1. Introduction
In 2019, 374 billion ton-kilometers of goods were transported in the French metropolitan territory (including 11.8 billion by pipelines), a growth of 2.5% compared to 2018 [
1]. These statistics show and highlight the importance of freight transport. However, it negatively influences the three main sustainability levels by increasing the logistics costs, the CO
2 emissions, the depletion of nonrenewable resources, and the degradation of human life. Therefore, improving the effectiveness of the logistics operations by optimizing the distribution networks has been proved to be the best solution to face the companies’ difficulties. This effectiveness cannot be attained only by collaboration between companies. This strategy is the cornerstone of managing an efficient supply chain. It reduces, on the one hand, greenhouse gases, pollution, and congestion and, on the other hand, costs. In addition, it allows the agility and resilience of a company [
2]. According to Aloui et al. [
3], collaboration can be vertical (VC), horizontal (HC), and lateral. The VC is defined as a commercial agreement between two partners or more, from different levels of the network, in order to work together to take advantage of cooperation [
4]. These partners (e.g., suppliers and clients) share important information about demands, deliveries, capacity, etc. However, the HC is based on sharing logistical resources between competitive partners who are at the same level of the network, but they belong to different logistics chains [
5]. This type of collaboration improves the sustainability aspects through the reduction in logistics costs and CO
2 emissions and the enhancement of the well-being of citizens and inhabitants, etc. [
6,
