Diamond Needles Actuating Triple-Walled Carbon Nanotube to Rotate via Thermal Vibration-Induced Collision


Abstract
1. Introduction
2. Results and Discussion
2.1. Effects of Temperature and Thickness of Diamond on the Rotor’s Rotation
2.2. Rotation of Mid-Tubes in Bearings
2.3. Rotation of the Rotor in Wider Stators
3. Model and Methodology
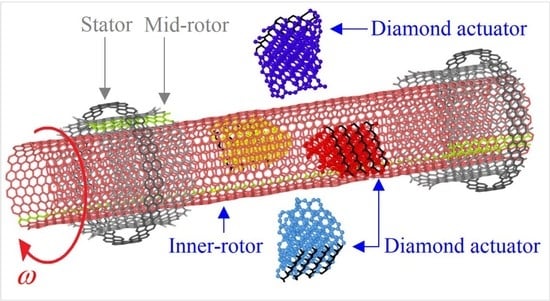
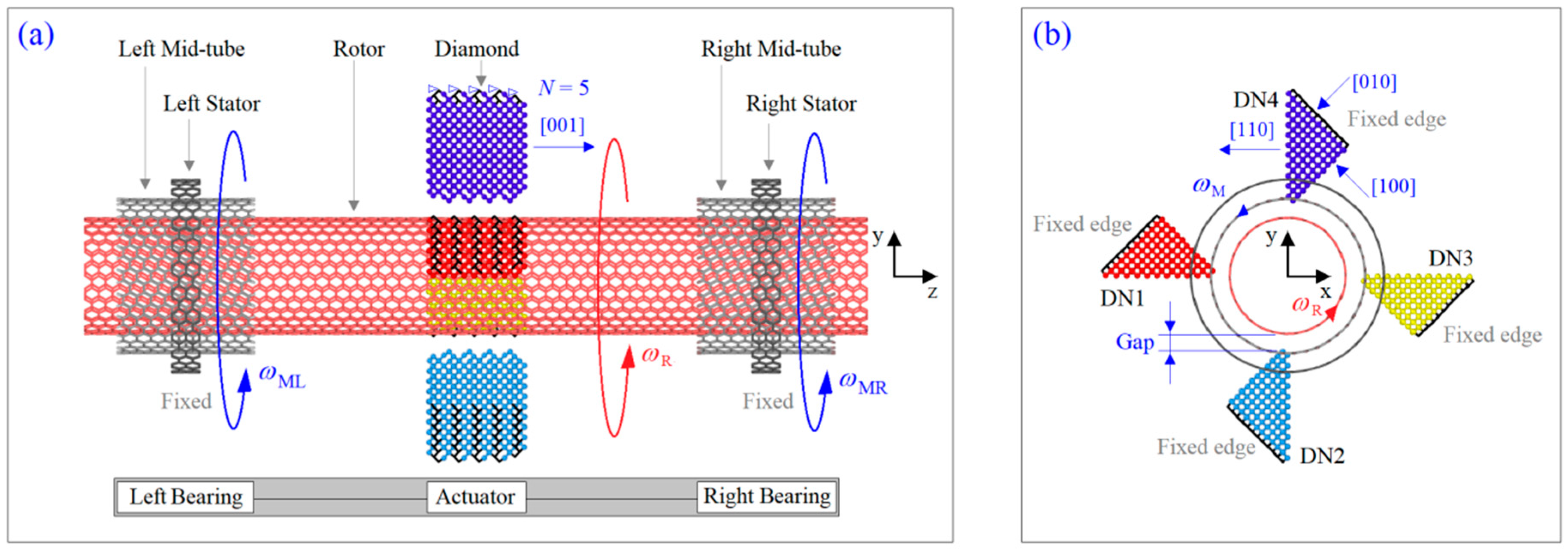
3.1. Model of a Rotary Nanomotor
3.2. Methodology
3.3. Mechanism of Rotation
4. Conclusions
- (1)
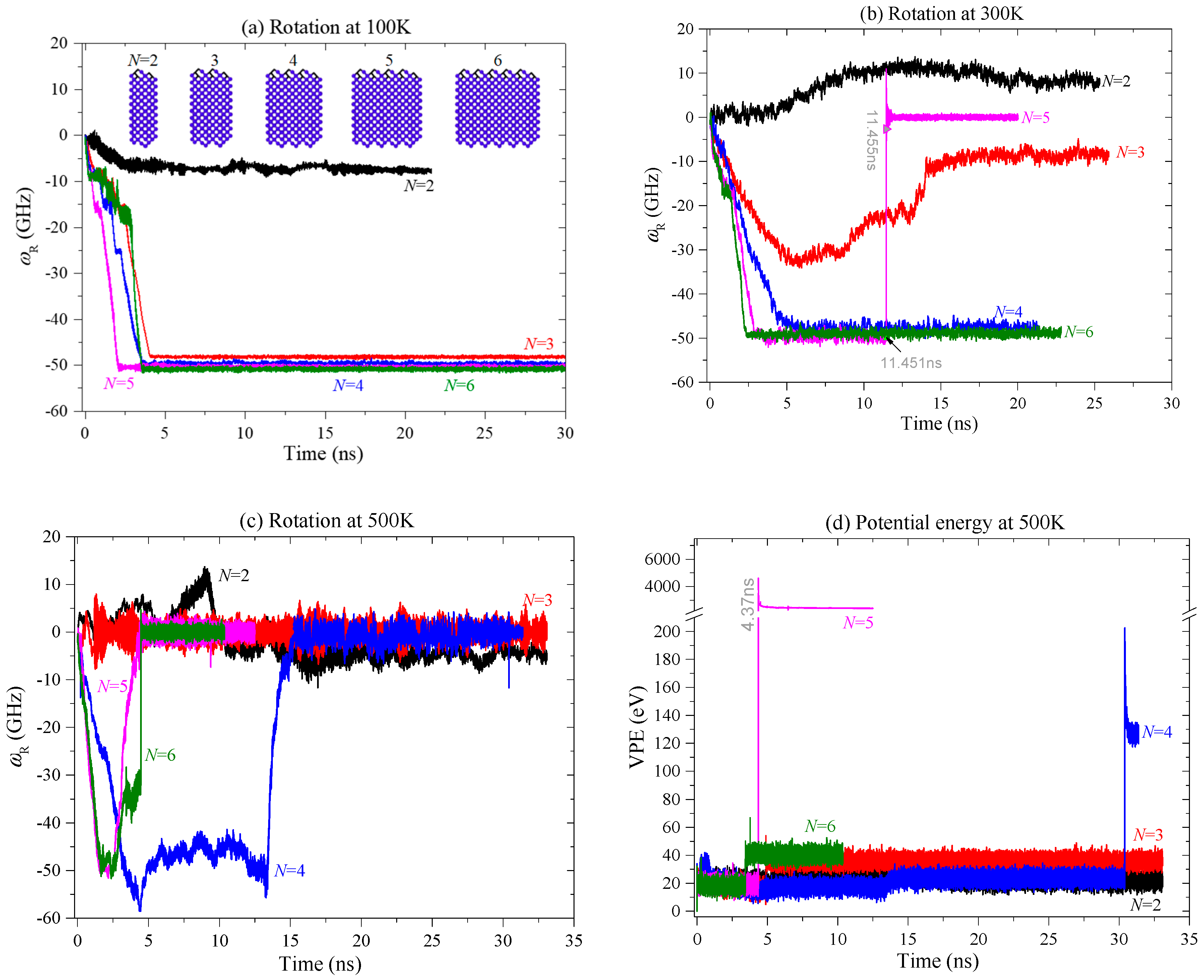
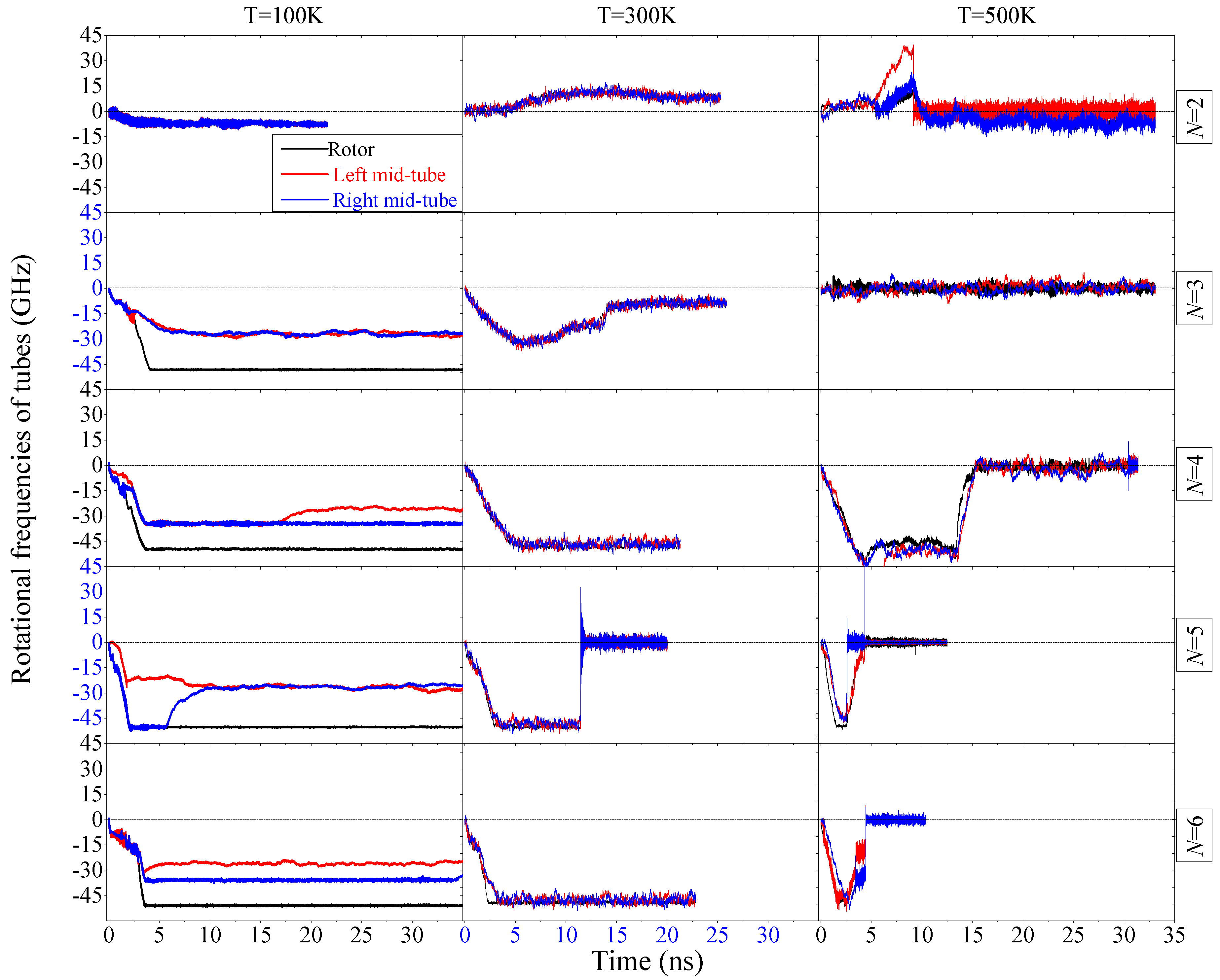
- At 100 K, the rotor had a more stable rotational frequency (SRF) when it was driven by thicker diamond needles. When N > 3, the values of SRF are slightly different.
- (2)
- When the rotor is driven by the diamond needles with N = 2, its rotational direction at 100 K is opposite that of 300 K. The reason is that the C-C bonds at the tips of the wedged diamond had a high rotational angle at 300 K. The deformed diamond tips provide reverse repulsion for the rotor to rotate.
