1. Introduction
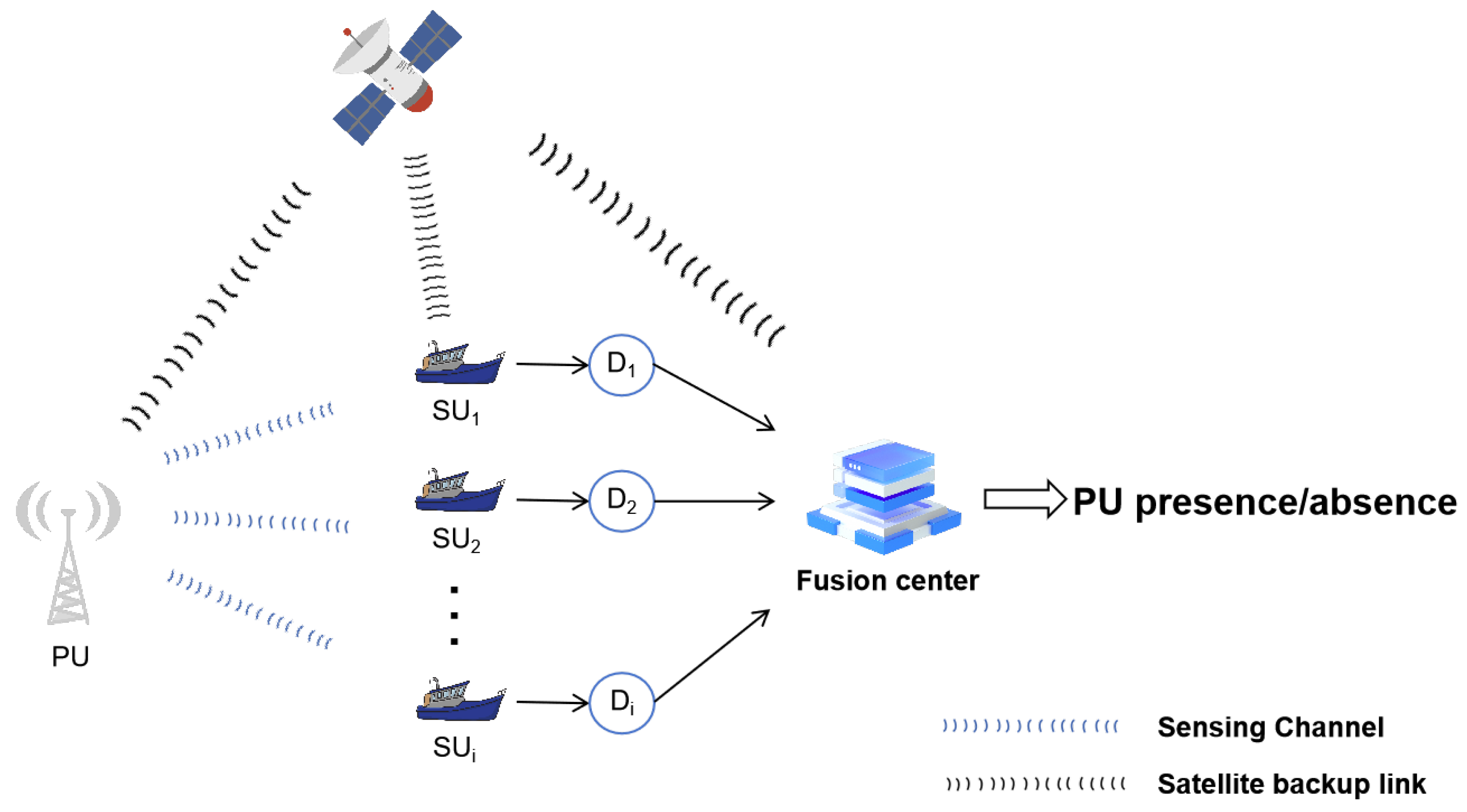
Cognitive radio (CR) addresses the challenge of uneven spectrum resource utilization by employing dynamic spectrum allocation strategies. This allows secondary users (SUs) to access frequency bands used by primary users (PUs) without disrupting their communications, thereby offering a promising solution to meet growing bandwidth demands in a resource-limited spectrum environment. Spectrum sensing (SS) is a critical component for enabling CR technology. In SS, SUs must promptly detect the presence or absence of PUs to quickly release frequency resources when PUs appear, ensuring uninterrupted transmission for PUs. Therefore, we need SS to have high accuracy, real-time performance, and low complexity.
