
Anisotropic and Highly Sensitive Flexible Strain Sensors Based on Carbon Nanotubes and Iron Nanowires for Human–Computer Interaction Systems


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Results and Discussion
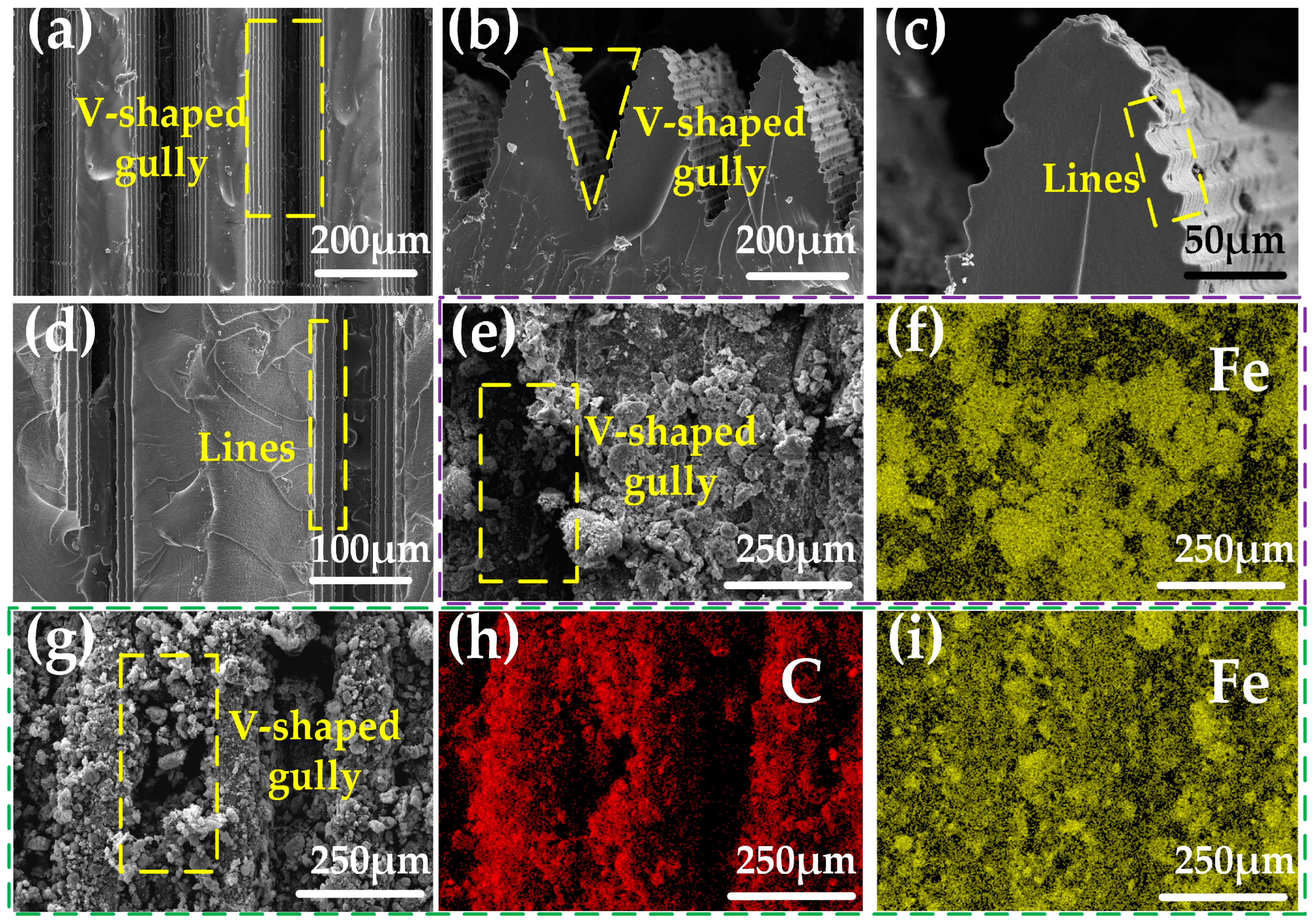
2.1. Characterization of V-Grooves and Conductive Networks
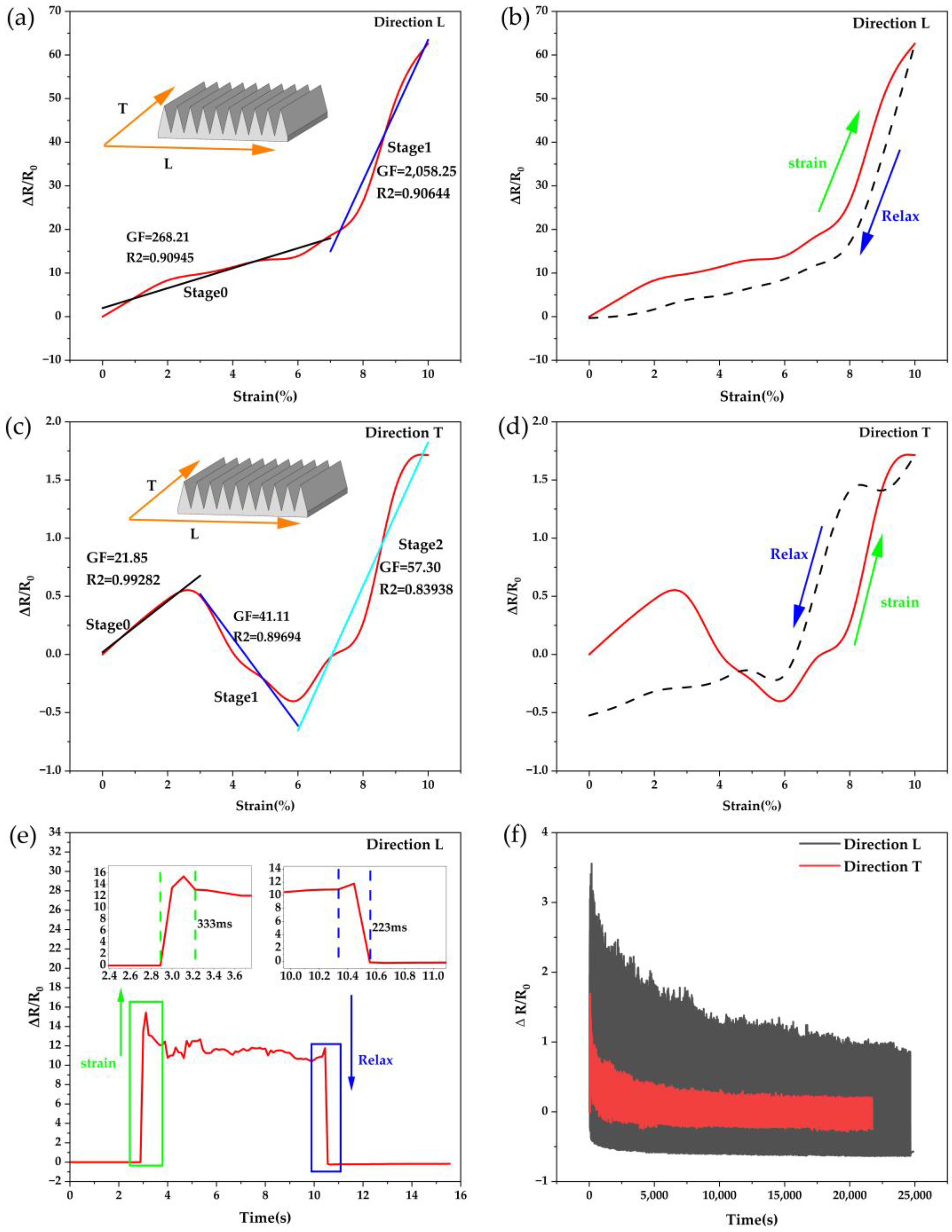
