

A Novel Entropy-Based Approach for Thermal Image Segmentation Using Multilevel Thresholding





Abstract
1. Introduction
- Image enhancement techniques specifically designed for TIR images improve visibility and contrast in regions of interest. These methods emphasize the thermal signatures of objects, such as humans or animals, making them more distinguishable from the background. This step is essential for enhancing the performance of subsequent segmentation processes.
- An innovative entropy-based segmentation technique tailored for TIR images is presented. The proposed method employs advanced entropy measures to determine the optimal multilevel threshold, enabling more precise separation of foreground and background regions, even in challenging, low-contrast TIR images.
2. Background
2.1. Entropy in Image Segmentation
2.2. Thresholding Techniques and Challenges
- Identify optimal threshold values that maximize segmentation accuracy;
- Decrease computational complexity compared to exhaustive search methods;
- Prevent getting trapped in local optima in a complex fitness landscape;
- Address multi-dimensional optimization problems involving multiple thresholds.
2.2.1. Bilevel vs. Multilevel Thresholding
2.2.2. Limitations in Thermal Infrared (TIR) Imaging
2.3. A-Entropy
2.3.1. Block-Based Probability Density Functions (BPDFs)
2.3.2. Monotonic Properties
3. Proposed Method
3.1. Entropy-Based Image Segmentation with Adaptive Gamma Correction
| Algorithm 1: Entropy-based multilevel thresholds. |
| Input: . . Output: . |
refers to the Dirac delta function. . is a constant. . Do Do For … Do segments: . Compute the total entropy for the current threshold: End End End End |
| Algorithm 2: Iterative multilevel thresholding image segmentation. |
| Input: . . Output: . |
| . . . |
3.2. Adaptive Image Enhancement
4. Computer Simulation Results and Discussion
4.1. Databases
4.2. Objective Results
4.2.1. Metric Descriptions
4.2.2. Performance Analysis
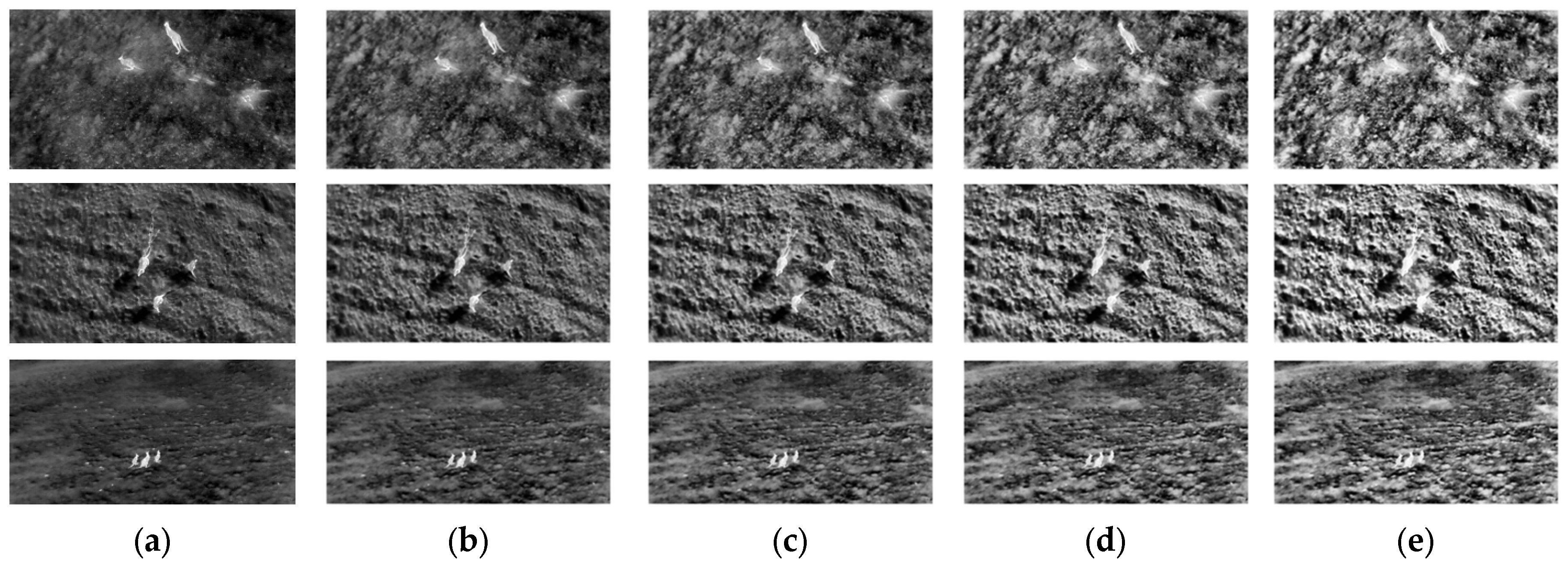
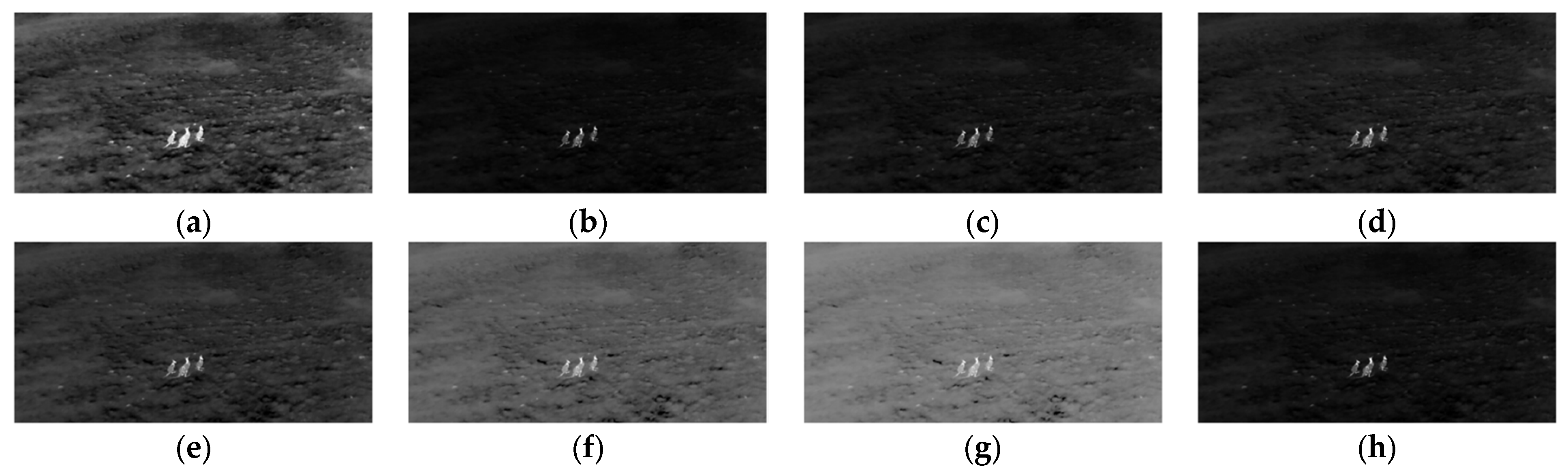
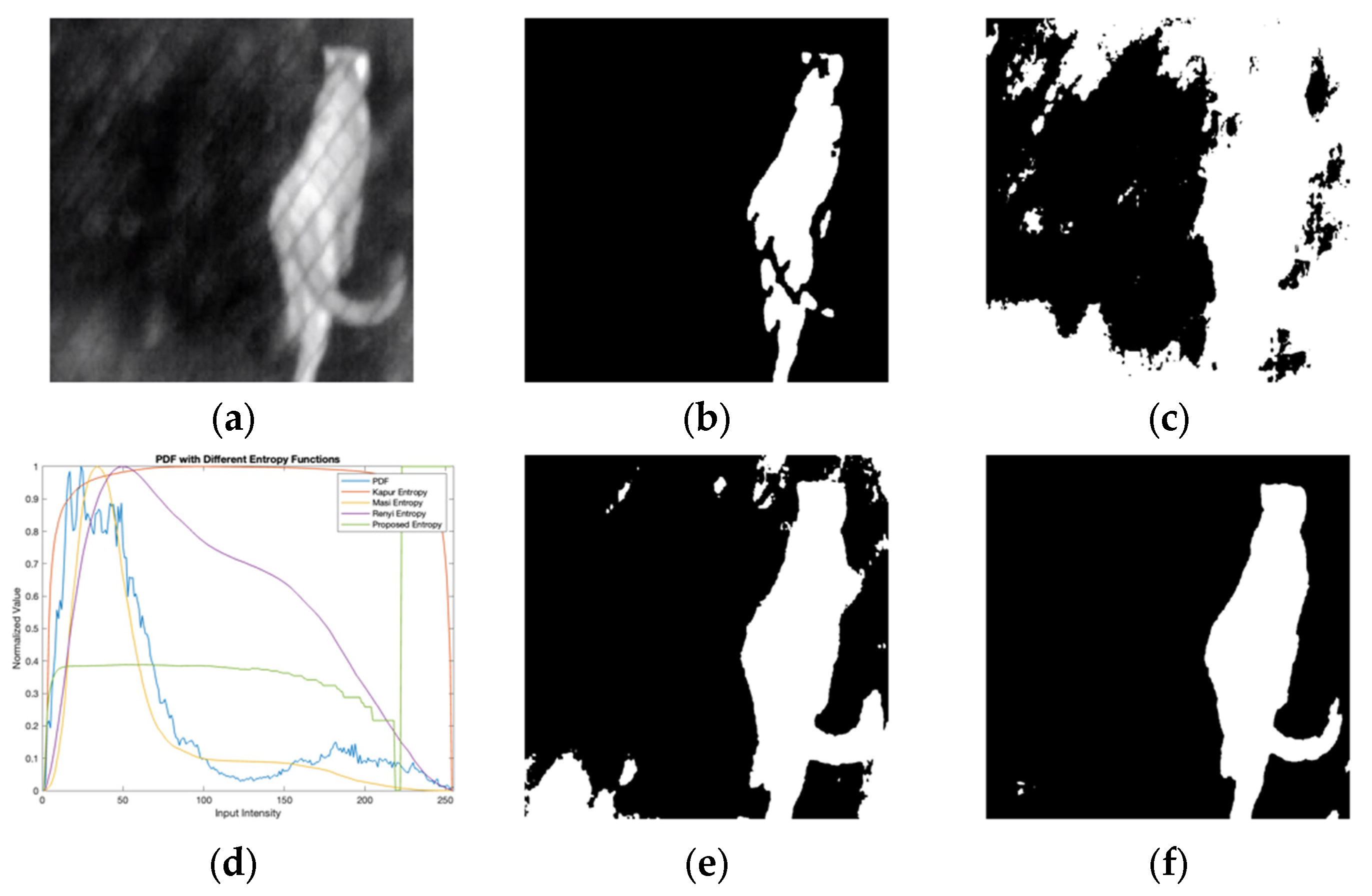
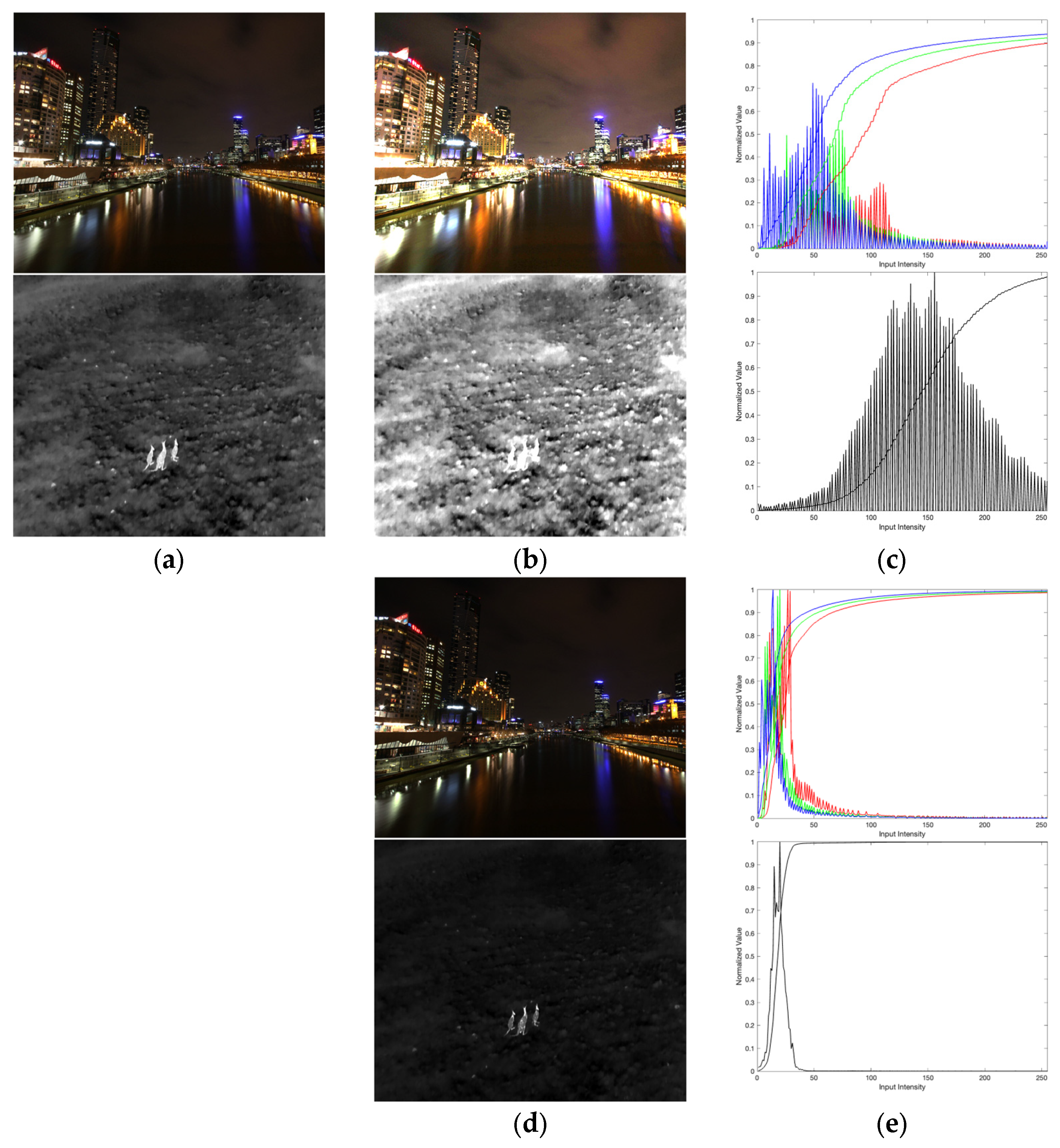
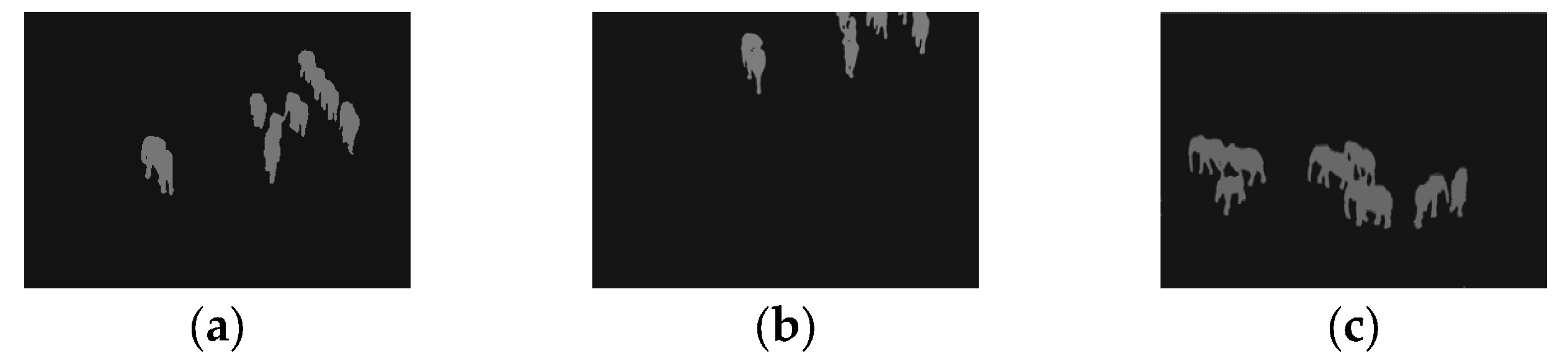
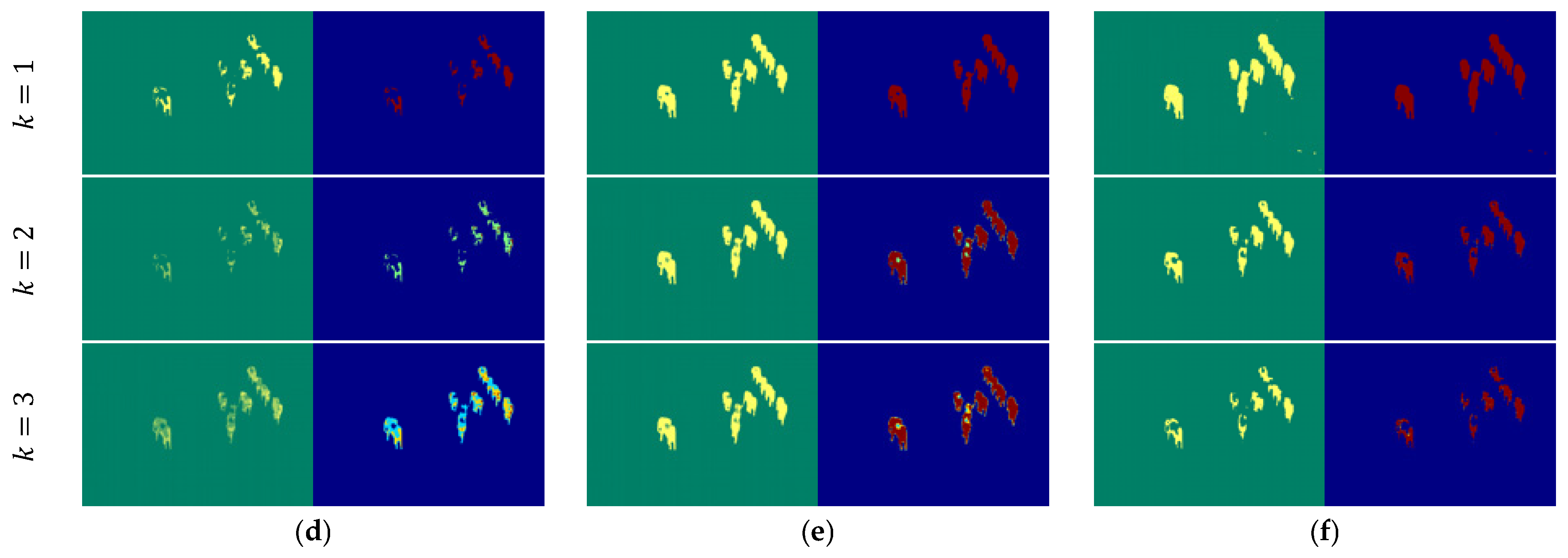
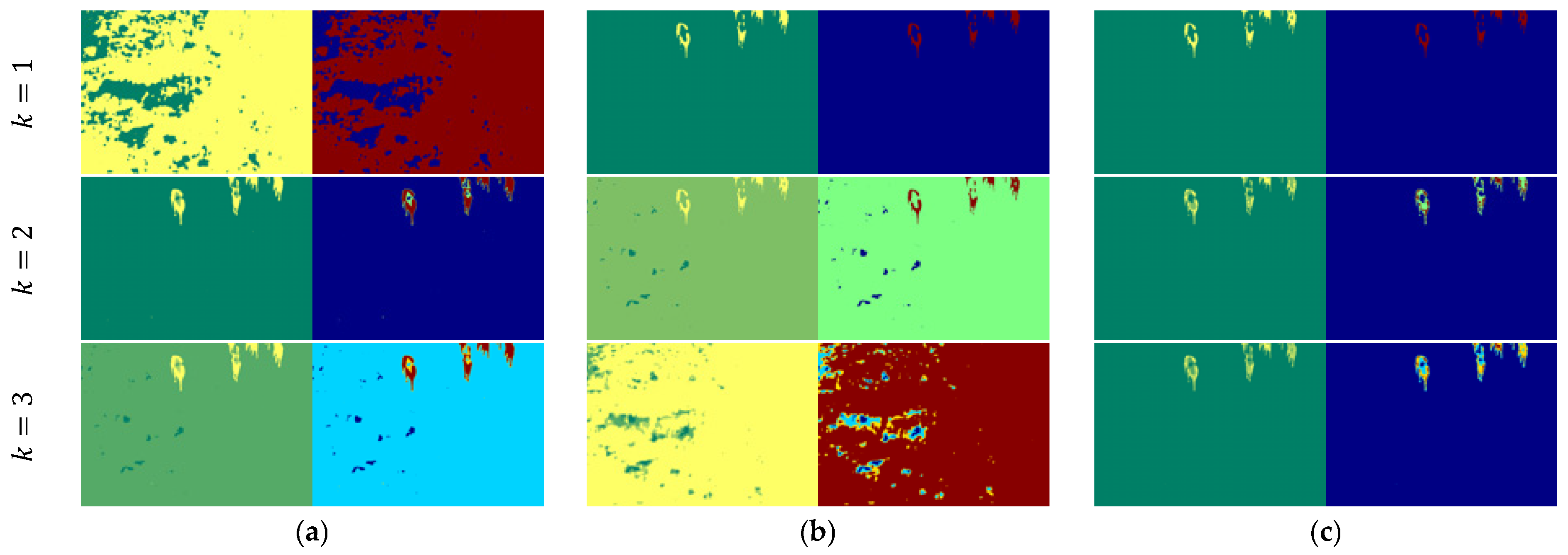
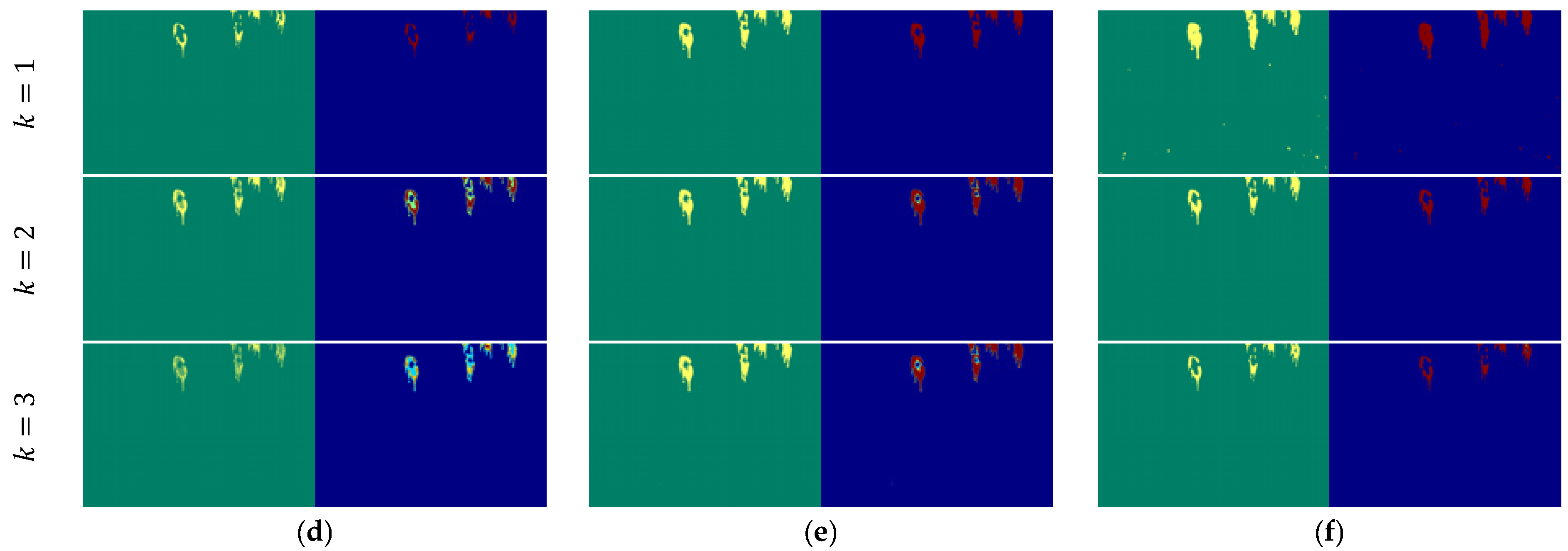
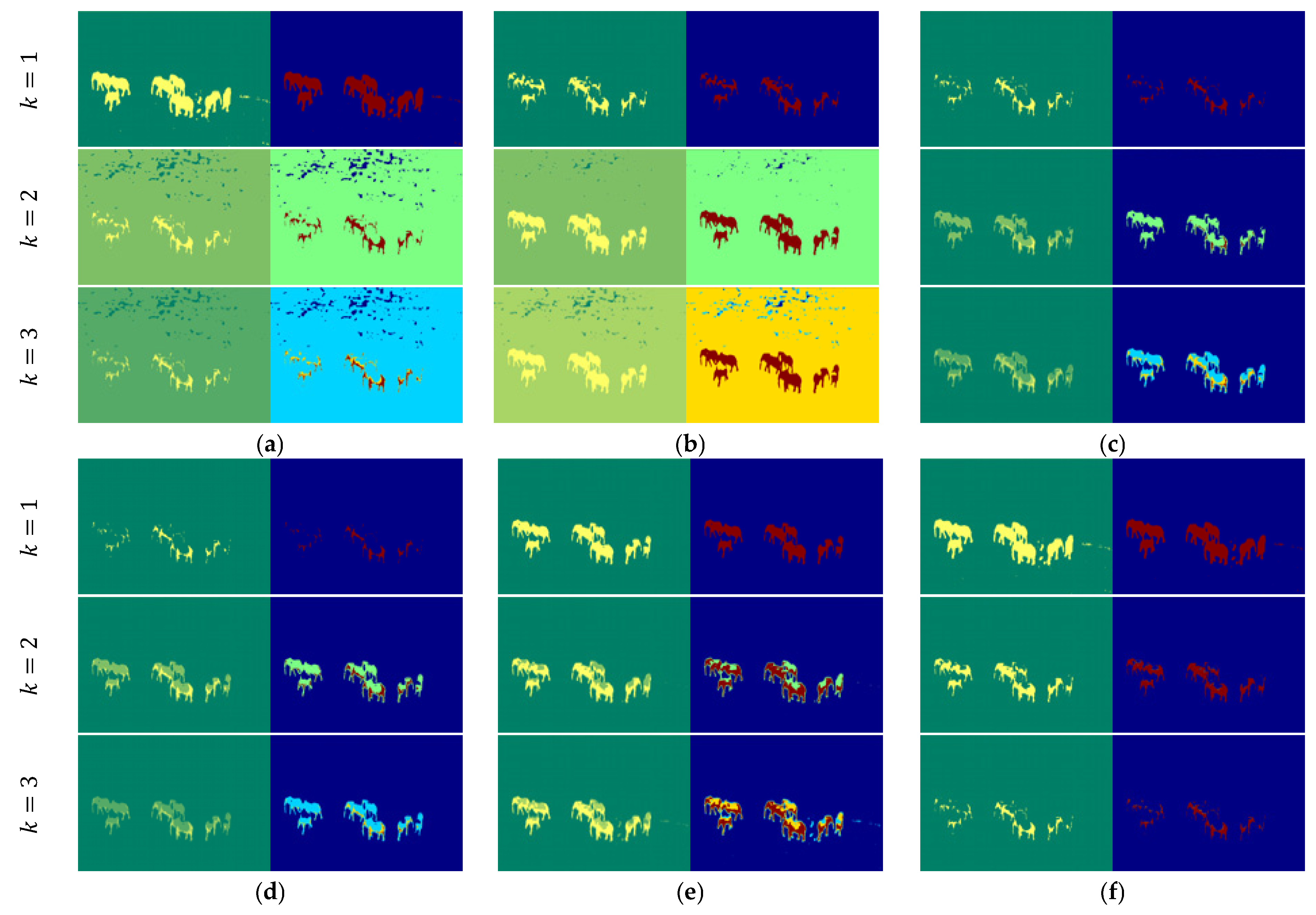
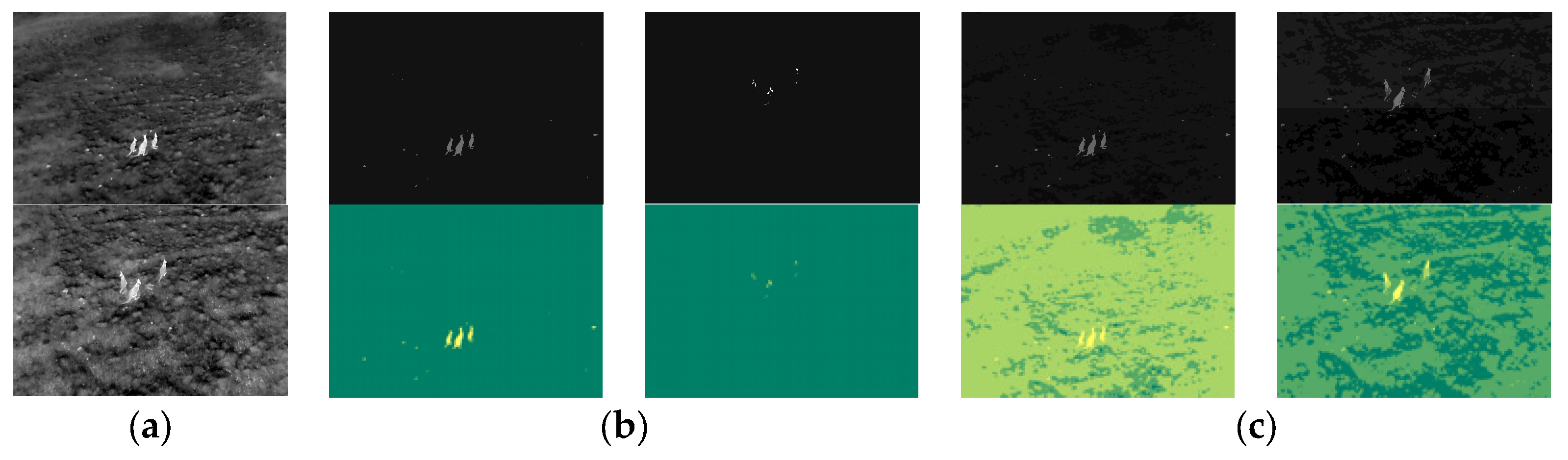
4.3. Visual Evaluation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Shannon, C.E. A Mathematical Theory of Communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]
- Bhuvana, J.; Gautam, C.K.; Bishnoi, A.K. Entropy-Based Analysis of Data Compression Techniques for Information Efficiency. In Proceedings of the 2024 International Conference on Optimization Computing and Wireless Communication (ICOCWC), Debre Tabor, Ethiopia, 29–30 January 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Cover, T.M.; Thomas, J.A. Elements of Information Theory; Wiley: Hoboken, NJ, USA, 2006. [Google Scholar]
