Abstract
Consensus protocols for a multi-agent networked system consist of strategies that align the states of all agents that share information according to a given network topology, despite challenges such as communication limitations, time-varying networks, and communication delays. The special orthogonal group plays a key role in applications from rigid body attitude synchronization to machine learning on Lie groups, particularly in fields like physics-informed learning and geometric deep learning. In this paper, N-agent consensus protocols are proposed on the Lie group and the corresponding tangent bundle , in which the state spaces are and , respectively. In particular, when using communication topologies such as a ring graph for which the local stability of non-consensus equilibria is retained in the closed loop, a consensus protocol that leverages a reshaping strategy is proposed to destabilize non-consensus equilibria and produce consensus with almost global stability on or . Lyapunov-based stability guarantees are obtained, and simulations are conducted to illustrate the advantages of these proposed consensus protocols.
1. Introduction
In the past few decades, multi-agent systems have gained attention due to a wide range of applications, such as robotics, unmanned aerial vehicle swarms, and satellite formations. A key challenge is achieving consensus, where all agents in the network achieve a common (or desired relative) state, despite differences in initial conditions and communication constraints. Various approaches to the consensus problem have been pursued, such as consensus via optimization [1], where algorithms for global synchronization and balancing on connected compact manifolds become symmetric with respect to the absolute position on a manifold, allowing focus on the relative configuration. Geometric approaches for non-linear consensus problems are presented in [2], and global convergence issues not present in linear models are examined. Additional factors such as time delays in communication between agents may also be considered [3]. In all previous research on consensus, the importance of the communication topology is emphasized [4].
Lie groups, including , are used in machine learning methods by modeling transformations in a smooth and structured manner. Applications that require rotational invariance, such as robotics, computer vision, and physics simulations, can benefit from consensus-based distributed learning on , as presented in [5]. Decentralized learning frameworks can be employed to train models that respect the symmetries of rotational invariance and equivariance, such as in [6,7]. Consensus problems with multiple agents can learn representations that are equivariant to rotations, ensuring consistent performance regardless of orientation. For example, a reinforcement learning neural network on a robotic arm control system should be equivariant such that, if the arm’s position is rotated, the control outputs should rotate accordingly. Further discussion of this topic is presented in [8]. Some applications on the Lie group in machine learning include representations of higher-dimensional rotations in theoretical physics and geometric deep learning, where data are represented on a manifold with higher-dimensional symmetries. The literature on this topic is limited, providing the opportunity for potential research in developing neural network architectures that are invariant to rotations in four dimensions. However, ref. [9] explores the continuity of rotation representations in neural networks and discusses the general rotation on . The mentioned paper provides insights into the methodologies of representing higher-dimensional neural networks, which can be useful when incorporating symmetries in machine learning models.
Rotation matrices, which are elements of the Lie group , have gained interest in the development of attitude control techniques due to their non-singular and unique representation of rigid body attitude that results in globally continuous control laws [10]. Rigid body attitude consensus (or attitude synchronization) on and the tangent bundle focuses on the cooperative control of the orientations of agents that share information within a network, ensuring that the multi-agent system can function in unison. The concept of consensus control on or its tangent bundle can be interpreted with an understanding of attitude consensus on and . A thorough explanation of attitude using rotation matrices on is presented in [10], including the use of Rodrigues’s formula, which maps the principal angle and axis to the rotation matrix, and Lyapunov-based stability analysis [10].
Various approaches have been taken to achieve consensus on special orthogonal groups. This includes a method similar to ref. [1] that reduces a non-linear consensus problem to the optimization of linear functionals over the convex hull of the group of rotation matrices on [11]. Another optimization approach uses a gradient algorithm based on the cost function of an output space of a system and is applied to synchronization where only partial state information is shared [12]. This is useful in scenarios such as satellite communication links in a constellation where bandwidth is limited between neighboring lines. Similar to ref. [2], a geometric approach for coordinated motion in Lie groups is taken in [13], driving a swarm of simple integrator agents towards local convergence. In ref. [14], an analytical solution to closed-loop kinematics is presented and results in almost globally exponentially stabilizing control laws. An attitude tracking problem for a class of almost global asymptotic stability (AGAS) stable feedback laws is presented in [15] with a closed form solution as well, although non-consensus equilibria are not addressed. A leader–follower strategy for attitude formation tracking control is presented in [16] to achieve the desired relative attitude between agents, and the stability of the proposed tracking control law is enhanced by feedback reshaping. Similarly to the topologies explored in this paper, ref. [17] studies ring communication graphs and the almost global stabilization of consensus with input delays, destablizing undesired non-consensus equilibria using reshaping. Rigid body pose consensus control and the impact of communication delays between agents are studied in [18] on , where rigid body attitudes are expressed as rotation matrices, and the almost global asymptotic stability of the consensus subspace is achieved by an extended Morse–Lyapunov–Krasovski approach. An extension of the Morse–Lyapunov approach is also used in [19] to achieve the almost global asymptotic stability of the consensus subspace on Lie groups and .
In ref. [20], non-linear stability analysis and Lyapunov’s direct method are applied to design non-linear feedback control laws for rigid body control on and for the problem of multi-body attitude synchronization on . The improvement in globally continuous control laws using rotation matrices and the feedback reshaping strategy is demonstrated via stability analysis and simulation. Without reshaping, the attitude control of a rigid body with initial principal rotation angles (PRAs) close to 180° results in poor closed-loop response performance. Additionally, multi-body attitude synchronization on five- and nine-agent ring graphs results in stable non-consensus equilibria, whereas adding feedback reshaping destabilizes these equilibria and produces attitude synchronization with almost global stability. The authors find that applying a reshaping function for the PRA designed to destabilize the non-consensus equilibria ensures the almost global stability of the consensus subspace with a fixed number of agents. The authors observe that different numbers of agents may require different reshaping functions. Consensus with AGAS is achieved as long as the relative PRA of the undesired equilibrium is greater than the angle that maximizes the reshaping function. In this paper, four-dimensional rotations are used to represent an agent’s configuration, synonymous to an agent’s attitude in three dimensions, which is analagous to the application of rotation-invariant neural networks in four dimensions. Consensus protocols are proposed on the Lie group and its corresponding tangent bundle . These protocols are proven to achieve almost global asymptotic stability when applying the feedback reshaping strategy presented in [20].