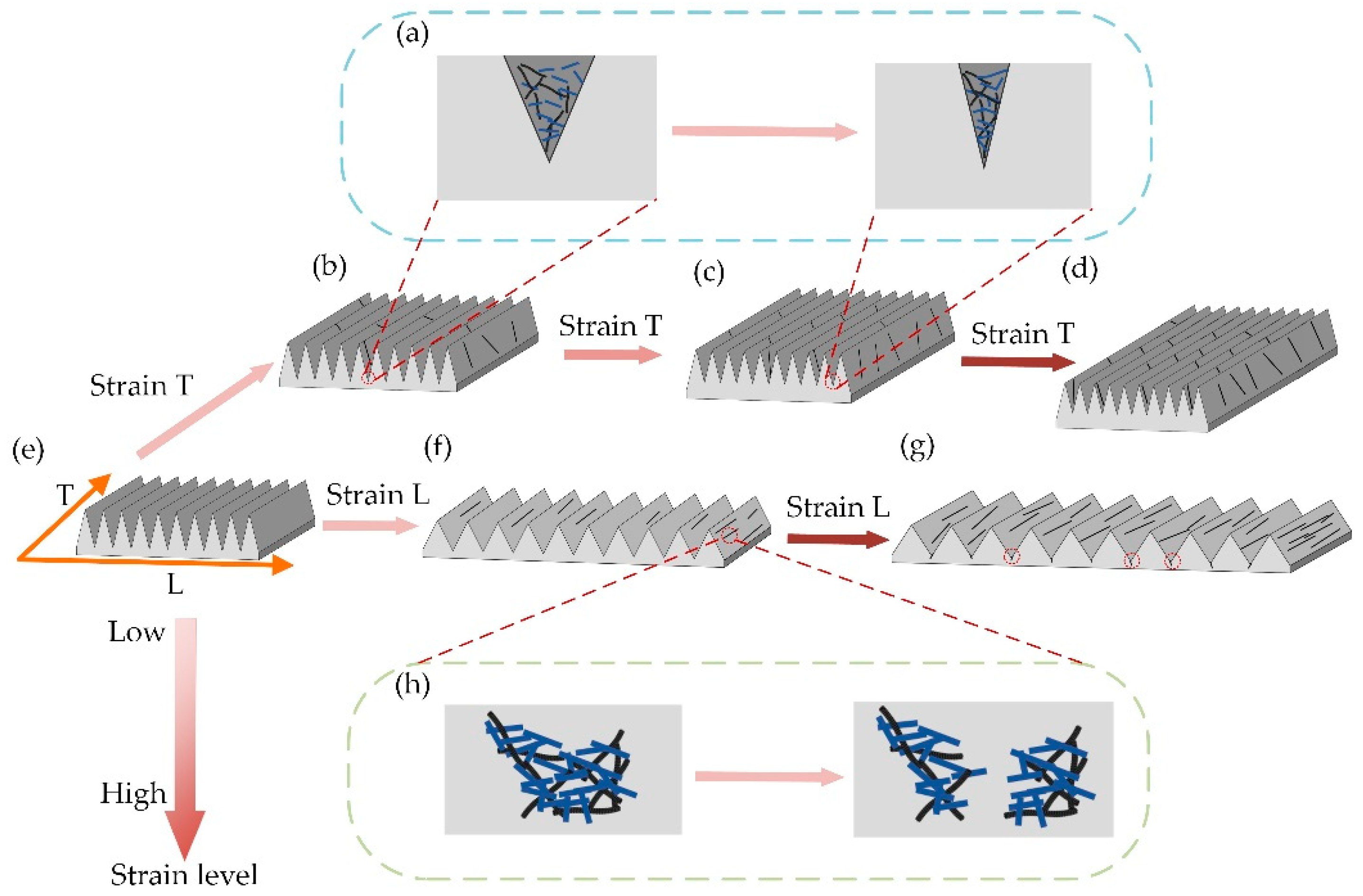
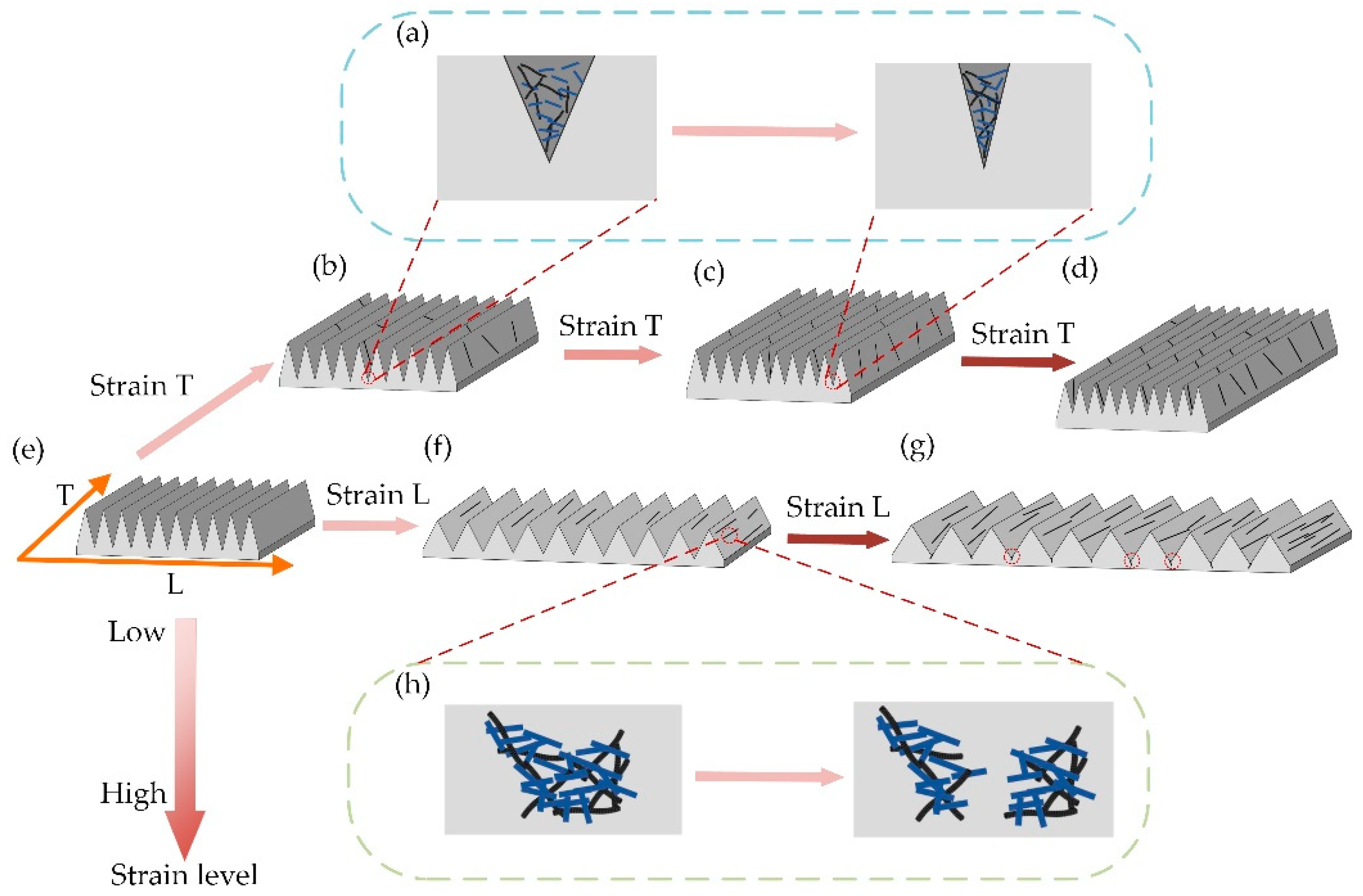
2.2. Tensile Sensing Performance of V-Groove Flexible Sensors
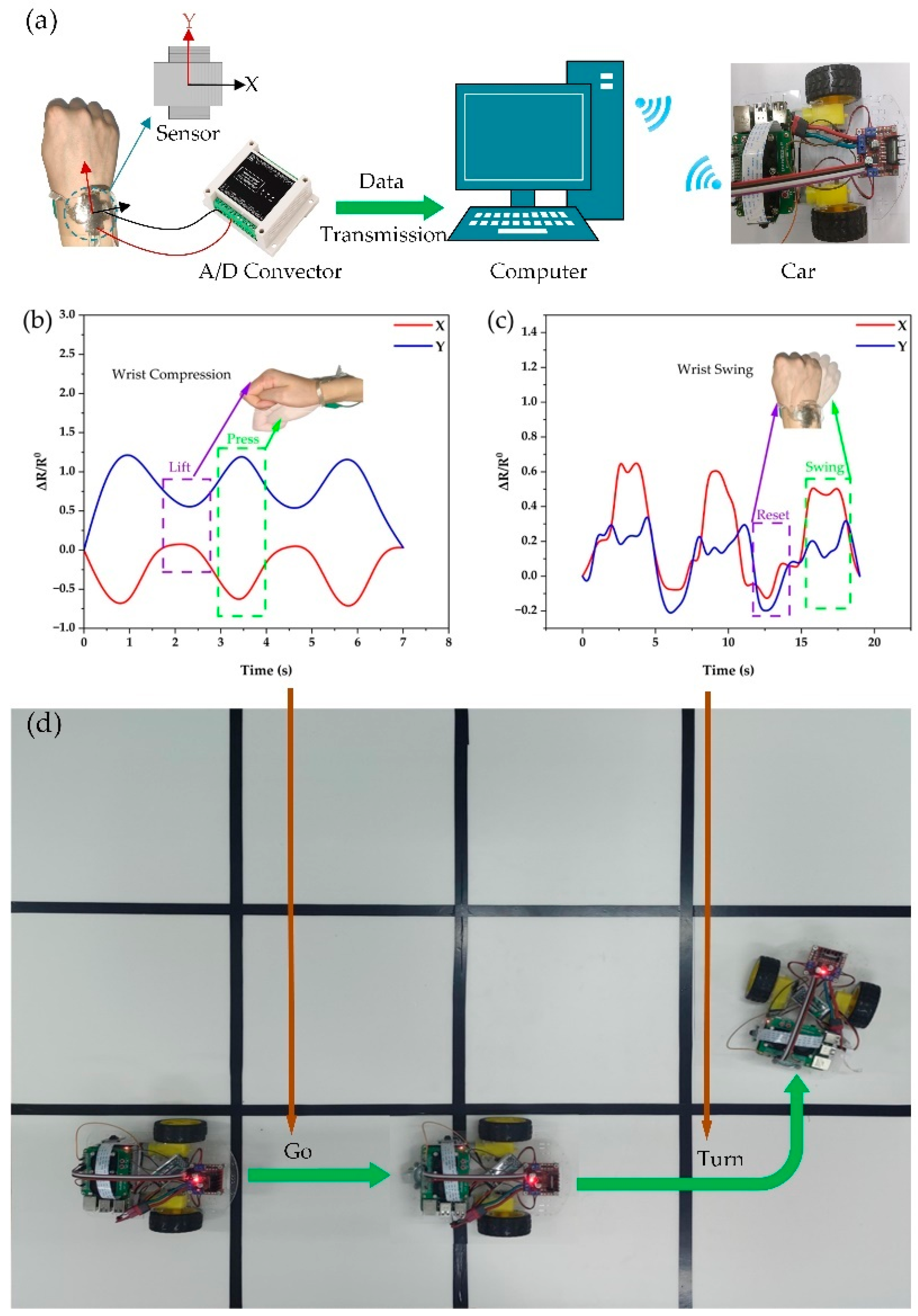
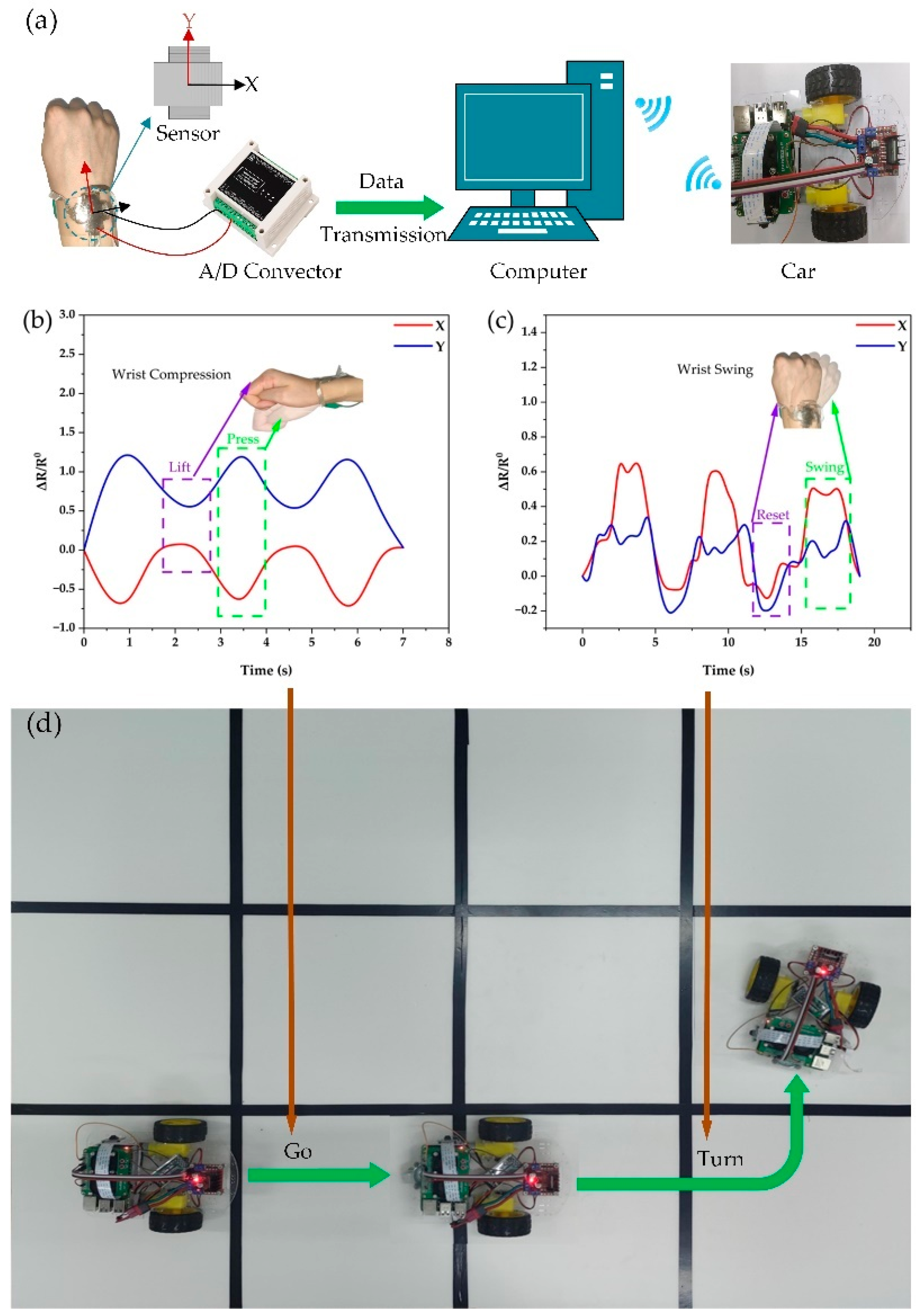
2.3. Sensor Applications in HCI
3. Materials and Methods
3.1. Materials
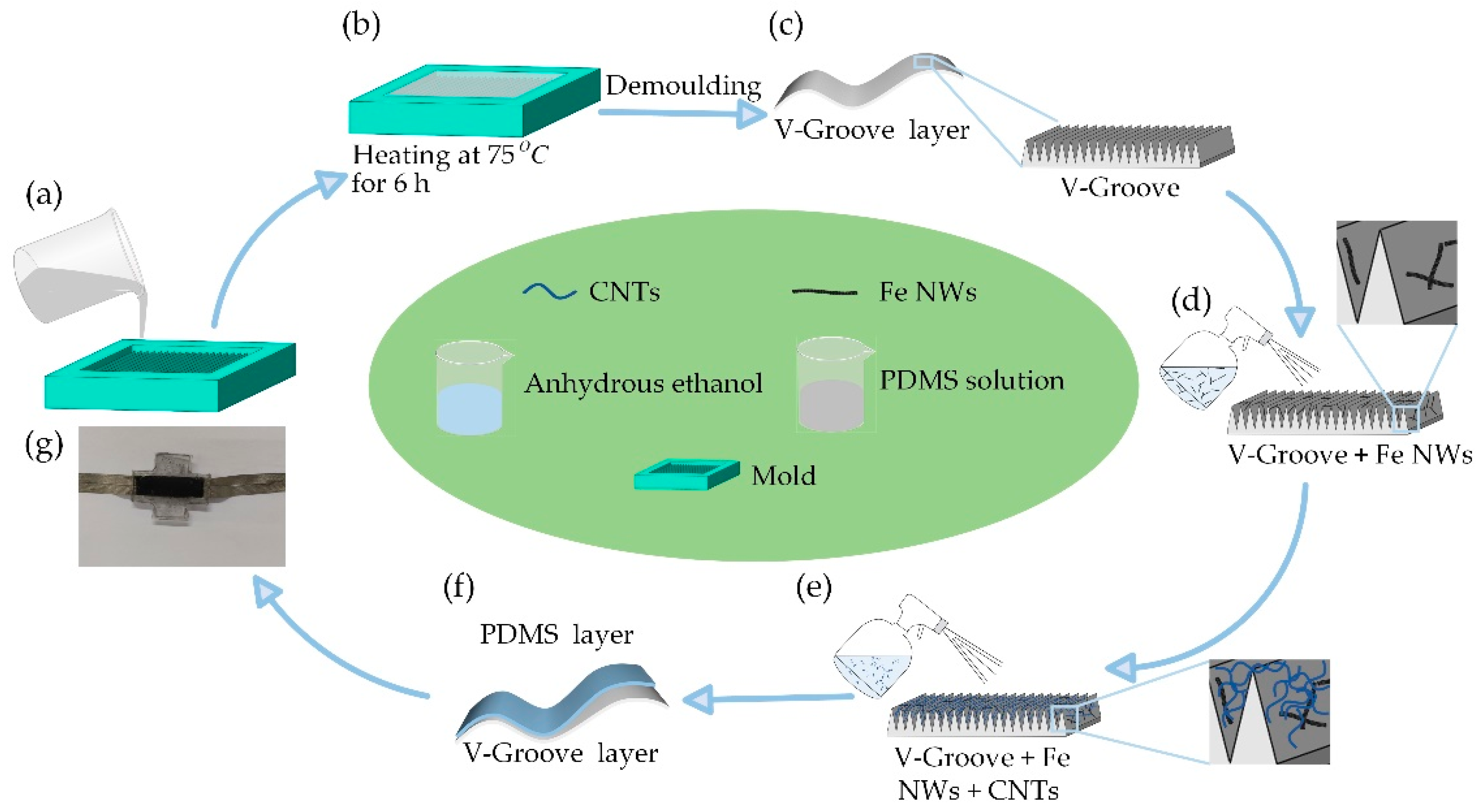
3.2. Methods
3.3. Characterization
4. Conclusions
- (1)
- The high-aspect-ratio V-groove has been designed to increase the sensor’s sensitivity and realize its anisotropy. This high-aspect-ratio V-groove design has enabled the sensor to achieve a 35.92-times-higher sensitivity variability in the mutually perpendicular directions L and T. Furthermore, the sensor has consistently maintained a high sensitivity in direction L across the entire operating range. It has exhibited a value of GF = 268.21 for stretching below 8% and a value of GF = 2058.25 for stretching between 8% and 10%. The sprayed Fe NWs solution and CNTs solution have formed a conductive network with excellent electrical conductivity, making the sensor preparation simple, with less-sensitive materials, and more economical.