- Ayunts, H.; Grigoryan, A.; Agaian, S. Novel Entropy for Enhanced Thermal Imaging and Uncertainty Quantification. Entropy 2024, 26, 374. [Google Scholar] [CrossRef]
- Agaian, S.; Ayunts, H.; Trongtirakul, T.; Hovhannisyan, S. A New Method For Judging Thermal Image Quality with Applications. Signal Process. 2025, 229, 109769. [Google Scholar] [CrossRef]
- Benbelkacem, S.; Oulefki, A.; Agaian, S.; Zenati-Henda, N.; Trongtirakul, T.; Aouam, D.; Masmoudi, M.; Zemmouri, M. COVI3D: Automatic COVID-19 CT image-based classification and visualization platform utilizing virtual and augmented reality technologies. Diagnostics 2022, 12, 649. [Google Scholar] [CrossRef] [PubMed]
- Benbelkacem, S.; Oulefki, A.; Agaian, S.S.; Trongtirakul, T.; Aouam, D.; Zenati-Henda, N.; Amara, K. Lung infection region quantification, recognition, and virtual reality rendering of CT scan of COVID-19. Proc. SPIE 2021, 11734, 117340I. [Google Scholar] [CrossRef]
- Oulefki, A.; Agaian, S.; Trongtirakul, T.; Laouar, A.K. Automatic COVID-19 lung infected region segmentation and measurement using CT-scans images. Pattern Recognit. 2021, 114, 107747. [Google Scholar] [CrossRef] [PubMed]
- Laštovička-Medin, G.; Karadžić, D. Investigating the Efficacy of Thermal Imaging as a Tool to Detect Stress in Domestic Animals. In Proceedings of the 2023 12th Mediterranean Conference on Embedded Computing (MECO), Budva, Montenegro, 6–10 June 2023; pp. 1–4. [Google Scholar] [CrossRef]
- Li, G.; Lin, Y.; Ouyang, D.; Li, S.; Luo, X.; Qu, X.; Pi, D.; Li, S.E. A RGB-Thermal Image Segmentation Method Based on Parameter Sharing and Attention Fusion for Safe Autonomous Driving. IEEE Trans. Intell. Transp. Syst. 2024, 25, 5122–5137. [Google Scholar] [CrossRef]
- Zhu, D.; Zhang, Y.; Gao, Q.; Lu, Y.; Sun, D. Infrared and Visible Image Fusion Using Threshold Segmentation and Weight Optimization. IEEE Sens. J. 2023, 23, 24970–24982. [Google Scholar] [CrossRef]
- Sangeetha, R.G.; Srivastava, Y.; Hemanth, C.; Naicker, H.S.; Kumar, A.P.; Vidhyadharan, S. Unmanned Aerial Surveillance and Tracking System in Forest Areas for Poachers and Wildlife. IEEE Access 2024, 12, 187572–187586. [Google Scholar] [CrossRef]
- Kabir, R.H.; Lee, K. Wildlife Monitoring Using a Multi-UAV System with Optimal Transport Theory. Appl. Sci. 2021, 11, 4070. [Google Scholar] [CrossRef]
- Ramadan, M.N.A.; Ali, M.A.H.; Khoo, S.Y.; Alkhedher, M. AI-Powered IoT and UAV Systems for Real-Time Detection and Prevention of Illegal Logging. Results Eng. 2024, 24, 103277. [Google Scholar] [CrossRef]
- Trongtirakul, T.; Agaian, S. Transmission map optimization for single image dehazing. Multimodal Image Exploit. Learn. 2022, 12100, 124–134. [Google Scholar]