The remainder of this paper is organized as follows. Section 2 provides the background on communication topologies and the properties of . Section 3 presents a proposed consensus protocol on with reshaping that destablizes non-consensus equilibria and achieves almost global asymptotic stability. Section 4 extends the consensus protocol to . Simulations on a five-agent ring graph and a nine-agent ring graph and ring lattice are subsequently presented. Finally, some conclusions are offered in Section 5.
2. Background
2.1. Communication Graph
Assume that there are N agents in a network represented by an undirected graph , where is the graph, is the node set, and is the edge set with edges. For agents , is the non-negative adjacency matrix of , where if agents i and j have a bidirectional communication path and if not. In addition, it is assumed that there are no self-loops, so . The degree matrix of the graph is a diagonal matrix where
The graph Laplacian is then defined as . Given an arbitrary edge orientation of the undirected graph, an oriented incidence matrix can be constructed of size , where . If the undirected graph is connected, then there is exactly one zero eigenvalue of the matrix. The corresponding eigenvector, which is a vector of ones (possibly scaled by some real number), represents the consensus subspace. The proof involves recognition that the rows of sum to zero. For an undirected and connected graph, the linear Laplacian flow solves the average consensus problem.
Ring graphs are a unique communication topology, known as difficult networks in which to achieve consensus or synchronization, as described in [21]. Ring graphs have equal numbers of edges to nodes, . Ring lattices consist of nodes arranged in a ring, and each node is connected symmetrically to m of its nearest neighbors on each side. These graphs are illustrated in Figure 1.
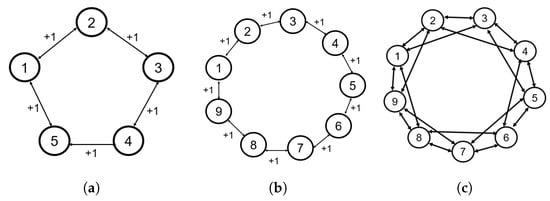
Figure 1.
Three communication topologies: (a) 5-agent ring graph, (b) 9-agent ring graph, and (c) 9-agent ring lattice.
The connectivity of a graph is defined as [21]
where and is the maximum possible degree for any node in the N-agent graph. The connectivity ratio varies between 0 and 1, where a fully connected (complete) graph results in , an N-node ring graph has , and an N-node ring lattice with has . Specifically, the graphs in Figure 1 have connectivities of (a) , (b) , and (c) . The connectivity and symmetry properties of the network, along with the reshaping strategy to be introduced, influence the existence of any stable non-consensus equilibria in certain non-linear multi-agent systems on undirected graphs [21].
2.2. Properties of
Rotations in higher-dimensional spaces have been a subject of considerable interest in fields such as mathematics, physics, and computer sciences. Methods of generating a rotation matrix in higher dimensions have been explored, including the use of Rodrigues’s formula and Cayley’s transforms, as discussed in [22,23,24,25]. This paper utilizes the Rodrigues formula to map the principal rotation angles (PRAs) and planes of rotation to an element on . The decomposition of a 4D rotation matrix in terms of an exponential skew-symmetric matrix is presented in [23,25,26] and is also leveraged here.
The intuitive three-dimensional rotation by a principal angle about a principal axis in is replaced by planes of rotation in four dimensions on . Four-dimensional rotations can be decomposed into two PRAs and a set of two principal planes, which replace the principal angle and axis in . Methods to compute the PRAs and planes from a provided rotation matrix are discussed in [24], which is useful in classifying the rotation being applied. Meanwhile, ref. [25] presents an extensive discussion of the differences between simple, double, and isoclinic rotations. Algorithms to determine the PRAs, planes, and type of rotation are presented. This paper focuses on the most general case of double rotations to show how principal angles , associated with the absolute or relative configurations, evolve under the consensus control problem.
Consider the proper orthogonal matrix . Similarly to , this matrix represents a rotational transformation in four-dimensional Euclidean space . The key difference between the dimensions is that, in three dimensions, the rotation is about an axis, whereas, in four dimensions, the rotation is about a plane. All vectors in the plane are mapped to other vectors in the same plane by the rotation and are related by corresponding eigenvalues and eigenvectors of the rotation matrix. Rotations in have at most two planes of rotations. The plane of rotation determines the classification of the rotation: (1) simple rotation—a single plane of rotation; (2) double rotation—two angles of rotation, each corresponding to one of two orthogonal planes of rotation. Isoclinic rotation is a specific type of double rotation where the non-zero angles of rotation about both planes are equal.
Let be a double rotation in the four-dimensional Euclidean space about the plane by angle and plane by angle . Thus, the planes about which the rotations are performed are and . This results in R in a particular basis with the normal form given by
The convenience of the basis above is that the eigenvalues of the matrix are readily given by , where is the spectrum operator and and are the PRAs. Equation (3) can be decomposed into two rotations as , where , . The characteristic equation for a general can be easily obtained from Equation (3) as
The comparison of Equation (4) with the standard form of the characteristic equation of a proper orthogonal matrix given by
results in the first- and second-order traces defined in terms of the PRAs as
and
The PRAs are then obtained by simultaneously solving Equations (6) and (7) as
In the case of a simple rotation, , , . For an isoclinic rotation, , .
As presented in ref. [25], the Rodrigues formula can be extended from to . The Rodrigues formula on in terms of principal angle and principal axis with is given by , where is the cross-product operator that maps an element of to a skew-symmetric matrix, , and is the Lie algebra associated with the Lie group . Using this formulation as a guide, the Rodrigues formula on can be obtained as follows. For a skew-symmetric matrix , where is the Lie algebra associated with the Lie group , and , the decomposition , holds such that , , , , and
Using the properties of the matrix exponential, as well as the power series expansions of and , this can be reduced to the Rodrigues formula on given by
Using the formula , , in terms of the planes of rotation and , where , the symmetric component of R can be expressed as
Equation (11) will be used in obtaining the classification of critical points of the Morse–Bott–Lyapunov function.