7]. Finally, lateral collaboration can be considered as the combination of the two other types of collaboration. As stated in Pan et al. [
8], most studies deal with vertical collaboration, yet the results can be further enhanced through horizontal collaboration. Therefore, we are interested in the HC assuming that each partner applies a VC with its customers by sharing information. The problems covered by the HC can be classified according to the three levels of decision making: strategic, tactical, and operational [
9]. The strategic level purpose is to satisfy the market demands. It often concerns long-term decisions, and it is difficult to change [
10]. Among the strategic decisions, we can mention the design of distribution networks and the selection of partners [
11]. On the other hand, the tactical level concerns the decisions in the medium-term. These decisions make it possible to satisfy predictable demands at the lowest production cost. Generally, they treat problems related to resource management, especially the problem of planning activities and the modalities of movement of goods in the structure designed at the strategic level. As instances of these decisions, we may cite the vehicle routing problem and the problem of sharing costs and CO
2 emissions between partners [
12]. Finally, the operational level concerns decisions that ensure the management of the means, the daily operation, and the flexibility of the supply chain in the short-term (the choice of the delivery and transport schedule, the allocation of transport means to sites, route selection, etc.) [
13].
In this study, we are interested in the horizontal collaboration that improves the different sustainability levels. One of the main problems studied by the HC is the design of the collaborative distribution networks. Indeed, it is essential to address this problem by minimizing the impact of the different partners on the sustainability by reducing the logistics costs, CO2 emissions, accident rate and noise level, enhancing the filling rate, minimizing the travelled distances, etc.
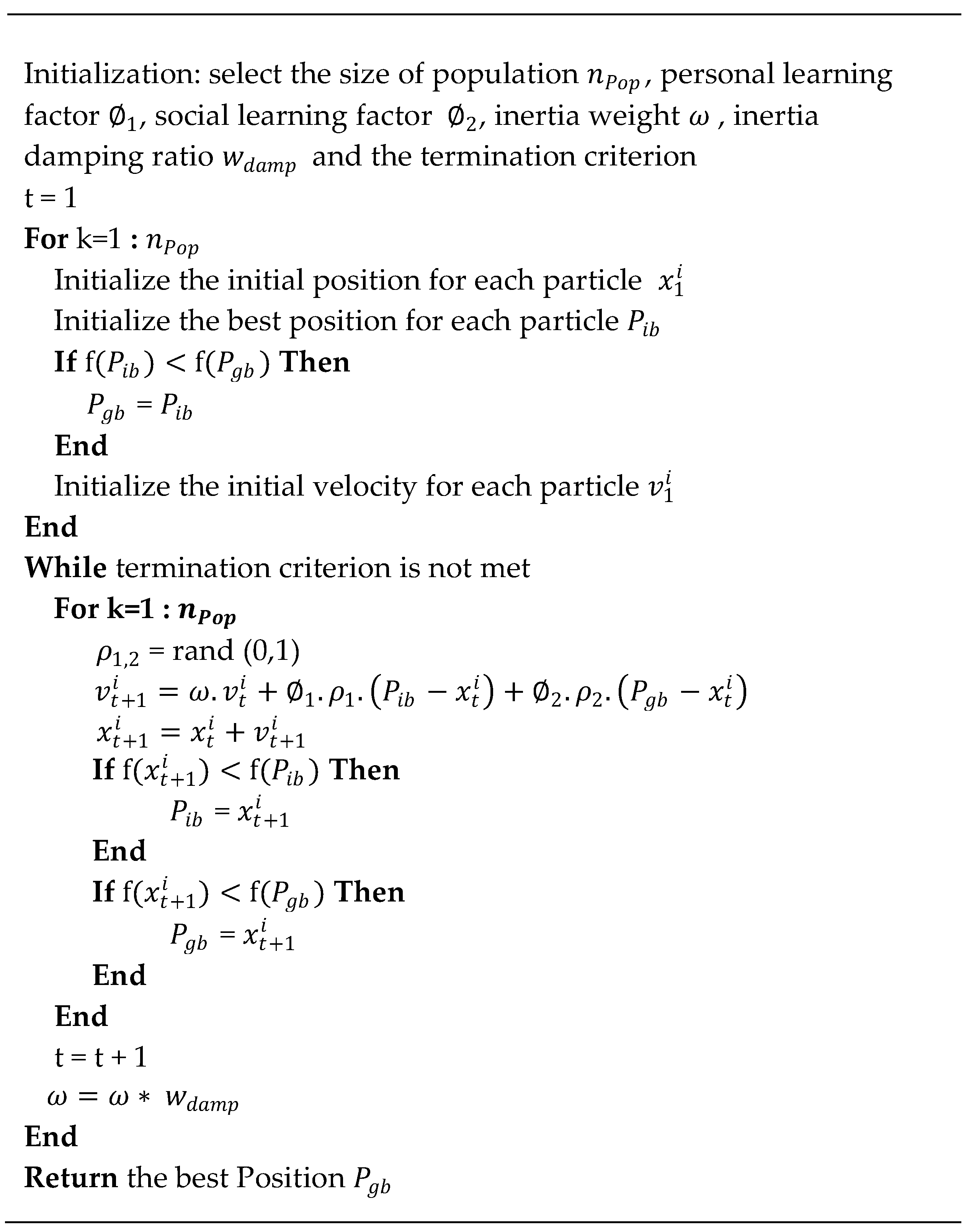
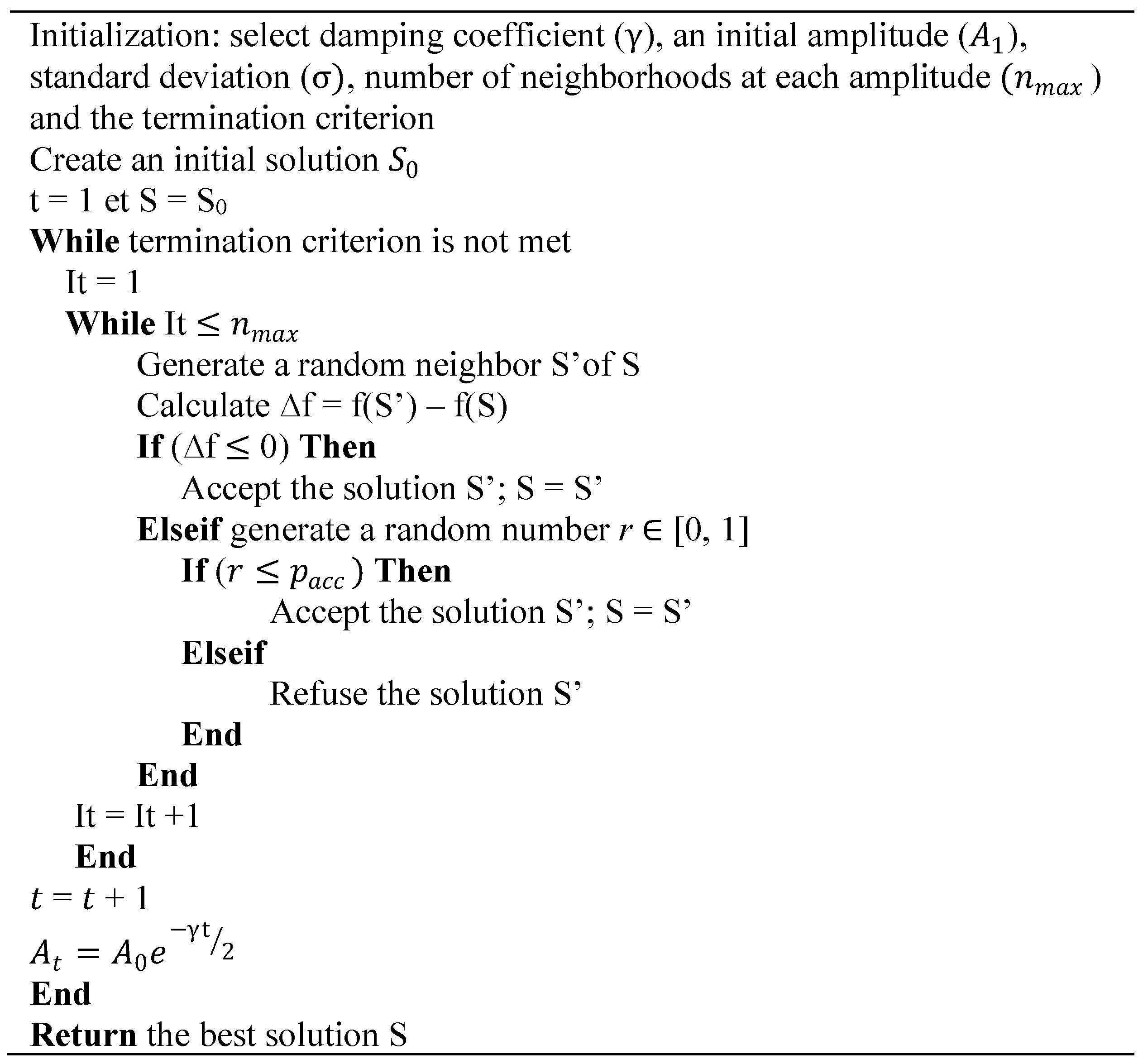
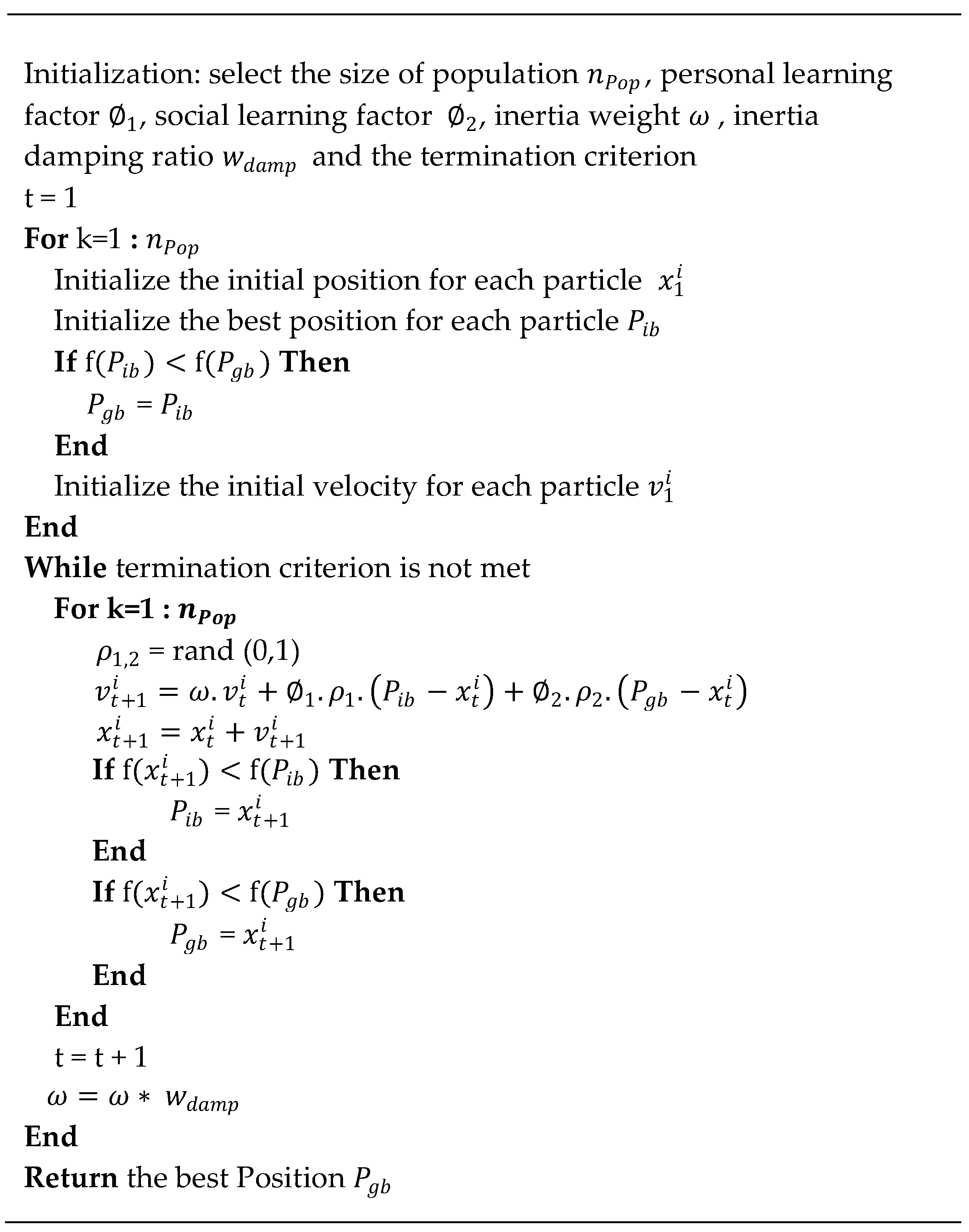
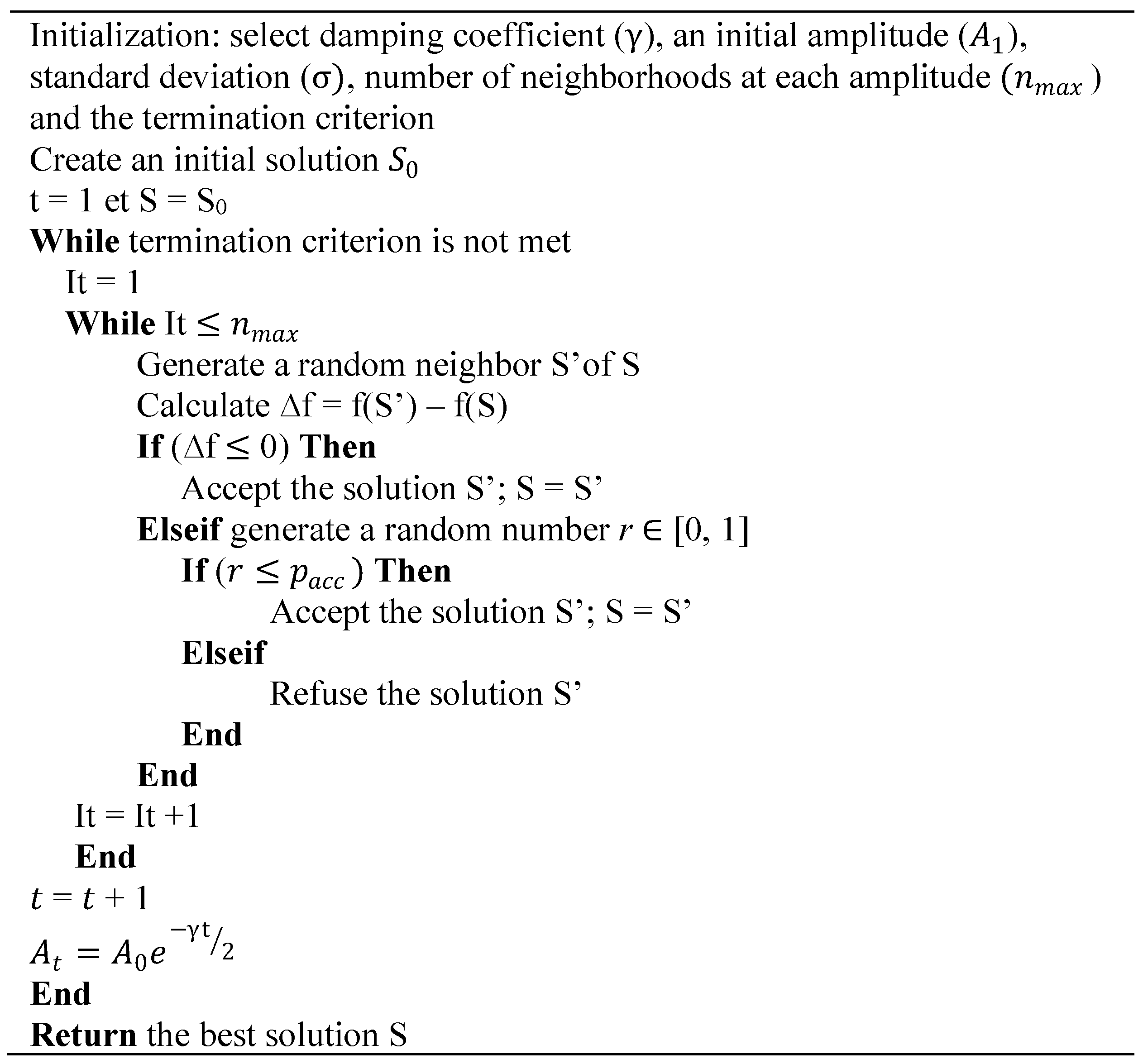
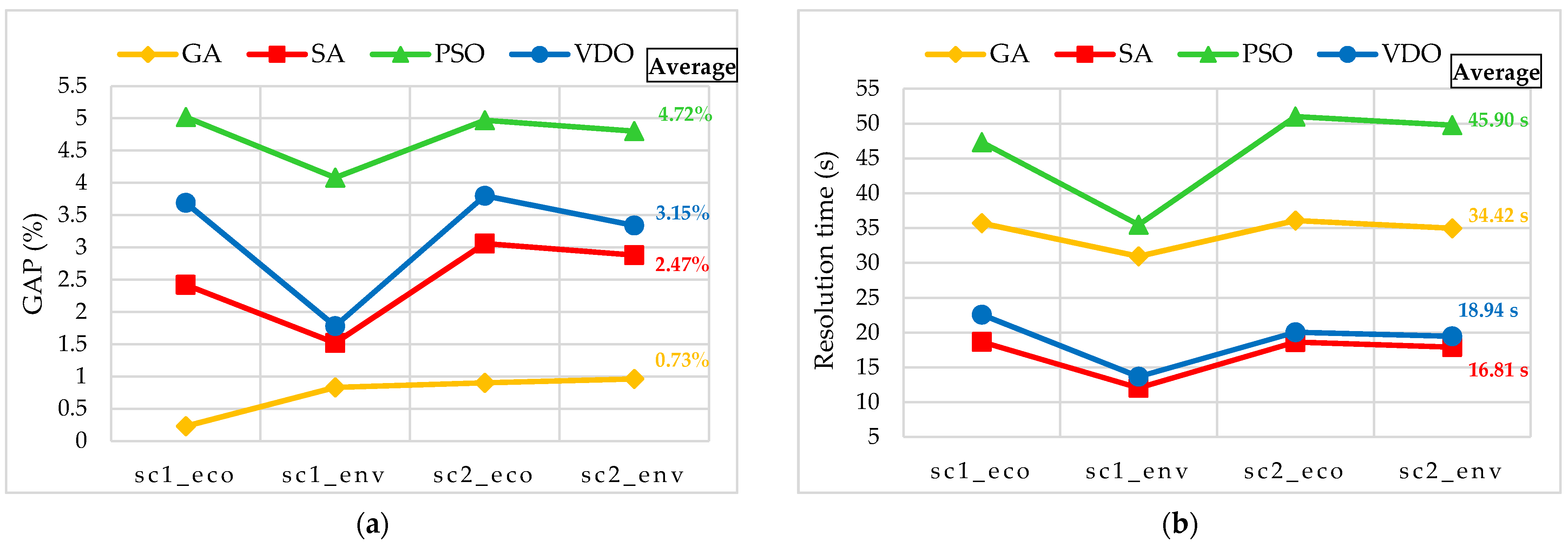
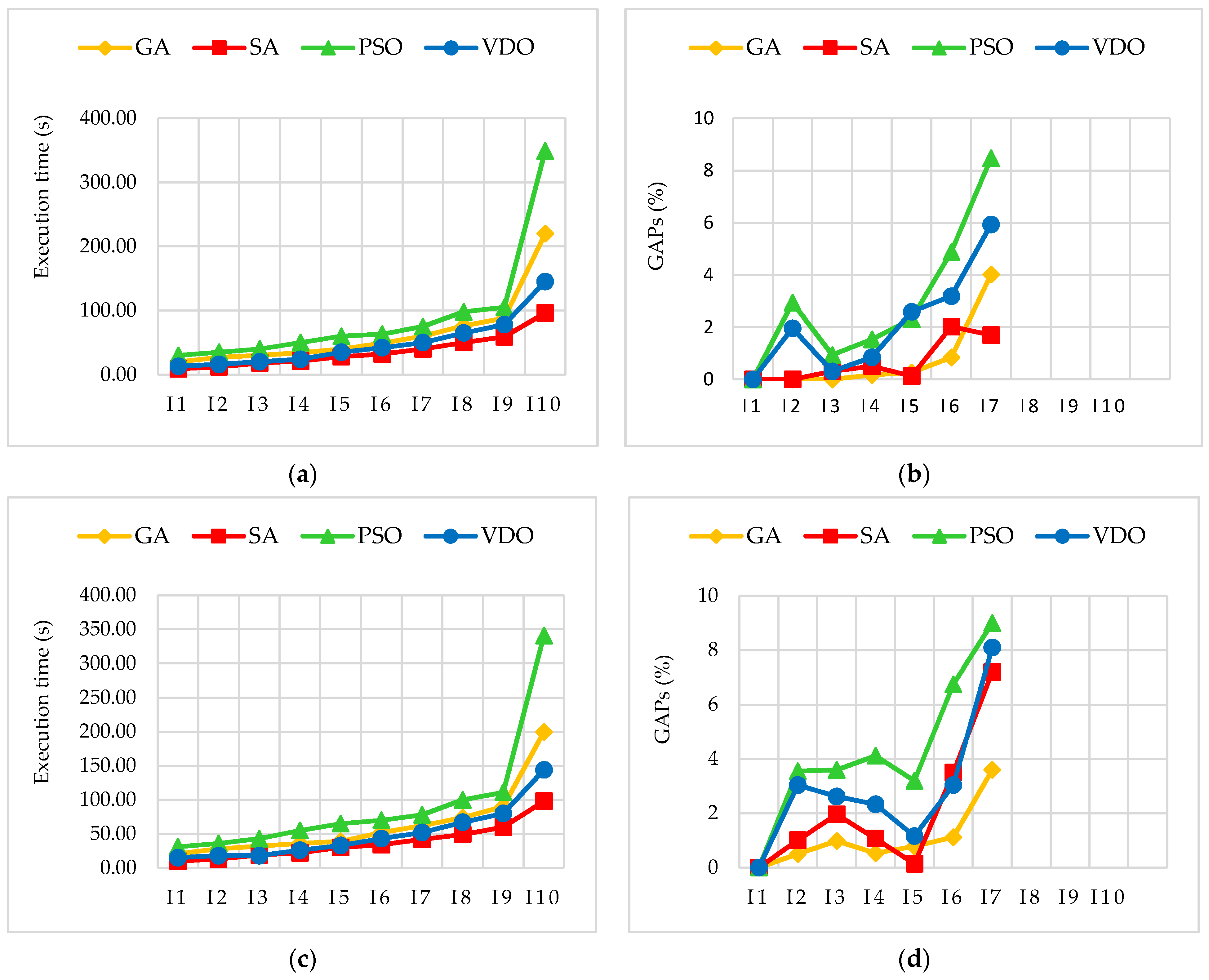
The main contributions of this paper are the following: We propose four metaheuristics to efficiently solve our distribution problem. A genetic algorithm (GA), a simulated annealing (SA), a particle swarm algorithm (PSO), and a vibration damping optimization (VDO) were introduced with an encoding adapted to our problem. In particular, the latter is NP-hard and its exact mathematical resolution is limited in terms of computing time. Thus, it is necessary to develop metaheuristic algorithms to find approximate solutions with a minimum gap in an acceptable resolution time. Moreover, we treated two different collaborative scenarios with different distribution policies. The parameters of our proposed algorithms were set via a typical experimental method. Furthermore, our objectives were to minimize the logistics costs or the CO2 emissions and evaluate the noise level and the accident risk. To assess the effectiveness of the introduced algorithms, the latter were tested on a fictitious distribution network. A sensitivity analysis was performed to explore the impact of the problem’s size on the results through extensive computational experiments that were performed on different instances to validate our proposals.