- Trongtirakul, T.; Agaian, S.S.; Wu, S. Adaptive single low-light image enhancement by fractional stretching in logarithmic domain. IEEE Access 2023, 11, 143936–143947. [Google Scholar] [CrossRef]
- Chang, B.; Hwang, B.; Lim, W.; Kim, H.; Kang, W.; Park, Y.S.; Ko, D.W. Enhancing Wildlife Detection Using Thermal Imaging Drones: Designing the Flight Path. Drones 2025, 9, 52. [Google Scholar] [CrossRef]
- Ramírez-Ayala, O.; González-Hernández, I.; Salazar, S.; Flores, J.; Lozano, R. Real-Time Person Detection in Wooded Areas Using Thermal Images from an Aerial Perspective. Sensors 2023, 23, 9216. [Google Scholar] [CrossRef]
- Hou, F.; Zhang, Y.; Zhou, Y.; Zhang, M.; Lv, B.; Wu, J. Review on Infrared Imaging Technology. Sustainability 2022, 14, 11161. [Google Scholar] [CrossRef]
- Kumar, S.; Malik, S.; Sumathi, P. Deep Learning-Based Border Surveillance System Using Thermal Imaging. In Proceedings of the 2022 IEEE 19th India Council International Conference (INDICON), Kochi, India, 24–26 November 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Doull, K.E.; Chalmers, C.; Fergus, P.; Longmore, S.; Piel, A.K.; Wich, S.A. An Evaluation of the Factors Affecting ‘Poacher’ Detection with Drones and the Efficacy of Machine-Learning for Detection. Sensors 2021, 21, 4074. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.; Davies, R.; Wright, J.; Ablett, S.; Maskell, S. Identifying Behaviours Indicative of Illegal Fishing Activities in Automatic Identification System Data. J. Mar. Sci. Eng. 2025, 13, 457. [Google Scholar] [CrossRef]
- Dyke, J.; Kleidon, A. The Maximum Entropy Production Principle: Its Theoretical Foundations and Applications to the Earth System. Entropy 2010, 12, 613–630. [Google Scholar] [CrossRef]
- Parunak, H.V.D.; Brueckner, S. Entropy and Self-Organization in Multi-Agent Systems. In Proceedings of the Fifth International Conference on Autonomous Agents, Montreal, QC, Canada, 28 May–1 June 2001; pp. 124–130. [Google Scholar] [CrossRef]
- Panetta, K.; Gao, C.; Agaian, S. No Reference Color Image Contrast and Quality Measures. IEEE Trans. Consum. Electron. 2013, 59, 643–651. [Google Scholar] [CrossRef]
- Agaian, S.S.; Lentz, K.P.; Grigoryan, A.M. A New Measure of Image Enhancement. In Proceedings of the IASTED International Conference on Signal Processing & Communication, Malaga, Spain, 19–22 September 2000. [Google Scholar]
- Agaian, S.S.; Silver, B.; Panetta, K.A. Transform Coefficient Histogram-Based Image Enhancement Algorithms Using Contrast Entropy. IEEE Trans. Image Process. 2007, 16, 741–758. [Google Scholar] [CrossRef] [PubMed]
- Ayunts, H.; Agaian, S. No-Reference Quality Metrics for Image Decolorization. IEEE Trans. Consum. Electron. 2023, 69, 1177–1185. [Google Scholar] [CrossRef]