- (3)
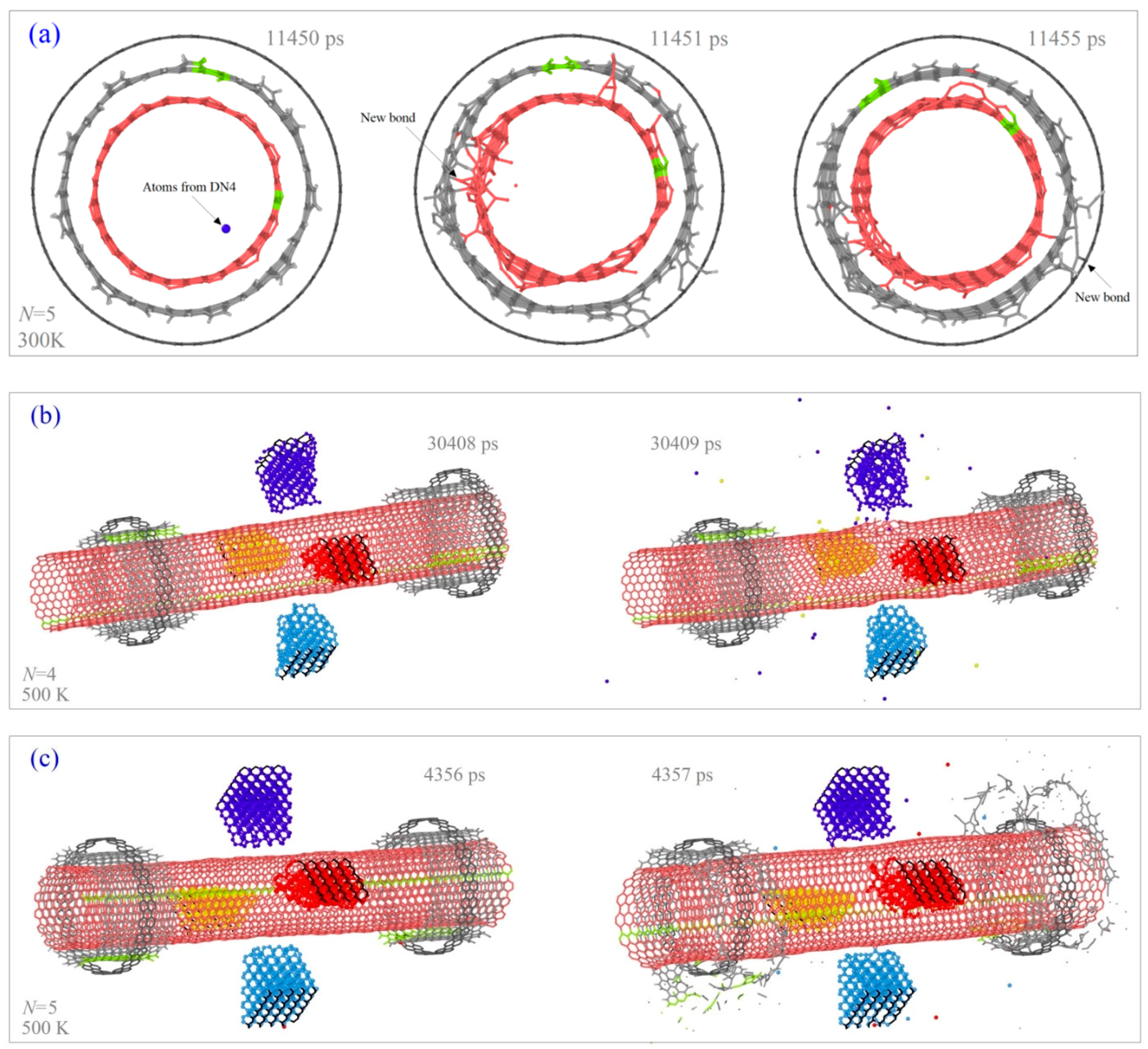
- At 300 K or a higher temperature, the rotating rotor may stop suddenly. In particular, at 500 K, the rotor cannot reach a stable rotation before stopping. Interrupt of the high-speed stable rotation of the rotor was mainly caused by the intrusion of one or more atoms which escaped from broken diamond needles.