- (2)
- The double-layer structure sensors are assembled in a mutually orthogonal way as the input devices of HCI system to realize the remote control of the motion of a trolley, and this has effectively proven that the sensor preparation method proposed in this paper can be applied in the complex HCI field.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, C.; Gong, D.; Feng, P.; Cheng, Y.; Cheng, X.; Jiang, Y.; Zhang, D.; Cai, J. Ultra-Sensitive and Wide Sensing-Range Flexible Pressure Sensors Based on the Carbon Nanotube Film/Stress-Induced Square Frustum Structure. ACS Appl. Mater. Interfaces 2023, 15, 8546–8554. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Liu, E.; Hao, S.; Yang, X.; Li, T.; Lou, C.; Run, M.; Song, H. 3D Printable, Ultra-Stretchable, Self-Healable, and Self-Adhesive Dual Cross-Linked Nanocomposite Ionogels as Ultra-Durable Strain Sensors for Motion Detection and Wearable Human-Machine Interface. Chem. Eng. J. 2022, 431, 133949. [Google Scholar] [CrossRef]
- Guo, X.; Hong, W.; Zhang, T.; Li, H.; Zhu, T.; Hong, Q.; Wang, D.; Liu, L.; Zhao, Y.; Wang, D. Highly Stretchable, Responsive Flexible Dual-Mode Magnetic Strain Sensor. Adv. Mater. Technol. 2023, 8, 2201439. [Google Scholar] [CrossRef]
- Khalid, M.A.U.; Chang, S.H. Flexible Strain Sensors for Wearable Applications Fabricated Using Novel Functional Nanocomposites: A Review. Compos. Struct. 2022, 284, 115214. [Google Scholar] [CrossRef]
- Dong, B.; Yang, Y.; Shi, Q.; Xu, S.; Sun, Z.; Zhu, S.; Zhang, Z.; Kwong, D.-L.; Zhou, G.; Ang, K.-W.; et al. Wearable Triboelectric-Human–Machine Interface (THMI) Using Robust Nanophotonic Readout. ACS Nano 2020, 14, 8915–8930. [Google Scholar] [CrossRef] [PubMed]
- Wang, K.; Yap, L.W.; Gong, S.; Wang, R.; Wang, S.J.; Cheng, W. Nanowire-Based Soft Wearable Human–Machine Interfaces for Future Virtual and Augmented Reality Applications. Adv. Funct. Mater. 2021, 31, 2008347. [Google Scholar] [CrossRef]
- Yin, R.; Wang, D.; Zhao, S.; Lou, Z.; Shen, G. Wearable Sensors-Enabled Human–Machine Interaction Systems: From Design to Application. Adv. Funct. Mater. 2021, 31, 2008936. [Google Scholar] [CrossRef]
- Pyo, S.; Lee, J.; Bae, K.; Sim, S.; Kim, J. Recent Progress in Flexible Tactile Sensors for Human-Interactive Systems: From Sensors to Advanced Applications. Adv. Mater. 2021, 33, 2005902. [Google Scholar] [CrossRef]
- Yang, P.; Xiang, S.; Li, R.; Ruan, H.; Chen, D.; Zhou, Z.; Huang, X.; Liu, Z. Highly Stretchable and Sensitive Flexible Strain Sensor Based on Fe NWs/Graphene/PEDOT:PSS with a Porous Structure. Int. J. Mol. Sci. 2022, 23, 8895. [Google Scholar] [CrossRef]
- Wang, W.; Yang, S.; Ding, K.; Jiao, L.; Yan, J.; Zhao, W.; Ma, Y.; Wang, T.; Cheng, B.; Ni, Y. Biomaterials-and Biostructures Inspired High-Performance Flexible Stretchable Strain Sensors: A Review. Chem. Eng. J. 2021, 425, 129949. [Google Scholar] [CrossRef]
- Zhou, P.; Zheng, Z.; Wang, B.; Guo, Y. Self-Powered Flexible Piezoelectric Sensors Based on Self-Assembled 10 Nm BaTiO₃ Nanocubes on Glass Fiber Fabric. Nano Energy 2022, 99, 10740. [Google Scholar] [CrossRef]
- Qu, X.; Wang, S.; Zhao, Y.; Huang, H.; Wang, Q.; Shao, J.; Wang, W.; Dong, X. Skin-Inspired Highly Stretchable, Tough and Adhesive Hydrogels for Tissue-Attached Sensor. Chem. Eng. J. 2021, 425, 131523. [Google Scholar] [CrossRef]
- Hu, X.; Yang, F.; Wu, M.; Sui, Y.; Guo, D.; Li, M.; Kang, Z.; Sun, J.; Liu, J. A Super-Stretchable and Highly Sensitive Carbon Nanotube Capacitive Strain Sensor for Wearable Applications and Soft Robotics. Adv. Mater. Technol. 2022, 7, 2100769. [Google Scholar] [CrossRef]
- Xiong, Y.; Shen, Y.; Tian, L.; Hu, Y.; Zhu, P.; Sun, R.; Wong, C.-P. A Flexible, Ultra-Highly Sensitive and Stable Capacitive Pressure Sensor with Convex Microarrays for Motion and Health Monitoring. Nano Energy 2020, 70, 104436. [Google Scholar] [CrossRef]
- Huang, J.; Yang, X.; Yu, J.; Han, J.; Jia, C.; Ding, M.; Sun, J.; Cao, X.; Sun, Q.; Wang, Z.L. A Universal and Arbitrary Tactile Interactive System Based on Self-Powered Optical Communication. Nano Energy 2020, 69, 104419. [Google Scholar] [CrossRef]
- Wang, Z.; Bu, M.; Xiu, K.; Sun, J.; Hu, N.; Zhao, L.; Gao, L.; Kong, F.; Zhu, H.; Song, J. A Flexible, Stretchable and Triboelectric Smart Sensor Based on Graphene Oxide and Polyacrylamide Hydrogel for High Precision Gait Recognition in Parkinsonian and Hemiplegic Patients. Nano Energy 2022, 104, 107978. [Google Scholar] [CrossRef]