- Kapur, J.N.; Sahoo, P.K.; Wong, A.K.C. A New Method for Gray-Level Picture Thresholding Using the Entropy of the Histogram. Comput. Vis. Graph. Image Process. 1985, 29, 273–285. [Google Scholar] [CrossRef]
- Tsallis, C. Possible Generalization of Boltzmann-Gibbs Statistics. J. Stat. Phys. 1988, 52, 479–487. [Google Scholar] [CrossRef]
- Rényi, A. On Measures of Entropy and Information. Berkeley Symp. Math. Statist. Prob. 1961, 4, 547–561. [Google Scholar]
- Masi, M. A Step Beyond Tsallis and Rényi Entropies. Phys. Lett. A 2005, 338, 217–224. [Google Scholar] [CrossRef]
- Alomani, G.; Kayid, M. Further Properties of Tsallis Entropy and Its Application. Entropy 2023, 25, 199. [Google Scholar] [CrossRef] [PubMed]
- Fuentes, J.; Gonçalves, J. Rényi Entropy in Statistical Mechanics. Entropy 2022, 24, 1080. [Google Scholar] [CrossRef] [PubMed]
- Sen, H.; Agarwal, A. A Comparative Analysis of Entropy Based Segmentation with Otsu Method for Gray and Color Images. In Proceedings of the International Conference of Electronics, Communication and Aerospace Technology (ICECA), Coimbatore, India, 20–22 April 2017; pp. 113–118. [Google Scholar] [CrossRef]
- Wu, B.; Zhu, L.; Cao, J.; Wang, J. A Hybrid Preaching Optimization Algorithm Based on Kapur Entropy for Multilevel Thresholding Color Image Segmentation. Entropy 2021, 23, 1599. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Mohamed, R.; Abouhawwash, M. A New Fusion of Whale Optimizer Algorithm with Kapur’s Entropy for Multi-Threshold Image Segmentation: Analysis and Validations. Artif. Intell. Rev. 2022, 55, 6389–6459. [Google Scholar] [CrossRef]
- Kiani, H.; Safabakhsh, R.; Khadangi, E. Fast Recursive Segmentation Algorithm Based on Kapur’s Entropy. In Proceedings of the 2nd International Conference on Computer, Control and Communication, Karachi, Pakistan, 17–18 February 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Wenqi, J.; Xiaoguang, H. Kapur’s Entropy for Multilevel Thresholding Image Segmentation Based on Moth-Flame Optimization. Math. Biosci. Eng. 2021, 18, 7110–7142. [Google Scholar] [CrossRef]
- Bondi, E.; Jain, R.; Aggrawal, P.; Anand, S.; Hannaford, R.; Kapoor, A.; Piavis, J.; Shah, S.; Joppa, L.; Dilkina, B.; et al. BIRDSAI: A Dataset for Detection and Tracking in Aerial Thermal Infrared Videos. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision (WACV), Snowmass Village, CO, USA, 1–5 March 2020; pp. 1736–1745. [Google Scholar] [CrossRef]
- Rodríguez, R.; Garcés, Y.; Torres, E.; Sossa, H.; Tovar, R. A Vision From a Physical Point of View and the Information Theory on the Image Segmentation. J. Intell. Fuzzy Syst. 2019, 37, 2835–2845. [Google Scholar] [CrossRef]
- Zhang, K.; He, M.; Dong, L.; Ou, C. The Application of Tsallis Entropy Based Self-Adaptive Algorithm for Multi-Threshold Image Segmentation. Entropy 2024, 26, 777. [Google Scholar] [CrossRef] [PubMed]