The traditional spectrum sensing algorithms include energy detection [
1], matched filter detection [
2], and cyclostationary feature detection [
3]. These algorithms have different implementation principles and, as a result, exhibit distinct advantages and disadvantages in terms of detection performance. The propagation of radio waves in water is subject to variation, and the unevenness of the sea surface can result in the occurrence of negative interference in the reflection path [
4]. The complexity and variability of the maritime environment make maritime spectrum sensing a challenge with high uncertainty and dynamic changes. In the past, researchers have typically taken the Cooperative Spectrum Sensing (CSS) approach. For instance, one study [
5] proposed an entropy-based CSS method that demonstrated improved detection rates and stability compared to energy detection. Another approach [
6] introduced a biologically inspired CSS algorithm, which selects SUs for collaboration based on the sea state to achieve energy-efficient, highly adaptive spectrum sensing with a robust detection probability. Additionally, a centralized double-threshold CSS scheme for maritime communication networks was proposed in [
7], which involved consolidating the received signal energy data from each cognitive node at a fusion center for decision-making.
Despite their effectiveness, traditional spectrum sensing methods are often limited by their sensitivity to noise and reliance on prior knowledge of PU signals. The rapid advancement of deep-learning technologies presents a compelling alternative to address these limitations, offering enhanced learning capabilities, automatic feature extraction, and robust generalization [
8]. For example, in [
9], the author uses LSTM (Long Short-Term Memory) for spectrum sensing to identify the presence or absence of a Primary User (PU) by learning the temporal correlation in the spectrum data. In [