- Wang, R.; Sun, L.; Zhu, X.; Ge, W.; Li, H.; Li, Z.; Zhang, H.; Huang, Y.; Li, Z.; Zhang, Y.; et al. Carbon Nanotube-Based Strain Sensors: Structures, Fabrication, and Applications. Adv. Mater. Technol. 2023, 8, 2200855. [Google Scholar] [CrossRef]
- Wang, X.; Tang, Y.; Cheng, S.; Gao, Q.; Yuan, Y.; Li, A.; Guan, S. PDMS-Based Conductive Elastomeric Composite with 3D Reduced Graphene Oxide Conductive Network for Flexible Strain Sensor. Compos. Part A 2022, 161, 107113. [Google Scholar] [CrossRef]
- Chen, Z.; Jin, L.; Hao, W.; Ren, W.; Cheng, H.-M. Synthesis and Applications of Three-Dimensional Graphene Network Structures. Mater. Today Nano 2019, 5, 100027. [Google Scholar] [CrossRef]
- Chen, Z.; Ren, W.; Gao, L.; Liu, B.; Pei, S.; Cheng, H.-M. Three-Dimensional Flexible and Conductive Interconnected Graphene Networks Grown by Chemical Vapour Deposition. Nat. Mater. 2011, 10, 424–428. [Google Scholar] [CrossRef]
- Huang, X.; Wang, L.; Shen, Z.; Ren, J.; Chen, G.; Li, Q.; Zhou, Z. Super-Stretchable and Self-Healing Hydrogel with a Three-Dimensional Silver Nanowires Network Structure for Wearable Sensor and Electromagnetic Interference Shielding. Chem. Eng. J. 2022, 446, 137136. [Google Scholar] [CrossRef]
- Zhao, X.; Guo, H.; Ding, P.; Zhai, W.; Liu, C.; Shen, C.; Dai, K. Hollow-Porous Fiber-Shaped Strain Sensor with Multiple Wrinkle-Crack Microstructure for Strain Visualization and Wind Monitoring. Nano Energy 2023, 108, 108197. [Google Scholar] [CrossRef]
- Fang, X.; Min, L.; Qin, Z.; Gong, S.; Zhao, B.; Lv, Y.; Pan, K. High-Performance MXene-Based Flexible and Wearable Pressure Sensor Based on a Micro-Pyramid Structured Active Layer. Adv. Mater. Technol. 2023, 8, 2200291. [Google Scholar] [CrossRef]
- Yang, P.; Liu, Z.; Luo, J.; Li, R.; Lu, Y.; Huang, X.; Zhang, Q.; Zhou, Z. Highly Sensitive and Dynamically Stable Strain Sensors Based on Porous-Designed Fe Nanowires/Multi-Walled Carbon Nanotubes with Stable Bi-Conducting Networks. Sci. China Technol. Sci. 2022, 65, 2990–2999. [Google Scholar] [CrossRef]
- Qu, M.; Qin, Y.; Sun, Y.; Xu, H.; Schubert, D.W.; Zheng, K.; Xu, W.; Nilsson, F. Biocompatible, Flexible Strain Sensor Fabricated with Polydopamine-Coated Nanocomposites of Nitrile Rubber and Carbon Black. ACS Appl. Mater. Interfaces 2020, 12, 42140–42152. [Google Scholar] [CrossRef] [PubMed]
- Yin, Y.; Wang, Y.; Li, H.; Xu, J.; Zhang, C.; Li, X.; Cao, J.; Feng, H.; Zhu, G. A Flexible Dual Parameter Sensor with Hierarchical Porous Structure for Fully Decoupled Pressure–Temperature Sensing. Chem. Eng. J. 2022, 430, 133158. [Google Scholar] [CrossRef]
- Cai, J.; Du, M.; Li, Z. Flexible Temperature Sensors Constructed with Fiber Materials. Adv. Mater. Technol. 2022, 7, 2101182. [Google Scholar] [CrossRef]
- Zhang, Y.; Lin, H.; Zhang, L.; Peng, S.; Weng, Z.; Wang, J.; Wu, L.; Zheng, L. Mechanical Exfoliation Assisted with Carbon Nanospheres to Prepare a Few-Layer Graphene for Flexible Strain Sensor. Appl. Surf. Sci. 2023, 611, 155649. [Google Scholar] [CrossRef]
- Zhang, D.; Yin, R.; Zheng, Y.; Li, Q.; Liu, H.; Liu, C.; Shen, C. Multifunctional MXene/CNTs Based Flexible Electronic Textile with Excellent Strain Sensing, Electromagnetic Interference Shielding and Joule Heating Performances. Chem. Eng. J. 2022, 438, 135587. [Google Scholar] [CrossRef]
- Zhou, B.; Li, C.; Zhou, Y.; Liu, Z.; Gao, X.; Wang, X.; Jiang, L.; Tian, M.; Zhou, F.-L.; Jerrams, S.; et al. A Flexible Dual-Mode Pressure Sensor with Ultra-High Sensitivity Based on BTO@MWCNTs Core-Shell Nanofibers. Compos. Sci. Technol. 2022, 224, 109478. [Google Scholar] [CrossRef]
- Yang, P.; Qu, Z.; Ruan, H.; Huang, Y.; Huang, X.; Li, W.; Xia, T.; Gao, B.; Li, R. Nanostructured Films of Ordered Fe Nanowires for High-Performance Transparent Electromagnetic Interference Shielding. ACS Appl. Nano Mater. 2023, 6, 8540–8549. [Google Scholar] [CrossRef]
- Yang, P.; Cai, R.; Ruan, H.; Zhao, M.; Huang, X.; Zhang, N.; Li, R.; Zhang, Y.; Luo, J. In Situ Synthesis of Heterostructured Fe-Ni Nanowires with Tunable Electromagnetic Wave Absorption Capabilities. ACS Appl. Nano Mater. 2023, 6, 14322–14331. [Google Scholar] [CrossRef]
- Chao, M.; Di, P.; Yuan, Y.; Xu, Y.; Zhang, L.; Wan, P. Flexible Breathable Photothermal-Therapy Epidermic Sensor with MXene for Ultrasensitive Wearable Human-Machine Interaction. Nano Energy 2023, 108, 108201. [Google Scholar] [CrossRef]
