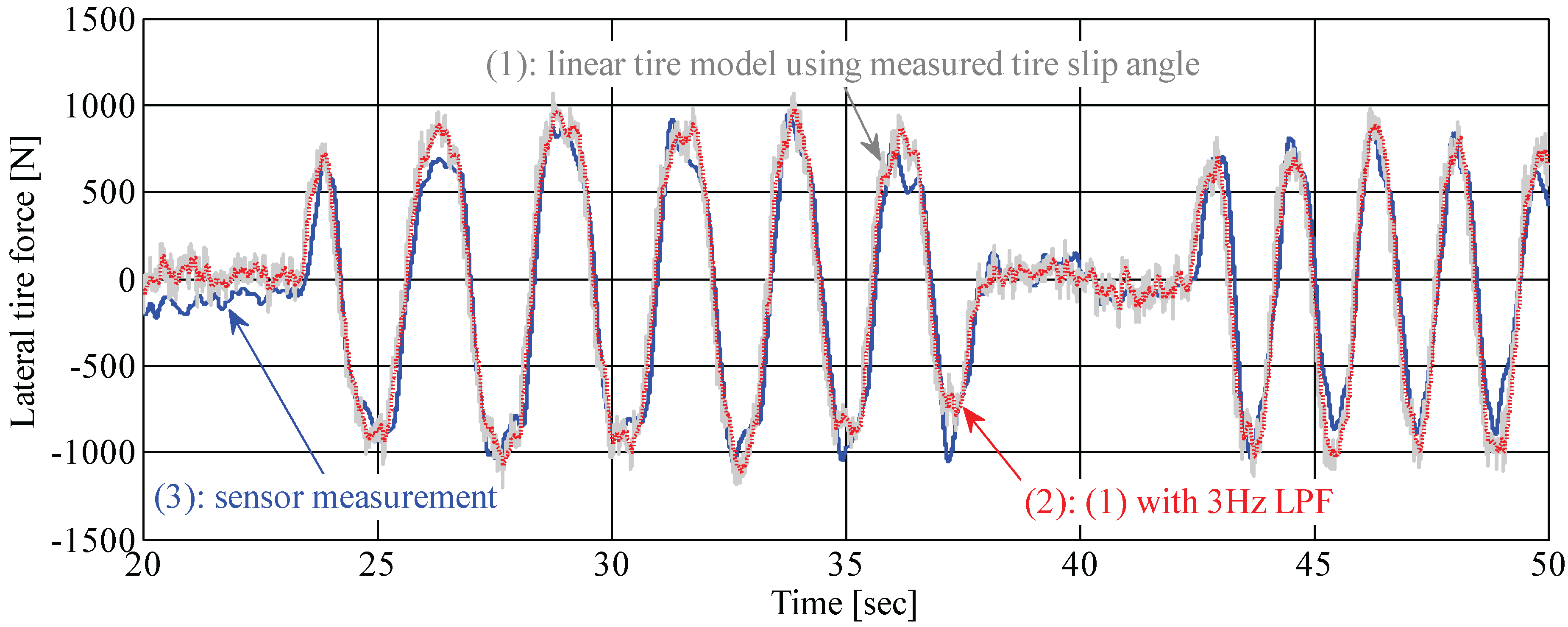
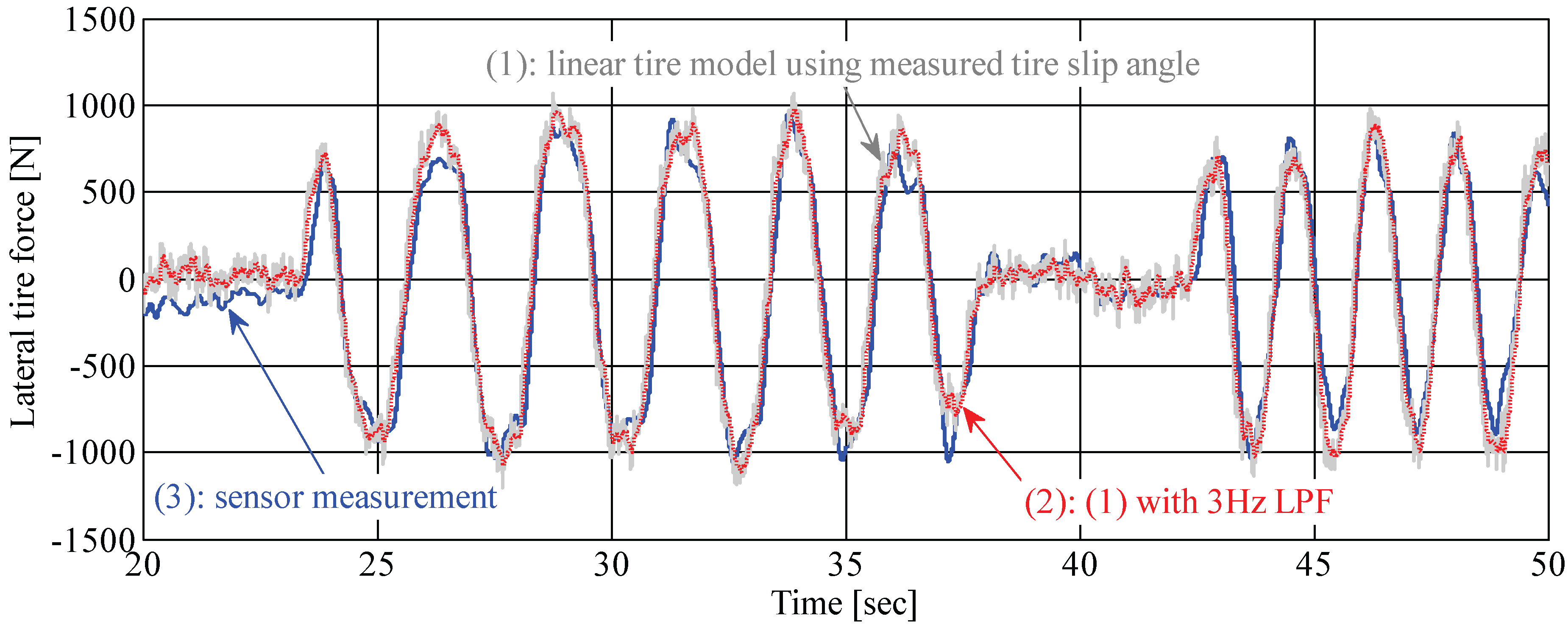
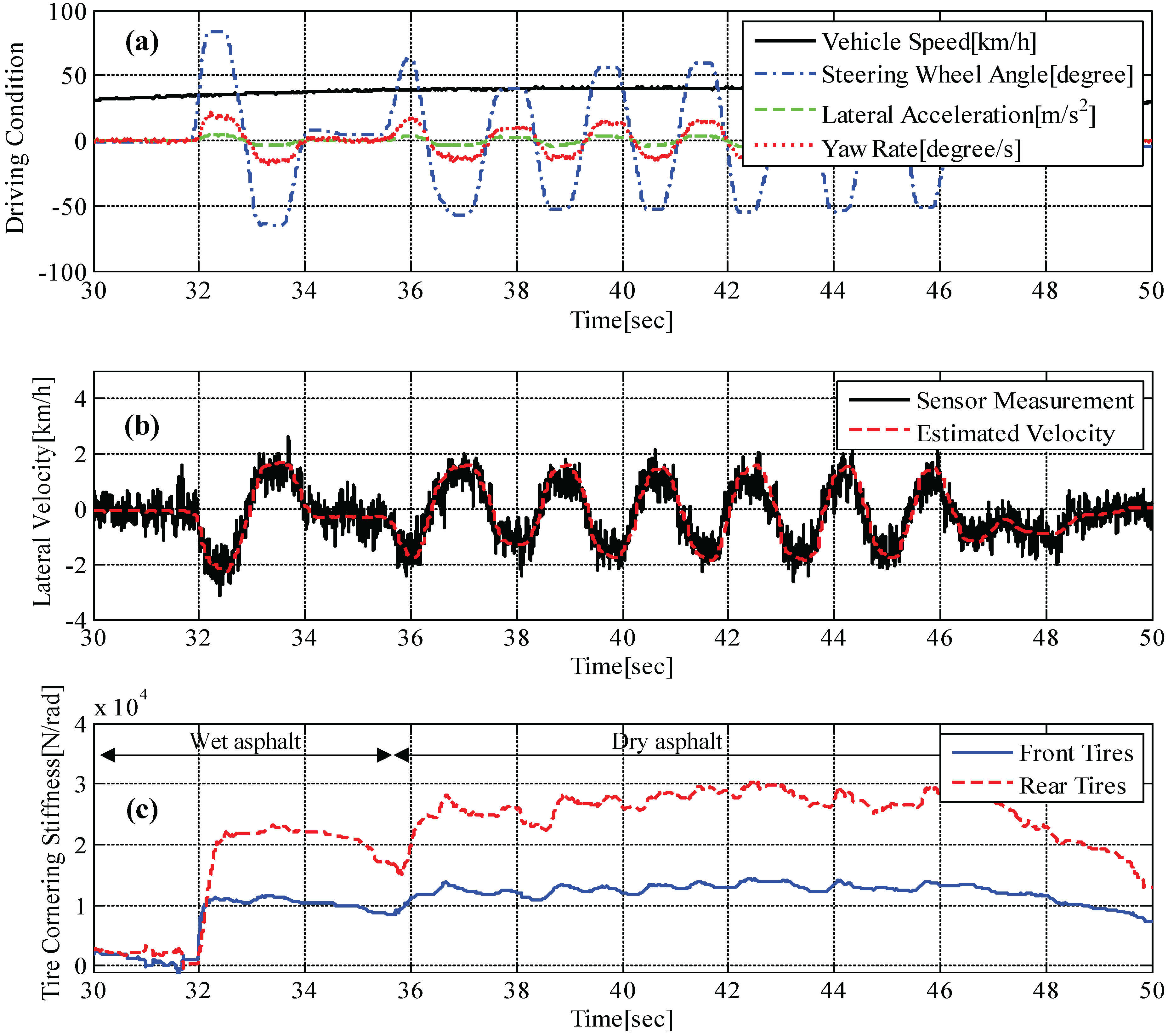
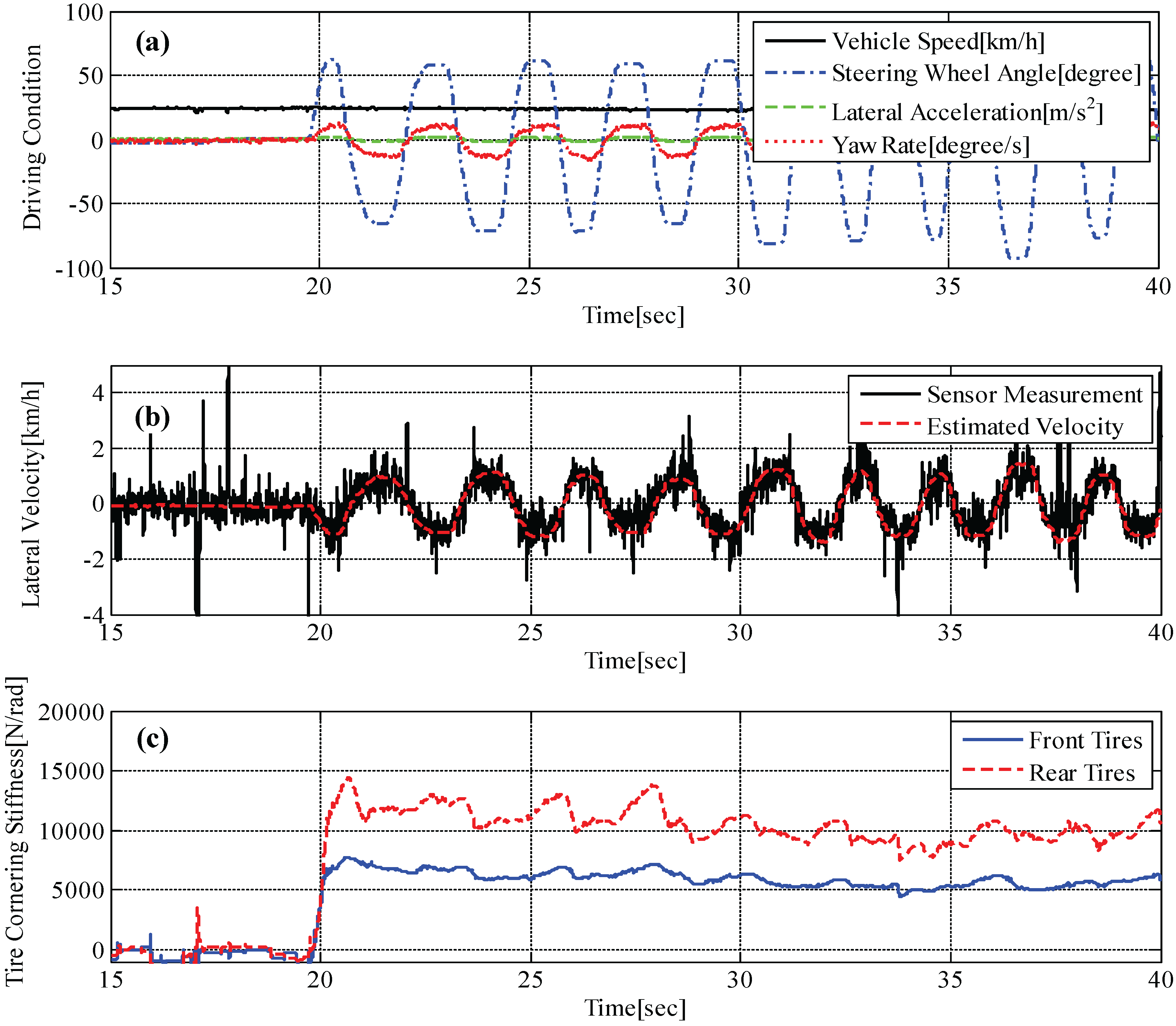
5.2. Experimental Results


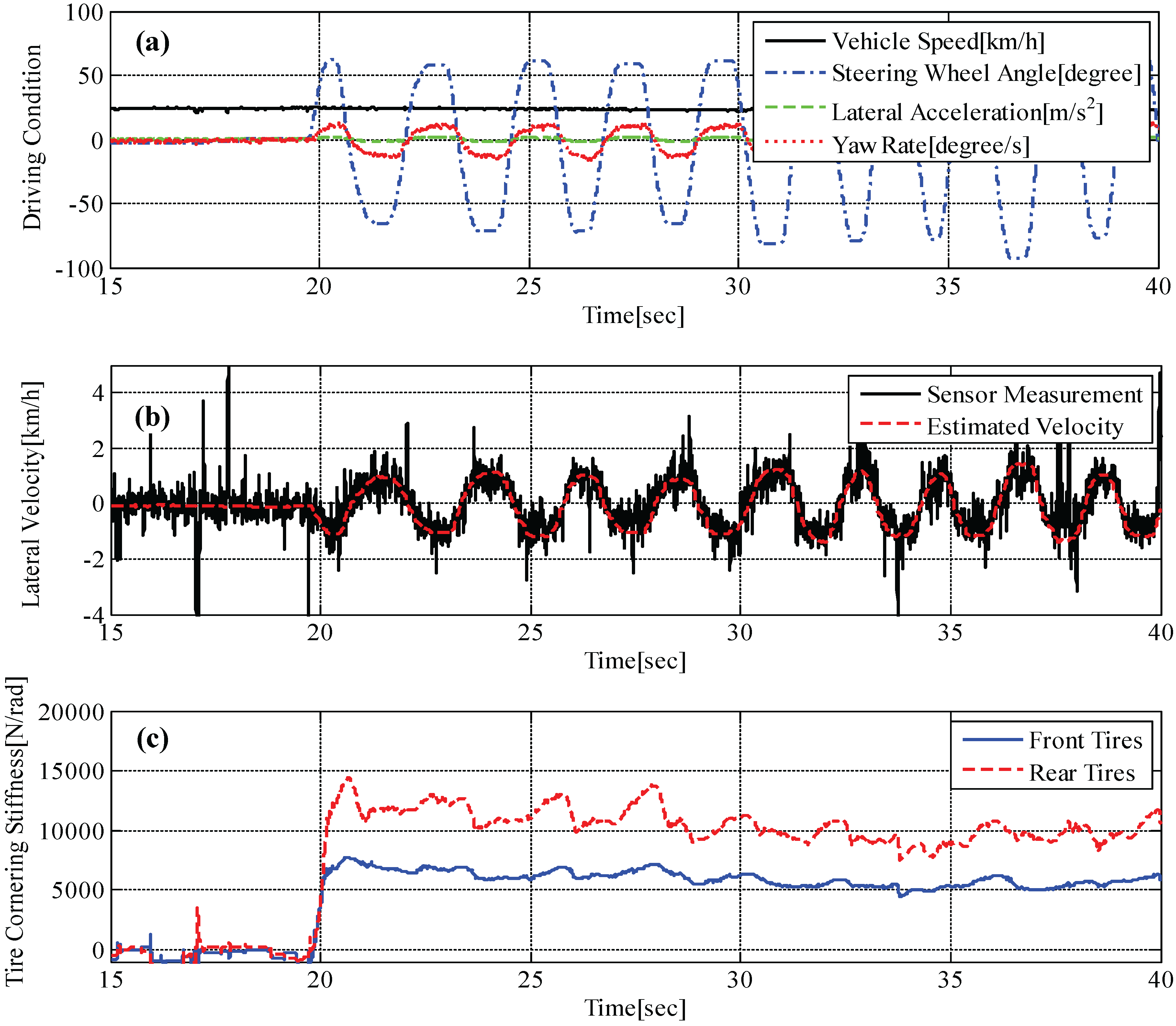
| Road Condition | (N/rad) | (N/rad) |
|---|---|---|
| Dry asphalt () | 12500 | 29200 |
| Slippery road () | 5900 | 11400 |