A standard form for matrix S in Equation (9) is [22]
where the operator undoes the “wedge” operation, such that
The standard form for the characteristic equation of a skew-symmetric matrix is
Using this and Equation (12), it can be shown that and [22]. Using the basis assumed in Equation (3), the matrix S takes the real normal form given by
The characteristic equation for matrix S in Equation (15) is . Comparing with Equation (14), the two PRAs are solved for as
In the case of a simple rotation where , , we have . For an isoclinic rotation where , we have .
The challenge of representing the angular rate in four dimensions is discussed in [27]. The ability to represent the angular rate as a vector is unique to three dimensions. For four dimensions and above, the angular rate must be represented by a dyadic or tensor of the second rank. This becomes apparent when defining the four-dimension rotation matrix kinematics. The kinematic differential equation for is [14]
where
and . Note that, in ref. [14], the kinematics are presented as right-invariant, or , whereas this paper will maintain left-invariant kinematics. The dyadic is a representation of the angular rate in four dimensions. Thus, Equation (17) corresponds to the kinematics on , namely , although is not a physical angular velocity vector since the vector representation of the angular rate is unique to three dimensions, as emphasized in [27].
2.3. Morse–Bott–Lyapunov Function and Reshaping
In this section, the Morse–Bott–Lyapunov function on , along with its accompanying regulation protocol that drives an element of to the identity matrix, is shown, and the reshaping strategy is introduced. These topics are preliminary to introducing the consensus protocols on and in the following section. The derivation of the regulation protocol uses a Lyapunov-based approach in which the Lyapunov function, which is also a Morse–Bott function on , and its derivative have assumed forms in order to extract a regulation protocol.
Consider the Lyapunov candidate function, which is also a Morse–Bott function on , as will be shown, as
where q is the desired number of harmonics in the feedback protocol, and are positive coefficients that satisfy the following assumptions:
Assumption 1.
;
Assumption 2.
;
Assumption 3.
The only solutions of are .
The simplest form of Equation (19) and the resulting protocol corresponds to and is called the Base case. The rationale behind using and selecting the coefficients is provided by the reshaping strategy, which will be explained subsequently.
Using the kinematics defined in Equation (17), the Lyapunov rate becomes
where
and
Setting the Lyapunov rate in Equation (20) equal to
it is seen that Equation (19) is a Lyapunov function. Equations (20) and (23) result in the protocol
and the closed loop
Since Equation (19) has been established as a Lyapunov function, the conclusion can be made that is locally stable in Equation (25). Note that, in the Base case , the protocol is and the closed loop is . The following theorem demonstrates that is almost globally asymptotically stable and that is also a Morse–Bott function.
Theorem 1.
Proof.
The variation in R with time held fixed is obtained from Equation (17) as
where is a variational matrix. Taking the variation of Equation (19) and using Equation (26) results in
The critical points of Equation (19) and the equilibria of Equation (25) can be analyzed by assessing . Since is an arbitrary variation, this is equivalent to , which results in , and the submanifold of rotations about any one or two planes and , which is equivalent to the pair of PRAs . To classify the critical points and determine the stability of these equilibria, the second variation of Equation (19) is obtained as
where the Hessian is defined as
and
The matrices are submatrices of R that result from partitioning as
and . Evaluating at the critical points, the identity configuration is a Morse critical point with . Similarly, the submanifolds of rotations in and/or are non-Morse critical points, where using the normal form in Equation (3) and Assumptions 1 and 2 yields as a diagonal matrix with matrix elements and , while has and , both resulting in indefinite , while . Equation (11) can be used to calculate in terms of the planes of rotation . Since using different planes of rotation and would not change the eigenvalues of , it is seen that is non-degenerate in the directions normal to the equilibrium manifold and degenerate along the tangent directions to the critical manifold, corresponding to rotations by . Thus, Equation (33) is a Morse–Bott–Lyapunov function. Therefore, there is a neighborhood of where , while, because the submanifolds of rotations by constitute a set of zero measure in , the stability of in Equation (25) can be strengthened to almost global asymptotic stability (AGAS). □
Reshaping is a protocol strategy that has been presented in [16,20]. The coefficients q and are chosen as defined in [20], with the restrictions in Assumptions 1–3 for the Base case and two reshaping cases as follows:
- Base case (no reshaping): ;
- Case 1 reshaping: , ;
- Case 2 reshaping: , .
Consider the function in the reshaping strategy. This function is derived from the Fourier series expansion of an odd function of one of the principal rotation angles [20]. This function for the Base case and reshaping cases 1 and 2 is shown in Figure 2. Both presented reshaping functions defined by Fourier expansions show that the PRA associated with the maximum of is decreased with respect to 90° for the Base case. Specifically, for Case 1 reshaping and 35° for Case 2 reshaping. Although the reshaping strategy does not affect the stability in Equation (25) for a single agent, it will be seen that the location of the maximum of determines the stability of certain non-consensus equilibria of the closed-loop dynamics for the multi-agent problem. This is used to increase the region of attraction of the consensus manifold of the multi-agent system with the possibility of AGAS stability if no other equilibria are locally stable, as will be seen in the next section. As discussed earlier, the connectivity and symmetry of the network, along with the reshaping strategy, influence the existence of stable non-consensus equilibria in the closed loop for the multi-agent problem.
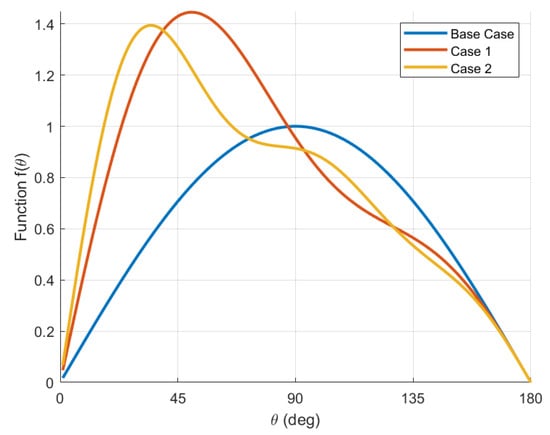
Figure 2.
Function for the Base case and reshaping cases 1 and 2.