- Nomura, R.; Yagi, H. Optimum Achievable Rates in Two Random Number Generation Problems with f-Divergences Using Smooth Rényi Entropy. Entropy 2024, 26, 766. [Google Scholar] [CrossRef]
- Jia, H.; Peng, X.; Song, W.; Oliva, D.; Lang, C.; Li, Y. Masi Entropy for Satellite Color Image Segmentation Using Tournament-Based Lévy Multiverse Optimization Algorithm. Remote Sens. 2019, 11, 942. [Google Scholar] [CrossRef]
- Wang, J.; Tan, Y.; Bo, X.; Li, G. Image Segmentation Method With Improved GA Optimization of Two-Dimensional Maximum Entropy. IEEE Access 2024, 12, 183279–183292. [Google Scholar] [CrossRef]
- Trongtirakul, T.; Agaian, S. Unsupervised and optimized thermal image quality enhancement and visual surveillance applications. Signal Process. Image Commun. 2022, 105, 116714. [Google Scholar] [CrossRef]
- Liu, Y.; Yan, H.; Liu, R.; Gao, Q.; Wu, Z.; Chen, X.; Meng, Q. Infrared Image Segmentation Method Based on Tsallis Entropy. In Proceedings of the 2024 3rd International Conference on Artificial Intelligence and Computer Information Technology (AICIT), Yichang, China, 20–22 September 2024; pp. 1–4. [Google Scholar] [CrossRef]
- Salas-Robles, J.E.; Biot-Monterde, V.; Antonino-Daviu, J.A. Current and Stray Flux Combined Analysis for Sparking Detection in DC Motors/Generators Using Shannon Entropy. Entropy 2024, 26, 744. [Google Scholar] [CrossRef]
- Ulhaq, A.; Adams, P.; Cox, T.E.; Khan, A.; Low, T.; Paul, M. Automated Detection of Animals in Low-Resolution Airborne Thermal Imagery. Remote Sens. 2021, 13, 3276. [Google Scholar] [CrossRef]
- Müller, D.; Soto-Rey, I.; Kramer, F. Towards a guideline for evaluation metrics in medical image segmentation. BMC Res. Notes 2022, 15, 210. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aspect | Genetic Algorithm (GA) [45] | Particle Swarm Optimization (PSO) [46] |
|---|---|---|
| Common Goals |
|
|
| Inspiration |
|
|
| Advantages |
|
|
| Disadvantages |
|
|
| Key Parameters |
|
|
| Application to Thresholding |
|
|
| Image | Shannon [48] | Tsallis [42] | Renyi [43] | |
|---|---|---|---|---|
| Original image | 28.7754 | 6.8363 | 0.9895 | 4.5582 |
| Image with pixels shuffled row-wise | 28.7754 | 6.8363 | 0.9895 | 4.5582 |
| Image with pixels shuffled column-wise | 28.7754 | 6.8363 | 0.9895 | 4.5582 |
| Fully shuffled image | 28.7754 | 6.8363 | 0.9895 | 4.5582 |
| Image | EME | EMEE | AME | AMEE | Proposed |
|---|---|---|---|---|---|
| Original image | 14.5007 | 0.7858 | 11.1357 | 0.4324 | 0.7076 |
| Image with pixels shuffled row-wise | 31.5322 | 20.5739 | 13.7218 | 0.6765 | 0.8706 |
| Image with pixels shuffled column-wise | 31.1548 | 20.8945 | 13.7203 | 0.6763 | 0.8707 |
| Fully shuffled image | 14.5007 | 0.7858 | 11.1357 | 0.4324 | 0.7076 |
| Image | DoE | EME | EMEE | AME | AMEE | Proposed |
|---|---|---|---|---|---|---|
 Image1 | 0% | 15.5717 | 0.9833 | 12.2236 | 0.5241 | 0.3245 |