10], a Convolutional Neural Network (CNN) was employed to analyze signal spectrum maps as input, while [
11] proposed a cooperative CSS approach using graph convolutional networks (GCNs), transforming the signal perception matrix into graph data suitable for analysis. The CNN-LSTM spectrum sensing model introduced in [
12] leverages the covariance matrix of signals, using CNN for energy feature extraction and LSTM to learn PU activity patterns.
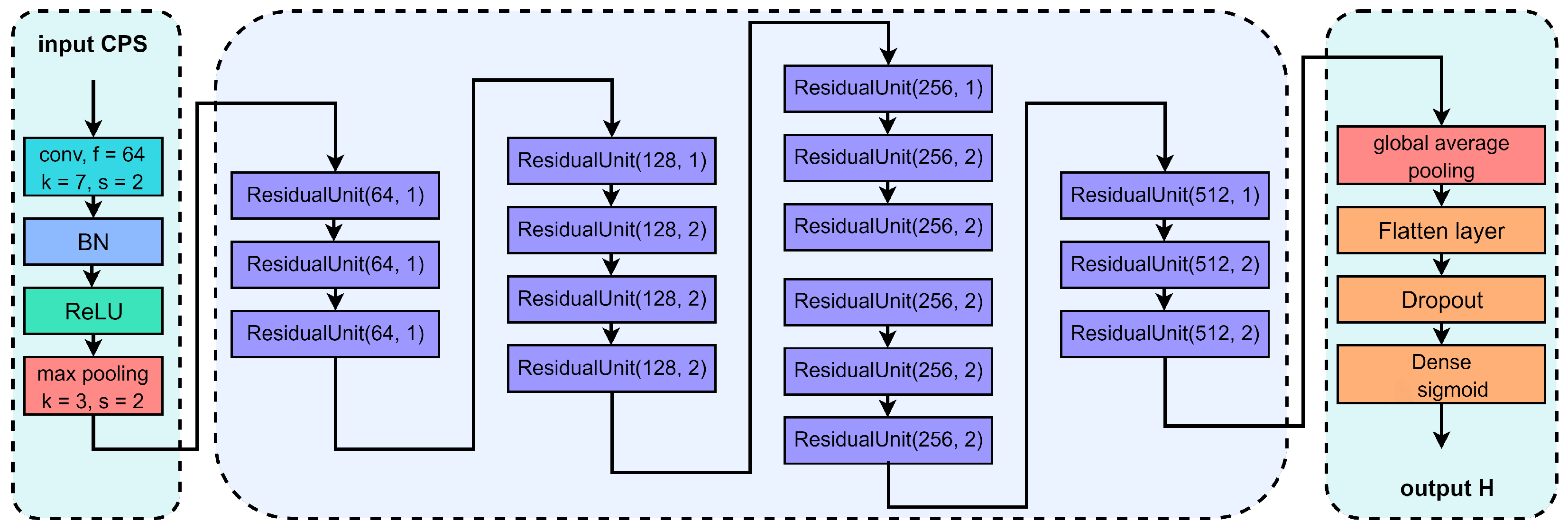
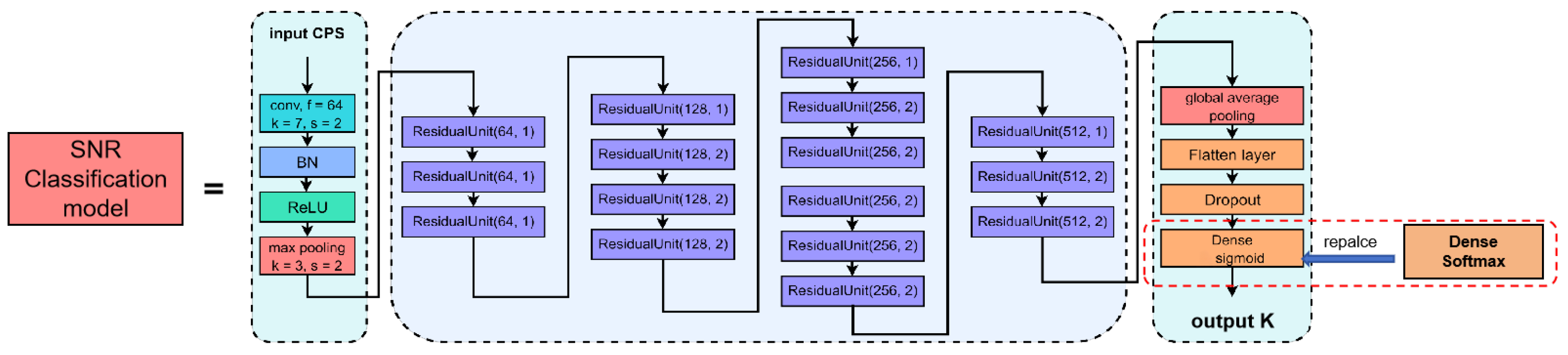
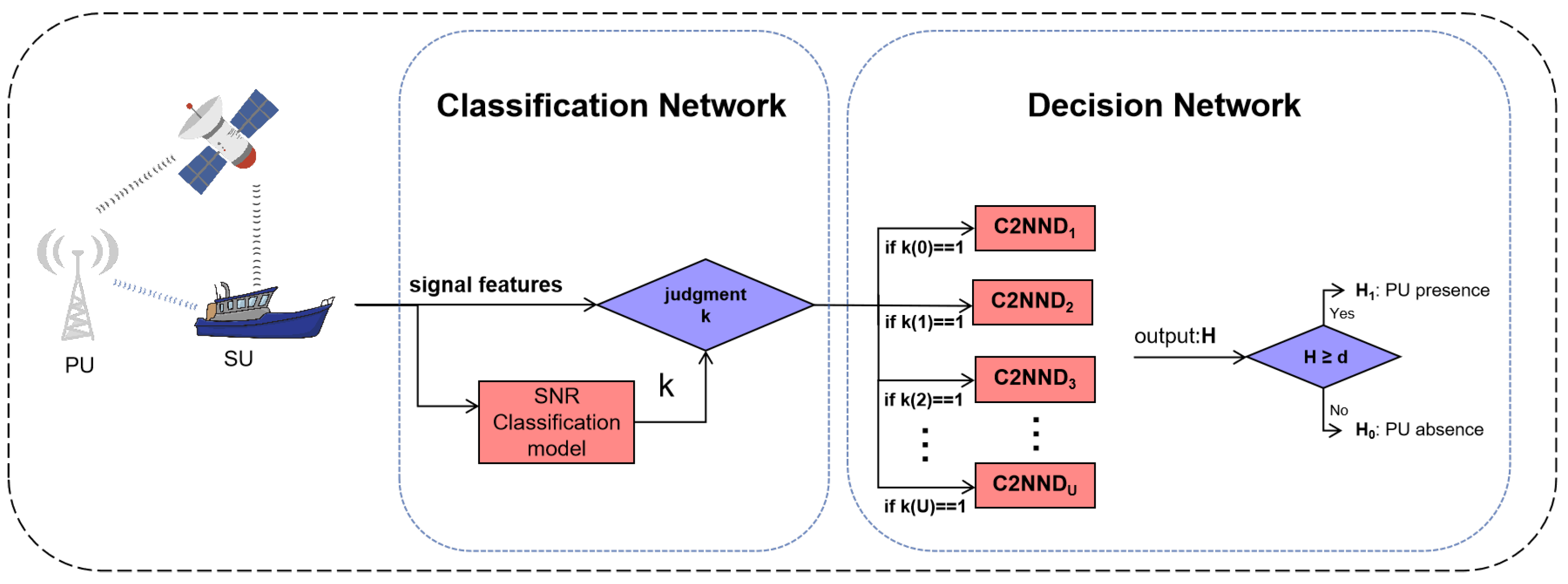
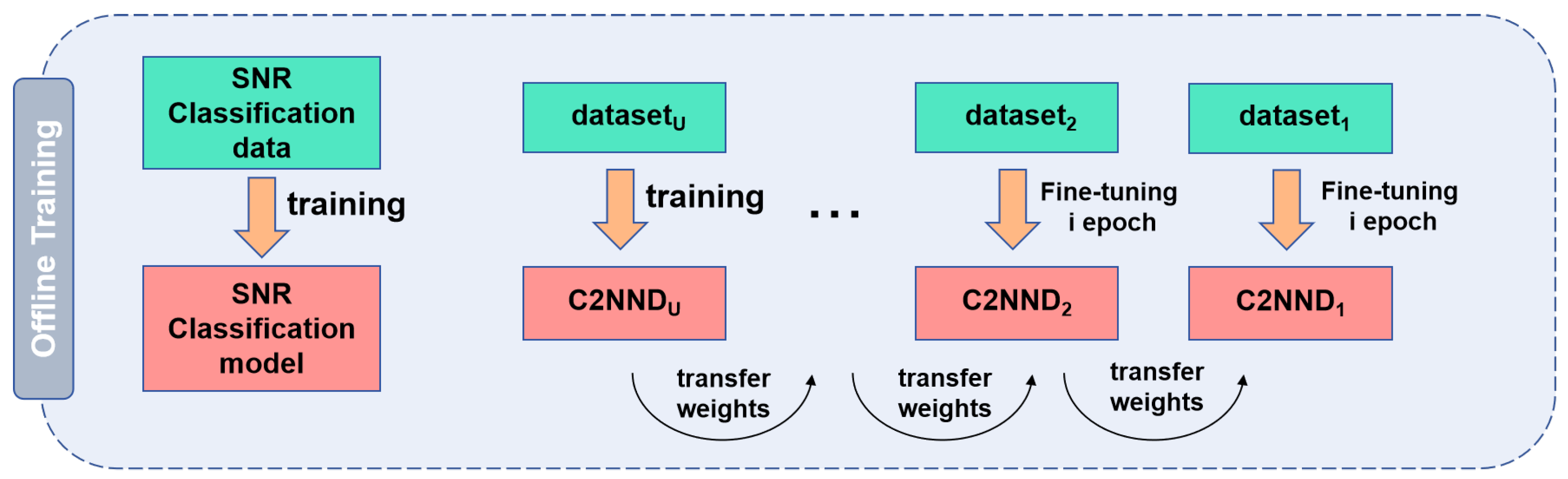
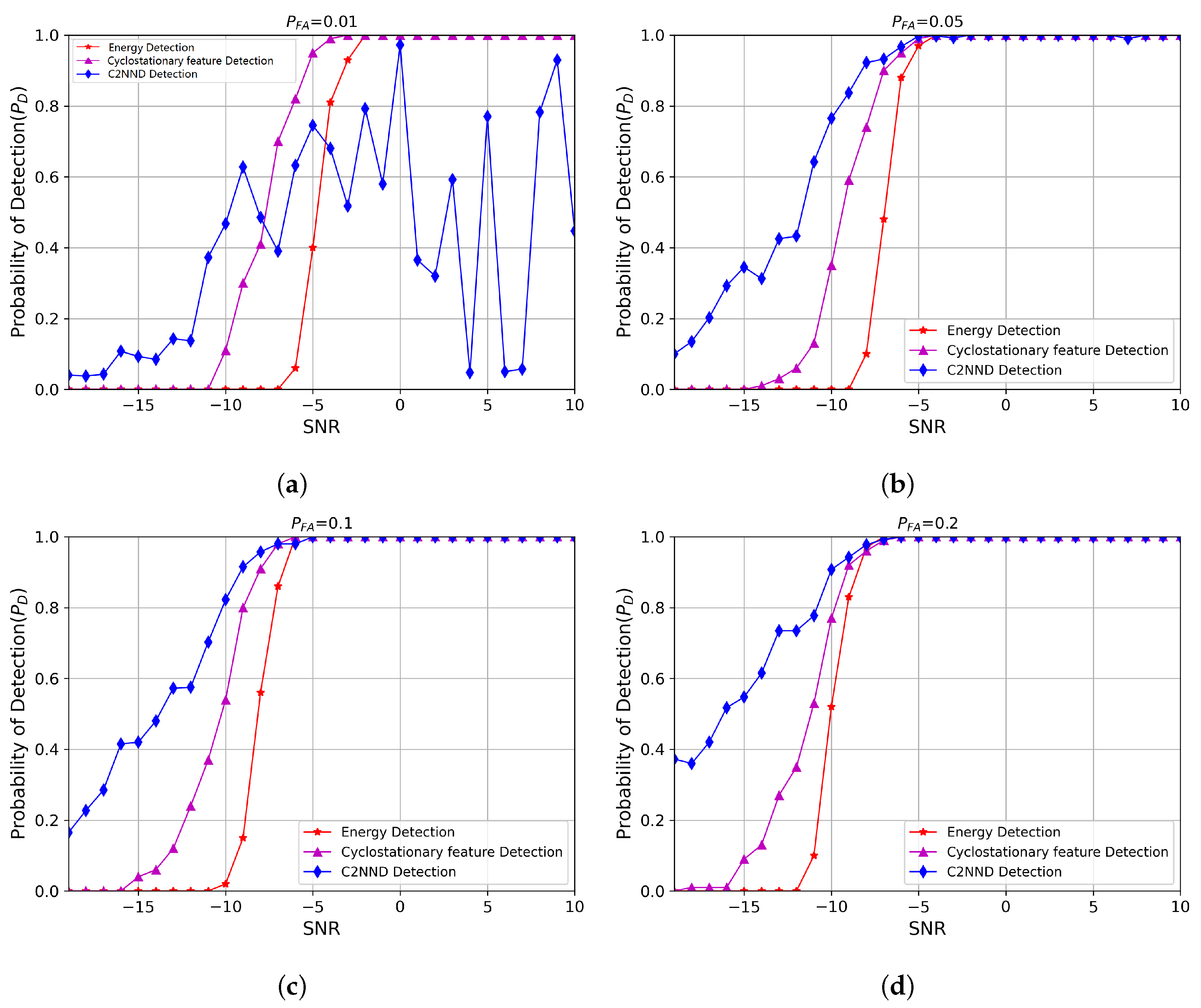
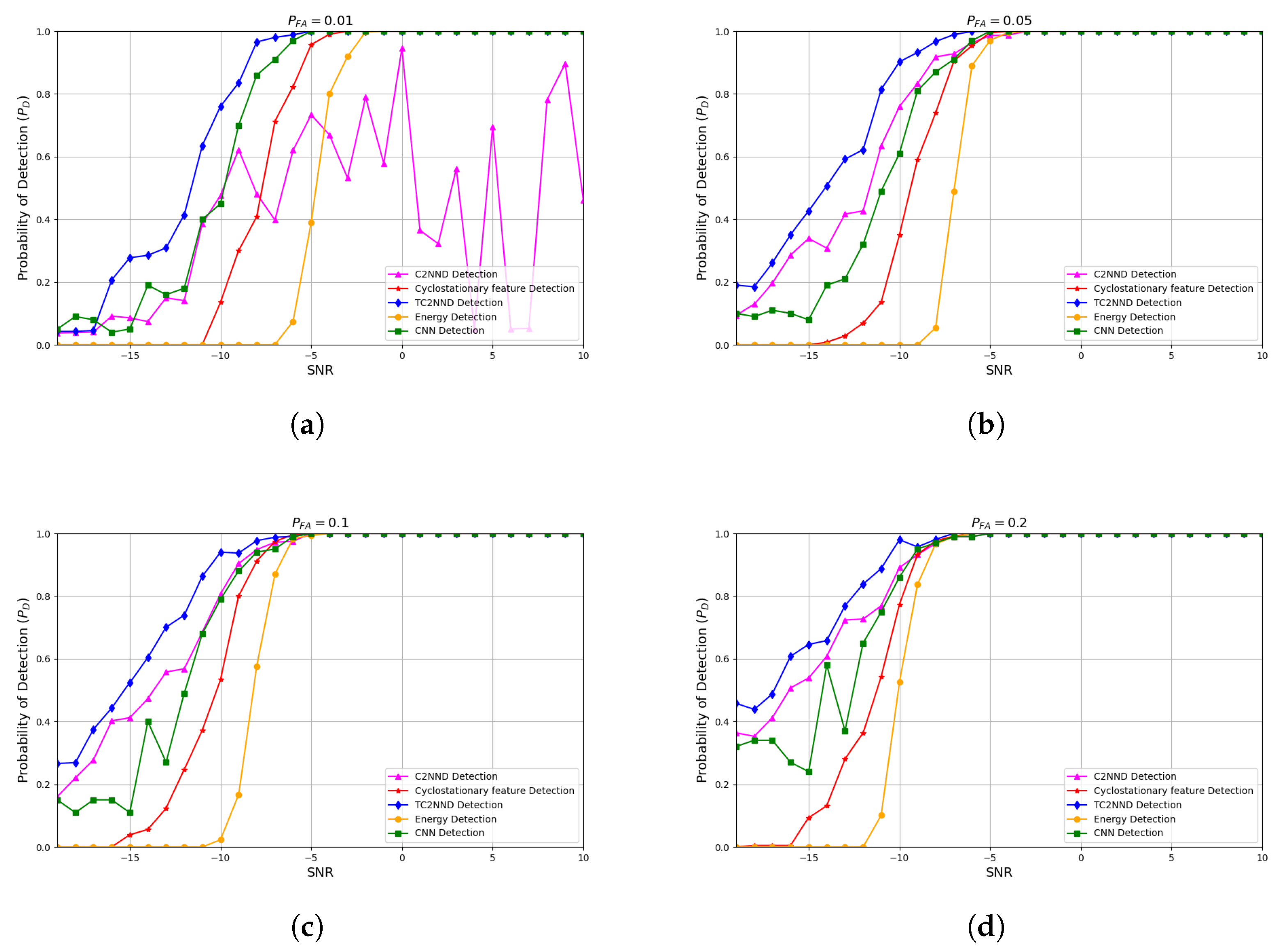
While existing deep learning-based spectrum sensing approaches have mainly focused on enhancing detection accuracy, they frequently neglect the crucial necessity of maintaining low false-alarm rates. This is a pivotal consideration in maritime environments where uninterrupted