3. Consensus on SO(4)N with Reshaping
3.1. Proposed Consensus Protocol on
Suppose that there are N agents that share information according to an undirected and connected communication graph. Let be the configuration of agent i whose angular velocity tensor is . The kinematics associated with the N agents are
for . It is desired to drive the configurations to consensus asymptotically such that for all pairs in the steady state. As in the previous section, a Lyapunov-based approach is applied to obtain the consensus protocol by specifying the Lyapunov function (which is also a Morse–Bott function) and its derivative. For this purpose, consider the Morse–Bott–Lyapunov candidate function on as
where are the elements of the adjacency matrix of the communication graph, and is the relative configuration between agents i and j, for which the two principal rotation angles are and . Using Equations (21) and (32), and the undirected property of the graph, the derivative of Equation (33) becomes
where
Due to the form of Equation (34), it is convenient to choose
where is a positive gain, thus making Equation (33) a Lyapunov function. The resulting consensus protocol can be solved by equating Equations (34) and (36) as
thus yielding the closed loop
Note that the consensus protocol in Equation (37) utilizes the relative Laplacian flow since it uses feedback of the relative configurations. This type of protocol is commonly used with undirected graphs and is required to achieve consensus with almost global stability on a compact manifold such as . A protocol that utilizes an absolute Laplacian flow [28] would be needed for the case of a directed graph, as was conducted in [29] for , although only local consensus stability would be achieved.
It will be shown in the next section that there are three possible classifications of equilibria. The consensus equilibrium where configuration synchronization is achieved results from the solution for all pairs, which implies that the relative configuration PRAs are and Equation (33) achieves its minimum. The case of for at least one pair for and/or while the remaining PRAs are yields an unstable set, resulting in partial consensus. In both of these cases, for all pairs. The third case results when at least one or , and this results when for at least one pair, while the sum over j vanishes for . As will be demonstrated in the simulation, the presence of stable non-consensus equilibria is dependent on the communication topology and reshaping case used. If stable non-consensus equilibria exist, the consensus configuration in Equation (38) is not AGAS stable but locally stable.
3.2. Local Stability Analysis
Consider the Rodrigues formula for the relative configuration
where is the skew-symmetric matrix corresponding to relative configuration , which decomposes into , while , . The variation of Equation (39) is
where the last equality results from differencing infinitesimal variations. Using Equation (40), the first variation of the Lyapunov function in Equation (33) becomes
and the second variation yields
where the Hessian of the second variation is
Consider the Base case, where and in Equations (33) and (37). Then, consider the stack column matrix . Denote the configuration of the multi-agent system as and rewrite as , where , and is the augmented weight matrix. Thus, the critical points of Equation (33) and relative equilibria in the closed loop of Equation (38) are obtained from , while the classification of these points is obtained by rewriting , where , and is the augmented weight matrix that determines the classification.
In addition to relative configurations satisfying , , , or , the third category of equilibria mentioned above may exist. The balanced configuration of an N-agent ring graph results in Morse critical points of , where are integers corresponding to balanced configurations. In the case of a ring graph or ring lattice, for instance, balanced equilibria (which may be stable or unstable) and unbalanced equilibria (always unstable) corresponding to rotations about the same plane(s) also exist. As in the single-agent case, the critical point classification and the stability of depend on the spectrum of ; therefore, the consensus manifold is locally stable. The partial consensus manifold is unstable since , or 2, is indefinite, while is negative definite. In the case of the five-agent ring graph with a balanced equilibrium where or 2, is positive definite with spectrum . Equal weights have been assumed; therefore, local stability can be concluded based on a single pair of connected agents. However, if the weights are not equal, an assessment of the spectrum of or is required for a stability conclusion with different relative configurations between the agents.
The extension to the reshaping case can now be applied by modifying the augmented weight matrices and . The stability of the consensus equilibrium depends on the critical point classification, which, in this case, is solely driven by the spectrum of . In the case of the five-agent ring graph in the balanced equilibrium with Case 1 reshaping, , confirming that the non-consensus equilibria have been destabilized. For the nine-agent ring graph with Case 1 reshaping, a balanced equilibrium is locally stable with . Case 2 reshaping results in an indefinite with , thus yielding unstable balanced equilibria. Similarly, for the nine-agent ring lattice case with , the balanced equilibrium for the Base case is locally stable with and . For a ring lattice with , two pairs of agents must be assessed in order to determine stability via the spectrum of the Hessian for these pairs. Unlike the ring graph, the relative configurations for edges between consecutive nodes (e.g., agents 1 and 2) and edges between non-consecutive nodes (e.g., agents 1 and 3) will not be equal; hence, the corresponding matrices are not equal. Case 1 reshaping results in and , and thus Case 1 reshaping yields an unstable balanced equilibrium for a ring lattice with . Since have been chosen such that , the consensus manifold is locally stable. Furthermore, since it is an isolated critical point, it is locally asymptotically stable. Equation (33) is a Morse–Bott–Lyapunov function for the same reasons as in the case of a single agent. If no other locally stable equilibria exist, then the consensus manifold is AGAS stable. As explained previously, reshaping can be used to enlarge the region of attraction of the consensus manifold and possibly render it AGAS stable.
3.3. Illustrative Examples
In this section, the significance and justification of the use of feedback reshaping is demonstrated for multi-agent consensus on . An undirected ring graph is used, while the initial conditions are chosen in the region of attraction of the consensus manifold, as well as of non-consensus equilibria. The Base case, reshaping Case 1, and reshaping Case 2 are all compared.
3.3.1. Initial Conditions near Consensus
We first show simulations that demonstrate the local stability of the consensus manifold using the Base case protocol for the two ring graphs shown in Figure 1a,b. Figure 3 shows examples of the Base case for both five- and nine-agent ring graphs achieving consensus, where the initial conditions were specifically chosen within the region of attraction of the consensus manifold. The following simulations will demonstrate that the same topologies with certain initial conditions will result in convergence towards stable non-consensus equilibria.
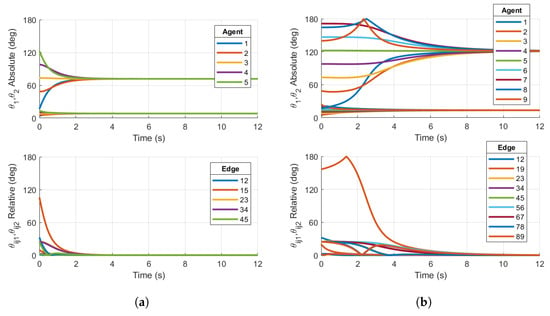
Figure 3.
