
Research on Registration Methods for Coupled Errors in Maneuvering Platforms


Abstract
1. Introduction
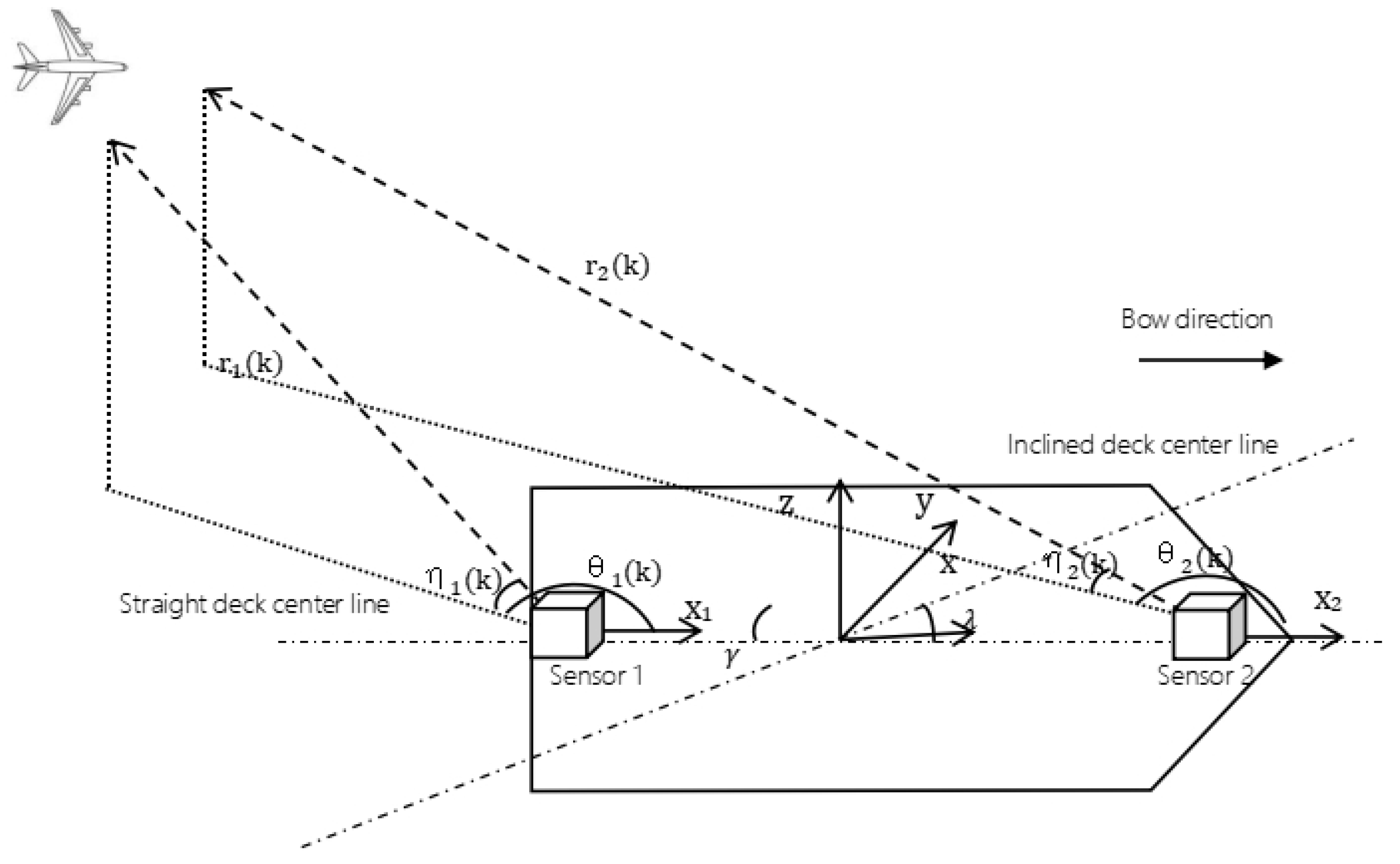
2. System Description
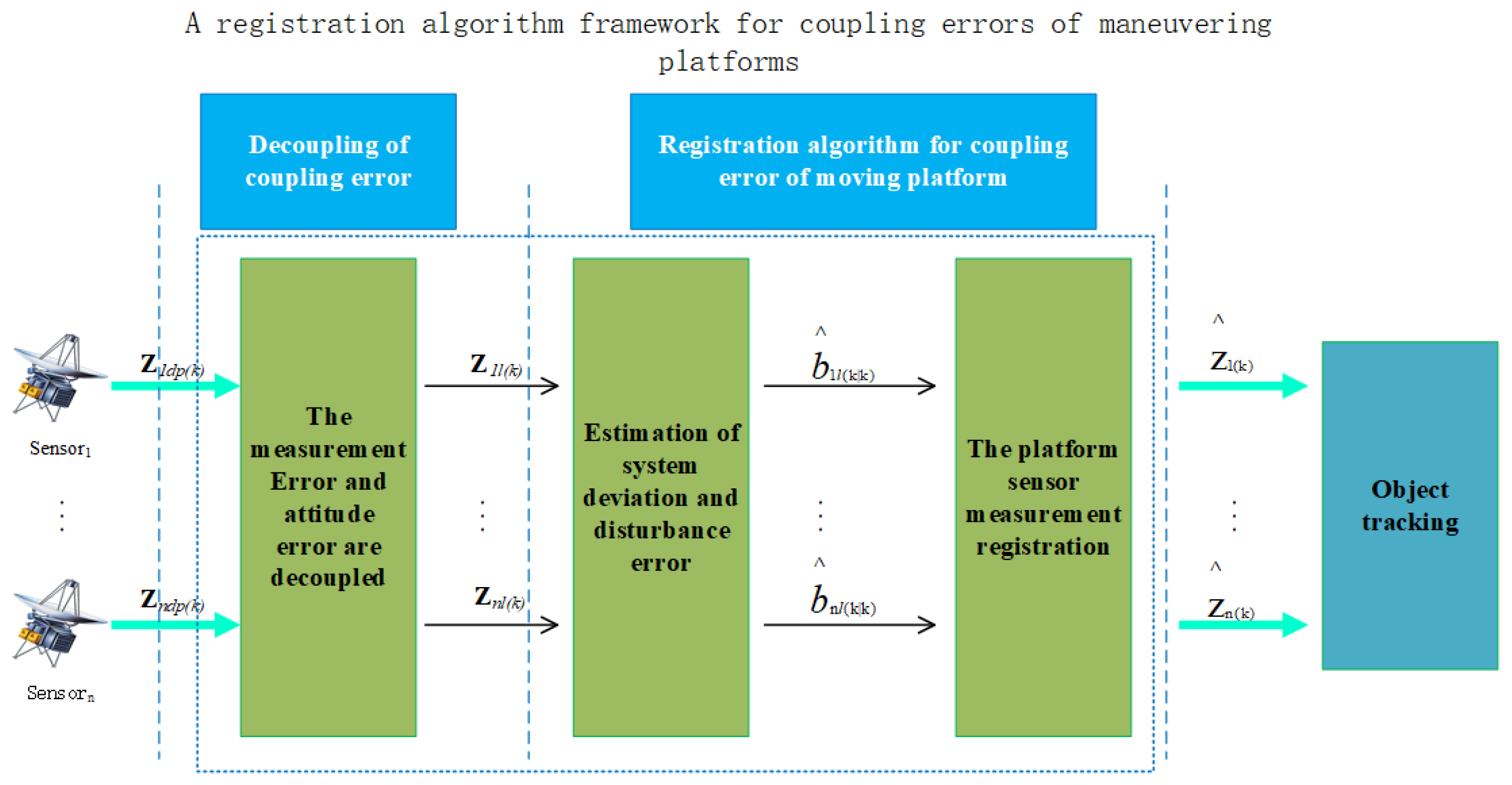
3. Registration Algorithm for Coupling Error of Mobile Platform
3.1. Decoupling of Coupling Errors
3.2. Registration of the Registration Algorithm Based on the Coupling Error of the Maneuvering Platform
3.2.1. Joint Estimation of System Bias and Disturbance Error Based on Pseudo-Measurement
3.2.2. Measurement Registration
3.3. Algorithm Implementation
| Algorithm 1 Pseudocode of the algorithm |
| Input:
Output:
|
4. Simulation and Analysis
4.1. Simulation Parameters
4.2. Performance Metrics
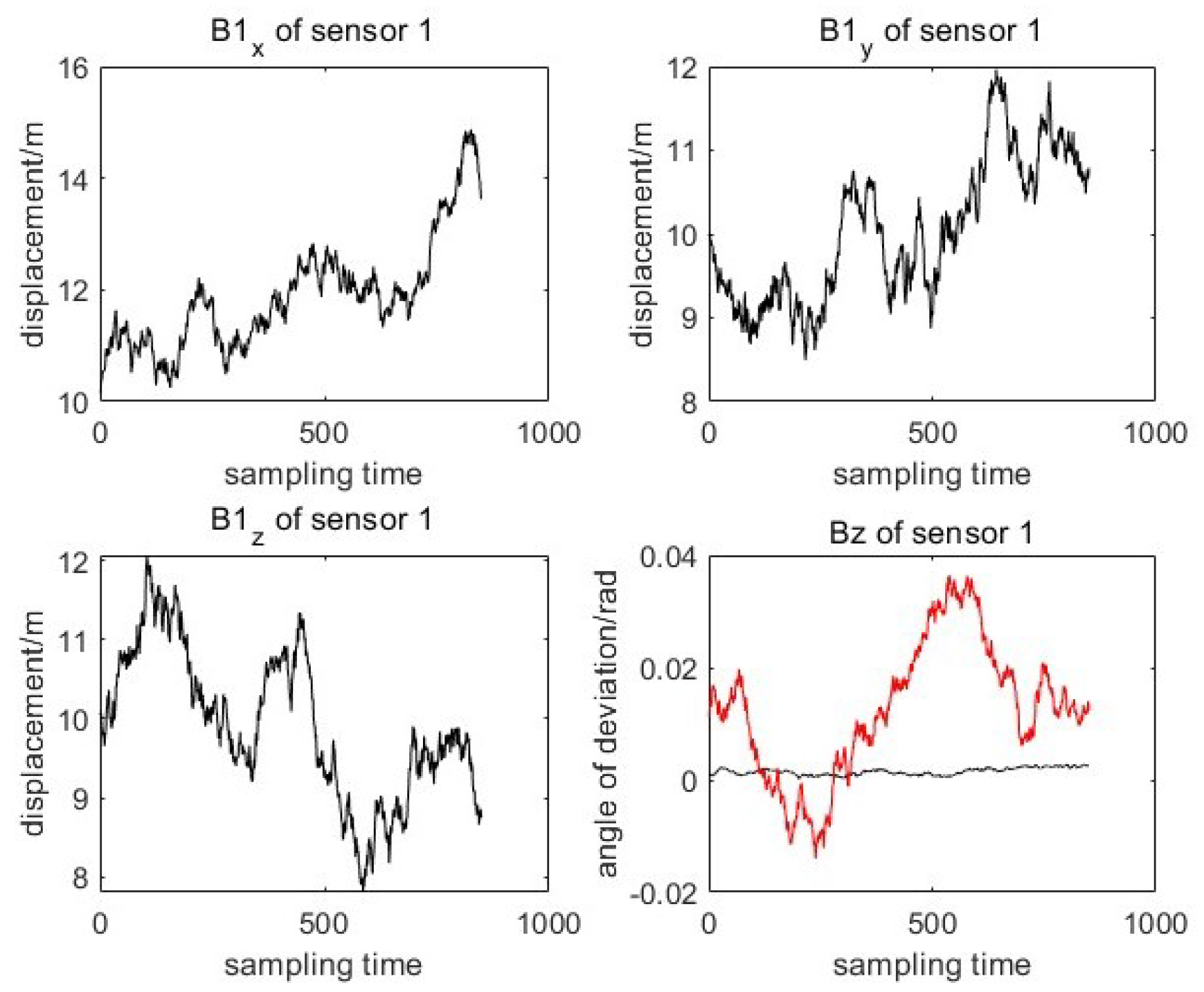
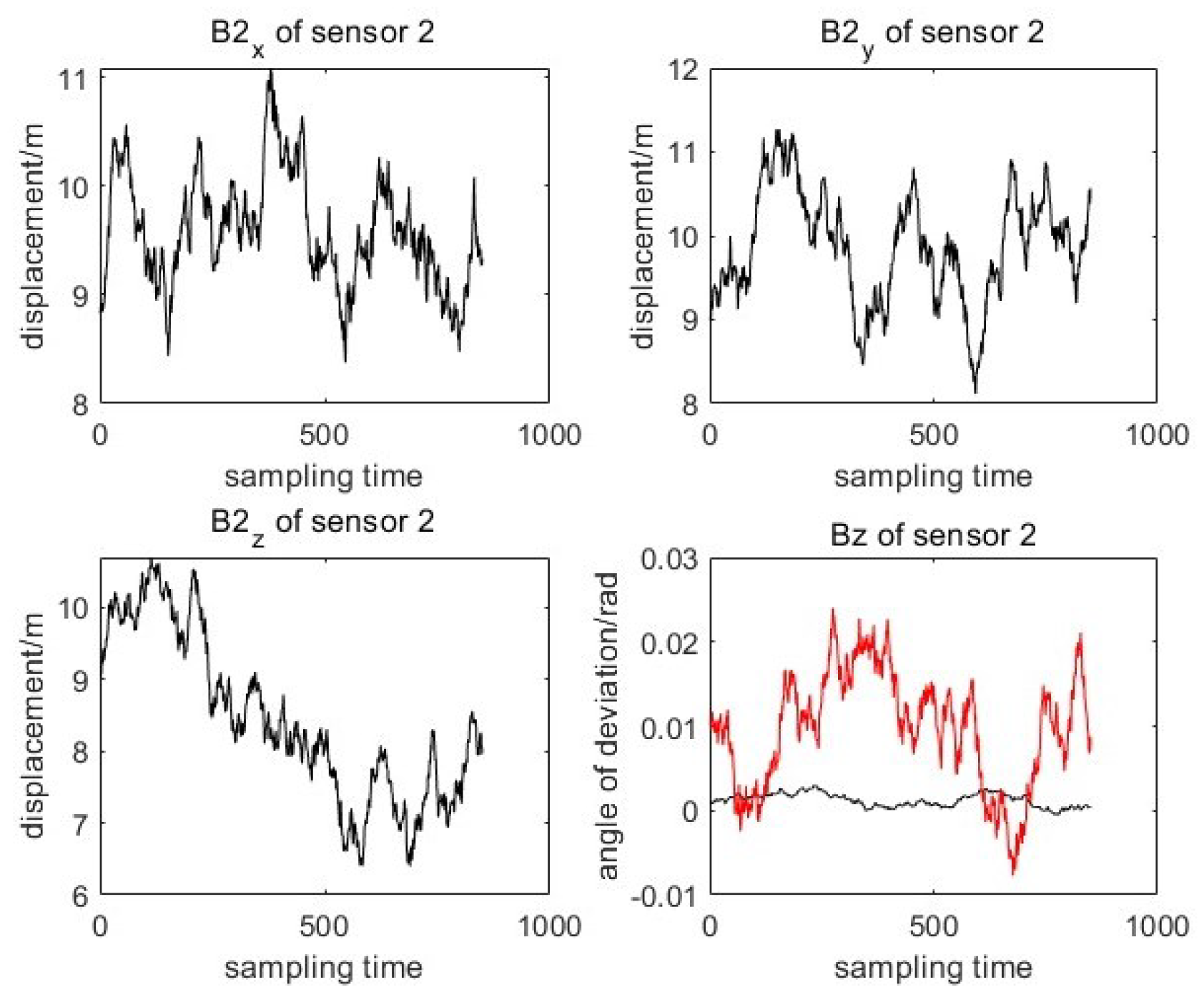
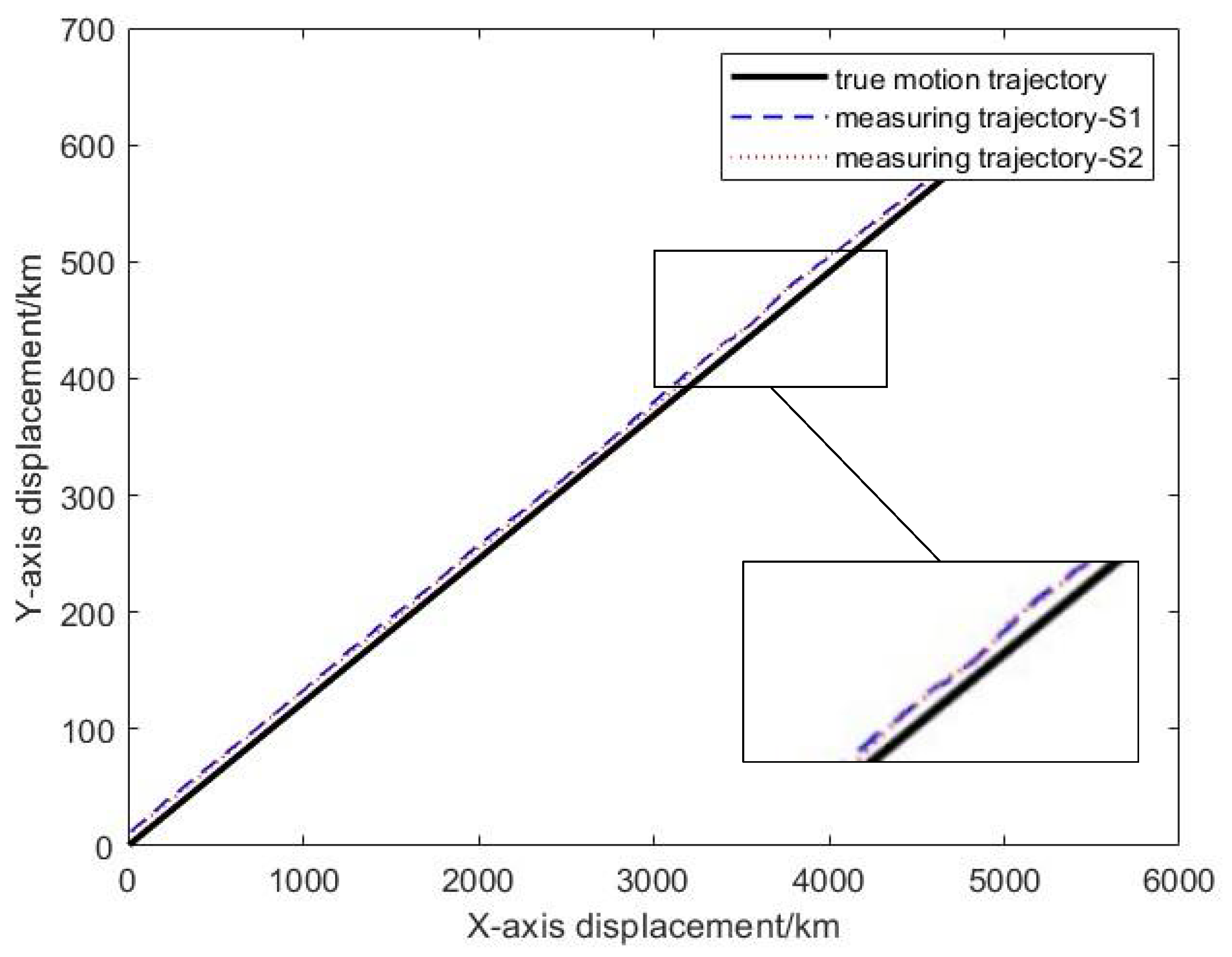
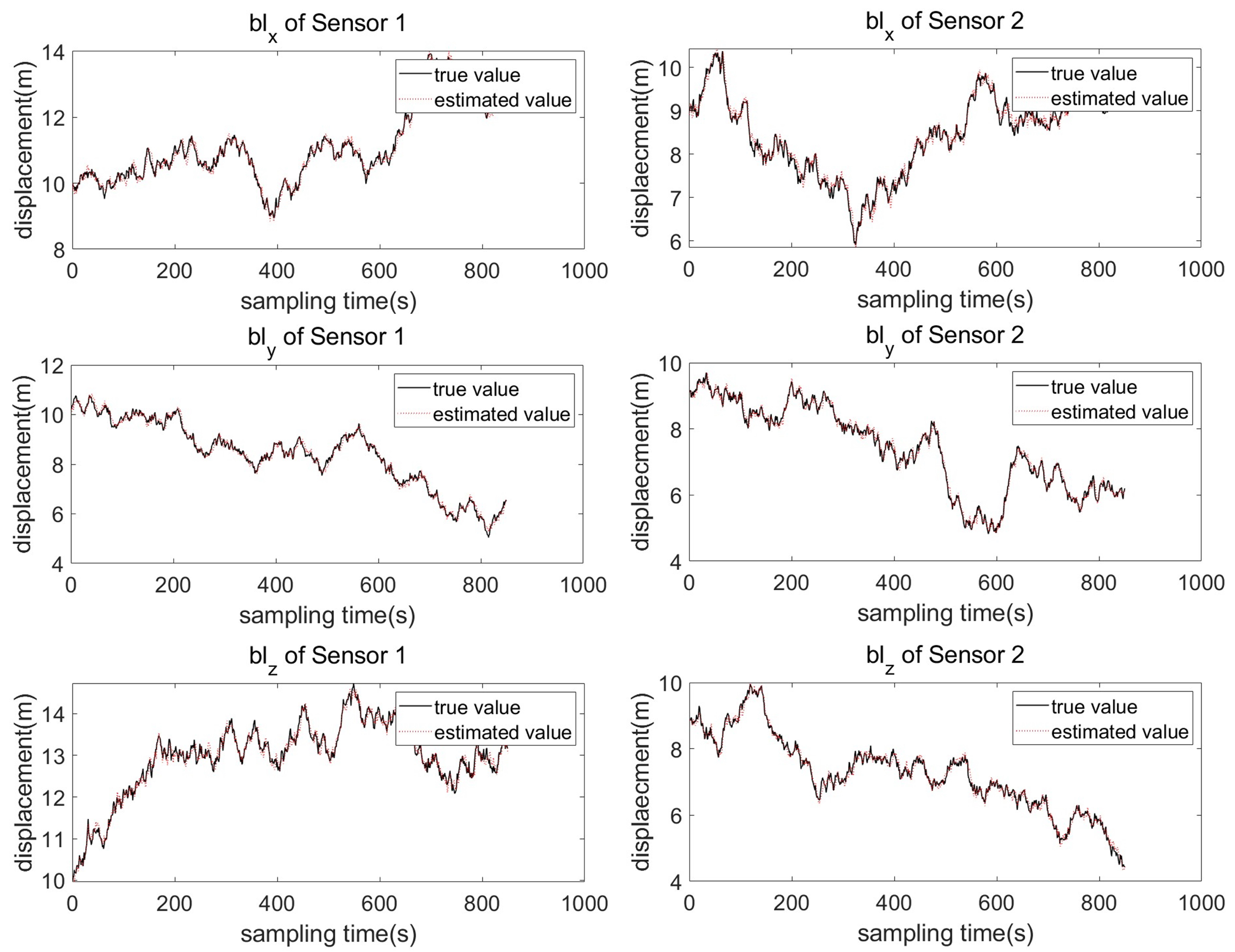