- (4)
- At 100 K, the two mid-tubes may have different rotational frequency from that of the rotor. It is caused by the edges of tubes having stronger interaction when they stayed close to each other. At 300 K, the two mid-tubes rotated approximately synchronously with the rotor. If the rotor stopped suddenly, the two mid-tubes stopped simultaneously.
- (5)
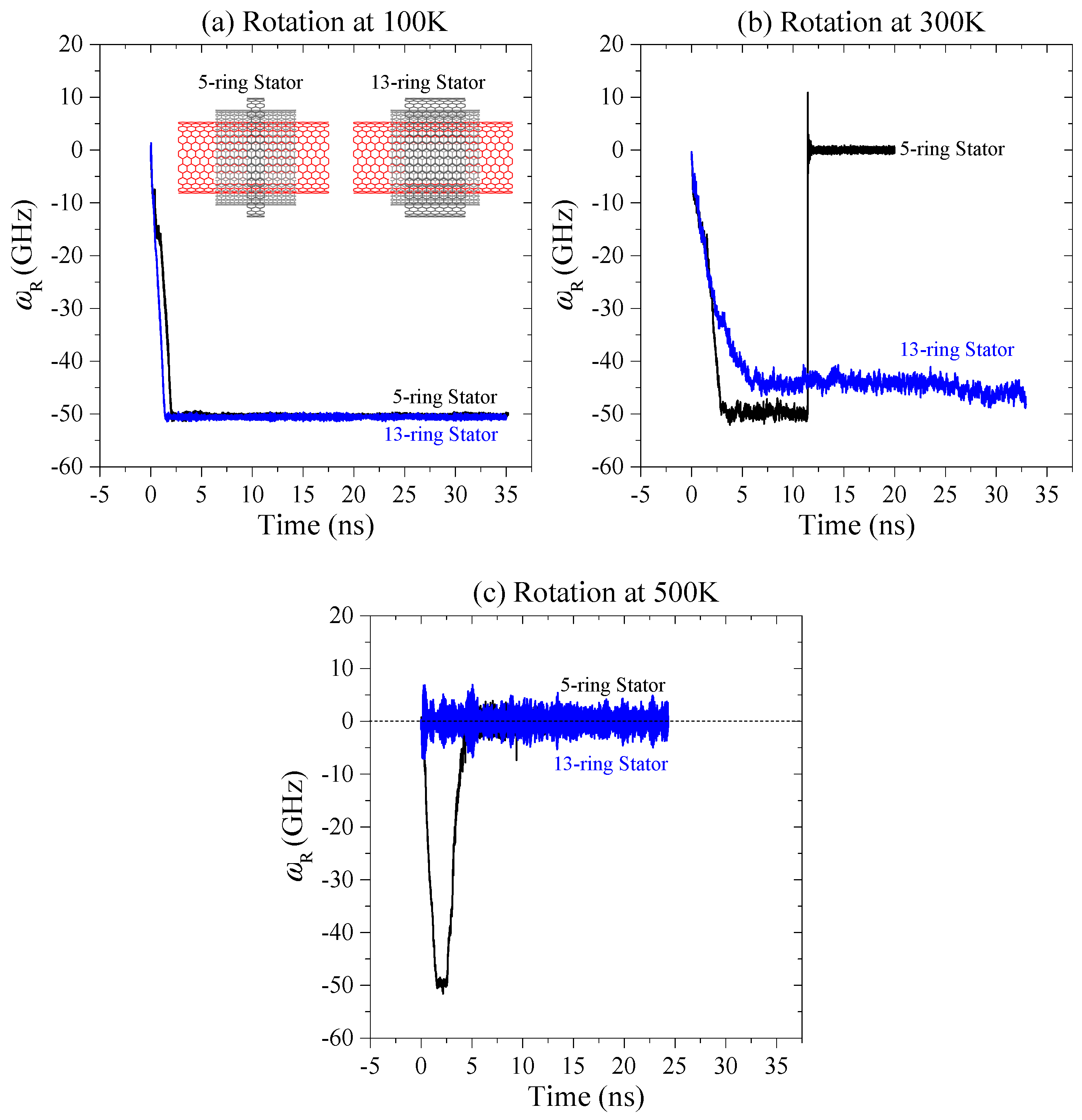
- Using thicker stators to constrain the mid-tubes at room temperature, the stability of rotor rotation can be improved.