- Zhu, K.; Yang, K.; Zhang, Y.; Yang, Z.; Qian, Z.; Li, N.; Li, L.; Jiang, G.; Wang, T.; Zong, S. Wearable SERS Sensor Based on Omnidirectional Plasmonic Nanovoids Array with Ultra-high Sensitivity and Stability. Small 2022, 18, 2201508. [Google Scholar] [CrossRef] [PubMed]
- Na, H.R.; Lee, H.J.; Jeon, J.H.; Kim, H.-J.; Jerng, S.-K.; Roy, S.B.; Chun, S.-H.; Lee, S.; Yun, Y.J. Vertical Graphene on Flexible Substrate, Overcoming Limits of Crack-Based Resistive Strain Sensors. Npj Flexible Electron. 2022, 6, 2. [Google Scholar] [CrossRef]
- Liu, D.; Zhang, H.; Chen, H.; Lee, J.-H.; Guo, F.; Shen, X.; Zheng, Q.; Kim, J.-K. Wrinkled, Cracked and Bridged Carbon Networks for Highly Sensitive and Stretchable Strain Sensors. Compos. Part A 2022, 163, 107221. [Google Scholar] [CrossRef]
- Yu, X.; Wu, Z.; Weng, L.; Jiang, D.; Algadi, H.; Qin, Z.; Guo, Z.; Xu, B.B. Flexible Strain Sensor Enabled by Carbon Nanotubes- Decorated Electrospun TPU Membrane for Human Motion Monitoring. Adv. Mater. Interfaces 2023, 10, 2202292. [Google Scholar] [CrossRef]
- Dong, H.; Sun, J.; Liu, X.; Jiang, X.; Lu, S. Highly Sensitive and Stretchable MXene/CNTs/TPU Composite Strain Sensor with Bilayer Conductive Structure for Human Motion Detection. ACS Appl. Mater. Interfaces 2022, 14, 15504–15516. [Google Scholar] [CrossRef]
- Li, R.; Gou, X.; Lee, C.H.; Ruan, H.; Wang, X.; Zhou, Z.; Huang, X.; Liu, Z.; Yang, P. Fe NWs/CNT/PUS Composite Constructed Rigid-Flexible Coupling 3D Porous Structure with Highly Linear Response and Large Strain for Strain Sensor. Sens. Actuators A 2023, 353, 114211. [Google Scholar] [CrossRef]
- Yang, P.; Liu, Z.; Zou, L.; Li, R.; Zhou, Z.; Deng, W.; Shou, M.; Wang, X.; Luo, J. Optimal Design and Fabrication of Stable Ordered Porous Conductive Structure for Flexible Strain Sensors with High Sensitivity and Linearity. Diamond Relat. Mater. 2023, 136, 109990. [Google Scholar] [CrossRef]
- Ji, J.; Zhang, C.; Yang, S.; Liu, Y.; Wang, J.; Shi, Z. High Sensitivity and a Wide Sensing Range Flexible Strain Sensor Based on the V-Groove/Wrinkles Hierarchical Array. ACS Appl. Mater. Interfaces 2022, 14, 24059–24066. [Google Scholar] [CrossRef]
- Yuan, Q.; Jiang, H.; Gao, T.; Zhang, S.; Jia, S.; Wu, T.; Qu, J. Efficient Fabrication of Highly Stretchable and Ultrasensitive Thermoplastic Polyurethane/Carbon Nanotube Foam with Anisotropic Pore Structures for Human Motion Monitoring. J. Mater. Chem. A 2023, 11, 7447–7456. [Google Scholar]
- Wang, Q.; Huang, X.; Han, F.; Wu, Y.; Wang, L.; Dai, H.; Song, P.; Tang, L.; Gao, J. Superhydrophobic, Biocompatible and Durable Nanofiber Composite with an Asymmetric Structure for Anisotropic Strain Sensing and Body Motion Detection. Chem. Eng. J. 2022, 450, 137899. [Google Scholar] [CrossRef]
- Yang, R.; Song, H.; Zhou, Z.; Yang, S.; Tang, X.; He, J.; Liu, S.; Zeng, Z.; Yang, B.-R.; Gui, X. Ultra-Sensitive, Multi-Directional Flexible Strain Sensors Based on an MXene Film with Periodic Wrinkles. ACS Appl. Mater. Interfaces 2023, 15, 8345–8354. [Google Scholar] [CrossRef] [PubMed]
- Zhu, G.; Ren, P.; Hu, J.; Yang, J.; Jia, Y.; Chen, Z.; Ren, F.; Gao, J. Flexible and Anisotropic Strain Sensors with the Asymmetrical Cross-Conducting Network for Versatile Bio-Mechanical Signal Recognition. ACS Appl. Mater. Interfaces 2021, 13, 44925–44934. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Liu, D.; Lee, J.-H.; Chen, H.; Kim, E.; Shen, X.; Zheng, Q.; Yang, J.; Kim, J.-K. Anisotropic, Wrinkled, and Crack-Bridging Structure for Ultrasensitive, Highly Selective Multidirectional Strain Sensors. Nano Micro Lett. 2021, 13, 122. [Google Scholar] [CrossRef]
- Yang, G.; Tang, X.; Zhao, G.; Li, Y.; Ma, C.; Zhuang, X.; Yan, J. Highly Sensitive, Direction-Aware, and Transparent Strain Sensor Based on Oriented Electrospun Nanofibers for Wearable Electronic Applications. Chem. Eng. J. 2022, 435, 135004. [Google Scholar] [CrossRef]
- Yan, G.; He, S.; Ma, S.; Zeng, A.; Chen, G.; Tang, X.; Sun, Y.; Xu, F.; Zeng, X.; Lin, L. Catechol-Based All-Wood Hydrogels with Anisotropic, Tough, and Flexible Properties for Highly Sensitive Pressure Sensing. Chem. Eng. J. 2022, 427, 131896. [Google Scholar] [CrossRef]
- Wu, Y.; Yan, T.; Zhang, K.; Pan, Z. Flexible and Anisotropic Strain Sensors Based on Highly Aligned Carbon Fiber Membrane for Exercise Monitoring. Adv. Mater. Technol. 2021, 6, 2100643. [Google Scholar] [CrossRef]
- Chen, S.; Song, Y.; Ding, D.; Ling, Z.; Xu, F. Flexible and Anisotropic Strain Sensor Based on Carbonized Crepe Paper with Aligned Cellulose Fibers. Adv. Funct. Mater. 2018, 28, 1802547. [Google Scholar] [CrossRef]