The remainder of the paper is organized as follows.
Section 2 presents a literature review about the resolution methods used in distribution networks.
Section 3 introduces the mathematical model, its description, and formulation.
Section 4 describes the proposed metaheuristics.
Section 5 reports the experimental results of the case study.
Section 6 presents the sensitivity analysis. Finally,
Section 7 provides the conclusion and future work.
2. Literature Review
The distribution network design problem (DNDP) objectives are: (i) to identify the optimal strategy (number and location of hubs), (ii) assign non-hub nodes (suppliers, customers, etc.) to hubs, and (iii) determine the links between hubs and logistics routes [
14]. According to O’Kelly [
15], the DNDP can be defined as a general hub location problem (HLP). Following the landmark studies of [
16,
17], HLP has been well studied in the literature [
18,
19,
20,
21]. Considering the cost or time in the objective function, the HLP can be divided into the hub median problem (HMP) and the hub center problem (HCP) (See [
22,
23]). Based on the type of allocation of non-hub nodes to hubs, we can distinguish two types of allocation. In the case where a non-hub node is assigned to multiple hubs, we talk about multiple allocation. However, when a non-hub node is allocated to a single hub, the allocation type will be single allocation. Mathematical models dealing with HLP are NP-hard and their exact resolution is limited in terms of computing time. Thus, it is necessary to develop heuristic algorithms to find approximate solutions with a minimal gap during an acceptable resolution time. For this reason, Rodríguez et al. [
24] developed a simulated annealing (SA) algorithm to study hub location problems with hubs’ capacity constraints (CSAHLP). The proposed SA algorithm provided better solutions and improved the level of service. In addition, Kratica et al. [
25] examined an uncapacitated single allocation p-hub location problem (USAp-HLP) with two evolutionary metaheuristics. Both genetic approaches were introduced to solve the problem using new coding schemes and modified genetic operators. The obtained results showed that the proposed approaches achieved all the optimal solutions, even for large-sized problems. However, Randall [
26] examined a CSAHLP. They implemented an ant colony optimization metaheuristic (ACO) to determine optimal solutions in a reasonable computing time. In addition, Ilić et al. [
27] studied an USAp-HLP with economic objectives. As the number of constraints and variables increased exponentially with the size of the problem, a general variable neighborhood search (GVNS) was employed to overcome the limitations of exact methods. The findings provided by the GVNS were compared with those obtained by other heuristics and the efficiency of this method in reducing the computational time was proven. Nonetheless, Stanimirović et al. [
28] presented a GA to address a capacitated single allocation p-hub location problem (CSAp-HLP). Binary coding of individuals and modified genetic operators were also used to solve the problem. Thus, the GA was proved to be effective in dealing with large-sized problems which cannot be solved with exact methods. On the other hand, Lin et al. [
29] studied a capacitated multiple allocation p-hub location problem (CMAp-HLP). They solved this problem applying a GA to overcome the limitations of the mathematical model. In return, Yang et al. [
30] proposed a hybrid algorithm to deal with an USAp-HLP. This algorithm (GA-LS), which incorporated the GA and local search (LS), showed better performance, compared to the classical version of the GA. The authors developed another hybrid algorithm (PSO-LS) where the PSO and the LS [
31] were combined. PSO-LS was more efficient than the PSO and the GA in terms of quality, solutions, and execution time. Similarly, Ghaderi and Rahmaniani [
32] proposed two hybrid metaheuristics based on PSO and VNS combined with the tabu search (TS) to solve the studied problem. Comparing the introduced solutions with those obtained with CPLEX, the two hybrid methods performed well, for all instances, in terms of computational efficiency and solution quality. In addition, two metaheuristics (SA and iterated local search (ILS)) were proposed by Fazel Zarandi et al. [
33] to reach optimal solutions in a more negligible computational time, compared to the exact resolution, and with a very high precision level. Moreover, Damgacioglu et al. [
34] studied an uncapacitated single allocation hub location problem (USAHLP). They introduced a GA to solve their mathematical model in a reasonable time. The GA showed better results than the location–allocation algorithm and discrete solutions but in longer resolution time. A mixed integer programming model and a VNS algorithm were developed by Serper and Alumur [
35] to examine a HLP with different types of vehicles. The VNS algorithm was able to find good quality solutions in a reasonable time. Furthermore, a mathematical formulation was introduced by Rabbani et al. [
36] to solve an USAp-HLP. Due to the nonlinear nature of the proposed model, the authors applied a GA to overcome the limitations of the model and solve large-sized problems in a reasonable time. On the other hand, a capacitated multiple allocation hub location problem (CMAHLP) was studied by Mirabi and Seddighi [
37] and a new hybrid algorithm based on ACO and SA was also proposed to solve this problem. The results of the mathematical model showed that the developed algorithm is efficient in solving the problem. Moreover, Neamatian Monemi et al. [
38] introduced a collaborative mathematical model for an HLP between two logistics service providers. This model was very difficult to be solved, even for very small instances. The authors introduced a mathematical solution algorithm integrating lagrangian relaxation (LR) into a LS algorithm that could be used to obtain good and acceptable solutions. Nevertheless, Ghaffarinasab et al. [
39] addressed the same problem but with the two allocation strategies (single and multiple). Mathematical formulations and algorithms based on SA were developed in order to study the related problem. Moreover, Bashiri et al. [
40] presented a mathematical model to deal with multiperiodic HLP in a dynamic environment. The authors developed a GA with an LS method and a SA algorithm. They found that the GA was more efficient than the SA in dealing with real-world applications where demand is changing rapidly. Moreover, a mathematical model was proposed by Lüer-Villagra et al. [
41] for an USAp-HLP. This model was difficult to solve, even for small instances. To overcome this weakness, the authors generated a GA that effectively and quickly solved the problem. At the same time, Özgün-Kibiroğlu et al. [
42] suggested a mixed integer nonlinear programming (MINLP) formulation to solve an uncapacitated multiple allocation hub location problem (UMAHLP) using a PSO algorithm, which was applied to effectively solve the model. In addition, a HLP was studied by Shang et al. [
43] with a stochastic programming model formulated in MILP to minimize distribution and opening costs. Due to the complexity of the computation, a memetic algorithm (MA) was introduced to solve the considered problem. This algorithm combined genetic research and LS to find optimal solutions within a reasonable computational time. Under these conditions, comparative results proved that the MA was more efficient than the GA in terms of the quality of solution and the speed of calculation. The same problem was addressed by Shang et al. [
44] using a robust optimization model that enabled the attainment of economic goals. The authors proposed a VNS algorithm and a heuristic based on the population-and-searching (PAS) to find the optimal solutions. The obtained findings showed that the PAS algorithm was the most efficient in dealing with large instances, compared to the CPLEX software and the VNS algorithm. In addition, a GA was introduced by Wang et al. [
45] to select the optimal hub locations and to ensure that the total network cost was minimized and products are delivered on time. The results demonstrated that the proposed algorithm could reduce the total cost and improve the efficiency of the network. The reviewed studies are summarized in
Table 1.
From this table, we can see that, in most of the studies dealing with HLP, the objective function of the proposed metaheuristics was to minimize logistics costs (transportation, storage, opening, etc.). However, none of these research works considered the three sustainability levels when designing the distribution networks and not all introduced models were flexible in terms of the delivery time. For these reasons, we present, in this study, a model that addresses the economic level or the environmental level and evaluates the social/societal level. On the other hand, the platforms’ capacities, in most of the existing studies, were predefined, which led to a predefined opening cost that did not depend on the warehouse area. Thus, it would be more optimal to consider the capacity of each hub as a decision variable determined by the model depending on the quantity of goods entering each warehouse. In addition, as demonstrated in most studies, a homogeneous fleet of vehicles represents a weakness due to the variability of demand that requires a flexible (heterogeneous) fleet with variable types of vehicles to ensure the customer’s satisfaction. In this study, we use a heterogeneous fleet of vehicles that enabled modelling of the economy of scale. As stated in [
35], the main reason for employing different types of vehicles in distribution networks is to achieve economies of scale and reduce the unit transportation cost by using larger-capacity vehicles. Therefore, we introduce, in this paper, meta-heuristic algorithms, namely a GA, a SA, a PSO and a VDO, to effectively solve the studied problem. The GA and the PSO were based on the population generation, which gives a larger research space. Moreover, the SA and the VDO are single solution algorithms and they offer low execution time.