Simulations on for (a) Base case protocol on a 5-agent ring graph and (b) Base case protocol on a 9-agent ring graph. Initial conditions are chosen within the region of attraction of the consensus manifold. Both plots demonstrate consensus.
3.3.2. Five-Agent Ring Graph with Initial Conditions Away from Consensus
Now, we reconsider the case of the ring graph with agents in Figure 1a. The initial configurations of the agents are now assumed to be
The skew-symmetric matrices have been selected to ensure that the conditions detailed in Section 2.2 are met, including the relation , so that an element in is generated by the relation defined in Equation (9). Initial configurations for the five agents are chosen in the neighborhood of a non-consensus equilibrium to show the improvement achieved by feedback reshaping. The base case protocol with and has been simulated using the protocol derived in Equation (37) and is shown in Figure 4a. The reshaping Case 1 () protocol has also been simulated, with the appropriate coefficients. These results are shown in Figure 4b. When plotting the absolute and relative configurations between agents, the PRAs are computed as derived in Equation (8).
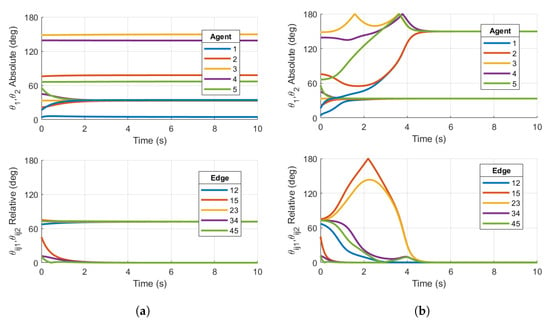
Figure 4.
Simulations on for (a) Base case protocol on a 5-agent ring graph and (b) Case 1 reshaping protocol with on a 5-agent ring graph. Initial conditions are chosen in the region of attraction of the non-consensus equilibria. Right plot demonstrates consensus, while left plot does not.
The results in Figure 4a show that the closed loop using the base case consensus protocol converges to the stable balanced non-consensus equilibrium with separation in one of the PRAs about the same plane of rotation between connected pairs, which is expected since the initial conditions are in the region of attraction for this equilibrium. There are two clusters of relative configurations, denoted by , which converges towards , and , which is driven to zero. This stable non-consensus equilibrium is similar to that for five agents connected by a ring graph with configurations on the unit circle, as in the Kuramoto model [17].
Figure 4b shows the principal angles associated with the relative configurations converging to zero for both PRAs as desired. The two PRAs for each agent converge to the same steady-state limits and , although . This is expected, since nothing is driving the agent’s configuration to an isoclinic rotation. For the five-agent ring topology and initial conditions chosen, the reshaping Case 1 protocol achieves the desired outcome. The reshaping protocol implemented in this simulation has destabilized the stable non-consensus equilibrium and resulted in the AGAS of the synchronized state.
3.3.3. Nine-Agent Ring Graph
Now, we reconsider the case of agents with the undirected ring graph in Figure 1b. The initial conditions are defined in Equation (44), and the simulation is conducted using the reshaping Case 1 and Case 2 protocols.
Similar to the five-agent base case converging to non-consensus equilibria in Figure 4a, the nine-agent Case 1 reshaping fails to destabilize the non-consensus equilibria, resulting in a steady-state value of the relative PRA in Figure 5. This principal rotation angle converges to the separation of the non-consensus balanced equilibrium. This is a result of the fact that . As described in Section 3.1, the Case 1 reshaping algorithm fails to destabilize the non-consensus equilibria. Since stable non-consensus equilbria remain, the resulting consensus configuration is only locally stable and not AGAS stable.
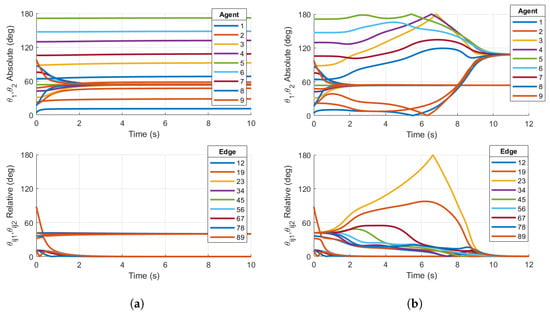
Figure 5.
Simulations on for (a) Case 1 reshaping protocol with on a 9-agent ring graph and (b) Case 2 reshaping protocol with on a 9-agent ring graph. Initial conditions are chosen in the region of attraction of non-consensus equilibria. Right plot demonstrates consensus, while left plot does not.
However, reshaping Case 2 successfully destabilizes the non-consensus equilibria. Figure 5b shows that all associated with the relative configurations converge to zero, signifying that consensus has been achieved. This is expected since .
The results of the nine-agent ring graph simulation confirm the conclusions in [20] for consensus on . Case 2 feedback reshaping destabilizes non-consensus equilibria for a nine-agent ring graph and ensures the almost global stability of the consensus subspace.
3.3.4. Nine-Agent Ring Lattice
Similarly to the previous sections, the undirected, nine-agent ring lattice in Figure 1c is assessed with the same initial conditions as in the nine-agent ring graph simulation. The lattice allows communication with nearest neighbors on either side of each agent.
Figure 6a shows that the base case protocol results in principal angles associated with the relative attitudes converging to separation angles for . Figure 6b shows that Case 1 reshaping successfully destabilizes the non-consensus equilibria and converges to zero relative principal rotation angles, thus showing that consensus is achieved, which is different from the result for the nine-agent ring graph. In general, the addition of connections or increasing the value of m for the ring lattice has the effect of decreasing the stability of the non-consensus equilibria. For a ring lattice with , it has been shown [21] that there is a sequence of ring lattice networks with connectivity approaching (i.e., the maximum node degree is ), for which the balanced equilibrium (in which the minimum separation is ) is still stable. Figure 6c shows that Case 2 reshaping also results in consensus, as well as a faster convergence time with respect to Case 1 in this example. This communication topology further demonstrates the reshaping method’s ability to ensure the almost global stability of the consensus subspace.