| 25% | 16.0210 | 1.0582 | 12.6684 | 0.5666 | 0.3268 | |
| 50% | 16.3847 | 1.1297 | 12.9094 | 0.5906 | 0.3292 | |
| 75% | 16.7365 | 1.2205 | 13.0533 | 0.6055 | 0.3312 | |
| 100% | 17.0714 | 1.3254 | 13.1471 | 0.6156 | 0.3332 | |
 Image2 | 0% | 15.3141 | 0.9125 | 12.2881 | 0.5324 | 0.3271 |
| 25% | 15.6861 | 0.9682 | 12.6490 | 0.5667 | 0.3288 | |
| 50% | 16.0095 | 1.0253 | 12.8522 | 0.5867 | 0.3304 | |
| 75% | 16.3286 | 1.0948 | 12.9693 | 0.5989 | 0.3317 | |
| 100% | 16.6670 | 1.1881 | 13.0366 | 0.6064 | 0.3327 | |
 Image3 | 0% | 15.0002 | 0.8751 | 11.6894 | 0.4758 | 0.3084 |
| 25% | 15.4134 | 0.9405 | 12.3179 | 0.5325 | 0.3114 | |
| 50% | 15.7595 | 1.0040 | 12.6592 | 0.5648 | 0.3143 | |
| 75% | 16.0816 | 1.0770 | 12.8633 | 0.5852 | 0.3172 | |
| 100% | 16.3864 | 1.1613 | 13.0039 | 0.5996 | 0.3200 |
| Metric | Description | Mathematical Formulations |
|---|---|---|
| Accuracy | Measures the overall proportion of correctly classified pixels, including foreground and background. A general measure of classification performance. | |
| Boundary F1 (BF) Score | Evaluates how well predicted boundaries match ground-truth edges, using F1 score principles at the object boundary level. This is critical for applications requiring precise contour alignment. | |
| Sørensen–Dice Similarity Coefficient (DSC) | Measures the overlap between predicted and ground-truth regions, emphasizing correct segmentation of object areas. Also known as the Dice coefficient or F1 score. | |
| Jaccard Similarity (IoU) | Assesses the ratio between the intersection and union of the predicted and ground-truth masks. This is useful for understanding overall spatial accuracy. | |
| Precision | Indicates the proportion of correctly predicted positives among all positive predictions, representing prediction reliability. | |
| Recall (Sensitivity) | Measures the proportion of correctly predicted positives among all actual positives, indicating detection completeness. |
| Metric | Advantages | Disadvantages |
|---|---|---|
| Accuracy |
|
|
| Boundary F1 (BF) Score |
|
|
| Sørensen–Dice Similarity Coefficient (DSC) |
|
|
| Jaccard Similarity (IoU) |
|
|
| Precision |
|
|
| Recall (Sensitivity) |
|
|
| Entropy Method | Image | Number of Thresholds | ||
|---|---|---|---|---|
| k = 1 | k = 2 | k = 3 | ||
| Shannon [48] | Image4 | 0.9852 | 0.8247 | 0.8751 |
| Image5 | 0.1861 | 0.9979 | 0.0297 | |
| Image6 | 0.9964 | 0.0952 | 0.0952 | |
| Tsallis [42] | Image4 | 0.9802 | 0.0482 | 0.0482 |
| Image5 | 0.9887 | 0.0297 | 0.0297 | |
| Image6 | 0.9601 | 0.0756 | 0.0756 | |
| Renyi [43] | Image4 | 0.9734 | 0.9871 | 0.9938 |
| Image5 | 0.9877 | 0.9937 | 0.9971 | |
| Image6 | 0.9458 | 0.9770 | 0.9899 | |
| Kapur [4] | Image4 | 0.9703 | 0.9663 | 0.9880 |
| Image5 | 0.9857 | 0.9955 | 0.9955 | |
| Image6 | 0.9401 | 0.9841 | 0.9841 | |