- Liu, F.; Xie, D.; Lv, F.; Shen, L.; Tian, Z.; Zhao, J. Additive Manufacturing of Stretchable Polyurethane/Graphene/Multiwalled Carbon Nanotube-Based Conducting Polymers for Strain Sensing. ACS Appl. Nano Mater. 2023, 6, 4522–4531. [Google Scholar] [CrossRef]
- Guo, D.; Pan, X.; He, H. A Simple and Cost-Effective Method for Improving the Sensitivity of Flexible Strain Sensors Based on Conductive Polymer Composites. Sens. Actuators A 2019, 298, 111608. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, Y.; Li, Z.; Wang, Y.; Dai, K.; Zheng, G.; Liu, C.; Shen, C. The Effect of Filler Dimensionality on the Electromechanical Performance of Polydimethylsiloxane Based Conductive Nanocomposites for Flexible Strain Sensors. Compos. Sci. Technol. 2017, 139, 64–73. [Google Scholar] [CrossRef]
- Liu, L.; Niu, S.; Zhang, J.; Mu, Z.; Li, J.; Li, B.; Meng, X.; Zhang, C.; Wang, Y.; Hou, T.; et al. Bioinspired, Omnidirectional, and Hypersensitive Flexible Strain Sensors. Adv. Mater. 2022, 34, 2200823. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.; Gao, X.; Lu, C.; Yao, D.; Wu, L.; Li, D.; Fang, H.; Shiwei, A.; Sun, Y. Ultrathin Superhydrophobic Flexible Tactile Sensors for Normal and Shear Force Discrimination. ACS Appl. Mater. Interfaces 2021, 13, 55735–55746. [Google Scholar] [CrossRef]
- Liu, L.; Jiao, Z.; Zhang, J.; Wang, Y.; Zhang, C.; Meng, X.; Jiang, X.; Niu, S.; Han, Z.; Ren, L. Bioinspired, Superhydrophobic, and Paper-Based Strain Sensors for Wearable and Underwater Applications. ACS Appl. Mater. Interfaces 2021, 13, 1967–1978. [Google Scholar] [CrossRef]
- Zheng, K.; Gu, F.; Wei, H.; Zhang, L.; Chen, X.; Jin, H.; Pan, S.; Chen, Y.; Wang, S. Flexible, Permeable, and Recyclable Liquid-Metal-Based Transient Circuit Enables Contact/Noncontact Sensing for Wearable Human–Machine Interaction. Small Methods 2023, 7, 2201534. [Google Scholar] [CrossRef] [PubMed]
- Rao, Z.; Ershad, F.; Almasri, A.; Gonzalez, L.; Wu, X.; Yu, C. Soft Electronics for the Skin: From Health Monitors to Human-Machine Interfaces. Adv. Mater. Technol. 2020, 5, 2000233. [Google Scholar] [CrossRef]
- Yang, P.-A.; Huang, Y.; Li, R.; Huang, X.; Ruan, H.; Shou, M.; Li, W.; Zhang, Y.; Li, N.; Dong, L. Optimization of Fe@ Ag Core-Shell Nanowires with Improved Impedance Matching and Microwave Absorption Properties. Chem. Eng. J. 2022, 430, 132878. [Google Scholar] [CrossRef]
- Li, R.; Li, X.; Yang, P.-A.; Ruan, H. High-Aspect-Ratio Iron Nanowires: Magnetic Field-Assisted in Situ Reduction Synthesis and Extensive Parametric Study. Nanotechnology 2020, 31, 145601. [Google Scholar] [CrossRef]
- Merces, L.; De Oliveira, R.F.; Bof Bufon, C.C. Nanoscale Variable-Area Electronic Devices: Contact Mechanics and Hypersensitive Pressure Application. ACS Appl. Mater. Interfaces 2018, 10, 39168–39176. [Google Scholar] [CrossRef] [PubMed]
- Becker, C.; Bao, B.; Karnaushenko, D.D.; Bandari, V.K.; Rivkin, B.; Li, Z.; Faghih, M.; Karnaushenko, D.; Schmidt, O.G. A New Dimension for Magnetosensitive E-Skins: Active Matrix Integrated Micro-Origami Sensor Arrays. Nat. Commun. 2022, 13, 2121. [Google Scholar] [CrossRef] [PubMed]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, D.; Su, Y.; Li, R.; Zhao, J.; Yang, L.; Yang, P. Anisotropic and Highly Sensitive Flexible Strain Sensors Based on Carbon Nanotubes and Iron Nanowires for Human–Computer Interaction Systems. Int. J. Mol. Sci. 2023, 24, 13029. https://doi.org/10.3390/ijms241713029
Wu D, Su Y, Li R, Zhao J, Yang L, Yang P. Anisotropic and Highly Sensitive Flexible Strain Sensors Based on Carbon Nanotubes and Iron Nanowires for Human–Computer Interaction Systems. International Journal of Molecular Sciences. 2023; 24(17):13029. https://doi.org/10.3390/ijms241713029
Chicago/Turabian StyleWu, Decheng, Yinlei Su, Rui Li, Jingyuan Zhao, Li Yang, and Pingan Yang. 2023. "Anisotropic and Highly Sensitive Flexible Strain Sensors Based on Carbon Nanotubes and Iron Nanowires for Human–Computer Interaction Systems" International Journal of Molecular Sciences 24, no. 17: 13029. https://doi.org/10.3390/ijms241713029
APA StyleWu, D., Su, Y., Li, R., Zhao, J., Yang, L., & Yang, P. (2023). Anisotropic and Highly Sensitive Flexible Strain Sensors Based on Carbon Nanotubes and Iron Nanowires for Human–Computer Interaction Systems. International Journal of Molecular Sciences, 24(17), 13029. https://doi.org/10.3390/ijms241713029