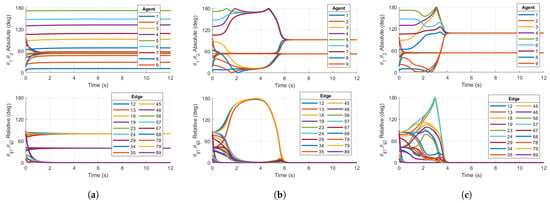
Figure 6.
Simulations on for (a) Base case protocol on a 9-agent ring lattice, (b) Case 1 reshaping protocol with on a 9-agent ring lattice, and (c) Case 2 reshaping protocol with on a 9-agent ring lattice. Initial conditions are chosen in the region of attraction of non-consensus equilibria. (b,c) demonstrate consensus, while (a) does not.
4. Consensus on TSO(4)N with Reshaping
In this section, a consensus protocol is proposed on , the tangent bundle of . As an extension of the strategy in Section 3.1, the dynamics, which now include both kinetics and kinematics, become
where is now a state in addition to , and is the control input. The second equation in Equation (45) is analogous to Euler’s equation for rigid body motion in the case of .
4.1. Proposed Consensus Protocol on
Similar to the strategy proposed for in Section 3.1, the reshaped Lyapunov candidate function is proposed as
Using the relation , the derivative of Equation (46) becomes
Let represent the angular rate dyadic resolved into the inertial frame and denote the stacked vector of angular rate dyadics for all agents. The relation
is used to express the Lyapunov derivative, where is obtained in terms of the submatrices of as
In Equation (49), represents the cofactor matrix and is decomposed into submatrices as defined in Equation (31). The proposed consensus protocol in terms of the relative PRAs and angular rate dyadic resulting from Equation (52) becomes
where for at least one value of i and otherwise. The purpose of the last term in Equation (50) is to bring the angular rate tensors to zero. Equations (45) and (50) yield the reshaped closed loop given by
Furthermore, utilizing Equations (48) and (49), Equation (47) can now be expressed as
where . Since it was assumed that for at least one value of i, the matrix in Equation (52) is positive definite. The largest invariant set where the Lyapunov rate vanishes is . Hence, when for . However, no solution can stay in the set other than when the PRAs associated with the relative configuration are 0 or (corresponding to consensus or partial consensus equilibria) or for the case of non-consensus equilibria, because, to obtain , Equation (51) requires that for . As in consensus on , there are three possible classifications for the stability of equilibria when evaluating . Consensus equilibria corresponds to , implying that the relative configuration PRAs are for all pairs. Since this configuration represents the minimum in Equation (46), it is concluded that the consensus equilibrium with is locally asymptotically stable. Partial consensus equilibria can exist here as well, as in the case of for at least one pair for or 2 leading to an unstable set. Lastly, as in the case, non-consensus equilibria can exist when considering five-agent and nine-agent ring graphs, which will be demonstrated by simulation in the subsequent section. Reshaping is again used to destabilize existing non-consensus equilibria, successfully enlarging the region of attraction of the consensus manifold and possibly resulting in the AGAS stability of the consensus manifold. The local stability analysis in Section 3.2 must be used to support this claim.
4.2. Illustrative Examples
4.2.1. Initial Conditions near Consensus
Similarly to the case, feedback reshaping is used to demonstrate the destabilization of non-consensus equilibria. Again, an undirected ring graph with initial conditions in the non-consensus region of attraction is assessed for the base case, reshaping Case 1, and reshaping Case 2 on .
We now show simulations on that demonstrate the local stability of the consensus manifold using the base case protocol for the two ring graphs shown in Figure 1a,b. Figure 7 shows examples of the base case for both five- and nine-agent ring graphs achieving consensus. Similarly to the simulation results on , the absolute and relative PRAs show convergence to consensus equilibria. Additionally, the norms of are shown to converge towards zero. The following simulations will demonstrate that the same topologies with certain initial conditions result in convergence towards stable non-consensus equilibria.
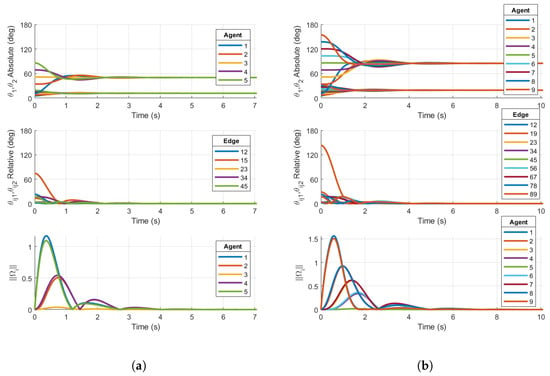
Figure 7.
Simulations on for (a) base case protocol on a 5-agent ring graph and (b) base case protocol on a 9-agent ring graph. Initial conditions are chosen within the region of attraction of the consensus manifold. Both plots demonstrate consensus.
4.2.2. Five-Agent Ring Graph with Initial Conditions Away from Consensus
Now, we reconsider the ring graph with the agent configuration in Section 3.3.2. The base case protocol has been simulated using the consensus protocol derived in Equation (50) and is shown in Figure 8a. The reshaping Case 1 () consensus protocol has been simulated for the protocol derived in Equation (50), with the appropriate coefficients. These results are shown in Figure 8b.
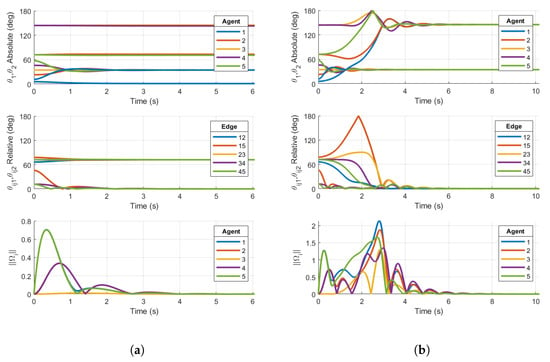
Figure 8.