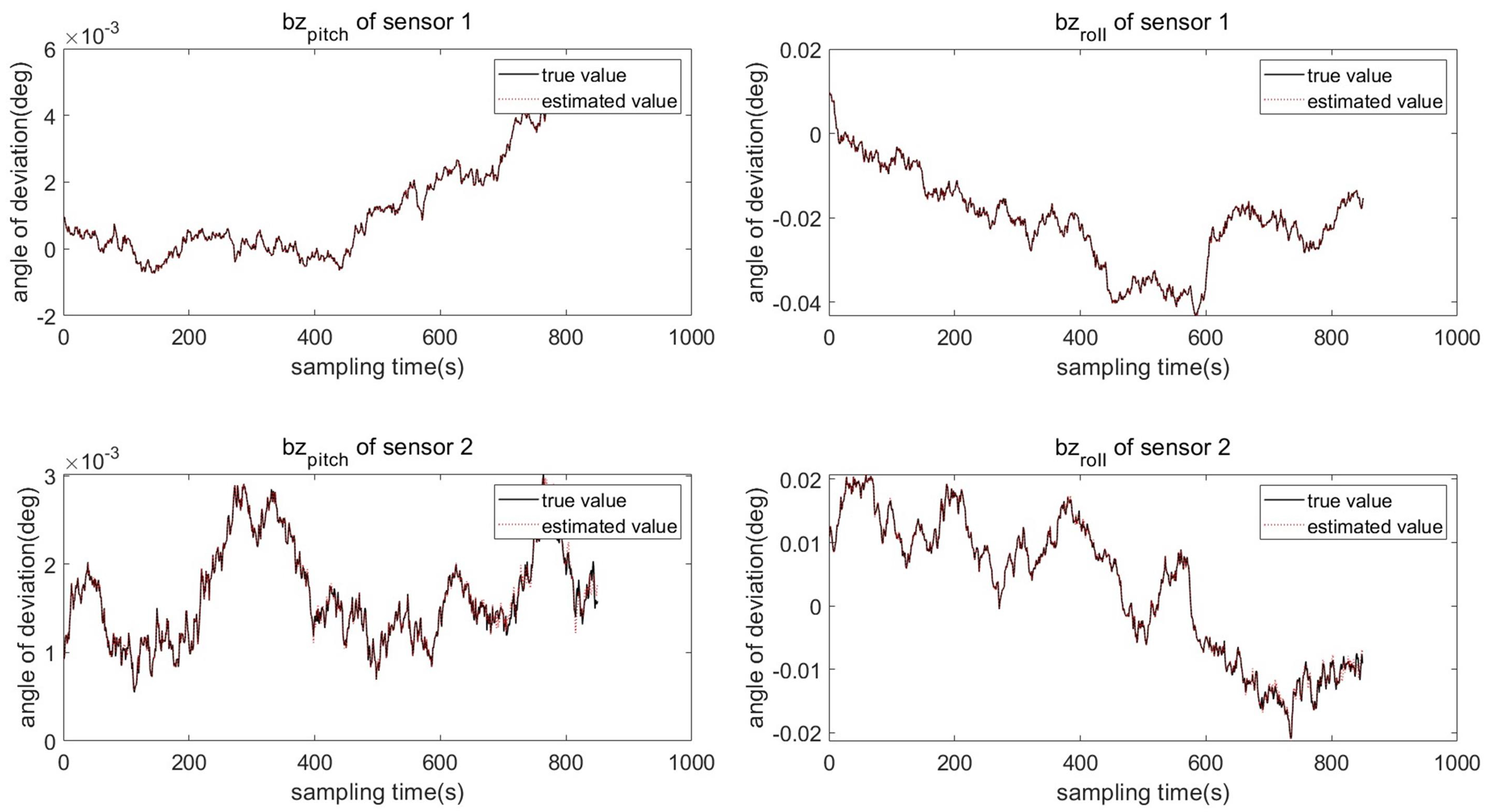
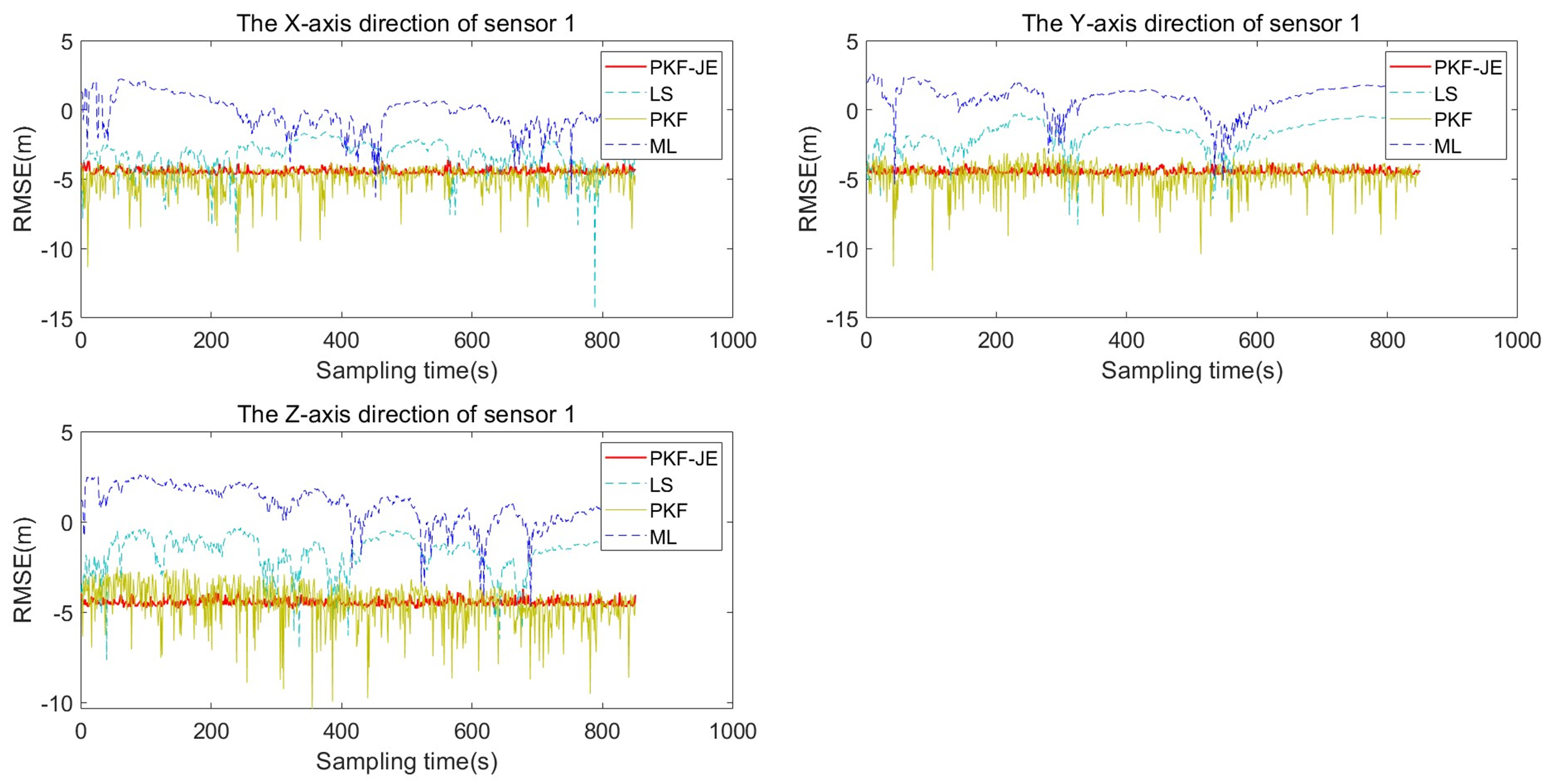
4.3. Results and Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Yoon, K.; Choi, J.; Huh, K. Adaptive decentralized sensor fusion for autonomous vehicle: Estimating the position of surrounding vehicles. IEEE Access 2023, 11, 90999–91008. [Google Scholar] [CrossRef]
- Karle, P.; Fent, F.; Huch, S.; Sauerbeck, F.; Lienkamp, M. Multi-modal sensor fusion and object tracking for autonomous racing. IEEE Trans. Intell. Veh. 2023, 8, 3871–3883. [Google Scholar] [CrossRef]
- Harindranath, A.; Arora, M. Effect of sensor noise characteristics and calibration errors on the choice of IMU-sensor fusion algorithms. Sens. Actuators A Phys. 2024, 379, 115850. [Google Scholar] [CrossRef]