communication for primary users (PUs) is extremely important. To address this challenge, we propose the classification-guided multi-network TC2NND method. This approach considers the spectrum sensing problem as a classification task. We apply the FFT Accumulation Method (FAM) algorithm to estimate the CPS, which serves as input for TC2NND. The TC2NND first classifies the input based on different signal-to-noise ratio (SNR) levels, and subsequently employs multiple parallel decision models C2NND to make decisions based on the classification results. Our simulation results indicate that using a single C2NND decision model outperforms traditional energy detection and cyclostationary detection methods; however, it cannot guarantee low false-alarm rates under certain conditions. The TC2NND method effectively addresses this limitation, enhancing detection performance at low SNRs while maintaining a false-alarm rate below 1%.
3. Cyclostationary Feature Analysis and Dataset Generation
In a maritime cognitive wireless communication system, the PU is typically a maritime voice intercom system, primarily using frequency modulation (FM).Therefore, the signals exhibit second-order cyclostationarity, making cyclostationary analysis a valuable approach for detection.
For the transmitting signal
with second-order cyclostationarity, the Fourier series expansion of its periodic Autocorrelation Function (ACF) is expressed as follows:
where the periodic autocorrelation
is defined as follows:
where
is the time delay related to ACF. The
T and
denotes period and cycle frequency, respectively.
Using the Wiener relation, the CPS can be defined as follows:
Based on the formulation provided in Equation (
1), the CPS of received signal is denoted by
where
and
represent the CPS of the received signal and AWGN, respectively. The
indicates the CPS of the PU signal component. As
is not a cyclostationary process, its CPS equals zero at
.