Simulations on for (a) Base case protocol on a 5-agent ring graph and (b) Case 1 reshaping protocol with on a 5-agent ring graph. Initial conditions are chosen in the region of attraction of non-consensus equilibria. Right plot demonstrates consensus, while left plot does not.
The results in Figure 8a show that the closed loop using the base case consensus protocol converges to a stable, balanced non-consensus equilibrium. As in the simulation, there are two clusters of relative configurations denoted by relative PRAs , which converge towards and , driven to zero. Similarly to consensus on a circle, there are known stable equilibria on a ring graph [20] with agents at , relative rotation angles on the same axis.
Figure 8b shows the relative configurations converging to zero for both as desired. The two PRAs for each agent converge to the same steady-state limits, although they do not equal each other. As in the example, this is expected when not enforcing an isoclinic rotation. For the five-agent ring topology and initial conditions chosen, the reshaping Case 1 protocol achieves the desired outcome. The reshaping consensus protocol implemented in the simulation has destabilized the stable non-consensus equilibrium and resulted in the AGAS of the synchronized state.
4.2.3. Nine-Agent Ring Graph
Now, we reconsider the case of agents with the undirected ring graph in Figure 1b. Again, the initial conditions are as defined in Equation (44), and the simulation is conducted using the reshaping Case 1 and Case 2 protocols.
Similarly to the five-agent base case converging to non-consensus equilibria in Figure 8a, the nine-agent Case 1 reshaping fails to destabilize the non-consensus equilibria, resulting in a steady-state value of the relative PRA in Figure 9a. converges to the non-consensus equilibria just as in the five-agent base case. This is a result of . As described in Section 3.1, the reshaping algorithm fails to destabilize the non-consensus equilibria. Since stable non-consensus equilibria remain, the resulting configuration is only locally stable and not AGAS stable.
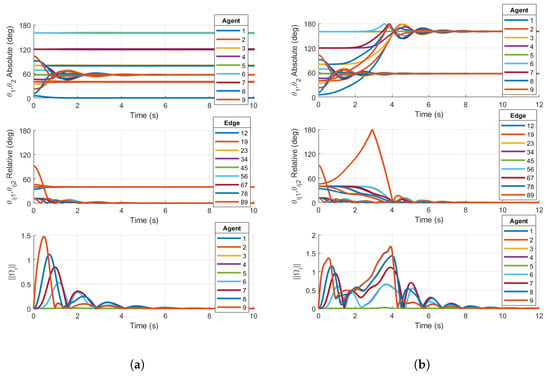
Figure 9.
Simulations on for (a) Case 1 reshaping protocol with on a 9-agent ring graph and (b) Case 2 reshaping protocol with on a 9-agent ring graph. Initial conditions are chosen in the region of attraction of non-consensus equilibria. Right plot demonstrates consensus, while left plot does not.
Reshaping Case 2 successfully destabilizes the non-consensus equilibria. Figure 9b shows all converging to zero, signifying that consensus has been achieved. This is expected since . The results of the nine-agent ring graph simulation confirm the conclusions in [20]. Case 2 reshaping was designed to destabilize non-consensus equilibria and ensure the almost global stability of the consensus subspace under a communication topology of a fixed number of agents N on , and this claim is justifiably extended to .
5. Conclusions
Lyapunov-based consensus protocols with reshaping for multi-agent systems on are leveraged and extended to multi-agent configuration synchronization on and . For synchronization with non-consensus equilibria, the reshaping strategy is used to destabilize these equilibria and produce configuration synchronization with almost global asymptotic stability. The control strategy using an approach based on a Morse–Bott–Lyapunov function is supported by numerical simulations of an undirected, ring communication graph and a ring lattice. The presented simulations confirm the proposed advantages of Case 1 and Case 2 reshaping on and synchronization by destabilizing stable non-consensus equilibria to achieve AGAS on the consensus manifolds and .
The illustrative examples used to demonstrate how reshaping destabilizes non-consensus equilibria are limited to ring graphs and ring lattices. These are only a subset of the set of circulant networks. The Kuramoto model [21] can be considered as an analog of the consensus protocols on and [20]. Specifically, the single-integrator Kuramoto model corresponds to kinematics-level control on and the double-integrator Kuramoto model corresponds to . The Kuramoto model is analyzed in [21] for circulant networks, and it is proven that there exists an upper bound on connectivity for which at least one non-consensus equilibrium is locally stable for circulant networks. Meanwhile, [30] shows that, for ring lattices, this upper bound is . Thus, for a nine-node ring lattice with , the consensus manifold is AGAS stable without the need for reshaping, since and in Equation (2). Similarly, for any complete graph with , the consensus manifold is globally stable. As shown in Section 3.3.4, increased connectivity reduces the order of reshaping required for the nine-agent ring lattice, where Case 1, as opposed to Case 2, in the nine-agent ring graph example is sufficient in achieving consensus. Based on this observation, it can be conjectured that, if a network has a subgraph consisting of a ring graph or ring lattice on N nodes, then a reshaping strategy with can be developed such that almost global stability for the synchronization manifold is guaranteed.
Author Contributions
Conceptualization, E.A.B.; Methodology, E.A.B. and V.S.; Software, V.S.; Writing—original draft, V.S.; Writing—review & editing, E.A.B. All authors have read and agreed to the published version of the manuscript.
Funding
This research was sponsored by the Army Research Office and was accomplished under Grant Number W911NF-23-1-0155. The views and conclusions contained in this document are those of the authors and should not be interpreted as representing the official policies, either expressed or implied, of the Army Research Office or the U.S. Government. The U.S. Government is authorized to reproduce and distribute reprints for government purposes notwithstanding any copyright notation herein.
Institutional Review Board Statement
Not applicable.