6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Nam, K.H.; Fujimoto, H.; Hori, Y. Lateral stability control of in-wheel-motor-driven electric vehicles based on sideslip angle estimation using lateral tire force sensors. IEEE Trans. Veh. Technol. 2012, 61, 1972–1985. [Google Scholar] [CrossRef]
- Yin, G.; Wang, R.; Wang, J. Robust control for four wheel independently-actuated electric ground vehicles by external yaw-moment generation. Int. J. Autom. Technol. 2015, 16, 839–847. [Google Scholar] [CrossRef]
- Lian, Y.F.; Zhao, Y.; Hu, L.L.; Tian, Y.T. Cornering stiffness and sideslip angle estimation based on simplified lateral dynamic models for four-in-wheel-motor-driven electric vehicles with lateral tire force information. Int. J. Autom. Technol. 2015, 16, 669–683. [Google Scholar] [CrossRef]
- Viehweider, A.; Nam, K.H.; Fujimoto, H.; Hori, Y. Evaluation of a betaless instantaneous cornering stiffness estimation scheme for electric vehicles. In Proceedings of the 2012 13th Int’l Workshop on 2012 9th France-Japan 7th Europe-Asia Congress on and Research and Education in Mechatronics (REM), Paris, French, 21–23 November 2012; pp. 272–279.
- Christian, L.; Thomas, B.S. Recursive identification of cornering stiffness parameters for an enhanced single track model. In Proceedings of the 15th IFAC Symposium on System Identification, Saint-Malo, France, 6–8 July 2009; volume 15, pp. 1726–1731.