For the received signal
, its periodic ACF is computed by
where
According to cross-spectral analysis, we obtain
where
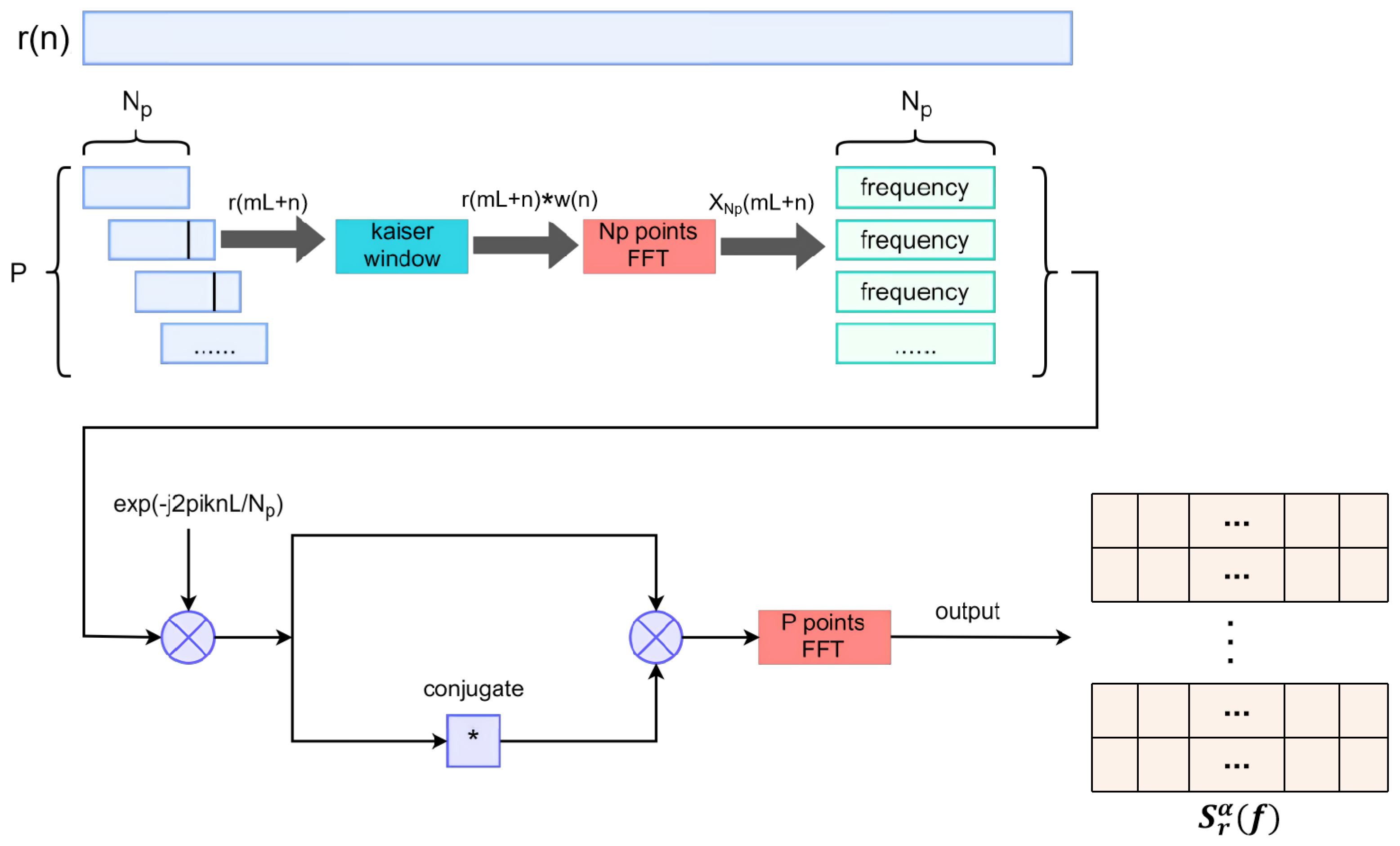
However, cannot be used directly as an estimate of the cyclic spectral density due to its large variance. To achieve a more accurate estimate, we need to use a smoothing technique. In this study, we utilized the FFT Accumulation Method (FAM) to smooth the CPS, thus achieving an acceptable equilibrium between cycle aliasing, computational efficiency, and cycle leakage. Compared to other algorithms (such as the periodogram method, the indirect method, and the SSCA algorithm), the FAM algorithm demonstrates better performance in terms of computational efficiency, real-time capability, and robustness under low signal-to-noise ratio conditions.
We discrete the received signal
to be
, and the CPS estimation is obtained by
where the
P is the number of blocks that
is divided into, and
denotes the total number of points in each block. The value of
L is
, and
, and
where
is the sampling period, and
is a kaiser window with a width of
. The
and
P are calculated by
where
is the sampling frequency, and
is the desired frequency resolution, and
is the desired cycle frequency resolution.
The Block Diagram of FAM algorithm is shown in
Figure 2.
Based on the CPS analysis of the signals, we generate our dataset. We use the Binary Phase Shift Keying (BPSK) modulation to generate the dataset due to robust performance of BPSK under low signal-to-noise ratio (SNR) conditions and its cyclostationary characteristics, which are well-suited to the spectrum sensing approach based on cyclostationarity in our work. First, BPSK signals
are generated and added by AWGN
, in which the
may be thermal noise from the thermal motion of electronic devices, or noise caused by electromagnetic radiation. The signal
passes through the maritime channel model with AWGN to obtain
. Subsequently, we calculated and normalized the CPS of received signal and noise, and then assigned their corresponding labels. The detailed process of dataset generation is summarized in Algorithm 1, in which
is the amount of sample data generated at each Signal-to-Noise Ratio (SNR).