Data Availability Statement
Data is contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Sarlette, A.; Sepulchre, R. Consensus Optimization on Manifolds. SIAM J. Control Optim. 2009, 48, 56–76. [Google Scholar] [CrossRef]
- Sepulchre, R. Consensus on nonlinear spaces. Annu. Rev. Control 2011, 35, 56–64. [Google Scholar] [CrossRef]
- Saber, R.; Murray, R. Consensus protocols for networks of dynamic agents. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; Volume 2. [Google Scholar] [CrossRef]
- Crnkic, A.; Jacimovic, V. Consensus and balancing on the three-sphere. J. Glob. Optim. 2020, 76, 575–586. [Google Scholar] [CrossRef]
- Liu, B. Consensus-Based Distributed Machine Learning: Theory, Algorithms, and Applications. Ph.D. Thesis, University of Manchester, Manchester, UK, 2021; p. AAI29216577. [Google Scholar]
- Kong, L.; Lin, T.; Koloskova, A.; Jaggi, M.; Stich, S. Consensus Control for Decentralized Deep Learning. arXiv 2021, arXiv:2102.04828. [Google Scholar] [CrossRef]
- Magureanu, H.; Usher, N. Consensus learning: A novel decentralised ensemble learning paradigm. arXiv 2024, arXiv:2402.16157. [Google Scholar] [CrossRef]
- James, S.; Abbeel, P. Bingham Policy Parameterization for 3D Rotations in Reinforcement Learning. arXiv 2022, arXiv:2202.03957. [Google Scholar] [CrossRef]
- Zhou, Y.; Barnes, C.; Lu, J.; Yang, J.; Li, H. On the Continuity of Rotation Representations in Neural Networks. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 5738–5746. [Google Scholar] [CrossRef]
- Chaturvedi, N.A.; Sanyal, A.K.; McClamroch, N.H. Rigid-Body Attitude Control. IEEE Control Syst. Mag. 2011, 31, 30–51. [Google Scholar] [CrossRef]
- Matni, N.; Horowitz, M. A convex approach to consensus on SO(n). In Proceedings of the 2014 52nd Annual Allerton Conference on Communication, Control, and Computing (Allerton), Monticello, IL, USA, 30 September–3 October 2014. [Google Scholar] [CrossRef]
- Lageman, C.; Sarlette, A.; Sepulchre, R. Synchronization with partial state feedback on SO(n). In Proceedings of the 48 h IEEE Conference on Decision and Control (CDC) Held Jointly with 2009 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009. [Google Scholar] [CrossRef]
- Sarlette, A.; Bonnabel, S.; Sepulchre, R. Coordinated Motion Design on Lie Groups. IEEE Trans. Autom. Control 2010, 55, 1047–1058. [Google Scholar] [CrossRef]
- Markdahl, J.; Thunberg, J.; Hoppe, J.; Hu, X. Analytical solutions to feedback systems on the special orthogonal group SO(n). In Proceedings of the 52nd IEEE Conference on Decision and Control, Firenze, Italy, 10–13 December 2013; pp. 5246–5251. [Google Scholar] [CrossRef]
- Markdahl, J.; Hu, X. Exact solutions to a class of feedback systems on SO(n). Automatica 2016, 63, 138–147. [Google Scholar] [CrossRef]
- Butcher, E.; Mathavaraj, S. Multi-Agent Spacecraft Attitude Formation and Tracking Control using Reshaping. J. Astronaut. Sci. 2025, 72, 5. [Google Scholar] [CrossRef]
- Butcher, E. Stabilization of Consensus and Balanced Configurations on the Circle with Ring Topology and Heterogeneous Input Delays. IFAC-PapersOnLine 2022, 55, 151–156. [Google Scholar] [CrossRef]
- Maadani, M.; Butcher, E. Pose consensus control of multi-agent rigid body systems with homogenous and heterogeneous communication delays. Int. J. Robust Nonlinear Control 2022, 32, 3714–3736. [Google Scholar] [CrossRef]
- Maadani, M.; Butcher, E. 6-DOF consensus control of multi-agent rigid body systems using rotation matrices. Int. J. Control 2021, 95, 2667–2681. [Google Scholar] [CrossRef]
- Mathavaraj, S.; Butcher, E. Rigid-Body Attitude Control, Synchronization, and Bipartite Consensus Using Feedback Reshaping. J. Guid. Control Dyn. 2023, 46, 1095–1111. [Google Scholar] [CrossRef]
- Townsend, A.; Stillman, M.; Strogatz, S.H. Dense networks that do not synchronize and sparse ones that do. Chaos Interdiscip. J. Nonlinear Sci. 2020, 30, 083142. [Google Scholar] [CrossRef]
- Trenkler, G.; Trenkler, D. The Vector Cross Product and 4 × 4 Skew-Symmetric Matrices; Physica-Verlag HD: Heidelberg, Germany, 2008; pp. 95–104. [Google Scholar] [CrossRef]
- Politi, T. A Formula for the Exponential of a Real Skew-Symmetric Matrix of Order 4. BIT Numer. Math. 2001, 41, 842–845. [Google Scholar] [CrossRef]
- Mortari, D. On the Rigid Rotation Concept in n-Dimensional Spaces. J. Astronaut. Sci. 2001, 49, 401–420. [Google Scholar] [CrossRef]
- Erdoğdu, M.; Özdemir, M. Simple, Double and Isoclinic Rotations with Applications. Math. Sci. Appl. E-Notes 2020, 8, 11–24. [Google Scholar] [CrossRef][Green Version]
- Perez-Gracia, A.; Thomas, F. On Cayley’s Factorization of 4D Rotations and Applications. Adv. Appl. Clifford Algebr. 2017, 27, 523–538. [Google Scholar] [CrossRef]
- Bar-Itzhack, I.; Markley, F. Minimal parameter solution of the orthogonal matrix differential equation. IEEE Trans. Autom. Control 1990, 35, 314–317. [Google Scholar] [CrossRef]
- Altafini, C. Consensus Problems on Networks with Antagonistic Interactions. IEEE Trans. Autom. Control 2013, 58, 935–946. [Google Scholar] [CrossRef]
- Butcher, E.A.; Maadani, M. Rigid Body Attitude Cluster Consensus Control on Weighted Cooperative-Competitive Networks. In Proceedings of the 2024 American Control Conference (ACC), Toronto, ON, Canada, 10–12 July 2024; pp. 3049–3054. [Google Scholar] [CrossRef]
- Canale, E.A.; Monzón, P. Exotic equilibria of Harary graphs and a new minimum degree lower bound for synchronization. Chaos Interdiscip. J. Nonlinear Sci. 2015, 25, 023106. [Google Scholar] [CrossRef] [PubMed]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).