- Hu, G.; Xu, L.; Gao, B.; Chang, L.; Zhong, Y. Robust unscented Kalman filter-based decentralized multisensor information fusion for INS/GNSS/CNS integration in hypersonic vehicle navigation. IEEE Trans. Instrum. Meas. 2023, 72, 1–11. [Google Scholar] [CrossRef]
- Khan, F.M.; Rahman, T.; Zeb, A.; Haider, Z.A.; Khan, I.U.; Bilal, H.; Khan, M.A.; Ullah, I. Vehicular Network Security Through Optimized Deep Learning Model with Feature Selection Techniques. IECE Trans. Sens. Commun. Control 2024, 1, 136–153. [Google Scholar] [CrossRef]
- Ren, H.; Wang, Y.; Ma, H. Deep prediction network based on covariance intersection fusion for sensor data. IECE Trans. Intell. Syst. 2024, 1, 10–18. [Google Scholar] [CrossRef]
- Ding, W.; Jiang, Y.; Lyu, Z.; Liu, B.; Gao, Y. Improved attitude estimation accuracy by data fusion of a MEMS MARG sensor and a low-cost GNSS receiver. Measurement 2022, 194, 111019. [Google Scholar] [CrossRef]
- Rhode, S.; Usevich, K.; Markovsky, I.; Gauterin, F. A recursive restricted total least-squares algorithm. IEEE Trans. Signal Process. 2014, 62, 5652–5662. [Google Scholar] [CrossRef]
- Zhou, Y.; Leung, H.; Blanchette, M. Sensor alignment with earth-centered earth-fixed (ECEF) coordinate system. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 410–418. [Google Scholar] [CrossRef]
- Yaqi, C.; Wei, X.; You, H.; Runze, L. Mobile sensor registration in ECEF coordinates using the MLR algorithm. In Proceedings of the 2011 IEEE CIE International Conference on Radar, Chengdu, China, 24–27 October 2011; Volume 2, pp. 1784–1787. [Google Scholar]
- Okello, N.; Ristic, B. Maximum likelihood registration for multiple dissimilar sensors. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1074–1083. [Google Scholar] [CrossRef]