| Masi [44] | Image4 | 0.9924 | 0.9951 | 0.9956 |
| Image5 | 0.9945 | 0.9964 | 0.9974 | |
| Image6 | 0.9841 | 0.9957 | 0.9978 | |
| Proposed | Image4 | 0.9997 | 0.9847 | 0.9751 |
| Image5 | 0.9990 | 0.9918 | 0.9877 | |
| Image6 | 0.9978 | 0.9672 | 0.9458 | |
| Entropy Method | Image | Number of Thresholds | ||
|---|---|---|---|---|
| k = 1 | k = 2 | k = 3 | ||
| Shannon [48] | Image4 | 0.9233 | 0.3676 | 0.4245 |
| Image5 | 0.0819 | 0.9862 | 0.0673 | |
| Image6 | 0.9263 | 0.1513 | 0.1513 | |
| Tsallis [42] | Image4 | 0.8632 | 0.0000 | 0.0000 |
| Image5 | 0.9227 | 0.0673 | 0.0673 | |
| Image6 | 0.8818 | 0.2028 | 0.2028 | |
| Renyi [43] | Image4 | 0.7601 | 0.9380 | 0.9788 |
| Image5 | 0.9061 | 0.9638 | 0.9986 | |
| Image6 | 0.8447 | 0.9510 | 0.9892 | |
| Kapur [4] | Image4 | 0.7109 | 0.6389 | 0.9423 |
| Image5 | 0.8861 | 0.9877 | 0.9877 | |
| Image6 | 0.8093 | 0.9801 | 0.9801 | |
| Masi [44] | Image4 | 0.9698 | 0.9893 | 0.9944 |
| Image5 | 0.9733 | 0.9965 | 0.9964 | |
| Image6 | 0.9801 | 0.9917 | 0.9541 | |
| Proposed | Image4 | 0.9821 | 0.9179 | 0.7939 |
| Image5 | 0.8964 | 0.9444 | 0.9061 | |
| Image6 | 0.9412 | 0.9151 | 0.8447 | |
| Entropy Method | Image | Number of Thresholds | ||
|---|---|---|---|---|
| k = 1 | k = 2 | k = 3 | ||
| Shannon [48] | Image4 | 0.8148 | 0.3508 | 0.4314 |
| Image5 | 0.0550 | 0.9532 | 0.0465 | |
| Image6 | 0.9755 | 0.1367 | 0.1367 | |
| Tsallis [42] | Image4 | 0.7351 | 0.0905 | 0.0905 |
| Image5 | 0.6873 | 0.0465 | 0.0465 | |
| Image6 | 0.6136 | 0.1342 | 0.1342 | |
| Renyi [43] | Image4 | 0.6093 | 0.8425 | 0.9298 |
| Image5 | 0.6497 | 0.8451 | 0.9353 | |
| Image6 | 0.3907 | 0.8088 | 0.9239 | |
| Kapur [4] | Image4 | 0.5442 | 0.4478 | 0.8551 |
| Image5 | 0.5655 | 0.8950 | 0.8950 | |
| Image6 | 0.2814 | 0.8749 | 0.8749 | |
| Masi [44] | Image4 | 0.9125 | 0.9450 | 0.9517 |
| Image5 | 0.8673 | 0.9172 | 0.9408 | |
| Image6 | 0.8749 | 0.9690 | 0.9846 | |
| Proposed | Image4 | 0.9966 | 0.8067 | 0.6440 |
| Image5 | 0.9799 | 0.7890 | 0.6497 | |
| Image6 | 0.9850 | 0.7035 | 0.3907 | |
| Entropy Method | Image | Number of Thresholds | ||
|---|---|---|---|---|
| k = 1 | k = 2 | k = 3 | ||
| Shannon [48] | Image4 | 0.6874 | 0.2127 | 0.2750 |
| Image5 | 0.0283 | 0.9106 | 0.0238 | |
| Image6 | 0.9523 | 0.0733 | 0.0733 | |
| Tsallis [42] | Image4 | 0.5218 | 0.0474 | 0.0474 |
| Image5 | 0.5235 | 0.0238 | 0.0238 | |
| Image6 | 0.4426 | 0.0719 | 0.0719 | |
| Renyi [43] | Image4 | 0.4381 | 0.7278 | 0.8689 |
| Image5 | 0.4811 | 0.7318 | 0.8785 | |
| Image6 | 0.2428 | 0.6789 | 0.8586 | |
| Kapur [4] | Image4 | 0.3739 | 0.2885 | 0.7469 |
| Image5 | 0.3943 | 0.8099 | 0.8099 | |
| Image6 | 0.1637 | 0.7776 | 0.7776 | |
| Masi [44] | Image4 | 0.8390 | 0.8957 | 0.9079 |
| Image5 | 0.7656 | 0.8470 | 0.8882 | |
| Image6 | 0.7776 | 0.9398 | 0.9696 | |