Author Contributions
Funding
Conflicts of Interest
References
- Iijima, S. Helical microtubules of graphitic carbon. Nature 1991, 354, 56–58. [Google Scholar] [CrossRef]
- Zheng, Q.; Jiang, Q. Multiwalled carbon nanotubes as gigahertz oscillators. Phys. Rev. Lett. 2002, 88, 045503. [Google Scholar] [CrossRef] [PubMed]
- Guo, W.; Guo, Y.; Gao, H.; Zheng, Q.; Zhong, W. Energy dissipation in gigahertz oscillators from multiwalled carbon nanotubes. Phys. Rev. Lett. 2003, 91, 125501. [Google Scholar] [CrossRef] [PubMed]
- Qin, Z.; Qin, Q.H.; Feng, X.Q. Mechanical property of carbon nanotubes with intramolecular junctions: Molecular dynamics simulations. Phys. Lett. A 2008, 372, 6661–6666. [Google Scholar] [CrossRef]
- Legoas, S.; Coluci, V.; Braga, S.; Coura, P.; Dantas, S.; Galvao, D. Molecular-dynamics simulations of carbon nanotubes as gigahertz oscillators. Phys. Rev. Lett. 2003, 90, 055504. [Google Scholar] [CrossRef] [PubMed]
- Kaun, C.-C.; Seideman, T. Current-driven oscillations and time-dependent transport in nanojunctions. Phys. Rev. Lett. 2005, 94, 226801. [Google Scholar] [CrossRef] [PubMed]
- Cai, K.; Yin, H.; Qin, Q.H.; Li, Y. Self-excited oscillation of rotating double-walled carbon nanotubes. Nano Lett. 2014, 14, 2558–2562. [Google Scholar] [CrossRef] [PubMed]
- Peng, H.; Chang, C.; Aloni, S.; Yuzvinsky, T.; Zettl, A. Ultrahigh frequency nanotube resonators. Phys. Rev. Lett. 2006, 97, 087203. [Google Scholar] [CrossRef] [PubMed]
- Tavernarakis, A.; Stavrinadis, A.; Nowak, A.; Tsioutsios, I.; Bachtold, A.; Verlot, P. Optomechanics with a hybrid carbon nanotube resonator. Nat. Commun. 2018, 9, 662. [Google Scholar] [CrossRef] [PubMed]
- Laird, E.A.; Pei, F.; Tang, W.; Steele, G.A.; Kouwenhoven, L.P. A high quality factor carbon nanotube mechanical resonator at 39 GHz. Nano Lett. 2011, 12, 193–197. [Google Scholar] [CrossRef] [PubMed]
- Cumings, J.; Zettl, A. Low-friction nanoscale linear bearing realized from multiwall carbon nanotubes. Science 2000, 289, 602–604. [Google Scholar] [CrossRef] [PubMed]
- Bourlon, B.; Glattli, D.C.; Miko, C.; Forró, L.; Bachtold, A. Carbon nanotube based bearing for rotational motions. Nano Lett. 2004, 4, 709–712. [Google Scholar] [CrossRef]
- Yin, H.; Cai, K.; Wei, N.; Qin, Q.H.; Shi, J. Study on the dynamics responses of a transmission system made from carbon nanotubes. J. Appl. Phys. 2015, 117, 234305. [Google Scholar] [CrossRef]
- Qiu, W.; Li, Q.; Lei, Z.K.; Qin, Q.H.; Deng, W.L. The use of a carbon nanotube sensor for measuring strain by micro-raman spectroscopy. Carbon 2013, 53, 161–168. [Google Scholar] [CrossRef]
- Qiu, W.; Kang, Y.L.; Lei, Z.K.; Qin, Q.H.; Li, Q. A new theoretical model of a carbon nanotube strain sensor. Chin. Phys. Lett. 2009, 26, 080701. [Google Scholar]
- Fennimore, A.; Yuzvinsky, T.; Han, W.-Q.; Fuhrer, M.; Cumings, J.; Zettl, A. Rotational actuators based on carbon nanotubes. Nature 2003, 424, 408–410. [Google Scholar] [CrossRef] [PubMed]
- Kang, J.W.; Hwang, H.J. Nanoscale carbon nanotube motor schematics and simulations for micro-electro-mechanical machines. Nanotechnology 2004, 15, 1633–1638. [Google Scholar] [CrossRef]