- Burke, J. The SAGE real time quality control function and its interface with BUIC II/BUIC III. MITRE Corp. Tech. Rep. 1996, 308, 102–105. [Google Scholar]
- Ge, Q.; Chen, T.; Duan, Z.; Liu, M.; Niu, Z. Relative sensor registration with two-step method for state estimation. Cogn. Comput. Syst. 2019, 1, 45–54. [Google Scholar] [CrossRef]
- Cui, Y.; Xiong, W.; He, Y. Mobile Platform Sensor Registration Algorithm Based on MLR. Acta Aeronaut. Astronaut. Sin. 2012, 33, 118–128. [Google Scholar]
- Wang, G.; Chen, L.; Jia, S.; Progri, I. Optimized bias estimation model for mobile radar error registration. J. Navig. 2013, 66, 227–248. [Google Scholar] [CrossRef]
- Zeng, Y.; Wang, J.; Wei, S.; Sun, J.; Lei, P.; Savaria, Y.; Zhang, C. Spatial Registration of Heterogeneous Sensors on Mobile Platforms. IEEE Trans. Signal Process. 2024, 72, 1839–1853. [Google Scholar] [CrossRef]
- Ma, W.; Luo, J.; Wang, M.; Yang, B. Space Relative Navigation Filter Based On-Board Radar Observation. In Proceedings of the 2009 2nd International Congress on Image and Signal Processing, Tianjin, China, 17–19 October 2009; pp. 1–5. [Google Scholar]
- Pan, J.H. Robust least-squares bias estimation for radar detecting biases and attitude biases. In Proceedings of the 2013 2nd International Conference on Measurement, Information and Control, Harbin, China, 16–18 August 2013; Volume 1, pp. 107–110. [Google Scholar]
- Hu, G.; Gao, B.; Zhong, Y.; Ni, L.; Gu, C. Robust unscented Kalman filtering with measurement error detection for tightly coupled INS/GNSS integration in hypersonic vehicle navigation. IEEE Access 2019, 7, 151409–151421. [Google Scholar] [CrossRef]
- Gao, G.; Gao, B.; Gao, S.; Hu, G.; Zhong, Y. A hypothesis test-constrained robust Kalman filter for INS/GNSS integration with abnormal measurement. IEEE Trans. Veh. Technol. 2022, 72, 1662–1673. [Google Scholar] [CrossRef]