3. Description and Formulation of the Problem
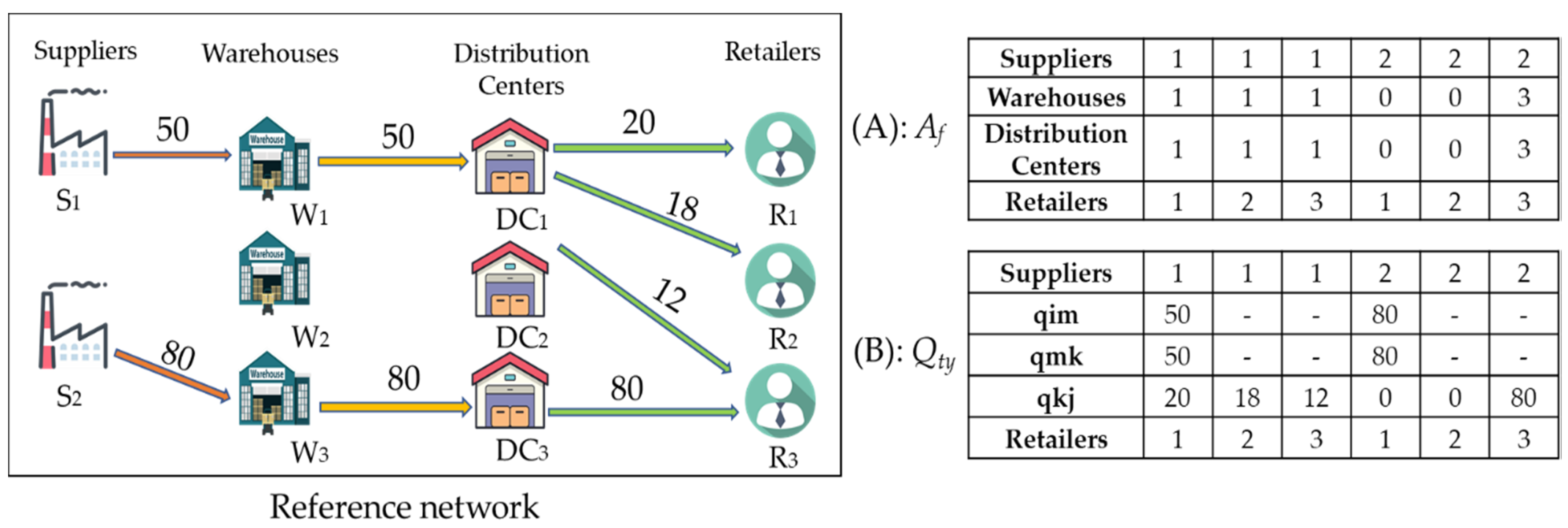
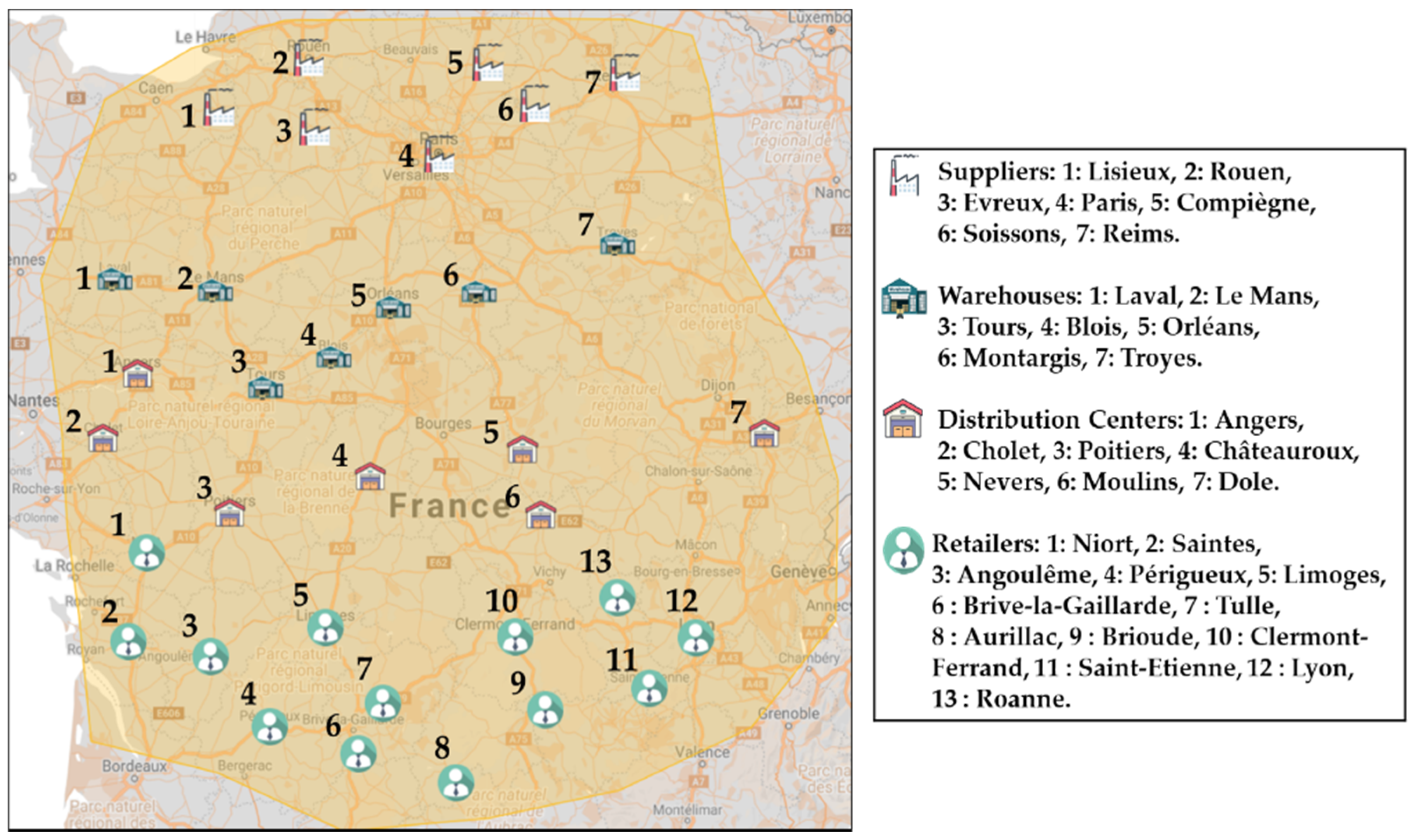
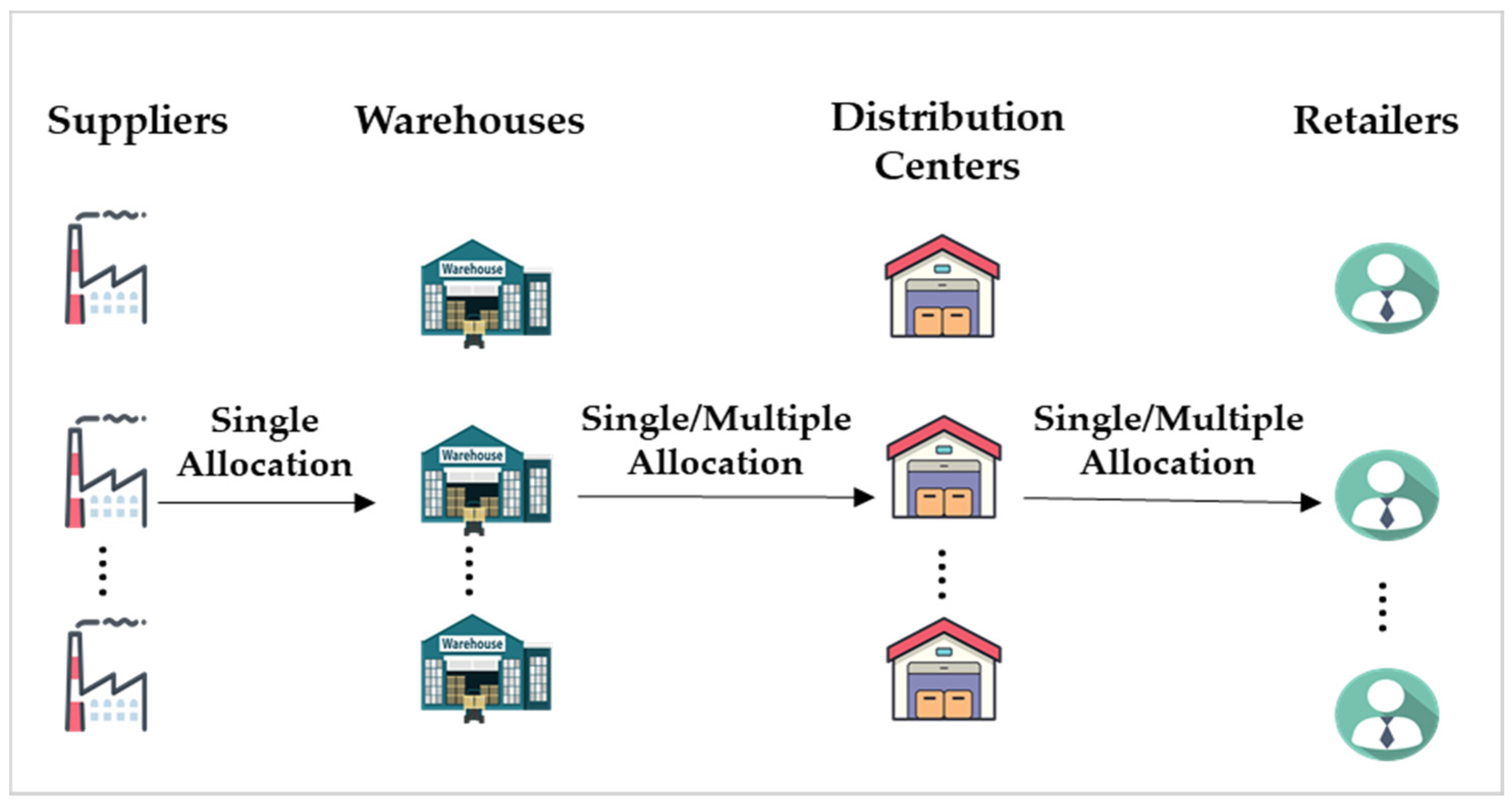
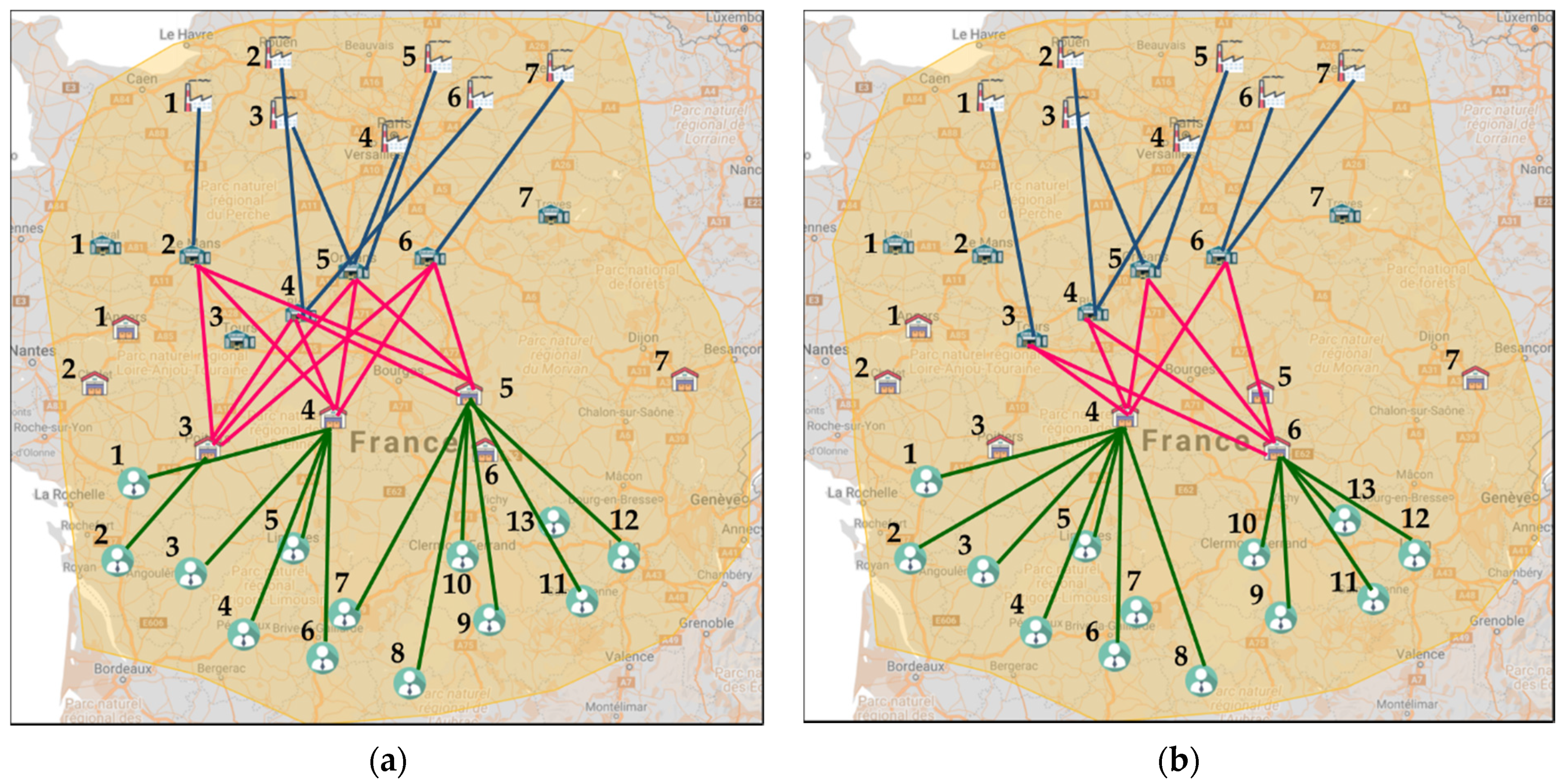
In this section, we examine a collaborative distribution network design problem that addresses three levels of sustainability. The targeted distribution network, shown in
Figure 1, contains suppliers who collaborate to deliver multiple products to retailers through the shared warehouses and distribution centers. The distribution of these products is carried out in a multiperiodic way and with several types of vehicles, which makes the vehicle fleet heterogeneous. The problem is similar to the CS/MAp-HLP (capacitated single/multiple allocation p-hub location problem), which is solved in the strategic decision context. The problem has two main objectives. The first is to determine the number and locations of the two types of hubs (warehouses and distribution centers). On the other hand, the second aim consists in assigning suppliers and distribution centers to warehouses and retailers to distribution centers. Moreover, the mathematical model determines the capacities of hubs, which are limited and depend on the quantities of goods entering each hub, the quantities delivered in each period in the three parts of the network (upstream, intermediate and downstream), the level of stocks in the warehouses, the delayed quantities, and the number and type of the used vehicles. As the upstream hubs are supposed to have storage times, their role is to store goods. On the other hand, downstream hubs are like cross-docking platforms in the sense that they have no storage time. The main functions of these platforms are to sort goods and distribute them to retailers.