- Tu, Z.; Hu, X. Molecular motor constructed from a double-walled carbon nanotube driven by axially varying voltage. Phys. Rev. B 2005, 72, 033404. [Google Scholar] [CrossRef]
- Barreiro, A.; Rurali, R.; Hernandez, E.R.; Moser, J.; Pichler, T.; Forro, L.; Bachtold, A. Subnanometer motion of cargoes driven by thermal gradients along carbon nanotubes. Science 2008, 320, 775–778. [Google Scholar] [CrossRef] [PubMed]
- Wang, B.; Vuković, L.; Král, P. Nanoscale rotary motors driven by electron tunneling. Phys. Rev. Lett. 2008, 101, 186808. [Google Scholar] [CrossRef] [PubMed]
- Prokop, A.; Vacek, J.; Michl, J. Friction in carborane-based molecular rotors driven by gas flow or electric field: Classical molecular dynamics. Acs Nano 2012, 6, 1901–1914. [Google Scholar] [CrossRef] [PubMed]
- Cai, K.; Li, Y.; Qin, Q.H.; Yin, H. Gradientless temperature-driven rotating motor from a double-walled carbon nanotube. Nanotechnology 2014, 25, 505701. [Google Scholar] [CrossRef] [PubMed]
- Qian, D.; Wagner, G.J.; Liu, W.K.; Yu, M.-F.; Ruoff, R.S. Mechanics of carbon nanotubes. Appl. Mech. Rev. 2002, 55, 495–533. [Google Scholar] [CrossRef]
- Zhang, R.; Ning, Z.; Zhang, Y.; Zheng, Q.; Chen, Q.; Xie, H.; Zhang, Q.; Qian, W.; Wei, F. Superlubricity in centimetres-long double-walled carbon nanotubes under ambient conditions. Nat. Nanotechnol. 2013, 8, 912–916. [Google Scholar] [CrossRef] [PubMed]
- Cook, E.H.; Buehler, M.J.; Spakovszky, Z.S. Mechanism of friction in rotating carbon nanotube bearings. J. Mech. Phys. Solids 2013, 61, 652–673. [Google Scholar] [CrossRef]
- Zhu, C.; Guo, W.; Yu, T. Energy dissipation of high-speed nanobearings from double-walled carbon nanotubes. Nanotechnology 2008, 19, 465703. [Google Scholar] [CrossRef] [PubMed]
- Cai, K.; Wan, J.; Qin, Q.H.; Shi, J. Quantitative control of a rotary carbon nanotube motor under temperature stimulus. Nanotechnology 2016, 27, 055706. [Google Scholar] [CrossRef] [PubMed]
- Cai, K.; Cai, H.; Ren, L.; Shi, J.; Qin, Q.H. Over-speeding rotational transmission of a carbon nanotube-based bearing. J. Phys. Chem. C 2016, 120, 5797–5803. [Google Scholar] [CrossRef]
- Guo, Z.; Chang, T.; Guo, X.; Gao, H. Thermal-induced edge barriers and forces in interlayer interaction of concentric carbon nanotubes. Phys. Rev. Lett. 2011, 107, 105502. [Google Scholar] [CrossRef] [PubMed]
- Popov, A.M.; Lebedeva, I.V.; Knizhnik, A.A.; Lozovik, Y.E.; Potapkin, B.V. Ab initio study of edge effect on relative motion of walls in carbon nanotubes. J. Chem. Phys. 2013, 138, 024703. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.-N.; Cai, K.; Shi, J.; Qin, Q.-H. Friction effect of stator in a multi-walled cnt-based rotation transmission system. Nanotechnology 2017, 29, 045706. [Google Scholar] [CrossRef] [PubMed]
- Plimpton, S. Fast parallel algorithms for short-range molecular dynamics. J. Comp. Phys. 1995, 117, 1–19. [Google Scholar] [CrossRef]
- LAMMPS. Molecular Dynamics Simulator. Available online: http://lammps.sandia.gov/ (accessed on 5 March 2017).