- Zhang, J. Research on Estimation Methods of System Bias and Unknown Disturbance in Complex Environments. Master’s Thesis, Henan University, Kaifeng, China, 2018. (In Chinese). [Google Scholar]
- Xiao, Y.; Jiang, T.; Fan, G.W.; Zhang, L.; Gao, Y.; Zhang, L. A meticulous covariance adaptive Kalman filter for satellite attitude estimation. Meas. Sci. Technol. 2024, 35, 045104. [Google Scholar] [CrossRef]
- Ueng, S.K.; Lin, D.; Liu, C.H. A ship motion simulation system. Virtual Real. 2008, 12, 65–76. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | |||
|---|---|---|---|
| 0.01 | 0.001 | 1 | |
| 0.013 | 0.0013 | 0.95 |
| PKF-JE | 0.0123 | 0.0122 | 0.0123 | 0.0123 | 0.0127 | 0.0123 |
| PKF | 0.0126 | 0.0162 | 0.0123 | 0.0130 | 0.0168 | 0.0290 |
| LS | 0.0852 | 0.2413 | 0.2534 | 0.0891 | 0.3414 | 0.4340 |
| ML | 0.1131 | 0.4351 | 0.3752 | 0.1103 | 0.5135 | 0.6342 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Q.; Liu, R.; Liu, Y.; Wei, Z. Research on Registration Methods for Coupled Errors in Maneuvering Platforms. Entropy 2025, 27, 607. https://doi.org/10.3390/e27060607
Li Q, Liu R, Liu Y, Wei Z. Research on Registration Methods for Coupled Errors in Maneuvering Platforms. Entropy. 2025; 27(6):607. https://doi.org/10.3390/e27060607
Chicago/Turabian StyleLi, Qiang, Ruidong Liu, Yalei Liu, and Zhenzhong Wei. 2025. "Research on Registration Methods for Coupled Errors in Maneuvering Platforms" Entropy 27, no. 6: 607. https://doi.org/10.3390/e27060607
APA StyleLi, Q., Liu, R., Liu, Y., & Wei, Z. (2025). Research on Registration Methods for Coupled Errors in Maneuvering Platforms. Entropy, 27(6), 607. https://doi.org/10.3390/e27060607