| Proposed | Image4 | 0.9933 | 0.6761 | 0.4749 |
| Image5 | 0.9607 | 0.6515 | 0.4811 | |
| Image6 | 0.9704 | 0.5426 | 0.2428 | |
| Entropy Method | Image | Number of Thresholds | ||
|---|---|---|---|---|
| k = 1 | k = 2 | k = 3 | ||
| Shannon [48] | Image4 | 1.0000 | 0.2127 | 0.2750 |
| Image5 | 0.0283 | 0.9969 | 0.0238 | |
| Image6 | 0.9523 | 0.0733 | 0.0733 | |
| Tsallis [42] | Image4 | 1.0000 | 0.0474 | 0.0474 |
| Image5 | 1.0000 | 0.0238 | 0.0238 | |
| Image6 | 1.0000 | 0.0719 | 0.0719 | |
| Renyi [43] | Image4 | 1.0000 | 1.0000 | 1.0000 |
| Image5 | 1.0000 | 1.0000 | 0.9998 | |
| Image6 | 1.0000 | 1.0000 | 1.0000 | |
| Kapur [4] | Image4 | 1.0000 | 1.0000 | 1.0000 |
| Image5 | 1.0000 | 1.0000 | 1.0000 | |
| Image6 | 1.0000 | 1.0000 | 1.0000 | |
| Masi [44] | Image4 | 1.0000 | 1.0000 | 1.0000 |
| Image5 | 1.0000 | 1.0000 | 0.9992 | |
| Image6 | 1.0000 | 0.9985 | 0.9780 | |
| Proposed | Image4 | 0.9933 | 1.0000 | 1.0000 |
| Image5 | 0.9607 | 1.0000 | 1.0000 | |
| Image6 | 0.9704 | 1.0000 | 1.0000 | |
| Entropy Method | Image | Number of Thresholds | ||
|---|---|---|---|---|
| k = 1 | k = 2 | k = 3 | ||
| Shannon [48] | Image4 | 0.6874 | 1.0000 | 1.0000 |
| Image5 | 1.0000 | 0.9132 | 1.0000 | |
| Image6 | 1.0000 | 1.0000 | 1.0000 | |
| Tsallis [42] | Image4 | 0.5812 | 1.0000 | 1.0000 |
| Image5 | 0.5235 | 1.0000 | 1.0000 | |
| Image6 | 0.4426 | 1.0000 | 1.0000 | |
| Renyi [43] | Image4 | 0.4381 | 0.7278 | 0.8689 |
| Image5 | 0.4811 | 0.7318 | 0.8787 | |
| Image6 | 0.2428 | 0.6789 | 0.8586 | |
| Kapur [4] | Image4 | 0.3739 | 0.2885 | 0.7469 |
| Image5 | 0.3943 | 0.8099 | 0.8099 | |
| Image6 | 0.1637 | 0.7776 | 0.7776 | |
| Masi [44] | Image4 | 0.8390 | 0.8957 | 0.9079 |
| Image5 | 0.7656 | 0.8470 | 0.8889 | |
| Image6 | 0.7776 | 0.9412 | 0.9912 | |
| Proposed | Image4 | 1.0000 | 0.6761 | 0.4749 |
| Image5 | 1.0000 | 0.6515 | 0.4811 | |
| Image6 | 1.0000 | 0.5426 | 0.2428 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trongtirakul, T.; Panetta, K.; Grigoryan, A.M.; Agaian, S.S. A Novel Entropy-Based Approach for Thermal Image Segmentation Using Multilevel Thresholding. Entropy 2025, 27, 526. https://doi.org/10.3390/e27050526
Trongtirakul T, Panetta K, Grigoryan AM, Agaian SS. A Novel Entropy-Based Approach for Thermal Image Segmentation Using Multilevel Thresholding. Entropy. 2025; 27(5):526. https://doi.org/10.3390/e27050526
Chicago/Turabian StyleTrongtirakul, Thaweesak, Karen Panetta, Artyom M. Grigoryan, and Sos S. Agaian. 2025. "A Novel Entropy-Based Approach for Thermal Image Segmentation Using Multilevel Thresholding" Entropy 27, no. 5: 526. https://doi.org/10.3390/e27050526
APA StyleTrongtirakul, T., Panetta, K., Grigoryan, A. M., & Agaian, S. S. (2025). A Novel Entropy-Based Approach for Thermal Image Segmentation Using Multilevel Thresholding. Entropy, 27(5), 526. https://doi.org/10.3390/e27050526