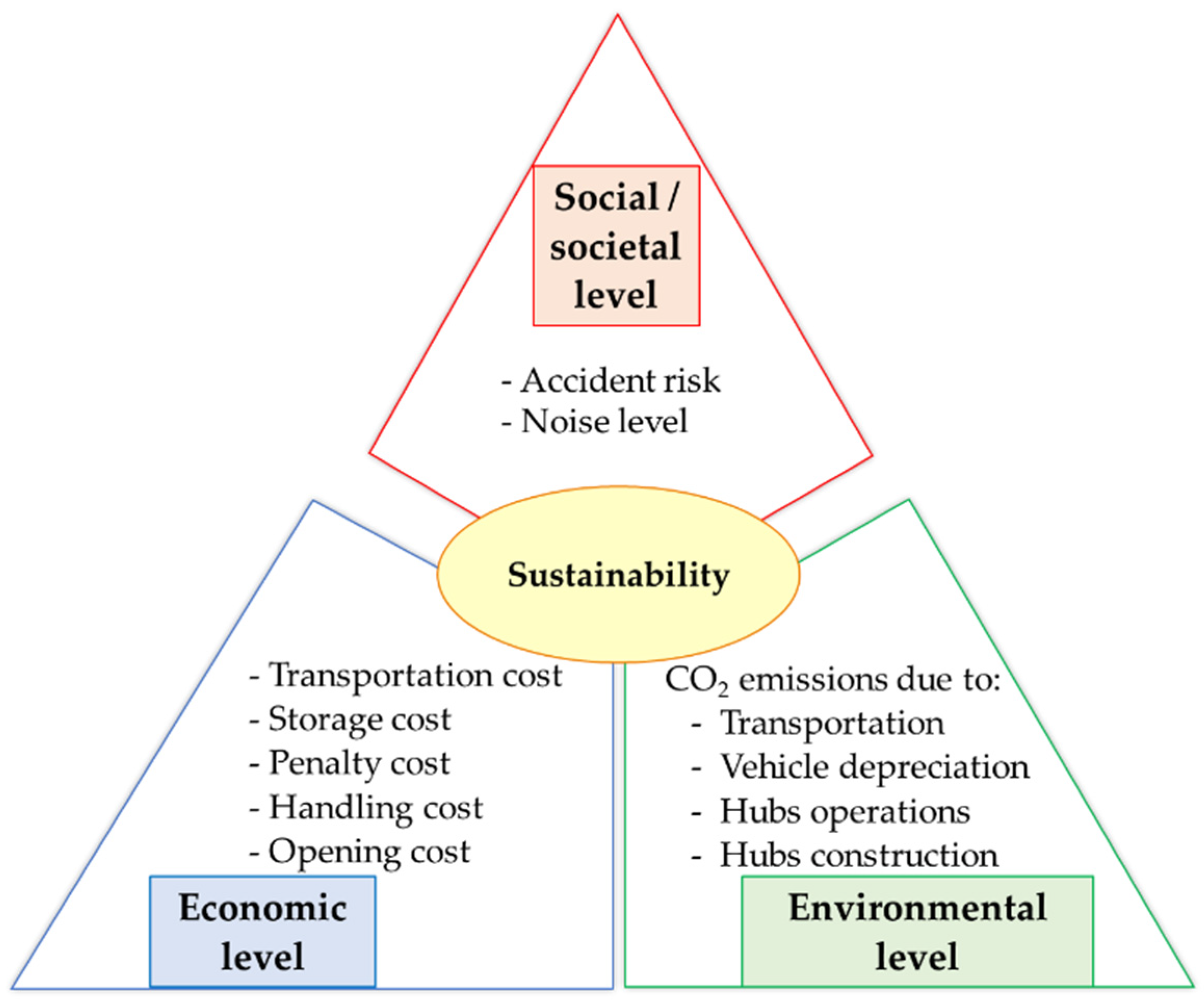
Today, sustainability has become one of the most important challenges. Therefore, collaboration is one of the solutions that has proven its efficiency in achieving the main goals of sustainability. It allows partners to benefit from certain advantages that contribute to a green and sustainable distribution network by ensuring the massification of flows, grouping together goods, and sharing resources and means. The three levels of sustainability are assessed, in this study, by minimizing the logistics costs or the CO
2 emissions and evaluating the noise levels and the risk of accidents. The evaluated sustainability indicators are shown in
Figure 2.
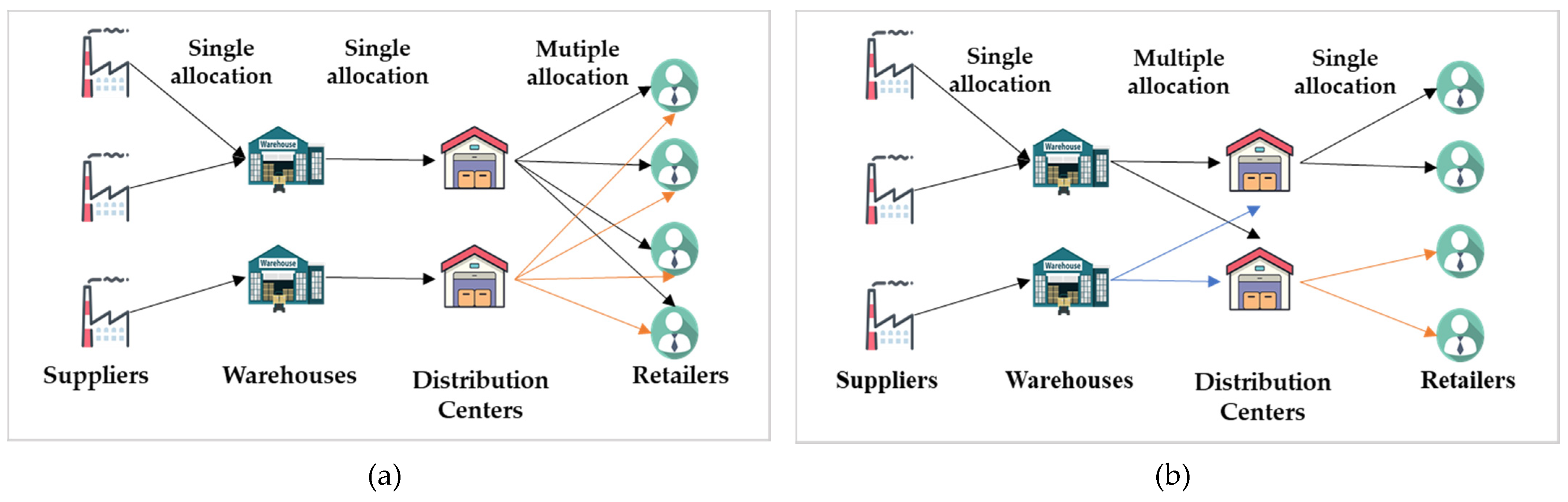
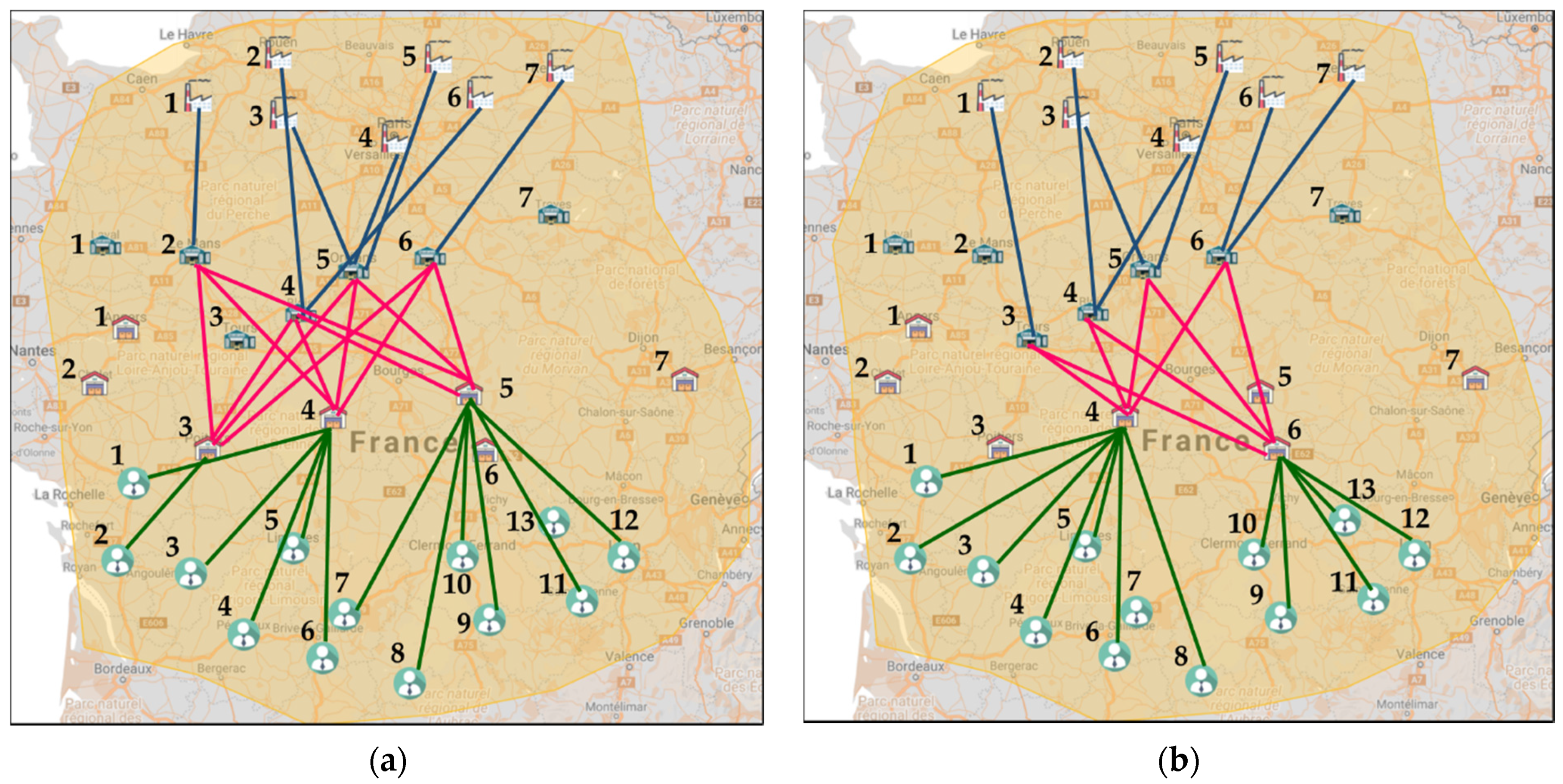
The examined mathematical model was first proposed by Mrabti et al. [
46]. It considered two scenarios (see
Figure 3). The first scenario (Sc1) imposed that each supplier was assigned to a single warehouse (single allocation), which, could deliver to only one distribution center (single allocation), and each retailer could be assigned to several distribution centers (multiple allocation). However, the second scenario (Sc2) differed from the first one at the levels of the assignments of warehouses to the distribution centers, on the one hand, and retailers to distribution centers, on the other hand. Therefore, each warehouse can deliver multiple distribution centers (multiple allocation) and a retailer can only be assigned to one distribution center (single allocation).