- Sierra, C.; Tseng, E.; Jain, A.; Peng, H. Cornering stiffness estimation based on vehicle lateral dynamics. Veh. Syst. Dyn. 2006, 44, 24–38. [Google Scholar] [CrossRef]
- Baffet, G.; Charara, A.; Lechner, D. Estimation of vehicle sideslip, tire force and wheel cornering stiffness. Control Eng. Pract. 2009, 17, 1255–1264. [Google Scholar] [CrossRef]
- Hsu, L.Y.; Chen, T.L. Vehicle full-state estimation and prediction system using state observers. IEEE Trans. Veh. Technol. 2009, 58, 2651–2662. [Google Scholar] [CrossRef]
- Ko, S.Y.; Ko, J.W.; Lee, S.M.; Cheon, J.S.; Kim, H.S. Vehicle velocity estimation using effective inertia for an in-wheel electric vehicle. Int. J. Autom. Technol. 2014, 15, 815–821. [Google Scholar] [CrossRef]
- Shino, M.; Yoshitake, H.; Hiramatsu, M.; Sunda, T.; Kamata, M. Deviated state detection method in driving around curves based on naturalistic driving behavior database for driver assistance systems. Int. J. Autom. Technol. 2014, 15, 749–755. [Google Scholar] [CrossRef]
- Bevly, D.M.; Gerdes, J.C.; Wilson, C. The Use of GPS based velocity measurements for measurement of sideslip and wheel slip. Veh. Syst. Dyn. 2002, 38, 127–147. [Google Scholar]
- Bevly, D.M.; Ryu, J.H.; Gerdes, J.C. Integrating INS sensors with GPS measurements for continuous estimation of vehicle sideslip, roll, and tire cornering stiffness. IEEE Trans. Intell. Transp. Syst. 2006, 61, 1972–1985. [Google Scholar] [CrossRef]
- Wu, Z.; Yao, M.; Ma, H.; Jia, W. Improving accuracy of the vehicle attitude estimation for low-cost INS/GPS integration aided by the GPS-Measured course angle. IEEE Trans. Intell. Transp. Syst. 2002, 38, 127–147. [Google Scholar] [CrossRef]
- Tuononen, A.J. Vehicle lateral state estimation based on measured tire forces. Sensors 2009, 9, 8761–8775. [Google Scholar] [CrossRef] [PubMed]
- Nam, K.H.; Oh, S.H.; Fujimoto, H.; Hori, Y. Estimation of sideslip and roll angles of electric vehicles using lateral tire force sensors through RLS and Kalman filter approaches. IEEE Trans. Ind. Electron. 2013, 60, 988–1000. [Google Scholar] [CrossRef]
- Leung, K.T.; Whidborne, J.F.; Purdy, D.; Barber, P. Road vehicle state estimation using low-cost GPS/INS. Mech. Syst. Signal Process. 2011, 25, 1988–2004. [Google Scholar] [CrossRef]
- Mihn, D.H. Attitude estimation for accelerated vehicles using GPS/INS measurements. Control Eng. Pract. 2010, 18, 723–732. [Google Scholar] [CrossRef]
- Corno, M.; Gerard, M.; Verhaegen, M.; Holweg, E. Hybrid ABS control using force measurement. IEEE Trans. Control Syst. Technol. 2012, 20, 1223–1235. [Google Scholar] [CrossRef]
- Morgando, A.; Velardocchia, M.; Vigliani, A.; van Leeuven, G.B.; Ondrak, V. An alternative approach to automotive ESC based on measured wheel forces. Veh. Syst. Dyn. 2011, 49, 1855–1871. [Google Scholar] [CrossRef]
- Rajamani, R. Vehicle Dynamics and Control, 2nd ed.; Springer: New York, NY, USA, 2012. [Google Scholar]
- Abe, M. Vehicle Handling Dynamics: Theory and Application, 1st ed.; Butterworth-Heinemann: Boston, MA, USA, 2009. [Google Scholar]
- Ono, K.; Takizawa, T.; Aoki, M. Preload Measuring Device for Double Row Rolling Bearing Unit. U.S. Patent 2,009,005,282,5A1, 26 February 2009. [Google Scholar]
- Lennart, L. System Identification: Theory for the User, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
© 2015 by the author; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nam, K. Application of Novel Lateral Tire Force Sensors to Vehicle Parameter Estimation of Electric Vehicles. Sensors 2015, 15, 28385-28401. https://doi.org/10.3390/s151128385
Nam K. Application of Novel Lateral Tire Force Sensors to Vehicle Parameter Estimation of Electric Vehicles. Sensors. 2015; 15(11):28385-28401. https://doi.org/10.3390/s151128385
Chicago/Turabian StyleNam, Kanghyun. 2015. "Application of Novel Lateral Tire Force Sensors to Vehicle Parameter Estimation of Electric Vehicles" Sensors 15, no. 11: 28385-28401. https://doi.org/10.3390/s151128385
APA StyleNam, K. (2015). Application of Novel Lateral Tire Force Sensors to Vehicle Parameter Estimation of Electric Vehicles. Sensors, 15(11), 28385-28401. https://doi.org/10.3390/s151128385