- Hoover, W.G. Canonical dynamics: Equilibrium phase-space distributions. Phys. Rev. A 1985, 31, 1695. [Google Scholar] [CrossRef]
- Stuart, S.J.; Tutein, A.B.; Harrison, J.A. A reactive potential for hydrocarbons with intermolecular interactions. J. Chem. Phys. 2000, 112, 6472–6486. [Google Scholar] [CrossRef]
- Jones, J.E. On the determination of molecular fields. Ii. From the equation of state of a gas. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 1924, 106, 463–477. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SRF | 100 K | 300 K | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| N = 2 | N = 3 | N = 4 | N = 5 | N = 6 | N = 2 | N = 3 | N = 4 | N = 5 | N = 6 | |
| ωR/GHz | −7.18 | −48.19 | −49.64 | −50.25 | −50.85 | 8.16 | −8.57 | −47.67 | 0 | −48.90 |
| ωML/GHz | −7.18 | −26.80 | −25.73 | −26.64 | −25.94 | 7.85 | −8.69 | −46.38 | 0 | −47.26 |
| ωMR/GHz | −7.19 | −26.68 | −34.46 | −26.29 | −35.71 | 8.01 | −8.48 | −46.82 | 0 | −47.66 |
| ratio1 | 1.000 | 0.556 | 0.518 | 0.530 | 0.510 | 0.962 | 1.014 | 0.973 | 1.00 | 0.966 |
| ratio2 | 1.001 | 0.554 | 0.694 | 0.523 | 0.702 | 0.982 | 0.989 | 0.982 | 1.00 | 0.975 |
| Component | (n, m) | Radius/nm | Length/nm | Ring/Layer Number | Number of Atoms | z-Distance/nm |
|---|---|---|---|---|---|---|
| Rotor | (15, 15) | 1.017 | 13.7733 | 113 | 3390 | / |
| Mid-tube | (20, 20) | 1.356 | 2.2136 | 19 | 1420C + 80H | Between both mid-tubes: 8.0 |
| Stator | (25, 25) | 1.695 | 0.4919/1.4759 | 5/13 | 250/650 | Between both stators: 9.7216/8.7376 |
| Diamond | [001]//z | [1−10]//r | [100] edge = 1.358 | N = 2/3/4/5/6 | 680/1036/1392/1748/2104 | Between a tip and the rotor: gap = 0.3 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Wang, A.; Shi, J.; Liu, Y.; Cheng, G. Diamond Needles Actuating Triple-Walled Carbon Nanotube to Rotate via Thermal Vibration-Induced Collision. Int. J. Mol. Sci. 2019, 20, 1140. https://doi.org/10.3390/ijms20051140
Li H, Wang A, Shi J, Liu Y, Cheng G. Diamond Needles Actuating Triple-Walled Carbon Nanotube to Rotate via Thermal Vibration-Induced Collision. International Journal of Molecular Sciences. 2019; 20(5):1140. https://doi.org/10.3390/ijms20051140
Chicago/Turabian StyleLi, Hui, Aiqin Wang, Jiao Shi, Yongjian Liu, and Gao Cheng. 2019. "Diamond Needles Actuating Triple-Walled Carbon Nanotube to Rotate via Thermal Vibration-Induced Collision" International Journal of Molecular Sciences 20, no. 5: 1140. https://doi.org/10.3390/ijms20051140
APA StyleLi, H., Wang, A., Shi, J., Liu, Y., & Cheng, G. (2019). Diamond Needles Actuating Triple-Walled Carbon Nanotube to Rotate via Thermal Vibration-Induced Collision. International Journal of Molecular Sciences, 20(5), 1140. https://doi.org/10.3390/ijms20051140