To formally introduce the studied problem, the following notations were used in the remainder of this study.
Sets
T1: Set of periods
P: Set of products
N: Set of suppliers
M: Set of warehouses
K: Set of distribution centers
J: Set of retailers
V: Set of vehicles
F: Set of nodes F =
H: Set of hubs H = M K
T2: Set of periods considering the flexibility in the delivery time:
T2 = T1 +
A1: Set of arcs in the upstream part between suppliers and warehouses
A2: Set of arcs in the midstream part between warehouses and distribution centers
A3: Set of arcs in the downstream part between distribution and retailers
A: Set of arcs A =
Parameters
: European pallet surface
: Quantity of product p requested by the retailer j in period t
: Safety stock of product p in hub m
: Unit transport cost of fully-loaded v-type vehicle
: Unit transport cost of an empty v-type vehicle
: Distances travelled between origin i and destination j
: Transportation cost between origin i and destination j by v-type vehicle at period t
: Storage cost of product p in hub m at period t
: Unit storage cost of product p in hub m at period t
: Penalty cost of product p at period t
: Unit penalty cost of product p at period t
: Opening cost of hubs m
: Unit opening cost of hubs m
: Unit unloading cost of product p
: Unit loading cost of product p
: Unit sorting cost of product p
: Handling cost of product p in hub m at period t
: Coefficient greater than or equal to 2
Z: A large constant
: CO2 emissions from v-type vehicle, while travelling from origin i to destination j at period t
: Unit CO2 emissions from fully-loaded v-type vehicle
: Unit CO2 emissions due to empty v-type vehicle
: CO2 emissions due to the operation of hubs m at period t
: CO2 emissions due to the construction of hubs m
: Unit CO2 emissions due to the construction of hubs m
: CO2 emissions due to the manufacturing of v-type vehicle with depreciation
: Energy consumed by hub m at period t
, , and : Bodily, fatal and nonfatal Accident rate
Ac: Number of accidents caused by heavy vehicles
D: Total travelled distance
NL: Noise level
: Representative flows in light or heavy vehicles
V: Speed
d: Distance to the platform edge
lc: Width of the road
: Angle under which we see the road
: Flow rate of heavy goods vehicle that flows between origin i and destination j at the period t
: Noise level when transporting goods from origin i to destination j at the period t
: Percentage of mortality
: Acoustic equivalence factor between light and heavy vehicles
Variables
: Quantity of product p transported from origin i to destination j by the v-type vehicle at period t
: Inventory level of product p in hub m at period t
: Hub m capacity
: Number of v-type vehicles at period t between origin i and destination j
: Quantity of product p delayed in period t
: Hub m area
: Binary variable equals to 1, if the warehouse m is open, and to 0 otherwise
: Binary variable equals to 1, if there is a link between the two nodes i and j, and to 0 otherwise
: Binary variable equals to 1, if the retailer j is affected to the distribution center k, and to 0 otherwise
Considering the above-described notations, the problem dealing with scenario Sc1 was formulated as follows:
subject to
The economic objective function (1) minimized the logistics costs linked to transportation, storage, late delivery penalties, the establishment of hubs, and handling represented respectively by ((2), (3), (5), (7) and (9)). The inventory level in warehouse m was given by (4). The delayed amount of product p at period t was shown in (6). The initial delayed quantity was equal to zero. The area of a hub m to build was given by (8). The environmental objective function (10) minimized the various CO2 emissions due to vehicles (their manufacture and operation), represented by (11), and to hubs (their construction and operation) demonstrated by (12) and (13). The accident rate per thousand km was given by (14). The multiplication by two in (15) was done to consider the empty return. Knowing that an accident injury can be fatal or nonfatal, the other two accident levels (nonfatal injury and fatal injury) might be also assessed. The first level was given by (16). This mortality rate was determined from statistical reports on road safety in France. The rate of nonfatal accidents was given by (17). The noise level was obtained by (18). The acoustic equivalence changed depending on the degree of the ramp and the type of track. The route chosen by the authors was a motorway, which was a communication road with separate lanes reserved for the rapid circulation of motor vehicles (cars, motorcycles, and heavy goods vehicles). The motorway was made up of 4 express lanes (2 per direction); each of which had a width of 3.5 m. The distance to the platform edge, measured by meter, was defined as a distance between the edge of the road platform and the receiver (person and buildings, etc.). The receiving point was assumed to be 30 m from the road. As far as the speed was concerned, it was fixed at an average speed equal to 80 km/h. After simplification, (19) was used to evaluate the noise level generated by the distribution of goods. The flows of heavy goods vehicles were equal to the number of vehicles or the number of trips. They were given by formula (20). Constraints (21) and (22) ensured the satisfaction of the retailers. In fact, constraint (21) guaranteed that the sum of the quantities delivered by all the suppliers in period t and the stock level of the previous period must be greater than or equal to the quantity of goods delivered between the hubs. The initial inventory level was equal to zero. Constraint (22) ensured that the quantity of inter-hub goods delivered from the warehouse to the distribution center in each period must be exactly equal to the quantity delivered to retailers. Constraint (23) guaranteed the satisfaction of the requests during the authorized periods. Indeed, for each product, the demand of the retailers in each period must be delivered at most in period t + ap. In our case, ap designated the number of periods authorized to deliver the product p. In other words, this parameter designates the level of flexibility in terms of delivery time of each supplier. Constraint (24) indicated that the stock level of each product in the upstream hubs must not be lower than that of the safety stock. Constraint (25) showed that the incoming quantities must be less than the capacities of the hubs. Constraints (26) and (27) demonstrated that a warehouse was only open if, at least, one supplier was assigned to it and that a platform was only open if at least one warehouse was assigned to it. Parameter Z was equal to a large constant. Constraint (28) guaranteed that the number of platforms to be opened was always less than that of candidates. Constraint (29) was used to limit the flow of flows on the arcs. Indeed, no quantity of goods circulated between the nodes unless there was a link between them. Constraint (30) ensured that a supplier was assigned to a single warehouse. Constraint (31) revealed that a warehouse was assigned to a single distribution center. Constraint (32) determined the number of vehicles required to transport the goods on the three parts of the distribution network. Constraint (33) limited the number of vehicles used on each arc. Constraint (34) was employed to conserve flows. The last constraints (35)–(41) provided the domains of defining each decision variable.
The difference between the problem dealing with Sc2 and that dealing with Sc1 was summarized by the following equations:
Equation (42) ensured that each retailer was delivered by a single distribution center and (43) guaranteed that each shared warehouse could deliver goods to many distribution centers.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}