| Algorithm 1 Dataset Generation |
- 1:
for snr do - 2:
for do - 3:
Genrate BPSK signal with length - 4:
- 5:
- 6:
- 7:
Refer to Equation ( 15) to calculate and normalize the CPS of , assign label = 1 - 8:
Generate noise with length - 9:
Refer to Equation ( 15) to calculate and normalize the CPS of , assign label = 0 - 10:
end for - 11:
end for
|
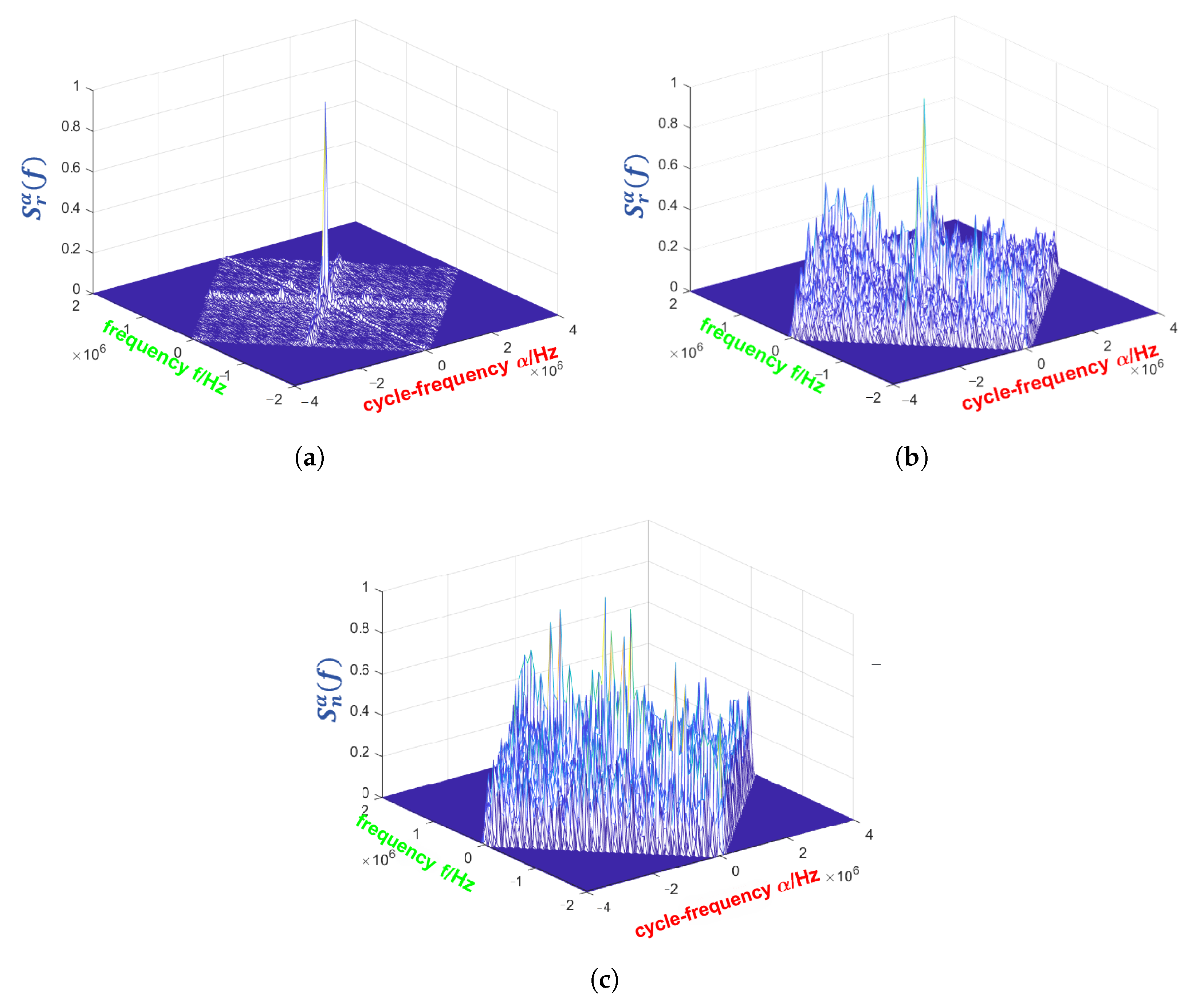
The cyclostationary features of the PU signal in different SNR are shown in
Figure 3 by simulation, in which the CPS are calculated with FAM algorithm. As the SNR decreases, it becomes more difficult for the receiver to identify signal features and thus determine whether the PU is present.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}